Embed Size (px)
Citation preview

• Clique para editar os estilos do texto mestre
– Segundo nível
• Terceiro nível– Quarto nível
Organização Brasileira Organização Brasileira para o Desenvolvimento para o Desenvolvimento da Certificação Aeronáuticada Certificação Aeronáutica
Realização Apoio
– Quarto nível
» Quinto nível
28/10/2010 1
Patrocínio
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
PROJETOPROJETO
AERONAVE NÃO-TRIPULADA AUTÔNOMAAERONAVE NÃO TRIPULADA AUTÔNOMA PARA INSPEÇÃO DE LINHAS DE
TRANSMISSÃOTRANSMISSÃO
CHESF – CESAR – ITACHESF CESAR ITA
Projeto de P&D CHESF / ANEELProjeto de P&D – CHESF / ANEELPrazo de Execução: 30 meses
2010 - 2012
Outubro de 2010 1
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Instituições PartícipesInstituições Partícipes
AplicaçãoCHESF COMPANHIA HIDRO ELÉTRICA DO SÃO FRANCISCOCHESF - COMPANHIA HIDRO ELÉTRICA DO SÃO FRANCISCO
Execução, Gestão Financeira e AdministrativaCESAR - CENTRO DE ESTUDOS E SISTEMAS AVANÇADOS DO RECIFE
Coordenação e ExecuçãoCoordenação e ExecuçãoITA - INSTITUTO TECNOLÓGICO DE AERONÁUTICA
G tã Fi i Ad i i t tiGestão Financeira e AdministrativaFCMF - FUNDAÇÃO CASIMIRO MONTENEGRO FILHO
Outubro de 2010 2
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Histórico
2004 - 2006 - Projeto FINEP – CESAR / ITA / FCMF / CHESF
2007 - 2009 - Negociações / Viabilização do Projeto ANEEL
2010 - 2012 - Execução do Projeto - ITA / FCMF / CESAR / CHESF2010 2012 Execução do Projeto ITA / FCMF / CESAR / CHESF
Outubro de 2010 3
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Inspeção de Linhas de Transmissão
• Procedimento de exame técnico para verificar:– A linha de transmissão;– Componentes e– Entorno.
• Objetivo da Inspeção:– Detectar defeitos ou anomalias que estejam comprometendo ou
venham a comprometer a operação ou a vida útil da linha, e a segurança de pessoassegurança de pessoas.
• Tipos de Inspeção:– Minuciosa;Minuciosa;– Expedita;– Aérea (entre outras).
Outubro de 2010 4
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Inspeção AéreaInspeção Aérea
• Espectro Visível– Tipicamente voltada para a detecção de defeitos do tipo:
• Quebra de isoladores;• Invasão de faixa;
Q i d• Queimadas e• Rompimento de cabos.
• Espectro Infravermelho• Espectro Infravermelho– Inspeção termográfica para detecção de pontos quentes em:
• Emendas;• Isoladores etc• Isoladores etc.
Outubro de 2010 5
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
JustificativasJustificativas
• Disponibilidade do serviçoM t ã diti• Manutenção preditiva
• Substituição de helicópteros tripulados– Alto custo de operação– Alto custo de mobilização para inspeções não planejadas– Baixa flexibilidade para emergências noturnas– Alto impacto (imagem e lucratividade) em caso de acidentes
• Contribuições nas áreas de– Qualidade de energia– Eficiência energéticaEficiência energética
Outubro de 2010 6
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Objetivo Geral
Projeto, construção, integração e testes de um
veiculo aéreo não-tripulado semi-autônomo paraveiculo aéreo não-tripulado semi-autônomo para
inspeção de linhas de transmissão para detecção,
localização e caracterização defeitos.
Outubro de 2010 7

INSTITUTO TECNOLÓGICO DE AERONÁUTICA
MetodologiaMetodologia
• Inovaçãoç• Abordagem experimental• Soluções pragmáticas
Fundamentação teórica• Fundamentação teórica• Redução de riscos• Modelos de Desenvolvimento
– Plataforma aérea prova de conceito – ALFA– Plataforma aérea aprimorada - BETA– Protótipo para integração de sistemas – DELTA I– Protótipo para prova de conceito da missão – DELTA II– Plataforma de asas rotativas – GAMA– Possivelmente outros....
Outubro de 2010 8
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Metas do Projeto
1. Plataforma Aérea de Asa Fixa2. Guiamento e Controle da Plataforma Aérea de Asa Fixa e
Integração de Sistemas3. Sistema de Apontamento e Imageamento Embarcado4 Plataforma Aérea de Asa Rotativa4. Plataforma Aérea de Asa Rotativa
Outubro de 2010 9
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Meta 1 – Plataforma Aérea de Asa Fixa
AERONAVE ALFA
Prova de Conceito Aeronáutico
Outubro de 2010 10
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave Alfa características geraisAeronave Alfa – características gerais
1. Aeronave de pequeno porte2. Tempo de desenvolvimento reduzido3. Baixo custo4. Raio de ação máximo 10 km5. Velocidade padrão 80 km/h6 Distância da linha de transmissão 60 m6. Distância da linha de transmissão 60 m7. Redução de efeitos das rajadas de vento8. Validação de conceitos teóricos aplicáveis a aeronaves
grandes e de velocidades superioresgrandes e de velocidades superiores
Outubro de 2010 11
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
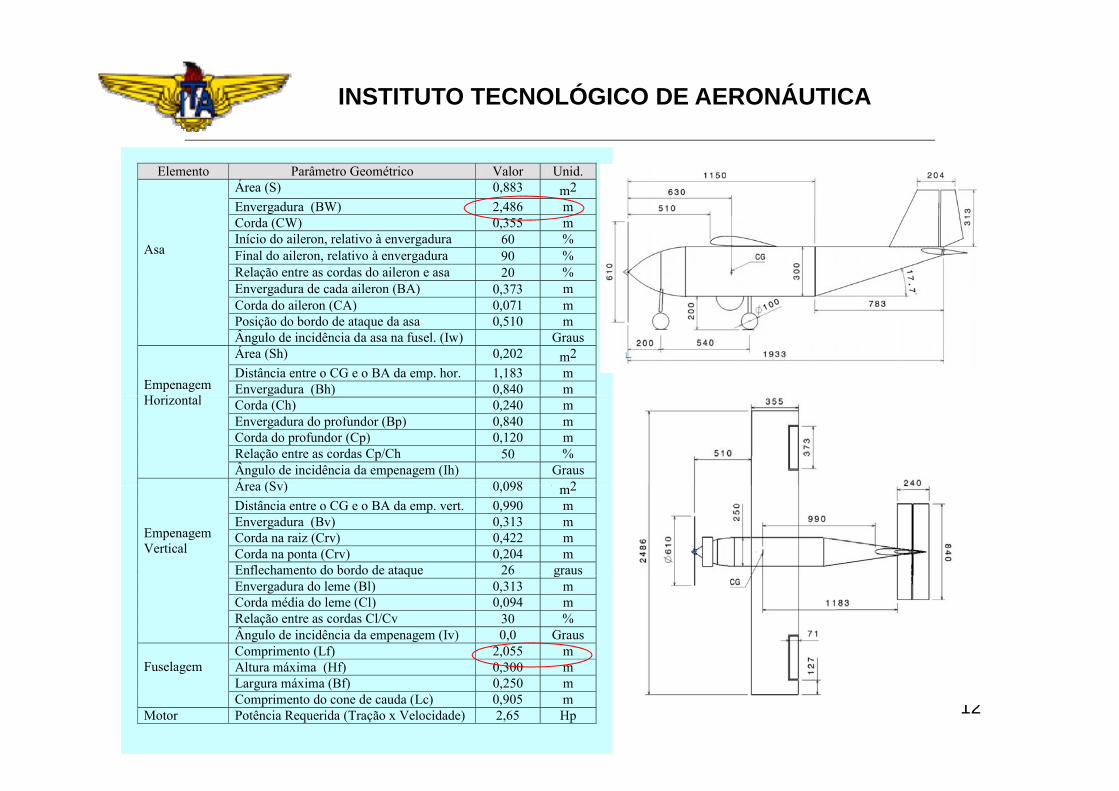
Elemento Parâmetro Geométrico Valor Unid.
Área (S) 0,883 m2 Envergadura (BW) 2,486 m
Corda (CW) 0,355 mInício do aileron, relativo à envergadura 60 % Final do aileron, relativo à envergadura 90 % Relação entre as cordas do aileron e asa 20 % Envergadura de cada aileron (BA) 0,373 m Corda do aileron (CA) 0 071 m
Asa
Corda do aileron (CA) 0,071 mPosição do bordo de ataque da asa 0,510 m Ângulo de incidência da asa na fusel. (Iw) Graus Área (Sh) 0,202 m2 Distância entre o CG e o BA da emp. hor. 1,183 m Envergadura (Bh) 0,840 m
Empenagem H i l
g ( ) ,Corda (Ch) 0,240 m Envergadura do profundor (Bp) 0,840 m Corda do profundor (Cp) 0,120 m Relação entre as cordas Cp/Ch 50 %
Horizontal
Ângulo de incidência da empenagem (Ih) Graus Área (Sv) 0 098 2Área (Sv) 0,098 m2Distância entre o CG e o BA da emp. vert. 0,990 m Envergadura (Bv) 0,313 m Corda na raiz (Crv) 0,422 m Corda na ponta (Crv) 0,204 m Enflechamento do bordo de ataque 26 graus
Empenagem Vertical
q gEnvergadura do leme (Bl) 0,313 m Corda média do leme (Cl) 0,094 m Relação entre as cordas Cl/Cv 30 % Ângulo de incidência da empenagem (Iv) 0,0 Graus Comprimento (Lf) 2,055 m Alt á i (Hf) 0 300
Fuselagem
Outubro de 2010 12
Altura máxima (Hf) 0,300 mLargura máxima (Bf) 0,250 m
Fuselagem
Comprimento do cone de cauda (Lc) 0,905 m Motor Potência Requerida (Tração x Velocidade) 2,65 Hp
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
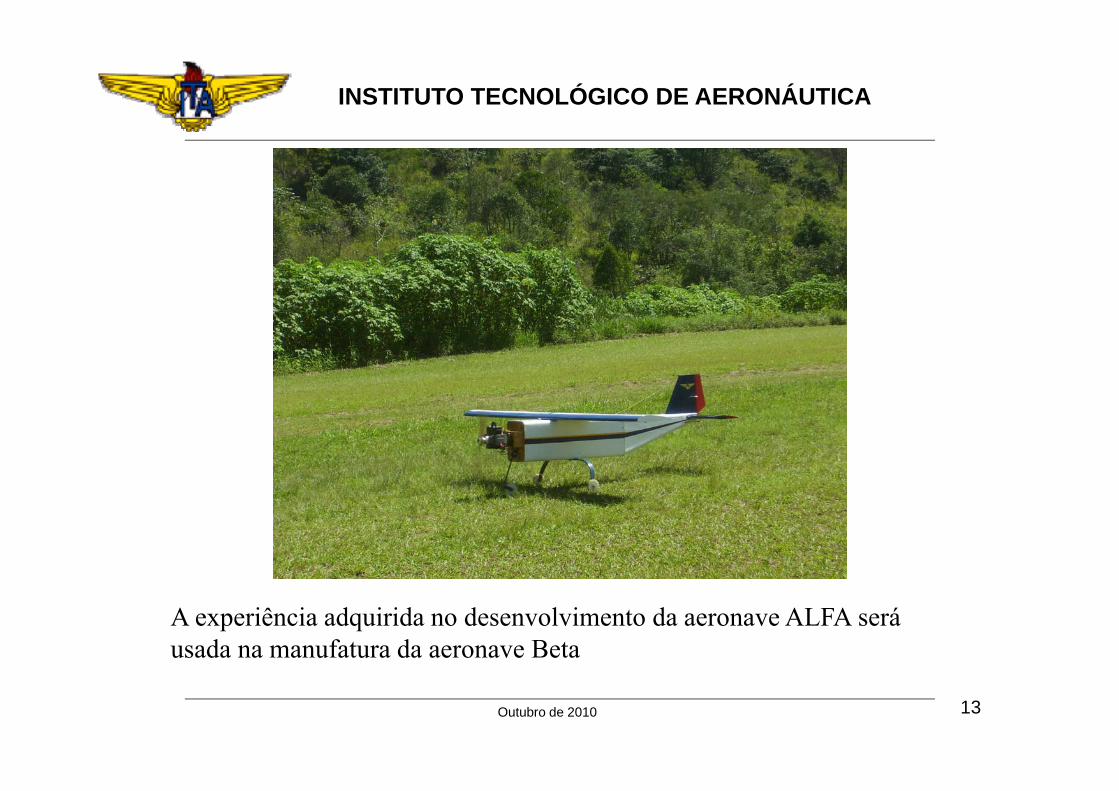
A experiência adquirida no desenvolvimento da aeronave ALFA será usada na manufatura da aeronave Beta
Outubro de 2010 13

INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Ensaio p/ determinar o torque que o motorTransmite p/ a aeronave
Ensaio p/ determinar a tração estática
Cabo de aço ligado a um dinamômetro
Nota: As montagens e os procedimentos experimentais desenvolvidos serão usados para testes semelhantes da aeronave Beta
Outubro de 2010 14
dinamômetro para testes semelhantes da aeronave Beta
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
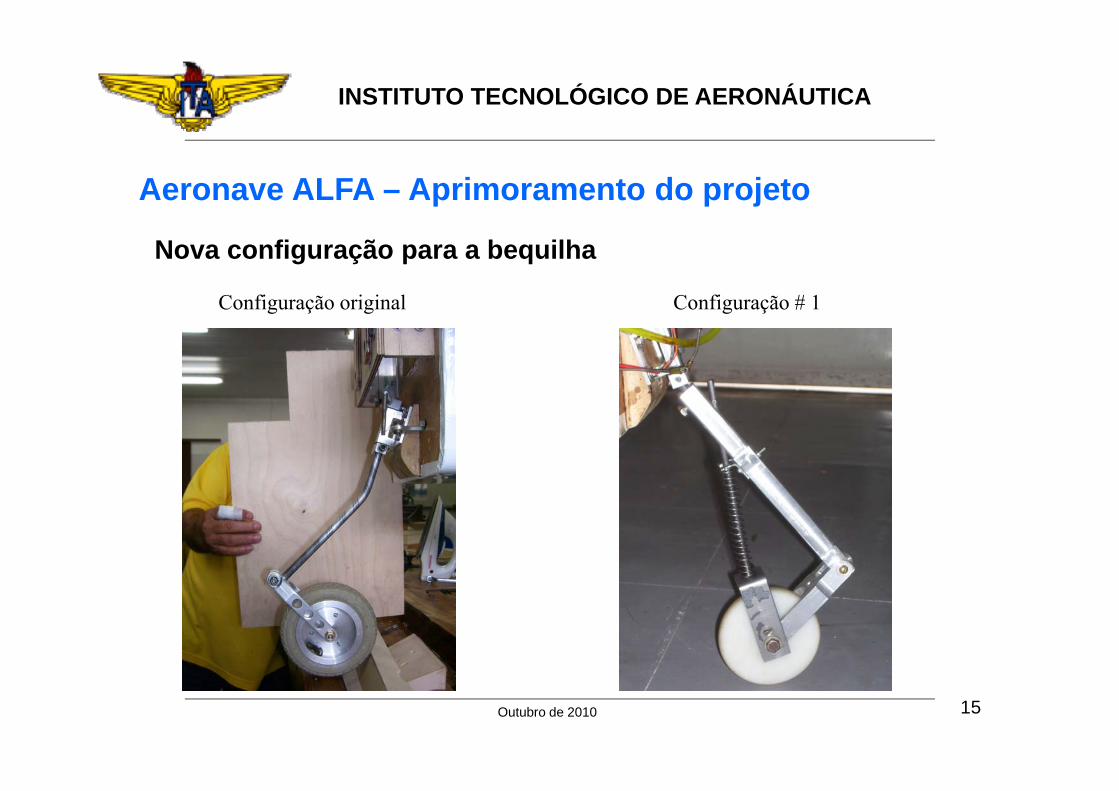
Aeronave ALFA – Aprimoramento do projeto
Nova configuração para a bequilha
Configuração # 1Configuração original Configuração # 1Configuração original
Outubro de 2010 15
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
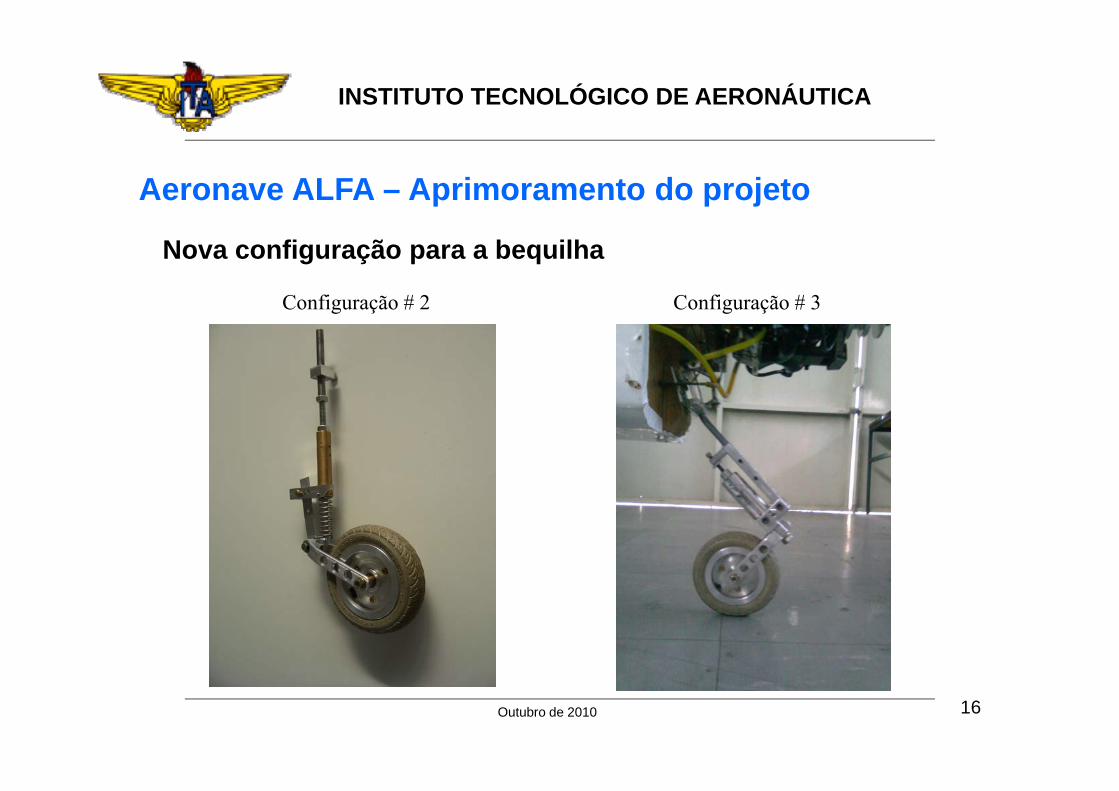
Aeronave ALFA – Aprimoramento do projeto
Configuração # 3Configuração # 2
Nova configuração para a bequilha
Configuração # 3Configuração # 2
Outubro de 2010 16

INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave ALFA – Aprimoramento do projeto
N d fí i d b h
Aeronave ALFA – Aprimoramento do projeto
Nova roda com superfície de borracha
PneuVálvula deenchimento
Elementos de borracha da nova roda nova roda montadaElementos metálicos
Outubro de 2010 17
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
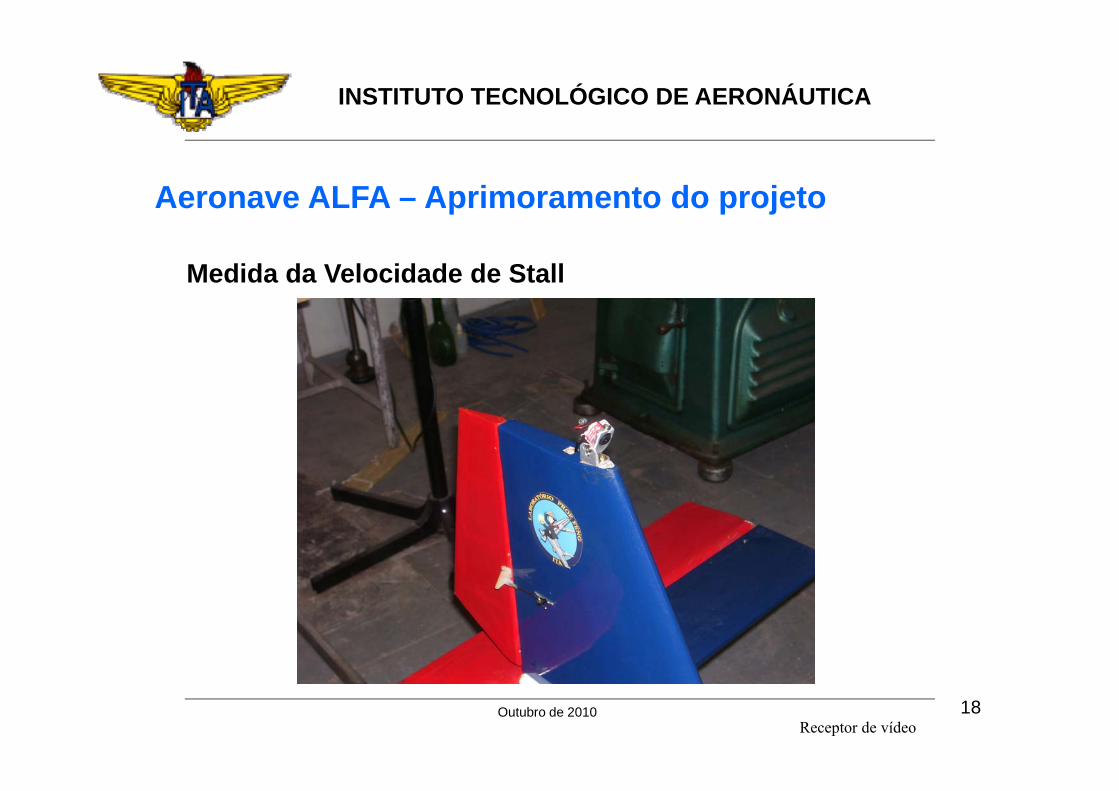
Aeronave ALFA – Aprimoramento do projeto
Medida da Velocidade de Stall
Outubro de 2010 18Receptor de vídeo
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave ALFA – Aprimoramento do projeto
Simulador de Voo
• Objetivo de possibilitar que o piloto voe o modelo da aeronave e ganhe j p q p gexperiência de pilotagem antes mesmo do voo real.
• Piloto tem a oportunidade de se familiarizar com a dinâmica da aeronave, incluindo a sua resposta aos controles de vôo.
NOTA: Este simulador de vôo também será aplicado a aeronave Beta assim como seráNOTA: Este simulador de vôo também será aplicado a aeronave Beta, assim como será muito útil no treinamento dos futuros pilotos, operadores da aeronave quando a mesma estiver em serviço na Chesf
Outubro de 2010 19

INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave ALFA – Aprimoramento do projeto
Desenvolvimento de carenagem do motor
1. Proteger a entrada de ar do carburador, evitando assim qualquer possibilidade de g , q q pinstabilização da injeção de combustível.
2. Diminuir o arrasto aerodinâmico da aeronave3. Aumentar a tração efetiva, reduzindo a interferência da fuselagem no fluxo de ar gerado
pela hélicepela hélice.
Outubro de 2010 20
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
M t 1 Pl t f Aé d A FiMeta 1 – Plataforma Aérea de Asa Fixa
AERONAVE BETAAERONAVE BETA
Aeronave Aprimorada
Outubro de 2010 21
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
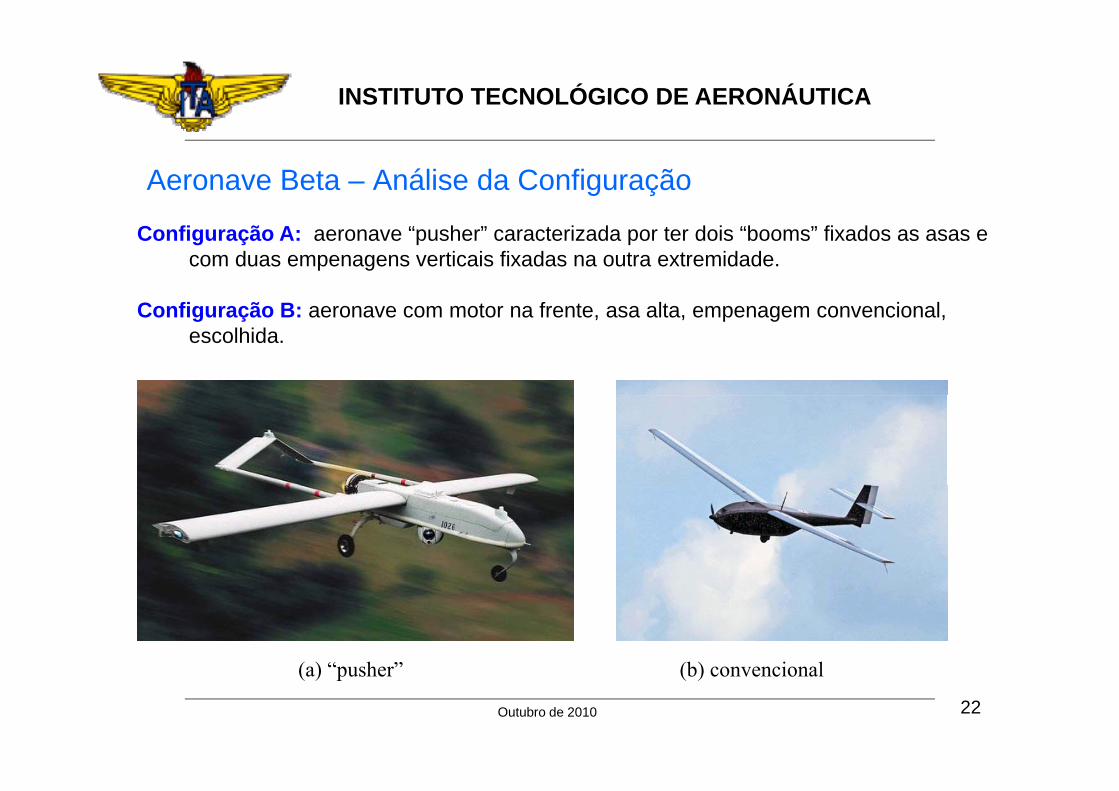
Aeronave Beta – Análise da Configuração
Configuração A: aeronave “pusher” caracterizada por ter dois “booms” fixados as asas e com duas empenagens verticais fixadas na outra extremidade.
C fi ã B t f t lt i lConfiguração B: aeronave com motor na frente, asa alta, empenagem convencional, escolhida.
( ) “ h ” (b) i l
Outubro de 2010 22
(a) “pusher” (b) convencional
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
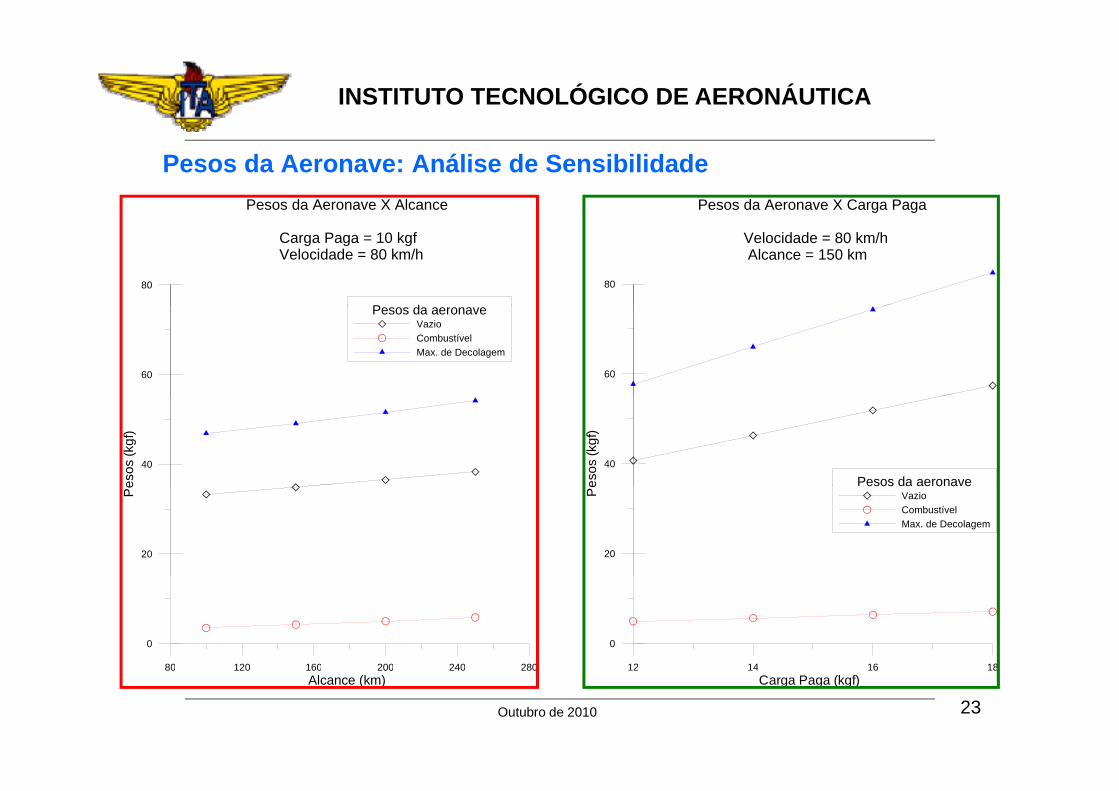
Pesos da Aeronave: Análise de SensibilidadePesos da Aeronave X Carga PagaPesos da Aeronave X Alcance
80
Velocidade = 80 km/h Alcance = 150 km
80
P d
Carga Paga = 10 kgf Velocidade = 80 km/h
6060
Pesos da aeronaveVazioCombustívelMax. de Decolagem
40
esos
(kgf
)
Pesos da aeronave40
esos
(kgf
)
20
Pe Pesos da aeronave
VazioCombustívelMax. de Decolagem
20
Pe
12 14 16 18
0
80 120 160 200 240 280
0
Outubro de 2010 23
12 14 16 18Carga Paga (kgf)
80 120 160 200 240 280Alcance (km)
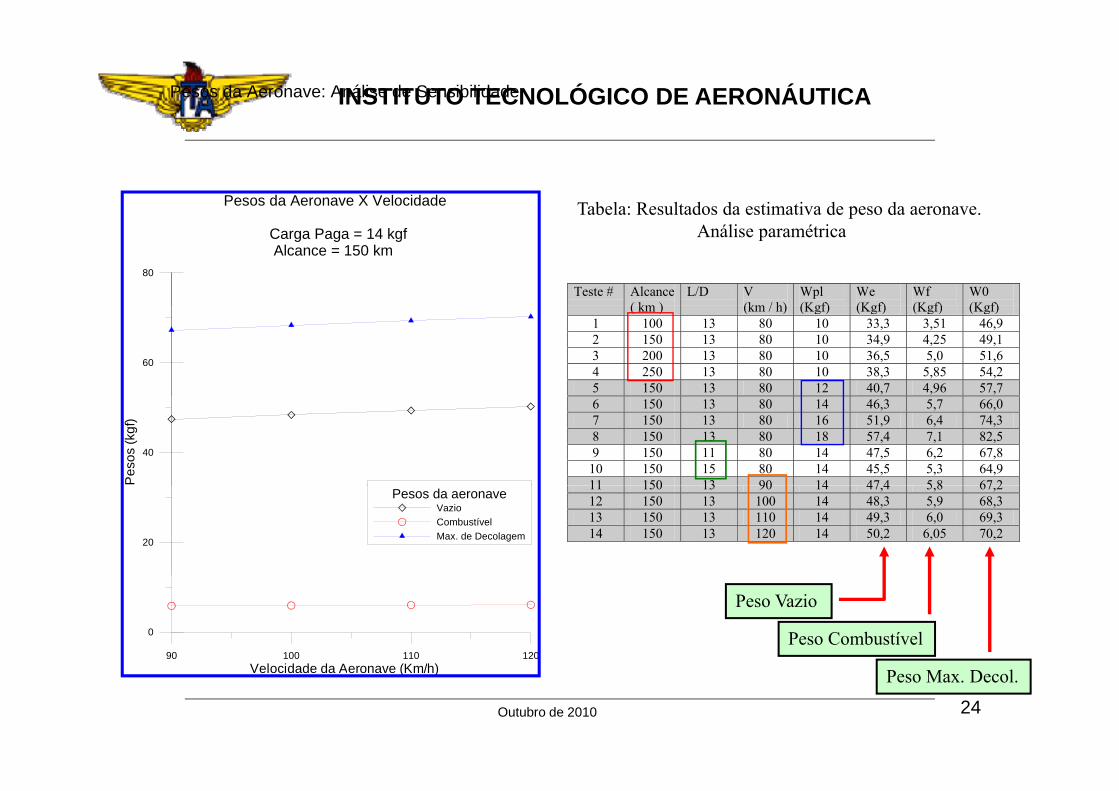
INSTITUTO TECNOLÓGICO DE AERONÁUTICAPesos da Aeronave: Análise de Sensibilidade
Pesos da Aeronave X Velocidade Tabela: Resultados da estimativa de peso da aeronave.
80
Carga Paga = 14 kgf Alcance = 150 km
Teste # Alcance
( km )L/D V
(km / h)Wpl (Kgf)
We (Kgf)
Wf (Kgf)
W0 (Kgf)
pAnálise paramétrica
60
( km ) (km / h) (Kgf) (Kgf) (Kgf) (Kgf) 1 100 13 80 10 33,3 3,51 46,9 2 150 13 80 10 34,9 4,25 49,1 3 200 13 80 10 36,5 5,0 51,6 4 250 13 80 10 38,3 5,85 54,2 5 150 13 80 12 40,7 4,96 57,7
40
Pes
os (k
gf)
6 150 13 80 14 46,3 5,7 66,0 7 150 13 80 16 51,9 6,4 74,3 8 150 13 80 18 57,4 7,1 82,5 9 150 11 80 14 47,5 6,2 67,8
10 150 15 80 14 45,5 5,3 64,9 11 150 13 90 14 47 4 5 8 67 2
20
Pesos da aeronaveVazioCombustívelMax. de Decolagem
11 150 13 90 14 47,4 5,8 67,2 12 150 13 100 14 48,3 5,9 68,3 13 150 13 110 14 49,3 6,0 69,3 14 150 13 120 14 50,2 6,05 70,2
90 100 110 120V l id d d A (K /h)
0
Peso Vazio
Peso Combustível
Outubro de 2010 24
Velocidade da Aeronave (Km/h) Peso Max. Decol.
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
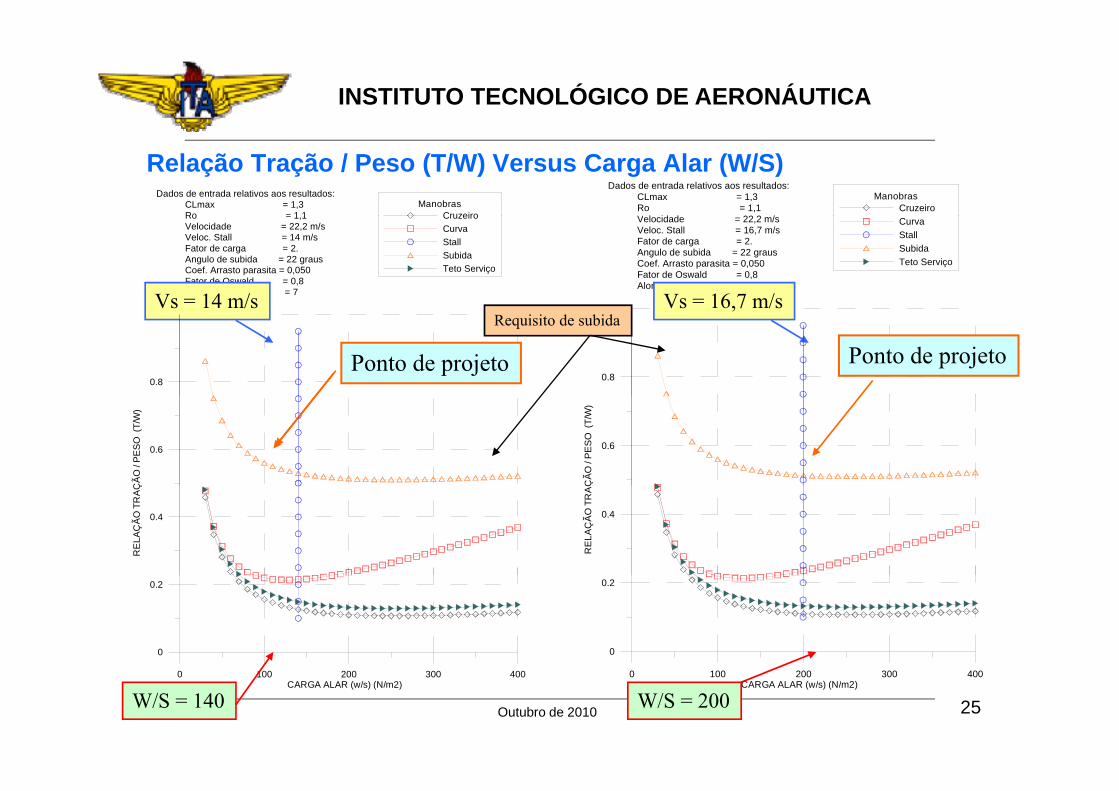
Relação Tração / Peso (T/W) Versus Carga Alar (W/S)Manobras
Cruzeiro
Dados de entrada relativos aos resultados: CLmax = 1,3
Ro = 1 1
ManobrasCruzeiro
Dados de entrada relativos aos resultados: CLmax = 1,3 Ro = 1,1
V l id d 22 2 /CruzeiroCurvaStallSubidaTeto Serviço
Ro = 1,1 Velocidade = 22,2 m/s Veloc. Stall = 14 m/s Fator de carga = 2. Angulo de subida = 22 graus Coef. Arrasto parasita = 0,050 Fator de Oswald = 0,8 Alongamento = 7
1
CurvaStallSubidaTeto Serviço
Velocidade = 22,2 m/s Veloc. Stall = 16,7 m/s Fator de carga = 2. Angulo de subida = 22 graus Coef. Arrasto parasita = 0,050 Fator de Oswald = 0,8 Alongamento = 7 Vs = 14 m/s Vs = 16,7 m/s
0.8
1
0.8
1
Ponto de projeto Ponto de projeto
Vs 14 m/s Vs 16,7 m/sRequisito de subida
0.6
ÇÃ
O /
PE
SO
(T/
W)
0.6
ÇÃO
/ P
ESO
(T/
W)
0.4
RE
LAÇ
ÃO
TR
AÇ
0.4
RE
LAÇ
ÃO
TR
AÇ
0
0.2
0
0.2
Outubro de 2010 25
0 100 200 300 400CARGA ALAR (w/s) (N/m2)
0 100 200 300 400CARGA ALAR (w/s) (N/m2)
W/S = 200W/S = 140
INSTITUTO TECNOLÓGICO DE AERONÁUTICARelação Tração / Peso (T/W) Versus Carga Alar (W/S)
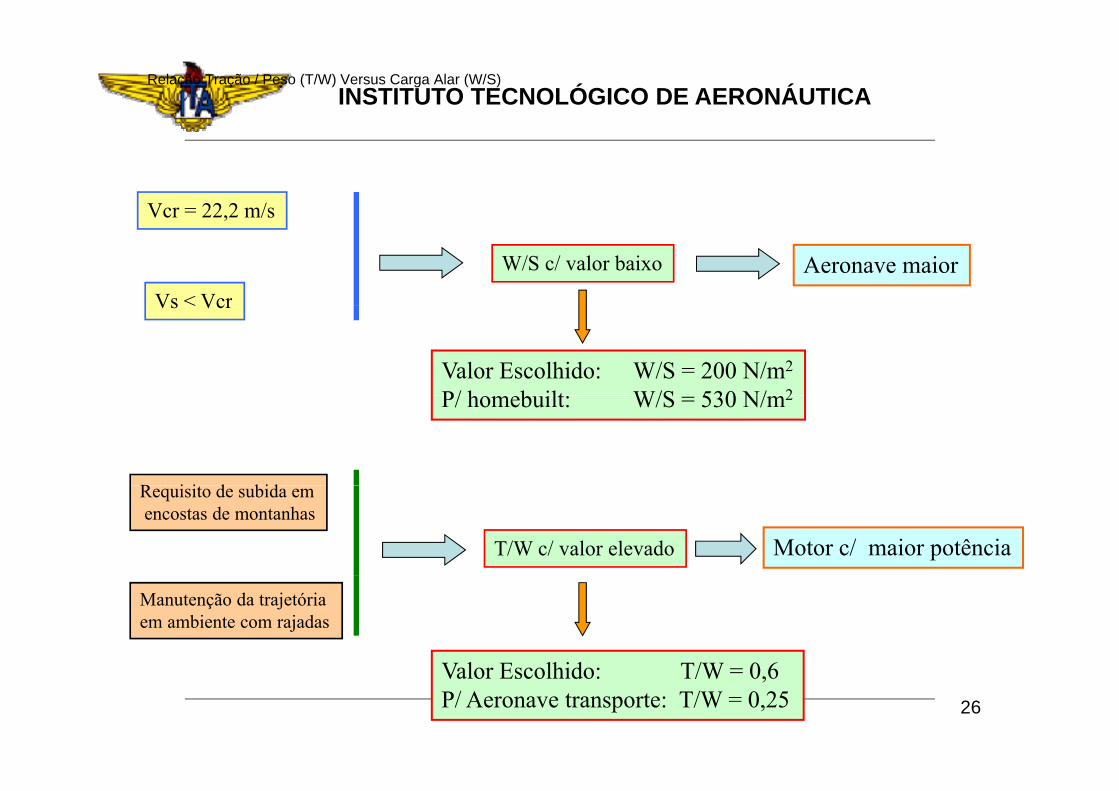
Vcr = 22,2 m/s
Aeronave maiorVs < Vcr
Vcr 22,2 m/s
W/S c/ valor baixo
Vs < Vcr
Valor Escolhido: W/S = 200 N/m2
P/ h b ilt W/S 530 N/ 2
R i i d bid
P/ homebuilt: W/S = 530 N/m2
Motor c/ maior potênciaT/W c/ valor elevado
Requisito de subida emencostas de montanhas
Manutenção da trajetória em ambiente com rajadas
V l E lhid T/W 0 6Outubro de 2010 26
Valor Escolhido: T/W = 0,6P/ Aeronave transporte: T/W = 0,25
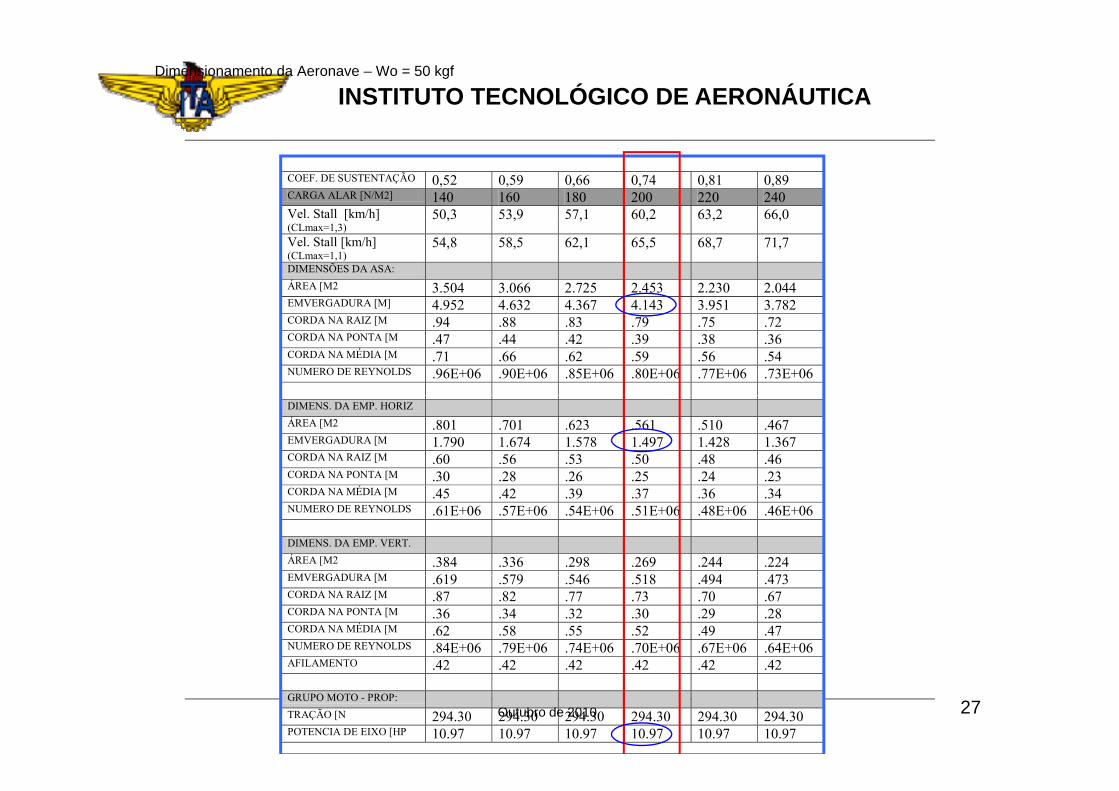
INSTITUTO TECNOLÓGICO DE AERONÁUTICADimensionamento da Aeronave – Wo = 50 kgf
COEF. DE SUSTENTAÇÃO 0,52 0,59 0,66 0,74 0,81 0,89 CARGA ALAR [N/M2] 140 160 180 200 220 240 Vel Stall [km/h] 50 3 53 9 57 1 60 2 63 2 66 0Vel. Stall [km/h] (CLmax=1,3)
50,3 53,9 57,1 60,2 63,2 66,0
Vel. Stall [km/h] (CLmax=1,1)
54,8 58,5 62,1 65,5 68,7 71,7
DIMENSÕES DA ASA: ÁREA [M2 3.504 3.066 2.725 2.453 2.230 2.044 EMVERGADURA [M] 4 952 4 632 4 367 4 143 3 951 3 782EMVERGADURA [M] 4.952 4.632 4.367 4.143 3.951 3.782CORDA NA RAIZ [M .94 .88 .83 .79 .75 .72 CORDA NA PONTA [M .47 .44 .42 .39 .38 .36 CORDA NA MÉDIA [M .71 .66 .62 .59 .56 .54 NUMERO DE REYNOLDS .96E+06 .90E+06 .85E+06 .80E+06 .77E+06 .73E+06 DIMENS. DA EMP. HORIZ ÁREA [M2 .801 .701 .623 .561 .510 .467 EMVERGADURA [M 1.790 1.674 1.578 1.497 1.428 1.367 CORDA NA RAIZ [M .60 .56 .53 .50 .48 .46 CORDA NA PONTA [M .30 .28 .26 .25 .24 .23 CORDA NA MÉDIA [M .45 .42 .39 .37 .36 .34 NUMERO DE REYNOLDS .61E+06 .57E+06 .54E+06 .51E+06 .48E+06 .46E+06 DIMENS. DA EMP. VERT. ÁREA [M2 .384 .336 .298 .269 .244 .224 EMVERGADURA [M 619 579 546 518 494 473EMVERGADURA [M .619 .579 .546 .518 .494 .473CORDA NA RAIZ [M .87 .82 .77 .73 .70 .67 CORDA NA PONTA [M .36 .34 .32 .30 .29 .28 CORDA NA MÉDIA [M .62 .58 .55 .52 .49 .47 NUMERO DE REYNOLDS .84E+06 .79E+06 .74E+06 .70E+06 .67E+06 .64E+06 AFILAMENTO 42 42 42 42 42 42
Outubro de 2010 27
AFILAMENTO .42 .42 .42 .42 .42 .42 GRUPO MOTO - PROP: TRAÇÃO [N 294.30 294.30 294.30 294.30 294.30 294.30 POTENCIA DE EIXO [HP� 10.97 10.97� 10.97� 10.97 10.97 10.97
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Dimensionamento inicial da aeronave
1. Carga paga especificada em 10 kgf g p g p g
2. Estimado o peso do para-quedas em 3 kgf
3. Alcance fixado em 100 km
Outubro de 2010 28

INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Outubro de 2010 29
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Meta 2 – Guiamento e Controle da Plataforma Aérea de Asa Fixa e Integração de Sistemas
AERONAVE DELTA I
Integração de Sistemas
Outubro de 2010 30
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave Delta I
• Foram realizados testes da aviônica de guiamento e controle d d l bj ti d lid l ã d t dusando aeromodelo com o objetivo de validar a solução adotada.
• Os testes com alcance reduzido (3 km) foram realizados com sucesso.
Outubro de 2010 31
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
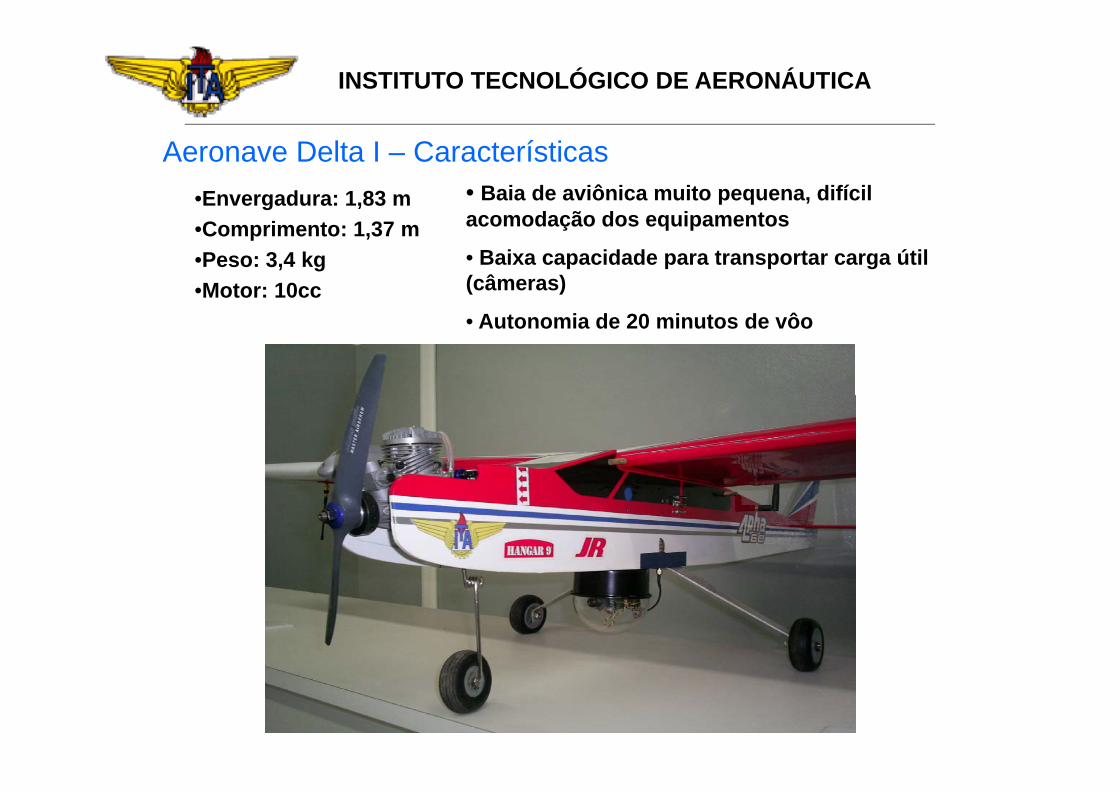
Aeronave Delta I – Características•Envergadura: 1,83 m • Baia de aviônica muito pequena, difícil
acomodação dos equipamentos•Comprimento: 1,37 m•Peso: 3,4 kg•Motor: 10cc
acomodação dos equipamentos
• Baixa capacidade para transportar carga útil (câmeras)
• Autonomia de 20 minutos de vôo

INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave Delta I – Software da Estação de Controle em Solo
Plano de vôo
Configurações da
Mapa ou foto d iã d
aeronave
da região do vôo
Controles extrasVelocidade do arHorizonte artificial
Controles extras
Outubro de 2010 33Altitude

INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave Delta I – Estação de controle em solo

INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave Delta I – Software de gerenciamento de missão
• Mapa da região• Mapa da região• Ajuste em vôo dos ganhos das malhas de controle• 1000 waypoints
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Estudo da Confiabilidade do Segmento Aéreo
Aumentar a confiabilidade do sistema de controle eletrônico de vooembarcado em um VANT por meio da implementação de
d dâ i d b i t il t l t lredundâncias de baixo custo para que o piloto em solo controle oVANT com mais segurança nas seguintes fases de voo:
• decolagem/subida,
• aproximação/pouso.p p
Outubro de 2010 36
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
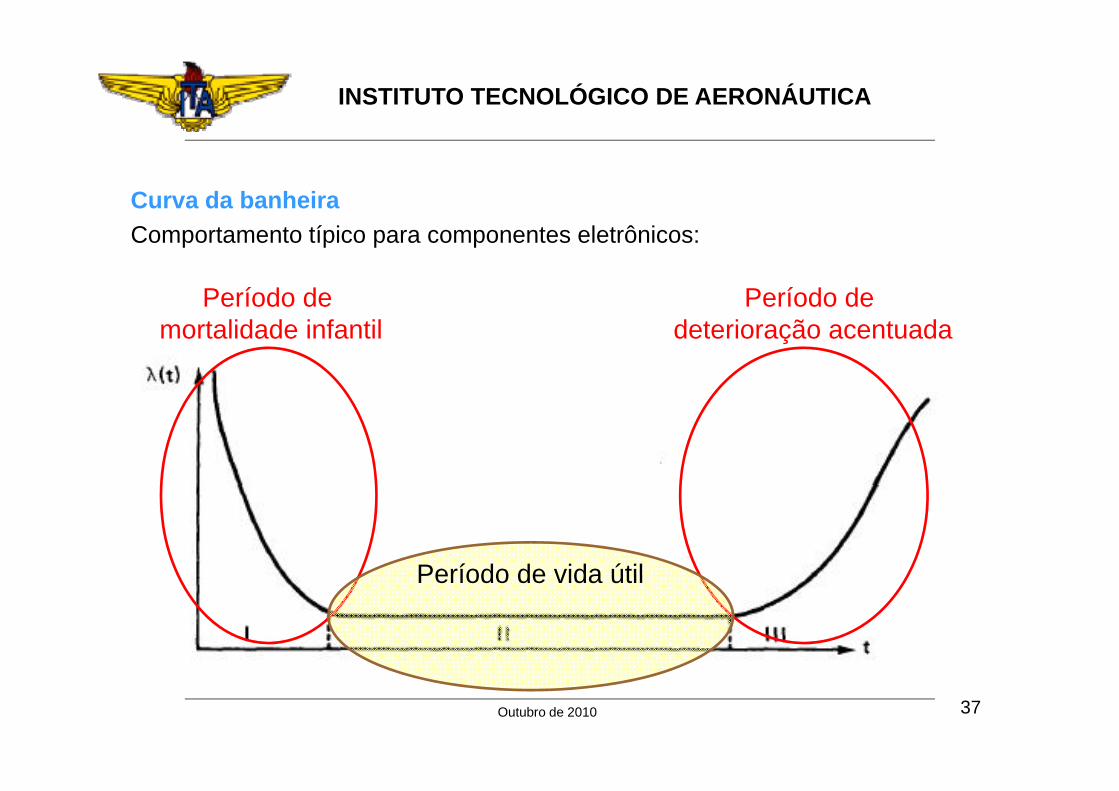
Curva da banheiraComportamento típico para componentes eletrônicos:
Período de Período dePeríodo de mortalidade infantil
Período de deterioração acentuada
Período de vida útilPeríodo de vida útil
Outubro de 2010 37
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
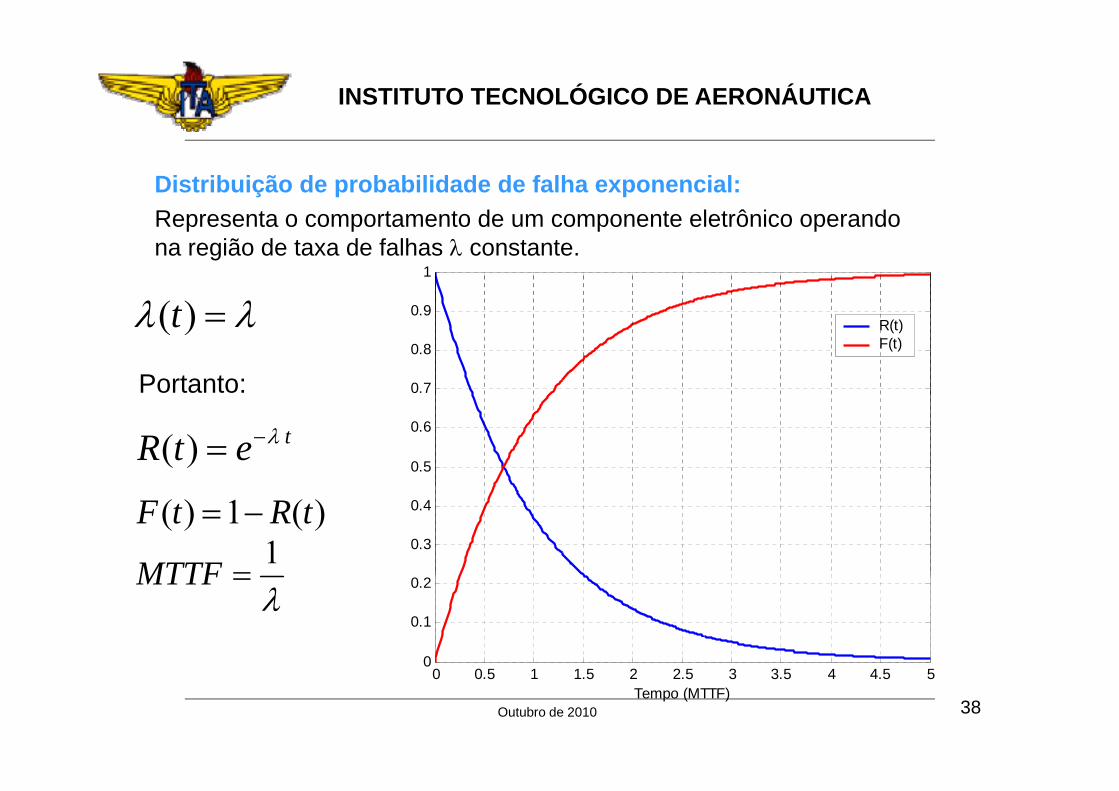
Distribuição de probabilidade de falha exponencial:Representa o comportamento de um componente eletrônico operandoRepresenta o comportamento de um componente eletrônico operando na região de taxa de falhas λ constante.
λλ )(t 0 9
1
λλ =)(t
Portanto: 0.7
0.8
0.9R(t)F(t)
tetR λ−=)(0.5
0.6
1=MTTF
)(1)( tRtF −=0.3
0.4
λ=MTTF
0
0.1
0.2
Outubro de 2010 38
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
Tempo (MTTF)
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
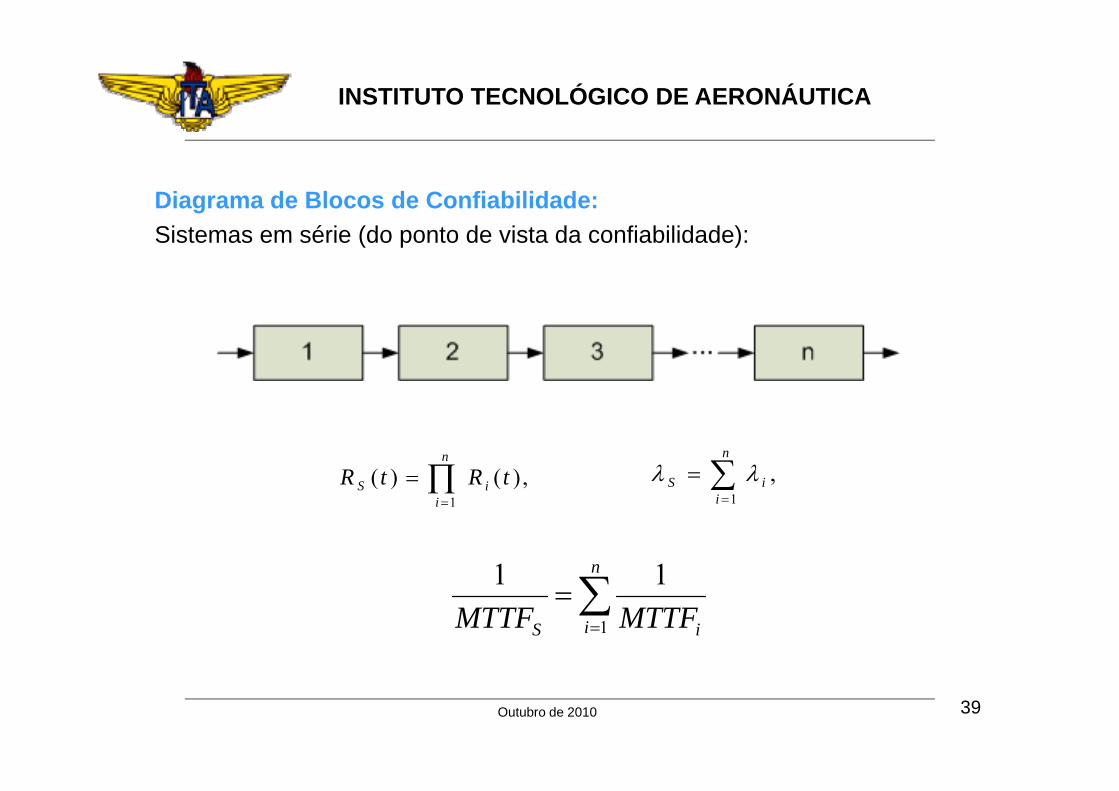
Diagrama de Blocos de Confiabilidade:Sistemas em série (do ponto de vista da confiabilidade):
,)()( ∏=n
iS tRtR ,∑=n
iS λλ,)()(1
∏=i
iS1∑=i
iS
n 11 ∑=
=i iS MTTFMTTF 1
11
Outubro de 2010 39
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
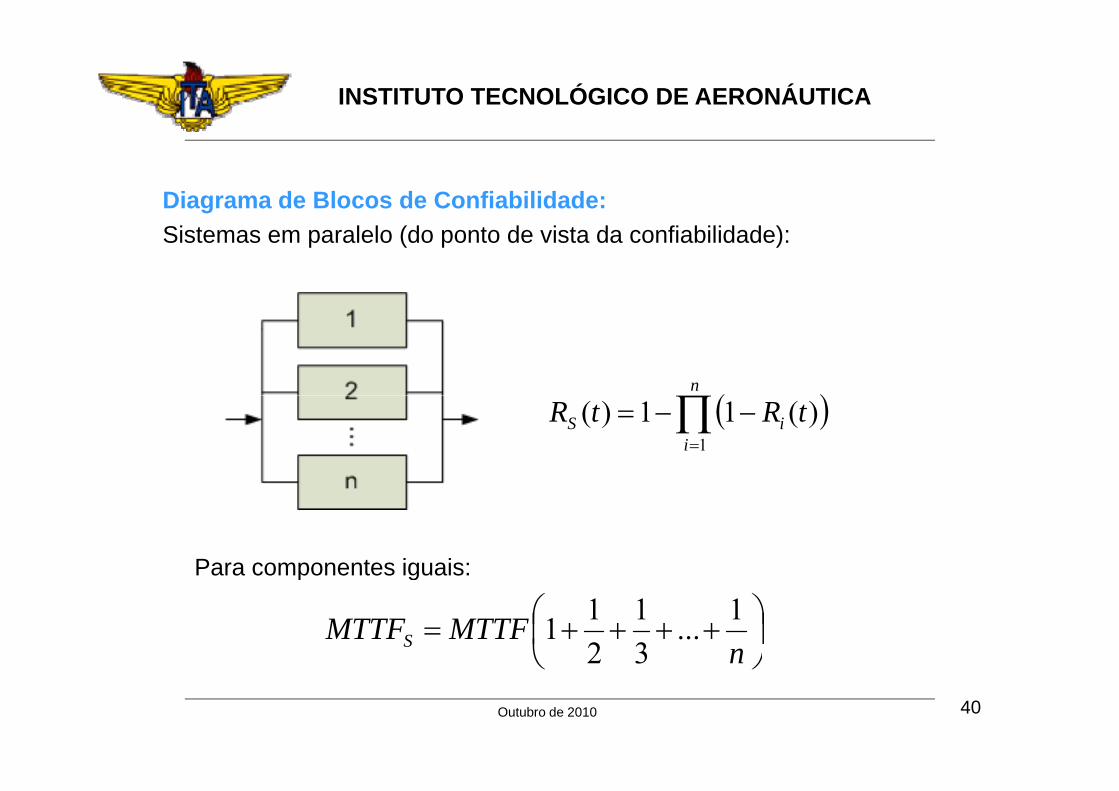
Diagrama de Blocos de Confiabilidade:Sistemas em paralelo (do ponto de vista da confiabilidade):
( )∏n
( )∏=
−−=i
iS tRtR1
)(11)(
Para componentes iguais:
⎟⎠⎞
⎜⎝⎛ ++++=
nMTTFMTTFS
1...31
211
Para componentes iguais:
Outubro de 2010 40
⎠⎝
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
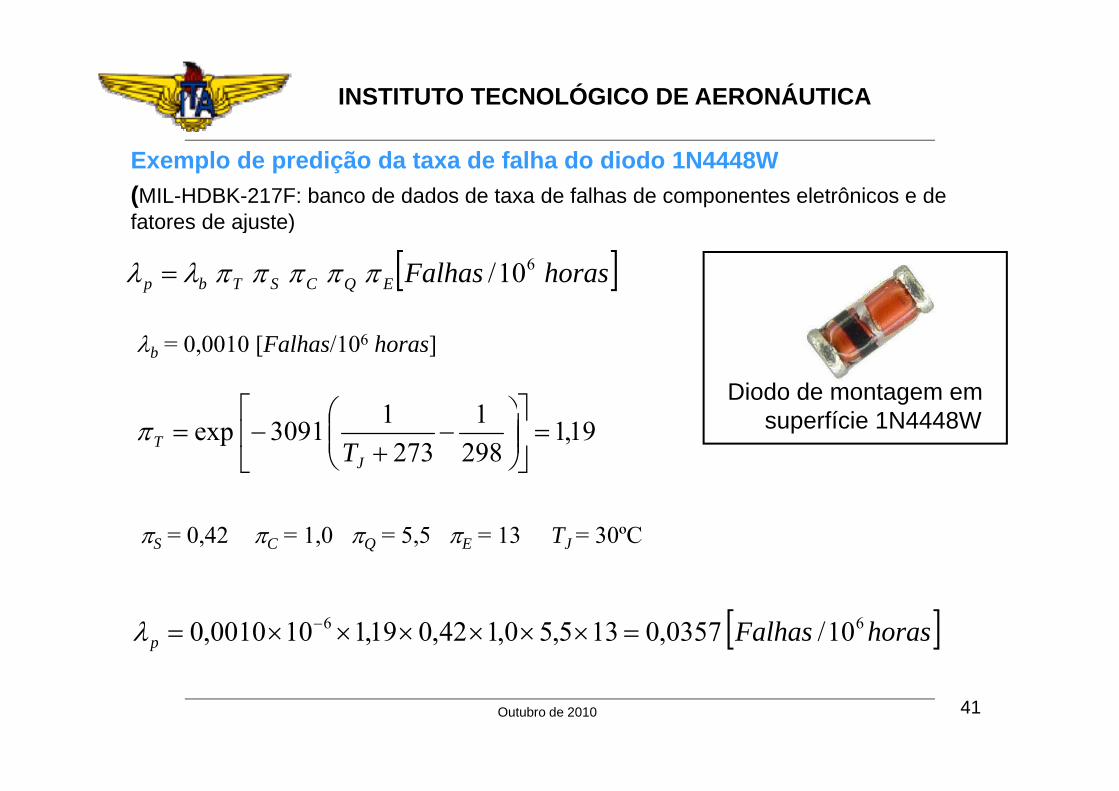
Exemplo de predição da taxa de falha do diodo 1N4448W(MIL-HDBK-217F: banco de dados de taxa de falhas de componentes eletrônicos e de f t d j t )fatores de ajuste)
[ ]horasFalhasEQCSTbp610/πππππλλ =
⎤⎡ ⎞⎛
λb = 0,0010 [Falhas/106 horas]
Diodo de montagem em
19,12981
27313091exp =⎥
⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
+−=
JT T
πDiodo de montagem em
superfície 1N4448W
πS = 0,42 πC = 1,0 πQ = 5,5 πE = 13 TJ = 30ºC
[ ]horasFalhasp66 10/0357,0135,50,142,019,1100010,0 =××××××= −λ
Outubro de 2010 41
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
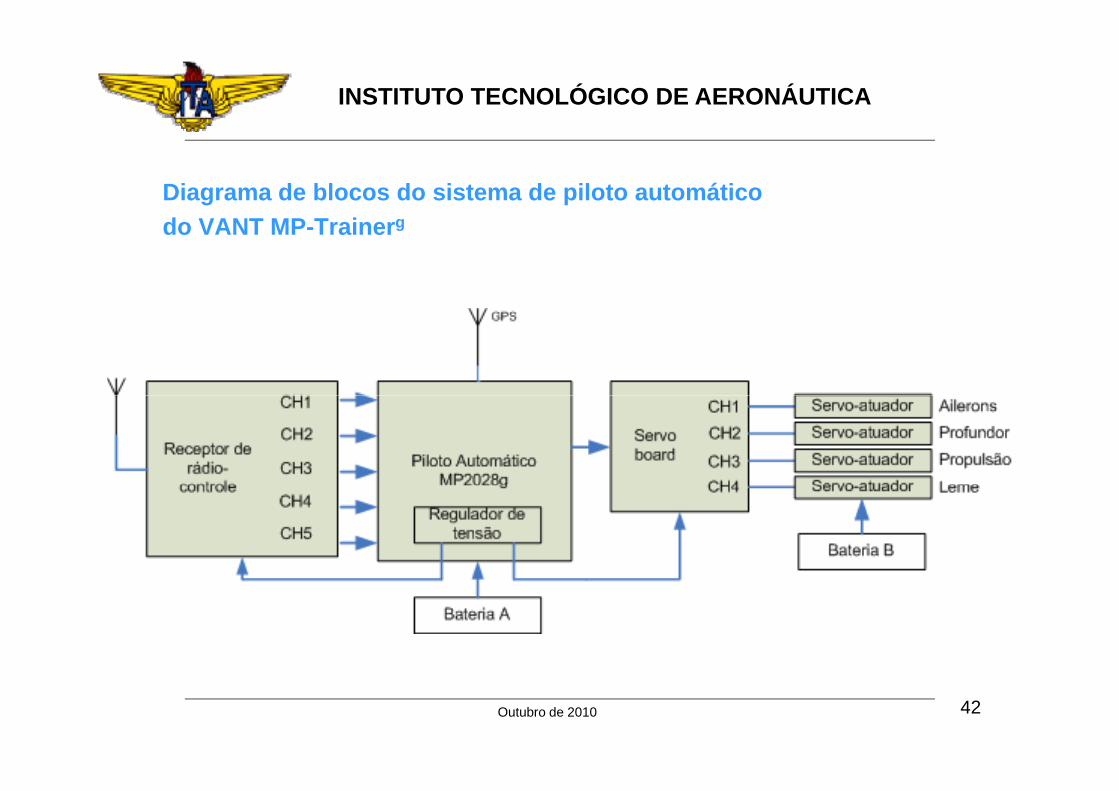
Diagrama de blocos do sistema de piloto automáticodo VANT MP-Trainerg
Outubro de 2010 42
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
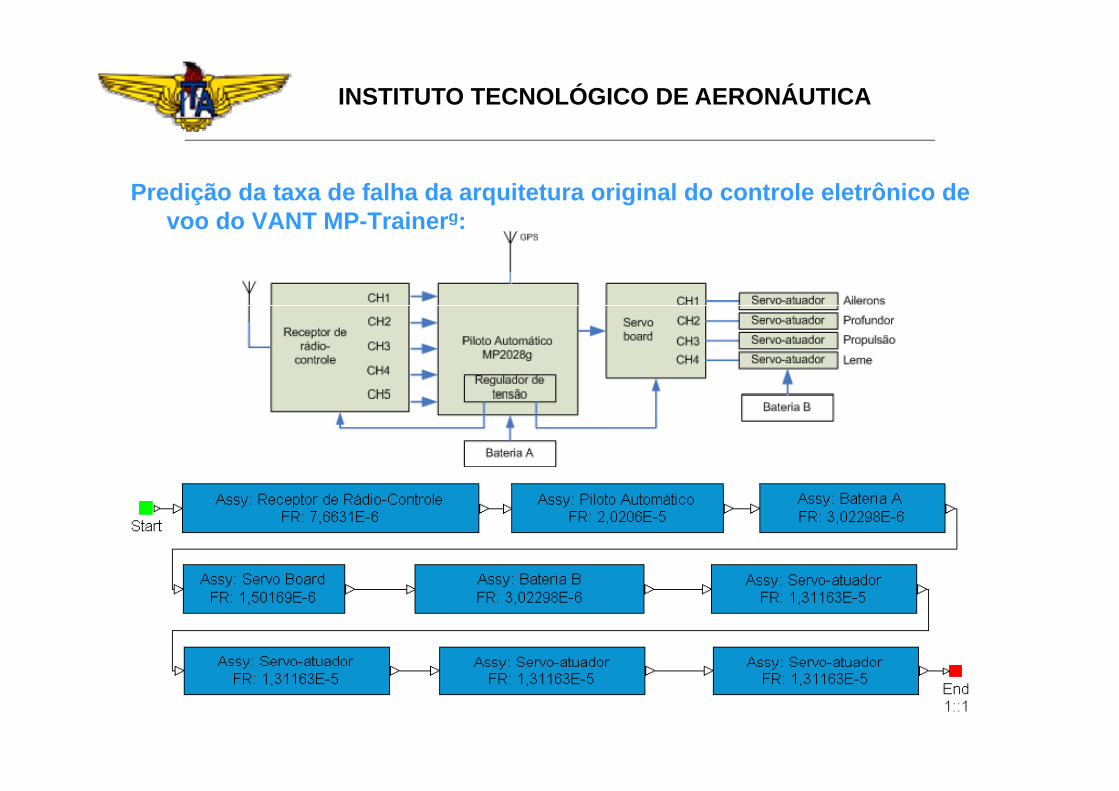
Predição da taxa de falha da arquitetura original do controle eletrônico de d VANT MP T i gvoo do VANT MP-Trainerg:
Outubro de 2010 43
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
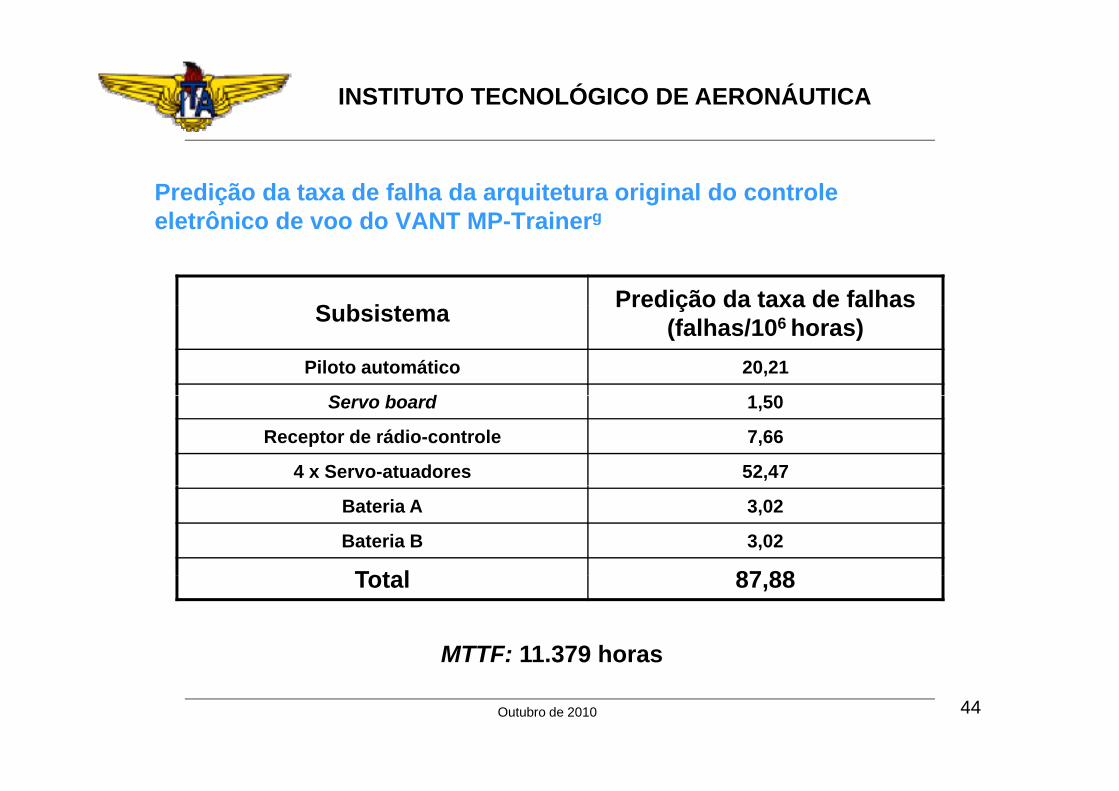
Predição da taxa de falha da arquitetura original do controle l t ô i d d VANT MP T i geletrônico de voo do VANT MP-Trainerg
S b i t Predição da taxa de falhasSubsistema Predição da taxa de falhas (falhas/106 horas)
Piloto automático 20,21
S b d 1 50Servo board 1,50
Receptor de rádio-controle 7,66
4 x Servo-atuadores 52,47
Bateria A 3,02
Bateria B 3,02
Total 87 88Total 87,88
MTTF: 11.379 horas
Outubro de 2010 44
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
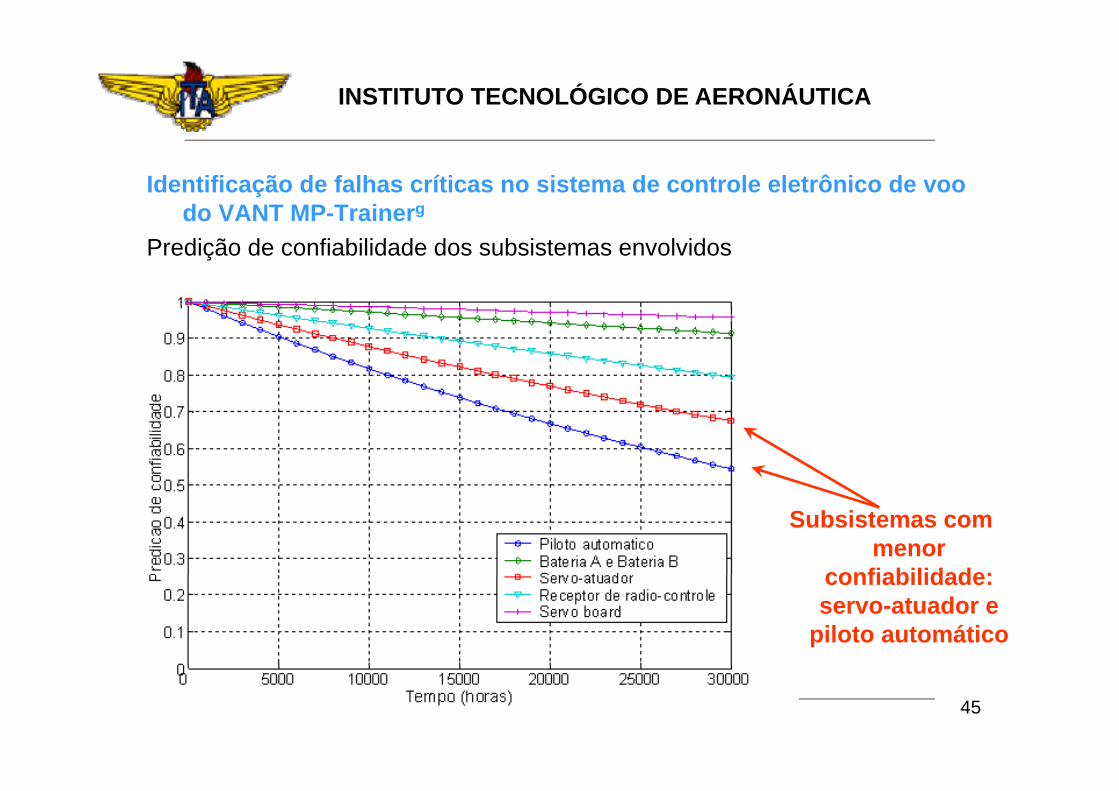
Identificação de falhas críticas no sistema de controle eletrônico de voo do VANT MP-Trainergdo VANT MP-Trainerg
Predição de confiabilidade dos subsistemas envolvidos
Subsistemas com menor
confiabilidade:confiabilidade: servo-atuador e
piloto automático
Outubro de 2010 45
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
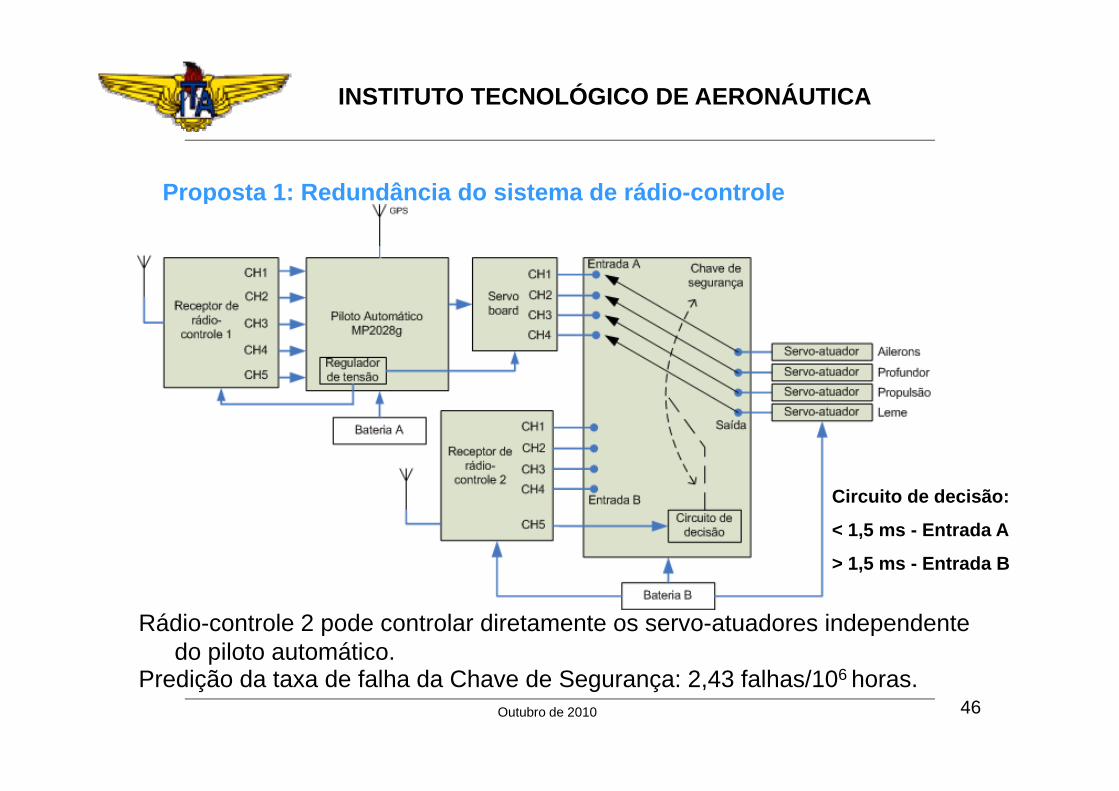
Proposta 1: Redundância do sistema de rádio-controle
Circuito de decisão:
< 1,5 ms - Entrada A
> 1,5 ms - Entrada B
Rádio-controle 2 pode controlar diretamente os servo-atuadores independente do piloto automático.
Outubro de 2010 46Predição da taxa de falha da Chave de Segurança: 2,43 falhas/106 horas.
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
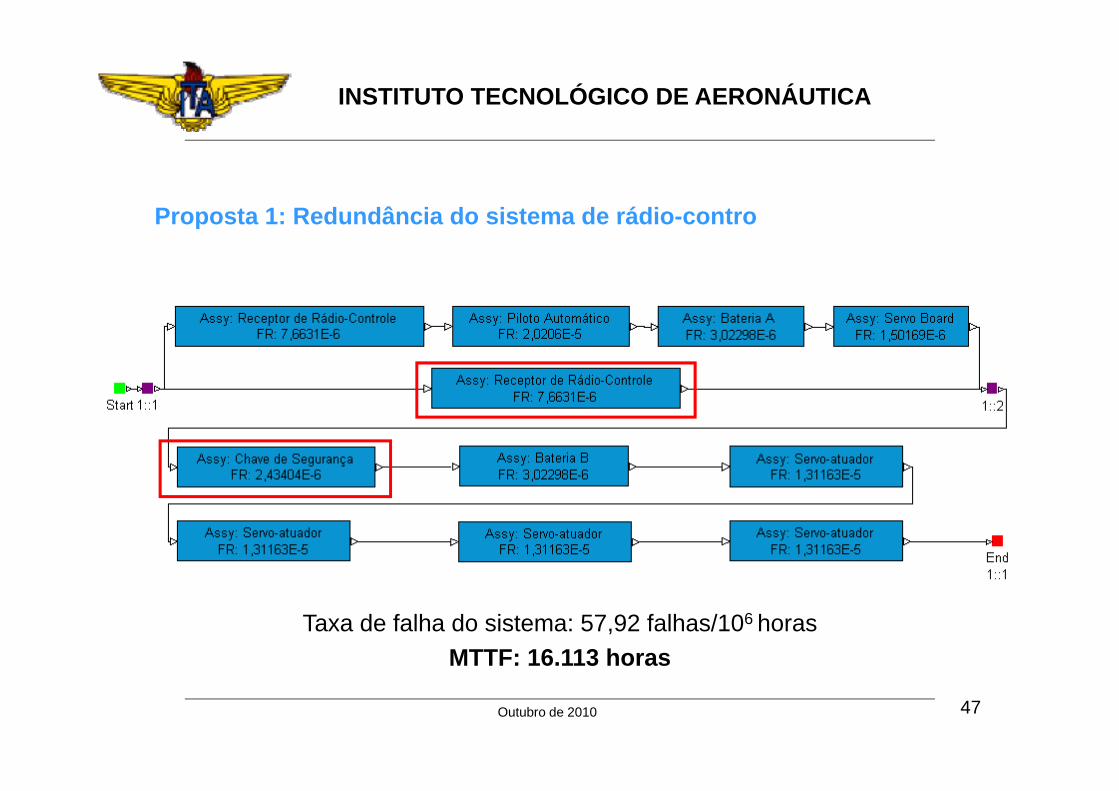
Proposta 1: Redundância do sistema de rádio controProposta 1: Redundância do sistema de rádio-contro
Taxa de falha do sistema: 57,92 falhas/106 horasMTTF: 16.113 horas
Outubro de 2010 47
MTTF: 16.113 horas
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
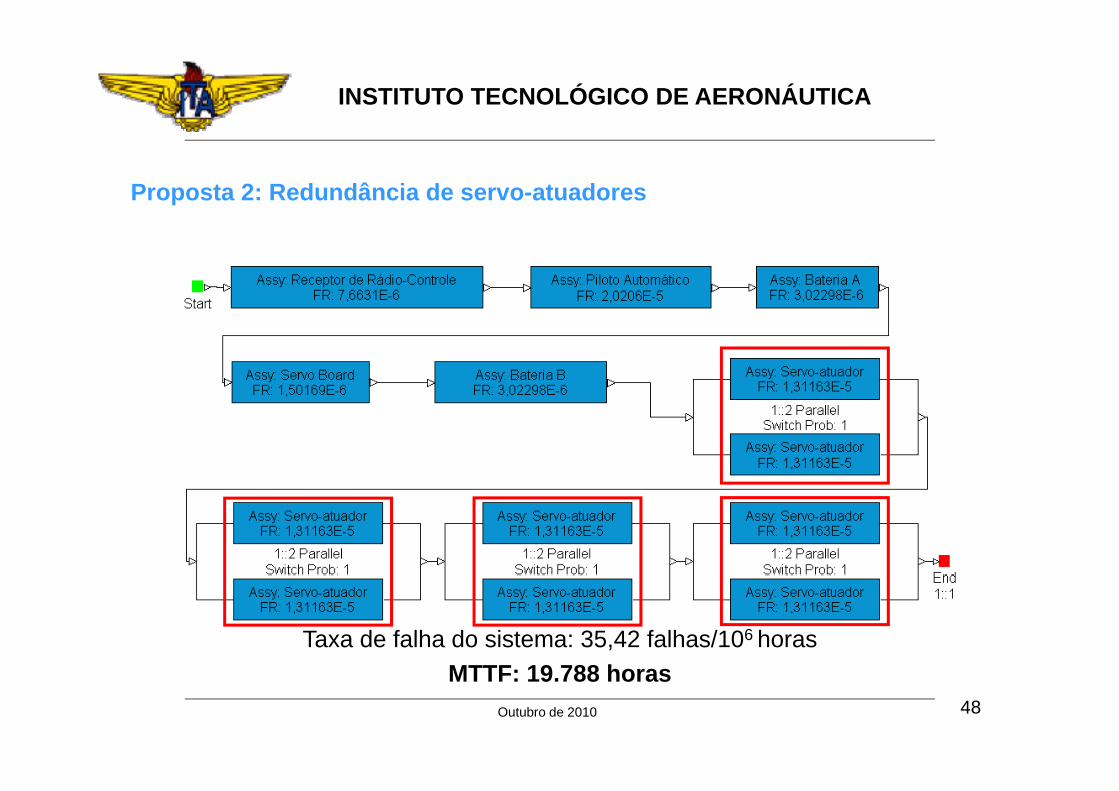
Proposta 2: Redundância de servo-atuadores
Taxa de falha do sistema: 35,42 falhas/106 horasMTTF 19 788 h
Outubro de 2010 48
MTTF: 19.788 horas
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
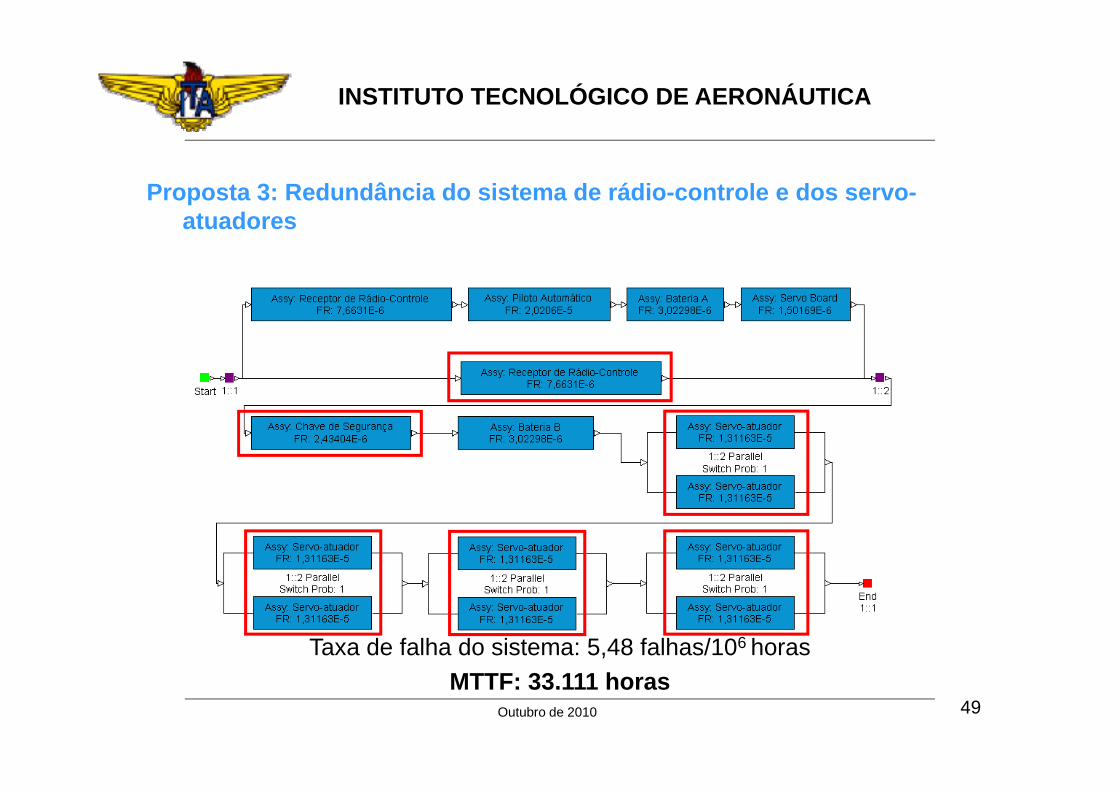
Proposta 3: Redundância do sistema de rádio-controle e dos servo-t datuadores
Taxa de falha do sistema: 5,48 falhas/106 horas
Outubro de 2010 49MTTF: 33.111 horas
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
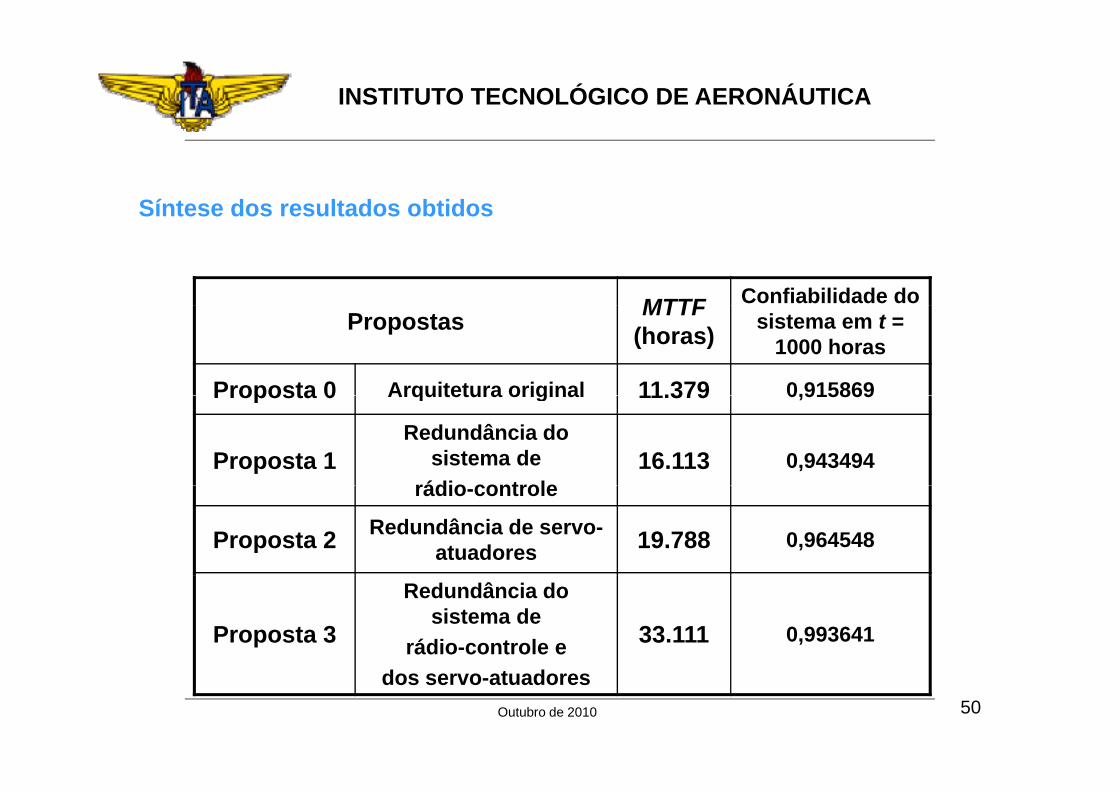
Síntese dos resultados obtidosSíntese dos resultados obtidos
MTTF Confiabilidade do Propostas MTTF
(horas) sistema em t = 1000 horas
Proposta 0 Arquitetura original 11.379 0,915869Proposta 0 Arquitetura original 11.379 0,915869
Proposta 1Redundância do
sistema de rádio controle
16.113 0,943494rádio-controle
Proposta 2 Redundância de servo-atuadores 19.788 0,964548
Proposta 3
Redundância do sistema de
rádio-controle e 33.111 0,993641
Outubro de 2010 50dos servo-atuadores
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Acionamento da Redundância
Outubro de 2010 51
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Meta 3 Sistema de Apontamento e Imageamento EmbarcadoMeta 3 – Sistema de Apontamento e Imageamento Embarcado
AERONAVE DELTA IIAERONAVE DELTA II
P d C it d Mi ãProva de Conceito da Missão
Outubro de 2010 52
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave Delta IIAeronave Delta II
• Adquirida uma plataforma aérea com capacidade de carga útil de 10 kg.
• A aeronave será equipada com a aviônica parcialmente testada.A aeronave será equipada com a aviônica parcialmente testada.• Será utilizado um sistema de comunicação de dados de alcance
10 vezes maior do que aquele utilizado na aeronave Delta I.• Será instalado um sistema de imageamento com gimbal e• Será instalado um sistema de imageamento com gimbal e
sistema de transmissão de vídeo de longa distância.• O objetivo será validar a solução de imageamento escolhida.
Outubro de 2010 53
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
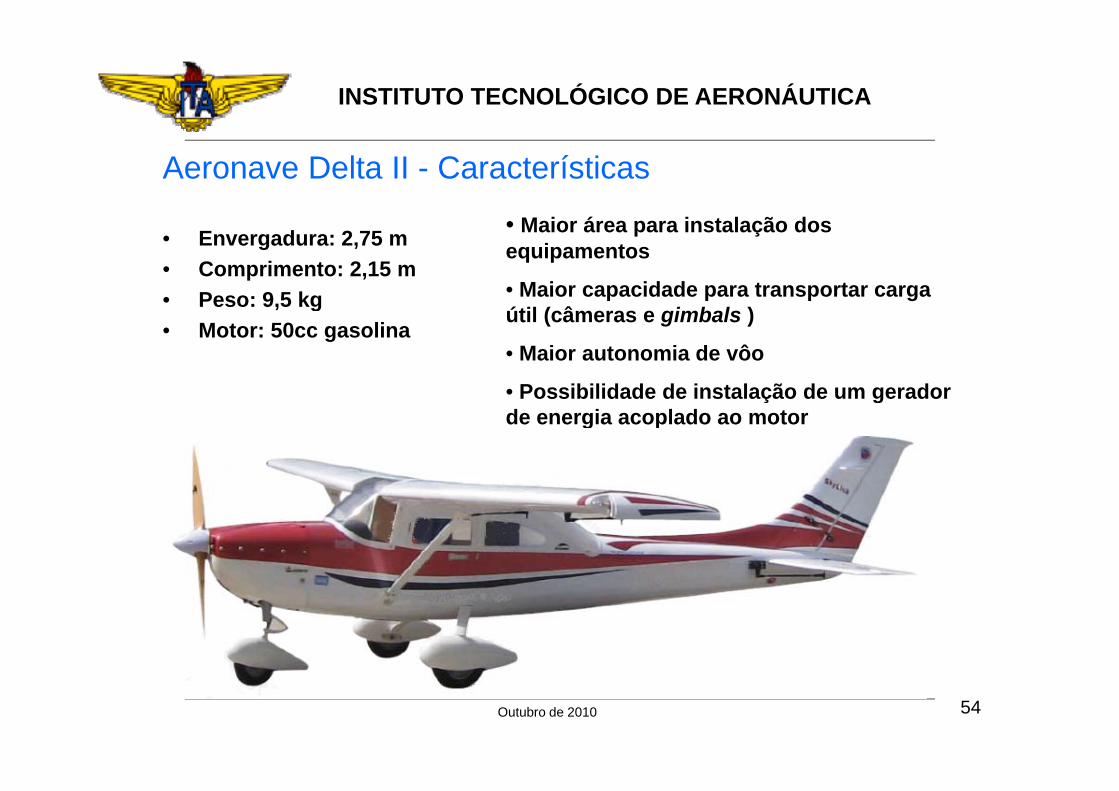
Aeronave Delta II - Características
• Envergadura: 2,75 m• Comprimento: 2,15 m• Peso: 9,5 kg
• Maior área para instalação dos equipamentos
• Maior capacidade para transportar carga Peso: 9,5 kg• Motor: 50cc gasolina
útil (câmeras e gimbals )
• Maior autonomia de vôo
• Possibilidade de instalação de um geradorPossibilidade de instalação de um gerador de energia acoplado ao motor
Outubro de 2010 54
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
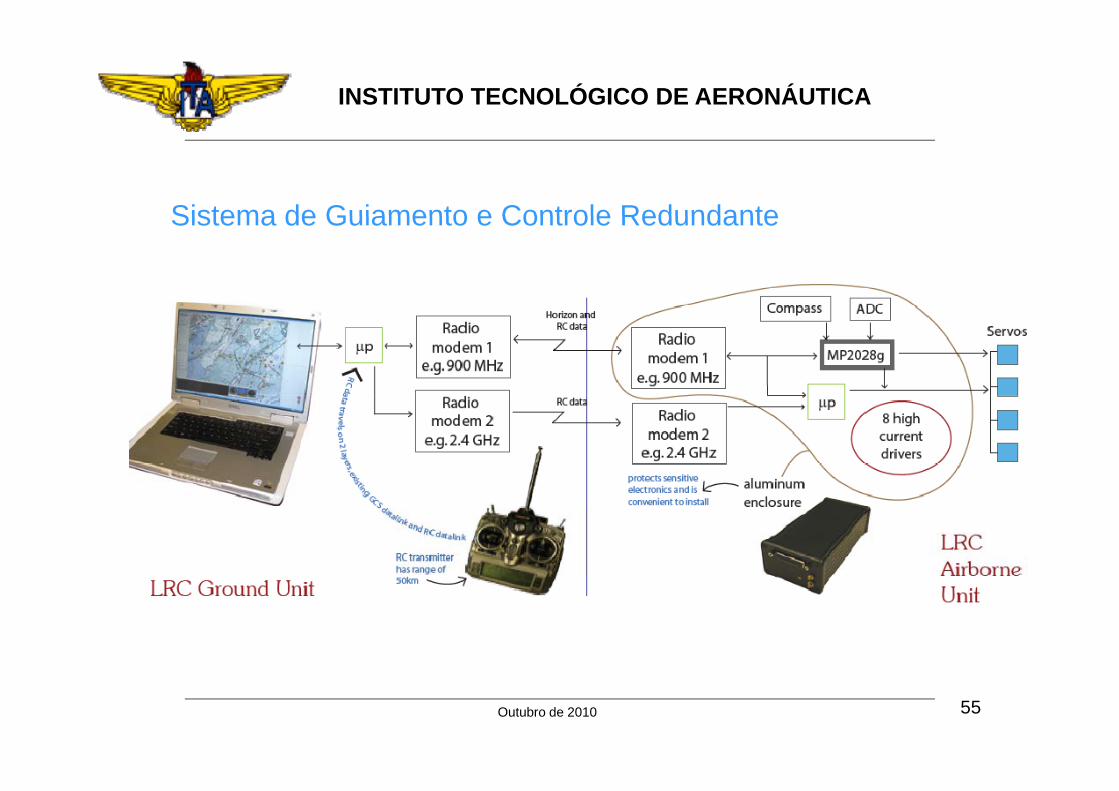
Sistema de Guiamento e Controle RedundanteSistema de Guiamento e Controle Redundante
Outubro de 2010 55

INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave Delta II – Gimbal
Outubro de 2010 56
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Meta 4 Plataforma Aérea de Asas RotativasMeta 4 – Plataforma Aérea de Asas Rotativas
AERONAVE GAMAAERONAVE GAMA
P d C it d Mi ãProva de Conceito da Missão
Outubro de 2010 57
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Aeronave Gama
• Foi adquirida uma plataforma aérea de asa rotativa com aviônica de guiamento e controle para testes em campo.
• O objetivo será validar a solução de asa rotativa para aplicações• O objetivo será validar a solução de asa rotativa para aplicações específicas de inspeção detalhada de elementos de linhas de transmissão.Esta solução deverá ter funcionalidade complementar com• Esta solução deverá ter funcionalidade complementar com relação à solução que usa plataforma de asa fixa.
Outubro de 2010 58
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
ObrigadoObrigado
Outubro de 2010 59




























