Embed Size (px)
Citation preview

1
O SENSORIAMENTO REMOTO E SUAS TÉCNICAS DE ANÁLISE: UMA COMPARAÇÃO ENTRE NOVAS E VELHAS TECNOLOGIAS, UM ESTUDO DE
CASO SOBRE A TECNOLOGIA LIDAR (O MAPEAMENTO DE TERRITÓRIO ATRAVÉS DAS ÁRVORES)
Diogo Caio Rocha Amorim Departamento de Pós-Graduação Latu-Sensu - Geoprocessamento
Pontifícia Universidade Católica de Minas Gerais
Pollyanna Neves da Silva Departamento de Pós-Graduação Latu- Sensu - Consultoria e Licenciamento Ambiental
Centro Universitário – UNA
Resumo Facilitar a delimitação e o mapeamento de áreas urbanas e rurais, ainda acarreta um grande paradigma, pois são utilizadas técnicas antigas e lentas, tornando o processo oneroso, principalmente em áreas de florestas e vegetação densa. Este trabalho tem como objetivo apresentar as novas tecnologias para mapeamento sistemático dos alvos da Terra, utilizando a ciência do Sensoriamento Remoto, através do sistema de Detecção da energia emitida destes mesmos alvos e captada por um sistema aéreo embarcado, denominado LiDAR (Light Detection And Ranging). Palavras- chave: Sensoriamento Remoto. LiDAR. Mapeamento. Vegetação. Introdução Uma das tecnologias de grande importância no campo das geociências é o Sensoriamento
Remoto, que parte do princípio de poder manipular dados e imagens de determinados locais
à distância, sem precisar necessariamente ir ao campo. Esse instrumento não retira o mérito
e a importância do trabalho de campo no estudo de qualquer natureza cientifica. “O
Sensoriamento Remoto é uma tecnologia que permite a aquisição de informações sobre
objetos sem contato físico com eles” (NOVO, 1998, p1).
Para a aquisição das informações sobre os objetos ao redor da Terra, o Sensoriamento
Remoto, funciona utilizando as relações da energia eletromagnética que funciona obtendo
resultados da união entre objetos elétricos e o magnetismo, “energia eletromagnética é
emitida por qualquer corpo que possua temperatura acima de zero absoluto (0 zero

2
Kelvin).”(UFRGS,2009). Esta energia é medida através do seu comprimento de onda, que
em geral é muito curto, como é apresentado na figura a seguir:
Figura 1: Espectro Eletromagnético. Fonte: FIGUEIREDO (2005), citado por UFRGS, 2009.
A figura acima mostra a divisão dos comprimentos de ondas do espectro eletromagnético,
observa-se, que os comprimentos são em escala muito pequenas. O infravermelho próximo
(IV) é a onda que aparece logo após o comprimento do visível (aquele que podemos captar
com os olhos), sendo a utilizada pelo sistema LiDAR. O infravermelho próximo “é região
do espectro que se estende de 0,7 a 1000 µm e costuma ser dividida em três sub-regiões: IV
próximo: 0,7 a 1,3 µm, IV médio: 1,3 a 6 µm, IV distante: 6 a 1000 µm” (UFRGS, 2009).
Por se tratar de uma tecnologia, a mesma necessita de diversas técnicas de análise, tanto
recentes, como antigas, podendo calibrar mais acurácia (precisão de alcance) em sua
utilização, e obter resultados mais precisos e constantes.
Baseando-se nas tecnologias que envolvem o Sensoriamento Remoto é objetivo desse
trabalho identificar as principais características da técnica LiDAR para levantamentos
topográficos, modelos digitais de terreno, elevação e das técnicas antigas de topografia,
comparando a eficácia de ambas. O trabalho ainda visa levantar experiências e resultados
obtidos com ambas as técnicas, sempre destacando as vantagens e desvantagens.
Este estudo apresenta relevância, ao fato de aproximar a tecnologia LiDAR com o estudo
acadêmico, estudo este de grande importância no campo das geociências, principalmente
nas ciências geodésicas, pelo fato de obter-se maior precisão em levantamentos
topográficos. Uma vez que trabalhos como construção de barragens, ferrovias, estradas,

3
usinas hidrelétricas entre outros, necessitam de uma grande quantidade de matriz de
cálculos numéricos e quanto maior a precisão, mais confiabilidade é agregada aos projetos.
A tecnologia do mapeamento por laser scanner é pouco explorada em países em
desenvolvimento, devido ao seu alto custo. Porém o levantamento topográfico por
perfilamento a laser faz-se necessário, para a garantia de um trabalho bem detalhado,
evitando assim, problemas com cálculos a posteriores dos projetos.
A precisão é um fator extremamente importante em serviços de Engenharia e Cartografia,
os quais trabalham constantemente com a ciência Geodésica, propiciando inúmeros
cálculos, para a obtenção de sistemas de modelos em projetos diversos.
Uma vez necessitando de tanta precisão, essa tecnologia se integra com uma nova técnica,
que é o Escaneamento por Laser Aéreo (ALS-Airbone Laser Scanner), aqui chamado de
LIDAR (LIGHT DETECTION and RANGING), que funciona como um método para a
determinação de coordenadas tridimensionais de pontos na superfície da Terra. Seu
funcionamento baseia-se na utilização de um pulso de laser que é disparado na direção da
superfície. (CENTENO e MITISHITA, 2007, p1).
A técnica LIDAR como avanço para o sensoriamento remoto A União do Sensoriamento Remoto com o sistema LIDAR possibilita obter modelos
digitais de terreno (MDT), curvas de Nível, modelos digitais de Elevação (MDE), produzir
vídeos temáticos, entre outros trabalhos que necessitem de muita precisão. No contexto da utilização em sistemas de informações geográficas, por modelo digital de terreno designa-se qualquer conjunto de dados em suporte numérico que, para uma dada zona, permita associar a qualquer ponto definido sobre o plano cartográfico um valor correspondente à sua altitude (MATOS, 2001, p133).
Para Schafer e Loch (2005) "Através dos produtos oriundos do levantamento Laser scanner,
tem-se a possibilidade de gerar mapas tridimensionais acurados e atualizados para
otimização de projetos e processos de construção." Os MDT’s de alta resolução proveem
dados do terreno que podem servir como suporte a análise de características de interesse em
diversos projetos, como por exemplo, dos projetos rodoviários, atribuindo a eles
informações diversas como declividade, aspectos topográficos e outras características da
forma do relevo.
4
Um modelo digital de terreno (MDT) também conhecido como Digital Terrain Model - DTM representa a variação do relevo em uma região da superfície terrestre. A representação mais comum de um MDT está associada á altimetria, Embora possa representar outras grandezas que variam continuamente no espaço, por exemplo, unidades geológicas ou teores minerais. (CENTENO, 2007).
Ainda hoje, é possível identificar vários locais que mesmo se valendo do Sensoriamento
Remoto, como uma importante tecnologia de levantamento de dados, utilizam métodos
tradicionais para levantamentos topográficos e de modelos digitais diversos. Para MATOS
(2001) o levantamento topográfico tradicional é realizado através da tomada de pontos
cotados em um determinado terreno (processo realizado manualmente) e a geração das
curvas de nível é feita através da interpolação destes pontos pelo processo de “estéreo-
restituição”, onde se perde muita precisão em picos e cumeadas de alta inclinação pela falta
de uma grande matriz de densidade de pontos. Este modo de trabalho permite ao
profissional que utiliza e manuseia o processo, uma atribuição cientifica de grande
vantagem, mas demanda um enorme tempo e um vasto quadro de mão de obra para a
conclusão dos trabalhos.
Já no método LiDAR, a precisão é bastante considerável pelo fato de conter uma alta
densidade de pontos “ variável de 400.000 a 4.000.000 por segundo, sendo de 1 a 4 pontos
por metro quadrado”(MARTINS,FELIX e KERSTING, 2004, p3).Apresentando assim uma
alta riqueza de detalhes que o método da “estéreo-restituição” não é capaz de afirmar.Além
de uma alta precisão a tecnologia LiDAR parte em contrapartida do método tradicional, na
demanda de tempo e pessoal, que é permitido realizar um trabalho de centenas de
quilômetros quadrados em algumas semanas,diferentemente do método tradicional.
Metodologia
Levantamento Bibliográfico, por livros e artigos de Sensoriamento Remoto, Cartografia e Geodésica.
Relatos de Experiências de ambas as partes que utilizam tais tecnologias, tanto por parte de engenharias como por parte de Geografia.
Técnica LiDAR: principais características que a identifica O levantamento por perfilamento a laser inicia-se em 1993 com a empresa canadense
Optech inc. em conjunto com outra empresa a TopScan GmbH. O Perfilamento a LASER
5
desenvolveu-se a partir da necessidade de usuários de modelos digitais de elevação (DEM -
Digital Elevation Model) em casos onde os métodos tradicionais não eram suficientes. As
experiências iniciais com esta metodologia datam de 1993, e foram realizadas por um grupo
de pesquisa alemão da Deustche Forschungsgemeinsschaft, que mais tarde levaram a
criação da TopScan GmbH. Em conjunto com a empresa canadense Optech Inc., a TopScan
GmbH desenvolveu um método de Perfilamento a laser considerado como o primeiro
projeto demonstrativo da técnica.
Até a metade dos anos de 1990, havia apenas uma empresa comercializando sistemas de
Perfilagem a LASER e as empresas especializadas nesta tecnologia eram poucas. Em um
dos últimos levantamentos de mercado realizados no ano de 2000, constatou-se mais de
cinco (5) fabricantes de sistemas de Perfilamento a LASER que produzem sistemas
completos ou os componentes principais deste conjunto.
Neste mesmo levantamento de mercado, foram enumeradas mais vinte e cinco (25)
empresas que adquiriram sistemas e dez (10) empresas trabalhando em regime de locação,
além dos sistemas de testes e demonstração das empresas fabricantes que totalizavam cinco
(5) sistemas. Assim, são cerca de quarenta (40) sistemas de Perfilamento a LASER
concentrados principalmente na Europa, EUA, Canadá, Japão, Austrália e África do Sul.
(ESTEIO, Acesso em 12/09/2009).
Mesmo com o grande número de empresas que utilizam o sistema LiDAR, ter aumentado
nos últimos anos, ainda é pouco considerável em relação a gama de utilização oferecida
pelo sistema.
O sistema da tecnologia LiDAR (Light Detection and raging) funciona acoplado em uma
plataforma aerotransportada da seguinte forma:
Primeiro se instala o mecanismo de perfilamento laser em uma aeronave (avião ou
helicóptero) onde usualmente o avião traduz mais agilidade e rapidez, em extensas áreas e o
helicóptero é bastante usado em áreas montanhosas pela facilidade de se manter próximo as
mesmas.

6
Figura: 2 – Fonte: http://firecenter.umt.edu/files/images/Lidar-Agus.JPG
A imagem acima retrata o funcionamento da tecnologia Lidar, acoplada a uma aeronave,
onde os pontos em vermelho, representam os dados obtidos pelo mapeamento.
O sistema de varredura a laser é um sistema de Sensoriamento Remoto ativo, o que
significa que o sistema estimula o seu alvo, emitindo energia suficiente para receber a
resposta do alvo. O LiDAR emite feixes de laser na banda do infravermelho próximo (IV) e
obtém a resposta dos alvos mapeados captando pontos com quatro características (X,Y,Z,I).
O sistema é todo georeferênciado (amarrado) em coordenadas de marcos geodésicos (no
Brasil, usa-se preferencialmente, marcos implantados pelo Instituto Brasileiro de Geografia
e Estatística – IBGE), onde as coordenadas são conhecidas e medidas com muita precisão,
por GPS Geodésicos (explicados mais abaixo).
O LiDAR, funciona no sistema de projeções UTM (Universal Transversal de Mercartor),
que é um sistema de localização terrestre, e transforma a Terra em uma projeção plana,
facilitando assim a localização de alvos na Terra. É definido neste sistema, dois tipos de
coordenadas, X e Y (Norte e Leste), “As coordenadas N (norte) crescem de S para N e são
acrescidas de 10.000.000 (metros) para não se ter valores negativos ao sul do Equador que
é a referência de origem; já as coordenadas E (leste) crescem de W para E, acrescidas de
500.000 (metros) para não se ter valores negativos a oeste do meridiano central.” (UNB,
2009).
As coordenadas X e Y (Norte e Leste) do sistema LiDAR, são obtidas através da precisão
do GPS – Global System Position (Sistema de Posicionamento Global, que capita os sinais
emitidos por satélites ao redor da orbita terrestre, sinais estes que emitem a localização

7
precisa da Terra e o GPS triangula o sinal emitido, para obter maior precisão) ultra
geodésico, que permite leituras em uma precisão de até 3 cm.
A coordenada Z (altimetria) é obtida através do cálculo da diferença entre a altitude da
aeronave e a resposta do alvo escaneado (conhecido na literatura como resposta dos pulsos
– de 1 a 4 pulsos por alvo, onde os primeiros pulsos são caracterizados como vegetação ou
edificação, se o terreno as possui e os últimos pulsos são classificados como o solo ou as
feições de relevo do terreno).
Figura 03 – Fonte: LACTEC, 2003, adaptado.
A imagem acima retrata a identificação dos retornos (pulsos) obtidos pelo sistema LiDAR
na coordenada Z (Altimetria). Já a coordenada I (intensidade) é obtida pelo estimulo do
sensor ativo ao alvo, onde é capturado uma resposta de reflectância (resposta que cada alvo
emite ao estimulo pelos sensores ativos, no caso do LiDAR, é o sensor de laser) que é
medida em uma escala de cinza ( Gray Scale) e cada valor assume um pixel medido na
escala de 0 a 256, conforme mostra a figura 05.
Para retratar melhor a precisão planimétrica e altimétrica (planialtimétrica) do
escaneamento a laser XX expõe o sistema inertial do mecanismo laser. Como o scanner a
laser tem um alcance de precisão melhor que 1(um) dm, o sistema de posição e orientação
dele permite pelo mesmos a mesma precisão. Por este motivo, utiliza-ser unidades de
8
medição auxiliares, tal como o dGPS ( differencial global position system)que calcula a
posição (x,y,z)do sensor no espaço e o IMU (inertial measurement unit) que é responsável
pelo calculo da inclinação do sensor informa a direção. (XX) 2005.
As aplicações da tecnologia LiDAR são diversas e em vários setores de projetos e
engenharias, sendo constantemente utilizadas para os levantamentos topográficos e geração
de modelos digitais. São comumente levantamentos de estradas, para corte ou
planejamentos, levantamentos de linhas de transmissão, muito utilizado para acompanhar o
crescimento urbano nas áreas de servidão. Levantamentos de cavas de minas e extração de
minérios, em vista da obtenção de uma grande abrangência nesses locais e reforço nas
pesquisas de nível das áreas de praias, para verificar a intensidade das marés,
levantamentos em áreas para plantio de eucaliptos, com o objetivo de obtenção de dados
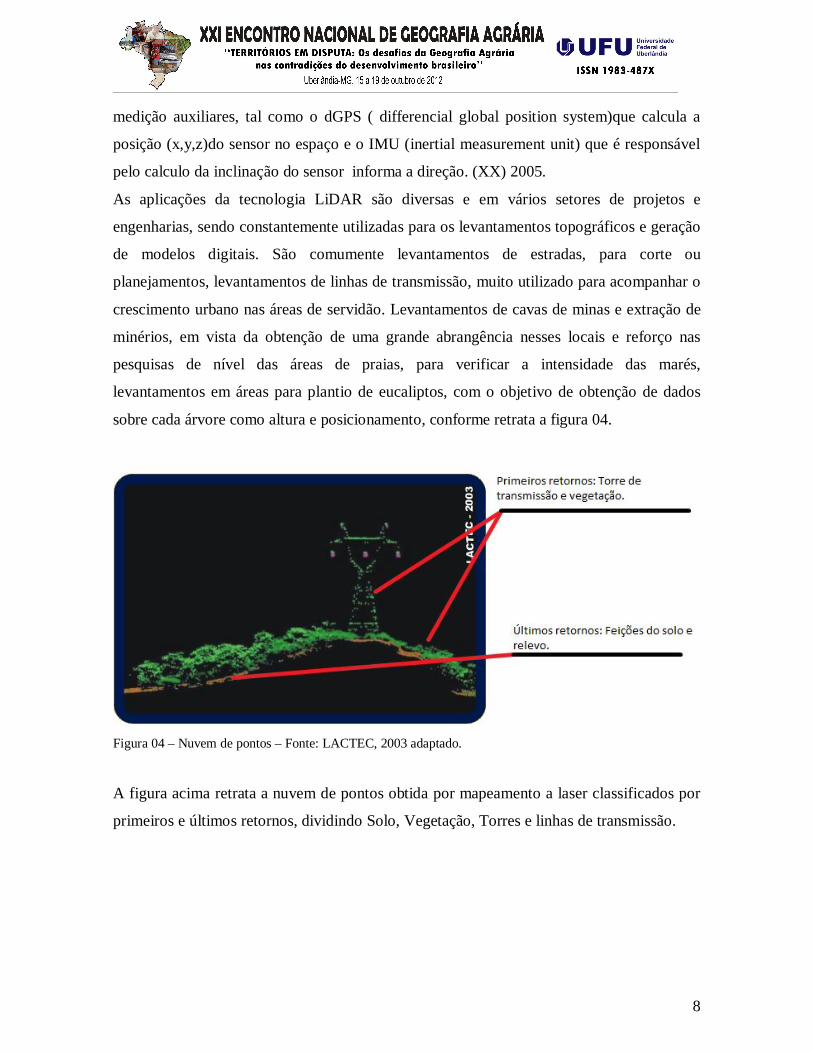
sobre cada árvore como altura e posicionamento, conforme retrata a figura 04.
Figura 04 – Nuvem de pontos – Fonte: LACTEC, 2003 adaptado.
A figura acima retrata a nuvem de pontos obtida por mapeamento a laser classificados por
primeiros e últimos retornos, dividindo Solo, Vegetação, Torres e linhas de transmissão.
9
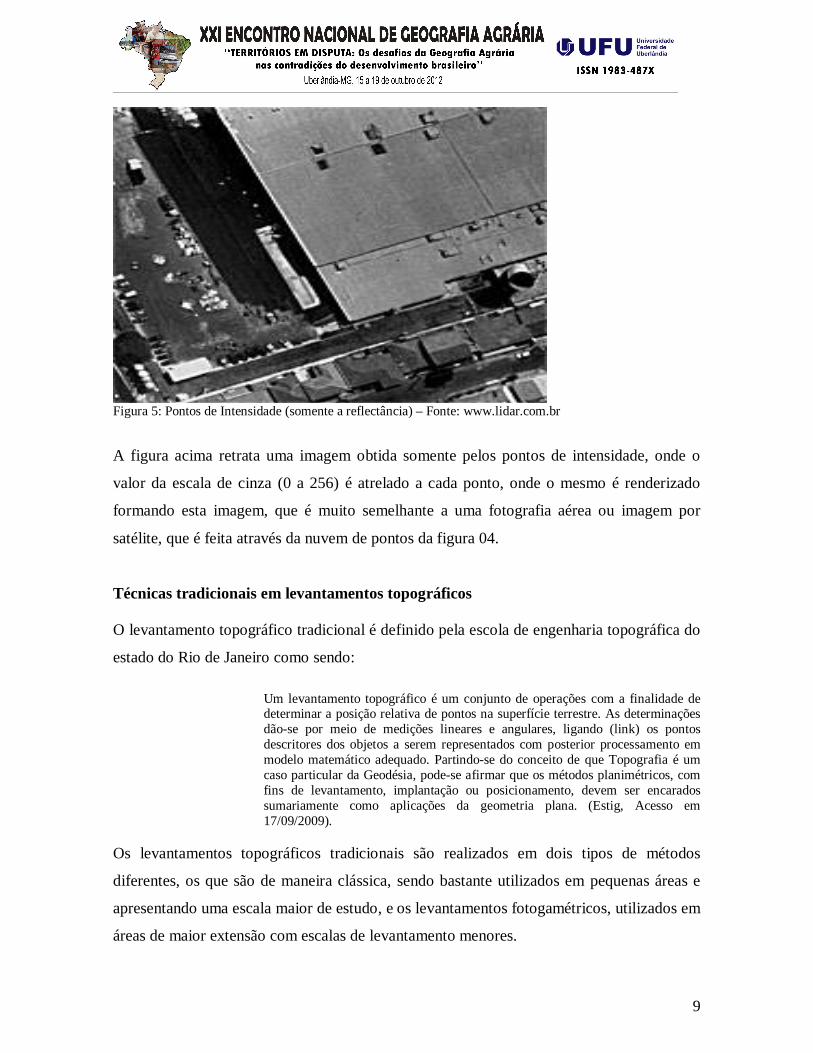
Figura 5: Pontos de Intensidade (somente a reflectância) – Fonte: www.lidar.com.br
A figura acima retrata uma imagem obtida somente pelos pontos de intensidade, onde o
valor da escala de cinza (0 a 256) é atrelado a cada ponto, onde o mesmo é renderizado
formando esta imagem, que é muito semelhante a uma fotografia aérea ou imagem por
satélite, que é feita através da nuvem de pontos da figura 04.
Técnicas tradicionais em levantamentos topográficos O levantamento topográfico tradicional é definido pela escola de engenharia topográfica do
estado do Rio de Janeiro como sendo: Um levantamento topográfico é um conjunto de operações com a finalidade de determinar a posição relativa de pontos na superfície terrestre. As determinações dão-se por meio de medições lineares e angulares, ligando (link) os pontos descritores dos objetos a serem representados com posterior processamento em modelo matemático adequado. Partindo-se do conceito de que Topografia é um caso particular da Geodésia, pode-se afirmar que os métodos planimétricos, com fins de levantamento, implantação ou posicionamento, devem ser encarados sumariamente como aplicações da geometria plana. (Estig, Acesso em 17/09/2009).
Os levantamentos topográficos tradicionais são realizados em dois tipos de métodos
diferentes, os que são de maneira clássica, sendo bastante utilizados em pequenas áreas e
apresentando uma escala maior de estudo, e os levantamentos fotogamétricos, utilizados em
áreas de maior extensão com escalas de levantamento menores.

10
Levantamento clássico: método topográfico O levantamento topográfico clássico consiste em realizar medições e cálculos angulares
para obter as coordenadas (X, Y, Z) da superfície terrestre, onde cada ponto é cotado por
aparelhos específicos (teodolitos e estação total- utilizados para calcular e receber os dados
respectivamente, onde o teodolito fica de frente a estação total, tomando assim pontos
conhecidos) e estes pontos são interligados entre si, formando uma malha de triangulação.
Esta malha permite reconhecer uma média de três pontos tomados no terreno
proporcionando assim o cobrimento de espaços vazios.
Foto 01 – Estação Total – Fonte: bragacity. Olx. pt/estacao-total-topcon-gpt-600.
Acima temos a foto de uma estação total, instrumento utilizado para leitura de pontos.
Figura 06 – Malha de triangulação – Fonte: www.comp.lancs.ac.uk

11
Na figura 06 é representada uma malha de triangulação, com pontos centrais a cada
triângulo, recobrindo assim todos os espaços vazios.
Levantamento aerofotogamétrico Os levantamentos topográficos por aerofotogrametria consistem em tomadas de fotografias
aéreas, onde as mesmas são acopladas em pontos conhecidos no terreno, realizando assim
uma estéreo-restituição das fotografias, que são observadas em esteoscópios (aparelhos
visuais utilizados para observar a profundidade das fotografias, obtendo uma visão de
terceira dimensão- 3D).
Através das fotografias e dos pontos conhecidos no terreno é possível calcular e traçar as
curvas de nível existentes no terreno.
Foto 02 – Processo de aéreofotogametria
Fonte: www.mundogeo.com.br
A fotografia acima mostra um exemplo de aérofotogametria, sendo realizada a estéreo-
restituição, lançando e calculando as curvas de nível sobre o terreno.
12
Foto 03 – Estereoscópio
Fonte: topometrica. Tecladigital. pt
A fotografia acima representa a imagem de um estereoscópio, utilizado para observação de
fotografias aéreas, podendo enxergar o relevo e suas feições.
Referências
CENTENO, Jorge e MITISHITA, Edson. Laser Scanner aerotransportado no estudo de áreas urbanas: A experiência da UFPR. SBSR, INPE, 2007. CRHISTOFOLETTI, Antonio. Modelagem de Sistemas Ambientais. Ed.Edgard Blucher, SP. 1999. MARTINS, Marlo. FELIX, Daniele. KERSTING, Ana. Análise do padrão de exatidão cartográfica (PEC) para dados provenientes do sistema laser – ALTM 2050. COBRAC – UFSC, 2004. MATOS, João Luiz de. Fundamentos de Informação Geográfica. Lidel 4ª ed. Coimbra, Portugal, 2001. Moreira, Mauricio Alves. Fundamentos de Sensoriamento Remoto e Metodologia de Aplicação. 3ª Ed. UFV, 2005. NOVO, Evlyn M.L de Moraes. Sensoriamento Remoto, Aplicações Básicas. Edgard Blücher Ltda. 2ªed.1998.