Embed Size (px)
Citation preview

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 1/29
Processos em Engenharia:
Modelagem deSistemas Eletromecânicos
Prof. Daniel Coutinho
Departamento de Automacao e Sistemas – DAS
Universidade Federal de Santa Catarina – UFSC
DAS 5101 - Aula 6 – p.1/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 2/29
Sumário
• Introdução
• Modelagem de Sistemas Elétricos
• Modelagem de Sistemas Mecânicos
• Modelagem do Motor DC
• Exemplos e Exercícios
DAS 5101 - Aula 6 – p.2/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 3/29
Introdução
• Os sistemas elétricos constituem um bom exemplo de
aplicação para os quais a região de validade das hipóteses
de linearidade é relativamente grande.
• A modelagem de sistemas elétricos não apresenta maiores
dificuldades, na medida em que uma convenção de sinais
para as correntes e tensões seja respeitada.
• Os modelos são obtidos utilizando as leis básicas de
circuitos elétricos como as Leis de Kirchhoff para tensão e
corrente.
DAS 5101 - Aula 6 – p.3/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 4/29
Elementos Básicos - I
• Elementos Passivos:
• Relação tensão-corrente
u(t) = Ri(t) , u(t) = Ldi(t)
dt , i(t) = C
du(t)
dt
DAS 5101 - Aula 6 – p.4/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 5/29
Elementos Básicos - II
• Fontes de tensão e corrente:
• ri : resistência interna. Idealmente para fonte de tensão
ri → 0 e para fonte de corrente ri →∞.
• Fontes dependentes: quando a tensão ou corrente
dependem de outras tensões e correntes no circuito
(associados a elementos ativos).
DAS 5101 - Aula 6 – p.5/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 6/29
Leis Básicas de Circuitos
• Leis de Kirchoff: malhas e nós.
• Convenção de sinais para tensão e corrente:
DAS 5101 - Aula 6 – p.6/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 7/29
Lei das Malhas
• O somatório das tensões em uma malha fechada é nulo.
• Convenção: contar uma tensão como positiva se a sua
flecha é na mesma direção do percurso da malha. Contarnegativa no caso contrário.
DAS 5101 - Aula 6 – p.7/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 8/29
Lei dos Nós
• A soma das correntes num nó é nula.
•
Convenção: as correntes são contadas positivas na direçãodo nó e negativas na direção contrária.
DAS 5101 - Aula 6 – p.8/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 9/29
Circuito RL Série
• Equacionamento:
u2(t) = L di(t)dt
, u1(t)−Ri(t)− L di(t)dt
= 0
I (s) =
1
Ls + R U 1(s) ⇒ U 2(s) =
Ls
Ls + R U 1(s)
DAS 5101 - Aula 6 – p.9/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 10/29
Circuito RC Série
• Equacionamento:
i(t) = C du2(t)dt , u1(t)−RC du2(t)dt − u2 = 0
U 2(s) = 1
RCs + 1
U 1(s) , I (s) = Cs
RCs + 1
U 1(s)
DAS 5101 - Aula 6 – p.10/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 11/29
Exercício
• Obter a relação G(s) = I 2(s)/U 1(s) para o circuito abaixo:
DAS 5101 - Aula 6 – p.11/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 12/29
Sistemas Mecânicos - I
• Os movimentos elementares realizados pelos sistemas
mecânicos são translações (movimentos ao longo de um
eixo) ou rotações (movimentos ao redor de um eixo).
• Qualquer outro movimento pode-se decompor sempre em
translações e rotações.
• A obtenção de modelos matemáticos pode ser realizada
utilizando as leis básicas de Newton (balanceamento deforças) ou utilizando balanceamento de energia (equações
de Lagrange).
DAS 5101 - Aula 6 – p.12/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 13/29
Sistemas Mecânicos - II
• Elementos básicos da translação:
DAS 5101 - Aula 6 – p.13/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 14/29
Sistemas Mecânicos - III
• As forças de atrito são altamente não lineares.
• Para simplificar o modelo matemático, separa-se a força de
atrito em duas componentes:
1. Atrito seco (ou estático): é uma força contrária a
colocação de um corpo rígido em movimento.
2. Atrito dinâmico: para um corpo em movimento, a força
de atrito aumenta linearmente com a velocidade.
• A força de atrito seco é muito maior do que a força de atrito
dinâmico logo que o corpo entra em movimento.
•
O atrito dinâmico é oposto ao movimento e nulo quandox(t) = 0.
DAS 5101 - Aula 6 – p.14/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 15/29
Sistemas Mecânicos - IV
• Lei fundamental da mec anica (Lei de Newton):
• Trata-se de uma relação vetorial.
• A direção da aceleração é a mesma da resultante das forças
aplicadas.
• Sendo a massa maior que zero, deve-se adotar uma
convenção de sinais coerente com M > 0.
DAS 5101 - Aula 6 – p.15/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 16/29
Sistemas Mecânicos - V
• Convenc ˜ ao de sinais e procedimentos de modelagem:
Considerar o sistema em repouso como a origem dos
deslocamentos (molas no estado neutro: nem esticadas,
nem comprimidas, ou na posição de equilíbrio).
Contar os graus de liberdade (encontrar e contar todos os
pontos que podem se movimentar livremente).
Definir um sentido positivo para os deslocamentos e as
forças.
DAS 5101 - Aula 6 – p.16/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 17/29
Sistemas Mecânicos - VI
• Convenc ˜ ao de sinais e procedimentos de modelagem:
(continuação)
Para cada ponto material livre, aplicar a lei fundamental da
mecânica (considerando M eventualmente igual a zero para
os pontos de massa nula ou desprezível).
• Convenc ˜ ao: as forças que se opõem ao movimento
(elasticidade, atritos) devem ser contadas sempre
negativamente e as que provocam o movimento devem ser
consideradas positivas.
DAS 5101 - Aula 6 – p.17/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 18/29
Exemplo 1
• Sistema Massa-Mola:
• Equacionamento:
forças = M d2x(t)dt2
F (t)− kx(t) = M d2x(t)
dt2 ⇒ M
d2x(t)
dt2 + kx(t) = F (t)
DAS 5101 - Aula 6 – p.18/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 19/29
Exemplo 2
• Sistema Massa-Mola-Amortecedor: (paralelo)
• Equacionamento:
F (t)−kx(t)−f dx(t)
dt = M
d2x(t)
dt2 ⇒ M
d2x(t)
dt2 +f
dx(t)
dt +kx(t) = F (t)
DAS 5101 - Aula 6 – p.19/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 20/29
Exemplo 3
• Massa-mola-amortecedor: (serie)
• Deslocamento x: F (t)− f
dx(t)dt − dy(t)dt
= M d2
x(t)dt2 .
• Deslocamento y: f
dx(t)dt −
dy(t)dt
− ky(t) = 0.
→ Obtenha a função de transferência X (s)/F (s).
DAS 5101 - Aula 6 – p.20/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 21/29
Rotação - I
• Elementos Basicos da Rotac ˜ ao:
DAS 5101 - Aula 6 – p.21/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 22/29
Rotação - II
• O torque de atrito é não linear em relação a θ(t) e pode ser
aproximado por:
1. O torque de atrito seco (estático) é o torque necessário
para que o corpo comece a girar.
2. O torque de atrito dinâmico é proporcional ao aumentoda velocidade angular θ(t).
• O torque de atrito é sempre oposto ao movimento angular e
existe somente quando se aplica um torque que tende a
provocar movimento.
DAS 5101 - Aula 6 – p.22/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 23/29
Rotação - III
• Lei fundamental da mec anica:
• Convenc ˜ ao de sinais e procedimento de modelagem:
Considerar o sistema em repouso como a origem dos
deslocamentos angulares (molas no estado neutro: nem
esticadas, nem comprimidas).
DAS 5101 - Aula 6 – p.23/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 24/29
Rotação - IV
• Convenc ˜ ao de sinais e procedimento de modelagem:
(continuação)
Determinar os graus de liberdade (encontrar e contar todos
os pontos que podem se movimentar livremente).
Definir um sentido positivo para os deslocamentos e os
torques.
Para cada ponto material livre, aplicar a lei fundamental da
mecânica (com J eventualmente igual a zero para os pontos
de inércia nula ou desprezível).
DAS 5101 - Aula 6 – p.24/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 25/29
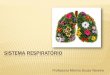
Motor DC - I
• A seguir, apresenta-se o modelo completo do motor DC.
•
Para tal, considera-se um motor de corrente contínua comexcitação separada (enrolamento de campo fixo ou ímã
permanente).
• A tensão de alimentação da armadura (bobinado do rotor)
será representada pela variável v(t).
• A carga mecânica aplicada ao motor é constituída pelo
momento de inércia J c e um atrito viscoso f c (supõe-se que
ela é conectada diretamente ao eixo do motor).
DAS 5101 - Aula 6 – p.25/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 26/29
Motor DC - II
• Do ponto de vista mecânico: o torque eletromagnético
gerado pelo motor T m deve acionar o momento de inércia
total
J t = J m + J c
onde J m é a inércia do rotor.
• Para o motor entrar em movimento é necessário vencer as
forças de atrito do motor f m e aqueles da carga f c.
•
Seja, então, f t o coeficiente total ou global de atrito, dadopor f t = f m + f c.
• Além dos torques acima, pode existir um torque resistente
adicional representado por T r.
DAS 5101 - Aula 6 – p.26/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 27/29
Motor DC - III
• Do ponto de vista elétrico, o circuito da armadura
(induzido) é um receptor que apresenta uma f.c.e.m., E (t),
proporcional ao fluxo e à velocidade de rotação Ω(t).
• O circuito da armadura apresenta uma resistência r
pequena e uma autoindutância l.
• Em geral, esse sistema eletromecânico apresenta duas
constantes de tempo bastante distintas: elétrica τ e = l/r e
mecânica τ m = J t/f t.
• Quando τ m >> τ e, pode-se desprezar a autoindutância l
levando a um sistema de primeira ordem.
DAS 5101 - Aula 6 – p.27/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 28/29
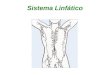
Motor DC - IV
• Modelagem e equacionamento:
DAS 5101 - Aula 6 – p.28/29

7/23/2019 Modelagem Sist Eletromecanicos
http://slidepdf.com/reader/full/modelagem-sist-eletromecanicos 29/29
Exercício
1. Aplique a transformada de Laplace e obtenha uma
representação por diagrama em blocos para o motor,explicitando os sinais V (s), E (s), Ω(s), I (s) e T m(s).
2. No diagrama acima, como o T r é modelado ?
3. Obtenha a função de transferência relacionando Ω(s)/V (s).
DAS 5101 - Aula 6 – p.29/29