Embed Size (px)
Citation preview



i

ii

iii
AGRADECIMENTOS
Em primeiro lugar, ao meu orientador Prof. Dr. Paulo Gil, pela amizade, credibilidade,
apoio e completa disponibilidades, fundamentais para a realização deste trabalho, mostrando-
me que não há limites para a criatividade humana e arte de fazer Ciência. Muito obrigado pela
sua dedicação e amizade.
Ao Prof. Dr. Luís de Brito Palma na qualidade de co-orientador, pelos conselhos e
sugestões, de fundamental importância para a consolidação de conceitos relacionados com a
produção de algoritmos, que contribuíram de forma bastante relevante para o
desenvolvimento deste trabalho.
À Prof. Dra. Valentina Vassilenko na qualidade de co-orientadora e ao Departamento de
Física, pelos conselhos, sugestões e esclarecimentos na área da biomecânica do movimento
humano, disponibilizando todo o material necessário para a validação experimental do
modelo desenvolvido e respectivas simulações.
Ao Departamento de Engenharia Electrotécnica e em particular à secção de Decisão e
Controlo, pelos meios disponibilizados e total apoio para a realização deste trabalho.
Aos meus amigos de infância Bruno Alves, Fábio Costa, Frederico Magina, Gonçalo
Cabecinhas, Vasco Firmino e Rui Marques dedico este trabalho com grande amizade, nunca
esquecendo os bons momentos passados, ainda hoje recordados com saudade.
Finalmente, mas sem dúvida o mais importante, dedico este trabalho aos meus pais que
sempre me apoiaram em tudo na minha vida, acreditando sempre que seria capaz de alcançar
os meus objectivos. Dedico também este trabalho para a pessoa de todos os momentos
difíceis, fáceis, alegres e tristes, que sempre esteve ao meu lado, demonstrando que o amor e
amizade não têm limites. Marlene Guerreiro Antunes, obrigado por existires na minha vida. A
maior dedicatória que posso fazer vai para a minha querida avó, que sempre esteve ao meu
lado para eu poder acabar esta etapa da minha vida…obrigado.
Olha por mim …

iv

v
―If you can’t explain it simply you don’t understand it well enough.”
Albert Einstein
Aos meus pais, à Marlene, ao nosso futuro…
À minha querida avó…

vi

vii
ÍNDICE
Lista de Figuras………………………………………………………………………………....xi
Lista de Quadros……………………………………………………………………….……...xvi
Simbologia………………………………………………………………………………….….xix
Lista de Acrónimos…………………………………………………………………………....xxi
Resumo…………………………………………………………………………………….…xxiii
Abstract………………………………………………………………………………….……...xv
CAPÍTULO 1 – INTRODUÇÃO……………………………….……………………….….…...1
1.1. Motivação………………………………………………………………………….….….…1
1.2. Objectivos e Contribuições………………………………………………………….…........3
1.3. Estrutura da Dissertação…………………………………………………………….……....4
CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO……………………..…......7
2.1. Cinemática do Movimento Humano……………………………………………………......7
2.2. Síntese do Movimento Humano…………………………………………………………...11
2.3. Síntese da Modelação Neuro-Músculo-Esquelética………………………………...……16
2.3.1. O Modelo de Hill…………………………………………………………………….16
2.3.2. O Modelo de Zajac…………………………………………………………………..19
2.3.3. Modelo do Par Excitação – Contracção……………………………………………..20
2.3.4. Associação entre a Activação Muscular e a Força Isométrica……………………...21
2.3.5. Modelos Musculares do Tipo SISO…………………………………………………22
2.3.6. Factores de Escala na Modelação Muscular…………………………………………25
2.3.7. Modelação Mecânica dos Tendões……………………………………………..……27
2.3.8. Modelação Mecânica do Actuador Músculo-Tendíneo…………………………….30

viii
CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSCULO-
ESQUELÉTICO………………………………………………………………………………..32
3.1. Contextualização…………………………………………………………………………..33
3.2. Anatomia do Braço Humano……………………………………………………………....34
3.2.1. Articulação do Ombro………………………………………………………………..35
3.2.2. Articulação do Cotovelo……………………………………………………………...37
3.2.3. Estrutura Muscular………………………………………………………………...….39
3.3. Arquitectura do Modelo…………………………………………………………………...40
3.3.1. Dinâmica de Recrutamento das Unidades Motoras………………………………....45
3.3.2. Dinâmica de Activação Muscular……………………………………………………47
3.3.3. Propriedades Mecânicas Musculares………………………………………………...51
3.3.4. Dinâmica dos Fusos Musculares e Comando Gama………………………………...53
3.3.5. Retroacção dos Órgãos Tendinosos de Golgi……………………………………….56
3.3.6. Dinâmica do Actuador Músculo-Tendíneo………………………………………….54
3.3.7. Dinâmica Articular…………………………………………………………………...60
3.4. Simulação Numérica e Resultados………………………………………………………...61
3.5. Validação e Análise Comparativa…………………………………………………………81
3.5.1. Métodos de Electromiografia………………………………………………….…......82
3.5.2. Ensaios Experimentais e Resultados………………………………………………...84
3.5.3. Análise Comparativa………………………………………………………………..109
CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICIAIS…….110
4.1. O Neurónio Artificial…………………………………………………………………….111
4.2. Topologias Neuronais…………………………………………………………………….114
4.3. Controlo Neuronal………………………………………………………………………..116
4.3.1. Arquitectura Geral de Controlo Neuronal………………………………………......116
4.3.2. Estratégias de Controlo Neuronal…….......................................................................118

ix
4.3.2.1. Controlo Neuronal Adaptativo Directo……………………………………….118
4.3.2.2. Controlo Neuronal Adaptativo Indirecto……………………………………...119
4.3.2.3. Controlo Neuronal por Modelo Interno……………………………………….120
4.3.2.4. Controlo Neuronal por Modelo Preditivo……………………………………..121
4.4. Simulação Numérica em Anel Fechado……………………………………………..…..122
CAPÍTULO 5 – CONCLUSÕES E TRABALHO FUTURO……………………………….134
5.1. Conclusões………………………………………………………………………………134
5.2. Perspectivas de Trabalho Futuro………………………………………………………...135
Referências Bibliográficas…………………………………………………………………...138
ANEXO – Especificações Técnicas da Unidade de Aquisição MP35……………………..144

x

xi
LISTA DE FIGURAS
Figura 2.1 – Posição anatómica de referência (M. Silva, 2004)……………………………….8
Figura 2.2 – Planos anatómicos de referências (M. Silva, 2004)………..…………………..…9
Figura 2.3 – Eixos anatómicos de referência (M. Silva, 2004)……………………….………10
Figura 2.4 – Os três principais movimentos que ocorrem no plano sagital (M. Silva, 2004)...10
Figura 2.5 – Modelo 3D de nove segmentos representando a marcha humana (Gilchrist and
Winter, 1996)………………………………………………………………………………....13
Figura 2.6 – Modelo 3D do membro superior humano, desenvolvido em OpenSim………...14
Figura 2.7 – Modelo 3D constituído por dez segmentos, vinte e três graus de liberdade e
quatro actuadores músculo-tendíneos, desenvolvido em OpenSim (Allison, et al., 2005)…..15
Figura 2.8 – Modelo 3D do ciclo da marcha humana, desenvolvido em SIMM……………..15
Figura 2.9 – Relação Força-Comprimento muscular para um componente elástico em série
(Ritchie, et al., 1958)………………………………………………………………………....17
Figura 2.10 – Modelo muscular do tipo Hill descrevendo a dinâmica de contracção do tecido
muscular (Zajac, 1989)………………………………………………………………….…....17
Figura 2.11 – Diagrama de blocos do modelo de Zajac (adaptado de Zajac, 1989)…………20
Figura 2.12 – Associação entre a activação muscular e a actividade electromiográfica (EMG)
num modelo muscular do tipo SISO (Zajac, 1989)……………………………………….….24
Figura 2.13 – Relação entre as fibras musculares com um ângulo de inclinação α e o tendão
(Zajac, 1989)……………………………………………………………………………….…27
Figura 2.14 – Propriedades materiais dos tendões. (A) Relação nominal tensão-elasticidade;
(B) Relação dimensional tensão-elasticidade (Zajac, 1989)……………………………...…..29
Figura 2.15 – Diagrama de blocos ilustrando a interacção entre o tendão e o músculo, na
geração de força. (A) Funcionamento conjunto entre os actuadores músculo-tendíneos e os
segmentos corporais; (B) Dinâmica do actuador e (C) Dinâmica de contracção do actuador
músculo-tendíneo (adaptado de Zajac, 1989)………………………………………….…….31

xii
Figura 3.1 – Estrutura hierárquica do sistema neuro-músculo-esquelético ao nível da espinal
medula (adaptado de Jinping, et al., 2001)…………………………………………………...34
Figura 3.2 – Articulação do ombro…………………………………………………………...37
Figura 3.3 – Articulação do cotovelo: vista posterior e lateral……………………………….38
Figura 3.4 – Deltóide Anterior……………………………………………………………….39
Figura 3.5 – Bicípete Braquial………………………………………………………………..40
Figura 3.6 – Tricípete Braquial……………………………………………………………….40
Figura 3.7 – Diagrama de blocos do sistema neuro-músculo-esquelético baseado na co-
activação alfa-gama……………………………………………………………………….….42
Figura 3.8 – Representação geométrica bidimensional (XOY) do sistema formado pelas duas
articulações (ombro e cotovelo) e pelos dois pares de músculos esqueléticos antagonistas
(bicípete braquial, tricípete braquial, deltóide anterior e deltóide posterior), (adaptado de Lan,
2002)………………………………………………………………………………………….43
Figura 3.9 – Representação geométrica (XOY) simplificada do sistema em causa,
considerando apenas uma articulação e um par de músculos antagonistas, (adaptado de Lan,
2005)………………………………………………………………………………………….44
Figura 3.10 – Comandos descendentes gerados em computador…………………………….46
Figura 3.11 – Dinâmica de recrutamento das unidades motoras sob a forma de modelo de
estado…………………………………………………………………………………………47
Figura 3.12 – Diagrama de blocos da excitação neuromotora………………………………..49
Figura 3.13 – Diagrama de activação muscular sob a forma de modelo de estado…………..51
Figura 3.14 – Dinâmica dos fusos musculares………………………………………………..54
Figura 3.15 – Dinâmica do actuador músculo-tendíneo (adaptado de Zajac, 1989)…………59
Figura 3.16 – Algoritmo correspondente ao modelo neuro-músculo-esquelético
desenvolvido………………………………………………………………………………….64
Figura 3.17 – Dinâmicas de recrutamento e excitação neuronal, face aos comandos
descendentes do SNC………………………………………………………………………...68

xiii
Figura 3.18 – Dinâmica de activação e geração de força muscular ao nível das fibras
intrafusais……………………………………………………………………………………..69
Figura 3.19 – Comprimento, velocidade e rigidez das fibras musculares……………………70
Figura 3.20 – Resposta sensorial dos proprioreceptores musculares………………………....71
Figura 3.21 – Trajectória e velocidade angular de cada uma das articulações, assim como os
seus momentos de torção e rigidez. Relações força-comprimento e força-velocidade
muscular………………………………………………………………………………………72
Figura 3.22 – Aproximação mecânica do braço humano, a um pêndulo simples…………….79
Figura 3.23 – Trajectória cartesiana da articulação do cotovelo…………………………..…80
Figura 3.24 – Trajectória cartesiana da articulação do ombro………………………………..80
Figura 3.25 – Trajectória cartesiana do membro superior modelado……………………..….81
Figura 3.26 – Electromiografia de profundidade e de superfície………………………….…82
Figura 3.27 – Ilustração gráfica da relação força-velocidade (EMD – Electromechanical
Delay), (Benno e Walter, 2003)……………………………………………………………....83
Figura 3.28 – Vista geral da unidade de aquisição MP35……………………………………85
Figura 3.29 – Pack de eléctrodos EL503 utilizados para aquisição electromiográfica……….85
Figura 3.30 – Conjunto de cabos SS2L………………………………………………………86
Figura 3.31 – Elementos constituintes da carga utilizada nos dados experimentais………....87
Figura 3.32 – Estrutura de suporte aos ensaios experimentais……………………………….87
Figura 3.33 – Aquisição em tempo real dos EMG’s do indivíduo realizando o movimento
padrão………………………………………………………………………………………...88
Figura 3.34 – Resultados experimentais do primeiro ensaio…………………………………89
Figura 3.35 – Resultados experimentais do segundo ensaio…………………………………90
Figura 3.36 – Resultados experimentais do terceiro ensaio…………………………………..91
Figura 3.37 – Algoritmo de validação do modelo desenvolvido……………………………..92
Figura 3.38 – EMG’s adquiridos durante o ensaio experimental n.º 1 e dinâmicas de activação
e força muscular, resultantes……………………………………………………….…………94

xiv
Figura 3.39 – Comprimento, velocidade e rigidez muscular, ensaio experimental n.º 1…….95
Figura 3.40 – Resposta sensorial dos proprioreceptores musculares, face ao comando gama,
ensaio experimental n.º 1……………………………………………………………………..96
Figura 3.41 – Trajectória e velocidade angular de cada uma das articulações; momentos de
torção e respectiva rigidez; relação força-comprimento e força-velocidade muscular, ensaio
experimental n.º 1…………………………………………………………………………….97
Figura 3.42 – Trajectória cartesiana da articulação do cotovelo, ao longo do tempo, ensaio
experimental n.º 1…………………………………………………………………………….98
Figura 3.43 – Trajectória cartesiana da articulação do ombro, ao longo do tempo, ensaio
experimental n.º 1…………………………………………………………………………….98
Figura 3.44 – Trajectória cartesiana do membro superior modelado, ao longo do tempo,
ensaio experimental n.º 1…………………………………………………………………….99
Figura 3.45 – EMG’s adquiridos durante o ensaio experimental n.º 3 e dinâmicas de activação
e força muscular, resultantes………………………………………………………………...100
Figura 3.46 – Comprimento, velocidade e rigidez muscular, ensaio experimental n.º 3…....101
Figura 3.47 – Resposta sensorial dos proprioreceptores musculares, face ao comando gama,
ensaio experimental n.º 3……………………………………………………………………102
Figura 3.48 – Trajectória e velocidade angular de cada uma das articulações; momentos de
torção e respectiva rigidez; relação força-comprimento e força-velocidade muscular, ensaio
experimental n.º 3……………………………………………………………………………103
Figura 3.49 – Trajectória cartesiana da articulação do cotovelo, ao longo do tempo, ensaio
experimental n.º 3……………………………………………………………………………104
Figura 3.50 – Trajectória cartesiana da articulação do ombro, ao longo do tempo, ensaio
experimental n.º 3……………………………………………………………………………104
Figura 3.51 – Trajectória cartesiana do membro superior modelado, ao longo do tempo,
ensaio experimental n.º 3……………………………………………………………………105
Figura 3.52 – Evolução temporal dos erros associados a cada uma das forças musculares, do
subsistema articular do cotovelo…….………………………………………………………106

xv
Figura 3.53 – Evolução temporal dos erros associados a cada uma das forças musculares, do
subsistema articular do ombro…….………………………………………………………...108
Figura 4.1 – Hall Project………………………………………………………………….…111
Figura 4.2 – Modelo do neurónio artificial com apenas uma entrada e uma saída………….112
Figura 4.3 – Modelo do neurónio artificial com m entradas e uma saída…………………...113
Figura 4.4 – Topologia neuronal: a) Monocamada completamente intraconectada; b)
Monocamada parcialmente intraconectada; c) Proactiva de três camadas e d) Dupla camada
retroactiva (adaptado de H. D. Ramos, 2002)……………………………………….………115
Figura 4.5 – Arquitectura de rede neuronal com treino e recuperação (adaptado de H. D.
Ramos, 2002)………………………………………………………………………………..117
Figura 4.6 – Arquitectura de controlo adaptativo directo…………………………………..118
Figura 4.7 – Arquitectura de controlo adaptativo indirecto………………………………...119
Figura 4.8 – Arquitectura de controlo neuronal por modelo interno………………………..121
Figura 4.9 – Arquitectura de controlo neuronal por modelo preditivo……………………...121
Figura 4.10 – Arquitectura de controlo neuronal IMC implementada no modelo
desenvolvido………………………………………………………………………………...122
Figura 4.11 – Conjunto de dados de estimação……………………………………………..125
Figura 4.12 – Conjunto de dados de validação……………………………………………..126
Figura 4.13 – Resultados do treino neuronal do modelo interno…………………………....127
Figura 4.14 – Variação temporal dos erros quadráticos associados ao treino neuronal do
modelo interno da instalação………………………………………………………………...127
Figura 4.15 – Resultados do treino neuronal do controlador…………………………….….128
Figura 4.16 – Variação temporal dos erros quadráticos associados ao treino neuronal do
controlador…………………………………………………………………………………..129
Figura 4.17 – Gráficos de Barras ilustrando o número óptimo de neurónios artificiais a utilizar
na camada interna……………………………………………………………………………130

xvi
Figura 4.18 – Trajectórias de referência e trajectórias obtidas à saída da instalação, com a
arquitectura IMC implementada…………………………………………………………….131
Figura 4.19 – Sinais de acção de controlo, geradas pelo controlador neuronal IMC
implementado………………………………………………………………………………..132

xvii
LISTA DE QUADROS
Quadro 3.1 – Parâmetros numéricos utilizados no modelo neuro-músculo-esquelético……..65
Quadro 3.2 – Características físicas da carga utilizada nos ensaios experimentais………….86
Quadro 3.3 – Valor médio do erro e a sua variância, em relação às quatro forças musculares,
ensaio experimental n.º1…………………………………………………………………….108
Quadro 3.4 – Valor médio do erro e a sua variância, em relação às quatro forças musculares,
ensaio experimental n.º3…………………………………………………………………….108
Quadro 4.1 – Exemplos de funções de activação neuronal…………………………………113
Quadro 4.2 – Parâmetros numéricos utilizados no treino neuronal………………………....124

xviii

xix
SIMBOLOGIA
a (t) Activação Muscular
u(t) Excitação Neuronal
ui(t) Excitação Neuronal de i Unidades Motoras (i = 1 … n)
τact Tempo de activação muscular
τdesact Tempo de desactivação muscular
τc Parâmetro de escala temporal
t Tempo
F0 m Força muscular isométrica
F m Força muscular
F PE
Força muscular passiva
F CE
Força muscular activa
F T Força produzida pelo tendão
F MT
Força produzida pelo actuador músculo – tendíneo
fl Relação força – comprimento muscular
flv Relação força – comprimento - velocidade muscular
fv Relação força – velocidade muscular
L0m Comprimento muscular isométrico
L m Comprimento muscular
L T Comprimento do tendão
L MT
Comprimento do actuador músculo – tendíneo
LT
S Quantidade de redução de comprimento do tendão, em relação
à sua posição de repouso
ΔLT Variação de comprimento do tendão
γLS Comprimento dos γ sarcómeros
v m Velocidade das fibras musculares

xx
v T Velocidade do tendão
vmax Velocidade máxima de encurtamento muscular
v MT
Velocidade do actuador músculo – tendíneo
T Tensão muscular
T0 Tensão muscular isométrica
TCE Tensão muscular do elemento contráctil
α Nervos motores alfa
α (t) Ângulo das fibras musculares
α0 Ângulo óptimo das fibras musculares
αaff Nervos motores aferentes alfa
αeff Nervos motores eferentes alfa
α – γ Co-activação alfa – gama
β Rácio entre τact e τdesact
γ Nervos motores gama
γ eff Nervos motores eferentes gama
σ Tensão muscular
ε T Elasticidade do tendão
σ T Tensão do tendão
εT
0 Elasticidade do tendão quando F T = F0
m
σT
0 Tensão do tendão quando F T = F0
m

xxi
LISTA DE ACRÓNIMOS
CE Elemento Contráctil (Contractil Element)
DE Elemento Amortecedor (Damping Element)
EC Par Excitação – Contracção (Excitation-Contraction Couple)
EMG Electromiografia (Electromiography)
IMC Controlo por Modelo Interno (Internal Model Control)
FE Electroestimulação Funcional (Functional Electro Estimulation)
MRAC Controlo por Modelo de Referência (Model Reference Control)
MPC Controlo por Modelo Predictivo (Model Predictive Control)
MIMO Múltiplas Entradas – Múltiplas Saídas (Multiple Inputs – Multiple Outputs)
SISO Uma Entrada – Uma Saída (Single Input – Single Output)
SEE Elemento Muscular Elástico em Série (Series Elastic Element)
SNC Sistema Nervoso Central
SNP Sistema Nervoso Periférico
PE Elemento Muscular Passivo (Passive Element)
GTO Órgãos Tendinos de Golgi (Golgi Tendon Organs)

xxii

xxiii
RESUMO
Em diversas situações clínicas, como sejam por exemplo, traumas ao nível da espinal-
medula, mielopatias degenerativas, entre outras, os doentes podem vir a manifestar a perda
sensorial e do controlo da função motora.
Este trabalho propõe o desenvolvimento de um modelo matemático quantitativo, para o
sistema neuro-músculo-esquelético humano, em particular, para o membro superior humano
incorporando algumas das suas dinâmicas, incluindo a retroacção dos proprioreceptores
musculares de Golgi. Foram estudadas as suas características estáticas e dinâmicas, assim
como toda a fisiologia neuromotora relacionada, tendo em vista a compreensão dos
fenómenos biológicos associados à mobilidade do braço humano. O objectivo primordial
deste modelo prende-se com a necessidade de desenvolver métodos práticos não invasivos
que permitam o estudo deste mesmo sistema, podendo ter aplicabilidade na área da
reabilitação motora. Foram estudadas técnicas de modelação biomecânica como base para a
construção do modelo biomecânico. A sua robustez e fiabilidade são testadas e avaliadas
tendo em vista a síntese de um modelo adequado aos objectivos propostos.
Com vista a poder controlar voluntariamente o movimento de um dos membros
superiores com base em trajectórias especificadas pelo ―doente‖, estuda-se a aplicação de
metodologias de controlo inteligente no contexto da interface homem-máquina, que permitam
o desenvolvimento de hardware protésico.
Palavras-chave: Sistema Neuro-Músculo-Esquelético, Modelação Biomecânica,
Electromiografia, Redes Neuronais Artificiais, Controlo Neuronal.

xxiv

xxv
ABSTRACT
In many clinical situations, such as degenerative myelopathy or spinal cord trauma,
where the descending commands are blocked at the spinal cord level, patients face the lost or
the impaired of their motor function.
This work proposes developing an analytical model of the human spinal neuro-musculo-
skeletal system applied to the human upper limb, by studying some of its static and dynamic
characteristics, including the Golgi proprioreceptors, as well as related neurophysiology
necessarily to the understanding of the biological phenomena associated to the upper limb.
The main goal of this model is the developing of non-invasive and practical tools to study this
system whose outcomes may have applicability in human motor rehabilitation. Additionally
biomechanical model techniques have been studied and incorporated in model. The model
performance and robustness were tested and evaluated.
This work also suggests the study and synthesis of intelligent control methodologies in
the human-machine interface context that will allow the implementation of prosthesis
hardware, in order to induce voluntary motor control of one of the patient’s upper limbs,
based on is trajectory references.
Keywords: Neuro-Musculo-Skeletal System, Biomechanics, Electromyogram, Artificial
Neural Networks, Neural Control.

xxvi

Página
1
CAPÍTULO 1 – INTRODUÇÃO
1.1 Motivação
O sistema neuro-músculo-esquelético humano é um sistema biológico bastante
complexo, com comportamento adaptativo e de forte não linearidade. Esta extrema
complexidade, tem desafiado a comunidade científica para uma mais profunda compreensão
da arquitectura estrutural e funcionamento deste sistema, abrindo novas perspectivas sobre
este tema (H. Jiping, et al., 2001), tendo aplicabilidade em várias áreas.
Recentemente, a síntese de modelos computacionais e controlo do movimento humano
tem sido, de forma generalizada, aplicado à robótica humanóide, com o desenvolvimento de
robôs bípedes como é o caso do ASIMO da Honda Corporation1. Contudo, a mesma
abordagem poderá ser aplicada ao estudo biológico do sistema neuro-músculo-esquelético
humano, tendo demonstrado um grande potencial na avaliação clínica ao nível da locomoção
e movimento humano. Este mesmo estudo apresenta obstáculos de uma complexidade
colossal, pois o corpo humano de um adulto de média idade, apresenta um total de 206 ossos
e 650 músculos esqueléticos. A velocidade de propagação do impulso nervoso na membrana
de um neurónio varia entre 10cm/s e 1m/s, sendo o sistema nervoso central humano uma
máquina de comunicação muitíssimo rápida e de uma precisão extrema. Todos estes factores
tornam a tarefa de modelar e recriar, as dinâmicas e comportamentos de partes do corpo
humano, um desafio científico de grande escala.
Vários trabalhos de investigação foram desenvolvidos em torno deste tema, tais como, o
estudo do papel dos reflexos ao nível da espinal medula para a postura e controlo de
movimento (Lan, et al., 2005), análise da estabilidade e controlo de postura em doentes
paralisados ao nível motor (Lan, 2002), desenvolvimento de algoritmos preditivos para
controlo neuromuscular (Keplan L., et al., 2001), entre outros. Estas investigações
demonstraram uma grande importância no desenvolvimento de modelos computacionais que
1 www.honda.com/ASIMO

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
2
permitissem estudar o sistema neuro-músculo-esquelético ao nível do seu funcionamento
generalizado.
Os estudos levados a cabo utilizando tecnologia da electro-estimulação funcional (FES)
resultaram num grande avanço do ponto de vista da engenharia de reabilitação, uma vez que
permitiu a identificação de estratégias e técnicas de controlo para reabilitação da função
motora em paraplégicos e quadraplégicos (Lan, 2002).
Desta forma, surgiram vários laboratórios de análise do movimento humano, análise
essa através de cinemetria. A cinemetria consiste num conjunto de métodos que permitem a
determinação da posição e orientação dos segmentos corporais, de forma a medir os
parâmetros cinemáticos do movimento, isto é, posição, orientação, velocidade e aceleração. O
instrumento básico para medidas cinemáticas é baseado em cameras de vídeo que registam a
imagem do movimento ou as coordenadas de pontos de interesse e então através de software
específico calculam as variáveis cinemáticas de interesse.
Para além dos sistemas de vídeo, a análise cinemática pode ser também efectuada
através de sensores piezoeléctricos que medem a intensidade e direcção das forças resultantes
de contacto com uma determinada superfície, bem como análise electromiográfica (EMG)
através da colocação de eléctrodos na superfície do músculo (EMG de superfície) ou no seu
interior (EMG de profundidade – in vivo), que monitorizam a actividade neuromuscular com
base na actividade eléctrica do músculo (M. Pandy, 2001), permitindo desta forma o estudo
do tempo de activação muscular durante a actividade motora.
Os dados recolhidos em laboratório revelam uma descrição quantitativa da cinemática e
dinâmica subjacente ao movimento dos vários segmentos corporais, não explicando contudo
de que forma é que o sistema muscular interage entre si de modo a produzir um padrão
coordenado de movimento. De forma mais específica, a cinemática, as forças de reacção e os
dados electromiográficos em assíncronia não explicam concisamente de que forma é que cada
músculo interage entre si para acelerar cada um dos segmentos corporais, num determinado
ciclo de movimento.
Com os recursos computacionais disponíveis actualmente, modelos biomecânicos do
sistema neuro-músculo-esquelético continuarão a ser desenvolvidos e aperfeiçoados, de modo
a estudar o controlo neuromuscular e a produzir simulações realísticas de determinados

CAPÍTULO 1 - INTRODUÇÃO
Página
3
padrões de movimento humano, com um grau de complexidade bastante superior aos
produzidos há cerca de uma década atrás (M. Pandy, 2001).
1.2 Objectivos e Contribuições
O objectivo principal deste trabalho consiste na elaboração de um modelo biomecânico
inovador, que permita o estudo das características estáticas e dinâmicas do sistema neuro-
músculo-esquelético humano, aplicado a um caso particular – o membro superior humano. O
desenvolvimento de um modelo deste tipo propõe um método prático não invasivo que
permita a análise das dinâmicas inerentes a este sistema, e que poderá ser associado ao estudo
de casos clínicos, onde os doentes manifestem a perda sensorial e controlo da função motora.
Do ponto de vista sistémico, são tidas em conta todas as dinâmicas constituintes do
sistema neuro-músculo-esquelético humano, obedecendo à sua estrutura biológica e
hierárquica. O desenvolvimento de um modelo analítico representativo deste sistema, tem
como contribuições principais o estudo dos tempos de activação muscular e recrutamento das
unidades motoras, durante um movimento de referência a que o membro superior humano é
sujeito. Desta forma, é possível analisar durante um movimento especifico quais são as
unidades motoras recrutadas e em que intervalo de tempo isso acontece e, posteriormente a
excitação provocada nas fibras músculo-esqueléticas. Estas, por sua vez irão exercer as forças
musculares que irão actuar directamente nas articulações do membro superior. A dinâmica
dos proprioreceptores musculares é também incluída no modelo, com principal destaque para
os órgãos tendinosos de Golgi. Estes são necessários para uma representação correcta do
sistema sensorial muscular, permitindo uma resposta adequada dos mesmos quando sujeitos a
uma determinada excitação neuromotora.
O desenvolvimento deste modelo assenta em duas fases:
1) Desenvolvimento do modelo analítico;
2) Validação do Modelo e análise estatística do mesmo, através de dados
electromiográficos
Como objectivo adicional é proposto o estudo e síntese de metodologias de controlo
inteligente no contexto da interface homem-máquina, utilizando redes neuronais artificiais de

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
4
forma a emular a dinâmica de controlo motor humano, permitindo assim controlar a
trajectória do membro modelado.
Na base do trabalho efectuado foi desenvolvido um artigo científico, cuja submissão foi
aceite e apresentado oralmente no Oitavo Simpósio Internacional de Métodos Computacionais
em Biomecânica e Engenharia Biomédica, (8th International Symposium on Computer
Methods in Biomechanics and Biomedical Engineering - http://www.cmbbe2008.cf.ac.uk/).
1.3 Estrutura da Dissertação
A presente dissertação está estruturada em 5 capítulos, sendo o presente capítulo o de
apresentação de motivações e objectivos do presente trabalho.
No capítulo 2 é discutida a biomecânica humana, apresentando o conceito de cinemática
do movimento humano, que estuda o movimento mecânico do corpo humano como um
conjunto de segmentos corporais independentes. Vários estudos de simulação e modelação
biomecânica com o recurso a sistemas computacionais são descritos, assim como a sua
evolução tecnológica. São igualmente analisadas várias técnicas de modelação físico-
matemática dos elementos neuro-músculo-esqueléticos, tendo em vista a construção de um
modelo analítico para o sistema neuro-músculo-esquelético, que contenha todas a dinâmicas
retratadas em cada um dos seus elementos constituintes.
No capítulo 3 descreve-se o modelo biomecânico do membro superior humano proposto
nesta dissertação. Faz-se uma caracterização matemática das estruturas implementadas, neste
caso, modelos individuais, que através de uma estrutura multi-modelo hierárquica compõem o
modelo global. São apresentados os resultados numéricos da simulação computacional, que
são sujeitos a validação posterior. Procede-se ainda à análise estatística do modelo, com o
objectivo de testar a sua fiabilidade.
O capítulo 4 é dedicado à implementação de uma estratégia de controlo inteligente, que
permita o seguimento de trajectórias de referência, ou seja, o controlo artificial do modelo
neuro-músculo-esquelético do membro superior humano, desenvolvido no capítulo 3. São
apresentadas as vantagens da utilização de um controlador artificial em cascata com este tipo
de modelos, sendo introduzidos os conceitos de rede neuronal artificial e de controlo

CAPÍTULO 1 - INTRODUÇÃO
Página
5
neuronal. Por fim, são apresentados os resultados obtidos com o sistema de controlo
implementado, discutindo o seu comportamento de acordo com o problema em causa.
Finalmente no capítulo 5 são apresentadas as conclusões e linhas de investigação
futuras, complementares ao trabalho apresentado.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
6

Página
7
CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
A biomecânica do movimento humano pode ser definida como uma ciência
interdisciplinar que descreve, analisa e avalia o movimento humano. Uma grande gama de
movimentos físicos é considerada desde o movimento físico de uma pessoa deficiente motora,
ao levantar de uma carga de peso variável por parte de um funcionário fabril, ao desempenho
de um atleta de alta competição. Os princípios físicos e biológicos aplicados serão iguais em
todos os casos. O que difere de um caso para o outro é exactamente a tarefa que leva a um
movimento específico e o nível de pormenor e performance de cada movimento (Winter,
2005).
A lista de profissionais e semiprofissionais interessados em aplicar aspectos do
movimento humano é bastante vasta: cirurgiões ortopédicos, treinadores de atletas,
engenheiros de reabilitação, terapeutas, cinésiologistas, projectistas de próteses, psiquiatras,
ortodontistas, designers de vestuário desportivo, entre outros. A um nível mais baixo, o nome
dado à ciência que estuda a área principal do movimento humano é a cinésiologia. Trata-se de
uma área de estudo em ascensão que compreende aspectos desde a psicologia, adaptação
motora, fisiologia assim como a biomecânica. A biomecânica, enquanto resultado das ciências
físicas e biológicas, assenta na compreensão da física, química, matemática, fisiologia e
anatomia do corpo humano. É de notar que os primeiros ―biomecânicos‖ no verdadeiro
sentido da palavra datam desde o período da Grécia antiga, DaVinci, Galileu, Lagrange,
Bernoulli, Euler e Young. Todos estes cientistas tiveram interesses primários na aplicação de
fundamentos de modelação mecânica para a resolução de problemas biológicos (Winter,
2005).
2.1 Cinemática do Movimento Humano
O movimento humano é geralmente descrito como uma combinação complexa de
movimentos de translação e de movimentos de rotação (M. Silva, 2004).
No caso do movimento de translação, este considera que todo o corpo se move de forma
única e que não existe movimento relativo de rotação entre segmentos anatómicos, pelo que

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
8
pode ser rectilíneo, caso ocorra ao longo de um segmento recto ou caso contrário, curvilíneo.
No caso do movimento de rotação, este considera que existe uma rotação do corpo ou de um
ou mais segmentos anatómicos, em torno de um eixo instantâneo de rotação normalmente
situado num centro articular (M. Silva, 2004).
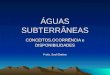
O corpo humano pode ser dividido geometricamente por planos anatómicos de
referência (vd Figura 2.1), também denominados de planos cardinais, são 3, perpendiculares
entre si (M. Silva, 2004):
1. Plano Sagital: Divide o corpo verticalmente, nas suas duas metades: direita e
esquerda. (Movimentos neste plano: corrida, marcha, bicicleta);
2. Plano Frontal: Divide o corpo verticalmente, nas suas duas metades: anterior e
posterior. (Movimentos neste plano: saltos laterais, roda, pontapés laterais em artes
marciais);
3. Plano Transverso: Divide o corpo horizontalmente, nas suas duas metades: inferior
e superior. (Movimentos neste plano: dança, ginástica, saltos artísticos).
Figura 2.1 – Planos anatómicos de referência (M. Silva, 2004).
Cada plano divide o corpo humano em duas metades de igual massa, sendo o ponto
comum de intersecção o centro de massa do corpo. Estes planos tornam-se de grande utilidade

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
9
na descrição de movimentos de grande amplitude e para a definição da terminologia
específica dos tipos de movimento do corpo humano. No entanto existem muitos movimentos
do corpo humano que não são orientados segundo estes planos, utilizando-se nestes casos
planos oblíquos (M. Silva, 2004).
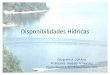
O movimento dos segmentos anatómicos do corpo humano ocorre em torno de um eixo
de rotação imaginário que passa pela junta à qual o segmento está ligado (M. Silva, 2004).
Existem três eixos de referência, utilizados na descrição do movimento humano, estando cada
um deles orientado perpendicularmente a um dos planos de referência:
1. Eixo médio-lateral: Perpendicular ao plano sagital, define os movimentos que
ocorrem nesse mesmo plano;
2. Eixo anteroposterior: Perpendicular ao plano frontal, define os movimentos que
ocorrem nesse mesmo plano;
3. Eixo longitudinal: Perpendicular ao plano transversal, define os movimentos que
ocorrem nesse mesmo plano.
Figura 2.2 – Os três eixos anatómicos de referência: eixo médio-lateral, longitudinal e
anteroposterior (M. Silva, 2004).
A posição anatómica de referência é considerada como sendo a postura de referência
utilizada na descrição da posição e movimento relativo entre os segmentos anatómicos do

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
10
corpo humano (vd. Figura 2.3). Esta corresponde a uma postura na qual o corpo se encontra
na posição erecta, com os pés ligeiramente separados e com os braços suspensos lateralmente,
com as palmas das mãos viradas para a frente (M. Silva, 2004).
Figura 2.3 – Posição anatómica de referência (M. Silva, 2004).
Os três principais movimentos que ocorrem no plano sagital são designados de flexão,
extensão e hiperextensão. O movimento de flexão implica uma rotação no plano sagital na
direcção anterior aos segmentos anatómicos da cabeça, tronco, braço, antebraço, mão e anca
numa direcção posterior para o segmento da perna (M. Silva, 2004). O movimento de
extensão consiste no movimento que retorna um segmento anatómico flectido à sua posição
de referência e o movimento de hiperextensão é definido como uma extensão para além da
posição anatómica de referência, na direcção oposta à direcção de flexão (M. Silva, 2004).
Figura 2.4 – Os três principais movimentos que ocorrem no plano sagital (M. Silva, 2004).

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
11
Uma vez que o modelo a desenvolver neste trabalho é bidimensional, apenas se irá
trabalhar no plano sagital do corpo humano, pelo que os movimentos correspondentes aos
restantes planos não serão tidos em conta.
2.2 Síntese do Movimento Humano
O movimento humano é um tema que tem atraído bastante a comunidade científica.
Como será descrito em pormenor no capítulo 3, a vasta análise cinética do movimento
humano baseia-se, essencialmente, na dinâmica inversa. Este tipo de análise leva a que
medidas cinemáticas sejam combinadas com forças externas (e.g., no caso do movimento do
ombro e cotovelo durante exercícios de flexão e extensão, exigindo contacto com o solo)
adquiridas experimentalmente, para estimar as forças de reacção internas e momentos de
torção (ao nível das articulações). Posteriormente, utilizam-se estas medidas cinemáticas em
modelos simples, formados apenas por um número reduzido de segmentos corporais, de modo
a estimar as forças que originam determinado movimento. Contudo, a resposta obtida é o
inverso do que realmente acontece. Se incluirmos o facto de o movimento humano ser uma
sequência articulada de eventos rápidos e complexos, que resulta da variação da excitação
neuronal ao nível muscular, a rede de efeitos provocados por todas as forças musculares que
actuam em cada articulação, gera um momento de força variante no tempo, que provoca a
aceleração (ou desaceleração) dos segmentos corporais adjacentes. Se esta aproximação for
modelada em computador, o seu resultado será uma ―solução inovadora‖ (Winter, 2005).
As potencialidades práticas e teóricas deste tipo de soluções é enorme. Contudo, devido
a uma série de constrangimentos, ainda nem todos os objectivos foram alcançados. Poder-se-á
colocar as seguintes questões, de modo a compreender este problema: ―O que aconteceria
se…?‖. Por exemplo, um treinador de atletas de alta competição poderia formular a seguinte
questão: ―O padrão de movimento do meu atleta é o ―óptimo‖, e caso não o seja, quais as
alterações a efectuar para o optimizar?‖ Um investigador poderia querer dar resposta a esta
pergunta com base em teorias de modelação matemática, física e controlo motor aplicado ao
ser humano, pretendendo testar a sua teoria através da simulação do respectivo modelo.
Todavia, antes de qualquer resposta válida, o modelo desenvolvido entretanto deverá ser
devidamente validado. Uma condição necessária (mas não suficiente) que tenha sido testada
poderá ser correspondente à validação final (Winter, 2005). No caso de uma representação

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
12
anatómica do corpo humano, através de um modelo constituído por um número reduzido de
segmentos corporais e respectivas articulações, uma solução inversa deverá ser encontrada de
modo a calcular os momentos de torção de cada articulação e em cada plano requerido
(sagital, coronal, etc.). Posteriormente, utilizar-se-iam estes padrões motores, conjuntamente
com as condições iniciais, como entradas do modelo, obtendo-se desta forma uma reprodução
original da cinemática inerente a este caso. Caso o modelo anatómico seja insuficiente,
mesmo com padrões cinemáticos válidos, ter-se-á como resultado um rápido acumular de
erros de trajectória (Winter, 2005).
Neste enquadramento, devido à complexidade inerente ao movimento humano, vários
modelos foram desenvolvidos, simplificando essa mesma complexidade e tentando
simultaneamente reproduzir o movimento humano. Townsend e Seireg (Townsend et al.,
1972) desenvolveram um modelo com dois elementos de massa, representando os membros
inferiores humanos e considerando apenas um grau de liberdade em cada articulação na anca
(flexão/extensão). Hemami (Hemami, 1980) propôs um modelo tridimensional dos membros
inferiores, formado por três segmentos e não considerando os pés como base de sustentação,
enquanto Pandy e Berme (Pandy e Berme, 1988) propuseram um método numérico para
simular a dinâmica da marcha humana, através de um modelo bidimensional formado por
cinco segmentos, e também não considerando os pés. Contudo, estes modelos não produziram
respostas suficientemente válidas, devido ao seu grau de simplicidade. Mesmo com modelos
de complexidade superior, muitos investigadores constrangeram cinemáticamente partes do
seu modelo, como por exemplo, assumindo trajectórias sinusoidais para o movimento dos
segmentos corporais relativos ao tronco e à zona pélvica (Becket e Chang, 1968; Chao e Rim,
1973; Townsend, 1981).
Winter e Onyshko (Onyshko e Winter, 1980) modelaram o corpo humano através de um
modelo constituído por sete segmentos corporais (dois pés, duas pernas, duas coxas, e um
segmento do tipo HAT (Head, Arms e Trunk – Cabeça, braços e tronco), mas o modelo em
causa não satisfez os requisitos necessários para uma correcta validação, devido a certos
constrangimentos anatómicos (o modelo foi desenvolvido considerando apenas o plano
sagital). Modelos de maior complexidade foram posteriormente desenvolvidos (Hemami et
al., 1982; Chen et al., 1986), apresentando mais segmentos corporais, maiores graus de

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
13
liberdade em cada articulação, contudo nenhuma validação foi totalmente bem sucedida
(Winter, 2005).
No entanto, movimentos simples foram modelados com sucesso razoável. Philips et al.
(1983) modelaram a oscilação dos membros inferiores humanos usando as acelerações da
anca e os momentos de torção associados. Hemami et al. (1982) modelaram o balanço do
corpo no plano coronal quando as articulações do joelho estão ―trancadas‖ (com momento de
torção nulo e sem movimento de translação).
Uma das principais dificuldades na modelação biomecânica primária residiu na
determinação das condições iniciais óptimas. Estes modelos utilizavam molas de modo a
representar as características dinâmicas da base dos pés, contudo tal resulta numa aceleração
extremamente elevada dos segmentos representativos dos pés, e também apresentam grandes
picos na característica de força de reacção com o solo. Este problema foi resolvido aplicando
uma componente visco-elástica ao modelo do pé, com um conjunto de sistemas mola-
amortecedor em paralelo, por baixo do segmento rígido do pé (Gilchrist e Winter, 1996).
Recentemente, foram desenvolvidos modelos biomecânicos tridimensionais (3D),
apresentando melhores resultados. Surgiram diversas ferramentas de modelação e simulação
computacional, nas quais se destacam o software OpenSim da SimTek, o SIMM da
Musculographics Inc., o ADAMS da MSC Software, entre outros. A Figura ilustra um
modelo 3D constituído por nove segmentos, representando a marcha humana, tendo sido
desenvolvido recorrendo ao software ADAMS.
Figura 2.5 - Modelo 3D de nove segmentos, representando a marcha humana (Gilchrist e
Winter, 1996).

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
14
Este modelo apresentou resultados bastante satisfatórios através da utilização dos
momentos de torção nas articulações como entradas, molas não lineares para modelar as
articulações do joelho, tornozelo e metatarsica-falangeal constrangendo estas articulações à
sua gama anatómica. Foram também utilizados sistemas mola-amortecedor de efeito linear,
modelando a dinâmica das articulações de modo a obter um padrão estável de movimento
(Gilchrist e Winter, 1996). Contudo, este modelo apresentou falhas na simulação após 500
milissegundos devido, ao acumular de erros cinemáticos, resultando no colapso ou queda do
corpo modelado (Winter, 2005).
Estes erros devem-se essencialmente à característica inerente ao cálculo da trajectória
de um determinado segmento, através da dupla integração da sua aceleração. Os momentos de
torção à entrada do modelo, conjuntamente com as forças de reacção, nomeadamente com a
de contacto com o solo, originam erros de trajectória, que aumentam ao longo do tempo e que
apenas podem ser corrigidos através de uma sintonização fina dos parâmetros de entrada do
modelo, neste caso os momentos de torção das articulações (Winter, 2005).
Estes modelos 3D (vd. Figuras 2.6, 2.7 e 2.8) apresentaram um maior grau de
complexidade, pelo que apresentam resultados extremamente bons.
Figura 2.6 - Modelo 3D do membro superior humano, desenvolvido em OpenSim.2
2 (https://simtk.org/home/opensim)

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
15
Figura 2.7 - Modelo 3D constituído por dez segmentos, vinte e três graus de liberdade e
cinquenta e quarto actuadores músculo-tendíneos, desenvolvido em OpenSim (Allison et al.,
2005).3
Figura 2.8 - Modelo 3D do ciclo de marcha humana, desenvolvido em SIMM.4
3 (https://simtk.org/home/opensim)
4 (www.musculographics.com)

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
16
2.3 Síntese da Modelação Neuro-Músculo-Esquelética
Neste capitulo apresentam-se vários desenvolvimentos na área da modelação neuro-
músculo-esquelética. Os modelos aqui apresentados, desde o clássico modelo de Hill ao mais
recente modelo músculo-tendíneo de Zajac, foram fundamentais enquanto linhas condutoras
no desenvolvimento deste trabalho.
Os tópicos aqui apresentados seguem uma ordem especifica, na qual o desenvolvimento
do modelo foi baseado. Desde o desenvolvimento do modelo neuro-muscular e a importância
vital da dinâmica de activação muscular, aos factores de escala enquanto normalizadores da
sua modelação, às propriedades mecânicas dos músculos e modelação mecânica dos
actuadores músculo-tendíneos, foi esta a linha de desenvolvimento seguida, de acordo com a
estruturação hierárquica e biológica do sistema neuro-músculo-esquelético humano.
2.3.1 Modelo de Hill
Hill desde cedo reconheceu que a elasticidade dos tendões afecta também a força gerada
pelo músculo (Hill, 1938; Hill, 1949).
Hill sugeriu que deveria existir um efeito elástico do tipo mola (SE) no músculo (vd.
Figura 2.10), com um comprimento único para cada nível de tensão muscular, e que não
dependesse da velocidade. Este elemento elástico em série deveria corresponder
provavelmente à estrutura e comportamento do tendão, apresentando um valor máximo de
declive na tensão muscular, face a 2 % de variação do comprimento do músculo (Freivalds,
2004).

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
17
Figura 2.9 - Relação Força – Comprimento muscular para um componente elástico em série
(Ritchie, et al., 1958).
As curvas passivas de tensão (vd. Figura 2.9) sugerem que também deveria existir um
elemento elástico em paralelo (PE) que se opunha ao estiramento passivo do músculo. Este
elemento consistia no tecido conjuntivo que se encontrava em paralelo com as miofibrilas
musculares. A relação força – velocidade (i.e., a força muscular é máxima quando a
velocidade é zero) sugere que deveria existir uma resistência dinâmica ao próprio movimento
do músculo e, como tal, a força muscular seria dissipada. Contudo, Hill propôs que um
elemento contráctil (CE) consistia num puro gerador de força com um elemento de
amortecimento (DE) em paralelo (Freivalds, 2004). Todos estes elementos foram depois
combinados no que ficou conhecido como o modelo muscular de quatro elementos de Hill,
(vd. Figura 2.10).
Figura 2.10 - Modelo do tipo Hill descrevendo a dinâmica da contracção do tecido muscular
(adaptado de Zajac, 1989).

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
18
O modelo conceptual do tipo de Hill é caracterizado pelo facto de as propriedades do
tecido muscular poderem ser representadas pela relação força-comprimento-velocidade (flv)
controlada pela activação muscular (vd. Figura 2.10). Basicamente, é constituído por um
elemento passivo em paralelo com um elemento contráctil admitindo que contribuem para a
geração de força muscular Fm
. A força FCE
é assumida como dependendo apenas do
comprimento muscular actual Lm
, da velocidade vm
e da activação muscular a(t). Por vezes, a
componente elástica do músculo, distinguível da elasticidade do tendão, é incluída em série
(SEE) com o elemento contráctil (Zajac, 1989; Cecchi, et al., 1986). O comprimento do CE
resulta da soma dos comprimentos dos γ sarcómeros (vd. Guyton e Hall, 2003) da fibra
muscular (γ.LS) e, difere do comprimento da fibra muscular L
m (Zajac, 1989).
Uma razão para não incluir o elemento elástico SEE no modelo, reside no facto de em
situações contrárias à noção básica de sarcómero e, das fibras musculares actuarem em
harmonia, poder levar a situações desconcertantes em relação a este aspecto. Por exemplo,
com um músculo contendo o elemento SEE, o comprimento da fibra muscular não poderia ser
escalável em situações em que as propriedades dos sarcómeros são estáticas. Na figura 2.10,
pode-se constatar que o comprimento do sarcómero LS multiplicado pelo número total de
sarcómeros γ, corresponde ao comprimento do elemento contráctil. Desta forma, o
comprimento da fibra muscular e dos seus sarcómeros não será proporcional devido ao
estiramento provocado no músculo que contém o elemento SEE. Consequentemente, a relação
força-comprimento (fl) da fibra muscular não será mais que um comprimento escalável
através da relação fl do sarcómero. A relação fl da fibra muscular será por outro lado, uma
distorção da relação fl do sarcómero (Zajac, 1989; Wilkie e Richie, 1958).
Para além destes factos, num músculo com elemento SEE, a velocidade da fibra
muscular não será uma unidade escalável a partir da velocidade do sarcómero. Considere-se
por exemplo, o caso em que as fibras musculares são isométricas (vd. Guyton e Hall, 2003) e
encontram-se inicialmente em repouso. A força muscular irá aumentar gradualmente até ao
seu valor isométrico, correspondente à activação total, uma vez que o comprimento dos
sarcómeros, como é evidenciado no comprimento do elemento CE (γ.LS), torna-se menor à
medida que o elemento muscular SEE alonga. Desta forma, as fibras musculares serão
isométricas (i.e. o comprimento das fibras musculares será constante), contudo o

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
19
comprimento dos sarcómeros será menor (i.e. o comprimento do CE será menor) (Zajac,
1989).
No caso de um tendão e um músculo irem constituir um sistema linear, as propriedades
de tal sistema poderão ser indistinguíveis das propriedades de um modelo muscular contendo
apenas o elemento em série SEE. Por outro lado, a rigidez muscular terá de ser modelada
quando os actuadores de encurtamento do tendão forem submetidos a variações rápidas de
comprimento. A razão principal deve-se ao facto de o regime transitório da força ser
fortemente dependente da rigidez muscular. Contudo, a modelação da rigidez ou de
movimentos em que regimes transitórios rápidos desempenham um papel importante (por
exemplo, na coordenação muscular durante uma corrida), deverão provavelmente conduzir a
modelos de maior complexidade do que o simples modelo de Hill (Zajac, 1989).
2.3.2 Modelo de Zajac
Uma das versões mais interessantes do modelo de Hill é a formulada por Felix E. Zajac.
Possui diversas qualidades que o tornam conveniente para simulações da dinâmica do sistema
músculo-esquelético. A sua principal característica é a importância que assume a mecânica do
tendão, como vínculo mecânico entre o elemento contráctil do músculo e a força exercida
entre as extremidades do músculo (Zajac, 1989). Outro aspecto interessante é a sistematização
que consegue realizar, partindo de relações genéricas força-velocidade, força-deslocamento e
de rigidez no tendão. Todas as variáveis de entrada: activação muscular, velocidade e
comprimento do actuador músculo-tendíneo, e resposta: força na extremidade do tendão,
encontram-se adimensionalizadas.
Conhecendo-se o comprimento óptimo, a velocidade máxima de encurtamento do
elemento contráctil sem carga, a força máxima isométrica e o comprimento do tendão
relaxado, podem ser utilizadas relações genéricas da dinâmica de activação e de contracção. A
Figura 2.11 apresenta o diagrama de blocos para um actuador músculo-tendíneo genérico,
segundo a proposta de Zajac. Numa determinada operação de um membro, por exemplo a
flexão do cotovelo, um músculo sofre um processo de encurtamento: pode-se observar a
variação do comprimento e da velocidade do músculo, a partir de um dispositivo de medição
adequado (como por exemplo, um extensómetro). O grau de activação muscular a(t) é obtido
por uma filtragem passa-baixo do sinal de excitação neuronal u(t), estimável a partir do

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
20
registo electromiográfico do músculo (vd. subcapítulo 2.3.4). Subtraindo da velocidade de
encurtamento do actuador músculo-tendíneo a velocidade do musculo é obtida a velocidade
de encurtamento do tendão; multiplicando este valor pela rigidez do tendão, é encontrada a
derivada temporal da força no tendão, integrada de seguida. Se o ângulo de inclinação das
fibras musculares α(t) for desprezável, a força muscular é a mesma do tendão, podendo ser
utilizada para estimar a velocidade do músculo.
Figura 2.11 - Diagrama de blocos do modelo de Zajac (adaptado de Zajac, 1989).
2.3.3 Modelo do Par Excitação – Contracção
A informação contida na excitação neuronal da unidade motora encontra-se contida na
sequência de descargas que ocorrem nestas unidades. Uma vez que a descarga efectuada pelas
fibras musculares enervadas ocorre em sincronia entre si e entre as descargas efectuadas pela
fibra neuronal e as suas ramificações, esta excitação do tecido neuronal e muscular é
denominada de excitação neuromuscular ou simplesmente excitação neuronal.
A excitação neuronal u(t) encontra-se acoplada à unidade motora através de uma
variável intermédia denominada activação muscular a(t) sendo, por definição, idêntica à
noção original de ―estado activo‖ (Hill, 1938; Hill, 1949) do modelo de Hill. O par excitação-
contracção (EC) é mediado pela dinâmica cálcica (Huxley et al., 1974; Zahalak et al., 1988).
A cinética associada ao processo intracelular da activação do cálcio e desactivação da unidade
contráctil é geralmente aproximada por uma dinâmica de primeira ordem de modo a simular
(de forma lenta) a reacção químico-cinética dominante do par EC (Taylor, 1969). Uma

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
21
característica importante da dinâmica de activação do para EC é a taxa de activação
neuromuscular ser superior à de desactivação (Zajac, 1989).
Virtualmente, todos os modelos utilizados no estudo da coordenação de segmentos do
corpo assumem que a dinâmica de activação está desacoplada da subsequente geração de
força (i.e. dinâmica da contracção muscular). Contudo, alguns estudos in vivo sugerem que o
acoplamento do par EC e da mecânica das pontes-cruzadas (vd. Guyton e Hall, 2003), através
do tecido muscular, não está devidamente clarificado e longe de estar resolvido. Por uma
questão de simplicidade, assume-se que a dinâmica de activação e de contracção muscular se
encontram desacopladas (Zajac, 1989).
2.3.4 Associação entre a Activação Muscular e a Força Isométrica
O registo da força isométrica do músculo activo, é sempre um meio de medição da
activação muscular, específica de uma determinada excitação neuronal. Num modelo
desprovido do elemento SEE, a força muscular variante no tempo FCE
(t) é função de a(t),
vm
(t) e de Lm
(t) (vd. Figura 2.10). Numa contracção isométrica, Lm
é constante e vm
é nula.
FCE
(t) é então, dada apenas pela excitação variante no tempo a(t). Uma vez que a(t) é
assumida como medida de escala da curva muscular activa e isométrica fl, e Lm
é constante, a
força muscular activa FCE
(t) é proporcional à activação muscular a(t), numa contracção
isométrica (Zajac, 1989).
Contudo, se o modelo incluir o elemento SEE, FCE
(t) deverá retardar com a(t). Uma vez
dada esta correspondência entre força isométrica e activação muscular, a activação muscular
constitui uma função complexa da sequência de pulsos neuronais. A razão pela qual isso
acontece prende-se com o facto de depender de forma complexa das excitações passadas,
constituído um sistema causal. Contudo, modelos não lineares do par EC baseados na
dinâmica cálcica, podem modelar muitas destas propriedades referenciadas (Demieville et al.,
1980; Zajac, 1989).
A partir da associação entre activação muscular e força muscular isométrica,
experiências realizadas em diferentes músculos, através de dispositivos de medição FES,
permitiram concluir que o registo da força não representa a activação do músculo, mas sim,
devido ao encurtamento da fibra muscular, um filtro passa-baixo da activação (Zajac, 1989).

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
22
2.3.5 Modelos Musculares do Tipo SISO
Idealmente, um modelo muscular deve ter em conta as características individuais das
unidades motoras. Apesar de tudo, são as descargas dos neurónios motores individuais que
excitam as unidades motoras individuais, que por sua vez geram de forma colectiva, a força
muscular. Nenhuma representação complexa do músculo foi utilizada no desenho de modelos
para o estudo da coordenação motora, nem tal complexidade é justificada (Zajac, 1989). De
facto, muito poucos trabalhos experimentais foram desenvolvidos com vista a testar o
conceito, de que a soma das forças desenvolvidas por cada uma das unidades motoras, produz
força muscular (Winter, 2005). De forma similar, muito poucos modelos foram desenvolvidos
com o intuito de estudar a integração da capacidade de geração de força muscular por parte
das unidades motoras, que por sua vez são simultaneamente controladas (excitadas) pelos
dessincronizados trens de pulsos nervosos. Também não é usual encontrar modelos que
estimem a força colectiva de saída do músculo, sendo esta composta por diferentes tipos de
unidades motoras, todas ou na sua maior parte, completamente excitadas (a(t) = 1).
A maior parte dos modelos musculares utilizados em estudos computacionais são do
tipo SISO (Single Input-Single Output), ou seja, uma entrada e uma saída. Muitos desses
modelos assumem que grande parte do sistema pode ser adequadamente representado por uma
dinâmica de primeira ordem, associado à dinâmica de contracção. Desta forma, a excitação
neuronal u(t) actua através de uma dinâmica de activação de primeira ordem de modo a
produzir uma rede de activações musculares a(t).
Esta relação flv, em conjunto com a elasticidade do tendão, estabelece uma dinâmica
músculo-tendínea de primeira ordem. Uma vez que a componente SEE é excluída, o tendão
deve ser incluído na dinâmica de contracção muscular de modo a torná-la uma dinâmica de
primeira ordem. Caso o músculo contenha uma componente SEE, esta dinâmica deve ser
incluída no processo, mesmo que não haja dinâmica tendínea. Caso contrário, a dinâmica de
contracção muscular é mais uma vez de primeira ordem e o termo dinâmica de contracção
músculo-tendínea ainda será significativo (Zajac, 1989).
As principais razões para a utilização de um modelo muscular do tipo SISO são:

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
23
1. As dinâmicas que descrevem a actividade motora tornam-se de dimensão
elevada. Para um modelo muscular de segunda ordem, o número de variáveis
de estado é (2m+2n), onde m é o número de músculos e n o número de graus
de liberdade do sistema mecânico utilizado para o modelo da coordenação. A
interpretação dos dados provenientes da simulação, aliados a este número de
variáveis de estado, representa um grande desafio intelectual e o tempo de
computação é tanto maior quanto maior for (m+n) (Zajac, 1989).
2. As variáveis de estado associadas à força desenvolvida pelos músculos (i.e. Fm
ou, de forma equivalente, a força tendínea) podem ser comparadas com as
forças calculadas a partir de dados experimentais. Por exemplo, a rede de
momentos de força associados a cada junta, produzidos a partir dos actuadores
que ―cruzam‖ essa mesma junta, podem ser calculados a partir da análise da
dinâmica inversa dos dados biomédicos experimentais (Gottlieb et al., 1970).
Esta rede de momentos de força muscular pode ser comparada com os
momentos de força obtidos a partir de simulações da actividade motora, que
deve conter tanto um modelo para a força desenvolvida por cada actuador
como um modelo para cada um dos braços de força (i.e. modelo da geometria
músculo-esquelética) (Zajac, 1989; Hof et al., 1987).
3. A variável de estado associada à activação muscular a(t) e a excitação neuronal
de entrada u(t) pode também ser relacionada com dados experimentais. Por
exemplo, registos experimentais de EMG podem ser processados para
comparação com a excitação muscular e os sinais de activação. Os envelopes
dos sinais EMG rectificados e filtrados, podem ser comparados com u(t) e a(t)
respectivamente (Zajac, 1989; Hof et al., 1987; Gottlieb, et al., 1971). Uma
dinâmica de primeira ordem pode ser utilizada para representar o processo de
activação-EMG, incluindo uma equação diferencial bilinear:
(2.1)
0 < β = const. < 1

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
24
onde:
τact, tempo de activação (quando o músculo está completamente excitado
u(t) = 1).
(2.2 a, b)
τdesact = τact / β, tempo de desactivação (quando o músculo está
desactivado u(t) = 0, com 0 < β = const. < 1
De notar que a taxa associada à dinâmica de
primeira ordem depende da excitação u(t), quando u(t)>0. Contudo, quando o
músculo se encontra totalmente excitado (u(t) = 1), a dinâmica de activação é
assumida como sendo mais rápida quando a taxa constante é de 1 / τact, e é
mais lenta quando u(t) = 0, o que acontece apenas quando a taxa é β / τact. De
forma equivalente, este modelo assume que a constante de tempo responsável
pelo aumento da activação de um músculo completamente excitado (τact) é
menor que a constante de tempo de um músculo completamente relaxado
(τdesact). Desta forma, β é o parâmetro que especifica o rácio entre estas duas
constantes de tempo. Uma vez que a activação e a força isométrica são
proporcionais, uma das consequências deste modelo é a força isométrica activa
aumentar de forma mais rápida, durante a excitação do músculo, do que
decresce durante o seu tempo de relaxamento (Zajac, 1989).
Figura 2.12 - Associação entre a activação muscular e a actividade electromiográfica (EMG)
num modelo muscular do tipo SISO (Zajac, 1989).

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
25
A actividade electromiográfica em bruto aumenta, tanto com a taxa de disparo das
unidades motoras individuais, como com as unidades inactivas que são recrutadas para o
estado activo. A rectificação do sinal EMG em bruto pode ser considerado como sendo a
excitação neuronal do músculo u(t), tendo em conta todas as unidades individuais (Σui(t)).
Filtrando o sinal EMG rectificado, obtém-se a rede de activações musculares (Σai(t)), pelo que
as características de um filtro passa-baixo correspondem à dinâmica de activação (Zajac,
1989).
2.3.6 Factores de Escala na Modelação Muscular
Existem diversas maneiras de se estudar a coordenação muscular, e tal como na
modelação de sistemas de grande escala, compromissos entre a simplicidade e complexidade
na estrutura dos modelos, e entre alguns parâmetros, devem ser realizados. De modo a se
compreender de que forma é que os músculos afectam a coordenação dos segmentos do
corpo, alguns segmentos, em particular, devem ser estudados, incluindo os respectivos
músculos associados. Para que a interacção dos segmentos corporais e respectivos músculos
seja garantida, deverá ser desenvolvido um modelo muscular genérico em que a sua escala
seja definida a partir de uma série de parâmetros representativos de um determinado músculo.
De acordo com as razões acima indicadas, torna-se razoável a formulação de um modelo
genérico do tipo SISO, baseado nas seguintes propriedades materiais do músculo:
1. Factores de escala da curva força-deslocamento do músculo passivo;
2. Factores de escala da curva força-deslocamento do músculo activo;
3. Factores de escala da curva força-velocidade;
4. Factores de escala da equação de primeira ordem que expressa a dinâmica de
activação (2.1).

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
26
Com esta formulação, os parâmetros específicos dos músculos necessários à definição
de uma escala dimensional das propriedades materiais acima descritas, de forma a gerar as
propriedades estruturais e dinâmicas do músculo, são:
1. O pico da força isométrica do músculo activo (F0m
);
2. O comprimento óptimo da fibra muscular (L0m
);
3. O ângulo de ―inclinação‖ óptimo da fibra muscular (α0), quando Lm
= L0m
;
4. A velocidade máxima de encurtamento do músculo vm, normalizada através de L0m
( ), onde:
(2.3)
é denominada de velocidade muscular normalizada em relação ao comprimento
óptimo da fibra muscular L0m
e:
(2.4)
é denominado de parâmetro de escala temporal, com unidades em segundos.
Um parâmetro de tempo dimensional pode ser definido a partir de 2.2:
(2.5)
Desta forma, o eixo da velocidade da curva fv é normalizada a partir de
, assim como a força muscular é normalizada a partir de F0
m e o eixo do comprimento da
curva fl é normalizado a partir de L0m
(Zajac, 1989). Desta mesma forma, as constantes de

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
27
tempo de activação e de desactivação, assim como a dinâmica da activação muscular podem
ser normalizadas a partir do parâmetro de escala temporal τc (Zajac, 1989):
, tempo de activação dimensional.
(2.6 a, b)
, tempo de desactivação dimensional.
Substituindo 2.5 e 2.6 em 2.1, obtém-se:
(2.7)
0 < β = const. < 1
Em que constitui o rácio entre estas duas constantes temporais (Zajac,
1989).
2.3.7 Modelação Mecânica dos Tendões
O tendão consiste numa porção externa do músculo esquelético (tendão externo) e,
numa porção interna do músculo esquelético (tendão interno), como ilustra a figura 2.13. Este
pode ser definido a partir da sua secção transversal AT e do seu comprimento L
T, dependendo
por sua vez da elasticidade εT e tensão σ
T na sua secção transversal (Zajac, 1989)
Figura 2.13 – Relação entre as fibras musculares com um ângulo de inclinação α e o tendão
(Zajac, 1989).

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
28
A elasticidade do tendão εT pode ser definida como o rácio entre a variação de comprimento
do tendão ΔLT e a quantidade de redução de comprimento do tendão, face à sua posição de
repouso LT
S (―slack lenght‖) (Zajac, 1989):
(2.8)
A tensão do tendão σT é definida pela força gerada F
T por secção transversal tendínea
AT:
(2.9)
Dados laboratoriais sugerem que a mesma tensão muscular é experimentada tanto pelo
tendão interno como externo (Alexander et al., 1977). Em vários modelos desenvolvidos para
o tendão a sua elasticidade é combinada com a elasticidade do próprio músculo (i.e. a
componente muscular SEE). As expressões e parâmetros definidos para a elasticidade
músculo-tendínea são tipicamente baseados em estudos do músculo ―como um todo‖ (Zajac,
1989).
Do ponto de vista mecânico, um tendão pode ser modelado como um sistema elástico
ou visco-elástico, considerando apenas o efeito equivalente a uma mola elástica. Contudo, na
modelação dos tendões, estes apresentam curvas força – comprimento completamente
desconhecidas. Zajac no seu modelo (Zajac, 1989) propôs que essas curvas poderiam ser
desprezadas considerando apenas uma curva genérica de força – tensão, que poderia ser
escalada através de dois parâmetros específicos, referentes ao actuador músculo – tendíneo
(i.e. a força muscular isométrica FT
0 e o “slack length” LT
S). Esta relação poderia ser
formulada tendo em conta duas suposições (Zajac, 1989):
1. Poder-se-ia assumir que a relação nominal e independente força – tensão era
baseada nas propriedades materiais do tendão (vd. Figura 2.14 A);

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
29
2. Por outro lado, o alongamento do tendão quando a força que produzia era igual à
força muscular isométrica (denominando este alongamento de εT
0), poder-se-ia
assumir como independente do conjunto músculo – tendão. Esta situação também
poderia ser assumida ao nível da tensão do tendão (σT
0), (vd. Figura 2.14 A onde σT
= 32 MPa quando εT = ε
T0 = 0,003, que ocorre quando F
T = F
T0).
Uma implicação destas duas suposições é a de que o rácio entre a área seccional do
tendão e a área fisiológica do músculo esquelético são independentes (Zajac, 1989). Uma vez
determinados os valores de εT
0 e de σT
0, é possível determinar uma curva genérica força –
elasticidade a partir da curva característica elasticidade – tensão do tendão utilizando para tal
o valor de tensão do tendão normalizado em relação a σT
0 (comparando as figuras 2.14 A e B).
Desta forma para se obter uma curva relacional entre força – comprimento de um tendão, a
partir da sua relação força – elasticidade, é dimensionado em relação a F m
0, uma vez que
e, εT é dimensionada em relação a L
TS, uma vez que (Zajac,
1989).
Figura 2.14 – Propriedades materiais dos tendões. (A) Relação nominal tensão – elasticidade e;
(B) relação dimensional tensão - elasticidade (Zajac, 1989).
Segundo estudos efectuados (Bobbert et al., 1986; Rack et al., 1984; Bennet et al.,
1986), os valores óptimos para εT
0 e σT
0, deverão ser de 3.3% (num intervalo de 2 a 9%) e de
32 MPa (num intervalo de 14 a 84 MPa), respectivamente (Zajac, 1989).

CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
Página
30
2.3.8 Modelação Mecânica do Actuador Músculo - Tendíneo
Apesar de o músculo e de o tendão poderem ser estudados em separado, assim como as
suas propriedades individuais, músculo e tendão funcionam em conjunto de modo a produzir
um determinado movimento motor (Zajac, 1989). É a sua função conjunta que constitui o
actuador músculo – tendíneo. Fisiologistas, entre eles Hill, reconheceram que a determinação
das propriedades contrácteis do tecido muscular dependia, em certa medida, da elasticidade
dos tendões na produção de força muscular (Hill, 1938; Hill, 1949).
Os músculos e tendões não só funcionavam em conjunto como um actuador (vd. Figura
2.15 A), mas também funcionavam em conjunto com as dinâmicas dos segmentos corporais
(Zajac, 1989). A razão pela qual os segmentos corporais se movem deve-se ao facto de a
capacidade de geração de força do actuador músculo-tendíneo ser afectada pelo comprimento
LmT
e velocidade vmT
, que por sua vez depende da posição e movimento dos segmentos. Desta
forma, a cinemática dos segmentos corporais depende da força FT de cada actuador. Assim,
músculo, tendão e segmentos corporais, constituem um sistema retroactivo com múltiplas
entradas e múltiplas saídas (MIMO), (vd. Figura 2.15 A), (Zajac, 1989).
O tendão interage apenas no processo de contracção do tecido muscular, não
interagindo no processo de activação muscular, uma vez que a activação é assumida como
estando desacoplada dos eventos mecânicos subsequentes ao tendão. A função combinada de
contracção do par músculo – tendão é especificada por uma dinâmica integral (vd. Figura 2.15
B). De notar que, o comprimento LmT
e a velocidade vmT
do actuador músculo – tendíneo bem
como a força do tendão FT
(vd. Figura 2.15 B), afectam apenas a dinâmica de contracção do
actuador músculo – tendíneo, pelo que a dinâmica de activação muscular deve ser analisada
de forma separada (Zajac, 1989).
Deste modo, a dinâmica de contracção deste actuador é dada pela interacção entre a
dinâmica de contracção muscular e a flexibilidade do tendão. Quando a flexibilidade do
tendão é elevada, a força gerada à saída causa uma retroacção significativa no processo de
geração de força por parte das fibras musculares (vd. Figura 2.15 C). Esta retroacção é
possível, uma vez que tanto o comprimento LT como a velocidade v
m não constituem meros

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
31
reflexos do comprimento LmT
e velocidade vmT
do actuador músculo – tendíneo, mas sim,
diferem do comprimento LT e velocidade v
T do tendão (Zajac, 1989).
Figura 2.15 – Diagrama de blocos ilustrando a interacção entre o tendão e o músculo, na
geração de força. (A) Funcionamento conjunto entre os actuadores músculo – tendíneos e os
segmentos corporais, (B) Dinâmica do actuador (C) Dinâmica de contracção do actuador
músculo – tendíneo (adaptado de Zajac, 1989).

Página
32
CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSCULO-ESQUELÉTICO
“A model is an attempt to represent reality”5
Os modelos são uma constante na vida humana na medida em que tentam aproximar
uma realidade complexa com a qual o ser humano não consegue lidar por si só, recorrendo
desta forma a modelos que simplifiquem essa mesma complexidade.
A construção de modelos requer dois tipos de informação: o conhecimento do sistema
que se pretende modelar e os dados experimentais que constituem as entradas e saídas desse
mesmo sistema. Um dos aspectos mais importantes em modelação é decidir o que pode ser
negligenciado, ou seja, ou que pode ou não ser incluído no modelo sem comprometer o
resultado final (Benno e Walter, 2003).
Um modelo providencia informação acerca da relação entre causa e efeito podendo ser
utilizado de duas formas: directa ou indirecta. Na sua forma directa, o modelo parte da causa
para o efeito e reside tipicamente numa solução conclusiva. Na sua forma indirecta, parte do
efeito para a causa e reside tipicamente numa solução inconclusiva, na medida em que se
obtêm várias soluções (Benno e Walter, 2003). Os modelos podem ser classificados por um
lado como intuitivos ou abstractos (Fischbein, 1987; Benno e Walter, 2003) e, por outro lado
indutivos ou dedutivos (Kemeny, 1959; Benno e Walter, 2003).
A taxionomia utilizada em modelos biomecânicos assenta em quatro grupos: modelos
analíticos ou de caixa branca, modelos semi-analíticos ou de caixa cinzenta, modelos não-
analíticos ou de caixa-preta, e modelos conceptuais. Neste presente trabalho foram apenas
desenvolvidos modelos de base analítica (―caixa-branca‖), uma vez que são os fenómenos
biofísicos que regem o comportamento do sistema neuro-músculo-esquelético.
5 Benno M. Nigg and Walter Herzog, “Biomechanics of the Musculo-skeletal System
Second Edition”, John Wiley & Sons, pp. 435, 2003

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
33
3.1 Contextualização
Partindo do objectivo primordial deste trabalho, foi desenvolvido um modelo do sistema
neuro-músculo-esquelético humano, do tipo caixa branca, aplicado à anatomia fisiológica do
membro superior humano.
Para o desenvolvimento de um modelo neuro-músculo-esquelético fidedigno foi
estudada e respeitada a estrutura hierárquica do sistema neuro-músculo-esquelético ao nível
da espinal medula (vd. Figura 3.1), de modo a proporcionar a adaptação e estabilidade
desejadas para este sistema.
Os dados de simulação obtidos neste modelo, foram validados segundo um padrão de
dados experimentais obtidos em laboratório (laboratório de biomecânica – Departamento de
Física, da Faculdade de Ciências e Tecnologia da Universidade Nova de Lisboa), através de
electromiografia e goniometria realizados num único indivíduo do sexo masculino, raça
caucasiana, 24 anos de idade e com um peso médio de 80 quilogramas, conforme será
discutido no capítulo 3.4.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
34
Figura 3.1 – Estrutura hierárquica do sistema neuro-músculo-esquelético ao nível da espinal
medula (adaptado de Jinping et. al, 2001).
O modelo de Hill foi tido em conta numa primeira fase de estudo, contudo devido às
considerações discutidas no capítulo 3 foi adoptado a formulação neuro-muscular de Zajac,
permitindo a construção de um modelo mais fidedigno. A arquitectura do modelo
desenvolvido neste trabalho, assim como as considerações anatómicas e fisiológicas tidas em
conta para o seu desenvolvimento, serão discutidas nos subcapítulos seguintes.
3.2 Anatomia do Braço Humano
O membro superior humano é composto por três grupos de mecanismos que permitem o
seu movimento rotacional e translacional: o ombro, o cotovelo e o pulso. A sua associação

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
35
permite uma gama de movimentos combinados, e confere ao braço humano a maior
mobilidade de todo o corpo humano.
Devido à complexidade da mão humana, a sua biomecânica não foi considerada, pelo que a
mão foi tida como um elemento de massa rígido na extremidade do antebraço, não tendo em
conta o complexo articular e muscular associado ao pulso. Considerando toda a complexidade
esquelética do braço humano passa-se a enumerar as suas sete principais articulações (não
considerando a zona da mão):
1. Articulação externo-clavicular que articula a extremidade da clavícula e do externo;
2. Articulação acromio-clavicular que liga a clavícula à apófise acromial da escápula;
3. Articulação escapulo-toráxica que permite que a escápula deslize no tórax;
4. Articulação gleno-umeral, que permite que a cabeça do úmero rode na fossa glenóide
da omoplata;
5. Articulações ulno-umeral e umero-radial que articulam ambas as extremidades distais
do úmero e da ulna, na região do antebraço, e finalmente a articulação ulno-radial
onde ambas as extremidades distais da ulna e do rádio se encontram (Kapandji, 2007).
Estas sete articulações formam duas zonas capsulares denominadas articulação do ombro
e cotovelo. Foram estas as duas zonas articulares estudadas e tidas em consideração no
modelo bidimensional desenvolvido.
3.2.1 Articulação do ombro
O ombro não é uma articulação única, mas sim um conjunto funcional que permite unir
o membro superior ao tórax (Kapandji, 2007) (vd. Figura 3.2).
Tal conjunto assegura-se através de uma dupla função:
1. Mobilidade com grande amplitude do braço;
2. Boa estabilidade.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
36
O ombro é constituído por um conjunto de quatro articulações (externo-clavicular,
acromio-clavicular, escapulo-toráxica e gleno-umeral), que funcionam em sinergia para
posicionar o membro superior no espaço ao nosso redor, para fixá-lo rigidamente, contra o
gradil costal nos momentos em que elevamos um objecto pesado ou nos apoiamos sobre os
braços de modo a regular a aceleração e a desaceleração do deslocamento angular do braço
quando atiramos uma pedra ou nadamos, e para uma série infindável de outros gestos
(Kapandji, 2007).
De entre as cinco articulações do ombro, três são do tipo sinovial (possuem uma camada
de cartilagem nas suas superfícies articulares, nutrida pelo líquido sinovial (espécie de óleo
lubrificante), permitindo a estabilidade e distribuição das cargas sobre as superfícies com
redução de metade do stress de contacto) e duas são do tipo "mecanismo articular" que, apesar
de não contarem com as características anatómicas próprias de uma articulação, funcionam,
do ponto de vista biomecânico, como articulações importantes entre os segmentos da cintura
escapular (Kapandji, 2007). A amplitude de movimentos conseguida pelo conjunto articular
do ombro é a seguinte:
1. Extensão do ombro - 45º a 50º;
2. Flexão do ombro - 180º (amplitude total do ombro);
3. Rotação interna do ombro - 95º (ultrapassa um pouco 90º);
4. Rotação externa do ombro - 80º (não atinge 90º).
O ombro pode movimentar o braço em círculo completo e quando isso acontece outras
articulações também intervêm, como por exemplo a acromio-clavicular. Por ser a articulação
que mais se movimenta, o ombro é também o mais instável e por isso mais favorável a lesões
(Kapandji, 2007).

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
37
Figura 3.2 – Articulação do ombro. 6
3.2.2 Articulação do cotovelo
O cotovelo é um dos elos da cadeia biocinemática do membro superior humano (vd.
Figura 3.3), realizando a junção mecânica entre o braço e o antebraço. Esta articulação
permite, em colaboração com o ombro, levar a mão a posições mais ou menos distantes do
corpo, em uma acção de ampla varredura tridimensional (Kapandji, 2007). Os constituintes
ósseos da articulação do cotovelo são o úmero, proximalmente e a ulna e o rádio, distalmente.
Estes ossos formam três articulações:
1. Articulação ulno-umeral e umero-radial, que possibilitam o seu movimento de Flexo-
Extensão;
2. Articulação ulno-radial, que, em conjunto com a úmero radial, possibilita o
movimento de Prono-Supinação (nomes específicos para as rotações nesta articulação)
(Kapandji, 2007).
Estas três articulações são envolvidas por apenas uma cápsula articular - cotovelo. São
dois os graus de liberdade abrangidos por esta articulação (Kapandji, 2007):
6 http://www.scoi.com/sholanat.htm - Southern California Institute website

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
38
1. Flexo-Extensão, no plano sagital e segundo um eixo transversal envolve a
articulação do úmero com os dois ossos do antebraço, caracterizando uma
articulação em forma de dobradiça. Por flexão do cotovelo entende-se a diminuição
do ângulo entre o antebraço e o braço superior, com a aproximação da superfície
anterior dos mesmos, partindo da posição anatómica. A amplitude deste movimento
é de aproximadamente 145º numa contracção muscular activa (voluntária) dos
músculos flexores e de 160º numa forma passiva de movimentação dos segmentos
em questão;
2. Prono-Supinação, no plano transversal, segundo um eixo longitudinal. Envolve
aparentemente apenas a ulna e o rádio, mas há ainda a participação da articulação
umero-radial, do tipo trocóide ou pivô, que possibilita a rotação do rádio em torno
da extremidade do úmero.
Figura 3.3 – Articulação do cotovelo: vista posterior e lateral. 7
7 http://www.scoi.com/sholanat.htm - Southern California Institute website

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
39
3.2.3 Estrutura Muscular
De modo a proporcionar toda a mobilidade inerente ao braço humano, este está
equipado com cerca de 22 actuadores musculares, alguns dos quais subdivididos em grupos
paralelos que se encontram ligados a determinados ossos. Estes podem ser divididos, ainda,
em diversos grupos de acordo com os ossos que movem e os graus de liberdade que
controlam (Maurel, et al., 1996).
Neste trabalho não foram considerados todos os 22 actuadores musculares do braço
humano, mas sim apenas dois pares de músculos antagonistas: um par relativo à articulação
do ombro e um par relativo à articulação do cotovelo, de modo a se atingir o padrão de
movimentos desejado. O padrão de movimentos pretendido foi o de flexão-extensão do
cotovelo, e de abdução, flexão-extensão horizontal, rotação lateral e medial ao nível da
articulação do ombro, assim como garantir a sua estabilização.
No caso da articulação do ombro foram considerados os músculos deltóide anterior e
posterior (vd. Figura 3.4), na medida em que permitem a abdução do braço, auxiliando nos
movimentos de flexão, extensão, rotação lateral e medial, flexão e extensão horizontal do
braço, assim como a estabilização da articulação do ombro. A sua inserção proximal (vd.
Guyton e Hall, 2003) ocorre em cerca de um terço da extremidade anterior da clavícula,
acrómio e escápula, enquanto a sua inserção distal ocorre na zona da tuberosidade deltóidea –
úmero (Freivalds, 2004).
Figura 3.4 – Deltóide anterior.8
8 http://www.auladeanatomia.com/sistemamuscular/ombro.htm

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
40
Quanto à articulação do cotovelo foram considerados os músculos bicípete braquial e o
tricípete braquial. A inserção proximal do bicípete braquial ocorre no tubérculo supra-
genoidal (porção longa) e no processo coracóide (porção curta), enquanto no caso do tricípete
braquial a sua inserção proximal ocorre no tubérculo infra-glenoidal (porção longa), a metade
distal da face posterior do úmero (porção medial) e metade proximal da face posterior do
úmero (porção lateral) (Freivalds, 2004).
O bicípete braquial (vd. Figura 3.5) foi utilizado uma vez que permite a flexão do
cotovelo/ombro e movimento de supinação do antebraço, enquanto o tricípete braquial (vd.
Figura 3.6) foi utilizado pois permite a extensão do cotovelo. As inserções distais do bicípete
e tricípete braquial são na região da tuberosidade radial e no olécrano, respectivamente
(Freivalds, 2004).
Figura 3.5 – Bicípete braquial. 9
Figura 3.6 – Tricípete braquial. 10
9 http://www.auladeanatomia.com/sistemamuscular/braco.htm
10 http://www.auladeanatomia.com/sistemamuscular/braco.htm

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
41
3.3 Arquitectura do Modelo
Foi tido como objectivo principal deste trabalho construir todo um modelo analítico,
não recorrendo a dados experimentais numa primeira fase, que descrevesse as características
tanto estáticas como dinâmicas e sinergias do sistema neuro-músculo-esquelético, associado
ao membro superior humano, tendo em vista o seu movimento voluntário. Sumariamente,
(como será descrito em pormenor nos subcapítulos seguintes) para a modelação do sistema
neuro-músculo-esquelético foi tido em conta, para além das considerações anatómicas, toda
a taxionomia referente aos reflexos e controlo motor humano.
Baseado na fisiologia deste sistema, foi possível modelar a contracção do sistema
músculo-esquelético com base na activação sequencial (ou recrutamento) das unidades
motoras alfa e gama, para tal estudando as dinâmicas de recrutamento das mesmas. Incluiu-
se o processo de co-activação alfa-gama como base da estimulação das fibras motoras (vd.
Guyton e Hall, 2003), de modo a garantir uma boa modelação da dinâmica de activação
muscular. Uma vez que os sinais de excitação, provenientes das unidades motoras são
regulados por uma série de reflexos sensoriais, para além dos centros de geração supra-
espinais, foram modelados o efeito inibitório das células de Renshaw (vd. Guyton e Hall,
2003), o reflexo proveniente dos órgãos tendinosos de Golgi (vd. Guyton e Hall, 2003),
assim como o reflexo de extensão e de inibição do músculo, associado ao fuso muscular. Do
ponto de vista da modelação muscular, foram tidas em conta as propriedades mecânicas do
tecido muscular, nomeadamente as relações força-comprimento e força-velocidade
musculares, associadas às dinâmicas do actuador músculo-tendíneo. Os ganhos associados a
estes reflexos são presumidamente ajustados pela unidade de controlo supra-espinal.
Os movimentos obtidos (vd. Subcapítulo 3.4.) são simulados no plano bidimensional,
com ou sem aplicação de forças externas. As dinâmicas neuro-músculo-esqueléticas são
separadas em blocos funcionais, correspondentes a cada um dos dois pares de músculos
antagonistas que constitui o modelo anatómico. Por uma questão de simplicidade o
formalismo sistémico, a seguir descrito, irá ser generalizado apenas para um par de
músculos antagonistas, pelo que as dinâmicas são as mesmas para os outros grupos
musculares, mudando apenas os valores dos parâmetros presentes nessas mesmas dinâmicas
(vd. Quadro 3.1), como será demonstrado no subcapítulo 3.4. aquando da simulação do
modelo.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
42
O diagrama de blocos da figura 3.7 ilustra a estrutura adoptada para a modelação do
sistema neuro-músculo-esquelético:
Figura 3.7 – Diagrama de blocos do sistema neuro-músculo-esquelético baseado na co-
activação alfa – gama.
A espinal medula recebe como entradas, os comandos provenientes do recrutamento das
unidades motoras, os comandos alfa provenientes dos grandes neurónios motores alfa e os
comandos gama provenientes dos pequenos neurónios motores gama. Os comandos de
excitação descendentes (uma vez que provêm do SNC) são transformados em variáveis de
controlo muscular, por meio dos motoneurónios alfa, de modo a produzir um determinado
padrão de movimento. A informação periférica tal como a velocidade e comprimento das
fibras musculares aquando da sua contracção, retorna à espinal medula de modo a regular as
actividades futuras dos neurónios motores.
Modelou-se geometricamente, no plano bidimensional/sagital (XY), o sistema
bidimensional composto pelas articulações do ombro e do cotovelo, assim como os dois pares
de músculos antagonistas inseridos nas mesmas – deltóide anterior e posterior e, bicípete e
tricípete braquial, como ilustra a figura seguinte:

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
43
F1 1
θ1
Deltóide
Anterior
θ2
F1 2
E1 1
E1 2
E2 2
E2 1
F2 2
F2 1
Deltóide
Posterior
Tricípede
Braquial
Bicípede
Braquial
Y
X
Figura 3.8 – Representação geométrica bidimensional (X0Y) do sistema formado pelas duas
articulações (ombro e cotovelo) e pelos dois pares de músculos esqueléticos antagonistas
(bicípete braquial, tricípete braquial, deltóide anterior e deltóide posterior), (adaptado de Lan,
2002).
Na figura anterior, θ1(t) e θ2(t)são os ângulos formados pelas articulações do cotovelo e
ombro, respectivamente, aquando do movimento bidimensional do braço modelado. Os
pontos (F1 1; F1 2), (E1 1; E1 2), (F2 1; F2 2) e (E2 1; E2 2), correspondem aos pontos de origem e
inserção dos músculos bicípete braquial, tricípete braquial, deltóide anterior e deltóide
posterior, respectivamente. Analisando, por uma questão de simplicidade e de analogia, uma
única articulação, é possível extrair a geometria inerente a este sistema, conforme se
representa na figura seguinte:

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
44
F1
θ1
E1
E2
F2
Extensor Flexor
Y
X
lple
lplf
lpe lpf
hfhe
LeMT
LfMT
Figura 3.9 - Representação geométrica bidimensional (X0Y) simplificada do sistema em causa,
considerando apenas uma articulação e um par de antagonistas, (adaptado de Lan, 2005).
Os sinais hf(t) e he(t) são os braços de força correspondentes aos músculos flexor e
extensor aquando do movimento rotacional da articulação, θ é o ângulo produzido nesse
movimento e LfMT
(t) e LeMT
(t) representam os comprimentos dos actuadores músculo-
tendíneos flexor e extensor, respectivamente. As suas relações intrínsecas podem então ser
expressas através dos parâmetros fisiológicos do sistema (vd Quadro 3.1):
(3.1 a, b)
(3.2 a, b)

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
45
Sendo esta geometria aplicável também num sistema composto por duas articulações e
dois pares de músculos antagonistas.
3.3.1 Dinâmica de Recrutamento das Unidades Motoras
O conceito clássico de controlo do sistema motor humano assenta no controlo directo
dos potenciais de acção provenientes dos neurónios motores alfa que excitam os vários
músculos esqueléticos (Gerald et. al., 1979).
As unidades motoras são definidas como o conjunto de um único neurónio motor e de
todas as fibras musculares que os seus ramos enervam. Um potencial de acção num neurónio
motor humano irá causar um potencial de acção em todas as fibras musculares da unidade
motora. Uma vez que não é libertado apenas um único potencial de acção, mas sim uma
sequência de potenciais, é importante não induzir a tetanização das fibras musculares da
unidade motora (vd. Guyton e Hall, 2003). Os grandes neurónios motores alfa localizados no
corno anterior da espinal medula, são um lugar de convergência de sinapses inibitórias e
excitatórias de todos os reflexos. De modo a modelar a correspondência entre o SNC e o
mecanismo de activação muscular, o sinal de comando descendente que permite o
recrutamento das unidades motoras alfa foi realizado através da geração de um sinal
sequencial de modelação por pulsos N(t), com uma frequência fundamental F0 de 10 Hz,
baseado em estudos realizados por Ning Lan (Lan, et. al., 2005). Será este sinal de comando
a entrada do modelo do sistema neuro-músculo-esquelético.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
46
Figura 3.10 – Comandos descendentes gerados em computador
O recrutamento dos neurónios motores alfa pode ser representado, por uma dinâmica
de primeira ordem (Lan, et. al., 2005) cujas variáveis de entrada são os comandos
descendentes do SNC para os músculos extensor e flexor Ne(t) e Nf(t) e, as variáveis de saída
ce(t) e cf(t) constituem a activação das unidades motoras alfa, que irão recrutar as unidades
motoras e que, posteriormente, enervarão o músculo extensor e flexor:
(3.3 a, b)
onde τNf e τNe representam as constantes de tempo relativas ao recrutamento das
unidades motoras, em relação aos músculos flexor e extensor respectivamente. Os valores
destas mesmas constantes de tempo foram baseados no tempo genérico de activação das
fibras musculares esqueléticas, que é aproximadamente de 50 milissegundos (Guyton e Hall,
2003). Contudo, tendo em conta que a dinâmica de recrutamento das unidades motoras é

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
47
mais rápida que a de activação do músculo esquelético os valores de τNf e τNe serão inferiores
a 50 milissegundos.
Posto isto partindo, de um estado inicial para o recrutamento das unidades motoras
c(0) poder-se-á com certeza levar esse estado até um qualquer outro estado futuro c(t),
realizando o respectivo modelo de estado, referente à dinâmica de recrutamento motor:
(3.4)
Figura 3.11 – Dinâmica de Recrutamento das Unidades Motoras sob a forma de modelo de
estado.
3.3.2 Dinâmica de Activação Muscular
Após o recrutamento dos neurónios motores, a sequência de sinais de excitação
neuromusculares são determinados por uma série de malhas retroactivas. As retroacções são
constituídas pelos reflexos sensoriais, incluindo o efeito inibitório das células de Renshaw, o

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
48
reflexo proveniente dos órgãos tendinosos de Golgi, assim como o reflexo de extensão e de
inibição recíproca do músculo, associados ao fuso muscular. Foi possível modelar os sinais de
excitação neuronal ue(t) e uf(t) através de uma dinâmica de primeira ordem, dependente destes
mesmo reflexos sensoriais e do sinal de recrutamento descrito anteriormente:
(3.5 a, b)
Nas equações 3.5 a, e b, sf e se são os ganhos referentes aos reflexos de extensão
provenientes dos fusos musculares; gf e ge os ganhos referentes aos efeitos inibitórios das
células de Renshaw; rf e re os ganhos referentes ao efeito inibitório recíproco; IfGTO
(t) e IeGTO
(t) os valores de retroacção dos órgãos tendinosos de Golgi (vd. Subcapítulo 3.3.5.); υf (t) e υe
(t) são as frequências de descarga relativas às fibras nervosas Ia dos fusos musculares (vd.
Guyton e Hall, 2003), cuja dinâmica será descrita no subcapítulo 3.3.4. Os ganhos associados
a estes reflexos, tal como foi referido, são presumivelmente ajustados pela unidade de
controlo supra-espinal. De modo a se modelar essa regulação os valores destes ganhos foram
analisados, com vista a testar os seus efeitos no controlo dos movimentos obtidos para o
modelo anatómico do membro superior humano, em causa. Essa mesma análise de
sensibilidade foi baseada em estudos efectuados por Ning (Lan, et. al., 2005).

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
49
Figura 3.12 – Diagrama de blocos da sequência de excitação neuromotora.
A sequência de excitação neuronal de i unidades motoras ui (t), com i = 1… n, encontra-
se relacionada com neurónios motores, tal como foi dito anteriormente, através de uma
variável intermédia denominada activação muscular a(t), adoptando a noção original de
―estado activo‖ do modelo de Hill (Hill, 1938; Hill, 1949).
Tendo sido adoptado o formalismo de Zajac (Zajac, 1989) pelas razões descritas
anteriormente (vd. Subcapítulo 2.3.2.), para representar o processo de activação muscular do
par muscular flexor – extensor ae(t) e af(t), foi utilizada uma dinâmica linear de primeira
ordem:

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
50
(3.6 a, b)
onde τactf e τacte representam as constantes de tempo relativas à activação das fibras musculares
esqueléticas, aquando da sua completa excitação (ue(t) = uf(t) = 1 ), em relação aos músculos
flexor e extensor respectivamente. Os valores destas constantes de tempo têm um valor
aproximado ao tempo genérico de activação das fibras musculares esqueléticas, que é
aproximadamente de 50 milissegundos (Guyton e Hall, 2003). Tal como foi considerado
anteriormente, este modelo assume que a constante de tempo responsável pelo aumento da
activação de um músculo completamente excitado (i.e. τactf e τacte) é menor que a constante de
tempo de um músculo completamente relaxado (i.e. τdesactf e τdesacte) (Zajac, 1989). Desta
forma, βf e βe especificam o rácio entre estas constantes de tempo de activação e de
relaxamento:
(3.7 a, b)
Tendo em conta 3.7 a, e b, 3.6 a, e b, podem ser simplificadas, apresentando a seguinte
forma:
(3.8 a, b)

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
51
Figura 3.13 - Dinâmica de Activação Muscular sob a forma de modelo de estado.
3.3.3 Propriedades Mecânicas Musculares
O actuador músculo-tendíneo foi modelado de acordo com Zajac (Zajac, 1989). As
propriedades mecânicas musculares descrevem a generalidade das características físicas e
estruturais do músculo em si, incluindo a força muscular activa, a força muscular passiva e a
interacção com o tendão (Lan L., et. al., 2006). Contudo, neste trabalho foi apenas tido em
conta a força muscular activa e a interacção do músculo com o tendão, uma vez que neste
modelo a maior parte dos músculos de suporte do braço operam abaixo dos seus
comprimentos fisiológicos máximos, onde as forças passivas não são proeminentes quando
comparadas com as forças activas.
A força muscular F m
(t) é definida como o produto de três factores: a activação
muscular a(t), a relação força-comprimento muscular fl e a relação força-velocidade muscular
fv, tendo sido já utilizada para a análise biomecânica e fisiológica deste tipo de modelação
muscular (Zajac 1989; Lan, 2002; Lan, et. al., 2005; Lan L., et. al., 2006):
, i = flexor, extensor (3.9)

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
52
onde consiste no factor força-comprimento muscular em relação ao valor de
comprimento muscular isométrico L0m
, consiste no factor força - velocidade muscular
normalizada em relação ao seu valor máximo de encurtamento muscular vmax , representa
o pico de força isométrica e ai(t) o estado de activação muscular.
Estes factores apresentam formas particulares, representando graficamente as relações
entre a força muscular e o comprimento e velocidade das fibras musculares esqueléticas. Tal
como em 2.3.2., a relação força – comprimento é obtida em condições de contracção
isométrica e activação muscular máxima (a(t) = 1). A região correspondente a uma geração de
força muscular activa em relação ao comprimento isométrico das fibras musculares, ocorre
aproximadamente entre (Zajac, 1989) e pode ser representada
graficamente através de uma curva polinomial (Lan, et. al., 2005; Lan, 2002):
(3.10)
onde d é uma constante de escala da curva polinomial e o comprimento das fibras
musculares normalizado em relação ao seu valor isométrico .
Neste trabalho o valor adoptado para d foi de -1,8 (Lan, et. al., 2005; Lan, 2002).
Geralmente, não considerando a gama normal de movimentos do braço humano, o
comprimento das fibras musculares irá decair após a relação força-comprimento alcançar o
seu máximo em . A relação força – velocidade baseia-se, para a componente concêntrica
do movimento muscular, na formulação matemática proposta por Hill (Hill, 1938) sendo do
tipo hiperbólica:
(3.11)
em que Fm
0 é a força muscular isométrica, vm
(t) é a velocidade muscular e onde a e b são
constantes de escala. Uma normalização da equação anterior permite calcular a velocidade das
fibras musculares esqueléticas do músculo em causa:

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
53
(3.12)
Desta forma, (t) consiste na velocidade muscular normalizada em relação ao seu
valor máximo de encurtamento muscular vmax. Os valores de vmax e de Fm
0 encontram-se no
quadro 3.1 do subcapítulo 3.4., correspondendo ao quadro de parâmetros utilizados para a
simulação do modelo em causa. O valor da constante k é de cerca de 0,25 para a maioria dos
músculos esqueléticos (Freivalds, 2004). Desta forma é possível determinar os valores das
constantes a e b:
(3.13 a, b)
3.3.4 Dinâmica dos Fusos Musculares e Comando Gama
Os receptores sensoriais (vd. Guyton e Hall, 2003) localizados nas fibras musculares
esqueléticas (proprioreceptores) monitorizam o estado dos movimentos realizados pelos
segmentos corporais enviando essa mesma informação, de retorno para os neurónios motores
localizados na espinal medula. Entre esses receptores sensoriais encontram-se os fusos
musculares e os órgãos tendinosos de Golgi (cuja dinâmica modelada será descrita no
subcapítulo seguinte).
Estudos realizados (McMahon, 1984; Lan, et. al., 2005; Lan L., et. al., 2006)
demonstraram que os fusos musculares, em semelhança com o modelo muscular de Hill,
poderiam ser modelados através de um sistema linear mola – amortecedor, como ilustra a
figura 3.14, de modo a enviar a informação de retroacção para o SNC, sobre as variações de
comprimento e velocidade sentidas nas fibras musculares esqueléticas. Este sistema é
formado por um elemento elástico (KPE) em paralelo com um elemento amortecedor (Bs), e
por sua vez em série com outro elemento elástico (KSE). Como resultado obtém-se à saída
deste sistema a força de tensão correspondente aquela sentida pelo fuso muscular. As fibras
intrafusais são enervadas por pequenas fibras motoras gama (γ), (vd. Guyton and Hall, 2003).

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
54
γ0
Bs
KPE
KSE
Ts Ts
Input Gama
Figura 3.14 – Dinâmica dos fusos musculares.
Uma vez que o reflexo de extensão emitido pelo fuso muscular é proporcional à força
de tensão do mesmo, que irá aumentar com a velocidade de extensão das fibras musculares
através da relação força – velocidade (Wang. L., et. al., 2002), a elasticidade da região
contráctil do fuso muscular irá depender da incorporação de molas rígidas no sistema massa –
amortecedor modelado (He Jiping, et. al., 2001). Devido a este facto, foi considerada uma
dinâmica linear de primeira ordem, correspondente a um sistema mola – amortecedor de
modo a modelar a dinâmica dos fusos musculares, que é dada por (Lan, et. al., 2005):
(3.14 a, b)
Onde Tsf (t) e Tse (t) corresponde à força de tensão no fuso muscular em relação aos
músculos flexor e extensor, respectivamente, xf e xe corresponde ao comprimento das fibras
intrafusais dos músculos flexor e extensor, sendo igual ao comprimento muscular (xi (t) = Lim
(t), i = flexor, extensor). As constantes (KSEf; KSEe) e (KPEf; KSEe) correspondem às constantes
elásticas dos elementos em série e paralelo em relação aos músculos flexor e extensor
respectivamente, enquanto Bsf e Bse corresponde ao coeficiente de amortecimento do elemento
amortecedor dos músculos flexor e extensor, respectivamente. Ts0 (γf) e Ts0 (γe) corresponde à
tensão das fibras intrafusais dos músculos flexor e extensor, que é directamente proporcional,

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
55
através de uma constante de proporcionalidade P, à intensidade de activação destas fibras
(McMahon, 1984; Lan, et. al., 2005), por parte das fibras motoras gama (γ):
(3.15 a, b)
P. Bessou, et al. (1965) demonstraram que a taxa de disparo dos potenciais de acção dos
neurónios motores gama é proporcional à tensão inerente às fibras intrafusais, ou seja:
(3.16 a, b)
onde (t) e (t) são as frequências (Hz) de disparo das fibras motores gama (γ), em relação
aos músculos flexor e extensor, respectivamente e A uma constante de proporcionalidade. O
valor desta constante foi determinado de modo que a resposta dos fusos musculares durante
um estímulo linear fosse semelhante à verificada em dados experimentais (P. Bessou, et al.,
1965; McMahon, 1984). Estudos neurofisiológicos (Humphrey e Reed, 1983; Perlmutter, et.
al., 1998) indicaram que um único conjunto de neurónios motores gama (γ) pode activar os
interneurónios localizados na espinal medula, exibindo controlo recíproco dos músculos
antagonistas, através da activação das fibras aferentes gama que irão enervar as fibras
intrafusais. Assim, é possível utilizar apenas um comando estático gama para enervar estas
fibras intrafusais, apresentando uma gama de valores compreendidos entre [-0,5, 0,5]. Para os
músculos flexores e extensores, os respectivos valores de γf e γe são dados por:
(3.17 a, b)
Tal como o comando descendente N(t) utilizado para o recrutamento das unidades
motoras alfa, o comando γ(t) foi gerado um sinal sequencial de modelação por pulsos, com
frequência fundamental de 10 Hz (Lan, et. al., 2005).

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
56
3.3.5 Retroacção dos Órgãos Tendinosos de Golgi
Os órgãos tendinosos de Golgi (GTO – “Golgi Tendon Organs”) consistem nos
proprioreceptores mais importantes a seguir aos fusos musculares (Guyton e Hall, 2003).
Cada receptor GTO responde intensamente de forma não linear à força de tensão activa
produzida pelas fibras musculares (resposta dinâmica), retrocedendo, numa fracção de
segundo, a um nível inferior de descarga no estado estável, que é quase directamente
proporcional à força muscular (resposta estática) (Freivalds, 2004).
Quando os receptores GTO de um determinado músculo-esquelético são estimulados
por aumento da força muscular, são fornecidas informações instantâneas ao SNC, originando
efeitos reflexos inibitórios no respectivo músculo. Esta retroacção negativa, que impede o
desenvolvimento excessivo de força no músculo, foi incorporada nos sinais de excitação
neuronal ue (t) e uf (t), tal como ilustram as equações 3.3 a e, b. De forma a descrever a
dinâmica dos órgãos tendinosos de Golgi, face à força gerada pelo respectivo grupo muscular,
foi utilizado o modelo de Houk e Simon (Houk e Simon, 1967), representado no domínio da
frequência através de um filtro passa – banda cuja função de transferência é dada por 3.18.
Prochazka e Gorassini (Prochazka e Gorassini, 1998) confirmaram posteriormente a
aplicabilidade deste modelo no comportamento aferente do órgão tendinoso durante um
movimento normal (He Jiping, et. al., 2001).
(3.18)
Transcrevendo para a forma de espaço de estados, obtém-se a seguinte dinâmica:

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
57
(3.19)
Deste modo, o sinal de retroacção proveniente dos proprioreceptores de Golgi é
recebido pelos neurónios motores, contudo a interacção entre os órgãos tendinosos de Golgi e
os neurónios motores permanece desconhecida (He Jiping, et. al., 2001). No presente
trabalho, assume-se para o ganho estático KGTO
o valor de 0,001 nA/N (He Jiping, et. al.,
2001). Estudos anteriores originados por Houk e Rymer (1981), demonstraram que um bom
ajuste do valor deste ganho permitirá a regulação da elasticidade das fibras musculares.
3.3.6 Dinâmica do Actuador Músculo-Tendíneo
Para se modelar as dinâmicas inerentes ao actuador músculo – tendíneo, foi tido em
conta o modelo descrito por Zajac (Zajac, 1989), segundo o qual a razão pela qual os
segmentos corporais se movem deve-se ao facto de a capacidade de geração de força do
actuador músculo-tendíneo ser afectada pelo seu comprimento LMT
(t) e velocidade v MT
(t), que
por sua vez depende da posição e movimento dos segmentos. Desta forma, a cinemática dos
segmentos corporais depende, por sua vez, da força F T
(t) de cada actuador, em que músculo,
tendão e segmentos corporais, formam um sistema retroactivo (vd. Figura 3.15), (Zajac,
1989). A função motora deste actuador é modelada através de uma dinâmica dimensional de
primeira ordem. Para determinar essa dinâmica, a taxa (normalizada) de variação da força
gerada pelo tendão deverá ser obtida, em função das variáveis de estado normalizadas,
designadamente a força gerada pelo tendão , o comprimento do actuador
músculo-tendíneo e a velocidade desse mesmo actuador
onde consiste no parâmetro de escala temporal (vd.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
58
Equação 2.4). O tendão é modelado como uma unidade elástica linear, pelo que apresenta
uma determinada constante de elasticidade , que pode ser normalizada em relação ao
comprimento óptimo das fibras musculares e ao pico isométrico de força muscular:
(3.20)
Os valores adoptados para a constante de elasticidade do tendão foram baseados em
estudos conduzidos por Zajac (Zajac, 1989) e por J. Wood (Wood, et al., 1989).
A dinâmica dimensional do actuador músculo-tendíneo pode ser descrita através da
seguinte equação, sendo dada pela diferença entre a velocidade do actuador e das
próprias fibras musculares (vd. 3.12, subcapítulo 3.3.3) (Zajac, 1989):
(3.21)
Esta força gerada é função do ângulo produzido na articulação θ(t) e da sua respectiva
velocidade angular ω(t). Sendo LfMT
(t) e LeMT
(t) os comprimentos dos actuadores músculo-
tendíneos flexor e extensor, respectivamente, é possível calcular as suas velocidades lineares,
normalizadas de acordo com o parâmetro de escala temporal (Lan, et. al., 2005):
(3.22 a, b)
A força gerada pelo actuador músculo – tendíneo , normalizada em relação ao seu
pico isométrico, é igual à força gerada pelo músculo e pelo tendão, também normalizadas em

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
59
relação ao seu valor isométrico. Como tal utiliza-se 3.21 para calcular a força muscular
(Zajac, 1989), tendo em conta:
= (3.23)
Figura 3.15 – Dinâmica do actuador músculo – tendíneo (adaptado de Zajac, 1989).
Uma vez que a força produzida pelo tendão FT(t) é igual à força produzida pelo músculo
FM
(t), então é possível calcular o comprimento do tendão LT(t), (Lan, 2002):
(3.24)
onde , é o comprimento do tendão em relação à sua posição de repouso. Este, por sua vez, é
calculado através da seguinte expressão, (Zajac, 1989):
(3.25)
onde é o comprimento máximo que o actuador músculo – tendíneo pode atingir e é o
comprimento muscular isométrico (valor fisiológico óptimo). O comprimento é assim dado
pela diferença entre os comprimentos do actuador músculo-tendíneo e do tendão,
normalizando-o em relação ao seu valor fisiológico óptimo:
(3.26)

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
60
3.3.7 Dinâmica Articular
Este modelo foi desenvolvido para o plano sagital sendo constituído por duas zonas
articulares e dois pares de músculos antagonistas, tendo a característica das dinâmicas
articulares serem idênticas, variando apenas os valores numéricos dos seus parâmetros
fisiológicos (vd. Quadro 3.1). Desta forma, e para simplificar o processo de modelação
articular, considere-se apenas uma única articulação, tal como o modelo geométrico
bidimensional da figura 3.9.
O momento de torção desenvolvido na articulação (t), durante o seu movimento de
rotação é calculado através da seguinte equação (Lan, et. al., 2005):
(3.27)
Uma vez que a articulação em causa poderá estar sujeita a momentos de torção externos
( ), inclui-se nesta equação esse mesmo parâmetro. Considerando a segunda lei de Newton
para o movimento rotacional e tendo em conta que as articulações em causa são do tipo
sinovial, como tal é necessário incluir o efeito da viscosidade, ou seja (Lan, et. al., 2005):
(3.28)
cuja dinâmica pode ser representada sob a forma de modelo de estado:
(3.29)
onde é o momento de inércia da articulação e o coeficiente de viscosidade. O valor
do momento de inércia não foi calculado mas antes, retirado de tabelas de valores numéricos
para estes parâmetros fisiológicos, para o caso das articulações do ombro e cotovelo (Maurel,

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
61
et. al., 1996; Lan, et. al., 2005). Quanto ao coeficiente de viscosidade da articulação, este
pôde ser calculado a partir da elasticidade da mesma ( ):
(3.30)
Foi demonstrado (Cannon e Zahalak, 1982) que o coeficiente de viscosidade deste tipo
de articulações corresponde a cerca de 3% da elasticidade a que é sujeita, pelo que:
(3.31)
A elasticidade muscular activa (dependendo da activação muscular), dos músculos
flexor e extensor, em condições de contracção isométrica é dada por (Lan, et. al., 2005):
(3.32 a, b)
onde e são as forças isométricas dos músculos flexor e extensor respectivamente, e
e os seus comprimentos óptimos, em que c é uma constante de proporcionalidade.
De referir que a força elástica passiva não foi tida em conta neste presente trabalho.
3.4 Simulação Numérica e Resultados
Com o objectivo de avaliar o desempenho do modelo desenvolvido, procederam-se a
duas fases complementares, envolvendo a simulação de padrões de movimento e a sua
respectiva validação:
Fase 1 – Desenvolvimento e Simulação: O modelo descrito pelas dinâmicas analíticas
anteriores é implementado numa linguagem particular e realizada a sua simulação
numérica de modo a analisar os resultados obtidos, tendo em conta os parâmetros

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
62
neuro-músculo-esqueléticos obtidos na análise bibliográfica levada a cabo durante o
desenvolvimento deste trabalho (quadro 3.1);
Fase 2 – Validação de Resultados: Testes laboratoriais, que irão permitir validar os
resultados obtidos na simulação numérica (fase 1), de modo a ser possível calcular o
nível de desempenho e robustez do modelo.
Na primeira fase procedeu-se à simulação numérica do sistema em malha aberta, sem
inclusão de nenhum tipo de algoritmo de controlo. O modelo em causa foi implementado em
MATLAB (versão 7.5). Todas as equações diferenciais não lineares descritas pelas equações
anteriores são transformadas em equações de estado, utilizando para tal o motor de integração
ode deste software, neste caso utilizando o método ode45. Como principais variáveis de
estado tidas em conta neste trabalho, que consiste no ângulo produzido pela articulação
em causa (com i = ombro, cotovelo), e que consistem nas activações dos
músculos flexor e extensor, e que consistem nos sinais de recrutamento dos
neurónios motores, e as forças geradas pelos músculos flexor e extensor e
e as respostas sensoriais dos fusos musculares. Os valores iniciais destas
variáveis de estado são por conveniência de aproximadamente zero, mais propriamente
0,0001. As variáveis de entrada deste sistema, são os sinais procedentes do SNC Nf (t) e Ne (t)
que irão posteriormente recrutar as unidades motoras alfa relativas a cada músculo, flexor e
extensor, assim como os respectivos comandos gama γf (t) e γe (t), de modo a modelar a
enervação das fibras intrafusais por parte das pequenas fibras motoras gama.
Posto isto, o modelo de estado referente a cada subsistema individual formado por uma
articulação e os respectivos actuadores antagonistas (ombro + músculos antagonistas
adjacentes e cotovelo + músculos antagonistas adjacentes), é representado por:

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
63
(3.33)
Tendo em conta o modelo de estado desenvolvido procedeu-se à sua simulação, através
do seguinte algoritmo:

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
64
Dinâmica Neuro - Músculo
- Esquelética
Comandos Descendentes do SNC
Nf(t) e Ne(t)
Dinâmica de Recrutamento das
Unidades Motoras
cf(t) e ce(t)
Sequência de Excitação das
Unidades Motoras
uf(t) e ue(t)
Dinâmica de Activação
Muscular
af(t) e ae(t)
Relação Força - Comprimento
FL(t)
Relação Força - Velocidade
FV(t)
Comprimento do Tendão
LT
f(t) e LT
e(t)
Comprimento Muscular
LM
f(t) e LM
e(t)
“Tendon Slack
Length”
LT
s(t)
Velocidade Muscular
vM
f(t) e vM
e(t)
Dinâmica do Actuador Músculo - Tendíneo
dFMT
f(t)/ dτ e dFMT
e(t)/ dτ
Força Muscular
FM
f(t) e FM
e(t)
Força Muscular Normalizada
FM
f(t) e FMe(t)
Velocidade do Actuador
Músculo - Tendíneo
vMT
f(t) e vMT
e(t)
Movimento Bidimensional segundo
XOY
Dinâmica Articular
Tf(t), θf(t) e ωf(t)
Co
ma
nd
os
Ga
ma
γf(
t) e
γe(t
)
Figura 3.16 – Algoritmo correspondente ao modelo neuro-músculo-esquelético desenvolvido.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
65
Os valores numéricos dos parâmetros, utilizados na modelação das respectivas
dinâmicas neuro-músculo-esqueléticas foram baseados em trabalhos publicados (Maurel, et
al., 1996; Lan, 2002; Holzbaur, et al., 2005; Lan, et al., 2005), (vd. Quadro 3.1):
Quadro 3.1 – Parâmetros numéricos utilizados no modelo neuro-músculo-esquelético.
VALOR
SIMBOLOGIA DESCRIÇÃO SUBSISTEMA DO
COTOVELO
SUBSISTEMA
DO OMBRO
lpf Distância entre a articulação e a inserção do
músculo flexor [m] 7,0×10
-2 4,5×10
-2
lpe Distância entre a articulação e a inserção do
músculo extensor [m] 5,5×10
-2 5,0×10
-2
lplf Distância entre a origem e a inserção do músculo
flexor [m] 14,0×10
-2 9,0×10
-2
lple Distância entre a origem e a inserção do músculo
extensor [m] 11,0×10
-2 10,0×10
-2
Constante de tempo relativa ao recrutamento das
unidades motoras do músculo flexor [s] 19,0×10
-3 19,0×10
-3
Constante de tempo relativa ao recrutamento das
unidades motoras do músculo extensor [s] 19,0×10
-3 19,0×10
-3
Constante de tempo relativa à activação do
músculo flexor [s] 52,0×10
-3 52,0×10
-3
Constante de tempo relativa à activação do
músculo extensor [s] 44,5×10
-3 44,5×10
-3
Constante de tempo relativa à dimensionalidade
temporal [s] 0,5 0,5
gf Ganho do efeito inibitório das células de
Renshaw presentes no músculo flexor 0,58 0,58
ge Ganho do efeito inibitório das células de
Renshaw presentes no músculo extensor 0,35 0.35
sf Ganho do reflexo de extensão proveniente dos
fusos musculares flexores 0,3 0,3
se Ganho do reflexo de extensão proveniente dos
fusos musculares extensores 0,3 0,3
rf Ganho do efeito inibitório recíproco do músculo
flexor 0,6 0,6

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
66
VALOR
SIMBOLOGIA DESCRIÇÃO SUBSISTEMA DO
COTOVELO
SUBSISTEMA
DO OMBRO
re Ganho do efeito inibitório recíproco do músculo
extensor 0,6 0,6
d Constante de escala da curva polinomial Força –
Comprimento Muscular -3,188 -3,188
Força muscular isométrico do músculo flexor [N] 135,45 180,60
Força muscular isométrico do músculo extensor
[N] 133,27 158,2
Comprimento óptimo das fibras musculares do
músculo flexor [m] 27,0×10
-2 12,0×10
-2
Comprimento óptimo das fibras musculares do
músculo extensor [m] 18,0×10
-2 14,0×10
-2
Comprimento máximo do actuador músculo-
tendíneo flexor [m] 46,7×10
-2 23,7×10
-2
Comprimento máximo do actuador músculo-
tendíneo flexor [m] 48,8×10
-2 20,6×10
-2
Constante elástica do elemento em série do
sistema utilizado para modelar a dinâmica dos
fusos musculares flexores [N/m]
100 100
Constante elástica do elemento em série do
sistema utilizado para modelar a dinâmica dos
fusos musculares extensores [N/m]
100 100
Constante elástica do elemento em paralelo do
sistema utilizado para modelar a dinâmica dos
fusos musculares flexores [N/m]
10 10
Constante elástica do elemento em paralelo do
sistema utilizado para modelar a dinâmica dos
fusos musculares extensores [N/m]
10 10
Constante de amortecimento do elemento
amortecedor do sistema utilizado para modelar a
dinâmica dos fusos musculares flexores [N/m2]
0,3 0,3
Constante de amortecimento do elemento
amortecedor do sistema utilizado para modelar a
dinâmica dos fusos musculares extensores[N/m2]
0,3 0,3
A Constante de proporcionalidade das frequências
de disparo das fibras motoras gama 50 50

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
67
VALOR
SIMBOLOGIA DESCRIÇÃO SUBSISTEMA DO
COTOVELO
SUBSISTEMA
DO OMBRO
P Constante de proporcionalidade da tensão das
fibras intrafusais 3,7 3,7
Constante de elasticidade do tendão flexor [N/m] 463,07×103 138,922×10
3
Constante de elasticidade do tendão extensor
[N/m] 463,07×10
3 811,28×10
3
KGTO
Ganho estático da dinâmica dos órgãos
tendinosos de Golgi [nA/N] 0,01 0,01
Ij Momento de inércia da articulação [kg/m2] 406,750×10
-3 461,875×10
-3
c Constante de proporcionalidade presente na
dinâmica da rigidez muscular -3,188 -3,188
vmax f = LM
0f / τc Velocidade máxima de encurtamento das fibras
musculares flexoras [m/s] 0,54 0,24
vmax e = LM
0e / τc Velocidade máxima de encurtamento das fibras
musculares extensoras [m/s] 0,36 0,28
af = 0,25FM
0f
Constante de normalização utilizada na relação
força-velocidade muscular, no caso das fibras
musculares flexoras
33,86 45,15
ae = 0,25FM
0e
Constante de normalização utilizada na relação
força-velocidade muscular, no caso das fibras
musculares extensoras
33,32 39,55
bf = 0,25vmax f
Segunda constante de normalização utilizada na
relação força-velocidade muscular, no caso das
fibras musculares flexoras
0,135 0,06
be= 0,25vmax e
Segunda constante de normalização utilizada na
relação força-velocidade muscular, no caso das
fibras musculares extensoras
0,09 0,07
Com base nestes parâmetros e no algoritmo proposto, foi realizada a simulação
numérica do sistema em malha aberta, como ilustram as figuras seguintes (figura 3.17 a 3.21).
O tempo de simulação foi de 0,5 segundos, considerando um passo de integração de 0,001
segundos, utilizando para tal o método explícito de Runge-Kutta.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
68
Recrutamento das Unidades Motoras Alfa dos Músculos Flexor e Extensor
das Regiões Articulares do Ombro e Cotovelo
Sequência de Excitação Neuronal das Unidades Motoras Alfa referentes aos Músculos Flexor e
Extensor das Regiões Articulares do Ombro e Cotovelo
Comandos Descendentes do SNC para os Músculos Flexor e Extensor das
Regiões Articulares do Ombro e Cotovelo
0 0.1 0.2 0.3 0.4 0.5t[s]
Ne 12 (t)
uf1 (t)
uf2 (t)
ue1 (t)
ue2 (t)
Nf 12 (t)
uf
12 (
t) [
mV
]
0.1
0.102
0.104
0.106
0.108
0.11
0.1
0.102
0.104
0.106
0.108
ue 1
2 (
t) [
mV
]
0
0.1
0.2
0.3
-0.1
cf
12 (
t) [
mV
]
0
0.1
0.2
0.3
-0.1
ce 1
2 (
t) [
mV
]
ce1 (t)
ce2 (t)
0
0.2
0.4
0.6
0.8
1
Nf
12 (
t) [
mV
]
cf1 (t)
cf2 (t)
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0
0.2
0.4
0.6
0.8
1
Ne 1
2 (
t) [
mV
]
Figura 3.17 – Dinâmicas de recrutamento e excitação neuronal, face aos comandos
descendentes provenientes do SNC.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
69
Sequência de Activação das Fibras Musculares Flexoras e Extensoras das Regiões
Articulares do Ombro e Cotovelo
Tensão Gerada pelas Fibras Intrafusais Flexoras e Extensoras, nas Regiões
Articulares do Ombro e do Cotovelo
Forças Musculars produzidas pelos Músculos Flexores e Extensores das Regiões
Articulares do Ombro e do Cotovelo
0.
1
0.10
2
0.10
4
0.10
6
0.10
8
0.1
0.102
0.104
0.106
0.108
0.11
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
ae1 (t)
ae2 (t)
af 1 (t)
af 2
(t)
a f 1
2 (
t) [
mV
]
a e 1
2 (
t) [
mV
]
0
1
2
3
4
0
0.5
1
1.5
2
2.5
0
2
4
6
8
0
2
4
6
8
1
0
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
FM
f 1
2 (
t) [
N]
FM
e 1
2 (
t) [
N]
TS
f 1
2 (
t) [
N]
TS
e 1
2 (
t) [
N]
FM
f 1 (t)
FM
f 2 (t)
FM
e1 (t)
FM
e2 (t)
TSe1 (t)
TSe2 (t)
TSf1 (t)
TSf2 (t)
Figura 3.18 – Dinâmicas de activação e geração de força muscular ao nível das fibras
intrafusais.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
70
Variação do Comprimento das Fibras Musculares Flexoras e Extensoras, na Região Articular do Obro e cotovelo
Variação da Velocidade das Fibras Musculares Flexoras e Extensoras, na Região Articular do Obro e cotovelo
Variação da Rigidez das Fibras Musculares Flexoras e Extensoras, na Região Articular do Obro e cotovelo
vM
f 12 (
t) [
m/s
]
0
0.4
0.6
0.8
1
0.2
0.3
0.5
0.6
0.7
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
LM
f 1 (t)
LM
f 2 (t)
LM
e 1 (t)
LM
e 2 (t)
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.26
0.28
0.3
0.32
0.34
0.36
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
vM
e 1 (t)
vM
e 2 (t)
vM
f 1 (t)
vM
f 2 (t)
0
0.5
1
1.5
1.5
2
2.5
3
3.5
4
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
kM
f 1
(t)
kM
f 2
(t)kM
e 1 (t)
kM
e 2 (t)
LM
f 12 (
t) [
m]
LM
e 1
2 (
t) [
m]
vM
e 1
2 (
t) [
m/s
]k
Me 1
2 (
t) [
Nm
/rad]
kM
f 12 (
t) [
Nm
/rad
]
0.2
0.4
Figura 3.19 – Comprimento, velocidade e rigidez das fibras musculares.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
71
Enervação das Fibras Intrafusais Flexoras e Extensoras por parte das Unidades Motoras Gama,
nas Regiões Articulares do Ombro e do Cotovelo
Resposta das Fibras Intrafusais Flexoras e Extensoras,
nas Regiões Articulares do Ombro e do Cotovelo
0.5
1
1.5
0
10
20
30
40
0
10
20
30
40
50
0
0.5
1
1.5
2
2.5
0
0.2
0.4
0.6
0.8
νf 1 (t)
νf 2 (t)
0.5
1
1.5
0 0.1 0.2 0.3 0.4 0.5
t[s]0 0.1 0.2 0.3 0.4 0.5
t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
Resposta dos Órgãos Tendinosos de Golgi existentes nos Músculos Flexores e Extensores,
nas Regiões Articulares do Ombro e do Cotovelo
IGT
Of
12 (
t) [
nA
/N]
IGT
Oe 1
2 (
t) [
nA
/N]
νe 1
2 (
t) [
Hz]
νf
12 (
t) [
Hz]
γ e
12 (
t) [
Nm
/rad
]
γ f
12 (
t) [
mV
]
γ f 12 (t)γ e 12 (t)
νe1 (t)
νe2 (t)
IGTOf 1
IGTOf 2
IGTOe 1
IGTOe2
Figura 3.20 – Resposta sensorial dos proprioreceptores musculares.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
72
Trajectória e Velocidade Angulare das Articulações do Cotovelo e
Ombro
Relação Força - Comprimento Muscular e Força - Velocidade Muscular,
em Relação aos Grupos Musculares das Articulações do Ombro e Cotovelo
Momento de Torção e Rigidez das Articulações do Cotovelo e
Ombro
-0.5
0
0.5
1
1.5
0
0.5
1
1.5
2
2.5
0
1
2
3
4
-10
-5
0
5
10
6
-4
-2
0
2
4
-3
2
4
6
8
10
12
14x 10
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 2 4 6 8 10 12t[s] x 10-3
0 0.1 0.2 0.3 0.4 0.5t[s]
ω c
oto
vel
o,
om
bro
(t)
[ra
d/s
]
θ c
oto
vel
o,
om
bro
(t)
[ra
d]
Т c
oto
vel
o,
om
bro
(t)
[Nm
]
σ c
oto
vel
o,
om
bro
(t)
[Nm
.s/r
ad]
FL
f1 f
2, e1
e2 (
t)
FV
f1 f
2,
e1 e
2 (
t)
θ cotovelo (t)
θ ombro (t)
ω ombro (t)
ω cotovelo (t)
Т cotovelo (t)
Т ombro (t)
σ cotovelo (t)
σ ombro (t)
FL f1, e1 (t)
FL f2, e2 (t)
FV f1, e1 (t)
FV f2, e2 (t)
Figura 3.21 – Trajectória e velocidade angular de cada uma das articulações, assim como os
seus momentos de torção e rigidez. Relações força-comprimento e força-velocidade muscular.
A figura 3.17 apresenta os resultados obtidos para a dinâmica de recrutamento e
excitação neuronal, com base na resposta aos comandos descendentes do SNC gerados. Estes

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
73
serão as entradas do sistema desenvolvido em malha aberta. Em relação aos sinais N(t), tanto
para o grupo muscular subjacente ao subsistema articular do cotovelo como para o do ombro,
provenientes do SNC, obtiveram-se picos de amplitude na ordem dos 0 a 1 mV, consistentes
com os valores obtidos em trabalhos publicados (Lan, 2002; Lan, et al., 2005). Os resultados
obtidos para a dinâmica de recrutamento das unidades motoras alfa são coerentes, na medida
em que reflectem a excitação proveniente do SNC, recrutando as unidades motoras à medida
que ocorrem os picos de amplitude de N(t). Esse recrutamento ocorre nos mesmos instantes
temporais em que ocorrem os picos de N(t), variando em amplitude desde -0,0534 a 0,2813
mV para os subsistema músculo-articular do cotovelo e desde -0,0276 a 0,1802 mV para o
subsistema músculo-articular do ombro.
A excitação neuromotora alfa apresenta um resultado satisfatório, pois à medida que são
recrutadas, enviam sequências excitatórias para as fibras músculo-esqueléticas. A sua
variação de amplitude é de 0,1 a 0,1091 mV para o subsistema músculo-articular do cotovelo
e desde 0,1 a 0,1078 mV para o subsistema músculo-articular do ombro, valores estes que vão
ao encontro dos valores obtidos noutros estudos (Lan, 2002; Lan, et al., 2005) cujo valor
médio obtido para os sinais de excitação neuromotora é de 0,1 mV. Neste trabalho, para a
determinação da sequência de excitação neuromotora alfa não foi apenas considerado os
reflexos provenientes dos fusos musculares mas também os dos órgãos tendinosos de Golgi.
Esses mesmos reflexos influenciaram de certa forma o padrão de sinal ilustrado na figura
3.17, contribuindo para uma dinâmica mais completa. De notar que o recrutamento das
unidades alfa e posterior excitação neuromotora é bastante acentuado no músculo flexor
anexo à articulação do cotovelo (bicípete braquial), que como se verá é um músculo bastante
activado durante o movimento do membro superior
A figura 3.18 apresenta os resultados obtidos para a dinâmica de activação muscular,
onde se destacam as activações dos dois pares de antagonistas, a sua posterior geração de
força muscular e a tensão gerada nas suas fibras intrafusais. Com base na sequência de
excitação neuronal obtida (vd. Figura 3.17) foi possível obter a dinâmica de activação
muscular. Esta dinâmica consiste na integração das dinâmicas anteriores (recrutamento e
excitação neuromotora) pelo que os resultados obtidos indicam precisamente esse
comportamento integral. Desta forma, a activação muscular apresenta um resultado
satisfatório, pois verificou-se a activação das fibras músculo-esqueléticas nos mesmos
instantes em que são excitadas pelos motoneurónios alfa. A sua variação de amplitude é de

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
74
0,1 a 0,1091 mV para o subsistema músculo-articular do cotovelo e de 0,1 a 0,1078 mV para
o subsistema músculo-articular do ombro, que são compatíveis com outros resultados
análogos (Lan, 2002; Lan, et al., 2005). Uma vez que o bicípete braquial foi o músculo que
recebeu uma maior excitação neuronal, essa excitação reflecte a sua grande activação
muscular, demonstrando que tem um papel bastante activo no movimento motor do membro
superior humano. Os restantes músculos (tricípete braquial e deltóide anterior e posterior)
apresentam uma menor activação muscular face ao bicípete braquial, pelo que produzem
menos força muscular, tal como ilustram os resultados obtidos.
A geração de força muscular ocorre à medida que variam os valores de activação
muscular, os resultados obtidos foram bastante satisfatórios, pelo que o grupo muscular reage
à activação a que é sujeito em determinados instantes de tempo, aumentando de valor quando
estão mais activados e diminuindo quando a activação decresce ou se mantém. Os resultados
obtidos demonstram que a activação muscular imediatamente após o instante inicial (t = 0
segundos) nunca é nula, havendo activação muscular logo nos primeiros 100 ms iniciais, o
que explica o facto de após esse instante os músculos iniciarem de imediato a produção de
força muscular, pelo que esta também não é nula nesses mesmos primeiros instantes.
A força muscular gerada no flexor do subsistema articular do cotovelo (bicípete
braquial) atinge um valor máximo de 3,61 N, o que reflecte a sua superior activação muscular
face aos outros grupos musculares, variando no tempo de acordo com a sua activação, o que
também se reflecte nos restantes grupos musculares. A força muscular gerada no extensor do
subsistema do cotovelo (tricípete braquial) atinge um valor máximo de 2,08 N, tendo uma
variação antagónica à do flexor, uma vez que enquanto o flexor induz o movimento de flexão
da articulação do cotovelo o extensor induz o movimento de extensão dessa mesma
articulação. No caso do flexor do subsistema articular do ombro (deltóide posterior), a força
muscular gerada, atinge um valor máximo de 1,78 N face ao valor máximo de 1,63 N atingido
pelo extensor deste mesmo subsistema articular (deltóide anterior). Sendo um grupo muscular
que apresenta uma menor activação face ao grupo muscular da articulação do cotovelo, se
explica o facto de a força gerada pelos músculo deltóides ser inferior.
A figura 3.18 ilustra também a reacção dos fusos musculares à força muscular
produzida, verificando-se que reagem a essa força de acordo com a enervação imposta pelas
unidades motoras gama. As tensões geradas nas fibras intrafusais atingem um valor máximo

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
75
para os seguintes grupos musculares: 8,23 N para o bicípete braquial, 6,11 N para o tricípete
braquial, 6,58 N para o deltóide posterior e 2,74 N para o deltóide anterior. Estes valores de
tensão muscular são coerentes com os valores de força muscular produzidos pelos músculos
esqueléticos, onde os seus fusos se inserem. De salientar o facto de os resultados alcançados,
irem ao encontro de resultados obtidos em estudos anteriores (Lan, 2002; Lan, et al., 2005).
A figura 3.19 apresenta os resultados obtidos para a evolução temporal dos parâmetros
físicos das fibras musculares constituintes dos músculos esqueléticos enunciados
anteriormente: comprimento e rigidez; assim como a evolução temporal do seu parâmetro
cinemático: a velocidade linear. Os resultados obtidos para a evolução temporal do
comprimento das fibras musculares são comparados com o padrão obtido para a força
muscular e tendo em conta o valor do comprimento óptimo das fibras (vd. Quadro 3.1). No
caso das fibras musculares do bicípete braquial o seu comprimento varia entre 0,1442 e 0,53
m, face a uma maior variação apresentada pelas fibras do tricípete braquial que variam em
comprimento entre 0,7960 e 0,9640 m. A gama de variação de comprimento muscular é
superior no bicípete braquial uma vez que é um músculo bastante activado e que produz uma
maior quantidade de força face ao seu antagónico. Contudo, uma vez que o comprimento
óptimo das fibras musculares do tricípete braquial é superior (vd. Quadro 3.1), este apesar de
produzir uma menor força muscular, a sua amplitude de variação é superior. Este mesmo
comportamento pode ser observado no grupo deltóide associado à articulação do ombro. No
caso do deltóide posterior, as suas fibras musculares variam entre 0,2236 e 0,6153 m,
enquanto que as fibras do deltóide anterior variam entre 0,3347 e 0,4812 m. Neste caso, tal
como no anterior, a gama de variação de comprimento das fibras musculares é superior no
músculo flexor, contudo é este músculo que apresenta também uma maior amplitude de
variação.
Como ilustram os resultados da figura 3.19, são as fibras musculares do bicípete
braquial que atingem uma maior velocidade linear, de 0,4742 a 0,4873 m/s, pelo que têm o
maior valor de velocidade máxima de encurtamento, na ordem dos 0,54 m/s (vd. Quadro 3.1).
Uma vez que a dinâmica é bastante rápida, a gama de valores relativos à velocidade muscular,
é bastante reduzida. No caso do tricípete braquial, para além de gerar uma menor força
muscular, a sua velocidade máxima de encurtamento também é menor, na ordem dos 0,36 m/s
(vd. Quadro 3.1). A sua gama de variação de velocidade muscular encontra-se entre 0,335 e
0,3388 m/s. No caso do grupo deltóide, a gama de valores referentes é inversa, pelo que as

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
76
fibras musculares do deltóide posterior atingem uma velocidade linear cuja gama varia entre
0,2286 e 0,2309 m/s, tendo em conta uma velocidade de encurtamento de 0,24 m/s, enquanto
no caso do deltóide anterior varia entre 0,2664 e 0,2689 m/s para uma velocidade máxima de
encurtamento de 0,28 m/s. Desta forma, conclui-se que as fibras musculares do grupo
muscular adjacente ao subsistema articular do cotovelo atingem uma maior velocidade linear
que as do grupo muscular adjacente ao subsistema articular do ombro.
A figura 3.19 ilustra também a variação temporal da rigidez das fibras dos dois grupos
musculares. No caso do subsistema articular do cotovelo sãos as fibras musculares do bicípete
braquial, aquelas que apresentam a uma maior rigidez devido à elevada activação a que estão
sujeitas, apresentando uma gama de valores entre 0,8054 e 1,3486 Nm/rad face a gama de
0,0849 a 0,5028 Nm/rad das fibras musculares do tricípete braquial, cuja activação é menor.
Este mesmo comportamento pode ser observado no grupo deltóide associado à articulação do
ombro. No caso do deltóide posterior, a rigidez das suas fibras musculares varia entre 1,9775
e 3,7253 Nm/rad, enquanto nas fibras do deltóide anterior varia entre 1,9655 e 2,3966
Nm/rad. Conclui-se assim que as fibras musculares do grupo muscular adjacente ao
subsistema articular do cotovelo atingem uma maior rigidez que as do grupo muscular
adjacente ao subsistema articular do ombro. De salientar o facto de os resultados alcançados,
irem ao encontro dos resultados obtidos em investigações anteriores (Lan, 2002; Lan, et al.,
2005).
A figura 3.20 ilustra a excitação gama e as respostas sensoriais dos proprioreceptores
musculares. Em relação à activação das fibras aferentes gama que irão enervar as fibras
intrafusais, os sinais de comando γ(t), tanto para o grupo muscular subjacente ao subsistema
articular do cotovelo como para o do ombro, foram gerados utilizando o mesmo padrão de
sinal de N(t). Foi tido em conta a utilização de um comando estático gama, com valores
compreendidos entre -0,5 e 0,5 tal como foi referido no subcapítulo 3.3.4. Desta forma
obtiveram-se picos de amplitude na ordem dos 0,5 a 1,5 mV, consistentes com os valores
obtidos em Lan, 2002; Lan, et al., 2005. Tal como foi referido no subcapítulo 3.3.4. a taxa de
disparo dos potenciais de acção das unidades motoras gama é proporcional à tensão gerada
nas fibras intrafusais, tensão essa gerada pela enervação das fibras gama. Desta forma, como
ilustram os resultados obtidos na figura 3.20, as taxas de disparo ocorrem nos mesmos
instantes temporais que ocorrem os picos de γ(t), atingindo uma frequência de disparo de

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
77
41,16 a 30,55 Hz para os subsistema músculo-articular do cotovelo e desde 32,88 a 13,70 Hz
para o subsistema músculo-articular do ombro, correspondendo aproximadamente aos
resultados obtidos em P. Bessou, et al., 1965; McMahon, 1984; Lan, et al., 2005.
Por fim, apresentam-se um dos resultados mais importantes, associados a uma das
contribuições deste trabalho na área da modelação neuro-músculo-esquelética humana: a
incorporação da retroacção dos órgãos tendinosos de Golgi. Utilizando o modelo de Houk e
Simon (Houk e Simon, 1967) e considerando um ganho estático KGTO
de 0,001 nA/N, as
respostas obtidas para cada um dos receptores GTO foram bastante satisfatórias. Quanto ao
grupo muscular adjacente ao subsistema articular do cotovelo, obteve-se uma resposta mais
activa por parte do receptor GTO do bicípete braquial, face ao seu antagónico existente no
tricípete braquial, uma vez que é no primeiro que se produz uma maior força muscular. O
mesmo sucede no grupo muscular deltóide, adjacente ao subsistema articular do ombro, onde
o receptor GTO do deltóide posterior também apresenta uma resposta mais activa face ao seu
antagónico. Estes sinais de retroacção são posteriormente incorporados durante o processo de
simulação na dinâmica das unidades motoras alfa, influenciando todo o comportamento de
activação muscular.
Na figura 3.21 apresentam-se os resultados cinemáticos obtidos para o sistema
modelado. Este modelo foi construído no plano sagital (X0Y) sendo constituído por dois
grupos musculares e duas articulações: cotovelo e ombro. A cinemática destes dois
subsistemas articulares foi analisada em simultâneo de modo a comparar as suas trajectórias e
velocidades angulares, assim como os momentos de torção gerados em cada uma das
articulações. Desta forma, as saídas do sistema em malha aberta são a trajectória angular da
articulação do cotovelo e a trajectória angular da articulação do ombro, uma vez que a
trajectória do membro superior humano modelado é dada pela combinação de θcotovelo (t) e de
θombro (t), transformando estas coordenadas em coordenadas cartesianas X0Y (plano sagital).
A dinâmica articular descrita no subcapítulo 3.3.7. permite determinar as trajectórias e
velocidades angulares das duas articulações. A aceleração angular é directamente
proporcional ao momento de torção a que as articulações estão sujeitas. Este é devido às
forças geradas pelo par de actuadores musculares, provocando o movimento de rotação
articular, sendo tanto maior, quanto maior for o momento de torção a que a articulação está
sujeita. Os resultados obtidos para as trajectórias angulares de cada uma das articulações são
apresentados na figura 3.21. A gama de valores para a posição angular da articulação do

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
78
cotovelo é de 0 a 1,1108 rad enquanto para articulação do ombro é de 0 a 1,2086 rad,
apresentando um padrão aproximadamente ondulatório.
Uma vez que o sistema se encontra inicialmente em repouso, o movimento angular no
instante inicial é nulo, contudo após esse instante inicial há um aumento significativo da
velocidade angular, correspondendo ao movimento de flexão realizado pelo grupo músculo-
articular. Após atingir o valor máximo de acréscimo, ocorre um decréscimo de velocidade
angular, atingindo valores negativos, o que demonstra a inversão de movimento, ou seja,
ocorre o movimento de extensão do grupo músculo-articular. Este padrão de movimento
verifica-se tanto para o grupo músculo-articular do cotovelo como para o grupo músculo-
articular do ombro. A gama de valores para a velocidade angular da articulação do cotovelo é
de 0 a 9,3472 rad/s enquanto para articulação do ombro é de 0 a 9,4136 rad/s. A articulação
do ombro atinge uma velocidade angular ligeiramente superior e desfasada da velocidade
angular da articulação do cotovelo, o que permite concluir que a articulação do ombro move-
se após a articulação do cotovelo se mover, o que está de acordo com o movimento natural.
Observando os resultados obtidos para os momentos de torção em cada uma das
articulações, estes atingem uma gama de 0 a 3,3882 Nm para o subsistema músculo-articular
do cotovelo, e de 0 a 4,4135 Nm para o subsistema músculo-articular do ombro. Os resultados
obtidos para os momentos de torção articulares apresentados na figura 3.21 indicam que essa
diferença é maior ao longo do tempo, para o grupo músculo deltóide, o que explica o facto de
o momento de torção ser superior na articulação do ombro, aliado também ao facto de o
momento de inércia ser superior na articulação do ombro (vd. Quadro 3.1). Para além dos
momentos de torção, trajectórias e velocidades angulares, é também a rigidez articular ao
longo do tempo que depende directamente da rigidez muscular. A rigidez da articulação do
cotovelo varia ao longo do tempo entre 0,0027 e 0,0040 Nm.s/rad, enquanto que a rigidez da
articulação do ombro varia entre 0,0101 e 0,0129 Nm.s/rad, gama de valores aceitável uma
vez que a rigidez muscular ao longo do tempo, é superior para o grupo muscular deltóide.
Estes resultados vão de encontro aos obtidos em Lan, 2002; Lan, et al., 2005.
As relações força-comprimento e força-velocidade musculares para os dois subsistemas
músculo-articulares, são também apresentadas na figura 3.21. Estes resultados foram obtidos
com o propósito de ilustrar como evoluem estas duas relações ao longo do tempo.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
79
Uma vez que se pretende conhecer a trajectória no plano sagital (XY) descrita pelo
membro superior modelado, foi necessário recorrer à transformação de coordenadas angulares
para coordenadas cartesianas. Neste contexto, o membro superior é encarado, do ponto de
vista mecânico como um pêndulo duplo composto, tal como ilustra a figura seguinte:
θ1
θ2
l2
l1
Figura 3.22 – Aproximação mecânica do braço humano a um pêndulo duplo composto.
A transformação de coordenadas angulares para cartesianas é efectuada de acordo com
3.33:
(3.34)

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
80
As trajectórias angulares apresentadas anteriormente irão desta forma traduzir as
trajectórias cartesianas descritas pelo sistema modelado, apresentando-se estes resultados nas
figuras que se seguem:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
t[s]
14
16
18
20
22
24
26
28
30
32
34
0
10
20
30
40
X cotovelo (t) [cm
] 0.5
Y c
otov
elo
(t)
[cm
]
Trajectória
X0Y cotovelo (t)
Trajectória Cartesiana da Articulação do Cotovelo
Figura 3.23 - Trajectória cartesiana da articulação do cotovelo.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
t[s]
0.5
10
15
20
25
30
35
40
-10
0
10
20
30
40
X om
bro (t) [cm]
Y o
mb
ro (
t) [
cm
]
Trajectória Cartesiana da Articulação do Ombro
Trajectória X0Y
ombro (t)
Figura 3.24 - Trajectória cartesiana da articulação do ombro.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
81
Trajectória X0Y
sistema (t)
-20
0
20
40
60
80
30
35
40
45
50
55
60
65
70
75
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Ysi
stem
a (t
) [c
m]
Xsistem
a (t) [cm]
t[s]
Trajectória Cartesiana do Membro Superior Humano
Modelado
Figura 3.25 – Trajectória cartesiana do membro superior humano modelado.
3.5 Validação e Análise Comparativa
Pretendeu-se verificar qual a activação muscular dos músculos considerados neste
trabalho, durante o movimento voluntário de extensão/flexão do ombro e cotovelo, seguindo
um determinado padrão. Desta forma, não se recorreu nem à medição em tempo real dos
ângulos gerados pelas articulações durante esse movimento (goniometria) nem à medição
directa da força muscular (transdutores de força, entre outros), mas sim à sua determinação
indirecta via activação muscular, e posterior análise comparativa face aos resultados obtidos
na simulação numérica.
Essa validação é realizada através da aquisição de sinais electromiográficos dos
músculos esqueléticos considerados neste modelo e seguindo o mesmo padrão de movimento.
Estes sinais electromiográficos são posteriormente injectados no modelo, analisando-se por
fim os resultados obtidos.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
82
3.5.1 Métodos de Electromiografia
O método de medição da actividade muscular em tempo real, denomina-se
Electromiografia (EMG), cujo gráfico que regista as variações das correntes que se produzem
ao longo do tempo, nos músculos em repouso ou em contracção muscular, é denominado de
Electromiograma.
O fundamento da EMG baseia-se na representação gráfica da actividade eléctrica do
músculo. São actualmente utilizadas duas formas de recolher os sinais EMG: EMG de
superfície e EMG de profundidade. A EMG de profundidade é um método invasivo e baseia-
se na colocação de eléctrodos no interior do músculo. O registo obtido é resultado dos
potenciais de acção de um conjunto de fibras musculares localizadas na proximidade do
eléctrodo de detecção. Este tipo de registo, apresenta uma reduzida utilidade quando se
pretende estudar o comportamento global dos músculos em condições biológicas (Hamonet et
al., 1979).
O fácil manuseamento e controlo, o maior conforto para o executante, a possibilidade de
uma análise global do comportamento muscular, e as correlações verificadas entre o EMG de
superfície (vd. Figura 3.26) e o trabalho mecânico produzido pelo músculo, justificam porque
a EMG de superfície é geralmente escolhida pelos investigadores face à EMG de
profundidade (vd. Figura 3.26), tendo sido esse o caso neste presente trabalho.
Figura 3.26 – Electromiografia de profundidade e de superfície.11
11
http://www.drbezner.com/emg.html

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
83
A tentativa de validação da EMG como forma de quantificar o trabalho muscular tem
dado origem nos últimos 40 anos à publicação de inúmeros trabalhos experimentais centrados
na relação entre a magnitude do sinal EMG e a força produzida pelo músculo. O conceito de
equivalente muscular preconizado por Bouisset (1973) tem sido utilizado em vários trabalhos
centrados na relação entre o EMG e o trabalho mecânico do músculo (Bouisset e Goubel,
1973; Bouisset et al., 1976; Le Bozec et al., 1980; Thepaut-Mathieu e Maton, 1985).
A relação linear entre EMG e força muscular (vd. Figura 3.27) foi verificada por um
conjunto amplo de autores em contracções musculares estáticas (Close et al, 1960; Komi e
Buskirk, 1970; Bouisset e Maton, 1973; Stephans e Taylor, 1973). No entanto, esta relação
linear está longe de ser pacífica e não é constatada na totalidade do leque de força, nem para
todos os músculos.
Figura 3.27 – Ilustração gráfica da relação força velocidade (EMD – Electromechanical Delay),
(Benno e Walter, 2003).
3.5.2 Ensaios Experimentais e Resultados
Em conjunto com a equipa de Engª Biomédica da FCT-UNL foi possível, através da
instrumentação e infra-estruturas adequadas, tendo em vista a recolha de sinais
electromiográficos, que possam ser utilizados como dados de validação experimental.
O objectivo principal foi o de adquirir a evolução temporal da activação dos músculos
bicípete braquial, tricípete braquial, deltóide posterior e deltóide anterior durante o mesmo
padrão de movimento obtido na simulação numérica. Desta forma, após a rectificação (a(t) >

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
84
0) dos electromiogramas obtidos, estes foram injectados no modelo numérico, utilizando-o
para calcular as forças geradas por esses grupos musculares, comparando os resultados
obtidos com os da simulação numérica. Este foi o critério de validação seguido.
A fim de ser possível adquirir os sinais electromiográficos, utilizou-se como sistema de
aquisição o Biopac Student Lab PRO (BIOPAC Systems, Inc.) constituído pela unidade de
hardware MP35 e acompanhado por um software de análise de dados. Esta unidade é
composta por quatro canais de aquisição analógicos e possibilita a sua conversão em sinais
digitais, de modo a serem processados pelo software de gestão, através de um sistema de
conversão A/D (Analógico/Digital) que apresenta uma resolução (antes de filtragem digital de
sinal) de 24 bits. Este equipamento destaca-se por ter uma boa relação sinal-ruído superior a
90 dB e pela comunicação com a unidade computacional ser feita via USB, seguindo a norma
2.0.
Tendo em conta a necessidade de aquisição e tratamento de sinais fisiológicos
(electromiografia), utilizou-se a versão profissional 3.7.1 do sistema Biopac Student Lab PRO
(BSL PRO), dado que este software é compatível com os principais sistemas operativos da
Windows® e da Apple® (Windows® 98 SE/Me/2000/XP; Mac® OS X 10.3 – 10.4).
A unidade de aquisição MP35, tendo sido sujeitada a testes standardizados de segurança
médica, é designada como um equipamento do tipo BF e, segundo as normativas IEC60601-1,
é classificado como um equipamento médico de Classe II. No entanto, esta unidade
juntamente com o software BSL PRO, só pode ser utilizada para aprendizagem ou
investigação. As especificações do dispositivo encontram-se indicadas no Anexo A.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
85
Figura 3.28 – Vista geral da unidade de aquisição MP35.
De modo a proceder à aquisição da actividade eléctrica muscular (EMG), o processo de
colocação de eléctrodos foi efectuado com base no método bipolar de colocação dos
eléctrodos (ou medição do Triângulo de Potencial de Einthoven), no qual a diferença de
tensão entre dois eléctrodos (o negativo e o positivo) é medida em relação a um terceiro
eléctrodo (de referência).
Deste modo, foram utilizados três eléctrodos de vinil EL503 (vd. Figura 3.29) por
músculo, sendo colocados do seguinte modo: um ―positivo‖, colocado na origem do músculo;
um ―negativo‖, que se coloca na sua inserção; e outro numa região próxima de modo a servir
de referência.
Figura 3.29 – Pack de eléctrodos EL503 utilizados para aquisição electromiográfica.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
86
Estes eléctrodos são económicos e apresentam duas componentes, uma plástica e outra
metálica. A componente plástica é a mais flexível e consiste num disco de vinil (com cerca de
35 mm de diâmetro) que suporta uma rede embebida num gel de condução hipoalérgico, e que
estabelece contacto directo com a pele (10mm2 de área de contacto). A componente metálica
constituída, essencialmente, por prata (Ag-AgCl) está inserida no disco plástico e permite
estabelecer ligação eléctrica entre o eléctrodo e o conjunto de cabos SS2L (vd. Figura 3.30). O
conjunto de cabos SS2L é a interface entre o eléctrodo e a unidade de aquisição MP35 e
permite a aquisição de biopotenciais de alta resolução.
Figura 3.30 – Conjunto de cabos SS2L.
Foi realizada uma análise electromiográfica de superfície de um único indivíduo de raça
caucasiana do sexo masculino com 1.80 m de altura, 80 kg de peso e 24 anos de idade, aos
mesmos grupos musculares que foram considerados no modelo, repetindo o mesmo padrão de
movimento. Realizaram-se três ensaios experimentais, nos quais se repetiu cerca de dez vezes
o mesmo movimento, com uma carga variável na extremidade da mão (vd. Figura 3.31). As
características dessa carga são dadas no seguinte quadro:
Quadro 3.2 – Características físicas da carga utilizada nos ensaios experimentais
Ensaio Descrição da Carga Peso (kg) Duração do
Ensaio (s)
Ensaio n.º 1 Barra Metálica 1.57 35
Ensaio n.º 2 Barra Metálica com apoios 2.05 35
Ensaio n.º 3 Barra Metálica com apoios e um peso de
1kg em cada extremidade 4.05 36

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
87
Figura 3.31 – Elementos constituintes da carga utilizada nos ensaios experimentais.
Foi concebida uma estrutura de suporte (vd. Figura 3.32) de modo a balizar o
movimento, evitando assim granularidades, e para que o individuo se encontre sentado numa
postura ergonómicamente correcta (vd. Figura 3.33):
Figura 3.32 – Estrutura de suporte aos ensaios experimentais.
l = 65.5 cm
l = 76 cm
l = 110 cm

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
88
Figura 3.33 – Aquisição em tempo real dos EMG's do indivíduo, realizando o movimento
padrão.
Os dados obtidos encontram-se representados nas figuras seguintes:

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
89
Figura 3.34 – Resultados experimentais do primeiro ensaio.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
90
Figura 3.35 – Resultados experimentais do segundo ensaio.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
91
Figura 3.36 – Resultados experimentais do terceiro ensaio.
Os resultados adquiridos através da unidade de aquisição MP35 apresentam, desta
forma, uma boa relação sinal-ruido, tal como ilustram as figuras apresentadas. Os EMG
adquiridos foram depois guardados num ficheiro de texto, de modo a ser possível a sua

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
92
exportação para o ambiente Matlab. Após a exportação dos dados, saturados em zero para
valores negativos e depois injectados no modelo, obedecendo ao seguinte algoritmo:
Dinâmica Neuro - Músculo
- Esquelética
ELECTROMIOGRAMAS
EMGf(t) e EMGe(t)
Dinâmica de Activação
Muscular
af(t) e ae(t)
Relação Força - Comprimento
FL(t)
Relação Força - Velocidade
FV(t)
Comprimento do Tendão
LT
f(t) e LT
e(t)
Comprimento Muscular
LM
f(t) e LM
e(t)
“Tendon Slack
Length”
LT
s(t)
Velocidade Muscular
vM
f(t) e vM
e(t)
Dinâmica do Actuador Músculo - Tendíneo
dFMT
f(t)/ dτ e dFMT
e(t)/ dτ
Força Muscular
FM
f(t) e FM
e(t)
Força Muscular Normalizada
FM
f(t) e FMe(t)
Velocidade do Actuador
Músculo - Tendíneo
vMT
f(t) e vMT
e(t)
Movimento Bidimensional segundo
XOY
Dinâmica Articular
Tf(t), θf(t) e ωf(t)
Rectificador
(Sequência de Excitação das Unidades
Motoras uf(t) e ue(t))
Figura 3.37 - Algoritmo de validação do modelo desenvolvido.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
93
De salientar o facto de todos os parâmetros considerados no modelo numérico (vd.
Quadro 3.1), são utilizados no algoritmo de validação do mesmo. Com base nestes parâmetros
e obedecendo ao algoritmo anterior, foi efectuada a simulação do sistema em malha aberta,
como ilustram as figuras seguintes (figura 3.38 a 3.41).
Uma vez que a dinâmica de recrutamento já não é estabelecida, recorrendo-se
directamente aos EMG para determinar a sequência de excitação neuromotora, os sinais N(t)
do SNC não são gerados. Neste caso, apenas o comando gama foi gerado, sendo utilizado o
mesmo sinal do modelo numérico.
Foi tido em conta um critério de apresentação de resultados, que demonstrasse uma
diferença significativa de dinâmicas neuro-músculo-esqueléticas. Desta forma, os resultados
apresentados são apenas referentes ao primeiro ensaio, em que o indivíduo apenas suporta
uma carga de aproximadamente 1,57 kg, e os resultados referentes ao terceiro ensaio, em que
o indivíduo suporta uma carga de aproximadamente 4,05 kg.
O tempo de simulação foi de 0,5 segundos, considerando um passo de integração de
0,001 segundos, utilizando para tal, o método de Runge-Kutta.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
94
Os resultados obtidos para o ensaio experimental n.º 1 são os seguintes:
Sequência de Excitação Neuronal das Unidades Motoras Alfa referentes aos Músculos
Flexor e Extensor das Regiões Articulares do Ombro e Cotovelo
uf
12 (
t) [
mV
]
ue 1
2 (
t) [
mV
]
uf1 (t)
uf2 (t)ue1 (t)
ue2 (t)
0 0.1 0.2 0.3 0.4 0.5
Sequência de Activação das Fibras Musculares Flexoras e Extensoras das Regiões
Articulares do Ombro e Cotovelo
Forças Musculars produzidas pelos Músculos Flexores e Extensores das Regiões
Articulares do Ombro e do Cotovelo
af1 (t)
af2 (t)
ae1 (t)
ae2 (t)
ae 1
2 (
t) [
mV
]
af
12 (
t) [
mV
]
FM
f 1 (t)
FM
f 2 (t)
FM
e1
FM
e2
(t)
(t)
FM
e 1
2 (
t) [
N]
FM
f 1
2 (
t) [
N]
0
1
2
3
4
0
0.5
1
1.5
2
0
0.2
0.4
0.6
0.8
0
0.1
0.2
0.3
0.4
0
0.2
0.4
0.6
0.8
0
0.1
0.2
0.3
0.4
0 0.1 0.2 0.3 0.4 0.5
0 0.1 0.2 0.3 0.4 0.5 0 0.1 0.2 0.3 0.4 0.5
0 0.1 0.2 0.3 0.4 0.50 0.1 0.2 0.3 0.4 0.5
t[s] t[s]
t[s] t[s]
t[s] t[s]
Figura 3.38 – EMG adquiridos durante o ensaio experimental n.º 1 e dinâmicas de activação e
força muscular, resultantes.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
95
LM
e 1
2 (
t) [
m]
Variação da Velocidade das Fibras Musculares Flexoras e Extensoras, na Região Articular do Ombro
e cotovelov
Me
12 (
t) [
m/s
]
LM
f 1
2 (
t) [
m]
vM
f 1
2 (
t) [
m/s
]k
Mf
12 (
t) [
Nm
/rad
]
kM
e 1
2 (
t) [
Nm
/rad
]
Variação da Rigidez das Fibras Musculares Flexoras e Extensoras, na Região Articular do Ombro e cotovelo
kM
f 1 (t)
kM
f 2 (t)
kM
e1 (t)
kM
e2 (t)
LM
e 1 (t)
LM
e 2 (t)
vM
e 1 (t)
vM
e 2 (t)
vM
f 1 (t)
vM
f 2 (t)
LM
f1 (t)
LM
f2 (t)
0
0.2
0.4
0.6
0.8
1
0.18
0.2
0.22
0.24
0.26
0.28
0.3
0
0.5
1
1.5
0.2
0.3
0.4
0.5
0.6
0.7
0.16
0.18
0.2
0.22
0.24
1.5
2
2.5
3
3.5
4
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
Variação do Comprimento das Fibras Musculares Flexoras e Extensoras, na Região Articular do Ombro
e cotovelo
Figura 3.39 – Comprimento, velocidade e rigidez muscular, ensaio experimental n.º 1.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
96
0.5
1
1.5
0
20
40
60
80
100
0
20
40
60
80
100
0
0.2
0.4
0.6
0.8
1
1.2
0
0.5
1
1.5
2
2.5
0.5
1
1.5
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
γ f
12 (
t) [
mV
]
γ f
12 (
t) [
mV
]ν f
12 (
t) [
Hz]
ν e 1
2 (
t) [
Hz]
IGT
Of
12 (
t) [
nA
/N]
IGT
Oe
12 (
t) [
nA
/N]
Resposta dos Órgãos Tendinosos de Golgi existentes nos Músculos Flexores e
Extensores, nas Regiões Articulares do Ombro e do Cotovelo
Resposta das Fibras Intrafusais Flexoras e Extensoras, nas Regiões Articulares do Ombro e do
Cotovelo
Enervação das Fibras Intrafusais Flexoras e Extensoras por parte das Unidades Motoras Gama,
nas Regiões Articulares do Ombro e do Cotovelo
γ f 12 (t) γ e 12 (t)
νf 1 (t)
νf 2 (t)
IGTOf 1
IGTOf 2
IGTOe 1
IGTOe2
νe1 (t)
νe2 (t)
Figura 3.40 – Resposta sensorial dos proprioreceptores musculares, face ao comando gama,
ensaio experimental n.º 1.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
97
-4
-2
0
2
4
6
0
0.5
1
1.5
2
2.5
0
1
2
3
4
0
0.5
1
1.5
2
4
6
8
10
12
14x 10-3
-10
-5
0
5
10
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s] 0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 2 4 6 8 10 12t[s]
x 10-3
θ cotovelo
(t)θ ombro (t)
ω ombro (t)
ω cotovelo (t)
Т cotovelo (t)
Т ombro (t)
σ cotovelo (t)
σ ombro (t)
FL f1, e1 (t)
FL f2, e2 (t)
FV f1, e1 (t)
FV f2, e2 (t)
FV
f1
f2
, e1
e2 (
t)
FL
f1
f2
, e1
e2 (
t)
Т c
oto
vel
o, o
mb
ro (
t) [
Nm
]θ
co
tov
elo,
om
bro
(t)
[ra
d]
ω c
oto
vel
o,
om
bro
(t)
[ra
d/s
]σ
co
tov
elo
, o
mb
ro (
t) [
Nm
.s/
rad
]
Relação Força - Comprimento Muscular e Força - Velocidade Muscular, em Relação aos
Grupos Musculares das Articulações do Ombro e Cotovelo
Momento de Torção e Rigidez das Articulações do Cotovelo e Ombro
Trajectória e Velocidade Angulare das Articulações do Cotovelo e
Ombro
Figura 3.41 – Trajectória e velocidade angular de cada uma das articulações; momentos de
torção e respectiva rigidez; relações força-comprimento e força-velocidade muscular, ensaio
experimental n.º 1.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
98
As trajectórias angulares descritas nos resultados anteriores, irão desta forma traduzir-se
nas trajectórias cartesianas descritas pelo sistema modelado:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0
5
10
15
20
25
30
35
14
16
18
20
22
24
26
28
30
32
34
Trajectória
X0Y cotovelo (t)
Trajectória Cartesiana da Articulação do Cotovelo
X cotovelo (t) [cm
]
t[s]
Y c
oto
vel
o (
t) [
cm]
Figura 3.42 – Trajectória cartesiana da articulação do cotovelo, ao longo do tempo, ensaio
experimental n.º 1.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0
10
20
30
40
10
15
20
25
30
35
40 Trajectória Cartesiana da Articulação do Ombro
Trajectória
X0Y ombro (t)
t[s]
X om
bro (t) [cm]
Y o
mb
ro (
t) [
cm]
Figura 3.43 - Trajectória cartesiana da articulação do ombro, ao longo do tempo, ensaio
experimental n.º 1.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
99
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0
10
20
30
40
50
60
70
30
35
40
45
50
55
60
65
70
75
Trajectória X0Y
sistema (t)
Ysi
stem
a (t
) [c
m]
Xsistem
a (t) [cm]
t[s]
Trajectória Cartesiana do Membro Superior
Humano Modelado
Figura 3.44 – Trajectória cartesiana do sistema, ao longo do tempo, ensaio experimental n.º 1.
Apesar de terem sido efectuados três ensaios experimentais, verificou-se me laboratório
que as diferenças obtidas entre o primeiro ensaio e o terceiro ensaio, são mínimas. Posto isto,
de forma a melhor ilustrar a activação muscular calculada, quando os músculos estão sujeitos
a uma menor carga (primeiro ensaio experimental) e quando sujeitos a uma carga maior
(terceiro ensaio experimental).
Os resultados obtidos para o terceiro ensaio, são os seguintes:

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
100
0
0.2
0.4
0.6
0.8
0
0.2
0.4
0.6
0.8
0
1
2
3
4
0
0.1
0.2
0.3
0.4
0
0.1
0.2
0.3
0.4
0.5
0
0.5
1
1.5
2
ue 1
2 (
t) [
mV
]a
e 1
2 (
t) [
mV
]F
Me 1
2 (
t) [
N]
FM
f 12 (
t) [
N]
af
12 (
t) [
mV
]u
f 12 (
t) [
mV
]
uf1 (t)
uf2 (t)
af1 (t)
af2 (t)
FM
f1 (t)
FM
f2
(t)
ue1 (t)
ue2 (t)
ae1 (t)
ae2 (t)
Sequência de Excitação Neuronal das Unidades Motoras Alfa referentes aos Músculos Flexor e Extensor das
Regiões Articulares do Ombro e Cotovelo
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5
t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
Sequência de Activação das Fibras Musculares Flexoras e Extensoras das Regiões Articulares do
Ombro e Cotovelo
Forças Musculars produzidas pelos Músculos Flexores e Extensores das Regiões Articulares do
Ombro e do Cotovelo
FM
e1
FM
e2
(t)
(t)
0 0.1 0.2 0.3 0.4 0.5
t[s]
Figura 3.45 - EMG adquiridos durante o ensaio experimental n.º 3 e dinâmicas de activação e
força muscular, resultantes.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
101
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
0.18
0.2
0.22
0.24
0.26
0.28
0.3
0
0.2
0.4
0.6
0.8
1
0.2
0.3
0.4
0.5
0.6
0.7
0.16
0.18
0.2
0.22
0.24
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
LM
f 1
2 (
t) [
m]
LM
e 1
2 (
t) [
m]
vM
f 1
2 (
t) [
m/s
]
vM
e 1
2 (
t) [
m/s
]
kM
f 1
2 (
t) [
Nm
/rad
]
kM
e 1
2 (
t) [
Nm
/rad
]
kM
e1 (t)
kM
e2 (t)
kM
f 1 (t)
kM
f 2 (t)
vM
f1 (t)
vM
f2 (t)
vM
e1 (t)
vM
e2 (t)
LM
e1 (t)
LM
e2 (t)
LM
f 1 (t)
LM
f 2 (t)
Variação do Comprimento das Fibras Musculares Flexoras e Extensoras, na Região Articular do Ombro
e cotovelo
Variação da Velocidade das Fibras Musculares Flexoras e Extensoras, na Região Articular do Ombro
e cotovelo
Variação da Rigidez das Fibras Musculares Flexoras e Extensoras, na Região Articular do Ombro e cotovelo
Figura 3.46 - Comprimento, velocidade e rigidez muscular, ensaio experimental n.º 3.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
102
Enervação das Fibras Intrafusais Flexoras e Extensoras por parte das Unidades Motoras Gama,
nas Regiões Articulares do Ombro e do Cotovelo
Resposta das Fibras Intrafusais Flexoras e Extensoras, nas Regiões Articulares do Ombro e do Cotovelo
Resposta dos Órgãos Tendinosos de Golgi existentes nos Músculos Flexores e Extensores,
nas Regiões Articulares do Ombro e do Cotovelo
γ e
12 (
t) [
mV
]ν e
12
(t)
[Hz]
IGT
Oe
12 (
t) [
nA/N
]
IGT
Of
12 (
t) [
nA/N
]ν f
12
(t)
[Hz]
γ f
12 (
t) [
mV
]
0 0.1 0.2 0.3 0.4 0.5t[s]
γ e 12 (t)γ f 12 (t)
νe1 (t)
νe2 (t)
νf 1 (t)
νf 2 (t)
IGTOe 1
IGTOe2
IGTOf 1
IGTOf 2
0
0.5
1
1.5
2
2.5
0
0.2
0.4
0.6
0.8
1
1.2
0
20
40
60
80
100
0
20
40
60
80
100
0.5
1
1.5
0.5
1
1.5
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
Figura 3.47 - Resposta sensorial dos proprioreceptores musculares, face ao comando gama,
ensaio experimental n.º 3.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
103
0
0.5
1
1.5
-4
-2
0
2
4
6
0
0.5
1
1.5
2
2.5
0
1
2
3
4
0 2 4 6 8 10 12
t[s]x 10
-3
2
4
6
8
10
12
14x 10 -3
-10
-5
0
5
10
0 0.1 0.2 0.3 0.4 0.5t[s] 0 0.1 0.2 0.3 0.4 0.5
t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
0 0.1 0.2 0.3 0.4 0.5t[s]
FL f1, e1 (t)
FL f2, e2 (t)
FV f1, e1 (t)
FV f2, e2 (t)
σ cotovelo (t)
σ ombro (t)
Т cotovelo (t)
Т ombro (t)
θ cotovelo (t)
θ ombro (t)
ω ombro (t)
ω cotovelo (t)
Relação Força - Comprimento Muscular e Força - Velocidade Muscular, em Relação aos Grupos Musculares das
Articulações do Ombro e Cotovelo
Momento de Torção e Rigidez das Articulações do Cotovelo e Ombro
Trajectória e Velocidade Angulare das Articulações do Cotovelo e Ombro
ω c
oto
vel
o,
om
bro
(t)
[ra
d/s
]
θ c
oto
vel
o,
om
bro
(t)
[ra
d]
Т c
oto
vel
o,
om
bro
(t)
[N
m]
FL
f1
f2
, e1
e2 (
t)
FV
f1
f2
, e1
e2 (
t)
σ c
oto
vel
o,
om
bro
(t)
[N
m.s
/rad
]
Figura 3.48 - Trajectória e velocidade angular de cada uma das articulações; momentos de
torção e respectiva rigidez; força-comprimento e força-velocidade muscular, ensaio
experimental n.º 3.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
104
As trajectórias angulares descritas nos resultados anteriores irão desta forma traduzir-se
nas seguintes trajectórias cartesianas descritas pelo sistema modelado:
00.1
0.20.3
0.40.5
0
10
20
30
40
14
16
18
20
22
24
26
28
30
32
34
Trajectória Cartesiana da Articulação do Cotovelo
Trajectória X0Y
cotovelo (t)
0.050.15 0.25
0.350.45
t[s]
X cotovelo (t) [cm
]
Y c
otov
elo
(t)
[cm
]
Figura 3.49 - Trajectória cartesiana da articulação do cotovelo, ao longo do tempo, ensaio
experimental n.º 3.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
10
20
30
40
10
15
20
25
30
35
40
t[s]
Trajectória X0Y
ombro (t)
Y o
mbro
(t)
[cm
]
X om
bro (t) [cm]
Trajectória Cartesiana da Articulação do Ombro
Figura 3.50 - Trajectória cartesiana da articulação do ombro, ao longo do tempo, ensaio
experimental n.º 3.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
105
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0
10
20
30
40
50
60
70
30
35
40
45
50
55
60
65
70
75 Trajectória Cartesiana do Membro Superior Humano Modelado
Trajectória X0Y
sistema (t)
Ysi
stem
a (t
) [c
m]
Xsistem
a (t) [cm]
t[s]
Figura 3.51 - Trajectória cartesiana da articulação do sistema, ao longo do tempo, ensaio
experimental n.º 3.
3.5.3 Análise Comparativa
De modo a avaliar o desempenho do modelo depois de validado, foi determinado o
erro quadrático médio, também denominado teste do qui-quadrado, associado ao modelo:
(3.35)
onde yvalidação corresponde aos dados obtidos do modelo após validado e ymodelo corresponde
aos dados obtidos pela simulação numérica. N corresponde ao número de amostras obtidas
durante o tempo total de simulação, que neste foi de 0,5 s, pelo que se obteve 500 amostras.
Uma vez que a análise EMG levada a cabo nos ensaios experimentais, permitiu apenas
validar directamente a activação muscular e, consequentemente, a força muscular, como

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
106
análise comparativa directa, entre os sinais ―reais‖ e os obtidos pelo modelo desenvolvido,
apenas os erros quadráticos associados à força muscular foram analisados.
As evoluções temporais de cada erro são de seguida ilustradas, de forma a melhor se
compreender as diferenças entre resultados obtidos pelo modelo, e pelos ensaios
experimentais, em cada um dos casos analisados:
Figura 3.52 – Evolução temporal dos erros associados de cada uma das forças musculares do
subsistema articular do cotovelo.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
107
Figura 3.53 – Evolução temporal dos erros associados de cada uma das forças musculares do
subsistema articular do ombro.
Os resultados obtidos ilustram que as diferenças entre as forças musculares obtidas
pelo modelo desenvolvido, face aos resultados dos ensaios experimentais, são maiores no
grupo muscular relativo ao subsistema articular do cotovelo, em particular para o grupo
flexor. Contudo, apesar de em menor amplitude, a variação do erro, é mais acentuada para os
resultados obtidos para o grupo muscular deltóide.

CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA NEURO-MÚSUCULO-ESQUELÉTICO
Página
108
É possível observar que, os valores do erro quadrático médio para os grupos
musculares extensores do ombro e cotovelo, são praticamente os mesmos, graficamente. Em
termos numéricos diferem na quarta casa decimal, não se reflectindo graficamente.
Quadro 3.3 – Valor médio do erro e a sua variância, em relação às quatro forças musculares,
ensaio experimental n.º1
Quadro 3.4 – Valor médio do erro e a sua variância, em relação às quatro forças musculares,
ensaio experimental n.º3
Os valores médios de erro quadrático obtidos nesta tabela, revelam o que já tinha sido
ilustrado graficamente, ou seja, o erro é maior no grupo muscular do subsistema articular do
cotovelo. A variância entre os dados obtidos na validação e no modelo numérico é bastante
pequena, o que permite classificar o desempenho do modelo desenvolvido, em termos
estatísticos, como bastante satisfatório e de boa fiabilidade.
Ensaio Experimental n.º 1
Força
Muscular do
bicípete
braquial
Força
Muscular do
tricípete
braquial
Força
Muscular
do Deltóide
Anterior
Força
Muscular do
Deltóide
Posterior
Valor Médio 3,0x10-7
3,6x10-1
1,7x10-7
1,7x10-1
Variância 1,9x10-13
1,7x10-1
3,5x10-14
5,5x10-2
Ensaio Experimental n.º 3
Força
Muscular do
bicípete
braquial
Força
Muscular do
tricípete
braquial
Força
Muscular
do Deltóide
Anterior
Força
Muscular do
Deltóide
Posterior
Valor Médio 4,0x10-7
3,6x10-1
1,8x10-8
1,7x10-1
Variância 2,5x10-13
1,7x10-1
5,0x10-16
5,5x10-2

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
109

Página
110
CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICIAIS
Com vista a controlar voluntariamente o movimento de um dos membros superiores
humanos, estudou-se a aplicação de metodologias de controlo inteligente, neste contexto.
Sumariamente, pretende-se com este capítulo ilustrar essas metodologias, através da
simulação e implementação de algoritmos de controlo inteligente, que seriam futuramente
implementados numa prótese exoesquelética (e.g. ―Hall Project‖ - projecto japonês dedicado à
maximização de força humana, por meio de uma prótese exoesquelética aplicada a todo o
corpo do individuo, vd. Figura 4.1), aplicada ao membro do doente, através de uma estrutura
de hardware apropriada. Esta estrutura permitiria ao doente o controlo voluntário dos seus
movimentos.
O algoritmo de controlo inteligente deve admitir todas as dinâmicas associadas ao
sistema neuro-músculo-esquelético humano e, com base nestas dinâmicas, garantir que a
referência de movimentos transmitida pelo doente seja garantida. Após o modelo numérico ter
sido testado e validado, implementa-se uma estratégia de controlo, por retroacção, em cascata
com o modelo. Desta forma, devido à inexistência de um processo físico a controlar, o
sistema será desta forma o modelo neuro-músculo-esquelético do membro superior humano,
desenvolvido e descrito no capítulo 3.
Como estratégia de controlo utilizou-se o controlo neuronal, na medida em que estes
controladores apresentam bons desempenhos, quando o sistema a controlar apresenta níveis
elevados de complexidade, assim como não linearidades, utilizando para tal redes neuronais
artificiais na determinação das suas acções de controlo. O facto das dinâmicas neuro-músculo-
esqueléticas apresentarem estas características, justifica a utilização deste tipo de estratégia.

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
111
Figura 4.1 – Hall Project.12
4.1 O Neurónio Artificial
As redes neuronais artificiais constituem hoje um domínio científico formado por
diversos modelos que procuram emular determinadas funções do cérebro humano,
reproduzindo algumas das suas estruturas básicas por intermédio de neurónios artificiais (H.
D. Ramos, 2002).
O primeiro modelo de neurónio foi proposto em 1943, por McCulloch e Pitts, inspirados
nos trabalhos desenvolvidos com neurónios biológicos. Este modelo de McCulloch-Pitts era
um neurónio artificial que efectuava a soma ponderada dos potenciais de acção recebidos
(valores representativos das emissões de outros neurónios), activando-se consoante o valor da
soma ponderada: se excedia o limiar, o neurónio era activado e fornecia um potencial de
acção (resposta igual à sua activação), caso contrário permaneceria inactivo (J. Diederich,
1990).
O modelo de neurónio contempla os seguintes elementos fundamentais:
Entradas: Constituem o vector u = [u1 u2 … ui] T
quer de natureza real
(potenciais de acção) quer de natureza binária;
12
http://sanlab.kz.tsukuba.ac.jp/HAL/indexE.html

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
112
Pesos Sinápticos: Constituem as ponderações w = [w1 w2 … wi] positivas nas
conexões excitadoras e negativas em conexões inibidoras, sendo nulo o peso
quando não existir conexão com o respectivo elemento de processamento;
Polaridade: Limiar de activação b do elemento de processamento, equivalente a
uma entrada u0 = 1 e wo = -b;
Estado de Activação: Condição x(u,w) de excitação do elemento de
processamento conforme a função entre as entradas e os pesos;
Função de Activação: Relação σ(x) que define o comportamento do elemento
de processamento em função do seu estado interno total;
Saída: Resposta y = σ(u,w) do neurónio resultante do processamento interno sob
excitação das entradas ponderadas.
∑ f
Elemento ProcessadorEntradas
pw n a
a = f(wp+b)
b
Figura 4.2 - Modelo do neurónio artificial com apenas uma entrada e uma saída.
Uma rede neuronal é composta por uma ou mais camadas. Cada camada irá conter m
elementos de processamento, resultando em m saídas que formam o vector de saída y = [y1, y2,
…, ym]. Desta forma, cada neurónio artificial recebe os sinais de entrada ui com i = 1, 2, …, n,
com os pesos wi (H. D. Ramos, 2002). Cada elemento do processamento da rede neuronal
executa a operação imposta pela função de activação consoante o seu estado interno. No caso

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
113
mais vulgar o estado interno total corresponde à ―combinação linear‖ das entradas com os
pesos.
(4.1)
Uma vez que, u0 = 1, 4.1 pode ser reescrita como xi = un wni + b, onde o peso de
polaridade w0i = -b traduz a ―deslocação na origem‖ da função de activação e dai a designação
de polaridade do elemento de processamento (E. S. e C. Lau, 1992). Assim a saída será dada
por:
(4.2)
σ(.)∑
u1
yw2
w1
wm
x
b
u2
um
.
.
.
Figura 4.3 - Modelo do neurónio artificial com m entradas e uma saída.
Existem diversas funções de activação de sinais neuronais que convém observar em
pormenor:
Quadro 4.1 – Exemplos de funções de activação neuronal
Função de Activação Expressão Matemática
Bipolar
Linear
Sigmóide

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
114
Tangente Hiperbólica
Logística ,
Gaussiana
A maioria das redes neuronais utiliza uma das funções de activação básicas atrás
descritas, geralmente não-lineares, de modo a introduzirem um limiar na saída dentro de uma
gama pré-fixada do estado interno x = wu, (H. D. Ramos, 2002).
4.2 Topologias Neuronais
Tendo em conta o modelo funcional proposto para o neurónio artificial, há que ter em
conta a topologia inerente às redes neuronais utilizadas, de entre as quais:
1. Redes Monocamada: As redes neuronais monocamada dispõem de uma única camada,
com os elementos processadores ―completamente intraconectados‖ (vd. Figura 4.4 a)
ou ―parcialmente intraconectados‖ (vd. Figura 4.4 b). Foi o primeiro modelo a ser
proposto, baseado no perceptrão, que revelou limitações de cálculo e veio a suscitar o
desenvolvimento de sistemas com mais camadas interconectadas;
2. Redes Multicamada: Estas estruturas possuem duas ou mais camadas de elementos
processadores interconectados (podendo existir eventuais intraconexões). Contêm uma
camada de entrada, uma ou várias camadas escondidas, que se encontram no interior
da rede, e uma camada de saída (vd. Figura 4.4 c). No caso mais simples da dupla
camada, não há qualquer camada escondida (vd. Figura 4.4 d).
As arquitecturas das redes neuronais podem ser proactivas ou recorrentes:
1. Rede Neuronal Proactiva: As conexões entre camadas têm um único sentido da
entrada para a saída (vd. Figura 4.4 c), dependendo os valores das saídas apenas das
entradas e dos pesos atribuídos a essas conexões, consoante a função de activação.

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
115
Tratando-se de um controlo neuronal em anel aberto, resulta sempre numa rede estável
embora com saída imprevisível;
2. Rede Neuronal Retroactiva: Além das conexões proactivas, a rede neuronal contém
também conexões retroactivas, isto é, de um elemento processador de uma camada para
os elementos processadores da camada anterior, donde resulta um controlo neuronal em
anel fechado.
1
2
u1
u2
nun
y
1
2
3
u1
u2
u3 y3
y2
y11
2
3
u1
u2
u3 y3
y2
y1
(…)
1
2
u1
u2
nun
(…)
y1
y2
a)b) c)
d)
Figura 4.4 – Topologia Neuronal: a) Monocamada completamente intraconectada; b)
Monocamada parcialmente intraconectada; c) Proactiva de três camadas e d) Dupla camada
retroactiva (adaptado de H.D. Ramos, 2002).
As redes neuronais retroactivas podem funcionar recorrentemente e criar memórias
associativas (usadas no reconhecimento de padrões ou de voz). Se as saídas ficarem em
cálculo permanente, diz-se que há ―instabilidade‖. Todavia, verifica-se que há ―estabilidade‖
quando a matriz dos pesos sinápticos for simétrica em relação à sua diagonal principal com
todos os seus elementos nulos.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
116
4.3 Controlo Neuronal
O controlo de sistemas não lineares é um assunto que actualmente tem atraído grande
interesse nas áreas académica e industrial. Técnicas de controlo clássico (controladores
proporcionais, PD, PID) são baseadas em modelos linearizados dos sistemas físicos, o que
representa perda de informações, que muitas vezes são importantes para o funcionamento da
instalação com altos níveis de exigência. A utilização do denominado controlo inteligente tem
aberto uma nova perspectiva no tratamento de sistemas não lineares e no projecto de seus
controladores. Na tentativa de desenvolver um controlo mais versátil e robusto, muitos
trabalhos na ária do controlo inteligente foram desenvolvidos ao longo da última década.
Neste sentido as redes neuronais artificiais pertencem às técnicas mais utilizadas para a
implementação de um controlador inteligente.
Diversos estudos demonstraram o potencial das redes neuronais artificiais na área do
controlo de processos dinâmicos (Hunt, et al., 1992; Bouani, et al., 2004). As vantagens na
utilização de redes neuronais artificias em controlo e automação residem nas suas
características principais: capacidade de aproximar funções não lineares, capacidade de
generalização, robustez na presença de ruído e distúrbios de carga, robustez quando existem
incertezas nos parâmetros da planta ou quando existem dinâmicas não modeladas (Narendra e
Parthasaranthy, 1990; Faouzi, et al., 2004). Os modelos obtidos através de redes neuronais
permitem levar em consideração as não linearidades do processo (Hunt, et al., 1992; Bouani,
et al., 2004).
No presente subcapítulo, far-se-á referência à arquitectura típica de controlo neuronal,
assim como as estratégias de controlo existentes, incluindo a utilizada no presente trabalho.
4.3.1 Arquitectura Geral de Controlo Neuronal
A arquitectura genérica de uma rede neuronal com treino e recuperação para controlo de
um dado sistema, implica o processamento nas fases de aprendizagem e de recuperação dos
pesos na memória associativa, atendendo à codificação de normação das entradas e

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
117
descodificação na desnormação das saídas (H. D. Ramos, 2002), como ilustra a figura
seguinte:
Sistema Controlado
Rede Neuronal
(fase de recuperação)Desnormação de saídaNormação de Entrada
Memória Associativa
(ficheiro de pesos optimizados)
Rede Neuronal
(fase de aprendizagem)
Algoritmo de Aprendizagem
(actualização dos pesos)
Normação de sinais e selecção do
padrão de treino
(-)
u(k) yd(k)
u(k) y(k) y(k)
Figura 4.5 - Arquitectura de rede neuronal com treino e recuperação (adaptado de H. D.
Ramos)
O mapeamento de padrões nas entradas do sistema para as suas saídas estabelece-se de
forma não linear, realizando-se por intermédio de uma rede neuronal multicamada com
muitos elementos processadores não lineares.
Contudo deve notar-se que o projecto de arquitectura da rede neuronal, a selecção das
amostras do padrão de treino e a concepção das estratégias de aprendizagem são críticas para
fazer um trabalho satisfatório com a rede neuronal. O problema fundamental da
implementação das redes neuronais, reside no facto de fazer com que a rede neuronal
apresente a referida capacidade de generalização.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
118
4.3.2 Estratégias de Controlo Neuronal
No presente subcapítulo referem-se as principais estratégias de controlo neuronal de
sistemas dinâmicos não lineares, tendo em conta as características subjacentes a este tipo de
controladores inteligentes.
4.3.2.1 Controlo Neuronal Adaptativo Directo
Numa arquitectura de controlo adaptativo directo, os parâmetros do controlador são
ajustados, tal como o nome indica, directamente, de forma a minimizar o erro entre a saída
desejada e a saída da instalação. O esquema de controlo realiza um modelo explícito do
controlador desejado, pelo que devido a este facto, esta arquitectura (vd. Figura 4.6) é também
designada de MRAC – Model Reference Control or Neural Adaptive Control, (Hagan e
Demuth, 1999).
Este modelo neuronal do sistema pode ser treinado em diferido, utilizando um histórico
de dados coligidos da instalação. Desta forma, o controlador força a saída da instalação a
seguir uma dada referência, imposta pelo modelo neuronal. Desta forma, o modelo é utilizado
como preditor do efeito que o controlador induz na dinâmica de saída da instalação,
permitindo a actualização dos parâmetros do controlador (Hagan e Demuth, 1999).
Modelo Neuronal
da Instalação
InstalaçãoControlador
Neuronal
Modelo de
Referência+
-
Referência
Acção
de Controlo
Erro do Controlador
Erro da Instalação
Erro do Modelo
+
Figura 4.6 – Arquitectura de controlo adaptativo directo.

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
119
4.3.2.2 Controlo Neuronal Adaptativo Indirecto
Numa arquitectura de controlo adaptativo indirecto ou por modelo inverso, os
parâmetros do controlador são ajustados com base na estimativa das saídas da instalação, pelo
que a escolha do controlador recai na melhor conformidade entre os parâmetros estimados e
os valores ―verdadeiros‖ dos parâmetros da instalação. O esquema de controlo adaptativo
indirecto, tal como o seu homólogo directo, utiliza um modelo neuronal da instalação para a
síntese da sua lei de controlo, utilizando para tal uma optimização pré-definida ou cálculo de
inversão (vd. Figura 4.7), (Hagan e Demuth, 1999; H.D. Ramos, 2002).
O modelo básico de referência nesta estratégia de controlo pode ser facilmente afectado
através da introdução de ruído gaussiano ou perturbações externas na instalação, causando
singularidades na aproximação à dinâmica real. Uma alternativa consiste em introduzir um
modelo neuronal da instalação em paralelo com a mesma. Esse modelo é treinado com as
mesmas entradas que o sistema a controlar, de forma a produzir exactamente as mesmas
saídas. A diferença existente nas saídas obtidas, irá reflectir o efeito do ruído e das
perturbações na instalação, admitindo o princípio da equivalência certa. As saídas da
instalação corrompidas com as referidas perturbações irão treinar um seu modelo neuronal
inverso, modelo este que irá realizar uma filtragem digital do ruído e perturbações existentes,
sendo posteriormente subtraído à entrada da instalação (Hagan e Demuth, 1999). O objectivo
primordial é então o de cancelar os efeitos de perturbações externas, que iriam alterar o efeito
de controlo.
Modelo Neuronal
da Instalação
InstalaçãoControlador
Neuronal+
-
Referência
Acção
de Controlo
Ruído do Sensor
Perturbações à
saída da
Instalação
Saídas da
Instalação
+
Modelo Neuronal
Inverso
Algoritmo de
Adaptação
Modelo de
Referência
+
Erro propagado
-
+
+-
Figura 4.7 – Arquitectura de controlo adaptativo indirecto.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
120
4.3.2.3 Controlo Neuronal por Modelo Interno
A estratégia de controlo IMC (Internal Model Control) foi originalmente proposta para
sistemas lineares, descritos por funções de transferência (P. Larminat, 1993), depois estendido
a sistemas não lineares (C. Economou, et al., 1986; Henson e Seborg, 1991). O IMC
apresenta as seguintes vantagens: é intuitivamente simples, fácil de implementar, e o único
parâmetro a sintonizar é relativo ao filtro passa-baixo. Contudo, o IMC apenas pode ser
utilizado em sistemas de malha fechada estáveis (Colin, et al., 2007). Devido à estrutura do
IMC (vd. Figura 4.8) o efeito integral está implícito no controlador.
O sistema de controlo não-linear por modelo interno (Nonlinear Internal Model Control
– NIMC) ilustrado na figura 4.8, é constituído por um controlador neuronal, um modelo
neuronal da instalação a controlar, e um filtro passa-baixo à entrada do controlador (E. Nahas,
et al., 1992). A rede neuronal do controlador é geralmente treinada de forma a representar a
dinâmica inversa da instalação, caso esta seja invertível (Hagan e Demuth, 1999). O filtro
deverá apresentar uma dinâmica adequada (estável) e ganho estático unitário, sendo utilizado
de modo a evitar mudanças bruscas na entrada do controlador, contribuindo assim para a não
ocorrência de fenómenos de saturação (Hagan e Demuth, 1999). Geralmente o filtro utilizado
é de primeira ordem, cuja constante de tempo é seleccionado de forma a assegurar a
estabilidade do anel fechado.
O modelo neuronal e o controlador (se representar um modelo inverso da instalação)
podem ser treinados em diferido, utilizando os dados de operação coligidos do processo (ou
instalação).
O desempenho deste controlador é estritamente dependente da exactidão do modelo
neuronal, do qual depende o projecto do controlador (Isabelle Rivals e Léon Personnaz,
2000). Caso o modelo não responda às perturbações a que a instalação está sujeita, poderá
ser susceptível a incoerências, nomeadamente, erros de sobreajuste, erros de desvio, não
seguimento de referência, parâmetros de sintonização ou regulação não apropriados, entre
outros. Se o modelo for exacto e não ocorrerem perturbações sobre o sistema, o erro é nulo e
esta estrutura reduz-se a uma arquitectura MRAC, caso contrário, manipula-se a referência
de modo a compensar tal efeito.

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
121
Modelo Neuronal
da Instalação
InstalaçãoControlador
NeuronalFiltro
+
-
ReferênciaAcção
de Controlo
Saída
Estimada
da
Instalação
Saída da Instalação
+
-
Erro de
Predição
Figura 4.8 – Arquitectura de controlo neuronal por modelo interno.
4.3.2.4 Controlo Neuronal por Modelo Preditivo
O controlador neuronal por modelo preditivo (MPC - Model Predictive Control)
ilustrado na figura 4.9, optimiza a resposta da instalação, num determinado horizonte tempo
especificado (Hunt, et al., 1992). Esta arquitectura requer um modelo neuronal do sistema, um
controlador neuronal, um critério de desempenho para avaliar as respostas do sistema e um
procedimento de optimização de forma a seleccionar o sinal de entrada do controlador.
O preditor neuronal é utilizado no seio da estrutura de optimização (vd. Figura 4.9)
através da qual, e em função do critério de desempenho adoptado, é gerada uma sucessão de
acções de controlo {u(k)}, com base na informação disponível na malha de controlo. Quando
o treino neuronal finaliza, a fase de optimização pode ser completamente substituída pelo
controlador neuronal.
Modelo Neuronal
da Instalação
InstalaçãoControlador
Neuronal
Modelo de
Referência
Referência
Acção
de Controlo
Malha de Optimização
Saída da Instalação
Saída Estimada
da Instalação
Optimização
Figura 4.9 – Arquitectura de controlo neuronal por modelo preditivo.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
122
4.4 Simulação Dinâmica em Anel Fechado
Tal como foi descrito anteriormente, a capacidade de aproximação universal inerente
às redes neuronais, foi fundamental na escolha destas para este trabalho. A não-linearidade
do modelo desenvolvido justifica assim a sua utilização, de forma a ser possível
implementar uma estratégia de controlo estável e robusta. Interessa assim implementar um
controlador neuronal em cascata com o modelo numérico desenvolvido. Este controlador
deve ser capaz de minimizar o erro e(k) entre referência (trajectórias angulares escolhidas
pelo operador) e saídas obtidas da instalação (saídas do modelo):
Ref = {θ(k)cotoveloreferência
; θ(k)ombroreferência
}
(4.3)
A estratégia de controlo IMC foi assim proposta como solução para o problema de
controlo em causa, visto ser relativamente simples, fácil de implementar e resumir-se apenas
a um único parâmetro de sintonização: a frequência de corte do filtro passa-baixo (vd. Figura
4.10).
Filtro
-
Modelo Neuro-Músculo-Esquelético
-
INSTALAÇÃO
Controlador Neuronal
Modelo Interno
Neuronal
y(k) {u (k)} {Ref(k)}
{Refm
(k)}
{e(k)}
{yNN(k)}
{em
(k)}
Figura 4.10 – Arquitectura de Controlo Neuronal IMC implementada no modelo numérico
desenvolvido.

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
123
O modelo neuronal da instalação a controlar, é treinado de modo a representar as
dinâmicas do modelo neuro-músculo-esquelético do membro superior humano (instalação)
desenvolvido, enquanto a rede neuronal do controlador é treinada de forma a representar a
dinâmica inversa deste, que se mostra ser invertível. Desta forma os vectores de entrada de
ambas as redes são dados pelas seguintes sucessões:
(4.4 a, b)
com i = flexor, extensor e j = cotovelo, ombro. Para o treino das redes neuronais tanto do
controlador como do modelo interno foi utilizado o algoritmo de Levenberg-Marquardt. Uma
vez que a sua implementação é baseada em cálculo matricial, tendo em conta a utilização do
software Matlab para simular a estratégia de controlo IMC, a utilização do algoritmo de
Levenberg-Marquardt torna-se ainda mais eficiente, justificando a sua utilização face ao
método de retropropagação do erro (―backpropagation‖) convencional.
A arquitectura genérica das duas redes neuronais utilizadas é do tipo proactivo
multicamada com vários elementos processadores (neurónios) não lineares, utilizando uma
função tangente hiperbólica (tansig) como função de activação. Estas são constituídas por três
camadas: uma pseudo-camada de entrada, uma camada interna e uma camada de saída. No
caso da rede neuronal do modelo interno, esta apresenta doze neurónios na camada de
entrada, uma vez que tem doze sinais de entrada e dois neurónios na camada de saída, pois
tem dois sinais de saída. No caso da rede neuronal do controlador, apresenta oito entradas e
quatro saídas, o que equivale respectivamente a oito neurónios na camada de entrada e quatro
neurónios na camada de saída. A escolha do número óptimo de neurónios da camada interna
de cada uma das redes, foi escolhido com base na menor diferença entre entradas e saídas da
rede neuronal (vd. Figura 4.17).
A implementação do treino das redes, efectuada em Matlab, consistiu em determinar
qual o melhor número de elementos processadores na camada interna de ambas as redes,
assim como na escolha da função de activação mais adequada, e o número de épocas de
treino. Ambas as redes neuronais foram sujeitas às mesmas condições de treino:

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
124
Quadro 4.2 – Parâmetros numéricos utilizados no treino neuronal
Erro médio quadrático máximo a
considerar: 10
-6
Número de épocas de treino: 5000
Intervalo entre épocas: 10
Algoritmo de treino: Algoritmo de Levenberg-Marquardt
Função de activação: Tangente Hiperbólica
Número máximo de neurónios a
treinar na camada intermédia: 10
Número máximo de simulações a
que cada neurónio é sujeito: 20
Uma vez que são redes com treino e recuperação para controlo de um dado sistema, é
necessário proceder-se à normação e desnormação das suas entradas e saídas. Os dados a
processar por ambas as redes resumem-se às saídas de excitação neuromotora alfa, e às
trajectórias angulares de ambas as articulações que constituem o modelo numérico
considerado para o braço humano. Uma vez que a sequência de excitação neuromotora
apresenta um valor máximo de 1 mV não foi necessário proceder à sua normação, ao
contrário das trajectórias angulares, que podem assumir valores até π radianos. Desta forma,
os ângulos relativos ao ombro e cotovelo, foram normalizados entre 0 e 1 radianos.
Nas figuras seguintes apresentam-se os conjuntos de dados de estimação e validação
utilizados para o treino de ambas as redes.

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
125
0 100 200 300 400 500 6000
0.2
0.4
0.6
0.8
1
Dados de estimação referentes à excitação neuromotora alfa do
flexor do cotovelo
t[s]
uf1
m (
t) [
V]
0 100 200 300 400 500 6000
0.1
0.2
0.3
0.4
0.5
Dados de estimação referentes à excitação neuromotora alfa do
extensor do cotovelo
t[s]
ue1 m
(t)
[V
]
0 100 200 300 400 500 6000
2
4
6
8
10
Dados de estimação referentes à excitação neuromotora alfa do
flexor do ombro
t[s]
uf2
m (
t) [
V]
0 100 200 300 400 500 600
0
2
4
6
8
10
Dados de estimação referentes à excitação neuromotora alfa do
extensor do ombro
t[s]
ue2 m
(t)
[V
]
x10-2 x10-2
Figura 4.11 – Conjunto de dados de Estimação.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
126
0 100 200 300 400 500 6000
0.2
0.4
0.6
0.8
1
Dados de validação referentes à excitação neuromotora alfa do
flexor do cotovelo
t[s]
uf1
v (
t) [
V]
0 100 200 300 400 500 6000
0.1
0.2
0.3
0.4
0.5
Dados de validação referentes à excitação neuromotora alfa do
extensor do cotovelo
t[s]
ue1 v
(t)
[V
]
0 100 200 300 400 500 6000
2
4
6
8
10
Dados de validação referentes à excitação neuromotora alfa do
flexor do ombro
t[s]
uf2
v (
t) [
V]
0 100 200 300 400 500 6000
1
2
3
4
5
6
7
8
Dados de validação referentes à excitação neuromotora alfa do
extensor do ombro
t[s]
ue2 v
(t)
[V
]
Figura 4.12 – Conjunto de dados de Validação.
A riqueza dos dados gerados em relação à sequência de excitação neuromotora alfa é
bastante vaga, uma vez que a sua complexidade é elevadíssima, e aparentemente impossível
de determinar quais seriam os melhores conjuntos de treino. A inacessibilidade a estes dados
demonstra assim uma das limitações deste trabalho.
Tendo em conta a proactividade destas redes, é determinado o seu vector de entrada
com base em entradas e saídas passadas. Para tal, é utilizada uma topologia neuronal
regressora em que a determinação do número de amostras passadas da saída e da entrada que
são fornecidos à estrutura neuronal, é conseguida por tentativa e erro.

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
127
Desta forma, de acordo com os parâmetros de treino atrás apresentados, foram treinadas
as duas redes neuronais, tendo-se obtido os seguintes resultados:
0 50 100 150 200 250 300 350 400 450 5000
0.2
0.4
0.6
0.8
1
1.2
1.4
t[s]
θco
tov
elo
net (
t) e
θco
tov
elom
od
elo (
t) [
rad
]
θo
mb
ron
et (
t) e
θo
mb
rom
od
elo (
t) [
rad]
Ângulos Articulares obtidos à saída do Modelo Interno da
Instalação
θcotovelonet
θombronet
θcotovelom.
θombrom.
Figura 4.13 – Resultados do treino neuronal do modelo interno.
Face aos resultados obtidos, os erros quasdráticos médios associados ao treino da rede
neuronal do modelo interno da instalação, apresentam as seguintes evoluções temporais:
0 50 100 150 200 250 300 350 400 450 500-1.5
-1
-0.5
0
0.5
1
1.5
t[ms]
0 50 100 150 200 250 300 350 400 450 500-6
-4
-2
0
2
4
6
t[ms]
Err
o2
[t]
Err
o1
[t]
Diferença entre a saída obtido no modelo neuronal interno e o sinal de saída da
instalação, relativamente à trajectória articular do cotoveloDiferença entre a saída obtido no modelo neuronal interno e o sinal de saída da
instalação, relativamente à trajectória articular do ombro
x 10-4
x 10-2
Figura 4.14 – Variação temporal dos erros quadráticos médios, associados ao treino neuronal
do modelo interno da instalação.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
128
Como seria de esperar, os resultados obtidos ilustram a fiabilidade do modelo, após o
treino neuronal. Os baixos valores de erro reflectem assim o bom seguimento obtido pelo
modelo interno.
Posto isto, procede-se ao treino neuronal do controlador:
0 50 100 150 200 250 300 350 400 450 500-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t[ms]
uco
tov
elo
flex
or
net (t
) e
uco
tov
elo
flex
or
vali
dação
(t)
[
V]
Acção de Controlo para o músculo flexor
do cotovelo
u1f
net
u1f
v
0 50 100 150 200 250 300 350 400 450 5000
0.1
0.2
0.3
0.4
0.5
t[ms]
0 50 100 150 200 250 300 350 400 450 500-2
0
2
4
6
8
10
t[ms]
0 50 100 150 200 250 300 350 400 450 5000
1
2
3
4
5
6
7
8
t[ms]
Acção de Controlo para o músculo extensor do
cotovelo
Acção de Controlo para o músculo extensor do ombroAcção de Controlo para o músculo flexor do ombro
u1e
net
u1e
v
u2f
net
u2f
v u2
e v
u2e
net
uco
tov
elo
ex
ten
so
r n
et (t
)
e
uco
tov
elo
ex
ten
so
r v
ali
dação
(t)
[
V]
uo
mb
rofl
ex
or
net (t
)
e
uo
mb
rofl
ex
or
vali
dação
(t)
[
V]
uo
mb
roex
ten
so
r n
et (t
)
e
uo
mb
roex
ten
so
r v
ali
dação
(t)
[
V]
x10-2 x10-2
Figura 4.15 – Resultados do treino neuronal do controlador.

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
129
0 50 100 150 200 250 300 350 400 450 500-0.3
-0.2
-0.1
0
0.1
0.2
0.3
t[ms]
0 50 100 150 200 250 300 350 400 450 500
-4
-3
-2
-1
0
1
2
3
t[ms]
0 50 100 150 200 250 300 350 400 450 500
-20
-15
-10
-5
0
5
10
15
t[ms]
0 50 100 150 200 250 300 350 400 450 500
-10
-8
-6
-4
-2
0
2
4
6
t[ms]
Err
o1
[t]
Err
o3
[t]
Err
o4
[t]
Err
o2
[t]
Diferença entre a saída obtido na rede treinada para o
controlador e a excitação neuromotora do músculo extensor
do cotovelo
Diferença entre a saída obtido na rede treinada para o
controlador e a excitação neuromotora do músculo flexor
do cotovelo
Diferença entre a saída obtido na rede treinada para o
controlador e a excitação neuromotora do músculo flexor
do ombro
Diferença entre a saída obtido na rede treinada para o
controlador e a excitação neuromotora do músculo extensor
do ombro
x10-2
Figura 4.16 - Variação temporal dos erros quadráticos, associados ao treino neuronal do
controlador.
Conclui-se que o número ideal de elementos processadores é igual a dois para a rede
neuronal do modelo interno e de 2 neurónios para a rede neuronal do controlador. Os
resultados obtidos no treino neuronal do modelo interno são bastante satisfatórios, na medida
em que a dinâmica da instalação é convencionalmente capturada, obtendo-se à sua saída,
aproximadamente as mesmas trajectórias angulares. Quanto aos resultados obtidos após o
treino da rede neuronal a utilizar pelo controlador, verifica-se a existência de uma taxa de erro
algo elevada. Uma vez que não é possível saber qual deverão ser os dados mais apropriados,
devido à complexidade inerente à sequência de excitação neuromotora alfa, torna-se árdua a
tarefa de estimar alguns dados passados, o que levaria à melhoria do controlador neuronal.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
130
1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Número de Neurónios
So
ma
do
s E
rro
s Q
uad
rad
os
Selecção do melhor número de neurónios a constar na camada escondida
1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
14x 10
6
Número de Neurónios
So
ma
do
s E
rro
s Q
uad
rad
os
Selecção do melhor número de neurónios a constar na camada escondida
Figura 4.17 – Gráficos de Barras ilustrando o número óptimo de neurónios artificiais a utilizar
na camada interna.
Obedecendo à arquitectura de controlo IMC, o erro e(k) entre a saída do modelo
neuronal da instalação e as saídas da instalação, são utilizados como retroacção de entrada no
filtro projectado, que por sua vez é acoplado ao controlador neuronal. Contudo uma vez que
não existe nenhum processo físico, mas sim um modelo numérico no seu lugar, existe apenas
uma simulação do controlador. Após o treino de ambas as redes, e tendo sido implementada
toda a arquitectura neuronal IMC, foram injectados os seguintes sinais de referência,

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
131
correspondentes às trajectórias angulares desejadas à saída da instalação. Os resultados
obtidos foram os seguintes:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
t[s]
θom
bro
Ref
(t)
e θ
om
bro
Out (
t) [
rad]
θombroRef
θcotoveloRef
θcotoveloOut
θombroOut
Ângulos Articulares obtidos à saída da Instalação Controlada
Figura 4.18 – Trajectórias de referência e trajectórias obtidas à saída da instalação, com a
arquitectura IMC implementada.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
132
Quanto às acções de controlo, estas encontram-se ilustradas nas figuras que se seguem:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
t[s]
u f1 (
t) [
V]
Acção de controlo para o músculo flexor do cotovelo
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.05
0.1
0.15
0.2
2.5
3
t[s]
ue1
(t)
[V
]
Acção de controlo para o músculo extensor do cotovelo
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.5
1
1.5
2
2.5
t[s]
u f2 (
t) [
V]
Acção de controlo para o músculo flexor do ombro
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
t[s]
ue2
(t)
[V
]
Acção de controlo para o músculo extensor do ombro
x10-2
x10-3x10-2
Figura 4.19 – Sinais de acção de controlo, gerados pelo controlador neuronal IMC
implementado.
Os sinais de controlo gerados pelo controlador, representam impulsos eléctricos quase
instantâneos, emulando assim os impulsos nervosos de excitação neuromotora, gerados ao
nível dos neurónios motores alfa. Desta forma, o controlador envia uma sequência de
comando à instalação, que neste caso irá permitir que a arquitectura neuro-músculo-
esquelética modelada obtenha à sua saída os movimentos angulares requeridos (vd. Figura
4.18). A arquitectura IMC implementada garante um bom seguimento de referência, apesar da
existência de granularidades aquando do treino da rede neuronal do controlador.
As trajectórias de referências são adequadamente reproduzidas apesar do reduzido
desvio. Melhorias são necessárias, fazendo parte de trabalho futuro a desenvolver em
conjunto com outras áreas da ciência, nomeadamente da engenharia física e/ou biomédica e
da medicina.

CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICAIS
Página
133

Página
134
CAPÍTULO 5 – CONCLUSÕES E TRABALHO FUTURO
Neste capítulo, apresentam-se as conclusões finais da presente dissertação, bem como as
avaliações às hipóteses e métodos apresentados no inicio deste documento. Resumem-se as
ideias e contribuições principais do trabalho e consideram-se igualmente ideias de
investigação complementares.
5.1 Conclusões
O objectivo principal deste trabalho foi conseguido com sucesso, na medida em que foi
desenvolvido um modelo biomecânico robusto e fidigeno, que permite o estudo das
características estáticas e dinâmicas do sistema neuro-músculo-esquelético humano. Desta
forma foi possível desenvolver um método prático não invasivo que permite a análise das
dinâmicas inerentes a ao sistema neuro-músculo-esquelético do membro superior humano, e
que poderá ser associado ao estudo de casos clínicos, onde os doentes manifestem a perda
sensorial e controlo da função motora, ao nível do braço.
Com o modelo desenvolvido é possível estudar as dinâmicas neuromotoras associadas,
durante o movimento do braço humano, tais como o tempo de activação de cada músculo
associado, quais os nervos motores recrutados e o seu papel no movimento motor do braço.
Com a variação dos valores estáticos associados ao modelo é possível analisar o
comportamento de todo o sistema e verificar quais as consequências no movimento final.
Durante o seu desenvolvimento, foram apresentadas várias técnicas de modelação
biomecânica, das quais se destacam o modelo muscular de Hill e de Zajac, que serviram de
base à modelação neuro-músculo-esquelética muscular incorporada no modelo biomecânico
desenvolvido. Foram apresentados os processos necessários à construção de cada um dos
modelos individuais relativos às dinâmicas neuronais, musculares e articulares, que reunidos,
formam a arquitectura neuro-músculo-esquelética, de acordo com a sua hierarquia. Desta
forma foi possível adquirir toda a informação do ponto de vista sistémico, para o
desenvolvimento de todo um modelo numérico, que representasse com robustez e fiabilidade
o sistema neuro-músculo-esquelético do membro superior humano.
A arquitectura do modelo foi definida através de uma abordagem multi-modelo,
constituída por vários subsistemas, obedecendo sempre à estrutura biológica e hierárquica do

CAPÍTULO 5 – CONCLUSÕES E TRABALHO FUTURO
Página
135
sistema neuro-músculo-esquelético. Estes apresentam uma relação complexa entre si,
necessária ao funcionamento correcto de toda a arquitectura neuro-músculo-esquelética. As
dinâmicas individuais são constituídas por conjuntos de equações diferenciais ordinárias,
tendo sido agrupadas em modelos de estado matriciais, dada a sua fácil análise dinâmica. O
modelo numérico desenvolvido foi possível de implementar através de um simulador
computacional, desenvolvido em software Matlab, que permitiu gerar as dinâmicas inerentes a
este sistema biológico. A comparação e validação efectuada junto dos dados de saída do
modelo numérico permitiu, quando comparados com dados reais obtidos por electromiografia,
testar a sua fiabilidade. Verificou-se a utilidade da electromiografia na análise do modelo,
pois permite obter os sinais de activação muscular já calculados, permitindo nesta forma uma
análise em profundidade dos resultados obtidos no modelo analítico. Posto isto, é possível
obter assim, um modelo que aproxime uma realidade subjacente, e tão complexa.
Foi sugerida uma abordagem ao estudo e implementação de projectos de reabilitação
em doentes com traumas ou mielopatias degenerativas, ao nível da espinal-medula. O
desenvolvimento de uma prótese exoesquelética aplicada ao membro superior do doente foi a
hipótese testada, e que através de uma estrutura de hardware apropriada, permitiria ao doente
o controlo voluntário dos seus movimentos. Desta forma implementou-se um algoritmo de
controlo inteligente, com base em redes neuronais artificiais, uma vez que está em directa
sintonia com o tema abordado neste trabalho, para além das suas vantagens evidentes. A
estratégia de controlo IMC foi implementada, dadas as suas vantagens e facilidades de
implementação. Demonstrou-se que o algoritmo de controlo desenvolvido permitiu um bom
seguimento de trajectórias angulares.
5.2 Perspectivas de Trabalho Futuro
No trabalho realizado foram identificados vários aspectos complementares que
permitem traçar linhas de investigação futuras.
O estudo de outras técnicas de modelação incluindo, métodos de optimização, pode ser
útil, de forma a identificar qual a melhor alternativa de baixa complexidade, a utilizar na
construção do modelo.

MODELAÇÃO E CONTROLO NÃO-LINEAR DO SISTEMA MOTOR HUMANO
Página
136
O estudo de técnicas de modelação articular tridimensional seria uma mais-valia ao
modelo desenvolvido. A incorporação de uma terceira dimensão espacial permitiria não só
aumentar os graus de liberdade do modelo, como também aumentaria exponencialmente a sua
aproximação à realidade.
O módulo de integração também pode sofrer algumas melhorias, testando outros
métodos de integração que promovam optimização de resultados. Seria também interessante
ter uma base de informação mais consistente, para testar várias combinações de dados, que
melhor retratassem os sinais de recrutamento neuromotor.
Alargar o banco de dados de treino neuronal, permitindo minimizar o erro ao nível do
controlador. Aumentando a base de treino da rede neuronal do controlador, seria possível
obter uma menor diferença nos dados de saída face aos de entrada, após o treino. Desta forma,
o tratamento da dinâmica inversa do modelo seria mais coerente, induzindo um menor erro de
desvio ao nível da estrutura IMC.
Por último, a implementação de uma interface gráfica orientada ao utilizador e, que
ilustrasse graficamente, a 3D, o comportamento do membro superior modelado. O
desenvolvimento de uma plataforma gráfica deste tipo que utilizasse este modelo numérico,
seria bastante funcional como ferramenta de investigação clínica, permitindo o estudo de
diversas patologias neuromotoras, entre outros casos clínicos. A longo prazo, caso as
condições reunidas forem satisfatórias, o desenvolvimento de uma prótese exoesquelética para
o membro superior humano seria cientificamente e socialmente, de grande impacto.

CAPÍTULO 5 – CONCLUSÕES E TRABALHO FUTURO
Página
137

Página
138
REFERENCIAS BIBLIOGRÁFICAS
Alexander, R. McN. and Bennet – Clark, H. C. (1977), Storage of elastic strain energy in
muscle and other tissues, In Nature, vol. 265, pp. 114.
Allison S. Arnold, Frank C. Anderson, Marcus G. Pandy, Scott L. Delp. (2005), Muscular
contributions to hip and knee extension during the single limb stance phase of normal gait: a
framework for investigating the causes of crouch gait, In J. Biomechanics, vol. 38, pp. 2181–
2189.
Beckett R, Chang K. (1968), An evaluation of the kinematics of gait by minimum energy, In
J. Biomechanics, pp. 147-155.
Bennet, M. B., Ker, R. F., Dimery, N. J., and Alexander, R. McN. (1986), Mechanical
properties of various mammalian tendons, In J. Zool., vol. 209, pp. 537, London.
Benno M. Nigg and Herzog Walter (2003), Biomechanics of the Musculo-skeletal System
Second Edition, In John Wiley & Sons, pp. 435.
Bessou P., Emonet-Denand F., and Laporte Y. (1965), Motor fibers innervating extrafusal and
intrafusal muscle fibers in cat, In J. Physiol, vol. 180, pp. 649-672.
Bobbert, M. F., Huijing, P. A., and Van Ingen Schenau, G. J. (1986), A model of the human
triceps surae muscle-tendon complex applied to jumping, In J. Biomech., vol. 19, pp. 887.
Bouani Faouzi, Chatti Abderrazak, Gallah Tarek (2004), Internal model control using neural
networks, In IEEE International Conference on Industrial Technology, pp. 1121-1124.
Bouisset S. and Goubel F. (1973), Integrated electromyographical activity and muscle work,
In Journal of Applied Physiology, vol. 35, pp. 695-702.
Bouisset S. and Maton B. (1973), Comparison between surface and intramuscular EMG
during voluntary movement, In Basel: Karger and J. E. Desment (ed.), New Developments in
Electromyography and Clinical Neurophisiology, pp. 533-539.
Cannon S. C. and Zahalak G. I. (1982), The mechanical behavior of active human skeletal
muscle in small oscillations, In J. Biomech., vol. 15, pp. 111-121.
Cecchi, G., Griffiths, P. J., Lopez, J .R., Taylor, S., and Wanek, L. A. (1986), Calcium
activation in skeletal muscle, In Bader H., Gietzen, K., Rosenthal, J., Rudel, R., and Wolf H.
U., (ed.)., Manchester University Press, Intracellular Calcium Regulation, vol. 213,
Manchester.
Chao E. Y. and Rim K. (1973), Application of optimization principles in. determining the
applied moments in human leg joints during gait.
Close J., Nickel M. and Todd A. (1960), Motor unit action-potencial counts. Their
significance in isometric and isotonic contractions, In The Journal of Bone and Joint Surgery,
vol 42, pp. 1207-1222.

Página
139
Colin G., Chamaillard Y., Bloch G., Corde G. (2007), Neural Control of Fast Nonlinear
Systems – Application to a Turbocharged SI Engine With VCT, In IEEE Transactions on
Neural Networks, vol. 18, n. 4, pp. 1101-1114.
Czeglédi P., Nagypal T. and Toth S. (1976), Computer analysis of EMG activity recorded by
aid of surface and needle electrodes, In P. Komi (ed.), International Series n Biomechanics,
vol A, pp. 253-258, Baltimore: University Park Press.
Demieville, H. N. and Partridge, L. D. (1980), Probability of peripheral interaction between
motor units and implications for motor control, In J. Physiol., vol. 238, n. 119.
Economou C., Morari M. and Palsson B. (1986), Internal model control. Extensions to
nonlinear systems, In. Eng. Process. Des. Dev., vol. 25, pp. 403-411.
Etxebarria V. (1994), Adaptive control of discrete systems using neural networks, In IEEE
Proc. Control Theory Appl., vol. 141, n. 4, pp. 209-215.
Fischbein, E. (1987), Intuition in Sciences and Mathematics, In D. Reidel Publishing
Company, Dordrecht, Netherlands.
Freivalds A. (2004), Biomechanics of the Upper Limbs: Mechanics, Modeling, and
Musculoskeletal Injuries, In CRC Press.
Gilchrist L. A. and Winter D. A. (1996), A two-part, viscoelastic foot model for use in gait
simulations, In J. Biomechanics, vol. 29 pp. 795–798.
Gottlieb G. L., Member IEEE, and Agarwal G. C., Member IEEE (1971), Control and
Regulation of the Human Motor System, In IEEE Transactions on Systems, Man. And
Cybernetics, vol. SMC-1, nº 4, pp. 379-383.
Gottlieb, G. L. and Agarwal, G. C. (1971), Dynamic relationship between isometric muscle
tension and the electromyogram in man, In J. Appl. Physiol., vol. 30, pp. 345.
Gottlieb, G. L. and Agarwal, G. C. (1970), Filtering of electromyographic signals, In J. Phys.
Med., vol. 49, pp. 142.
Guyton A. and Hall J. (2000), Textbook of Medical Physiology, In Tenth edition, Guanabara
Koogan.
Hagan T. Martin, Demuth B. Howard (1999), Neural Networks for Control, In Proceedings of
the American Control Conference, pp. 1642-1655, San Diego, California, USA.
Hamonet C., Verrout J. and Heuleu J. (1973), Electromyographie, In Encyclopédie Médical
Chirurgique, Apareil Locomotor, vol. 9, pp. 1-14.
Hatze, H. (1977), A myocybernetic control model of skeletal muscle, In Biol. Cybern., vol.
25, pag. 103.
He Jiping, Maltenfort G. M., Wang Qingjun, Hamm M. T. (2001), Modeling Neural Control,
In IEEE Control System Magazine, pp. 55-69.

Página
140
Henson M., and Seborg D. (1991), An internal model control strategy for nonlinear systems,
In AIChe J., vol. 37, n.7, pp. 1065-1081.
Hemami, H. and Wyman, B. (1980), Indirect control of the forces of constraint in dynamic
systems, In Journal of Dynamic Systems, Measurement and Control, vol. 101, pp. 355-360.
Hill, A. V. (1938), The heat of shortening and the dynamic constants of muscle, In Proc. R.
Soc. London Ser. B, 126 – 136, London.
Hill, A. V. (1949), The abrupt transition from rest to activity in muscle, In Proc. R. Soc.
London Ser. B, pp. 136 – 399, London.
Hof, A. L., Prink, C. N. A., and van Best, J. A. (1987), Comparison between EMG to force
processing and kinetic analysis for the calf muscle moment in walking and stepping, In J.
Biomech., vol. 20, pp. 167.
Humphrey R. D., Reed J. D. (1983), Separated cortical systems for control of joint stiffness:
Reciprocal activation and coactivation of antagonist muscles, In Motor Control Mechanisms
in Health and Disease, J. E. Desmedt (ed.), pp. 347-372, New York: Raven.
Hunt K. J., D. Sbarbaro, R. Zbikoeski, P. J. Gawthrop (1992), Neural networks for control
systems – a survey, In Automatica, vol. 28, n. 6, pp. 1083-1112.
Huxley, A. F. (1957), A hypothesis for the mechanism of contraction, In Prog. Biophys.
Chem., pp. 255.
Huxley, A. F. (1974), Review lecture: muscle contraction, In J. Biophys, vol. 1, pp. 243,
London.
Houk J. C. and Simon W. (1967), Responses of Golgi tendon organs to forces applied to
muscle tendon, In J. Neurophysiol., vol. 30, pp. 1466-1481.
Houk J. C. and Rymer W. Z. (1981), Neural control of muscle length and tension, In V. B.
Brooks, Handbook of Physiology, (ed.) Bethesda, MD: Amer, Physiol. Soc., Motor Control,
cap. 11, vol. 2, sec. 1.
Jipping He, Mitchel G. Maltenfort, Qingjun Wang, and Thomas M. Hamm (2001), Learning
from Biological Systems: Modeling Neural Control, In IEEE Control Systems Magazine, vol.
21, n.4, pp. 55-69.
Joachim Diederich (1992), Artificial Neural Networks: Concept Learning, In IEEE Computer
Society Press, Los Alamitos.
Jonsson B. (1967), Wire electrodes in electromyographic kinesiology, pp. 123-127, Zurich.
Jonsson B. and Komi P. (1973), Reproducibility problems when using wire electrodes in
electromyographic kinesiology, In J. E. Desmedt (ed.), New Developments in
Electromyography and Clinical Neurophysiology, pp. 540-546.

Página
141
Kapandji A. I. (2007), Fisiologia Articular volume 1: Ombro, Cotovelo, Prono-Supinação,
Punho, Mão, vol. 1, 6ª ed.
Kaplan L. Matthew, Heegaard H. Jean (2001), Predictive Algorithms for Neuromuscular
Control of Human Locomotion, In J. Biomechanics, vol. 34 pp. 1077-1083.
Katherine R. S. Holzbaur, Wendy M. Murray and Scott L. Delp (2005), A Model of the Upper
Extremity for Simulating Musculoskeletal Surgery and Analyzing Neuromuscular Control, In
Annual of Biomedical Engineering, vol. 33, no. 6, pp. 829-840.
Kemeni, J. G. (1959), A Philosopher Looks at Science, In D. van Nostrand Pub. Comp.,
Princeton, NJ.
Komi P. and Buskirk E. (1970), Reproducibility of electromyographic measurements with
inserted wire electrodes and surface electrodes, In Electromyography, vol. 10. pp. 357-367.
Lan L., Zhu K. Y., Zhang D. G. (2006), Modeling and Control of Human Motor System with
Generalized Predictive Control, In IEEE Transactions.
Lan N. (2002), Stability Analysis for Posture Control in a Two-Joint Limb System, In IEEE
Trans. Neural Syst. Rehab. Eng., vol. 10, no. 4, pp. 249-259.
Lan N., Li Y., Sun Y., Yang Fs. (2005), Reflex Regulation of Antagonist Muscles for Control
of Joint Equilibrium Position, In IEEE Trans. Neural Syst. Rehab. Eng., vol. 13, no. 1, pp. 60-
71.
Larminat P. D. (1993), Commande des Systèmes Linéaires, In France: Hermés, Paris.
Le Bozec S., Maton B. and Cnockaert J. (1980), The synergy of elbow extensor muscles
during dynamic work in man. I – Elbow extension, In European Journal of Applied
Physiology, vol. 44, pp. 255-269.
Ma, S. and Zahalak, G. I. (1988), Activation dynamics for a distribution-moment model of
skeletal muscle, In Math. Comput. Modeling, vol. 11, pp. 778.
Maurel W., Thalmann D., Hoffmeyer P., Beylot P., Gingins P., Kalra P. and Thalmann N.
Magnenat (1996), A Biomechanical Musculoskeletal Model of Human Upper Limb for
Dynamic Simulation.
Moreira M. Ângelo (1997), Introdução às Redes Neuronais.
Nahas E. P., Henso M. A. and Seborg D. E. (1992), Nonlinear Internal Model Control
Strategy for Neural Models, In Computers and Chemical Engineering, vol. 16, pp. 1039-
1057.
Narendra K. S., K. Parthasarathy (1990), Identification and control of dynamical systems
using neural networks, In IEEE Trans. Neural Networks, vol. 1, n. 1, pp. 4-27.
Onyshko S. and D. A. Winter (1980), A mathematical model for the dynamics of human
locomotion, In J. Biomechanics, vol. 13, pp. 361-368.

Página
142
Prochazka P. and Gorassini M. (1998), Ensemble firing of muscle spindle afferents recorded
during normal locomotion in cats, In J. Physiol., vol. 507, pp. 293-304.
Pandy, M. G., Berme, N. (1988), A numerical method for simulating the dynamics of human
walking, In J. Biomechanics., vol. 21, pp.1043—1051.
Partridge, L. D. and Benton, L. A. (1981), Muscle, the motor, In Handbook of Physiology.
The Nervous System, Section 1, American Physiology Society, Bethesda, MD, chap. 3, vol. 2
(Part 1),.
Perlmutter I. S., Maier A. M., Fetz E. B. (1998), Activity of spinal interneurons and their
effects on forearm muscles during voluntary wrist movements in the monkey, In J.
Neurophysiol., vol. 80, pp. 2475-2494.
Pierrynowski, M. R. and Morrison, J. B. (1985), A physiological model for the evaluation of
muscular force in human locomotion: theoretical aspects, In Math. Biosci, vol. 75, pp. 69.
Proske, U. and Morgan, D. L. (1987), Tendon stiffness: methods of measurement and
significance for the control of movement, In A review, J. Biomech., vol. 20, pp.75.
Rack, P. M. and Westbury, D. R. (1984), Elastic properties of the cat soleus tendon and their
functional importance, In J. Phisiol., vol. 347, pp 479, London.
Ramos H. D. (2002), Controlo Neuronal.
Richie, J. M. and Wilkie D. R. (1958), The dynamics of muscular contraction, In J. Physiol.,
vol. 143, pp. 104, London.
Rivals I. and Personnaz L. (2000), Nonlinear Internal Model Control Using Neural Networks:
Application to Processes with Delay and Design Issues, In IEEE Transactions of Neural
Networks, vol. 11, n. 1, pp. 80-90.
Robles, S. S. and Soechting, J. F. (1979), Dynamic Properties of the cat tenuissimus muscle,
In Biol. Cybern., vol. 33, pp. 187.
Sánches-Sinencio E. and Lau C. (1992), Artificial Neural Networks, In IEEE Press, New
York.
Silva M. (2004), Apontamentos de Biomecânica do Movimento, In Curso de Biomecânica do
Movimento, Instituto Superior Técnico, Lisboa.
Stephens J. and Taylor A. (1973), The relationship between integrated electrical activity and
muscle force in normal and fatiguing human voluntary muscle contractions, In J. E. Desmedt
(ed.), New Developments in Electromyography and Clinical Neurophysiology, vol. 54, pp.
623-627, Basel: Karger.

Página
143
Thepaut-Mathieu C. and Maton B. (1985), The flexor function of the m. pronator teres in
man: a quantitive electromyographic study, In European Journal of Applied Physiology, vol.
54, pp. 116–121.
Townsend M. A. and Seireg A. (1972), The synthesis of bipedal locomotion, In J.
Biomechanics, vol. 5, pp. 71–83.
Wang. L and Buchanan S. Thomas (2002), Prediction of Joint Movements using a Neural
Network Model of Muscle Activations from EMG Signals, In IEEE Transactions in Neural
Systems Rehabilitation Engineering, vol. 10, n. 1.
Weiss, P. L., Kearney R. E. and Hunter I. W. (1986), Position dependence of ankle joint
mechanics, In J. Biomech., Section II - Active mechanics, vol. 19, pp. 737.
Wilkie D. R. (1956), The mechanical properties of muscle, In Br. Med. Bull., vol. 12, pp.
177.
Winter David A. (2005), Biomechanics and motor Control of Human Movement, 3rd
edition,
In John Wiley & Sons.
Winters J. M. and Stark, L. (1987), Muscle Models: what is gained and wath is lost by
varying model complexity, In Biol. Cybern., vol. 55, pp. 403.
Wood J. E. and Meek S. G., and Jacobson S. C. (1989), Quantitation of human shoulder
anatomy for prosthetic arm control I, - Surface modeling, In J. Biomech., vol. 23, no. 3, pp.
273 – 292.
Young-Zai Lu (1996), Industrial Intelligent Control, In John Wiley & Sons.
Zajac F.E. (1989), Muscle and Tendon: Properties, Models, Scaling, and Application to
Biomechanics and Motor Control, In CRC Crit Rev. Biomed. Eng., vol. 17, 359-411.

Página
144
ANEXO – Especificações Técnicas da Unidade de Aquisição MP35
Painel Frontal:
Especificações Descrição
VERIFICADOR DE ELÉCTRODO
Resistência (Vin+ e Vin- ao GND)
0-100 K
ENTRADAS ANALÓGICAS
Número de canais
4 isolados (no painel frontal, CH 1 –
CH 4)
2 não isolados (auxiliares)
TAXA DE AMOSTRAGEM
Máxima
Mínima
Entrada de Trigger
Threshold
100K amostras/segundo
1 amostra/segundo
Canal analógico ou digital
Threshold ajustável; Trigger positivo ou
negativo
Resolução A/D (antes da filtragem digital) 24 bits
Razão Sinal Ruído > 90 dB (nominal)
Resolução da tensão dependente do ganho
1.192 microvolts/bit (ganho 10) a
0.024 nanovolts/bit (ganho 50 000)
Tensão de entrada (dependente do ganho) 400 microvolts a 2 Volts p-p
Incerteza de entrada (dependente do ganho) 0.01% da FSR (―Full Scale Range‖)
Protecção de entrada; corrente limitada 1mA/V
Tensão máxima de entrada (entre Vin+ e Vin-) 2V p-p
Impedância de entrada diferencial
(entre Vin+ e Vin-) 2M
Filtros (automáticos ou ajustáveis) 3 filtros digitais IIR ―two-pole‖ por canal

Página
145
Impedância de entrada no modo comum (entre
Vin+/Vin- e GND)
DC
AC(50/60 Hz)
11M
1 000M
Ganho (automático ou ajustável) 10 – 50 000
Ajuste da linha de base
(automático ou ajustável)
Ganhos 10, 20 e 50: 100mV
Ganhos 100 a 50 000: 10mV
Tolerância de potencial offset do eléctrodo
Ganhos 10, 20 e 50: 2V
Ganhos 100, 200, 500: 200mV
Ganhos 1 000 a 50 000: 80mV
Painel Anterior:
Especificações Descrição
SAÍDAS ANALÓGICAS
Número de canais
Resolução D/A
Incerteza
Impedância de saída
Tensão de saída
Corrente de saída
1
12 bits
0.0125% de FSR
50
0 – 4.096 V
10 mA máximo
INTERFACE DE SÉRIE
Tipo de transmissão
Taxa de transmissão
USB
Velocidade máxima do tipo 2.0
HEADPHONE Headphones de estéreo com baixa impedância
PORTA I/O
8 entradas TTL compatíveis e
8 saídas TTL compatíveis.

Página
146
TRIGGER
Entrada TTL compatível e
porta de sincronização.
Fusível Fusível de fast-flow de 1 amp.
PIN-OUTS da unidade MP35
Verificador de eléctrodo (“Electrode Check”) – Painel Frontal
DSUB fêmea de 9 pinos Pinos
2 – Vin+
3 – GND
4 – Vin-
Entrada de MP – Painel Frontal
CH 1, CH 2, CH 3, CH 4
DSUB fêmea de 9 pinos Pinos
1 – Shield drive
2 – Vin+
3 – GND
4 – Vin-
5 – Shield drive
6 – +5V (100mA de agregado máximo)
7 – lead 1 resistor ID; I2C SCL
8 – lead 2 resistor ID; I2C SDA
9 – -5V (100mA de agregado máximo)

Página
147
Saída analógica de MP – Painel Anterior
DSUB macho de 9 pinos Pinos
1 – saída de buffer AC
Z out = 2 200µF Cap
V out : +/- 2V
2 – saída de buffer DC
Z out = 50
V out: 0 a 4,096V
3 – GND
4 – +5V (100mA max)
5 – saída de buffer digital
Z out = 1 K
V out: 0 a 5V
6 – +12 V (100mA max)
7 – I2C SCL
8 – I2C SDA
9 – não utilizado
Ligação Série de MP – Painel Anterior
Pinos
1 – +5 V
2 – -Data
3 – Data+
4 – GND

Página
148
Porta I/O – Painel Anterior
DSUB macho de 25 pinos Pinos
BSL 3.7.0-3.7.1
Não suporta os pinos 7, 9, 18, 19, 20 e 21.
1 – Saída digital 1
2 – Saída digital 2
3 – Saída digital 3
4 – Saída digital 4
5 – GND não isolado
6 – GND não isolado
7 – RS-232-RX
8 – +5 V
9 – I2C-SDA
10 – Entrada digital 1
11 – Entrada digital 2
12 – Entrada digital 3
13 – Entrada digital 4
14 – Saída digital 5
15 – Saída digital 6
16 – Saída digital 7
17 – Saída digital 8
18 – Entrada analógica – direita
19 – Entrada analógica – esquerda
20 – RS-232-TX
21 – I2C-SDA
22 – Entrada digital 5
23 – Entrada digital 6
24 – Entrada digital 7
25 – Entrada digital 8

Página
149
Calibração de Entrada - Saída de MP35
O sinal de entrada da unidade MP35 (que varia com o ganho) vai resultar num sinal de
saída com um valor de offset 2.05V. Por exemplo, para um ganho de 100, um sinal de 1mV
pico-a-pico apresentará um sinal de saída de 20.28 mV pico-a-pico com um offset de 2.05V.
Ganho
Valor de entrada (mV)
Min Max Factor de escala de saída
X10 -1V +1V 2.05
X20 -500 +500 4.097
X50 -200 +200 10.24
X100 -100 +100 20.48
X200 -50 +50 40.97
X500 -20 +20 102.42
X1000 -10 +10 204.85
X2000 -5 +5 409.7
X5000 -2 +2 1024.25
X10000 -1 +1 2048.5
X20000 -0.5 +0.5 4097
X50000 -0.2 +0.2 10242.5

Página
150