Embed Size (px)
Citation preview

UNIVERSIDADE DE SÃO PAULO
Escola de Engenharia de São Carlos
RICARDO LOPES MOURA
O USO DE MICROCONTROLADORES
NO ACIONAMENTO E CONTROLE DE
MOTORES Brushless DC
Trabalho de Conclusão de Curso apresentado à Escola de Engenharia de São Carlos, da
Universidade de São Paulo
Curso de Engenharia Elétrica com ênfase em Sistemas de Energia e Automação
ORIENTADOR: Prof. Dr. Evandro Luís Linhari Rodrigues
São Carlos
2010


3
Resumo
Este trabalho apresenta um estudo do acionamento de motores BLDC (Brushless DC). Esses
motores são utilizados em aplicações diversas devido às vantagens que possuem sobre os motores de
corrente contínua convencionais e os motores de indução monofásicos. No entanto, por não possuir
escovas comutadoras, são eletronicamente comutados. Este trabalho foca no seu acionamento
utilizando sensores de efeito Hall para realimentação da posição do rotor e o controle de velocidade é
realizado via estratégia de modulação de largura de pulso (PWM). Para tanto, são utilizados
microcontroladores PIC ou dsPIC, que possuem módulos dedicados ao controle de motores. O uso do
microcontrolador se estende às interfaces de operação, e os circuitos eletrônicos adjacentes também
são estudados.
Palavras chaves: Brushless DC, comutação eletrônica, controle PWM, sensores de efeito
Hall, dsPIC30F, ponte trifásica.

4
Abstract
This paper focuses on Brushless DC (BLDC) motor driving. These motors have many
applications due to the advantages over the conventional DC and induction ones. However, because
they don’t use commutation brushes, they are interchanged electronically. This paper discusses the
motor driving employing Hall effect sensors as rotor position feedback, and a pulse width modulation
(PWM) strategy for speed control. In order to do so, PIC or dsPIC microcontrollers that have
dedicated modules to motors control are used. The use of microcontroller spreads to the operational
interfaces, and the adjacent electronics circuits are also studied.
Keywords: Brushless DC, electronic commutation, PWM control, Hall effect sensors,
dsPIC30F, triphase bridge.
5
Lista de Siglas e Abreviaturas
ADC Analog to Digital Converter
BLDC Brushless Direct Current
CC Corrente Contínua
CI Circuito Integrado
CMOS Complementary Metal-Oxide-Semiconductor
CN Change Notification
DC Direct Current
DIP Dual In-line Package
EC Electronic Commutated
EEPROM Electrically-Erasable Programmable Read-Only Memory
GND Ground
I2C Inter-Integrated Circuit
IGBT Insulated Gate Bipolar Transistor
LCD Liquid Crystal Display
LED Light-Emitting Diode
MOSFET Metal Oxide Semiconductor Field Effect Transistor
PWM Pulse Width Modulated
RAM Random Access Memory
SPI Serial Peripheral Interface
TTL Transistor-Transistor Logic
USB Universal Serial Bus

6

7
Lista de Figuras
Figura 1 - Diagrama simplificado de um Motor BLDC. ....................................................................... 15
Figura 2 - Características Torque x Velocidade. ................................................................................... 15
Figura 3 - Ponte Trifásica. ..................................................................................................................... 17
Figura 4 - Diagrama de sequência de chaveamento da ponte trifásica. ................................................. 18
Figura 5 - Sinais nas saídas PWM do microcontrolador ....................................................................... 20
Figura 6 - Sequência de sensores Hall e enrolamentos energizados ..................................................... 21
Figura 7 - Placa Protótipo...................................................................................................................... 23
Figura 8 - Digrama simplificado do projeto. ......................................................................................... 23
Figura 9 - Fluxograma Funcional - dsPIC30F2020............................................................................... 26
Figura 10 - Diagrama de blocos para obtenção da FT teórica. .............................................................. 27
Figura 11 - Resposta ao degrau unitário do modelo teórico. ................................................................. 28
Figura 12 - Sinais dos sensores Hall. .................................................................................................... 28
Figura 13 - Comparação das respostas do sistema real e dos modelos teóricos. ................................... 29
Figura 14 - Tensões de fase ................................................................................................................... 30
Figura 15 - Tensão de linha com duty cycle em 100% .......................................................................... 31
Figura 16 - Corrente de Partida ............................................................................................................. 31

8

9
Sumário
1. Introdução .................................................................................................................................... 11
2. Motor Brushless DC .................................................................................................................... 13
2.1 Estator .................................................................................................................................. 13
2.2 Rotor ..................................................................................................................................... 13
2.3 Sensores Hall ........................................................................................................................ 14
2.4 Princípios de operação ........................................................................................................ 14
2.5 Características Torque x Velocidade ................................................................................. 15
3. Acionamento ................................................................................................................................ 17
4. Projeto .......................................................................................................................................... 19
4.1 Motor .................................................................................................................................... 19
4.2 Comutação Eletrônica e Controle PWM ........................................................................... 19
4.2.1 Controle PWM ............................................................................................................. 20
4.2.2 Comutação Eletrônica ................................................................................................. 20
4.3 Interface de Operação ......................................................................................................... 22
4.4 Estrutura de Potência ......................................................................................................... 22
4.5 Placa Protótipo .................................................................................................................... 23
4.5.1 PIC18F4550.................................................................................................................. 24
4.5.2 dsPIC30F2020 .............................................................................................................. 24
4.5.3 Driver de Potência ....................................................................................................... 25
4.5.4 Alimentação ................................................................................................................. 25
4.5.5 Firmware ...................................................................................................................... 25
5. Ensaios .......................................................................................................................................... 27
5.1 Função de Transferência .................................................................................................... 27
5.2 Grandezas elétricas ............................................................................................................. 30
5.3 Dificuldades e Sugestões para trabalhos futuros .............................................................. 32
6. Conclusão ..................................................................................................................................... 34
Bibliografia ........................................................................................................................................... 36
Apêndice A – Placa Protótipo ............................................................................................................... 38

10

11
1. Introdução
Os motores do tipo Brushless (sem escovas) DC são utilizados em aplicações de diversas áreas
como eletrodomésticos, automotiva, aeroespacial, médica, equipamentos de automação industrial e
instrumentação. Motores BLDC (Brushless DC) têm muitas vantagens sobre os motores de corrente
contínua (CC) convencionais e motores de indução monofásicos, dentre as quais se pode destacar uma
razão maior entre torque e tamanho do motor, tornando-o muito útil em aplicações onde espaço e peso
são fatores críticos [1]. Além disso, apresentam outras vantagens, tais como:
- Melhores características de Torque x Velocidade
- Melhor resposta dinâmica
- Maior eficiência
- Menor ruído
- Grandes faixas (range) de velocidade
Como implícito no nome, os motores BLDC não possuem escovas para comutação, no entanto
são eletronicamente comutados. O circuito eletrônico necessário para realizar o acionamento deste tipo
de motor é complexo e caro, mas existem alguns microcontroladores de baixo e médio custo que
possuem módulos integrados que dão suporte e facilitam muito o projeto para o acionamento e
controle deste motor. Em diversas famílias de PICs e dsPICs (Microchip), podemos encontrar os
periféricos PCPWM (Power Control PWM), ou o PSPWM (Power Supply PWM), ou ainda o
MCPWM (Motor Control PWM), que funcionam de maneira muito semelhante. Cada um destes
periféricos pode ser encontrado, por exemplo, no microcontrolador PIC18F4431, no dsPIC30F2020, e
no dsPIC33FJ128MC506 respectivamente.
O Capítulo 2 deste trabalho apresenta os aspectos construtivos e os princípios de operação de
um motor BLDC. O Capítulo 3 apresenta o método de acionamento. O Capítulo 4 trata dos aspectos
concernentes ao projeto do controlador digital. O Capítulo 5 apresenta ensaios realizados com a placa
protótipo. E por fim o Capítulo 6 conclui este trabalho.

12

13
2. Motor Brushless DC
Os motores BLDC são um tipo de motor síncrono. Isto significa que o campo magnético
gerado no estator e o campo do rotor giram a uma mesma frequência, ou seja, não possuem o
escorregamento visto em motores de indução. Existem motores BLDC de uma, duas ou três fases,
sendo que o último é o mais comum e largamente usado. O tipo trifásico é também o foco deste
trabalho.
2.1 Estator
O estator do motor BLDC consiste de lâminas de aço sobrepostas, com bobinas colocadas em
ranhuras axialmente cortadas ao longo da periferia interna, lembrando o estator de um motor de
indução, no entanto os enrolamentos são distribuídos de maneira diferente. A maioria dos motores
BLDC possui três enrolamentos no estator, conectados em uma configuração tipo estrela. Cada um
destes enrolamentos é formado por várias bobinas interconectadas. Uma ou mais bobinas são alocadas
por ranhura, e são interconectadas para formar um enrolamento. Cada um dos enrolamentos é
distribuído na periferia do estator para formar um número par de pólos [1].
Existem dois tipos de configurações de enrolamento de estator, senoidal e trapezoidal. A
diferença consiste basicamente na interconexão entre as bobinas dos enrolamentos para haver
diferentes tipos de força contraeletromotriz (f.c.e.m), de acordo com o nome dado. Além disso,
juntamente com a f.c.e.m, a corrente de fase também possui a variante trapezoidal ou senoidal de
acordo com o respectivo tipo de motor [1].
2.2 Rotor
O rotor do motor Brushless DC é feito de imã permanente e pode ter de um a oito pares de
pólos, alternados Norte e Sul.
Baseado na intensidade de campo magnético necessária no rotor, para as condições de
operação requerida, o material magnético apropriado é escolhido. Imãs de ferrita são tradicionalmente
usados como imãs permanentes, mas com o avanço da tecnologia, imãs permanentes de ligas de terras
raras ganharam popularidade. Os imãs de ferrita são menos caros, mas os imãs de terras raras têm uma
maior densidade de fluxo magnético por volume, portanto permitem obter o mesmo torque com um
rotor de dimensões e peso menores [1].
Imãs de Samário-Cobalto (SmCo) e Neomídio-Ferro-Boro (NdFeB) são exemplos de imãs de
ligas de terras raras.

14
2.3 Sensores Hall
Diferentemente dos motores DC com escovas, a comutação de um motor BLDC é controlada
eletronicamente. Para acionar um motor BLDC, os enrolamentos do estator devem ser energizados de
acordo com a posição angular do rotor, seguindo uma sequência. A posição do rotor é detectada, de
modo mais comum, usando-se sensores de efeito Hall localizados no estator.
A maioria dos motores BLDC possui três sensores Hall. Quando um pólo magnético passa por
perto dos sensores Hall, eles fornecem um sinal digital alto ou baixo, indicando um norte ou sul
magnético passando por eles. Baseado na combinação dos sinais dos três sensores a comutação
conseqüente pode ser determinada [1].
2.4 Princípios de operação
Em cada comutação realizada, uma das três fases é conectada ao terminal positivo da fonte
(corrente entrando no enrolamento), outra ao terminal negativo (corrente saindo do enrolamento), e a
terceira fase encontrar-se-á em aberto ou em alta impedância (não circula corrente). Um torque é
produzido devido à interação entre o campo magnético gerado nas bobinas do estator e o rotor de imã
permanente. O torque é máximo quando os dois campos estão a 90° um do outro, e cai conforme os
campos se alinham, até tornar-se nulo. Portanto, para o motor continuar em movimento, o campo
magnético produzido no estator deve mudar de posição. Os sensores de efeito Hall realimentam o
sistema de comutação eletrônica, que realiza a energização da bobinas na sequência correta para o
funcionamento contínuo do motor [1].
A cada 60° elétricos de rotação, um dos sensores Hall muda de estado. Logo são necessários
seis passos para completar um ciclo elétrico. Em sincronia, a cada 60° elétricos a sequência de
energização das fases deve ser atualizada. No entanto, um ciclo elétrico pode não corresponder a um
ciclo mecânico (rotação completa do rotor). O número de ciclos elétricos necessários para se
completar uma rotação mecânica completa é determinado pelo número de pares de pólos do rotor. Para
cada par de pólos, um ciclo elétrico é realizado, portanto o número de ciclos por rotação é igual ao
número de pares de pólos [1].
É possível determinar o instante de comutação entre as fases do motor monitorando a f.c.e.m
da fase que se encontra desconectada do barramento de alimentação a cada passo do ciclo. Esta
estratégia de controle é denominada sensorless, pois não utiliza sensores Hall, embora seja necessário
“sensorear” a f.e.m no ramo não alimentado. O controle sensorless possui obviamente uma vantagem
de custo devido à eliminação dos sensores Hall de posição, porém possui várias desvantagens que
inviabilizam seu uso em muitas aplicações [2].

Figura 1 - Diagrama simplificado de um Motor BLDC
A Figura 1 apresenta o diagrama de um motor BLDC de um par de pólos. A cada passo o rotor
se desloca 60°. Os enrolamentos
alinhamento com o correspondente campo magnético do estator, e são desativados quando o rotor está
a 60° do alinhamento ao mesmo tempo em que
[2].
2.5 Características Torque x Velocidade
A Figura 2 exemplifica graficamente as características torque/velocidade.
parâmetros relacionados ao torque usados para
nominal. Durante o estado de regime permanente, o motor pode ser carregado
nominal, e ele permanecerá constante em uma faixa de velocidade até a velocidade nominal. O motor
pode operar em velocidades acima da nominal, até aproximadame
uma queda no torque [1].
Figura 2 - Características Torque x Velocidade
Diagrama simplificado de um Motor BLDC. Fonte: BROWN, W.
A Figura 1 apresenta o diagrama de um motor BLDC de um par de pólos. A cada passo o rotor
enrolamentos apropriados do estator são energizados quando o rotor está a 120° do
alinhamento com o correspondente campo magnético do estator, e são desativados quando o rotor está
ao mesmo tempo em que o próximo circuito é ativado, e
Características Torque x Velocidade
A Figura 2 exemplifica graficamente as características torque/velocidade.
parâmetros relacionados ao torque usados para definir um motor BLDC, torque de partida e torque
nominal. Durante o estado de regime permanente, o motor pode ser carregado
, e ele permanecerá constante em uma faixa de velocidade até a velocidade nominal. O motor
pode operar em velocidades acima da nominal, até aproximadamente 150% do seu valor, mas haverá
Características Torque x Velocidade. Figura retrabalhada: YEDAMALE, P. [1]
15
BROWN, W. [2]
A Figura 1 apresenta o diagrama de um motor BLDC de um par de pólos. A cada passo o rotor
são energizados quando o rotor está a 120° do
alinhamento com o correspondente campo magnético do estator, e são desativados quando o rotor está
ativado, e o processo se repete
A Figura 2 exemplifica graficamente as características torque/velocidade. Existem dois
, torque de partida e torque
nominal. Durante o estado de regime permanente, o motor pode ser carregado até o valor de torque
, e ele permanecerá constante em uma faixa de velocidade até a velocidade nominal. O motor
nte 150% do seu valor, mas haverá
Figura retrabalhada:

16
Aplicações que exigem frequentes partidas e paradas, ou reversão da rotação com carga no
motor, demandam mais torque do que o torque nominal. Isto ocorre por um breve período,
especialmente quando se parte do repouso e durante a aceleração. Durante este período, um torque
extra é necessário para vencer a inércia da carga e do próprio rotor. O motor pode suprir este torque
maior até um valor máximo, denominado torque de partida ou torque máximo, como mostrado na
curva da Figura 2 [1].

17
3. Acionamento
Para se realizar o acionamento do motor, cada fase é ligada a um braço de uma ponte trifásica
formada por seis chaves controladas, como mostrado na Figura 3. Baseado na tensão de alimentação e
nível de corrente necessários, estas chaves são escolhidas, podendo ser MOSFETs, IGBTs ou simples
transistores bipolares. Controlando-se as chaves, pode-se ligar uma fase do motor ao terminal positivo,
negativo, ou deixá-la desconectada [1].
Figura 3 - Ponte Trifásica. Fonte: BROWN, W. [2]
Como o motor possui uma característica indutiva, faz-se necessário a adição de seis diodos na
estrutura básica do inversor trifásico apresentado na Figura 3. Os diodos são colocados em antiparalelo
com cada chave comandada, gerando um interruptor bidirecional em corrente, que permite a
circulação de corrente durante a abertura das chaves. Esses diodos desempenham o papel de roda-livre
para a circulação da corrente na carga [3].
O modo de operação desta estrutura será do tipo 120º. Há seis sequências de operação em um
período da forma de onda da tensão alternada de saída. Em cada passo da sequência, duas chaves
controladas permanecem em condução, conectando dois dos terminais da carga aos terminais da fonte
de alimentação CC, enquanto o terceiro permanece flutuando. Por conseguinte, em qualquer instante
de tempo uma chave controlada do grupo positivo (Ahigh, Bhigh, Chigh) e uma do grupo negativo (Alow,
Blow, Clow) estão conduzindo. A cada intervalo de 60° uma chave controlada é colocada em condução,
obedecendo a uma sequência apropriada a fim de gerar um sistema de tensões trifásicas balanceadas
defasadas de 120°. Verifica-se pelo diagrama de sequência de chaveamento da Figura 4 que a
possibilidade de curto-circuito neste modo de operação é muito remota, dado o fato que há um
intervalo relativamente grande de um sexto do período, ou seja, 60° entre a ordem de bloqueio de uma
chave e a ordem de entrada em condução de outra chave, ambas pertencentes ao mesmo braço inversor
[3].

18
Figura 4 - Diagrama de sequência de chaveamento da ponte trifásica. Figura retrabalhada: MARTINS, D. C. [3]
O controle das chaves semicondutoras pode ser feito por um microcontrolador, que faz a
leitura dos sensores de posição do rotor e gera sinais para ligar ou desligar as chaves de acordo com a
sequência de comutação das fases. A velocidade do motor é proporcional à tensão DC, ou tensão
média de alimentação. Para variar a velocidade, usa-se pulsos com largura modulada (Pulse Width
Modulated), para acionar as chaves. Assim, a tensão média aplicada ao motor será proporcional a
tensão do barramento DC e ao duty cycle do PWM. Ou seja, o microcontrolador controla a tensão
média aplicada ao estator através da porcentagem do duty cycle do PWM, e consequentemente a
velocidade. Como regra geral, a frequência do PWM deve ser ao menos 10 vezes maior do que a
maior frequência de rotação do motor [1].
Dependendo do tipo de transistor utilizado na ponte, o sinal do microcontrolador não é
suficiente para acionar a chave diretamente. Neste caso existem várias estratégias para contornar este
problema. Existem vários circuitos integrados desenvolvidos para esta tarefa, no entanto, para esta
configuração de inversor trifásico especificamente, é interessante utilizar-se o circuito integrado
IR2130 ou semelhante. Este CI aceita sinais de entrada com níveis TTL e CMOS e fornece sinais de
saída com os níveis necessários para ligá-lo às seis chaves da ponte trifásica. Além disso, possui
proteção de faltas, como sobrecorrente e curto circuito, uma saída de sinalização de falta, e também
um amplificador de corrente interno, que pode ser usado para gerar um nível de tensão proporcional à
corrente de armadura para ser lido pelo canal analógico do microcontrolador. O uso de um CI deste
tipo reduz significativamente o hardware necessário para realizar estas tarefas [4].

19
4. Projeto
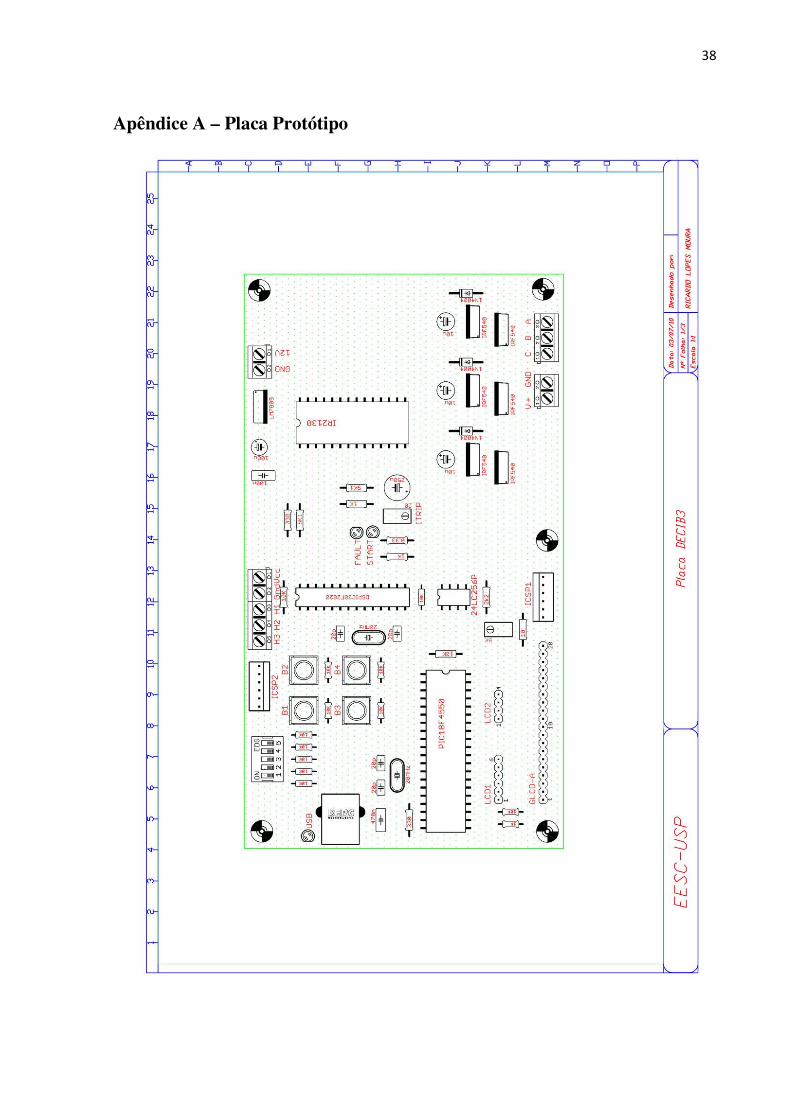
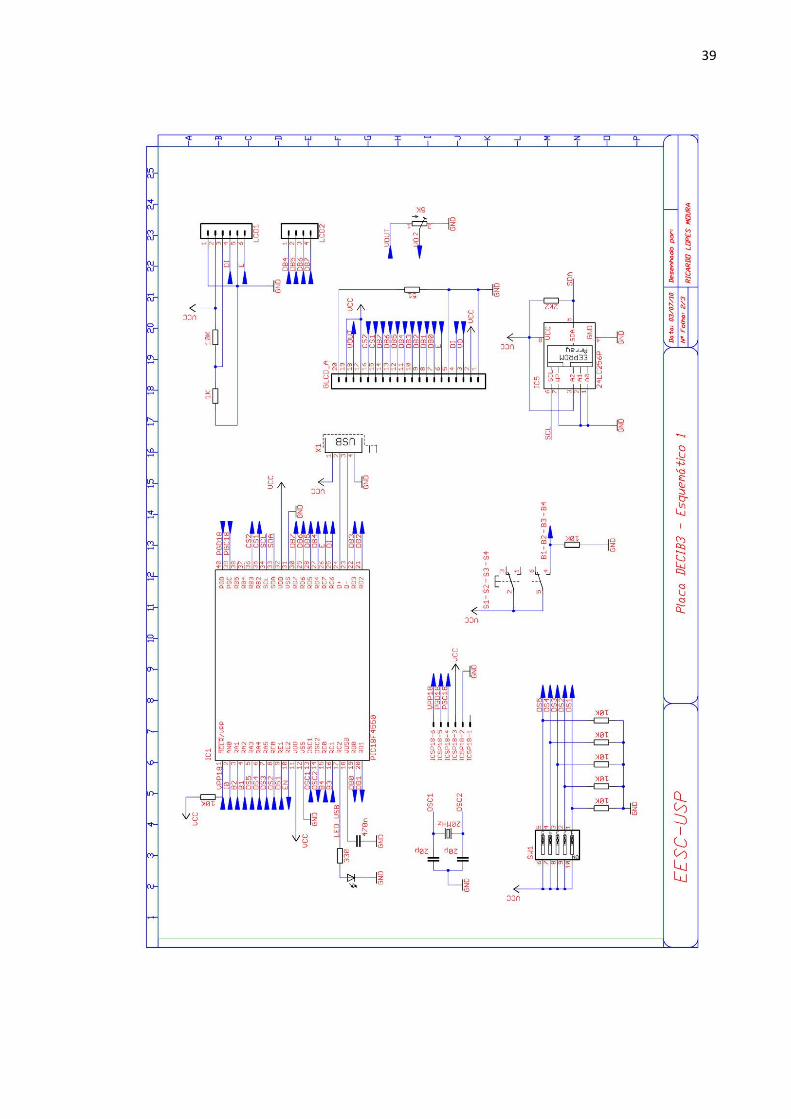
Os itens seguintes deste capítulo tratam dos principais componentes do projeto de um
controlador para um motor BLDC, que inicialmente foram escolhidos para a construção de uma placa
protótipo para a realização de estudos e ensaios. Os diagramas esquemáticos da placa são apresentados
no apêndice A.
4.1 Motor
O motor utilizado na realização deste projeto é o Maxon EC22 (266520). Trata-se de um
motor com um par de pólos e três fases conectadas em estrela. Alguns parâmetros elétricos e
mecânicos encontrados nas especificações técnicas do fabricante são descritos na Tabela 1 a seguir.
Tabela 1- Parâmetros do motor [5]
Parâmetros Valor Unidade
Tensão Nominal 32,0 V
Corrente Nominal 4,18 A
Resistência (F-F) 0,363 Ω
Indutância (F-F) 0,0490 mH
Torque nominal 28,6 mNm
Torque de partida 652 mNm
Velocidade nominal 41100 Rpm
Máxima eficiência 88 %
Constante de torque 7,39 mNm/A
Constante de Inércia 4,63 gcm2
4.2 Comutação Eletrônica e Controle PWM
No projeto da placa protótipo para estudo, foram utilizados dois microcontroladores
diferentes. Sendo um para realizar o controle PWM da tensão de alimentação do motor, e o segundo
para realizar a interface de operação.
Para realizar a comutação eletrônica e o controle PWM de tensão, foi utilizado o
microcontrolador dsPIC30F2020. Algumas de suas características principais concernentes ao projeto
são [6]:
• Encapsulamento SDIP - 28 pinos
• 12 KBytes de memória Flash de programa

20
• 512 Bytes de memória RAM
• Módulo Power Supply PWM
o 4 geradores PWM com 8 saídas
• SPI/I2C
• Conversor A/D de 10 bits, 8 entradas.
4.2.1 Controle PWM
Como citado na seção 3, para que seja possível variar a velocidade de rotação do motor é
preciso aplicar uma tensão variável aos terminais dos enrolamentos do motor. Em termos digitais, a
tensão variável pode ser obtida com diferentes duty cycles de um sinal PWM aplicado aos
enrolamentos do motor BLDC [7]. O dsPIC30F2020 possui oito saídas PWM independentes, ou
quatro pares no modo complementar. Obviamente, para esta aplicação, são usadas apenas seis destas
oito saídas. O sinal PWM será aplicado ao grupo positivo de chaves controladas da ponte trifásica,
enquanto o grupo negativo é conectado ao GND da fonte. A Figura 5 mostra as saídas PWM do
microcontrolador no decorrer das etapas do ciclo.
4.2.2 Comutação Eletrônica
Para detectar o momento em que se deve realizar cada passo da sequência de comutação das
chaves controladas, os sensores de efeito Hall são conectados às entradas do dsPIC30F2020 que
detectam uma mudança de estado (Change Notification (CN) inputs). Uma mudança de estado em um
desses pinos gera uma interrupção. Na rotina de interrupção CN o programa lê o valor de saída dos
Figura 5 - Sinais nas saídas PWM do microcontrolador

21
sensores Hall e gera os sinais de saída PWM a partir da sequência tabelada associada ao valor lido,
realizando assim a comutação dos enrolamentos do motor BLDC [7]. Além disso, cada entrada CN
possui um pull-up interno que pode ser habilitado por meio de um dos seus registradores de controle.
Isto elimina a necessidade de resistores externos para o funcionamento dos sensores Hall, que
possuem saídas do tipo coletor aberto.
O diagrama da Figura 6 apresenta os sinais dos sensores Hall e a energização das bobinas em
cada passo do ciclo para o acionamento do motor no sentido horário.
Figura 6 - Sequência de sensores Hall e enrolamentos energizados. Figura retrabalhada: MAXON [8].
As informações contidas na Figura 5 e Figura 6 são associadas na Tabela 2 a seguir,
construída para uma melhor compreensão da sequência de comutação a ser programada no
microcontrolador. Vale ressaltar que para mudar o sentido de rotação, basta inverter a polaridade da
alimentação das fases em cada etapa do ciclo apresentado na tabela.
22
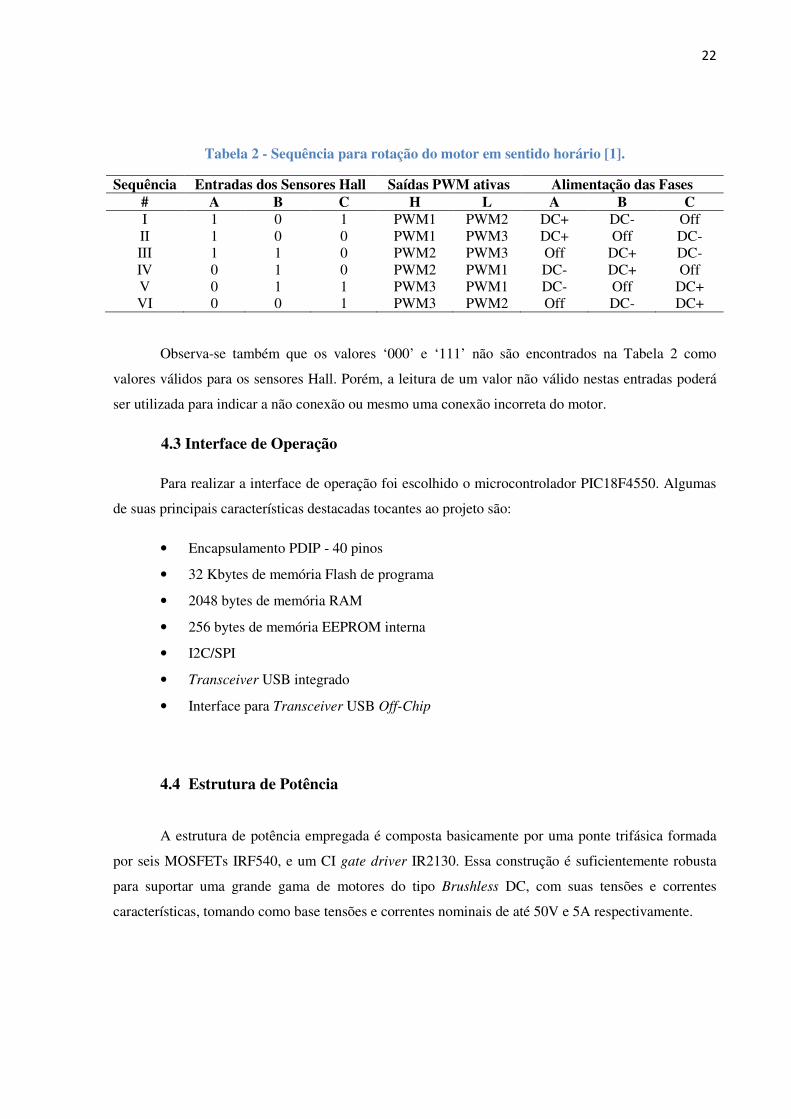
Tabela 2 - Sequência para rotação do motor em sentido horário [1].
Sequência Entradas dos Sensores Hall Saídas PWM ativas Alimentação das Fases # A B C H L A B C I 1 0 1 PWM1 PWM2 DC+ DC- Off II 1 0 0 PWM1 PWM3 DC+ Off DC- III 1 1 0 PWM2 PWM3 Off DC+ DC- IV 0 1 0 PWM2 PWM1 DC- DC+ Off V 0 1 1 PWM3 PWM1 DC- Off DC+ VI 0 0 1 PWM3 PWM2 Off DC- DC+
Observa-se também que os valores ‘000’ e ‘111’ não são encontrados na Tabela 2 como
valores válidos para os sensores Hall. Porém, a leitura de um valor não válido nestas entradas poderá
ser utilizada para indicar a não conexão ou mesmo uma conexão incorreta do motor.
4.3 Interface de Operação
Para realizar a interface de operação foi escolhido o microcontrolador PIC18F4550. Algumas
de suas principais características destacadas tocantes ao projeto são:
• Encapsulamento PDIP - 40 pinos
• 32 Kbytes de memória Flash de programa
• 2048 bytes de memória RAM
• 256 bytes de memória EEPROM interna
• I2C/SPI
• Transceiver USB integrado
• Interface para Transceiver USB Off-Chip
4.4 Estrutura de Potência
A estrutura de potência empregada é composta basicamente por uma ponte trifásica formada
por seis MOSFETs IRF540, e um CI gate driver IR2130. Essa construção é suficientemente robusta
para suportar uma grande gama de motores do tipo Brushless DC, com suas tensões e correntes
características, tomando como base tensões e correntes nominais de até 50V e 5A respectivamente.

4.5 Placa Protótipo
O projeto da placa protótipo foi especialmen
ensaios com o motor e os microcontroladores citados. Os diagramas esquemáticos e o layout
apresentados no Apêndice A, e
placa em estudo com seus principais componentes destac
A Figura 8 a seguir apresenta o diagrama simplificado com os blocos principais que compõe o
corpo do projeto.
Figura
Placa Protótipo
O projeto da placa protótipo foi especialmente desenvolvido para serem realizados
ensaios com o motor e os microcontroladores citados. Os diagramas esquemáticos e o layout
, e foram desenvolvidos no software Eagle 5.6.
placa em estudo com seus principais componentes destacados.
Figura 7 - Placa Protótipo
a seguir apresenta o diagrama simplificado com os blocos principais que compõe o
Figura 8 - Digrama simplificado do projeto.
23
te desenvolvido para serem realizados estudos e
ensaios com o motor e os microcontroladores citados. Os diagramas esquemáticos e o layout são
A Figura 7 apresenta a
a seguir apresenta o diagrama simplificado com os blocos principais que compõe o

24
4.5.1 PIC18F4550
O primeiro bloco do diagrama da Figura 8 representa o microcontrolador PIC18F4550. Este
realiza a leitura das teclas, exibe no display o modo de acionamento (direto, reverso ou parado) e a
velocidade selecionada, e se comunica com o segundo dsPIC30F2020 utilizando três pinos, dos quais
dois são multiplexados com o módulo I2C em ambos microcontroladores. Deste modo a comunicação
pode ser realizada tanto de forma codificada, usando os três pinos apenas como I/O digitais, como
utilizando o módulo I2C.
Em resumo, podemos destacar os seguintes itens visados no projeto junto ao PIC18F4550.
• Quatro push buttons para acionamento do motor no modo direto ou reverso e funções de
incremento e decremento do set point de velocidade.
• 1 DIP Switch de 5 vias, que possibilita a realização de eventuais configurações manuais.
• Conector USB.
• Conexão disponível para display LCD gráfico ou de caracteres.
• Pinos do módulo I2C ligados ao dsPIC e a uma EEPROM externa para comunicação de
dados.
• Sinal analógico de intensidade de corrente ligado a um canal do módulo ADC.
• LED de sinalização.
• Conector para gravação in-circuit.
4.5.2 dsPIC30F2020
Os itens visados no projeto da placa protótipo relacionados com o dsPIC30F2020 são listados
abaixo:
• Conector de entrada dos sinais dos sensores Hall no módulo Change Notification Input.
• 6 saídas PWM ligadas ao gate driver IR2130.
• Sinal analógico de intensidade de corrente ligado a um canal do módulo ADC.
• LED de sinalização.
• Pinos para comunicação I2C.
• Conector para gravação in-circuit.

25
4.5.3 Driver de Potência
O bloco de potência da placa protótipo foi projetado utilizando os seguintes itens:
• IR2130
o Circuito adjacente desenvolvido com base no documento AN985 (Application Note
985) da International Rectifier [4].
• 6 MOSFETs IRF540
4.5.4 Alimentação
Os itens previstos para a alimentação de energia da placa protótipo são listados a seguir:
• Conector de alimentação do motor
• Conector de alimentação do circuito digital
o Entrada 12V
Regulador de tensão 5V
• Conector para alimentação dos sensores Hall
o Saída 5V
4.5.5 Firmware
O fluxograma funcional do programa implementado no dsPIC30F2020 é apresentado na
Figura 9. A rotina descrita realiza o acionamento e o controle da velocidade em malha aberta e foi
desenvolvida em linguagem C utilizando o ambiente de desenvolvimento MPLAB® da Microchip™.

Figura
Figura 9 - Fluxograma Funcional - dsPIC30F2020
26

27
5. Ensaios
5.1 Função de Transferência
Para se obter a função de transferência do motor, primeiramente fez-se necessário a realização
de um modelo teórico. Utilizando os parâmetros do motor, encontrados na sua folha de dados, fez-se o
modelo monofásico baseado em um motor CC convencional, utilizando o software Simulink™. A
Figura 10 mostra o diagrama da planta em estudo.
Figura 10 - Diagrama de blocos para obtenção da FT teórica.
Os parâmetros utilizados no diagrama de blocos são descritos na tabela 3.
Tabela 3 - Valores dos parâmetros utilizados no modelo teórico.
Símbolo Valor Descrição
R 0,363 Resistência (Fase – Fase) [ohm]
L 0,049e-3 Indutância (Fase – Fase) [H]
Kt 7,39e-3 Constante de Torque [N.m/A]
J 4,63e-7 Inércia do Rotor [kg.m2]
Tmec 3,08e-3 Const. de tempo mecânica [s]
Kb J/Tmec Coef. de atrito viscoso [N.m.s]
Ke Kb Const. de f.c.e.m [V.s]
K 30/π Conversão [rad/s] para [rpm]
A função de transferência (Equação 1) que relaciona a tensão de alimentação e a velocidade do
motor em rpm foi obtida a partir do diagrama da Figura 10 e com o auxílio do Matlab™. A resposta ao
degrau desta função é mostrada na Figura 11.
1 3,111e09 7733 2,454e06 1

28
Figura 11 - Resposta ao degrau unitário do modelo teórico.
Com a finalidade de verificar a validade deste modelo, realizou-se um ensaio com o motor
conectado à placa protótipo já devidamente programada para realizar a comutação eletrônica, a fim de
se obter a mesma resposta dinâmica da planta em malha aberta. Utilizou-se um osciloscópio com três
canais disponíveis e com interface de transferência de dados para possibilitar a análise. Primeiramente,
foi aplicado um degrau de 6 volts ao sistema e cada canal foi utilizado para monitorar o sinal de saída
de um sensor Hall, os três sinais foram transferidos para o Matlab e são mostrados na Figura 12.
Figura 12 - Sinais dos sensores Hall.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
200
400
600
800
1000
1200
1400
t(s)
n(r
pm
)
Resposta ao Degrau
Modelo Teórico
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-5
0
5
10
t(s)
V(v
olts)
Sensor Hall 1
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-5
0
5
10
t(s)
V(v
olts)
Sensor Hall 2
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-5
0
5
10
t(s)
V(v
olts)
Sensor Hall 3

29
Baseado no intervalo de tempo entre cada mudança de estado dos sensores Hall, que
corresponde a um deslocamento angular de 60° do rotor, é possível calcular a velocidade média neste
intervalo de tempo.
3 ∆ rad/s ou
3 ∆ # 30
10∆ rpm 2
A Figura 13 apresenta o resultado destes cálculos sobrepostos à resposta ao degrau do modelo
teórico. Os resultados foram normalizados para uma resposta ao degrau unitário. A precisão das
medidas e os cálculos efetuados afetam significativamente o erro na observação da velocidade, como
se observa na Figura 13. Porém, fica evidente que o comportamento dinâmico do sistema medido é
compatível com o modelo teórico obtido anteriormente, a menos das perdas nos MOSFETs e outras
perdas suplementares. A resistência do MOSFET quando em condução, encontrada na sua folha de
dados é de 0,044Ω. Adicionando este valor à resistência considerada inicialmente no modelo, temos
agora & 0,363 0,044 = 0,407. A resposta do segundo modelo teórico, com esta perda
considerada, é também mostrada no gráfico da Figura 13, e é possível concluir que este modelo pode
representar o sistema real com bastante precisão.
Figura 13 - Comparação das respostas do sistema real e dos modelos teóricos.
A função de transferência do segundo modelo teórico é:
2 3,111e09 8631 2,746e06 3
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
200
400
600
800
1000
1200
1400
t(s)
n(r
pm
)
Resposta ao Degrau
Ensaio
Modelo Teórico 1
Modelo Teórico 2
30
A Tabela 4 apresenta as características da resposta deste modelo.
Tabela 4 - Características da resposta ao degrau unitário do sistema.
Caraterística Valor
Tempo de Subida 6,6 ms
Tempo de Acomodação 11,9 ms
Sobresinal 0%
Valor final 1132,8 rpm
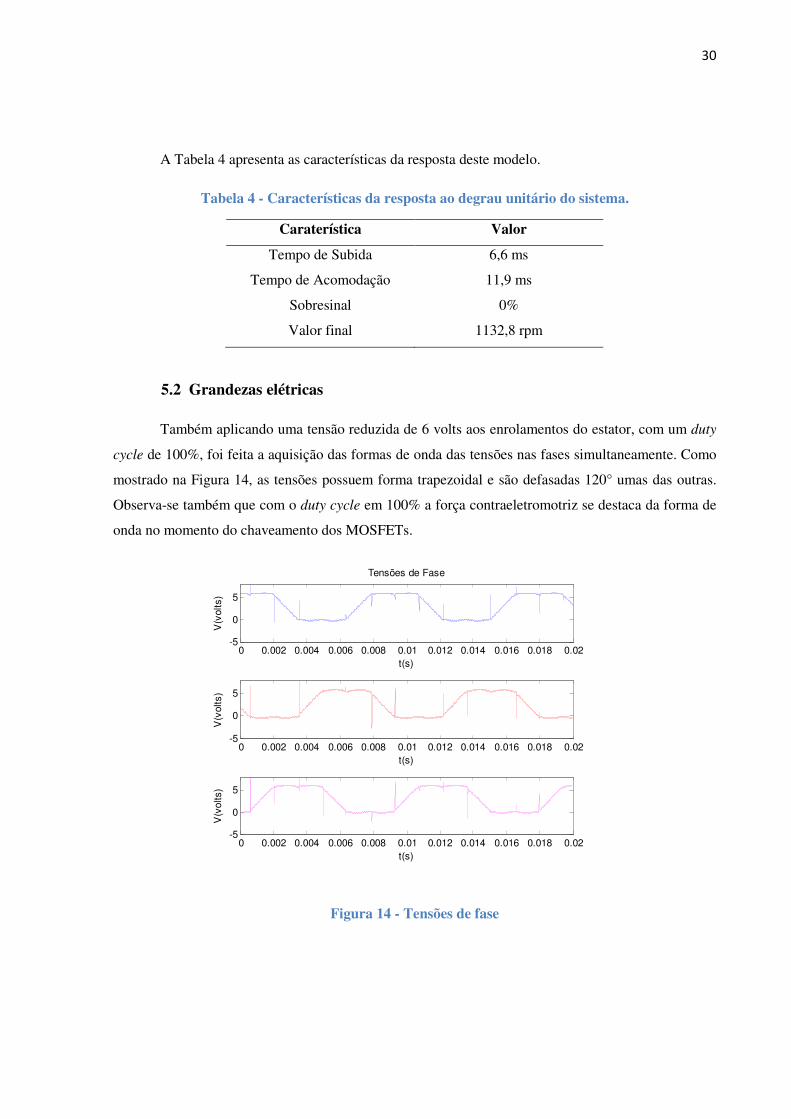
5.2 Grandezas elétricas
Também aplicando uma tensão reduzida de 6 volts aos enrolamentos do estator, com um duty
cycle de 100%, foi feita a aquisição das formas de onda das tensões nas fases simultaneamente. Como
mostrado na Figura 14, as tensões possuem forma trapezoidal e são defasadas 120° umas das outras.
Observa-se também que com o duty cycle em 100% a força contraeletromotriz se destaca da forma de
onda no momento do chaveamento dos MOSFETs.
Figura 14 - Tensões de fase
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-5
0
5
Tensões de Fase
t(s)
V(v
olts)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-5
0
5
t(s)
V(v
olts)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-5
0
5
t(s)
V(v
olts)
31
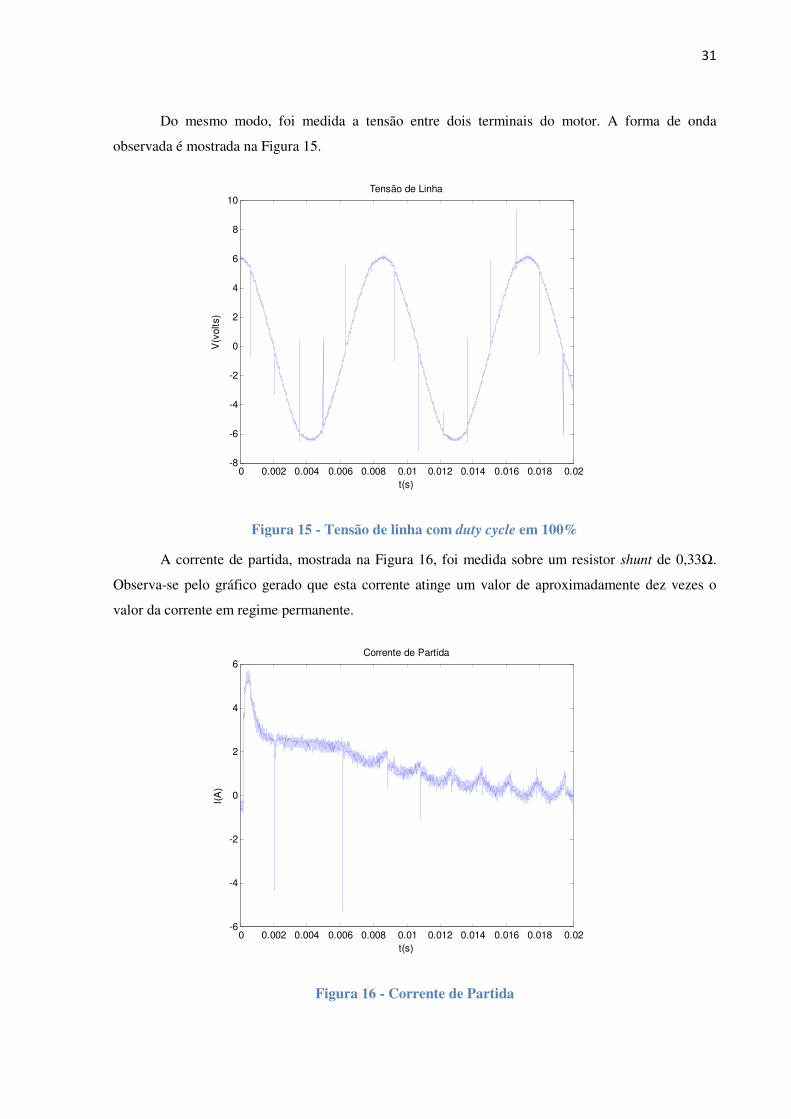
Do mesmo modo, foi medida a tensão entre dois terminais do motor. A forma de onda
observada é mostrada na Figura 15.
Figura 15 - Tensão de linha com duty cycle em 100%
A corrente de partida, mostrada na Figura 16, foi medida sobre um resistor shunt de 0,33Ω.
Observa-se pelo gráfico gerado que esta corrente atinge um valor de aproximadamente dez vezes o
valor da corrente em regime permanente.
Figura 16 - Corrente de Partida
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-8
-6
-4
-2
0
2
4
6
8
10Tensão de Linha
t(s)
V(v
olts)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-6
-4
-2
0
2
4
6Corrente de Partida
t(s)
I(A
)
32
5.3 Dificuldades e Sugestões para trabalhos futuros
Como mencionado anteriormente, a placa protótipo foi projetada para a realização de estudos
e ensaios. Os ensaios realizados têm como objetivo, além de verificar os resultados esperados, dar
condição de visualizar questões antes despercebidas, detectar possíveis falhas de projeto ou pontos a
serem melhorados, a fim de que o projeto definitivo não tenha estas deficiências e apresente a
qualidade desejada. Este item apresenta os problemas e dificuldades encontradas na placa protótipo e
as correções e complementações a serem observadas no projeto definitivo da placa de controle de um
motor Brushless DC.
A primeira deficiência detectada refere-se à ausência de isolação entre o circuito onde circula
a corrente de alimentação do motor e o circuito dos componentes digitais. Na placa protótipo o GND
das duas fontes de alimentação são separados apenas pelo resistor shunt, e por vezes, quando o motor
é acionado, a regulação da tensão de 5V fica comprometida, ocorrendo queda de tensão e ocasionando
o reset dos microcontroladores. Para solucionar este problema, ao invés de derivar a tensão de 5V da
fonte de 12V, deve-se utilizar uma fonte de 5V exclusivamente para o circuito digital, e derivar os
12V necessários para alimentar o CI IR2130, da fonte de alimentação do motor. Desta forma, os
circuitos das duas fontes não terão nenhum ponto em comum, e permanecerão completamente
isolados.
Outra dificuldade encontrada foi em relação ao controlador PID projetado para realizar o
controle em malha fechada da velocidade do motor. Após realizar o cálculo da velocidade, o
microcontrolador calcula o erro, que é o valor de entrada do controlador PID, que por sua vez, com o
erro calculado, ajusta o duty cycle e o ciclo se repete enquanto o motor permanece ligado. Neste ciclo,
para que o duty cycle seja ajustado como se deseja, é preciso conhecer o valor da tensão no barramento
de alimentação do motor. Nos ensaios realizados, foi utilizada uma fonte de bancada, e a tensão pré-
ajustada se elevava no momento em que o motor era acionado, tendo que ser reajustada com o motor
em rotação. Porém ao implementar o controlador PID, o sistema torna-se instável antes que se possa
reajustar a tensão, impossibilitando a verificação do desempenho do controlador. Apesar do controle
em malha fechada não ter sido devidamente testado, pois não foi possível utilizar outra fonte, este
problema levantou a questão da robustez do controlador, uma vez que pode ocorrer variação na tensão
de alimentação. Para solucionar este problema, basta utilizar o conversor A/D do microcontrolador
para ler o valor da tensão no barramento, tomando o cuidado de reduzi-la a níveis apropriados ao canal
analógico, e utilizar este valor também como entrada do controlador PID.
Outro ponto a ser observado, é que no projeto da placa protótipo foi colocado um conector
USB ligado ao PIC18F4550, com o intuito de estabelecer uma comunicação com o PC tornando
possível a supervisão de grandezas e variáveis ou a configuração de parâmetros e constantes sem a

33
necessidade de reprogramação do microcontrolador. Porém após terem sido programadas todas as
funções concernentes à interface de operação do motor, não restou espaço na memória RAM
suficiente para se utilizar as bibliotecas referentes à interface USB, então, por hora, esta idéia foi
descartada. No entanto, no projeto definitivo, torna-se mais conveniente utilizar o
dsPIC33FJ128MC506, citado no capítulo introdutório. Este microcontrolador possui memória RAM e
memória Flash suficientes, e outras características que o tornam uma ótima alternativa para
desempenhar as funções dos dois microcontroladores empregados na placa protótipo. Desta forma,
pode-se usar um transceiver USB externo ou mesmo a comunicação serial RS-232 para permitir a
troca de dados com um PC. Além disso, ao utilizar um único microcontrolador, o custo total de
produção da placa será, possivelmente, reduzido.

34
6. Conclusão
Neste trabalho foram abordados os princípios de funcionamento de um motor Brushless DC, e
seu método de acionamento utilizando um microcontrolador. Porém, o método aqui utilizado não
focou demasiadamente em um microcontrolador específico, pois o principal objetivo é sim tê-lo como
aliado no desenvolvimento do projeto, podendo ele ser dos mais diversos fabricantes, tipos e famílias.
Com isso, o projeto de uma placa controladora, que a princípio aparenta ser uma tarefa complexa,
torna-se muito mais simples quando se alia um microcontrolador.
Contudo, pode-se concluir também que as ferramentas computacionais são de essencial
importância em todas as fases do desenvolvimento do projeto e na obtenção de resultados. O
comportamento dinâmico do motor foi analisado e um método de obtenção de sua função de
transferência foi apresentado. A placa protótipo desenvolvida foi posta à prova nos ensaios realizados,
foi obtido um bom resultado, e algumas propostas de melhorias no hardware também foram
apresentadas.

35
36
Bibliografia
1 YEDAMALE, P.; MICROCHIP Technology Inc. AN885: Brushless DC (BLDC) Motor
Fundamentals. Disponível em: <http://ww1.microchip.com/downloads/en/AppNotes/00885a.pdf>
Acesso em: Acesso em: 1 Jul. 2010.
2 BROWN, W.; MICROCHIP Technology Inc. AN857: Brushless DC Motor Control Made Easy.
Disponível em: < http://ww1.microchip.com/downloads/en/AppNotes/00857a.pdf>. Acesso em: 1 Jul.
2010.
3 MARTINS, D. C.; BARBI, I. Introdução ao estudo dos conversores CC-CA. Florianópolis : Ed.
dos Autores, 2005. 394p.
4 INTERNATIONAL Rectifier. AN985: Six-Output 600V MGDs Simplify 3-Phase Motor Drives.
Disponível em: < http://www.irf.com/technical-info/appnotes/an-985.pdf>. Acesso em: 3 Jul. 2010.
5 MAXON Motor. Folha de dados. Disponível em:
<https://shop.maxonmotor.com/maxon/assets_external/Katalog_neu/eshop/Downloads/Katalog_PDF/
maxon_ec_motor/EC-programm/new/newpdf_09/EC-22-266520_09_EN_154.pdf>. Acesso em: 10
Jun. 2010.
6 MICROCHIP Technology Inc. Folha de dados - dsPIC30F2020. Disponível em:
<http://ww1.microchip.com/downloads/en/DeviceDoc/70178C.pdf>. Acesso em: 10 Mar. 2010.
7 D’SOUZA, S.; MICROCHIP Technology Inc. AN957: Sensored BLDC Motor Control Using
dsPIC30F2010. Disponível em:
<http://ww1.microchip.com/downloads/en/AppNotes/BLDC%20MC%2000957a.pdf>. Acesso em: 5
Jul. 2010.
8 MAXON Motor. Catálogo. Disponível em:
<https://shop.maxonmotor.ch/maxon/assets_external/Katalog_neu/eshop/Downloads/Katalog_PDF/ma
xon_ec_motor/Technik_kurz_und_buendig_08_026-29_e.pdf> Acesso em: 10 Jun. 2010.

37
38
Apêndice A – Placa Protótipo
39

40









![Monitorando Rede Com Zabbix No Debian 7 [Artigo]](https://img.document.onl/doc/110x75/55cf9030550346703ba3a557/monitorando-rede-com-zabbix-no-debian-7-artigo.jpg)



















