Embed Size (px)
Citation preview

MODELAGEM, IDENTIFICACAO E CONTROLE DO SISTEMA DEPOSICIONAMENTO UMA MAQUINA HIDRAULICA DE FADIGA
Diego Pereira-Dias†∗, Alessandro Jacoud Peixoto†, Ramon Romankevicius Costa†
∗Laboratorio de Ensaios Nao-Destrutivos, Corrosao e Soldagem (LNDC/COPPE/UFRJ)Universidade Federal do Rio de Janeiro , Rio de Janeiro, RJ, Brasil
†Programa de Engenharia Eletrica– COPPE/ Universidade Federal do Rio de JaneiroRio de Janeiro, RJ, Brasil
Emails: [email protected], [email protected], [email protected]
Abstract— This paper addresses modeling, simulation and control of a hydraulic machine and force frictionidentification applied to fatigue-corrosion tests conducted at Laboratorio de Ensaios Nao–Destrutivos, Corrosaoe Soldagem (COPPE/UFRJ). Position and force tracking problems are considered. Experimental and simulationresults are presented for position tracking. A force control strategy is proposed to compensate the specimenstiffness variation and its closed loop performance is evaluated via numerical simulations.
Keywords— Hydraulic actuated fatigue testing machine, friction identification, force and position tracking.
Resumo— Este artigo aborda a modelagem, simulacao e controle de uma maquina hidraulica e a identificacaoda forca de atrito, para ensaios corrosao-fadiga realizados no Laboratorio de Ensaios Nao–Destrutivos, Corrosaoe Soldagem (COPPE/UFRJ). O problemas de rastreamento de posicao e forca sao considerados. Resultadosexperimentais e simulados sao fornecidos para o rastreamento de posicao. Um esquema de controle de forca paracompensar a variacao da rigidez do corpo de prova e proposto e seu desempenho em malha fechada e avaliadopor meio de simulacoes numericas.
Palavras-chave— Maquina de ensaios mecanicos atuadas hidraulicamente, identificacao de atrito, rastrea-mento de posicao e forca.
1 Introducao
A industria nuclear, aeroespacial, de petro-leo, entre outras, tem a necessidade de realizarensaios exaustivos de materiais. Os testes reali-zados visam obter: garantia de qualidade, garan-tia de seguranca, desenvolvimento de produtos emateriais inovadores (Pereira-Dias et al., 2013),(Callister, 2001).
As maquinas de ensaios foram desenvolvidaspara contribuir no estudo da falha mecanica de-vido a fadiga (Cullen, 1985). Dentre estas ma-quina, as maquina de ensaios mecanicos atuadashidraulicamente (HTM) foram as primeiras a se-rem desenvolvidas por apresentarem: otima re-lacao forca/dimensao, boa dinamica para execu-cao desse tipo de ensaio e alta resistencia meca-nica (Merritt, 1967), (Jelali and Kroll, 2003) e(Pereira, 2006).
De acordo com a Figura 1, uma HTM e com-posta por: estrutura mecanica, cilindro hidrau-lico, unidade de potencia e condicionamento hi-draulico (UPCH), servo-valvula (SV), computa-dor/controlador, sensores de transducao de posi-cao, pressao e forca, valvulas de alıvio hidraulicos,garras e o corpo de prova a ser testado (Pereira-Dias et al., 2013).
Este trabalho e parte do desenvolvimento demaquinas de ensaios corrosao-fadiga realizado noLaboratorio de Ensaios Nao–Destrutivos, Corro-sao e Soldagem da COPPE/UFRJ, para aten-der as necessidades das descobertas do pre-sal.Uma maquina de fadiga necessariamente precisa
de um controlador de posicao, para procedimen-tos de pre-ensaio e um controle de forca aplicadasobre o corpo de prova (CP), respeitando as restri-coes das normas (ASTM-E647-08, 2008) e (ISO-12108, 2002). Estas sugerem que os ensaios te-nham um controle de carregamento preciso paranao gerar regioes de plastificacoes nos CPs.
EstruturaóMáquina
Controller
PC
TransdutordeóForça
Garras
FormaódeOnda
CorpodeóProva
ServoVálvula
UPCH
Motor
Reservatório
TransdutorPosição
CilindroóHidráulico
SistemaódeControleóeAquisição
IHM
Figura 1: Aspectos construtivos de uma HTM.Fonte: adaptado de (Pereira-Dias et al.,2013).
O controle de sistemas servo-hidraulicos pos-suem diversas dificuldades devido a dinamicaspouco amortecidas, nao-linearidade intrınsecas eincertezas parametricas (Cunha, 2001), (Assaffet al., 2010), (Valdiero, 2012). Alem disso, aidentificacao parametrica e difıcil de ser realizada
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
859

(Cunha, 2013), (Furst, 2001). Em (Sohl and Bo-brow, 1999), a estimativa dos ganhos das valvu-las e do modulo de compressibilidade do fluidoe realizada via mınimos quadrados. Em (Bouletet al., 1992), (Sohl and Bobrow, 1999), (Clarkeand Hinton, 1997) e (Kim et al., 2010) verifica-seque para um satisfatorio desempenho do sistemade controle faz-se necessario determinar os para-metros da planta precisamente. Uma revisao daspossıveis tecnicas de controle e fatores que influen-ciam uma HTM pode ser encontrada em (Pereira-Dias et al., 2013). Alem disso, tecnicas baseadasem inteligencia artificial para ensaios de fadiga saoabordadas em (Sanchez et al., 2012), (Alva, 2008).
Neste artigo, considera-se um esquema deidentificacao da forca atrito baseado somente emrealimentacao de velocidade e e proposto um es-quema de controle de forca baseado em um sinalde controle modulado em amplitude. Na Secao 2o modelo completo da HTM e apresentado e, naSecao 3, a metodologia de identificacao/validacaodo modelo forca de atrito e descrita. Um modelosimplificado para controle e obtido e identificadona Secao 4 e o controle de forca para ensaios defadiga e desenvolvido na Secao 5. Por fim, conclu-soes sao apresentadas.
2 Modelagem do Sistema
Nesta secao e apresentado o modelo completodo sistema hidraulico (Merritt, 1967), (Jelali andKroll, 2003). Doravante, assume-se que as grande-zas e parametros estao representados nas unidadesdo sistema internacional de medidas.
2.1 Servo-valvula
A Servo-valvula (SV) e o componente hi-draulico responsavel por controlar a potencia hi-draulica fornecida ao atuador hidraulico (cilindro)(Cunha, 2013). Normalmente, utiliza-se um con-junto composto por duas partes: o torque-motor(bocal-defletor) e o carretel da valvula. Neste tra-balho, utiliza-se uma SV com 4 vias (2 de en-trada e 2 de saıda para o cilindro). Aplicando-se uma corrente isv no torque-motor, o carretelda SV desloca-se proporcionalmente (xv). Algu-mas empresas fornecem um amplificador analogicoem conjunto com a valvula que tem a funcao deconverter um sinal de tensao u em um sinal decorrente isv, ou seja, isv = Kampu.
A modelo classico para este tipo de valvulade u para xv e dado por um sistema de segundaordem. Entretanto, aproximacoes de primeira or-dem (Cunha, 2001; Alleyne and Hedrick, 1995) eaproximacoes estaticas (Assaff et al., 2010; Sohland Bobrow, 1999) sao encontradas na literatura.Neste trabalho, assume-se o modelo estatico:
xv = Kemu . (1)
2.2 Dinamica das Pressoes
O atuador hidraulico mais comum e o atuadorlinear, ou cilindro hidraulico, que transforma ener-gia hidraulica em energia mecanica (Cunha, 2013).Ele esta interligado com a SV atraves de dois orifı-cios (A e B). Neste trabalho, o cilindro e simetricoe de acao dupla.
O deslocamento do carretel da SV permite apassagem de vazao para as camaras do cilindro.Assume-se que nao exista vazamentos na valvulae entre as camaras do cilindro.
Em particular, para uma valvula de centrosub-crıtico (Jelali and Kroll, 2003) a vazoes QA eQB de entrada/saıda das camaras A e B sao dadaspor:
QA =kv1 sg(xu1 + xv) sgn(PS − PA)p|PS − PA|
−kv2 sg(xu2 − xv) sgn(PA − PT )p|PA − PT | ,(2)
QB =kv3 sg(xu3 − xv) sgn(PS − PB)p|PS − PB |
−kv4 sg(xu4 + xv) sgn(PB − PT )p|PB − PT | ,(3)
sendo PS a pressao de suprimento, PT e a pres-sao de retorno, PA (PB) e a pressao da camara A(B), kvi (i = 1, . . . , 4) sao os coeficientes de des-carga da valvula e xuj (j = 1, . . . , 4) representaa diferenca entre o comprimento dos ressaltos e alargura dos porticos, que sao iguais para orifıcioscom identica geometria. A funcao sg e definidapor: sg(u) = u, para u ≥ 0 e sg(u) = 0, parau < 0.
Da equacao de continuidade (Merritt, 1967),o comportamento dinamico das pressoes pode serdescrito por:
PA =βeVA
[QA −Ap
dy
dt
], (4a)
PB =βeVB
[−QB +An
dy
dt
], (4b)
sendo βe o modulo efetivo de elasticidade volume-trica, Ap a area do pistao, An = Ap − Ar a areada regiao anular do cilindro, Ar a area da hastedo cilindro e VA e VB os volumes nas camaras Ae B dados por:
VA = Any , (5)
eVB = An(L− y) , (6)
sendo y a posicao do pistao e L o comprimento docilindro.
2.3 Equacao de Movimento do Cilindro
Considerando o sistema sem carga (corpo deprova e garras), desprezando a massa do fluido eaplicando a segunda lei de Newton ao movimentodo pistao, tem-se que:
FH − Fg − Ff = Mty , (7)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
860

sendo Mt a massa do pistao, Fg = Mtg a forcagravitacional (para cilindro montado na posicaovertical), Ff a forca de atrito e FH a forca hidrau-lica (para cilindros simetricos) dada por:
FH = AnPA −AnPB = An(PA − PB) . (8)
Observacao A forca de atrito neste trabalho de-pende estaticamente da velocidade do pistao (y)e sera caracterizada mais adiante. Sendo assim,de (1), (2), (3), (4a), (4b), (5), (6), (7) e (8), umsistema nao-linear de quarta ordem com vetor deestado x :=
[PA PB y y
]T e entrada u re-presenta adequadamente a planta hidraulica.
3 Metodologia para Identificacao daForca de Atrito
Nesta secao sera descrita a bancada experi-mental utilizada para identificacao da forca deatrito e a metodologia de identificacao.
3.1 Bancada Experimental
Para extrair as dinamicas dominantes do sis-tema em estudo e validar o modelo de atrito desen-volvido, foram realizados experimentos em umabancada de teste do Laboratorio de Ensaios Nao–Destrutivos, Corrosao e Soldagem da UFRJ. O sis-tema desenvolvido no LNDC permite a aquisicaodos seguintes sinais a uma taxa de amostragem de500Hz: PA, PB , y, y.
Esta bancada e constituıda por: um cilin-dro, uma servo-valvula, transdutores de posi-cao/velocidade e pressao e uma valvula propor-cional para regular a pressao de suprimento.
O cilindro hidraulico (simetrico de duplaacao), da Bosch Rexroth Ltda., possui diame-tro do embolo de 0.08, diametro da haste de0.056, e curso de 0.2 (SI). O transdutor de po-sicao/velocidade micro-pulsado, fabricante Bal-luff, utiliza tecnologia CANOpen para a comuni-cacao. O cilindro e comandado por uma servo-valvula acionada por uma carta eletronica externa(Bosch Rexroth), que apresenta vazao nominal de75 [ l/min ] quando a diferenca de pressao por viada valvula e de 70 [ bar ]. A carta externa recebeum sinal analogico de ±10 de tensao e convertepara corrente, comandando o carretel da servo-valvula. Tres transdutores de pressao estao po-sicionados na bancada para medir a pressao desuprimento da unidade hidraulica do laboratorioe as pressao nas camaras A e B. Os sinais sao ad-quiridos por cartas analogicas da National Instru-ments e processados por um sistema embarcadode tempo real (NI CompactRIO 9401). O soft-ware de interface com o usuario dos experimentosfoi codificado em Labview ®.
3.2 Identificacao da Forca de Atrito
Alem das nao-linearidades intrınsecas do atu-ador hidraulico, o levantamento do modelo daforca de atrito nao e uma tarefa trivial, princi-palmente durante movimentos em altas velocida-des do pistao, quanto a temperatura varia e di-ficulta o processo de identificacao. Neste traba-lho, considera-se: baixas valores de |y|, a ausenciade carga (corpo de prova) e um modelo para aforca de atrito que dependa apenas estaticamentede y. Assume-se que a forca de atrito possa serdescrita pelo seguinte modelo de Stribeck (Jelaliand Kroll, 2003; Canudas-de-Wit et al., 1995):
Ff = Bv y + sgn(y)(Bc +Bse
−|y|/Cs
), (9)
sendo Bv o coeficiente de atrito viscoso, Bc o coe-ficiente de atrito de Coulomb, Bs o coeficiente deatrito estatico e Cs e conhecido como velocidadede Stribeck (Cunha, 2013).
Uma metodologia para identificacao dos co-eficientes Bv, Bs, Bc e Cs, baseada em realimen-tacao de forca (com corpo de prova) e velocidade,encontra-se em (Armstrong-Helouvry et al., 1994),(Tran et al., 2012) e (Machado, 2004), onde pode-se perceber uma dificuldade em estimar o atritoviscoso para baixas velocidades, pois o fenomenonao-linear de stick-slip torna-se mais evidente.
A seguir, propoe-se estimar estes coeficientesmedindo-se apenas a velocidade do pistao e aspressoes das camaras. A metodologia propostaconsiste em realizar baterias de experimentos emmalha aberta e em malha fechada e armazenar osvalores das pressoes nas camaras em instantes detempo correspondentes a trechos de valores cons-tantes de velocidade, ou seja, para |y| ≈ 0.
De (7), fazendo y = 0, pode-se escrever que
F ∗f = Ff (y∗) = FH − Fg , (10)
sendo y∗ os valores correspondentes a trechos develocidade constante. Alem disso, de (9) e lem-brando que FH − Fg = An(PA − PB) −Mtg, oscoeficientes podem ser obtidos aplicando-se o me-todo de mınimos quadrados a:
Bv y∗ + sgn(y∗)
(Bc +Bse
−|y∗|/Cs
)=
An(PA − PB)−Mtg ,(11)
sendo Cs = 0.01 obtido por inspecao visual na re-giao de baixa velocidade do grafico da Figura 2.A massa Mt = 52 pode ser obtida pelo catalogodo fabricante do cilindro. Definindo-se o vetorΘ =
(B∗v B∗c B∗s p∗
)T, a solucao por mıni-
mos quadrados e dada por ΘT = (ATA)−1AT bsendo
A =
y∗[1] sgn(y∗[1]) sgn(y∗[1])e−|y
∗[1]|/Cs 1y∗[2] sgn(y∗[2]) sgn(y∗[2])e−|y
∗[2]|/Cs 1...
......
...y∗[n] sgn(y∗[n]) sgn(y∗[n])e−|y
∗[n]|/Cs 1
(12)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
861

e
b =
An(PA[1]− PB [1])−Mt gAn(PA[2]− PB [2])−Mt g
...An(PA[n]− PB [n])−Mt g
. (13)
A coluna de “1” na matriz A foi adicionada paracompensar uma descalibracao do sensor de pressaoda camara A (erro de 4 bar), que foi comprovadaexperimentalmente com um manometro calibrado.
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−4000
−3000
−2000
−1000
0
1000
2000
3000
F∗ f[N
]
y∗[ m/s ]
Figura 2: Forca de atrito estimada por meio das pres-soes das camaras para trechos com velo-cidade constante de deslocamento do pis-tao. Linha solida vermelha corresponde aoajuste por mınimos quadrados.
Na Figura 2, pode-se observar (linha solida) oajuste obtido por mınimos quadrados, ja conside-rando a compensacao do sensor descalibrado, queresultou nos seguintes parametros: B∗v = 5008.51,B∗s = 103.36, B∗c = 775.3 e C∗s = 0.01. Estesvalores foram validados ao longo do tempo emdiversos experimentos em malha aberta e malhafechada. A Figura 3, ilustra uns desses experi-mentos. Em azul (linha pontilhada), observa-seo termo An(PA − PB)−Mtg ao longo do tempo.Em verde (linha tracejada), observa-se a forca deatrito ao longo do tempo dada por
Ff (y) = B∗v y + sgn(y)(B∗c +B∗se
−|y|/Cs
),
com os coeficientes obtidos. Note que, o modelopermanece satisfatorio mesmo para velocidade dopistao variavel (|y| 6= 0).
4 Modelo Simplificado para Controle:Integrador
O coeficiente de compressibilidade efetiva dofluido βe pode variar significativamente depen-dendo da temperatura (Sohl and Bobrow, 1999),(Jelali and Kroll, 2003). Entretanto, βe apresentavalores elevados em geral e, portanto, a“constantede tempo” da equacao da dinamica das pressoes(4a) e (4b), ou seja, o coeficiente VA(y)/βe (ouVB(y)/βe) apresenta valores pequenos durante aexcursao do pistao. Em outras palavras, o sis-tema (4a) e (4b) apresenta uma dinamica rapida,
0 0.5 1 1.5 2 2.5 3−4000
−3000
−2000
−1000
0
1000
2000
3000
4000
5000
t[ s ]
F∗ f[N
]
Figura 3: Validacao (ao longo do tempo) do modelo identi-ficado da forca de atrito. Linha pontilhada azulrepresenta o termo An(PA−PB)−Mtg ao longodo tempo enquanto que a linha tracejada verdecorresponde ao ajuste por mınimos quadrados.
independentemente da posicao y. Alem disso, con-siderando o atrito viscoso como sendo o termo do-minante da forca de atrito e que Bv >> Mt, erazoavel considerar que existe uma relacao esta-tica entre o sinal de controle u e a velocidade dedeslocamento do pistao y.
De fato esta relacao existe, como foi verifi-cado em diversos experimentos (malha aberta efechada). A Figura 4, ilustra o comportamentoda velocidade do pistao (y) correspondente a umaentrada (u) senoidal em malha aberta. Portanto,
0 1 2 3 4 5 6−1
−0.5
0
0.5
1
Sin
alde
Con
trol
e [
V ]
0 1 2 3 4 5 6−100
−50
0
50
100
t [ s ]
Vel
ocid
ade
doP
istão [
mm
/s ]
Figura 4: Validacao (ao longo do tempo) do modelo sim-plificado para o sistema: relacao estatica entre aentrada u e a velocidade do pistao y com ganhoaproximadamente igual a −0.07.
da entrada u para a posicao do pistao y, o sistemapode ser modelado por um integrador simples:
y ≈ −0.07u ouY (s)U(s)
≈ −0.07s
.
Para rastreamento de posicao, uma vez que o sis-tema pode ser modelado por um simples integra-dor invariante no tempo, espera-se que um con-trolador proporcional de ganho fixo κp apresenteresultados satisfatorios. De fato, para κp = −100,o desempenho em malha fechada e aceitavel como
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
862
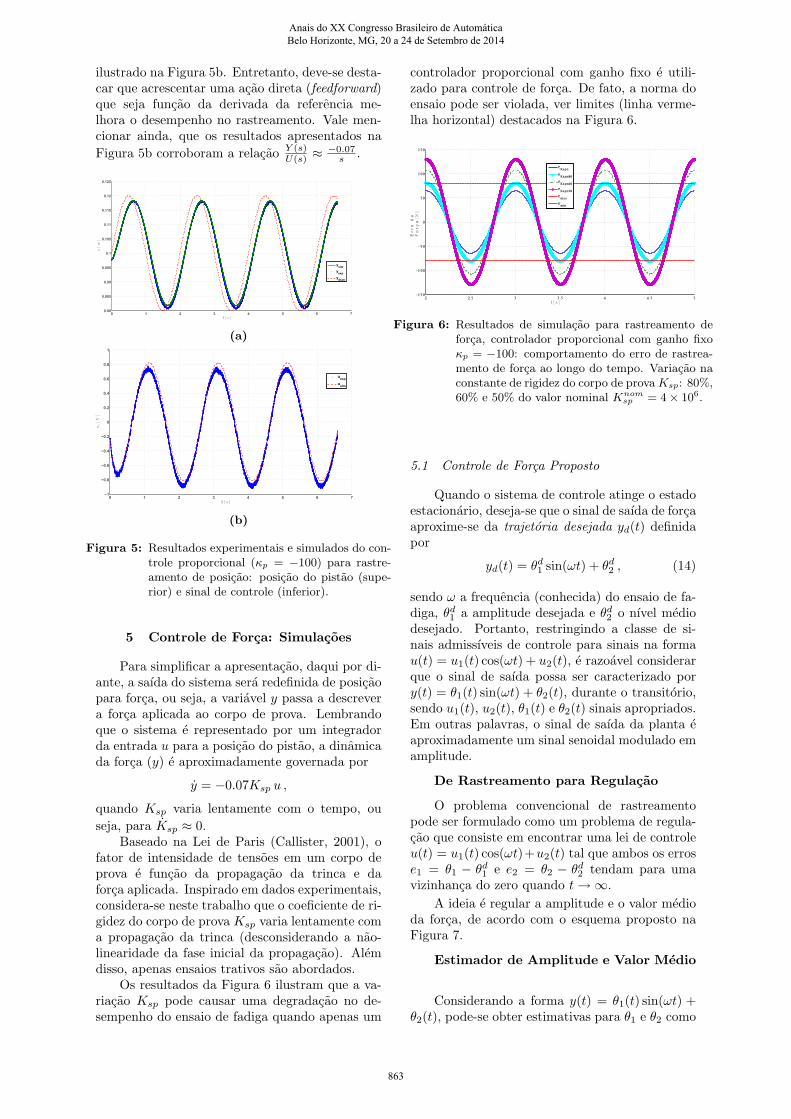
ilustrado na Figura 5b. Entretanto, deve-se desta-car que acrescentar uma acao direta (feedforward)que seja funcao da derivada da referencia me-lhora o desempenho no rastreamento. Vale men-cionar ainda, que os resultados apresentados naFigura 5b corroboram a relacao Y (s)
U(s) ≈−0.07s .
0 1 2 3 4 5 6 70.08
0.085
0.09
0.095
0.1
0.105
0.11
0.115
0.12
0.125
ysim
yexp
ydsim
(a)
0 1 2 3 4 5 6 7−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
uexp
usim
(b)
Figura 5: Resultados experimentais e simulados do con-trole proporcional (κp = −100) para rastre-amento de posicao: posicao do pistao (supe-rior) e sinal de controle (inferior).
5 Controle de Forca: Simulacoes
Para simplificar a apresentacao, daqui por di-ante, a saıda do sistema sera redefinida de posicaopara forca, ou seja, a variavel y passa a descrevera forca aplicada ao corpo de prova. Lembrandoque o sistema e representado por um integradorda entrada u para a posicao do pistao, a dinamicada forca (y) e aproximadamente governada por
y = −0.07Ksp u ,
quando Ksp varia lentamente com o tempo, ouseja, para Ksp ≈ 0.
Baseado na Lei de Paris (Callister, 2001), ofator de intensidade de tensoes em um corpo deprova e funcao da propagacao da trinca e daforca aplicada. Inspirado em dados experimentais,considera-se neste trabalho que o coeficiente de ri-gidez do corpo de prova Ksp varia lentamente coma propagacao da trinca (desconsiderando a nao-linearidade da fase inicial da propagacao). Alemdisso, apenas ensaios trativos sao abordados.
Os resultados da Figura 6 ilustram que a va-riacao Ksp pode causar uma degradacao no de-sempenho do ensaio de fadiga quando apenas um
controlador proporcional com ganho fixo e utili-zado para controle de forca. De fato, a norma doensaio pode ser violada, ver limites (linha verme-lha horizontal) destacados na Figura 6.
2 2.5 3 3.5 4 4.5 5−1 50
−100
−50
0
50
100
150
t [ s ]
Er
ro
d
a
Fo
rç
a[N
]
eKspn
eKspn80
eKspn60
eKspn50
emax
emin
Figura 6: Resultados de simulacao para rastreamento deforca, controlador proporcional com ganho fixoκp = −100: comportamento do erro de rastrea-mento de forca ao longo do tempo. Variacao naconstante de rigidez do corpo de prova Ksp: 80%,60% e 50% do valor nominal Knom
sp = 4× 106.
5.1 Controle de Forca Proposto
Quando o sistema de controle atinge o estadoestacionario, deseja-se que o sinal de saıda de forcaaproxime-se da trajetoria desejada yd(t) definidapor
yd(t) = θd1 sin(ωt) + θd2 , (14)
sendo ω a frequencia (conhecida) do ensaio de fa-diga, θd1 a amplitude desejada e θd2 o nıvel mediodesejado. Portanto, restringindo a classe de si-nais admissıveis de controle para sinais na formau(t) = u1(t) cos(ωt) + u2(t), e razoavel considerarque o sinal de saıda possa ser caracterizado pory(t) = θ1(t) sin(ωt) + θ2(t), durante o transitorio,sendo u1(t), u2(t), θ1(t) e θ2(t) sinais apropriados.Em outras palavras, o sinal de saıda da planta eaproximadamente um sinal senoidal modulado emamplitude.
De Rastreamento para Regulacao
O problema convencional de rastreamentopode ser formulado como um problema de regula-cao que consiste em encontrar uma lei de controleu(t) = u1(t) cos(ωt)+u2(t) tal que ambos os errose1 = θ1 − θd1 e e2 = θ2 − θd2 tendam para umavizinhanca do zero quando t→∞.
A ideia e regular a amplitude e o valor medioda forca, de acordo com o esquema proposto naFigura 7.
Estimador de Amplitude e Valor Medio
Considerando a forma y(t) = θ1(t) sin(ωt) +θ2(t), pode-se obter estimativas para θ1 e θ2 como
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
863
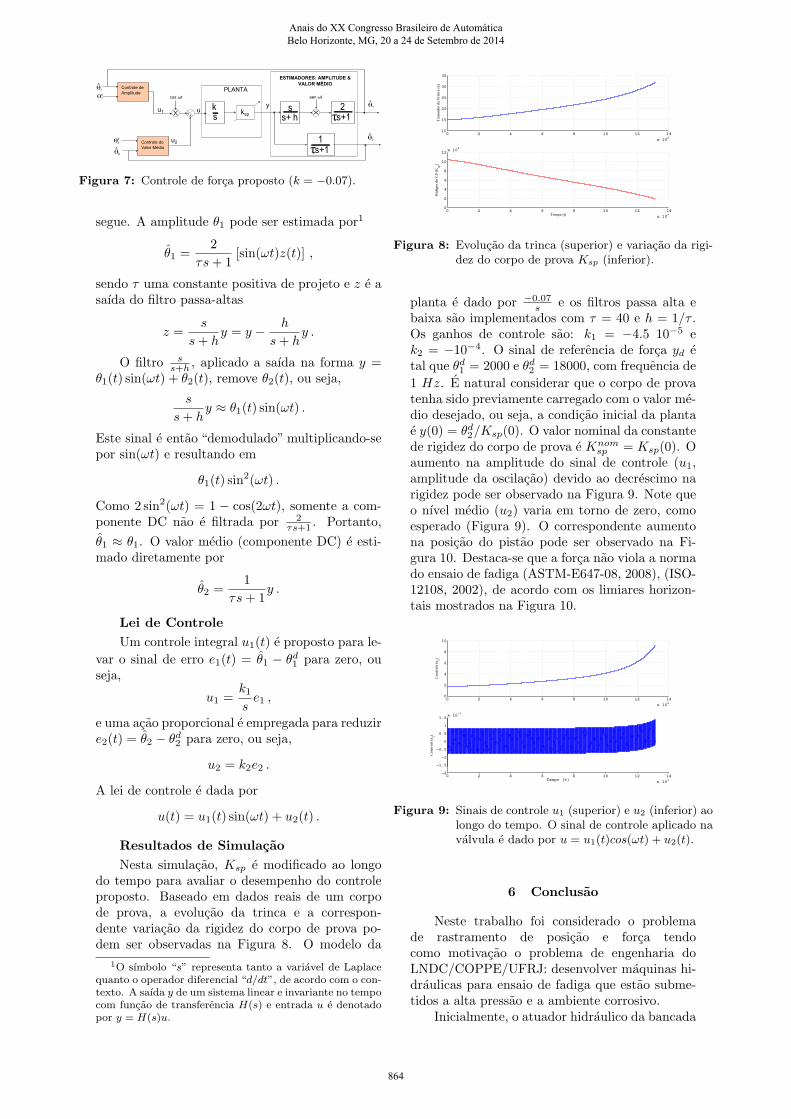
Figura 7: Controle de forca proposto (k = −0.07).
segue. A amplitude θ1 pode ser estimada por1
θ1 =2
τs+ 1[sin(ωt)z(t)] ,
sendo τ uma constante positiva de projeto e z e asaıda do filtro passa-altas
z =s
s+ hy = y − h
s+ hy .
O filtro ss+h , aplicado a saıda na forma y =
θ1(t) sin(ωt) + θ2(t), remove θ2(t), ou seja,
s
s+ hy ≈ θ1(t) sin(ωt) .
Este sinal e entao “demodulado” multiplicando-sepor sin(ωt) e resultando em
θ1(t) sin2(ωt) .
Como 2 sin2(ωt) = 1 − cos(2ωt), somente a com-ponente DC nao e filtrada por 2
τs+1 . Portanto,θ1 ≈ θ1. O valor medio (componente DC) e esti-mado diretamente por
θ2 =1
τs+ 1y .
Lei de ControleUm controle integral u1(t) e proposto para le-
var o sinal de erro e1(t) = θ1 − θd1 para zero, ouseja,
u1 =k1
se1 ,
e uma acao proporcional e empregada para reduzire2(t) = θ2 − θd2 para zero, ou seja,
u2 = k2e2 .
A lei de controle e dada por
u(t) = u1(t) sin(ωt) + u2(t) .
Resultados de SimulacaoNesta simulacao, Ksp e modificado ao longo
do tempo para avaliar o desempenho do controleproposto. Baseado em dados reais de um corpode prova, a evolucao da trinca e a correspon-dente variacao da rigidez do corpo de prova po-dem ser observadas na Figura 8. O modelo da
1O sımbolo “s” representa tanto a variavel de Laplacequanto o operador diferencial “d/dt”, de acordo com o con-texto. A saıda y de um sistema linear e invariante no tempocom funcao de transferencia H(s) e entrada u e denotadopor y = H(s)u.
0 2 4 6 8 10 12 14
x 104
10
15
20
25
30
35
Tam
anho
da
Tri
nca
(a)
0 2 4 6 8 10 12 14
x 104
0
2
4
6
8
10
12x 10
4
Rid
igez
do
CP
(K
sp)
Tempo (t)
Figura 8: Evolucao da trinca (superior) e variacao da rigi-dez do corpo de prova Ksp (inferior).
planta e dado por −0.07s e os filtros passa alta e
baixa sao implementados com τ = 40 e h = 1/τ .Os ganhos de controle sao: k1 = −4.5 10−5 ek2 = −10−4. O sinal de referencia de forca yd etal que θd1 = 2000 e θd2 = 18000, com frequencia de1 Hz. E natural considerar que o corpo de provatenha sido previamente carregado com o valor me-dio desejado, ou seja, a condicao inicial da plantae y(0) = θd2/Ksp(0). O valor nominal da constantede rigidez do corpo de prova e Knom
sp = Ksp(0). Oaumento na amplitude do sinal de controle (u1,amplitude da oscilacao) devido ao decrescimo narigidez pode ser observado na Figura 9. Note queo nıvel medio (u2) varia em torno de zero, comoesperado (Figura 9). O correspondente aumentona posicao do pistao pode ser observado na Fi-gura 10. Destaca-se que a forca nao viola a normado ensaio de fadiga (ASTM-E647-08, 2008), (ISO-12108, 2002), de acordo com os limiares horizon-tais mostrados na Figura 10.
0 2 4 6 8 10 12 14
x 104
0
2
4
6
8
10
Con
trol
e (u
1)
0 2 4 6 8 10 12 14
x 104
−2
−1.5
−1
−0.5
0
0.5
1
1.5x 10
−3
Con
trol
e (u
2)
Tempo (t)
Figura 9: Sinais de controle u1 (superior) e u2 (inferior) aolongo do tempo. O sinal de controle aplicado navalvula e dado por u = u1(t)cos(ωt) + u2(t).
6 Conclusao
Neste trabalho foi considerado o problemade rastramento de posicao e forca tendocomo motivacao o problema de engenharia doLNDC/COPPE/UFRJ: desenvolver maquinas hi-draulicas para ensaio de fadiga que estao subme-tidos a alta pressao e a ambiente corrosivo.
Inicialmente, o atuador hidraulico da bancada
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
864

0 2 4 6 8 10 12 14
x 104
1.5
1.6
1.7
1.8
1.9
2
2.1x 10
4
For
ça (
Fd, F
)
0 2 4 6 8 10 12 14
x 104
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Pos
ição
( y p )
FF
max 2%
Fmax −2%
Fmin 2%
Fmin −2%
Figura 10: Forca aplicada ao corpo de prova (y) ao longo dotempo (superior) e a correspondente posicao dopistao (inferior).
de teste presente no LNDC foi modelado e, em se-guida, um modelo para a forca de atrito foi identi-ficado por mınimos quadrados. Operando em bai-xas frequencias, um modelo simples para o projetode controladores foi obtido e validado. Mostrou-seque e possıvel modelar a relacao entre a entrada dosinal da servo-valvula e o deslocamento do pistaocomo um integrador. Neste caso, controle pro-porcional com ganho fixo apresentou resultadossatisfatorios para o problema de rastreamento deposicao.
Por outro lado, concluiu-se que para o pro-blema de rastreamento de forca em ensaio de fa-diga e necessario utilizar um controlador mais ela-borado devido ao fato de que a rigidez do corpode prova e variante no tempo.
Em ensaios de fadiga, e bem conhecido que arigidez do corpo de prova reduz a medida que atrinca evolui ao longo do tempo. Embora, o corpode prova e o sensor de forca nao estao disponı-veis na bancada, foi possıvel realizar simulacoesnumericas para avaliar o desempenho do esquemade controle proposto. Projetou-se uma lei de con-trole apropriada para a compensacao da variacaoda rigidez do corpo de prova. Aplicando um sinalde controle senoidal modulado, foi possıvel regu-lar a amplitude da forca e o seu nıvel medio demodo a respeitar as exigencias da norma de en-saio de fadiga. A viabilidade da tecnica foi ava-liada mesmo quando a rigidez do corpo de provavaria de forma abrupta. A avaliacao experimentaldo esquema proposto com o corpo de prova estaem andamento.
Agradecimentos
A Coordenacao de Aperfeicoamento de Pes-soal de Nıvel Superior (CAPES) e ao Laborato-rio de Ensaios Nao–Destrutivos, Corrosao e Sol-dagem (COPPE/UFRJ), pelo o apoio financeirodado.
Referencias
Alleyne, A. and Hedrick, J. (1995). Nonlinearadaptive control of active suspensions, IEEETransactions on Control Systems Technology3: 94–101. (DOI: 10.1109/87.370714 ).
Alva, J. G. C. (2008). Controle por Aprendi-zado de Sistemas Servo-Hidraulicos de AltaFrequencia, Dissertacao de mestrado, Ponti-fıcia Universidade Catolica do Rio de Janeiro,PUC-RIO, Rio de Janeiro, RJ, Brasil.
Armstrong-Helouvry, B., Dupont, P. and Canu-das de Wit, C. (1994). A survey of models,analysis tools and compensation methods forthe control of machines with friction, Auto-matica 30(7): 1083–1138.
Assaff, Y. E., Locateli, C. C., de Negri, V. J.,Dilda, V. and Pieri, E. R. (2010). Resul-tados teoricos-experimentais do controle detrajetoria de um atuador hidraulico: Contro-lador pid, backstepping e estrutura variavel,XVIII Congresso Brasileiro de Automatica,SBA, Bonito, MS.
ASTM-E647-08 (2008). ASTM E647-08 – Stan-dard Test Method for Measurement of Fa-tigue Crack Growth Rates, Annual Book ofASTM Standards, ASTM International Stan-dard.
Boulet, B., Daneshmend, L., Hayward, V. andNemri, C. (1992). System identification andmodelling of a high performance hydraulicactuator, EDS, Lecture Notes in Control andInformation Sciences, Springer Verlag.
Callister, W. D. (2001). Fundamentals of materi-als science and engineering : An interactivee-text, 5th edn, Wiley, New York.
Canudas-de-Wit, C., Olsson, H., Astrom, K. andLischinsky, P. (1995). A new model for con-trol of systems with friction, IEEE Transac-tions on Automatic Control 40(3): 419 –425.
Clarke, D. W. and Hinton, C. J. (1997). Adaptivecontrol of materials-testing machines, in E. S.Ltda. (ed.), Automatica, Vol. 33, pp. 1119–1131.
Cullen, W. H. (1985). Automated test methodsfor fracture and fatigue crack growth a sym-posium sponsored by ASTM Committees E-9 on Fatigue and E-24 on Fracture Testing,Pittsburg, PA, 7-8 Nov. 1983, ASTM, Phila-delphia, PA.
Cunha, M. A. B. (2001). Controle em Cascata deum Atuador Hidraulico: Contribuicoes Teo-ricas e Experimentais, Tese de doutorado,
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
865
Programa de Pos-Graduacao em Engenha-ria Eletrica da Universidade Federal de SantaCatarina, Florianopolis, SC, Brasil.
Cunha, T. B. (2013). Hydraulic Compliance Con-trol of the Quadruped Robot HyQ, Phd, Uni-versity of Genoa. Istituto Italiano di Tecno-logia (IIT), Genova, Italy.
Furst, F. L. (2001). Sistematizacao do projeto pre-liminar de circuitos hidraulicos com controlede posicao, Master’s thesis, Programa de Pos-Graduacao em Engenharia Mecanica. Univer-sidade Federal de Santa Catarina.
ISO-12108 (2002). ISO 12108 – Metallic Materi-als – Fatigue Testing – Fatigue crack growthmethod, Tecnical Committee ISO/TC 164Mechanical testing of metals, SubcommitteeSC 5, Fatigue testing., 1 edn, InternationalOrganization for Standardization, Geneva,Switzerland.
Jelali, M. and Kroll, A. (2003). Hydraulic Servo-systems: modelling, identification, and con-trol, Springer, London New York. (DOI:10.1007/978-1-4471-0099-7).
Kim, H. M., Park, S. H., Song, J. H. and Kim, J. S.(2010). Robust position control of electro-hydraulic actuator systems using the adap-tive back-stepping control scheme, Procee-dings of the Institution of Mechanical Engi-neers, Part I: Journal of Systems and ControlEngineering 224(6): 737–746.
Machado, C. L. D. (2004). Compensacao de atritoem atuadores hidraulicos utilizando redesneurais, Dissertacao (mestrado em engenha-ria mecanica), Programa de Pos-Graduacaoem Engenharia Mecancia, Universidade Fe-deral de Santa Catarina, Florianopolis, SC,Brasil.
Merritt, H. E. (1967). Hydraulic Control Systems,John Wiley & Sons, Inc., New York, USA.
Pereira-Dias, D., Costa, R. R. and Peixoto, A. J.(2013). Control of hydraulic actuated fati-gue testing machines – a review, 22nd Inter-nation Congress of Mechanical Engineering(COBEM2013), ABCM, Ribeirao Preto, SP,pp. 9370–9381.
Pereira, P. I. I. (2006). Analise teorico-experimental de cocontrolador para sistemashidraulicos, Dissertacao de mestrado, Pro-grama de Pos-Graduacao em Engenharia Me-canica, UFSC, Florianopolis, SC, Brasil.
Sohl, G. A. and Bobrow, J. E. (1999). Ex-periments and simulations on the nonlinearcontrol of a hydraulic servosystem, IEEETransactions on Control Systems Technology7(2): 238–247. (DOI: 10.1109/87.748150).
Sanchez, E. C. M., Alva, J. G. C., Meggiolaro,M. A., de Castro, J. T. P. and Topper, T. H.(2012). Learning control and neuro-fuzzy le-arning control to increase the frequency of fa-tigue tests, ABCM Symposium Series In Me-chatronics, Vol. 5, ABCM, Rio de Janeiro,RJ, Brasil, pp. pp. 231–244.
Tran, X. B., Hafizah, N. and Yanada, H.(2012). Modeling of dynamic fric-tion behaviors of hydraulic cylinders,Mechatronics 22(1): 65 – 75. (DOI:10.1016/j.mechatronics.2011.11.009).
Valdiero, A. C. (2012). Modelagem matematica deRobos Hidraulicos, Editora Unijuı.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
866





























