Embed Size (px)
Citation preview

1
1
MESTRADO INTEGRADO EM ENGENHARIA de MECÂNICA
Lisboa-Portugal
INSTITUTO SUPERIOR TÉCNICOENFORMAÇÃO PLÁSTICA
2
Apresentação
Corpo docenteBárbara Gouveia (Profª Auxiliar)Jorge Rodrigues (Prof. Associado) - ResponsávelBeatriz Silva (Assistente)
Programa da disciplina
MLE - Método das linhas de escorregamento (4 semanas)
MLS - Método do limite superior (3 semanas)Processos tecnológicos de deformação plástica na massa (aulas práticas (MLE e MLS)):
ExtrusãoTrefilagem
Teoria da flexão em domínio plásticoProcessos de deformação plástica de chapa:
QuinagemCalandragemEstampagem de formas complexas
Avaliação2 testes (27 Outubro e 6 de Janeiro) ou exame60% exame (nota mínima 8,5 val.) + 25% trabalho + 15% lab.3 laboratórios1 trabalho (enunciados a distribuir; entrega do trabalho até 12 de Dezembro)
Contactos
Secção de Tecnologia Mecânica, Edifício Ciência, Piso 0
Telf. 21 8417483
3
Apresentação
Bibliografia
Rodrigues J. e Martins P., Tecnologia mecânica vol. 1 e vol. 2, Escolar Editora, 2005.
Rodrigues J. e Martins P., Tecnologia mecânica vol. 1 e vol. 2, Enunciados de Exercícios Complementares, 2005.
(download na página da disciplina no FÉNIX)
4
Método das linhas de escorregamento
IntroduçãoO método das linhas de escorregamento tem como objectivo principal descrever adeformação plástica de sólidos sujeitos a solicitações impostas, por exemplo, através dasferramentas. As soluções encontradas através da aplicação deste método são soluçõescompletas, na medida em que resolvem simultaneamente os campos de tensões e dedeformações (velocidades).
Hipóteses simplificativas:
• O material é considerado homogéneo e isotrópico.
• O material tem um comportamento mecânico do tipo rígido-perfeitamente plástico, desprezando-se todos os efeitos que possam advir da componente elástica da deformação e considera-se que não existem (ou que não são significativos) os fenómenos de encruamento
• A generalidade das aplicações do método das linhas de escorregamento refere-se à solução de problemas em condições de deformação plástica plana
• Desprezam-se os eventuais efeitos que possam decorrer da temperatura, da velocidade de deformação e do tempo associados à deformação plástica dos materiais

2
5
Método das linhas de escorregamento
Introdução
A condição de deformação plana segundo a qual todos os deslocamentos resultantes das solicitações impostas ocorrem em planos paralelos entre si, ou seja, em planos paralelos aoplano xy, é entendida como uma hipótese simplificativa, pois, nestas condições, as tensões, as extensões e as velocidades de deformação serão sempre independentes da direcção z
Compressão entre pratos de menor dimensão do que a peça
Laminagem de chapa Corte por arranque de apara
6
Método das linhas de escorregamento
IntroduçãoO valor da tensão segundo a direcção z pode ser determinado através das equações constitutivas rígido-viscoplásticas de Levy-Mises:
( )[ ]
( )[ ]
( )[ ]
xy
p
xy
yxz
p
z
xzy
p
y
zyx
p
x
τσε
=γ
σ+σ−σσε
=ε
σ+σ−σσε
=ε
σ+σ−σσε
=ε
&&
&&
&&
&&
23
21
21
21
Impondo a condição de deformação plana, , obtém-se:0=εz&
( )yxz σ+σ=σ=σ 21
2
ou seja, a tensão média é igual à tensão principal intermédia σ σ σm z= = 2
7
Método das linhas de escorregamento
IntroduçãoConsidere-se um elemento de volume arbitrário sujeito a um estado de tensão com as três tensões normais, segundo os eixos x, y e z de compressão, com , em condições de deformação plana:
É possível concluir que:• Existem dois planos ortogonais entre si onde as tensões de corte são máximas e
iguais à tensão limite de elasticidade em corte puro, k.• Estes planos estão sujeitos a tensões normais iguais entre si, , estando
igualmente sujeitos a distorções máximas
σ3
τ xy
τ yx
σy
σ1
ε
k
σ=σz 2
σx
τ
σO
y
x
xy
x
yx
1
x
=z 2
O
3
y
y
.ε.
.ε
ε.ε. ε.
ε.
ε.ε.
= 0
γ/2.
z
y
x
σy
σx
σz = σ2
τ yx
τ xy
yx σ<σ
mσ=σ2
8
Método das linhas de escorregamentoCampo de linhas de escorregamentoAo conjunto de quadrículas (ou rede) definidas através das direcções dos planos de corte máximo denomina-se campo de linhas de escorregamento. Estas direcções são, no caso geral, compostas por linhas curvas ortogonais entre si (embora possam igualmente coexistir linhas rectas no seio de um campo de linhas de escorregamento)
mσ=σ2
β I
P (2,II)
yβ II
βIII
α2
x
α3
α1
• Ao longo das linhas de escorregamento actuam as tensões de corte máximas;
• Na direcção perpendicular actuam as tensões normais médias ;
Px
y
α
φ
k
k
k
k
σm
mσ
mσ
σm
β Dir. principal 3
Dir. principal 1
φ
Convenção:
• Às linhas de escorregamento da família αestão associadas tensões de corte máximas que provocam distorções no sentido horário;
• Às linhas de escorregamento da família βestão associadas tensões de corte máximas que provocam distorções no sentido anti-horário;

3
9
β I
P (2,II)
yβ II
βIII
α2
x
α3
α1
Método das linhas de escorregamentoCampo de linhas de escorregamentoConsidere-se um elemento de volume curvilíneo orientado segundo as direcções das linhas de escorregamento:• O elemento de área curvilíneo que passa pelo ponto P encontra-se rodado de um ângulo φ relativamente ao eixo dos x e de um ângulo de 45º relativamente às direcções principais;
• A construção do campo de tensõesassenta no deslocamento fictício do ponto P ao longo dos nós da rede;
• O deslocamento do ponto P permite determinar a variação da tensão média e portanto a variação do círculorepresentativo das tensões no plano de Möhr;
10
Método das linhas de escorregamentoCampo de linhas de escorregamento - convenções• As linhas de escorregamento da família α - tensões de corte máximas que provocam distorções no sentido horário representação das linhas α no plano de Mohr é feita na zona positiva do eixo dos τ (τ =+k );
•As linhas de escorregamento da família β - tensões de corte máximas que provocam distorções no sentido anti-horário representação das linhas β no plano de Mohr é feita na zona negativa do eixo dos τ (τ =-k );
•O sentido positivo das linhas α é aquele que coincide com o sentido positivo das linhas β, quando a linha αrodar de um ângulo igual a 90º no sentido anti-horário;
• O ângulo da tangente à linha de escorregamento, φ, num ponto genérico é sempre igual para a linha α e β;
• A variação do ângulo de rotação, dφ, entre dois pontos genéricos situados sobre a mesma linha, serápositiva, quando ao se avançar no sentido positivo da linha, a respectiva tangente à linha for rodando no sentido anti-horário;
11
• Critério de plasticidade:
, para o critério de Tresca
, para o critério de von Mises
Método das linhas de escorregamentoCampo de tensões – Equações de HenckyA caracterização do campo de tensões para as zonas em deformação plástica em condição de deformação plana, envolve as seguintes equações válidas nessas regiões:
• Equações de equilíbrio de tensões:
∂σ∂
∂τ
∂∂τ
∂
∂σ
∂
x yx
xy y
x y
x y
+ =
+ =
0
0
( )σ σ τx y xy k− + =2 2 24 4
k e=σ2
3ek σ
=
Admitindo que o material tem um comportamento rígido-perfeitamente plástico, k, tem um valor constante ao longo das regiões em regime plástico
σ σ φσ σ φ
τ φ
x m
y m
xy
kk
k
= −= +
=
sinsin
cos
22
2
As equações de equilíbrio das tensões podem ser modificadas aplicando uma transformação de coordenadas proposta por Levy:
Nota: P/ reduzir o número de incógnitas de 3 (σx, σy, τxy) para 2 (σm, φ)! 12
Método das linhas de escorregamentoCampo de tensões – Equações de HenckyAs equações de equilíbrio de tensões podem ser rescritas na forma de um sistema de equações diferenciais parciais lineares de 1ª ordem em e :
As equações diferenciais podem ser aplicadas a qualquer sistema de eixos arbitrários x’y’tangente às linhas de escorregamento α e β num ponto genérico P situado sobre a quadrícula. Nestas condições φ =0 e as equações ficam reduzidas a funções de uma variável (α ou β) e as derivadas parciais podem ser substituídas por derivadas totais:
σm x y( , ) ),( yxφ
∂σ∂
φ∂φ∂
φ∂φ∂
∂σ∂
φ∂φ∂
φ∂φ∂
m
m
xk
xk
y
yk
yk
x
− − =
+ − =
2 2 2 2 0
2 2 2 2 0
cos sin
cos sin
dd
kdd
dd
kdd
m
m
σα
φα
σβ
φβ
− =
+ =
2 0
2 0
A integração destas equações dá origem às equações de Hencky que constituem a base para a resolução do campo de tensões pelo método das linhas de escorregamento:
β=φ+σ
α=φ−σ
β
α
linhas das longo ao2
linhas das longo ao2te
m
tem
Ck
Ck

4
13
Método das linhas de escorregamentoCampo de tensões – Equações de Hencky
Estas equações determinam que o campo de tensões irá variar ao longo das linhas de escorregamento α e β:
A tensão média varia ao longo das linhas de escorregamento de uma quantidade igual a 2k vezes a variação angular!!
β=φ+σ
α=φ−σ
β
α
linhas das longo ao2
linhas das longo ao2te
m
tem
Ck
Ck
βφ−=σ⇔=φ+σ
αφ=σ⇔=φ−σ
linhas das longo ao 2 0 2 linhas das longo ao 202
dkddkddkddkd
mm
mm
Este resultado expressa-se matematicamente através da forma diferencial das equações:
14
Método das linhas de escorregamentoEquações de Hencky - Significado geométricoA e B são dois pontos genéricos pertencentes a uma linha α traçada no plano físico.
Conhecido o estado de tensão no ponto A ⇒ Determina-se pólo de A (PA) no plano de Mohr
Caminhando ao longo da linha α entre os pontos A e B:
Plano físico
Plano das tensões
• A variação da tensão média, dσm=2kdφ (eq. de Hencky)• O deslocamento do círculo de Mohr no plano das tensões é
igual a 2kdφ
Consequências:
• Ao percorrer no plano físico uma linha α, o círculo de Mohr, no plano das tensões, desloca-se como se rolasse sem escorregar sobre a linha I, de um ângulo igual a dφ(ângulo ao centro 2dφ), deslocando-se o pólo sobre a circunferência de uma quantidade igual a 2kdφ, como se estivesse fixo sobre a circunferência enquanto esta roda
• Quando se vai de A para B no plano físico, o pólo descreve uma curva ciclóide no plano das tensões, denominada por ciclóide dos pólos, que tem a particularidade de ser normal à linha que une o pólo ao ponto de tangencia do círculo com a linha I
15
Método das linhas de escorregamentoEquações de Hencky – Ciclóide dos pólosA figura apresenta a forma geral da curva ciclóide dos pólos para uma linha α no plano das tensões:
Ciclóide dos pólos para uma linha α
As suas coordenadas de cada ponto são dadas em função da variação do ângulo ao centro, ∆φ:
em que ∆φ é o ângulo de rotação do círculo, considerado positivo quando a rotação for anti-horária.
φ∆=τφ∆−φ∆=σ
cos) sin2(
kk
A ciclóide representa o lugar geométrico dos pólos, resultante do círculo de Mohr rolar sem escorregar sobre a linha I
16
A diferença entre os valores da tensão média nos pontos A e C:
Ou, fazendo o trajecto pelo lado oposto:
Método das linhas de escorregamentoPropriedades geométricas dos campos de linhas de escorregamento1º Teorema de Hencky:
Para que um campo de linhas de escorregamento seja estaticamente admissível tem que verificar as equações de Hencky, as quais, por seu lado, impõem restrições à sua forma geométrica.
Considere a região ABCD, delimitada por duas linhas α, AB e DC e por duas linhas β, AD e BC.
)2(2)(2)(2)()(
ACB
ABBC
mAmBmBmCmAmC
kkk
φ−φ−φ=
=φ−φ+φ−φ−=
=σ−σ+σ−σ=σ−σ
)2(2)(2)(2
)()(
ACD
ADDC
mAmDmDmCmAmC
kkkφ+φ+φ−=
=φ−φ−φ−φ=
=σ−σ+σ−σ=σ−σ
CDDCABBA dd φ=φ−φ=φ−φ=φ )()(
Poder-se-ia também demonstrar uma relação análoga para as linhas de escorregamento da outra família (β):
CBBCADDA dd φ=φ−φ=φ−φ=φ )()(
β=φ+σ
α=φ−σ
β
α
linhas ,2
linhas ,2te
m
tem
Ck
CkEquações de Hencky:

5
17
Método das linhas de escorregamentoPropriedades geométricas dos campos de linhas de escorregamento1º Teorema de Hencky:
CDDCABBA dd φ=φ−φ=φ−φ=φ )()(
CBBCADDA dd φ=φ−φ=φ−φ=φ )()(
Consequências:
• A diferença de valores da tensão média, dσm, entre dois pontos de duas linhas de uma família intersectadospor uma linha da outra família é constante. Ou seja, é apenas a variação angular e não o comprimento percorrido sobre a linha que determina a variação do campo de tensões.
• Uma linha de escorregamento recta, intersectada por duas linhas de escorregamento da outra família, determina que todos os segmentos da primeira família, cortados por linhas de escorregamento da segunda família, sejam rectos.
O ângulo entre as tangentes a duas linhas de uma família, nos pontos em que são intersectadas por uma linha da outra família, é constante e, consequentemente, também a diferença das tensões será constante.
18
Método das linhas de escorregamentoCondições de fronteira relativas ao campo de tensõesA resolução das equações diferenciais de Hencky relativas ao campo de tensões, exige que sejam introduzidas as condições de fronteira físicas do problema.
Condições de fronteira que surgem com maior frequência na resolução de problemas de linhas de escorregamento:
• Superfície livre – caracteriza-se pela inexistência de tensões normais ou tangenciais. Como consequência as linhas de escorregamento devem encontrar a superfície a 45º:
19
Método das linhas de escorregamentoCondições de fronteira relativas ao campo de tensões• Superfície sem atrito (entre o material e a ferramenta) – este tipo de fronteira não transmite tensões de corte, pelo que as linhas de escorregamento α e β deverão encontrar igualmente a superfície a 45º:
20
Método das linhas de escorregamentoCondições de fronteira relativas ao campo de tensões• Superfície com atrito máximo – caracteriza-se por a tensão de corte na interface ser máxima (k = τ) . Consequentemente, uma das linhas de escorregamento (dependendo do sentido da distorção provocada pelas tensões de corte) encontra a superfície tangencialmente, enquanto que a linha da outra família a vai intersectar ortogonalmente:

6
21
Método das linhas de escorregamentoCondições de fronteira relativas ao campo de tensões• Superfície com atrito de Coulomb (τ = µp) – uma das linhas de escorregamento (no caso α, por a distorção associada às tensões de corte ser horária) fará um ângulo θ com a superfície, enquanto que a outra linha (β) a vai intersectar com um ângulo de 90-θ:
22
Método das linhas de escorregamentoDescontinuidade de tensãoO conceito de descontinuidade de tensão, que por vezes tem que ser incluído na resolução de problemas de linhas de escorregamento.
Tanto a tensão normal, σn , que se exerce na direcção perpendicular à LDT, como a tensão de corte, τ , têm que ser iguais nos dois semi-planos, para que a continuidade física do material em deformação fique assegurada.
A descontinuidade de tensão existe somente entre as tensões σt e σt’ que actuam paralelamente à linha de descontinuidade de tensão.
No plano das tensões a descontinuidade de tensão corresponde a traçar dois círculos de raio k que se intersectam num ponto (σn, τ) . Fazendo passar por este ponto uma recta paralela à linha de descontinuidade de tensão, a intersecção com cada um dos círculos de Mohr, representativos do estado de tensão em cada um dos semi-planos, define os respectivos pólos PA e PB.
LDT – passa por um ponto genérico P e divide o plano
físico em dois semi-planos A e B
Se assim fosse essa linha seria uma linha de escorregamento e os pólos PA e PBestariam coincidentes, tal como os estados de tensão dos dois semi-planos (não havendo, portanto, descontinuidade).
NOTA: A tensão de corte não pode ser máxima numa LDT!!!
23
Método das linhas de escorregamentoDescontinuidade de tensão
Matematicamente, a explicação para a diferença entre as tensões σt e σt’:
Descontinuidade de tensão - diferença entre as duas tensões
( )σ σ τ
σ σ σ τ
− + =
= ± −
n
t t n
k
k
2 2 2
2 2
4 4
2, '
22' 4 τ−=σ−σ ktt
Zona A
Zona B
σ
B
n
σt
σ
LDT
σt
τ
σt'
n
σn
A
τ
σt'
σn
P
P
P
τ
σt'n
PA
τ
σ
-k
σt
PBσ
τ
k
0
24
Método das linhas de escorregamentoDescontinuidade de tensão – Interpretação físicaO fenómeno não corresponde propriamente a uma descontinuidade das tensões que actuam paralelamente à linha, mas a uma variação muito rápida, representada no plano das tensões pelo conjunto de círculos de Mohr a tracejado:
LDT surge como uma lâmina elástica de espessura reduzida (que no limite se confunde com a própria linha) O estado de tensão do semi-plano A evoluiu para o do semi-plano B passando através de sucessivos estados de tensão elásticos (círculos de Mohr com raio inferior a k).
NOTA: Por isso uma LDT não pode ser, nem sequer atravessada por uma linha de escorregamento

7
25
Método das linhas de escorregamentoCampos de linhas de escorregamento simples
CAMPO UNIFORME - consiste num conjunto de linhas de escorregamento rectas e ortogonais entre si.
Como não existe curvatura associada a este tipo particular de campo de linhas de escorregamento, a tensão média, σm , não varia ao longo do campo - é constante.
LEQUE - é constituído por um ponto singular, que não é mais do que o centro geométrico de vários arcos de círculo atravessados por linhas rectas que nele convergem.
Possui valores de tensão média, σm , iguais ao longo de cada linha radial, mas variáveis entre cada uma das linhas radiais.
No ponto singular o valor da tensão média não é determinado.
Existem dois tipos de campos de linhas de escorregamento particularmente simples e que uma vez combinados estão na base de inúmeras soluções utilizadas na análise de processos de deformação plástica:
ponto singular
26
Método das linhas de escorregamentoExemplo de aplicaçãoCampo de linhas de escorregamento proposto por Prandtl para a indentação sem atrito em condições de deformação plástica plana:
Combina os elementos básicos referidos:
• Campos uniformes (O’B’C’, O’AO e OBC)• Leques (O’AB’ e OAB)
Os pontos O e O’ onde convergem as linhas de escorregamento são pontos singulares
Condições de fronteira:
• Superfície livre - ao longo de O’C’ e OC.
Ao longo da superfície livre OC, a condição de fronteira determina que:
Superfície livre + campo uniforme OBC ⇒ estado de tensão característico desta região seja representado através de um único círculo de Möhr tangente ao eixo das tensões de corte, do lado das tensões normais de compressão.
2k ,0 31 −=σ=σ=σ=σ xy
27
Método das linhas de escorregamentoExemplo de aplicação - Indentação sem atrito em condições de deformação plástica plana
De acordo com a posição do pólo do círculo de Mohr, e atendendo à convenção que define o sentido da distorção das linhas α e β:
• linha BC - linha de escorregamento do tipo α• linha OB - linha de escorregamento do tipo β.
28
Método das linhas de escorregamentoExemplo de aplicação - Indentação sem atrito em condições de deformação plástica plana
Determinação do campo de tensões na zona do leque OAB [O, (1,III), (1,I)] :
O estado de tensão calculado para o ponto (1,III) é igual ao estado de tensão no interior do campo uniforme situado debaixo do cunho.
⇔π−=φ∆=σ∆π
−=φ∆−
22 I1,III1, kkm
)1(I1,III1,I1,III1, π+−=π−−=σ∆+σ=σ−
kkkmmm
Eqs. de Hencky (a variação angular quando se caminha ao longo da linha α do ponto (1,I) para o ponto (1,III) é horária):
O valor da tensão média no ponto (1,III) - a posição geométrica do centro do círculo no plano das tensões, é:
8
29
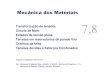
Método das linhas de escorregamentoExemplo de aplicação - Indentação sem atrito em condições de deformação plástica plana
Determinação da pressão de compressão aplicada pela ferramenta, p :
• Identificar o pólo do círculo que representa o estado de tensão no campo uniforme debaixo do cunho;• Admitir que essa pressão é superior (em módulo) à tensão secundária segundo a direcção x, induzida pela deformação:
adimensionalizando com a tensão limite de elasticidade (em módulo):
p k k ky mIII O AO III= = = = − + = − − +σ σ σ σ π3 31 1
1, ' ,
( )
pk2
12
2 57= +⎛⎝⎜
⎞⎠⎟ ≅
π.
30
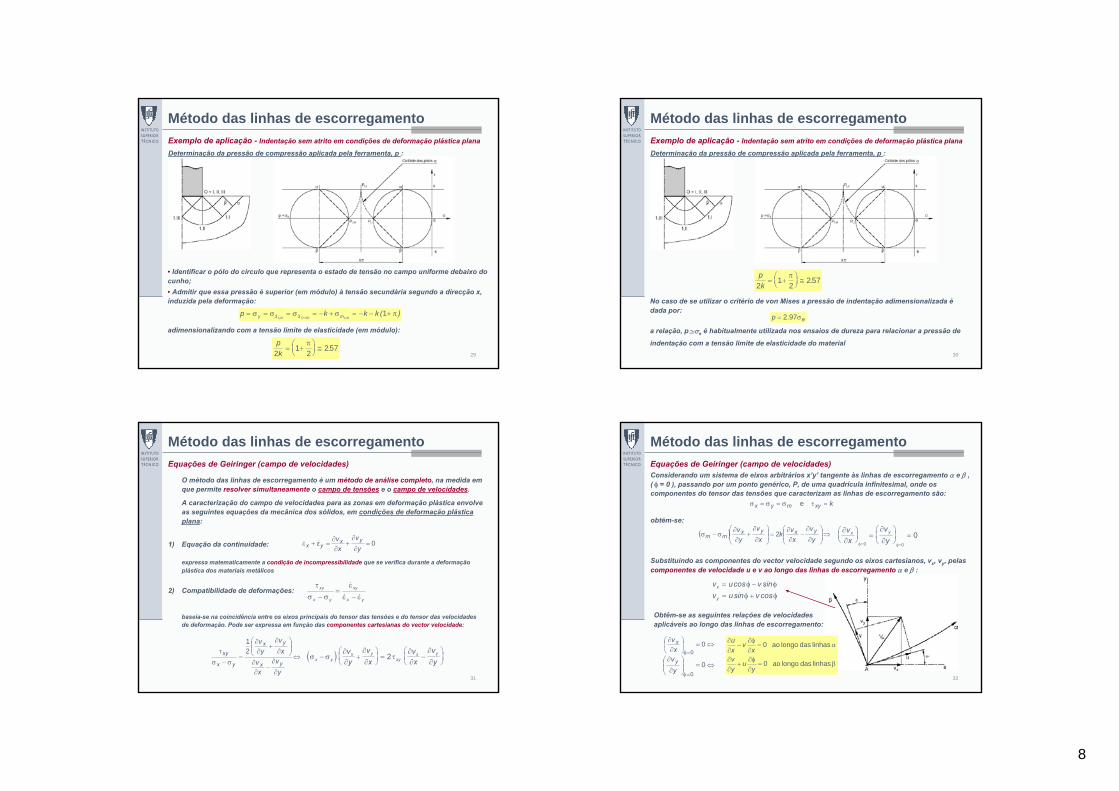
Método das linhas de escorregamentoExemplo de aplicação - Indentação sem atrito em condições de deformação plástica plana
Determinação da pressão de compressão aplicada pela ferramenta, p :
pk2
12
2 57= +⎛⎝⎜
⎞⎠⎟ ≅
π.
No caso de se utilizar o critério de von Mises a pressão de indentação adimensionalizada édada por:
a relação, pzσe é habitualmente utilizada nos ensaios de dureza para relacionar a pressão de
indentação com a tensão limite de elasticidade do material
ep σ= 97.2
31
Método das linhas de escorregamentoEquações de Geiringer (campo de velocidades)
O método das linhas de escorregamento é um método de análise completo, na medida em que permite resolver simultaneamente o campo de tensões e o campo de velocidades.
A caracterização do campo de velocidades para as zonas em deformação plástica envolve as seguintes equações da mecânica dos sólidos, em condições de deformação plástica plana:
1) Equação da continuidade:
expressa matematicamente a condição de incompressibilidade que se verifica durante a deformação plástica dos materiais metálicos
2) Compatibilidade de deformações:
baseia-se na coincidência entre os eixos principais do tensor das tensões e do tensor das velocidades de deformação. Pode ser expressa em função das componentes cartesianas do vector velocidade:
0=∂
∂+
∂∂
=+εyv
xvε yx
yx &&
yx
xy
yx
xy
ε−εε
=σ−σ
τ&&
&
⇔
∂
∂−
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂+
∂∂
=σ−σ
τ
yv
xv
xv
yv
yx
yx
yx
xy 21
( )σ σ∂∂
∂∂
τ∂∂
∂∂x y
x yxy
x yvy
vx
vx
vy
− +⎛⎝⎜
⎞⎠⎟ = −
⎛⎝⎜
⎞⎠⎟2
32
Método das linhas de escorregamentoEquações de Geiringer (campo de velocidades)Considerando um sistema de eixos arbitrários x’y’ tangente às linhas de escorregamento α e β , ( φ = 0 ), passando por um ponto genérico, P, de uma quadrícula infinitesimal, onde os componentes do tensor das tensões que caracterizam as linhas de escorregamento são:
obtém-se:
Substituindo as componentes do vector velocidade segundo os eixos cartesianos, vx, vy, pelas componentes de velocidade u e v ao longo das linhas de escorregamento α e β :
kxymyx =τσ=σ=σ e
∂∂
∂∂φ φ
vx
vy
x y⎛⎝⎜
⎞⎠⎟ =
⎛⎝⎜
⎞⎠⎟ =
= =0 0
0( ) ⇒⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂−
∂∂
=⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
σ−σyv
xvk
xv
yv yxyx
mm 2
v u vv u vx
y
= −= +cos sinsin cos
φ φφ φ
Obtêm-se as seguintes relações de velocidades aplicáveis ao longo das linhas de escorregamento:
β=∂∂φ
+∂∂
α=∂∂φ
−∂∂
linhas das longo ao 0
linhas das longo ao 0
yu
yv
xv
xu⇔=⎟
⎠⎞
⎜⎝⎛
∂∂
=φ0
0xvx
⇔=⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂
=φ
00y
vy

9
33
Método das linhas de escorregamentoEquações de Geiringer (campo de velocidades)
β=∂∂φ
+∂∂
α=∂∂φ
−∂∂
linhas das longo ao 0
linhas das longo ao 0
yu
yv
xv
xu
Componentes do vector velocidade segundo os eixos cartesianos xy e
aolongo das linhas de
escorregamento α e β
Derivadas são determinadas ao longo das tangentes às linhas de escorregamento ⇒ estas equações reduzem-se a funções de uma variável, permitindo substituir as derivadas parciais por derivadas totais.
Obtendo-se assim as relações diferenciais válidas para o campo de velocidades em condições de deformação plástica plana (equações de Geiringer):
β=φ+α=φ− linhas das longo ao 0 linhas das longo ao 0
uddvvddu
Consequências:
A velocidade tangencial permanece constante ao longo de linhas de escorregamento rectilíneas, uma vez que a variação angular ao longo da linha é nula (φ=Cte).
Não significa que a velocidade total seja necessariamente constante ao longo de uma linha de escorregamento rectilínea, já que a velocidade segundo a direcção normal à linha de escorregamento pode variar!!! 34
Método das linhas de escorregamentoEquações de Geiringer – Significado geométricoDois pontos A e B infinitamente próximos situados sobre uma linha de escorregamento α.
• u e v - velocidades absolutas segundo as direcções de α e β no ponto A• u+du e v+dv - velocidades absolutas no ponto B.
A variação do comprimento na unidade de tempo:
sendo dφ uma quantidade infinitamente pequena,obtém-se:
ABl =∆
⎥⎦⎤
⎢⎣⎡ φ
+φ
−⎥⎦⎤
⎢⎣⎡ φ
+−φ
+=∆
2sin
2cos
2sin)(
2cos)()( dvduddvvdduu
dtld
12
cos 22
sin ≅φφ
≅φ ddd
d ldt
du v d( )∆
= − φ
como as linhas de escorregamento são linhas de distorção máxima, o seu comprimento não varia
, e por isso:0/)( =∆ dtld
0)(=φ−=
∆ dvdudtld
35
Método das linhas de escorregamentoEquações de Geiringer – Significado geométrico
Físico-geométrico: Para que não exista variação de comprimento da linha de escorregamento é necessário que o vector ∆V, que corresponde à diferença de velocidades entre A e B, seja perpendicular a
Conclui-se: as equações de Geiringer traduzem matematicamente o facto de entre dois pontos infinitamente próximos, situados sobre uma linha de escorregamento, a velocidade total sópoder variar na direcção normal a essa linha de escorregamento para que o alongamento da linha seja nulo e somente exista distorção.
ABl =∆
36
Método das linhas de escorregamentoCondições de fronteira relativas ao campo de velocidadesA determinação do campo de velocidades também envolve a introdução de condições de fronteira. De entre as condições de fronteira mais usuais, evidenciam-se:
• Zonas de contacto entre o material e as ferramentas - A componente normal da velocidade terá de ser igual à da ferramenta - Em termos relativos, o material só poderá, quanto muito, deslocar-se tangencialmente à superfície de contacto.
• O campo de velocidades tem que respeitar as linhas de simetria cinemáticas do problema. Nem sempre as linhas de simetria cinemáticas coincidem com as linhas de simetria geométricas, por exemplo: a compressão uniaxial com um único prato móvel.
• No caso particular de uma linha de simetria intersectar uma fronteira material (ferramenta, por exemplo), a velocidade nesse ponto é nula e corresponde a um ponto de inversão do sentido da velocidade tangencial sobre a superfície de contacto com a fronteira - designado por pontos neutro.

10
37
Método das linhas de escorregamentoDescontinuidade de velocidade - LDVNa construção dos campos de velocidade existe, muitas vezes, a necessidade de se introduzirem linhas de descontinuidade de velocidade (LDV) para assegurar a compatibilidade cinemática do campo de velocidades e a satisfação integral das condições de fronteira.
A linha de descontinuidade de velocidade (LDV) é um artifício que se introduz na resolução cinemática de alguns problemas de linhas de escorregamento e que permite dividir o plano físico em dois semi-planos com velocidades totais diferentes.
Existem regras para definir esta diferença de velocidades que não podem ser ignoradas!!!
A conservação de massa, característica da deformação plástica dos materiais metálicos, e a própria integridade do material em deformação (ausência de defeitos de enformabilidade, como sejam, a abertura de fendas), determinam que:
• A componente normal da velocidade deve ser igual de um e do outro lado da linha de descontinuidade de velocidade;
• A descontinuidade de velocidade está sempre associada à diferença da componente tangencial de velocidade entre os dois semi-planos;
38
Considere-se uma linha de descontinuidade de velocidade α dividindo o plano físico em dois semi-planos A e B. Aplicando as equações de Geiringer a ambos os lados da linha de descontinuidade de velocidade:
Como a componente normal da velocidade deve permanecer igual de ambos os lados da linha de descontinuidade de velocidade (vA=vB):
Método das linhas de escorregamentoDescontinuidade de velocidade - LDVDo ponto de vista físico, uma linha de descontinuidade de velocidade é uma faixa estreita onde a distorção do material na direcção tangencial é infinitamente grande.
Portanto, a direcção da linha de descontinuidade de velocidade terá de coincidir sempre com a da tensão de corte máxima e, por isso, com a de uma linha de escorregamento.
• O valor da intensidade da descontinuidade de velocidade (diferença entre os módulos das velocidades) é constante ao longo de toda a linha de descontinuidade de velocidade.
00
=φ−=φ−
dvdudvdu
BB
AA
u u CteA B− = .
39
D
1,IIIB
A
1,II
O
αβ
1,I
AD
Vo
O'
Método das linhas de escorregamentoExemplo de aplicação - Indentação sem atrito em condições de deformação plástica planaObjectivo: Determinação do campo de velocidades e respectiva representação vectorial no hodógrafo.
Analisando o processo numa perspectiva cinemática:
• A região adjacente ao cunho [O’ (1,III) O] move-se com uma velocidade igual à velocidade do cunho, v0 -pois esta zona é atravessada por uma linha de simetria vertical, pelo que qualquer ponto material situado no interior da região delimitada à direita pela linha [O, (1,III)], terá como velocidade total a velocidade do cunho.
• Pontos materiais adjacentes ao ponto (1,III), mas localizados no interior do leque [O, (1,III), (1,I)] devem possuir uma velocidade tangente à linha [(1,III), (1,I)] (arco do leque), uma vez que todos pontos materiais situados abaixo desta linha encontram-se isentos de qualquer tipo de movimento.
40
Método das linhas de escorregamentoExemplo de aplicação - Indentação sem atrito em condições de deformação plástica planaSurge assim a necessidade de se introduzirem as linhas de descontinuidade de velocidade assinaladas a tracejado:
Tem de se estabelecer uma convenção para distinguir as velocidades próprias de cada uma das novas zonas criadas pelas descontinuidades de velocidade:
Um ponto localizado na intersecção de duas linhas de descontinuidade de velocidade pode ter quatro representações distintas:
• A sua posição é referenciada adicionando à designação do ponto uma letra identificando o quadrante em que este se situa. Utilizam-se as letras A, B, C e D, respectivamente para os 1º, 2º, 3º e 4º quadrantes
Convenção para identificar as zonas adjacentes das linhas dedescontinuidades de velocidade

11
41
Método das linhas de escorregamentoExemplo de aplicação - Indentação sem atrito em condições de deformação plástica planaConstrução do hodógrafo (plano das velocidades):
• A velocidade de qualquer ponto material situado no interior do campo uniforme adjacente ao cunho serárepresentada no hodógrafo pelo vector [O, (1,III,B)]
• Qualquer ponto material situado junto ao ponto (1,III), interior ao leque tem que ter velocidade absoluta tangente à linha α no ponto (1,III), representando-se no hodógrafo através do vector velocidade cujo extremo está em (1,III,A)
• Como o valor da descontinuidade de velocidade se mantém constante ao longo de qualquer linha de descontinuidade de velocidade - tomando a descontinuidade de velocidade α1 , para determinar
no hodógrafo as velocidades dos pontos que se localizam sobre esta linha, basta traçar um arco de circunferência ligando os pontos (1,III,A) e (1,I,A)
• A velocidade do ponto (1,I,A) coincide com a velocidade de qualquer ponto material situado no interior do campo uniforme que lhe é adjacente.NOTA: a linha de escorregamento [O, (1,I)] não é uma LDV, uma vez que é possível definir nesta zona uma variação gradual de velocidade
D
1,IIIB
A
1,II
O
αβ
1,I
AD
Vo
1,III A
1,I A
1,II A
o= V1,III B
O = 1,III D = 1,II D = 1,I D
42
Método das linhas de escorregamentoExemplo de aplicação - Indentação sem atrito em condições de deformação plástica plana
A linha de escorregamento [O, (1,I)] não é uma LDV !!!
Esta mesma conclusão poderia ter sido tirada de um outro modo:
• Sendo a linha de escorregamento α1 uma linha de descontinuidade de velocidade, ao encontrar a linha de simetria vertical irá sofrer uma reflexão numa linha da outra família, no caso βIII.
• Esta linha (βIII) termina no ponto O que é um ponto singular e, cujas propriedades determinam que, qualquer linha de descontinuidade de velocidade que aí conflua desapareça:
Metaforicamente: os pontos singulares são ‘buracos negros’ para as linhas de descontinuidade de velocidade!!
D
1,IIIB
A
1,II
O
αβ
1,I
AD
Vo
1,III A
1,I A
1,II A
o= V1,III B
O = 1,III D = 1,II D = 1,I D
Uma linha de descontinuidade de velocidade encontra uma fronteira rígida ou uma linha de simetria sofre reflexão segundo a linha da outra família que concorre nesse ponto!!!
43
Método das linhas de escorregamentoExemplo de aplicação - Indentação sem atrito em condições de deformação plástica planaLinhas de fluxo:
Ilustram o escoamento do material durante o processo de deformação plástica
As linhas de fluxo obtêm-se a partir do campo de velocidades, e são tangentes ao vector velocidade em cada ponto.
NOTA: não devem ser confundidas com as linhas de escorregamento, já que estas últimas são linhas de tensão de corte máxima que caracterizam o problema estaticamente, mas não fornecem qualquer tipo de informação relativa ao movimento do material! 44
Método das linhas de escorregamentoProblema 8.1Considere a operação de extrusão directa sem atrito, em condições de deformação plana, com uma relação de extrusão R=2:
a) Determine o campo de tensões e proceda à sua representação no plano de Mohr.
b) Calcule o valor da pressão de extrusão adimensionalizada com a tensão limite de elasticidade do material.
c) Determine o campo de velocidades e proceda à sua representação no hodógrafo.
CB
A
qr
zona morta
q
1h /2
0
O
0E
45°45°
0
00
2k
2k
0
r
0h /2
v0
90º

12
45
Método das linhas de escorregamentoProblema 8.1 - Resolução
90°
a)
46
Método das linhas de escorregamentoProblema 8.1 - Resoluçãob) Para determinar a pressão de extrusão começa-se por identificar-se o valor da pressão, q ,
que o material exerce sobre a parede vertical do contentor:
A pressão de extrusão, p, pode ser determinada através do equilíbrio de forças horizontais:
a qual adimensionalizada com a tensão limite de elasticidade do material fica:
⎟⎠⎞
⎜⎝⎛ π
+−=π+−−=σ+−=σ=σ=2
12)1(,3,13 kkkkqIIIIII mx
⎟⎠⎞
⎜⎝⎛ π
+=⎟⎠⎞
⎜⎝⎛ −⎟
⎠⎞
⎜⎝⎛ π
+=−
=2
1112
12)(
0
10 kR
khhhqp
285.12
121
2≅⎟
⎠⎞
⎜⎝⎛ π
+=kp
CB
A
qr
zona morta
q
1h /2
0
O
0E
45°45°
0
00
2k
2k
0
r
0h /2
v0
90º
47
• Pontos materiais situados no interior do campo uniforme localizado à saída da fieira devem possuir uma velocidade horizontal compatível com a conservação de volume:
• Pontos materiais que estejam localizados no interior do campo uniforme que se situa à direita da linha de escorregamento βIII devem, por questões de compatibilidade cinemática, possuir uma velocidade nula – zona morta
• Em face do exposto resulta a necessidade de se introduzirem as linhas de descontinuidade de descontinuidade de velocidade
Método das linhas de escorregamentoProblema 8.1 - Resoluçãoc) Analisando a cinemática da deformação:
• o material adjacente ao cunho de extrusão irá mover-se com a sua velocidade, v0, pelo que qualquer ponto material situado no interior da zona delimitada à esquerda pelo cunho e àdireita pela linha de escorregamento α1
terá obrigatoriamente uma velocidade igual a v0;
0011100 2vRvvhvhv ==⇒=
90°
48
Método das linhas de escorregamentoProblema 8.1 - Resoluçãoc) O hodógrafo, resume o campo de velocidades que resulta da análise cinemática do processo:
90°
0v
1,III C = 1,II C = 1,I CO=1,III B
1,III A
45º
1,I B
1,I A
45º
1,II A = 1,II B
1v = 2 v0

13
49
Método das linhas de escorregamentoProblema 8.1 - Resoluçãoc) Linhas de fluxo que ilustram o escoamento do material durante o processo de extrusão -
obtêm-se a partir do campo de velocidades, e são tangentes ao vector velocidade em cada ponto:
0vh /20
45°
1,I
1,II
45°
E
90º O
h /21
zona morta
α
1,III
β
AB
C
v1
0= 2 vv1
1,II A = 1,II B
45º
1,I A
1,I B
45º
1,III A
O=1,III B 1,III C = 1,II C = 1,I C
v0
50
Método das linhas de escorregamentoProblema 8.2Considere a operação de extrusão inversa (por impacto) sem atrito, em condições dedeformação plana:
a) Determine o campo de tensões e proceda à sua representação no plano de Mohr
b) Calcule o valor da pressão aplicada pelo cunho
c) Determine o campo de velocidades e proceda à sua representação no hodógrafo.
1v
E
2 L
L
p
p
AB
O
D
C
zona morta
0
02k 2k
00
00
0v
45º
90º
51
Método das linhas de escorregamentoProblema 8.2 - Resoluçãoa)
90°
52
Método das linhas de escorregamentoProblema 8.2 - Resoluçãob) O valor da pressão, p , aplicada pelo cunho obtém-se directamente do plano de Mohr:
a qual adimensionalizada com a tensão limite de elasticidade do material fica:⎟⎠⎞
⎜⎝⎛ π
+−=σ+−=2
12,1 kkp Im
90°
57.22
≅kp

14
53
• Para os pontos materiais situados abaixo da linha de escorregamento βI, as condições cinemáticas do problema determinam que estejam isentos de qualquer tipo de movimento - uma zona morta.
• Em face do exposto resulta a necessidade de se introduzirem as linhas de descontinuidade de descontinuidade de velocidade
Método das linhas de escorregamentoProblema 8.2 - Resolução
0110 vvLvLv =⇒=
90°
c) Analisando a cinemática da deformação:
• sabe-se que o campo uniforme adjacente àbase do cunho de extrusão move-se com uma velocidade igual à velocidade do punção, v0
• o material situado no interior do campo uniforme que se encontra delimitado pela linha de descontinuidade de tensão OE e pela linha de escorregamento α3 , tem que se deslocar com uma velocidade vertical, respeitando simultaneamente a condição de fronteira imposta pelas paredes verticais do contentor e assegurando a condição de incompressibilidade do material:
54
Método das linhas de escorregamentoProblema 8.2 - Resoluçãoc) O hodógrafo, resume o campo de velocidades que descreve a cinemática da operação de
extrusão inversa:
90°
55
Método das linhas de escorregamentoProblema 8.2 - Resoluçãoc) Linhas de fluxo que ilustram o escoamento do material durante o processo de extrusão -
obtêm-se a partir do campo de velocidades, e são tangentes ao vector velocidade em cada ponto:
56
Método das linhas de escorregamentoProblema 8.3Considere a operação de compressão sem atrito em condições de deformação plana com pratos compressores de menor dimensão do que a peça:
Admitindo que a tensão limite de elasticidade do material é σe = 2k, determine:
a) A variação da pressão de compressão, p , em função da relação entre a espessura da peça e a largura do cunho compressor, H/L , para o intervalo de variação 0 ≤ H/L ≤ 1.
b) Como na alínea anterior, mas considerando agora o seguinte intervalo de variação 1 < H/L < 8.74.
c) Como nas anteriores alíneas, mas para H/L ≥ 8.74. Represente graficamente a evolução da pressão de compressão, adimensionalizada com a tensão imite de elasticidade do material, em função da relação H/L
d) O campo de velocidades para um campo de linhas de escorregamento representativo de cada um dos intervalos considerados nas alíneas a) e b). Represente as linhas de fluxo em cada um dos casos que analisar.