Embed Size (px)
Citation preview
8/19/2019 Modelagem Mecânica de Um Sistema de Suspensão Com o Método Quarter
http://slidepdf.com/reader/full/modelagem-mecanica-de-um-sistema-de-suspensao-com-o-metodo-quarter 1/6
Modelagem mecânica de um sistema de suspensão com o método
Quarter-Car
Felinto Rabelo Fonseca Neto. Cód.: 0912116
Universidade Estadual do Maranhão, São Luís, Maranhão, Brasil.
Resumo. A modelagem mecânica é a parte fundamental para se entender bem o
comportamento de um sistema, neste artigo é abordado um exemplo na prática de uma
modelagem para projeto de suspensão amplamente utilizado nas indústrias como pontapé
inicial e já muito estudado nos projetos científicos.
Palavras-chave: Quarter-Car, Modelagem Mecânica, Suspensão, Equações de movimento,
Função de Transferência, Massa, Rigidez, Amortecimento.
Introdução
A finalidade da modelagem
matemática é representar todos os aspectos
importantes do sistema com o propósito de
obter as equações matemáticas (ou
analíticas) que governam o comportamento
do sistema. O modelo matemático deve
incluir detalhes suficientes para conseguir
descrever o sistema em termos de equações
sem torna-lo complexo (S . Rao, 2008).
Assim, neste trabalho será abordado
uma modelagem simplificada ao máximo,
porém com representação adequada para
descrever o correto comportamento do
sistema.
O início
Para começar-se a modelagem de
um sistema é preciso entender as
características do mesmo, dessa forma, a
suspensão de um carro é dotada de
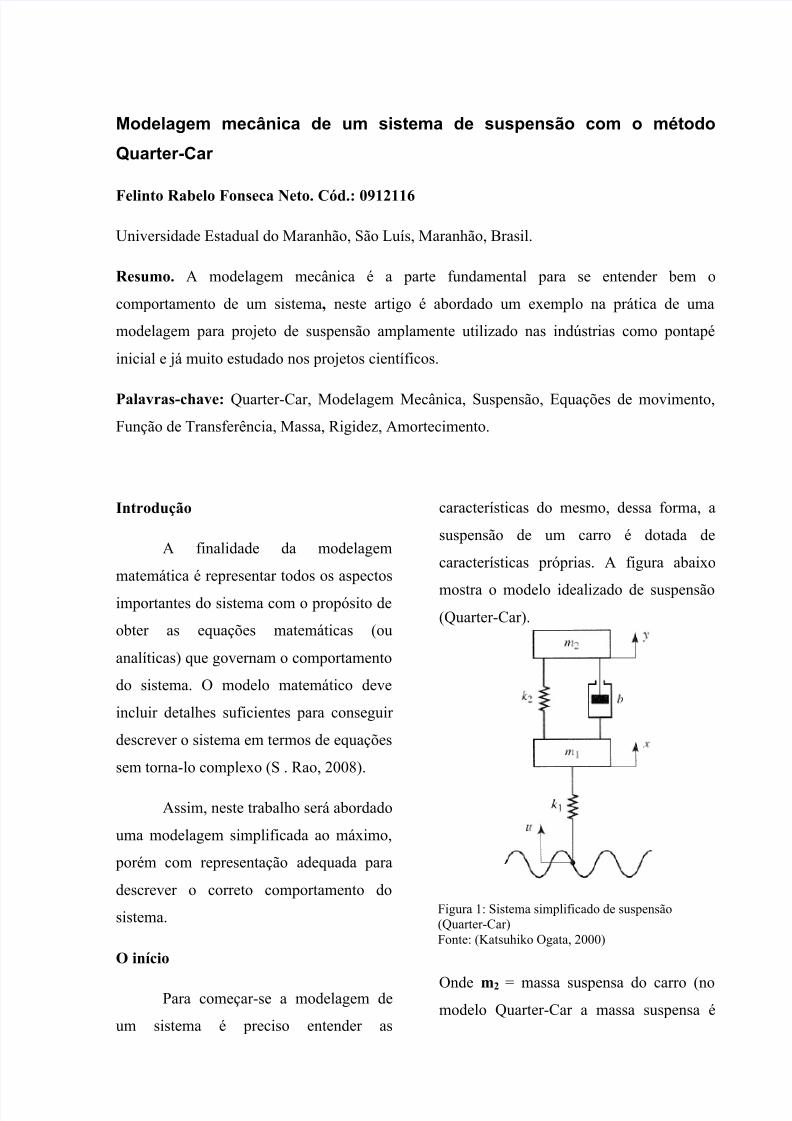
características próprias. A figura abaixo
mostra o modelo idealizado de suspensão
(Quarter-Car).
Onde m2 = massa suspensa do carro (no
modelo Quarter-Car a massa suspensa é
Figura 1: Sistema simplificado de suspensão
(Quarter-Car)
Fonte: (Katsuhiko Ogata, 2000)
8/19/2019 Modelagem Mecânica de Um Sistema de Suspensão Com o Método Quarter
http://slidepdf.com/reader/full/modelagem-mecanica-de-um-sistema-de-suspensao-com-o-metodo-quarter 2/6
tida como um quarto da massa do carro
menos a massa de uma roda e metade dos
elementos da suspensão); m1 = massa não
suspensa (massa das rodas e metade dos
elementos da suspensão); y =
deslocamento da massa suspensa em
relação ao solo; x = deslocamento da
massa não suspensa em relação ao solo; u
= deslocamento do solo; k 2 = rigidez da
mola da suspensão (idealizada em cima da
roda); k 1 = rigidez do pneu e b =
amortecimento do amortecedor da
suspensão (idealizada em cima da roda).
O modelo representado pelo
Quarter-Car é um modelo idealizado, pois
não leva em consideração parâmetros
importantes para a total compreensão do
seu comportamento como o amortecimento
das buchas da suspensão, o amortecimento
por histerese do pneu e até mesmo o
amortecimento intrínseco à mola.
Entretanto alguns estudiosos, na tentativa
de chegar a uma idealização que se
aproxime do sistema criticamente
amortecido (necessário para que haja o
maior tempo de contato do pneu com o
solo) utilizam uma fração do
amortecimento crítico, a chamada taxa de
amortecimento ou fator de amortecimento
ζ (zeta) e assim idealizam os
amortecimentos embutidos.
Achando as equações do sistema e a
função de transferência.
O sistema Quarter-Car descreve um
sistema vibracional com 2 graus de
liberdade que está sobre condições
forçantes gerais (irregularidade da pista).
Dessa forma, para se começar a
modelagem é preciso entender ou supor o
que acontecerá com o sistema quando sob
excitações.
Quando se olha a figura do Quarter-
Car algumas coisas são supostas, por
exemplo: o deslocamento y é maior que o
deslocamento x, ou seja, o deslocamento
da massa suspensa é maior que o da massa
não suspensa, dessa forma tem-se que o
deslocamento sofrido pela mola k 2 será (y
– x). Semelhantemente pode-se dizer que o
deslocamento provindo do chão será maior
que o deslocamento da massa não suspensa
(m1), ou seja, o deslocamento sofrido pela
mola será (u – x).
Sabendo das suposições anteriores
pode-se dizer então que quando o sistema é
excitado, a massa suspensa (m2) puxa a
massa (m1) e consequentemente também é puxada. De igual modo, como u > x, a
massa não suspensa é empurrada pelo
deslocamento “u”. Assim, a mola k 2 está
sob tensão e a mola k 1 sob compressão.
Por isso, quando entramos com as
suposições no diagrama de corpo livre do
sistema Quarter-Car ele se torna como na
figura a seguir.

8/19/2019 Modelagem Mecânica de Um Sistema de Suspensão Com o Método Quarter
http://slidepdf.com/reader/full/modelagem-mecanica-de-um-sistema-de-suspensao-com-o-metodo-quarter 3/6
Figura 2: Diagrama de corpo livre, Quarter-Car
Fonte: Própria
Onde, y’ , y’’ , x’ e x’’ são as derivadas de
primeira e segunda ordem dos
deslocamentos y e x.
Concluindo a fase de suposições
iniciais pode-se então aplicar a segunda lei
de Newton para se achar as equações de
movimento do sistema, que neste caso
específico, são duas. Assim, temos que:
Para m1,
m1.x’’ = ΣFy1 = Fk2 + Fk1 + F b
m1.x’’ = k 2.(y – x) + k 1.(u – x) + b.(y’ – x’)
m1.x’’ = k 2.y – k 2.x + k 1.u – k 1.x + b.y’ –
b.x’
m1.x’’ = k 2.y + k 1.u – x.(k 2 + k 1) + b.y’ –
b.x’
assim, a primeira equação é:
m1.x’’+ x.(k 2 + k 1) + b.x’ – k 2.y – k 1.u – b.y’ = 0
Para m2,
m2.y’’ = ΣFy2 = Fk2 + F b
m2.y’’ = – k 2.(y – x) – b.(y’– x’)
m2.y’’ = – k 2.y + k 2.x – b.y’ + b.x’
assim, a segunda equação é:
m2.y’’ – b.x’ + b.y’ – k 2.x + k 2.y = 0
O difícil em lidar com estas
equações diretamente é que levaria muito
tempo para resolvê-las de forma direta,
pois primeiramente seria preciso o
encontro da equação característica através
da implantação de uma solução particular,
daí então encontrar as raízes das equações,
que neste caso são quatro devido o fato de
que cada equação dá duas raízes. A partir
deste ponto então, achar os modos de
vibração, as condições iniciais e então
encontrar as soluções das equações
(equações que representam o
comportamento das massas em relação ao
tempo).
Por isso, então, trabalhar-se-á com
transformada de Laplace.
Têm-se, reorganizando as duas equações
do movimento:
m1.x’’+ b.x’ + x.(k 2 + k 1) = – b.y’ – k 2.y –
k 1.u
m2.y’’ + b.y’ + k 2.y = b.x’ + k 2.x

8/19/2019 Modelagem Mecânica de Um Sistema de Suspensão Com o Método Quarter
http://slidepdf.com/reader/full/modelagem-mecanica-de-um-sistema-de-suspensao-com-o-metodo-quarter 4/6
Aplicando-se a transformada de Laplace
para as equações, resulta:
[(m1.s
2
+b.s + (k 1 + k 2)].X(s) = (b.s +k 2).Y(s) + k 1.U(s)
[m2.s2 + b.s + k 2].Y(s) = (b.s + k 2).X(s)
Resolvendo-se estas duas equações para se
encontrar as funções de transferência da
massa suspensa e da não suspensa têm-se,
[Y(s)/U(s)] = (k 1.b.s + k 1.k 2)/{m1.m2.s4 +
(m1 + m2).b.s3 + [k 1.m2 + (m1 + m2).k 2].s2
+ k 1.b.s + k 1.k 2}
e
[X(s)/U(s)] = (k 1.m2.s2 + k 1.b.s + k 1.k 2)/
{m1.m2.s4 + (m1 + m2).b.s3 + [k 1.m2 + (m1
+ m2).k 2].s2 + k 1.b.s + k 1.k 2} .
Aplicando em CAE
Estas duas equações de
transferência agora podem mostrar o
comportamento das duas massas, basta
para isso saberem-se as constantes
utilizadas. Dessa forma, adotando então
constantes utilizadas para se fazer o
cálculo da uma suspensão idealizada pode-
se através do software MATLAB
visualizar-se o curso das massas em
relação ao tempo.
A seguir estão os códigos utilizados
em MATLAB para execução dos gráficos.
%% Quarter-Car
m1 = 20; % em kg massa nao
suspensa m2 = 42.75; % em kg massa suspensa k1 = 41302.55; % dez vezes k2
(Margolis et al, 2001).
k2 = 4130.255; %em N/m % Usar-se-á taxas de amortecimento
(zeta) para cálculo comparativo
entre massas, % assim achando-se também o
coeficiente de amortecimento. b1 = 2*(1)*sqrt(k2*m2); % 1 para
sistema criticamente amortecido; b2 = 2*(1.6)*sqrt(k2*m2); % 1.6
para sistema super-amortecido; b3 = 2*(0.6)*sqrt(k2*m2); % 0.6
para sistema sub-amortecido; %% Calcula-se agora as matrizes
numeradores e denominadores. % para função de tranferência da
massa suspensa num1 = [k1*b1 k1*k2]; % para
massa suspensa (criticamente
amortecido) den1 = [m1*m2 (m1+m2)*b1
(k1*m2+(m1+m2)*k2) k1*b1 k1*k2]; num2 = [k1*b2 k1*k2]; % para
massa suspensa (super-amortecido) den2 = [m1*m2 (m1+m2)*b2
(k1*m2+(m1+m2)*k2) k1*b2 k1*k2]; num3 = [k1*b3 k1*k2]; % para
massa suspensa (sub-amortecido) den3 = [m1*m2 (m1+m2)*b3
(k1*m2+(m1+m2)*k2) k1*b3 k1*k2]; % para função de transferência da
massa não suspensa num11 = [k1*m2 k1*b1 k1*k2]; %
para massa não-suspensa
(criticamente amortecido) den11 = [m1*m2 (m1+m2)*b1
(k1*m2+(m1+m2)*k2) k1*b1 k1*k2]; num22 = [k1*m2 k1*b2 k1*k2]; %
para massa não-suspensa (super-
amortecido) den22 = [m1*m2 (m1+m2)*b2
(k1*m2+(m1+m2)*k2) k1*b2 k1*k2]; num33 = [k1*m2 k1*b3 k1*k2]; %
para massa não-suspensa (sub-
amortecido) den33 = [m1*m2 (m1+m2)*b3
(k1*m2+(m1+m2)*k2) k1*b3 k1*k2]; %% Gráfico t = 0:0.001:1; %tempo g1 = impulse(num1,den1,t); g2 = impulse(num2,den2,t); g3 = impulse(num3,den3,t); g4 = impulse(num11,den11,t); g5 = impulse(num22,den22,t); g6 = impulse(num33,den33,t); g7 = step(num1,den1,t); g8 = step(num2,den2,t);
8/19/2019 Modelagem Mecânica de Um Sistema de Suspensão Com o Método Quarter
http://slidepdf.com/reader/full/modelagem-mecanica-de-um-sistema-de-suspensao-com-o-metodo-quarter 5/6
g9 = step(num3,den3,t); g10 = step(num11,den11,t); g11 = step(num22,den22,t); g12 = step(num33,den33,t); plot(t,g1,'red',t,g4); %Comparação
entre massa suspensa e nãosuspensa para impulso -
criticamente amortecido plot(t,g2,'red',t,g5); %Comparação
entre massa suspensa e não
suspensa para impulso - super-
amortecido plot(t,g3,'red',t,g6);%Comparação
entre massa suspensa e não
suspensa para impulso - sub-
amortecido plot(t,g7,'red',t,g10);
%Comparação entre massa suspensa e
não suspensa para degrau -criticamente amortecido plot(t,g8,'red',t,g11);
%Comparação entre massa suspensa e
não suspensa para degrau - super-
amortecido plot(t,g9,'red',t,g12);%Comparação
entre massa suspensa e não
suspensa para degrau - sub-
amortecido plot(t,g1,'red',t,g2,'g',t,g3,'k')
; plot(t,g4,'red',t,g5,'g',t,g6,'k')
; plot(t,g7,'red',t,g8,'g',t,g9,'k'); plot(t,g10,'red',t,g11,'g',t,g12,'
k');
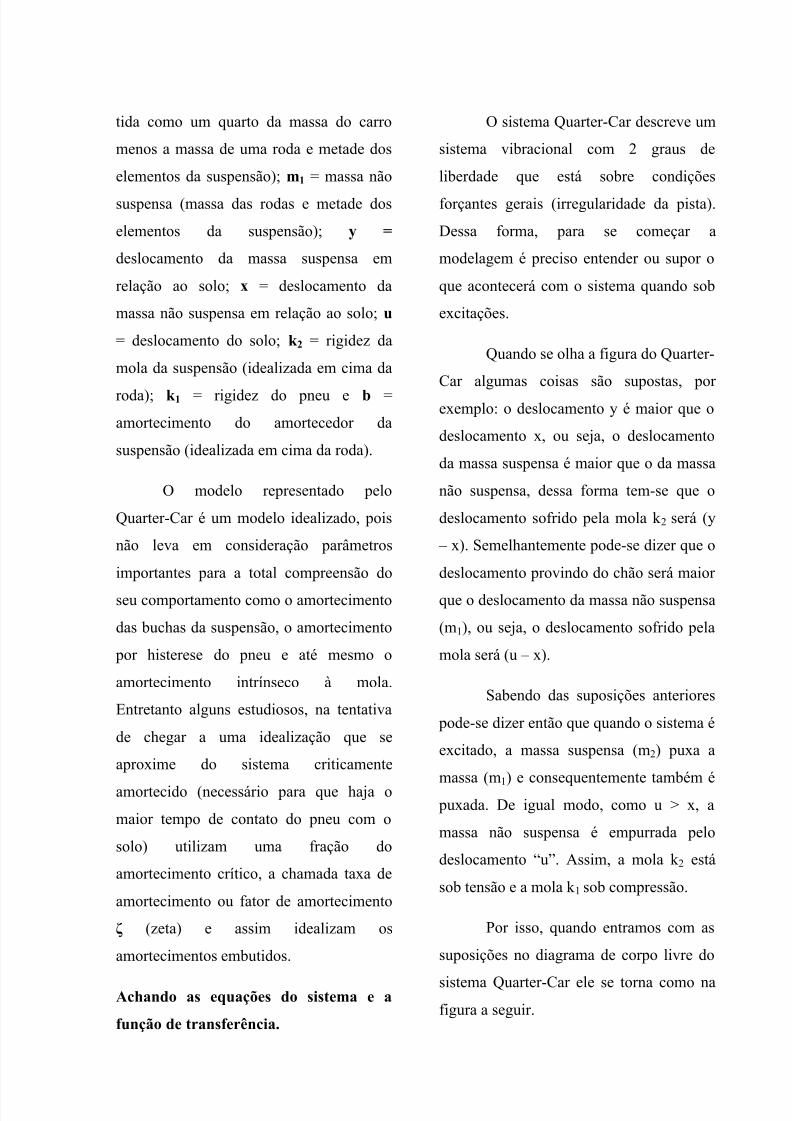
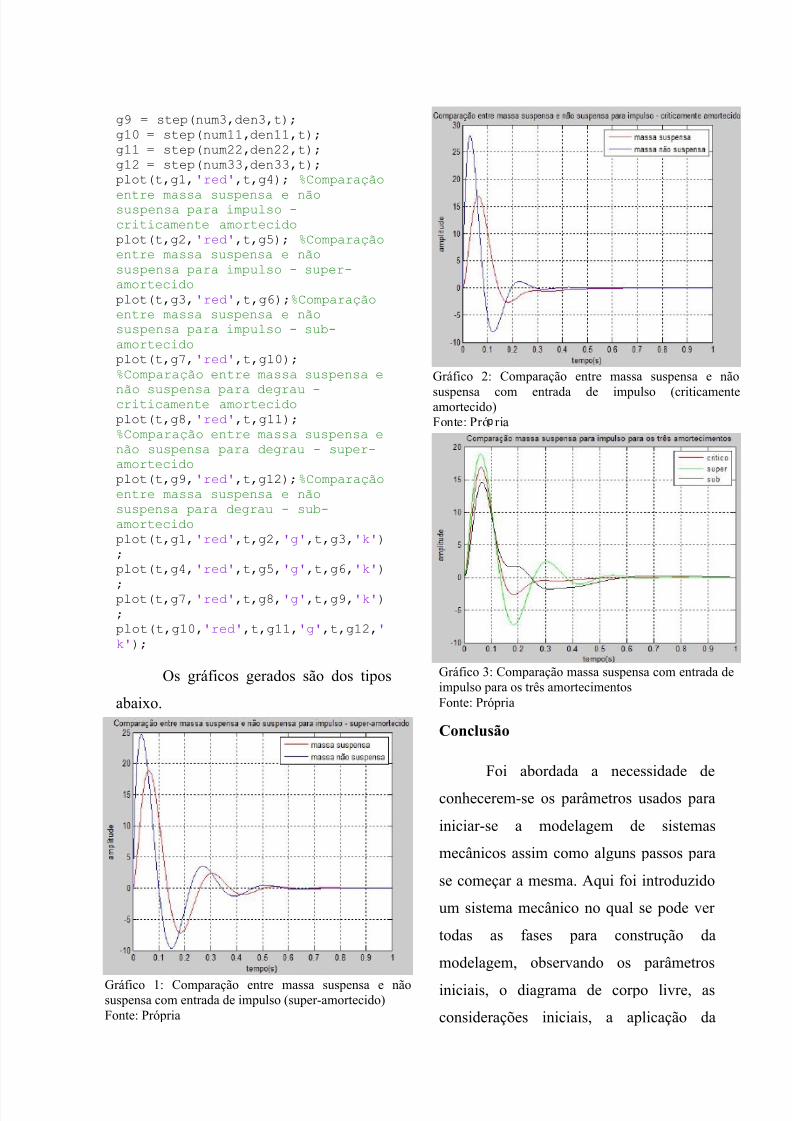
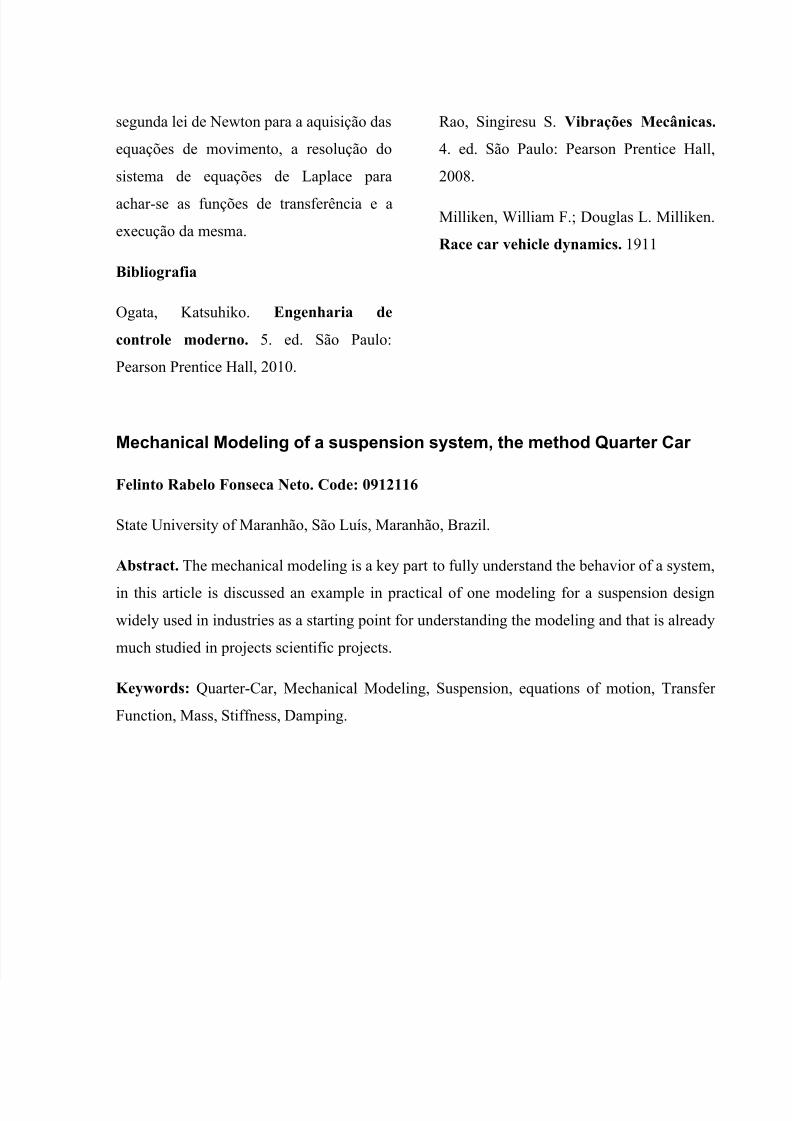
Os gráficos gerados são dos tipos
abaixo.
Conclusão
Foi abordada a necessidade de
conhecerem-se os parâmetros usados para
iniciar-se a modelagem de sistemas
mecânicos assim como alguns passos para
se começar a mesma. Aqui foi introduzido
um sistema mecânico no qual se pode ver
todas as fases para construção da
modelagem, observando os parâmetros
iniciais, o diagrama de corpo livre, as
considerações iniciais, a aplicação da
Gráfico 1: Comparação entre massa suspensa e nãosuspensa com entrada de impulso (super-amortecido)
Fonte: Própria
Gráfico 2: Comparação entre massa suspensa e não
suspensa com entrada de impulso (criticamenteamortecido)
Fonte: Pró ria
Gráfico 3: Comparação massa suspensa com entrada de
impulso para os três amortecimentos
Fonte: Própria
8/19/2019 Modelagem Mecânica de Um Sistema de Suspensão Com o Método Quarter
http://slidepdf.com/reader/full/modelagem-mecanica-de-um-sistema-de-suspensao-com-o-metodo-quarter 6/6
segunda lei de Newton para a aquisição das
equações de movimento, a resolução do
sistema de equações de Laplace para
achar-se as funções de transferência e a
execução da mesma.
Bibliografia
Ogata, Katsuhiko. Engenharia de
controle moderno. 5. ed. São Paulo:
Pearson Prentice Hall, 2010.
Rao, Singiresu S. Vibrações Mecânicas.
4. ed. São Paulo: Pearson Prentice Hall,
2008.
Milliken, William F.; Douglas L. Milliken.
Race car vehicle dynamics. 1911
Mechanical Modeling of a suspension system, the method Quarter Car
Felinto Rabelo Fonseca Neto. Code: 0912116
State University of Maranhão, São Luís, Maranhão, Brazil.
Abstract. The mechanical modeling is a key part to fully understand the behavior of a system,
in this article is discussed an example in practical of one modeling for a suspension design
widely used in industries as a starting point for understanding the modeling and that is already
much studied in projects scientific projects.
Keywords: Quarter-Car, Mechanical Modeling, Suspension, equations of motion, Transfer
Function, Mass, Stiffness, Damping.





























