Embed Size (px)
Citation preview
Tema 2.3 Ruido en los Tema 2.3 Ruido en los Sistemas DigitalesSistemas Digitales
Módulo II Ingeniería de Módulo II Ingeniería de Sistemas DigitalesSistemas Digitales
Tema 2.1 IntroducciónTema 2.1 IntroducciónTema 2.2 AlimentaciónTema 2.2 AlimentaciónTema 2.3 RuidoTema 2.3 RuidoTema 2.4. Señalización.Tema 2.4. Señalización.Tema 2.5 TemporizaciónTema 2.5 TemporizaciónTema 2.6 SincronizaciónTema 2.6 SincronizaciónTema 2.7 Diseño AsíncronoTema 2.7 Diseño Asíncrono
2.3 Ruido en los Sistemas 2.3 Ruido en los Sistemas DigitalesDigitales
3.1 Introducci3.1 Introduccióón. Fuentes de ruidon. Fuentes de ruido3.2 Ruido en la l3.2 Ruido en la líínea de alimentacinea de alimentacióónn–– Ruido simpleRuido simple–– Ruido diferencialRuido diferencial
3.3 Cross3.3 Cross-- talktalk–– CapacitivoCapacitivo–– Capacitivo e inductivoCapacitivo e inductivo–– Por la lPor la líínea de retornonea de retorno–– En la fuenteEn la fuente
3.4 Interferencias de se3.4 Interferencias de seññalesales
3.1 Introducción. Fuentes de 3.1 Introducción. Fuentes de ruidoruido
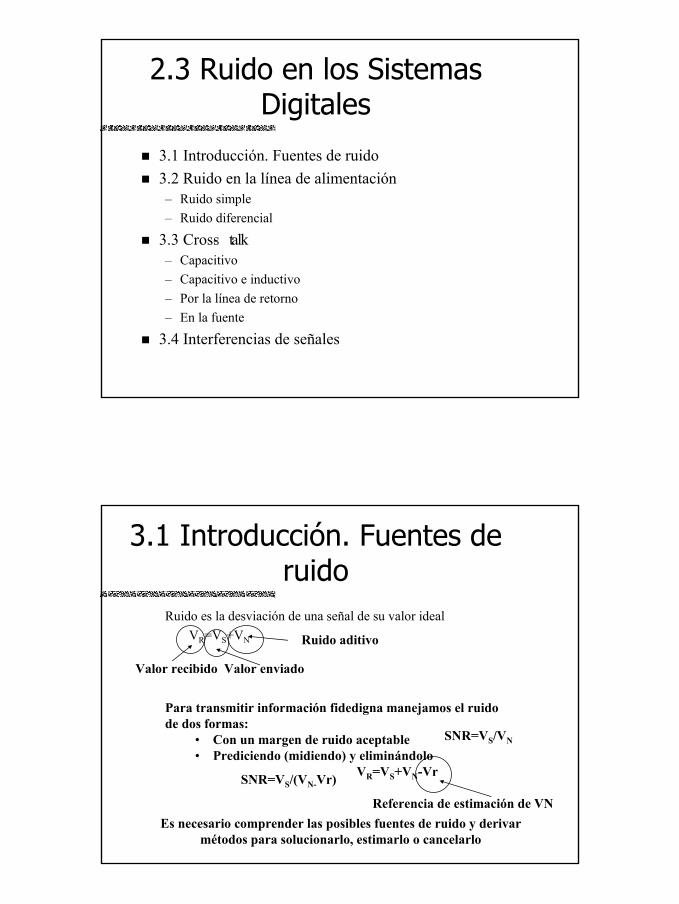
Ruido es la desviación de una señal de su valor idealRuido es la desviación de una señal de su valor idealVVRR=V=VSS+V+VNN
Para transmitir información fidedigna manejamos el ruido de dos formas:
• Con un margen de ruido aceptable • Prediciendo (midiendo) y eliminándolo
VR=VS+VN-Vr
SNR=VS/VN
SNR=VS/(VN-Vr)
Es necesario comprender las posibles fuentes de ruido y derivar métodos para solucionarlo, estimarlo o cancelarlo
Valor enviadoValor recibido
Ruido aditivo
Referencia de estimación de VN
3.1 Introducción. Fuentes de 3.1 Introducción. Fuentes de ruidoruido
La mayor parte de las fuentes de ruido de los Sistemas Digitalesestán creadas por el propio sistema:
• Componentes parásitas• Acoplamiento• Uso de líneas de retorno comunes• Variación de parámetros de dispositivos
VN=KNVS+VNI
Cross talkInterferencias
Fuentes
OffsetRuido independiente de la
alimentación
3.1 Introducción. Fuentes de 3.1 Introducción. Fuentes de ruidoruido
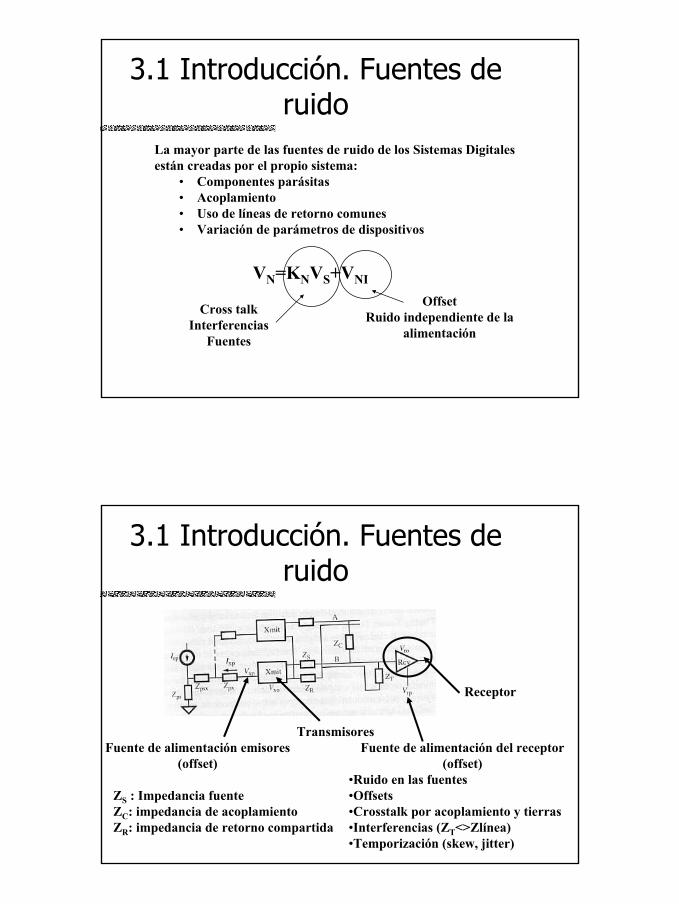
TransmisoresFuente de alimentación emisores
(offset)
ZS : Impedancia fuenteZC: impedancia de acoplamientoZR: impedancia de retorno compartida
Fuente de alimentación del receptor(offset)
•Ruido en las fuentes•Offsets•Crosstalk por acoplamiento y tierras•Interferencias (ZT<>Zlínea)•Temporización (skew, jitter)
Receptor
2.3 Ruido en los Sistemas 2.3 Ruido en los Sistemas DigitalesDigitales
3.1 Introducci3.1 Introduccióón. Fuentes de ruidon. Fuentes de ruido3.2 Ruido en la l3.2 Ruido en la líínea de alimentacinea de alimentacióónn–– Ruido simpleRuido simple–– Ruido diferencialRuido diferencial
3.3 Cross3.3 Cross-- talktalk–– CapacitivoCapacitivo–– Capacitivo e inductivoCapacitivo e inductivo–– Por la lPor la líínea de retornonea de retorno–– En la fuenteEn la fuente
3.4 Interferencias de se3.4 Interferencias de seññalesales
3.2 Ruido en la línea de 3.2 Ruido en la línea de alimentaciónalimentación
Las caídas IZ de la red de distribución causan que el voltaje diferencial local entre Vcc y Gnd varíe en el tiempo y en el espacio Efectos:
• Caídas fuera del rango de operación de los dispositivos• Error en la transmisión de símbolos• Error de temporización: jitter y skew• Aumento de los trise
Soluciones: reducción y aislamiento mediante•Capacitores de paso•Reguladores•Limitadores•Utilización de distintas líneas de alimentación y retornos de señal
En este tema modelaremos el ruido de alimentación como una o más fuentes de voltaje independientes

3.2 Ruido en la línea de 3.2 Ruido en la línea de alimentaciónalimentación
Ruido de alimentación simple
Es la variación espacial del voltaje en una única línea (GND o VDD) entre dos puntos del sistema
VNjk=IikZik-IijZij
Este ruido depende djk
3.2 Ruido en la línea de 3.2 Ruido en la línea de alimentaciónalimentación
Bus local on-chip, 30µm 10Bus global on-chip, 1mm 50Bus global on-chip, 7mm 350Entre chips en una tarjeta PC 250Entre tarjetas de PC, 1m 500
Distancia VNij(mV)
Ldi/dt
El problema disminuye cuando se utiliza una referencia explícita o
señalización diferencial y en modo corriente

3.2 Ruido en la línea de 3.2 Ruido en la línea de alimentaciónalimentación
Ruido de alimentación diferencialEs la variación del voltaje entre las 2 líneas de alimentación (GND y VDD) en un mismo punto del sistema
VNi=-IGiZGi – IPi ZPi
Puede controlarse mediante• Impedancias reducidas• Capacitores de paso• Aislamiento• Regulación local
• Influye en el retardo.• Se debe diseñar el circuito para operar con el voltaje de alimentación local estimado para el peor caso Ej fuente 2.5v ±0.25
Diseñar el circuito 10% más rápido que para 2.5v
2.3 Ruido en los Sistemas 2.3 Ruido en los Sistemas DigitalesDigitales
3.1 Introducci3.1 Introduccióón. Fuentes de ruidon. Fuentes de ruido3.2 Ruido en la l3.2 Ruido en la líínea de alimentacinea de alimentacióónn–– Ruido simpleRuido simple–– Ruido diferencialRuido diferencial
3.3 Cross3.3 Cross-- talktalk–– CapacitivoCapacitivo–– Capacitivo e inductivoCapacitivo e inductivo–– Por la lPor la líínea de retornonea de retorno–– En la fuenteEn la fuente
3.4 Interferencias de se3.4 Interferencias de seññalesales
3.3 Cross3.3 Cross--talktalkEs el ruido inducido por una señal que interfiere con otra señal de otra línea. Podemos distinguir:
• Acoplamiento capacitivo• Por inducción mutua• A través de las líneas de retorno comunes
Es una fuente de ruido proporcionalSoluciones:
• Controlar geometría de las líneas• Organizar circuitos• Seleccionar sistemas de señalización
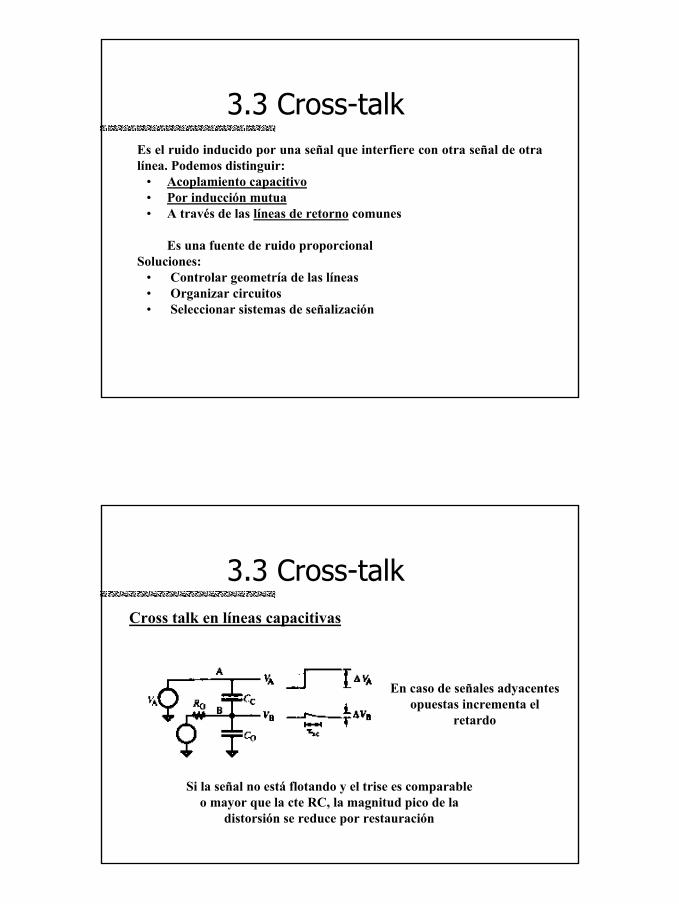
3.3 Cross3.3 Cross--talktalkCross talk en líneas capacitivas
Si la señal no está flotando y el trise es comparable o mayor que la cte RC, la magnitud pico de la
distorsión se reduce por restauración
En caso de señales adyacentes opuestas incrementa el
retardo
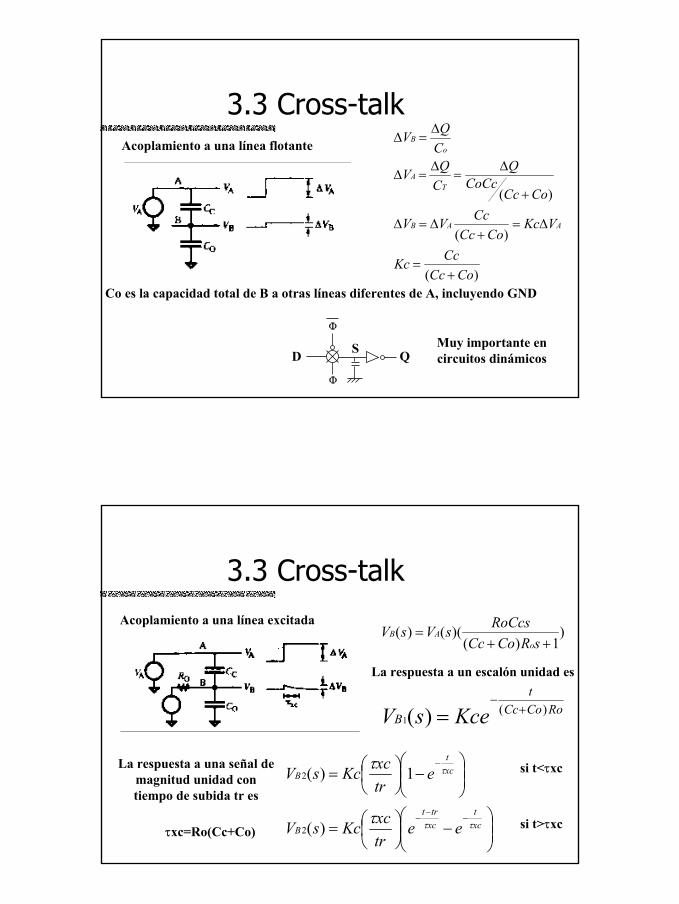
3.3 Cross3.3 Cross--talktalkAcoplamiento a una línea flotante
)(
)(
)(
CoCcCcKc
VKcCoCc
CcVV
CoCcCoCc
QCQV
CQV
AAB
TA
oB
+=
∆=+
∆=∆
+
∆=
∆=∆
∆=∆
Co es la capacidad total de B a otras líneas diferentes de A, incluyendo GND
Φ
Φ
D S QMuy importante en circuitos dinámicos
3.3 Cross3.3 Cross--talktalkAcoplamiento a una línea excitada
τxc=Ro(Cc+Co)
)1)(
)(()(++
=sRCoCc
RoCcssVsVo
AB
La respuesta a una señal de magnitud unidad con tiempo de subida tr es
RoCoCct
B KcesV )()(1+
−
=
La respuesta a un escalón unidad es
−
=
−
=
−−
−
−
xct
xctrt
B
xct
B
eetrxcKcsV
etrxcKcsV
ττ
τ
τ
τ
)(
1)(
2
2si t<τxc
si t>τxc
3.3 Cross3.3 Cross--talktalk
•El efecto fundamental del cross talk es el incremento del retardo. • Si dos líneas A y B conmutan simultáneamente en direcciones opuestas, el cross talk incrementa el retardo porque hay que transmitir el doble de carga 2∆Vcc*Cc a Cc.• Es como si Cc tuviera tamaño doble
•Con las tecnologías actuales el efecto del cross talk es significativo, sobre todo en las señales que se rutan en layers de señalización intermedios, donde la mayor parte de la capacidad es a otras líneas.
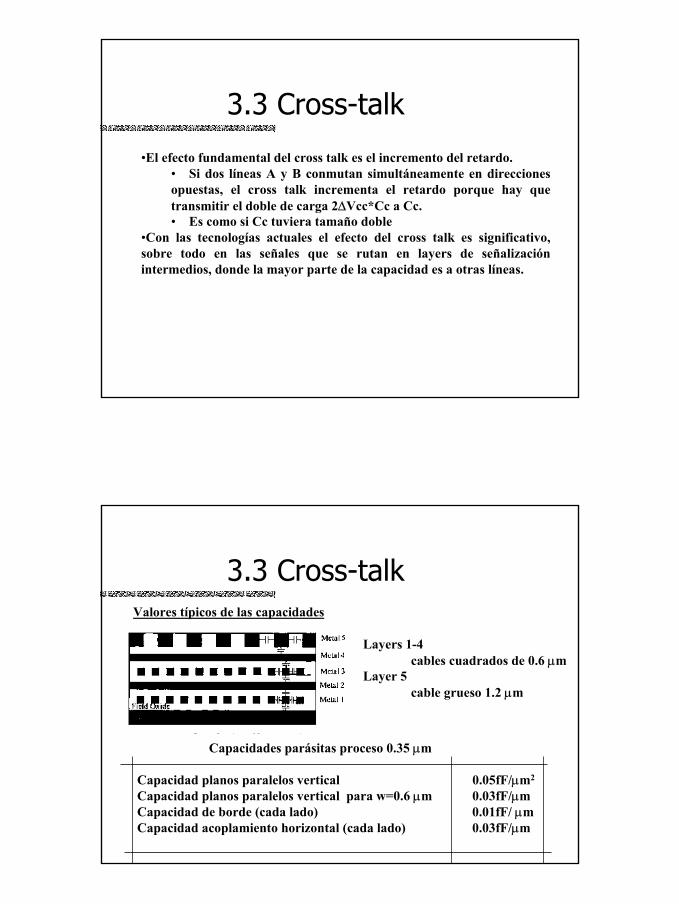
3.3 Cross3.3 Cross--talktalkValores típicos de las capacidadesValores típicos de las capacidades
Capacidad planos paralelos vertical 0.05fF/µm2
Capacidad planos paralelos vertical para w=0.6 µm 0.03fF/µmCapacidad de borde (cada lado) 0.01fF/ µmCapacidad acoplamiento horizontal (cada lado) 0.03fF/µm
Layers 1-4 cables cuadrados de 0.6 µm
Layer 5cable grueso 1.2 µm
Capacidades parásitas proceso 0.35 µm

3.3 Cross3.3 Cross--talktalk
•Para la tecnología anterior el coeficiente de acoplamiento capacitivo a las señales del mismo layer es
19.013030
30)(
≅+
=+
=CoCc
CcKc
En el peor caso, las 2 señales conmutan simultáneamente y el acoplamiento puede ser del 38%
3.3 Cross3.3 Cross--talktalkPosibles soluciones al cross talk capacitivo
1.- Cumplir con rigidez las reglas de rutado de líneas de retorno.
2.- Evitar las señales flotantes.
3.- Incrementar el trise
4.- Las señales que se envían en modo diferencial deben rutarse adyacentes e intercambiar sus posiciones periódicamente
5.- Las señales muy sensibles deben rutarse muy separadas de las que tienen un rango amplio de variación
6.- Señales DC muy sensibles deben tener capacidad a la fuente apropiada

2.3 Ruido en los Sistemas 2.3 Ruido en los Sistemas DigitalesDigitales
3.1 Introducci3.1 Introduccióón. Fuentes de ruidon. Fuentes de ruido3.2 Ruido en la l3.2 Ruido en la líínea de alimentacinea de alimentacióónn–– Ruido simpleRuido simple–– Ruido diferencialRuido diferencial
3.3 Cross3.3 Cross-- talktalk–– CapacitivoCapacitivo–– Capacitivo e inductivoCapacitivo e inductivo–– Por la lPor la líínea de retornonea de retorno–– En la fuenteEn la fuente
3.4 Interferencias de se3.4 Interferencias de seññalesales
3.3 Cross3.3 Cross--talktalkCross talk en líneas de transmisión (capacitivo e inductivo)
Una transición en una LT puede inducir ondas viajeras en las LT cercanas debido a las capacidades parásitas y a la inductancia mutua entre las líneas
dtdVKcx
dtdV AB
=
dxdVxK
dxdV A
LB=

3.3 Cross3.3 Cross--talktalkAcoplamiento capacitivo: debido a Cc
dttxdVKcx
dttxdV AB ),(),(= )( CsCc
CcKcx+
=
Acoplamiento inductivo: debido a M y L
LdxtxdV
dttxdI AA ),(),(
−=
dttxdIM
dxtxdV AB ),(),(
−=
dxtxdVK
dxtxdV
LM
dxtxdV A
LXAB ),(),(),(
==LMxKL =
3.3 Cross3.3 Cross--talktalk
dxtxdVv
dttxdV ff ),(),(
−=
Teniendo en cuenta que las ondas viajeras inversa y directa cumplen:
dxtxdVv
dttxdV rr ),(),(=
dxtxdVK
dxtxdV A
LXB ),(),(
=
Esto genera una onda viajera directa negativa y una onda viajerainversa positivaEn medios homogéneos Kcx=KLX y las ondas viajeras directas de acoplamiento inductivo y capacitivo se cancelan.
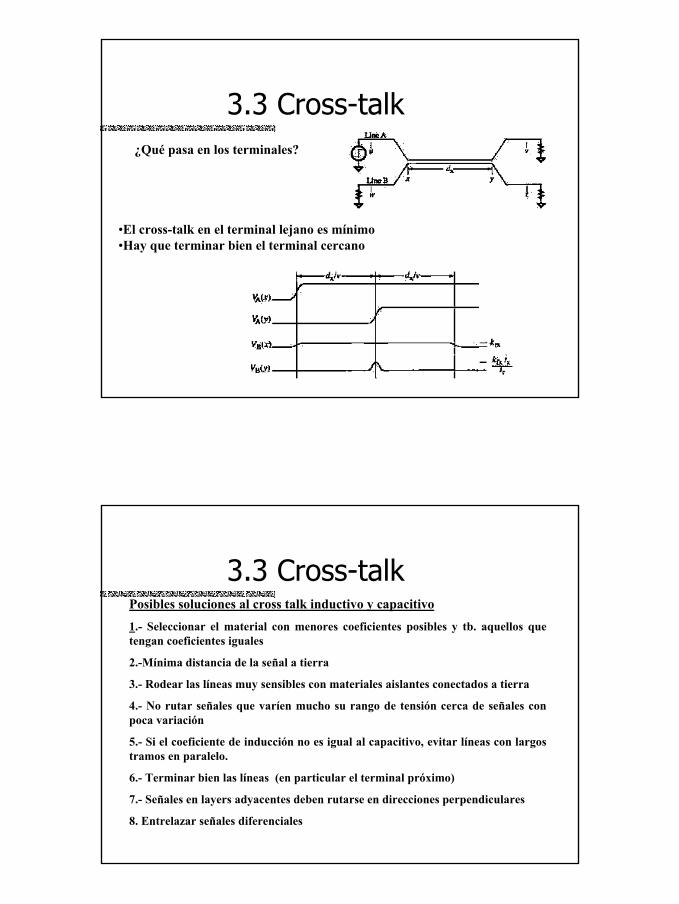
3.3 Cross3.3 Cross--talktalk¿Qué pasa en los terminales?
•El cross-talk en el terminal lejano es mínimo•Hay que terminar bien el terminal cercano
3.3 Cross3.3 Cross--talktalkPosibles soluciones al cross talk inductivo y capacitivo
1.- Seleccionar el material con menores coeficientes posibles y tb. aquellos que tengan coeficientes iguales
2.-Mínima distancia de la señal a tierra
3.- Rodear las líneas muy sensibles con materiales aislantes conectados a tierra
4.- No rutar señales que varíen mucho su rango de tensión cerca de señales con poca variación
5.- Si el coeficiente de inducción no es igual al capacitivo, evitar líneas con largos tramos en paralelo.
6.- Terminar bien las líneas (en particular el terminal próximo)
7.- Señales en layers adyacentes deben rutarse en direcciones perpendiculares
8. Entrelazar señales diferenciales
2.3 Ruido en los Sistemas 2.3 Ruido en los Sistemas DigitalesDigitales
3.1 Introducci3.1 Introduccióón. Fuentes de ruidon. Fuentes de ruido3.2 Ruido en la l3.2 Ruido en la líínea de alimentacinea de alimentacióónn–– Ruido simpleRuido simple–– Ruido diferencialRuido diferencial
3.3 Cross3.3 Cross-- talktalk–– CapacitivoCapacitivo–– Capacitivo e inductivoCapacitivo e inductivo–– Por la lPor la líínea de retornonea de retorno–– En la fuenteEn la fuente
3.4 Interferencias de se3.4 Interferencias de seññalesales
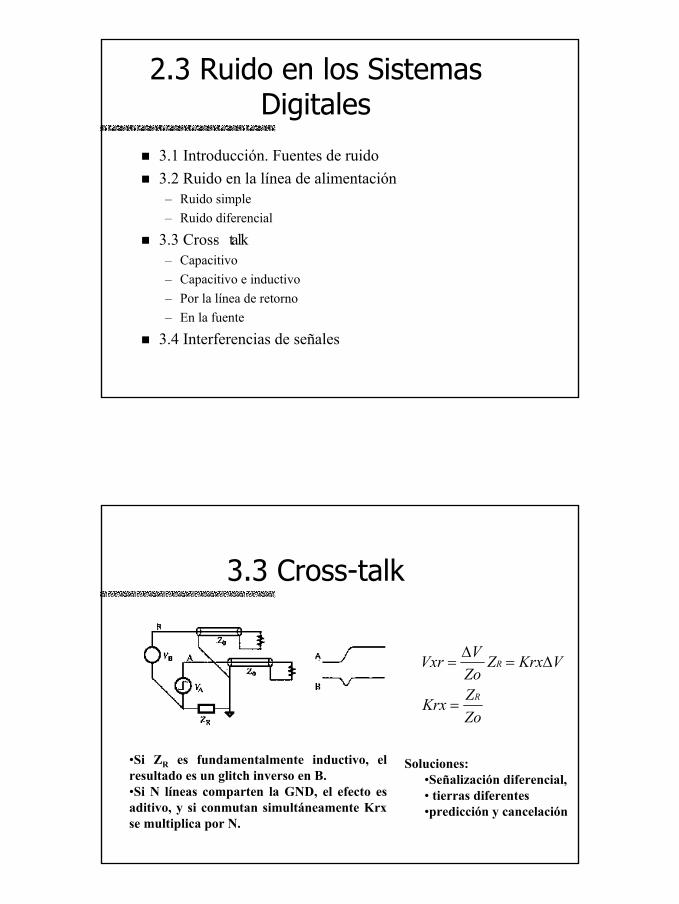
3.3 Cross3.3 Cross--talktalk
•Si ZR es fundamentalmente inductivo, el resultado es un glitch inverso en B.•Si N líneas comparten la GND, el efecto es aditivo, y si conmutan simultáneamente Krxse multiplica por N.
ZoZKrx
VKrxZZoVVxr
R
R
=
∆=∆
=
Soluciones: •Señalización diferencial,• tierras diferentes•predicción y cancelación

2.3 Ruido en los Sistemas 2.3 Ruido en los Sistemas DigitalesDigitales
3.1 Introducci3.1 Introduccióón. Fuentes de ruidon. Fuentes de ruido3.2 Ruido en la l3.2 Ruido en la líínea de alimentacinea de alimentacióónn–– Ruido simpleRuido simple–– Ruido diferencialRuido diferencial
3.3 Cross3.3 Cross-- talktalk–– CapacitivoCapacitivo–– Capacitivo e inductivoCapacitivo e inductivo–– Por la lPor la líínea de retornonea de retorno–– En la fuenteEn la fuente
3.4 Interferencias de se3.4 Interferencias de seññalesales
3.3 Cross3.3 Cross--talktalk
También puede existir cross-talk en la otra línea de alimentación.
2.3 Ruido en los Sistemas 2.3 Ruido en los Sistemas DigitalesDigitales
3.1 Introducci3.1 Introduccióón. Fuentes de ruidon. Fuentes de ruido3.2 Ruido en la l3.2 Ruido en la líínea de alimentacinea de alimentacióónn–– Ruido simpleRuido simple–– Ruido diferencialRuido diferencial
3.3 Cross3.3 Cross-- talktalk–– CapacitivoCapacitivo–– Capacitivo e inductivoCapacitivo e inductivo–– Por la lPor la líínea de retornonea de retorno–– En la fuenteEn la fuente
3.4 Interferencias de se3.4 Interferencias de seññalesales
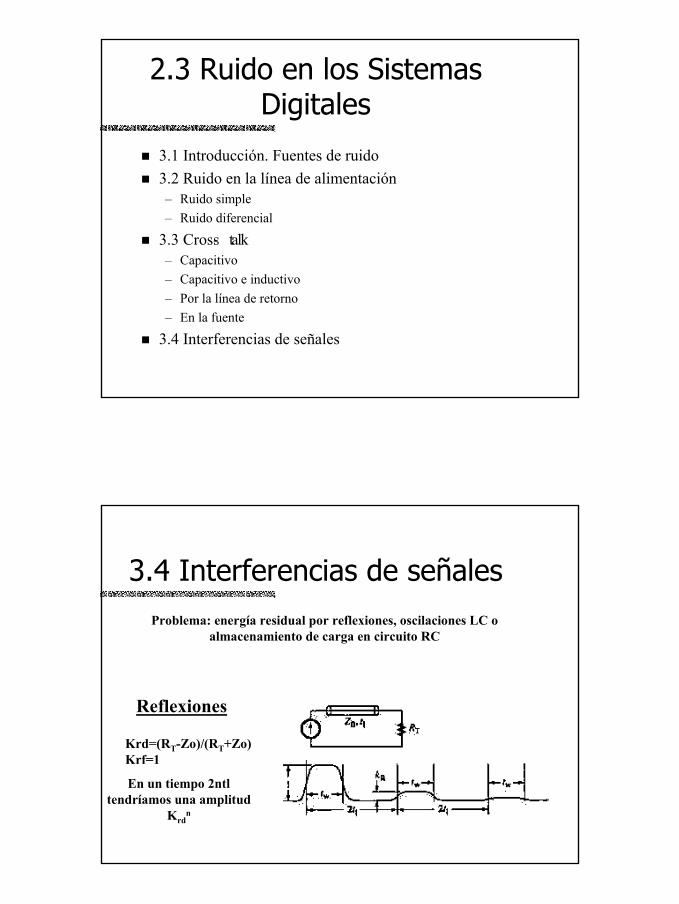
3.4 Interferencias de señales3.4 Interferencias de señalesProblema: energía residual por reflexiones, oscilaciones LC o
almacenamiento de carga en circuito RC
ReflexionesReflexiones
Krd=(RT-Zo)/(RT+Zo)Krf=1
En un tiempo 2ntl tendríamos una amplitud
Krdn
3.4 Interferencias de señales3.4 Interferencias de señales
εε
εεε
+=
++−+
=
+=
2)1()1()1(
00
00
0
ZZZZK
ZR
R
TPara pequeños desajustes
2ε
≅RK
•En el peor de los casos, la suma coherente de todas las reflexiones de símbolos anteriores es
R
RRiR
KK
iiKK
−=∑
∞≅
1Si KR<<1, sólo la primera reflexión es relevante
Si se conoce, puede eliminarse por cancelación
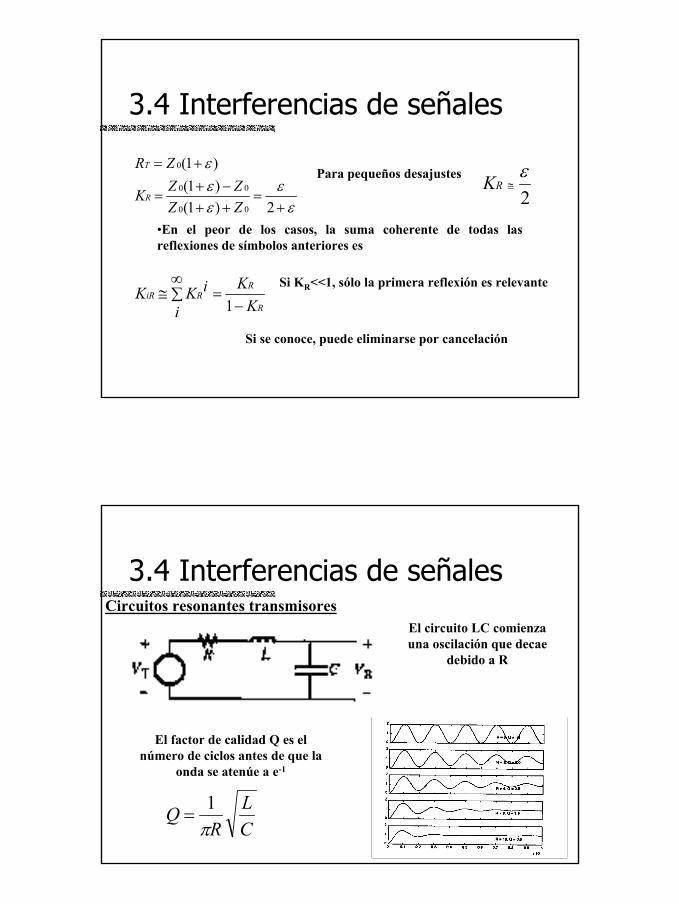
3.4 Interferencias de señales3.4 Interferencias de señalesCircuitos resonantes transmisoresCircuitos resonantes transmisores
El circuito LC comienza una oscilación que decae
debido a R
El factor de calidad Q es el número de ciclos antes de que la
onda se atenúe a e-1
CL
RQ
π1
=
3.4 Interferencias de señales3.4 Interferencias de señalesEl coeficiente de amortiguamiento viene dado por
LtbR
eKx 2−
=
KxKx
iiKxKix
−=∑
∞≅
1
tb tiempo entre 2 transmisiones de datos consecutivas
En el peor caso, la suma coherente de todas las oscilaciones de símbolos anteriores sería:
Para controlar este ruido existen varias posibilidades:• Utilizar modo corriente• Controlar trise• Reducir el rango de tensiones
En general aumenta el tiempo requerido para
enviar un bit
3.4 Interferencias de señales3.4 Interferencias de señalesRetardo inercial y estado oculto:Si un nodo interno de un circuito lógico no llega al estado estacionario al final de cada ciclo, el valor y temporización de las salidas subsecuentes del circuito dependerán del estado residualestado residual y por tanto de la historiahistoria
Este fenómeno puede causar:1. pérdida de datos aislados 2. jitter
Retardo inercial tiRetardo inercial ti: es el tiempo para que un nodo llegue al estado estacionario (margen del 10%)

3.4 Interferencias de señales3.4 Interferencias de señales
retardo inercial del inversor IB ≅2ns
•Una cadena de 1´s o 0´s lleva a B a los rangos extremos•1´s y 0´s alternados lleva a B a un voltaje intermedio
La respuesta en C depende de la historia en A
Pulsos mínimos: pueden perderseA 1 0 1 1 1 111 1 10 0 0 00 0 0 00
No se llega al estado estacionario
3.4 Interferencias de señales3.4 Interferencias de señalesSoluciones:
1. Ajustar el tamaño del segundo inversor2. Limitar la variación máxima en B
• A través de una resistencia conectar B a Vref• Con realimentación
se desplaza el problema al nodo A
La resistencia de 20K se implementa con una puerta de paso siempre
activa
Desde que A conmuta h. que B conmuta, el resistor drena en la misma dirección que IB
Otras fuentes de ruidoOtras fuentes de ruidoInterferencia electromagnéticaInterferencia electromagnética:
•Campo eléctrico: proporcional a la distancia entre GND y Vdd•Flujo magnético: proporcional al área del lazo entre GND y Vdd
Solución: disminuir distancia entre GND y VDD
Variación de los parámetrosVariación de los parámetros (offsets)
Ruido Ruido JohnsonJohnson o termalo termal: la potencia disipada a través de un elemento resistivo genera calor
Ruido de lanzamientoRuido de lanzamiento: por la cuantización de la corriente
Oscilación o ruido 1/fOscilación o ruido 1/f: fluctuación en los parámetros de un dispositivo
Partículas alfaPartículas alfa: deterioro radioactivoSolución proteger los circuitos
Negligibles





























