Embed Size (px)
Citation preview

MAT - 122 - Álgebra Linear IFísica - Diurno
Exercícios para a 1ªProva
Paulo F. Leite,
com a colaboração de Jéssica C. Paixão
Fevereiro de 2012
1 Espaços Vetoriais e Subespaço Vetoriais
De�nição 1 Dizemos que um conjunto V, cujos elementos chamaremos
de vetores, é um espaço vetorial sobre um corpo IK cujos elementos
chamaremos de escalares se as condições 1) e 2) abaixo, estiverem sat-
isfeitas.
1) Está de�nida uma operação de adição entre elementos de V sat-
isfazendo as propriedades:
A1) Quaisquer que sejam u e v em V, u+ v = v+ u
A2) Quaisquer que sejam u , v , w em V , (u+v)+w = u+(v+w)
A3) Existe um elemento neutro para a adição em V, isto é , existe
um elemento em V, que indicaremos por 0, satifazendo a condição
u+ 0 = u qualquer que seja u ∈ V.
A4) Qualquer elemento u de V possui um simétrico aditivo, isto é,
qualquer que seja u em V existe um elemento de V que indicaremos
por −u tal que u+ (−u) = 0
1

2) Está de�nida uma operação de multiplicação de elementos de
V por elementos do corpo IK satisfazendo para todos os elementos do
corpo e para todos os vetores u de V, as seguintes propriedades:
M1) (α+ β)u = αu+ βu
M2) α(u+ v) = αu+ αv
M3) (αβ)u = α(βu)
M4) 1.u = u
1.1 Propriedades que Decorrem Imediatamente da De�nição de Es-
paço Vetorial
1. Propriedade do cancelamento para a adição :
Se u+w = v+w então u = v.
2. Se α ∈ IR e 0 ∈ V então α0 = 0 .
3. Se 0 ∈ IR e u ∈ V então 0u = 0 .
4. Regra dos sinais :
α(−u) = (−α)u = −(αu)
5. Se αu = 0 então α = 0 ou u = 0
6. Se αu = βu e u 6= 0 então α = β
7. Se αu = αv e α 6= 0 então u = v
8. Existe um único elemento neutro para a adição.
9. O oposto ( simétrico) de um vetor é único.
2

1.2 Exemplos de Espaços Vetoriais
Veri�que que em cada um dos exemplos abaixo, o conjunto V, com asoperações indicadas, é um espaço vetorial.
1. V = IK � espaço vetorial
IK � corpo de escalares
Adição � adição usual de elementos do corpo IK.
Multiplicação de vetor por Escalar � multiplicação usual dos elemen-tos do corpo IK.
2. V = L e K, K ⊂ L, é um subcorpo de L.
IK � corpo de escalares.
Casos particulares:
(a) L = IC � complexos e IK = IR � reais
3. V = IKn Conjunto das n-uplas de elementos do corpo IK.
A adição de vetores de V = IKn é de�nida pela igualdade
- (u1,u2, . . . ,un) + (v1, v2, . . . , vn) = (u1 + v1,u2 + v2, . . . ,un + vn)
multiplicação por escalar - λ(u1,u2, . . . ,un) = (λu1, λu2, . . . , λun)
4. Mm×n(IR) Matrizes retangulares com m linhas e n colunas
adição - adição usual de matrizes.
multiplicação por escalar multiplicação usual de matrizes por númerosreais.
3

5. d) V = P(IR) Polinômios de uma variável com coe�cientes reais
adição - adição usual de polinômios.
multiplicação por escalar multiplicação usual de polinômio por númeroreal.
6. Prove que os itens abaixo são exemplos de espaços vetoriais:
(a) V = IR (vetores) K = IR (escalares)
(b) V = IR (vetores) K = lQ (escalares)
(c) V = IC (vetores) K = IR (escalares)
(d) V = IC (vetores) K = lQ (escalares)
(e) V =Mm×n(IR) (vetores) K = IR (escalares)
(f) V = IR[X] (vetores) K = IR (escalares)
(g) V = F(IR) funções de IR em IR K = IR (escalares)
(h) V = C(IR) funções contínuas de IR em IR K = IR (escalares).
7. Seja X um conjunto qualquer, não vazio, e IRX o conjunto de todas asfunções de X em IR. Nessas condições, com a adição usual de funçõese a multiplicação usual de funções por números reais IRX adquire aestrutura de um espaço vetorial sobre IR.
8. Seja X um conjunto qualquer e IR(X) o conjunto das funções, quase
nulas, de X em IR. Dizemos que uma função Xf−−−−→ IR é quase-nula
se se tivermos f(x) = 0, salvo em um número �nito de pontos de X.É claro que IR(X) ⊂ IRX. Mostre que IR(X) é um subespaço vetorial deIRX e, portanto, um espaço vetorial.
Observe que se X é um conjunto �nito, então IR(X) = IRX
∗ Veremos, mais adiante, quando de�nirmos base de um espaço vetorial, que existe
uma correspondência bijetora entre o conjunto X e uma base de IR(X). Isso permite concluir
que existem espaços vetoriais com bases de qualquer cardinalidade. ∗
4

1.3 Subespaços Vetoriais
De�nição 2 Dizemos que um subconjunto S, não vazio, de um espaço
vetorial V é um subespaço vetorial de V se as seguintes condições es-
tiverem satisfeitas:
a) ∀u, v ∈ S ⇒ u+ v ∈ S
b) ∀λ ∈ IR , ∀v ∈ S ⇒ λv ∈ S
Obs. Decorre imediatamente das condições a) e b) acima que se S é umsubespaço vetorial, então 0 ∈ S. (veri�que isso!). Por causa disso, a ver-i�cação de que um subconjunto S de V é um subespaço vetorial pode serfeita mostrando que S satisfaz as condições abaixo:
1. 0 ∈ S
2. ∀u, v ∈ S ⇒ u+ v ∈ S
3. ∀λ ∈ IR , ∀v ∈ S ⇒ λv ∈ S
A veri�cação da condição 1) acima, corresponde a veri�cação de que S 6= ∅
1.4 Exercícios
1. Considere o sistema linear homogêneo2x− 3y+ z = 0x+ y− z = 0x− 4y+ 2z = 0
Prove que o conjunto S de vetores de IR3 que satisfazem esse sistema,formam um subespaço de IR3. O número de vetores desse subspaço é�nito?
2. Considere a equação matricial abaixo onde A é uma matriz quadradade ordem n e x e b são matrizes coluna com n linhas
Ax = b
5

Considere ainda o subespaço vetorial SH de Mn×1(IR)
SH = {x ∈Mn×1(IR) : Ax = 0}
e o subconjunto S de Mn×1(IR)
S = {x ∈Mn×1(IR) : Ax = b}
Prove queS = SH + xP
onde xP é uma matriz deMn×1(IR) tal que AxP = b , isto é, xP é umasolução particular da equação (1).
3. Considere o sistema linear{−2x1 + x2 + x3 + x4 = −2
x2 + x3 − x4 = 2
Exiba a solução geral desse sistema na forma do exercício anterior.
4. Seja Pn(IR) o subconjunto do espaço vetorial P(IR) de�nido por
Pn(IR) = { p ∈ P(IR) : p é nulo ou grau p 6 n }
Prove que Pn(IR) é um subespaço vetorial de P(IR)
5. Prove que em qualquer espaço vetorial vale a formula: 2u = u+ u
6. Prove que o axioma da comutatividade da adição num espaço vetorialdecorre dos outros axiomas que de�nem um espaço vetorial sendoportanto desnecessário.
sugestão: Desenvolva o produto (1+1)(u+v) de duas maneiras difer-entes.
7. De exemplo de um conjunto V munido de uma operação de adição ede uma operação de multiplicação por escalar satisfazendo todos osaxiomas que de�nem um espaço vetorial com exceção do axiomaM4)
que garante que para todo vetor 1u = u. Conclua que o axioma M4)
é independente dos outros axiomas, isto é, não é conseqüência deles.
6

8. Mostre que os vetores de F(IR) de�nidos abaixo não estão em P(IR)
(a) f(x) = 3√x
(b) f(x) = |x|
(c) f(x) = 3√x+ 5√x
(d) f(x) = 1+ x− x5 + 2 3√x2 + 4 5
√x4
(e) f(x) = sinx
(f) f(x) = ex
9. Mostre que
R[0, 1] = { f ∈ F[0, 1] : f é Riemann integrável }
munido das operações usuais de adição de funções e de multiplicaçãode uma função por um número real é um subespaço vetorial de F[0, 1].
10. De�nição Seja IRf−−−−→ IR uma função de F(IR, IR). Dizemos que:
(a) A função f é uma função par se ∀x ∈ IR f(−x) = f(x)
(b) A função f é uma função impar se ∀x ∈ IR f(−x) = −f(x)
11. De exemplo de uma função que não é nem par nem impar.
12. Mostre que se uma função é simultaneamente par e impar, então elaé a função nula.
13. De exemplos de funções, não polinomiais, pares e impares.
14. Mostre que:
(a) A soma de duas funções pares é uma função par.
(b) O produto de uma função par por um número real é uma funçãopar.
(c) Para as funções impares valem propriedades análogas às pro-priedades enunciadas nos itens (a) e (b) acima.
7
(d) O produto de duas funções pares é uma função par e que o produtode duas funções impares é uma função par.
(e) O produto de uma função par por uma função impar é uma funçãoimpar.
15. De um critério que permite caracterizar quando uma função polinomial
é par e quando ela é impar
16. Mostre que:
(a) F(IR, IR)P , isto é, o conjunto das funções pares formam um sub-spaço vetorial de F(IR, IR).
(b) F(IR, IR)I , isto é, o conjunto das funções impares formam umsubspaço vetorial de F(IR, IR).
(c) F(IR, IR)P ∩ F(IR, IR)I = {0}
(d) Mostre que qualquer função de F(IR, IR) é soma de uma funçãopar com uma função impar.
Usamos a notação:
F(IR, IR)P ⊕ F(IR, IR)I = F(IR, IR)
para indicar que as propriedades dos itens (c) e (d) estão satis-feitas e dizemos que F(IR, IR) é uma soma direta de seus subespaços
F(IR, IR)P e F(IR, IR)I.
(e) Prove que toda função f ∈ F(IR, IR) = F(IR, IR)P ⊕ F(IR, IR)I seescreve, de maneira única, como soma de uma função par comuma função impar.
2 Combinações Lineares e Sistema de Geradores
De�nição 3 Seja X um subconjunto, não vazio, do espaço vetorial V.
Dizemos que um vetor u de V é uma combinação linear de vetores de
X se existirem um subconjunto, �nito e não vazio {x1, x2, . . . , xk}, de
vetores de X e escalares λ1, . . . , λk de tal forma que
u = λ1x1 + . . .+ λkxk
8

Indicaremos por CL(X) o conjunto de todos os vetores de V que sãocombinações lineares de vetores de X, mais explicitamente,
CL(X) = {u ∈ V : u é combinação linear de vetores de X}
É importante chamar a atenção para o fato de que dizer que o vetor ué uma combinação linear de vetores de um conjunto X, independentementede X ser �nito ou in�nito, é dizer que u pode ser escrito como
u = λ1x1 + . . .+ λkxk
isto é, como uma soma �nita de vetores. Quando trabalhamos num con-texto puramente algébrico, somas in�nitas não estão de�nidas, nem fazemsentido o menor sentido. Em certas ocasiões (principalmente nos exem-plos) trabalhamos com somas in�nitas de números reais ou de númeroscomplexos onde a idéia de convergencia faz sentido. Em geral, o contextodeixa perfeitamente claro se estamos num caso ou no outro.
Apesar disso, sempre que acharmos que a expressão pleonástica �com-
binação linear �nita � contribuir para a clareza do texto, não hesitaremosem usá-la.
Resumiremos as propriedades básicas de CL(X) na seguinte proposição.
Proposição 1 Se X é um subconjunto, não vazio, de V, valem as pro-
priedades:
1. X ⊆ CL(X)
2. CL(X) é um subespaço vetorial de V.
3. Se X e Y são subconjuntos de V e X ⊆ Y então, CL(X) ⊆ CL(Y).
4. CL(X) = X ⇐⇒ X é um subespaço vetorial de V.
5. Se S é um subespaço de V e X ⊆ S, então CL(X) ⊆ S.
6. Se X ⊆ CL(Y), então CL(X ∪ Y) = CL(Y).
9
Demonstração.Sendo x = 1x e 0 = 0x particulares combinações lineares de elementos de
X temos que X ⊆ CL(X) e que 0 ∈ CL(X) . Como é imediato que multiplose somas de vetores de CL(X) estão em CL(X) concluimos que CL(X) éum subespaço vetorial. Uma vez que o item 3 decorre imediatamente dade�nição de CL(X), vamos demonstrar a implicação
X é um subespaço vetorial de V =⇒ X = CL(X)
do item 4 pois a implicação no outro sentido é uma conseqüência óbvia de2 . Como já vimos no item 1 que, em qualquer circunstância, vale a inclusãoX ⊆ CL(X), basta mostrar que se X é um subespaço vetorial, CL(X) ⊆ X.Mas isso decorre do fato de qualquer combinação linear de vetores de umsubespaço ser um vetor desse subespaço. Consideremos agora o item 5 .Por 3 temos que CL(X) ⊆ CL(S) mas como S é um subespaço vetorial,temos por 4 que CL(S) = S e portanto que CL(X) ⊆ S. Isso conclui ademonstração desse item e da proposição.
A maior parte dos textos de Algebra Linear usa a noção de combinação
linear, que acabamos de de�nir, para introduzir o conceito de sistema
de geradores de um subespaço vetorial. Esses livros adotam a seguintede�nição.
De�nição 4 Seja V um espaço vetorial e S um subespaço vetorial de V.
Dizemos que um subconjunto, não vazio, X ( �nito ou não) de V é um
sistema de geradores de S se CL(X) = S. Se CL(X) = V dizemos que X
é um sistema de geradores de V.
Essa é, como dissemos, uma de�nição muito usada, perfeitamente cor-reta e que o leitor poderá, sem maiores inconvenientes, adotar essa comosendo a sua de�nição de sistema de geradores.
Ela apresenta, no entanto, um pequeno inconveniente. Por só ter sentidoquando X 6= ∅, torna o caso X = ∅ excepcional e, para evitarmos exceções,temos que adotar, como convenção, que [∅] = {0}.
10
Usando fatos que de qualquer maneira são básicos e precisam ser con-hecidos podemos dar uma de�nição mais abrangente de sistema de ger-adores que evita tratar o conjunto vazio como caso excepcional e que co-incide com a de�nição que acabamos de dar quando X 6= ∅. Começamoscom algumas resultados simples e importantes.
1. Mostre que se I é a intersecção de dois subespaços de um espaçovetorial V, então I é um subspaço vetorial de V.
2. Seja {Si}i∈J uma família de subespaços de V, indexada por um con-junto J, que não precisa ser �nito e nem mesmo enumerável.Prove que a intersecção
S =⋂i∈J
Si
de todos os subespaços Si , i ∈ J , é um subespaço vetorial de V.
3. Mostre que se I é a intersecção de todos os subespaços de um espaçovetorial V, então I = {0}.
4. Seja X um subconjunto qualquer do espaço vetorial V. Seja [X] a in-tersecção de todos os subespacos vetoriais de V que contém X. Mostreque [X] é um subespaço vetorial de V. Mostre que se X = ∅, então[X] = {0}, isto é, [∅] = {0}
5. Seja V um espaço vetorial tal que X um subconjunto de V tal queX 6= ∅. Mostre que CL(X) = [X].
Os exercícios acima sugerem a seguinte de�nição para sistema de ger-adores de um subespaço.
De�nição 5 Seja V um espaço vetorial e S um subespaço vetorial
de V. Dizemos que um subconjunto X (�nito ou não) de V é um
sistema de geradores de S se [X] = S. Em particular, se [X] = V,
dizemos que X é um sistema de geradores do espaço vetorial V.
11

Obs. Note que nessa de�nição, não foi necessário exigir que X 6= ∅mas que, com essa hipótese, ela coincide com a de�nição anterior.Além disso, ela inclue o caso em que X = ∅. E nesse caso, temos[∅] = {0}.
É importante observar que entre os diversos exemplos de espaços ve-torias com que lidamos até agora, alguns são �nitamente gerados,isto é, possuem um conjunto de geradores com um número �nito
de vetores, outros só admitem conjuntos geradores com um número
in�nito de vetores. Dizemos nesse caso que os espaços não são �ni-
tamente gerados.
É, no entanto, fundamental ter em mente o seguinte fato:
Seja G é um sistema de geradores de espaço vetorial V e x um ve-tor qualquer de V. Independentemente de V ser ou não �nitamentegerado, x se escreve como combinação linear �nita de vetores de G.
IRk, com k > 0, Pn(IR) e MmnIR são exemplos de espaços vetoriais�nitamente gerados. Exiba, para cada um desses espaços vetoriais,um conjunto �nito de geradores.
Um exemplo de espaço vetorial que não é �nitamente gerado é oformado pelos polinômios de uma variável com coe�cientes reais.
6. Exemplo. P(IR) não é �nitamente gerado.
Observação importante.
O fato de sabermos que o conjunto in�nito
{1, x, x2, . . . , xn, . . .}
é um sistema de geradores de P(IR) não prova que P(IR) não é �nita-mente gerado, pois, a princípio, nada impediria que pudesse haver umoutro subconjunto de vetores de P(IR) que fosse �nito e que gerasseP(IR).
Vamos então demonstrar que isso não acontece, isto é, que P(IR) nãoé �nitamente gerado.
12

De fato, seja A um conjunto qualquer, mas �nito, de P(IR). Supon-hamos, por absurdo, que A gera P(IR). Como A é �nito, existe umpolinômio de maior grau em A. Seja m o grau desse polinômio. Éclaro que nenhum polinômio de grau maior do que m é combinaçãolinear de polinômios de A. Portanto, A não pode gerar P(IR), isto é,nenhum conjunto �nito pode gerar P(IR).
2.1 Exerc�cios
1. Mostre que todo espaço vetorial possui um sistema de geradores.
2. Mostre que se u1,u2, . . . ,un são vetores de um espaço vetorial V eλ1, λ2, . . . , λn, números reais, não nulos, então vale a igualdade
[u1,u2, . . . ,un] = [λ1u1, λ2u2, . . . , λnun]
3. Dê exemplo de dois subconjuntos X e Y de um espaço vetorial V taisque [X] ⊆ [Y] mas X ( Y.
4. Sejam x1, x2, . . . xk e y1,y2, . . . ,yl, vetores de um espaço vetorial V.Mostre que uma condição necessária e su�ciente para que [X] = [Y] éque xi ∈ [Y] para i = 1, 2, . . .k e yj ∈ [X] para i = 1, 2, . . . l.
5. Sejam X e Y subconjuntos de um espaço vetorial V.
(a) Prove que [X ∩ Y] ⊂ [X] ∩ [Y]
(b) De um exemplo mostrando que, em geral, [X ∩ Y] 6= [X] ∩ [Y].
(Sugestão: faça X = {u} e Y = {2u}, com u 6= 0).
6. Seja X um subconjunto qualquer de um espaço vetorial V e suponhaque u1,u2, . . . ,un ∈ [X] ( Observe que esses vetores podem não estar
em X). Mostre que existe um subconjunto �nito Y de X tal que [Y]
contem os vetores u1,u2, . . . ,un.
13

7. Seja X um subconjunto qualquer de um espaço vetorial V e suponhaque u1,u2, . . . ,un ∈ [X] ( Observe que esses vetores podem não estar
em X). Mostre que existe um subconjunto �nito Y de X tal que [Y]
contem os vetores u1,u2, . . . ,un.
8. Se S é um subespaço vetorial de V, diferente de V, isto é, S V,então [V − S] = V.
Sol. Observe, inicialmente que a suposição de que S V é essencial pois, se tivermos
S = V, teremos que V−V = ∅ e portanto [V−V] = {0} e, nesse caso, o resultado só
é válido se V = {0}. Podemos então, sem perda de generalidade, supor que V 6= {0}
e S 6= {0}. É claro que V−S ⊂ [V−S] . Como V = (V−S)∪S, para obtermos a tese
basta mostrar que S ⊂ [V − S]. Seja então s um vetor qualquer de S e x ∈ (V − S),
x 6= 0. Os vetores s+x e s−x de V, não pertencem a S (Porque?). Estão, portanto,
em (V − S). Em consequência, (s+ x) + (s− x) = 2s está em [V − S], o que implica
que s ∈ [V − S]. Isso conclue a demonstração.
3 Dependência e Independência Linear
Vimos que qualquer vetor de um espaço vetorial V pode ser representadopor uma combinação linear de vetores pertencentes a um sistema de ger-adores G, desse espaço.
Uma pergunta natural e importante � e, que se tiver resposta a�r-mativa, vai nos permitir de�nir as �coordenadas de um vetor� � é seessa representação é única, isto é, se x é um vetor qualquer de V e seg1,g2, . . .gm,g1 ′,g2 ′, . . .gn ′, são vetores de G e se, além disso, x pode serescrito comox = α1g1 + α2g2 + · · ·+ αmgmx = α1
′g1′ + α2
′g2′ + · · ·+ αn
′gn′
podemos garantir que m = n e gi = gi′ i = 1, 2, . . . ,n
Podemos antecipar que a resposta é negativa, isto é, a representaçãonão é única. Um exemplo muito simples serve de ilustração.
Exemplo. Não unicidade da representação de vetores por sistemas degeradores.
14

Considere o espaço vetorial IR2 e o seu subconjunto
A = {(1, 0), (0, 1), (1, 1)}
A é claramente um sistema de geradores de IR2 mas o vetor (1, 1) admiteduas representações distintas:
1. (1, 1) = 1.(1, 0) + 1(0, 1)
2. (1, 1) = 1(1, 1)
Se quisermos ter unicidade de representação vamos precisar introduzirum conceito novo: o de independência linear.
Para motivar a de�nição desse novo conceito vamos simpli�car um poucoas coisas 1 e supor que o vetor x de V possa ser escrito das formas descritasabaixox = α1g1 + α2g2 + · · ·+ αmgmx = β1g1 + β2g2 + · · ·+ βmgmNesse caso, unicidade de representação, signi�ca simplesmente queαi = βi para i = 1, 2, . . .mVamos tentar demonstrar isso e ver que propriedades adicionais os ve-
tores g1,g2, . . . ,gm vão precisar satisfazer.Se subtrairmos membro a membro a segunda equação da primeira �z-
ermos as transformações convenientes �caremos com a equação
(α1 − β1)g1 + (α2 − β2)g2 + · · ·+ (αm − βm)gm = 0
Se soubermos que essa igualdade só é possível quando todos os coe�cientesdos vetores g1,g2, . . . ,gm forem nulos, teremos queαi = βi para i = 1, 2, . . . ,me, portanto, a unicidade desejada.
1Na realidade essa simpli�cação é apenas aparente e não acarreta nenhuma perda degeneralidade pois podemos acrescentar a cada uma das representações do vetor x os vetoresque não comparecem na outra representação tomando como coe�ciente desses vetoreszeros.
15

Esse cálculo, feito para provar a unicidade da representação, sugere qualdeve ser a de�nição que caracteriza a propriedade que os vetores do conjuntode geradores devem ter para garantir a unicidade da representação.
De�nição. Seja V um espaço vetorial e L um subconjunto, não vazio,�nito ou não, de V. Dizemos que o conjunto L é linearmente independente
se qualquer que seja o subconjunto �nito {l1, l2, · · · , ln} de vetores de L aequação
α1l1 + α2l2 + · · ·αnln = 0
só admitir como solução escalares que sejam todos nulos, em outras palavras,devemos terα1 = α2 = α3 · · · = αn = 0Quando essa condição não estiver satisfeita diremos que o conjunto
L é linearmente dependente ou, o que é a mesma coisa, que L não é
linearmente dependente.Obs. Essa é a de�nição de independencia linear que �gura na grande maioria dos
textos que tratam do assunto e aqui novamente o conjunto vazio aparece como um caso
excepcional. Mais adiante mostraremos que é possivel dar uma de�nição que coincide com
a que acabamos de dar no caso de conjuntos não vazios mas que por ser mais abrangente
inclue o conjunto vazio na classe dos conjuntos que são linearmente independentes.
1. ∗ Seja V um espaço vetorial. Mostre que V, isto é, o conjunto detodos os vetores do espaço vetorial V, é um conjunto linearmentedependente de V.
2. Seja A = (aij) ∈Mm×n(IR) tal que
i < j =⇒ aij = 0 e akk 6= 0
Mostre que as linhas de A, consideradas como vetores de IRn sãolinearmente independentes.
3. ∗ Seja V um espaço vetorial e A, B e G subconjuntos (�nitos ou não)de V. Prove que:
(a) Se A ′ ⊆ A e A é linearmente independente, então A ′ é linearmente
independente.
16
(b) Se B ⊆ B ′ e B é linearmente dependente, então B ′ é linearmente
dependente.
(c) Se G é um sistema de geradores de V e G G ′, então G ′ é linear-
mente dependente.
4. ∗ Seja a1,a2, . . .an, n > 1, uma sequência qualquer de vetores não
nulos, de um espaço vetorial V. Prove que uma condição necessária
e su�ciente para que essa sequência seja linearmente dependente é queexista um número natural k, 1 < k 6 n, tal que
ak = α1a1 + α1a1 + · · ·+ α2a2 + · · ·αk−1ak−1
5. ∗ Seja V um espaço vetorial e A 6= ∅ um subconjunto qualquer, maslinearmente independente, de V. Seja a1,a2, . . .ak uma sequêcia devetores de A. Mostre que essa sequência pode não ser linearmenteindependente.
Sol Para vermos isso, basta considerar a sequência a1,a2, de elementos de A, com
a1 = a2
6. ∗ Seja S um subespaço vetorial de V e x um vetor de V que não estáem S, isto é, tal que x /∈ S. Prove que se x1, x2, . . . xk são vetoreslinearmente independentes de S então o conjunto {x1, x2, . . . , xk, x}é linearmente independente.
Sol. Seja α1x1 + α2x2 + · · ·+ αkxk + αx = 0.
Devemos ter, necessáriamente, α = 0 pois, caso contrário, teríamos que x ∈ S o quecontraria a hipótese. Isso nos fornece
α1x1 + α2x2 + · · ·+ αkxk = 0.
Como os vetores x1, x2, . . . xk são, por hipótese, L.I., temos a tese.
7. Seja V um espaço vetorial e {0} = S0 S1 S2 · · · Sn = V
uma sequência subespaços de V. Se x1, x2, . . . xn é uma sequência devetores de V tais que xi ∈ Si mas xi /∈ Si−1, i = 1, 2, . . .n então asequência x1, x2, . . . xn é linearmente independente.
8. Se λ2, . . . , λn é um conjunto qualquer de escalares e u1, . . . ,un sãovetores de um espaço vetorial V, então as seguintes condições sãoequivalentes:
17

(a) {u1, . . . ,un} é linearmente independente.
(b) {u1,u2 + λ2u1, . . . ,un + λnu1} é linearmente independente.
xi ∈ [Y] para i = 1, 2, . . . l a) =⇒ b)
Deα1u1 + α2(u2 + λ2u1) + . . .+ αn(un + λnu1) = 0
Segue que
(α1 + α2λ2 + α3λ3 . . .αnλn)u1 + α2u2 + · · ·+ αnun = 0
e como {u1,u2, . . . ,un} é linearmente independente, temos que
α1 + α2λ2 + α3λ3 + . . .+ αnλn = 0
α2 = 0...
αn = 0
veri�ca-se imediatamente que a única solução desse sistema é:
α1 = α2 = · · · = αn = 0
e portanto o conjunto {u1,u2 + λ2u1, . . . ,un + λnu1} é linearmenteindependente.
a) ⇐= b)
Façamos inicialmente
{v1 = u1
vi = ui + λiu1 i = 2, . . . ,n
e consequentemente
18

{u1 = v1ui = vi − λiu1 i = 2, . . . ,n
(1)
Devemos provar agora que do fato de {v1, . . . , vn} ser, por hipótese,linearmente independente decorre que {u1, . . . ,un} é linearmente in-dependente.
Se escrevermos
α1u1 + . . .+ αnun = 0 (2)
e substituirmos os valores de ui dados por (1) em (2) ,teremos
α1v1 + α2(v2 − λ2v1) + . . .+ αn(vn − λnv1) = 0
ou ainda
(α1 − α2λ2 − . . .− αnλn)v1 + α2v2 + . . .αnvn = 0
e portanto, como {v1, . . . , vn} é linearmente independente,
α1 − α2λ2 − . . .− αnλn = 0α2 = 0...αn = 0
Veri�ca-se, imediatamente, que a única solução desse sistema é
α1 = α2 = . . . = αn = 0
e, portanto {u1, . . . ,un} é linearmente independente.
xi ∈ [Y] para i = 1, 2, . . . l
19

3.1 Exercícios
1. ∗ Veri�que se os vetores de F(IR), descritos nos ítems abaixo, são ounão, linearmente independentes:
(a) x e |x|
(b) x e cos(x)
(c) x e 3√x
(d) p é uma função polinômial e g ∈ F(IR, IR) não é função polinomial.
(e) f,g ∈ F(IR, IR) f par, g impar
(f) p1(x),p2(x), . . .pn(x) onde as funções são polinômios tais que sei 6= j, então grau pi 6= grau pl. (Note que não estamos exigindo
que grau pn = n)
4 Bases, Dimensão
1. Todo espaço vetorial �nitamente gerado possui uma base com umnúmero �nito de vetores.
Sol. Use indução �nita sobre o número de elementos de um conjunto gerador do
espaço vetorial
2. Seja V um espaço vetorial �nitamente gerado e G e L, respectiva-mente, um conjunto de geradores de V e um conjunto linearmente
independente de V. Se G for �nito, então L também será �nito e#L 6 #G.
#A indica o número de elementos de A.
Sol. Aqui também a idéia é usar indução �nita. Existe raciocínio �heurístico,� mas
bastante convincente, que sugere que esse fato é verdadeiro
3. Duas bases quaisquer de um espaço vetorial �nitamente gerado pos-suem o mesmo número de elementos.
Sol. Use o exercício acima e as condições que de�nem uma base
20

De�nição. Chama-se dimensão de um espaço vetorial o número deelementos de uma qualquer de suas bases.
4. Seja B um subconjunto com n elementos de um espaco vetorial V dedimenssão n. As seguintes a�rmações são equivalentes:
(a) B é linearmente independente.
(b) B é um sistema de geradores de V
(c) B é uma base de V.
5. Prove que qualquer que seja o número real a, o conjunto
B = {1, (x− a), (x− a)2, . . . , (x− a)k}
é uma base do espaço vetorial Pk(IR)
6. Prove que qualquer que seja o número real a, o conjunto
B = {1, (x− a), (x− a)2, . . . , (x− a)k · · · }
é uma base do espaço vetorial P(IR)
7. Seja V um espaço vetorial e A um conjunto linearmente independentede V. Mostre que existe B ⊂ V tal que A ⊆ B e B é base de V.
4.1 Coordenadas de um Vetor
1. De�nição. Seja V um espaço vetorial, V 6= {0}, E = {e1, e2, . . . ek} umabase (ordenada pelos índices) de V e u ∈ V, um vetor qualquer.Nessas condições, existem escalares (únicos) tais que
u = u1e1 + u2e2 + · · ·+ ukek.
Os escalares u1,u2, . . .uk chamam-se, respectivamente, primeira, se-gunda, . . . ,k−ésima coordenada do vetor u em relação à base E. Asequência formada por essas coordenadas de�nem, portanto, um vetor(u1,u2, . . .uk) ∈ IRk.
21
(x)E = (x1, x2, . . . , xn)
é chamada de sequência de coordenadas ( ou simplesmente coordenadas)do vetor x em relação à base E. Para podermos operar de forma e�caz commatrizes é conveniente interpretarmos a n-úpla
(x)E = (x1, x2, . . . , xn)
como uma matriz linha e sua transposta
(x)tE = [x]E =
x1x2...xn
Que indicaremos sempre por [x]E, como uma matriz coluna.
4.1.1 Exercícios
1. Seja E uma base de um espaço vetorial V e x,y dois vetores quaisquerde V. Mostre que:
(x+ y)E = (x)E + (y)E
2. Seja E uma base de um espaço vetorial V, x um vetor de V e λ ∈ IR.Mostre que:
(λx)E = λ(x)E
3. Seja E uma base de um espaço vetorial V e u1,u2, . . . ,un uma sequên-cia de vetores de V. Mostre que as a�rmações abaixo são equivalentes:
(a) A sequência u1,u2, . . . ,un de vetores de V é linearmente inde-pendente.
(b) A sequência (u1)E, (u2)E, . . . , (un)E de vetores de IRn é linear-mente independente.
22

5 Matriz de Transição Entre Duas Bases
Vimos acima que a escolha de uma base num espaço vetorial nos permiteassociarmos coordenadas aos vetores. Um problema de fundamental im-portância é estudar como mudam as coordenadas de um vetor quandomudamos a base em relação à qual esse vetor está representado. Vamosintroduzir um formalismo (cálculo matricial) que nos permite relacionar,com relativa facilidade, as coordenadas de um mesmo vetor em relação aduas bases diferentes.
Sejam então E = {e1, e2, . . . en} e F = {f1, f2, . . . fn} duas bases de ummesmo espaço vetorial. Vamos escrever os vetores da base F como combi-nação linear dos vetores da base E. Como sabemos, por ser E uma base,os coe�cientes dessas combinações lineares são únicos. Assim, podemosescrever:
f1 = a11e1 + a21e2 + · · ·+ an1enf2 = a12e1 + a22e2 + · · ·+ an2en...
...fn = a1ne1 + a2ne2 + · · ·+ annen
Amaneira mais natural de trabalharmos com esses coe�cientes é utilizan-do-os para formar uma matriz. Devido as propriedades da multiplicação dematrizes a maneira mais conveniente de fazer isso é construir uma matrizcujas colunas são os respectivos coe�cientes das linhas que representam ascombinações lineares acima. Dessa forma, temos a matriz
MFE =
a11 a12 · · · a1na21 a22 · · · a2n...
......
...an1 an2 · · · ann
Essa éumade�nição
importante!
que chamaremos de matriz de transição da base E para a base F
Observe que de acordo com a de�nição da matriz de transição, quandoa base F coincidir com a base E a matriz de transição é a matriz identidade.
A propriedade mais importante dessa matriz é expressa pela proposisão
23
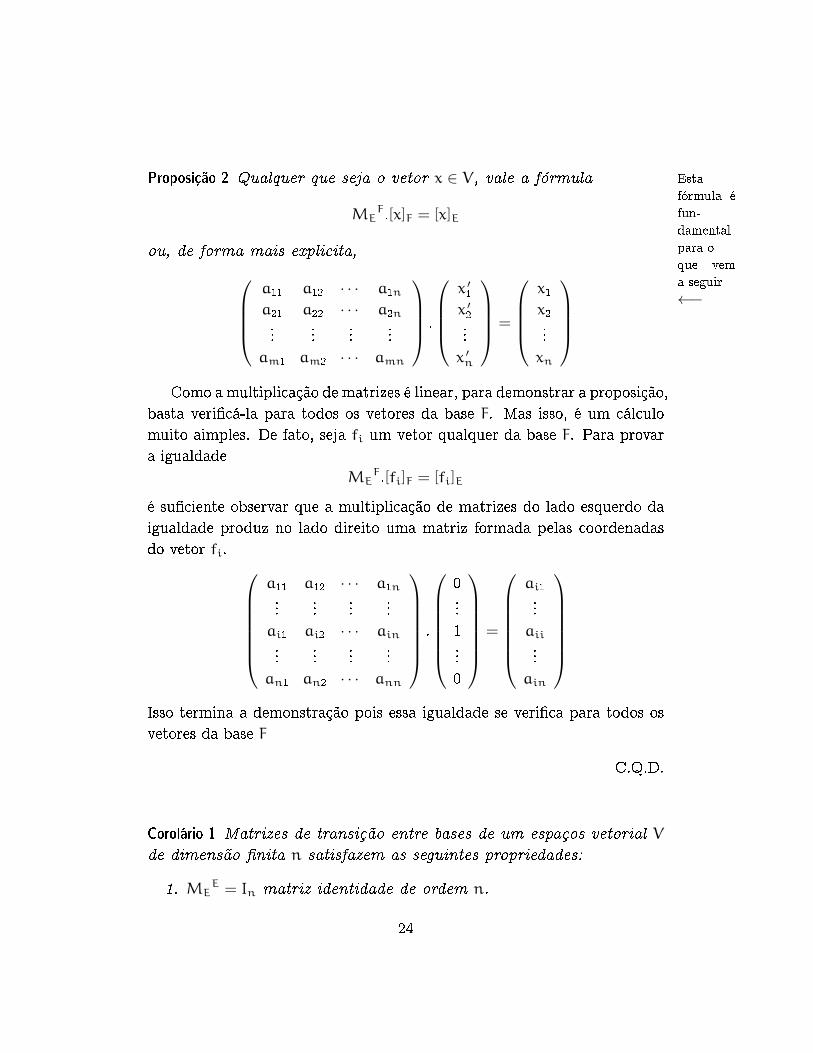
Proposição 2 Qualquer que seja o vetor x ∈ V, vale a fórmula Estafórmula éfun-damentalpara oque vema seguir←−
MEF.[x]F = [x]E
ou, de forma mais explicita,a11 a12 · · · a1na21 a22 · · · a2n...
......
...
am1 am2 · · · amn
.
x ′1
x ′2
...
x ′n
=
x1x2...
xn
Como a multiplicação de matrizes é linear, para demonstrar a proposição,
basta veri�cá-la para todos os vetores da base F. Mas isso, é um cálculomuito aimples. De fato, seja fi um vetor qualquer da base F. Para provara igualdade
MEF.[fi]F = [fi]E
é su�ciente observar que a multiplicação de matrizes do lado esquerdo daigualdade produz no lado direito uma matriz formada pelas coordenadasdo vetor fi.
a11 a12 · · · a1n...
......
...ai1 ai2 · · · ain
......
......
an1 an2 · · · ann
.
0...1...0
=
ai1
...aii
...ain
Isso termina a demonstração pois essa igualdade se veri�ca para todos osvetores da base F
C.Q.D.
Corolário 1 Matrizes de transição entre bases de um espaços vetorial V
de dimensão �nita n satisfazem as seguintes propriedades:
1. MEE = In matriz identidade de ordem n.
24

2. MGE =MG
F.MFE
3. (MFE) = (ME
F)−1
Demonstração.
1. A validade dessa fórmula já foi comentada na de�nição de matriz detransição dada acima.
2. A proposição 4.3 acima, nos permite escrever as fórmulas
[x]F =MFE[x]E MG
F[x]F = [x]G
Substituindo o valor de [x]F, dado pela primeira equação, na segunda,obtemos
MGF.(MF
E[x]E) =MGE[x]E
Pela associatividade da multiplicação de matrizes, podemos escrevera igualdade acima como
(MGF.MF
E)[x]E =MGE[x]E
Como essa igualdade vale para todos os vetores de V, em particularpara uma base de V, podemos concluir que
(MGF.MF
E) =MGE
o que demonstra a validade da equação.
3. Se �zermos G = E na equação
MGE =MG
F.MFE
do item 2, obtemos a equação
MEE =ME
F.MFE ou ainda In =ME
F.MFE
o que nos fornece a igualdade desejada
(MFE) = (ME
F)−1
É importante observar que essa equação mostra que a matriz de Não seesqueçadisso!
transicão de uma base para outra é sempre inversível.
25
5.1 Orientação de Espaços Vetoriais
Nesta secção todos os espaços vetoriais considerados terão como escalares Atenção→corpos ordenados.
6 Apêndice
6.1 Números naturais e Números inteiros
6.2 Polinômios
1. Seja p ∈ IR[X], de grau > 1, e α ∈ IR. Prove que são equivalentes asa�rmações:
(a) α é raiz de de p, isto é, p(α) = 0.
(b) p(x) é divisível por (x − α), isto é, existe q(x) ∈ IR[X], tal quep(x) = (x− α)q(x)
Sugestão: Use o fato de que existe um algoritmo de divisão emIR[X]. Tente demonstrar esse fato diretamente, isto é, sem supora existência do algoritmo de divisão.
2. Prove que se p é um polinômio de grau n, n > 0, então n tem, nomáximo, n raizes.
6.3 Matrizes
7 Transformações Lineares
8 Outros Exemplos de Espaços Vetoriais
1. Somas Diretas
2. Espaços Quocientes
3. Produto Tensorial
26
4. Produto Exterior
5. Produto Simétrico
27