Embed Size (px)
Citation preview
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.Rev 5058-CO900F
PUBLIC INFORMATION
Motion ControlFundamentos Básicos do Controle de Movimento
Daniel GiraldiGOTC – Global OEM Technical ConsultantFS Eng (TÜV Rheinland, #8552/14, Machinery)12/08/2014
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copyri
Definição de MOTION CONTROL em 4 palavras “Mover um motor elétrico”
Temos duas versões:

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copyri
Definição de MOTION CONTROL emapenas 4 palavras “Mover um motor elétrico”Drive AC
( inversores, PowerFlex, Motor AC, motor de indução )
Servo Drive( posicionamento em malha fechada,
alta velocidade, alta precisão, Kinetix, SERCOS, CIP, motores de imã permanenteTemos duas versões:
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Na maioria dos casos, Motion Control significa: Sistema Servo Acionado “Posicionamento de malha fechada”
Definição de posicionamento de “malha fechada”:
O que é Motion Control?

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
View Animation
Pick and Place
Posição 1
Posição 2
Definindo “Posicionamento de MalhaFechada”
Posicionamento de malha fechadaResulta num movimento que é:
Preciso e Repetitivo
Packaging MachineAnimation:

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
View AnimationRotary Knife application:Web = continous sheet or filmRotary Knife precisely cuts to length “on the fly” Rotary Knife
Drives AC vs Servo Drive
Aplicações de Servo posicionamento emmalha fechada, posiçãoé o parâmetro de controle principal.
Aplicações com Drives AC velocidade é o parâmetro de controleprincipal
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
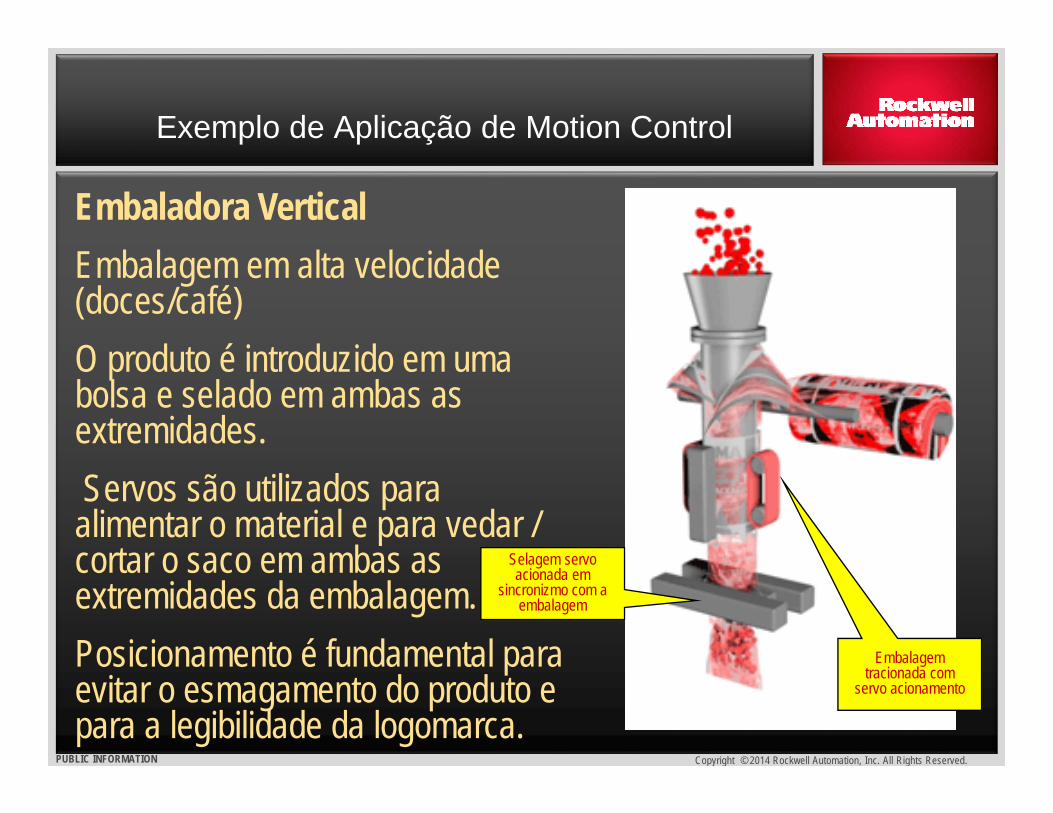
Embalagemtracionada com
servo acionamento
Selagem servo acionada em
sincronizmo com a embalagem
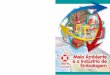
Embaladora VerticalEmbalagem em alta velocidade(doces/café)O produto é introduzido em uma bolsa e selado em ambas as extremidades.Servos são utilizados para alimentar o material e para vedar / cortar o saco em ambas as extremidades da embalagem.Posicionamento é fundamental para evitar o esmagamento do produto e para a legibilidade da logomarca.
Exemplo de Aplicação de Motion Control
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
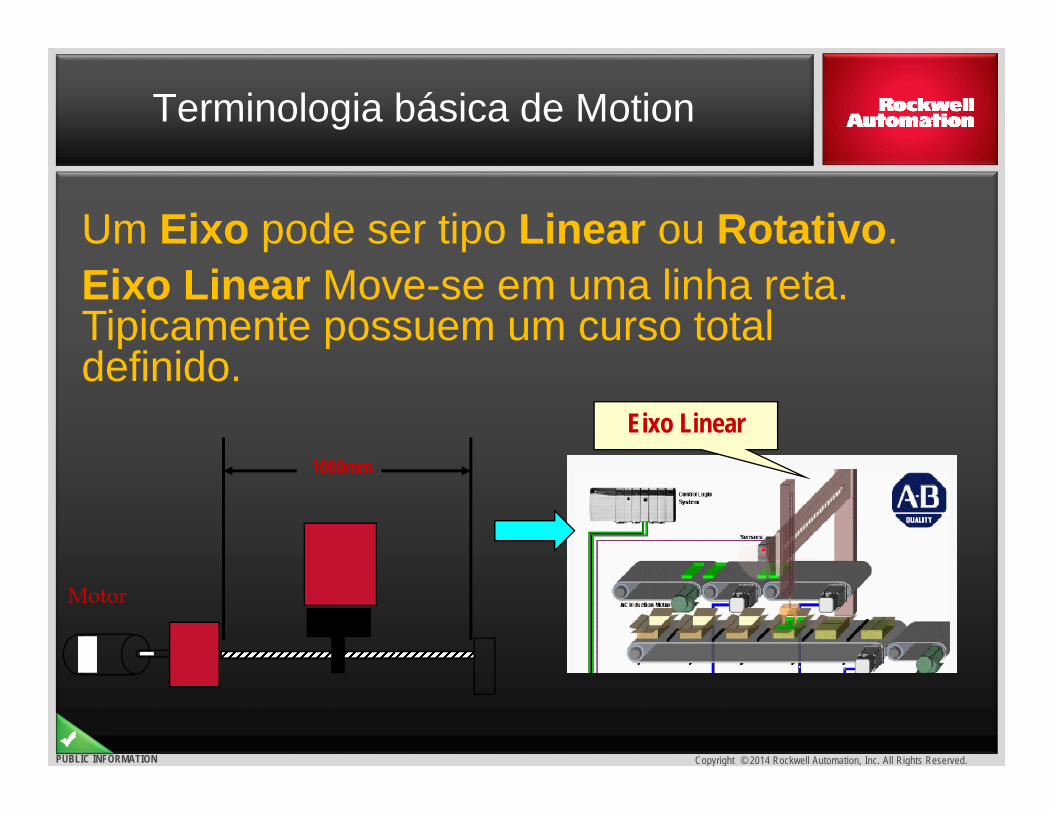
Eixo Linear Move-se em uma linha reta. Tipicamente possuem um curso total definido.
CargaMotor
1000mm
Um Eixo pode ser tipo Linear ou Rotativo.
Eixo Linear
Terminologia básica de Motion

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Eixos Rotativos giram sobre um ponto central. Uma aplicação típica é a Faca Rotativa
Rotação
Motor
Rotary Axis
Terminologia básica de Motion
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
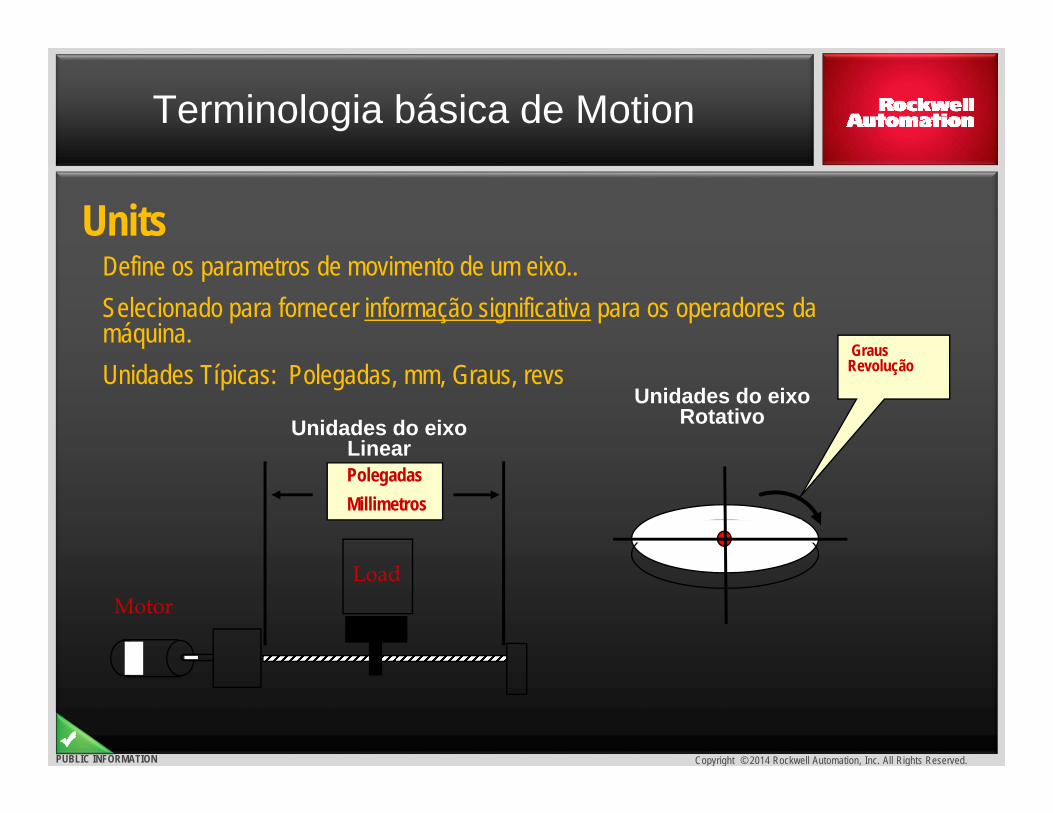
Unidades do eixoRotativo
LoadMotor
PolegadasMillimetros
Unidades do eixoLinear
Define os parametros de movimento de um eixo..Selecionado para fornecer informação significativa para os operadores da máquina. Unidades Típicas: Polegadas, mm, Graus, revs
GrausRevolução
Units
Terminologia básica de Motion
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
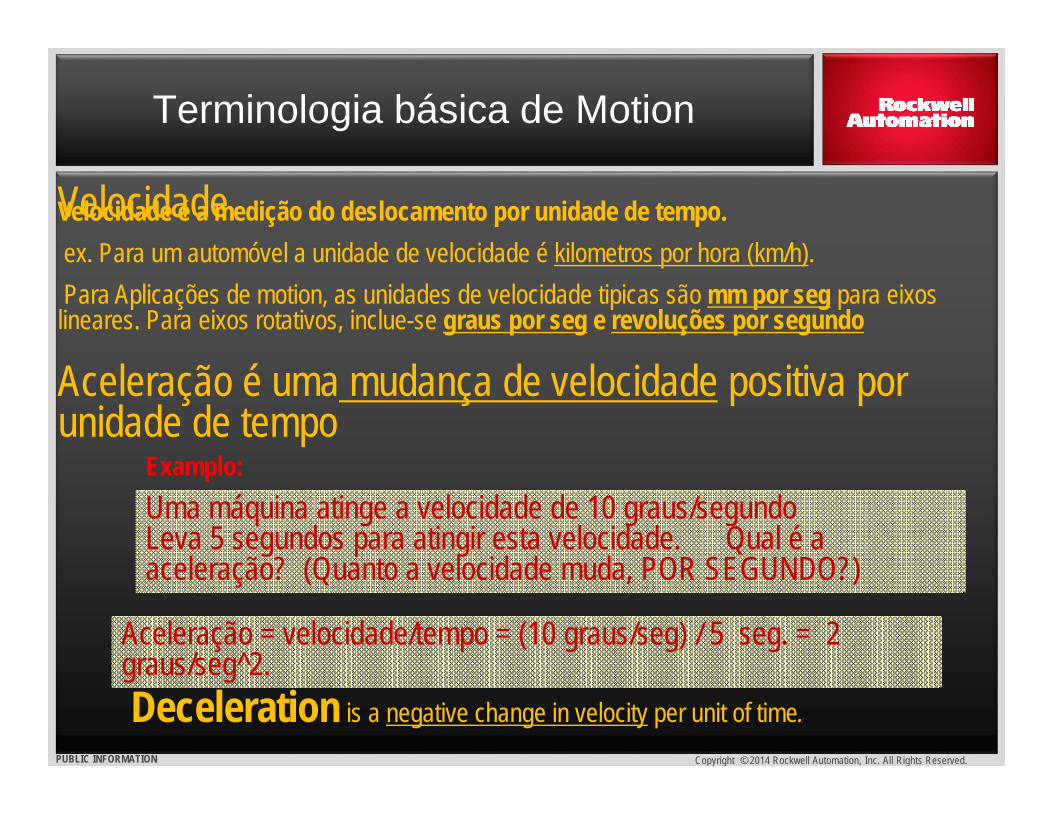
Velocidade é a medição do deslocamento por unidade de tempo.ex. Para um automóvel a unidade de velocidade é kilometros por hora (km/h).Para Aplicações de motion, as unidades de velocidade tipicas são mm por seg para eixoslineares. Para eixos rotativos, inclue-se graus por seg e revoluções por segundo
Aceleração é uma mudança de velocidade positiva porunidade de tempo
Deceleration is a negative change in velocity per unit of time.
Uma máquina atinge a velocidade de 10 graus/segundoLeva 5 segundos para atingir esta velocidade. Qual é a aceleração? (Quanto a velocidade muda, POR SEGUNDO?)
Examplo:
Velocidade
Aceleração = velocidade/tempo = (10 graus/seg) / 5 seg. = 2 graus/seg^2.
Terminologia básica de Motion
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
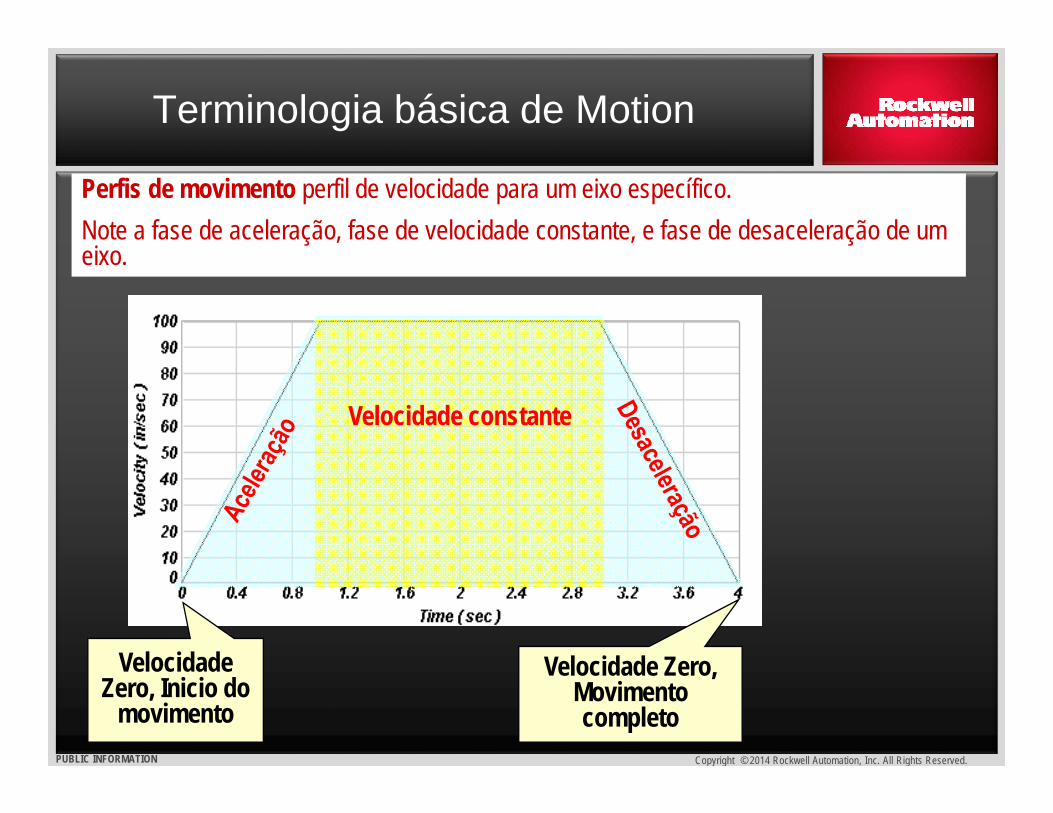
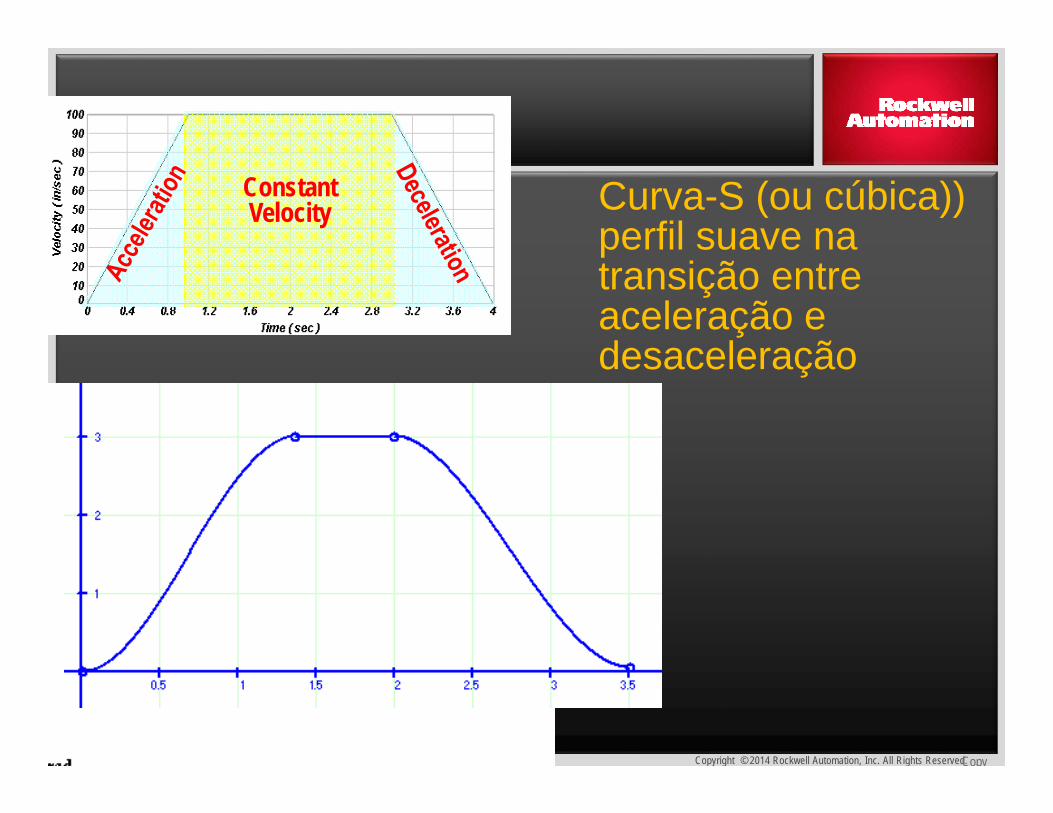
Perfis de movimento perfil de velocidade para um eixo específico.Note a fase de aceleração, fase de velocidade constante, e fase de desaceleração de um eixo.
Velocidade constante
Velocidade Zero, Movimentocompleto
VelocidadeZero, Inicio do
movimento
Terminologia básica de Motion
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
14 Constant Velocity Curva-S (ou cúbica))
perfil suave natransição entre aceleração e desaceleração

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
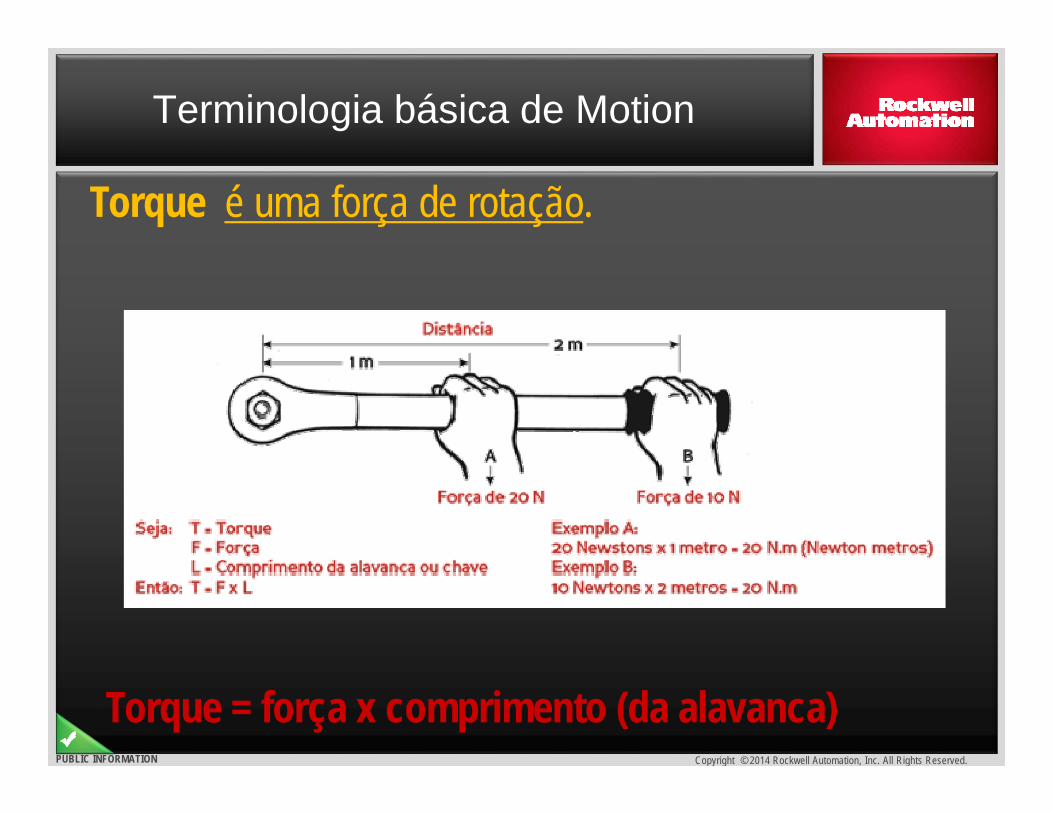
Torque é uma força de rotação.
Comprimento da alavanca
Força
Torque
Torque = força x comprimento (da alavanca)
Terminologia básica de Motion
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Torque é uma força de rotação.
Torque = força x comprimento (da alavanca)
Terminologia básica de Motion
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
17
Posicionamento do Eixo
Posição Comandada: A posição desejada de um eixo, conformegerada plao controlador de movimento
Posição atual: A posição corrente verdadeira de um eixo.
Existem dois aspectos no posicionamento de um eixo:
O objetivo do posicionamento de um eixo é minimizer a diferença entre a posição comandada e a posição atual!
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
18
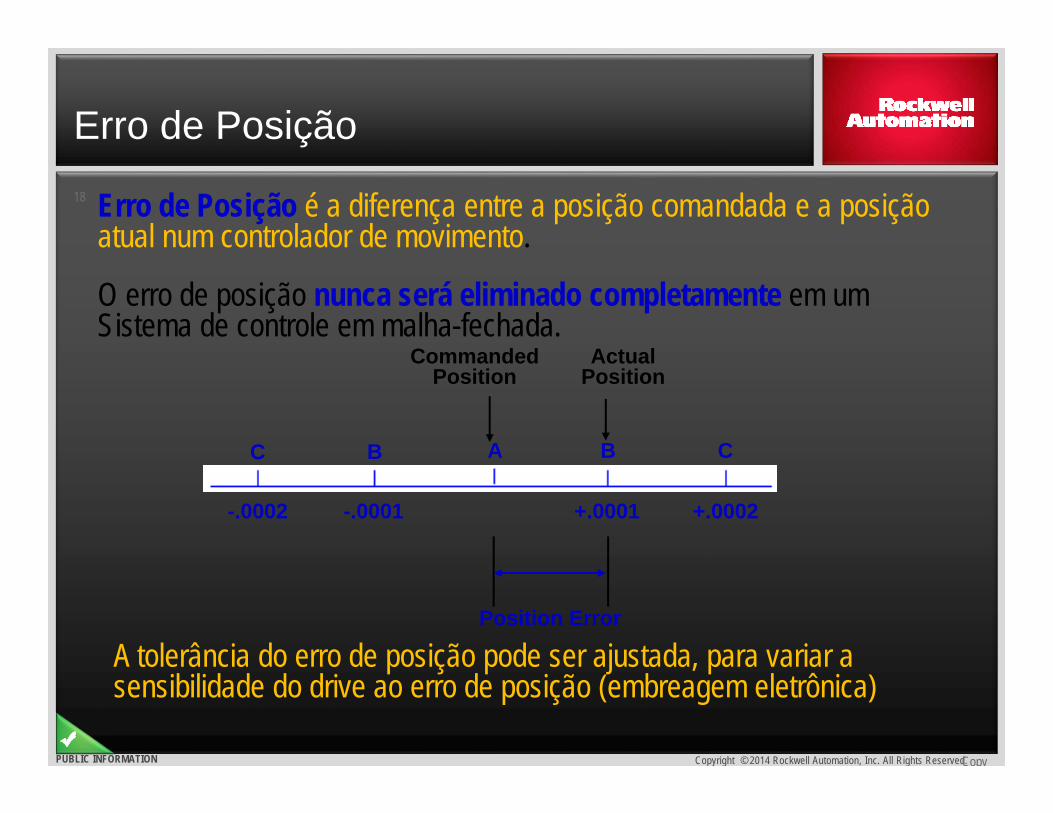
Erro de Posição
Erro de Posição é a diferença entre a posição comandada e a posiçãoatual num controlador de movimento.
A tolerância do erro de posição pode ser ajustada, para variar a sensibilidade do drive ao erro de posição (embreagem eletrônica)
C B A B C
-.0002 -.0001 +.0001 +.0002
CommandedPosition
ActualPosition
Position Error
O erro de posição nunca será eliminado completamente em um Sistema de controle em malha-fechada.
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 19
Teoria do motor DC
Atualmente, são raramente utilizados em aplicações de Motion, mas estudando a teoria de funcionamento fica mais fácil entender outros tipos de motores

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
20
Teoria do MOTOR DC
Exemplos simples de motor DC escovado: Brinquedos, vibrador de telefones Motor de partida automotivo Antigos motores elevadores industriais
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 21
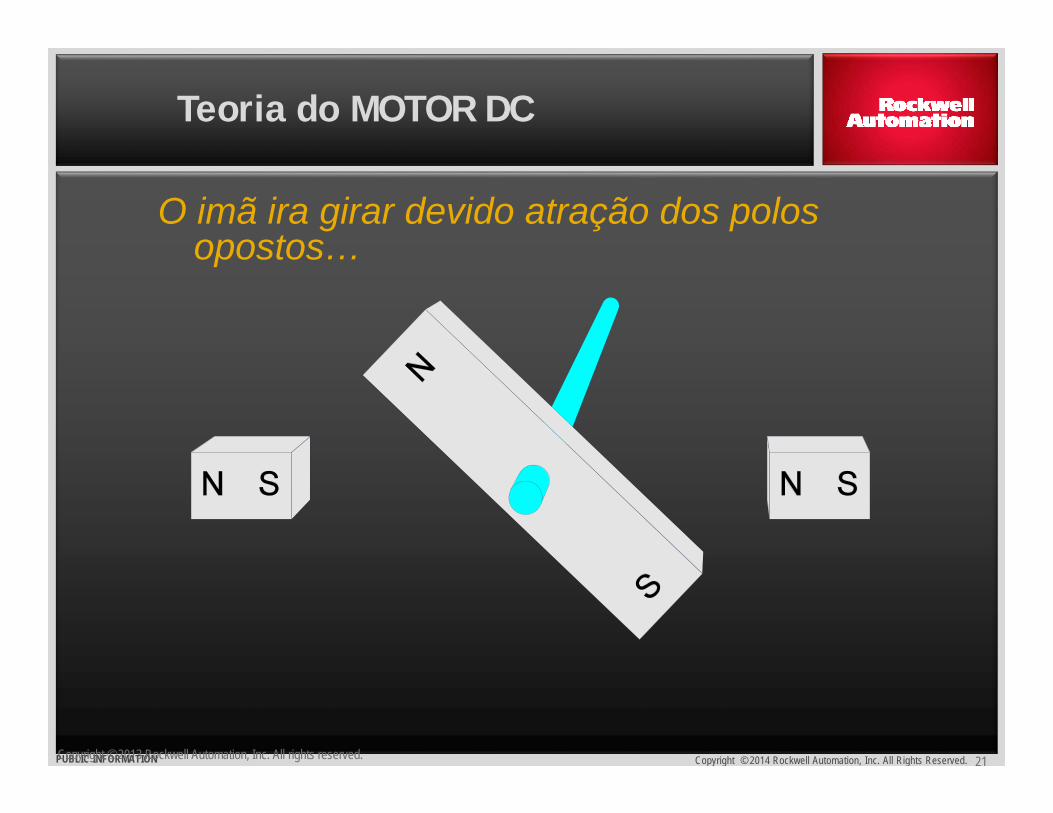
O imã ira girar devido atração dos polosopostos…
Teoria do MOTOR DC
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 22
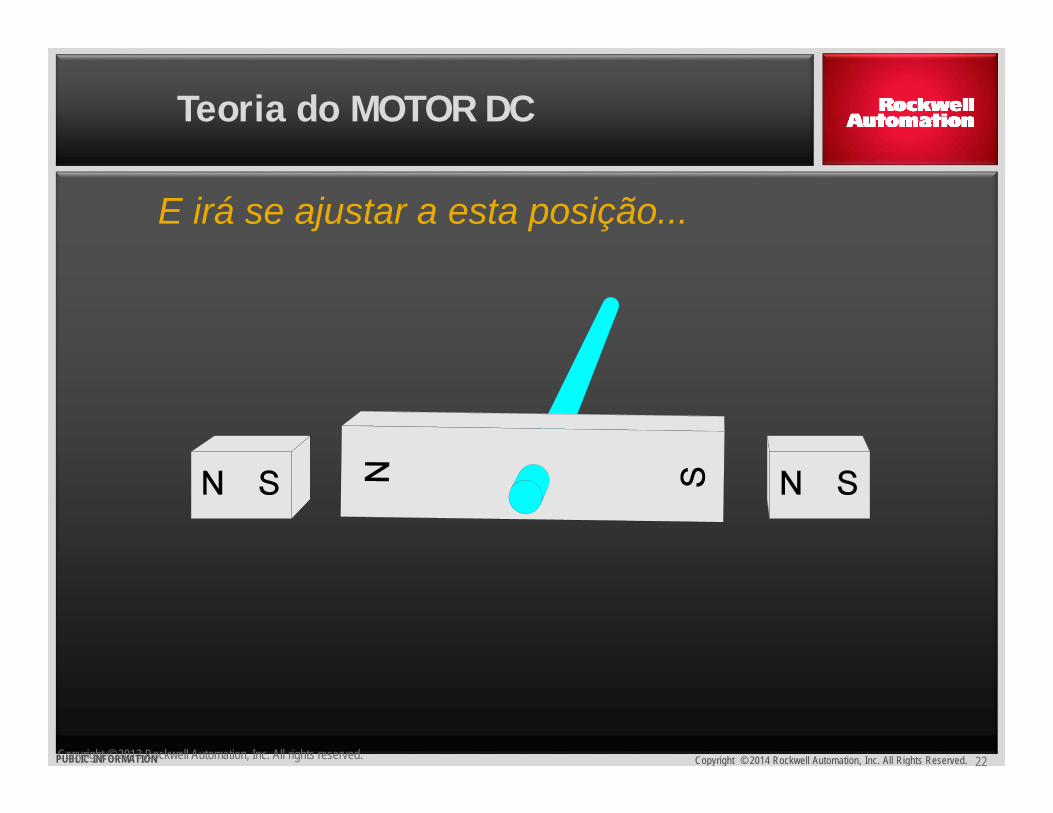
E irá se ajustar a esta posição...
Teoria do MOTOR DC
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 23
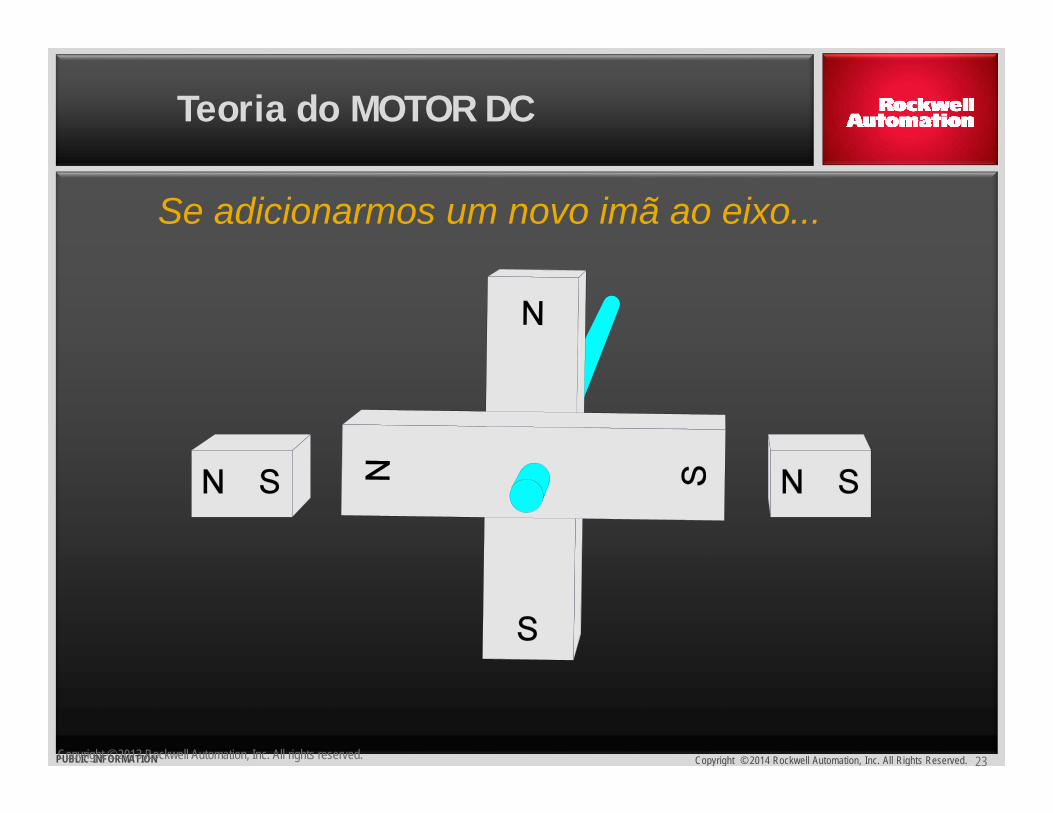
Se adicionarmos um novo imã ao eixo...
Teoria do MOTOR DC
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 24
E desmagnetizar o outro imã...
Teoria do MOTOR DC
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 25
O Segundo imã irá tentar alinhar-se com ospolos opostos...
Teoria do MOTOR DC
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 26
E se ajustará a esta nova posição...
Teoria do MOTOR DC
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 27
Se continuar chaveando os imãs conforme feitoanteriormente o eixo continuará emmovimento.
Teoria do MOTOR DC
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 28
Porém... Imãs permanetnes não podem serchaveados (ligado/desligado)
Teoria do MOTOR DC
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 29
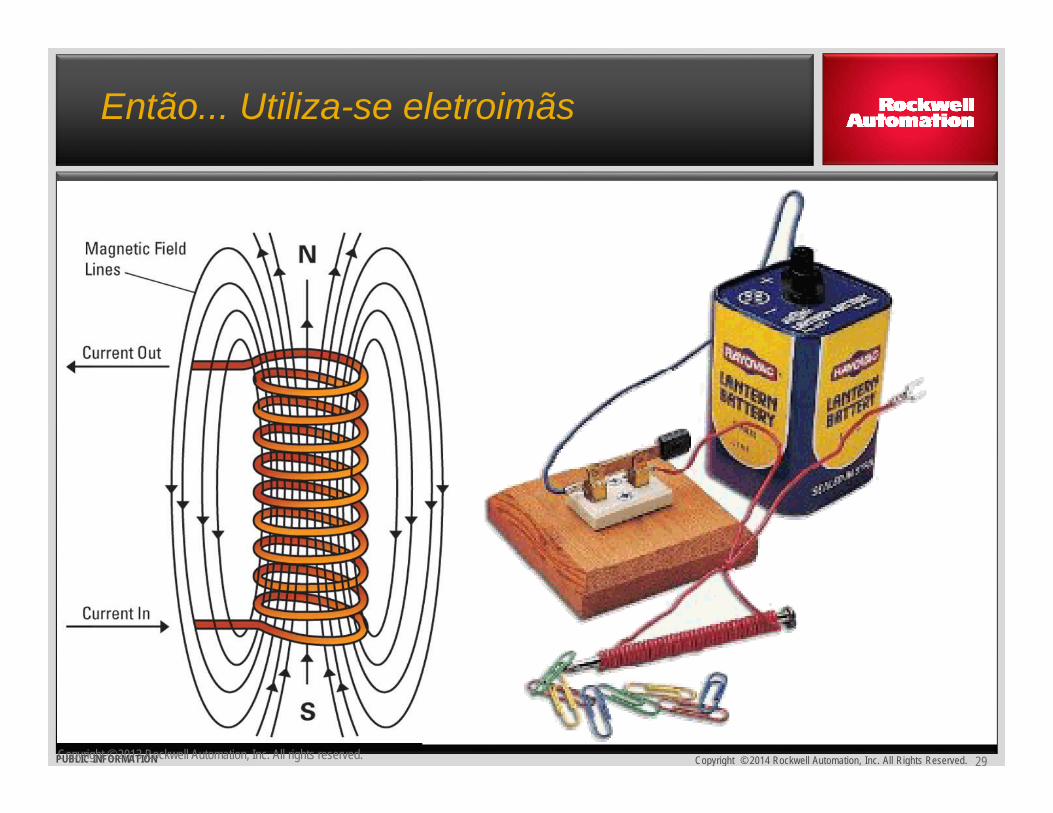
Então... Utiliza-se eletroimãs
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 30
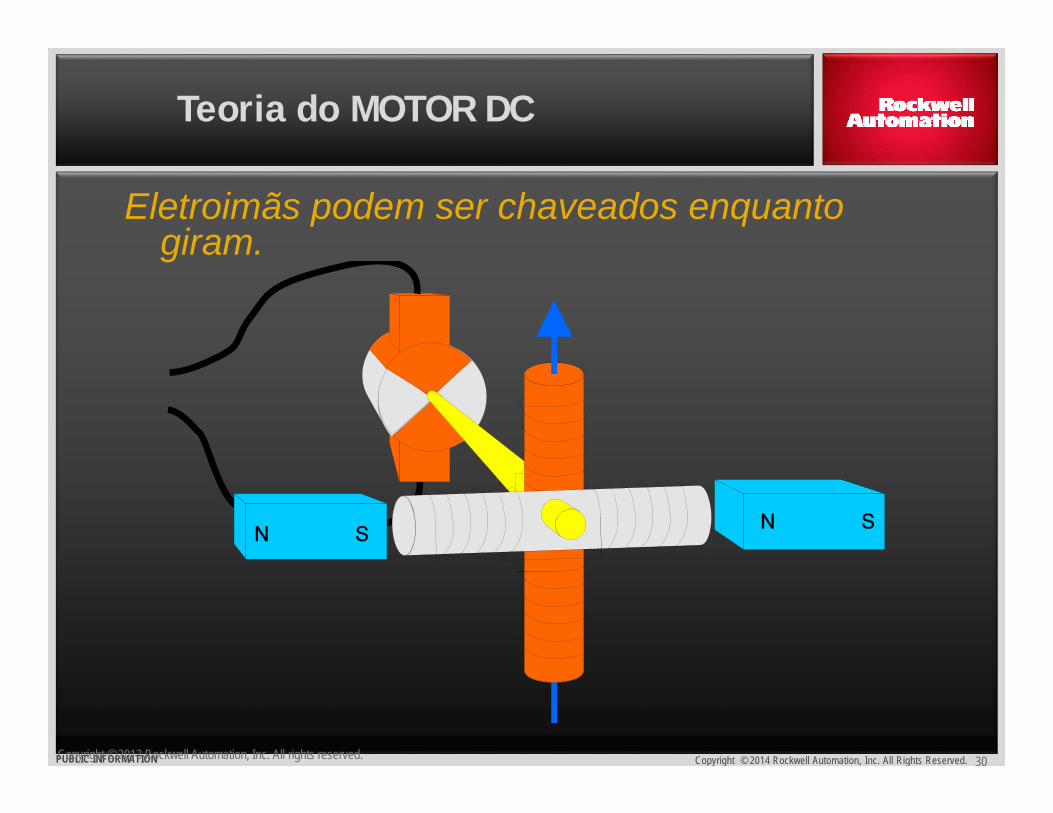
Eletroimãs podem ser chaveados enquantogiram.
Teoria do MOTOR DC
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 31
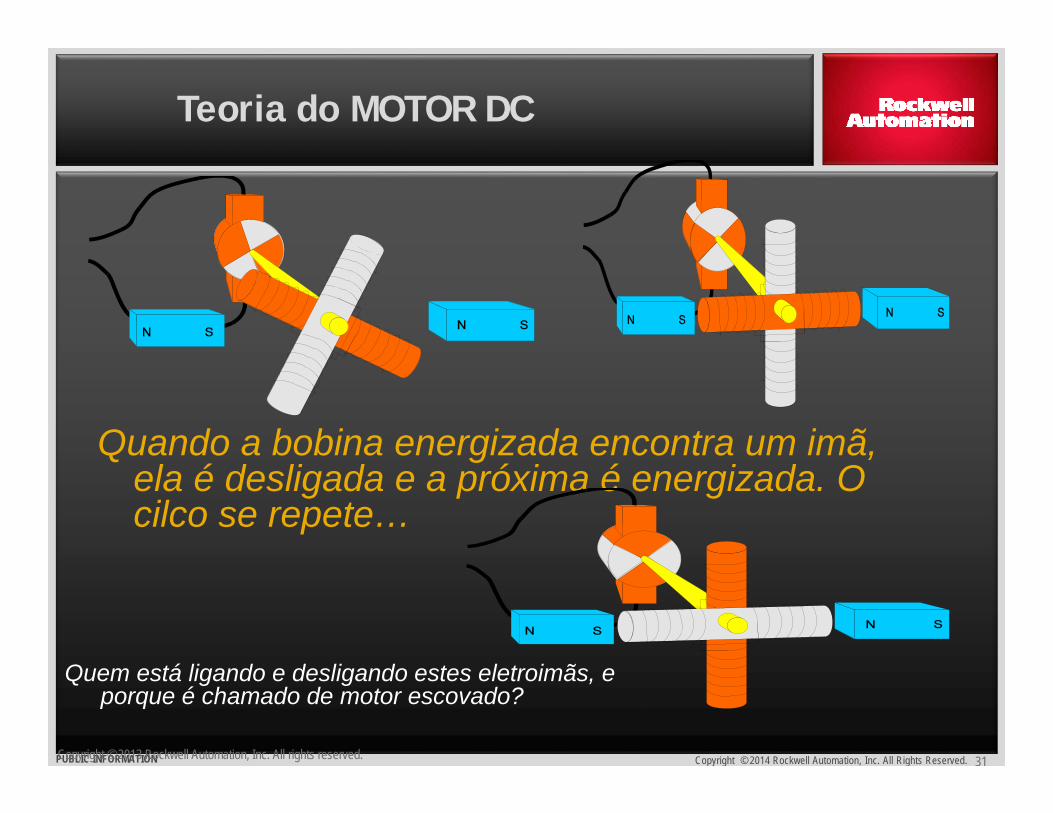
Quando a bobina energizada encontra um imã, ela é desligada e a próxima é energizada. O cilco se repete…
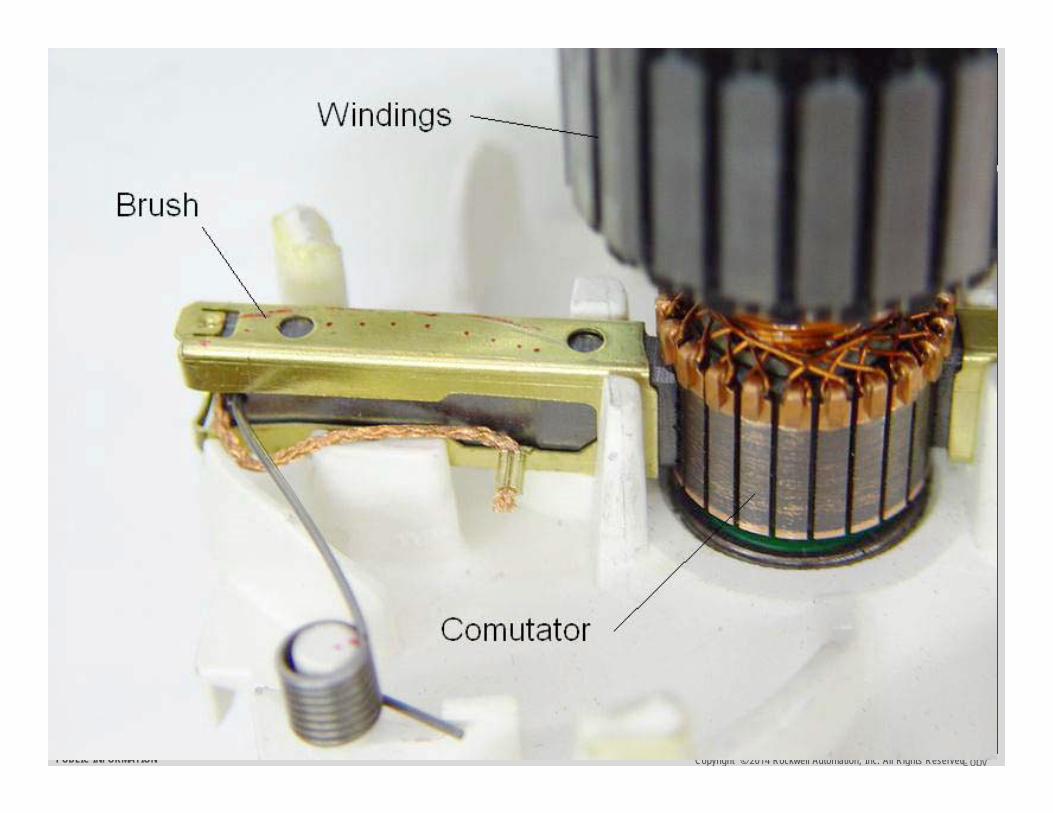
Quem está ligando e desligando estes eletroimãs, e porque é chamado de motor escovado?
Teoria do MOTOR DC
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
32

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 33
Motores AC Brushless (sem
escovas)
Para nosso propósito, motores AC são sempre Sem escovas, e motores CC são sempre com escovas . Porém existem outros casos…
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION 34
Teoria do motor BrushlessDois problemas típicos de motoresescovados:
Pobre dissipação de calor O comutador mecânico solta faíscas danificando-
se rapidamente.

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION 35
Os enrolamentos(eletroimãs) aquecem, mas não há um caminho direto para dissipar o calor
A solução é inverter a parte interna com a externa!
Teoria do motor Brushless

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 36
Um servo motor sem escovaspossui o imãpermanente no rotorE o enrolamentono estator…
Imãs
O calor das bobinas vão diretamente para carcaça, e não tem o desgaste das escovas e comutadoresSem comutadores que liga e desliga as bobinas?
Teoria do motor Brushless
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION 37
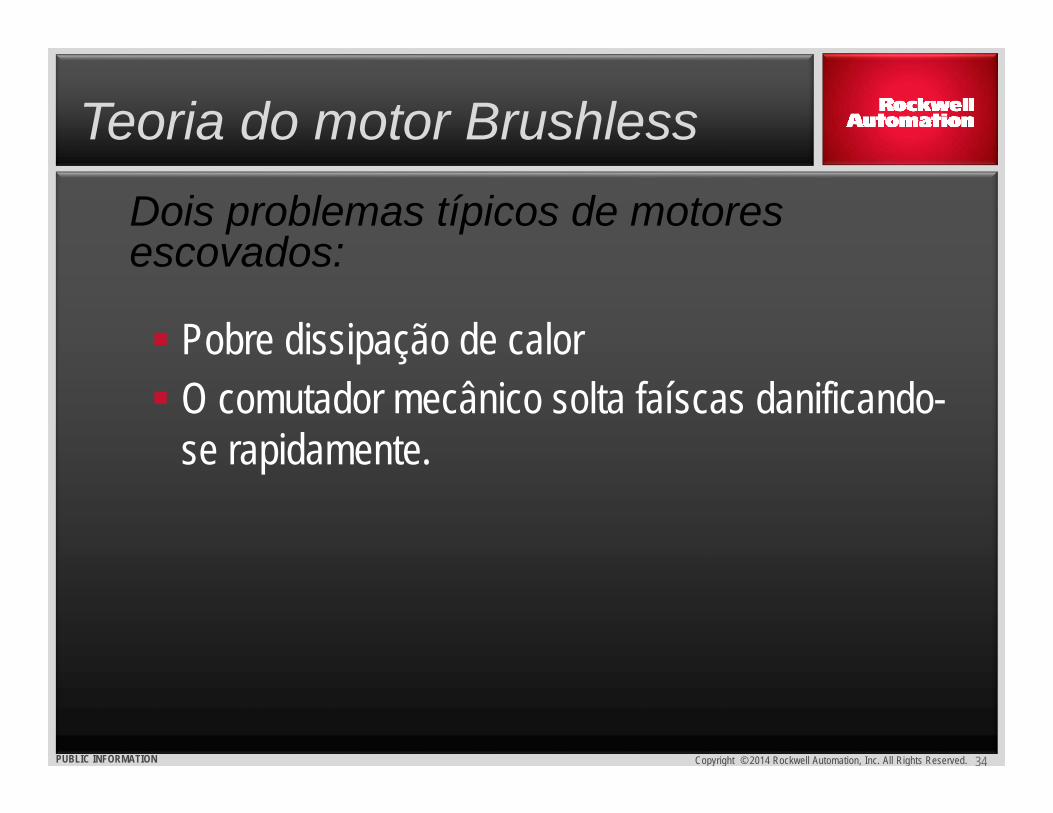
Quando os enrolamentos são energizados com uma corrente senoidal, um campo magnéticorotacional é produzido.
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION 38
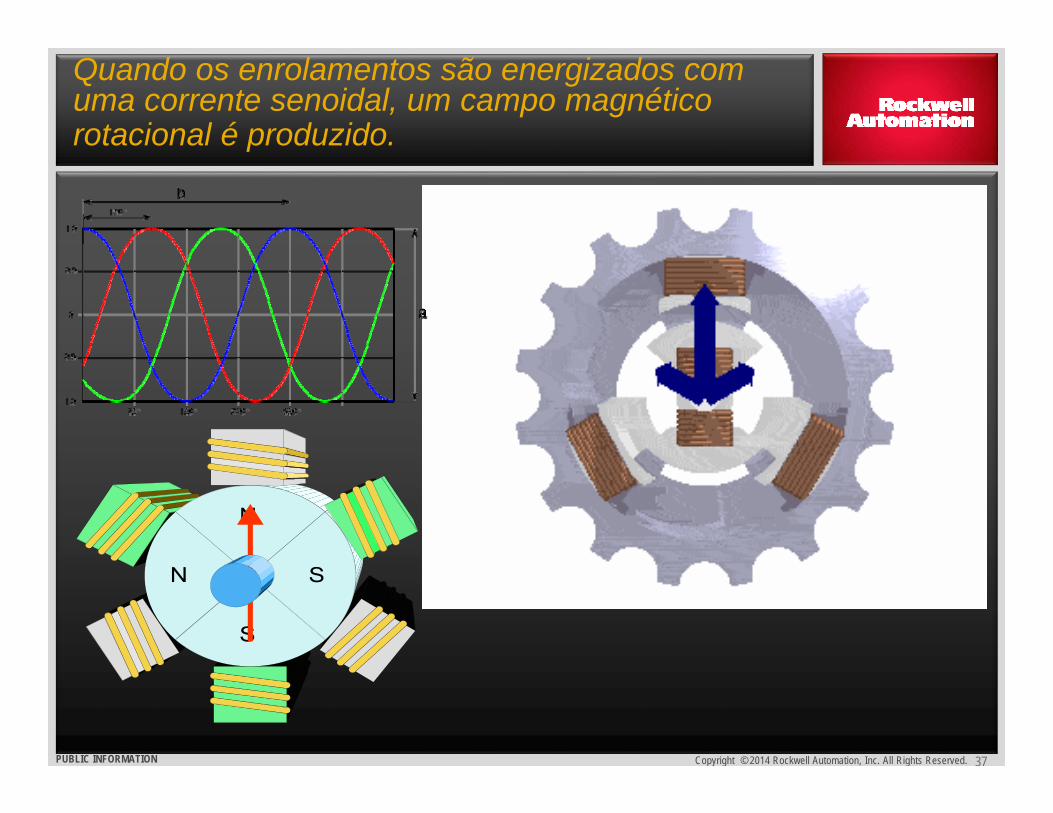
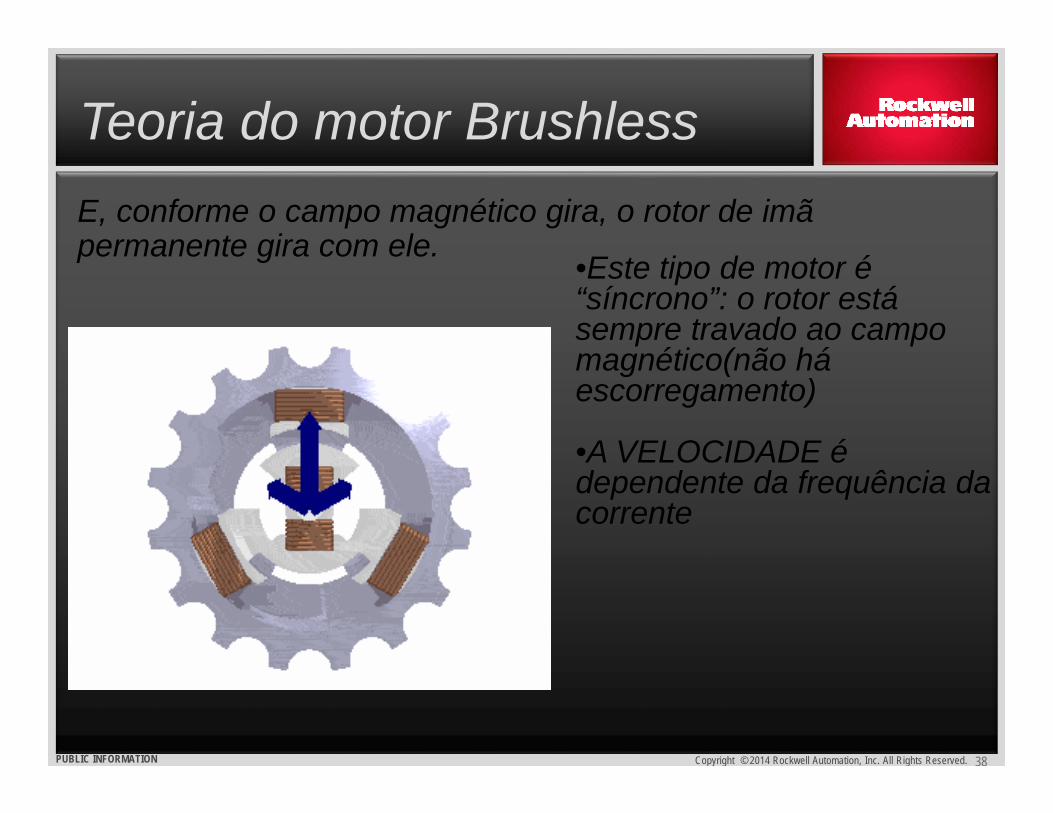
E, conforme o campo magnético gira, o rotor de imãpermanente gira com ele.
•Este tipo de motor é “síncrono”: o rotor estásempre travado ao campo magnético(não háescorregamento)
•A VELOCIDADE é dependente da frequência da corrente
Teoria do motor Brushless

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION 39
Descrevemos o motor AC sem escovas tipo “imãpermanente” (PM).
•Sumário: É um conceito similar aomotor escovado DC exceto:
• As posições de imã e eletroimã sãoinvertidas
• A comutação é feita externamenteao motor
(SERVO motores para Motion Control são normalmentesmotores PM)
Existe ainda um outro tipo de motor AC sem escovas…

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
40
AC Induction motor Very common throughout industry and
consumer appliances, because
Cheap to Build No exotic permanent magnets
needed Cheap to Control**
“Across the Line” starting single-phase operation possible
(permanent-split-capacitor (PSC) or shaded pole, or start/run winding)
• ** this trend is slowly reversing. The complex power and electronic components of Drives have plummeted in cost, and wordlwide “green” initiatives favor the efficiency of PM motors
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
41
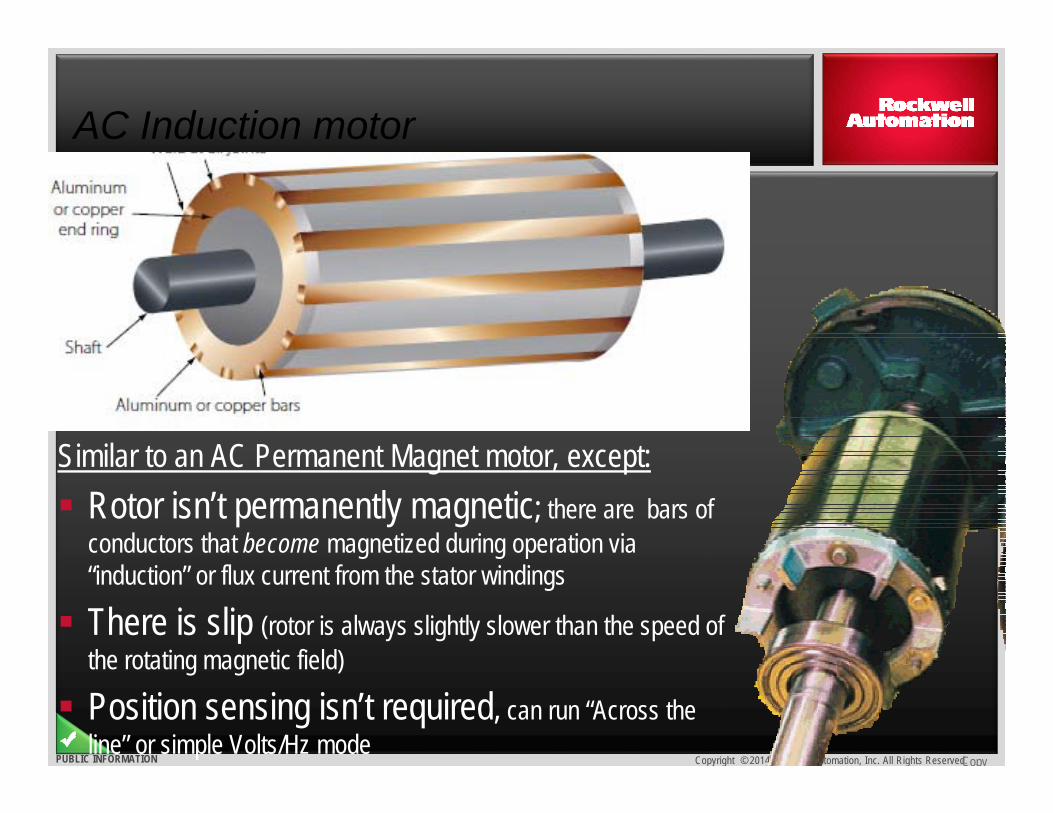
AC Induction motor
Similar to an AC Permanent Magnet motor, except: Rotor isn’t permanently magnetic; there are bars of
conductors that become magnetized during operation via “induction” or flux current from the stator windings
There is slip (rotor is always slightly slower than the speed of the rotating magnetic field)
Position sensing isn’t required, can run “Across the line” or simple Volts/Hz mode

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 42
Driving AC brushless motors

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
43
terminology VFD – “Variable Frequency Drive” –
used for induction motors Servo Drive –
used for permanent magnet servo motors
• VFD vs Servo drives: – different control algorithms– Different commutation and
feedback strategiesBut….
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
44
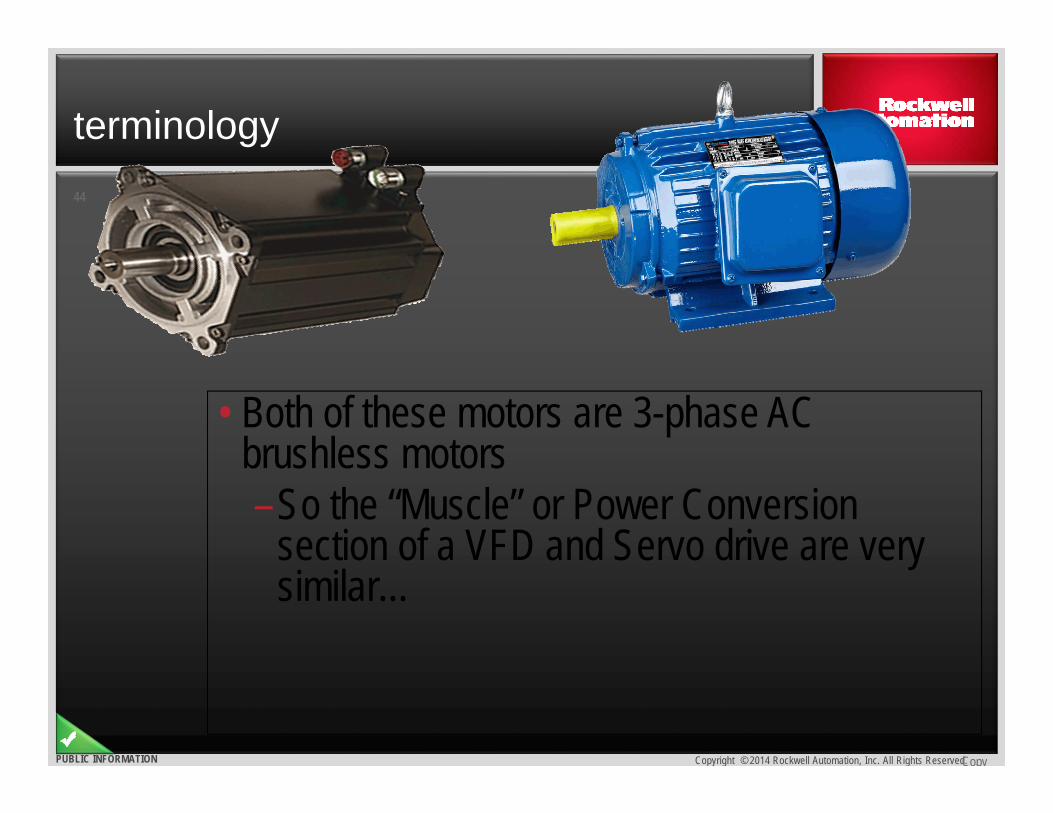
terminology
• Both of these motors are 3-phase AC brushless motors –So the “Muscle” or Power Conversion
section of a VFD and Servo drive are very similar…
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
45
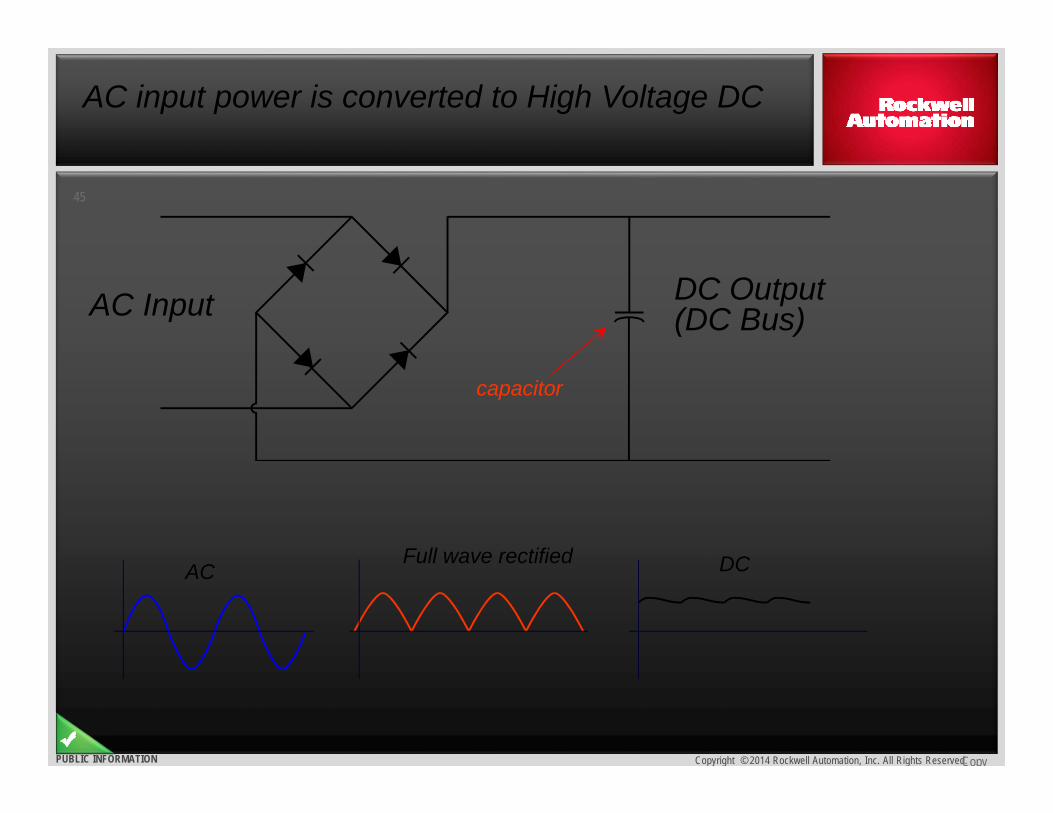
AC input power is converted to High Voltage DC
AC Input DC Output(DC Bus)
ACFull wave rectified DC
capacitor
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
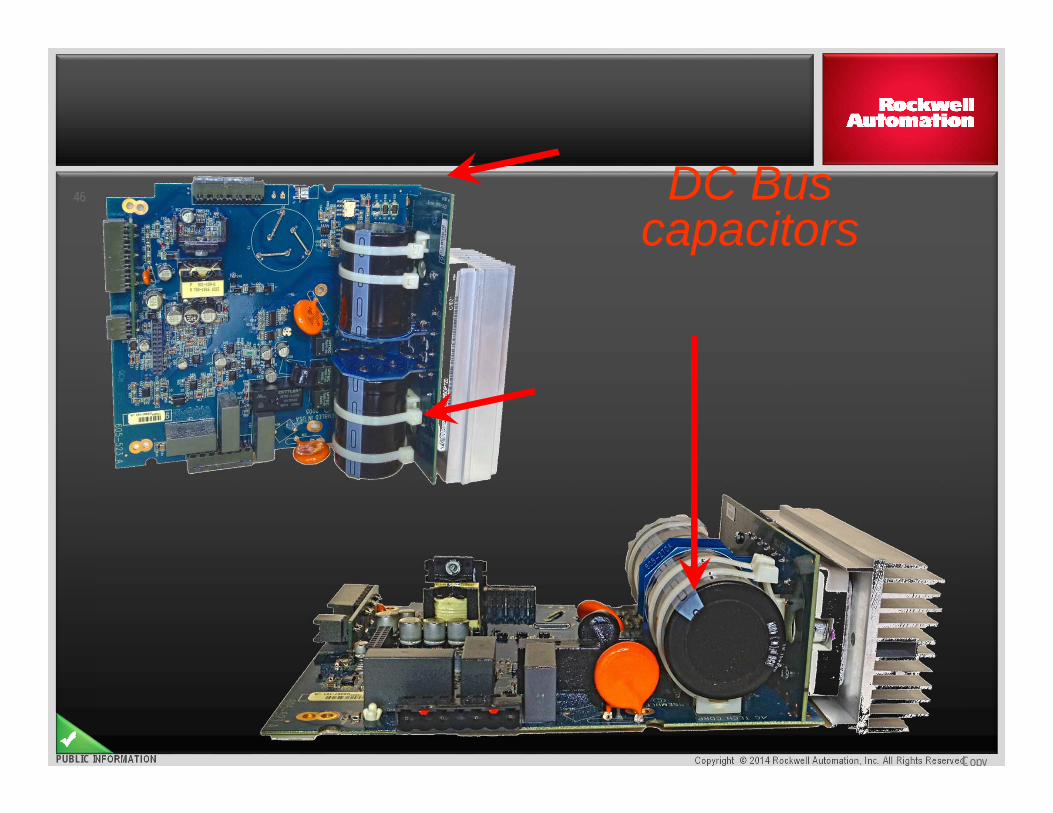
46 DC Bus capacitors
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION 47
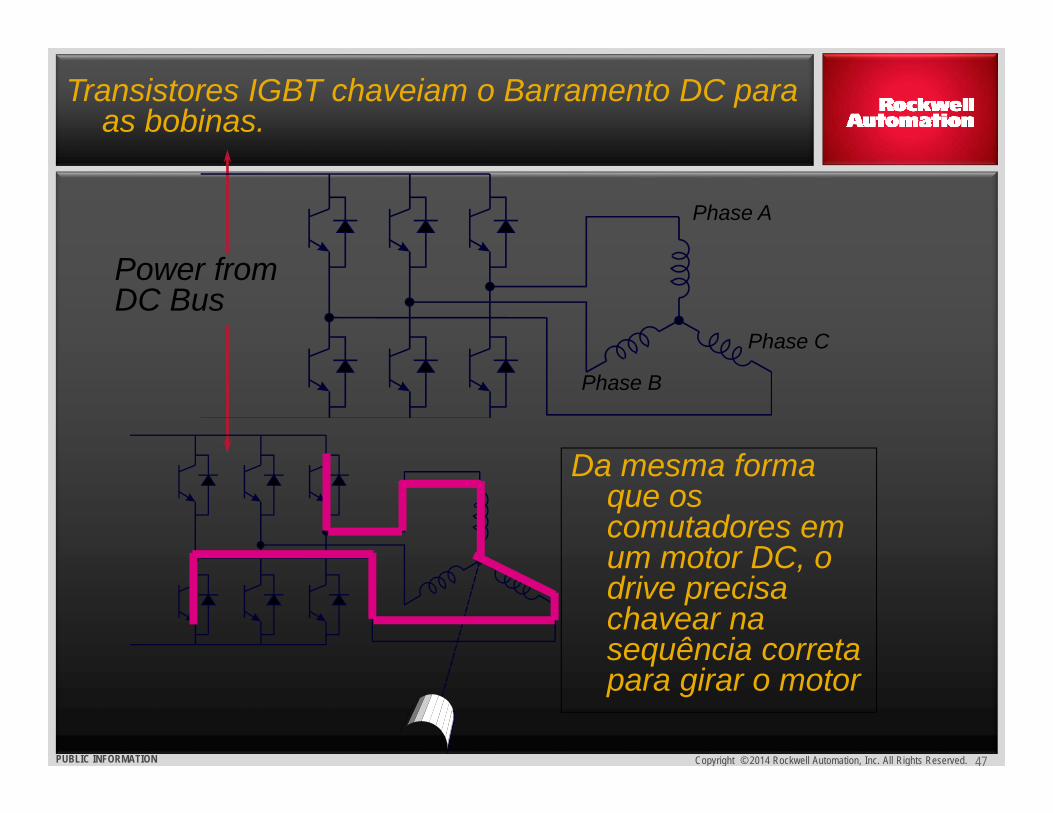
Transistores IGBT chaveiam o Barramento DC para as bobinas.
Power fromDC Bus
Phase A
Phase B
Phase C
Da mesma forma que oscomutadores emum motor DC, o drive precisachavear nasequência corretapara girar o motor
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
48 IGBT (Transistor Bipolar de
PortaIsolada)
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
49
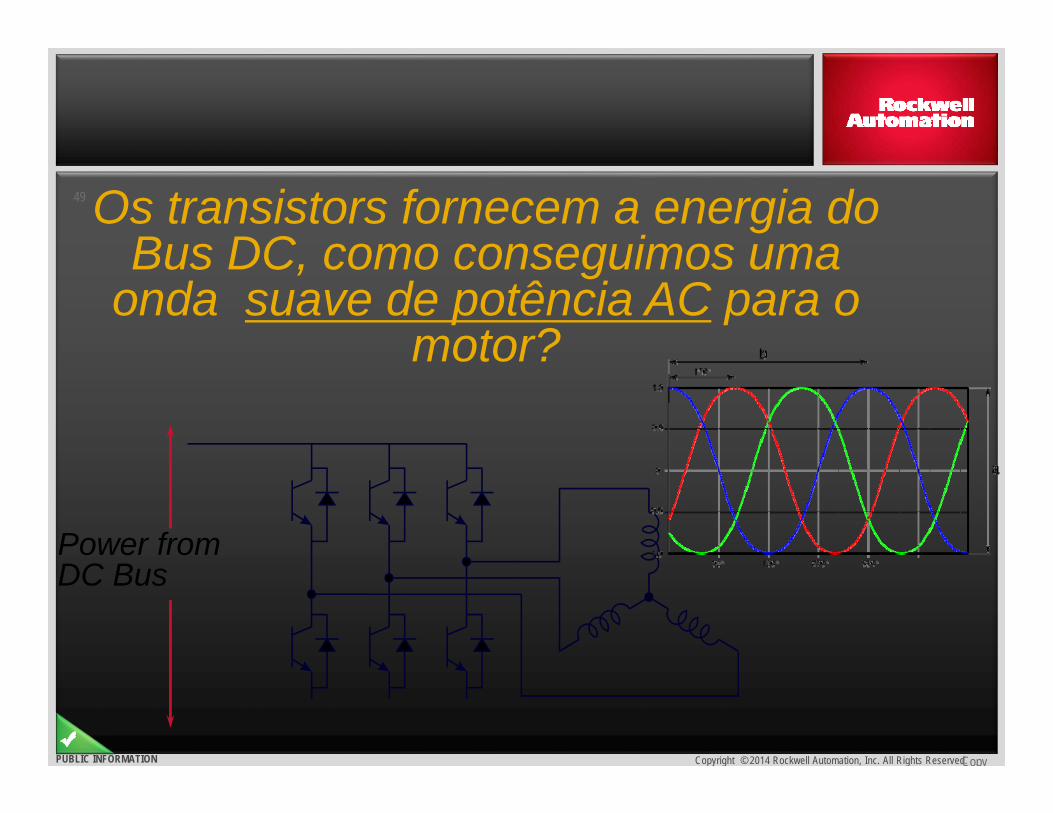
Power fromDC Bus
Os transistors fornecem a energia do Bus DC, como conseguimos uma
onda suave de potência AC para o motor?
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
50
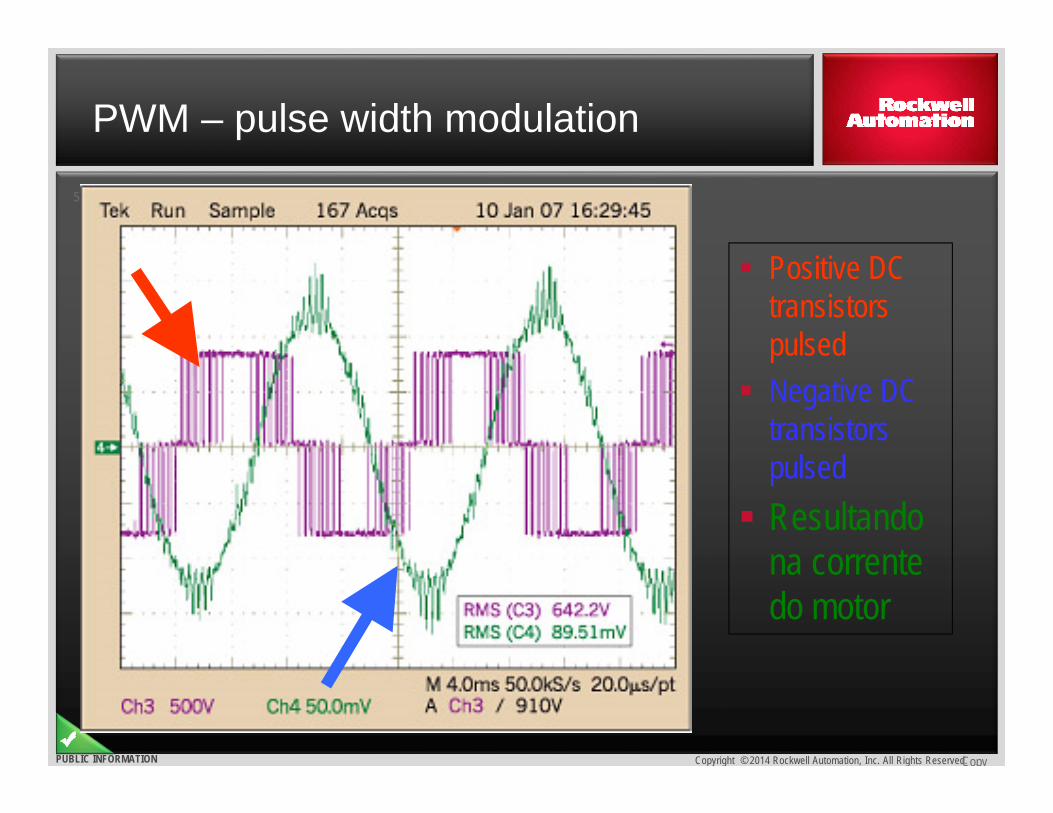
Positive DC transistors pulsed
Negative DC transistors pulsed Resultando
na correntedo motor
PWM – pulse width modulation
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 51
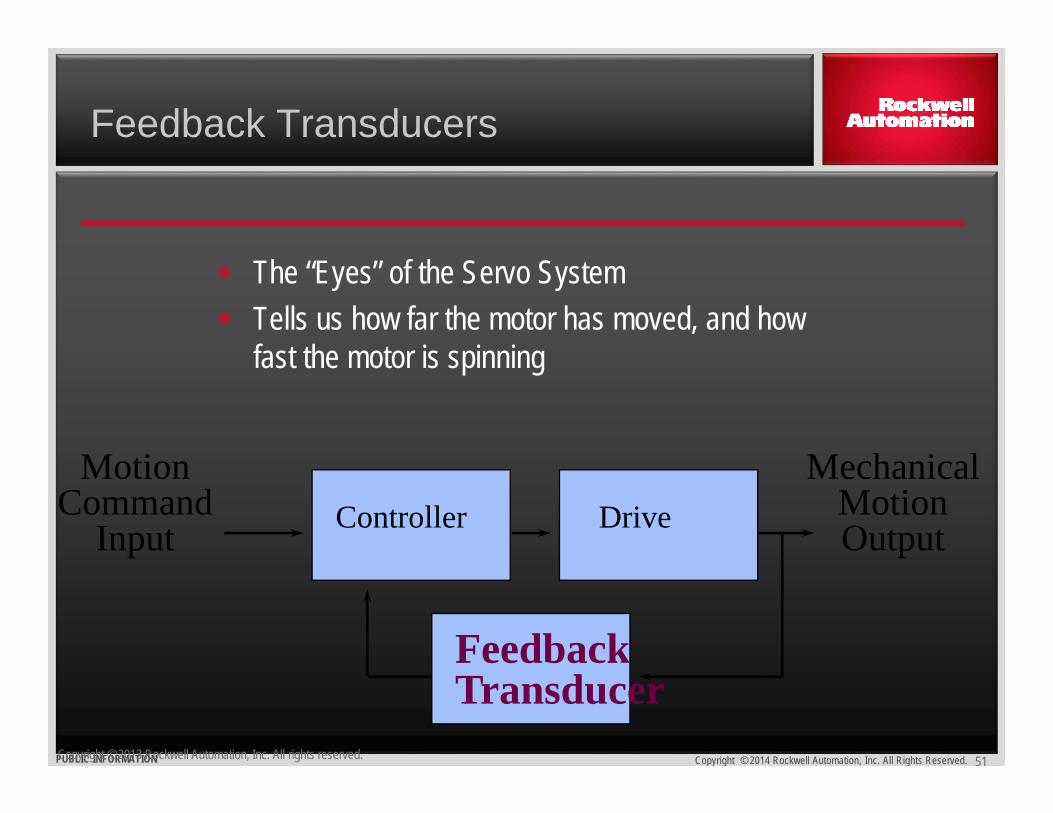
Feedback Transducers
The “Eyes” of the Servo System Tells us how far the motor has moved, and how
fast the motor is spinning
MotionCommand
Input Controller DriveMechanical
MotionOutput
FeedbackTransducer
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION 52Copyright © 2012 Rockwell Automation, Inc. All rights reserved. 52
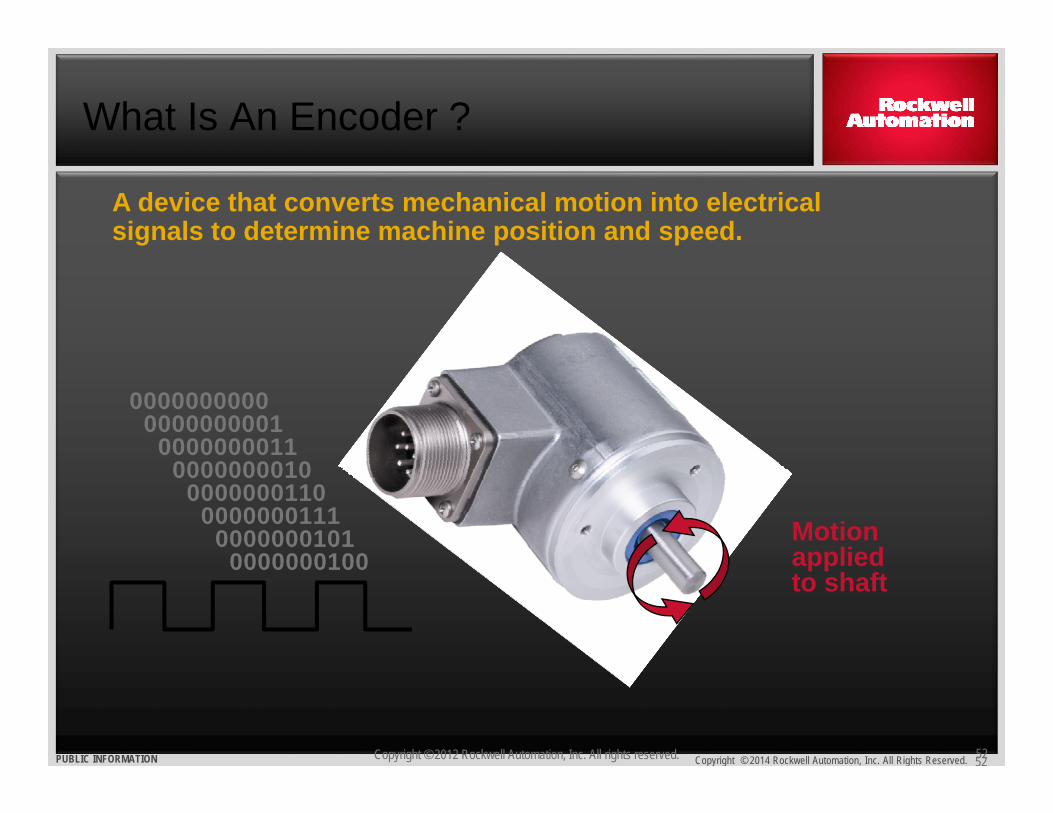
What Is An Encoder ?
00000000000000000001000000001100000000100000000110000000011100000001010000000100
Motionappliedto shaft
A device that converts mechanical motion into electrical signals to determine machine position and speed.
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
53
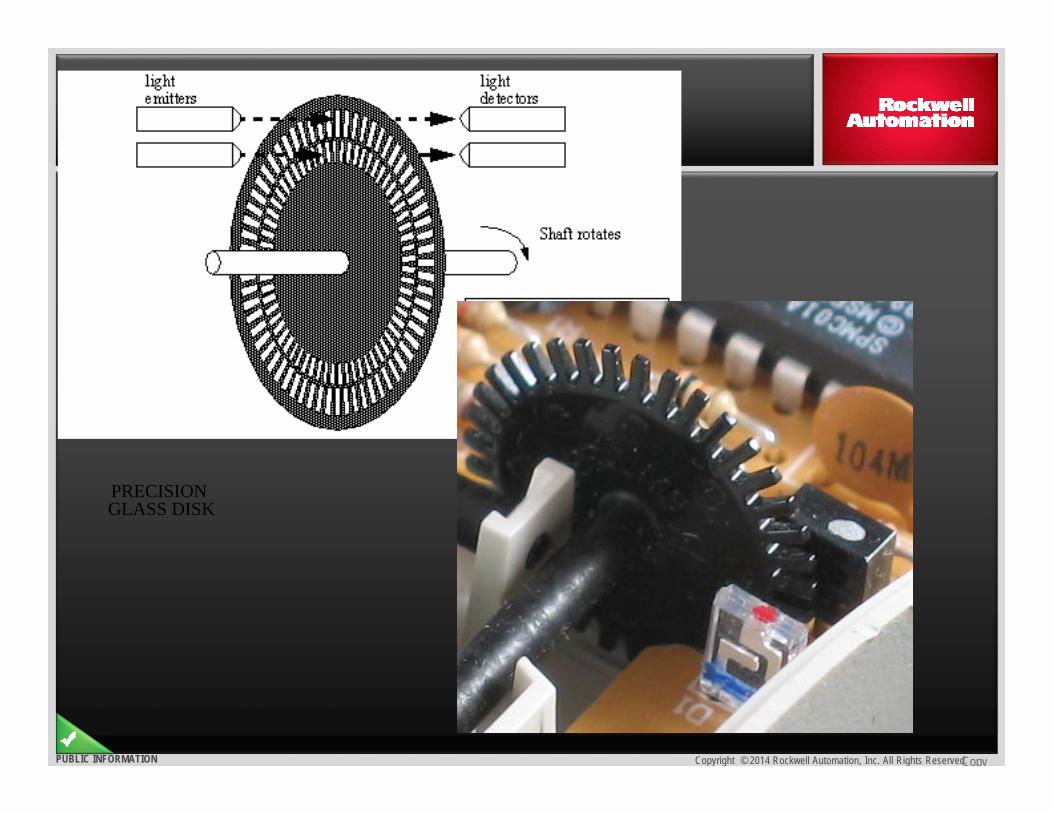
PRECISION GLASS DISK
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 54
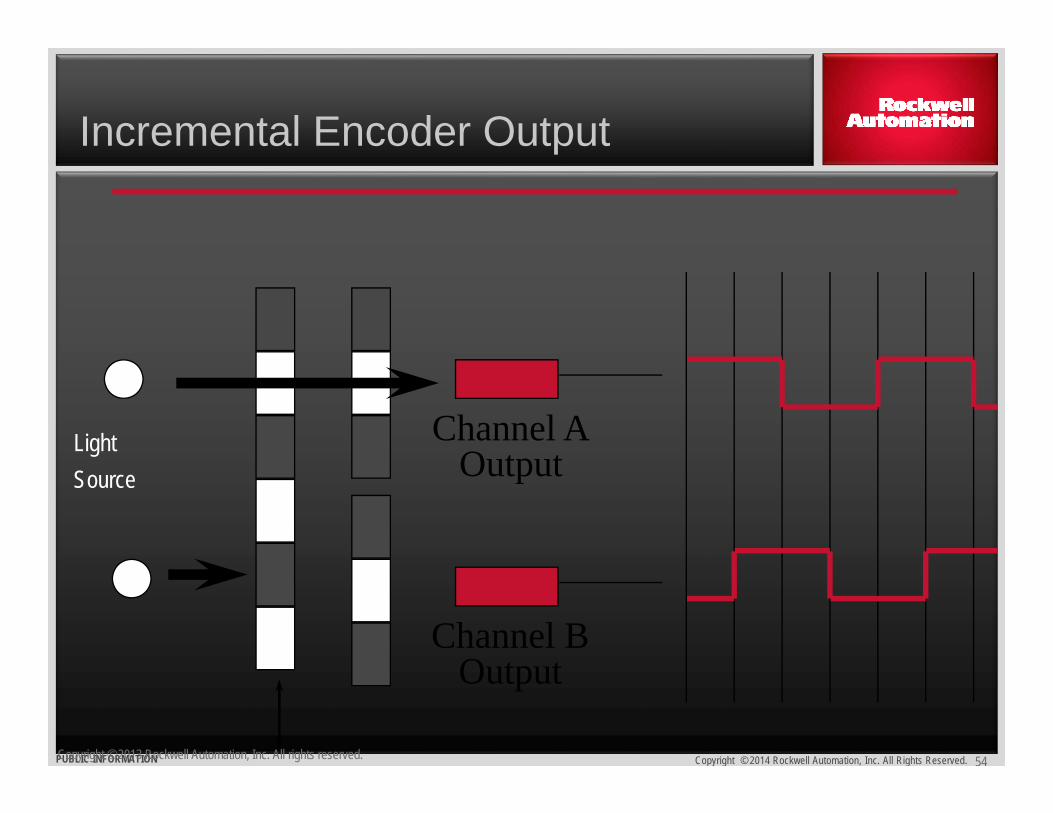
Incremental Encoder Output
LightSource
Channel AOutput
Channel BOutput
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
55
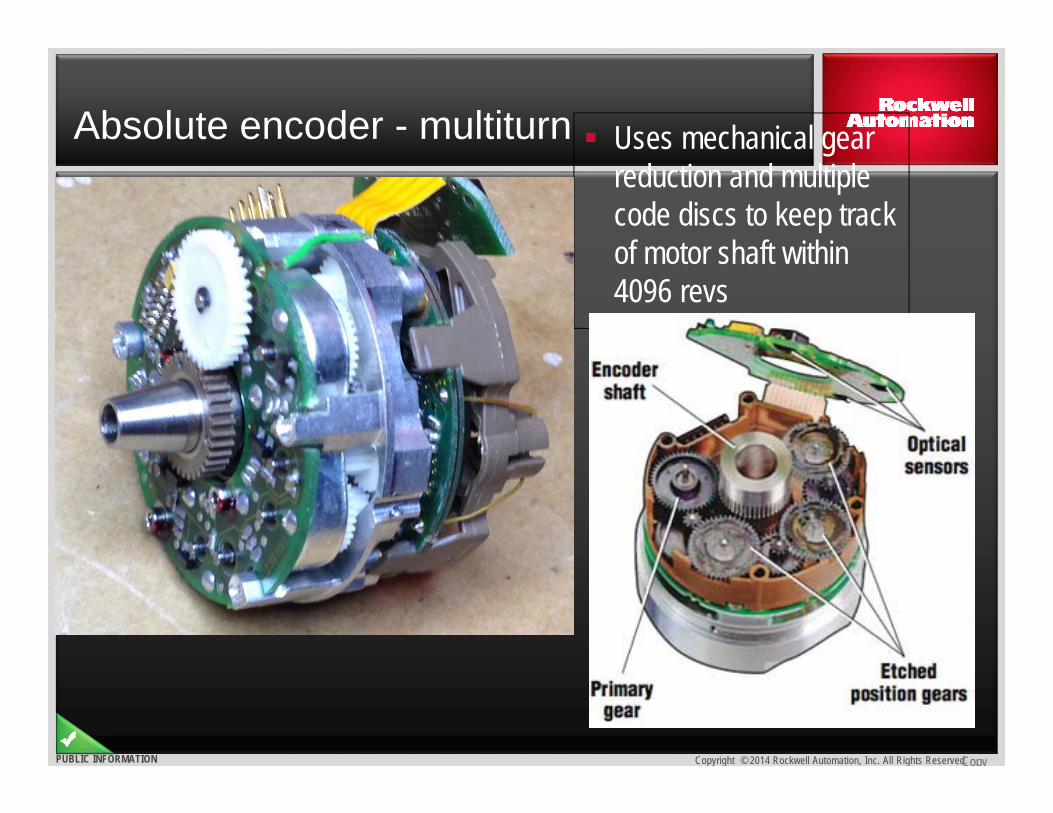
Absolute encoder - multiturn Uses mechanical gear reduction and multiple code discs to keep track of motor shaft within 4096 revs
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
58
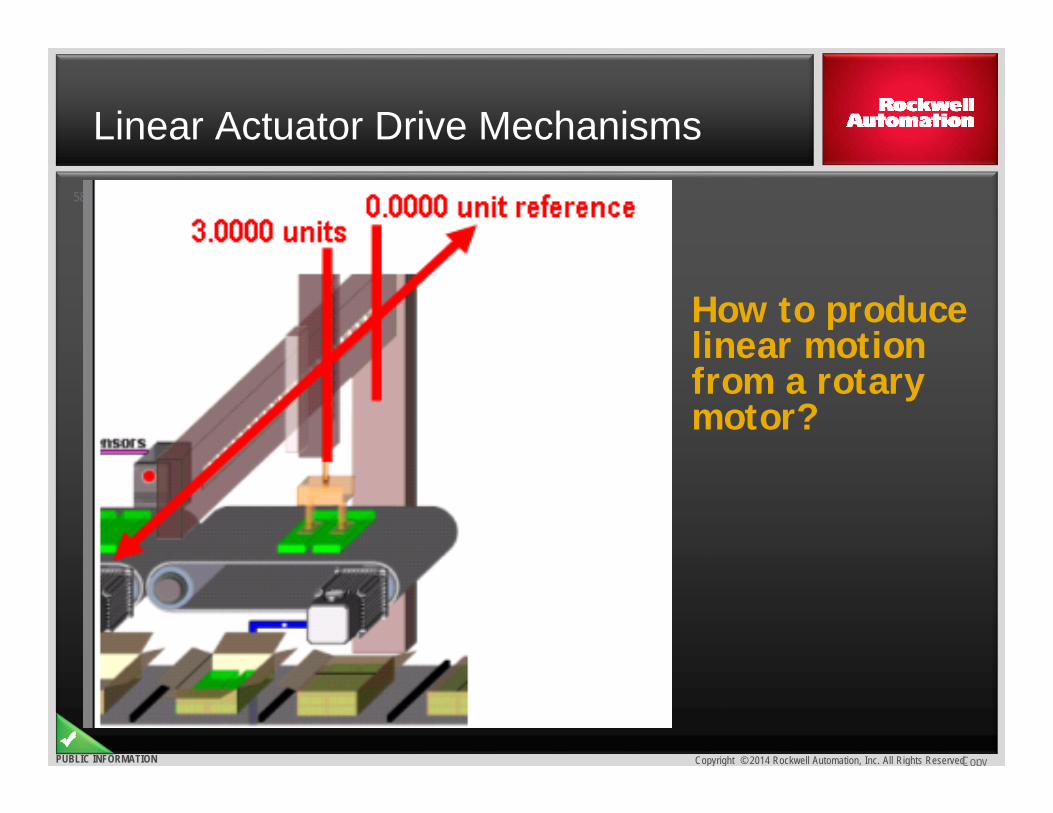
Linear Actuator Drive Mechanisms
How to produce linear motion from a rotary motor?
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
59
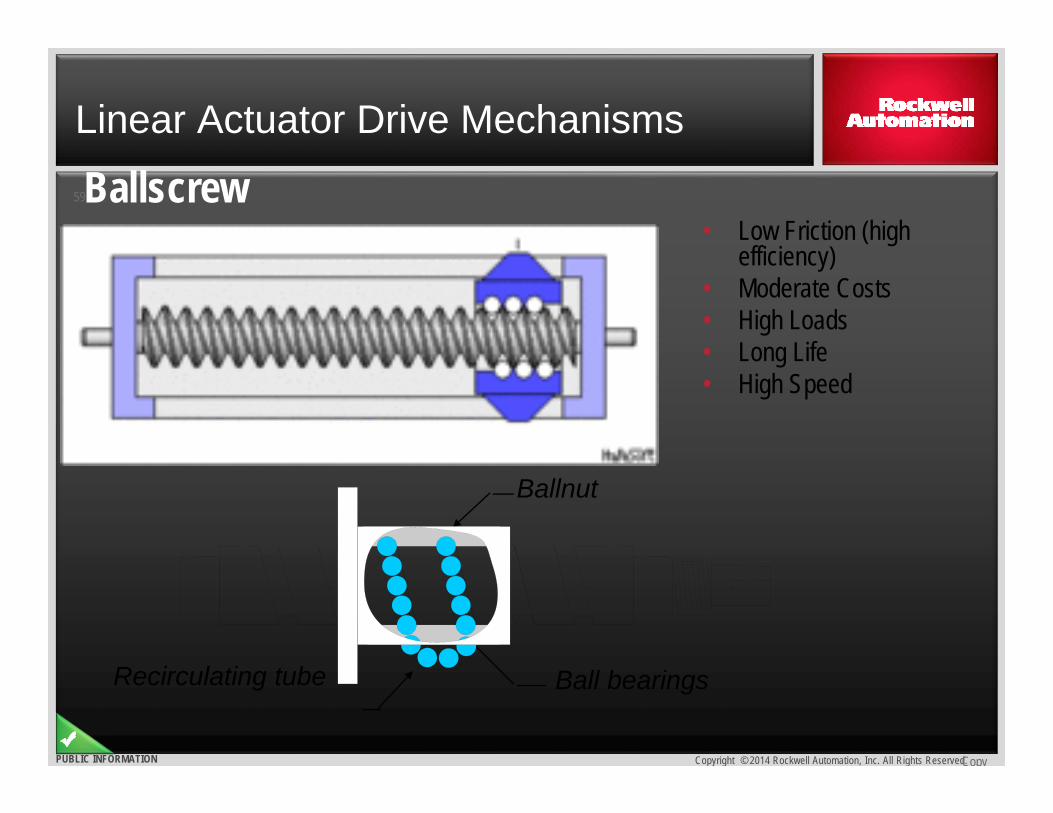
Linear Actuator Drive Mechanisms
Ballscrew
Ball bearings
Ballnut
Recirculating tube
• Low Friction (high efficiency)
• Moderate Costs• High Loads• Long Life• High Speed
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
60
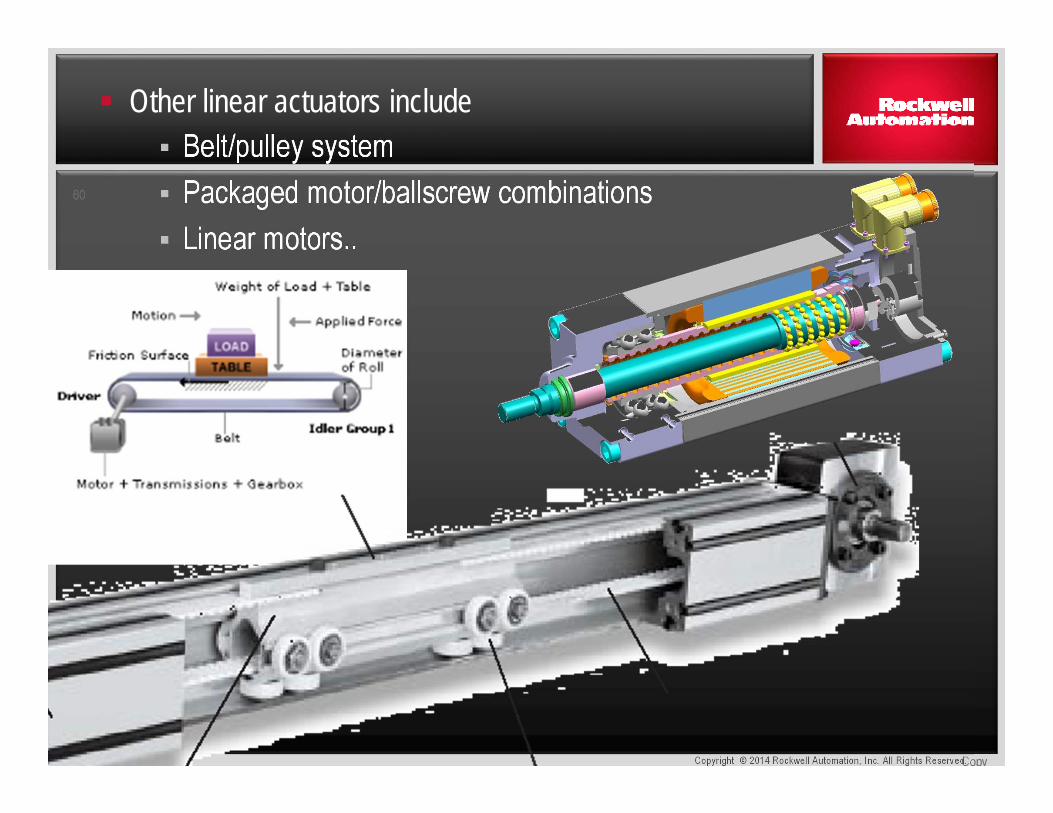
Other linear actuators include Belt/pulley system Packaged motor/ballscrew combinations Linear motors..
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
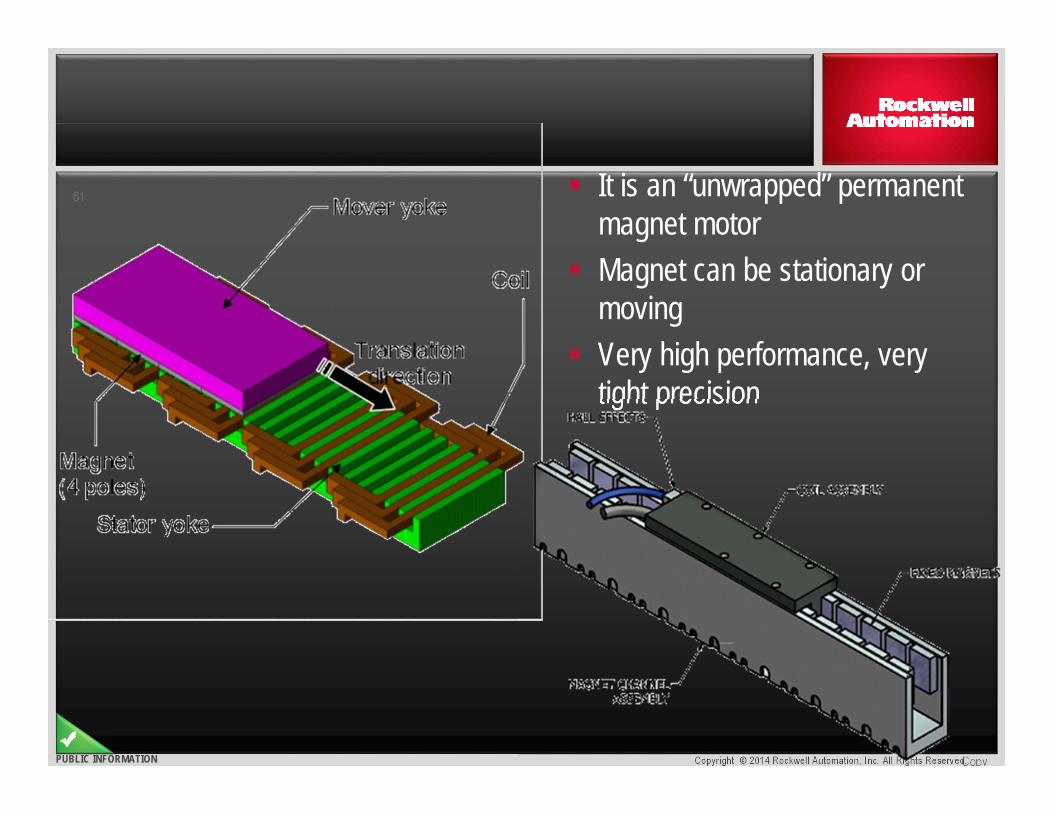
61 It is an “unwrapped” permanent magnet motor
Magnet can be stationary or moving
Very high performance, very tight precision
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
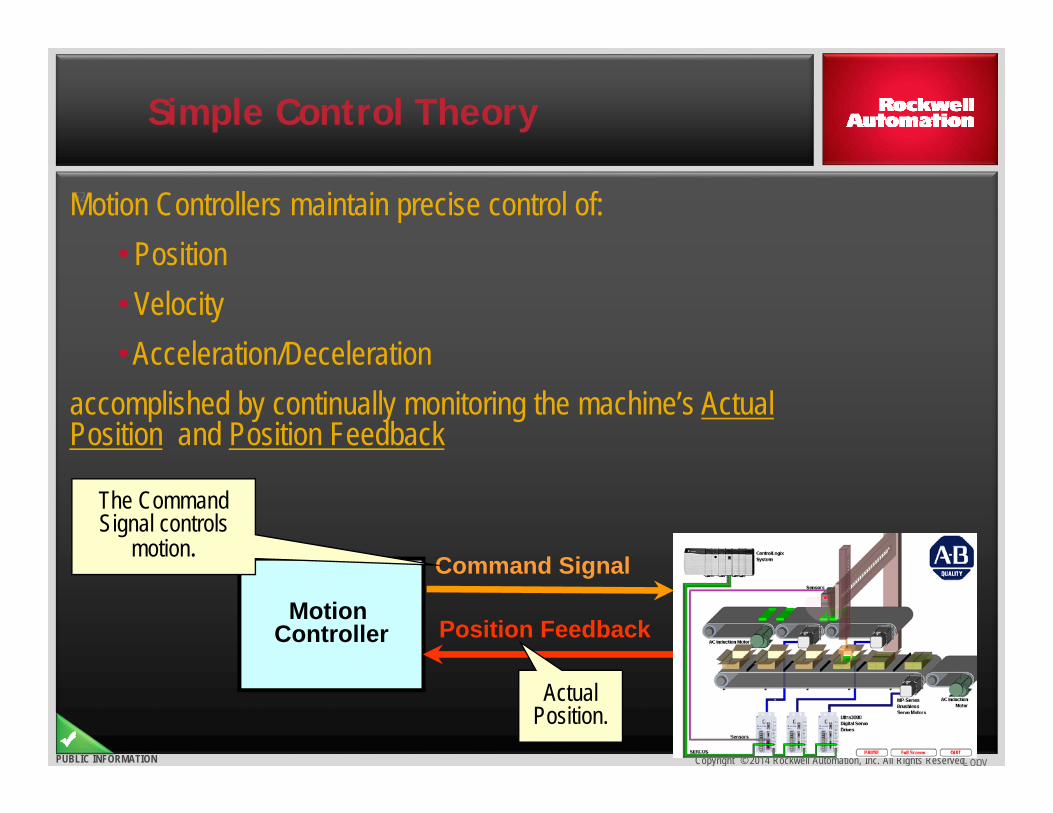
62Motion Controllers maintain precise control of:• Position• Velocity• Acceleration/Deceleration
accomplished by continually monitoring the machine’s Actual Position and Position Feedback
Motion Controller
Command Signal
Position Feedback
The Command Signal controls
motion.
Actual Position.
Simple Control Theory
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
63
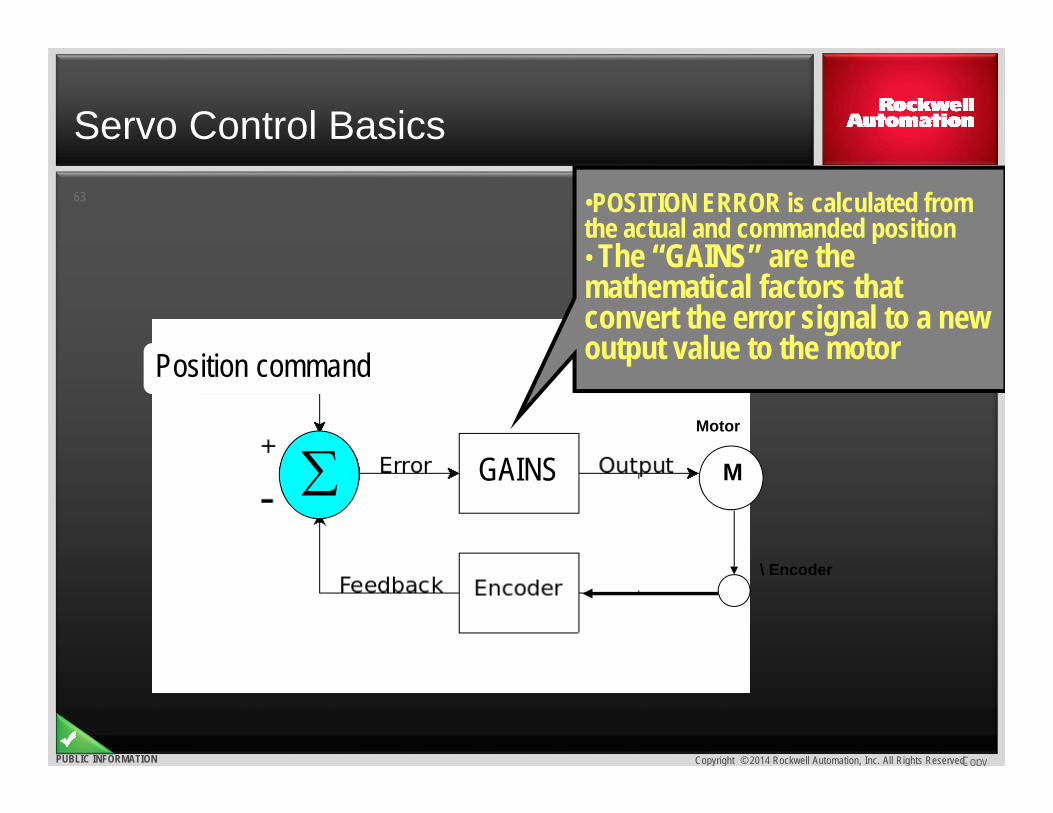
Servo Control Basics
•POSITION ERROR is calculated from the actual and commanded position• The “GAINS” are the mathematical factors that convert the error signal to a new output value to the motorPosition command
GAINS M
Motor
\ Encoder
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATIONCopyright © 2013 Rockwell Automation, Inc. All rights reserved. 64
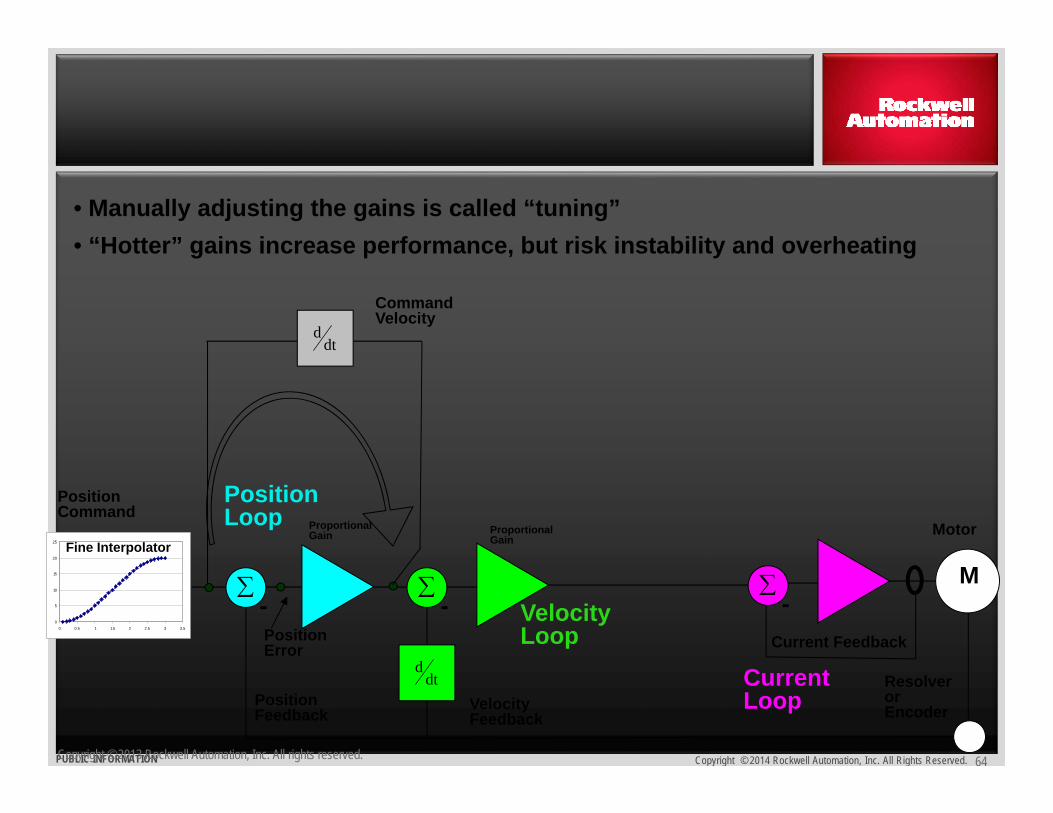
• Manually adjusting the gains is called “tuning”• “Hotter” gains increase performance, but risk instability and overheating
M0
5
10
15
20
25
0 0.5 1 1.5 2 2.5 3 3.5
Fine Interpolator
-
-
dtd
-
Resolver or Encoder
Position Feedback
Velocity Feedback
Position Error Current Feedback
MotorProportional Gain Proportional
Gain
Command Velocity
Position Command
Current Loop
Position Loop
dtd
Velocity Loop
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
65
INCOMPATIBILIDADE DE INÉRCIA
O que é inércia? INÉRCIA = é a resistência de um objeto à alteração de
seu movimento Inércia está NORMALMENTE relacionada ao PESO
Um objeto mais pesado irá resistir a alteração emseu movimento mais do que um objeto leve.
• Ele poderiaarremessaruma bola de boliche a maisde 90Km/h?
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
66
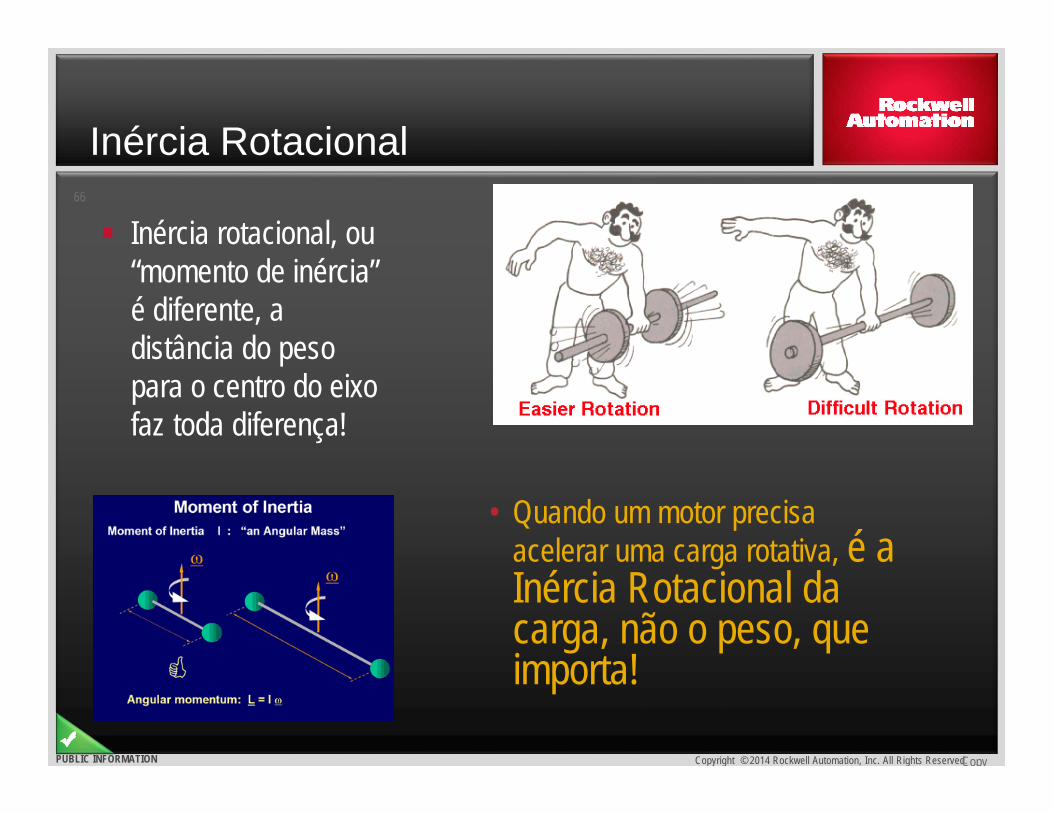
Inércia rotacional, ou“momento de inércia” é diferente, a distância do peso para o centro do eixofaz toda diferença!
• Quando um motor precisaacelerar uma carga rotativa, é a Inércia Rotacional da carga, não o peso, queimporta!
Inércia Rotacional

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
67
Inércia Rotacional
É verdade que reduzindo o peso de um componente reduz a inercia porém..
Quanto mais próximo a borda o peso for removido, menor será a inércia rotacional,
Permitindo ao motor ACELERAR a carga maisrápido
O que mais poderia ser feito para reduzir inércia?

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
68
Gearboxes (redutores)
Auenta a velocidade do motor Diminui o torque Diminui a inércia da carga, vista pelo
motor(pelo QUADRADO da relação)
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
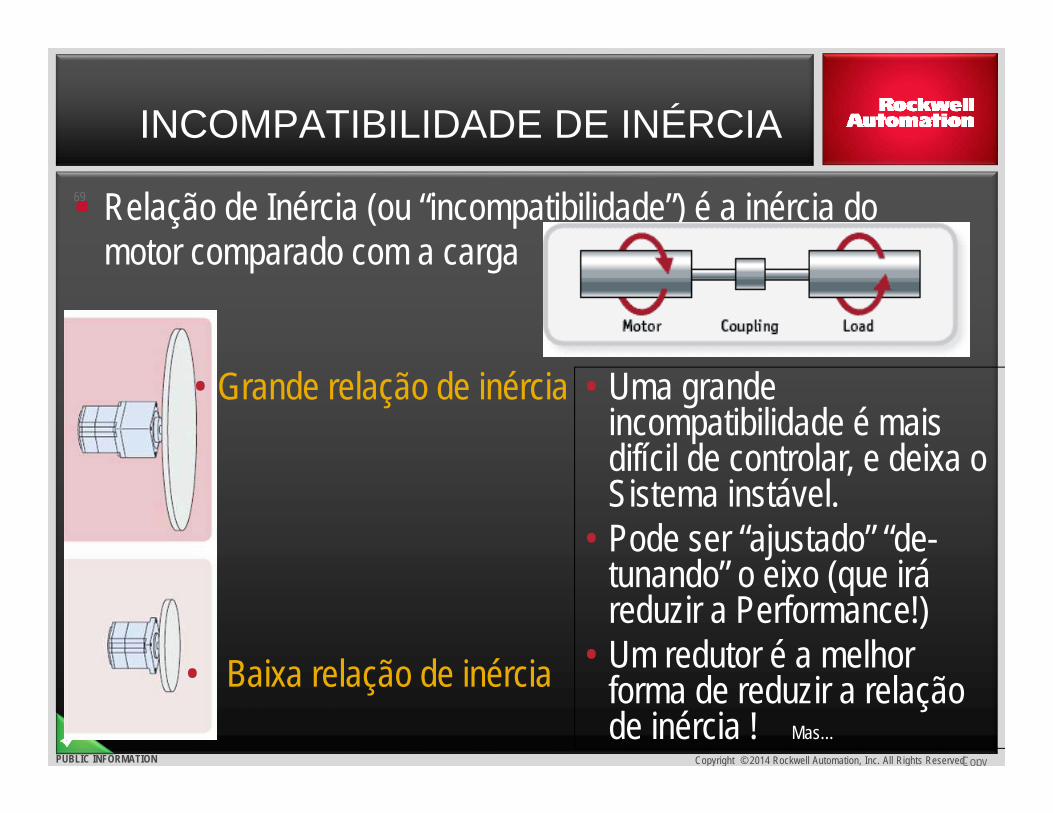
69 Relação de Inércia (ou “incompatibilidade”) é a inércia do motor comparado com a carga
• Baixa relação de inércia
• Grande relação de inércia • Uma grandeincompatibilidade é maisdifícil de controlar, e deixa o Sistema instável.
• Pode ser “ajustado” “de-tunando” o eixo (que iráreduzir a Performance!)
• Um redutor é a melhorforma de reduzir a relaçãode inércia ! Mas…
INCOMPATIBILIDADE DE INÉRCIA
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
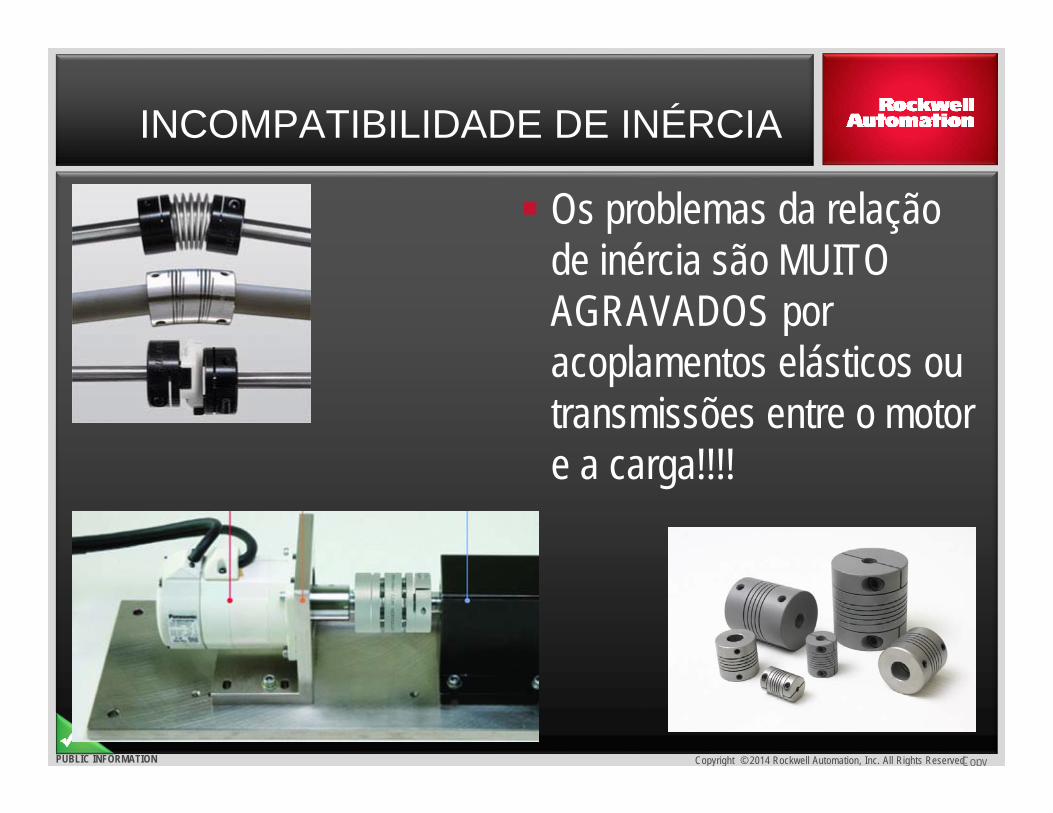
70 Os problemas da relaçãode inércia são MUITO AGRAVADOS poracoplamentos elásticos outransmissões entre o motor e a carga!!!!
INCOMPATIBILIDADE DE INÉRCIA
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION Copy
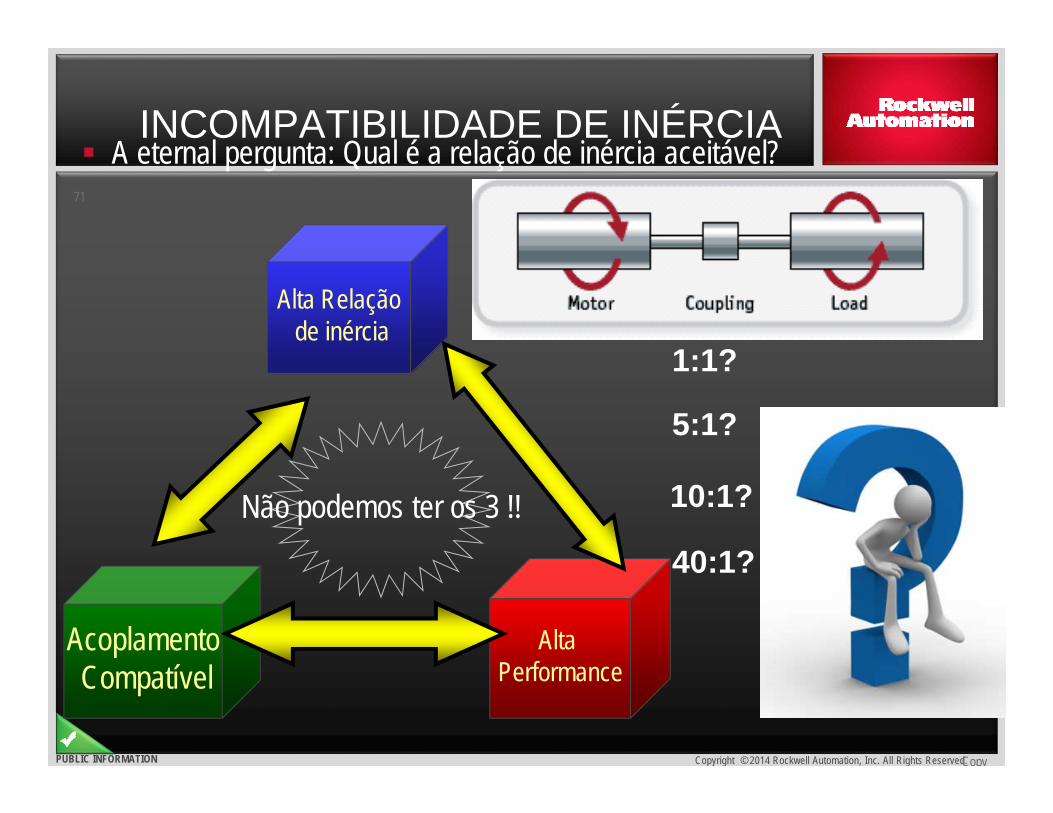
71
A eternal pergunta: Qual é a relação de inércia aceitável?
1:1?
5:1?
10:1?
40:1?
Alta Relaçãode inércia
AcoplamentoCompatível
Alta Performance
Não podemos ter os 3 !!
INCOMPATIBILIDADE DE INÉRCIA
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
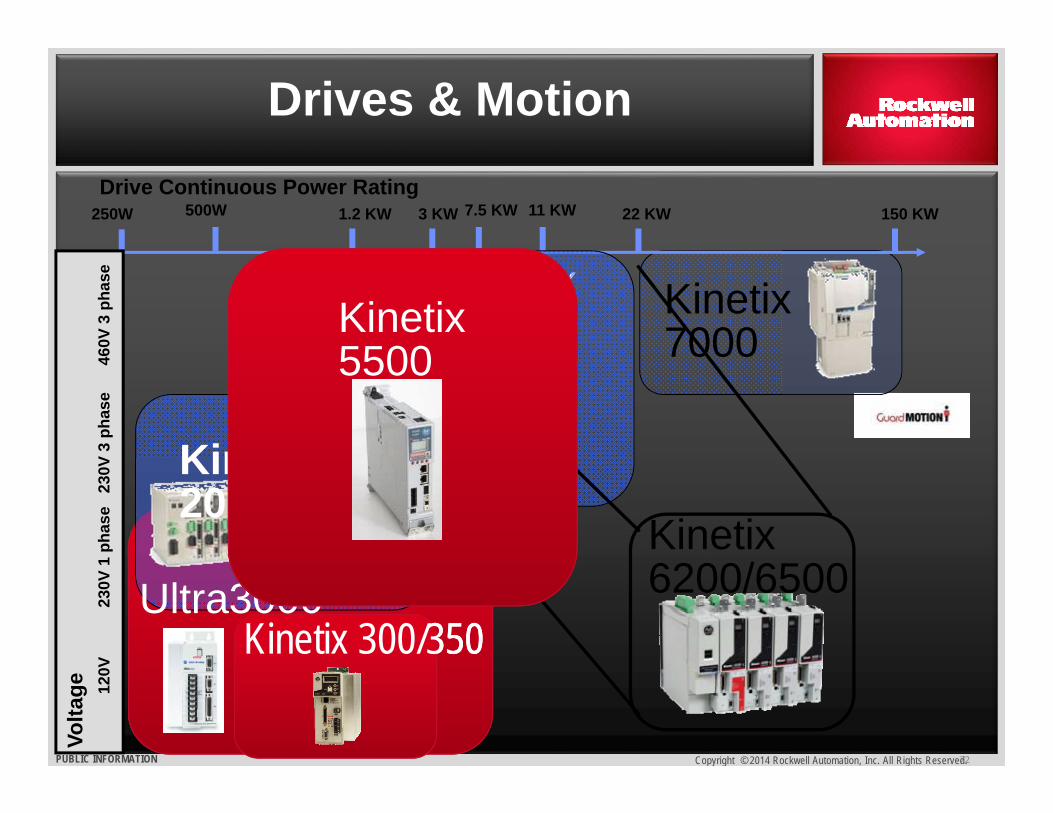
Drives & Motion
72
250W 3 KW 22 KW 150 KW1.2 KWDrive Continuous Power Rating
Kinetix6000 Kinetix
7000
Volta
ge 120V
2
30V
1 ph
ase
230
V 3
phas
e
460
V 3
phas
e
11 KW7.5 KW500W
Kinetix 300/350Kinetix 300/350
Kinetix6200/6500Ultra3000
Kinetix2000
Kinetix5500
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Drives & Motion
Motores Rotativos
Motores Direct drive
Motores Lineares
Cilindros Elétricos
Motores e Atuadores

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Drives & Motion
Recursos
- Faixa de tensão de entrada de 170 a 264 Vca, monofásica e trifásica- Saída de potência contínua de 0,05 W a 1,5 kW- Configurações de ganho e reconhecimento do motor automáticas- Solução de controle de posicionamento de custo otimizado para
aplicações menores, com poucos eixos- Comunicação serial Modbus-RTU para alterar parâmetros do inversor
durante a operação- Integra-se com os elementos fundamentais de componentes
conectados para realizar operações de indexação para até três eixos- Interfaces de comando flexíveis incluindo E/S digital, analógica, trem de
pulso e Modbus-RTU- Configurável com software UltraWare
KINETIX 3 Modbus RTUPTO - Analogico
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
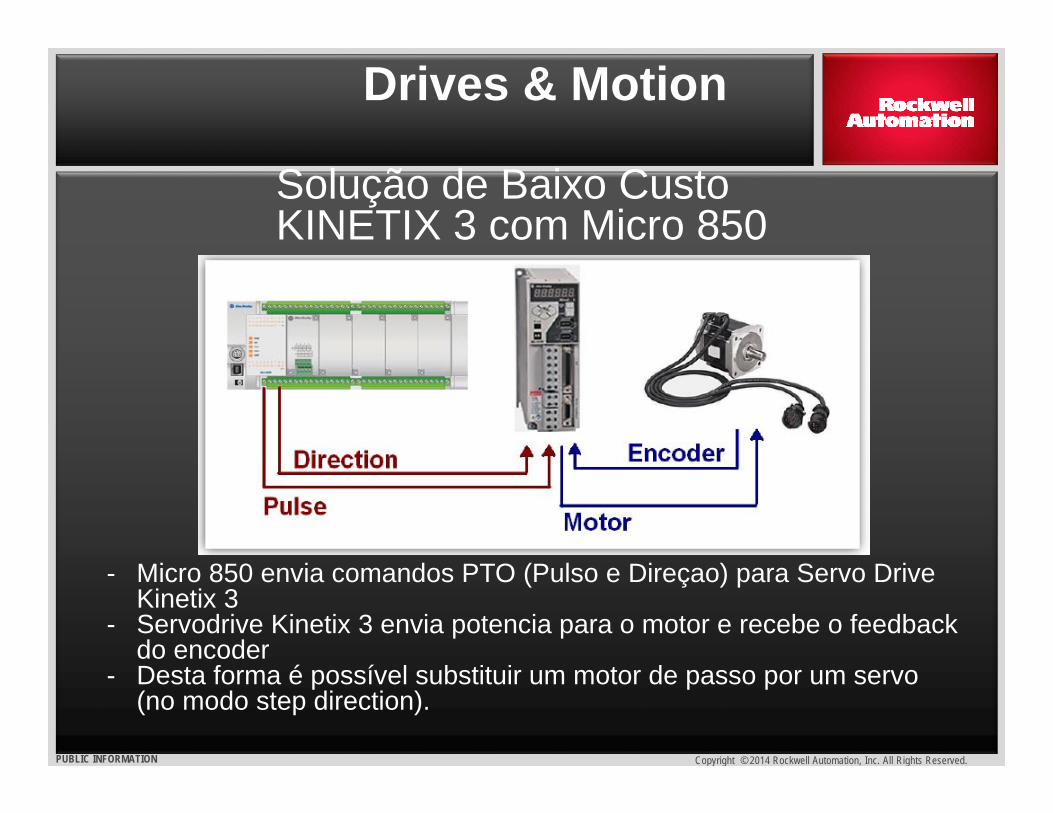
Drives & Motion
- Micro 850 envia comandos PTO (Pulso e Direçao) para Servo Drive Kinetix 3
- Servodrive Kinetix 3 envia potencia para o motor e recebe o feedback do encoder
- Desta forma é possível substituir um motor de passo por um servo (no modo step direction).
Solução de Baixo CustoKINETIX 3 com Micro 850
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Drives & Motion
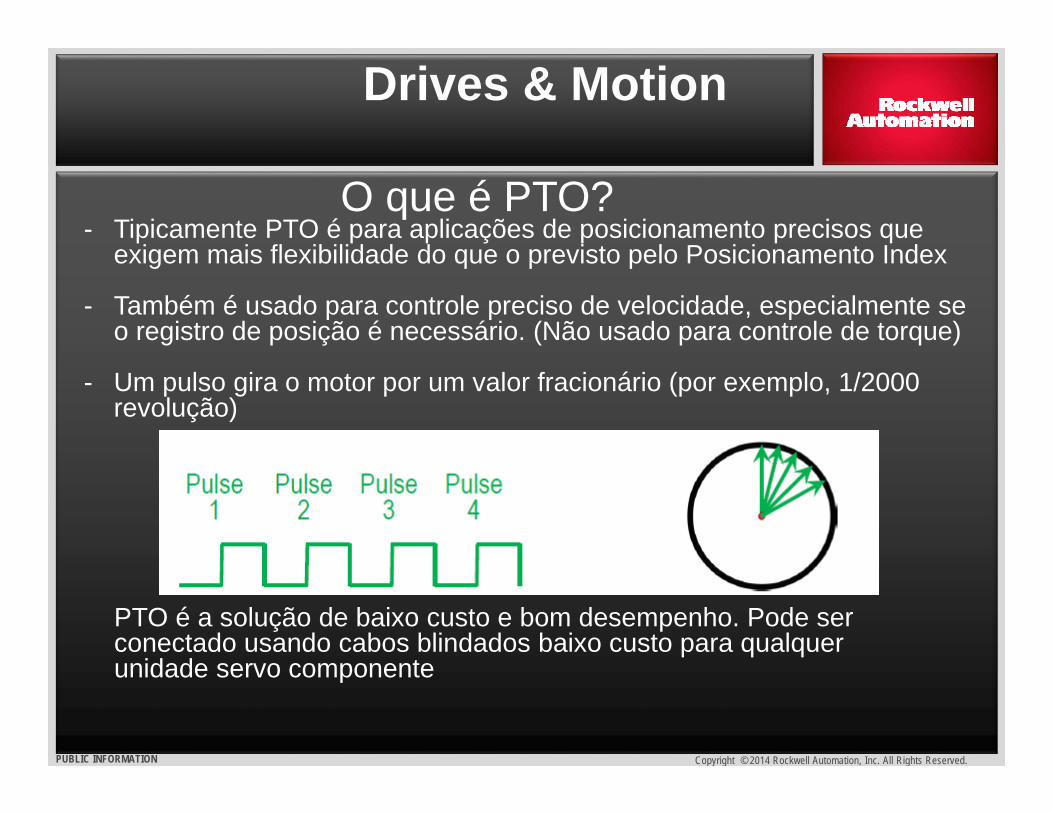
- Tipicamente PTO é para aplicações de posicionamento precisos que exigem mais flexibilidade do que o previsto pelo Posicionamento Index
- Também é usado para controle preciso de velocidade, especialmente se o registro de posição é necessário. (Não usado para controle de torque)
- Um pulso gira o motor por um valor fracionário (por exemplo, 1/2000 revolução)
O que é PTO?
PTO é a solução de baixo custo e bom desempenho. Pode ser conectado usando cabos blindados baixo custo para qualquer unidade servo componente
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Drives & Motion
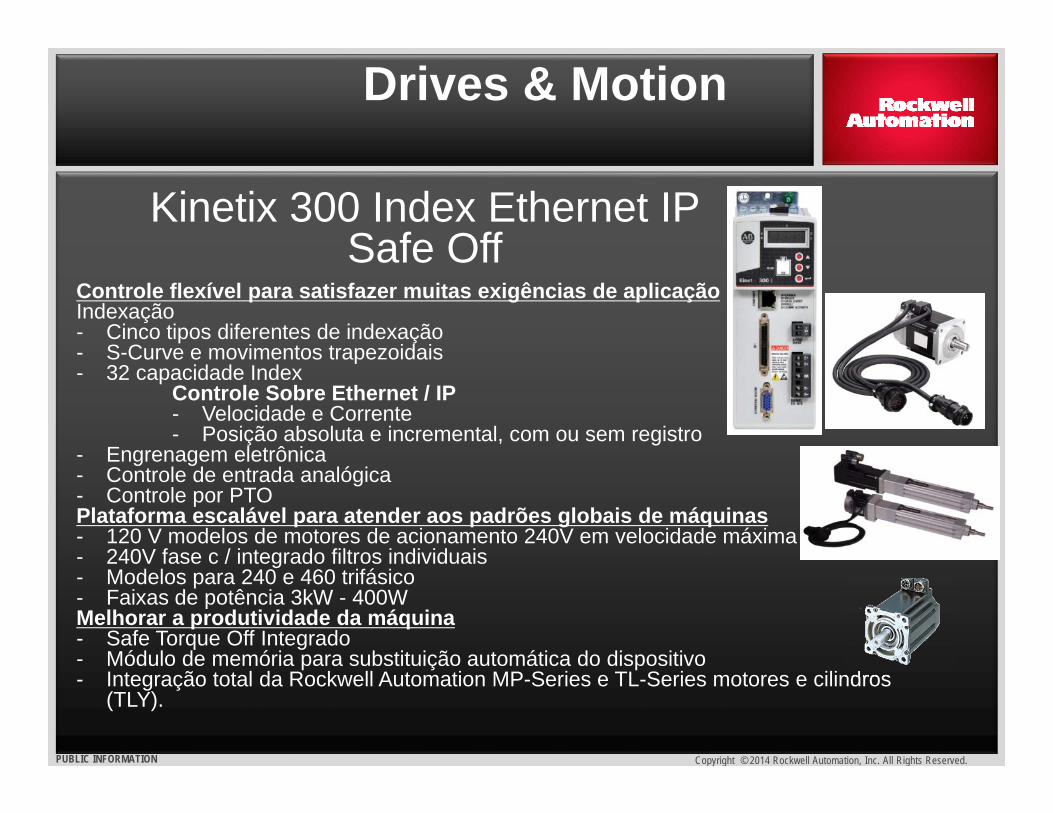
Controle flexível para satisfazer muitas exigências de aplicaçãoIndexação- Cinco tipos diferentes de indexação- S-Curve e movimentos trapezoidais- 32 capacidade Index
Controle Sobre Ethernet / IP- Velocidade e Corrente- Posição absoluta e incremental, com ou sem registro
- Engrenagem eletrônica- Controle de entrada analógica- Controle por PTOPlataforma escalável para atender aos padrões globais de máquinas- 120 V modelos de motores de acionamento 240V em velocidade máxima- 240V fase c / integrado filtros individuais- Modelos para 240 e 460 trifásico- Faixas de potência 3kW - 400WMelhorar a produtividade da máquina- Safe Torque Off Integrado- Módulo de memória para substituição automática do dispositivo- Integração total da Rockwell Automation MP-Series e TL-Series motores e cilindros
(TLY).
Kinetix 300 Index Ethernet IP Safe Off
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Drives & Motion
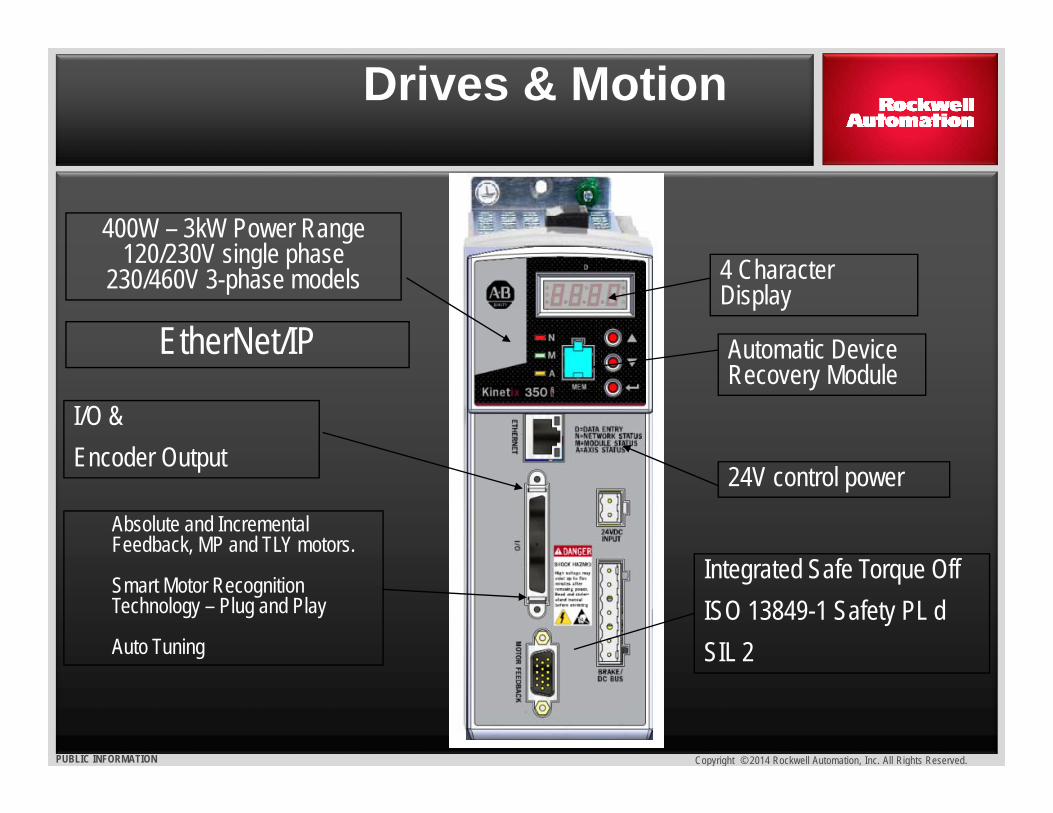
EtherNet/IP
Absolute and Incremental Feedback, MP and TLY motors.
Smart Motor Recognition Technology – Plug and Play
Auto Tuning
Integrated Safe Torque OffISO 13849-1 Safety PL dSIL 2
4 Character Display
400W – 3kW Power Range120/230V single phase
230/460V 3-phase models
24V control power
I/O &Encoder Output
Automatic Device Recovery Module

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Drives & Motion
Potência de saída contínua de 400 W a 3 kW
Tensão de entrada: 120-240 Vca monofásica e 240-460 Vca trifásica
Com suporte no software de programação RSLogix™ 5000 (somente na versão 20) e no ambiente de engenharia de automação e projeto do Studio 5000™ (versão 21 e posterior)
Ideal para controladores CompactLogix® e ControlLogix® em redes EtherNet/IP™
Integra-se facilmente com servo-motores e atuadores MP-Series™ e TL-Series™
Suporte a CIP MOTION, integração com CPU´s Motion
Kinetix 350 Ethernet IP CIP Motion Safe Off
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Drives & Motion
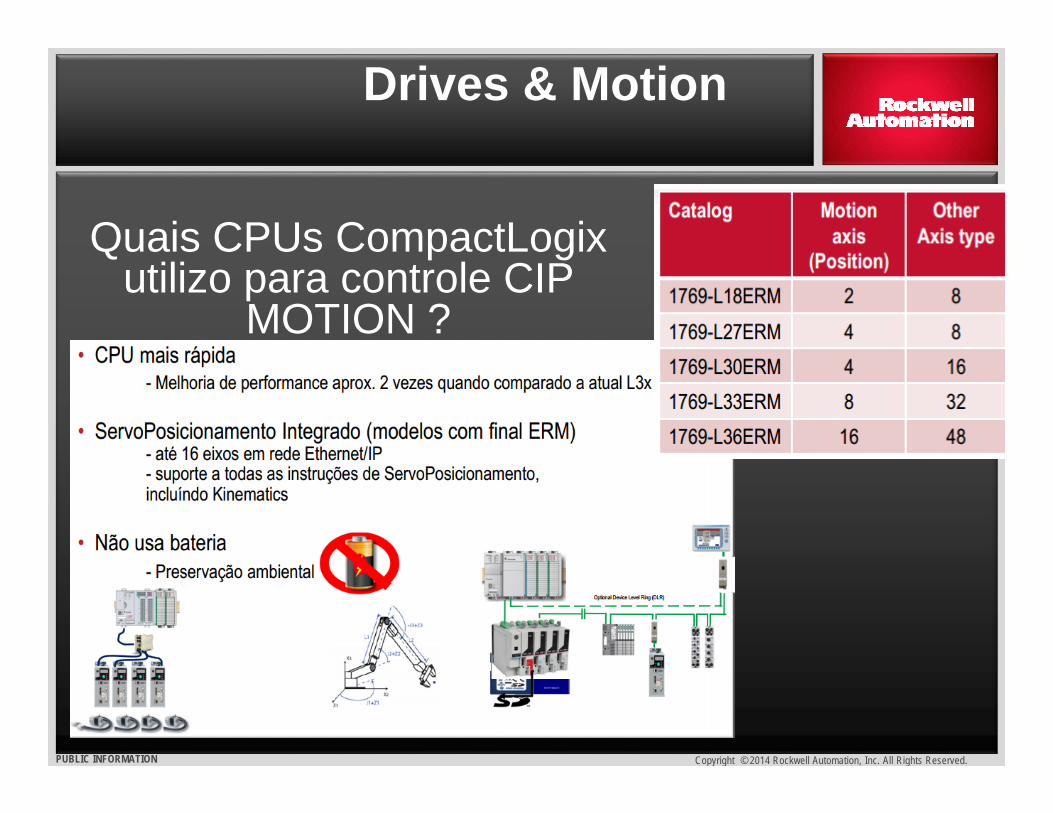
Quais CPUs CompactLogixutilizo para controle CIP
MOTION ?

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Drives & Motion
Kinetix 5500 Ethernet IP CIP Motion Safe Off
Recursos
Inclui Ethernet de porta dupla – Suporta DLR
Fornece realimentação digital através de um único cabo
Permite operar servo-motores e motores de indução em uma plataforma de inversor
Recursos de segurança incorporados:
O Safe Torque-Off tem certificação ISO 13849-1 PLd/SIL2.
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Drives & Motion
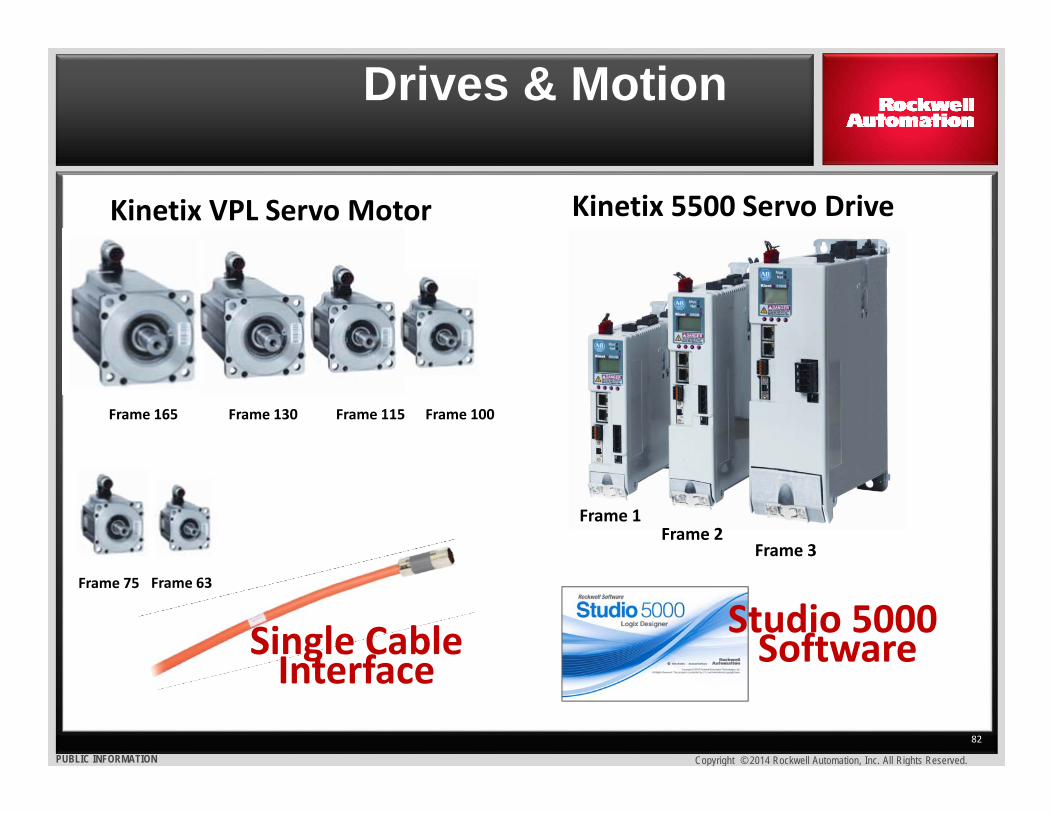
82
Single CableInterface
Studio 5000 Software
Kinetix 5500 Servo DriveKinetix VPL Servo Motor
Frame 3Frame 2
Frame 1
Frame 75 Frame 63
Frame 165 Frame 130 Frame 115 Frame 100

Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.PUBLIC INFORMATION
Drives & Motion
Kinetix 5500 / VPL
Kinetix 350 / TLY
Performance and Features
Price
Kinetix 6500 / MPL
•Lowest cost solution supports TLY motor
•500 usec loop closure performance
•600 W to 3 kW•Top performance 125 usec loop closure
•Smallest cabinet space required•600 W to 15 kW
•Single cable and hybrid power topology•VPL motor support at release
• Premier integrated solution• Top performance 125 usec loop
closure• 1.2 kW to 22 kW
• Supports entire motor portfolio• Advanced safety features

www.rockwellautomation.com
Follow ROKAutomation on Facebook & Twitter.Connect with us on LinkedIn.
Copyright © 2014 Rockwell Automation, Inc. All Rights Reserved.Rev 5058-CO900F
PUBLIC INFORMATION
Muito Obrigado!