Embed Size (px)
DESCRIPTION
Modelagem I
Citation preview

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 1 -
OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
ALGUNS MODELOS DE OPERAÇÕES UNITÁRIAS
em
PROCESSAMENTO DE MINÉRIOS
SUMÁRIO
1. MODELOS DE FRAGMENTADORES GRAÚDOS
BRITADORES E GRANULADORES DE MAXILAS E CONES
1.1 Modelo da Curva Padrão
1.2 Modelos Matriciais.
1.3 Modelo Matricial de Circulação Selectiva – Modelo de Lynch
1.4 Condensação de parâmetros e Parâmetros Condensados
2. MODELOS de FRAGMENTADORES FINOS
MOINHOS DE TAMBOR
2.1 Fragmentadores de Tambor
2.2 Modelos de Transição Finita
2.3 Integração das Equações da Moagem Batch
3. SISTEMAS DE FLUXO CONTÍNUO
Modelos para Moagem em Regime Permanente Estacionário
4. TRANSPORTE DIFERENCIAL NO CALIBRE
Um modelo Fenomenológico para Moinho de Barras
5. PARTICULARIDADES DA MOAGEM BOLAS E BARRAS
AS NÃO-LINEARIDADES INTRÍNSECAS
6. MÉTODOS PARA CÁLCULO DO REGIME PERMANENTE EM CIR-
CUITO FECHADO
6.1 Equação do Circuito Fechado utilizando um Modelo de Curva Padrão
6.2 Equação Global do Circuito Fechado em Regime Permanente Estacionário
6.2 Método iterativo para cálculo de um Circuito Fechado
7. MODELO DE MOAGEM AUTOGÉNEA
7.1 Equação de Balanço Básica
7.2 Discretização do Calibre.
Equação da Moagem Autogénea Batch para Fenómenos de Fractura e Abrasão
Combinadas
7.3 As Não-Linearidades Intrínsecas da Moagem Autogénea.

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 2 -
ALGUNS MODELOS DE OPERAÇÕES UNITÁRIAS
em
PROCESSAMENTO DE MINÉRIOS
1. MODELOS DE FRAGMENTADORES GRAÚDOS
BRITADORES E GRANULADORES DE MAXILAS E CONES
Entende-se por fragmentador graúdo toda a máquina de cominuição par-
tícula-a-partícula, operada normalmente entre duas maxilas, cones ou rolos. Para se
conseguir este objectivo as partículas são encaminhadas pela geometria construtiva da
máquina (dimensões e tipo de movimento das peças fragmentadoras) de modo a
seguirem trajectórias mais ou menos rígidas. Este condicionamento, embora
aparentemente simples, acaba por ser demasiado exigente, implicando dois aspectos
de primordial importância na cinética da fragmentação neles operada:
tempo de residência fixo, ou “semi-fixo” na medida em que apenas é
manipulável dentro da curta gama de variação permitida pela afinação da
regulação;
tempo de residência independente do caudal de alimentação -- este
aspecto, claramente relacionado com o anterior, é referido em destaque para
salientar o diferente comportamento destes fragmentadores relativamente
aos moinhos de tambor.
1.1 Modelo da “Curva Padrão”
O conceito de “Curva Padrão” é a expressão prática das chamadas Leis de
Gaudin da Fragmentação. Com efeito, nos seus trabalhos pioneiros Gaudin tinha já
identificado que as granulometrias dos produtos descarregados por máquinas de
tempo de residência fixo ou semi-fixo podiam ser descritas por curvas de forma muito
bem definida e sobreponíveis para diferentes regulações, desde que estas se encon-
trassem dentro das gamas de utilização recomendadas. Embora Gaudin não tivesse
definido esse comportamento em termos cinéticos, enunciou os seus efeitos ao
postular para esse tipo de fragmentador a constância da forma da curva granulo-
métrica dentro da gama de regulação de cada máquina, ou seja, a invariância das
condições cinéticas de moagem como consequência da pequena variabilidade do
tempo de residência.
Directamente das Leis de Gaudin deriva, então, o primeiro modelo elementar
de descrição dos trituradores de maxilas e cones – a CURVA PADRÃO utilizada
como simples descritor empírico do processo. Como se trata duma representação di-
recta da resposta granulométrica do sistema, é uma solução integrada (ie, não depende
explicitamente do tempo de residência, usando-se o artifício do escalamento no
calibre para simular diferentes regulações) que não permite aceder à função de
transição do processo cinético que lhe está subjacente.
O grande inconveniente deste modelo é a incapacidade intrínseca de resposta a
variações da composição granulométrica original. Por isso, apenas é legitimamente
utilizada com alimentação rigorosamente classificada à cabeça.

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 3 -
Trata-se, obviamente, de uma abordagem de natureza empírica, cuja eficácia
de aplicação depende fundamentalmente da qualidade dos dados obtidos pela via
experimental.
Na perspectiva descrita, este modelo de “curva padrão” é exclusivamente um
descritor estático da operação de fragmentação. A sua pequena flexibilidade
aconselha a restringir a sua utilização à descrição de fragmentadores de tempo de
residência fixo (ou semi-fixo), isto é, apenas para simular o funcionamento dos ditos
Fragmentadores Graúdos.
Os dados experimentais podem ser utilizados basicamente de duas formas
diferentes: pela via da interpolação linear (algorítmica ou gráfica) ou ajustando
qualquer uma das chamadas leis granuloméricas – Suchuman-Gaudin, Rosin-
Rammler ou Harris, entre outras – para o que se deverá recorrer a um algoritmo de
optimização para determinação dos parâmetros (forma e escala) que minimizam a
soma do quadrado dos desvios entre as respostas do modelo e os dados reais.
As leis acima referidas, expressas na forma de Cumulante da distribuição de
calibres, têm as seguintes expressões para :
Suchuman-Gaudin
m
ta
xw
Rosin-Rammler
m
ta
xw exp1
Harris
21
11
mm
ta
xw
sendo os expoentes, m, m1 e m2, os parâmetros forma, a o parâmetro escala de cada
uma das distribuições e x a variável calibre (mm).
Quando se utiliza este modelo de Curva Padrão (aproximação válida apenas
quando se cumprem os pressupostos acima assinalados), a Regulação de afinação do
fragmentador é utilizada para se efectuar o posicionamento da própria Curva Padrão
na escala de calibres, isto é, a graduação dessa curva, já que o princípio básico é o da
constância de forma da curva granulométrica dos produtos descarregados pelo
fragmentador, em todo o seu domínio de aplicação. Para tal, o desempenho de cada
fragmentador é normalmente caracterizado pela indicação do valor (experimental) da
percentagem de material fragmentado que se encontra acima do calibre corres-
pondente ao valor dessa Regulação. Este valor é designado por Percentagem de
Refugo à Regulação e pode ser determinado experimentalmente ou encontrado nos
catálogos ou manuais operativos dos equipamentos.
Assim, considere-se que sobre um fragmentador graúdo, do tipo maxilas ou
granulador de cones (Symons), se efectuaram ensaios sob várias Regulações
diferentes e se determinaram experimentalmente as respectivas Cumulantes Inferiores
dos Histogramas granulométrico dos produtos fragmentados.
A cada uma dessas Cumulantes é possível ajustar qualquer uma das leis acima
referidas, com determinação dos parâmetros forma e escala – m e a.

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 4 -
Se os dados forem coerentes e o ajuste for minimamente bem sucedido, a
primeira constatação será a de que os parâmetros forma – m – calculados para cada
uma das Regulações ensaiadas devem ser iguais (ou próximos). Esta constatação, a
existir, confirmará o enunciado das Leis de Gaudin – invariância da forma da
Cumulante das distribuições granulométricas dos produtos fragmentados para
diferentes Regulações.
Seguidamente, para cada Regulação determina-se o valor da Cumulante para o
calibre igual ao da Regulação (alternativamente pode determinar-se experimental-
mente efectuando uma crivagem expedita do produto fragmentado sobre um crivo de
malha igual ao valor da Regulação em mm). Em princípio este valor deverá ser da
mesma ordem de grandeza para cada uma das Regulações ensaiadas – facto que
traduzirá a constância do valor do Refugo à Regulação acima referido.
Com estes elementos estaremos em condições de determinar a forma geral da
Curva Padrão que representa o funcionamento do fragmentador ensaiado.
Consideremos como exemplo o caso de uma lei Schuman-Gaudin:
admitindo m conhecido, resultante do ajustamento, então
m
a
RegulaçãoRefugo1
expressão que permite calcular directamente o valor de a com o qual ficará
devidamente definida a Curva Padrão procurada.
a = função (Regulação, Refugo)
O leitor encarregar-se-á de produzir os raciocínios semelhantes para aplicação
às outras leis acima referidas.
COMENTÁRIO FINAL
De facto, as Funções Granulométricas Clássicas, enquanto expressões
matemáticas formais das chamadas Leis da Fragmentação de Gaudin, só se
transformam em “modelos” da cominuição produzida por um fragmentador graúdo a
partir do momento em que é possível introduzir na sua formulação o parâmetro
operacional “Regulação”.

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 5 -
1.2 Modelos Matriciais.
Mantendo o mesmo ponto de vista de máquinas de tempo de residência fixo,
surgiram durante a década de 70 os modelos matricias, abundantemente utilizados em
ambiente industrial (Lynch em Mount Isa Mines - Austrália) que fazem apelo a uma
função de transição finita. Uma vez que essa transição finita descreve a transfor-
mação de calibre operada durante um determinado intervalo de tempo finito, igual ao
tempo de residência médio e constante para todas as partículas (1), é uma descrição
integrada do processo só legitimamente utilizável para fragmentações com um mesmo
tempo de residência, portanto, com aplicação particular à descrição do funcionamento
de máquina de fragmentação graúda. Contudo apresenta uma vantagem relativamente
ao modelo anterior pois admite a influência directa da composição granulométrica da
alimentação, como veremos já de seguida ao escrever a equação geral da
cominuição em contínuo para o caso da transição finita.
Seja então o seguinte fragmentador em circuito aberto, em que:
- fi , ( f ) o vector composição da alimentação
- pi , ( p ) o vector composição do produto final
- M o caudal mássico através do fragmentador
Note-se, antes de mais, que o carácter finito da transição que se vai descrever
está implícito apenas na destruição, única função dependente do tempo de residência.
Em regime permanente estacionário (constante), as equações de balanço de
massa a cada calibre permitem escrever (2):
0
saida fluxo
no i calibre
massa
ãofragmentaç
por destruida
i calibre massa
ãofragmentaç
por gerada
i calibre massa
entrada fluxo
no i calibre
massa
Admitindo:
- Si a função destruição dos calibres por fragmentação
- Bi,j formação de partículas de novos calibres por fragmentação das mais
graúdas que se destruíram, poderemos escrever:
f M S f M B S f M p Mi j j i j i i i
j
i
, 01
1
1
1
,1i
j
jijjiii BfSfSp
1 Está aqui já implícita a aceitação dum regime de fluxo em transporte perfeito, visto se
admitir o mesmo tempo de residência para todas as partículas.
2 Na discretização da escala granulométrica que passaremos a usar, o índice i=1 representará a
classe de calibre superior, descendo o índice até à classe mais fina definida pelo calibre i=n.
M M
fi pi

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 6 -
em que:
Si é um parâmetro que exprime a fracção de massa de partículas da classe de
calibre i que foi destruída durante o evento singular de fragmentação. Este
fenómeno é vulgarmente referido pela designação de Função Destruição;
Bij é um outro conjunto de parâmetros que referem a distribuição (percentual) da
massa de partículas da classe j que sofreram destruição, pelas várias classes i de
calibre inferior. Esta função é normalmente designada por Função Formação.
A anterior equação toma a seguinte forma em notação matricial:
fSBSIFSBFSIp
Como por definição, chama-se MATRIZ TRANSIÇÃO, T à matriz (trian-
gular inferior de diagonal não nula) que aplicada ao vector composição inicial origina
o vector composição final, isto é:
SBSIT e
fTp
Esta é a forma final dum modelo matricial de transporte perfeito. Note-se que, ao
contrário do modelo de Curva Padrão, agora a resposta do sistema é formalmente
expressa em função da composição inicial. A matriz T é o operador dessa transfor-
mação e representa o EVENTO, finito, “fragmentação operada numa passagem do
material através da máquina” (sucessivos apertos entre as maxilas ou cones).
Atente-se, contudo, que a Regulação continua a não estar explicitamente expressa no
modelo, de modo que duas regulações diferentes terão que ser expressas por duas
matrizes T diferentes.
1.3 Modelo Matricial de Circulação Selectiva – Modelo de Lynch
Contudo, este tipo de modelos, embora já respondessem às variações da
granulometria da alimentação, não respondiam ainda às conhecidas variações da
resposta do sistemas em face da regulação, a grande variável operacional deste tipo
de máquinas, expressa como afastamento entre as peças fragmentadoras na zona da
descarga.
Lynch propõe uma abordagem deste problema baseada na observação de que
no interior da câmara de um fragmentador graúdo ocorre um efeito de classificação de
cada vez que a máquina abre. Desta forma, segundo este autor, o processo pode ser
descrito como uma sequência de eventos singulares de fragmentação (que ocorrem
quando se opera um fecho das maxilas, ou dos cones numa máquina tipo Symons),
considerados semelhantes, cujo número (supostamente pequeno) será tanto maior
quanto mais apertada for a Regulação do fragmentador. Ora, no modelo proposto, o
número desses eventos singulares de fragmentação que actuam sobre as partículas é
precisamente comandado pela curva de partição da classificação acima referida.
Deste modo, o funcionamento cinético do triturador é descrito por um
transição finita que diz respeito ao EVENTO, finito, “cominuição operada durante
um aperto entre as maxilas ou cones” e por uma classificação que decide quais as
partículas que vão estar sujeitas a essa transição.

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 7 -
Esquematicamente, teremos:
M – caudal mássico de Alimentação
R – caudal mássico seleccionado para o EVENTO de fragmentação
fi ,( f ) o vector histograma de calibre i da Alimentação e
xi ,( x ) o vector histograma de calibre i na alimentação do Classificador
pi ,( p ) o vector histograma de calibre i no Produto Final
Ci,i ,(C ) Função Classificação (matriz diagonal)
Ti,j ,(T ) Função Transição (matriz triangular inferior, diagonal não nula)
No esquema seguinte representa-se o modelo idealizado por LYNCH,
devidamente parametrado consoante a legenda anterior e com os operadores C e T a
realizarem as suas transformações:
f . M
x . (M+R)
R
p . M
C . x .(M+R)
T . C . x .(M+R)
Uma vez que o modelo só tem coerência no pressuposto de que o circuito
fechado que o suporta está em regime permanente, então o Princípio da Conservação
permite escrever as equações de balanço nos nós, respectivamente, de Mistura e
Classificador:
- nó mistura ).( )( RMxRMxCTMf
MfxCTI R)(M
e, portanto, MfCTIRMx 1
)(
equação que permite determinar directamente dos dados e dos parâmetros do modelo
o valor do vector de fluxos, X, intermédio;
- nó classificador MpxCx R)(M R)(M ,
ou seja, R)(M xCIMp
pelo que, substituindo x .(M+R) pelo valor obtido na equação anterior e eliminando
M, se obtêm a equação final desejada:
fCTICIp 1

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 8 -
Como, entretanto, na equação final obtida só figuram agora os vectores fluxos
mássicos f e p (porque o vector x foi eliminado durante o cálculo), que em regime
permanente se referem a um mesmo caudal total, então estes vectores de fluxo
mássico representam igualmente os respectivos histogramas de calibre (uma vez que a
normalização é feita pelo cociente com o mesmo valor de caudal). Dito de outra
forma, se na expressão anterior f representar o histograma de calibre do produto que
alimenta o fragmentador, então p , dado pela expressão deduzida, será uma previsão
(resultado do modelo) do histograma de calibre do produto fragmentado.
Com o artifício da classificação interna, o modelo proposto permite usar uma
mesma transição finita (correspondente a um dado tempo de residência, associável
neste caso a um único aperto das maxilas ou cones) para diferentes regulações, pois o
efeito de maior tempo de residência para regulações mais apertadas vai surgir, não à
custa de uma nova integração mais longa, mas sim de sucessivas aplicações da mesma
matriz transição finita sobre mais material recirculado. Para que este efeito de
circulação selectiva seja minimamente realista é necessário fazer depender a matriz
classificação do valor da regulação. Lynch propõe para esta matriz classificação uma
forma paraboloide:
C s( ) 0 para s<CSS
2/1 OSSCSSOSSsC s para CSS<s<OSS
C s( ) 1 para s>OSS
em que s é o calibre e OSS e CSS, respectivamente, as regulações lado aberto e lado
fechado ("open side setting" e "close side setting").
Para obter, finalmente, os valores da matriz classificação discretizados na
malha de calibre, aconselha-se o uso do valor médio de C(s) dentro de cada intervalo
de calibre, dado por:
1
1)(
ii
si
sii
ss
dssCc

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 9 -
1.4 Condensação de parâmetros e Parâmetros Condensados
Uma análise atenta do modelo de fragmentação descrito pela equação
1
1
,1i
j
jijjiii BfSfSp
anteriormente deduzida no parágrafo anterior (pág. 4), em termos exclusivamente
empíricos, revela que nela foram utilizados duas classes de parâmetros descritores do
processo de transição por cominuição de um estado anterior, representado por fi, para
o estado seguinte pi.
Ora, se pretendermos representar o sistema particulado em questão com uma
descretização de 10 classes de calibre, a descrição do processo de fragmentação pela
equação acima apresentada necessita da determinação experimental de, pelo menos:
9 valores de Si, dado que a classe de calibre mais fino não sofre fragmentação,
visto que, por definição, só se considera haver fragmentação quando as
partículas mudam de lote granulométrico;
35 valores de Bij (45 da matriz triangular inferior subtraídos da última linha que
poderá ser obtida por diferença invocando o princípio da conservação da
massa).
Ora, esta situação é duplamente indesejável para a formulação e operaciona-
lidade do modelo. Primeiro porque o número de parâmetros necessários para a
descrição do processo é variável com o grau de discretização da escala dos
calibres, o que manifestamente não tem sentido. Por outro lado, um tão elevado
número de variáveis no modelo representam um igual número de graus de
liberdade que originará, necessariamente, um mau condicionamento do
problema quando se pretender determinar os seus valores a partir de dados
experimentais. Com efeito, dado esse elevado número de graus de liberdade,
será de esperar a possibilidade de aparecimento de diferentes conjuntos desses
parâmetros que permitam reproduzir os resultados experimentais com um grau
de aproximação semelhante.
Assim, em favor da operacionalidade do modelo e da necessidade de
introdução de meios que permitam fazer uma leitura fenomenológica dos parâmetros
que controlam o comportamento do modelo – nomeadamente ao nível da definição
das funções Destruição e Formação atrás definidas – há todo o interesse em condensar
os parâmetros Si e Bij num outro conjunto de parâmetros a que chamaremos
parâmetros condensados, estabelecendo condições de dependência entre aqueles,
minimamente suportadas pela física do processo de fragmentação.
O caminho normalmente seguido neste processo de condensação consiste na
introdução de multiplicadores (escalas) e expoentes nas fórmulas de dependência.
Embora este assunto seja ainda hoje alvo de investigação por parte das mais
importantes escolas internacionais de Preparação de Minérios, para efeito de
desenvolvimento de modelos operacionais, quer ao nível das aulas práticas, quer
mesmo em grande número de casos reais, poderão ser adoptadas as seguintes regras
de condensação para simulação do processo de fragmentação:

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 10 -
Função Destruição – admite-se um decrescimento monótono do fenómeno da
destruição à medida que os calibres vão diminuindo, contexto que é fisicamente
coerente com a teoria da fractura segundo Griffith (ver disciplina de
Fragmentação – 3º ano):
Pa – parâmetro que, referindo a destruição efectiva da classe de calibre
mais graúda, é um aferidor da energia útil de fragmentação (escala)
e depende directamente das condições energéticas disponíveis para a
própria fragmentação – amplitude e frequência do movimento das
peças fragmentadoras e sua massa, nos Fragmentadores Graúdos e
diâmetro do moinho e velocidade de rotação, carga de agente
fragmentador, etc., nos Moinhos de Tambor, como veremos adiante;
Pk – parâmetro < 1 que comanda o decrescimento da função destruição
com o calibre e que está realicionado com as características dos
agentes fragmentadores (geometria das forras, massa e número de
barras ou bolas, etc) e eventualmente com a textura do minério.
Função Formação – uma vez que esta função representa ela própria a
distribuição do material fragmentado de uma classe de calibre pelas classes de
calibre inferiores, há legitimidade para propor para esta função a forma de uma
Lei Granulométrica clássica, como, por exemplo, a Lei de Harris. Neste caso os
parâmetros a incluir no modelo serão um ou dois parâmetros forma e um
parâmetro escala que representará, por exemplo, o calibre máximo gerado. Para
simplificação, o calibre máximo gerado poderá ser considerado o calibre limite
inferior da classe que foi destruída. Se, por ventura, não forem visíveis
variações claras do tipo textural ao longo da escala de calibres, então será
também admissível que as diferentes distribuições das partículas, gerados pela
cominuição que ocorreu em cada uma das classes de calibre, tenham a mesma
forma e difiram apenas nos respectivos parâmetros escala.
A experiência tem demonstrado que os parâmetros da Formação estão tenden-
cialmente correlacionados com as características texturais do minério.
Com a adopção destas duas proposta de condensação paramétrica, os anteriores 35+9
= 46 parâmetros necessários para operacionalizar o modelo desenvolvido, resumir-se-
ão a:
2 parâmetros – Pa e Pk – para determinar os 9 Si;
2 ou 3 parâmetros – 1 ou 2 parâmetros forma e 1 parâmetro escala – para
determinar os 35 Bij.
1
11 e
i
ii PkPaPkSSPaS

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 11 -
2. MODELOS DE FRAGMENTADORES FINOS
MOINHOS DE TAMBOR
2.1 Fragmentadores de Tambor
Contrariamente aos fragmentadores graúdos, os moinhos de tambor são
máquinas de Tempo de Residência variável (Tr) e dependente do caudal de
alimentação. Essa dependência é expressa pela relação:
2.2 Modelos de Transição Instantânea
Na perspectiva da variação do Tempo de Residência, esta torna-se, na
moagem, a variável fundamental do processo, pois dela vai depender a extensão da
interacção dos agentes fragmentadores com as partículas do minério, em suma, a
extensão do próprio fenómeno da fragmentação.
Há, assim, necessidade de introduzir a variável tempo na anterior equação de
balanço, escrita para descrever a fragmentação em regime estacionário. Na concepção
empírica do processo foi introduzido o conceito de Função Destruição como sendo a
fracção de material destruído (isto é, que deixou de pertencer a uma dada classe de
calibre porque as acções de fragmentação sobre ele foram exercidas obrigaram as
partículas a diminuir o seu calibre):
Si Função Destruição, tal que Si . fi . M é a massa de material destruído.
Ora, como em termos cinéticos, a fragmentação num moinho de tambor é um
processo contínuo no tempo, resulta evidente que essa massa de material destruído
tem que depender directamente do Tempo de Residência, logo:
Si = Ki . t em que Ki tem as dimensões [T-1
]
e é definida como velocidade de destruição.
Com esta transformação a equação de balanço, que representa um processo de
fragmentação, passará a escrever-se:
1i
1j
j,ijjiiii BfSfSfp
1
1
,)()()()(i
j
jijjiiii BtftKtftKtfttf
1
1
,)()()()( i
j
jijjii
ii BtfKtfKt
tfttf
Fazendo t 0
h
hm
mVTr
3
3
médio Caudal
útil olume

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 12 -
1
1
,)()()( i
j
jijjii
i BtfKtfKdt
tdf
equação diferencial que representa um processo de fragmentação em termos cinéticos.
Tal como anteriormente, esta equação pode ser escrita em forma matricial:
)()(
tfLdt
tfd
em que L é a MATRIZ ALTERAÇÃO INSTANTÂNEA DA COMPOSIÇÃO
GRANULOMÉTRICA (o leitor deduzirá que esta matriz tem expressão
ligeiramente distinta da Matriz Transição anteriormente deduzida).
O modelo de fragmentação descrito desta forma diz-se Modelo de Transição
Instantânea, em contraposição ao Modelo de Transição Finita que descreve
exclusivamente um evento singular de fragmentação.
2.3 Integração das Equações da Moagem Batch
A equação local da cominuição, acima deduzida:
)()(
tfLdt
tfd
na qual o produto matricial )(tfL exprime a alteração instantânea da composição, é
uma equação (matricial) cinética de primeira ordem. A implementação do MODELO
DE COMINUIÇÃO implica a resolução dessa equação diferencial matricial (ou seja,
um sistema de equações diferenciais), que, para o caso em que L pode ser considerado
independente de t e de )(tf , se obtém directamente por separação de variáveis:
)0()exp()( ftLtf
expressão da EQUAÇÃO GERAL DA COMINUIÇÃO, em que )0(f representa a
composição granulométrica da alimentação.
Contudo, esta solução analítica, é apenas viável face à independência de L de
t e de )(tf , isto é, à sua invariabilidade no decorrer do processo de fragmentação. A
sua determinação, porém, envolve o cálculo da exponencial da matriz L , para cuja
solução é necessário recorrer ao conceito de FUNÇÃO DE MATRIZ que se passa a
expor.
Define-se valor próprio duma matriz do seguinte modo:
seja L uma matriz de elementos Lik
e P um vector cujas componentes
formam a matriz coluna Pk;

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 13 -
se pela aplicação da matriz L ao vector P se obtiver unicamente uma sua
dilatação ou contracção de valor , diz-se que P é um vector próprio de
L e que é um seu valor próprio;
isto é:
PPL
ou ainda:
i
kiik PPL , para cada k = 1, 2, ... , n
=
2222121
1212111
PPLPL
PPLPL
ou seja,
=
0
0
222121
212111
PLPL
PLPL
Este sistema determina as componentes do vector P , desde que assuma um
dos seus valores.
Este sistema, sendo de n equações lineares homogéneas só é possível desde
que o seu determinante seja nulo. Pode, pois, escrever-se:
02221
1211
LL
LL
que é a expressão algébrica da EQUAÇÃO CARACTERÍSTICA da matriz L que,
mediante resolução duma equação algébrica de grau n, determina os seus possíveis
valores próprios, .
Porém, como vimos, a matriz é triangular inferior e, portanto, os elementos da
diagonal principal são os seus valores próprios que, no caso presente, representam os
elementos Kj da matriz destruição.
Entretanto construamos uma matriz P em que os elementos de cada coluna, j,
são as componentes Pij do vector próprio P
j correspondente ao valor próprio K
j da
matriz L . Seja também Q a matriz inversa de P . Então, estas duas matrizes P e Q
diagonalizam a matriz L na matriz dos seus valores próprios Kj , ou seja:
PLQK

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 14 -
sendo K a matriz diagonal cujos elementos Ki,i
são os valores próprios Kj. Mas como
IQ P , multiplicando à direita a anterior expressão por Q , obteremos:
LQQPLQQK
e agora multiplicando à esquerda por P
LLQPQKP
obtêm-se a desejada decomposição de L :
QKPL
Uma vez que destas matrizes, até ao momento, apenas se conhece K , há que
determinar as restantes.
Para um dado valor próprio Kk, escreva-se o sistema anterior que determina os
respectivos valores de Pmk
, componentes do vector próprio correspondente:
kkk PKPL
ou seja, para cada k (isto é, para cada valor próprio):
kmk
i
kiim PKPL ,,, com m = 1,2,...,n (componente de cada vector)
ou, desenvolvidamente:
jkkjkjjkkjkkjkj
kkkkkkkkkkk
kkkk
kkk
PKPLPLPLPLjm
PKPLPLPLkm
PKPLPLm
PKPLm
2211
2211
2222121
1111
2
1
Porém, a matriz L obtém-se a partir das matrizes destruição e formação,
conforme o estabelecido anteriormente:
jiBK
jiK
ji
L
ijj
jij
0
ou ijijjij BKL
pelo que substituindo nas expressões anteriores, teremos:

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 15 -
0
0
02
01
222111
222111
221211
11
jkkjkkjkkkjkj
kkkkkkkk
kkk
kk
PKKPBKPBKPBKjm
PKKPBKPBKkm
PKKPBKm
PKKm
As primeiras k-1 equações conduzem a Pjk
= 0 , com j < k . A equação de
ordem k é uma identidade, pelo que a indeterminação do sistema forçada pela equação
característica nos permite considerar arbitrariamente, Pkk
= 1.
As restantes equações definem todos os elementos, Pjk
para j > k :
1j
ki
ikjiijkkj PBKPKK
Poder-se-á escrever, então:
kjKK
PBK
kj
kj
P
kj
j
ki
ikjij
jk
1
1
0
Para determinar os elementos da matriz Q , inversa de P , poderemos recorrer
à relação IQ P , que conduz a:
ij
jik
kjik QP ,
ji
e, portanto, com j< k < i, de onde se pode tirar uma formula de recorrência para os
Qij:
jiQP
ji
Qi
jk
kjikij
1
1
A partir da factorização desenvolvida, o cálculo da exponencial que figura na
integração da EQUAÇÃO GERAL DA COMINUIÇÃO resulta simplificado:

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 16 -
QKPtL t .)exp()exp(
e, como K é matriz diagonal,
EKK ijij )exp()exp(
teremos, finalmente,
)0()( fQEPtft
expressão cuja manipulação se torna viável em qualquer algoritmo de cálculo através
das definições anteriormente deduzidas para as matrizes P e Q , e que exprime a
solução analítica da integração do sistema de equações diferenciais que modelam a
moagem linear (modelo batch).

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 17 -
3. SISTEMAS DE FLUXO CONTÍNUO
MODELOS PARA MOAGEM EM REGIME PERMANENTE
ESTACIONÁRIO
A passagem ao regime de fluxo contínuo faz-se, em geral, a partir da equação
do regime batch. Aliás, já no modelo de fragmentador graúdo, desenvolvido no
parágrafo anterior, se chamou a atenção para o facto de que o uso do modelo batch
integrado ao longo dum tempo de residência igual para todas as partículas,
corresponde à aceitação implícita dum regime contínuo de transporte perfeito.
Independentemente do modelo de regime de transporte aceite, a formulação
dum processo em contínuo a partir do batch obtém-se, genericamente, aproximando-a
ao comportamento médio do sistema ponderado pela respectiva distribuição de
tempos de residência (RTD), isto é:
0
)()(*)( dtttftf BC
em que BC ff e são as composições granulométricas finais em regime contínuo e
em batch, respectivamente, e (t) a distribuição de tempos de residência, RTD, tal
que, (t).dt representa a fracção de partículas que reside no interior do moinho um
tempo entre t e t+dt, sendo t* o tempo aparente de residência da respectiva RTD
(3) .
No parágrafo anterior apresentou-se a integração analítica das equações da
moagem batch na forma:
)0()( B
t
B fQEPtf
sendo
)exp( , tKE ii
t
uma matriz diagonal (Ki,j é elemento da matriz destruição), a única dependente
directamente da variável de integração, t. Deste modo a equação do contínuo virá:
)0()(*)(0
B
t
C fQdttEPtf
)0()()exp(0
, Bii fQdtttSP
A expressão integral pode ser resolvida para cada forma concreta de RTD
utilizada. Concretamente, para os casos simples de transporte perfeito (plug flow) e
de mistura perfeita (perfect mixing) as expressões são facilmente dedutíveis:
3 Note-se que t* é um parâmetro e não uma variável e que *)(tfC é função desse pa-
râmetro e não função de t. Com efeito, a integração em t fez cair a dependência ini-
cial de )(tf B em t.

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 18 -
a) No caso do transporte perfeito (pug flow) ou também designado por
transporte de pistão, a RTD é um Dirac:
( ) ( * )t t t
pelo que a expressão integral anterior assume a forma dum integral de
convolução por um Dirac centrado em t*, que, como se sabe, é dado pelo valor
da função na origem do Dirac
*
0*)(
tt
EdtttE
, ou substituindo a matriz t
E pelo valor de
cada um dos seus elementos da diagonal:
*)exp(*)()exp( ,0
, tKdttttK iiii
Esta expressão quando substituída na equação do contínuo conduz exac-
tamente à equação do batch. Este resultado justifica formalmente os
procedimentos anteriores em que se associou o regime contínuo de transporte
perfeito ao regime batch;
b) Para a mistura perfeita (perfect mixing) a RTD tem a forma já anterior-
mente deduzida:
)*
exp(*
1)(
t
t
tt
que, por substituição no integral da equação do contínuo aplicada a cada
elemento da diagonal da matriz t
E , conduz a:
dtt
Ktt
dtt
t
ttK iiii
0,
0, )
*
1(exp
*
1)
*exp(
*
1)exp(
*1
1))
*
1(exp(
*
1*
1
*
1
,0
,
, tKtKt
t
tKt ii
ii
ii
Deste modo, a integração analítica do modelo contínuo, em regime perma-
nente estacionário, para fluxo de mistura perfeita é obtida substituindo o termo
integral pelos valores da última expressão deduzida, organizados segundo a
forma duma matriz diagonal.
Contudo, é sabido que estes dois regimes de fluxo são apenas aproximações
válidas em alguns raros casos práticos. Nomeadamente no caso dos fragmentadores é
difícil justificar a existência simples de estes dois comportamentos extremos.
No entanto, do ponto de vista exclusivamente teórico, é concebível promover
associações de misturadores perfeitos em série, configuração que impedirá a saída do
sistema de partículas com tempos de residência muito curtos, probabilidade que
aumentará à medida que aumenta o número de unidades em série que se utilizam para
representar o sistema. Demonstra-se que no limite, quando o número de unidade

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 19 -
misturadoras em série tende para infinito o sistema comporta-se como sendo um
transportador perfeito, isto é, todas as partículas têm o mesmo tempo de residência.
Ora, aceitando-se que a associação em série de misturadores é uma forma de
impedir a saída de partículas com tempos de residência muito curtos, situação que o
senso comum associa ao funcionamento normal de um moinho de tambor tradicional,
negando assim a validade do modelo de misturador simples, a utilização de cascatas
de misturadores – em série ou mesmo com ramos em paralelo – é uma solução
tecnicamente utilizada por muitos autores para simular regimes de transporte contínuo
em moinhos de tambor. Por exemplo, é comum utilizar um transportador perfeito em
paralelo com um misturador, servindo este para simular o atravessamento rápido
típico das partículas finas e, aquele, o atraso dos graúdos.
Note-se, no entanto, que estes modelos, embora com todos os defeitos que lhes
são conhecidos, continuam a ser utilizados apenas porque facilitam extraordinaria-
mente a integração no tempo da equação da moagem em contínuo. Em qualquer outra
formulação as equações são de tal modo complexas que não são integráveis
analiticamente, sendo necessário procurar a solução por via numérica.
Assim, quando se utilizam estes modelos com alguma eficácia, isso apenas
quererá dizer que os dados foram minimamente ajustados pelo modelo e que este pode
ser usado para representar a realidade a que se ajustou. Contudo, em caso algum
poderá aceitar-se que a morfologia da associação em série, ou em paralelo, que foi
imaginado, corresponda a qualquer descrição fenomenológica minimamente realista
do processo de transporte das partículas no interior do moinho. Um modelo construído
desta forma, a partir do momento em que é usado na forma integrada, deixa de
depender da variável tempo. A este tipo de modelos costuma dar-se a designação de
modelos de constantes concentradas.
Quando este tipo de aproximação for aceitável, face à fiabilidade desejada
para a previsão, e a solução analítica for um imperativo para acelerar a velocidade de
cálculo, vários autores têm sugerido para o caso dos moinhos de tambor a associação
em série de um misturador perfeito de grande volume com dois misturadores
igualmente perfeitos mas mais pequenos. Neste caso ou se processa o cálculo em três
fases sucessivas correspondentes aos três estágios, o primeiro, de tempo de residência
t1, partindo da alimentação inicial e o segundo e o terceiro partindo dos produtos
descarregados, respectivamente, pelo primeiro e pelo segundo, com tempos de
residência iguais, t2 , ou, de uma vez só, usando a expressão global:
22,1, 1
1
1
1
tKtKiiii

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 20 -
4. TRANSPORTE DIFERENCIAL NO CALIBRE
A experiência de simulação de moinhos de barras – caracterizados por uma
fortíssima selectividade do mecanismo de transporte face ao calibre das partículas –
tem mostrado de modo muito claro a ineficácia dos modelos de fluxo descritos nos
parágrafos anteriores, mesmo alguns bem sofisticados como os que possuem à cabeça
um classificador que encaminha as partículas graúdas para o modelo de transporte
perfeito enquanto permite que os finos percorram uma cascata de misturadores.
Embora seja uma tentativa legítima de tentar um modelo de parâmetros concen-
trados para fazer alguma fenomenologia, a solução terá de ser procurada assumindo
de raiz o objectivo de simular um transporte verdadeiramente selectivo no calibre.
Relativamente a uma possível classificação dos modelos consoante a sua
capacidade de descrição fenomenológica, merece a pena referir um parágrafo dum
artigo de Herbst & Fuerstenau. Os vários tipos de modelos podem ser classificados de
acordo com o detalhe físico que descrevem e com a complexidade experimental e
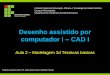
computacional associada ao seu uso. Na figura seguinte representa-se esquematica-
mente uma classificação genérica proposta por esses autores.
Cada tipo de modelo está referenciado a um nível do diagrama. Os níveis, de I
a V, estão organizados em ordem ascendente de complexidade do detalho físico,
matemático e computacional.
PARÂMETROS DISTRIBUÍDOS
TRANSPORTE E CLASSIFICAÇÃO
IV - FRAGMENTAÇÃO NÃO-LINEAR,
III - FRAGMENTAÇÃO LINEAR,
TRANSPORTE E CLASSIFICAÇÃO
PARÂMETROS DISTRIBUÍDOS
II - FRAGMENTAÇÃO LINEAR
TRANSP. e CLASS. CONDENSADOS
I - MODELOS DE CORRELAÇÃO
V - MODELOS FENOMENOLÓGICOS
NÍVEIS DE COMPLEXIDADE
DOS MODELOS DE SIMULAÇÃO
No nível I todos os sub-processos físicos como, por exemplo, a cinética da
fragmentação, a cinética do transporte e os fenómenos de classificação são
representados por uma simples equação do tipo correlação. Esta equação, sendo o
resultado duma série de integrações nas variáveis intervenientes no processo e na
extensão dos seus domínios de variação, não revela já a dependência explícita nessas
variáveis. A este tipo de modelos é corrente chamar modelos de parâmetros concen-
trados (lumped models). Um exemplo típico são as anteriores Curvas Padrão para
simulação de granuladores, a Lei de Bond para a moagem, etc. Os modelos de
transporte apresentados no parágrafo anterior são do tipo de parâmetros concentrados,
pois referem globalmente o regime estacionário de um transporte através de uma
RTD. O leitor poderá reanalizar, à luz destes novos conceitos, os desenvolvimentos

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 21 -
então deduzidos e confirmar que nesses modelos a variável tempo deixou de fazer
parte do modelo (porque foi efectuada uma integração ao longo do seu intervalo de
variação), ficando apenas dependentes dum parâmetro (e não variável!) que se
designou por tempo aparente de residência, t*. Estes modelos, de um modo geral, são
apenas válidos quando as cinéticas de fragmentação e de transporte são, em primeira
aproximação, independentes do calibre.
No nível V os modelos são desenvolvidos a partir de princípios primeiros e,
consequentemente, garantem legitimidade às extrapolações necessárias à previsibili-
dade desejada. São o limite máximo da performance dos modelos. Infelizmente, este
nível de sofisticação é frequentemente inatingível devido à complexidade, quer dos
fenómenos naturais que os modelos tentam reproduzir, quer da estrutura matemática e
computacional a que o detalhe da descrição física por vezes obriga.
4.1 - Um Modelo Fenomenológico para Moinho de Barras
Em primeiro lugar e antes de avançarmos para a descrição do modelo, é
conveniente relembrar que, como atrás foi dito, os modelos deste tipotem por base a
fenomenologia do processo, aparecendo as RTD's como resultado desse mesmo
processo e não como ponto de partida para qualquer ajuste.
Assim, a estrutura fundamental do modelo assenta numa constatação factual
que pode ser sintéticamente descrita da seguinte forma: dentro de um moinho de
tambor, o minério constitui um obstáculo à sua própria passagem.
Dentro desta linha de pensamento, e se se considerar o moinho dividido em n
volumes elementares v, podemos dizer que as partículas contidas em cada um desses
volumes, definido por duas secções transversais contíguas, s, e separadas por uma
distância l, constituem um obstáculo às partículas que se encontram no volume
elementar imediatamente anterior. Se no limite l0, podemos supôr cada volume
elementar reduzido a uma secção filtrante que actua selectivamente sobre as partículas
que tentam atravessá-la em função de factores como o calibre, a fluidez de polpa ou a
densidade dos grãos. Este obstáculo ao avanço das partículas é representado, em
termos de modelo, por um conjunto de n funções (uma por cada volume elementar)
que podem entrar em conta com alguns ou todos esses factores. A cada uma dessas
funções dá-se o nome de função de passagem.
O transporte é então modelado à custa do conjunto destas funções, cada uma
das quais se decompõe, por sua vez, num parâmetro PSi, que avalia o nível de
saturação da zona activa de moagem e o transporte das partículas fora desta zona, e
num filtro que vai comandar o transporte nessa mesma zona activa. Este filtro é por
sua vez uma função ajustável e bem definida que pode ser comandada por dois
parâmetros, PVi
50 e PFi, que dão indicações respectivamente sobre a estrutura
granulométrica da polpa e a sua fluidez.
Os n parâmetros PVi
50 estão por sua vez condensados em apenas dois, PVn
50 e
PM, do seguinte modo:
50
1
50
2
50
1
50 ,,, nn PVPVPVPV
sendo

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 22 -
505050
nii PVPVPMPV
Quanto à função de passagem, toma a seguinte forma para cada moinho
elementar i
j
iijijii VLFtQ ,,
representando
Fij - é o filtro, função de PVn
50 e de PF que nos vai indicar a
probabilidade de passagem de cada calibre j do moinho i ao
moinho i+1 seguinte;
i - o estabilizador de passagem de cada moinho que garante o
cumprimento do princípio da conservação da massa;
Lij - distribuição granulométrica do moinho elementar i;
Vi - volume mássico do moinho elementar i;
Qi - caudal mássico do moinho elementar i ;
t - intervalo de tempo em que é feita cada observação.
Das variáveis apresentadas, Vi pode ser determinado experimen-
talmente, Lij calculado indirectamente através da cinética de moagem e Fij arbitrado.
O estabilizador de passagem i vai ser calculado a partir dos restantes, dando origem
à função de estabilidade de passagem.
Este estabilizador de passagem, representa a percentagem do volume do
moinho elementar mi que é necessário submeter à filtragem para se obter a massa dos
diferentes lotes que irá transitar para o moinho elementar seguinte (mi+1). Ao mesmo
tempo, este estabilizador, garante que o caudal total que está a atravessar esse volume
elementar, satisfaça as condições impostas pelo filtro F.
A não linearidade do modelo ocorre de uma forma activa, quando as
características da alimentação sofrem oscilações violentas que obrigam à subida do
valor de i que, quando atinge o seu valor máximo admissível para as condições
normais de funcionamento, em termos de previsibilidade do modelo, vai alterar os
parâmetros do filtro de modo a que essas condições de previsibilidade se mantenham.

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 23 -
5. PARTICULARIDADES DA MOAGEM BOLAS E BARRAS
AS NÃO-LINEARIDADES INTRÍNSECAS
No modelo geral da cominuição anteriormente apresentado à Matriz de
Transição T , ou à Matriz Alteração da Composição L , atribuiu-se toda a respon-
sabilidade na caracterização quantitativa das propriedades, quer do minério sob o
ponto de vista da sua triturabilidade, quer do moinho, tambor e carga, já que em si
mesma integra os dois fenómenos físicos típicos dum processo de fragmentação: a
destruição, normalmente relacionada mais de perto com a energia consumida e com a
triturabilidade do minério, e a formação frequentemente associada às características
texturais do minério. Se essa matriz de transição tem por função descrever as
condições operatórias do moinho a laborar com um dado minério, então os seus
valores deverão, forçosamente, variar com as características desse minério, com o
rgime de funcionamento da máquina e com as particularidades do agente fragmen-
tador, podendo ou não variar com o tempo. No caso mais simples da invariabilidade
no tempo, diz-se que o processo de cominuição é linear ou homogéneo no tempo.
Quando a função transição varia, directa ou indirectamente, com o tempo o
modelo torna-se mais complexo e a fragmentação passa a designar-se por não-linear,
do tipo paramétrico no caso da variação directa e strictu senso no outro caso. Esta
dependência da matriz transição pode resultar basicamente:
da degradação das condições de moagem, devida a desgastes dos agentes de
fragmentação ou a desafinações - caso paramétrico;
do carácter colectivo da fragmentação inerente ao processo de moagem em
moinhos de tambor, que acarreta para a função de transição uma
dependência das características granulométricas da carga, na medida em
que certos lotes passam a interferir na fragmentação de outros. Neste
sentido, uma vez que a evolução no tempo da composição granulométrica
da carga é a própria essência do fenómeno da cominuição, a matriz
transição varia indirectamente com o tempo e a moagem apresenta o refrido
comportamento não-linear strictu sensu.
Pela formulação apresentada para as não-linearidades propriamente ditas o
processo de moagem e, por arrastamento, a função de transição, variará com a
quantidade maior ou menor de determinados lotes, em dado instante, na medida em
que estes interferem com a moagem de outros lotes, de maior ou menor calibre,
também presentes na máquina nesse instante.
Distinguem-se dois tipos distintos de situações:
os diferentes lotes competem segundo o seu calibre por uma zona
activa de fragmentação;
determinados lotes presentes dificultam a acção dos agentes de
fragmentação sobre outros.
Qualquer uma destas situações influencia fundamentalmente a função
destruição, Ki, que passará a ter uma formulação condicional do tipo K
i(tC
i(t)),
podendo ou não afectar a função formação. Genericamente este comportamento pode
ser explicitado como segue:
m
mmjjj
m
jmmjij CZKKKCZCK ,, 1

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 24 -
em que Ci representa a composição granulométrica total no instante considerado, C
m a
fracção granulométrica correspondente ao lote m e Zj,m
a influência da presença deste
lote na destruição Kj do lote j .
Da prática corrente com moinhos de tambor são particularmente conhecidos
dois mecanismos que ilustram esta situação:
efeito de escudo (umbrella) em que as maiores partículas protegendo as
mais pequenas da acção dos agentes fragmentadores, lhes fazem diminuir a
destruição. Este efeito é típico no moinho de barras e largamente
conhecido na prática industrial por ser responsável pela fraca produção de
finos, característica deste tipo de moinhos;
efeito de colchão (mattress) em que as partículas de menores dimensões
funcionam como amortecedores à acção dos agentes fragmentadores sobre
os calibres maiores. Corresponde a uma diminuição da transmissão de
energia das bolas ou barras para as partículas em presença e, como tal, a um
abrandamento global da destruição dos graúdos.
Na medida em que estas não linearidades strictu sensu possam ser descritas
como efeitos da composição granulométrica da carga sobre os diferentes parâmetros
de moagem, é possível uma análise fina do processo com base em fenómenos
fisicamente identificáveis.
Este tipo de análise contrasta fortemente com as descrições formais e ou
empíricas tão caracterísricas da cinética química. Com efeito é a partir da definição
das não-linearidades que a teoria cinética da moagem se afasta da metodologia e dos
formalismos da teoria cinética química, teoria de que, historicamente, foi a grande via
de acesso. Note-se, de passagem, que adoptar uma tal formulação para as não-
linearidades, fazendo-a incidir sobre a variabilidade no tempo das velocidades
cinéticas, permite continuar a utilizar uma cinética de primeira ordem, atribuindo-lhe
a justificação física corrente, para simular um processo não-linear!
Finalmente convém chamar à atenção que o uso deste tipo de formulações
para os fenómenos não-lineares obrigará, necessariamente, que o sistema de equações
diferenciais que representam a cinética de primeira ordem da cominuição seja
integrado numericamente.

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 25 -
6. MÉTODOS PARA CÁLCULO DO REGIME PERMANENTE
EM CIRCUITO FECHADO
6.1 Equação do Circuito Fechado utilizando um Modelo de Curva Padrão
O Modelo de Curva Padrão, usado frequentemente para simular o funciona-
mento dos fragmentadores graúdos, de maxilas ou cones, é, por definição, um modelo
de transição finita, que descreve, portanto, um evento singular de fragmentação.
Todavia, para além dessa limitação, esse modelo é ainda mais limitado porque, como
tivemos oportunidade de analisar, é insensível às variações granulométricas da
alimentação. Para superar essa limitação, este modelo só é aplicável a máquinas de
tempo de residência semi-fixo e baixo e em circuitos com alimentação classificada à
cabeça.
Com base nesta concepção, resulta evidente que, para um dado fragmentador
graúdo, afinado a uma dada regulação e descrito por uma curva (cumulante)
granulométrica padrão imutável, a previsão da sua descarga apresenta uma
invariabilidade da percentagem de redução a qualquer calibre. Obviamente que,
quando o fragmentador está em circuito fechado, admite-se que a percentagem q de
redução abaixo do calibre de corte do classificador é constante
Assim, quando o fragmentador estiver num circuito fechado em regime
permanente estacionário (steady state), então o caudal de entrada é igual ao da
descarga. Isto é:
P = A
Mas, conhecendo a Curva Padrão que representa o funcionamento do fragmen-
tador, e admitindo para o crivo uma Partição em Degrau Perfeito, virá que os caudais,
P de produto final e R de retorno, se exprimem por:
P = M . q
R = M . (1-q) (ver Nota no fim do parágrafo)
Quando o circuito estiver em equilíbrio (regime permanente estacionário),
então o caudal através do fragmentador, M, será dado por:
+
P,pi R
A,fi
M,mi

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 26 -
q
A
q
PM
expressão já conhecida desde a disciplina de Fragmentação e utilizada nos trabalhos
práticos para calcular o Circuito Fechado de um Fragmentador Graúdo, após
estabilização.
A Curva Padrão pode ser representada por uma Cumulante clássica (SG, RR ou HH), )()()( 11 ii
x
xi xwtxwtxwtm i
i
Admitindo o Classificador Perfeito, com Partição em Degrau de Heaviside h(x), então a composição do Produto Final pi virá em
função da Curva Padrão mi, dada por:
i
ii
iii
xhmM
xhmMp
)(
)(
, expressão cujo denominador representa o Caudal i
ii xhmMP )(
e, como, por definição, a percentagem de redução q, de material reduzido pelo fragmentador a calibre inferior ao calibre de corte
é dada por
)(.
i
i
i
xi
i xhmmqi
vem que qMP c.q.d
Quando o Classificador for descrito por uma partição )(i , então a anterior expressão de pi será dada por
i
i
i
i
i
ii
im
im
imM
imMp
))(1(
))(1(
))(1(
))(1(
6.2 Equação Global do Circuito Fechado em
Regime Permanente Estacionário
Para o estabelecimento da equação genérica que simula a fragmentação ope-
rada num circuito fechado em regime permanente estacionário (steady state) vai
ser necessária a equação do regime contínuo anteriormente deduzida, incluindo a
RTD mais aconselhada para o moinho em questão, bem como a descrição cinética do
classificador usado para o fecho do circuito, que permitirão escrever as equações de
balanço de cada calibre nos vários nós do circuito. No caso em análise o classificador
vai ser descrito exclusivamente por uma matriz classificação, C , matriz diagonal
cujos elementos representam uma Curva de Partição de Tromp.
Na figura seguinte, representaremos por letra minúscula as matrizes vector dos
histogramas de calibre de cada fluxo, enquanto a letra maiúscula representa o
respectivo fluxo mássico.
F H H F
f a h p_ _ __
TC=
=
De acordo com o que já anteriormente foi estabelecido, a matriz transição da
moagem em fluxo contínuo é representada por:
QdtttKPtT ii
0, )()exp(*)(
Recordaremos que P e Q são matrizes inversas construídas com os elementos
das funções Destruição e Formação, respectivamente Kii e Bij e (t) é a distribuição de
tempos de residência (DTR) do transporte no interior do moinho, sendo que (t).dt

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 27 -
representa a fracção de material que reside no interior do moinho ente t e t+dt
unidades de tempo.
Como vimos, quando o Transporte for Perfeito (pistão ou plug flow), a DTR é um
Dirac centrado no tempo de residência t* e o resultado do integral definido é uma
matriz diagonal de elementos exp(-Kii.t*). Quando se admitir um Transporte de
Mistura de tempo médio de residência t*, após integração, os elementos da diagonal
dessa matriz serão os quocientes:
*
,1
1
tK ii
Surge então como evidente que a matriz de transição da moagem em
regime contínuo, )( *tT é uma função de t*, tempo médio de residência da RTD
(t) que for utilizada, o qual, por sua vez, terá que ser entendido como função do
volume útil (mássico) do moinho V e do caudal mássico que o atravessa, H:
*
H
Vt
Assim sendo, a expressão da moagem em contínuo evidencia a dependência da
matriz transição em fluxo contínuo no caudal mássico que alimenta o moinho.
aTatThH
V )( *
Com base nestes pressupostos, admitamos que o anterior circuito se encontra
em regime permanente estacionário, única circunstância em que poderemos admitir
que é satisfeito o princípio da conservação da massa e se podem escrever as
respectivas equações de balanço.
Assim, a composição que alimenta o moinho resulta directamente da equação
de balanço de massa no nó de mistura:
H
hCHfFa
, mas como atTh )( *
virá que
H
hCHfFTh
e, portanto hCTHfTFhH
Se se admitir que a matriz de classificação, C , não depende substancialmente
da composição granulométrica h que alimenta o classificador, então a complexidade
da anterior expressão pode ser reduzida, colocando h em evidência.

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 28 -
fThCTIF
H
Após multiplicação à esquerda,
fTCTIhF
H
1
e, tomando em consideração a identidade 11
TCITTCTI
teremos: fTCIThF
H
1
Finalmente, considerando o balanço material em cada calibre em volta do nó
do classificador, teremos:
hHCIhCHhHpF
pelo que
hF
HCIp
Por substituição do valor determinado acima, chegaremos à expressão que
define a composição granulométrica final produzida pelo circuito fechado à custa da
matriz transição (função do tempo aparente de residência), da matriz classifi-
cação e da composição granulométrica do produto inicial:
fTCITCIp
1
Equação equivalente poderá ser escrita para o circuito fechado com
classificador à cabeça:
F H
f a h
p
_ __ _T
C=
=
m
M
_F
As equações cinéticas da moagem e da classificação permitem escrever:
mM= e CaHaHThH
pelo que
m CTMhH
e do balanço no nó mistura vem:

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 29 -
hHfFmM e substituindo na anterior,
hCTHfCTFhHfFCThH
fCTFhCTIH
ou seja,
fCTCTIhF
H
1
Finalmente, da equação de balanço no nó do classificador é possível tirar:
hHfFCImMCImCMmMpF
e de seguida, por substituição da equação anterior,
fCTCTIfCIp1
ou, finalmente, usando a distributividade à direita e a comutatividade da soma de
matrizes, obteremos a equação geral para o circuito fechado de moagem com
classificador à cabeça em regime permanente estacionário:
fICTCTICIp
1
Uma manipulação algébrica semelhante à seguida na dedução do Modelo de Lynch (que contempla internamente um Circuito Fechado co m Classificador à Cabeça, como o que aqui está a ser estudado, permite chegar a uma equação equivalente:
As equações cinéticas da moagem e da classificação permitem escrever:
aTHhH e )( mCHFaH
pelo que
m)( CTHFhH
e do balanço no nó mistura vem:
mHFhHfF )(
mCTIHFfF
mHFmCTHFfF
)(
)()(
de onde se retira
mHFfCTIF
)(1
Da equação de balanço no nó do classificador é possível tirar:
mCIHFpF
)(
e por substituição da equação anterior,
fCTICIFpF
1
ou, finalmente,
fCTICIp 1

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 30 -
Um olhar atento para as rotinas que acabam de ser expostas permite concluir
que o método seguido consistiu no estabelecimento dum sistema de equações
lineares obtidas directamente sobre todas as unidades processuais do diagrama, a
saber:
o nó de mistura, considerada perfeita;
a unidade de fragmentação, descrita pela equação geral de fluxo contínuo;
a unidade de classificação, descrita pela sua curva de partição.
Contudo, como o caminho analítico seguido para obter a equação final deseja-
da camuflou ligeiramente esse sistema de equações, em favor duma exposição mais
genérica, que abre perspectivas de utilização da mesma metodologia para cálculos
completos de circuitos, é importante repor a estrutura global do sistema.
Genericamente, o cálculo dum circuito envolve a determinação de caudais e
de composições de todos os circuitos admitindo conhecidos o caudal e a composição
da alimentação e os modelos das unidades de processo, devidamente parametrados.
No caso do classificador aos pés o assunto coloca-se com toda a generalidade
na seguinte base:
1. Número total de incógnitas em presença (admitindo 10 classes de calibre):
- caudal H 1 incógnita;
- vector a 10 incógnitas
- vector h 10 incógnitas
- vector p 10 incógnitas
Total 31 incógnitas
2. Número total de equações escritas:
aTh 10 equações
H
hCHfFa
10 equações
hF
HCIp 10 equações
Total 30 equações
3. Para a determinação do sistema é necessário escrever mais uma equação
independente. Note-se, de passagem, que no problema anterior só foi possível
chegar à solução porque, na verdade, se prescindiu da obtenção directa dos
vectores a e h e do caudal H. Para escrever a equação em falta recorde-se
que as equações de balanço manipulam sempre massas, ou caudais mássicos,
sendo os histogramas de composição obtidos por normalização sobre os cau-
dais totais. Assim, por exemplo, o caudal de retorno, dado por H-F obtém-se
somando os caudais mássicos de todos os calibres desse fluxo, ou seja,
somando todos elementos do vector representante desse fluxo:
4.
i
hCHFH 1 equação

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 31 -
Se, porventura, estivéssemos também interessados na composição granulo-
métrica deste produto de retorno, obviamente que ao problema seriam
acrescidas mais 10 incógnitas, pelo que seria necessário introduzir as
respectivas equações, na forma:
hCFH
Hr
10 equações
O leitor com facilidade reformula o problema para o caso do circuito com
classificador à cabeça, com base nas equações anteriormente escritas.
6.3 Método Iterativo para cálculo de um Circuito Fechado
Porque, frequentemente, o método anterior se torna demasiado laborioso na
especificação de todas as equações e preparação dos dados de modo a serem
introduzidos em rotinas de resolução de sistemas de equações lineares, é costume
usar-se um método iterativo para resolução do problema que consiste basicamente
em cortar um ramo do ciclo fechado de cálculo e resolvê-lo por refinamentos
sucessivos a partir dum guess inicial.
Todavia, antes de avançar por este método, convém evidenciar uma grave
lacuna, ou mesmo defeito, imputável ao método anterior que reside na
impossibilidade de reajuste da matriz de transição para os diferentes valores do
caudal mássico que aflui ao moinho! Com efeito, foi devidamente anotada a
dependência da matriz transição nesse caudal através do tempo médio aparente, t*, da
respectiva RTD, mas, contudo, o sistema de equações lineares, embora admita o
caudal H como uma incógnita, a solução só é alcançável em face de valores de T
constantes, isto é, não ajustáveis ao valor de H, só conhecido a posteriori.
Neste ponto reside a grande objecção a fazer ao método anterior, nome-
adamente em problemas de modelagem em que se pretende estudar as vantagens das
diminuições dos tempos de residência, por aumento dos caudais de atravessamento
dos moinhos, casos em que se justifica o uso do método iterativo.
Em termos práticos, no método iterativo escrevem-se todas as equações na
forma em que foram apresentadas anteriormente, pela respectiva ordem a partir da
ramo do circuito que foi cortado, ponto por onde se vai iniciar o cálculo. Porém, para
que este seja possível, vai ser necessário arbitrar (diz-se, normalmente, fazer um
"guess") das variáveis que funcionam como inputs dessa primeira operação.
Seguidamente, efectua-se todo o cálculo do circuito, sequencialmente, operação a
operação, até ao outro extremo do circuito onde se efectuou o corte. Uma vez
chegados a este ponto, já que foram calculadas todas as variáveis do circuito, deve
comparar-se o "guess inicial" com os valores calculados: se forem valores aceitáveis,
dentro da gama de erro preconizada, então o circuito atingiu a convergência e o pro-
cesso iterativo termina, caso contrário recomeça novo ciclo de cálculo, partindo agora
dos valores acabados de calcular e assim sucessivamente até à convergência final.
A grande habilidade está, não só em escolher um bom "guess" inicial, mas,
sobretudo, em estabelecer um bom critério de convergência capaz de reflectir os
objectivos do problema em estudo, pois a convergência absoluta pode ser difícil de
atingir. Por exemplo, os caudais podem estar razoavelmente estabilizados, mas a
gama de calibres finos ainda estar ainda a oscilar muito. Normalmente usa-se como

OPTIMIZAÇÃO DE CIRCUITOS E PROCESSOS
- 32 -
critério de convergência a diferença relativa entre dois valores consecutivos do
cálculo:
calculado
calculado -anteriorvalor =critério
a aplicar a cada componente do sistema -- caudais de sólidos, caudal de água, e
fracções granulométricas -- segundo os objectivos pré-definidos.
Podem ainda ser utilizados algoritmos aceleradores de convergência. Um dos
mais comumente utilizados é o algoritmo de WEGSTEIN que consiste basicamente
em intersectar a recta que une os dois últimos valores calculados com a recta y=x e
considerar a intersecção como novo guess. Se forem, por exemplo, x1, y1 e x2, y2,
respectivamente, "guess" e calculado nos dois últimos passos da iteração, então o
"guess" para o passo seguinte deverá ser dado pela intersecção referida, ou seja:
1221
21213
yyxx
xyyxx
Contudo estes algoritmos devem ser criteriosamente escolhidos sob pena de, se não
respeitarem a estrutura típica da evolução das variáveis em estudo, poderem conduzir
a desvios irreparáveis na busca da solução final.













![Avaliação da reatividade de calex[4]arenos e seus dimeros - Relatório Modelagem Molecular I](https://img.document.onl/doc/110x75/55b2b0fbbb61eb9b308b46cd/avaliacao-da-reatividade-de-calex4arenos-e-seus-dimeros-relatorio-modelagem-molecular-i.jpg)













