Embed Size (px)
Citation preview

ENG 1714 – Métodos Numéricos para
Engenharia Mecânica
http://lmmp.mec.puc-rio.br/eng1714/
0 100 200 300 400 500 600 700
0
100
200
300
400
500
600
700
nz = 20566

ENG 1714 – Métodos Numéricos para
Engenharia Mecânica
http://lmmp.mec.puc-rio.br/eng1714/
Professor: Márcio Carvalho, Sala 153-L, Tel: 3527-1174 ou 3527-2530. email: [email protected]
Horário: 3a: 15:00 – 17:00 – Sala 258L
5a: 15:00 – 17:00 – Sala 258L
Atendimento: O aluno deve me procurar sempre que tiver alguma dúvida.
Critério de Aprovação: 54
231,32 Se .5
5
2312
GGMG
GGM . G1 e G2 são
calculados da seguinte forma:
PGP
PListasMediaGP
,4 Se
2,4 Se
Objetivo: Introduzir os conceitos básicos de métodos numéricos para solução de problemas em engenharia.
Ementa: Introdução; Integração numérica; Cálculo de raiz de equação transcendental; Interpolação e Ajuste
de Curvas; Solução de sistemas de equações algébricos; Sistemas não-lineares; Equações Diferenciais
Ordinárias; Problema de Valor Inicial; Problema de Valor de Contorno; Equações Diferenciais Parciais;
Otimização.
Bibliografia:
Métodos Numéricos para Engenharia ,S. C. Chapra e R. P. Canale; McGraw Hill, 2002.
Análise Numérica, R. L. Burden e J. Douglas Faires, Thomson, 2003.
Numerical Recipies, W. H. Press, B. P. Flannery, S. A. Teukolsky e W. T. Vetterling; Cambridge
University Press, 1986.
Numerical Methods, G. Dahlquist, A. Bjorck e N. Anderson; Prentice Hall, 1974.
Manual do Scilab

ENG 1714- Métodos Numéricos para Eng. Mecânica
Departamento de Engenharia Mecânica
Prof. Marcio S. Carvalho
email: [email protected]: 153-L
Tel: 3527-1174 ou 3527-2530
APLICAÇÕES DE MÉTODOS NUMÉRICOS
Tratamento de Dados Estatísticos
Análise de sinaisCálcular de média, desvio padrão, variância, etc…Determinar equação da curva que melhor descreve os
resultados de um experimento
Simulação de sistemas
Previsão de comportamento de um sistemaProjeto mais barato e de melhor desempenhoVerificação
? )(xfy
INTRODUÇÃO

MODELAGEM E SIMULAÇÃO
PROBLEMA REAL
MODELO FÍSICO
MODELO MATEMÁTICO MODELO EXPERIMENTAL
MÉTODOS NUMÉRICOS
PREVISÕES
TÉCNICAS EXPERIMENTAIS
PREVISÕES
MODELO MATEMÁTICO
Conjunto de equações que descrevem um determinado fenômeno físico
Modelo é desenvolvido a partir de hipóteses simplificadoras
Hipóteses simplificadoras são importantes para facitilar a soluçãoHipóteses devem ser coerentes com o fenômeno a ser descritoEngenharia: Uso correto de hipóteses simplificadorasHipóteses erradas levarão a predições incorretas
Qualidade das predições está diretamente ligada ao modelo usado
Compromisso entre custo para solução das equações e qualidade dos resultados
Modelo pode ser DIFERENCIAL ou INTEGRAL
Modelos diferenciais geralmente levam a equações sem solução analítica
Necessidade de desenvolvimento de ferramentas para resolver as equações

IMPORTÂNCIA DE PREDIÇÃO
Projeto de engenharia mais econômico
Otimização de projetos
Análise de situações sem dados experimentais
Determinação de desempenho em casos limites
MÉTODOS DE PREDIÇÃO
Modelo Experimental
Em escala ou escala reduzidaCusto financeiro e de tempo elevadoDifícil de analisar efeitos de condições isoladasFundamental para validar modelos teóricos
Modelo Matemático
Baixo custoPossibilidade de analisar diversos casos e otimizar projetoVelocidade de obter respostaHabilidade de simular condições reais e ideaisNecessidade de validar modelos matemáticos
Comentários
Ideal: Combinação de experimentos e modelos matemáticos

MÉTODOS NUMÉRICOS
EQUAÇÃO DIFERENCIAL )()( xGdx
dTTk
dx
d
MODELO: CONSERVAÇÃO DE ENERGIA + LEI DE FOURIER
PROBLEMA REAL: TRANSFERÊNCIA DE CALOR
?)( xT
DETERMINAR TEMPERATURA APENAS EM ALGUNS PONTOS DO DOMÍNIO
DISCRETIZAR O PROBLEMA
EQUAÇÃO DIFERENCIAL EQUAÇÃO ALGÉBRICA
DIFERENTES MÉTODOS NUMÉRICOS
DIFERENÇAS FINITAS
ELEMENTOS FINITOS
VOLUMES FINITOS
ELEMENTOS DE CONTORNO
ELEMENTOS ESPECTRAIS
OUTROS ...

ESCOLHA DE SOFTWARE
Softwares comerciais para diferentes aplicações
Análise estrutural: ANSYS, ADINA, ...Escoamento de Fluidos: FLUENT, FIDAP, FLOW3D, ...Fenômenos de Transferência: FLUENT, ...
Softwares comerciais ou desenvolvidos
Versatilidade X desempenhoDesenvolvidos: Novos modelosComerciais: Mais “userfriendly”, interface gráfica
Treinamento
Fundamentos físicosUso do software
EMENTA
Cálculo de raiz de equação
Interpolação e ajuste de curva
Integração numérica
Solução de sistema de equações algébricas
Solução de sistema não-linear
Descrição matemática de fenômenos físicos
Equação diferencial ordinária - Problema de Valor de Contorno
Problema de Valor Inicial
Equação diferencial parcial
Método de diferenças finitas, elementos finitos e volumes finitos
Otimização

INTRODUÇÃO ao MATLAB
Software e linguagem e ambiente de programação para cálculos matemáticos
MATLAB = Matrix Laboratory
Possui diversas rotinas de cálculo matemático já programadas e testadas
Possibilidade de criar programas e novas rotinas de acordo coma necessidade do usuário
Instalação:
http://www.mec.puc-rio.br/downloads/MATLAB_Roteiro_Download_Instalacao_Aluno.pdf
JANELA DE COMANDO - COMMAND WINDOW
Janela principal. Modo como o usuário se comunica com o progama MATLAB
Os comandos e chamadas de programa são dados no prompt da janela
JANELA DE COMANDO - COMMAND WINDOW
Janela de comando
Diretorio de trabalho
Janela de variaveis

VARIÁVEL TIPO VETOR - ARRAY
CRIAÇÃO DE GRÁFICOS

JANELA DE PROGRAMAÇÃO / EDIÇÃO
Criar uma nova janela de programação
Edição do programa. O arquivo deve ser salvo como *.m
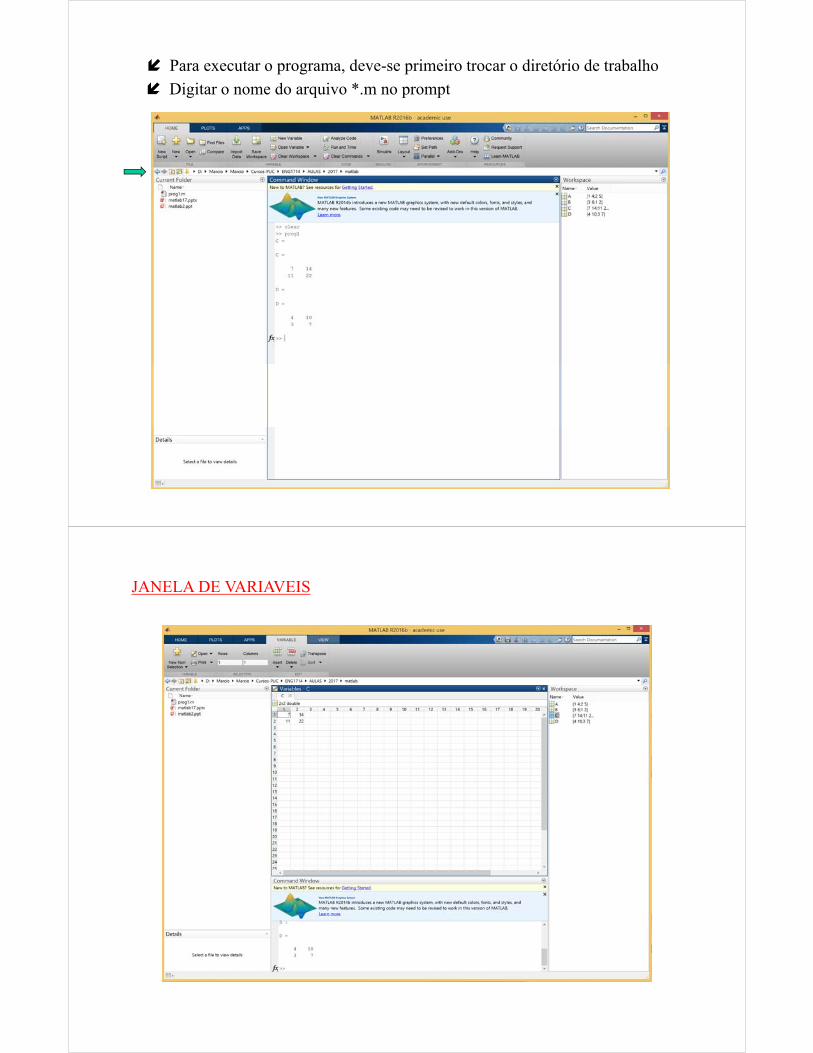
Para executar o programa, deve-se primeiro trocar o diretório de trabalho
Digitar o nome do arquivo *.m no prompt
JANELA DE VARIAVEIS

Principais comandos para gerenciamento da sessão
Comando Descriçãocasesen Controla a sensitividade de caracteres maiúsculos e minúsculosclc Limpa a janela de comandoclear Remove as variáveis da memóriawho Lista as variáveis correntes na memóriaquit Para a execução do MATLAB
Principais comandos do sistema e de controle de arquivos
Comando Descriçãocd diretorio Muda o diretório corrente para diretoriopwd Imprime o diretório correntedate Imprime a datadelete filename Remove o arquivo filenamedir Lista os arquivos presente no diretório correnteload Carrega todas as variáveis do arquivo matlab.matload filename Carrega todas as variáveis do arquivo filename.matsave Grava as variáveis da sessão no arquivo matlab.matsave filename Grava as variáveis da sessão no arquivo filename.mat
ESTRUTURAS DE PROGRAMAÇÃO
For
While

if / else
SCRIPT X FUNCTION
Script: Não trabalha com argumentos. Variáveis globais.Programa principal
Function: Trabalha com argumentos. Variáveis locais.Programa principal

Exercícios
1) Escreva um programa em MatLab para efetuar a multiplicação entre duas matrizes. O programa deve primeiro ler o número de linhas e colunas de cada matriz e o valor de cada entrada das matrizes. Antes de efetuar a operação, o programa deve verificar se a mesma é possível, i.e. se o número de colunas de uma matriz é igual ao número de linhas da outra.
02 cbxax2) Escreva um programa que calcule as raízes reais de um polinômio do 2o grau . O programa deve seguir os seguintes passos: (i) ler os coeficientes do polinômio; (ii) Calcular as raízes, tomando o cuidado para evitar divisão por zero e raízes complexas; (iii) Mostrar as soluções obtidas; (iv) Perguntar ao usuário se ele quer voltar ao passo (i).


AJUSTE DE CURVAS E INTERPOLAÇÃO
Conhecendo-se os valores de uma função em pontos discretos de um intervalo,deseja-se determinar uma curva que “represente” esta função neste intervalo.
f1*(x)
xAPLICAÇÕES
f2*(x)
Ajuste de dados experimentais - Estes carregam incertezas.Ajuste dos dados de acordo com um modelo – Esta abordagem permite a obtenção de parâmetros que possuam interpretação física. Ex. f1(x): .Necessidade de integração da função em questão.Desejo de se conhecer o valor da função em pontos específicos não dados.Aproximar uma função por outra menos complexa, de fácil aplicação.
x
OBJETIVO
TIPOS DE PROCESSOS
Tem-se um conjunto de pontos e deseja-se obter uma curva que passe suavemente através de todos os pontos. A equação da curva interpoladora deve possuir omesmo número de parâmetros que o número de pontos dados.
Tem-se um conjunto de pontos e deseja-se uma curva que passe “próxima” destes pontos. A equação da curva ajustada deve possuir um número de parâmetros menor que o número de pontos dados.
INTERPOLAÇÃO PADRÃO
AJUSTE DE CURVAS
f*AC(x)
x
Dados n pontos xi, f(xi) no intervalo (a,b) obtém-se f*(x) tal que | f*(xi)-f(xi) |<
f*IP(x)
x
Dados n pontos xi, f(xi) no intervalo (a,b) obtém-se f*(x) tal que f*(xi)=f(xi)
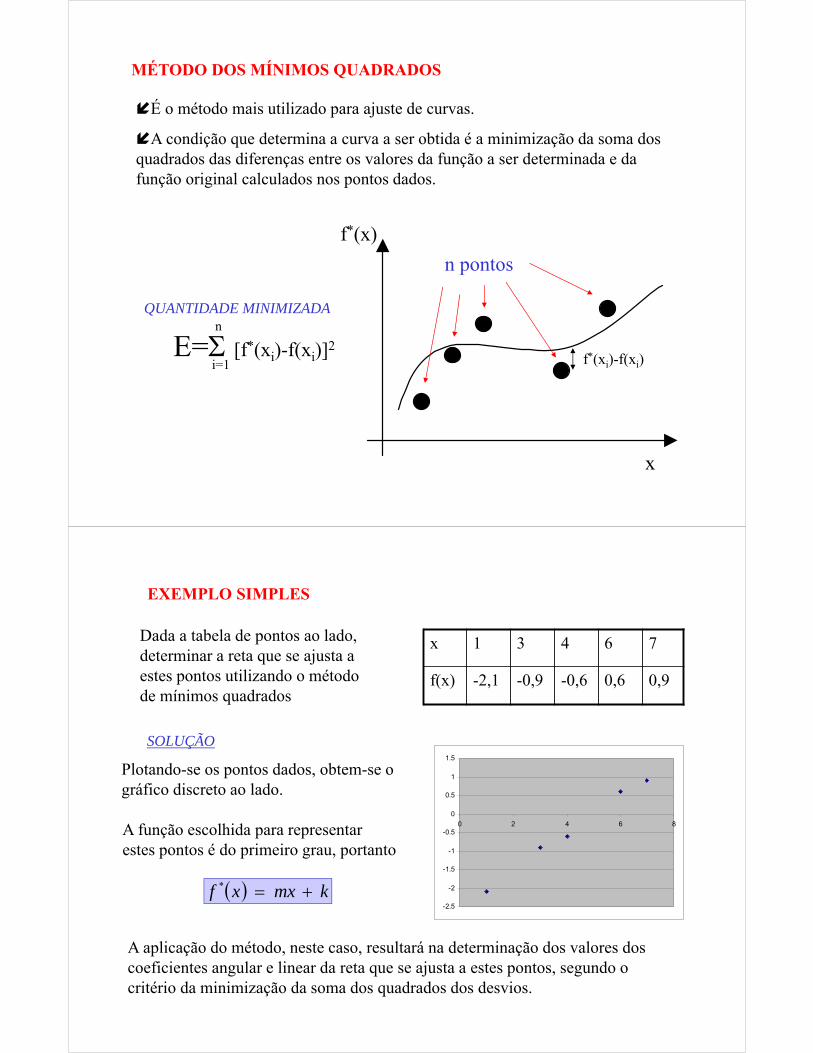
MÉTODO DOS MÍNIMOS QUADRADOS
É o método mais utilizado para ajuste de curvas.
A condição que determina a curva a ser obtida é a minimização da soma dos quadrados das diferenças entre os valores da função a ser determinada e da função original calculados nos pontos dados.
E= [f*(xi)-f(xi)]2
i=1
n
f*(x)
x
n pontos
f*(xi)-f(xi)
QUANTIDADE MINIMIZADA
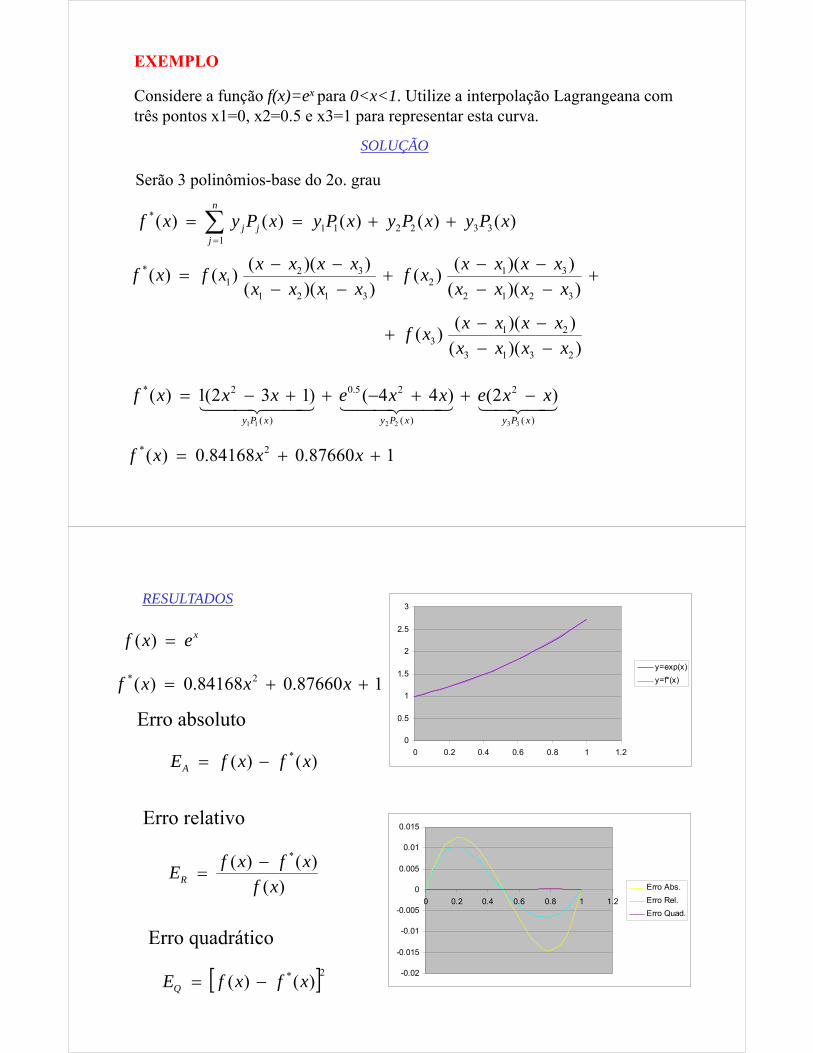
EXEMPLO SIMPLES
x 1 3 4 6 7
f(x) -2,1 -0,9 -0,6 0,6 0,9
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
0 2 4 6 8
Dada a tabela de pontos ao lado, determinar a reta que se ajusta a estes pontos utilizando o método de mínimos quadrados
SOLUÇÃO
Plotando-se os pontos dados, obtem-se o gráfico discreto ao lado.
A função escolhida para representar estes pontos é do primeiro grau, portanto
A aplicação do método, neste caso, resultará na determinação dos valores dos coeficientes angular e linear da reta que se ajusta a estes pontos, segundo o critério da minimização da soma dos quadrados dos desvios.
kmxxf *

Pode-se perceber que a grandeza a ser minimizada, com o procedimento adotado, é escrita como uma função dos coeficientes.
0205
1
i
iii xxfkmx
m
E
5
1
2
1
2*
iii
n
iii xfkmxxfxfE
CÁLCULO DA SOMA DO QUADRADO DOS DESVIOS
A escolha dos coeficientes que minimizam E deve, portanto, ser tal que:
kmEE ,
0205
1
iii xfkmx
k
E
m e k são raizes do sistema de equações.
i xi f(xi) xi2 xi*f(xi)1 1 -2.1 1 -2.12 3 -0.9 9 -2.73 4 -0.6 16 -2.44 6 0.6 36 3.65 7 0.9 49 6.3
sum 21 -2.1 111 2.7
57.6 -290 0.505 -2.54114
05
1
5
1
25
1
iiiiiiixfxxkxm
015
5
1
5
5
1
5
1
iii
ii
xfxm
5
1
5
15
1
5
1
5
1
2
5i
i
iii
ii
ii
ii
xf
xfx
k
m
x
xx
1.2
7.2
11121
215
215111
1
1.2
7.2
521
211112k
m
k
m
542.2
505.0
k
m

-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
0 2 4 6 8
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
0 2 4 6 8
Erro Abs. Erro Rel. Erro Quad.
CÁLCULO DO ERRO
Erro absoluto
)()( *iiA xfxfE
Erro relativo
)(
)()( *
i
iiR xf
xfxfE
Erro quadrático
2* )()( iiQ xfxfE
CASO MAIS GERAL
)()()()()( 22111
* xcxcxcxcxf mm
m
jjj
Para um caso mais geral, onde a função de ajuste é formada por uma combinação linear de funções linearmente independentes, tem-se:
n
iii xfxfE
1
2*
Exemplos:
000
2* )()1(
c
E
b
E
a
E
cbxaxxf
00
* cos)()2(
B
E
A
E
xBxsenAxf
0
jc
E
Nestes problemas, recai-se em um sistema de m equações (derivando-se E em relação a cada coeficiente) e mincógnitas (os coeficientes)
m equações
m incógnitas
00
*** )(lnln)](ln[)()3(
nE
KE
n nxKxfznKzgKzzg

n
iii xfxfE
1
2*
m
kkk
m
jjj xcxcxf
11
* )()()(
Coeficientes a serem determinados.j e k são índices mudos.
Sistema de equações (m equações):
0)()()(2,...,1;0 *
1
)(
1
*
i
j
n
ii
xf
m
kikk
j
xfc
xfxcmjc
E
i
)()()(1
*ij
m
kikk
ji
j
xxcc
xfc
Observe que...
)()(...)()()()( 2332211212
iimmiii
m
kikk xxcxcxcxc
cxc
c
0)()()(01 1
ij
n
ii
m
kikk
j
xxfxcc
E
n
iiji
n
i
m
kijikk
n
iiji
m
kikkij
j
mjxxfxxc
xxfxcxc
E
11 1
1 1
,...,2,1;)()()(
0)()()(
n
iiji
n
k
m
iijikk xxfxxc
11 1
;)()()(
mjxxfxxcn
iiji
n
k
m
iijikk ,,2,1;)()()(
11 1

n
iimi
n
iii
n
iii
mn
iim
n
iimi
n
iimi
n
iimi
n
ii
n
iii
n
iimi
n
iii
n
ii
xxf
xxf
xxf
c
c
c
xxxxx
xxxxx
xxxxx
1
12
11
2
1
1
2
12
11
12
1
22
121
11
121
1
21
)()(
)()(
)()(
)()()()()(
)()()()()(
)()()()()(
Para cada coeficiente existe uma equação correspondente, por exemplo, j=1:
0)()()()()()()(1
11
11
211
22
111
n
iii
n
iimim
n
iii
n
ii xxfxxcxxcxc
c
E
Colocando o sistema de equações na forma matricial tem-se:
mjxxfxxcn
iiji
n
k
m
iijikk ,,2,1;)()()(
11 1
EXEMPLOSx 1.1 2.3 3.0 4.3 5.1 6
F(x) 1.1 1.9 3.4 4.8 5.5 6.9Considere os dados:
b
ii
iii
A
ii
ii
ii
xf
xfx
k
m
x
xx
6
1
6
16
1
6
1
6
1
2
6
Determine a reta que melhor represente os dados usando o método dos mínimos quadrados.
x F(x) X^2 x F1 1.1 1.1 1.21 1.212 2.3 1.9 5.29 4.373 3 3.4 9 10.24 4.3 4.8 18.49 20.645 5.1 5.5 26.01 28.056 6 6.9 36 41.4
Soma = 21.8 23.6 96 105.87
4205.01983.16.23
87.105
68.21
8.2196
kem
k
m
kmxxf *

Determine a parábola que melhor represente os dados usando o método dos mínimos quadrados.
cbxaxxf 2*
Sistema de equações:
020
020
020
6
1
2
6
1
2
26
1
2
iiii
ii
iii
ii
iii
xfcbxaxc
E
xxfcbxaxb
E
xxfcbxaxa
E
6
1
6
1
6
1
6
1
2
6
1
6
1
6
1
6
1
23
6
1
6
1
26
1
26
1
34
10
0
0
i ii
iiii
i iii
ii
iii
i iii
ii
iii
xfcxbxac
E
xxfxcxbxab
E
xxfxcxbxaa
E
6
1
6
1
6
1
2
6
1
6
1
2
6
1
6
1
26
1
3
6
1
26
1
36
1
4
6i
i
iii
iii
ii
ii
ii
ii
ii
ii
ii
ii
xf
xfx
xfx
c
b
a
xx
xxx
xxx
1339.0;9924.0;0288.0
6.23
87.105
19.522
68.2196
8.219666.468
9666.46885.2424
cba
c
b
a
x F(x) x^4 x^3 X^2 x^2 F x F1 1.1 1.1 1.46 1.33 1.21 1.33 1.212 2.3 1.9 27.98 12.17 5.29 10.05 4.373 3 3.4 81.00 27.00 9.00 30.60 10.204 4.3 4.8 341.88 79.51 18.49 88.75 20.645 5.1 5.5 676.52 132.65 26.01 143.06 28.056 6 6.9 1296.00 216.00 36.00 248.40 41.40
Soma = 21.8 23.6 2424.85 468.66 96.00 522.19 105.87

0
1
2
3
4
5
6
7
8
0 1 2 3 4 5 6 7
Dados
Ajuste Linear
Ajuste Quadratico
x F(x) Ajuste Equad1.1 1.1 0.90 0.0412.3 1.9 2.34 0.190
3 3.4 3.17 0.0514.3 4.8 4.73 0.0055.1 5.5 5.69 0.036
6 6.9 6.77 0.017
E = 0.340
x F(x) Ajuste Equad1.1 1.1 0.99 0.0122.3 1.9 2.30 0.161
3 3.4 3.10 0.0894.3 4.8 4.67 0.0185.1 5.5 5.68 0.031
6 6.9 6.86 0.002
E = 0.312
Linear Quadrático
INTERPOLAÇÃO LAGRANGEANA
É um caso particular importante de interpolação, ou seja, de se obter uma curva que passe pelos pontos dados.
Dados n pontos xi, f(xi) no intervalo (a,b) obtem-se f*(x) tal que f*(xi)=f(xi)
A função interpoladora é polinomial e de grau mínimo possível (n-1)
O polinômio interpolador de grau n-1 é formado por uma combinação linear de n polinômios (polinômios-base) também de mesmo grau n-1.
Algumas características da Interpolação Lagrangeana são listadas a seguir:
Os coeficientes da combinação linear são os próprios valores da função original nos pontos dados e portanto os polinômios-base possuem valor unitário em um ponto e se anulam nos outros:
n
jjj xPcxf
1
* )()(
Polinômios de graus n-1o número de polinômios-base é igual ao de pontos
ijijjjj xPyxfc )()(*

EXEMPLO SIMPLES
Dados os pontos (2,2) e (3,3), determinar a reta que se ajusta a estes pontos utilizando o método da Interpolação Lagrangeana.
SOLUÇÃO
Como são dados dois pontos, (2,2) e (3,3), os n=2 polinômios-base são de grau n-1=1. Além disso, P1(x)=1, para o ponto (2,2) e P1(x)=0, para o ponto (3,3). Analogamente, P2(x)=0 para o ponto (2,2) e P2(x)=1, para o ponto (3,3).
xxxxf )2(3)3(2)(*
3)(1 xxP 2)(2 xxP
)(3)(2)()( 21
2
1
* xPxPxPyxfn
jjj
ijij xP )(
O polinômio interpolador de grau n-1 é formado por uma combinação linear de npolinômios (polinômios-base) também de mesmo grau n-1.
ijij xP )(
jjj yxfc )(*
n
jjj xPcxf
1
* )()( Deve-se impor a condição f*(xi)=f(xi)
Prova da ida (a volta é análoga)
n
jijjijj xPxfxfxfc
1
** )()()()(
m
kijikjk xx
1
)()(
OBS 3:
Logo, percebe-se que a condição nos coeficientes é também uma condição no tipo de polinômio que forma a base de funções ser satisfeita (de acordo com a OBS 3)
ijij xP )(
)()()()()()()()(1 1*
1*
122*
111*
1 xfxPxfxPxfxPxfxfi nn
0)(0)(1)( 11211 xPxPxP n
)()()()()()()()(2 2*
2*
222*
211*
2 xfxPxfxPxfxPxfxfi nn
0)(1)(0)( 22221 xPxPxP n
ijijjjj xPyxfc )()(*

ijij xP )(Exemplos de funções base polinomias que obedecem a condição:
Linear
ParabólicaP2
0
0.2
0.4
0.6
0.8
1
1.2
P1
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
P3
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
CúbicaP1
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
P2
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
P3
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
P4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
P1
0
0.2
0.4
0.6
0.8
1
1.2
P2
0
0.2
0.4
0.6
0.8
1
1.2
CÁCULO DOS POLINÔMIOS-BASE
Sabe-se que o polinômio base assume o valor unitário em um ponto e é nulo nos demais. Logo, estes demais pontos são raízes do polinômio. Portanto:
)())(())((
)())(())(()(
1121
1121
njjjjjjj
njjj xxxxxxxxxx
xxxxxxxxxxxP
n
jkk
kj
n
jii
i
j
xx
xx
xP
1
1
)(
n
jjj xPyxf
1
* )()(
FUNÇÃO INTERPOLADORA
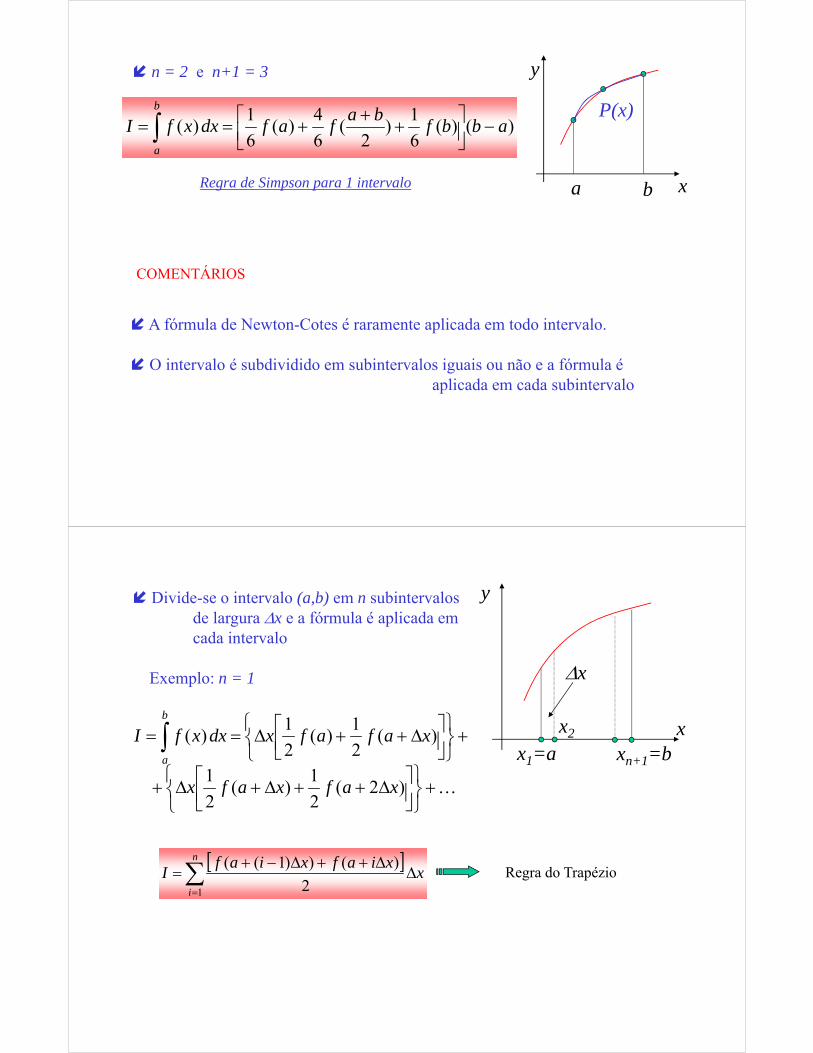
EXEMPLO
Considere a função f(x)=ex para 0<x<1. Utilize a interpolação Lagrangeana com três pontos x1=0, x2=0.5 e x3=1 para representar esta curva.
SOLUÇÃO
))((
))(()(
))((
))(()()(
3212
312
3121
321
*
xxxx
xxxxxf
xxxx
xxxxxfxf
))((
))(()(
2313
213 xxxx
xxxxxf
)(
2
)(
25.0
)(
2*
332211
)2()44()132(1)(xPyxPyxPy
xxexxexxxf
187660.084168.0)( 2* xxxf
)()()()()( 3322111
* xPyxPyxPyxPyxfn
jjj
Serão 3 polinômios-base do 2o. grau
xexf )(
187660.084168.0)( 2* xxxf
0
0.5
1
1.5
2
2.5
3
0 0.2 0.4 0.6 0.8 1 1.2
y=exp(x)
y=f*(x)
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0 0.2 0.4 0.6 0.8 1 1.2
Erro Abs.
Erro Rel.
Erro Quad.
RESULTADOS
Erro absoluto
)()( * xfxfEA
Erro relativo
)(
)()( *
xf
xfxfER
Erro quadrático
2* )()( xfxfEQ

O nível da água no Mar do Norte é determinado pelo movimento de maré conhecido como Maré M2, com um período de 12 horas. A variação do nível com o tempo pode ser descrita pela seguinte fórmula:
Exercício
horas em t ,12
2sin
12
2cos)( 210
tA
tAhtH
t 0 2 4 6 8 10 Horas
H(t) 1.0 1.6 1.4 0.6 0.2 0.8 metros
Determine os parâmetros da curva de variação de H(t), isto é , utilizando os dadosacima e o método dos mínimos quadrados.
210 , AeAh


INTEGRAÇÃO NUMÉRICA
Frequentemente cálculos integrais são necessários em engenharia
b
a
dxxfI )(
Na maioria dos casos, a integral não pode ser calculada analiticamente
x
y
a b
x
I = Área sob o gráfico
4
1
4
1
)(])1([
)3()2()()(
ii
i
xxfxxiafI
xxafxxafxxafxafI
Primeira idéia
x
y
a b
x
Melhor aproximação
Usar os pontos no meio do intervalo
4
1 21
4
1
)(2
)())1((
2
)4()3(
2
)3()2(
2
)2()(
2
)()(
ii
i
xxfxxiaxia
fI
xxaxa
fxxaxa
f
xxaxa
fxxaa
fI
4 intervalos5 pontosRegra do Retângulo

x
y
a b
x
Melhor aproximação
Intepolação linear em cada intervalo4 intervalos5 pontosRegra do Trapézio
4
1 2
)())1((
)4(2
1)3()2()()(
2
12
)4()3(
2
)3()2(2
)2()(
2
)()(
i
xxiafxiaf
I
xafxafxafxafafxI
xxafxaf
xxafxaf
xxafxaf
xxafaf
I
x
y
x1=a xn+1=b
x
x2
De uma forma geral, a integral é calculada poruma soma ponderada dos valores do integrandoem pontos do intervalo de integração
n
iii
b
a
xfwxfI1
)()(
n : número de intervalosn+1: número de pontos
wi são chamados de PESO e os pontos xi onde a função deve ser avaliada são chamados de ABSCISSA
As diferentes fórmulas de integração numérica são escolhas particulares dos pesos e abscissas
Todo fórmula de quadratura deve tender a integral exata quando o número de pontos torna-se muito grande

Geralmente usa-se abscissas igualmente espaçadas e escolhe-sepesos para obter a melhor aproximação
O resultado pode ser sistematicamente melhorado dividindo o intervalo ao meio
A precisão do método pode ser avaliada calculando-se a integral com n pontose repetindo-se o processo com 2n pontos. Se os resultados coincidiremdentro de uma certa tolerância, aceita-se o resultado como preciso
O erro na aproximação é sempre proporcional ao tamanho do intervalo elevado a alguma potência inteira
mm hxerro m: ordem da aproximação
FÓRMULA DE NEWTON-COTES
Divide-se o domínio em n intervalos com n+1 pontos
1,,2,1 para,)1(;
njhjaxn
abh j
Define-se polinômio de interpolação de grau n pelos pontos (xj, f(xj))
1
1
)()()(n
kkk xLxfxP
Polinômio interpolador de Lagrange
A integral da função é aproximada pela integral do polinômio interpolador
1
1
1
1
1
1
)()()(
)()()()(
n
kkk
n
k
b
a
kk
b
a
n
kkk
b
a
b
a
wxfdxxLxf
dxxLxfdxxPdxxfI

EXEMPLOS DA FÓRMULA DE NEWTON-COTES
n = 1 e n+1 = 2
x
y
a b
P(x)
)(
)()( e
)(
)()( onde
)()()(
12
12
21
21
2
1
xx
xxxL
xx
xxxL
xLxfxPk
kk
a ba b
)(1 xL )(2 xL1
22)(
)()(
22)(
)()(
12
12
122
12
21
211
abxxdx
xx
xxdxxLw
abxxdx
xx
xxdxxLw
b
a
b
a
b
a
b
a
b
a
abbfaf
dxxfI )(2
)()()(
Regra do Trapézio para 1 intervalo
De uma forma geral o método de Newton-Cotes pode ser escrito como:
1
1
1
1
)()(
)()()()(
n
kk
nk
n
k
b
a
kk
b
a
b
a
xfCab
dxxLxfdxxPdxxfI
b
a
knk dxxL
abC )(
)(
1 Cotes-Newton de escoeficient
n C1n C2
n C3n C4
n C5n
1 1/2 1/2
2 1/6 4/6 1/6
3 1/8 3/8 3/8 1/8
4 7/90 32/90 12/90 32/90 7/90
Tabela de coeficientes de Newton-Cotes
n = 2 e n+1 = 3
b
a
abbfba
fafdxxfI )()(6
1)
2(
6
4)(
6
1)(
x
y
a b
P(x)
Regra de Simpson para 1 intervalo
A fórmula de Newton-Cotes é raramente aplicada em todo intervalo.
O intervalo é subdividido em subintervalos iguais ou não e a fórmula éaplicada em cada subintervalo
COMENTÁRIOS
x
y
x1=a xn+1=b
x
x2
Divide-se o intervalo (a,b) em n subintervalosde largura x e a fórmula é aplicada em cada intervalo
Exemplo: n = 1
)2(2
1)(
2
1
)(2
1)(
2
1)(
xafxafx
xafafxdxxfIb
a
n
i
xxiafxiaf
I1 2
)())1((Regra do Trapézio

Exemplo: n = 2
O número de intervalos deve ser par. A fórmula é aplicada a pares de intervalos
)4(6
1)3(
6
4)2(
6
12
)2(6
1)(
6
4)(
6
12)(
xafxafxafx
xafxafafxdxxfIb
a
2/
1
226
1)12(
6
4)1(2
6
1n
i
xxiafxiafxiafI
Regra de Simpson
0.001
0.01
0.1
1
10
0.1 1 10
y = 0.28889 * x^(1.923) R= 0.99844
Err
o %
Tamanho do Intevalo ( x)
2xErro
n Delta X Exata Trapezio Erro%
4 2.5 1.5 3.8 1.53
8 1.25 1.5 2.21 0.47
20 0.5 1.5 1.62 0.08
80 0.125 1.5 1.51 0.008

QUADRATURA GAUSSIANA
Máxima precisão para um dado número de funções
Intervalo não uniforme
b
a
n
iii xfwdxxf
1
)()(
Pontos de GaussPesos de Gauss
Os valores das coordenadas dos pontos de Gauss e os correpondentespesos são apresentados em tabelas padronizadas geralmentepara limites de integração de -1 a 1.
Para utilizar estas tabelas, é necessário fazer uma mudança de variável
b
a
n
iii gwdgdxxf
1
1
1
)()()(
wi1 -0.57735 1.002 +0.57735 1.00
wi1 -0.77459 0.555552 0.00 0.888883 +0.77459 0.55555
wi1 -0.86113 0.347852 -0.33998 0.652143 +0.33998 0.652144 +0.86113 0.34785
n = 2 n = 4
n = 3
Para integrais em duas, três ou mais variáveis:
n
ijij
n
ji
b
a
d
c
gww
ddgdxdyyxf
1 1
1
1
1
1
),(
),(),(

Exercício
Calcule a integral pelo Método do Trapézio:
Determine no número de intervalos necessários para obter uma resposta com precisão de 3 casas decimais
1
0
)5exp(3 dxx

N intervalos Integral
5 0.6448
10 0.6081
20 0.5990
40 0.5967
80 0.5961