Embed Size (px)
Citation preview

MARCELO MENEZES DA SILVA
PREDIÇÃO DE ROP UTILIZANDO REDES NEURAIS ARTIFICIAIS NO CAMPO DE
JUBARTE (PRÉ-SAL, BRASIL)
Monografia apresentada no Curso de
Especialização em Engenharia de Petróleo e
Gás Natural da Universidade Federal
Fluminense, como requisito parcial para
obtenção do grau de especialista em Engenharia
de Petróleo e Gás Natural.
Professor Alfredo Moisés Vallejos Carrasco, D. Sc.
Universidade Federal Fluminense
NITERÓI, RJ
2016
MARCELO MENEZES DA SILVA
PREDIÇÃO DE ROP UTILIZANDO REDES NEURAIS ARTIFICIAIS NO CAMPO DE
JUBARTE (PRÉ-SAL, BRASIL)
Monografia apresentada no Curso de
Especialização em Engenharia de Petróleo e
Gás Natural da Universidade Federal
Fluminense, como requisito parcial para
obtenção do grau de especialista em Engenharia
de Petróleo e Gás Natural.
Aprovada em
BANCA EXAMINADORA
___________________________________________________________________________
Prof. Alfredo Moisés Vallejos Carrasco – D.Sc. (Orientador)
UFF – Universidade Federal Fluminense
___________________________________________________________________________
Prof. João Crisósthomo de Queiroz Neto – D.Sc.
UFF – Universidade Federal Fluminense
___________________________________________________________________________
Prof. Antônio Carlos Lage – D.Sc.
Petrobras – Petróleo Brasileiro S.A.
___________________________________________________________________________
Prof. Antônio Cláudio Soares – D.Sc.
Petrobras – Petróleo Brasileiro S.A.
NITERÓI, RJ
2016

Ao meu avô Francisco Osório (In memorian), um
exemplo de caráter e um profissional de sucesso. É
gratificante poder seguir seus passos na área
tecnológica, alcançando mais esta conquista.
Entretanto, a minha maior vitória será quando eu
conseguir ser, mesmo que de perto, o ser humano
fantástico que o senhor foi...
AGRADECIMENTOS
Gostaria de agradecer aos meus familiares pelo apoio incondicional, em especial ao
meu pai Paulinho, minha mãe Elenice, minha irmã Alice, minha sobrinha Laura e minha Tia
Carmen Lúcia.
À Ananda pelo companheirismo e pela parceria em todos os momentos.
Ao orientador D. Sc. Alfredo Moisés Vallejos Carrasco e aos membros da banca
avaliadora pelos ensinamentos e orientações.
À Sra. Tina, ao Coordenador Ronaldo Rollin Pinheiro e a todo corpo docente do Curso
de Especialização em Engenharia de Petróleo e Gás Natural da Universidade Federal
Fluminense pelo excelente trabalho desenvolvido.
Aos amigos Vinícius de Sá, Delci Silva, Diego Mercadal, Márcio Medeiros e Eliseu
Leonardo pela colaboração para o desenvolvimento deste trabalho.
A todos os colegas da área offshore, que se arriscam e passam grande parte do tempo
longe de suas famílias, enfrentando o confinamento, para desempenhar essa atividade de grande
importância para a sociedade.
A todos os colegas da Tuma J do Curso de Especialização em Engenharia de Petróleo
e Gás da Universidade Federal Fluminense.

SUMÁRIO
AGRADECIMENTOS, p.4
SUMÁRIO, p.5
LISTA DE ILUSTRAÇÕES, p.7
LISTA DE QUADROS, p.9
RESUMO, p.10
ABSTRACT, p.11
1. INTRODUÇÃO, p.12
1.1 APRESENTAÇÃO, p.12
1.2 OBJETIVO, p.13
1.3 ESTRUTURA DO TRABALHO, p.13
2. GEOLOGIA DA ÁREA, p.14
2.1 A BACIA DE CAMPOS E O PRÉ-SAL BRASILEIRO, p.14
2.2 O CAMPO DE JUBARTE, p.17
2.3 LITOLOGIA E ESTRUTURA DA ÁREA ESTUDADA, p.18
3. FATORES QUE AFETAM O ROP, p.20
3.1 INTRODUÇÃO, p.20
3.2 COLUNAS DE PERFURAÇÃO UTILIZADAS NOS POÇOS ESTUDADOS, p.22
3.2.1 TUBO DE PERFURAÇÃO (DRILL PIPE), p.24
3.2.2 COMANDO (DRILL COLLAR), p.25
3.2.3 HEAVY-WEIGHT DRILL PIPE, p.25
3.2.4 FERRAMENTAS MWD/LWD E DIRECIONAIS, p.26
3.2.5 BROCAS DE PERFURAÇÃO, p.28
3.3 INTERAÇÃO ENTRE OS PARÂMETROS DE PERFURAÇÃO E O ROP, p.28
3.3.1 PESO SOBRE BROCA (WOB – WEIGHT ON BIT), p.29
3.3.2 VELOCIDADE ROTATIVA DA BROCA (RPM), p.30
3.3.3 VAZÃO DE BOMBEIO DO FLUIDO DE PERFURAÇÃO, p.31
3.3.4 PROFUNDIDADE VERTICAL (TVD – TRUE VERTICAL DEPTH), p.33
3.3.5 LITOLOGIA DO POÇO, p.33
3.3.6 PRESSÃO DIFERENCIAL DO POÇO (OVERBALANCE), p.34

3.3.7 TEMPO DE TRÂNSITO, p.34
3.3.8 COMPOSIÇÃO DA COLUNA DE PERFURAÇÃO, p.35
3.3.9 DIÂMETRO DA BROCA, p.35
3.4 GENERALIZAÇÕES SOBRE O ROP A PARTIR DE EXPEIÊNCIAS EM POÇOS DE
CORRELAÇÃO DA REGIÃO ESTUDADA, p.36
4. REDES NEURAIS ARTIFICIAIS (RNA), p.39
4.1 INTRODUÇÃO, p.39
4.2 ARQUITETURAS DE REDES NEURAIS ARTIFICIAIS, p.45
4.2.1 REDES DIRETAS DE CAMADA SIMPLES, p.45
4.2.2 REDES DIRETAS DE CAMADAS MÚLTIPLAS (FEEDFORWARD), p.46
4.2.3 REDES RECORRENTES, p.47
4.3 APRENDIZADO DAS REDES NEURAIS ARTIFICIAIS, p.48
4.4 A REDE NEURAL IMPLEMENTADA PARA A PREDIÇÃO DE ROP, p.50
4.4.1 PERCEPTRON DE MÚLTIPLAS CAMADAS (MLP), p.50
4.4.2 ALGORITMO DE TREINAMENTO DE LEVENBERG-MARQUARDT, p.53
5. METODOLOGIA E RESULTADOS, p.55
5.1 SELEÇÃO DO MÉTODO PARA MODELAGEM DE ROP, p.55
5.2 AQUISIÇÃO E TRATAMENTO DOS DADOS, p.56
5.3 A REDE NEURAL IMPLEMENTADA, p.58
5.4 RESULTADOS OBTIDOS, p.60
5.4.1 ANÁLISE DA REGRESSÃO LINEAR, p.60
5.4.2 COEFICIENTE DE DETERMINAÇÃO (R²), p.60
5.4.3 ANÁLISE DOS RESULTADOS OBTIDOS, p.62
5.4.3.1 SIMULAÇÃO UTILIZANDO TODAS AS FASES DE PERFURAÇÃO, p.62
5.4.3.2 SIMULAÇÃO COM OS DADOS DA FASE DE 16” SEPARADAMENTE, p.64
5.4.3.3 SIMULAÇÃO COM OS DADOS DA FASE DE 12 ¼” SEPARADAMENTE, p.65
5.4.3.4 SIMULAÇÃO COM OS DADOS DA FASE DE 8 ½” SEPARADAMENTE, p.67
5.4.3.5 COMPARATIVO ENTRE TODAS AS SIMULAÇÕES, p.68
6. CONCLUSÕES, p.70
REFERÊNCIAS BIBLIOGRÁFICAS, p.71
LISTA DE ILUSTRAÇÕES
Fig.2.1: Evolução das bacias sedimentares mesozóicas no Brasil, p14.
Fig.2.2: Reservatórios do pré-sal na costa brasileira, p15.
Fig.2.3: Carta Estratigráfica da Bacia de Campos, p16.
Fig.2.4: Localização Geográfica da Bacia de Campos, p17.
Fig.2.5: Descrição litológica e projeto de um poço de correlação, p19.
Fig.3.1: Sonda semissubmersível de 4ª geração, p23.
Fig.3.2: Esquema típico de uma coluna de perfuração, p23.
Fig.3.3: Tubos de Perfuração (Drill Pipes), p24.
Fig.3.4: Comandos (Drill Collars), p25.
Fig.3.5: Tubo Pesado (Heavy-Weight Drill Pipe), p26.
Fig.3.6: Ferramenta MWD/LWD, p27.
Fig.3.7: Sistema Rotary Steerable, p27.
Fig.3.8: Tipos de brocas, (A) PDC, (B) Tricônica e (C) Impregnada, p28.
Fig.3.9: Comportamento do ROP em relação ao WOB, p29.
Fig.3.10: Comportamento do ROP em relação à velocidade rotativa da broca, p30.
Fig.3.11: Comportamento da pressão de fundo de poço em relação à vazão de bombeio, p32.
Fig.3.12: Esquemático da fase de 16” de um poço de correlação, p37.
Fig.3.13: Esquemático da fase de 12 ¼” de um poço de correlação, p38.
Fig.3.14: Esquemático da fase de 8 ½” de um poço de correlação, p38.
Fig.4.1: Neurônio humano, p39.
Fig.4.2: Modelo de um Neurônio Artificial, p41.
Fig.4.3: Função Linear, p43.
Fig.4.4: Função Limiar, p43.
Fig.4.5: Função Rampa, p44.
Fig.4.6: Função Sigmóide, p44.
Fig.4.7: Diagrama de uma rede direta de camada simples, p46.
Fig.4.8: Diagrama de uma rede direta de camadas múltiplas – Feedforward, p47.
Fig.4.9: Diagrama de uma rede recorrente – Feedbackward, p47.
Fig.4.10: Diagrama de uma Rede Neural Artificial, p49.
Fig.4.11: Ciclo de execução do ajuste dos pesos sinápticos, p49.
Fig.5.1: Ciclo de execução do projeto de uma RNA para modelagem de ROP, p58.
Fig.5.2: RNA Feedforward com 9 entradas, 10 neurônios na camada oculta e uma saída, p59.
Fig.5.3: A variável explicativa X é responsável pela variação nas observações Yi., p61.
Fig.5.4: A variável X não explica a variação de Yi com a Regressão Linear, p61.
Fig.5.5: Função performance da RNA implementada para todas as fases de perfuração, p62.
Fig.5.6: Coeficiente de determinação da RNA de todas as fases de perfuração, p63.
Fig.5.7: Comparativo entre o ROP real e ROP encontrado pela RNA para todas as fases, p63.
Fig.5.8: Função performance da RNA implementada com os dados da fase de 16”, p64.
Fig.5.9: Coeficiente de determinação da RNA com dados da fase de 16”, p64.
Fig.5.10: Comparativo entre o ROP real e ROP encontrado pela RNA para a fase de 16”, p65.
Fig.5.11: Função performance da RNA implementada com os dados da fase de 12 ¼”, p65.
Fig.5.12: Coeficiente de determinação, RNA implementada com os dados da fase de 12¼”, p66.
Fig.5.13: Comparativo entre o ROP real e ROP encontrado pela RNA para a fase de 12¼”, p66.
Fig.5.14: Função performance da RNA implementada com os dados da fase de 8 ½”, p67.
Fig.5.15: Coeficiente de determinação da RNA com os dados da fase de 8 ½”, p67.
Fig.5.16: Comparativo entre o ROP real e ROP encontrado pela RNA para a fase de 8 ½”, p68.
Fig.5.17: Comparativo dos Coeficientes de Determinação (R²) das simulações da RNA, p68.
Fig.5.18: Comparativo do erro quadrático médio obtido no treinamento da RNA, p69.
Fig.5.19: Convergência dos treinamentos da RNA (Épocas), p69.

LISTA DE QUADROS
Tabela 3.1: Fatores que afetam o ROP, p22.
Tabela 3.2: Taxas de penetração recomendadas para cada fase de perfuração, p36.
Tabela 5.1: Exemplo da amostragem dos parâmetros de perfuração do Campo de Jubarte, p57.
Tabela 5.2: Modelos heurísticos para definir a quantidade de neurônios da camada oculta, p58.
RESUMO
O mercado de Exploração e Produção de hidrocarbonetos está cada vez mais
competitivo com o advento de novas técnicas de exploração como o gás de folhelho e a extração
de areia betuminosa, por exemplo. Dessa forma, profissionais de exploração de petróleo devem
procurar soluções de otimização visando reduzir custos de investimento e aumentar a
produtividade para garantir o sucesso nos negócios. Considerando que a perfuração de poços
representa um custo relevante no investimento despendido em toda a cadeia de exploração e
produção de petróleo é proveniente da perfuração de poços, torna-se necessário aplicar
estratégias para reduzir ao máximo os custos operacionais deste segmento. Além disso, a
exploração offshore tem um custo ainda maior, demandando um alto investimento em diárias
de sondas de perfuração e logística em alto mar. No pré-sal brasileiro, esses custos são ainda
maiores, em se tratando de exploração em águas profundas. Diante dessa realidade, é
apresentado neste trabalho uma solução a baixo custo, que consiste na implementação de uma
Rede Neural Artificial (RNA), a partir de histórico de dados de parâmetros de perfuração de
poços de correlação do Campo de Jubarte, para a predição da taxa de penetração ou ROP (Rate
of penetration). Uma variável fundamental para a otimização da perfuração e redução dos
custos operacionais é, sem dúvida, a taxa de penetração. Com a modelagem do ROP é possível
obter um melhor entendimento da perfuração de poços de correlação, realizar uma previsão do
tempo gasto em cada fase e obter um planejamento de custos e viabilidade operacional.
Palavras chaves: Taxa de Penetração, Redes Neurais Artificiais, Perfuração Offshore.

ABSTRACT
The Oil and Gas E&P market has increasingly become more competitive due to the
advent of new hydrocarbons exploration objectives such as Shale Gas (obtained by
fracturing) and Bituminous Sands. Therefore, O&G professionals must find some
optimizations solutions aiming investments with cost reductions and productivity increased
to guarantee the business success. Regarding the relevant cost of Oilwell Drilling process
within all investments spent in the entire petroleum activity, it is needed to apply some
strategies to reduce as much as possible the operational costs of this segment. Moreover,
the offshore E&P demands a greater cost, with high investments in Drilling Rigs and
logistics. In the Brazilian Pre-Salt these costs are even higher considering the deepwater
exploration. Regarding this scenario, it is presented a low cost methodology, called
Artificial Neural Network (ANN), which is based on database of drilling parameters of
correlative oilwells located in Jubarte Field for ROP (Rate of penetration) performance
prediction. The head parameter to enhance the drilling operation and reduce costs is
undoubtedly the ROP. Modeling this parameter, it is possible to obtain relevant knowledge
of the correlative wells, forecasting the drilling time of each phase, achieving better costs
planning and operational feasibility.
Key words: Rate of Penetration, Artificial Neural Networks, Offshore Drilling.

12
1. INTRODUÇÃO
1.1 APRESENTAÇÃO
Em escala crescente, o mercado de Exploração e Produção de hidrocarbonetos está cada
vez mais competitivo. Dentre vários fatores que contribuem para este cenário, podemos citar o
advento de novas técnicas de exploração como o faturamento hidráulico e a extração de areia
betuminosa. Diante dessa realidade, os profissionais de exploração de petróleo devem procurar
por soluções de otimização de forma a reduzir custos de investimento e aumentar a
produtividade para garantir o sucesso nos negócios.
Considerando que a maior parte do investimento despendido em toda a cadeia de
exploração e produção de petróleo é proveniente da perfuração de poços, torna-se necessário
aplicar estratégias para reduzir ao máximo os custos operacionais deste segmento.
Além disso, a exploração offshore em tem um custo ainda maior, demandando um alto
investimento em diárias de sondas de perfuração e logística em alto mar. No pré-sal brasileiro,
esses custos são ainda maiores, em se tratando de exploração em águas profundas.
Grandes produtores de hidrocarbonetos como os Estados Unidos e alguns países do
oriente médio, contam com grandes reservas onshore, onde o investimento de exploração é
muito inferior comparado com os investimentos necessários para exploração offshore no Brasil.
Dessa forma, faz-se necessário o estudo para aplicações de ferramentas visando otimizar
a taxa de penetração, para reduzir os altos custos com as diárias de sondas offshore, com o
objetivo de manter a competitividade no cenário internacional.
Contudo, muitas empresas acabam investindo ainda mais em novos serviços e
ferramentas mais modernas com o intuito de minimizar o cost per unit (custo da perfuração por
unidade de comprimento perfurado). Entretanto, existem outras ferramentas de análise de
histórico de dados que possibilitam a modelagem de processos não-lineares, que podem ser
aplicadas com intuito de prever e otimizar a taxa de penetração ou ROP (Rate of penetration)
visando minimizar o custo da perfuração.
O estudo e a aplicação dessas ferramentas, em poços reais, serão discutidas a seguir,
neste trabalho.

13
1.2 OBJETIVO
Grande parte de todo o investimento despendido em todas as etapas da produção de
petróleo e gás natural é proveniente da fase de perfuração dos poços. Considerando que o custo
da perfuração offshore em águas profundas é ainda maior, faz-se necessário tomar medidas de
redução desses custos para garantir a sobrevivência e competitividade desse mercado.
Portanto, é apresentado neste trabalho, a aplicação de RNA (Redes neurais artificiais)
para a modelagem da taxa de penetração (ROP) baseado em históricos de parâmetros de
perfuração em poços de correlação no campo de Jubarte, localizado na bacia Campos, no pré-
sal brasileiro.
1.3 ESTRUTURA DO TRABALHO
O desenvolvimento deste trabalho está divido em capítulos conforme sumarizado a
seguir:
O Capítulo dois descreve a estrutura geológica do campo de Jubarte e apresenta
informações litológicas da região estudada no trabalho.
O Capítulo três contém um estudo sobre o ROP (Rate of Penetration) evidenciando
como a interação entre os parâmetros de perfuração afetam essa taxa de penetração e descreve
algumas generalizações realizadas com base em históricos da região em estudo.
O Capítulo quatro apresenta uma introdução sobre Redes Neurais Artificiais.
O Capítulo cinco apresenta e discute os resultados obtidos.
Finalmente são apresentadas as conclusões obtidas durante o desenvolvimento do
trabalho.

14
2. GEOLOGIA DA ÁREA
2.1 A BACIA DE CAMPOS E O PRÉ-SAL BRASILEIRO
A Bacia de Campos está localizada no litoral sudeste do Brasil, ocupando uma área de
cerca de 120.000 Km2, desses apenas 500 Km2 estão na porção emersa. À Norte limita-se com
a Bacia do Espírito Santo pelo Alto de Vitória, um afloramento do embasamento basáltico
associado à borda oeste da Cadeia Vitória-Trindade, enquanto que ao Sul seus domínios são
limitados pelo Alto de Cabo Frio, separando a Bacia de Campos da Bacia de Santos. À offshore
a bacia está limitada pela isóbata de 3.500 m, compreendendo assim desde porções emersas até
a região de águas ultraprofundas (ANP, 2015).
O petróleo descoberto na Bacia de Campos está relacionado ao potencial gerador de
hidrocarbonetos das rochas geradoras subsal do Barremiano, as quais podem ter carbono
orgânico total (COT) de até 9 por cento. Considera-se que vários reservatórios são da fase rifte
da evolução da bacia: calcáreos lacustres, ao passo que algumas acumulações são encontradas
em clásticos em trapas estratigráficas das sequências do Cretáceo e do Terciário. As rotas de
migração na Bacia de Campos são interpretadas como provenientes das rochas geradoras da
Formação Lagoa Feia, de idade Barremiana, para os reservatórios através de falhas lístricas
normais, superfícies de discordância, flancos de paleocânions, descontinuidades e rotas
associadas com diápiros e janelas de sal (ANP, 2015).
A evolução das bacias sedimentares mesozóicas da margem continental brasileira
compreende três sequências básicas: clástica não marinha, evaporítica e marinha, sendo que
essa última é subdividida nas sequências carbonáticas, transgressiva e regressiva como
representado na Figura 2.1.
Figura 2.1 – Evolução das bacias sedimentares mesozóicas no Brasil. (MOHRIAK, 2003)
15
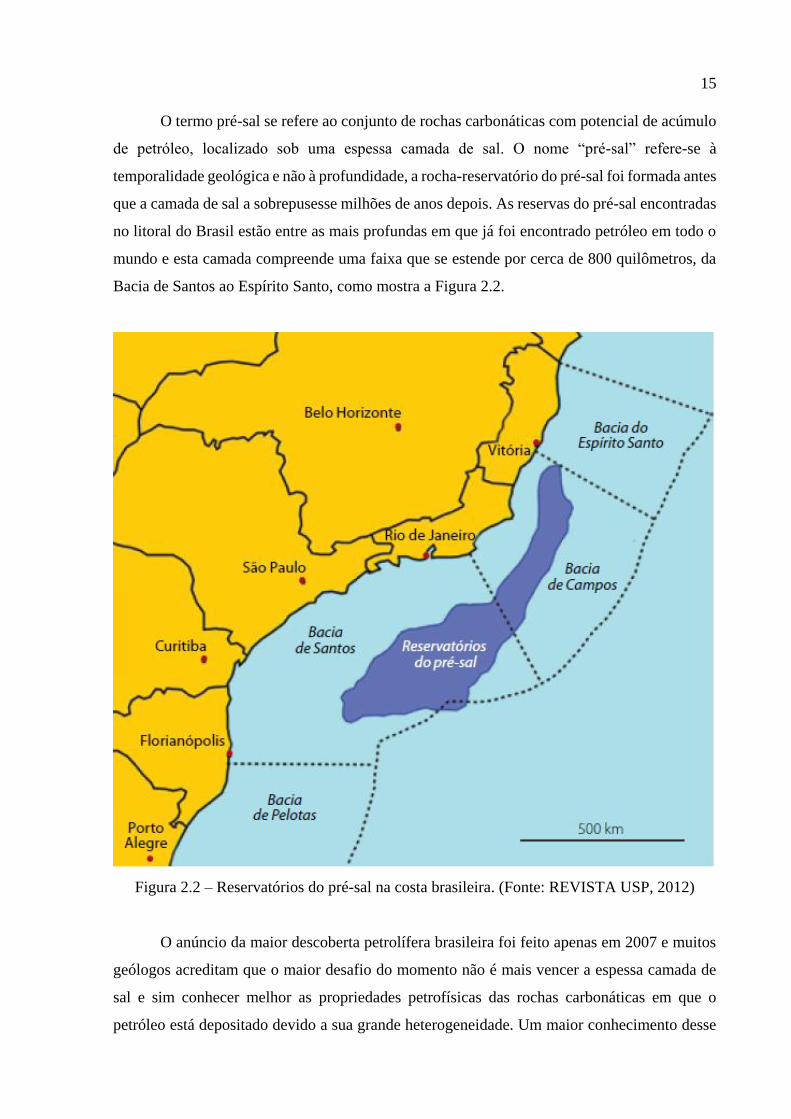
O termo pré-sal se refere ao conjunto de rochas carbonáticas com potencial de acúmulo
de petróleo, localizado sob uma espessa camada de sal. O nome “pré-sal” refere-se à
temporalidade geológica e não à profundidade, a rocha-reservatório do pré-sal foi formada antes
que a camada de sal a sobrepusesse milhões de anos depois. As reservas do pré-sal encontradas
no litoral do Brasil estão entre as mais profundas em que já foi encontrado petróleo em todo o
mundo e esta camada compreende uma faixa que se estende por cerca de 800 quilômetros, da
Bacia de Santos ao Espírito Santo, como mostra a Figura 2.2.
Figura 2.2 – Reservatórios do pré-sal na costa brasileira. (Fonte: REVISTA USP, 2012)
O anúncio da maior descoberta petrolífera brasileira foi feito apenas em 2007 e muitos
geólogos acreditam que o maior desafio do momento não é mais vencer a espessa camada de
sal e sim conhecer melhor as propriedades petrofísicas das rochas carbonáticas em que o
petróleo está depositado devido a sua grande heterogeneidade. Um maior conhecimento desse
16
tipo de rocha implicará diretamente no projeto de perfuração, completação e desenvolvimento
do campo numa forma de tentar otimizar as operações nessa região.
Camadas semelhantes de rocha “pré-sal” são encontradas em alguns outros locais do
mundo (litoral Atlântico da África, Golfo do México, Mar do Norte e Mar Cáspio). Entretanto,
ainda não se sabe ao certo se estas outras áreas subsal possuem grandes reservas petrolíferas
como “o pré-sal” no litoral brasileiro.
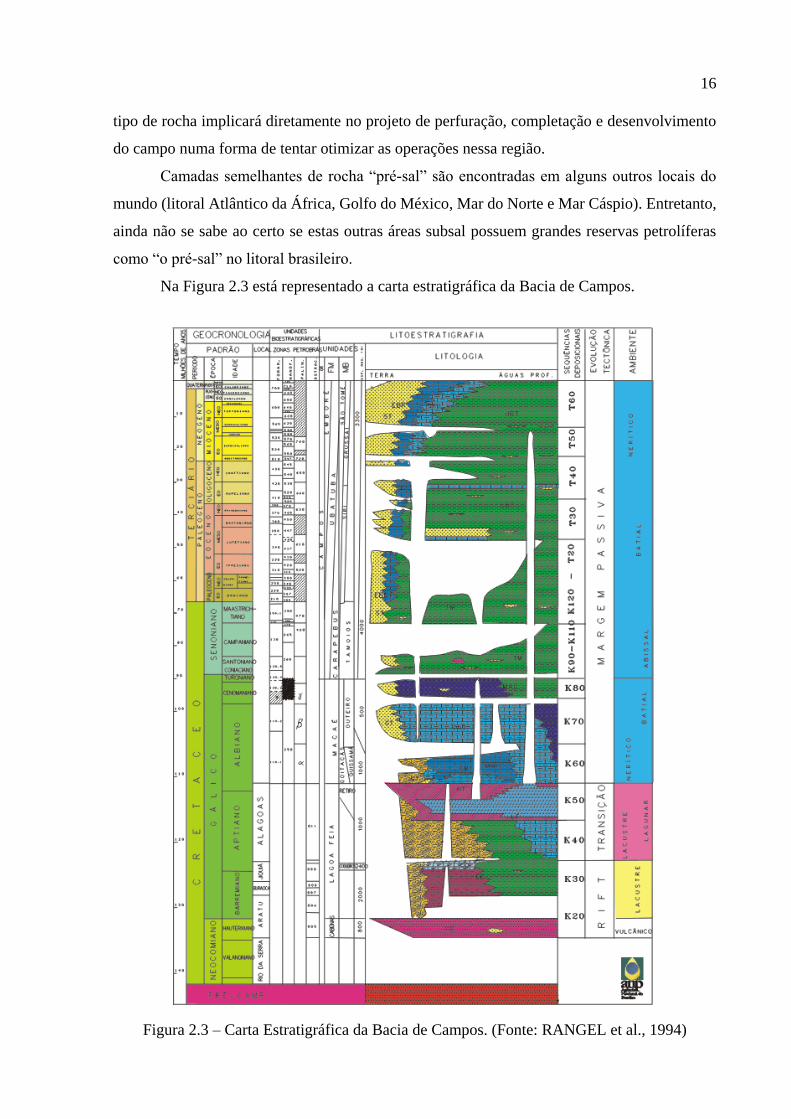
Na Figura 2.3 está representado a carta estratigráfica da Bacia de Campos.
Figura 2.3 – Carta Estratigráfica da Bacia de Campos. (Fonte: RANGEL et al., 1994)
17
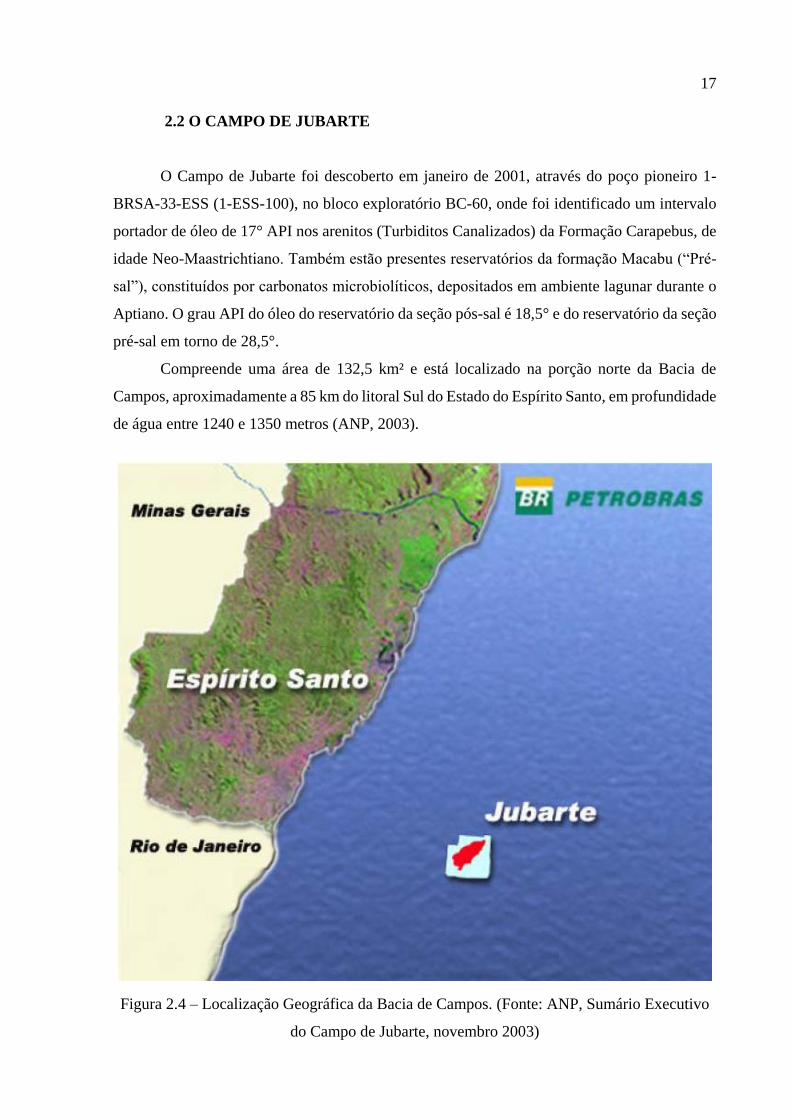
2.2 O CAMPO DE JUBARTE
O Campo de Jubarte foi descoberto em janeiro de 2001, através do poço pioneiro 1-
BRSA-33-ESS (1-ESS-100), no bloco exploratório BC-60, onde foi identificado um intervalo
portador de óleo de 17° API nos arenitos (Turbiditos Canalizados) da Formação Carapebus, de
idade Neo-Maastrichtiano. Também estão presentes reservatórios da formação Macabu (“Pré-
sal”), constituídos por carbonatos microbiolíticos, depositados em ambiente lagunar durante o
Aptiano. O grau API do óleo do reservatório da seção pós-sal é 18,5° e do reservatório da seção
pré-sal em torno de 28,5°.
Compreende uma área de 132,5 km² e está localizado na porção norte da Bacia de
Campos, aproximadamente a 85 km do litoral Sul do Estado do Espírito Santo, em profundidade
de água entre 1240 e 1350 metros (ANP, 2003).
Figura 2.4 – Localização Geográfica da Bacia de Campos. (Fonte: ANP, Sumário Executivo
do Campo de Jubarte, novembro 2003)
18
O arcabouço sedimentológico e estratigráfico do campo foi elaborado utilizando poços
testemunhados e correlações rocha-perfil. Com base nas estruturas sedimentares e textura das
rochas, foram indentificadas oito fácies sedimentares com as proporções conforme descritas
abaixo (ARIENTI et al., 2005):
a) Conglomerados (3%);
b) Arenitos conglomeráticos ou estratificados (14%);
c) Arenitos médios/grossos (43%);
d) Arenitos médios/finos estratificados (10%);
e) Fácies heterolíticas: inter-laminados de arenitos finos e folhelhos, margas e folhelhos
(19%);
f) Diamictitos.
2.3 LITOLOGIA E ESTRUTURA DA ÁREA ESTUDADA
A área estudada neste projeto está localizada no extremo norte da Bacia de Campos, a
cerca de 70 a 80 km de distância da costa de Anchieta-ES, na porção leste do Campo de Jubarte.
Os reservatórios em questão são carbonáticos do Pré-Sal da Formação Macabu, de idade
Alagoas, e da Formação Coqueiros, de idade Jiquiá.
Os poços de correlação dessa região, que foram estudados neste trabalho, possuem
basicamente a mesma estrutura de projeto, como mostra a Figura 2.5:
Revestimento condutor Base Torpedo de 30”;
Perfuração com broca de 26” e revestimento de 20”;
Perfuração com broca de 16” e revestimento de 13 ⅜”;
Perfuração com broca de 12 ¼”, alargador de 14 ¾” e revestimento de 10 ¾”.
A Lâmina d’água dos poços estudados está entre 1200 a 1450 m, com litologia
basicamente constituída por Formação Macabú e Formação Coqueiros/Calcário microbial e
Coquina (carbonatos).
Na figura 4 é apresentada uma descrição litológica de um poço de correlação estudado:
Fase de broca de 26”: Camada espessa de Folhelho;
Fase de 16”: Camada espessa de Folhelho com intercalações de Arenito Miocênico,
intercalações de Arenito Oligocênico, intercalações de Marco Roxo e Marco Azul,
camada espessa de Arenito;

19
Fase de 12 ¼” x 14 ¼”: Calcilutito (CLU), “Camada de Sal” (Anidrita e Halita) e
Calcário;
Fase de 8 ½”: Calcário e Coquina.
Figura 2.5 – Descrição litológica e projeto de um poço de correlação. (Figura adaptada)
FUNDO DO MAR
FOLHELHO
ARENITO MIOCÊNICO
ARENITO OLIGOCÊNICO
MARCO ROXO
MARCO AZUL
TOPO K
ARENITO
CALCILUTITO
ANIDRITA
HALITA
ANIDRITA
CALCÁRIO
COCQUINA
1344 m
1355 m
1962 m
3493 m
4210 m
4657 m
30“
26“ / 20”
16“ / 13 ⅜”
12 ¼” / 10 ¾“
8 ½” / 7“

20
3. FATORES QUE AFETAM O ROP
3.1 INTRODUÇÃO
A Taxa de Penetração de Broca (Rate of Penetration, ROP) é definida como a distância
perfurada pela broca de por unidade de tempo. Está diretamente ligado aos parâmetros
operacionais como, por exemplo, o Peso Sobre Broca (Weight on bit - WOB) e a Velocidade
Rotativa da Broca (RPM). Os principais fatores que alteram o ROP seriam (BOURGOYNE et
al., 1986):
(i) Tipo de broca;
(ii) Características da formação;
(iii) Propriedade dos fluidos de perfuração;
(iv) Hidráulica da broca.
O ROP é um dos parâmetros mais importantes na perfuração de poços, considerando a
sua relação direta com o tempo gasto na perfuração, bem como o custo de uma fase de
perfuração. Portanto, a maximização dessa taxa é sempre visada para garantir redução de custo
e otimização operacional.
Existe um método para calcular o custo de perfuração por comprimento (Cost per foot)
como apresentado na Equação 3.1 (RASTEGAR, et al., 2008).
𝐶 =𝑅 ∙ (𝑇 + Δ𝑇) + 𝐵
𝐷 (3.1)
Onde:
C = custo da perfuração por unidade de medida ($/ft) ou ($/m)
R = custo operacional da sonda de perfuração por hora ($/h)
T = tempo de manobra da coluna de perfuração (h)
ΔT = tempo gasto na perfuração (h)
B = custo da broca ($)
D = profundidade da perfuração (ft) ou (m)
Essa fórmula é aplicável para qualquer tipo de broca, podendo ser utilizada após uma
corrida de broca, utilizando dados reais de desempenho para calcular o custo real por pé ou
pode ser utilizada antes da perfuração, assumindo valores aproximados e comparando com os
21
reais. Esses dados geralmente são calculados e comparados com os dados reais de poços de
correlação.
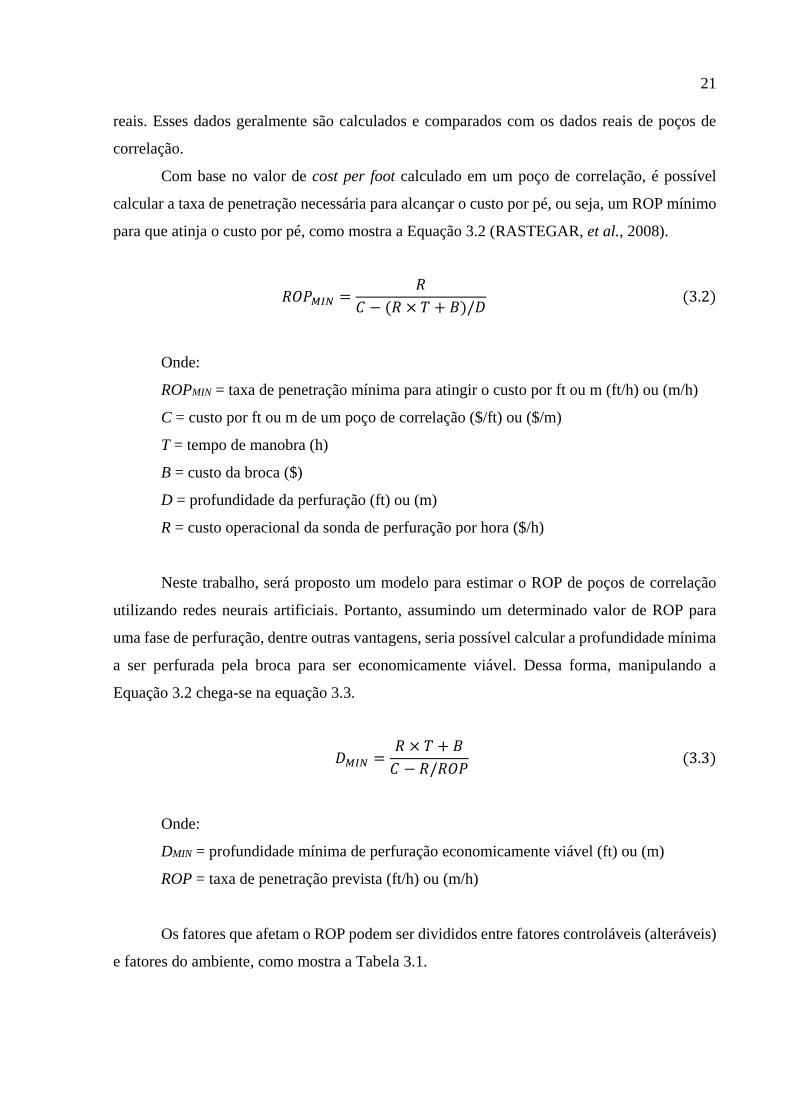
Com base no valor de cost per foot calculado em um poço de correlação, é possível
calcular a taxa de penetração necessária para alcançar o custo por pé, ou seja, um ROP mínimo
para que atinja o custo por pé, como mostra a Equação 3.2 (RASTEGAR, et al., 2008).
𝑅𝑂𝑃𝑀𝐼𝑁 =𝑅
𝐶 − (𝑅 × 𝑇 + 𝐵)/𝐷 (3.2)
Onde:
ROPMIN = taxa de penetração mínima para atingir o custo por ft ou m (ft/h) ou (m/h)
C = custo por ft ou m de um poço de correlação ($/ft) ou ($/m)
T = tempo de manobra (h)
B = custo da broca ($)
D = profundidade da perfuração (ft) ou (m)
R = custo operacional da sonda de perfuração por hora ($/h)
Neste trabalho, será proposto um modelo para estimar o ROP de poços de correlação
utilizando redes neurais artificiais. Portanto, assumindo um determinado valor de ROP para
uma fase de perfuração, dentre outras vantagens, seria possível calcular a profundidade mínima
a ser perfurada pela broca para ser economicamente viável. Dessa forma, manipulando a
Equação 3.2 chega-se na equação 3.3.
𝐷𝑀𝐼𝑁 =𝑅 × 𝑇 + 𝐵
𝐶 − 𝑅/𝑅𝑂𝑃 (3.3)
Onde:
DMIN = profundidade mínima de perfuração economicamente viável (ft) ou (m)
ROP = taxa de penetração prevista (ft/h) ou (m/h)
Os fatores que afetam o ROP podem ser divididos entre fatores controláveis (alteráveis)
e fatores do ambiente, como mostra a Tabela 3.1.
22
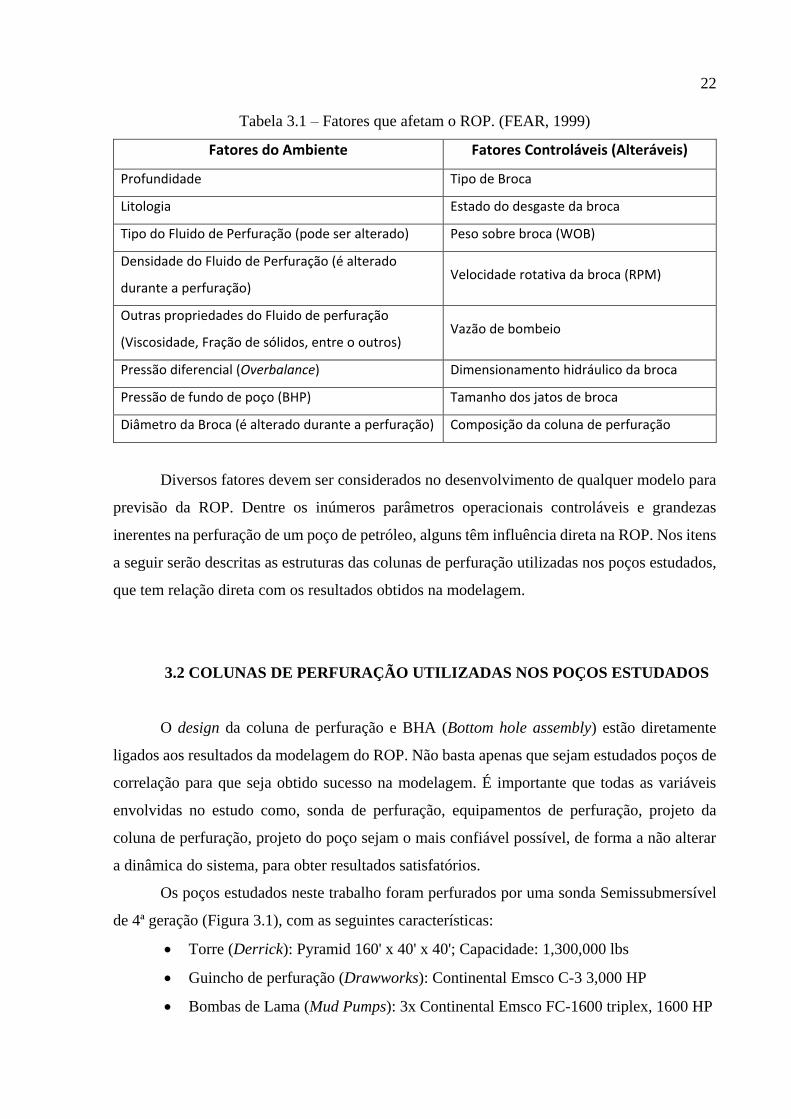
Tabela 3.1 – Fatores que afetam o ROP. (FEAR, 1999)
Fatores do Ambiente Fatores Controláveis (Alteráveis)
Profundidade Tipo de Broca
Litologia Estado do desgaste da broca
Tipo do Fluido de Perfuração (pode ser alterado) Peso sobre broca (WOB)
Densidade do Fluido de Perfuração (é alterado
durante a perfuração) Velocidade rotativa da broca (RPM)
Outras propriedades do Fluido de perfuração
(Viscosidade, Fração de sólidos, entre o outros) Vazão de bombeio
Pressão diferencial (Overbalance) Dimensionamento hidráulico da broca
Pressão de fundo de poço (BHP) Tamanho dos jatos de broca
Diâmetro da Broca (é alterado durante a perfuração) Composição da coluna de perfuração
Diversos fatores devem ser considerados no desenvolvimento de qualquer modelo para
previsão da ROP. Dentre os inúmeros parâmetros operacionais controláveis e grandezas
inerentes na perfuração de um poço de petróleo, alguns têm influência direta na ROP. Nos itens
a seguir serão descritas as estruturas das colunas de perfuração utilizadas nos poços estudados,
que tem relação direta com os resultados obtidos na modelagem.
3.2 COLUNAS DE PERFURAÇÃO UTILIZADAS NOS POÇOS ESTUDADOS
O design da coluna de perfuração e BHA (Bottom hole assembly) estão diretamente
ligados aos resultados da modelagem do ROP. Não basta apenas que sejam estudados poços de
correlação para que seja obtido sucesso na modelagem. É importante que todas as variáveis
envolvidas no estudo como, sonda de perfuração, equipamentos de perfuração, projeto da
coluna de perfuração, projeto do poço sejam o mais confiável possível, de forma a não alterar
a dinâmica do sistema, para obter resultados satisfatórios.
Os poços estudados neste trabalho foram perfurados por uma sonda Semissubmersível
de 4ª geração (Figura 3.1), com as seguintes características:
Torre (Derrick): Pyramid 160' x 40' x 40'; Capacidade: 1,300,000 lbs
Guincho de perfuração (Drawworks): Continental Emsco C-3 3,000 HP
Bombas de Lama (Mud Pumps): 3x Continental Emsco FC-1600 triplex, 1600 HP
23
Top Drive: Maritime Hydraulics DDM-650L-DC , 650 ton, 1100 HP
Mesa rotativa: Continental Emsco 49.5 in. Model T-4950-65
Figura 3.1 – Sonda semissubmersível de 4ª geração. (Fonte: RIG ZONE)
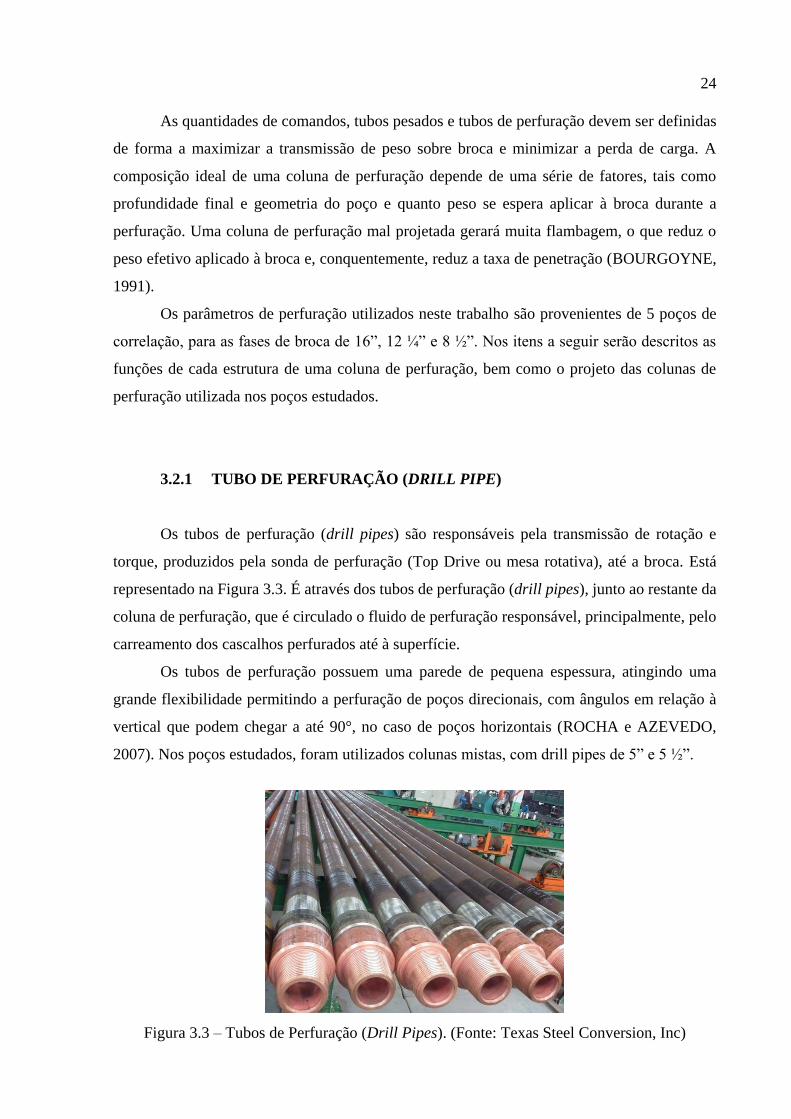
Uma coluna de perfuração é constituída basicamente de tubos de perfuração e BHA
(Bottom Hole Assembly). O BHA seria o conjunto de fundo de poço, composto por comandos
(Drill Collars), Ferramentas MWD/LWD, Ferramentas Direcionais e broca. A Figura 3.2
representa um esquema básico de uma coluna de perfuração.
Figura 3.2 – Esquema típico de uma coluna de perfuração. (Figura adaptada).
BROCA
MWD/LWD
DRILL COLLAR
HEAVY-WEIGHT DRILL PIPE
DRILL PIPE
24
As quantidades de comandos, tubos pesados e tubos de perfuração devem ser definidas
de forma a maximizar a transmissão de peso sobre broca e minimizar a perda de carga. A
composição ideal de uma coluna de perfuração depende de uma série de fatores, tais como
profundidade final e geometria do poço e quanto peso se espera aplicar à broca durante a
perfuração. Uma coluna de perfuração mal projetada gerará muita flambagem, o que reduz o
peso efetivo aplicado à broca e, conquentemente, reduz a taxa de penetração (BOURGOYNE,
1991).
Os parâmetros de perfuração utilizados neste trabalho são provenientes de 5 poços de
correlação, para as fases de broca de 16”, 12 ¼” e 8 ½”. Nos itens a seguir serão descritos as
funções de cada estrutura de uma coluna de perfuração, bem como o projeto das colunas de
perfuração utilizada nos poços estudados.
3.2.1 TUBO DE PERFURAÇÃO (DRILL PIPE)
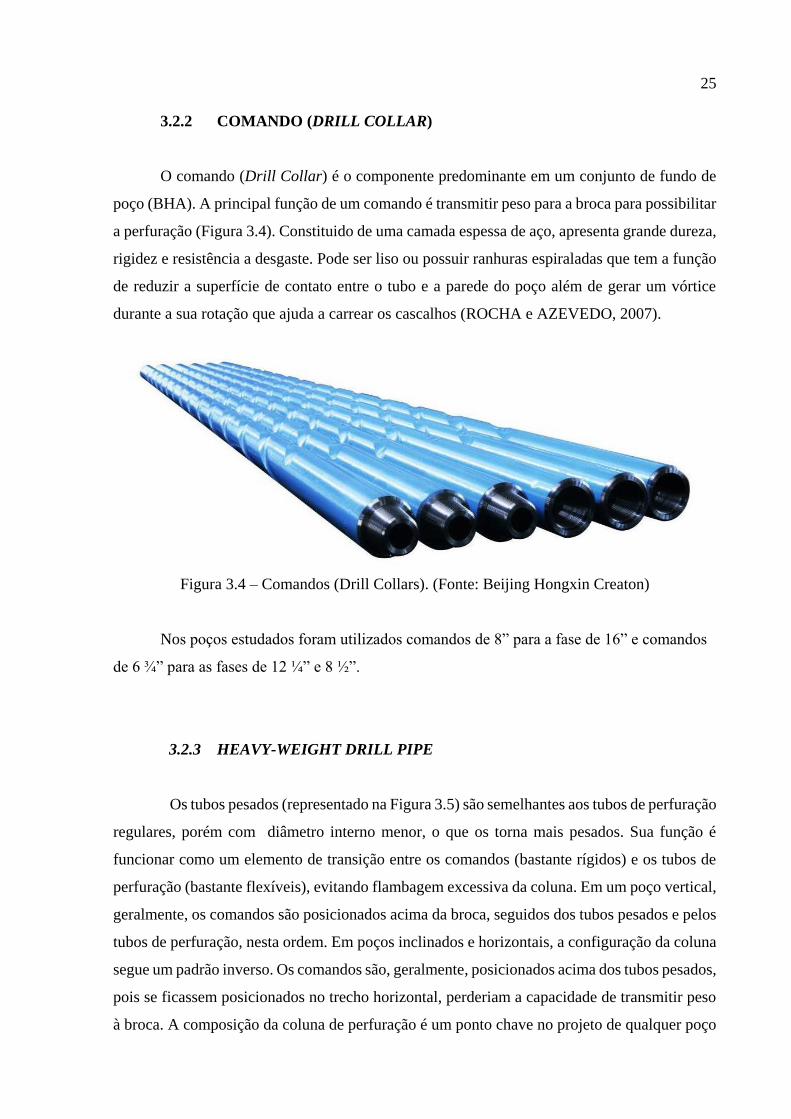
Os tubos de perfuração (drill pipes) são responsáveis pela transmissão de rotação e
torque, produzidos pela sonda de perfuração (Top Drive ou mesa rotativa), até a broca. Está
representado na Figura 3.3. É através dos tubos de perfuração (drill pipes), junto ao restante da
coluna de perfuração, que é circulado o fluido de perfuração responsável, principalmente, pelo
carreamento dos cascalhos perfurados até à superfície.
Os tubos de perfuração possuem uma parede de pequena espessura, atingindo uma
grande flexibilidade permitindo a perfuração de poços direcionais, com ângulos em relação à
vertical que podem chegar a até 90°, no caso de poços horizontais (ROCHA e AZEVEDO,
2007). Nos poços estudados, foram utilizados colunas mistas, com drill pipes de 5” e 5 ½”.
Figura 3.3 – Tubos de Perfuração (Drill Pipes). (Fonte: Texas Steel Conversion, Inc)
25
3.2.2 COMANDO (DRILL COLLAR)
O comando (Drill Collar) é o componente predominante em um conjunto de fundo de
poço (BHA). A principal função de um comando é transmitir peso para a broca para possibilitar
a perfuração (Figura 3.4). Constituido de uma camada espessa de aço, apresenta grande dureza,
rigidez e resistência a desgaste. Pode ser liso ou possuir ranhuras espiraladas que tem a função
de reduzir a superfície de contato entre o tubo e a parede do poço além de gerar um vórtice
durante a sua rotação que ajuda a carrear os cascalhos (ROCHA e AZEVEDO, 2007).
Figura 3.4 – Comandos (Drill Collars). (Fonte: Beijing Hongxin Creaton)
Nos poços estudados foram utilizados comandos de 8” para a fase de 16” e comandos
de 6 ¾” para as fases de 12 ¼” e 8 ½”.
3.2.3 HEAVY-WEIGHT DRILL PIPE
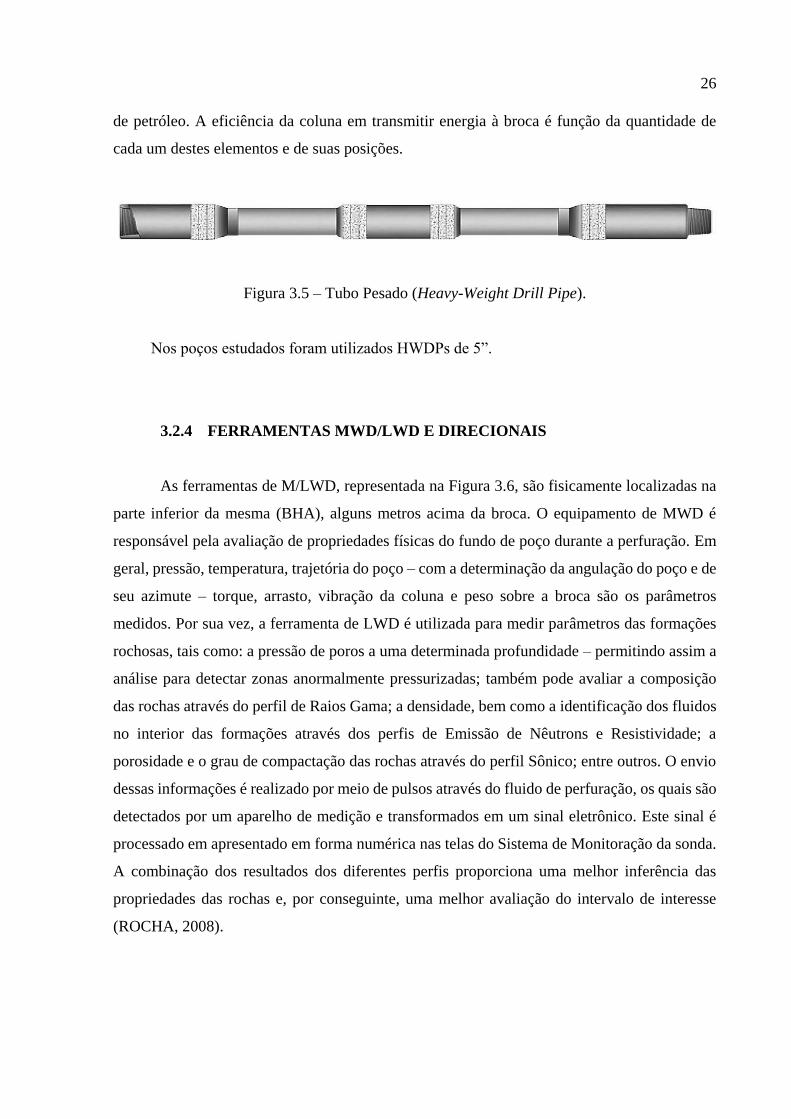
Os tubos pesados (representado na Figura 3.5) são semelhantes aos tubos de perfuração
regulares, porém com diâmetro interno menor, o que os torna mais pesados. Sua função é
funcionar como um elemento de transição entre os comandos (bastante rígidos) e os tubos de
perfuração (bastante flexíveis), evitando flambagem excessiva da coluna. Em um poço vertical,
geralmente, os comandos são posicionados acima da broca, seguidos dos tubos pesados e pelos
tubos de perfuração, nesta ordem. Em poços inclinados e horizontais, a configuração da coluna
segue um padrão inverso. Os comandos são, geralmente, posicionados acima dos tubos pesados,
pois se ficassem posicionados no trecho horizontal, perderiam a capacidade de transmitir peso
à broca. A composição da coluna de perfuração é um ponto chave no projeto de qualquer poço
26
de petróleo. A eficiência da coluna em transmitir energia à broca é função da quantidade de
cada um destes elementos e de suas posições.
Figura 3.5 – Tubo Pesado (Heavy-Weight Drill Pipe).
Nos poços estudados foram utilizados HWDPs de 5”.
3.2.4 FERRAMENTAS MWD/LWD E DIRECIONAIS
As ferramentas de M/LWD, representada na Figura 3.6, são fisicamente localizadas na
parte inferior da mesma (BHA), alguns metros acima da broca. O equipamento de MWD é
responsável pela avaliação de propriedades físicas do fundo de poço durante a perfuração. Em
geral, pressão, temperatura, trajetória do poço – com a determinação da angulação do poço e de
seu azimute – torque, arrasto, vibração da coluna e peso sobre a broca são os parâmetros
medidos. Por sua vez, a ferramenta de LWD é utilizada para medir parâmetros das formações
rochosas, tais como: a pressão de poros a uma determinada profundidade – permitindo assim a
análise para detectar zonas anormalmente pressurizadas; também pode avaliar a composição
das rochas através do perfil de Raios Gama; a densidade, bem como a identificação dos fluidos
no interior das formações através dos perfis de Emissão de Nêutrons e Resistividade; a
porosidade e o grau de compactação das rochas através do perfil Sônico; entre outros. O envio
dessas informações é realizado por meio de pulsos através do fluido de perfuração, os quais são
detectados por um aparelho de medição e transformados em um sinal eletrônico. Este sinal é
processado em apresentado em forma numérica nas telas do Sistema de Monitoração da sonda.
A combinação dos resultados dos diferentes perfis proporciona uma melhor inferência das
propriedades das rochas e, por conseguinte, uma melhor avaliação do intervalo de interesse
(ROCHA, 2008).
27
Figura 3.6 – Ferramenta MWD/LWD. (Fonte: Catálogo Schlumberger)
Outra ferramenta utilizada para compor o BHA dos poços estudados é o sistema Rotary
Sistema Direcional Rotativo, ou Rotary Steerable System (RSS), mostrado na Figura 3.7. Em
resumo, o Rotary Steerable System consiste em uma ferramenta de fundo de poço responsável
por perfurar direcionalmente a partir de uma rotação lhe imposta na superfície, eliminando a
necessidade de deslizamentos como para motores de lama.
Figura 3.7 – Sistema Rotary Steerable. (Fonte: Revista Drilling Contractor, 07/2015)
A rotação contínua da coluna de perfuração ajuda na circulação de cascalhos para a
superfície resultando em um melhor desempenho hidráulico, permitindo que trajetórias de poço
cada vez mais complexas sejam perfuradas Além disso, permite o alcance de direções mais
firmes, com menos tortuosidades, o que leva a uma geometria menos agressiva e a parede do
poço é mais suave se comparada a perfuração com motor de fundo. À medida que os
reservatórios encontrados estão em zonas cada vez mais remotas, esta tecnologia irá permitir
um maior número de poços economicamente viáveis (ROCHA, 2008).

28
3.2.5 BROCAS DE PERFURAÇÃO
Na extremidade da coluna de perfuração é onde se localiza a broca. Ela é responsável
por causar fragmentação da rocha devido ao peso sobre broca e ao movimento rotativo que lhe
é transferido. Na Figura 3.8 são apresentados os tipos de brocas de perfuração. As brocas com
partes imóveis englobam as brocas integrais de lâmina de aço, as brocas de diamantes naturais
e artificiais, chamadas de PDC (Polycrystalline Diamond Compact) como mostra a
Figura 3.8 A . As brocas com partes móveis são geralmente formadas por uma estrutura cortante
de três cones que giram em torno de um eixo próprio, sendo por isso, comumente chamadas de
brocas tricônicas (Figura 3.8 B). Há ainda casos de brocas especiais, de acordo com a finalidade
da broca, como alargamento ou testemunho, quando se deseja alargar o diâmetro da fase
perfurada e quando se deseja obter uma amostra de rocha, respectivamente (Figura 3.9 C).
Figura 3.8 – Tipos de brocas, (A) PDC, (B) Tricônica e (C) Impregnada. (Fonte: Smith, 2015)
Em todos os poços estudadados foram utilizados brocas de PDC de 16”, 12 ¼” e 8 ½”.
3.3 INTERAÇÃO ENTRE OS PARÂMETROS DE PERFURAÇÃO E O ROP
Diversos parâmetros são considerados no desenvolvimento de qualquer modelo para
previsão de ROP. Entre eles, diversos parâmetros operacionais de perfuração de poço. A seguir,
é feita uma discussão sobre cada um dos parâmetros.
(A) (B) (C)
29
3.3.1 PESO SOBRE BROCA (WOB – WEIGHT ON BIT)
Parte do peso da coluna de perfuração é sustentada por um gancho, localizado em
superfície, na plataforma. A outra parte do peso é transmitido diretamente à broca. Em
superfície, o “sondador” é responsável por controlar o peso transmitido à broca, o que é feito
reduzindo ou aumentando a fração do peso da coluna sustentada no gancho, conforme a
necessidade e as condições operacionais. Ao se reduzir a fração de peso sustentado no gancho,
aumenta-se o peso sobre broca e vice versa. O peso total de uma coluna de perfuração varia
muito com a composição da mesma e a profundidade do poço.
O peso aplicado à broca também varia muito, dependendo do tipo de formação e da ROP
desejada. Valores típicos variam de zero (quando se deseja interromper a perfuração) a cerca
de 30 toneladas. O peso sobre broca tem uma influência direta sobre a taxa de penetração.
Quanto maior o peso aplicado à broca, maior será a pressão exercida sobre a formação e mais
facilmente ela será perfurada. Este é o parâmetro que tem a maior influência na taxa de
penetração e, por isso, é o primeiro a ser variado quando se deseja aumentar ou reduzir a
velocidade da perfuração (AADNOY et al, 2009).
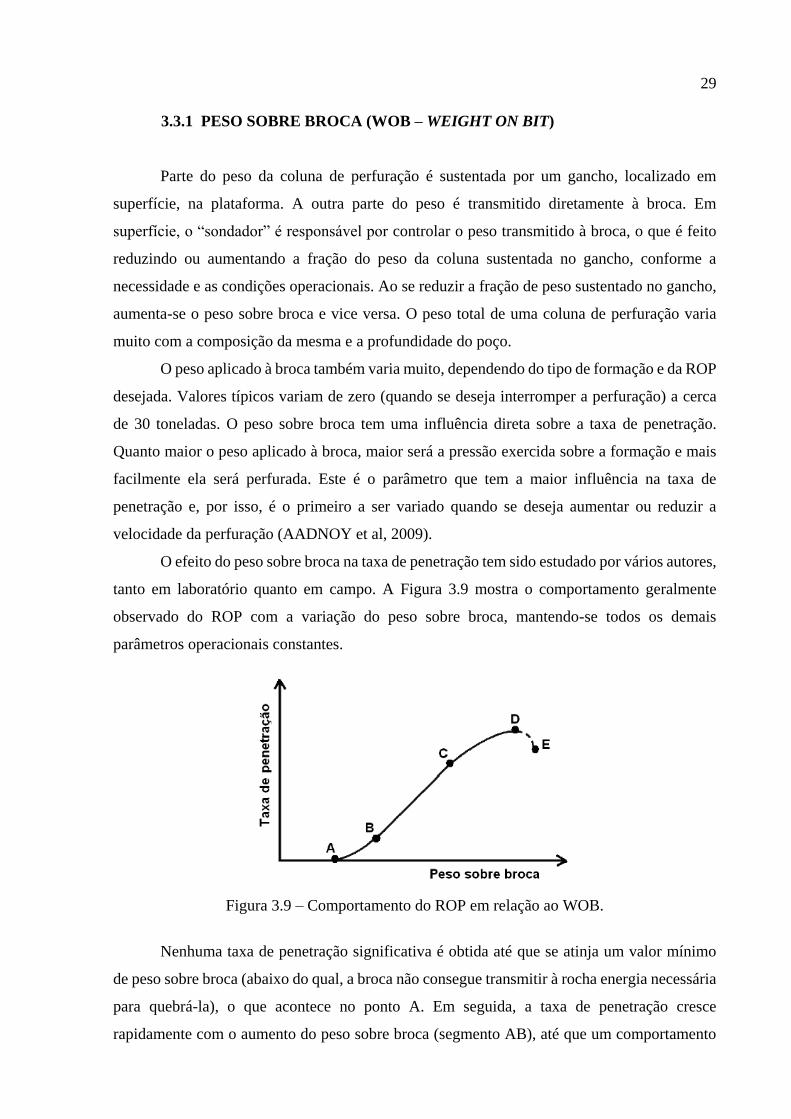
O efeito do peso sobre broca na taxa de penetração tem sido estudado por vários autores,
tanto em laboratório quanto em campo. A Figura 3.9 mostra o comportamento geralmente
observado do ROP com a variação do peso sobre broca, mantendo-se todos os demais
parâmetros operacionais constantes.
Figura 3.9 – Comportamento do ROP em relação ao WOB.
Nenhuma taxa de penetração significativa é obtida até que se atinja um valor mínimo
de peso sobre broca (abaixo do qual, a broca não consegue transmitir à rocha energia necessária
para quebrá-la), o que acontece no ponto A. Em seguida, a taxa de penetração cresce
rapidamente com o aumento do peso sobre broca (segmento AB), até que um comportamento

30
linear é obtido (segmento BC). Entretanto, a partir de um determinado valor de peso sobre
broca, os ganhos na taxa de penetração observados com o aumento do peso começam a ser
reduzidos (segmento CD). Em alguns casos, chega-se a observar uma queda na taxa de
penetração para valores de pesos sobre broca muito elevados (segmento DE). A perda de
eficiência na taxa de penetração com o aumento do peso sobre broca se deve a dois fatores. O
primeiro deles é a queda na eficiência de remoção de sólidos do poço. Uma taxa de penetração
elevada gera uma quantidade de sólidos muito grande, que não é removida adequadamente.
Assim, a broca necessita retrabalhar sólidos já perfurados (e não removidos), o que reduz sua
eficiência. O segundo fator é que um peso excessivamente alto sobre a broca causa flambagem
e vibração de coluna, dissipando parte da energia que deveria ser transmitida à broca para o
corte das formações geológicas (BOURGOYNE et al., 1991).
3.3.2 VELOCIDADE ROTATIVA DA BROCA (RPM)
Junto com o peso sobre broca (WOB) a rotação é um dos parâmetros com maior
influência na taxa de penetração. O aumento da rotação da broca aumenta a energia transmitida
à formação o que ajuda no corte da mesma (BOURGOYNE et al., 1991).
Entretanto, há um limite para o efeito do aumento da rotação da broca. O aumento
excessivo da rotação pode causar vibrações na coluna de perfuração, dissipando parte da energia
que deveria ser transmitida à broca. Isto causa a redução da taxa de penetração, além de desgaste
da broca, dos equipamentos de fundo e, em casos extremos, fadiga e quebra da coluna de
perfuração (WOLF et al., 1985). A Figura 3.10 mostra o comportamento típico esperado da
taxa de penetração com a rotação da broca, mantendo-se constante todos os demais parâmetros
operacionais.
Figura 3.10 – Comportamento do ROP em relação à velocidade rotativa da broca.

31
É esperado um aumento linear da taxa de penetração até um determinado valor de
rotação da broca (Ponto B), a partir do qual a eficiência de corte diminui. Assim como no caso
do peso sobre broca, a queda da eficiência na taxa de penetração se deve a dois fatores: baixa
eficiência na remoção dos sólidos gerados pela broca e dissipação de energia por vibração de
coluna.
3.3.3 VAZÃO DE BOMBEIO DO FLUIDO DE PERFURAÇÃO
A vazão pode atuar de duas formas distintas e antagônicas na taxa de penetração. Ao
passar pelos jatos da broca, parte da energia do fluido é convertida em energia de impacto
hidráulico, o que auxilia o corte da formação. Assim, um aumento da vazão leva a um aumento
da energia hidráulica de impacto o que causa um aumento da taxa de penetração (JAMES et al.,
2003).
Entretanto, nos cenários perfurados atualmente, as profundidades de lámina d’água
estão cada vez maiores, bem como as profundidades finais dos poços. Isto gera uma perda de
carga muito elevada (tanto no interior da coluna quanto no anular), fazendo com que as pressões
de bombeio atingidas cheguem perto dos limites dos equipamentos disponíveis no mercado e
obrigando os engenheiros projetistas de perfuração a abrir mão da força de impacto e usar
brocas com jatos de diâmetros maiores. Por outro lado, deve-se levar em conta também o efeito
da vazão na pressão de fundo de poço. Um aumento ou diminuição na pressão causada pela
vazão também vai influenciar na ROP. O aumento da vazão leva a um aumento das perdas de
carga no anular do poço, o que tende a aumentar a pressão de fundo. Entretanto, o aumento da
vazão também leva a melhora nas condições de limpeza do poço, ou seja, redução da
concentração volumétrica de sólidos, o que, por sua vez, tende a reduzir a pressão de fundo.
Assim, o efeito líquido da variação da vazão na pressão de fundo (e, consequentemente,
na ROP) não é obvio e dependerá de variáveis tais como reologia do fluido de perfuração, faixa
de vazão em que a análise é feita, nível de concentração de sólidos e geometria do poço. A
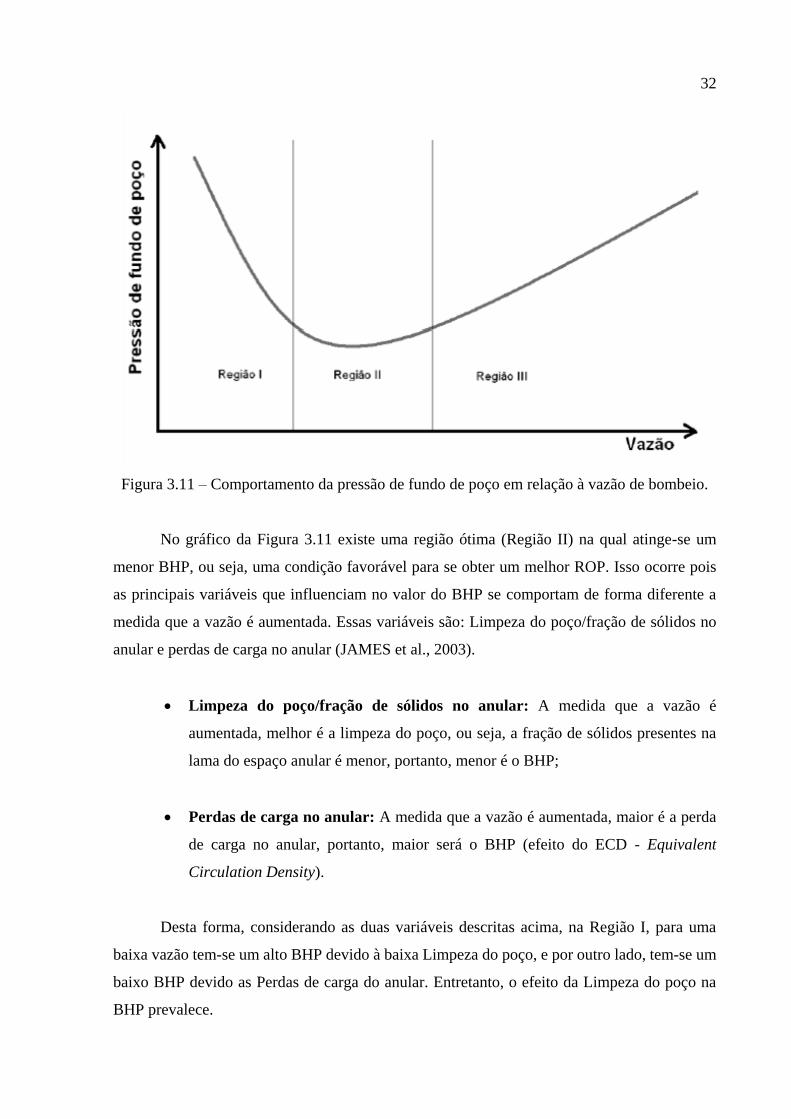
Figura 3.11 mostra o comportamento esperado da pressão com a vazão (ARAGÃO et al, 2005).
32
Figura 3.11 – Comportamento da pressão de fundo de poço em relação à vazão de bombeio.
No gráfico da Figura 3.11 existe uma região ótima (Região II) na qual atinge-se um
menor BHP, ou seja, uma condição favorável para se obter um melhor ROP. Isso ocorre pois
as principais variáveis que influenciam no valor do BHP se comportam de forma diferente a
medida que a vazão é aumentada. Essas variáveis são: Limpeza do poço/fração de sólidos no
anular e perdas de carga no anular (JAMES et al., 2003).
Limpeza do poço/fração de sólidos no anular: A medida que a vazão é
aumentada, melhor é a limpeza do poço, ou seja, a fração de sólidos presentes na
lama do espaço anular é menor, portanto, menor é o BHP;
Perdas de carga no anular: A medida que a vazão é aumentada, maior é a perda
de carga no anular, portanto, maior será o BHP (efeito do ECD - Equivalent
Circulation Density).
Desta forma, considerando as duas variáveis descritas acima, na Região I, para uma
baixa vazão tem-se um alto BHP devido à baixa Limpeza do poço, e por outro lado, tem-se um
baixo BHP devido as Perdas de carga do anular. Entretanto, o efeito da Limpeza do poço na
BHP prevalece.

33
No outro extremo gráfico, na Região III, tem-se um baixo BHP pelo fato do poço estar
muito limpo (pequena fração de sólidos) e com alta vazão. Contudo, para uma alta vazão, a
perda de carga vai ser muito grande no anular tornando a BHP alta. Neste caso, o efeito da perda
de carga na BHP vai prevalecer em relação ao efeito da limpeza do poço. Portanto, na Região
II é possível obter o menor BHP considerando o efeito combinado das duas variáveis.
Em suma, o efeito líquido da vazão na taxa de penetração depende da soma de dois
efeitos antagônicos. Seu aumento geralmente leva a uma melhora da taxa de penetração, mas o
contrário também pode ocorrer, dependendo das condições do processo (ARAGÃO et al, 2005).
3.3.4 PROFUNDIDADE VERTICAL (TVD – TRUE VERTICAL DEPTH)
Quanto maior a profundidade vertical do poço, maior é o peso exercido sobre as
camadas geológicas e mais compactadas estarão as rochas. Assim, as rochas localizadas em
regiões mais profundas tenderão a exigir uma energia maior para serem perfuradas. Em outras
palavras, o aumento da profundidade geralmente torna as rochas mais difíceis de serem
perfuradas. Desta forma, à medida que a profundidade vertical do poço aumenta, é esperada
uma redução na taxa de penetração, mantendo-se constante os demais parâmetros operacionais
(BOURGOYNE, 2001).
3.3.5 LITOLOGIA DO POÇO
A litologia, junto com rotação e peso sobre broca, é um dos fatores que mais influenciam
a taxa de penetração. De fato, a litologia é a variável que mais afeta o ROP. Diferentes litologias
requerem diferentes valores de energia para serem perfurados. Por exemplo, arenitos e folhelhos
são rochas relativamente fáceis de serem perfuradas. Já margas e carbonatos albianos costumam
apresentar uma dificuldade grande durante a perfuração.
Evidentemente, a litologia não é uma variável que se possa manipular para o controle
da taxa. Assim, este parâmetro é uma importante entrada de qualquer modelo para previsão de
ROP e os demais parâmetros manipuláveis (RPM e WOB) deverão ter seus valores alterados
de forma a manter a taxa de penetração no setpoint e anular as perturbações causadas pelas
mudanças de formação (MOHRIAK et al, 2009).
34
3.3.6 PRESSÃO DIFERENCIAL DO POÇO (OVERBALANCE)
Todas as formações geológicas perfuradas contêm fluidos (gases ou líquidos) em seus
poros e, consequentemente, têm uma “pressão de poros”. Conforme citado anteriormente,
durante a perfuração de um poço, a pressão no mesmo deve ser mantida acima da pressão de
poros para evitar o influxo dos fluidos nativos para dentro do poço, pois isso representa um
sério risco operacional. Assim, em uma perfuração convencional, existe sempre um diferencial
positivo de pressão entre o poço e as formações perfuradas, também chamado de overbalance
(THOMAS, 2001).
Quanto maior for o diferencial de pressão entre poço e formação, maior será a pressão
mantendo os sólidos recém (ou prestes a serem) perfurados aderidos à parede do poço. Logo,
quanto maior for o overbalance, maior será a dificuldade de a broca cortar as formações. O
overbalance também não é uma variável que se possa manipular para o controle da ROP. O
overbalance aplicado no poço é determinado em projeto e leva em conta questões de segurança
de poço, integridade das formações e do reservatório (WALDMANN, 2005).
3.3.7 TEMPO DE TRÂNSITO
O tempo de trânsito é uma variável extremamente importante e útil para a estimativa da
perfurabilidade (facilidade em se perfurar) de uma rocha. Uma formação geológica será tão
mais fácil de se perfurar quanto menos densa e compactada for. O tempo de trânsito é uma
medida obtida por uma ferramenta chamada “sônico”, que é posicionada logo acima da broca.
A ferramenta de sônico emite uma onda sonora que se propaga pelas formações
geológicas. A própria ferramenta mede a velocidade de propagação da onda. Quanto mais densa
for a formação, mais rapidamente a onda se propagará, ou seja, menor será o tempo de trânsito.
Assim, geralmente, quanto menor o tempo de trânsito de uma determinada rocha, mais difícil
será sua perfuração (BOURGOYNE, 2001).
O problema do uso desta informação é que na grande maioria dos poços não se faz uso
da ferramenta de sônico e, portanto, esta informação não está disponível. Mesmo naqueles
poços em que a ferramenta de sônico está presente, estes dados não são disponibilizados em
tempo real, servindo apenas para fins de retro análises.
35
3.3.7 COMPOSIÇÃO DA COLUNA DE PERFURAÇÃO
A composição da coluna de perfuração é um ponto chave no projeto de qualquer poço
de petróleo. A eficiência da coluna em transmitir energia à broca é função da quantidade de
cada um destes elementos e de suas posições. Uma coluna composta apenas por tubos de
perfuração seria extremamente flexível e apresentaria má eficiência na transmissão de energia
à broca. Já uma coluna composta apenas por comandos, seria muito rígida e apresentaria alta
eficiência na transmissão de energia à broca, mas geraria uma pressão de bombeio proibitiva e
impossibilitaria a construção de poços direcionais (ROCHA et al, 2007).
As quantidades de comandos, tubos pesados e tubos de perfuração devem ser definidas
de forma a maximizar a transmissão de peso sobre broca e minimizar a perda de carga. A
composição ideal de uma coluna de perfuração depende de uma série de fatores, tais como
profundidade final e geometria do poço e quanto peso se espera aplicar à broca durante a
perfuração. Uma coluna de perfuração mal projetada gerará muita flambagem, o que reduz o
peso efetivo aplicado à broca e, consequentemente, reduz a taxa de penetração (BOURGOYNE,
2001).
3.3.8 DIÂMETRO DA BROCA
O diâmetro da broca (ou diâmetro da fase de perfuração) é outro fator que tem influência
direta sobre a taxa de penetração. Um poço de petróleo é perfurado em fases de diâmetros cada
vez menores. Quando se aplica um peso sobre a broca, o mesmo é transmitido à formação
através da área de contato entre a broca e a mesma. Assim, quanto maior for o diâmetro da
broca, menor será a pressão aplicada à formação. Ou seja, para um mesmo valor de peso sobre
broca, quanto menor for o diâmetro da fase, mais facilmente as formações geológicas serão
perfuradas (maior será a ROP) (AADNOY et al, 2009).
Apesar de ter grande influência na ROP, não se pode manipular o diâmetro da broca
para o controle da taxa de penetração, uma vez que este diâmetro é definido, em projeto, com
base em uma série de outros pontos tais como, janela operacional, extensão de cada fase,
profundidade final do poço, tipo de óleo e de reservatório, etc (ROCHA et al, 2007).

36
3.4 GENERALIZAÇÕES SOBRE O ROP A PARTIR DE EXPERIÊNCIAS EM
POÇOS DE CORRELAÇÃO DA REGIÃO ESTUDADA
É comum e altamente aplicado o estudo dos poços de correlação para ter o conhecimento
da região, e levar em consideração as experiências adquiridas para perfuração dos poços
vizinhos. Portanto, são feitas generalizações baseadas em dados extraídos de poços já
perfurados de forma a aplicar as “lições aprendidas” nos próximos poços correlacionados. Para
os poços estudados, baseados em outros poços de correlação, as taxas de penetração
recomendadas estão representadas na tabela 3.2.
Tabela 3.2 – Taxas de penetração recomendadas para cada fase de perfuração.
Diâmetro da Fase Taxa de penetração
16” 24 m/h
12 ¼” 40 m/h
8 ½” 30 m/h
A fase de 16” dos poços estudados, representada na Figura 3.12, possui em média
1550 m de extensão e foi iniciada com peso de lama mais baixo que o programado, visando
minimizar o efeito do ECD x LOT (Equivalent Circulation Density e Leak-off Test) no início
da fase (9.5ppg), onde as taxas de penetração são maiores. Para esta fase, foi obtido um ROP
efetivo de broca a fundo de 30,6m/h, porém, a taxa média variou bastante devido a alguns
pontos de queda. Em média, até 1950m de profundidade a litologia da área foi homogênea, de
fácil penetração. A partir desse ponto, foi observado algumas intercalações de formações,
acarretando no aumento de torque, sendo necessário trabalhar a coluna de perfuração para
atravessar esses pontos. Foi possível trabalhar com alta vazão (1000 gpm) colaborando com o
condicionamento poço, atingindo um arraste (drag) praticamente nulo após o bombeamento de
tampões.

37
Figura 3.12 – Esquemático da fase de 16” de um poço de correlação. (Figura adaptada)
A fase de 12 ¼” com alargador de 14 ¾” dos poços estudados, representada na Figura
3.13, possui extensão média de 720 m. No início da perfuração da fase, o ROP esteve acima do
previsto por um período. Na região de aproximadamente 3400 m foram observadas lentes muito
duras de arenito, acarretando uma grande queda na taxa. Ao atingir a camada de sal,
considerando a plasticidade desse tipo de formação, o peso de lama foi incrementado para
10,2ppg. Durante perfuração da camada de sal, o peso do fluido foi aumentado, conforme a
necessidade do momento, porém, respeitando os limites de ECD e LOT chegando ao máximo
de 11 ppg. A perfuração do intervalo salino requer cuidados específicos, como repasses
preventivos devido ao fechamento inicial da formação, para prevenir prisões da coluna de
perfuração. Após o ponto em 3650 m, em média, obteve-se uma boa taxa de penetração, sem
observar nenhum drag significativo.

38
Figura 3.13 – Esquemático da fase de 12 ¼” de um poço de correlação. (Figura adaptada)
A fase de 8 ½” é a fase final da perfuração dos poços estudados, com extensão de 450m
em média (Figura 3.14). Nesta fase, tem-se a maior inclinação e menor diâmetro do poço, sendo
necessário tomar certos cuidados, como por exemplo, descer a coluna lentamente quando os
estabilizadores passarem pela sapata, para evitar risco de prisão. Nesta fase foi recomendado
perfurar com vazões maiores que 500 gpm a fim de diminuir o risco de “packer hidráulico” e
“fundo falso”. O ROP apresentado nesta fase, foi praticamente dentro da média projetada, sem
maiores problemas.
Figura 3.14 – Esquemático da fase de 8 ½” de um poço de correlação. (Figura adaptada)
39
4. REDES NEURAIS ARTIFICIAIS (RNA)
4.1 INTRODUÇÃO
Entender o funcionamento do cérebro humano e construir uma máquina que possa
reproduzir suas habilidades, ainda que parcialmente, tem sido o sonho de gerações de
pesquisadores. O cérebro processa as informações de forma totalmente diferente de um
computador digital convencional. O cérebro é um computador altamente complexo, não-linear
e paralelo, com a capacidade de organizar seus constituintes estruturais, os neurônios, de forma
a realizar o processamento mais rapidamente que o mais rápido computador digital hoje
existente (HAYKIN, 2001).
As RNAs são modelos matemáticos que se assemelham às estruturas neurais biológicas
e que têm capacidade computacional adquirida por meio de aprendizagem e generalização
(BRAGA et al., 2007). Esses modelos almejam semelhança com o sistema nervoso dos seres
vivos e a com sua capacidade de processar informações. Trata-se de uma metáfora da maneira
como o cérebro humano processa as informações utilizadas em computação.
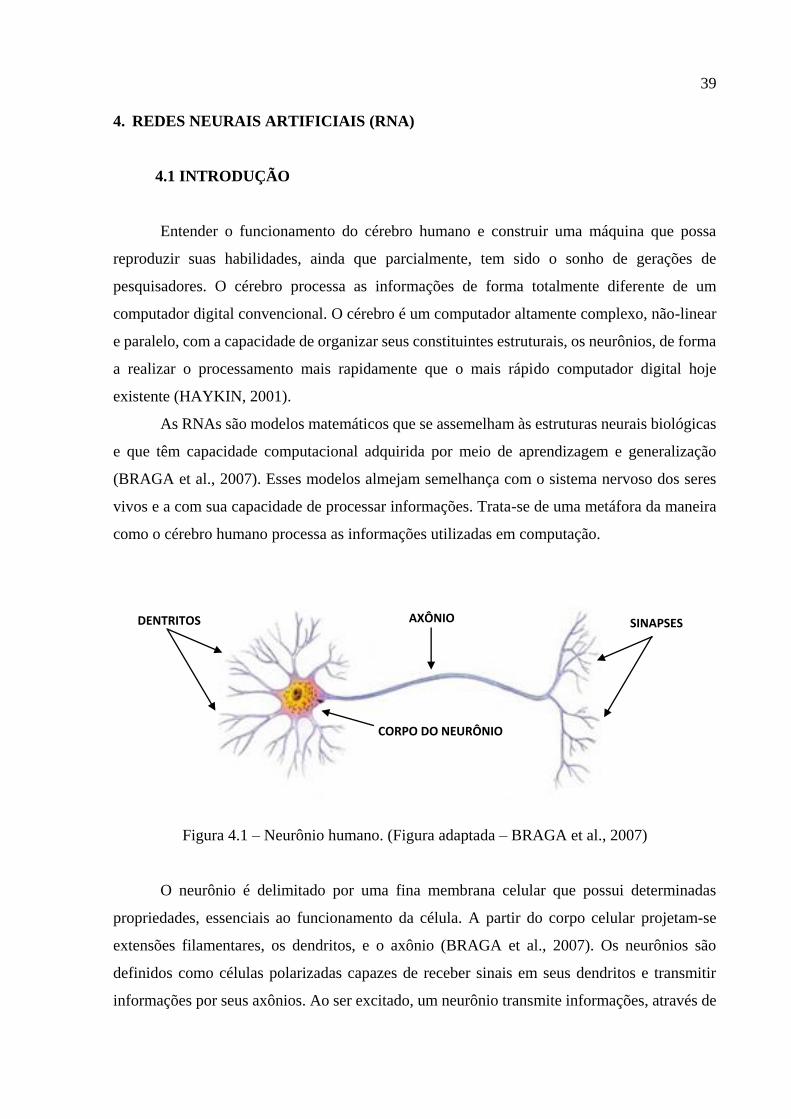
Figura 4.1 – Neurônio humano. (Figura adaptada – BRAGA et al., 2007)
O neurônio é delimitado por uma fina membrana celular que possui determinadas
propriedades, essenciais ao funcionamento da célula. A partir do corpo celular projetam-se
extensões filamentares, os dendritos, e o axônio (BRAGA et al., 2007). Os neurônios são
definidos como células polarizadas capazes de receber sinais em seus dendritos e transmitir
informações por seus axônios. Ao ser excitado, um neurônio transmite informações, através de
DENTRITOS AXÔNIO
CORPO DO NEURÔNIO
SINAPSES

40
impulsos, chamados potenciais de ação, para outros neurônios. Estes sinais são propagados
como ondas pelo axônio da célula e convertidos para sinais químicos nas sinapses.
O neurônio biológico, representado na Figura 4.1, pode ser visto como o dispositivo
computacional elementar do sistema nervoso, composto de muitas entradas e saídas. As
entradas são formadas através das conexões sinápticas que conectam os dendritos aos axônios
de outras células nervosas. Os sinais que chegam por estes axônios são pulsos elétricos
conhecidos como impulsos nervosos ou potenciais de ação e constituem a informação que o
neurônio processa para produzir como saída um impulso nervoso no seu axônio.
Dependendo dos sinais enviados pelos axônios, as sinapses podem ser excitatórias ou
inibitórias. Uma conexão excitatória contribui para a formação de um impulso nervoso no
axônio de saída, enquanto uma sinapse inibitória age no sentido contrário (BRAGA et al.,
2007).
A partir do conhecimento da estrutura e do comportamento dos neurônios naturais foram
extraídas suas características fundamentais, utilizadas na criação de modelos de neurônios
artificiais que simulam os reais. Estes neurônios artificiais são utilizados na formação das
RNAs, se compondo em seus principais elementos de processamento.
As Redes Neurais Artificiais foram criadas por McCulloch e Pitts (HAYKINS, 2001)
baseada no funcionamento de um neurônio natural. Suas principais características são:
Possibilidade de considerar o comportamento não linear dos fenômenos físicos;
Necessidade de pouco conhecimento estatístico sobre o ambiente onde a rede está
inserida;
Capacidade de aprendizagem, obtida através de exemplos entrada/saída que sejam
representativos do ambiente;
Habilidade de aproximar qualquer mapeamento entrada/saída de natureza contínua;
Adaptabilidade;
Generalização;
Tolerância a falhas;
Informação contextual;
Armazenamento do conhecimento adquirido, através de forças de conexão entre
neurônios, conhecidas como pesos sinápticos.

41
O elemento básico que forma uma RNA é o neurônio artificial, conhecido também por
nó ou elemento processador, como mostra a figura 4.2.
Figura 4.2 – Modelo de um Neurônio Artificial. (Fonte: HAYKIN, 2001)
Na estrutura do modelo de neurônio artificial, podemos identificar três elementos
básicos, são eles:
Sinapse: Conexão caracterizada por um “peso” ou “força própria”. Uma sinapse n,
que está conectada a um neurônio K, recebe um sinal Xn que por sua vez é
multiplicado pelo peso sináptico WKn. No caso de modelagem de neurônios
artificiais, os valores dos pesos podem ser também negativos se as sinapses forem
inibitórias, ou positivos, se as sinapses forem excitatórias. Os pesos sinápticos têm
a função de determinar a importância dos sinais de determinada região.
Somador: Combinador linear, que realiza o somatório das entradas do neurônio,
ponderadas pela ação dos respectivos pesos sinápticos.
Função de Ativação: Função que restringe a amplitude do sinal de saída ao
condicionar a ativação do sinal à ultrapassagem de um determinado limiar pelo
valor da soma ponderada das entradas. Os intervalos típicos de normalização de
saída são [0,1] e [-1,1].
X1
X2
Xn
Entrada
WK1
WK2
WKn
BK Bias
Σ Somador
VK
Função de Ativação
F(VK) YK
Saída
. . .
. . .

42
Bias: Complementarmente, o bias tem aplicação externa e com a capacidade de
aumentar ou diminuir a entrada da função de ativação (HAYKIN, 2001).
Matematicamente, um neurônio pode ser descrito como:
𝑌𝐾 = 𝐹(𝑉𝐾 + 𝐵𝐾) (4.1)
Onde:
𝑉𝐾 =∑𝑊𝐾𝑗 ∙ 𝑋𝑗 (4.2)
𝑛
𝑗=1
Onde:
𝑋1, 𝑋2, 𝑋3, … , 𝑋𝑛 Vetor de entrada.
𝑊𝐾1,𝑊𝐾2,𝑊𝐾3, … ,𝑊𝐾𝑛 Pesos sinápticos do neurônio K.
𝑉𝐾 Saída do combinador linear (Somador).
𝐵𝐾 Bias.
𝐹(𝑉𝐾) Função de ativação.
𝑌𝐾 Saída do neurônio K.
A função de ativação F(VK) define a saída de um neurônio em termos do campo induzido
V. Podemos citar quatro tipos básicos de função de ativação: linear, limiar, rampa (linear por
partes) e sigmoidal:
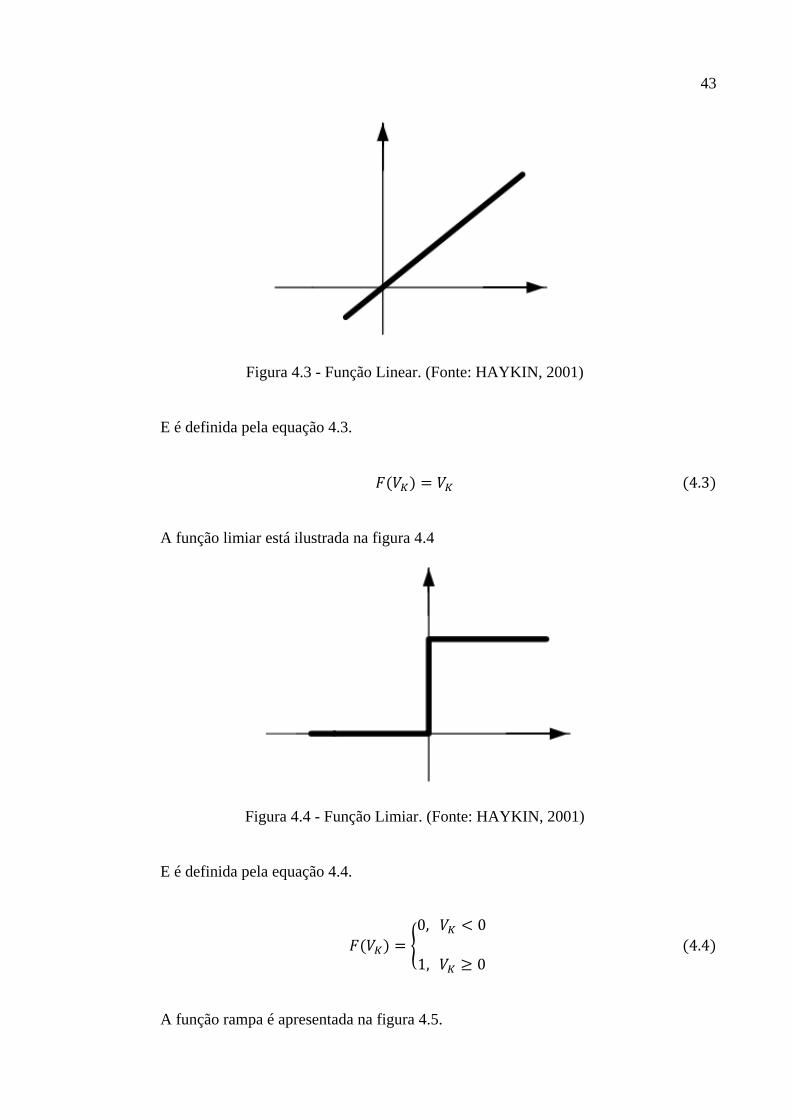
A função linear está ilustrada na figura 4.3.
43
Figura 4.3 - Função Linear. (Fonte: HAYKIN, 2001)
E é definida pela equação 4.3.
𝐹(𝑉𝐾) = 𝑉𝐾 (4.3)
A função limiar está ilustrada na figura 4.4
Figura 4.4 - Função Limiar. (Fonte: HAYKIN, 2001)
E é definida pela equação 4.4.
𝐹(𝑉𝐾) = {
0, 𝑉𝐾 < 0
1, 𝑉𝐾 ≥ 0 (4.4)
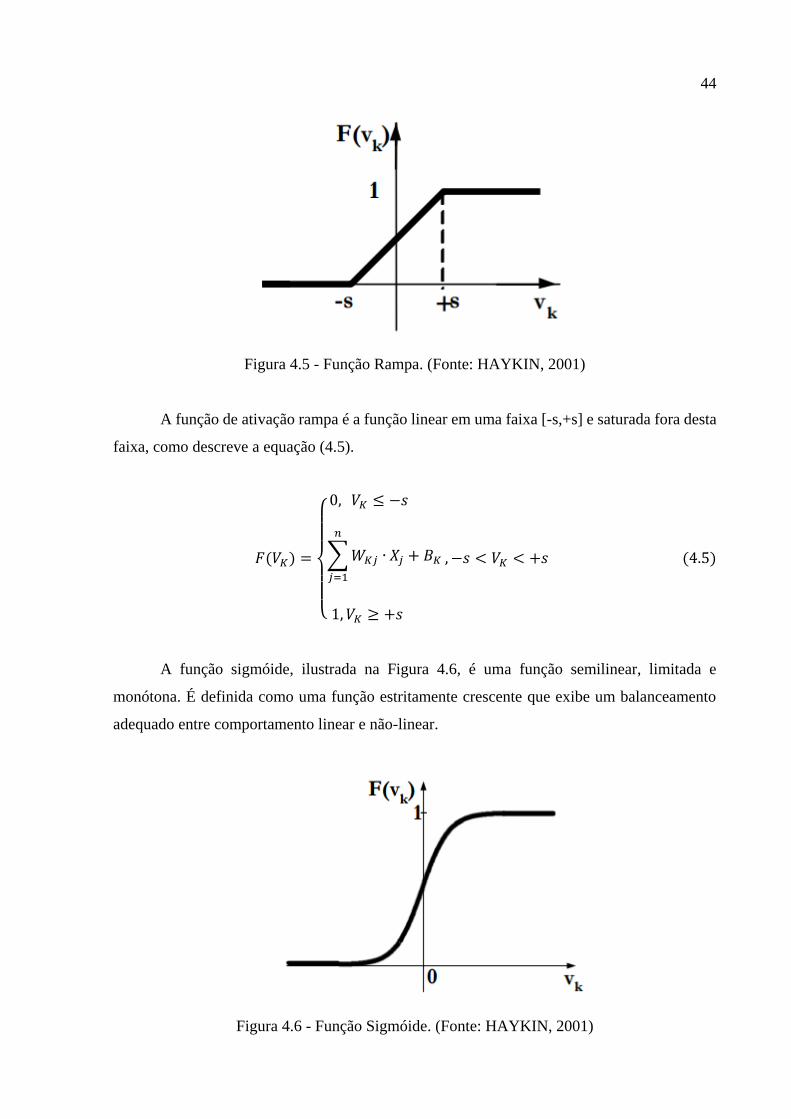
A função rampa é apresentada na figura 4.5.
44
Figura 4.5 - Função Rampa. (Fonte: HAYKIN, 2001)
A função de ativação rampa é a função linear em uma faixa [-s,+s] e saturada fora desta
faixa, como descreve a equação (4.5).
𝐹(𝑉𝐾) =
{
0, 𝑉𝐾 ≤ −𝑠
∑𝑊𝐾𝑗 ∙ 𝑋𝑗 + 𝐵𝐾
𝑛
𝑗=1
1, 𝑉𝐾 ≥ +𝑠
, −𝑠 < 𝑉𝐾 < +𝑠 (4.5)
A função sigmóide, ilustrada na Figura 4.6, é uma função semilinear, limitada e
monótona. É definida como uma função estritamente crescente que exibe um balanceamento
adequado entre comportamento linear e não-linear.
Figura 4.6 - Função Sigmóide. (Fonte: HAYKIN, 2001)
45
Um exemplo de função sigmoidal é a função logística, definida pela equação 4.6.
𝐹(𝑉𝐾) =1
1 + 𝑒−𝑉𝐾𝑇
(4.6)
Onde T determina a inclinação da sigmóide. Quando T tende a zero, a função assume
características de uma função limiar. Quando é desejável que a função de ativação tenha uma
forma anti-simétrica em relação à origem, assumindo assim valores entre [-1,+1], pode-se
utilizar, por exemplo, a função tangente hiperbólica (HAYKIN, 2001).
4.2 ARQUITETURAS DE REDES NEURAIS ARTIFICIAIS
A escolha de uma determinada arquitetura de RNA dependerá do tipo de problema que
será tratado pela rede, bem como o algoritmo de treinamento que será utilizado de acordo com
a arquitetura definida.
Na escolha da estrutura a ser utilizada são analisados: número de camadas, número de
nós, tipo de conexões entre os nós e a topologia da rede. Em geral, podemos identificar três
tipos básicos de arquiteturas: Redes diretas de camada simples, Redes diretas de camadas
múltiplas (Feedforward) e Redes recorrentes (Feedbackward).
4.2.1 REDES DIRETAS DE CAMADA SIMPLES
São redes neurais constituídas por apenas um agrupamento de neurônios que recebem
informação simultaneamente. Este agrupamento recebe o nome de camada. Esse tipo de rede
também é acíclica, ou seja, não possui laços de realimentação. Como pode ser observado na
Figura 4.7, há uma camada de nós de fonte que recebem sinais de excitação do meio externo e
estes se conectam com a camada de neurônios, que por sua vez, ligam-se aos nós de saída da
rede (HAYKIN, 2001).

46
Figura 4.7 – Diagrama de uma rede direta de camada simples. (Fonte: WIDROW, 1994)
Esse tipo de rede é utilizado em telecomunicações, onde modems de alta velocidade de
transmissão utilizam equalizadores adaptativos de linha e canceladores adaptativos de eco.
Cada um desses sistemas adaptativos utiliza uma rede neural (WIDROW, 1994).
4.2.2 REDES DIRETAS DE CAMADAS MÚLTIPLAS (FEEDFORWARD)
Também chamadas de Perceptron de Múltiplas Camadas (MLP – Multi-Layer
Perceptron), são redes que possuem fluxo de informação unidirecional, porém, neste caso, há
presença de camadas ocultas, cujos nós computacionais são chamados de neurônios ocultos.
Devido ao conjunto extra de conexões sinápticas e da riqueza de interações neurais, as camadas
ocultas são capazes de extrair características complexas do ambiente em que atuam (HAYKIN,
2001).
Nas redes de múltiplas camadas, como a mostrada na Figura 4.8, cada camada tem uma
função específica. A camada de saída final recebe os estímulos da camada intermediária e
constrói a resposta global para o padrão de ativação fornecido pelos nós de fonte da camada de
entrada. As camadas intermediárias funcionam como extratoras de características, codificando
através de seus pesos as características apresentadas nos padrões de entrada, fazendo com que
a rede crie uma representação própria do problema, com mais riqueza e complexidade
(REZENDE, 2003).
47
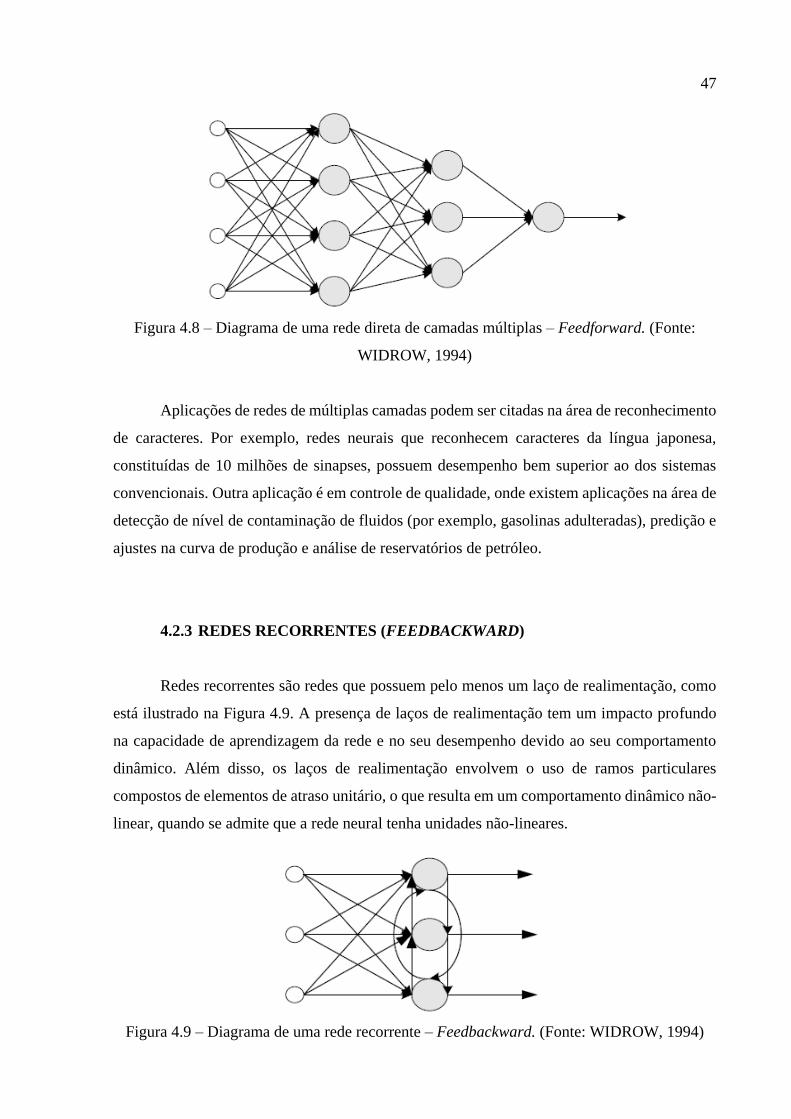
Figura 4.8 – Diagrama de uma rede direta de camadas múltiplas – Feedforward. (Fonte:
WIDROW, 1994)
Aplicações de redes de múltiplas camadas podem ser citadas na área de reconhecimento
de caracteres. Por exemplo, redes neurais que reconhecem caracteres da língua japonesa,
constituídas de 10 milhões de sinapses, possuem desempenho bem superior ao dos sistemas
convencionais. Outra aplicação é em controle de qualidade, onde existem aplicações na área de
detecção de nível de contaminação de fluidos (por exemplo, gasolinas adulteradas), predição e
ajustes na curva de produção e análise de reservatórios de petróleo.
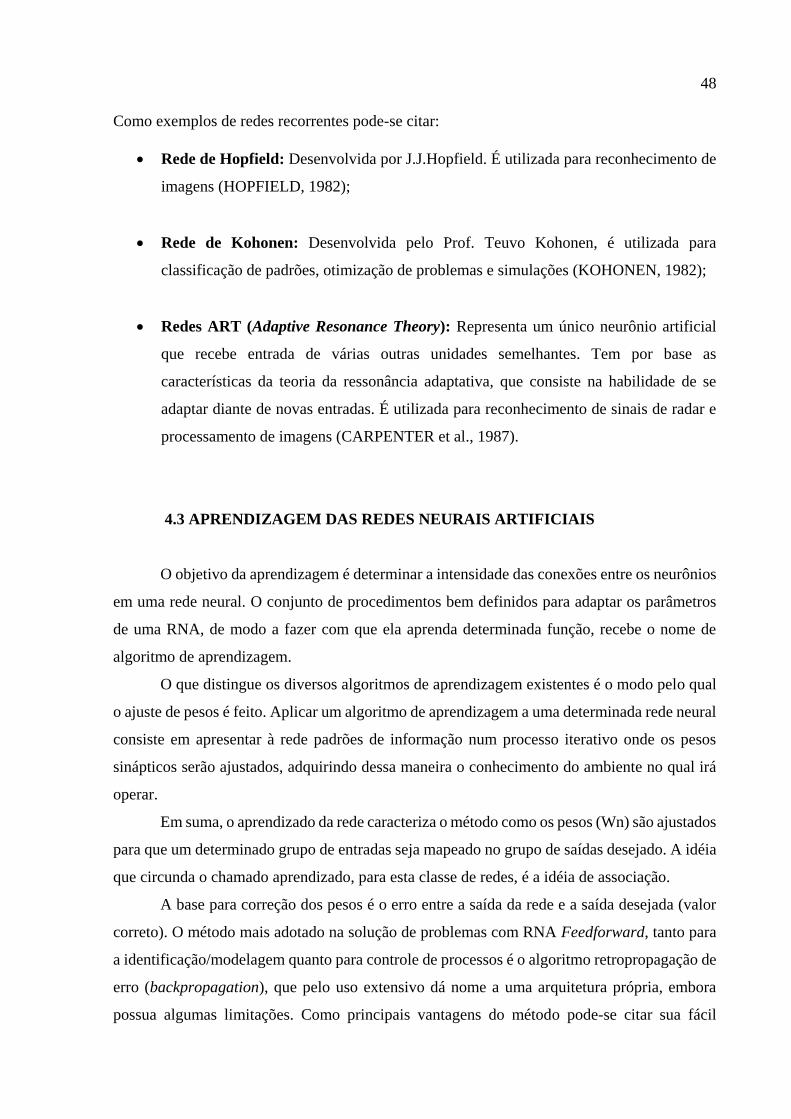
4.2.3 REDES RECORRENTES (FEEDBACKWARD)
Redes recorrentes são redes que possuem pelo menos um laço de realimentação, como
está ilustrado na Figura 4.9. A presença de laços de realimentação tem um impacto profundo
na capacidade de aprendizagem da rede e no seu desempenho devido ao seu comportamento
dinâmico. Além disso, os laços de realimentação envolvem o uso de ramos particulares
compostos de elementos de atraso unitário, o que resulta em um comportamento dinâmico não-
linear, quando se admite que a rede neural tenha unidades não-lineares.
Figura 4.9 – Diagrama de uma rede recorrente – Feedbackward. (Fonte: WIDROW, 1994)
48
Como exemplos de redes recorrentes pode-se citar:
Rede de Hopfield: Desenvolvida por J.J.Hopfield. É utilizada para reconhecimento de
imagens (HOPFIELD, 1982);
Rede de Kohonen: Desenvolvida pelo Prof. Teuvo Kohonen, é utilizada para
classificação de padrões, otimização de problemas e simulações (KOHONEN, 1982);
Redes ART (Adaptive Resonance Theory): Representa um único neurônio artificial
que recebe entrada de várias outras unidades semelhantes. Tem por base as
características da teoria da ressonância adaptativa, que consiste na habilidade de se
adaptar diante de novas entradas. É utilizada para reconhecimento de sinais de radar e
processamento de imagens (CARPENTER et al., 1987).
4.3 APRENDIZAGEM DAS REDES NEURAIS ARTIFICIAIS
O objetivo da aprendizagem é determinar a intensidade das conexões entre os neurônios
em uma rede neural. O conjunto de procedimentos bem definidos para adaptar os parâmetros
de uma RNA, de modo a fazer com que ela aprenda determinada função, recebe o nome de
algoritmo de aprendizagem.
O que distingue os diversos algoritmos de aprendizagem existentes é o modo pelo qual
o ajuste de pesos é feito. Aplicar um algoritmo de aprendizagem a uma determinada rede neural
consiste em apresentar à rede padrões de informação num processo iterativo onde os pesos
sinápticos serão ajustados, adquirindo dessa maneira o conhecimento do ambiente no qual irá
operar.
Em suma, o aprendizado da rede caracteriza o método como os pesos (Wn) são ajustados
para que um determinado grupo de entradas seja mapeado no grupo de saídas desejado. A idéia
que circunda o chamado aprendizado, para esta classe de redes, é a idéia de associação.
A base para correção dos pesos é o erro entre a saída da rede e a saída desejada (valor
correto). O método mais adotado na solução de problemas com RNA Feedforward, tanto para
a identificação/modelagem quanto para controle de processos é o algoritmo retropropagação de
erro (backpropagation), que pelo uso extensivo dá nome a uma arquitetura própria, embora
possua algumas limitações. Como principais vantagens do método pode-se citar sua fácil

49
implementação e dedução, apresentando um paralelismo inerente às redes neurais, além de
produzir bons resultados em diversas aplicações. Em contrapartida, esta metodologia tem sérios
problemas de convergência por mínimos locais, é lenta no período de treinamento e possui uma
certa dificuldade em se estabelecer o número de neurônios que cada camada intermediária de
uma RNA Feedforward deve conter (HAYKIN, 2001).
Figura 4.10 – Diagrama de uma Rede Neural Artificial. (Fonte: HAYKIN, 2001)
Na Figura 4.11 é apresentado o fluxograma do ciclo de execução para o ajuste de pesos,
baseado no exemplo da Figura 4.10.
Figura 4.11 - Ciclo de execução do ajuste dos pesos sinápticos. (BRAGA et al., 2007)
50
4.4 A REDE NEURAL IMPLEMENTADA PARA A PREDIÇÃO DE ROP
Neste trabalho foi implementado uma Rede Neural FeedForward (Multilayer
Perceptron - MLP) para a predição de ROP em poços de correlação. Para o treinamento da
RNA, foi utilizado o algoritmo backpropagation de Levenberg-Marquardt. A seguir será
descrito detalhadamente o tipo de RNA e o algoritmo de treinamento utilizados.
4.4.1 PERCEPTRON DE MÚLTIPLAS CAMADAS (MLP)
Uma rede neural artificial perceptron de múltiplas camadas possui um conjunto de
unidades sensoriais que formam a camada de entrada, uma ou mais camadas ocultas ou
intermediárias de neurônios computacionais e uma camada de saída. Esse tipo de RNA é
totalmente conectada, ou seja, todos os neurônios de qualquer camada estão conectados a todos
os neurônios da camada anterior (HAYKIN, 2001).
Por padrão, o treinamento de uma MLP é do tipo supervisionado por meio de algoritmo
backpropagation (retropropagação do erro), que tem a função de encontrar as derivadas da
função de erro com relação aos pesos e bias da RNA. A função de erro calcula a diferença entre
a saída fornecida pela RNA e a saída desejada em relação a um determinado padrão de entrada
(BISHOP, 1995)
O algoritmo backpropagation é constituído de duas etapas. Na primeira, chamada
forward, um padrão de entrada é apresentado à RNA e seu efeito é propagado, camada a
camada, até produzir um conjunto de saídas, que correspondem a resposta em relação ao padrão
de entrada. Na segunda etapa, conhecida como backward, são calculadas as derivadas da função
de erro com respeito aos pesos da RNA. O sinal do erro é propagado da camada de saída para
a camada de entrada. Tal sinal corresponde à diferença entre a saída real na etapa forward em
relação a saída desejada (HAYKIN, 2001).
Também é importante destacar que na etapa forward os pesos sinápticos são mantidos
fixos, ao passo que na backward os pesos são ajustados de acordo com algum método de
otimização, sendo que um dos mais populares é o método do gradiente descendente (BRAGA
et al., 2007). O ajuste é realizado para que a saída da RNA se aproxime da saída desejada,
diminuindo o valor do sinal de erro.
O algoritmo backpropagation pode ser resumido nos seguintes passos (LIU, 2010):

51
1. Inicialização: nessa etapa os pesos e o bias da RNA devem ser inicializados. Uma
das formas de realizar esse procedimento é usar aleatoriamente valores de uma distribuição
uniforme que esteja no intervalo entre 0 e 1, considerando que a função de ativação a ser
utilizada será a função sigmoidal;
2. Apresentação dos padrões de treinamento: um conjunto de padrões de treinamento
(época) deve ser apresentado à RNA. Para cada padrão são realizados os passos forward e
backward;
3. Etapa forward: suponha que um exemplo de treinamento seja representado por (x(n),
d(n)), onde x(n) é um padrão de entrada e d(n) é a saída desejada. Então, o sinal é propagado
pela RNA, camada a camada da seguinte forma:
𝑢𝑗𝑙(𝑛) = ∑ 𝑤𝑗𝑖
𝑙 (𝑛)𝑦𝑖𝑙−1(𝑛) (4.7)
𝑚𝑙−1
𝑖=0
Sendo l = 0, 1, 2, ..., L o índice das camadas da RNA. Quando l = 0, representa a camada
de entrada e l = L, a camada de saída. Já, 𝑦𝑖𝑙−1(𝑛) é a função de saída do neurônio i na camada
anterior l − 1, 𝑤𝑗𝑖𝑙 (𝑛) é o peso sináptico do neurônio j na camada l e ml é a quantidade de
neurônios na camada l. Para i = 0, 𝑦0𝑙−1(𝑛) = +1 e 𝑤𝑗0
𝑙 (𝑛) representa o bias aplicado ao neurônio
j da camada l. A saída do neurônio j na camada l é dada por:
𝑦𝑗𝑙(𝑛) = 𝜑𝑗 (𝑢𝑗
𝑙(𝑛)) (4.8)
Onde φj é a função de ativação do neurônio j. Agora, o erro deve ser calculado da
seguinte forma:
𝑒𝑗𝑙(𝑛) = 𝑦𝑗
𝑙(𝑛) − 𝑑(𝑛) (4.9)
Sendo que d(n) é a saída desejada para o padrão de entrada x(n);

52
4. Etapa backward: nessa etapa, inicia-se a derivação do algoritmo backpropagation, a
partir da camada de saída, onde tem-se:
𝛿𝑗𝐿(𝑛) = 𝜑𝑗
′ (𝑢𝑗𝐿(𝑛)) 𝑒𝑗
𝐿(𝑛) (4.10)
Sendo 𝜑𝑗′ a derivada da função de ativação. Para l = L, L − 1, ..., 2, calcula-se:
𝛿𝑗𝑙−1(𝑛) = 𝜑𝑗
′ (𝑢𝑗𝑙−1(𝑛))∑𝑤𝑗𝑖
𝑙 (𝑛) ∗ 𝛿𝑗𝑙(𝑛)
𝑚𝑙
𝑖=1
(4.11)
Para j = 0, 1, ..., ml − 1.
Agora os pesos sinápticos podem ser atualizados da seguinte forma:
𝑤𝑗,𝑖𝑙 (𝑛 + 1) = 𝑤𝑗,𝑖
𝑙 (𝑛) − 𝛼𝛿𝑗𝑙−1(𝑛)𝑦𝑗
𝐿(𝑛) (4.12)
Onde α é o parâmetro que define o tamanho do passo de aprendizagem;
5. Repetição dos passos 3 e 4 para todos os padrões de treinamento, completando uma
época de treinamento;
6. Retorno ao passo 3 e repetição até que o critério de parada seja satisfeito.
Um dos critérios de paradas mais comuns para a MLP e outros tipos de RNAs é o
número de épocas de treinamento (HAYKIN, 2001). A execução do algoritmo também pode
ser interrompida quando a RNA atingir um valor mínimo de erro, que pode ser calculado pela
seguinte equação:
𝐸𝑄𝑀 =1
𝑛𝑒𝑇𝑒 (4.13)
Sendo n o número de padrões de entrada e e um vetor que armazena o erro relativo a
todos os padrões de entrada da RNA. O valor encontrado por essa equação é chamado de "erro
quadrático médio" (EQM). Outro critério de parada é a validação cruzada. Essa técnica evita a
ocorrência de overfitting, estimando o erro de generalização da RNA durante o processo de
treinamento (BRAGA et al., 2007). O overfitting ocorre quando a RNA memoriza os padrões
53
de treinamento em vez de extrair características gerais para ser eficiente na generalização dos
padrões, ou seja, para acertar padrões que a RNA não viu durante o processo de treinamento.
Dessa forma, na validação cruzada, o conjunto de padrões é dividido de forma aleatória em
conjunto de treinamento e conjunto de validação. O primeiro é utilizado para treinar a RNA e
o segundo é usado para calcular a capacidade de generalização da RNA durante o processo de
aprendizagem. Logo, o processo de treinamento é interrompido quando o erro do conjunto de
validação começar a aumentar (BISHOP, 1995). Tal erro também pode ser calculado pela
Equação 4.13.
4.4.2 ALGORITMO DE TREINAMENTO DE LEVENBERG-MARQUARDT
O algoritmo Levenberg-Marquardt é um método de otimização e aceleração da
convergência do algoritmo backpropagation, sendo mais poderoso do que a técnica
convencional do gradiente descendente [9]. É considerado um método de segunda ordem, assim
como os métodos do gradiente conjugado, pois utiliza informações sobre a derivada segunda
da função de erro. Além disso, o algoritmo de Levenberg-Marquardt pode tornar-se
computacionalmente impraticável em RNAs muito grandes.
Porém, é mais eficiente do que método do gradiente conjugado em RNAs com algumas
centenas de pesos e possui menor custo computacional do que o método quase-Newton [20].
Segundo Liu [25], o algoritmo de Levenberg-Marquardt propõe uma solução de compromisso
entre o algoritmo do gradiente descendente e o método iterativo de Gauss-Newton,
incorporando a velocidade de convergência de uma RNA de segunda ordem.
Considerando que a função de erro usada na MLP é dada pelo EQM (Equação 4.13), a
equação usada no método de Gauss-Newton para atualização dos pesos da RNA e consequente
minimização do valor do EQM é:
𝑊𝑖+1 = 𝑊1 − 𝐻−1∇𝑓(𝑊) (4.14)
O gradiente ∇𝑓(𝑊) pode ser representado por:
∇𝑓(𝑊) = 𝐽𝑇𝑒 (4.15)
A matriz Hessiana pode ser calculada por:

54
∇2𝑓(𝑊) = 𝐽𝑇𝐽 + 𝑆 (4.16)
Onde J é a matriz Jacobiana.
𝐽 =
[
𝜕𝑒1𝜕𝑥1
𝜕𝑒1𝜕𝑥2
⋯𝜕𝑒1𝜕𝑥𝑛
𝜕𝑒2𝜕𝑥1
𝜕𝑒2𝜕𝑥2
…𝜕𝑒2𝜕𝑥𝑛
⋮ ⋮ ⋱ ⋮
𝜕𝑒𝑛𝜕𝑥1
𝜕𝑒𝑛𝜕𝑥2
⋯𝜕𝑒𝑛𝜕𝑥𝑛
]
(4.17)
O xi é o i-ésimo padrão de entrada da RNA e:
𝑆 =∑𝑒𝑖∇2𝑒𝑖 (4.18)
𝑛
𝑖=1
Pode-se supor que S é um valor pequeno, se comparado ao produto da matriz Jacobiana,
logo, a matriz Hessiana pode ser representada por:
∇2𝑓(𝑊) ≈ 𝐽𝑇𝐽 (4.19)
Diante disso, a atualização dos pesos no método de Gauss-Newton apresentado na
Equação (4.12) pode ser expressada por:
𝑊𝑖+1 = 𝑊𝑖 − ( 𝐽𝑇𝐽)−1𝐽𝑇𝑒 (4.20)
Uma limitação do método de Gauss-Newton é que uma matriz Hessiana simplificada
não pode ser invertida. Nesse ponto, o algoritmo de Levenberg-Marquardt apresenta uma
modificação e, portanto, a atualização dos pesos é realizada da seguinte forma:
𝑊𝑖+1 = 𝑊𝑖 − ( 𝐽𝑇𝐽 + 𝜇𝐼)−1𝐽𝑇𝑒 (4.21)
Sendo que I é a matriz identidade e μ, um parâmetro que torna a matriz Hessiana definida
positiva (BISHOP, 1995).
55
5. METODOLOGIA E RESULTADOS
5.1 SELEÇÃO DO MÉTODO PARA A MODELAGEM DE ROP
Existem, na literatura, alguns modelos para previsão da taxa de penetração com base
nos parâmetros operacionais. Entretanto, a eficiência destes modelos é um pouco limitada. Na
grande maioria, os modelos tratam o fenômeno de forma bastante simplificada e são
desenvolvidos para a previsão da ROP em uma determinada região e sob condições muito
específicas. A generalização do uso destes modelos para outras regiões e outras condições leva
a resultados totalmente diferentes dos observados na prática. Três modelos são muito
difundidos e usados na indústria do petróleo: os modelos de Maurer (MAURER, 1965), Young
(YOUNG, 1969) e Bourgoyne (BOURGOYNE, 1974).
Os modelos de Maurer e Young, apesar de largamente utilizados na indústria do
petróleo, apresentam sérias limitações e seus resultados são geralmente incompatíveis com o
que se observa em campo. O principal problema dos dois modelos é que eles tentam descrever
um processo de extrema complexidade de forma muito simplificada.
Para tentar obter previsões mais precisas para a taxa de penetração, Bourgoyne e Young
(BOURGOYNE, 1974) propôs um novo modelo para descrever o comportamento da ROP,
muito mais abrangente e complexo. Este modelo contempla uma quantidade muito maior de
parâmetros quando comparado aos modelos de Maurer e Young e, por este motivo, gera
resultados muito mais próximos dos observados na prática.
Entretanto, algumas constantes do modelo precisam ser determinadas para cada poço, o
que é um inconveniente. Além disso, o modelo exige um conhecimento sobre o desgaste de
broca e sobre a força de compressão das rochas perfuradas, estimada com base no tempo de
trânsito. Embora tenha essa dificuldade, em alguns casos, é possível estimar a força de
compressão das rochas (quando os dados de sônico estão presentes em tempo real com base em
dados de poços de correlação). Mas dificilmente será possível prever o desgaste de broca.
Portanto, esses fatores inviabilizam a modelagem da taxa de penetração em tempo real.
Dessa forma, foi adotado neste trabalho a metodologia de modelagem de ROP utilizando
o conceito de Redes Neurais Artificiais, que possibilita uma maior generalização para diferentes
cenários, sem as especificidades intrínsecas dos modelos tradicionais, de forma a viabilizar uma
modelagem computacional em tempo real, dentre outras vantagens (GANDELMAN, 2012).
56
5.2 AQUISIÇÃO E TRATAMENTO DOS DADOS
Para atingir um bom desempenho na implementação da RNA e obter uma boa
modelagem do processo, é extremamente importante a etapa de aquisição e tratamento dos
dados. Uma RNA é efetiva para processos específicos, com isso, faz-se necessário assegurar
que todos os dados adquiridos sejam provenientes de cenário e condições semelhantes para
atingir um resultado satisfatório durante a aprendizagem (BRAGA et al., 2007).
Portanto, todos os parâmetros de perfuração utilizados no treinamento da RNA para
modelagem do ROP são provenientes de poços de correlação (Campo de Jubarte, Bacia de
Campos), perfurados pela mesma Sonda de Perfuração (Semissubmersível de 4ª geração),
utilizando basicamente o mesmo o mesmo programa de broca, mesmo tipo de broca (PDC), o
mesmo programa de hidráulica de broca, o mesmo projeto de coluna de perfuração e mesmo
fluido de perfuração.
Foram utilizadas 1293 amostras de dados de 5 poços de correlação do Campo de Jubarte,
para as fases de perfuração de 16”, 12 ¼” e 8 ½”. Os parâmetros utilizados no trabalho foram:
Profundidade medida (m) – MD (Measured depth);
Peso sobre broca (klbs) – WOB (Weight on bit);
Rotação (RPM) – Rotary Speed;
Torque (klbs.ft);
Vazão (GPM) – Flow in
Pressão de Bombeio (PSI) – Standpipe Pressure
Densidade do Fluido de Perfuração (PPG) – Mud weight
Diâmetro da broca (polegadas) – Bit size
Metros perfurados na corrida de broca (m) – Drilled length
Taxa de penetração (m/h) – ROP (Rate of penetration)
Outro ponto fundamental para o bom desempenho da RNA é assegurar que as amostras
de dados estejam sempre nas mesmas condições operacionais, ou seja, durante a perfuração.
Para isso, foram considerados apenas as amostras de dados em que o Peso sobre broca, Rotação
e Vazão fossem maiores que zero (em perfuração). Na Tabela 5.1 é apresentado uma amostra
dos parâmetros de perfuração coletados do Campo de Jubarte, na Bacia de Campos.

57
Tabela 5.1 – Exemplo da amostragem dos parâmetros de perfuração do Campo de Jubarte.
MD (m)
WOB (klbs)
Rotary Speed (rpm)
Torque (lbs.ft)
Flow Rate
(gpm)
Standpipe Press. (psi)
Mud Weight (ppg)
Bit size (in)
Drilled Length
(m)
ROP (m/h)
1963 10 100 18 650 2580 9,3 16 5 2,40
1970 10 100 18 650 2580 9,3 16 12 20,00
1979 10 100 18 650 2580 9,3 16 21 20,77
1979 10 100 18 650 2580 9,3 16 21 20,77
1991 10 100 13 680 2750 9,3 16 33 13,85
2020 10 100 13 700 2850 9,3 16 62 25,22
2049 10 100 13 700 2850 9,3 16 91 19,33
2077 10 100 15 720 3000 9,3 16 119 14,00
2105 10 80 15 720 3000 9,3 16 147 19,76
Para otimizar o ajuste dos pesos da RNA durante o treinamento, é necessário que os
dados sejam normalizados, ou seja, colocados em uma mesma escala para que os pesos tornem-
se menores e com valores previsíveis, como mostra a Equação 5.1 (GODA et al. 2005):
𝑋𝑛 =𝑋 − 𝑋𝑚𝑖𝑛
𝑋𝑚𝑎𝑥 − 𝑋𝑚𝑖𝑛 (5.1)
Onde:
Xn: Valor normalizado
X: Valor a ser normalizado
Xmin: Menor valor do conjunto de dados
Xmax: Maior valor do conjunto de dados
Na Figura 5.1 é apresentado o fluxograma com a metodologia adotada na
implementação da Rede Neural para modelagem da taxa de penetração em poços de correlação.
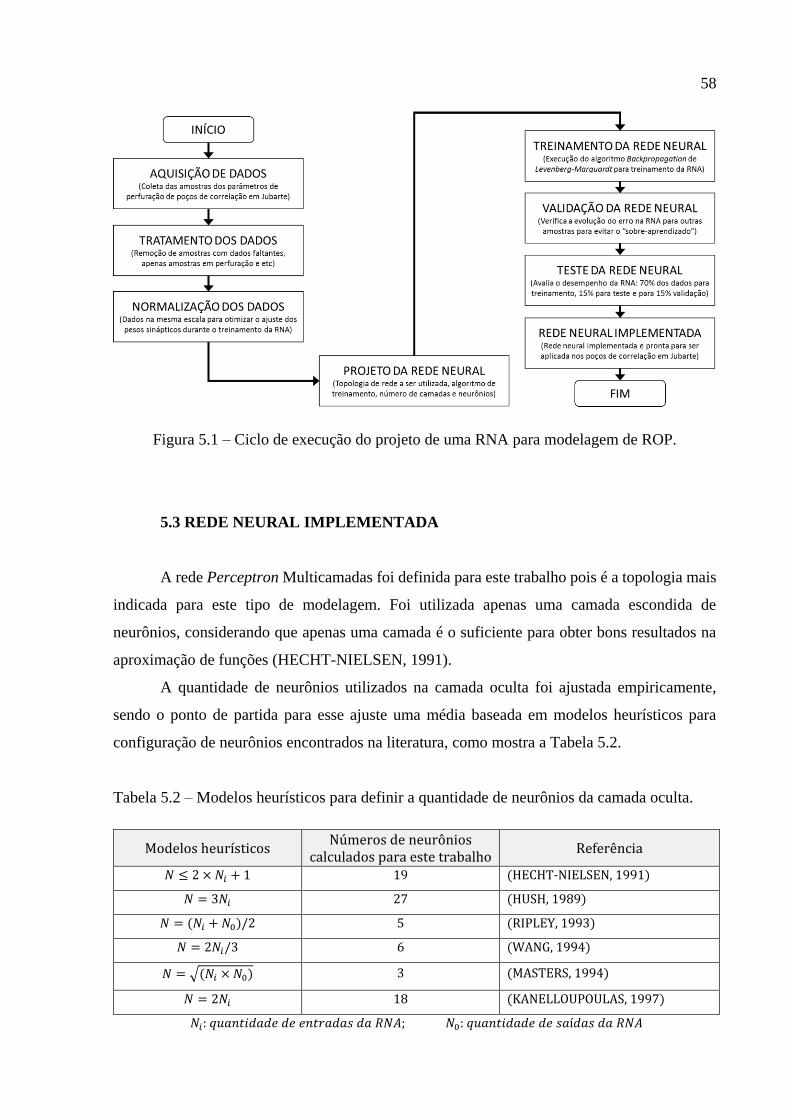
58
Figura 5.1 – Ciclo de execução do projeto de uma RNA para modelagem de ROP.
5.3 REDE NEURAL IMPLEMENTADA
A rede Perceptron Multicamadas foi definida para este trabalho pois é a topologia mais
indicada para este tipo de modelagem. Foi utilizada apenas uma camada escondida de
neurônios, considerando que apenas uma camada é o suficiente para obter bons resultados na
aproximação de funções (HECHT-NIELSEN, 1991).
A quantidade de neurônios utilizados na camada oculta foi ajustada empiricamente,
sendo o ponto de partida para esse ajuste uma média baseada em modelos heurísticos para
configuração de neurônios encontrados na literatura, como mostra a Tabela 5.2.
Tabela 5.2 – Modelos heurísticos para definir a quantidade de neurônios da camada oculta.
Modelos heurísticos Números de neurônios
calculados para este trabalho Referência
𝑁 ≤ 2 × 𝑁𝑖 + 1 19 (HECHT-NIELSEN, 1991)
𝑁 = 3𝑁𝑖 27 (HUSH, 1989)
𝑁 = (𝑁𝑖 + 𝑁0)/2 5 (RIPLEY, 1993)
𝑁 = 2𝑁𝑖/3 6 (WANG, 1994)
𝑁 = √(𝑁𝑖 × 𝑁0) 3 (MASTERS, 1994)
𝑁 = 2𝑁𝑖 18 (KANELLOUPOULAS, 1997)
𝑁𝑖: 𝑞𝑢𝑎𝑛𝑡𝑖𝑑𝑎𝑑𝑒 𝑑𝑒 𝑒𝑛𝑡𝑟𝑎𝑑𝑎𝑠 𝑑𝑎 𝑅𝑁𝐴; 𝑁0: 𝑞𝑢𝑎𝑛𝑡𝑖𝑑𝑎𝑑𝑒 𝑑𝑒 𝑠𝑎í𝑑𝑎𝑠 𝑑𝑎 𝑅𝑁𝐴
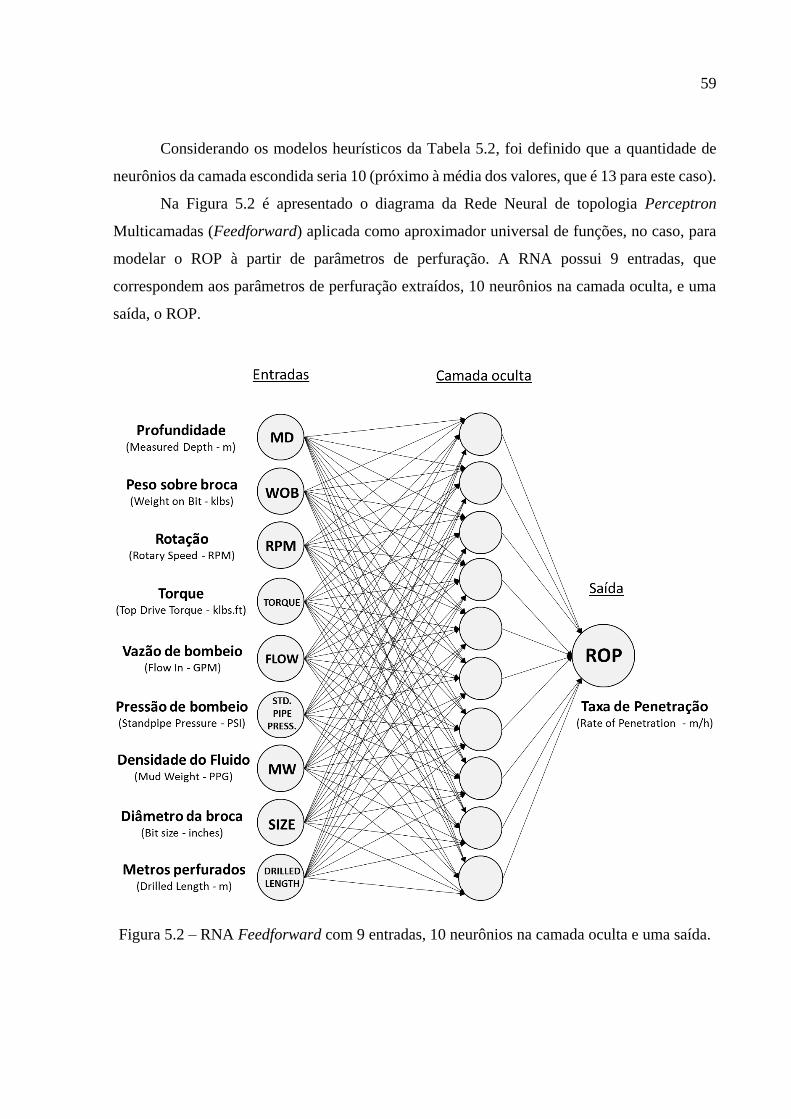
59
Considerando os modelos heurísticos da Tabela 5.2, foi definido que a quantidade de
neurônios da camada escondida seria 10 (próximo à média dos valores, que é 13 para este caso).
Na Figura 5.2 é apresentado o diagrama da Rede Neural de topologia Perceptron
Multicamadas (Feedforward) aplicada como aproximador universal de funções, no caso, para
modelar o ROP à partir de parâmetros de perfuração. A RNA possui 9 entradas, que
correspondem aos parâmetros de perfuração extraídos, 10 neurônios na camada oculta, e uma
saída, o ROP.
Figura 5.2 – RNA Feedforward com 9 entradas, 10 neurônios na camada oculta e uma saída.

60
5.4 RESULTADOS OBTIDOS
Para analisar os resultados obtidos, faz se necessário uma breve descrição sobre alguns
métodos numéricos que são comumente empregados na análise do desempenho de uma Rede
Neural. Serão descritos dois métodos: Análise de Regressão Linear; Coeficiente de
Determinação.
5.4.1 ANÁLISE DA REGRESSÃO LINEAR
A análise de regressão linear é utilizada para estudar a relação entre uma variável
dependente e outra independente, a qual é denominada variável explicativa. O intuito é estimar
o valor médio da população, a partir de valores amostrais conhecidos. O modelo de regressão
linear pode ser escrito como (REIS, 1994):
𝑌𝑖 = 𝛽1 + 𝛽2𝑋𝑖 + 휀𝑖 (5.2)
Onde:
Yi = i-ésimo valor da variável resposta;
β1 e β2 = Parâmetros;
Xi = i=ésimo valor da variável explicativa;
εi = Termo do erro aleatório (distúrbio estocástico ou resíduo);
i = 1,2, ... , n.
5.4.2 COEFICIENTE DE DETERMINAÇÃO (R²)
O coeficiente de determinação é o quadrado do coeficiente de correlação (R). Mede a
explicação obtida ou a proporção explicada da variação total da variável resposta. O coeficiente
de determinação ou explicação é uma medida de ajustamento de um modelo estatístico linear
generalizado, como a Regressão linear, em relação aos valores observados. Pode ser calculado
pela seguinte expressão (TRIOLA, 1999):
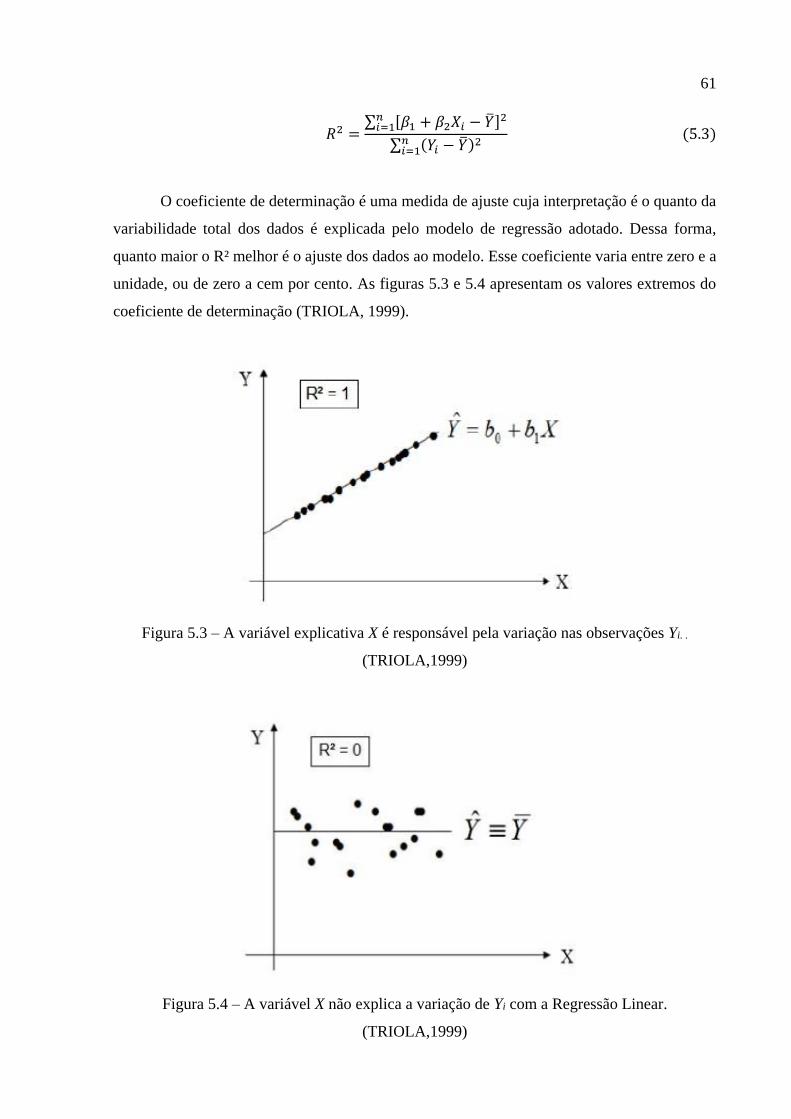
61
𝑅2 =∑ [𝛽1 + 𝛽2𝑋𝑖 − �̅�]
2𝑛𝑖=1
∑ (𝑌𝑖 − �̅�)2𝑛
𝑖=1
(5.3)
O coeficiente de determinação é uma medida de ajuste cuja interpretação é o quanto da
variabilidade total dos dados é explicada pelo modelo de regressão adotado. Dessa forma,
quanto maior o R² melhor é o ajuste dos dados ao modelo. Esse coeficiente varia entre zero e a
unidade, ou de zero a cem por cento. As figuras 5.3 e 5.4 apresentam os valores extremos do
coeficiente de determinação (TRIOLA, 1999).
Figura 5.3 – A variável explicativa X é responsável pela variação nas observações Yi. .
(TRIOLA,1999)
Figura 5.4 – A variável X não explica a variação de Yi com a Regressão Linear.
(TRIOLA,1999)

62
É importante salientar que uma análise pura do R² pode causar falsas interpretações uma
vez que se as amplitudes dos intervalos de confiança forem grandes o resultado obtido não será
preciso.
5.4.3 ANÁLISE DOS RESULTADOS OBTIDOS
Foram realizados simulações e testes com toda a massa de dados, e separados por fases
de perfuração (16”, 12 ¼” e 8 ½”). Em todas as implementações foram utilizados 70% dos
dados para treinamento da rede, 15% para validação e 15% para teste. A RNA foi desenvolvida
no Mathworks MATLAB R2014b através da toolbox de Redes Neurais disponível no software.
5.4.3.1 SIMULAÇÃO UTILIZANDO TODAS AS FASES DE PERFURAÇÃO
Primeiramente, foi implementada uma rede neural treinada com todo o conjunto de
dados, ou seja, todas as fases de perfuração (16”, 12 ¼” e 8 ½”). Na figura 5.5 está representado
a função performance da RNA que convergiu na 13ª época com um EQM de 0,0025575. Não
houve overfitting, a rede convergiu com um erro baixo.
Figura 5.5 – Função performance da RNA implementada para todas as fases de perfuração.
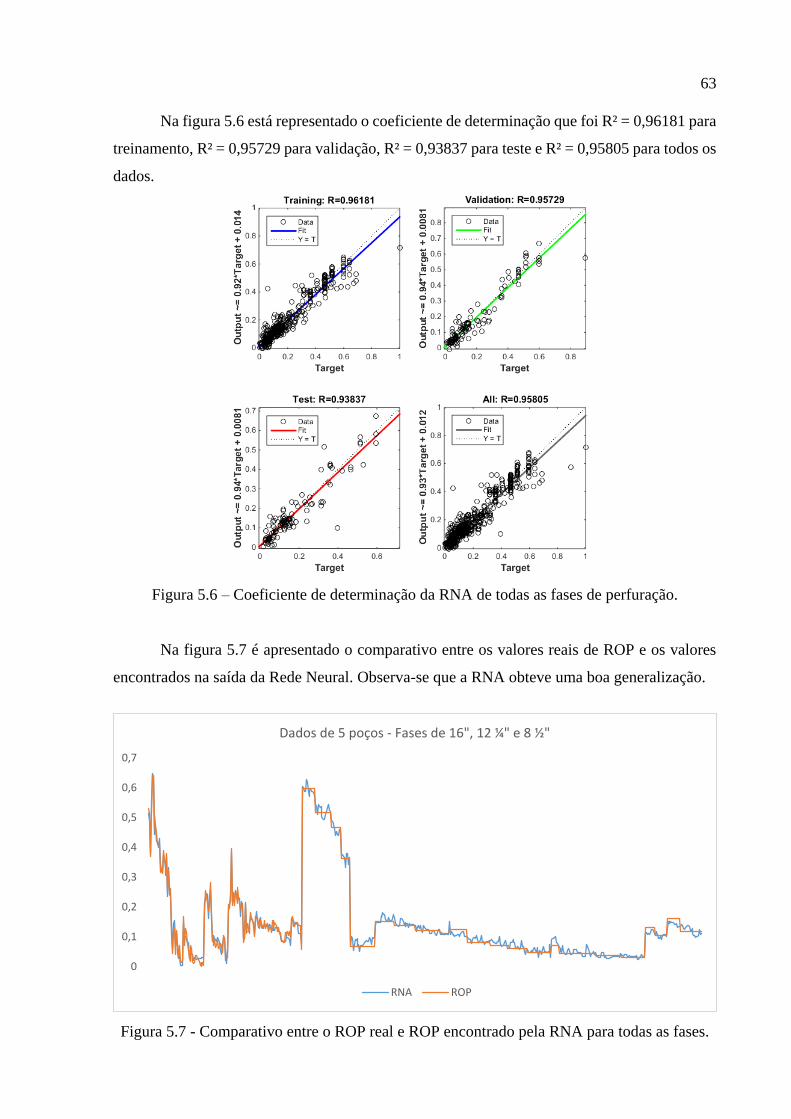
63
Na figura 5.6 está representado o coeficiente de determinação que foi R² = 0,96181 para
treinamento, R² = 0,95729 para validação, R² = 0,93837 para teste e R² = 0,95805 para todos os
dados.
Figura 5.6 – Coeficiente de determinação da RNA de todas as fases de perfuração.
Na figura 5.7 é apresentado o comparativo entre os valores reais de ROP e os valores
encontrados na saída da Rede Neural. Observa-se que a RNA obteve uma boa generalização.
Figura 5.7 - Comparativo entre o ROP real e ROP encontrado pela RNA para todas as fases.
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
Dados de 5 poços - Fases de 16", 12 ¼" e 8 ½"
RNA ROP
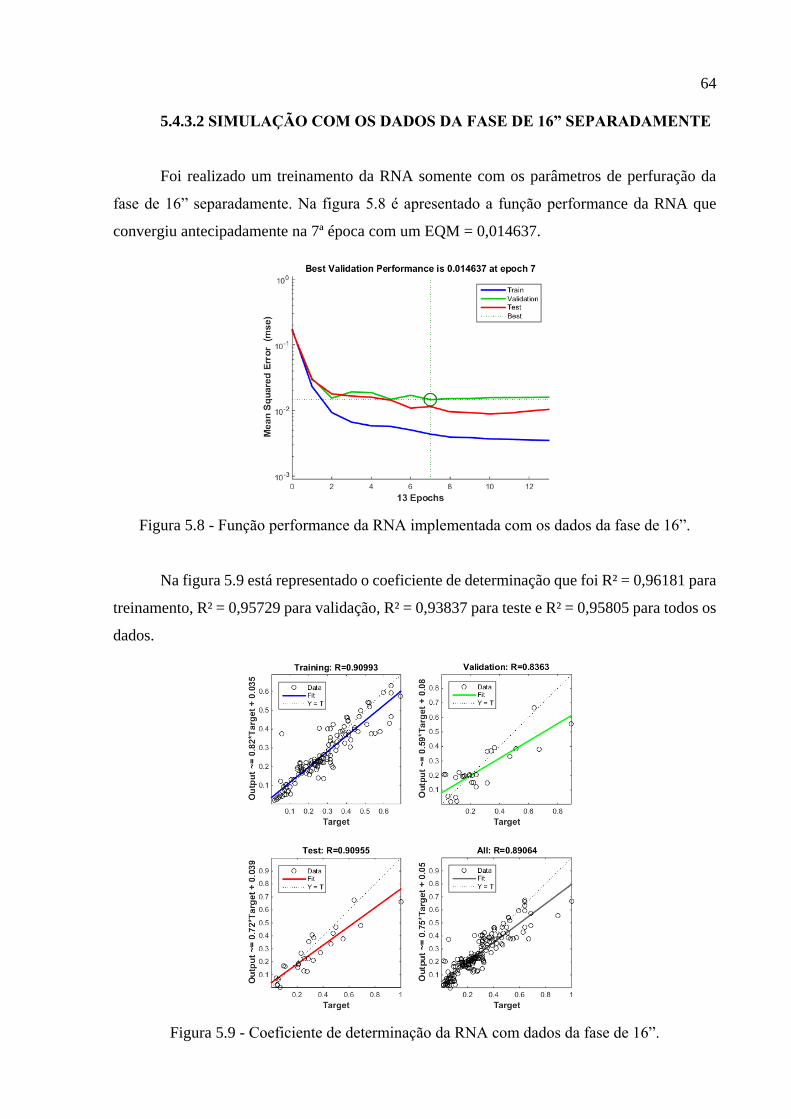
64
5.4.3.2 SIMULAÇÃO COM OS DADOS DA FASE DE 16” SEPARADAMENTE
Foi realizado um treinamento da RNA somente com os parâmetros de perfuração da
fase de 16” separadamente. Na figura 5.8 é apresentado a função performance da RNA que
convergiu antecipadamente na 7ª época com um EQM = 0,014637.
Figura 5.8 - Função performance da RNA implementada com os dados da fase de 16”.
Na figura 5.9 está representado o coeficiente de determinação que foi R² = 0,96181 para
treinamento, R² = 0,95729 para validação, R² = 0,93837 para teste e R² = 0,95805 para todos os
dados.
Figura 5.9 - Coeficiente de determinação da RNA com dados da fase de 16”.
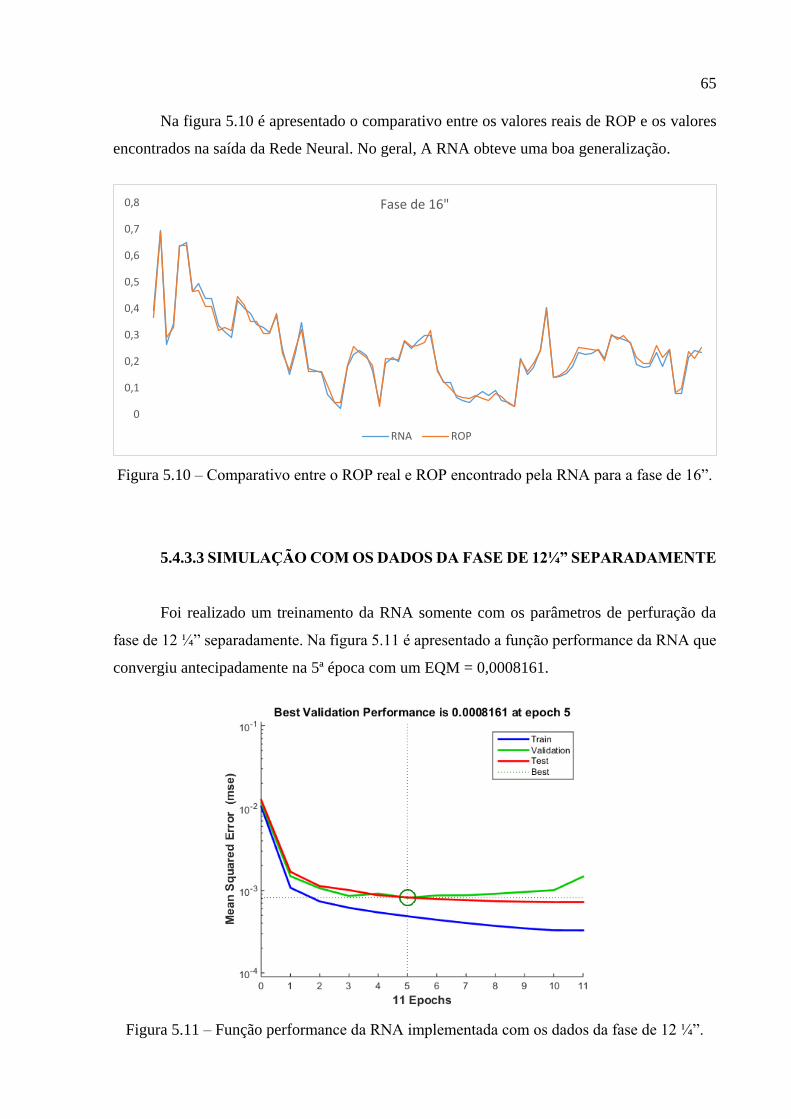
65
Na figura 5.10 é apresentado o comparativo entre os valores reais de ROP e os valores
encontrados na saída da Rede Neural. No geral, A RNA obteve uma boa generalização.
Figura 5.10 – Comparativo entre o ROP real e ROP encontrado pela RNA para a fase de 16”.
5.4.3.3 SIMULAÇÃO COM OS DADOS DA FASE DE 12¼” SEPARADAMENTE
Foi realizado um treinamento da RNA somente com os parâmetros de perfuração da
fase de 12 ¼” separadamente. Na figura 5.11 é apresentado a função performance da RNA que
convergiu antecipadamente na 5ª época com um EQM = 0,0008161.
Figura 5.11 – Função performance da RNA implementada com os dados da fase de 12 ¼”.
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8 Fase de 16"
RNA ROP
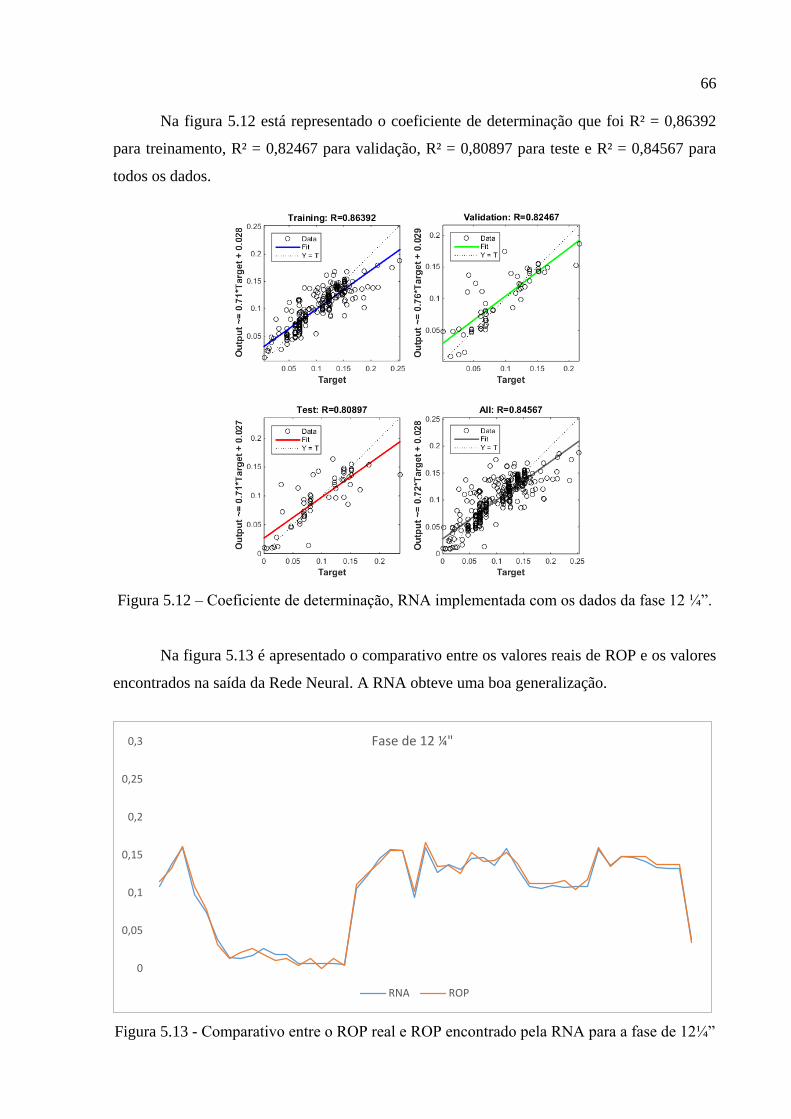
66
Na figura 5.12 está representado o coeficiente de determinação que foi R² = 0,86392
para treinamento, R² = 0,82467 para validação, R² = 0,80897 para teste e R² = 0,84567 para
todos os dados.
Figura 5.12 – Coeficiente de determinação, RNA implementada com os dados da fase 12 ¼”.
Na figura 5.13 é apresentado o comparativo entre os valores reais de ROP e os valores
encontrados na saída da Rede Neural. A RNA obteve uma boa generalização.
Figura 5.13 - Comparativo entre o ROP real e ROP encontrado pela RNA para a fase de 12¼”
0
0,05
0,1
0,15
0,2
0,25
0,3 Fase de 12 ¼"
RNA ROP
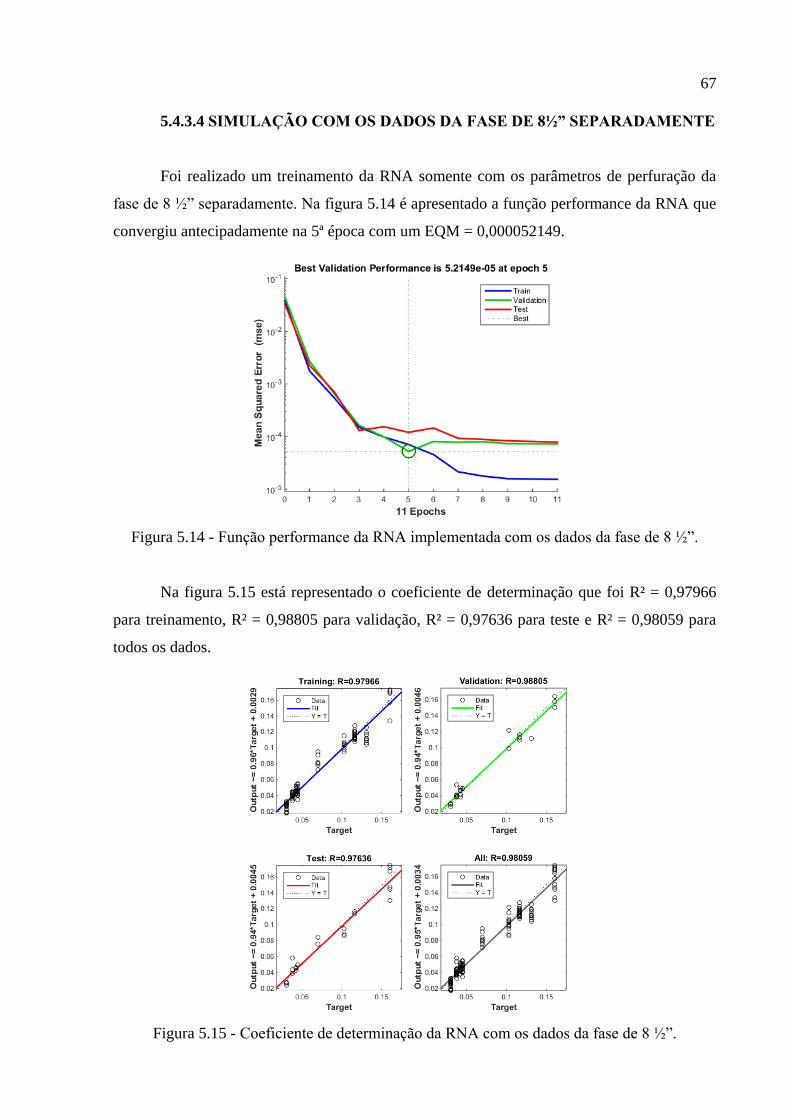
67
5.4.3.4 SIMULAÇÃO COM OS DADOS DA FASE DE 8½” SEPARADAMENTE
Foi realizado um treinamento da RNA somente com os parâmetros de perfuração da
fase de 8 ½” separadamente. Na figura 5.14 é apresentado a função performance da RNA que
convergiu antecipadamente na 5ª época com um EQM = 0,000052149.
Figura 5.14 - Função performance da RNA implementada com os dados da fase de 8 ½”.
Na figura 5.15 está representado o coeficiente de determinação que foi R² = 0,97966
para treinamento, R² = 0,98805 para validação, R² = 0,97636 para teste e R² = 0,98059 para
todos os dados.
Figura 5.15 - Coeficiente de determinação da RNA com os dados da fase de 8 ½”.
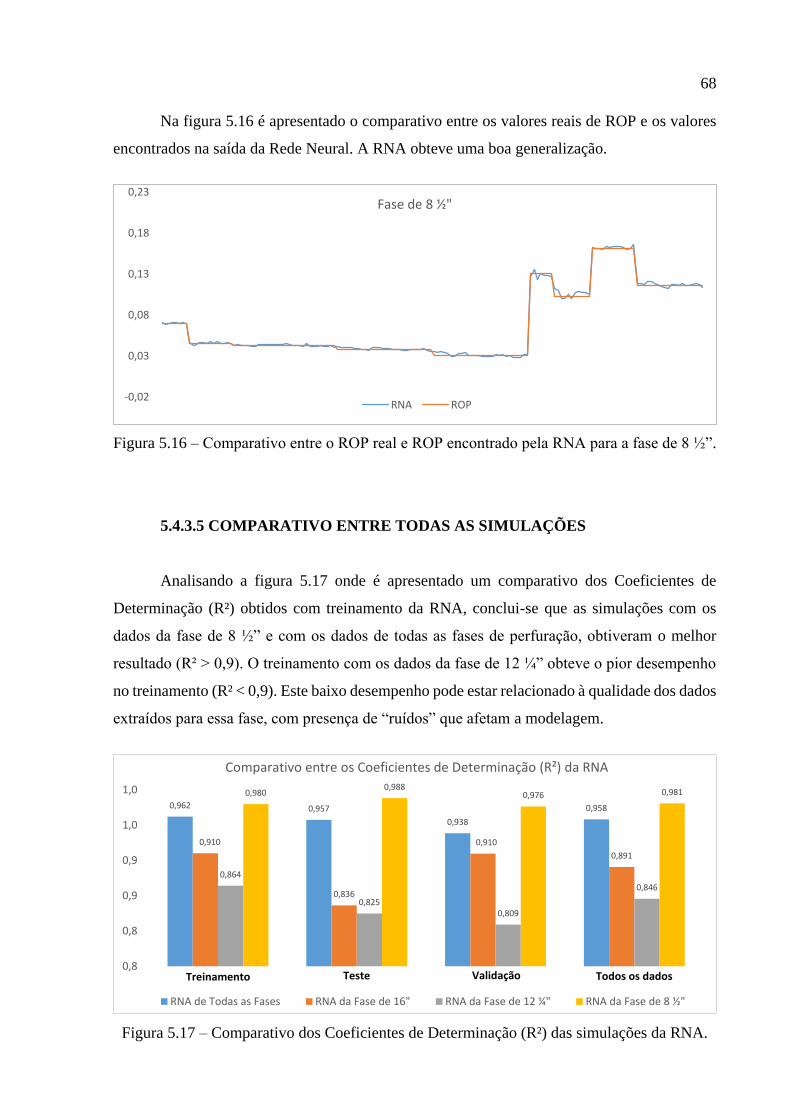
68
Na figura 5.16 é apresentado o comparativo entre os valores reais de ROP e os valores
encontrados na saída da Rede Neural. A RNA obteve uma boa generalização.
Figura 5.16 – Comparativo entre o ROP real e ROP encontrado pela RNA para a fase de 8 ½”.
5.4.3.5 COMPARATIVO ENTRE TODAS AS SIMULAÇÕES
Analisando a figura 5.17 onde é apresentado um comparativo dos Coeficientes de
Determinação (R²) obtidos com treinamento da RNA, conclui-se que as simulações com os
dados da fase de 8 ½” e com os dados de todas as fases de perfuração, obtiveram o melhor
resultado (R² > 0,9). O treinamento com os dados da fase de 12 ¼” obteve o pior desempenho
no treinamento (R² < 0,9). Este baixo desempenho pode estar relacionado à qualidade dos dados
extraídos para essa fase, com presença de “ruídos” que afetam a modelagem.
Figura 5.17 – Comparativo dos Coeficientes de Determinação (R²) das simulações da RNA.
-0,02
0,03
0,08
0,13
0,18
0,23Fase de 8 ½"
RNA ROP
0,962 0,957
0,938
0,958
0,910
0,836
0,910
0,891
0,864
0,8250,809
0,846
0,9800,988
0,976 0,981
0,8
0,8
0,9
0,9
1,0
1,0
Comparativo entre os Coeficientes de Determinação (R²) da RNA
RNA de Todas as Fases RNA da Fase de 16" RNA da Fase de 12 ¼" RNA da Fase de 8 ½"
Treinamento Teste Validação Todos os dados
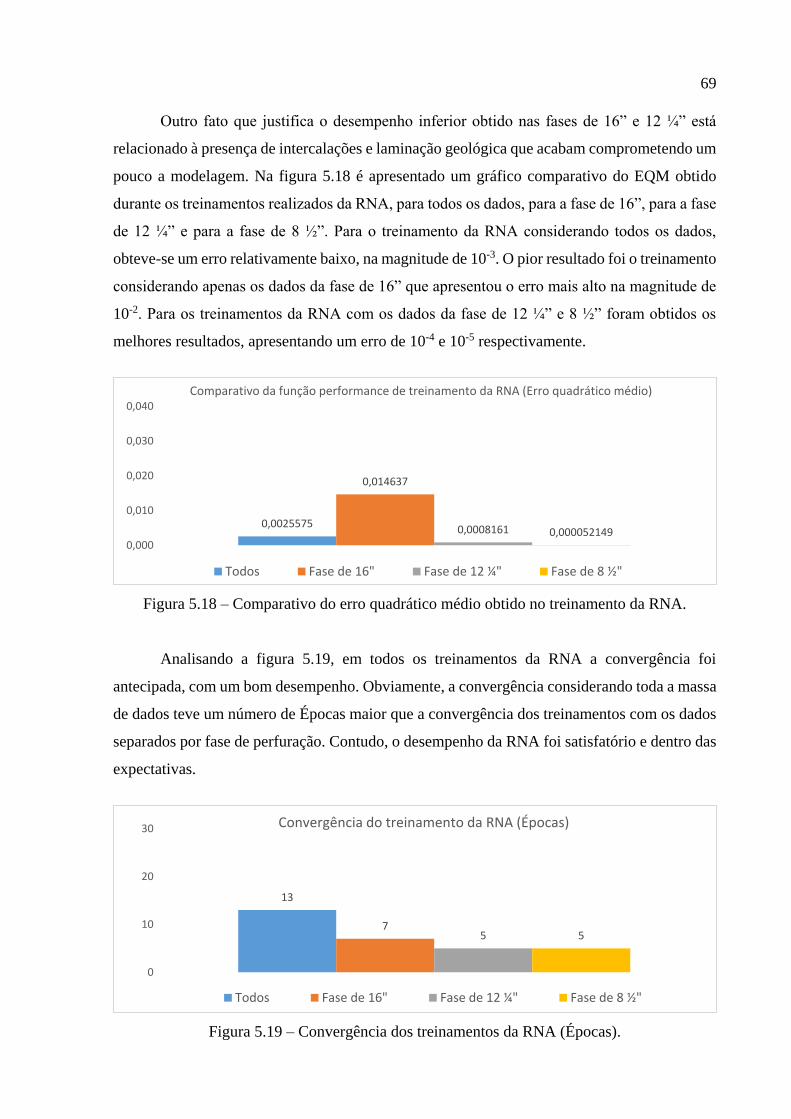
69
Outro fato que justifica o desempenho inferior obtido nas fases de 16” e 12 ¼” está
relacionado à presença de intercalações e laminação geológica que acabam comprometendo um
pouco a modelagem. Na figura 5.18 é apresentado um gráfico comparativo do EQM obtido
durante os treinamentos realizados da RNA, para todos os dados, para a fase de 16”, para a fase
de 12 ¼” e para a fase de 8 ½”. Para o treinamento da RNA considerando todos os dados,
obteve-se um erro relativamente baixo, na magnitude de 10-3. O pior resultado foi o treinamento
considerando apenas os dados da fase de 16” que apresentou o erro mais alto na magnitude de
10-2. Para os treinamentos da RNA com os dados da fase de 12 ¼” e 8 ½” foram obtidos os
melhores resultados, apresentando um erro de 10-4 e 10-5 respectivamente.
Figura 5.18 – Comparativo do erro quadrático médio obtido no treinamento da RNA.
Analisando a figura 5.19, em todos os treinamentos da RNA a convergência foi
antecipada, com um bom desempenho. Obviamente, a convergência considerando toda a massa
de dados teve um número de Épocas maior que a convergência dos treinamentos com os dados
separados por fase de perfuração. Contudo, o desempenho da RNA foi satisfatório e dentro das
expectativas.
Figura 5.19 – Convergência dos treinamentos da RNA (Épocas).
0,0025575
0,014637
0,0008161 0,0000521490,000
0,010
0,020
0,030
0,040Comparativo da função performance de treinamento da RNA (Erro quadrático médio)
Todos Fase de 16" Fase de 12 ¼" Fase de 8 ½"
13
75 5
0
10
20
30 Convergência do treinamento da RNA (Épocas)
Todos Fase de 16" Fase de 12 ¼" Fase de 8 ½"
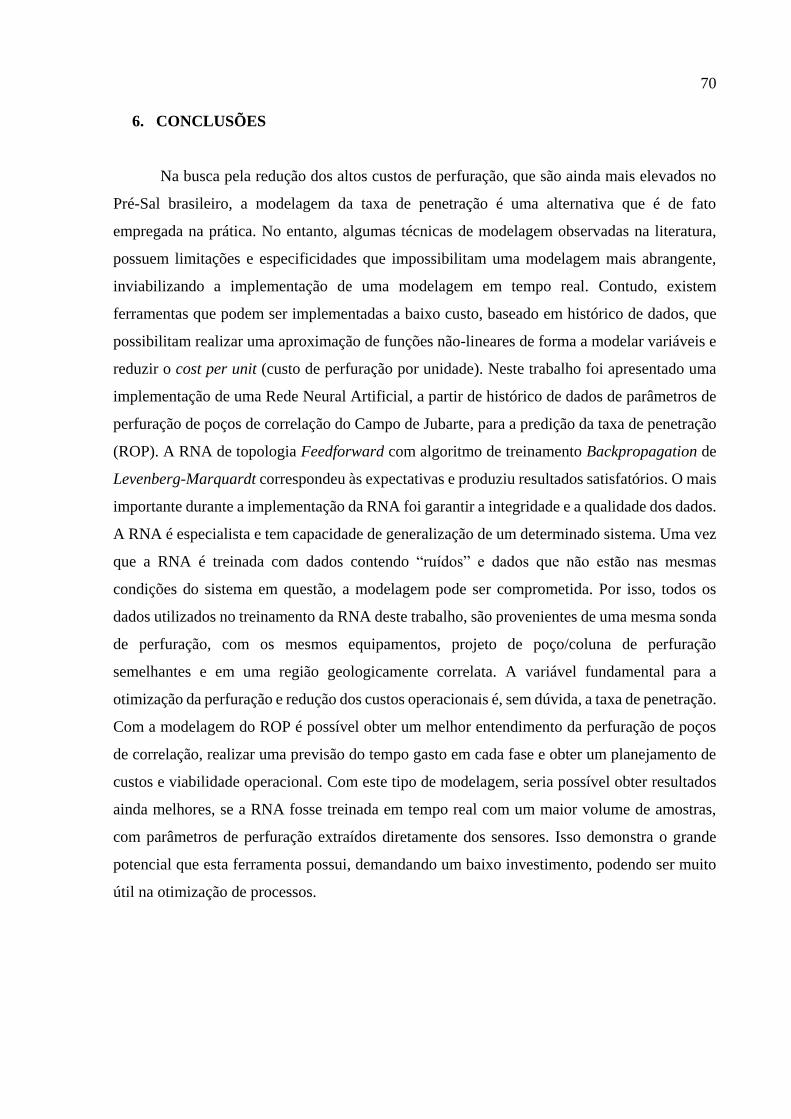
70
6. CONCLUSÕES
Na busca pela redução dos altos custos de perfuração, que são ainda mais elevados no
Pré-Sal brasileiro, a modelagem da taxa de penetração é uma alternativa que é de fato
empregada na prática. No entanto, algumas técnicas de modelagem observadas na literatura,
possuem limitações e especificidades que impossibilitam uma modelagem mais abrangente,
inviabilizando a implementação de uma modelagem em tempo real. Contudo, existem
ferramentas que podem ser implementadas a baixo custo, baseado em histórico de dados, que
possibilitam realizar uma aproximação de funções não-lineares de forma a modelar variáveis e
reduzir o cost per unit (custo de perfuração por unidade). Neste trabalho foi apresentado uma
implementação de uma Rede Neural Artificial, a partir de histórico de dados de parâmetros de
perfuração de poços de correlação do Campo de Jubarte, para a predição da taxa de penetração
(ROP). A RNA de topologia Feedforward com algoritmo de treinamento Backpropagation de
Levenberg-Marquardt correspondeu às expectativas e produziu resultados satisfatórios. O mais
importante durante a implementação da RNA foi garantir a integridade e a qualidade dos dados.
A RNA é especialista e tem capacidade de generalização de um determinado sistema. Uma vez
que a RNA é treinada com dados contendo “ruídos” e dados que não estão nas mesmas
condições do sistema em questão, a modelagem pode ser comprometida. Por isso, todos os
dados utilizados no treinamento da RNA deste trabalho, são provenientes de uma mesma sonda
de perfuração, com os mesmos equipamentos, projeto de poço/coluna de perfuração
semelhantes e em uma região geologicamente correlata. A variável fundamental para a
otimização da perfuração e redução dos custos operacionais é, sem dúvida, a taxa de penetração.
Com a modelagem do ROP é possível obter um melhor entendimento da perfuração de poços
de correlação, realizar uma previsão do tempo gasto em cada fase e obter um planejamento de
custos e viabilidade operacional. Com este tipo de modelagem, seria possível obter resultados
ainda melhores, se a RNA fosse treinada em tempo real com um maior volume de amostras,
com parâmetros de perfuração extraídos diretamente dos sensores. Isso demonstra o grande
potencial que esta ferramenta possui, demandando um baixo investimento, podendo ser muito
útil na otimização de processos.
71
REFERÊNCIAS BIBLIOGRÁFICAS
AADNOY, B.S., COOPER, I., MISKA, S.Z., MITCHELL, R.F., PAYNE, M.L. Advanced
Drilling and Well Technology, Society of Petroleum Engineers, E.U.A, 2009.
ANP, Resolução de Diretoria nº 650/2003, Sumário Executivo do Campo de Jubarte, Agência
Nacional do Petróleo, 2003.
ANP, Website da Agência Nacional do Petróleo, 2015.
ARAGAO, A.F.L., TEIXEIRA, G.T., MARTINS, A.L., GANDELMAN, R.A., SILVA, R.A.,
PWD Analysis in Deepwater Environments: Campos Basin Case Study, Deep Offshore
Technology, Vitória – Brasil, 8 a 10 de novembro, 2005.
ARIENTI, L. M., CALDAS J. L. L., SILVA, J. G. R. & FALCONE, C. M., Modelo
sedimentológico-estratigráfico de Jubarte. Relatório Parcial 1, Petrobras, 2005.
BISHOP, C. M. Neural Networks for Pattern Recognition. Clarendon Press, Oxford. 1995.
BOURGOYNE, A.T., MILLHEIM, K.K., CHENEVERT, M.E., YOUNG, F.S., Applied
Drilling Engineering, Society of Petroleum Engineers, Richardson - TX, 1991.
BRAGA, A. P., CARVALHO, A. P. L. F., LUDEMIR, T. B., “Redes Neurais Artificiais: Teoria
e Aplicações”, Rio de Janeiro: LTC, 2007.
CARPENTER, G. A.; GROSSBERG, S., “ART-2: Self-Organization of a Stable Category
Recognition Codes for Analog Input Patterns”, Applied Optics, Vol.26, N.23, p.4919-4930,
1987.
FEAR,M.J.:”How to Improve Rate of Penetration in Field Operations”,SPE 55050, IADC/SPE
Drilling Conference , New Orleans , USA, March 12-15, 1999.
GANDELMAN, R. A., Predição da ROP e Otimização em Tempo Real de Parâmetros
Operacionais na Perfuração de Poços de Petróleo Offshore, Dissertação de Mestrado em
Tecnologia de Processos Químicos e Bioquímicos, Universidade Federal do Rio de Janeiro,
UFRJ, Escola de Química, 2012.
72
GODA, H., MAIER, H. & BEHRENBRUCH, P. The Development of an Optimal Artificial
Neural Network Model for Estimating Initial Water Saturation - Australian Reservoir. In
Proceedings of SPE Asia Pacific Oil and Gas Conference and Exhibition. Society of Petroleum
Engineers, 2005.
HAYKIN, S., “Redes neurais: princípios e prática”, 2º Ed., Porto Alegre: BOOKMAN, 2001.
HECHT-NIELSEN, Robert-Neurocomputing. HNC, Inc. and University of California, San
Diego, 1991.
HOPFIELD, J. J., “Neural Networks and Physical Systems with Emergent Collective
Computational Abilities”, Proceedings of National Academy of Sciences, Vol.79, pp. 2554-
2558, April, 1982.
HUSH D.R., Classification with neural networks: a performance analysis. Proc. Of the IEEE
Int Conf on systems Engg, Dayton Ohia USA 1989; 277-280., 1989.
JAMES, W., CHUKWU, G.A., KHATANIAR, S., PATIL, S., An Economic Appraisal of Hole
Cleaning Using Hydraulic Horse Power and Jet Impact Force, SPE-83496, West Regional
Pacific Section, California, Estados Unidos, 19 a 24 de maio, 2003.
KOHONEN, T., “Self-Organization and Associative Memory”, 2nd Edition, Springer, 1988.
LIU, H. On the levenberg-marquardt training method for feed-forward neural networks. In
Proceedings of the 2010 International Conference on Natural Computation, ICNC’10, volume
1, 2010.
MASTERS T., Practical neural network recipes in C++, Academic Press, Boston MA, 1994.
MOHRIAK W.U., Bacias Sedimentares da Margem Continental Brasileira. In: Bizzi L.A.,
Schobbenhaus R.M. Vidotti, Gonçalves J.H. (eds.) Geologia, Tectônica e Recursos Minerais
do Brasil. CPRM, p. 87-94, 2003.
MOHRIAK, W., SZATMARI, P., ANJOS, S. M. C., Sal: Geologia e Tectonia, Beca/BALL
Edições LTDA, Brasil, 2009.
RANGEL, H. D., MARTINS, F. A. L., ESTEVES, F. R. & FEIJÓ, Bacia de Campos, Boletim
de Geociências da Petrobrás, 8(1):203-217, 1994.
73
RASTEGAR M., HARELAND G., NYGAARD R., A. BASHARI, Optimization of Multiple
Bit Runs Based on ROP Models and Cost Equation: A New Methodology Applied for One of
the Persian Gulf Carbonate Fields, IADC.SPE, 2008.
REIS, E., Estatistica Descritiva (2ª ed.). Lisboa: Edições Sílabo, 1994.
REZENDE, S. O. et al, “Sistemas inteligentes: Fundamentos e Aplicações”, Editora Manole
Ltda, 2003.
RIPLEY, B. D., Statistical aspects of neural networks. In Networks and Chaos — Statistical
and Probabilistic Aspects. eds O. E. Barndorff-Nielsen, J. L. Jensen and W. S. Kendall,
Chapman & Hall. pp. 40-123., 1993.
ROCHA, L.A.S., AZEVEDO, C. T., Projetos de Poços de Petróleo, Editora Interciência, Rio
de Janeiro, 2008.
THOMAS, J.E., Fundamentos de Engenharia de Petróleo, Editora Interciência, Rio de Janeiro,
2001.
TRIOLA, Mario F. Introdução à Estatística. Rio de Janeiro: LTC, 1999.
WALDMANN, A.T.A., Mecanismos que Governam a Efetividade de Agentes Obturantes no
Controle da Invasão de Fluidos de Perfuração na Rocha Reservatório de Petróleo, Dissertação
de Mestrado, Departamento de Engenharia Mecânica, PUCRio, 2005.
WANG C., A theory of generalization in learning machines with neural application. Ph.D.
thesis, The Univesity of Pennsylvania, USA, 1994.
WIDROW, B.; RUMELHART, D.E.; LEHR, M.A., “Neural Networks: Applications in
Industry, Business and Science”, Communications of ACM, Vol.37, N.3, March, 1994.
WOLF, M.Z., ARIAN, A., Field Measurements of Downhole Drillstring Vibrations, SPE-4330,
Annual Technical Conference and Exibition, Las Vegas – NV, 22 a 25 de setembro, 1985.