Embed Size (px)
Citation preview

UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
DEPARTAMENTO ACADÊMICO DE QUÍMICA E BIOLOGIA
CURSO DE BACHARELADO EM QUÍMICA TECNOLÓGICA
OTÁVIO BERUSKI
MÉTODO PARA DETERMINAÇÃO DO GRUPO PONTUAL DE
MOLÉCULAS
TRABALHO DE CONCLUSÃO DE CURSO
CURITIBA
2011

OTÁVIO BERUSKI
MÉTODO PARA DETERMINAÇÃO DO GRUPO PONTUAL DE
MOLÉCULAS
Trabalho de Conclusão de Curso de gradu-
ação, apresentado à disciplina de Trabalho
de Conclusão de Curso II, do Curso de
Bacharelado em Química Tecnológica do
Departamento Acadêmico de Química e
Biologia � DAQBI � da Universidade Tecno-
lógica Federal do Paraná � UTFPR, como
requisito parcial para obtenção do título de
Bacharel.
Orientador: Prof. Dr. Luciano Nassif Vidal
CURITIBA
2011

TERMO DE APROVAÇÃO
OTÁVIO BERUSKI
MÉTODO PARA DETERMINAÇÃO DO GRUPO PONTUAL DE MOLÉCULAS
Trabalho de Conclusão de Curso apresentado como requisito parcial à obtenção do
grau de BACHAREL EM QUÍMICA TECNOLÓGICA do Departamento Acadêmico de
Química e Biologia (DAQBI) do Câmpus Curitiba da Universidade Tecnológica
Federal do Paraná – UTFPR e APROVADO pela seguinte banca examinadora:
Membro 1 – PROF. DR. JOÃO BATISTA FLORIANO Universidade Tecnológica Federal do Paraná (UTFPR)
Departamento Acadêmico de Química e Biologia
Membro 2 – PROF. DR. RAFAEL CARVALHO BARRETO Universidade Tecnológica Federal do Paraná (UTFPR) Departamento Acadêmico de Física
Orientador – PROF. DR. LUCIANO NASSIF VIDAL Universidade Tecnológica Federal do Paraná (UTFPR) Departamento Acadêmico de Química e Biologia
Coordenador de Curso – PROF. DR. JOÃO BATISTA FLORIANO
Curitiba, 28 de novembro de 2011.

AGRADECIMENTOS
Apesar de se tratar apenas de um trabalho de conclusão de curso, é o primeiro de
grande importância em minha carreira, e portanto torna-se necessário expressar minha
gratidão a todos que de alguma maneira me ajudaram.
Agradeço enormemente ao Professor Dr. Luciano Nassif Vidal pela oportunidade e
orientação, visto que sem ele eu nunca teria sequer começado este trabalho.
Agradeço aos meus colegas de trabalho, amigos e caros Professores, sejam estes teóricos
ou experimentais, que eventualmente mostraram algum interesse, me deram apoio moral
para concluir o trabalho, ou apenas suportaram meus devaneios e reclamações.
Finalmente, gostaria de agradecer todos àqueles que me ajudaram indiretamente, in-
clusos aqui toda a comunidade da Universidade Tecnológica Federal do Paraná, assim
como meus familiares.

Resumo
BERUSKI, Otávio. Método para Determinação do Grupo Pontual de Moléculas.
2011. Trabalho de Conclusão de Curso (Bacharelado em Química Tecnológica) �
Departamento Acadêmico de Química e Biologia, Universidade Tecnológica Federal
do Paraná. Curitiba, 2011.
O presente trabalho apresenta uma nova abordagem para a encontrar o grupo pon-
tual de moléculas, empregando conceitos mais familiares para físicos e químicos,
onde o grupo pontual é determinado a partir das seguintes informações: (1) Tipo
de rotor a qual pertence a molécula (esférico, prolato, oblato, linear ou assimétrico),
(2) O número de átomos simetricamente equivalentes, ou seja, aqueles átomos cujas
posições são permutadas pela ação de uma operação de simetria (ex. os hidrogênios
da molécula de água), (3) A matriz de distâncias interatômicas, (4) As massas de
cada átomo que compõe a molécula e (5) Tipo de polígono ou poliedro regular for-
mado pelos átomos simetricamente equivalentes. O método proposto permite que o
grupo pontual total seja identi�cado, e não apenas um subgrupo, a partir de um nú-
mero reduzido de operações de simetria, sendo determinadas, principalmente, pelo
tipo de rotor da molécula. Este método foi implementado em um programa escrito
em linguagem C, que será posteriormente incorporado a um programa que efetua
o cálculo das intensidades dos espectros infravermelho e Raman, o qual é capaz de
explorar de forma bastante e�ciente a simetria molecular, porém não possui ainda
uma rotina para identi�car o grupo pontual molecular.
Palavras-chave: Simetria Espacial. Grupo Pontual. Operações de Simetria.

Abstract
BERUSKI, Otávio. Method to determinate the Point Group of Molecules. 2011.
Trabalho de Conclusão de Curso (Bacharelado em Química Tecnológica) � Depar-
tamento Acadêmico de Química e Biologia, Universidade Tecnológica Federal do
Paraná. Curitiba, 2011.
The present work describes a new method to �nd the point groups of molecules,
employing concepts more familiar to chemists and physicists, where the point group
is found from the following information: (1) The type of rotor which the molecule
belongs (spherical, prolate, oblate, linear or asymmetric), (2) The number of sym-
metrically equivalent atoms, that is, that atoms whose positions are interchanged
trough a symmetry operation (ex. the hydrogens in a water molecule), (3) The
interatomic distance matrix, (4) The atomic masses and (5) The polygon or polyhe-
dron formed by the symmetrically equivalent atoms. The proposed method allows
the identi�cation of the full point group of any molecule from a reduced number
of symmetry operations. This method has been implemented in a program written
in C language and will be incorporated into a code developed for calculations of
the intensities of infrared and Raman spectra. The last can explore e�ciently the
molecular symmetry but doesn't have a routine for automatic identi�cation of the
molecular point group.
Keywords: Spatial Symmetry. Point Groups. Symmetry Operations.

Lista de Figuras
1 Operações de Simetria: (a) Re�exão em relação a um plano, (b) Rotação ao redor de
um eixo, (c) Rotação Imprópria ao redor de um eixo, e (d) Inversão. . . . . . . . . . 13
2 Átomos e Distâncias Interatômicas da molécula de água. . . . . . . . . . . . . . . . 15
3 Molécula de água após uma operação C2. . . . . . . . . . . . . . . . . . . . . . . 16
4 Átomos da molécula de benzeno. . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5 Átomos da molécula de p-dinitrobenzeno. . . . . . . . . . . . . . . . . . . . . . . 18
6 Molécula de p-dinitrobenzeno após uma operação σ. . . . . . . . . . . . . . . . . . 19
7 Exemplos de rotores lineares: a) dióxido de carbono, b) cloreto de hidrogênio, c) etino,
e d) sulfeto de carbonila. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
8 Exemplos de rotores simétricos: a) cloreto de metila, b) aleno, c) amônia, e d) benzeno. 23
9 Exemplos de rotores esféricos: a) metano, b) hexa�uoreto de enxofre, e c) dodecaborato
(hidrogênios não representados). . . . . . . . . . . . . . . . . . . . . . . . . . . 23
10 Exemplos de rotores assimétricos: a) água, b) anilina, c) �uoreto de tionila, e d) pirrol. 23
11 a) Molécula de Tetrametilsilano, b) Tetraedro Truncado . . . . . . . . . . . . . . . 26
12 Algoritmo para identi�cação do Grupo Pontual de um Rotor Simétrico. . . . . . . . . 27
13 Algoritmo para identi�cação do Grupo Pontual de um Rotor Assimétrico. . . . . . . . 28
14 Moléculas contendo conjuntos de ASE dos casos a) Linear: Dióxido de Carbono; e b)
Polígono oblato planar: Ciclopropano, com k = 3, neste caso. . . . . . . . . . . . . . 31
15 Molécula contendo um conjunto de ASE do caso Polígono assimétrico planar: Aleno,
com k = 4, neste caso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
16 Moléculas contendo conjuntos de ASE do caso Prisma prolato: a) Ferroceno eclipsado,
um prisma; e b) Ferroceno anti, um antiprisma; ambos com k = 10 e hidrogênios não
representados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
17 Molécula contendo um conjunto de ASE do caso Prisma Irregular, com k = 8 . . . . . 33
18 Moléculas de água, evidenciando a) o Centro de Massa da molécula, e b) o Eixo C2 da
molécula. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
19 Moléculas de benzeno, evidenciando a) o Centro de Massa da molécula, e b) o Eixo C6
da molécula. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
20 Moléculas de p-dinitrobenzeno, evidenciando a) o Centro de Massa da molécula, e b) o
Eixo C2 da molécula. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37

21 Molécula de Benzeno, evidenciando: a) as posições dos átomos e o centro de massa da
molécula, b) o vetor posição do ponto médio entre os hidrogênios 1 e 5, e c) a con�rmação
da existência do eixo C⊥2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
22 Molécula de Água, evidenciando: a) o centro de massa e o eixo C2 da molécula, b) o
vetor posição do hidrogênio escolhido, e c) o plano σv gerado pelos vetores escolhidos. . 40
23 Molécula pertencente ao grupo pontual Cs a) Fluoreto de Tionila, e b) plano de re�exão
σ da molécula. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
24 Molécula de Amônia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
25 Molécula de Aleno, conformação anti. . . . . . . . . . . . . . . . . . . . . . . . . 47
26 Molécula de 1-Metil-2-pirrolidona. . . . . . . . . . . . . . . . . . . . . . . . . . . 54
27 Molécula de Amônia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
28 Molécula de bis-Pentacarbonilcobalto, em conformação anti. . . . . . . . . . . . . . 60
29 Molécula de Cubano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
30 Molécula de Hexanitrocuprato. . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
31 Molécula de Peróxido de hidrogênio. . . . . . . . . . . . . . . . . . . . . . . . . . 72
32 Molécula de Tetrametilsilano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74

Sumário
1 INTRODUÇÃO 9
2 FUNDAMENTAÇÃO TEÓRICA 11
2.1 Operações de Simetria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Grupos Pontuais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3 Átomos Simetricamente Equivalentes . . . . . . . . . . . . . . . . . . . . . 15
2.4 Ponto Invariante às Operações de Simetria . . . . . . . . . . . . . . . . . . 19
2.5 Tensor de Inércia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6 Tipos de Rotores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3 ALGORITMOS PARA ALOCAÇÃO DOS GRUPOS PONTUAIS 25
3.1 Rotores Lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 Rotores Esféricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3 Rotores Simétricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.4 Rotores Assimétricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 29
4.1 Eixo de Rotação Própria: Cn . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.1 Arranjo Pontual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.2 Arranjo Linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.3 Polígono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1.4 Prisma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.1.5 Con�rmação do Eixo de Maior Ordem . . . . . . . . . . . . . . . . 34
4.2 Eixos C2 Perpendiculares: C⊥2 . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3 Eixos de Rotação Imprópria: S2n e Sn . . . . . . . . . . . . . . . . . . . . . 39
4.4 Planos de Re�exão: σ e σv . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.5 Inversão: i . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5 EXEMPLOS 42
5.1 Amônia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.2 Aleno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6 CONCLUSÕES 52

REFERÊNCIAS 53
A Exemplos do software 54
A.1 1-Metil-2-pirrolidona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
A.2 Amônia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
A.3 bis-Pentacarbonilcobalto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
A.4 Cubano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
A.5 Hexanitrocuprato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
A.6 Peróxido de Hidrogênio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
A.7 Tetrametilsilano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74

1 INTRODUÇÃO 9
1 INTRODUÇÃO
Na Química, simetria é uma ferramenta útil na determinação de propriedades molecu-
lares, como atividade óptica, momento de dipolo elétrico, regras de seleção para infraver-
melho e Raman, degenerescência dos modos normais de vibração, entre outras (Wilson,
Decius e Cross, 1990; Ivanov e Schüürmann, 1999). Muitos softwares desenvolvidos para
cálculos teóricos possuem módulos que localizam o grupo pontual de uma molécula (Gaus-
sian 09, 2009; DALTON 2.0, 2005), poupando esforço e recursos computacionais.
A simetria presente nas moléculas é tratada através da Teoria de Grupos, usando de
grupos de simetria. Na Matemática, um Grupo é um conjunto com a operação identidade,
onde todo elemento possui um inverso contido no próprio grupo (Baumslag e Chandler,
1968). Entre os grupos de simetria, os que são utilizados na Química, para moléculas,
denominam-se Grupos Pontuais, que são de�nidos como grupos de simetrias geométricas
que contém, no mínimo, um único ponto invariante a todas as transformações (Harris e
Bertolucci, 1989). As transformações contidas nesses Grupos Pontuais são chamadas de
Operações de Simetria.
Apesar de estarem presentes em muitos softwares, existem relativamente poucos tra-
balhos publicados a respeito de métodos de identi�cação de grupos pontuais, utilizando
técnicas baseadas, de maneira geral, em conceitos matemáticos abstratos para localizar
o grupo pontual de uma molécula. A abordagem utilizada por Balasubramanian (1995)
faz uso da matriz de distâncias Euclidiana, localizando permutações que não alteram a
matriz de distâncias Euclidiana. Estas permutações representam operações de simetria re-
alizadas sobre a molécula, e juntas formam o grupo de distância Euclidiana, de�nida pelo
autor (Balasubramanian, 1995). No algoritmo, cada permutação é veri�cada quanto à
condição do grupo de distância Euclidiana sem que sejam necessárias multiplicações entre
matrizes. As permutações que satisfaçam a condição mencionada representam operações
de simetria realizadas sobre a molécula.
Outro método utiliza a fórmula estrutural da molécula, valendo-se das ligações e ro-
tulação dos átomos (Chen, Huang e Gilson, 2004; Ivanov, 2004; Ivanov e Schüürmann,
1999). Ivanov (2004) e Ivanov e Schüürmann (1999) utilizam um grupo de automor�smo
do grá�co que representa a topologia da molécula, onde um código é gerado, represen-
tando os átomos, ligações e número do átomo. Para cada permutação dos vértices deste

1 INTRODUÇÃO 10
grá�co, um novo código é gerado, sendo comparado com o código de referência. Atra-
vés desta comparação, são localizadas operações de simetria na molécula. Assim como
Balasubramanian (1995), as permutações realizadas no grá�co devem pertencer ao grupo
de distância Euclidiana, a �m de representar uma operação de simetria. Diferentemente
de Balasubramanian (1995), o método proposto por Ivanov e Schüürmann (1999) e aper-
feiçoado por Ivanov (2004) não aplica todas as possíveis permutações, sendo descartadas
permutações que interferirem na conectividade original do grá�co.
Chen, Huang e Gilson (2004) utilizam um algoritmo inspirado no descrito por Ivanov
e Schüürmann (1999), trabalhando, adicionalmente, com estruturas de ressonância. Da
mesma maneira, nomes são gerados e comparados após cada permutação, entretanto, estes
nomes possuem, segundo o autor, uma maior quantidade de informações e são facilmente
calculados, facilitando a identi�cação de pontos assimétricos e aprimorando a e�ciência
do algoritmo.
As abordagens relatadas para a detecção do grupo pontual utilizam conceitos que
não são tratados em um curso de graduação em química, como teoria de grá�cos, o que
di�culta o entendimento dos algoritmos empregados por estudantes de química. Tendo isso
em mente, este trabalho tem como objetivo descrever um método que emprega conceitos
mais familiares aos químicos, onde o grupo pontual é determinado a partir das seguintes
informações: (1) Tipo de rotor ao qual pertence a molécula, (2) O número de átomos
simetricamente equivalentes, ou seja, aqueles cujas posições são permutadas pela ação
de uma operação de simetria, (3) A matriz de distâncias interatômicas, (4) A massa
de cada átomo que compõe a molécula, e (5) O tipo de polígono ou poliedro regular
formado pelos átomos simetricamente equivalentes. O método proposto permite que o
grupo pontual total seja identi�cado, e não apenas um sub-grupo, a partir de um número
reduzido de operações de simetria. Este método foi implementado em um programa escrito
em linguagem C, e testado em moléculas pertencentes a diferentes grupos pontuais. O
trabalho encontra-se dividido em de�nições, onde são apresentados conceitos essenciais ao
método desenvolvido, como o conceito de átomos simetricamente equivalentes e o tensor
de inércia; algoritmos para a localização do grupo pontual; identi�cação das operações
de simetria existentes na molécula, como rotação própria e re�exão; exemplos numéricos
descrevendo todo o procedimento; e as conclusões obtidas a partir deste trabalho.

2 FUNDAMENTAÇÃO TEÓRICA 11
2 FUNDAMENTAÇÃO TEÓRICA
2.1 Operações de Simetria
Uma Operação de Simetria é uma transformação realizada sobre um objeto que re-
sulta em uma orientação igual à original (Harris e Bertolucci, 1989). Isto signi�ca, para
moléculas, que, após a aplicação de uma operação de simetria, a molécula deve mostrar-se
exatamente igual a antes da transformação, com átomos ocupando posições anteriormente
pertencentes a átomos da mesma natureza, considerando que átomos de mesma natureza
são completamente indistinguíveis uns dos outros. As operações utilizadas de tal maneira
são cinco, de�nidas segundo Harris e Bertolucci (1989):
� Identidade (E) é a operação básica, inerente a qualquer molécula e grupo pontual.
Esta operação não altera em nada a molécula, sendo necessária para satisfazer as
condições matemáticas de um grupo. Em notação de matrizes, esta operação é
representada da seguinte maneira:
E =
1 0 0
0 1 0
0 0 1
(1)
Esta matriz, assim como as demais operações, encontram-se de tal maneira a atuar
em um vetor coluna contendo o átomo de uma molécula.
� Re�exão (σ) é uma re�exão da molécula através de um plano que divide a molécula
em duas partes iguais. Por exemplo, o próprio plano de uma molécula planar e o
plano que passa entre os átomos de hidrogênio e cruza o átomo de oxigênio em uma
molécula de água (Figura 1a). A representação desta operação em forma de matriz
depende do plano de re�exão a que está se referindo, por exemplo, uma re�exão
através do plano cartesiano xy:
σ =
1 0 0
0 1 0
0 0 −1
(2)

2 FUNDAMENTAÇÃO TEÓRICA 12
� Rotação Própria (Cn) é uma rotação, em torno de um eixo C, de um ângulo de
2π/n. Por exemplo, o eixo C3 de uma molécula de amônia, onde o eixo é equidis-
tante aos três átomos de hidrogênio e intercepta o átomo de nitrogênio (Figura 1b).
Consequência desta de�nição é que, quando existir um eixo Cn, existirão, também,
eixos de ordem igual a cada divisor de n. Assim como a re�exão, a notação de
matriz desta operação depende do eixo em torno de qual será realizado a rotação,
por exemplo, o eixo cartesiano z, no sentido anti-horário:
Cn =
cos 2π
n− sin 2π
n0
sin 2πn
cos 2πn
0
0 0 1
(3)
� Rotação Imprópria (Sn) é uma rotação de um ângulo de 2π/n em torno do eixo S,
seguida de uma re�exão através de um plano perpendicular ao eixo. Por exemplo,
um dos eixos S4 da molécula do metano, que passa entre os quatro hidrogênios,
cruzando no meio de duas arestas perpendiculares do tetraedro (Figura 1c). Como
esta operação equivale a uma rotação própria seguida de uma re�exão, a notação de
matrizes pode ser representada através da aplicação das matrizes correspondentes
a estas operações, por exemplo, uma rotação em torno do eixo z seguida de uma
re�exão através do plano xy:
Sn = σvCn =
1 0 0
0 1 0
0 0 −1
cos 2πn
sin 2πn
0
− sin 2πn
cos 2πn
0
0 0 1
(4)
� Inversão (i) nada mais é do que uma rotação imprópria do tipo S2, ou seja, é a
inversão de todos os átomos em relação a um ponto, o centro de inversão. Por
exemplo, o átomo de enxofre, no hexa�uoreto de enxofre, é o centro de inversão da
molécula (Figura 1d). Esta operação é representada pela seguinte matriz:
i =
−1 0 0
0 −1 0
0 0 −1
(5)

2 FUNDAMENTAÇÃO TEÓRICA 13
Figura 1: Operações de Simetria: (a) Re�exão em relação a um plano, (b) Rotação ao redor de um
eixo, (c) Rotação Imprópria ao redor de um eixo, e (d) Inversão.
No caso das rotações, existe a possibilidade de realizar repetidas operações seguidas
umas das outras. Quando isso ocorre, o número de vezes em que a rotação é executada
aparece como um sobre índice na operação, por exemplo, duas rotações C3 seguidas são
representada como uma rotação C23 .
Quando uma operação anula o efeito de outra, ela é considerada a operação inversa,
por exemplo, uma rotação C5 possui como inversa uma operação C45 , que é o mesmo
que girar a molécula em um mesmo ângulo 2π/5, porém na direção oposta. No caso das
operações E, σ e i, suas inversas são elas mesmas.
Em alguns casos, existem algumas particularidades referentes a determinadas opera-
ções, de modo a distingui-las (Harris e Bertolucci, 1989): um plano σh refere-se a um
plano perpendicular ao eixo de rotação de maior ordem; um plano σv refere-se a um plano
que contém o eixo de maior ordem; um plano σd refere-se a um plano diretamente sobre
um ângulo diedral de uma ligação; e um eixo C⊥2 refere-se a um eixo C2 perpendicular ao
eixo de maior ordem.
2.2 Grupos Pontuais
Toda molécula pertence a um Grupo Pontual, sendo de�nido através das operações de
simetria apresentadas por esta. Ao todo, são 17 famílias de grupos pontuais utilizados em

2 FUNDAMENTAÇÃO TEÓRICA 14
simetria molecular, cada qual com seu conjunto de elementos de simetria que os de�nem.
Conforme mencionado na Introdução, um grupo pontual contém, além das operações de
simetria que o de�nem, o inverso de cada uma dessas operações. A Tabela 1 apresenta os
grupos pontuais, juntamente com as operações representativas de cada grupo.
Tabela 1: Grupos Pontuais e suas Operações de Simetria
Grupo Pontual Operações de Simetria
C1 E
Cs E, σ
Ci E, i
Sn E, Sn
Cn E, Cn
Cnh E, Cn, Sn, σh
Cnv E, Cn, n σv
Dn E, Cn, n C⊥2
Dnh se n par: E, Cn, n C⊥2 , Sn, σh,n2σv, n2 σd, i
se n ímpar: E, Cn, n C⊥2 , Sn, σh, n σv
Dnd se n par: E, Cn, n C⊥2 , S2∗n, n σd
se n ímpar: E, Cn, n C⊥2 , S2∗n, n σd, i
Td E, 8 C3, 3 C2, 6 S4, 6 σd
Th E, 8 C3, 3 C2, 8 S6, 3 σd, i
Oh E, 6 C4, 8 C3, 3 C2, 6 C⊥2 , 8 S6, 6 S4, 3 σh, 6 σd, i
Ih E, 12 C5, 12 C25 , 20 C3, 15 C2, 12 S10, 12 S3
10, 20 S6, 15 σ, i
C∞v E, C∞, ∞ σv
D∞h E, C∞, ∞ C⊥2 , S∞, σh, ∞ σv, i
Kh Todas as operações, e.g., ∞ C∞
Alguns grupos pontuais, por exemplo os pertencentes às duas grandes classi�cações
C (Cíclicos) e D (Diedrais) (Wilson, Decius e Cross, 1990), possuem diferentes números
de operações de simetria, apesar de pertencerem à mesma família de grupos pontuais,
variando conforme a ordem da operação de Rotação Própria, por exemplo os grupos
pontuais C3v e C5v ambos pertencem aos grupos Cnv. Por tal motivo, estes grupos são

2 FUNDAMENTAÇÃO TEÓRICA 15
genericamente descritos com um subíndice n, indicando a maior ordem do eixo Cn presente
na molécula.
2.3 Átomos Simetricamente Equivalentes
Átomos simetricamente equivalentes (ASE) são aqueles de mesma espécie isotópica
que são permutados entre si pela ação de uma operação de simetria, como por exemplo os
hidrogênios de uma molécula de água. A existência de átomos simetricamente equivalentes
pode ser veri�cada através da matriz de distâncias Euclidiana. Dados as posições atômicas
ri de uma molécula de N átomos, os elementos da matriz de distâncias da molécula são
dados por:
Dij = ‖ri − rj‖, i, j = 1, 2, . . . , N (6)
Os átomos simetricamente equivalentes possuem cada valor de sua coluna em D pre-
sente nas colunas de outros átomos simetricamente equivalentes, ou seja, cada valor pre-
sente na coluna do átomo i deve estar presente na coluna do átomo j para que estes sejam
simetricamente equivalentes. Tomemos como exemplo uma molécula de água (Figura 2).
As coordenadas cartesianas de cada átomo da molécula podem ser dadas como na matriz
a seguir:
XH2O =
xH1 xO xH2
yH1 yO yH2
zH1 zO zH2
(7)
Figura 2: Átomos e Distâncias Interatômicas da molécula de água.
Onde (xi, yi, zi) são as coordenadas de um átomo pertencente à molécula. Com estas
coordenadas obtém-se a matriz de distâncias da molécula:

2 FUNDAMENTAÇÃO TEÓRICA 16
DH2O =
H1 O H2
0 d1 d2 H1
d1 0 d1 O
d2 d1 0 H2
(8)
Pode-se observar que os hidrogênios são simetricamente equivalentes, pois ambos pos-
suem as distâncias d1 e d2. Portanto, uma operação de simetria observada na molécula
de água pode permutar os hidrogênios, de modo que a orientação da molécula permaneça
inalterada. Para a água, uma rotação própria C2 é um exemplo de operação de sime-
tria que pode ser aplicada à molécula, onde o eixo corta o átomo de oxigênio e passa
equidistante aos átomos de hidrogênio. Aplicando esta operação os átomos de hidrogênio
são permutados entre si, e o oxigênio permanece na mesma posição, resultando em uma
orientação da molécula igual à original, como visto na Figura 3, pois os átomos são indis-
tinguíveis, dado que a numeração destes é apenas um método para melhor visualizar as
operações.
Figura 3: Molécula de água após uma operação C2.
Como outro exemplo, será usado o benzeno (Figura 4). Por conveniência, os carbonos
e hidrogênios serão analisados separadamente. As coordenadas cartesianas dos carbonos
encontram-se na matriz a seguir:
XC6 =
xC1 xC2 xC3 xC4 xC5 xC6
yC1 yC2 yC3 yC4 yC5 yC6
zC1 zC2 zC3 zC4 zC5 zC6
(9)
Calculando-se as distâncias interatômicas, obtém se a seguinte matriz de distâncias:

2 FUNDAMENTAÇÃO TEÓRICA 17
Figura 4: Átomos da molécula de benzeno.
DC6 =
C1 C2 C3 C4 C5 C6
0 d12 d13 d14 d13 d12 C1
d12 0 d12 d13 d14 d13 C2
d13 d12 0 d12 d13 d14 C3
d14 d13 d12 0 d12 d13 C4
d13 d14 d13 d12 0 d12 C5
d12 d13 d14 d13 d12 0 C6
(10)
De onde observa-se que todos os carbonos são simetricamente equivalentes. Fazendo-
se a análise dos hidrogênios, chega-se à mesma conclusão. Como na água, uma operação
de simetria observada no benzeno deve permutar os carbonos entre si, bem como os
hidrogênios. No caso do benzeno, uma rotação C6, onde o eixo passa perpendicularmente
pelo plano da molécula, permuta os hidrogênios entre si, assim como os carbonos, onde
os átomos da posição 1 passam a ocupar a posição 2, e assim por diante.
Em um último exemplo, será considerado o p-dinitrobenzeno (Figura 5). Novamente,
os hidrogênios serão desconsiderados, a �m de simpli�car o exemplo. As coordenadas
cartesianas da molécula encontram-se na matriz X a seguir:
XC6N2O4 =
xC1 xC2 xC3 xC4 xC5 xC6 xN1 xN2 xO1 xO2 xO3 xO4
yC1 yC2 yC3 yC4 yC5 yC6 yN1 yN2 yO1 yO2 yO3 yO4
zC1 zC2 zC3 zC4 zC5 zC6 zN1 zN2 zO1 zO2 zO3 zO4
(11)De onde se obtém a seguinte matriz de distância para a molécula:

2 FUNDAMENTAÇÃO TEÓRICA 18
Figura 5: Átomos da molécula de p-dinitrobenzeno.
DC6N2O4 =
C1 C2 C3 C4 C5 C6
0 dC1C2 dC1C3 dC1C4 dC1C3 dC1C2 C1
dC1C2 0 dC1C2 dC1C3 dC1C4 dC1C3 C2
dC1C3 dC1C2 0 dC1C2 dC1C3 dC1C4 C3
dC1C4 dC1C3 dC1C2 0 dC1C2 dC1C3 C4
dC1C3 dC1C4 dC1C3 dC1C2 0 dC1C2 C5
dC1C2 dC1C3 dC1C4 dC1C3 dC1C2 0 C6
dC1N1 dC2N1 dC2N2 dC1N2 dC2N2 dC2N1 N1
dC1N2 dC2N2 dC2N1 dC1N1 dC2N1 dC2N2 N2
dC1O1 dC2O1 dC2O4 dC1O3 dC2O3 dC2O2 O1
dC1O1 dC2O2 dC2O3 dC1O4 dC2O4 dC2O1 O2
dC1O3 dC2O3 dC2O2 dC1O1 dC2O1 dC2O4 O3
dC1O3 dC2O4 dC2O1 dC1O1 dC2O2 dC2O3 O4
DC6N2O4 =
N1 N2 O1 O2 O3 O4
dC1N1 dC1N2 dC1O1 dC1O1 dC1O3 dC1O1 C1
dC2N1 dC2N2 dC2O1 dC2O2 dC2O3 dC2O4 C2
dC2N2 dC2N1 dC2O4 dC2O3 dC2O2 dC2O1 C3
dC1N2 dC1N1 dC1O3 dC1O3 dC1O1 dC1O1 C4
dC2N2 dC2N1 dC2O3 dC2O4 dC2O1 dC2O2 C5
dC2N1 dC2N2 dC2O2 dC2O1 dC2O4 dC2O3 C6
0 dN1N2 dN1O1 dN1O1 dN1O3 dN1O3 N1
dN1N2 0 dN1O3 dN1O3 dN1O1 dN1O1 N2
dN1O1 dN1O3 0 dO1O2 dO1O3 dO1O4 O1
dN1O1 dN1O3 dO1O2 0 dO1O4 dO1O3 O2
dN1O3 dN1O1 dO1O3 dO1O4 0 dO1O2 O3
dN1O3 dN1O1 dO1O4 dO1O3 dO1O2 0 O4
(12)

2 FUNDAMENTAÇÃO TEÓRICA 19
Analisando esta extensa matriz observa-se que existem quatro conjuntos de átomos
simetricamente equivalentes: os nitrogênios; os oxigênios; os carbonos 2, 3, 5 e 6; e os
carbonos 1 e 4. Se fossem incluídos os hidrogênios, ligados aos carbonos 2, 3, 5, e 6, estes
pertenceriam a outro conjunto, totalizando cinco conjuntos de átomos simetricamente
equivalentes. Para este caso, um plano de re�exão σ perpendicular ao plano da molécula
e passando entre os carbonos 2 e 3, e entre os carbonos 5 e 6, resulta em uma permutação
dos carbonos 1, 2 e 6 pelos carbonos 4, 3 e 5, respectivamente; os nitrogênios, entre si; os
oxigênios 1 e 2 pelos oxigênios 3 e 4, respectivamente. Esta nova orientação, Figura 6, é
igual à original, considerando que os átomos são indistinguíveis.
Figura 6: Molécula de p-dinitrobenzeno após uma operação σ.
2.4 Ponto Invariante às Operações de Simetria
Conforme mencionado na seção 1, os grupos pontuais são assim denominados por
possuírem ao menos um ponto que seja invariante a todas as operações de simetria contidas
no grupo. Em uma molécula, quando os átomos são representados por massas pontuais,
um ponto que satisfaz esta condição é o Centro de Massa da molécula. Por de�nição, uma
operação de simetria não muda a orientação de uma molécula, conforme mencionado na
seção 2.1, e, estendendo-se esta de�nição, conforme mencionado na seção 2.3, isto equivale
a uma permutação dos ASE da molécula. Portanto, após uma operação de simetria, as
posições que continham determinada massa devem conter a mesma massa, deixando o
Centro de Massa intacto.
Para suportar esta a�rmação, considere uma molécula com um número qualquer de
átomos. O Centro de Massa da molécula é dado por, conforme descrito na seção 2.5:
RCM =
∑imiri∑imi
(13)

2 FUNDAMENTAÇÃO TEÓRICA 20
Onde ri representa um vetor com as coordenadas do i-ésimo átomo da molécula e mi é a
massa deste átomo. Considere, agora, um operador S, que representa uma operação de
simetria contida no grupo pontual da molécula. Ao atuar em um átomo, tem-se:
Sri = r′′i (14)
Onde r′′i representa o vetor com as coordenadas do mesmo átomo após a operação de
simetria. O Centro de Massa é, agora, dado por:
RCM′′ =
∑imir
′′i∑
imi
(15)
Mas como a molécula possui o elemento de simetria S, a seguinte condição deve ser
verdade:
r′′i = rj (16)
Onde rj é o vetor com as coordenadas do j-ésimo átomo da molécula, podendo ser,
inclusive, j = i. Da extensão da de�nição apresentada anteriormente, j e i devem ser
ASE, ou seja, são da mesma espécie isotópica e, portanto, possuem a mesma massa.
Disto, tem-se que:
RCM′′ =
∑jmjrj∑jmj
(17)
Finalmente, temos a igualdade:
RCM = RCM′′ (18)
Que é, de fato, verdadeira, havendo somente uma mudança na ordem das parcelas do
somatório, mas que devem gerar o mesmo resultado.
2.5 Tensor de Inércia
O Tensor de Inércia representa a resistência à rotação de um objeto em cada direção
no espaço, e é de onde obtém-se os Momentos Principais de Inércia. Para obtê-lo, pri-
meiramente calcula-se a posição do Centro de Massa da molécula. Então, adota-se um

2 FUNDAMENTAÇÃO TEÓRICA 21
novo referencial, de modo que o Centro de Massa coincida com a origem de um sistema
de coordenadas, dando origem a um novo sistema que obedece a relação:
ri = r′i −RCM (19)
Com isso, o Tensor de Inércia é dado por (Kroto, 1992):
I =
∑
imi(yi2 + zi
2) −∑
imixiyi −∑
imixizi
−∑
imiyixi∑
imi(xi2 + zi
2) −∑
imiyizi
−∑
imizixi −∑
imiziyi∑
imi(xi2 + yi
2)
(20)
Onde (xi, yi, zi) são as coordenadas cartesianas do i-ésimo átomo, no sistema de co-
ordenadas onde o centro de massa da molécula encontra-se na origem. Os Momentos
Principais de Inércia são obtidos através de uma rotação do tensor, obtendo-se assim uma
matriz do tipo:
R−1IR = IP =
IA 0 0
0 IB 0
0 0 IC
(21)
Onde R é a matriz de rotação e R−1 é sua matriz inversa. Esta rotação é o mesmo que
rotacionar a molécula, de modo que os eixos de inércia coincidam com os eixos cartesianos,
ou seja, a orientação da molécula é ajustada, multiplicando-se suas coordenadas pela
matriz de rotação R. Por convenção, os momentos de inércia são nomeados da seguinte
maneira (Kroto, 1992):
IA ≤ IB ≤ IC (22)
Com o tensor diagonalizado, existem três condições que podem ser exploradas:
−Ixy =∑i
mixiyi = 0
−Ixz =∑i
mixizi = 0
−Iyz =∑i
miyizi = 0 (23)
2 FUNDAMENTAÇÃO TEÓRICA 22
De onde pode-se tirar informações relevantes ao processo de localização das operações de
simetria, discutidos na seção 4, como localização de planos de re�exão e eixos de rotação.
2.6 Tipos de Rotores
Através dos Momentos Principais de Inércia, as moléculas são classi�cadas de acordo
com sua Simetria Rotacional, segundo Wilson, Decius e Cross (1990) e Kroto (1992):
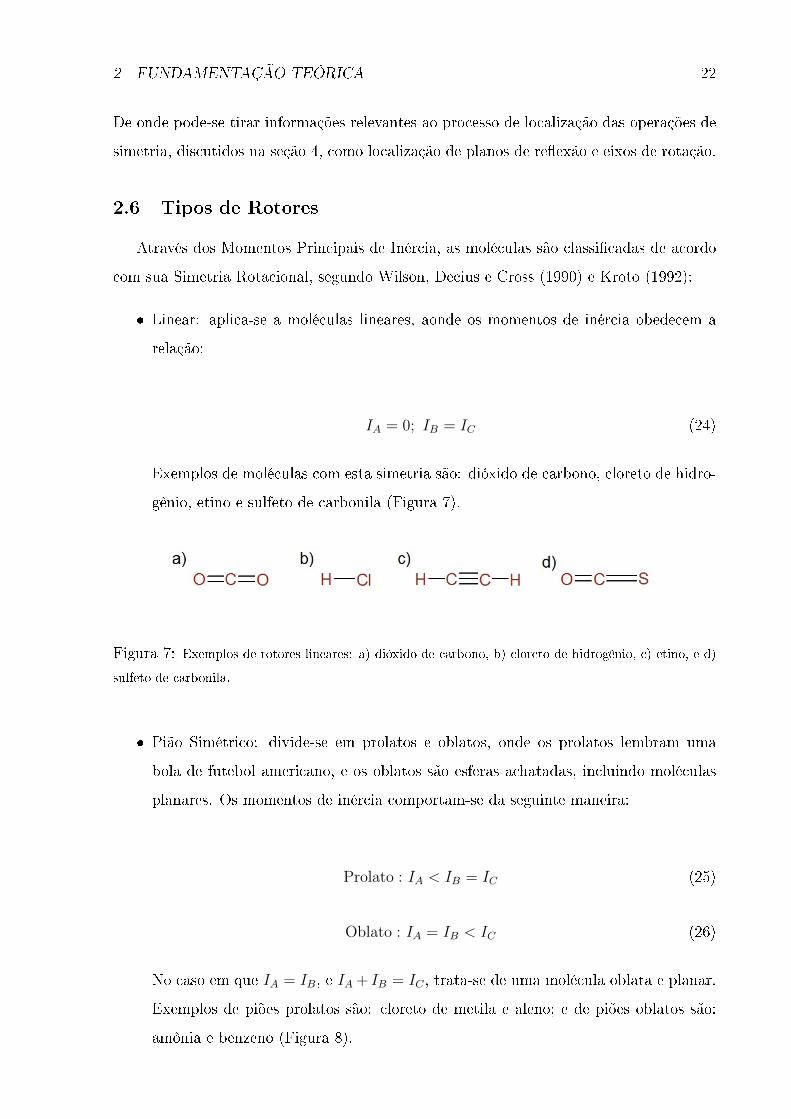
� Linear: aplica-se a moléculas lineares, aonde os momentos de inércia obedecem a
relação:
IA = 0; IB = IC (24)
Exemplos de moléculas com esta simetria são: dióxido de carbono, cloreto de hidro-
gênio, etino e sulfeto de carbonila (Figura 7).
Figura 7: Exemplos de rotores lineares: a) dióxido de carbono, b) cloreto de hidrogênio, c) etino, e d)
sulfeto de carbonila.
� Pião Simétrico: divide-se em prolatos e oblatos, onde os prolatos lembram uma
bola de futebol americano, e os oblatos são esferas achatadas, incluindo moléculas
planares. Os momentos de inércia comportam-se da seguinte maneira:
Prolato : IA < IB = IC (25)
Oblato : IA = IB < IC (26)
No caso em que IA = IB, e IA+ IB = IC , trata-se de uma molécula oblata e planar.
Exemplos de piões prolatos são: cloreto de metila e aleno; e de piões oblatos são:
amônia e benzeno (Figura 8).

2 FUNDAMENTAÇÃO TEÓRICA 23
Figura 8: Exemplos de rotores simétricos: a) cloreto de metila, b) aleno, c) amônia, e d) benzeno.
� Pião Esférico: aplica-se a moléculas com alto grau de simetria, como tetraédricas e
octaédricas, onde os momentos de inércia são iguais. O metano, o hexa�uoreto de
enxofre e o dodecaborato são exemplos de piões esféricos (Figura 9).
Figura 9: Exemplos de rotores esféricos: a) metano, b) hexa�uoreto de enxofre, e c) dodecaborato
(hidrogênios não representados).
� Pião Assimétrico: aplica-se comumente a moléculas grandes, podendo se aproximar
dos outros tipos de rotores, o que é consequência da estrutura semelhante a outro
rotor. Os momentos de inércia são todos diferentes, existindo um caso análogo ao
do pião oblato planar, isto é, se IA + IB = IC , a molécula é planar. Exemplos de
piões assimétricos são: água, anilina, �uoreto de tionila e pirrol (Figura 10).
Figura 10: Exemplos de rotores assimétricos: a) água, b) anilina, c) �uoreto de tionila, e d) pirrol.

2 FUNDAMENTAÇÃO TEÓRICA 24
Através da simetria rotacional de uma molécula, é possível fazer uma pré-classi�cação
em relação ao seu grupo pontual. Por exemplo, um rotor Linear obrigatoriamente per-
tencerá ao grupo pontual C∞v ou D∞h, e um pião simétrico jamais pertencerá ao grupo
pontual C1, isto é, sem simetria alguma. A Tabela 2 apresenta os possíveis grupos pon-
tuais em função do tipo de rotor apresentado por uma molécula, de acordo com Wilson,
Decius e Cross (1990).
Tabela 2: Grupos Pontuais em função da Simetria Rotacional
Simetria Rotacional Grupos Pontuais
Linear C∞v, D∞h
Pião Simétrico Cn, Cnh, Cnv, Dn, Dnh, Dnd, Sn
Pião Esférico Td, Th, Oh, Ih, Kh
Pião Assimétrico C1, Cs, Ci, Cn, Cnh, Cnv, Dn, Dnh, Dnd, Sn

3 ALGORITMOS PARA ALOCAÇÃO DOS GRUPOS PONTUAIS 25
3 ALGORITMOS PARA ALOCAÇÃO DOS
GRUPOS PONTUAIS
Baseando-se na Simetria Rotacional da molécula, conforme descrito na seção 2.6, a
alocação do grupo pontual da molécula modi�ca-se, restringindo as possibilidades de
acordo com o tipo de rotor (Tabela 2). Além disso, analisando as operações de simetria
contidas em cada grupo pontual (Tabela 1), é possível criar um algoritmo que necessite
de um número mínimo de operações para identi�car o grupo pontual da molécula. Tais
algoritmos, apresentados a seguir, são baseados nestas análises.
3.1 Rotores Lineares
Conforme visto na seção 2.6, os rotores lineares são facilmente identi�cáveis através
de seus momentos principais de inércia. Portanto, após a diagonalização do Tensor de
Inércia, se IA = 0, a molécula pode pertencer somente a dois grupos, de acordo com
a Tabela 2. Ao analisar os possíveis grupos pontuais na Tabela 1, observa-se que uma
operação limitante é i. Logo, se não existir um centro de inversão na molécula, ela pertence
ao grupo pontual C∞v, e caso exista, pertence ao grupo pontual D∞h.
3.2 Rotores Esféricos
Assim como os rotores lineares, um rotor esférico é facilmente identi�cável através
de seus momentos principais de inércia, conforme mencionado na seção 2.5. Após uma
estrutura ser reconhecida como um pião esférico, será avaliada o número de vértices, isto
é, átomos, da �gura geométrica formada pelos conjuntos de ASE da molécula. Como
os possíveis grupos pontuais associados a piões esféricos (Tabela 2) estão relacionados a
�guras geométricas bem de�nidas, é possível distingui-los da seguinte maneira:
Se k = 1, Grupo Pontual: Kh;
Se k4= 1 ou k
4= 3, Grupo Pontual: Td;
Se k6ou k
8= 1, k
6= 4 ou k
8= 3, Grupo Pontual: Oh;
Se k12
ou k20
= 1, k12
= 5 ou k20
= 3, Grupo Pontual: Ih ou Th.
Onde k é o número de átomos presentes em um dado conjunto de ASE. As duas possibi-
lidades quanto ao valor da divisão de k, seja por 4, 6, 8, 12 ou 20, refere-se a existência

3 ALGORITMOS PARA ALOCAÇÃO DOS GRUPOS PONTUAIS 26
de uma forma geométrica truncada, ou seja, tendo seus vértices cortados por um plano,
gerando novos vértices, mas mantendo a condição de um rotor esférico. Um exemplo de
uma molécula que apresenta esta con�guração é o tetrametilsilano (Figura 11a), onde os
carbonos, com k = 4, formam um tetraedro convencional, e os hidrogênios, com k = 12,
formam um tetraedro truncado, semelhante ao da Figura 11b.
Figura 11: a) Molécula de Tetrametilsilano, b) Tetraedro Truncado
Como consequência deste método para identi�cação do grupo pontual, dois casos po-
dem se sobrepor: o grupo pontual Td com Ih ou Th, e a própria distinção entre Ih e Th.
Para o primeiro caso, sabe-se que uma molécula do grupo pontual Td não possui a ope-
ração de inversão (Tabela 1), portanto, em uma eventual sobreposição das condições, a
operação de inversão será determinante na decisão do grupo pontual.
Para o segundo caso, entre a simetria icosaédrica e piritoédrica, o que torna possível
a distinção entre as duas é o fato de que uma molécula de simetria Th não possui um eixo
C5, e uma de simetria Ih possui (Tabela 1). Portanto, analisando a matriz de distâncias da
molécula, é possível veri�car que existem cinco valores de distâncias iguais para o grupo
pontual Ih, mas isso não é verdade para o grupo pontual Th.
Para que o grupo pontual seja alocado, todos os conjuntos de ASE devem concordar
quanto ao resultado, caso contrário, o grupo pontual a ser alocado será o de menor sime-
tria entre os possíveis grupos esféricos para uma dada molécula. Por exemplo, caso um
conjunto de ASE seja alocado como pertencente ao grupo pontual Oh e outro seja alocado
ao grupo pontual Th, a molécula será alocada como pertencente ao grupo pontual Th.
3.3 Rotores Simétricos
Devido às possibilidades quanto a um pião simétrico, um algoritmo um pouco mais
elaborado se faz necessário para identi�car o grupo pontual. A Figura 12 apresenta o

3 ALGORITMOS PARA ALOCAÇÃO DOS GRUPOS PONTUAIS 27
�uxograma a ser seguido. Inicialmente, determina-se a ordem do eixo de rotação principal,
Cn, através da análise dos momentos de inércia dos conjuntos de ASE. Em seguida,
veri�ca-se a existência de um eixo C⊥2 : caso exista, a molécula pertence a um dos grupos
diedrais D. Caso contrário, deve-se veri�car a existência de um eixo S2n colinear com o
eixo Cn: se existir, a molécula pertence ao grupo pontual S2n, caso contrário, pertencerá
a um dos grupos cíclicos C.
Figura 12: Algoritmo para identi�cação do Grupo Pontual de um Rotor Simétrico.
Para os grupos diedrais, veri�ca-se primeiramente a existência de um eixo S2n colinear
ao eixo Cn: caso exista, a molécula pertence ao grupo pontual Dnd. Caso contrário,
procura-se por um eixo Sn, também colinear ao eixo Cn: se existir, a molécula pertence
ao grupo pontual Dnh. Caso não exista a operação de rotação imprópria na molécula, ela
pertencerá ao grupo pontual Dn.
Para os grupos cíclicos, veri�ca-se primeiramente a existência de um eixo Sn colinear
ao eixo Cn: se existir, a molécula pertence ao grupo pontual Cnh. Caso não exista,
procura-se por um plano σv: caso exista, a molécula pertence ao grupo pontual Cnv; caso

3 ALGORITMOS PARA ALOCAÇÃO DOS GRUPOS PONTUAIS 28
contrário, pertence ao grupo pontual Cn.
3.4 Rotores Assimétricos
Figura 13: Algoritmo para identi�cação do Grupo Pontual de um Rotor Assimétrico.
Sendo o menos restrito dos tipos de rotores, um pião assimétrico abrange todas as
etapas de um pião simétrico, além da possibilidade de não possuir um eixo Cn de ordem
n > 1. Portanto, ao se localizar um pião assimétrico, procura-se por um eixo Cn. Se
existir, o algoritmo progride da mesma maneira que os rotores simétricos. Caso contrário,
veri�ca-se a existência de um plano σ: se existir, a molécula pertence ao grupo pontual
Cs. Caso contrário, procura-se por um um centro de inversão: caso a molécula possua
um, ela pertence ao grupo pontual Ci; caso contrário, pertencerá ao grupo pontual C1.

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 29
4 IDENTIFICAÇÃO DAS OPERAÇÕES DE
SIMETRIA
Após a reorientação da molécula de modo a diagonalizar o Tensor de Inércia, os prin-
cipais elementos de simetria de uma molécula estarão alinhados com os eixos e planos
cartesianos. Por exemplo, em uma molécula do grupo pontual Cs, o plano σ se encon-
trará alinhado a um dos planos cartesianos; e em uma molécula pertencente ao grupo
pontual Cnv, o eixo de rotação estará alinhado a um dos eixos cartesianos. Estas propri-
edades podem ser utilizadas de modo a facilitar a localização de elementos de simetria, e
serão exploradas nos métodos descritos a seguir.
4.1 Eixo de Rotação Própria: Cn
Para encontrar o eixo de rotação própria de maior ordem de uma molécula, deve-se
analisar os conjuntos de átomos simetricamente equivalentes (ASE). Utilizando os mo-
mentos de inércia de um conjunto, pode-se veri�car a existência e a ordem de um eixo Cn
para este conjunto de átomos simetricamente equivalentes. Existem quatro possibilidades
quanto ao arranjo de um conjunto de k ASE, classi�cados de acordo com seus momentos
de inércia, sendo calculados em um sistema de coordenadas onde o centro de massa do
conjunto de ASE se encontre na origem.
4.1.1 Arranjo Pontual
Será de�nido como um arranjo pontual quando k = 1 e os momentos de inércia forem,
consequentemente, todos iguais a zero, classi�cado como um rotor esférico:
IASEA = IASEB = IASEC = 0 (27)
Este caso é idêntico ao grupo pontual Kh, possuindo in�nitos eixos de rotação.
4.1.2 Arranjo Linear
Neste caso k = 2 e os momentos de inércia são como os de um rotor linear:
IASEA = 0; IASEB = IASEC (28)

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 30
Este caso apresenta in�nitos eixos C2 perpendiculares ao eixo do conjunto de átomos,
além de um C∞ neste eixo. Como exemplo, pode-se utilizar a molécula de CO2, da Figura
14a, onde os oxigênios pertencem a um conjunto de ASE deste caso.
4.1.3 Polígono
De�ne-se este caso como um conjunto de k ASE arranjados de tal forma que repre-
sentem um polígono de k lados, e momentos de inércia de um rotor planar. Este caso
divide-se, portanto, em dois tipos:
� Regular
Um polígono será de�nido como regular quando o conjunto de k ASE apresentar os
momentos de inércia de um rotor oblato e planar:
IASEA + IASEB = IASEC , com IASEA = IASEB (29)
Um exemplo para o caso de um rotor oblato e planar encontra-se na Figura 14b,
onde os 3 carbonos do ciclopropano formam um conjunto de ASE que representa
um polígono de 3 lados.
� Irregular
Por outro lado, quando o polígono apresentar os momentos de inércia de um rotor
assimétrico e planar, este será de�nido como irregular:
IASEA + IASEB = IASEC , com IASEA 6= IASEB (30)
Para um rotor assimétrico e planar, toma-se como exemplo o aleno em uma con-
formação eclipsada, na Figura 15, onde os hidrogênios delimitam um polígono de 4
lados.
Para o primeiro caso, o conjunto pode apresentar como eixo de maior ordem um eixo
Ck, ou um eixo de ordem igual aos divisores de k, e para o segundo caso, somente os
divisores de k são considerados. Observa-se, nos exemplos dados, que o ciclopropano da

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 31
Figura 14: Moléculas contendo conjuntos de ASE dos casos a) Linear: Dióxido de Carbono; e b)
Polígono oblato planar: Ciclopropano, com k = 3, neste caso.
Figura 14b possui um eixo Ck, com k = 3, e o aleno eclipsado da Figura 15 possui um eixo
C2, apesar de k = 4. Seja qual for a ordem do eixo de rotação, este passará pelo centro de
massa e será perpendicular ao plano do polígono. Para exempli�car o caso dos polígonos
regulares serão usados os carbonos do ciclopropano, da Figura 14b. Como existe um eixo
C3, as coordenadas dos carbonos podem ser obtidas a partir da aplicação da operação
sobre um deles. Considerando as coordenadas de um dos carbonos como dadas no vetor
XC1 = (x,y, z), e o eixo C3 localizado sobre o eixo z, tem-se:
C3XC1 =
cos 2π
3sin 2π
30
− sin 2π3
cos 2π3
0
0 0 1
x
y
z
=
cos 2π
3x+ sin 2π
3y
− sin 2π3x+ cos 2π
3y
z
= XC2 (31)
Da mesma maneira, aplicando-se a operação C23 em XC1 tem-se o vetor das coordenadas
do terceiro carbono, XC3 :
XC3 =
cos 4π
3x+ sin 4π
3y
− sin 4π3x+ cos 4π
3y
z
(32)
Com isso, as equações 23 �cam:
−Ixy = mC
{xy +
[(−x+ y
√3
2
)(−x√3− y2
)]+
[(−x− y
√3
2
)(x√3− y2
)]}= 0
−Ixz = mC
{z
[x+
(−x+ y
√3
2
)+
(−x− y
√3
2
)]}= 0
−Iyz = mC
{z
[y +
(−x√3− y2
)+
(x√3− y2
)]}= 0 (33)

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 32
Figura 15: Molécula contendo um conjunto de ASE do caso Polígono assimétrico planar: Aleno, com
k = 4, neste caso.
O que mostra que o eixo C3 encontra-se perpendicular ao plano xy, atendendo as
condições do tensor de inércia diagonalizado.
4.1.4 Prisma
Trata-se de um conjunto de ASE arranjados de tal maneira a delimitar um sólido
correspondente a translação de um polígono na direção perpendicular ao seu plano. Um
conjunto de ASE que se enquadre neste caso deve apresentar valores de k pares, de modo
que cada face poligonal do prisma possua k/2 vértices. Assim como no caso dos polígonos,
existem duas possibilidades:
� Regular
O conjunto de ASE será denominado um prisma regular quando este apresentar
momentos de inércia como os de um rotor simétrico prolato:
IASEA < IASEB = IASEC (34)
Duas possibilidades para prismas regulares encontram-se na Figura 16, que são
rotâmeros do ferroceno. Nestes casos, tanto os carbonos como os hidrogênios, não
representados, formam conjuntos de ASE correspondentes a prismas regulares.
� Irregular
Um prisma irregular será aquele que apresentar momentos de inércia como os de
um rotor assimétrico:

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 33
Figura 16: Moléculas contendo conjuntos de ASE do caso Prisma prolato: a) Ferroceno eclipsado, um
prisma; e b) Ferroceno anti, um antiprisma; ambos com k = 10 e hidrogênios não representados.
Figura 17: Molécula contendo um conjunto de ASE do caso Prisma Irregular, com k = 8
IASEA 6= IASEB 6= IASEC (35)
A Figura 17 apresenta um caso hipotético, de um conjunto de ASE que pertence
a categoria de prisma irregular. Trata-se de um caso provavelmente raro, com
condições de existência muito restritas.
Assim como os polígonos, os prismas regulares podem apresentar como eixo de maior
ordem um eixo Ck/2, que seria um eixo de ordem igual ao número de lados do polígono
formador do prisma. Analogamente, tanto para os prismas regulares como irregulares, a
ordem do eixo de rotação pode ser igual a um dos divisores de k/2. Para os exemplos
dados, ambos os rotâmeros do ferroceno apresentados na Figura 16 apresentam um eixo
C5 como eixo de maior ordem, seja para o conjunto de carbonos ou para o conjunto de
hidrogênios; e o caso hipotético da Figura 17 apresenta um eixo C2 como eixo de maior

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 34
ordem. Independente do caso, o eixo de maior ordem será perpendicular ao plano dos
polígonos, ao longo da translação, e passará pelo centro de massa do conjunto, fato que
pode ser demonstrado por uma simples extensão do exemplo apresentado anteriormente
para o caso dos polígonos.
4.1.5 Con�rmação do Eixo de Maior Ordem
Tendo-se delimitado as possíveis ordens dos eixos de rotação de cada conjunto de ASE
da molécula, estes devem ser veri�cados, a começar pelo de maior ordem. Nos casos
Pontual e Linear, a veri�cação é desnecessária, pois são certamente identi�cados pelos
momentos de inércia.
No caso dos polígonos e prismas, a veri�cação é feita através da operação de rotação de
ordem apropriada, aplicada ao redor do eixo cartesiano que contém o eixo Cn. A escolha
do eixo será realizada observando-se os momentos principais de inércia: para polígonos, o
eixo escolhido será aquele que apresentar maior valor, isto é, IASEC ; e para prismas, o eixo
será o que apresentar menor valor, isto é, IASEA . De maneira semelhante ao apresentado na
seção 4.1.3, considere um conjunto de k ASE que possui uma simetria rotacional do tipo
pião simétrico oblato, não necessariamente planar, mas que possui um eixo Cn alinhado
ao eixo z. Da equação 20, tem-se que os componentes da diagonal principal do tensor de
inércia são:
IASExx = m[(y21 + z21) + (y22 + z22) + . . .+ (y2k + z2k)]
IASEyy = m[(x21 + z21) + (x22 + z22) + . . .+ (x2k + z2k)]
IASEzz = m[(x21 + y21) + (x22 + y22) + . . .+ (x2k + y2k)] (36)
Como se trata de um pião simétrico oblato, os valores para as coordenadas cartesianas
em x e y devem ser maiores que em z, resultando em um valor maior para a inércia ao
redor do eixo z, ou seja, IASEzz = IASEC , que é o mesmo aonde encontra-se o eixo Cn do
conjunto. A partir disto, �ca claro que, em um prisma, que se comporta como um, ou
próximo de um, pião simétrico prolato, o eixo de menor inércia, IASEA , será o próprio eixo
cartesiano alinhado ao eixo Cn do conjunto.
Na molécula como um todo, o eixo de maior ordem que satisfazer as condições da
operação de rotação própria será o de maior ordem da molécula. Assim como no caso dos

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 35
conjuntos de ASE, o eixo cartesiano apropriado para a aplicação da rotação será escolhido
baseando-se na análise do tensor de inércia, conforme mostrado acima. Entretanto, para
rotores assimétricos, este método se mostra ine�caz, portanto, a escolha do eixo cartesiano
para aplicar a rotação será feita através do conceito apresentado na seção 2.4: se o centro
de massa é invariante aos elementos de simetria presentes em uma molécula, o centro de
massa de cada conjunto de ASE também o será. Com estes pontos é possível identi�car
o eixo cartesianos aonde se encontra o eixo de rotação de maior ordem da molécula.
Como exemplos de todo o procedimento, serão utilizados moléculas previamente des-
critas, onde os conjuntos de ASE já foram identi�cados.
Água
Inicialmente considera-se a água, Figura 18, onde se tem dois conjuntos de ASE: o
oxigênio e os dois hidrogênios. O oxigênio, isoladamente, possui in�nitos eixos, por se
encaixar no arranjo pontual. Quanto aos hidrogênios, estes se encaixam no arranjo linear,
portanto apresentam in�nitos eixos C2 e um eixo C∞. Os eixos C∞ podem ser descartados
imediatamente, pelo fato de que a molécula não é um rotor linear e possui mais de um
átomo. Sobram, então, os eixos C2, que serão testados aplicando-se a operação direta-
mente na molécula. Para determinar o eixo aonde será aplicada a rotação e, portanto, o
único eixo C2 possível, veri�ca-se os centros de massa da molécula e de cada conjunto de
ASE, pois a água é um pião assimétrico: para o oxigênio, encontra-se no próprio átomo;
para os hidrogênios, encontra-se entre os dois átomos; e para a molécula como um todo,
um pouco abaixo do átomo de oxigênio e equidistante aos hidrogênios (Figura 18a). Por-
tanto, o eixo C2 da molécula deve estar conforme visto na Figura 18b, cruzando os três
pontos descritos. Ao aplicar-se a operação C2, con�rma-se que a água possui de fato este
elemento de simetria.
Benzeno
Como próximo exemplo tem-se o benzeno, Figura 19, onde os seis carbonos formam
um conjunto de ASE, e os seis hidrogênios formam outro. Fica evidente que ambos os
conjuntos delimitam um polígono de k = 6, portanto ambos podem possuir um eixo C6
como eixo de maior ordem, perpendicular ao plano da molécula, por se tratar de um pião
simétrico oblato e planar, que passa pelo centros de massa dos conjuntos e da molécula,

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 36
Figura 18: Moléculas de água, evidenciando a) o Centro de Massa da molécula, e b) o Eixo C2 da
molécula.
Figura 19: Moléculas de benzeno, evidenciando a) o Centro de Massa da molécula, e b) o Eixo C6 da
molécula.
que, neste caso, são todos o mesmo ponto. Aplicando-se uma rotação de ordem 6, veri�ca-
se que as condições de simetria são satisfeitas, portanto, conclui-se que o benzeno possui
como eixo de maior ordem um C6, conforme mostra a Figura 19b.
p-Dinitrobenzeno
No último exemplo, tem-se o p-dinitrobenzeno, Figura 20, onde há cinco conjuntos de
ASE: i) os quatro hidrogênios, ii) os dois carbonos ligados aos grupos nitro, iii) os quatro
demais carbonos, iv) os dois nitrogênios, e v) os quatro oxigênios. Os cinco conjuntos
dividem-se em dois casos apresentados anteriormente: dois lineares e três polígonos de
k = 4 vértices. Os lineares, os dois carbonos ligados aos grupos nitro e os dois nitro-
gênios, apresentam a mesma possibilidade: os in�nitos eixos C2 de um rotor linear. Os
polígonos, demais conjuntos, apresentam a mesma con�guração: possuem k = 4 e por-
tanto a possibilidade de um C4 como eixo de maior ordem, perpendicular ao plano dos
conjuntos e da molécula. Aplicando-se a operação de rotação veri�ca-se que a molécula

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 37
Figura 20: Moléculas de p-dinitrobenzeno, evidenciando a) o Centro de Massa da molécula, e b) o Eixo
C2 da molécula.
não possui um eixo C4, portanto deve-se testar a outra possibilidade, que são os eixos C2
dos conjuntos lineares e que condizem com o polígono de k = 4. Novamente, o eixo a ser
considerado é o eixo perpendicular ao plano molecular, pela fato de que a molécula é um
rotor simétrico oblato e planar. Aplicando-se a operação C2, conclui-se que a molécula
possui este elemento de simetria, conforme mostra a Figura 20b.
4.2 Eixos C2 Perpendiculares: C⊥2
Para a localização de eixos C2 perpendiculares ao eixo Cn de maior ordem, serão
utilizados duas condições: I) para que exista um eixo C⊥2 o centro de massa de cada
conjunto de ASE deve estar localizado no mesmo ponto que o centro de massa da molécula,
isto é, na origem, de modo a não violar a condição de um grupo pontual; e II) um eixo
C⊥2 deve existir tanto para a molécula como um todo como para cada conjunto de ASE
que a compõem, facilitando a localização de possíveis eixos C⊥2 .
A primeira condição é facilmente testada, calculando-se o centro de massa de cada
conjunto de ASE, como descrito na seção 2.5, e veri�cando a posição destes. A segunda
condição é testada explorando o fato de que cada conjunto de ASE adota uma forma
geométrica que apresenta eixos C⊥2 facilmente localizáveis, onde a operação é aplicada e
veri�ca-se a existência, ou não, do eixo. Para tal, escolhe-se um conjunto de ASE e é
selecionado um átomo qualquer deste conjunto, em particular seu vetor posição. Calcula-
se, então, o vetor posição do ponto médio entre este átomo e outro átomo qualquer
pertencente ao mesmo conjunto de ASE. Este vetor será utilizado para a aplicação de
uma operação C2, utilizando-se da seguinte matriz de rotação (Zwillinger, 2002):

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 38
R =
x2(1− cos θ) + cos θ xy(1− cos θ)− z sin θ xz(1− cos θ) + y sin θ
xy(1− cos θ) + z sin θ y2(1− cos θ) + cos θ yz(1− cos θ)− x sin θ
xz(1− cos θ)− y sin θ yx(1− cos θ) + x sin θ z2(1− cos θ) + cos θ
(37)
Onde x, y e z são as coordenadas do versor do vetor ao redor do qual fora realizada a
operação C2, e θ é o ângulo de rotação, que neste caso deve ser igual a 180◦. Caso a
operação satisfaça os critérios de uma operação de simetria, a molécula possui eixos C⊥2 ,
caso contrário, o vetor do ponto médio entre o átomo escolhido e um novo átomo do
conjunto será testado.
Porém, como procura-se por um eixo perpendicular ao eixo principal de rotação, duas
condições devem ser observadas: o ponto médio não pode situar-se na origem, e o vetor
posição do ponto médio deve ser perpendicular ao eixo cartesiano que contém o eixo
principal de rotação. Caso nenhum dos eixos considerados atenda as condições de simetria,
a molécula não possui eixos C⊥2 .
Dois pontos que devem ser notados são as possibilidades de conjuntos de ASE com 1
ou 2 átomos. Nestes casos, um novo conjunto será escolhido para o teste, entretanto, para
uma molécula que possua apenas conjuntos de ASE com 2 átomos, os eixos veri�cados
serão os dois eixos cartesianos perpendiculares ao eixo aonde encontra-se o eixo principal
de rotação, pois todo ponto médio situaria-se na origem do sistema.
Para facilitar o entendimento, considere novamente a molécula de benzeno, na Figura
21a. Conforme mostrado anteriormente, o benzeno possui um eixo C6 perpendicular ao
plano da molécula, logo, se possuir eixos C⊥2 , estes se encontrarão neste plano. Inicial-
mente, escolhe-se um conjunto de ASE qualquer, por exemplo, o dos hidrogênios, e, então,
dois átomos quaisquer deste conjunto. Caso dois hidrogênios em posições opostas sejam
escolhidos, por exemplo os hidrogênios 1 e 4, é evidente que o ponto médio entre estes
átomos encontra-se no centro de massa da molécula, ou seja, na origem, o que inutiliza
este ponto. Escolhe-se, então, os hidrogênios 1 e 5, por exemplo. O ponto médio entre
este átomos encontra-se quase que sobre o carbono 6, como mostra a Figura 21b, não
situando-se sobre a origem e seu vetor posição é perpendicular ao eixo C6. Aplicando-se a
rotação C2 ao redor do eixo representado por este vetor, tem-se a molécula representada
na Figura 21c, ou seja, exatamente como na Figura 21a, desconsiderando-se a numeração

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 39
dos átomos, logo, este eixo C⊥2 atende as condições de simetria e, consequentemente, a
molécula de benzeno apresenta eixos C⊥2 .
Figura 21: Molécula de Benzeno, evidenciando: a) as posições dos átomos e o centro de massa da
molécula, b) o vetor posição do ponto médio entre os hidrogênios 1 e 5, e c) a con�rmação da existência
do eixo C⊥2 .
4.3 Eixos de Rotação Imprópria: S2n e Sn
Para todos os casos em que a operação de rotação imprópria for necessária, o eixo
S2n ou Sn será colinear ao eixo Cn da molécula, se existir. Portanto, para localizar este
elemento de simetria, basta aplicar a operação de ordem apropriada no mesmo eixo que
contém o eixo Cn da molécula. Por exemplo, no caso do benzeno, da Figura 19, a existência
de um eixo Sn será veri�cada no mesmo eixo em que existe o eixo C6 da molécula, isto é,
passando pelo centro de massa e perpendicular ao plano da molécula.
4.4 Planos de Re�exão: σ e σv
A identi�cação de planos de re�exão será realizada somente em duas circunstâncias
durante todo o procedimento, conforme visto na seção anterior: para diferenciar entre
os grupos Cnv e Cn, e para localizar o grupo pontual Cs. Para o primeiro caso, já é
conhecido um eixo que, se o plano existir, deve estar contido neste plano, como o eixo
C2 da molécula de água da Figura 22a, portanto é possível escolher um vetor que esteja
no plano. Escolhe-se, então, um vetor posição de qualquer átomo que não encontre-se
no eixo de rotação, como na Figura 22b, e, através de um produto vetorial entre estes
dois vetores, tem-se um vetor diretor de um plano que passa pela origem e que contém o

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 40
eixo de rotação de maior ordem da molécula. Usando o versor do vetor diretor do plano,
obtém-se a matriz da operação de re�exão através deste plano (Zwillinger, 2002):
σv =
1− 2x2 −2xy −2xz
−2xy 1− 2y2 −2yz
−2xz −2yz 1− 2z2
(38)
Onde x, y, e z são os componentes do versor do vetor diretor do plano. Aplica-se, então,
a re�exão ao redor do plano obtido e veri�ca-se se a molécula possui este elemento de
simetria. Caso possua, a molécula pertence ao grupo pontual Cnv, como é o caso da água
na Figura 22c. Caso contrário, a molécula não possui planos de re�exão e pertence ao
grupo pontual Cn.
Figura 22: Molécula de Água, evidenciando: a) o centro de massa e o eixo C2 da molécula, b) o vetor
posição do hidrogênio escolhido, e c) o plano σv gerado pelos vetores escolhidos.
Para moléculas que não possuam outros elementos de simetria além de σ, como é o caso
das moléculas pertencentes ao grupo pontual Cs (Figura 23a), a localização do elemento de
simetria assemelha-se ao procedimento descrito para localizar o eixo cartesiano que contém
o eixo Cn para rotores assimétricos: quando existir, os centros de massa dos conjuntos
de ASE e da própria molécula serão pontos coplanares contidos no plano cartesiano onde
a operação de re�exão deve ser aplicada para con�rmar a existência do elemento de
simetria, como na Figura 23b. Isto pode ser exempli�cado de maneira análoga ao mostrado
anteriormente para o eixo principal de rotação.
4.5 Inversão: i
Para a inversão, por se tratar de uma operação extremamente simples, basta aplicá-la
na molécula e veri�car se as condições de simetria são satisfeitas. Isto será feito somente

4 IDENTIFICAÇÃO DAS OPERAÇÕES DE SIMETRIA 41
Figura 23: Molécula pertencente ao grupo pontual Cs a) Fluoreto de Tionila, e b) plano de re�exão σ
da molécula.
no referencial onde o centro de massa esteja na origem, de modo que este seja invariante
à operação, conforme que foi descrito na seção 2.4.

5 EXEMPLOS 42
5 EXEMPLOS
5.1 Amônia
Para demonstrar todo o procedimento para alocação do grupo pontual de uma molé-
cula, o algoritmo será aplicado a duas moléculas utilizando valores numéricos, ao contrário
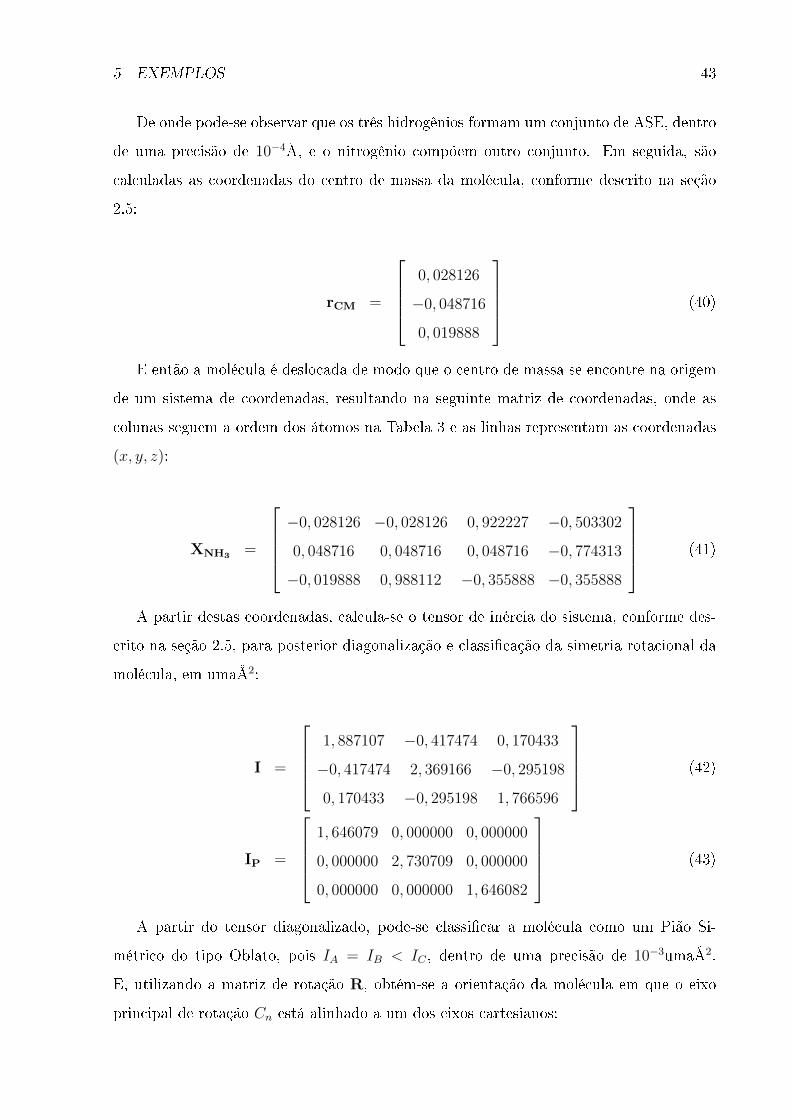
do que foi mostrado até agora. Como primeiro exemplo, considere a molécula de amônia,
representada na Figura 24, constituída pelo isótopos mais abundantes de cada elemento, o1H e o 14N. As informações relevantes ao procedimento encontram-se na Tabela 3 abaixo:
Figura 24: Molécula de Amônia
Tabela 3: Informações referentes à molécula de amônia
# Símbolo Massa atômica (uma) Coordenadas cartesianas (x;y;z)(Å)
1 N 14, 003074 (0, 000000; 0, 000000; 0, 000000)
2 H 1, 007825 (0, 000000; 0, 000000; 1, 008000)
3 H 1, 007825 (0, 950353; 0, 000000;−0, 336000)
4 H 1, 007825 (−0, 475176;−0, 823029;−0, 336000)
A partir destes dados, calcula-se a matriz de distâncias interatômicas, conforme des-
crito na seção 2.3, em Å:
DNH3 =
N H1 H2 H3
0, 000000 1, 008000 1, 008001 1, 008000 N
1, 008000 0, 000000 1, 646058 1, 646057 H1
1, 008001 1, 646058 0, 000000 1, 646059 H2
1, 008000 1, 646057 1, 646059 0, 000000 H3
(39)
5 EXEMPLOS 43
De onde pode-se observar que os três hidrogênios formam um conjunto de ASE, dentro
de uma precisão de 10−4Å, e o nitrogênio compõem outro conjunto. Em seguida, são
calculadas as coordenadas do centro de massa da molécula, conforme descrito na seção
2.5:
rCM =
0, 028126
−0, 048716
0, 019888
(40)
E então a molécula é deslocada de modo que o centro de massa se encontre na origem
de um sistema de coordenadas, resultando na seguinte matriz de coordenadas, onde as
colunas seguem a ordem dos átomos na Tabela 3 e as linhas representam as coordenadas
(x, y, z):
XNH3 =
−0, 028126 −0, 028126 0, 922227 −0, 503302
0, 048716 0, 048716 0, 048716 −0, 774313
−0, 019888 0, 988112 −0, 355888 −0, 355888
(41)
A partir destas coordenadas, calcula-se o tensor de inércia do sistema, conforme des-
crito na seção 2.5, para posterior diagonalização e classi�cação da simetria rotacional da
molécula, em umaÅ2:
I =
1, 887107 −0, 417474 0, 170433
−0, 417474 2, 369166 −0, 295198
0, 170433 −0, 295198 1, 766596
(42)
IP =
1, 646079 0, 000000 0, 000000
0, 000000 2, 730709 0, 000000
0, 000000 0, 000000 1, 646082
(43)
A partir do tensor diagonalizado, pode-se classi�car a molécula como um Pião Si-
métrico do tipo Oblato, pois IA = IB < IC , dentro de uma precisão de 10−3umaÅ2.
E, utilizando a matriz de rotação R, obtém-se a orientação da molécula em que o eixo
principal de rotação Cn está alinhado a um dos eixos cartesianos:

5 EXEMPLOS 44
X′NH3=
0, 000000 −0, 190485 0, 901571 −0, 711084
0, 059665 −0, 276336 −0, 276335 −0, 276336
0, 000000 0, 931066 −0, 300568 −0, 630498
(44)
Como se trata de rotor simétrico, o procedimento agora será de acordo com o descrito
na Figura 12. Portanto, deve-se localizar a ordem do eixo principal de rotação. Para tal,
é feita a análise da simetria rotacional de cada conjunto de ASE: o primeiro conjunto
contém três hidrogênios e o seguinte tensor de inércia, já diagonalizado:
IASEH =
1, 365353 0, 000000 0, 000000
0, 000000 2, 730709 0, 000000
0, 000000 0, 000000 1, 365356
(45)
De onde pode-se classi�car este conjunto de ASE como um Pião Simétrico Oblato e
Planar, pois além de IA = IB < IC , IA+ IB = IC , dentro de uma precisão de 10−3umaÅ2,
e, portanto, um polígono regular, onde k = 3. O conjunto possui, portanto, um eixo de
rotação C3 no eixo y, pois o elemento IASEyy do tensor de inércia possui o maior valor, ou
seja, IASEyy = IASEC . Para o segundo conjunto, que contém o nitrogênio, é evidente que
este se encaixa no caso do arranjo pontual, pois k = 1 neste caso.
Para veri�car a presença do eixo C3, a operação será aplicada na molécula como um
todo. Como a amônia é um pião oblato, o eixo principal de rotação deve estar alinhado ao
eixo que possui maior valor no tensor de inércia, este sendo o eixo y neste caso. Aplicando
a rotação:
C3X′NH3
=
cos 2π
30 sin 2π
3
0 0 1
− sin 2π3
0 cos 2π3
0, 000000 −0, 190485 0, 901571 −0, 711084
0, 059665 −0, 276336 −0, 276335 −0, 276336
0, 000000 0, 931066 −0, 300568 −0, 630498
=
0, 000000 −0, 711084 −0, 190486 0, 901569
0, 059665 −0, 276336 −0, 276335 −0, 276336
−0, 000000 −0, 630498 0, 931067 −0, 300568
(46)
Comparando esta matriz de coordenadas com a matriz X′NH3, pode-se observar que,
dentro de uma precisão de 10−4Å, a molécula de amônia de fato possui um eixo C3

5 EXEMPLOS 45
paralelo ao eixo y, pois nota-se que o hidrogênio #1 agora ocupa a posição do hidrogênio
#3, o hidrogênio #2 ocupa a posição do hidrogênio #1, o hidrogênio #3 ocupa a posição
do hidrogênio #2 e o nitrogênio não mudou de posição. O próximo passo é procurar por
eixos C⊥2 : o centro de massa do conjunto que contém o nitrogênio é simplesmente a sua
posição no espaço, e a do conjunto dos hidrogênios já fora calculado é:
rHCM =
0, 000000
−0, 276335
0, 000000
rNCM =
0, 000000
0, 059665
0, 000000
(47)
De onde observa-se que a molécula de amônia não possui eixos C⊥2 , pois os centros de
massa dos conjuntos de ASE que a compõem não encontram-se na origem do sistema de
coordenadas. Portanto, sabe-se que as molécula de amônia pertence aos grupos Cíclicos.
Seguindo o algoritmo, o próximo passo é veri�car se a molécula possui um eixo S6 colinear
ao eixo C3, ou seja, paralelo ao eixo y. Trata-se, portanto, de uma rotação C6 em torno
do eixo y e re�exão através do plano xz:
S6X′NH3
=
cos 2π
6 0 sin 2π6
0 −1 0
− sin 2π6 0 cos 2π
6
0, 000000 −0, 190485 0, 901571 −0, 711084
0, 059665 −0, 276336 −0, 276335 −0, 276336
0, 000000 0, 931066 −0, 300568 −0, 630498
=
0, 000000 −0, 901569 0, 711085 0, 190485
−0, 059665 0, 276336 0, 276335 0, 276336
0, 000000 0, 300568 0, 630499 −0, 931066
(48)
Comparando-se as matrizes de coordenadas, nota-se que o nitrogênio encontra-se fora de
sua posição, portanto conclui-se que a molécula de amônia não possui um eixo S6, logo
não pertence ao grupo pontual S6. Seguindo o algoritmo, o próximo passo é veri�car a
existência de um eixo S3 paralelo ao eixo C3. De maneira semelhante, aplica-se a operação:

5 EXEMPLOS 46
S3X′NH3
=
cos 2π
3 0 sin 2π3
0 −1 0
− sin 2π3 0 cos 2π
3
0, 000000 −0, 190485 0, 901571 −0, 711084
0, 059665 −0, 276336 −0, 276335 −0, 276336
0, 000000 0, 931066 −0, 300568 −0, 630498
=
0, 000000 −0, 711084 −0, 190486 0, 901569
−0, 059665 0, 276336 0, 276335 0, 276336
0, 000000 −0, 630498 0, 931067 −0, 300568
(49)
Comparando as coordenadas após a operação, pode-se concluir que a molécula não possui
um eixo S3, pelo mesmo motivo encontrado para o eixo S6 anteriormente, logo, a amônia
não pertence ao grupo pontual C3h. Consequentemente, segundo o algoritmo, deve-se
veri�car a existência de planos σv na molécula. Conforme descrito, utilizando um vetor
qualquer paralelo ao eixo y, e um vetor posição de um átomo que não se encontre sobre
o eixo y, por exemplo, o primeiro hidrogênio, o átomo de número 2, é possível obter um
vetor diretor do plano que contém o eixo C3 e o átomo #2. A equação do plano é obtida
usando o versor do vetor obtido através do produto vetorial entre os vetores, e o centro de
massa da molécula, a origem do sistema. A matriz da operação de re�exão através deste
plano é:
σv =
−0, 919650 0, 000000 −0, 392739
0, 000000 1, 000000 0, 000000
−0, 392739 0, 000000 0, 919650
(50)
E a aplicação desta re�exão resulta nas seguintes coordenadas:
σvX′NH3
= σv
0, 000000 −0, 711084 −0, 190486 0, 901569
0, 059665 −0, 276336 −0, 276335 −0, 276336
−0, 000000 −0, 630498 0, 931067 −0, 300568
=
0, 000000 −0, 190485 −0, 711085 0, 901570
0, 059665 −0, 276336 −0, 276335 −0, 276336
0, 000000 0, 931066 −0, 630499 −0, 300568
(51)
Desta última operação observa-se que a molécula de amônia possui o plano de re�exão
que contém o eixo C3 e o primeiro átomo de hidrogênio da molécula. Portanto, através do

5 EXEMPLOS 47
algoritmo conclui-se corretamente que a molécula de amônia pertence ao grupo pontual
C3v.
5.2 Aleno
Como segundo exemplo do procedimento de alocação de grupo pontual, será utilizado
a molécula de aleno em sua conformação mais estável, a anti, como mostra a Figura 25,
novamente constituída pelos isótopos mais abundantes de cada elemento, o 1H e o 12C.
Na Tabela 4, abaixo, encontram-se as informações pertinentes ao procedimento.
Figura 25: Molécula de Aleno, conformação anti.
Tabela 4: Informações referentes à molécula de aleno
# Símbolo Massa atômica (uma) Coordenadas cartesianas (x;y;z)(Å)
1 C 12, 000000 (0, 000000; 0, 000000; 0, 000000)
2 C 12, 000000 (0, 686442; 0, 426203; 1, 062720)
5 C 12, 000000 (−0, 686442;−0, 426203;−1, 062720)
3 H 1, 007825 (1, 065720;−0, 430758; 1, 617416)
4 H 1, 007825 (0, 680464; 1, 514938; 1, 085950)
6 H 1, 007825 (−1, 732359;−0, 558795;−0, 789959)
7 H 1, 007825 (−0, 013827;−0, 525388;−1, 913409)
Novamente, o primeiro passo é o cálculo das distâncias interatômicas da molécula, em
Å:

5 EXEMPLOS 48
DC3H4 =
C1 C2 C3 H1 H2 H3 H4
0, 000000 1, 335000 1, 335000 1, 984274 1, 984277 1, 984277 1, 984277 C1
1, 335000 0, 000000 2, 670000 1, 089000 1, 089000 3, 202068 3, 202068 C2
1, 335000 2, 670000 0, 000000 3, 202065 3, 202068 1, 089000 1, 089000 C3
1, 984274 1, 089000 3, 202065 0, 000000 2, 053439 3, 693385 3, 693385 H1
1, 984277 1, 089000 3, 202068 2, 053439 0, 000000 3, 693389 3, 693389 H2
1, 984277 3, 202068 1, 089000 3, 693385 3, 693389 0, 000000 2, 053438 H3
1, 984277 3, 202068 1, 089000 3, 693385 3, 693389 2, 053438 0, 000000 H4
(52)
Da matriz de distâncias pode-se concluir que a molécula é composta por 3 conjuntos de
ASE, dentro de uma precisão de 10−4Å: I) o carbono central, II) os carbonos externos,
e III) os quatro hidrogênios. Calcula-se, então, o centro de massa da molécula que,
neste caso, encontra-se na origem do sistema de coordenadas atual, portanto a matriz de
coordenadas é a mesma que nos dados iniciais do exemplo:
XC3H4 =
0, 000000 0, 686442 −0, 686442 1, 065720 0, 680464 −1, 732359 −0, 013827
0, 000000 0, 426203 −0, 426203 −0, 430758 1, 514938 −0, 558795 −0, 525388
0, 000000 1, 062720 −1, 062720 1, 617416 1, 085950 −0, 789959 −1, 913409
(53)
Em seguida é calculado e diagonalizado o tensor de inércia da molécula, resultando
nos seguintes momentos principais de inércia, em umaÅ2:
I =
56, 521261 0, 000000 0, 0000000
0, 000000 56, 521262 0, 0000000
0, 000000 0, 000000 4, 249605
(54)
De onde classi�ca-se a molécula como um Pião Simétrico Prolato, pois IA < IB = IC ,
dentro de uma precisão de 10−3umaÅ2. Usando a matrizR, a nova orientação da molécula
é dada pela seguinte matriz:
X′C3H4
=
0, 000000 0, 000000 0, 000000 0, 185270 −0, 185269 −1, 009866 1, 009864
0, 000000 0, 000000 0, 000000 −1, 009867 1, 009864 −0, 185269 0, 185270
0, 000000 1, 335000 −1, 335000 1, 697996 1, 698001 −1, 697999 −1, 698001
(55)

5 EXEMPLOS 49
Da mesma maneira que no exemplo anterior, o procedimento irá seguir aquele apre-
sentado para rotores simétricos, portanto, o primeiro passo é identi�car a ordem do eixo
de rotação. É evidente que o primeiro conjunto de ASE se encaixa no arranjo pontual
e que o segundo se encaixa no arranjo linear, pois k = 2. O terceiro conjunto deve ser
analisado quando ao seu tensor de inércia, já diagonalizado:
IASEIII =
13, 747854 0, 000000 0, 0000000
0, 000000 13, 747852 0, 0000000
0, 000000 0, 000000 4, 249606
(56)
Conclui-se, portanto, que o conjunto é classi�cado também como Pião Simétrico Prolato,
sendo classi�cado como um "prisma"regular, de k = 4. Neste caso, o conjunto pode
apresentar, como eixo principal de rotação, um eixo C2, sendo paralelo ao eixo cartesiano
z. Como o primeiro conjunto de ASE pertence ao arranjo pontual, este será importante
somente na determinação da ordem do eixo de rotação da molécula como um todo; o
segundo conjunto, por sua vez, pode apresentar um eixo C∞ ao longo do seu eixo, que
situa-se sobre o eixo z, da mesma maneira que o eixo C2 presente no terceiro conjunto.
Para con�rmar a real ordem do eixo, aplica-se a operação de rotação própria de ordem
n = 2:
C2X′C3H4
=
0, 000000 0, 000000 0, 000000 −0, 185270 0, 185269 1, 009866 −1, 009864
0, 000000 0, 000000 0, 000000 1, 009867 −1, 009864 0, 185269 −0, 185270
0, 000000 1, 335000 −1, 335000 1, 697996 1, 698001 −1, 697999 −1, 698001
(57)
Que de fato existe, como observado na matriz de coordenadas resultante. Em seguida,
deve-se procurar por eixos C⊥2 , veri�cando-se inicialmente se o centro de massa de cada
conjunto de ASE coincide com o da molécula, na origem do sistema:
rICM = rIICM = rIIICM =
0, 000000
0, 000000
0, 000000
(58)
Com a primeira condição satisfeita, a próxima é localizar um vetor para aplicar a
operação C2 perpendicular ao eixo C2 principal. Existindo um conjunto com mais de 2

5 EXEMPLOS 50
átomos, este será escolhido para o teste, onde serão escolhidos, inicialmente, o primeiro e
o segundo hidrogênios do conjunto. O ponto médio entre estes átomos é:
r1PM =
0, 185270
−1, 009867
1, 697996
+
−0, 185269
1, 009864
1, 698001
=
0, 000000
0, 000002
1, 697998
(59)
Que encontra-se sobre o eixo z, dentro de uma precisão de 10−4Å, portanto este ponto será
descartado. O próximo ponto será calculado usando o primeiro e o terceiro hidrogênios do
conjunto. Neste caso, o ponto médio, já projetado sobre o plano xy, possui as coordenadas:
r2PM =
−0, 412298
−0, 597568
0, 000000
(60)
Evidentemente, este ponto não encontra-se na origem, por isso será utilizado na tentativa
de localizar um eixo C⊥2 na molécula. Conforme descrito na seção 4.2, a matriz de rotação
a será composta utilizando o versor do vetor posição do ponto médio escolhido, r2PM:
C⊥2 =
−0, 354972 0, 934877 0, 000000
0, 934877 0, 354972 0, 000000
0, 000000 0, 000000 −1, 000000
(61)
Aplicando, então, a operação C2 com a matriz acima, tem-se as seguintes coordenadas
resultantes:
C⊥2 X′
C3H4=
0, 000000 0, 000000 0, 000000 −1, 009867 1, 009864 0, 185271 −0, 185270
0, 000000 0, 000000 0, 000000 −0, 185270 0, 185270 −1, 009865 1, 009864
0, 000000 −1, 335000 1, 335000 −1, 697996 −1, 698001 1, 697999 1, 698001
(62)
Comparando a matriz acima com a matriz de coordenadas da equação 55 pode-se concluir
que a molécula possui o eixo C⊥2 localizado, dentro de uma precisão de 10−4Å. Con�rmada
a existência de eixos C2 ⊥, o algoritmo progride para os conjuntos diedrais, e o próximo
passo é veri�car se existe um eixo S4 colinear ao eixo C2 principal em z. Aplicando-se a
operação:

5 EXEMPLOS 51
S4X′C3H4
=
0, 000000 0, 000000 0, 000000 −1, 009867 1, 009864 −0, 185269 0, 185270
0, 000000 0, 000000 0, 000000 −0, 185270 0, 185269 1, 009866 −1, 009864
0, 000000 −1, 335000 1, 335000 −1, 697996 −1, 698001 1, 697999 1, 698001
(63)
Comparando as matrizes de coordenadas, pode-se observar que a molécula possui um
eixo S4 colinear ao eixo C2 principal, e, portanto, pertence ao grupo pontualD2d, conforme
era esperado.
Além dos dois exemplos apresentados, no Apêndice A encontram-se vários outros
exemplos compostos dos arquivos de entrada e de saída do programa aonde o método
fora implementado.

6 CONCLUSÕES 52
6 CONCLUSÕES
Neste trabalho foi apresentado um método para a identi�cação do grupo pontual de
moléculas, através de conceitos mais familiares à físicos e químicos. Conceitos como a
simetria rotacional de uma molécula e os conjuntos de átomos simetricamente equivalentes
que a compõem foram explorados com sucesso para a alocação de grupos pontuais.
Ao contrário de outros métodos publicados, o método apresentado não localiza todas as
operações de simetria em uma molécula, sendo que estas só são completamente conhecidas
após a identi�cação do grupo pontual molecular. Ao invés disso, o grupo pontual é
reconhecido através de um número mínimo de operações e independente da orientação
original da molécula, consequência principalmente de uma análise detalhada das operações
de simetria existentes nos grupos pontuais e das propriedades rotacionais de moléculas.
Devido a isso, o programa no qual foi implementado o algoritmo é de fácil utilização e
grande rapidez, necessitando de mínimo recurso computacional e apenas as informações
referentes aos átomos presentes na molécula e suas coordenadas cartesianas.
Para assegurar-se de que o método funciona, várias moléculas foram utilizadas como
teste, mas, como todo método recém-desenvolvido, são necessários muitos testes, princi-
palmente com arranjos de átomos, não necessariamente moléculas reais, que venham a
desa�ar o método proposto, apontando uma direção para melhorias, ou até mesmo a�r-
mando a solidez do método. Entre os pontos que possam vir a ser aprimorados, dois
reconhecidamente frágeis do método é a alocação do grupo pontual a piões esféricos e
a falta de provas matemáticas rigorosas para os conceitos e procedimentos introduzidos
durante o trabalho.
Entre as possibilidades para futuro trabalhos, pode-se considerar a expansão do mé-
todo para localização do grupo cristalográ�co em cristais. Algumas limitações podem ser
consideradas neste caso, assim como a localização de elementos de simetria inexistentes em
moléculas individuais, como a operação de translação, porém, em princípio, este método
se apresenta como uma forma de considerar este problema. Outras propostas incluem
a a localização das demais operações de simetria presentes na molécula e a geração das
matrizes que representam estas operações.

REFERÊNCIAS 53
REFERÊNCIAS
BALASUBRAMANIAN, Krishnan. Graph Theoretical Perception of Molecular Symme-try. Chem. Phys. Lett., São Francisco, v. 232, n. 5, p. 415-423, jan. 1995.
BALASUBRAMANIAN, Krishnan. Computer Perception of Molecular Symmetry. J.Chem. Inf. Comput. Sci., Washington, v. 35, n. 4, p. 761-770, jul. 1995.
BAUMSLAG, Benjamin; CHANDLER, Bruce. Schaum's Outline of Theory and Problemsof Group Theory. Nova York: McGraw-Hill, 1968.
DALTON, a molecular electronic structure program. Versão 2.0. Disponível em<http://www.kjemi.uio.no/software/dalton/dalton.html>. Acesso em: 06 mai. 2011.
CHEN, Wei; HUANG, Jing; GILSON, Michael K. Identi�cation of Symmetries in Mole-cules and Complexes. J. Chem. Inf. Comput. Sci., Washington, v. 44, n. 4, p. 1301-1313,jul. 2004.
GAUSSIAN 09,Revision A.1, Frisch, M. J.; Trucks, G. W.; Schlegel, H. B.; Scuseria, G.E.; Robb, M. A.; Cheeseman, J. R.; Scalmani, G.; Barone, V.; Mennucci, B.; Petersson,G. A.; Nakatsuji, H.; Caricato, M.; Li, X.; Hratchian, H. P.; Izmaylov, A. F.; Bloino, J.;Zheng, G.; Sonnenberg, J. L.; Hada, M.; Ehara, M.; Toyota, K.; Fukuda, R.; Hasegawa,J.; Ishida, M.; Nakajima, T.; Honda, Y.; Kitao, O.; Nakai, H.; Vreven, T.; Montgomery,Jr., J. A.; Peralta, J. E.; Ogliaro, F.; Bearpark, M.; Heyd, J. J.; Brothers, E.; Kudin,K. N.; Staroverov, V. N.; Kobayashi, R.; Normand, J.; Raghavachari, K.; Rendell, A.;Burant, J. C.; Iyengar, S. S.; Tomasi, J.; Cossi, M.; Rega, N.; Millam, N. J.; Klene,M.; Knox, J. E.; Cross, J. B.; Bakken, V.; Adamo, C.; Jaramillo, J.; Gomperts, R.;Stratmann, R. E.; Yazyev, O.; Austin, A. J.; Cammi, R.; Pomelli, C.; Ochterski, J.W.; Martin, R. L.; Morokuma, K.; Zakrzewski, V. G.; Voth, G. A.; Salvador, P.;Dannenberg, J. J.; Dapprich, S.; Daniels, A. D.; Farkas, Ö.; Foresman, J. B.; Ortiz, J.V.; Cioslowski, J.; Fox, D. J. Gaussian, Inc., Wallingford CT, 2009.
HARRIS, Daniel C.; BERTOLUCCI, Michael D. Symmetry and Spectroscopy: An Intro-duction to Vibrational and Electronic Spectroscopy. Nova York: Dover, 1989.
IVANOV, Julian. Molecular Symmetry Perception. J. Chem. Inf. Comput. Sci., Washing-ton, v. 44, n. 2, p. 596-600, mar. 2004.
IVANOV, Julian; SCHÜÜRMANN, Gerrit. Simple Algorithms for Determining MolecularSymmetry. J. Chem. Inf. Comput. Sci.,Washington, v. 39, n. 4, p. 728-737, jul. 1999.
KROTO, Harold W. Molecular Rotation Spectra. New York: Dover, 1992.
VIDAL, Luciano N.; VAZQUEZ, Pedro A. M. Determination of ab initio absolute Ramanexcitation pro�les using linear response theory. Int. J. Quantum Chem., v. 103, n. 5, p.632-648, abr. 2005.
WILSON, Edgar B.; DECIUS, J. C.; CROSS, Paul C. Molecular Vibrations: The Theoryof Infrared and Raman Vibrational Spectra. Nova York: Dover, 1980.
ZWILLINGER, Daniel; CRC Standard Mathematical Tables and Formulae. New York:Chappman & Hall/CRC, 2002.

A EXEMPLOS DO SOFTWARE 54
A Exemplos do software
Neste apêndice encontram-se os arquivos de entrada e os arquivos de saída, para várias
moléculas, do programa aonde fora implementado o método descrito no trabalho. Cada
molécula teve seu Grupo Pontual alocado corretamente.
Nos arquivos de entrada, o valor na primeira linha indica o numero de átomos da mo-
lécula, em seguida as colunas representam, respectivamente: o número atômico; o isótopo
escolhido, sendo 1 o de maior abundância natural; a coordenada em x; a coordenada em
y; e a coordenada em z, sendo todas as coordenadas em Å. Nas �guras representando
cada molécula, átomos de carbono estão em laranja, átomos de hidrogênio em branco,
átomos de oxigênio em vermelho, átomos de nitrogênio em azul, átomos de silício em bege
e átomos de metais, como o cobre e o cobalto, em amarelo.
A.1 1-Metil-2-pirrolidona
Figura 26: Molécula de 1-Metil-2-pirrolidona.
Arquivo de entrada:
16
6 1 0.000000 0.000000 0.000000
1 1 0.000000 0.000000 1.089000
1 1 1.026720 0.000000 -0.362996
1 1 -0.513360 0.889165 -0.363000
7 1 -0.678821 -1.175755 -0.480003
6 1 -1.924386 -1.381636 -0.165710
6 1 -2.300135 -2.528986 -0.735469
6 1 -1.115207 -3.017293 -1.453425
6 1 -0.164175 -2.105090 -1.231053
1 1 0.684467 -2.558029 -0.718458
1 1 -1.344070 -3.103983 -2.515595
1 1 -3.129530 -2.341479 -1.417411
8 1 -2.517292 -0.578573 0.535684

A EXEMPLOS DO SOFTWARE 55
1 1 -2.615415 -3.230815 0.035217
1 1 -0.830506 -3.993069 -1.062619
1 1 0.170334 -1.668448 -2.170930
Arquivo de saida:
**********************************************************************
PROGRAMA PARA LOCALIZACAO DE GRUPO PONTUAL MOLECULAR
Autor: Otavio Beruski
*********************************************************************
Numero de Atomos: 16
# Simbolo Z Massa isotopica (uma) Coordenadas x y z (angstrom)
1 C 6 12,000000 ( 0,000000 0,000000 0,000000 )
2 H 1 1,007825 ( 0,000000 0,000000 1,089000 )
3 H 1 1,007825 ( 1,026720 0,000000 -0,362996 )
4 H 1 1,007825 ( -0,513360 0,889165 -0,363000 )
5 N 7 14,003074 ( -0,678821 -1,175755 -0,480003 )
6 C 6 12,000000 ( -1,924386 -1,381636 -0,165710 )
7 C 6 12,000000 ( -2,300135 -2,528986 -0,735469 )
8 C 6 12,000000 ( -1,115207 -3,017293 -1,453425 )
9 C 6 12,000000 ( -0,164175 -2,105090 -1,231053 )
10 H 1 1,007825 ( 0,684467 -2,558029 -0,718458 )
11 H 1 1,007825 ( -1,344070 -3,103983 -2,515595 )
12 H 1 1,007825 ( -3,129530 -2,341479 -1,417411 )
13 O 8 15,994915 ( -2,517292 -0,578573 0,535684 )
14 H 1 1,007825 ( -2,615415 -3,230815 0,035217 )
15 H 1 1,007825 ( -0,830506 -3,993069 -1,062619 )
16 H 1 1,007825 ( 0,170334 -1,668448 -2,170930 )
Matriz de Distancias (angstrom)
1 2 3 4 5 6 7 8
1 0,000000 1,089000 1,089000 1,089000 1,440000 2,374792 3,496756 3,529899
2 1,089000 0,000000 1,778327 1,778330 2,074842 2,680760 3,874929 4,100203
3 1,089000 1,778327 0,000000 1,778331 2,074840 3,264486 4,195530 3,857583
4 1,089000 1,778330 1,778331 0,000000 2,074840 2,680756 3,874926 4,100203
5 1,440000 2,074842 2,074840 2,074840 0,000000 1,300999 2,127241 2,128202
6 2,374792 2,680760 3,264486 2,680756 1,300999 0,000000 1,335000 2,233462
7 3,496756 3,874929 4,195530 3,874926 2,127241 1,335000 0,000000 1,468999
8 3,529899 4,100203 3,857583 4,100203 2,128202 2,233462 1,468999 0,000000
9 2,444146 3,137037 2,569661 3,137038 1,301000 2,180982 2,233297 1,336423
10 2,743755 3,206074 2,605188 3,666645 1,956041 2,914712 2,984792 1,997480
11 4,215383 4,943110 4,459713 4,611830 2,881710 2,970725 2,100840 1,089999
12 4,157588 4,643122 4,885563 4,288728 2,871171 1,985051 1,090000 2,124975
13 2,637890 2,641527 3,701674 2,641521 2,183626 1,220001 2,338183 3,445251
14 4,156898 4,288242 4,884863 4,642354 2,870387 1,984277 1,089001 2,124211

A EXEMPLOS DO SOFTWARE 56
15 4,214677 4,611269 4,459076 4,942293 2,880921 2,969950 2,100089 1,089001
16 2,743295 3,666044 2,604946 3,205844 1,955261 2,913936 2,984006 1,996700
9 10 11 12 13 14 15 16
1 2,444146 2,743755 4,215383 4,157588 2,637890 4,156898 4,214677 2,743295
2 3,137037 3,206074 4,943110 4,643122 2,641527 4,288242 4,611269 3,666044
3 2,569661 2,605188 4,459713 4,885563 3,701674 4,884863 4,459076 2,604946
4 3,137038 3,666645 4,611830 4,288728 2,641521 4,642354 4,942293 3,205844
5 1,301000 1,956041 2,881710 2,871171 2,183626 2,870387 2,880921 1,955261
6 2,180982 2,914712 2,970725 1,985051 1,220001 1,984277 2,969950 2,913936
7 2,233297 2,984792 2,100840 1,090000 2,338183 1,089001 2,100089 2,984006
8 1,336423 1,997480 1,089999 2,124975 3,445251 2,124211 1,089001 1,996700
9 0,000000 1,090000 2,009972 2,980594 3,314932 2,979811 2,009187 1,089000
10 1,090000 0,000000 2,764549 3,883555 3,967667 3,451071 2,114930 1,779146
11 2,009972 2,764549 0,000000 2,230535 4,130914 2,852901 1,779146 2,114941
12 2,980594 3,883555 2,230535 0,000000 2,701343 1,779146 2,852917 3,451067
13 3,314932 3,967667 4,130914 2,701343 0,000000 2,700830 4,130206 3,966979
14 2,979811 3,451071 2,852901 1,779146 2,700830 0,000000 2,229837 3,881813
15 2,009187 2,114930 1,779146 2,852917 4,130206 2,229837 0,000000 2,762951
16 1,089000 1,779146 2,114941 3,451067 3,966979 3,881813 2,762951 0,000000
Existem 16 conjuntos de atomos simetricamente equivalentes (ASE).
# conjunto Atomos presentes
1 1
2 2
3 3
4 4
5 5
6 6
7 7
8 8
9 9
10 10
11 11
12 12
13 13
14 14
15 15
16 16
Coordenadas x,y,z do Centro de Massa (angstrom)
(-1,235701 -1,516592 -0,491848)
Coordenadas do sistema com o Centro de Massa na origem:
1 C 6 ( 1,235701 1,516592 0,491848 )
2 H 1 ( 1,235701 1,516592 1,580848 )

A EXEMPLOS DO SOFTWARE 57
3 H 1 ( 2,262421 1,516592 0,128852 )
4 H 1 ( 0,722341 2,405757 0,128848 )
5 N 7 ( 0,556880 0,340837 0,011845 )
6 C 6 ( -0,688685 0,134956 0,326138 )
7 C 6 ( -1,064434 -1,012394 -0,243621 )
8 C 6 ( 0,120494 -1,500701 -0,961577 )
9 C 6 ( 1,071526 -0,588498 -0,739205 )
10 H 1 ( 1,920168 -1,041437 -0,226610 )
11 H 1 ( -0,108369 -1,587391 -2,023747 )
12 H 1 ( -1,893829 -0,824887 -0,925563 )
13 O 8 ( -1,281591 0,938019 1,027532 )
14 H 1 ( -1,379714 -1,714223 0,527065 )
15 H 1 ( 0,405195 -2,476477 -0,570771 )
16 H 1 ( 1,406035 -0,151856 -1,679082 )
Tensor de Inercia (uma*A**2)
161,431636 -15,985002 23,596263
-15,985002 151,297841 -58,390407
23,596263 -58,390407 211,772515
Momentos Principais de Inercia (uma*A**2)
Ia = 115,730899, Ib = 152,898895, Ic = 255,872199
Simetria Rotacional: Piao Assimetrico.
Coordenadas do sistema com os eixos de inercia
coincidentes com os eixos cartesianos:
1 C 6 ( 1,232727 1,596655 -0,000067 )
2 H 1 ( 0,943923 2,155134 0,889098 )
3 H 1 ( 2,311349 1,446674 -0,000102 )
4 H 1 ( 0,943854 2,155099 -0,889232 )
5 N 7 ( 0,570322 0,318054 -0,000018 )
6 C 6 ( -0,729325 0,258749 0,000029 )
7 C 6 ( -1,074563 -1,030838 0,000067 )
8 C 6 ( 0,191334 -1,776132 0,000037 )
9 C 6 ( 1,151082 -0,846127 -0,000014 )
10 H 1 ( 1,773099 -0,941861 0,889947 )
11 H 1 ( 0,243711 -2,403275 -0,889932 )
12 H 1 ( -1,664907 -1,248951 -0,889889 )
13 O 8 ( -1,386854 1,286396 0,000030 )
14 H 1 ( -1,664303 -1,248714 0,889257 )
15 H 1 ( 0,243726 -2,402665 0,889214 )
16 H 1 ( 1,772465 -0,941809 -0,889199 )
Eixo de Rotacao de maior ordem: C1 em x.
Reflexao? -> Sim

A EXEMPLOS DO SOFTWARE 58
Grupo Pontual: Cs.
A.2 Amônia
Figura 27: Molécula de Amônia.
Arquivo de entrada:
4
7 1 0.000000 0.000000 0.000000
1 1 0.000000 0.000000 1.008000
1 1 0.950353 0.000000 -0.336000
1 1 -0.475176 -0.823029 -0.336000
Arquivo de saída:
**********************************************************************
PROGRAMA PARA LOCALIZACAO DE GRUPO PONTUAL MOLECULAR
Autor: Otavio Beruski
*********************************************************************
Numero de Atomos: 4
# Simbolo Z Massa isotopica (uma) Coordenadas x y z (angstrom)
1 N 7 14.003074 ( 0.000000 0.000000 0.000000 )
2 H 1 1.007825 ( 0.000000 0.000000 1.008000 )
3 H 1 1.007825 ( 0.950353 0.000000 -0.336000 )
4 H 1 1.007825 ( -0.475176 -0.823029 -0.336000 )
Matriz de Distancias (angstrom)
1 2 3 4
1 0.000000 1.008000 1.008001 1.008000
2 1.008000 0.000000 1.646058 1.646057
3 1.008001 1.646058 0.000000 1.646059
4 1.008000 1.646057 1.646059 0.000000

A EXEMPLOS DO SOFTWARE 59
Existem 2 conjuntos de atomos simetricamente equivalentes (ASE).
# conjunto Atomos presentes
1 1
2 2 3 4
Coordenadas x,y,z do Centro de Massa (angstrom)
(0.028126 -0.048716 0.019888)
Coordenadas do sistema com o Centro de Massa na origem:
1 N 7 ( -0.028126 0.048716 -0.019888 )
2 H 1 ( -0.028126 0.048716 0.988112 )
3 H 1 ( 0.922227 0.048716 -0.355888 )
4 H 1 ( -0.503302 -0.774313 -0.355888 )
Tensor de Inercia (uma*A**2)
1.887107 -0.417474 0.170433
-0.417474 2.369166 -0.295198
0.170433 -0.295198 1.766596
Momentos Principais de Inercia (uma*A**2)
Ia = 1.646079, Ib = 1.646082, Ic = 2.730709
Simetria Rotacional: Piao Simetrico Oblato.
Coordenadas do sistema com os eixos de inercia
coincidentes com os eixos cartesianos:
1 N 7 ( -0.000000 0.059665 0.000000 )
2 H 1 ( -0.190485 -0.276336 0.931066 )
3 H 1 ( 0.901571 -0.276335 -0.300568 )
4 H 1 ( -0.711084 -0.276336 -0.630498 )
Eixo de Rotacao de maior ordem: C3 em y.
C2 Perpendicular? -> Nao
S6? -> Nao
S3? -> Nao
Reflexao? -> Sim
Grupo Pontual: C3v.

A EXEMPLOS DO SOFTWARE 60
Figura 28: Molécula de bis-Pentacarbonilcobalto, em conformação anti.
A.3 bis-Pentacarbonilcobalto
Arquivo de entrada:
22
6 1 0.000000 0.000000 2.401000
8 1 0.000000 0.000000 3.621000
27 1 0.000000 0.000000 -0.000000
27 1 0.000000 0.000000 -3.038000
6 1 0.000000 0.000000 -5.439000
8 1 0.000000 0.000000 -6.659000
6 1 2.401000 0.000000 -0.000000
8 1 3.621000 0.000000 -0.000000
6 1 0.000000 -2.401000 -0.000000
8 1 0.000000 -3.621000 -0.000000
6 1 -2.401000 0.000000 -0.000000
8 1 -3.621000 0.000000 -0.000000
6 1 0.000000 2.401000 -0.000000
8 1 0.000000 3.621000 -0.000000
6 1 -1.697763 1.697763 -3.038000
8 1 -2.560434 2.560434 -3.038000
6 1 1.697763 1.697763 -3.038000
8 1 2.560434 2.560434 -3.038000
6 1 1.697763 -1.697763 -3.038000
8 1 2.560434 -2.560434 -3.038000
6 1 -1.697763 -1.697763 -3.038000
8 1 -2.560434 -2.560434 -3.038000
Arquivo de saida:
**********************************************************************
PROGRAMA PARA LOCALIZACAO DE GRUPO PONTUAL MOLECULAR
Autor: Otavio Beruski
*********************************************************************
Numero de Atomos: 22

A EXEMPLOS DO SOFTWARE 61
# Simbolo Z Massa isotopica (uma) Coordenadas x y z (angstrom)
1 C 6 12.000000 ( 0.000000 0.000000 2.401000 )
2 O 8 15.994915 ( 0.000000 0.000000 3.621000 )
3 Co 27 58.933200 ( 0.000000 0.000000 -0.000000 )
4 Co 27 58.933200 ( 0.000000 0.000000 -3.038000 )
5 C 6 12.000000 ( 0.000000 0.000000 -5.439000 )
6 O 8 15.994915 ( 0.000000 0.000000 -6.659000 )
7 C 6 12.000000 ( 2.401000 0.000000 -0.000000 )
8 O 8 15.994915 ( 3.621000 0.000000 -0.000000 )
9 C 6 12.000000 ( 0.000000 -2.401000 -0.000000 )
10 O 8 15.994915 ( 0.000000 -3.621000 -0.000000 )
11 C 6 12.000000 ( -2.401000 0.000000 -0.000000 )
12 O 8 15.994915 ( -3.621000 0.000000 -0.000000 )
13 C 6 12.000000 ( 0.000000 2.401000 -0.000000 )
14 O 8 15.994915 ( 0.000000 3.621000 -0.000000 )
15 C 6 12.000000 ( -1.697763 1.697763 -3.038000 )
16 O 8 15.994915 ( -2.560434 2.560434 -3.038000 )
17 C 6 12.000000 ( 1.697763 1.697763 -3.038000 )
18 O 8 15.994915 ( 2.560434 2.560434 -3.038000 )
19 C 6 12.000000 ( 1.697763 -1.697763 -3.038000 )
20 O 8 15.994915 ( 2.560434 -2.560434 -3.038000 )
21 C 6 12.000000 ( -1.697763 -1.697763 -3.038000 )
22 O 8 15.994915 ( -2.560434 -2.560434 -3.038000 )
Matriz de Distancias (angstrom)
1 2 3 4 5 6 7 8
1 0.000000 1.220000 2.401000 5.439000 7.840000 9.060000 3.395527 4.344703
2 1.220000 0.000000 3.621000 6.659000 9.060000 10.280000 4.344703 5.120867
3 2.401000 3.621000 0.000000 3.038000 5.439000 6.659000 2.401000 3.621000
4 5.439000 6.659000 3.038000 0.000000 2.401000 3.621000 3.872240 4.726636
5 7.840000 9.060000 5.439000 2.401000 0.000000 1.220000 5.945378 6.534092
6 9.060000 10.280000 6.659000 3.621000 1.220000 0.000000 7.078636 7.579837
7 3.395527 4.344703 2.401000 3.872240 5.945378 7.078636 0.000000 1.220000
8 4.344703 5.120867 3.621000 4.726636 6.534092 7.579837 1.220000 0.000000
9 3.395527 4.344703 2.401000 3.872240 5.945378 7.078636 3.395527 4.344703
10 4.344703 5.120867 3.621000 4.726636 6.534092 7.579837 4.344703 5.120867
11 3.395527 4.344703 2.401000 3.872240 5.945378 7.078636 4.802000 6.022000
12 4.344703 5.120867 3.621000 4.726636 6.534092 7.579837 6.022000 7.242000
13 3.395527 4.344703 2.401000 3.872240 5.945378 7.078636 3.395527 4.344703
14 4.344703 5.120867 3.621000 4.726636 6.534092 7.579837 4.344703 5.120867
15 5.945378 7.078635 3.872240 2.400999 3.395526 4.344702 5.376960 6.356185
16 6.534093 7.579837 4.726636 3.621000 4.344703 5.120868 6.356185 7.348156
17 5.945378 7.078635 3.872240 2.400999 3.395526 4.344702 3.550547 3.976265
18 6.534093 7.579837 4.726636 3.621000 4.344703 5.120868 3.976265 4.112185
19 5.945378 7.078635 3.872240 2.400999 3.395526 4.344702 3.550547 3.976265
20 6.534093 7.579837 4.726636 3.621000 4.344703 5.120868 3.976265 4.112185
21 5.945378 7.078635 3.872240 2.400999 3.395526 4.344702 5.376960 6.356185
A EXEMPLOS DO SOFTWARE 62
22 6.534093 7.579837 4.726636 3.621000 4.344703 5.120868 6.356185 7.348156
9 10 11 12 13 14 15 16
1 3.395527 4.344703 3.395527 4.344703 3.395527 4.344703 5.945378 6.534093
2 4.344703 5.120867 4.344703 5.120867 4.344703 5.120867 7.078635 7.579837
3 2.401000 3.621000 2.401000 3.621000 2.401000 3.621000 3.872240 4.726636
4 3.872240 4.726636 3.872240 4.726636 3.872240 4.726636 2.400999 3.621000
5 5.945378 6.534092 5.945378 6.534092 5.945378 6.534092 3.395526 4.344703
6 7.078636 7.579837 7.078636 7.579837 7.078636 7.579837 4.344702 5.120868
7 3.395527 4.344703 4.802000 6.022000 3.395527 4.344703 5.376960 6.356185
8 4.344703 5.120867 6.022000 7.242000 4.344703 5.120867 6.356185 7.348156
9 0.000000 1.220000 3.395527 4.344703 4.802000 6.022000 5.376960 6.356185
10 1.220000 0.000000 4.344703 5.120867 6.022000 7.242000 6.356185 7.348156
11 3.395527 4.344703 0.000000 1.220000 3.395527 4.344703 3.550547 3.976265
12 4.344703 5.120867 1.220000 0.000000 4.344703 5.120867 3.976265 4.112185
13 4.802000 6.022000 3.395527 4.344703 0.000000 1.220000 3.550547 3.976265
14 6.022000 7.242000 4.344703 5.120867 1.220000 0.000000 3.976265 4.112185
15 5.376960 6.356185 3.550547 3.976265 3.550547 3.976265 0.000000 1.220001
16 6.356185 7.348156 3.976265 4.112185 3.976265 4.112185 1.220001 0.000000
17 5.376960 6.356185 5.376960 6.356185 3.550547 3.976265 3.395526 4.344703
18 6.356185 7.348156 6.356185 7.348156 3.976265 4.112185 4.344703 5.120868
19 3.550547 3.976265 5.376960 6.356185 5.376960 6.356185 4.801999 6.022000
20 3.976265 4.112185 6.356185 7.348156 6.356185 7.348156 6.022000 7.242001
21 3.550547 3.976265 3.550547 3.976265 5.376960 6.356185 3.395526 4.344703
22 3.976265 4.112185 3.976265 4.112185 6.356185 7.348156 4.344703 5.120868
17 18 19 20 21 22
1 5.945378 6.534093 5.945378 6.534093 5.945378 6.534093
2 7.078635 7.579837 7.078635 7.579837 7.078635 7.579837
3 3.872240 4.726636 3.872240 4.726636 3.872240 4.726636
4 2.400999 3.621000 2.400999 3.621000 2.400999 3.621000
5 3.395526 4.344703 3.395526 4.344703 3.395526 4.344703
6 4.344702 5.120868 4.344702 5.120868 4.344702 5.120868
7 3.550547 3.976265 3.550547 3.976265 5.376960 6.356185
8 3.976265 4.112185 3.976265 4.112185 6.356185 7.348156
9 5.376960 6.356185 3.550547 3.976265 3.550547 3.976265
10 6.356185 7.348156 3.976265 4.112185 3.976265 4.112185
11 5.376960 6.356185 5.376960 6.356185 3.550547 3.976265
12 6.356185 7.348156 6.356185 7.348156 3.976265 4.112185
13 3.550547 3.976265 5.376960 6.356185 5.376960 6.356185
14 3.976265 4.112185 6.356185 7.348156 6.356185 7.348156
15 3.395526 4.344703 4.801999 6.022000 3.395526 4.344703
16 4.344703 5.120868 6.022000 7.242001 4.344703 5.120868
17 0.000000 1.220001 3.395526 4.344703 4.801999 6.022000
18 1.220001 0.000000 4.344703 5.120868 6.022000 7.242001
19 3.395526 4.344703 0.000000 1.220001 3.395526 4.344703
20 4.344703 5.120868 1.220001 0.000000 4.344703 5.120868
21 4.801999 6.022000 3.395526 4.344703 0.000000 1.220001

A EXEMPLOS DO SOFTWARE 63
22 6.022000 7.242001 4.344703 5.120868 1.220001 0.000000
Existem 5 conjuntos de atomos simetricamente equivalentes (ASE).
# conjunto Atomos presentes
1 1 5
2 2 6
3 3 4
4 7 9 11 13 15 17 19 21
5 8 10 12 14 16 18 20 22
Coordenadas x,y,z do Centro de Massa (angstrom)
(0.000000 -0.000000 -1.519000)
Coordenadas do sistema com o Centro de Massa na origem:
1 C 6 ( 0.000000 0.000000 3.920000 )
2 O 8 ( 0.000000 0.000000 5.140000 )
3 Co 27 ( 0.000000 0.000000 1.519000 )
4 Co 27 ( 0.000000 0.000000 -1.519000 )
5 C 6 ( 0.000000 0.000000 -3.920000 )
6 O 8 ( 0.000000 0.000000 -5.140000 )
7 C 6 ( 2.401000 0.000000 1.519000 )
8 O 8 ( 3.621000 0.000000 1.519000 )
9 C 6 ( 0.000000 -2.401000 1.519000 )
10 O 8 ( 0.000000 -3.621000 1.519000 )
11 C 6 ( -2.401000 0.000000 1.519000 )
12 O 8 ( -3.621000 0.000000 1.519000 )
13 C 6 ( 0.000000 2.401000 1.519000 )
14 O 8 ( 0.000000 3.621000 1.519000 )
15 C 6 ( -1.697763 1.697763 -1.519000 )
16 O 8 ( -2.560434 2.560434 -1.519000 )
17 C 6 ( 1.697763 1.697763 -1.519000 )
18 O 8 ( 2.560434 2.560434 -1.519000 )
19 C 6 ( 1.697763 -1.697763 -1.519000 )
20 O 8 ( 2.560434 -2.560434 -1.519000 )
21 C 6 ( -1.697763 -1.697763 -1.519000 )
22 O 8 ( -2.560434 -2.560434 -1.519000 )
Tensor de Inercia (uma*A**2)
3118.256233 -0.000000 0.000000
-0.000000 3118.256233 -0.000000
0.000000 -0.000000 2231.177625
Momentos Principais de Inercia (uma*A**2)
Ia = 2231.177625, Ib = 3118.256233, Ic = 3118.256233
Simetria Rotacional: Piao Simetrico Prolato.

A EXEMPLOS DO SOFTWARE 64
Coordenadas do sistema com os eixos de inercia
coincidentes com os eixos cartesianos:
1 C 6 ( 0.000000 0.000000 3.920000 )
2 O 8 ( 0.000000 0.000000 5.140000 )
3 Co 27 ( 0.000000 0.000000 1.519000 )
4 Co 27 ( 0.000000 0.000000 -1.519000 )
5 C 6 ( 0.000000 0.000000 -3.920000 )
6 O 8 ( 0.000000 0.000000 -5.140000 )
7 C 6 ( 2.401000 0.000000 1.519000 )
8 O 8 ( 3.621000 0.000000 1.519000 )
9 C 6 ( 0.000000 -2.401000 1.519000 )
10 O 8 ( 0.000000 -3.621000 1.519000 )
11 C 6 ( -2.401000 0.000000 1.519000 )
12 O 8 ( -3.621000 0.000000 1.519000 )
13 C 6 ( 0.000000 2.401000 1.519000 )
14 O 8 ( 0.000000 3.621000 1.519000 )
15 C 6 ( -1.697763 1.697763 -1.519000 )
16 O 8 ( -2.560434 2.560434 -1.519000 )
17 C 6 ( 1.697763 1.697763 -1.519000 )
18 O 8 ( 2.560434 2.560434 -1.519000 )
19 C 6 ( 1.697763 -1.697763 -1.519000 )
20 O 8 ( 2.560434 -2.560434 -1.519000 )
21 C 6 ( -1.697763 -1.697763 -1.519000 )
22 O 8 ( -2.560434 -2.560434 -1.519000 )
Eixo de Rotacao de maior ordem: C4 em z.
C2 Perpendicular? -> Sim
S8? -> Sim
Grupo Pontual: D4d.
A.4 Cubano
Figura 29: Molécula de Cubano.

A EXEMPLOS DO SOFTWARE 65
Arquivo de entrada:
16
6 1 -0.725000 0.725000 -0.725000
6 1 -0.725000 0.725000 0.725000
6 1 0.725000 0.725000 -0.725000
6 1 0.725000 0.725000 0.725000
6 1 0.725000 -0.725000 0.725000
6 1 -0.725000 -0.725000 0.725000
6 1 -0.725000 -0.725000 -0.725000
6 1 0.725000 -0.725000 -0.725000
1 1 -1.353734 1.353734 -1.353734
1 1 -1.353734 1.353734 1.353734
1 1 1.353734 1.353734 -1.353734
1 1 1.353734 1.353734 1.353734
1 1 1.353734 -1.353734 1.353734
1 1 -1.353734 -1.353734 1.353734
1 1 -1.353734 -1.353734 -1.353734
1 1 1.353734 -1.353734 -1.353734
Arquivo de saida:
**********************************************************************
PROGRAMA PARA LOCALIZACAO DE GRUPO PONTUAL MOLECULAR
Autor: Otavio Beruski
*********************************************************************
Numero de Atomos: 16
# Simbolo Z Massa isotopica (uma) Coordenadas x y z (angstrom)
1 C 6 12.000000 ( -0.725000 0.725000 -0.725000 )
2 C 6 12.000000 ( -0.725000 0.725000 0.725000 )
3 C 6 12.000000 ( 0.725000 0.725000 -0.725000 )
4 C 6 12.000000 ( 0.725000 0.725000 0.725000 )
5 C 6 12.000000 ( 0.725000 -0.725000 0.725000 )
6 C 6 12.000000 ( -0.725000 -0.725000 0.725000 )
7 C 6 12.000000 ( -0.725000 -0.725000 -0.725000 )
8 C 6 12.000000 ( 0.725000 -0.725000 -0.725000 )
9 H 1 1.007825 ( -1.353734 1.353734 -1.353734 )
10 H 1 1.007825 ( -1.353734 1.353734 1.353734 )
11 H 1 1.007825 ( 1.353734 1.353734 -1.353734 )
12 H 1 1.007825 ( 1.353734 1.353734 1.353734 )
13 H 1 1.007825 ( 1.353734 -1.353734 1.353734 )
14 H 1 1.007825 ( -1.353734 -1.353734 1.353734 )
15 H 1 1.007825 ( -1.353734 -1.353734 -1.353734 )
16 H 1 1.007825 ( 1.353734 -1.353734 -1.353734 )

A EXEMPLOS DO SOFTWARE 66
Matriz de Distancias (angstrom)
1 2 3 4 5 6 7 8
1 0.000000 1.450000 1.450000 2.050610 2.511474 2.050610 1.450000 2.050610
2 1.450000 0.000000 2.050610 1.450000 2.050610 1.450000 2.050610 2.511474
3 1.450000 2.050610 0.000000 1.450000 2.050610 2.511474 2.050610 1.450000
4 2.050610 1.450000 1.450000 0.000000 1.450000 2.050610 2.511474 2.050610
5 2.511474 2.050610 2.050610 1.450000 0.000000 1.450000 2.050610 1.450000
6 2.050610 1.450000 2.511474 2.050610 1.450000 0.000000 1.450000 2.050610
7 1.450000 2.050610 2.050610 2.511474 2.050610 1.450000 0.000000 1.450000
8 2.050610 2.511474 1.450000 2.050610 1.450000 2.050610 1.450000 0.000000
9 1.088999 2.260917 2.260917 3.006256 3.600473 3.006256 2.260917 3.006256
10 2.260917 1.088999 3.006256 2.260917 3.006256 2.260917 3.006256 3.600473
11 2.260917 3.006256 1.088999 2.260917 3.006256 3.600473 3.006256 2.260917
12 3.006256 2.260917 2.260917 1.088999 2.260917 3.006256 3.600473 3.006256
13 3.600473 3.006256 3.006256 2.260917 1.088999 2.260917 3.006256 2.260917
14 3.006256 2.260917 3.600473 3.006256 2.260917 1.088999 2.260917 3.006256
15 2.260917 3.006256 3.006256 3.600473 3.006256 2.260917 1.088999 2.260917
16 3.006256 3.600473 2.260917 3.006256 2.260917 3.006256 2.260917 1.088999
9 10 11 12 13 14 15 16
1 1.088999 2.260917 2.260917 3.006256 3.600473 3.006256 2.260917 3.006256
2 2.260917 1.088999 3.006256 2.260917 3.006256 2.260917 3.006256 3.600473
3 2.260917 3.006256 1.088999 2.260917 3.006256 3.600473 3.006256 2.260917
4 3.006256 2.260917 2.260917 1.088999 2.260917 3.006256 3.600473 3.006256
5 3.600473 3.006256 3.006256 2.260917 1.088999 2.260917 3.006256 2.260917
6 3.006256 2.260917 3.600473 3.006256 2.260917 1.088999 2.260917 3.006256
7 2.260917 3.006256 3.006256 3.600473 3.006256 2.260917 1.088999 2.260917
8 3.006256 3.600473 2.260917 3.006256 2.260917 3.006256 2.260917 1.088999
9 0.000000 2.707468 2.707468 3.828938 4.689472 3.828938 2.707468 3.828938
10 2.707468 0.000000 3.828938 2.707468 3.828938 2.707468 3.828938 4.689472
11 2.707468 3.828938 0.000000 2.707468 3.828938 4.689472 3.828938 2.707468
12 3.828938 2.707468 2.707468 0.000000 2.707468 3.828938 4.689472 3.828938
13 4.689472 3.828938 3.828938 2.707468 0.000000 2.707468 3.828938 2.707468
14 3.828938 2.707468 4.689472 3.828938 2.707468 0.000000 2.707468 3.828938
15 2.707468 3.828938 3.828938 4.689472 3.828938 2.707468 0.000000 2.707468
16 3.828938 4.689472 2.707468 3.828938 2.707468 3.828938 2.707468 0.000000
Existem 2 conjuntos de atomos simetricamente equivalentes (ASE).
# conjunto Atomos presentes
1 1 2 3 4 5 6 7 8
2 9 10 11 12 13 14 15 16
Coordenadas x,y,z do Centro de Massa (angstrom)
(0.000000 0.000000 0.000000)
Coordenadas do sistema com o Centro de Massa na origem:

A EXEMPLOS DO SOFTWARE 67
1 C 6 ( -0.725000 0.725000 -0.725000 )
2 C 6 ( -0.725000 0.725000 0.725000 )
3 C 6 ( 0.725000 0.725000 -0.725000 )
4 C 6 ( 0.725000 0.725000 0.725000 )
5 C 6 ( 0.725000 -0.725000 0.725000 )
6 C 6 ( -0.725000 -0.725000 0.725000 )
7 C 6 ( -0.725000 -0.725000 -0.725000 )
8 C 6 ( 0.725000 -0.725000 -0.725000 )
9 H 1 ( -1.353734 1.353734 -1.353734 )
10 H 1 ( -1.353734 1.353734 1.353734 )
11 H 1 ( 1.353734 1.353734 -1.353734 )
12 H 1 ( 1.353734 1.353734 1.353734 )
13 H 1 ( 1.353734 -1.353734 1.353734 )
14 H 1 ( -1.353734 -1.353734 1.353734 )
15 H 1 ( -1.353734 -1.353734 -1.353734 )
16 H 1 ( 1.353734 -1.353734 -1.353734 )
Tensor de Inercia (uma*A**2)
130.470974 -0.000000 -0.000000
-0.000000 130.470974 -0.000000
-0.000000 -0.000000 130.470974
Momentos Principais de Inercia (uma*A**2)
Ia = 130.470974, Ib = 130.470974, Ic = 130.470974
Simetria Rotacional: Piao Esferico.
Coordenadas do sistema com os eixos de inercia
coincidentes com os eixos cartesianos:
1 C 6 ( -0.725000 0.725000 -0.725000 )
2 C 6 ( -0.725000 0.725000 0.725000 )
3 C 6 ( 0.725000 0.725000 -0.725000 )
4 C 6 ( 0.725000 0.725000 0.725000 )
5 C 6 ( 0.725000 -0.725000 0.725000 )
6 C 6 ( -0.725000 -0.725000 0.725000 )
7 C 6 ( -0.725000 -0.725000 -0.725000 )
8 C 6 ( 0.725000 -0.725000 -0.725000 )
9 H 1 ( -1.353734 1.353734 -1.353734 )
10 H 1 ( -1.353734 1.353734 1.353734 )
11 H 1 ( 1.353734 1.353734 -1.353734 )
12 H 1 ( 1.353734 1.353734 1.353734 )
13 H 1 ( 1.353734 -1.353734 1.353734 )
14 H 1 ( -1.353734 -1.353734 1.353734 )
15 H 1 ( -1.353734 -1.353734 -1.353734 )
16 H 1 ( 1.353734 -1.353734 -1.353734 )

A EXEMPLOS DO SOFTWARE 68
Grupo Pontual: Oh.
A.5 Hexanitrocuprato
Figura 30: Molécula de Hexanitrocuprato.
Arquivo de entrada:
19
29 1 0.000000 0.000000 0.000000
7 1 0.000000 0.000000 2.548000
7 1 2.548000 0.000000 0.000000
7 1 0.000000 0.000000 -2.548000
7 1 -2.548000 0.000000 0.000000
7 1 0.000000 2.548000 0.000000
7 1 0.000000 -2.548000 0.000000
8 1 3.248000 0.000000 -1.212436
8 1 3.248000 0.000000 1.212436
8 1 -3.248000 0.000000 -1.212436
8 1 -3.248000 0.000000 1.212436
8 1 -1.212436 3.248000 0.000000
8 1 1.212436 3.248000 0.000000
8 1 1.212436 -3.248000 0.000000
8 1 -1.212436 -3.248000 0.000000
8 1 0.000000 -1.212436 -3.248000
8 1 0.000000 1.212436 -3.248000
8 1 0.000000 1.212436 3.248000
8 1 0.000000 -1.212436 3.248000
Arquivo de saida:
**********************************************************************
PROGRAMA PARA LOCALIZACAO DE GRUPO PONTUAL MOLECULAR
Autor: Otavio Beruski
*********************************************************************

A EXEMPLOS DO SOFTWARE 69
Numero de Atomos: 19
# Simbolo Z Massa isotopica (uma) Coordenadas x y z (angstrom)
1 Cu 29 62.929601 ( 0.000000 0.000000 0.000000 )
2 N 7 14.003074 ( 0.000000 0.000000 2.548000 )
3 N 7 14.003074 ( 2.548000 0.000000 0.000000 )
4 N 7 14.003074 ( 0.000000 0.000000 -2.548000 )
5 N 7 14.003074 ( -2.548000 0.000000 0.000000 )
6 N 7 14.003074 ( 0.000000 2.548000 0.000000 )
7 N 7 14.003074 ( 0.000000 -2.548000 0.000000 )
8 O 8 15.994915 ( 3.248000 0.000000 -1.212436 )
9 O 8 15.994915 ( 3.248000 0.000000 1.212436 )
10 O 8 15.994915 ( -3.248000 0.000000 -1.212436 )
11 O 8 15.994915 ( -3.248000 0.000000 1.212436 )
12 O 8 15.994915 ( -1.212436 3.248000 0.000000 )
13 O 8 15.994915 ( 1.212436 3.248000 0.000000 )
14 O 8 15.994915 ( 1.212436 -3.248000 0.000000 )
15 O 8 15.994915 ( -1.212436 -3.248000 0.000000 )
16 O 8 15.994915 ( 0.000000 -1.212436 -3.248000 )
17 O 8 15.994915 ( 0.000000 1.212436 -3.248000 )
18 O 8 15.994915 ( 0.000000 1.212436 3.248000 )
19 O 8 15.994915 ( 0.000000 -1.212436 3.248000 )
Matriz de Distancias (angstrom)
1 2 3 4 5 6 7 8
1 0.000000 2.548000 2.548000 2.548000 2.548000 2.548000 2.548000 3.466916
2 2.548000 0.000000 3.603416 5.096000 3.603416 3.603416 3.603416 4.968942
3 2.548000 3.603416 0.000000 3.603416 5.096000 3.603416 3.603416 1.400000
4 2.548000 5.096000 3.603416 0.000000 3.603416 3.603416 3.603416 3.511871
5 2.548000 3.603416 5.096000 3.603416 0.000000 3.603416 3.603416 5.921454
6 2.548000 3.603416 3.603416 3.603416 3.603416 0.000000 5.096000 4.302535
7 2.548000 3.603416 3.603416 3.603416 3.603416 5.096000 0.000000 4.302535
8 3.466916 4.968942 1.400000 3.511871 5.921454 4.302535 4.302535 0.000000
9 3.466916 3.511871 1.400000 4.968942 5.921454 4.302535 4.302535 2.424872
10 3.466916 4.968942 5.921454 3.511871 1.400000 4.302535 4.302535 6.496000
11 3.466916 3.511871 5.921454 4.968942 1.400000 4.302535 4.302535 6.933832
12 3.466916 4.302535 4.968942 4.302535 3.511871 1.400000 5.921454 5.649336
13 3.466916 4.302535 3.511871 4.302535 4.968942 1.400000 5.921454 4.020327
14 3.466916 4.302535 3.511871 4.302535 4.968942 5.921454 1.400000 4.020327
15 3.466916 4.302535 4.968942 4.302535 3.511871 5.921454 1.400000 5.649336
16 3.466916 5.921454 4.302535 1.400000 4.302535 4.968942 3.511871 4.020327
17 3.466916 5.921454 4.302535 1.400000 4.302535 3.511871 4.968942 4.020327
18 3.466916 1.400000 4.302535 5.921454 4.302535 3.511871 4.968942 5.649336
19 3.466916 1.400000 4.302535 5.921454 4.302535 4.968942 3.511871 5.649336
9 10 11 12 13 14 15 16
1 3.466916 3.466916 3.466916 3.466916 3.466916 3.466916 3.466916 3.466916

A EXEMPLOS DO SOFTWARE 70
2 3.511871 4.968942 3.511871 4.302535 4.302535 4.302535 4.302535 5.921454
3 1.400000 5.921454 5.921454 4.968942 3.511871 3.511871 4.968942 4.302535
4 4.968942 3.511871 4.968942 4.302535 4.302535 4.302535 4.302535 1.400000
5 5.921454 1.400000 1.400000 3.511871 4.968942 4.968942 3.511871 4.302535
6 4.302535 4.302535 4.302535 1.400000 1.400000 5.921454 5.921454 4.968942
7 4.302535 4.302535 4.302535 5.921454 5.921454 1.400000 1.400000 3.511871
8 2.424872 6.496000 6.933832 5.649336 4.020327 4.020327 5.649336 4.020327
9 0.000000 6.933832 6.496000 5.649336 4.020327 4.020327 5.649336 5.649336
10 6.933832 0.000000 2.424872 4.020327 5.649336 5.649336 4.020327 4.020327
11 6.496000 2.424872 0.000000 4.020327 5.649336 5.649336 4.020327 5.649336
12 5.649336 4.020327 4.020327 0.000000 2.424872 6.933832 6.496000 5.649336
13 4.020327 5.649336 5.649336 2.424872 0.000000 6.496000 6.933832 5.649336
14 4.020327 5.649336 5.649336 6.933832 6.496000 0.000000 2.424872 4.020327
15 5.649336 4.020327 4.020327 6.496000 6.933832 2.424872 0.000000 4.020327
16 5.649336 4.020327 5.649336 5.649336 5.649336 4.020327 4.020327 0.000000
17 5.649336 4.020327 5.649336 4.020327 4.020327 5.649336 5.649336 2.424872
18 4.020327 5.649336 4.020327 4.020327 4.020327 5.649336 5.649336 6.933832
19 4.020327 5.649336 4.020327 5.649336 5.649336 4.020327 4.020327 6.496000
17 18 19
1 3.466916 3.466916 3.466916
2 5.921454 1.400000 1.400000
3 4.302535 4.302535 4.302535
4 1.400000 5.921454 5.921454
5 4.302535 4.302535 4.302535
6 3.511871 3.511871 4.968942
7 4.968942 4.968942 3.511871
8 4.020327 5.649336 5.649336
9 5.649336 4.020327 4.020327
10 4.020327 5.649336 5.649336
11 5.649336 4.020327 4.020327
12 4.020327 4.020327 5.649336
13 4.020327 4.020327 5.649336
14 5.649336 5.649336 4.020327
15 5.649336 5.649336 4.020327
16 2.424872 6.933832 6.496000
17 0.000000 6.496000 6.933832
18 6.496000 0.000000 2.424872
19 6.933832 2.424872 0.000000
Existem 3 conjuntos de atomos simetricamente equivalentes (ASE).
# conjunto Atomos presentes
1 1
2 2 3 4 5 6 7
3 8 9 10 11 12 13 14 15 16 17 18 19
Coordenadas x,y,z do Centro de Massa (angstrom)

A EXEMPLOS DO SOFTWARE 71
(0.000000 0.000000 0.000000)
Coordenadas do sistema com o Centro de Massa na origem:
1 Cu 29 ( 0.000000 0.000000 0.000000 )
2 N 7 ( 0.000000 0.000000 2.548000 )
3 N 7 ( 2.548000 0.000000 0.000000 )
4 N 7 ( 0.000000 0.000000 -2.548000 )
5 N 7 ( -2.548000 0.000000 0.000000 )
6 N 7 ( 0.000000 2.548000 0.000000 )
7 N 7 ( 0.000000 -2.548000 0.000000 )
8 O 8 ( 3.248000 0.000000 -1.212436 )
9 O 8 ( 3.248000 0.000000 1.212436 )
10 O 8 ( -3.248000 0.000000 -1.212436 )
11 O 8 ( -3.248000 0.000000 1.212436 )
12 O 8 ( -1.212436 3.248000 0.000000 )
13 O 8 ( 1.212436 3.248000 0.000000 )
14 O 8 ( 1.212436 -3.248000 0.000000 )
15 O 8 ( -1.212436 -3.248000 0.000000 )
16 O 8 ( 0.000000 -1.212436 -3.248000 )
17 O 8 ( 0.000000 1.212436 -3.248000 )
18 O 8 ( 0.000000 1.212436 3.248000 )
19 O 8 ( 0.000000 -1.212436 3.248000 )
Tensor de Inercia (uma*A**2)
1901.656511 -0.000000 -0.000000
-0.000000 1901.656511 -0.000000
-0.000000 -0.000000 1901.656511
Momentos Principais de Inercia (uma*A**2)
Ia = 1901.656511, Ib = 1901.656511, Ic = 1901.656511
Simetria Rotacional: Piao Esferico.
Coordenadas do sistema com os eixos de inercia
coincidentes com os eixos cartesianos:
1 Cu 29 ( 0.000000 0.000000 0.000000 )
2 N 7 ( 0.000000 0.000000 2.548000 )
3 N 7 ( 2.548000 0.000000 0.000000 )
4 N 7 ( 0.000000 0.000000 -2.548000 )
5 N 7 ( -2.548000 0.000000 0.000000 )
6 N 7 ( 0.000000 2.548000 0.000000 )
7 N 7 ( 0.000000 -2.548000 0.000000 )
8 O 8 ( 3.248000 0.000000 -1.212436 )
9 O 8 ( 3.248000 0.000000 1.212436 )
10 O 8 ( -3.248000 0.000000 -1.212436 )
11 O 8 ( -3.248000 0.000000 1.212436 )

A EXEMPLOS DO SOFTWARE 72
12 O 8 ( -1.212436 3.248000 0.000000 )
13 O 8 ( 1.212436 3.248000 0.000000 )
14 O 8 ( 1.212436 -3.248000 0.000000 )
15 O 8 ( -1.212436 -3.248000 0.000000 )
16 O 8 ( 0.000000 -1.212436 -3.248000 )
17 O 8 ( 0.000000 1.212436 -3.248000 )
18 O 8 ( 0.000000 1.212436 3.248000 )
19 O 8 ( 0.000000 -1.212436 3.248000 )
Grupo Pontual: Th.
A.6 Peróxido de Hidrogênio
Figura 31: Molécula de Peróxido de hidrogênio.
Arquivo de entrada:
4
8 1 0.000000 0.000000 0.000000
8 1 0.000000 0.000000 1.480000
1 1 0.895669 0.000000 1.796667
1 1 0.447834 -0.775672 -0.316667
Arquivo de saida:
**********************************************************************
PROGRAMA PARA LOCALIZACAO DE GRUPO PONTUAL MOLECULAR
Autor: Otavio Beruski
*********************************************************************
Numero de Atomos: 4
# Simbolo Z Massa isotopica (uma) Coordenadas x y z (angstrom)
1 O 8 15.994915 ( 0.000000 0.000000 0.000000 )
2 O 8 15.994915 ( 0.000000 0.000000 1.480000 )
3 H 1 1.007825 ( 0.895669 0.000000 1.796667 )
4 H 1 1.007825 ( 0.447834 -0.775672 -0.316667 )
Matriz de Distancias (angstrom)
A EXEMPLOS DO SOFTWARE 73
1 2 3 4
1 0.000000 1.480000 2.007545 0.950000
2 1.480000 0.000000 0.950000 2.007544
3 2.007545 0.950000 0.000000 2.295300
4 0.950000 2.007544 2.295300 0.000000
Existem 2 conjuntos de atomos simetricamente equivalentes (ASE).
# conjunto Atomos presentes
1 1 2
2 3 4
Coordenadas x,y,z do Centro de Massa (angstrom)
(0.039818 -0.022989 0.740000)
Coordenadas do sistema com o Centro de Massa na origem:
1 O 8 ( -0.039818 0.022989 -0.740000 )
2 O 8 ( -0.039818 0.022989 0.740000 )
3 H 1 ( 0.855851 0.022989 1.056667 )
4 H 1 ( 0.408016 -0.752683 -1.056667 )
Tensor de Inercia (uma*A**2)
20.356599 0.318963 -0.476915
0.318963 20.724906 -0.826041
-0.476915 -0.826041 1.545115
Momentos Principais de Inercia (uma*A**2)
Ia = 1.498245, Ib = 20.172445, Ic = 20.955930
Simetria Rotacional: Piao Assimetrico.
Coordenadas do sistema com os eixos de inercia
coincidentes com os eixos cartesianos:
1 O 8 ( -0.045977 0.036319 -0.739108 )
2 O 8 ( -0.045977 -0.036319 0.739108 )
3 H 1 ( 0.729695 0.395434 1.077373 )
4 H 1 ( 0.729694 -0.395434 -1.077373 )
Eixo de Rotacao de maior ordem: C2 em x.
C2 Perpendicular? -> Nao
S4? -> Nao
S2? -> Nao

A EXEMPLOS DO SOFTWARE 74
Reflexao? -> Nao
Grupo Pontual: C2.
A.7 Tetrametilsilano
Figura 32: Molécula de Tetrametilsilano.
Arquivo de entrada:
17
14 1 0.000000 0.000000 0.000000
6 1 0.000000 0.000000 1.850000
6 1 1.744199 0.000000 -0.616660
6 1 -0.872098 -1.510519 -0.616667
6 1 -0.872098 1.510519 -0.616667
1 1 -0.358739 2.399683 -0.253667
1 1 -1.898818 1.510517 -0.253670
1 1 -0.872098 1.510519 -1.705667
1 1 -0.358739 -2.399683 -0.253667
1 1 -0.872098 -1.510519 -1.705667
1 1 -1.898818 -1.510517 -0.253670
1 1 0.513360 -0.889165 2.213000
1 1 0.513360 0.889165 2.213000
1 1 -1.026719 0.000000 2.213000
1 1 2.257557 -0.889165 -0.253659
1 1 2.257557 0.889165 -0.253659
1 1 1.744203 0.000000 -1.705660
Arquivo de saida:
**********************************************************************
PROGRAMA PARA LOCALIZACAO DE GRUPO PONTUAL MOLECULAR
Autor: Otavio Beruski
*********************************************************************

A EXEMPLOS DO SOFTWARE 75
Numero de Atomos: 17
# Simbolo Z Massa isotopica (uma) Coordenadas x y z (angstrom)
1 Si 14 27.976927 ( 0.000000 0.000000 0.000000 )
2 C 6 12.000000 ( 0.000000 0.000000 1.850000 )
3 C 6 12.000000 ( 1.744199 0.000000 -0.616660 )
4 C 6 12.000000 ( -0.872098 -1.510519 -0.616667 )
5 C 6 12.000000 ( -0.872098 1.510519 -0.616667 )
6 H 1 1.007825 ( -0.358739 2.399683 -0.253667 )
7 H 1 1.007825 ( -1.898818 1.510517 -0.253670 )
8 H 1 1.007825 ( -0.872098 1.510519 -1.705667 )
9 H 1 1.007825 ( -0.358739 -2.399683 -0.253667 )
10 H 1 1.007825 ( -0.872098 -1.510519 -1.705667 )
11 H 1 1.007825 ( -1.898818 -1.510517 -0.253670 )
12 H 1 1.007825 ( 0.513360 -0.889165 2.213000 )
13 H 1 1.007825 ( 0.513360 0.889165 2.213000 )
14 H 1 1.007825 ( -1.026719 0.000000 2.213000 )
15 H 1 1.007825 ( 2.257557 -0.889165 -0.253659 )
16 H 1 1.007825 ( 2.257557 0.889165 -0.253659 )
17 H 1 1.007825 ( 1.744203 0.000000 -1.705660 )
Matriz de Distancias (angstrom)
1 2 3 4 5 6 7 8
1 0.000000 1.850000 1.850000 1.850000 1.850000 2.439574 2.439574 2.439574
2 1.850000 0.000000 3.021033 3.021038 3.021038 3.211322 3.211324 3.960428
3 1.850000 3.021033 0.000000 3.021039 3.021039 3.211322 3.960429 3.211326
4 1.850000 3.021038 3.021039 0.000000 3.021038 3.960428 3.211320 3.211322
5 1.850000 3.021038 3.021039 3.021038 0.000000 1.088999 1.089000 1.089000
6 2.439574 3.211322 3.211322 3.960428 1.088999 0.000000 1.778331 1.778329
7 2.439574 3.211324 3.960429 3.211320 1.089000 1.778331 0.000000 1.778328
8 2.439574 3.960428 3.211326 3.211322 1.089000 1.778329 1.778328 0.000000
9 2.439574 3.211322 3.211322 1.088999 3.960428 4.799366 4.202560 4.202561
10 2.439574 3.960428 3.211326 1.089000 3.211322 4.202561 3.505582 3.021038
11 2.439574 3.211324 3.960429 1.089000 3.211320 4.202560 3.021034 3.505582
12 2.439574 1.089000 3.211317 3.211322 3.960428 4.202562 4.202563 4.799367
13 2.439574 1.089000 3.211317 3.960428 3.211322 3.021037 3.505587 4.202562
14 2.439574 1.089000 3.960425 3.211322 3.211322 3.505584 3.021039 4.202562
15 2.439574 3.211317 1.089000 3.211323 3.960429 4.202562 4.799367 4.202565
16 2.439574 3.211317 1.089000 3.960429 3.211323 3.021038 4.202562 3.505588
17 2.439574 3.960424 1.089000 3.211324 3.211324 3.505585 4.202563 3.021043
9 10 11 12 13 14 15 16
1 2.439574 2.439574 2.439574 2.439574 2.439574 2.439574 2.439574 2.439574
2 3.211322 3.960428 3.211324 1.089000 1.089000 1.089000 3.211317 3.211317
3 3.211322 3.211326 3.960429 3.211317 3.211317 3.960425 1.089000 1.089000
4 1.088999 1.089000 1.089000 3.211322 3.960428 3.211322 3.211323 3.960429
5 3.960428 3.211322 3.211320 3.960428 3.211322 3.211322 3.960429 3.211323

A EXEMPLOS DO SOFTWARE 76
6 4.799366 4.202561 4.202560 4.202562 3.021037 3.505584 4.202562 3.021038
7 4.202560 3.505582 3.021034 4.202563 3.505587 3.021039 4.799367 4.202562
8 4.202561 3.021038 3.505582 4.799367 4.202562 4.202562 4.202565 3.505588
9 0.000000 1.778329 1.778331 3.021037 4.202562 3.505584 3.021038 4.202562
10 1.778329 0.000000 1.778328 4.202562 4.799367 4.202562 3.505588 4.202565
11 1.778331 1.778328 0.000000 3.505587 4.202563 3.021039 4.202562 4.799367
12 3.021037 4.202562 3.505587 0.000000 1.778330 1.778330 3.021031 3.505579
13 4.202562 4.799367 4.202563 1.778330 0.000000 1.778330 3.505579 3.021031
14 3.505584 4.202562 3.021039 1.778330 1.778330 0.000000 4.202558 4.202558
15 3.021038 3.505588 4.202562 3.021031 3.505579 4.202558 0.000000 1.778330
16 4.202562 4.202565 4.799367 3.505579 3.021031 4.202558 1.778330 0.000000
17 3.505585 3.021043 4.202563 4.202557 4.202557 4.799365 1.778329 1.778329
17
1 2.439574
2 3.960424
3 1.089000
4 3.211324
5 3.211324
6 3.505585
7 4.202563
8 3.021043
9 3.505585
10 3.021043
11 4.202563
12 4.202557
13 4.202557
14 4.799365
15 1.778329
16 1.778329
17 0.000000
Existem 3 conjuntos de atomos simetricamente equivalentes (ASE).
# conjunto Atomos presentes
1 1
2 2 3 4 5
3 6 7 8 9 10 11 12 13 14 15 16 17
Coordenadas x,y,z do Centro de Massa (angstrom)
(0.000001 -0.000000 0.000001)
Coordenadas do sistema com o Centro de Massa na origem:
1 Si 14 ( -0.000001 0.000000 -0.000001 )
2 C 6 ( -0.000001 0.000000 1.849999 )
3 C 6 ( 1.744198 0.000000 -0.616661 )
4 C 6 ( -0.872099 -1.510519 -0.616668 )

A EXEMPLOS DO SOFTWARE 77
5 C 6 ( -0.872099 1.510519 -0.616668 )
6 H 1 ( -0.358740 2.399683 -0.253668 )
7 H 1 ( -1.898819 1.510517 -0.253671 )
8 H 1 ( -0.872099 1.510519 -1.705668 )
9 H 1 ( -0.358740 -2.399683 -0.253668 )
10 H 1 ( -0.872099 -1.510519 -1.705668 )
11 H 1 ( -1.898819 -1.510517 -0.253671 )
12 H 1 ( 0.513359 -0.889165 2.212999 )
13 H 1 ( 0.513359 0.889165 2.212999 )
14 H 1 ( -1.026720 0.000000 2.212999 )
15 H 1 ( 2.257556 -0.889165 -0.253660 )
16 H 1 ( 2.257556 0.889165 -0.253660 )
17 H 1 ( 1.744202 0.000000 -1.705661 )
Tensor de Inercia (uma*A**2)
157.504634 -0.000000 -0.000175
-0.000000 157.504734 0.000000
-0.000175 0.000000 157.504861
Momentos Principais de Inercia (uma*A**2)
Ia = 157.504539, Ib = 157.504734, Ic = 157.504955
Simetria Rotacional: Piao Esferico.
Coordenadas do sistema com os eixos de inercia
coincidentes com os eixos cartesianos:
1 Si 14 ( -0.000001 0.000000 -0.000001 )
2 C 6 ( 0.883080 0.000000 1.625628 )
3 C 6 ( 1.238301 0.000000 -1.374449 )
4 C 6 ( -1.060690 -1.510519 -0.125589 )
5 C 6 ( -1.060690 1.510519 -0.125589 )
6 H 1 ( -0.436317 2.399683 -0.051661 )
7 H 1 ( -1.789614 1.510517 0.683479 )
8 H 1 ( -1.580514 1.510519 -1.082513 )
9 H 1 ( -0.436317 -2.399683 -0.051661 )
10 H 1 ( -1.580514 -1.510519 -1.082513 )
11 H 1 ( -1.789614 -1.510517 0.683479 )
12 H 1 ( 1.507454 -0.889165 1.699554 )
13 H 1 ( 1.507454 0.889165 1.699554 )
14 H 1 ( 0.154159 0.000000 2.434698 )
15 H 1 ( 1.862673 -0.889165 -1.300521 )
16 H 1 ( 1.862673 0.889165 -1.300521 )
17 H 1 ( 0.718480 0.000000 -2.331375 )
Grupo Pontual: Td.