Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DO PARANÁ
SETOR DE TECNOLOGIA
CURSO DE ENGENHARIA ELÉTRICA
Otimização da modelagem e
simulação de reguladores aplicados
à aerogeradores Trabalho de Conclusão de Curso
Aluna: Mariely Lopes
GRR: 20062713
Professor Orientador: Clodomiro Unsihuay Vila, Dr.
Junho de 2011

UNIVERSIDADE FEDERAL DO PARANÁ
SETOR DE TECNOLOGIA
CURSO DE ENGENHARIA ELÉTRICA
Otimização da modelagem e
simulação de reguladores aplicados
à aerogeradores Trabalho de Conclusão de Curso
Trabalho apresentado à coordenação do
curso de Engenharia Elétrica, da
Universidade Federal do Paraná por ocasião
do trabalho de conclusão de curso referente
à disciplina TE105 – Projeto de Graduação.
Aluna: Mariely Lopes
GRR: 20062713
Professor Orientador: Clodomiro Unsihuay Vila, Dr.
Comissão avaliadora: Vilson Roiz Gonçalves Rebelo da Silva, M.Sc.
João Américo Vilela Junior, Dr.
Junho de 2011

RESUMO
Este trabalho de conclusão de curso aborda o tema da otimização da modelagem e simulação de reguladores aplicados à aerogeradores usando os modelos CRONE (Comando Robusto de Ordem Não Inteira) e FAST, respectivamente. Na Toolbox CRONE original o usuário pode modificar manualmente alguns parâmetros do regulador. A qualidade da modelagem dependerá da quantidade de tentativas e erros e da experiência do usuário. Este trabalho propõe “automatizar” a modelagem ótima do regulador através da inserção de três novos critérios de otimização dos parâmetros no cálculo do regulador. Resultados apresentados neste trabalho mostram que com a metodologia proposta é possível efetuar uma modelagem ótima e confiável de um regulador, fazendo que o modelo CRONE se converta numa ferramenta mais simples e mais rápida. Na sequência foi efetuada a simulação do regulador “ótimo” com o auxílio do programa FAST de simulação de aerogeradores.
Palavras-Chave: Controle robusto, comando CRONE, controle de aerogeradores, caixa de ferramentas MATLAB.
ABSTRACT
This monograph tackles with the thematic of modeling and optimization of CRONE controllers (Non Integer Order Robust Control) and simulating them using the FAST code. With the CRONE Toolbox, the user can manually modify some parameters of the regulator. The quality of the modeling depends on the amount of trial and error and the user’s experience. This study proposes to “automate” the optimum modeling of the regulator by inserting three new optimization criteria (for the parameters). The result shows that with the proposed methodology the optimal synthesis is possible, thus the CRONE Toolbox is improved. Afterwards, the regulators are simulated in a wind turbine model with the FAST code.
Keywords: Robust control, CRONE control design, wind turbine control, MATLAB toolbox.
AGRADECIMENTOS
Agradeço ao professor Clodomiro pela disposição para me orientar, pelos
inúmeros conselhos e ideias, sempre me motivando e me apoiando. Obrigada aos
professores Vilson e João, avaliadores do trabalho.
Obrigada à equipe VALOREM que me acolheu muito bem durante meu
estágio no seio da empresa, todos abertos para esclarecimentos sobre a produção
da energia eólica. Obrigada a Serge Gracia, diretor de VALEOL por me proporcionar
viagens formadoras a parques eólicos. Agradecimentos especiais a Benjamin
Feytout e Bastien Gaillardon, os quais compartilharam informações técnicas, me
ajudaram em todos os momentos em que precisei e me deram motivação para a
realização deste projeto.
Obrigada à equipe CRONE e outros colegas de trabalho do laboratório IMS,
especialmente aos meus tutores Patrick Lanusse e Jocelyn Sabatier, pelo
acompanhamento do projeto e esclarecimento de dúvidas em todas as fases do
desenvolvimento do trabalho.
Obrigada aos meus familiares e amigos que de alguma forma me ajudaram
e me apoiaram no desenvolvimento desse trabalho. Acima de tudo eu agradeço aos
meus pais, à Fer e ao Leo, minhas fontes de energia nos momentos os quais eu
precisei.
Muito obrigada a todos!

SUMÁRIO
1 INTRODUÇÃO ........................................................................................................................... 10
1.1 INTRODUÇÃO ......................................................................................................................... 10
1.2 OBJETIVOS ............................................................................................................................. 11
1.2.1 Objetivos Gerais ............................................................................................................ 11
1.2.2 Objetivos Específicos .................................................................................................... 11
1.3 JUSTIFICATIVA ....................................................................................................................... 12
1.4 METODOLOGIA ...................................................................................................................... 12
2 OTIMIZAÇÃO DO CALCULO DE LEIS DE COMANDO CRONE ................................... 15
2.1 PRINCÍPIOS DO COMANDO CRONE ....................................................................................... 15
2.2 CRONE TOOLBOX – CRONE CSD DE TERCEIRA GERAÇÃO ................................................ 23
2.3 PROBLEMA DE OTIMIZAÇÃO ................................................................................................. 26
2.3.1 Função objetivo MinEnergia ........................................................................................ 27
2.3.2 Funções objetivo MinGSs e MinSs ............................................................................... 28
2.4 OTIMIZAÇÃO APLICADA NA CAIXA DE FERRAMENTAS CRONE CSD ................................... 29
2.5 CONCLUSÃO SOBRE OS CRITÉRIOS DE OTIMIZAÇÃO .............................................................. 34
3 MODELO DE UM AEROGERADOR...................................................................................... 36
3.1 INTRODUÇÃO SOBRE A ENERGIA EÓLICA .............................................................................. 36
3.2 AEROGERADOR ...................................................................................................................... 37
3.3 CONTROLE DE UM AEROGERADOR ........................................................................................ 38
3.4 MODELOS ESTUDADOS .......................................................................................................... 39
3.4.1 Aerogerador composto de uma máquina síncrona (Modelo 1) ..................................... 39
3.4.2 Modelo obtido a partir da linearização com o programa FAST de um aerogerador em
torno de 5 pontos de funcionamento (Modelo 2) .......................................................................... 42
3.5 SÍNTESE DAS LEIS DE COMANDO ........................................................................................... 44
3.5.1 Controle do aerogerador composto de uma máquina síncrona (modelo 1) ................. 44
3.5.2 Controle do aerogerador linearizado a partir de FAST (modelo 2) ............................. 45
3.6 CONCLUSÃO SOBRE OS CRITÉRIOS DE OTIMIZAÇÃO APLICADOS A MODELOS DE
AEROGERADOR .................................................................................................................................. 49

4 ESTUDO DO REGULADOR COM O PROGRAMA FAST .................................................. 50
4.1 INTRODUÇÃO ......................................................................................................................... 50
4.2 CRIAÇÃO DA REFERÊNCIA ..................................................................................................... 52
4.3 ANÁLISE DA RESPOSTA AO DEGRAU ...................................................................................... 53
4.4 CONCLUSÃO .......................................................................................................................... 57
4.5 TRABALHOS FUTUROS ........................................................................................................... 58
5 CONCLUSÃO ............................................................................................................................. 59
REFERÊNCIAS .................................................................................................................................. 61
ANEXOS .............................................................................................................................................. 64
A. CRONOGRAMA ........................................................................................................................ 65
B. ESTUDO DO CRITÉRIO ENERGIA ....................................................................................... 66
C. FIGURAS COMPLEMENTARES DOS RESULTADOS DA OTIMIZAÇÃO .................... 69

LISTA DE FIGURAS
Figura 1.1 - Abordagem metodológica da teoria de simulação. (Fonte: [19][20]) ______________ 13
Figura 2.1 – Diagrama de blocos de um sistema de controle robusto (Fonte: [3]) ______________ 15
Figura 2.2 - Exemplo de diagramas de Bode e Nichols de uma planta incerta. _________________ 16
Figura 2.3 – Diagrama do sistema controlado __________________________________________ 17
Figura 2.4 - Diagrama de Bode assintótico do regulador CRONE ideal (a) e realizável (b) para uma
ordem não inteira n ϵ [0;1]. ____________________________________________________ 19
Figura 2.5 - Diagrama de Black-Nichols de um sistema controlado por um regulador CRONE de
segunda geração. _____________________________________________________________ 20
Figura 2.6 - Exemplos de gabaritos. __________________________________________________ 21
Figura 2.7 – Gabaritos da função de transferência em malha aberta no diagrama de Black-Nichols.
(a) Gabarito generalizado entre as frequências ωA e ωB, (b) multi-gabarito, (c) gabarito
curvilíneo. __________________________________________________________________ 21
Figura 2.8 - Otimização do gabarito: influência dos parâmetros a, b, ωl e ωh no diagrama de Nichols
assintótico de β(s). ____________________________________________________________ 22
Figura 2.9 - CRONE Toolbox de terceira geração. _______________________________________ 25
Figura 2.10 – Representação das iterações manuais que devem ser feitas na busca pelo regulador
ideal com a Toolbox CRONE de terceira geração. ___________________________________ 27
Figura 2.11 - Sistema controlado com realimentação. A planta é representada por G(s) e o regulador
por C(s). ____________________________________________________________________ 27
Figura 2.12 - Modificação dos limites das funções de sensibilidade para as simulações __________ 30
Figura 2.13 - Comparação das funções de sensibilidade da otimização com os critérios MinGSs,
MinSs e MinEnergia e a resposta ótima do exemplo. _________________________________ 31
Figura 2.14 - Comparação das funções de sensibilidade da otimização com os critérios MinGSs,
MinSs e MinEnergia (calculado em escala logarítmica) e a resposta ótima do exemplo. Detalhe
na região de interesse. _________________________________________________________ 33
Figura 3.1 - Exemplo de aerogerador onde as flechas azuis representam o vento. (Fonte: Wikipédia
em francês: http://fr.wikipedia.org/wiki/Eolienne) ___________________________________ 37
Figura 3.2 - Arquitetura do aerogerador do modelo 1 (Fonte: [11]) _________________________ 40
Figura 3.3 - Trem epicicloidal (Fonte: [11]) ___________________________________________ 40
Figura 3.4 - Diagramas de Bode (a) e Nichols (b) do modelo do aerogerador (modelo 1). ________ 41
Figura 3.5 - Sistema controlado onde G(s) é o modelo do aerogerador (modelo 2). _____________ 43
Figura 3.6 - Diagrama de Bode do modelo obtido com o programa FAST. ____________________ 44
Figura 3.7 - Modelo de aerogerador 2. Comparação da otimização realizada com os diferentes
critérios, sendo CRONE Original a otimização feita com a Toolbox CRONE sem modificações..47

Figura 3.8 - Modelo de aerogerador 2. Comparação da otimização realizada com os diferentes
critérios, sendo CRONE Original a otimização feita com a Toolbox CRONE sem modificações.
Detalhe na região de interesse. __________________________________________________ 48
Figura 4.1 - Esquema Simulink de testes do sistema em malha fechada. ______________________ 51
Figura 4.2 - Bloco Simulink de criação da referência. ____________________________________ 52
Figura 4.3 – Bloco Simulink do regulador. _____________________________________________ 52
Figura 4.4 – Perfil de vento utilizado para o teste do regulador. ____________________________ 54
Figura 4.5 – Velocidade de rotação do eixo rápido – sinal de referência e respostas dos sistemas
contendo os reguladores calculados com os diferentes critérios. ________________________ 54
Figura 4.6 – Velocidade de rotação do eixo rápido. Detalhe na resposta para o degrau de vento de 4
a 5 m/s. ____________________________________________________________________ 55
Figura 4.7 – Aerogerador de velocidade variável e regulação de pitch. (Fonte: [21]) ___________ 56
Figura 4.8 – Torque eletromagnético (a) e potência (b) do sistema para o degrau de velocidade de
vento de 4 a 5 m/s. Comparação entre os reguladores calculados com os três critérios. _____ 57
Figura B.1 - Primeiro caso de estudo do critério de minimização do erro (ωi= ωu). (a) Resposta ao
degrau unitário; (b) função de sensibilidade complementar; (c) energia instantânea do erro,
sendo Et a energia total do erro calculada no domínio do tempo; (d) representação em
frequência do critério estudado, sendo Et a energia total do erro calculada no domínio da
frequência . _________________________________________________________________ 67
Figura B.2 - Segundo caso de estudo do critério de minimização do erro (ωu=1 rad/s e ωi variável).
(a) Resposta ao degrau unitário; (b) função de sensibilidade complementar; (c) energia
instantânea do erro, sendo Et a energia total do erro calculada no domínio do tempo; (d)
representação em frequência do critério estudado, sendo Et a energia total do erro calculada no
domínio da frequência . ________________________________________________________ 68
Figura C.1 - Comparação das funções de sensibilidade da otimização com o critério MinEnergia
calculado em escala linear e logarítmica. __________________________________________ 70
Figura C.2 - Comparação das funções de sensibilidade da otimização com os critérios MinGSs, MinSs
e MinEnergia (calculado em escala logarítmica) e a resposta ótima do exemplo. Os reguladores
calculados com os critérios propostos possuem um único gabarito, enquanto o regulador no
exemplo possui também gabaritos em alta e baixa frequência. _________________________ 71
Figura C.3 - Comparação das funções de sensibilidade da otimização com os critérios MinGSs, MinSs
e MinEnergia (calculado em escala logarítmica) e a resposta ótima do exemplo. Os reguladores
assim como o exemplo possuem gabaritos em alta e baixa frequência. ___________________ 72
Figura C.4 - Idem figura C.3 - Detalhe nas regiões de interesse. ____________________________ 73
Figura C.5 - Modelo de aerogerador 1. Comparação da utilização dos diferentes critérios para a
otimização do regulador. _______________________________________________________ 74

LISTA DE TABELAS
Tabela 2.1 – Comparação entre as performances dos reguladores calculados com os critérios
propostos (único gabarito) e o regulador do exemplo (multi-gabaritos). __________________ 32
Tabela 2.2 – Comparação entre as performances dos reguladores calculados com os critérios
propostos e com multi-gabaritos e o regulador do exemplo, também multi-gabaritos. _______ 34
Tabela 3.1 – Modelo 2 do aerogerador. Comparação entre as performances dos reguladores
calculados com os critérios propostos e aquele existente na Toolbox CRONE. _____________ 46
Tabela 4.1 – Comparação dos valores de overshoot da resposta ao degrau para os diferentes
reguladores (calculados à partir dos critérios MinSs, MinGSs e MinEnergia). _____________ 55
Tabela A.1 – Cronograma. __________________________________________________________ 65
10
1 INTRODUÇÃO
1.1 INTRODUÇÃO
A teoria de controle de sistemas dinâmicos possui diversas técnicas de
controle, divididas em controle clássico e controle moderno. O objeto de estudo
deste trabalho é o controle robusto, o qual faz parte da teoria de controle moderno.
O estudo será feito mais especificamente a respeito das leis de comando CRONE
(Comando Robusto de Ordem Não Inteira)[1, 2]. O objetivo é aperfeiçoar o método
de cálculo dos reguladores CRONE. Busca-se assim melhorar as performances da
caixa de ferramentas CRONE para MATLAB, através da automatização da
otimização do cálculo do regulador.
Para aplicar os novos métodos de otimização, o cálculo de um regulador
para um aerogerador será feito com a ajuda do programa FAST1 [15]. de simulação
de aerogeradores. O interesse da aplicação na energia eólica se deve ao fato desta
fonte de energia renovável mostrar um grande desenvolvimento nos últimos anos. O
Brasil atingiu recentemente a marca dos 1GW instalados representando 1% da
matriz energética brasileira2. A previsão para 2013 são 5,2GW instalados.
Esse trabalho de conclusão de curso é do tipo experimental, pois tem como
objetivo aprimorar uma técnica de cálculo de reguladores e aplicá-la a um sistema
específico, os aerogeradores. Ele está dividido da seguinte maneira: o capítulo 2
apresenta uma introdução à metodologia de cálculo de reguladores CRONE; o
capítulo 3 trata dos critérios de otimização, objeto de estudo desse trabalho; e o
capítulo 4 aplica os reguladores estudados a aerogeradores objetivando sua
1 FAST : Programa de simulação de um aerogerador desenvolvido pelo laboratório NREL [15].
2 O montante foi alcançado após a entrada em operação de Tramandaí, em 23 de maio de 2011. Fonte: Jornal da Energia: Brasil atinge 1GW em parques eólicos em operação comercial. Disponível em http://www.jornaldaenergia.com.br/ler_noticia.php?id_noticia=6599&id_tipo=3&id_secao=9&id_pai=2
11
validação. Finalmente uma conclusão tratará das perspectivas para a continuação
do trabalho. O cronograma encontra-se no anexo A.
O programa MATLAB 7.12.0.635 (2011a) foi utilizado nos cálculos e na
criação das figuras. O programa FAST v7.00.0 foi utilizado na modelagem e
simulação do aerogerador.
1.2 OBJETIVOS
1.2.1 Objetivos Gerais
Automatizar o método de cálculo dos reguladores CRONE de terceira
geração na caixa de ferramentas para MATLAB CRONE CSD. Utilizar o método
desenvolvido no cálculo de um regulador destinado ao controle de um aerogerador
modelado e simulado com o programa FAST.
1.2.2 Objetivos Específicos
Propor e testar novos critérios de otimização utilizados para o cálculo dos
reguladores CRONE de terceira geração;
Definir um modelo de aerogerador a partir do programa de simulação de
aerogeradores FAST. Calcular um regulador CRONE para o mesmo, utilizando
os novos critérios de otimização. Verificar as performances temporais do sistema
controlado.

12
1.3 JUSTIFICATIVA
O uso da caixa de ferramentas MATLAB CRONE CSD (CRONE Toolbox)
exige alto nível de conhecimento técnico em controle e mais especificamente no
comando de ordem não inteira. A automatização do cálculo do regulador facilitará a
utilização desta ferramenta tornando-a acessível a um público mais abrangente.
Sendo assim, esse trabalho contribuirá à comunidade científica da área de controle
permitindo o acesso mais fácil a um software já existente.
O cálculo de um regulador utilizando os novos critérios de otimização
permite a verificação da eficiência do método, além de aplicar o trabalho
desenvolvido. O regulador calculado poderá ser utilizado posteriormente a este
trabalho principalmente para dois estudos: seu método de implantação e sua
influência nos esforços mecânicos na estrutura do aerogerador em casos de ventos
extremos e ao longo do tempo3.
1.4 METODOLOGIA
Estudo de dissertações existentes sobre controle de aerogeradores;
Estudo da teoria de controle robusto CRONE;
Utilização da caixa de ferramentas CRONE CDS;
Estudo da teoria de otimização;
Utilização do programa MATLAB e da sua caixa de ferramentas de otimização
(Optimization Toolbox);
3 Wind turbine load calculations – simulações realizadas para todos os modelos de aerogeradores visando a certificação necessária para a comercialização.

Conceitos de modelagem do comportamento aerodinâmic
Utilização do programa FAST para a criação de um modelo
para a simulação do sistema controlado
A figura 1.1 é uma representação gr
utilizada, baseada na teoria de simulação
Figura 1.1 - Abordagem metodológica da teoria de simulação
Um modelo de referência foi criado na etapa de concepção
objetivos e a definição do sistema estão descritos nas seções
trabalho. A formulação do problema e o modelo abstrato correspondem à definição
dos critérios de otimização
conceitual encontram-se
segunda etapa, de implementação, é definida na
de otimização propostos são i
validação do sistema é feita. O modelo operacional é definido na etapa de an
correspondendo à definição dos modelos de aerogeradores (seção 3.4). A
experimentação do modelo corresponde à s
Conceitos de modelagem do comportamento aerodinâmico dos aerogeradores;
Utilização do programa FAST para a criação de um modelo
do sistema controlado;
A figura 1.1 é uma representação gráfica da abordagem metodol
utilizada, baseada na teoria de simulação [19].
Abordagem metodológica da teoria de simulação. (Fonte:
Um modelo de referência foi criado na etapa de concepção
vos e a definição do sistema estão descritos nas seções
trabalho. A formulação do problema e o modelo abstrato correspondem à definição
imização (seção 2.3). A representação do modelo e o modelo
se na definição das funções objetivo (seções 2.3.1 e 2.3.2)
segunda etapa, de implementação, é definida nas seções 2.4 e 2.5, onde os critérios
de otimização propostos são implantados na Toolbox CRONE
validação do sistema é feita. O modelo operacional é definido na etapa de an
correspondendo à definição dos modelos de aerogeradores (seção 3.4). A
experimentação do modelo corresponde à síntese das leis de
13
o dos aerogeradores;
Utilização do programa FAST para a criação de um modelo de aerogerador e
fica da abordagem metodológica
(Fonte: [19][20])
Um modelo de referência foi criado na etapa de concepção. Nesta etapa, os
vos e a definição do sistema estão descritos nas seções 1.2, 2.1 e 2.2 deste
trabalho. A formulação do problema e o modelo abstrato correspondem à definição
. A representação do modelo e o modelo
(seções 2.3.1 e 2.3.2). A
2.4 e 2.5, onde os critérios
Toolbox CRONE e uma primeira
validação do sistema é feita. O modelo operacional é definido na etapa de análise,
correspondendo à definição dos modelos de aerogeradores (seção 3.4). A
ntese das leis de comando na seção

14
3.5. Os resultados experimentais e a análise são mostrados nas seções 3.5, 3.6 e no
capítulo 4, o qual faz o estudo do sistema controlado no domínio do tempo.

15
2 OTIMIZAÇÃO DO CALCULO DE LEIS DE COMANDO CRONE
2.1 PRINCÍPIOS DO COMANDO CRONE
O comando CRONE (Commande Robuste d’Ordre Non Entier - Comando
Robusto de Ordem Não Inteira em francês) é um método de cálculo de reguladores
robustos baseado em diferenciações de ordem fracionária.
Controle robusto é aquele que busca uma solução ao problema do controle
levando em consideração as incertezas do modelo matemático do sistema. Essas
incertezas podem ser classificadas como estruturadas ou não estruturadas, e
paramétricas ou não paramétricas. O princípio do controle robusto é minimizar a
influência das incertezas e das perturbações que atuam no sistema. O problema
pode ser dividido em duas partes: a estabilidade robusta e o desempenho robusto. O
primeiro busca manter o sistema estável para o conjunto estados paramétricos
incertos da planta e o segundo busca manter as performances desejadas para o
sistema sendo ele submetido às perturbações externas ou variações da planta [3]. A
metodologia CRONE considera a robustez do grau de estabilidade, mantendo assim
as performances dinâmicas do sistema independentes das variações da planta [4]. A
figura 2.1 representa um esquema geral de um sistema de controle robusto.
Figura 2.1 – Diagrama de blocos de um sistema de controle robusto (Fonte: [3])
16
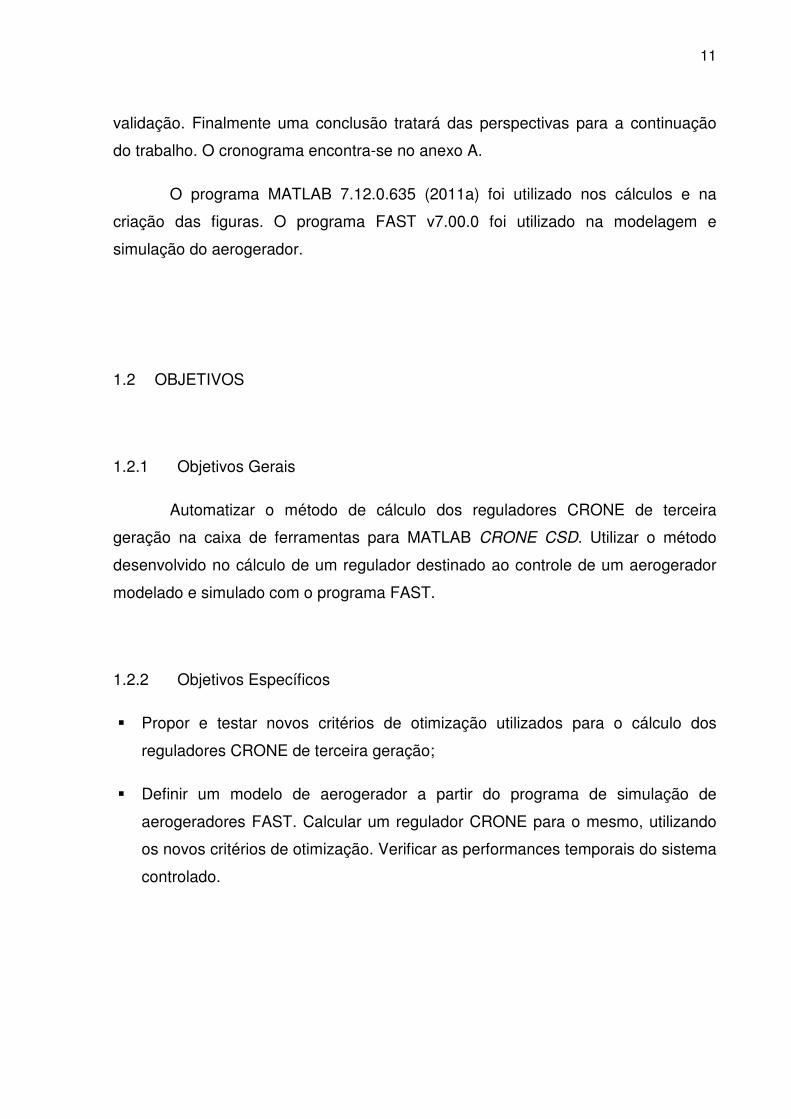
Seja a planta incerta estudada, representa a planta nominal e
∆ suas incertezas (equação 2.1). A figura 2.2 mostra um exemplo de uma planta
incerta em ganho.
= + ∆ 2.1
Figura 2.2 - Exemplo de diagramas de Bode e Nichols de uma planta incerta. Pode-se verificar que as incertezas são no módulo da planta, pois a fase não varia e os traços das incertezas no diagrama
de Nichols são verticais. (Exemplo de planta fornecido com a Toolbox CRONE)
O comando robusto CRONE é utilizado em sistemas da forma de
realimentação (feedback) (Figura 2.3), na qual G(s) representa a planta e C(s)
representa o regulador. O sinal de referência r(t) pode ser precedido por uma
filtragem (F), a qual não é estudada no cálculo do regulador CRONE. O sinal de
entrada do sistema é assim o sinal e(t), e y(t) é o sinal de saída. O comando é
representado por u(t). Os sinais du(t), dy(t) e dm(t) representam respectivamente as
perturbações de entrada da planta, de saída do sistema e o ruído de medida. O
sistema em malha aberta é representado por β(s) (equação 2.2).
= . 2.2
10-5
100
105
1010
-400
-300
-200
-100
0
100Diagrama de Bode da planta
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-180
-160
-140
-120
-100
-80
Fas
e (°
)
Frequência (rad/s)
Planta nominal
Planta com o ganho máximoPlanta com o ganho mínimo
-200 -150 -100 -50-350
-300
-250
-200
-150
-100
-50
0
50
100Diagrama de Nichols da planta
Fase (°)
Mód
ulo
(dB
)

Figura 2.3 – Diagrama do sistema controladofiltragem da referência r(t). O sinal e(t) é a entrada do sistema, y(t) é a sinais du(t), dy(t) e dm(t) são respectivamente os
A concepção do regulador CRONE consiste na busca de uma
transferência em malha aberta
margens de estabilidade e das performances do sistema, particularmente
do pico de ressonância
ganho e a fase podem variar numa d
[6]. A margem de ganho
e a margem de fase é
frequência na qual o ganho do sistema em malha aberta é igual a um é a frequência
de ganho unitário (fu em Hz ou
O pico de ressonância é o valor
complementar, T(s) (com
entre a saída y(t) e a entrada e(t) do sistema em malha fechada. O valor de M
relacionado ao primeiro
(capacidade do sistema de se
sensibilidade que serão levadas em consideração no cá
função de sensibilidade
CS(s) (equação 2.5) e a sensibilidade relacionada aos
planta GS(s) (equação 2
s =yt
et=
o sistema controlado, onde G(s) representa a planta, C(s) o regulador e F a filtragem da referência r(t). O sinal e(t) é a entrada do sistema, y(t) é a saída
(t) são respectivamente os distúrbios de entrada da planta, de e o ruído de medida. (Fonte: [2])
do regulador CRONE consiste na busca de uma
transferência em malha aberta de ordem fracionária a qual garante a
de estabilidade e das performances do sistema, particularmente
[2]. As margens de estabilidade são os valores os quais o
ganho e a fase podem variar numa dada frequência sem tornar o sistema instável
é o valor do ganho quando a fase do sistema é igual
valor da fase do sistema quando o ganho é
ncia na qual o ganho do sistema em malha aberta é igual a um é a frequência
em Hz ou ωu em rad/s, com ω = 2.π. f).
O pico de ressonância é o valor máximo da função
, T(s) (com s σ jω) (equação 2.3), a qual representa a relação
y(t) e a entrada e(t) do sistema em malha fechada. O valor de M
relacionado ao primeiro overshoot da resposta ao degrau
capacidade do sistema de seguir o sinal de referência) [2][12]. Outras funções de
ão levadas em consideração no cálculo do regulador são:
S(s) (equação 2.4), a sensibilidade à entrada do sistema
e a sensibilidade relacionada aos distúrbios
2.6) [6].
yt
dt
ut
dt
Cs. Gs
1 Cs. Gs1
17
, onde G(s) representa a planta, C(s) o regulador e F a e u(t) é o comando. Os
de entrada da planta, de saída do sistema
do regulador CRONE consiste na busca de uma função de
ria a qual garante a robustez das
de estabilidade e das performances do sistema, particularmente a robustez
As margens de estabilidade são os valores os quais o
ada frequência sem tornar o sistema instável
fase do sistema é igual a -180°
valor da fase do sistema quando o ganho é igual a um. A
ncia na qual o ganho do sistema em malha aberta é igual a um é a frequência
da função de sensibilidade
, a qual representa a relação
y(t) e a entrada e(t) do sistema em malha fechada. O valor de Mr é
da resposta ao degrau em monitoramento
. Outras funções de
lculo do regulador são: a
, a sensibilidade à entrada do sistema
distúrbios de entrada da
βs
βs 2.3
18
s y(t)d(t) = y(t)d(t) = 11 + C(s). G(s) = 11 + β(s) 2.4
(s) = u(t)e(t) = − u(t)d(t) = − u(t)d(t) = C(s)1 + C(s). G(s) = C(s)1 + β(s) 2.5
(s) = y(t)d(t) = G(s)1 + C(s). G(s) = G(s)1 + β(s) 2.6
A partir da função de transferência de malha aberta ótima, β(s), o regulador
C(s) pode ser deduzido (equação 2.7). A otimização da função de malha aberta
fracionária permite a utilização de um número reduzido de parâmetros, diminuindo
assim a complexidade de cada iteração. A síntese do regulador na forma racional, o
qual possui numerosos parâmetros, é feita a partir da função de transferência em
malha aberta ótima. Esta é uma vantagem do método CRONE com relação ao
método de calculo de reguladores robustos QFT (Quantitative feedback theory), o
qual possui uma síntese iterativa do regulador com numerosos parâmetros.
() = ().∆G(s) ∴ β() = (). () = β ().∆β(s) ∴ () = β () () 2.7
Três estratégias são utilizadas para o cálculo dos reguladores CRONE. A
primeira consiste no desenvolvimento de um regulador de fase constante em torno
na frequência de ganho unitário ωu, garantindo assim a não influência do regulador
na margem de fase do sistema. Essa estratégia, chamada CRONE de primeira
geração, é utilizada em plantas com variações em módulo e de fase constante em
torno da frequência ωu.
A partir da função de transferência de malha aberta, o regulador de ordem
fracionária é calculado (CF(jω), equação 2.8) e em seguida ele é definido por uma
função de ordem inteira resultante de uma distribuição recursiva real de zeros e
pólos (CR(jω), equação 2.9) [1]. A figura 2.4 mostra um exemplo do regulador de N
pólos ωi e N zeros ωi’, distanciados de # = $%$%′
e & = $%'(′$% .
)() = *1 + /,-1 + /,./0 , 234 ,- < ,6 7 ,. > ,9 2.8
19
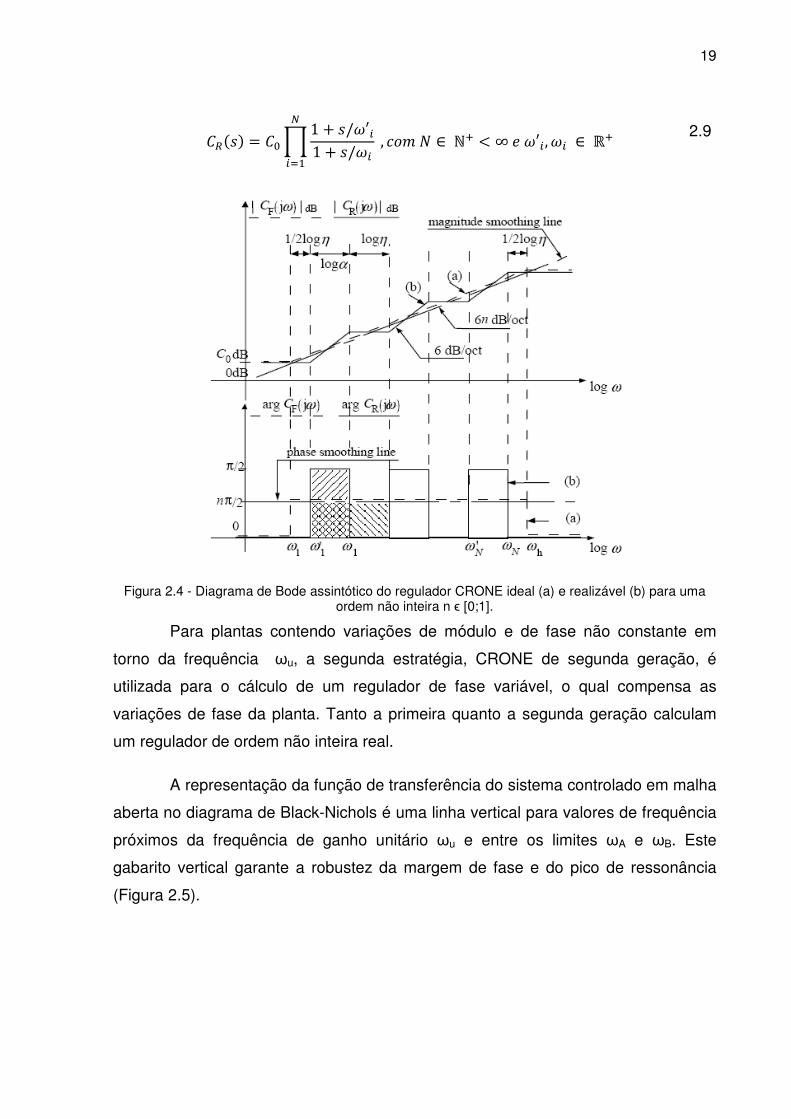
:() = ; 1 + /,′=1 + /,=>
=?@ , 234 A ∈ ℕD < ∞ 7 ,′=, ,= ∈ ℝD 2.9
Figura 2.4 - Diagrama de Bode assintótico do regulador CRONE ideal (a) e realizável (b) para uma ordem não inteira n ϵ [0;1].
Para plantas contendo variações de módulo e de fase não constante em
torno da frequência ωu, a segunda estratégia, CRONE de segunda geração, é
utilizada para o cálculo de um regulador de fase variável, o qual compensa as
variações de fase da planta. Tanto a primeira quanto a segunda geração calculam
um regulador de ordem não inteira real.
A representação da função de transferência do sistema controlado em malha
aberta no diagrama de Black-Nichols é uma linha vertical para valores de frequência
próximos da frequência de ganho unitário ωu e entre os limites ωA e ωB. Este
gabarito vertical garante a robustez da margem de fase e do pico de ressonância
(Figura 2.5).

20
Figura 2.5 - Diagrama de Black-Nichols de um sistema controlado por um regulador CRONE de segunda geração. O gabarito de forma vertical garante a robustez da margem de fase Mφ e do pico
de ressonância Mr para variações em torno da frequência de ganho unitário ωcg numa faixa de frequência entre ωA e ωB. (Fonte: [2])
Quando a planta estudada apresenta não somente incertezas de módulo,
mas de natureza variada, o gabarito vertical não é suficiente para garantir a
robustez, já que as incertezas não têm um perfil vertical no diagrama de Black-
Nichols. A estratégia CRONE de terceira geração busca um gabarito generalizado
descrito por uma função de transferência de ordem não inteira complexa, na qual a
ordem real determina a posição do gabarito com relação à fase, e a ordem
imaginária determina sua inclinação com relação à vertical. O objetivo é buscar uma
função de transferência em malha aberta a qual seja representada por um gabarito
tangencial a um contorno do diagrama de Black ou às curvas de isoamortecimento.
Os contornos do diagrama de Black representam um mesmo fator de ressonância
para todos os pontos da curva. Na análise do sistema no tempo, um mesmo fator de
ressonância garante um mesmo overshoot da resposta ao degrau de perturbação
(regulação) ou ao degrau do sinal de referência. As curvas de isoamortecimento
garantem um mesmo amortecimento da resposta em malha fechada para todos os
pontos da curva [4] (Figura 2.6), também para uma resposta ao degrau em
regulação ou em monitoramento.
21
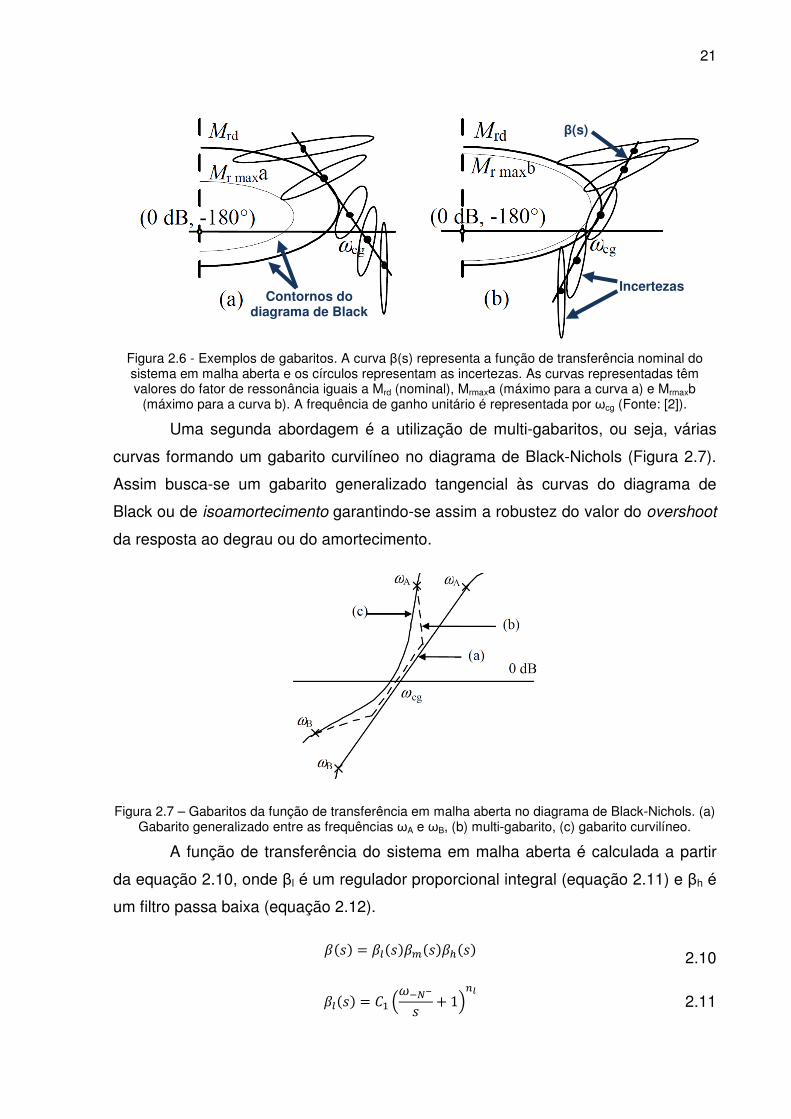
Figura 2.6 - Exemplos de gabaritos. A curva β(s) representa a função de transferência nominal do sistema em malha aberta e os círculos representam as incertezas. As curvas representadas têm valores do fator de ressonância iguais a Mrd (nominal), Mrmaxa (máximo para a curva a) e Mrmaxb
(máximo para a curva b). A frequência de ganho unitário é representada por ωcg (Fonte: [2]).
Uma segunda abordagem é a utilização de multi-gabaritos, ou seja, várias
curvas formando um gabarito curvilíneo no diagrama de Black-Nichols (Figura 2.7).
Assim busca-se um gabarito generalizado tangencial às curvas do diagrama de
Black ou de isoamortecimento garantindo-se assim a robustez do valor do overshoot
da resposta ao degrau ou do amortecimento.
Figura 2.7 – Gabaritos da função de transferência em malha aberta no diagrama de Black-Nichols. (a) Gabarito generalizado entre as frequências ωA e ωB, (b) multi-gabarito, (c) gabarito curvilíneo.
A função de transferência do sistema em malha aberta é calculada a partir
da equação 2.10, onde βl é um regulador proporcional integral (equação 2.11) e βh é
um filtro passa baixa (equação 2.12).
() = -()G().() 2.10
-() = @ H,I>J + 1K0L 2.11
Incertezas Contornos do
diagrama de Black
β(s)

22
.() = .H ,>' + 1K0M 2.12
A função βm representa o gabarito curvilíneo o qual é formado por uma soma
de gabaritos (equação 2.13) onde cada um deles é descrito pela equação 2.14.
G() = ; N()>'N?I>J 2.13
N() = NO=P0(QR) *#N 1 + /,ND@1 + /,N /ST Uℜ7/= WX#N 1 + ,ND@1 + ,NYZ[T\]
I^R O=P0(QR) 2.14
com S + Z[ ∈ ∀= 7 ∈ ∀` , onde ∀= e ∀` são respectivamente o plano complexo no
domínio do tempo e o plano complexo no domínio da frequência [2].
A definição da curva de β(s) ótima é facilitada devido à independência da
influência dos parâmetros a serem otimizados (ωl, ωh, a e b) na curva assintótica
para cada gabarito, como mostra a figura 2.8. Os parâmetros ωl e ωh correspondem
respectivamente aos parâmetros ωk e ωk+1 da equação 2.14.
Figura 2.8 - Otimização do gabarito: influência dos parâmetros a, b, ωl e ωh no diagrama de Nichols assintótico de β(s).
Durante o cálculo do regulador CRONE a otimização do gabarito é feita
buscando-se a redução do critério de otimização J (equação 2.15). Esse critério
representa a diferença entre o fator de ressonância nominal Mr0 e o fator de
ressonância máximo da planta incerta Mr (equação 2.16), garantindo assim a
23
robustez do overshoot da resposta ao degrau (do sinal de entrada ou da
perturbação).
a = bcdef − bc 2.15
bc = max$ (j,) 2.16
2.2 CRONE TOOLBOX – CRONE CSD DE TERCEIRA GERAÇÃO
A caixa de ferramentas (toolbox) do programa MATLAB chamada CRONE
foi desenvolvida na década de 90 pelo Laboratório IMS em Bordeaux, na França. Ela
concerne três temas de aplicação da derivação não inteira, módulos chamados
"Fractional Calculus", "System Identification by Fractional Model" e "CRONE CSD
(Control System Design)". O primeiro é um conjunto de algoritmos que permitem a
utilização da derivada não-inteira. O segundo tem como objetivo a identificação de
sistemas reais por modelos de ordem não inteira. O terceiro permite a síntese de leis
de comando lineares robustas para sistemas mono e multivariáveis, lineares ou não
lineares e estacionários ou não estacionários [1].
O comando CRONE (Toolbox “CRONE CSD”) possui três gerações. A
decisão de qual geração deve ser utilizada depende da planta, das suas incertezas e
das especificações do sistema. Estas especificações podem ser relacionadas ao
tempo de resposta, ao grau de estabilidade, à precisão em regime permanente,
assim como às quatro funções sensibilidade (T(s), S(s),CS(s) e GS(s)) [2].
O estudo desse trabalho será feito com a Toolbox CRONE de terceira
geração, a qual tem a forma mostrada na figura 2.9. O botão “Optim.” da Toolbox é
responsável pela otimização dos parâmetros da função β(s). Será nesta parte da
Toolbox que o método de otimização das leis de comando descrito pelas equações
2.15 e 2.16 será modificado.
A otimização é feita pela função “fmincon” da Optimization Toolbox de
MATLAB. Essa função tem como objetivo minimizar uma função objetivo (neste caso

24
a função que calcula Mr) levando em considerações certas restrições. No caso da
Toolbox CRONE as restrições são os limites das funções de sensibilidade, além da
diferença entre o fator de ressonância nominal e o fator de ressonância máximo do
sistema.
Esta seção pôde esclarecer os princípios do cálculo das leis de comando
CRONE, além de mostrar como a ferramenta CRONE no MATLAB é utilizada. A
seçao seguinte abordara a aplicação de novos métodos de otimização na Toolbox
CRONE.

25
Figura 2.9 - CRONE Toolbox de terceira geração.
26
2.3 PROBLEMA DE OTIMIZAÇÃO
Um problema de otimização é baseado em três pontos principais: a
codificação do problema, a função que se deseja minimizar ou maximizar e o espaço
de soluções associado [10]. Neste trabalho três funções são estudadas, chamadas
de “critérios de otimização”: a minimização do erro da resposta a um degrau na
entrada do sistema; a minimização da função S(s)/s; e a minimização de uma função
relacionada aos distúrbios de entrada da planta GS(s)/s. Estes critérios serão
denominados nesse documento de MinEnergia, MinSs e MinGSs, e serão
estudados em detalhes nas seções 2.3.1 e 2.3.2.
O sistema de otimização existente na Toolbox permite o cálculo dos
parâmetros ótimos dadas as restrições sobre o fator de ressonância e sobre as
funções de sensibilidade. Estas restrições são definidas pelo usuário e o programa é
responsável por obter um regulador que as respeite. Porém, normalmente as
performances máximas que o sistema pode atingir não são conhecidas antes do
cálculo do regulador. Por exemplo, deseja-se que o sistema rejeite as perturbações
num tempo máximo trp. A banda passante mínima da função de sensibilidade S(s)
pode ser calculada a partir do valor de trp. Numa situação em que se deseja
encontrar um sistema com um tempo de rejeição de perturbações o mais rápido
possível, o usuário deve fazer várias iterações manuais para chegar num sistema
ótimo (Figura 2.10), aumentando a complexidade do cálculo do regulador.
Os critérios aqui estudados buscam automatizar a otimização do regulador
com relação à rapidez de resposta (banda passante das funções T(s) e S(s)) e ao
amortecimento das oscilações.
A otimização do cálculo do regulador CRONE é feita com uma função de
transferência de ordem fracionária, a partir da qual se pode observar somente a
resposta em frequência do sistema. Para a obtenção da resposta no domínio do
tempo, é necessário o cálculo do regulador racional (exemplificado na equação 2.9),
aumentando o tempo de cálculo do regulador ótimo. Sendo assim, os critérios de
otimização estudados serão todos definidos no domínio do frequência.

Figura 2.10 – Representação das iterações manuais que devem ser feitas na busca pelo regulador ideal com a
2.3.1 Função objetivo
A medida do desempenho
observação do sinal de erro
minimização do sinal de erro
garante o calculo de JME
(equação 2.19).
Figura 2.11 - Sistema controlado com realimentação. A planta é representada por G(s) e o regulador por C(s). Os sinais e(t), s(t), d
perturbações de entrada da planta e o erro entre a entrada e a
Representação das iterações manuais que devem ser feitas na busca pelo regulador ideal com a Toolbox CRONE de terceira geração.
unção objetivo MinEnergia
desempenho de um sistema pode ser feita a
observação do sinal de erro (equação 2.17) [8]. O critério “MinEnergia”
minimização do sinal de erro da figura 2.11. O teorema de Parseval (equação
no domínio do tempo assim como no domínio
Sistema controlado com realimentação. A planta é representada por G(s) e o regulador por C(s). Os sinais e(t), s(t), du(t) e ε(t) representam respectivamente a entrada, a
perturbações de entrada da planta e o erro entre a entrada e a k(l) = m(l) − 7(l)
27
Representação das iterações manuais que devem ser feitas na busca pelo regulador
ser feita a partir da
. O critério “MinEnergia” JME busca a
O teorema de Parseval (equação 2.18)
domínio da frequência
Sistema controlado com realimentação. A planta é representada por G(s) e o regulador (t) representam respectivamente a entrada, a saída, as
perturbações de entrada da planta e o erro entre a entrada e a saída.
2.17

28
n |p(l)|qrIr sl = n |t(j,)|q2ur
Ir s, 2.18
avw = n |k(l)|qrIr sl = 12u n |k(j,)|qr
Ir s, 2.19
Considerando-se um sinal de entrada de forma de um degrau unitário, este
pode ser escrito no domínio da frequência como 7() = @O. Assim, o sinal de erro a
um degrau na entrada e(t) é descrito pela equação 2.20 no domínio da frequência.
kx(s) = 1s . 1
1 + C(s). G(s) = 1s . S(s) , 234 = j, 2.20
O interesse da minimização desse critério é aumentar a rapidez e o
amortecimento da resposta ao degrau do sistema. Para validar essas afirmações um
estudo foi feito o qual se encontra detalhado no anexo B.
2.3.2 Funções objetivo MinGSs e MinSs
Um critério alternativo ao critério da integral do erro ao quadrado
(MinEnergia, equação 2.19) é o critério chamado de “MinGSs” neste trabalho,
representado pela variável JGS na equação 2.21 [8]. Ele é uma medida da habilidade
do sistema de trabalhar com perturbações de carga de baixa frequência.
az = |1 ()|r = max$ 1
j, . (j,) = max$ ~ 1j, . (j,)
1 + (j,)(j,)~ 2.21
Segundo Kristiansson & Lennartson [9], outro critério, aqui representado por
JS (equação 2.22) e chamado de MinSs, pode ser um critério mais relevante que JGS
para problemas de servomecanismos (sistema de controle realimentado no qual a
saída é a posição, velocidade ou aceleração de um sistema mecânico [5]).
a = |1 ()|r = max$ 1
j, . (j,) = max$ 1j, . 1
1 + (j,)(j,) 2.22
A análise desses critérios será feita a partir de testes na Toolbox CRONE
(seção 2.4).
29
2.4 OTIMIZAÇÃO APLICADA NA CAIXA DE FERRAMENTAS CRONE CSD
A utilização de uma nova função objetivo para a otimização se traduz por
certas modificações nos arquivos de base da Toolbox CRONE. As funções
z(O)O 7 (O)
O devem ser calculadas, assim como a energia do erro. O algoritmo de
cálculo da função fmincon foi alterado de “trust-region-reflective” para “interior-
point”, pois este último mostrou-se mais rápido e mais eficaz no cálculo do regulador
otimizado. Essas modificações necessitam da “Optimization Toolbox” versão 4.0 ou
superior, a qual é fornecida com o MATLAB 2008a ou superior.
O estudo foi feito com um sistema de exemplo do Guia do Usuário da
Toolbox CRONE (diagramas de Bode e Nichols na figura 2.2), o qual é definido por
uma planta nominal (equação 2.23) com variações de ganho. O interesse de se
utilizar este exemplo é o fato do mesmo ter sido otimizado (da maneira iterativa
manual representada na figura 2.10) pelos desenvolvedores da Toolbox. Assim
considera-se que este exemplo é próximo do ótimo. Comparando-o com os
resultados obtidos com os novos critérios de otimização pode-se verificar a eficiência
destes.
() = 3,1620,01 q +
2.23
Como o exemplo foi criado a partir de sucessivas modificações nas quais os
limites das funções de sensibilidade eram modificados a cada iteração, as curvas
das restrições do exemplo são tais que a função fmincon encontra a função ótima.
Para encontrar essa mesma função ótima, mas supondo-se que o sistema ainda não
foi otimizado e as restrições ideais não são conhecidas, os limites sobre as funções
T(s), S(s) e GS(s) foram amenizados para a realização dos testes. A função T(s) foi
limitada por uma banda passante mínima menor que a do exemplo e não tem limite
de banda passante máxima; o limite de banda passante da função S(s) foi retirado;
assim como o valor limite da função GS(s) foi colocado bem acima do anterior
(Figura 2.12). O objetivo dessa manobra é fazer com que todo bom resultado
alcançado com os novos critérios de otimização seja ele devido à minimização do
critério, e não devido às restrições das funções de sensibilidade. A função CS(s) não

30
tem seus limites alterados, pois esta função é uma restrição física do sistema, ela
delimita o nível máximo e a rapidez do sinal de comando que o atuador pode aplicar.
Figura 2.12 - Modificação dos limites das funções de sensibilidade para as simulações
O sistema do exemplo otimizado possui um gabarito em alta frequência e um
gabarito de baixa frequência (representação na figura 2.7 e implantação na Toolbox
a partir do botão “Open-loop parameter” representado na figura 2.9). Uma primeira
simulação foi realizada para um regulador sem esses dois gabaritos, com o objetivo
de obter um regulador mais simples otimizado com os novos critérios.
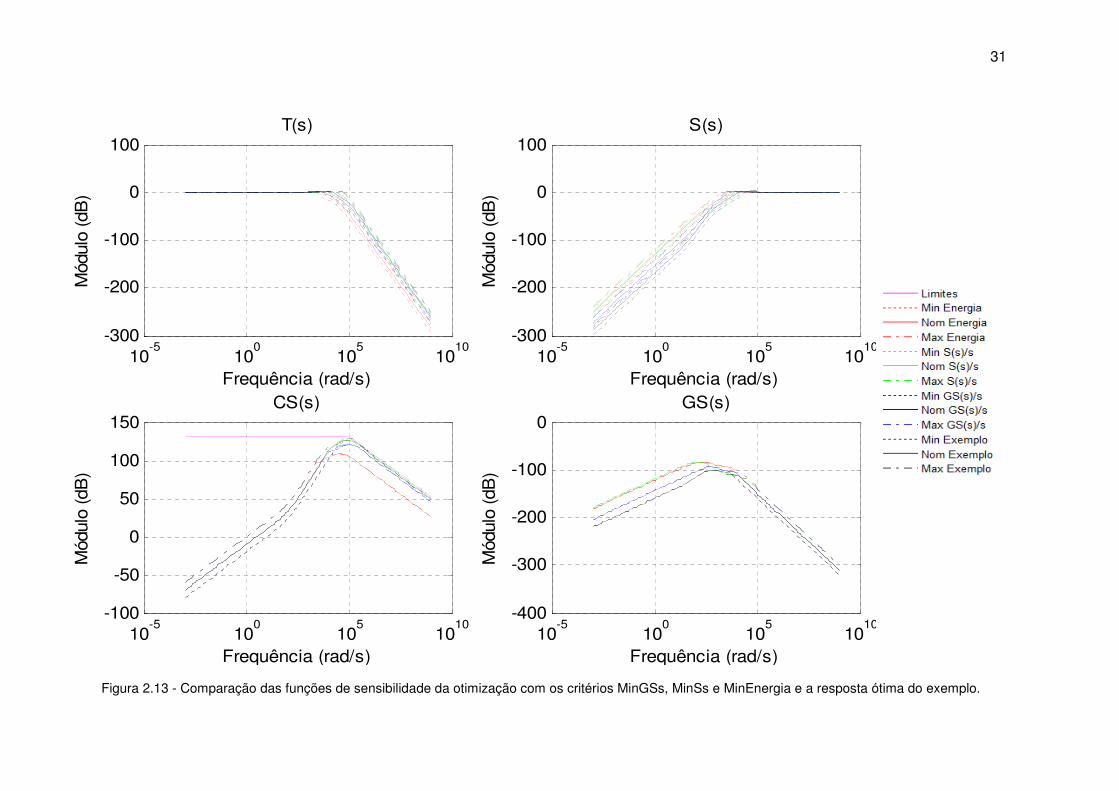
A figura 2.13 mostra a comparação entre as otimizações com os três
critérios e o exemplo ótimo. A otimização com o critério MinSs se mostrou o mais
eficaz pois se aproximou mais do resultado encontrado na simulação do exemplo.
Tanto com relação ao desempenho em monitoramento (capacidade do sinal de
saída seguir o sinal de referência - função T(s)) quanto com relação ao desempenho
em regulação (capacidade de rejeição de perturbações – função S(s)), a otimização
com MinSs resultou num sistema com uma banda passante maior com relação ao
critério MinGSs. Porém, esse último não pode ser desprezado, pois também chegou
a bons resultados.
100
1010
-300
-200
-100
0
T(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-300
-200
-100
0
100S(s)
Frequência (rad/s)M
ódul
o (d
B)
10-5
100
105
1010
40
60
80
100
120
140CS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
100
105
-200
-150
-100
-50
GS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
Limites do exemplo
Novos limites
31
Figura 2.13 - Comparação das funções de sensibilidade da otimização com os critérios MinGSs, MinSs e MinEnergia e a resposta ótima do exemplo.
10-5
100
105
1010
-300
-200
-100
0
100T(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-300
-200
-100
0
100S(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-100
-50
0
50
100
150CS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-400
-300
-200
-100
0GS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
32
O critério MinEnergia se mostrou o menos eficaz, com uma banda passante
inferior àquelas encontradas com os outros critérios. Porém, teoricamente este
critério deveria aumentar a rapidez e o amortecimento do sistema. Após mudanças
nas linhas de código MATLAB responsáveis pelo cálculo da energia total do sistema,
concluiu-se que a função fmincon não resultava num bom regulador quando a
função objetivo tinha uma pequena ordem de grandeza (por exemplo: 10-6). A
solução foi utilizar um valor representativo da energia em escala logarítmica, assim a
nova função objetivo MinEnergia é representada pela equação 2.24.
avw -P = 20. log@ 12u n |k(j,)|qr
Ir s,
2.24
A otimização com esse critério mostrou resultados muito melhores do que
aqueles encontrados com o cálculo da energia em escala linear. Este critério
mostrou-se inclusive melhor que o critério MinGSs. As figuras completas da
comparação da otimização com todos os critérios é mostrada no anexo C, e a figura
2.14 mostra um detalhe nas regiões de interesse dos gráficos.
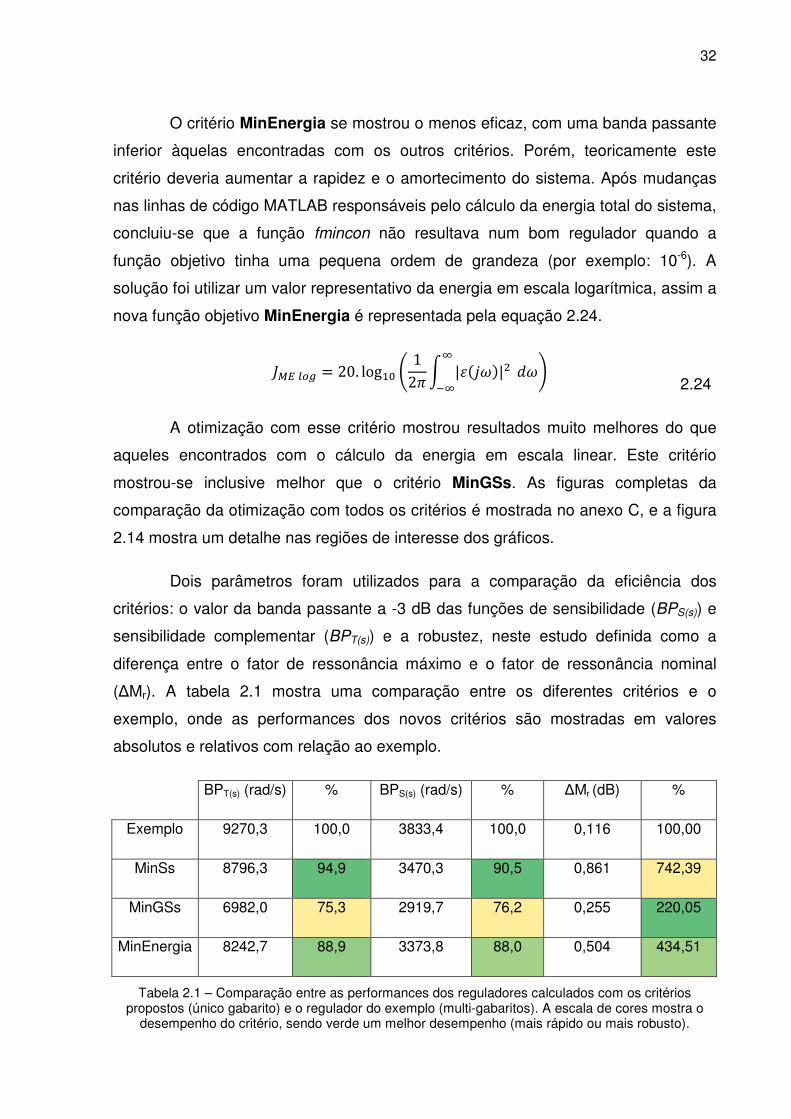
Dois parâmetros foram utilizados para a comparação da eficiência dos
critérios: o valor da banda passante a -3 dB das funções de sensibilidade (BPS(s)) e
sensibilidade complementar (BPT(s)) e a robustez, neste estudo definida como a
diferença entre o fator de ressonância máximo e o fator de ressonância nominal
(∆Mr). A tabela 2.1 mostra uma comparação entre os diferentes critérios e o
exemplo, onde as performances dos novos critérios são mostradas em valores
absolutos e relativos com relação ao exemplo.
BPT(s) (rad/s) % BPS(s) (rad/s) % ∆Mr (dB) %
Exemplo 9270,3 100,0 3833,4 100,0 0,116 100,00
MinSs 8796,3 94,9 3470,3 90,5 0,861 742,39
MinGSs 6982,0 75,3 2919,7 76,2 0,255 220,05
MinEnergia 8242,7 88,9 3373,8 88,0 0,504 434,51
Tabela 2.1 – Comparação entre as performances dos reguladores calculados com os critérios propostos (único gabarito) e o regulador do exemplo (multi-gabaritos). A escala de cores mostra o
desempenho do critério, sendo verde um melhor desempenho (mais rápido ou mais robusto).

33
Figura 2.14 - Comparação das funções de sensibilidade da otimização com os critérios MinGSs, MinSs e MinEnergia (calculado em escala logarítmica) e a resposta ótima do exemplo. Detalhe na região de interesse.
103
104
-10
-5
0
5
T(s)
Frequência (rad/s)
Mód
ulo
(dB
)
104
105
-15
-10
-5
0
5
S(s)
Frequência (rad/s)
Mód
ulo
(dB
)
104
105
106
105
110
115
120
125
130
CS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
102
104
-130
-120
-110
-100
-90
GS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
LimitesMin Exemplo
Nom Exemplo
Max Exemplo
Min Critério S(s)/sNom Critério S(s)/s
Max Critério S(s)/s
Min Critério GS(s)/sNom Critério GS(s)/s
Max Critério GS(s)/s
Min Critério energia
Nom Critério energiaMax Critério energia

34
A otimização com os três critérios resulta num regulador próximo do
exemplo, atingindo assim o objetivo da mudança do critério (obter um bom regulador
sem a necessidade de iterações manuais na Toolbox CRONE). Enquanto o critério
MinSs foi eficaz para produzir sistemas rápidos (grande banda passante), ele ficou
em desvantagem com relação ao critério MinGSs no quesito robustez. O critério
MinEnergia mostrou um equilíbrio entre robustez e banda passante, tendo
performances suficientemente próximas daquelas do exemplo.
Nenhum dos três critérios foi tão robusto quanto o exemplo. Em
contrapartida eles apresentam boas performances considerando-se sua simplicidade
com relação ao exemplo, pois não apresentam os gabaritos N- e N+. Adicionando-se
estes gabaritos em baixa e alta frequência, observa-se uma notável melhora das
características do regulador calculado com os três critérios no quesito robustez.
Entre eles o mais robusto foi o regulador calculado com o critério MinEnergia, o qual
se mostrou mais robusto que o exemplo. Estes resultados estão resumidos na tabela
2.2 e as curvas das funções de sensibilidade encontram-se no anexo C (figuras C.3
e C.4). Pode-se concluir que a utilização de gabaritos em alta e baixa frequência
aumentou a robustez do sistema resultante.
BPT(s) (rad/s) % BPS(s) (rad/s) % ∆Mr (dB) %
Exemplo 9270,3 100,0 3833,4 100,0 0,116 100,000
MinSs 8876,3 95,7 4398,8 114,8 0,113 97,635
MinGSs 6053,3 65,3 2496,4 65,1 0,105 90,453
MinEnergia 8435,9 91,0 4141,0 108,0 0,078 67,143
Tabela 2.2 – Comparação entre as performances dos reguladores calculados com os critérios propostos e com multi-gabaritos e o regulador do exemplo, também multi-gabaritos.
2.5 CONCLUSÃO SOBRE OS CRITÉRIOS DE OTIMIZAÇÃO
Esse estudo mostrou a eficiência dos três critérios estudados, com destaque
para os critérios MinSs e MinEnergia. O método de cálculo do regulador foi

35
facilitado com relação ao critério original da Toolbox, pois em uma primeira
otimização o regulador encontrado foi próximo do ótimo. Porém, cada sistema é
único, assim é possível que a otimização com certo critério seja mais eficiente para
um sistema do que para um outro.
Dados estes resultados, a proposta é a implantação dos três critérios na
caixa de ferramentas CRONE CDS ao lado do critério existente atualmente. Assim o
usuário terá a liberdade de escolher qual critério utilizar na otimização do seu
sistema, dando maior peso ao desempenho desejado: robustez ou rapidez, por
exemplo.
O sistema estudado nesta seção é formado por uma planta simples, utilizada
de forma didática como exemplo no Guia do Usuário da Toolbox CRONE (referência
número [2]). Na busca pela validação dos critérios de otimização, outros sistemas
devem ser estudados para garantir que a modificação na Toolbox otimize o cálculo
para diferentes situações. O próximo capítulo vai se interessar pelo estudo de um
sistema real e mais complexo: um aerogerador.
36
3 MODELO DE UM AEROGERADOR
3.1 INTRODUÇÃO SOBRE A ENERGIA EÓLICA
A utilização de combustíveis fósseis desde aproximadamente a década de
1850 resultou no aumento da concentração de carbono na atmosfera. Uma de suas
consequências é o aumento da temperatura média do planeta, a qual pode
desencadear problemas como o derretimento das geleiras e o aumento do nível dos
mares. Num contexto onde a demanda por energia está aumentando para garantir o
desenvolvimento social e econômico e para melhorar o bem-estar e a saúde dos
seres humanos, as energias renováveis são vistas como soluções alternativas aos
combustíveis fósseis. Segundo o Special Report on Renewable Energy Sources and
Climate Change Mitigation (SRREN) desenvolvido pelo Painel Intergovernamental
de Mudanças Climáticas (IPCC) 77% da energia gerada no mundo pode ser
fornecida por fontes renováveis4 em 2050 [17].
Em 2008 as energias renováveis representavam 13% da produção
energética mundial, sendo 0,2% provenientes da energia eólica. Em 2009 esta fonte
teve um crescimento de 32%, com as mais altas taxas de expansão identificadas na
Europa, América do Norte, China e Índia [17].
A exploração da energia eólica com o objetivo de injeção na rede elétrica
(grande potência) é feita a partir da construção de parques de aerogeradores com
duas ou três pás, sendo estes parques em terra (onshore) ou no mar (offshore). Este
trabalho se interessa por aerogeradores onshore de potências em torno de 2 MW,
de eixo horizontal e compostos de três pás.
4 As fontes levadas em consideração neste estudo são: hidroeletricidade, energia eólica, solar, geotérmica, dos biocombustíveis e dos oceanos.

3.2 AEROGERADOR
A figura 3.1 mostra um exemplo de aerogerador
principais componentes. Ele é composto de três pás conectadas a
conectado ao eixo lento da máquina (
próxima de 16 rotações por minuto
potência nominal. O gerador é conectado ao eixo rá
velocidade de rotação em torno de 100 vezes maior que a velocidade de rota
eixo lento. A conversão entre os dois eixos é
trens de engrenagens.
Figura 3.1 - Exemplo de aerogerador onde as flechas azuis representam o vento. (Fonte: Wikipédia em francês:
O sistema de reg
controle da velocidade de rotação dos eixos e da potência fornecida pela má
nacelle encontra-se no alto d
mostra um exemplo de aerogerador de eixo horizontal
principais componentes. Ele é composto de três pás conectadas a
conectado ao eixo lento da máquina (LS - low shaft). Sua velocidade de rotação é
es por minuto (rpm) quando a máquina funciona na sua
potência nominal. O gerador é conectado ao eixo rápido (HS
o em torno de 100 vezes maior que a velocidade de rota
eixo lento. A conversão entre os dois eixos é feita pelo multiplicador, formado por
erogerador onde as flechas azuis representam o vento. (Fonte: Wikipédia em francês: http://fr.wikipedia.org/wiki/Eolienne)
O sistema de regulação elétrica é geralmente ligado ao gerador fazendo o
da velocidade de rotação dos eixos e da potência fornecida pela má
se no alto do mastro e abriga os elementos da má
37
de eixo horizontal com seus
principais componentes. Ele é composto de três pás conectadas ao rotor, o qual é
). Sua velocidade de rotação é
áquina funciona na sua
HS - high shaft) com
o em torno de 100 vezes maior que a velocidade de rotação do
feita pelo multiplicador, formado por
erogerador onde as flechas azuis representam o vento. (Fonte: Wikipédia
geralmente ligado ao gerador fazendo o
da velocidade de rotação dos eixos e da potência fornecida pela máquina. A
e abriga os elementos da máquina, tais como
38
o rotor, o gerador e os conversores. Ela conta com um sistema de orientação
responsável por posicionar a nacelle na direção do vento, garantindo um melhor
rendimento da transformação da energia do vento em energia cinética de rotação
das pás. As pás contam com um sistema de controle do pitch, o qual é reponsável
por regular a posição angular de cada pá em torno do seu eixo. As fundações fixam
o aerogerador no solo. A conexão à rede elétrica é usualmente centralizada para
todos os aerogeradores de um mesmo parque [18].
3.3 CONTROLE DE UM AEROGERADOR
Diversos são os sistemas de controle de um aerogerador. Eles estão
divididos em dois grupos: controle de segurança e controle de desempenho. O
controle de segurança tem como objetivo garantir o bom funcionamento da máquina,
como por exemplo, os freios aerodinâmicos utilizados para frear a máquina quando
os ventos são muito fortes (superiores a 25 m/s, por exemplo).
O controle de desempenho é aquele que visa assegurar o melhor
rendimento da máquina. A cada 10 minutos a orientação da nacelle é controlada
para que ela permaneça na direção do vento, garantindo assim uma maior
transformação da energia do fluído em energia mecânica nas pás (em seguida
transformada em energia elétrica pelo gerador).
A velocidade de rotação das pás e a potência do gerador são em geral
interligados a partir de dois controles: o controle do pitch e o controle do torque do
gerador. O controle do pitch garante à operação do gerador à potência constante (e
também com velocidade de rotação do eixo lento constante) para ventos de alta
velocidade, geralmente a partir de 11 m/s. Esse controle tem como objetivo denegrir
a capacidade de absorção da energia do vento em alta velocidade, permitindo o
dimensionamento do aerogerador de modo que haja uma boa relação custo-
benefício.
39
Finalmente o controle da velocidade de rotação e da potência para baixas
velocidades de vento, entre 3 m/s e 11 m/s aproximadamente, pode ser feito de
diversas maneiras, como por exemplo através do controle do torque do gerador.
Este trabalho estuda este o controle nesta faixa de velocidades de vento aplicado a
dois modelos os quais serão descritos na seção 3.4.
3.4 MODELOS ESTUDADOS
3.4.1 Aerogerador composto de uma máquina síncrona (Modelo 1)
O primeiro modelo estudado é um aerogerador composto de uma máquina
síncrona conectada diretamente à rede elétrica, o que impõe a velocidade de
rotação do eixo rápido segundo a equação 3.1. Esta relação depende do número de
pólos p da máquina e relaciona a frequência do gerador síncrono (frequência da
rede elétrica f em Hertz) à velocidade de rotação do seu eixo (n em rotações por
minuto - rpm).
= . 120 3.1
A velocidade do rotor é variável, assim um trem de engrenagens epicicloidal
é inserido entre o gerador e a saída do multiplicador o qual é ligado ao rotor (Figura
3.2). Esse trem epicicloidal (Figura 3.3) é controlado por um regulador o que garante
o controle da velocidade de rotação do rotor. A coroa é ligada ao gerador girando
assim com velocidade constante. As engrenagens planetárias são ligadas ao
suporte planetário o qual é conectado ao rotor. O regulador controla a velocidade de
rotação da engrenagem solar à partir de um motor elétrico, controlando assim a
velocidade do rotor [11].

Figura 3.2 -
O modelo desenvolvido no programa Simulink teve sua resposta
frequência identificada permitindo assim o
estudado na seção 3.5.1
simulada tendo como entrada um sinal
de diferentes frequências. Para cada frequência da sen
de fase entre a saída e a entrada do sistema foram medidos. Assim, a partir das
informações de ganho, fase e frequência
criados (figura 3.4).
- Arquitetura do aerogerador do modelo 1 (Fonte:
Figura 3.3 - Trem epicicloidal (Fonte: [11])
O modelo desenvolvido no programa Simulink teve sua resposta
identificada permitindo assim o cálculo de um regulador
3.5.1. A identificação foi feita de forma expertimental: a planta foi
simulada tendo como entrada um sinal multisenos, o qual é equivalente à sen
de diferentes frequências. Para cada frequência da senóide, o ganho
da e a entrada do sistema foram medidos. Assim, a partir das
informações de ganho, fase e frequência, os diagramas de Bode e Nichols foram
40
(Fonte: [11])
O modelo desenvolvido no programa Simulink teve sua resposta em
lculo de um regulador, o qual será
A identificação foi feita de forma expertimental: a planta foi
, o qual é equivalente à senóides
ide, o ganho e a diferença
da e a entrada do sistema foram medidos. Assim, a partir das
os diagramas de Bode e Nichols foram

41
(a)
(b)
Figura 3.4 - Diagramas de Bode (a) e Nichols (b) do modelo do aerogerador (modelo 1).
10-2
10-1
100
101
102
-100
-80
-60
-40
-20Diagrama de Bode da planta
Frequência (rad/s)
Mód
ulo
(dB
)
10-2
10-1
100
101
102
-100
0
100
200
Fas
e (°
)
Frequência (rad/s)
Planta nominal
Incertezas máximas
Incertezas mínimas
-100 0 100 200-100
-80
-60
-40
-20Diagrama de Nichols da planta
Fase (°)
Mód
ulo
(dB
)
Planta nominal
Incertezas
42
3.4.2 Modelo obtido a partir da linearização com o programa FAST de um
aerogerador em torno de 5 pontos de funcionamento (Modelo 2)
O programa FAST do laboratório americano NREL (National Renewable
Energy Laboratory) é destinado ao cálculo dos esforços mecânicos os quais um
aerogerador é submetido para diversas condições atmosféricas ou diante a defeitos
no sistema (cálculo de cargas) [15]. Uma de suas funcionalidades é a possibilidade
de obtenção de um modelo linear do aerogerador em torno de um ponto de
funcionamento. Nesse estudo o ponto de funcionamento é definido para certa
velocidade de rotação do rotor, a qual tem uma correspondência direta à velocidade
do vento.
Como o objetivo do estudo é o controle em baixa velocidade de vento, os
pontos de funcionamento escolhidos são para ventos de 4 m/s, 6 m/s, 7 m/s, 8 m/s e
10 m/s (vento medido na direção da nacelle). Para cada um desses pontos um
arquivo de perfil de vento turbulento em torno da velocidade média foi criado com o
programa TurbSim, também desenvolvido pelo laboratório NREL [16]. Para cada
perfil de vento uma simulação temporal no programa FAST foi feita objetivando-se
encontrar o valor da velocidade de rotação referente a cada velocidade do vento. Em
seguida a linearização pôde ser feita em torno de cada um dos pontos de
funcionamento.
O aerogerador utilizado nas simulações é um modelo proveniente do projeto
WindPact do laboratório NREL, o qual está incluído no programa FAST na forma de
um exemplo. Ele tem uma potência de 1,5 MW, com um diâmetro de rotor igual a 70
m e uma altura do mastro igual a 84 m.
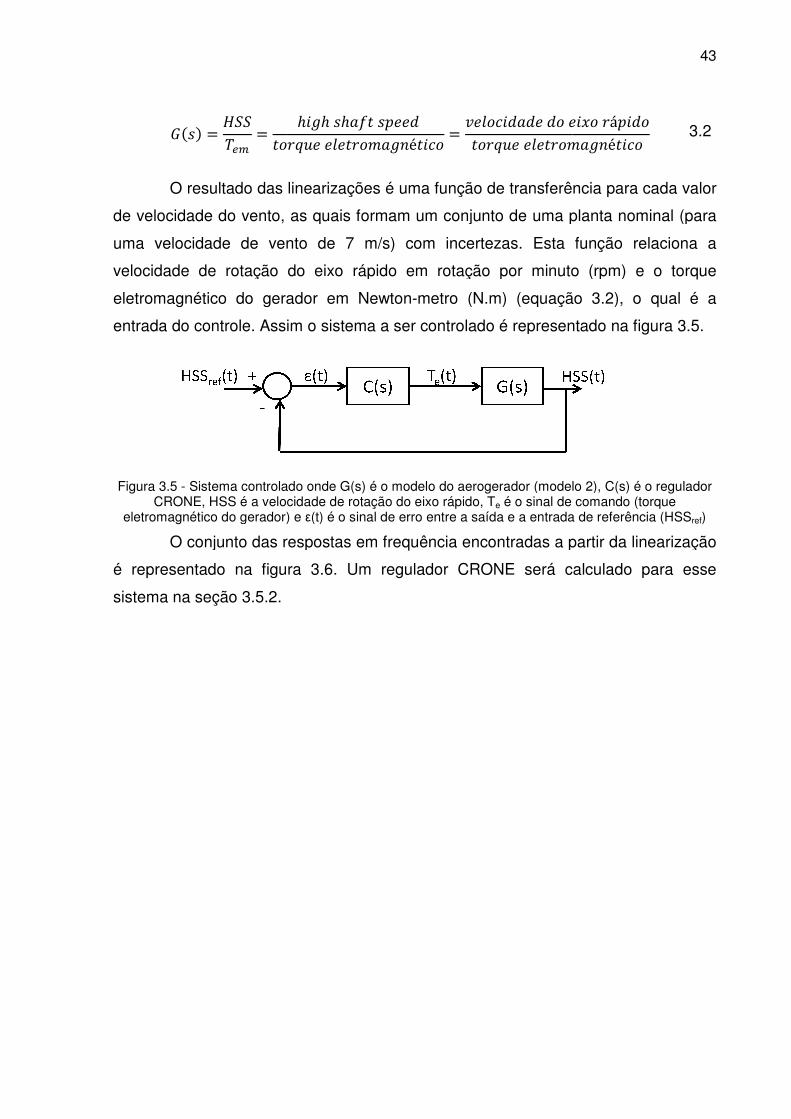
() = xG = l37O resultado das linearizações é uma funçã
de velocidade do vento, as quais formam um conjunto de uma planta nominal (para
uma velocidade de vento de 7 m/s) com incertezas. Esta função relaciona a
velocidade de rotação do eixo rápido
eletromagnético do gerador
entrada do controle. Assim o sistema a ser controlado é representado na
Figura 3.5 - Sistema controladoCRONE, HSS é a velocidade de rotação do eixo rápido, T
eletromagnético do gerador) e
O conjunto das respostas
é representado na figura
sistema na seção 3.5.2.
Z Sl 77sl37 77l34SélZ23
732ZsSs7 s3 7Zp3
l37 77l34S
O resultado das linearizações é uma função de transferência para cada valor
de velocidade do vento, as quais formam um conjunto de uma planta nominal (para
uma velocidade de vento de 7 m/s) com incertezas. Esta função relaciona a
velocidade de rotação do eixo rápido em rotação por minuto (rpm)
eletromagnético do gerador em Newton-metro (N.m) (equação
entrada do controle. Assim o sistema a ser controlado é representado na
Sistema controlado onde G(s) é o modelo do aerogerador (modelo 2)a velocidade de rotação do eixo rápido, Te é o sinal de comando (torque
do gerador) e ε(t) é o sinal de erro entre a saída e a entrada de referência (HSS
O conjunto das respostas em frequência encontradas a partir da linearização
figura 3.6. Um regulador CRONE será calculado para esse
43
7Zp3 áZs377l34SélZ23
3.2
o de transferência para cada valor
de velocidade do vento, as quais formam um conjunto de uma planta nominal (para
uma velocidade de vento de 7 m/s) com incertezas. Esta função relaciona a
em rotação por minuto (rpm) e o torque
(equação 3.2), o qual é a
entrada do controle. Assim o sistema a ser controlado é representado na figura 3.5.
(modelo 2), C(s) é o regulador o sinal de comando (torque
o sinal de erro entre a saída e a entrada de referência (HSSref)
partir da linearização
CRONE será calculado para esse

44
Figura 3.6 - Diagrama de Bode do modelo obtido com o programa FAST. O modelo foi deduzido a partir de linearizações em torno de pontos de funcionamento os quais correspondem a velocidades
de vento iguais a 4m/s, 6m/s, 7m/s, 8m/s e 10m/s.
3.5 SÍNTESE DAS LEIS DE COMANDO
3.5.1 Controle do aerogerador composto de uma máquina síncrona (modelo 1)
As especificações do sistema em malha fechada para o cálculo do regulador
são [11]: limite de overshoot em 20%, tempo de resposta de rejeição de
perturbações menor que um segundo, o que define a banda passante da função de
sensibilidade maior que 3 rad/s. A máxima variação da entrada é definida em 100%
10-2
10-1
100
101
102
-80
-60
-40
-20
0
Frequência
Mód
ulo
(dB
)Diagrama de bode do conjunto de modelos linearizados
10-2
10-1
100
101
102
80
100
120
140
160
180
Frequência (rad/s)
Fas
e(°)
Vento à 4 m/sVento à 6 m/sVento à 7 m/sVento à 8 m/sVento à 10 m/s
45
e na frequência 0,0106 rad/s o ruído de medida deve ser inferior a 3%, assim a
função de sensibilidade CS(s) é limitada em 49dB.
Quatro simulações foram feitas para tal sistema, porém dadas as incertezas
da planta, os resultados encontrados são também muito incertos. Assim, um resumo
destes resultados é mostrado neste parágrafo, enquanto as figuras encontram-se no
anexo C (figura C.5). Os cálculos feitos com os critérios MinEnergia e MinGSs são
ligeiramente mais rápidos, mas as diferenças entre as otimizações são tão pequenas
que podem ser negligenciadas. Observando-se o diagrama de Nichols do sistema
(figura 3.4 b) observa-se que a curva das incertezas apresenta regiões mínimas
(incertezas próximas das curvas nominais). Estas regiões não representam
necessariamente um mínimo das incertezas do sistema, podendo ser uma
consequência da maneira como a identificação foi feita. Durante a otimização, a
função fmincon vê esses mínimos locais como parâmetros os quais podem garantir
alta robustez devido às pequenas variações na região. Assim para os diferentes
critérios a função fmincon resulta num mesmo regulador. A solução para o problema
seria a identificação a partir de outro método o qual poderia evitar o surgimento
dessas regiões. Como a identificação não entra nos objetivos deste trabalho, um
novo modelo de aerogerador será estudado na seção seguinte permitindo assim a
validação dos critérios de otimização.
3.5.2 Controle do aerogerador linearizado a partir de FAST (modelo 2)
As especificações para esse sistema são as seguintes: O overshoot máximo
para a planta nominal deve ser de 15% e para as plantas incertas de 25%. A
variação máxima do sinal de entrada entre um instante e o seguinte foi definida
como 5 rpm, pois para velocidades de vento entre 4 m/s e 10 m/s, a velocidade de
rotação do gerador varia entre 530 rpm e 1300 rpm aproximadamente. O valor
máximo do comando foi definido igual a 10000 N.m, pois nas simulações temporais
o valor do torque eletromagnético é próximo de 8400 N.m. Os valores máximos do
ruído de medida e do ruído no sinal de controle foram definidos de forma a serem
respectivamente 0,1% e 1% do valor máximo do comando. A margem de módulo foi
46
definida igual a 0,5 para garantir a estabilidade limitando assim o valor máximo da
função de sensibilidade em 6 dB, garantindo a rejeição de perturbações.
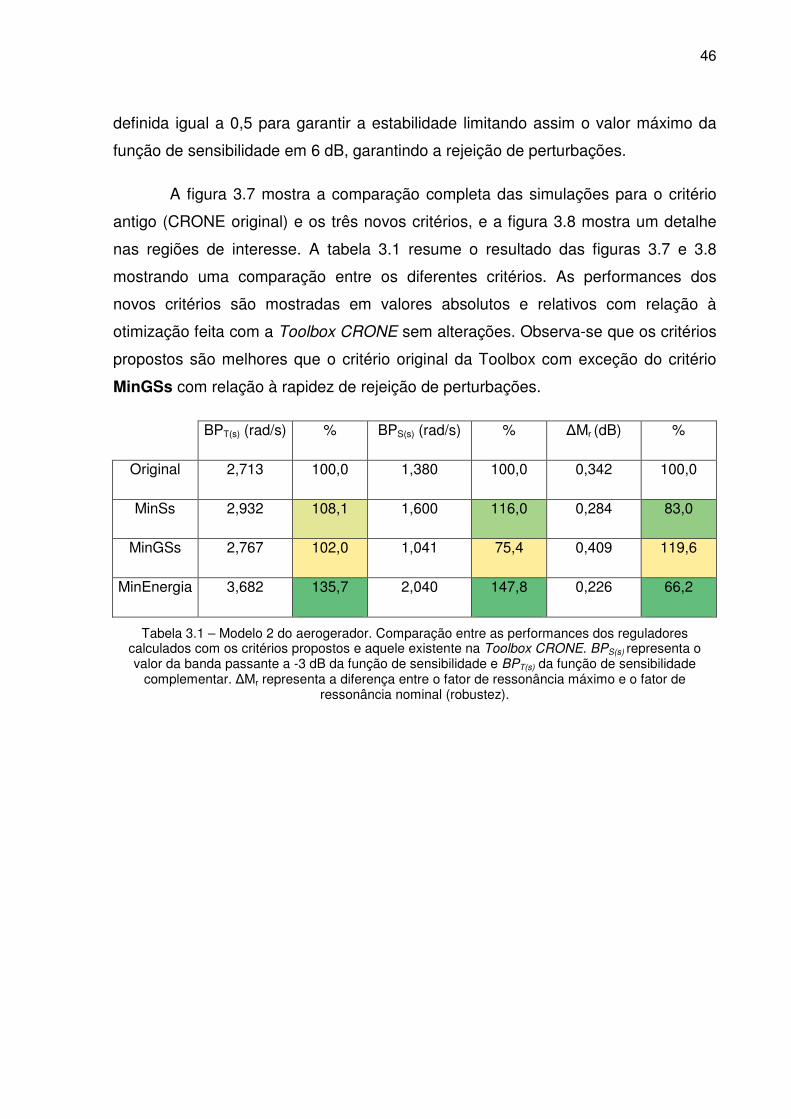
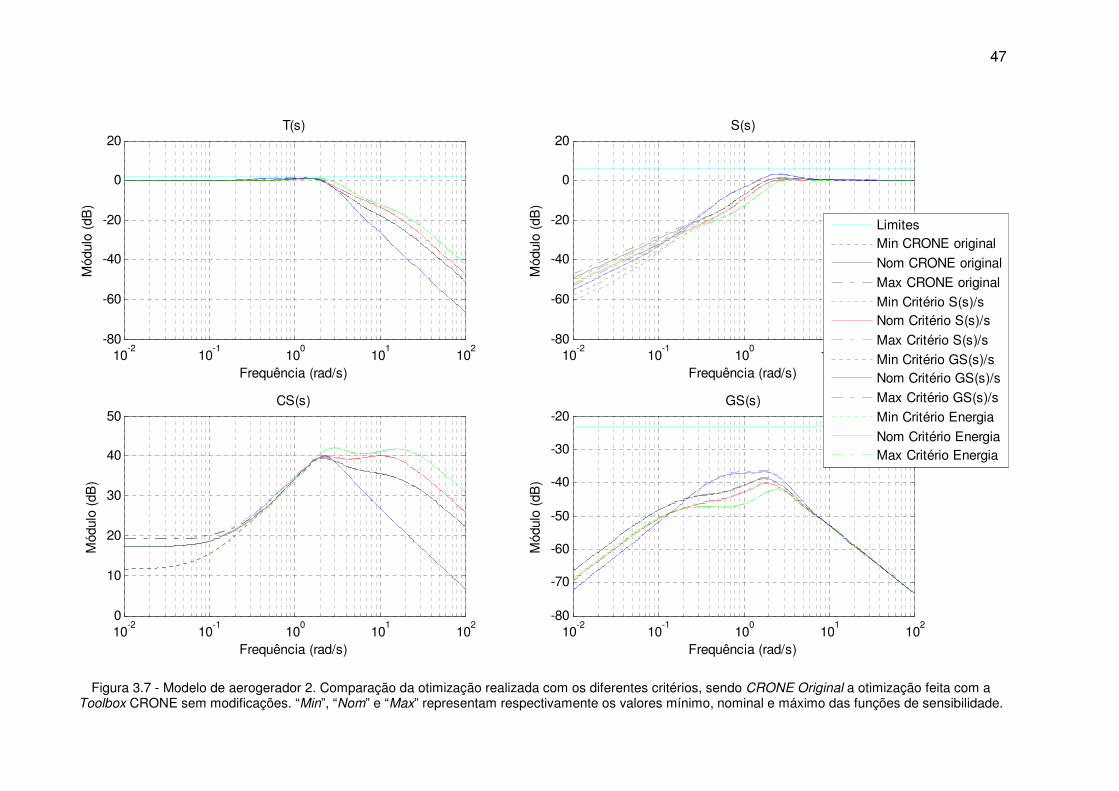
A figura 3.7 mostra a comparação completa das simulações para o critério
antigo (CRONE original) e os três novos critérios, e a figura 3.8 mostra um detalhe
nas regiões de interesse. A tabela 3.1 resume o resultado das figuras 3.7 e 3.8
mostrando uma comparação entre os diferentes critérios. As performances dos
novos critérios são mostradas em valores absolutos e relativos com relação à
otimização feita com a Toolbox CRONE sem alterações. Observa-se que os critérios
propostos são melhores que o critério original da Toolbox com exceção do critério
MinGSs com relação à rapidez de rejeição de perturbações.
BPT(s) (rad/s) % BPS(s) (rad/s) % ∆Mr (dB) %
Original 2,713 100,0 1,380 100,0 0,342 100,0
MinSs 2,932 108,1 1,600 116,0 0,284 83,0
MinGSs 2,767 102,0 1,041 75,4 0,409 119,6
MinEnergia 3,682 135,7 2,040 147,8 0,226 66,2
Tabela 3.1 – Modelo 2 do aerogerador. Comparação entre as performances dos reguladores calculados com os critérios propostos e aquele existente na Toolbox CRONE. BPS(s) representa o valor da banda passante a -3 dB da função de sensibilidade e BPT(s) da função de sensibilidade
complementar. ∆Mr representa a diferença entre o fator de ressonância máximo e o fator de ressonância nominal (robustez).
47
Figura 3.7 - Modelo de aerogerador 2. Comparação da otimização realizada com os diferentes critérios, sendo CRONE Original a otimização feita com a Toolbox CRONE sem modificações. “Min”, “Nom” e “Max” representam respectivamente os valores mínimo, nominal e máximo das funções de sensibilidade.
10-2
10-1
100
101
102
-80
-60
-40
-20
0
20T(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-2
10-1
100
101
102
-80
-60
-40
-20
0
20S(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-2
10-1
100
101
102
0
10
20
30
40
50CS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-2
10-1
100
101
102
-80
-70
-60
-50
-40
-30
-20GS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
LimitesMin CRONE original
Nom CRONE original
Max CRONE original
Min Critério S(s)/sNom Critério S(s)/s
Max Critério S(s)/s
Min Critério GS(s)/sNom Critério GS(s)/s
Max Critério GS(s)/s
Min Critério Energia
Nom Critério EnergiaMax Critério Energia
48
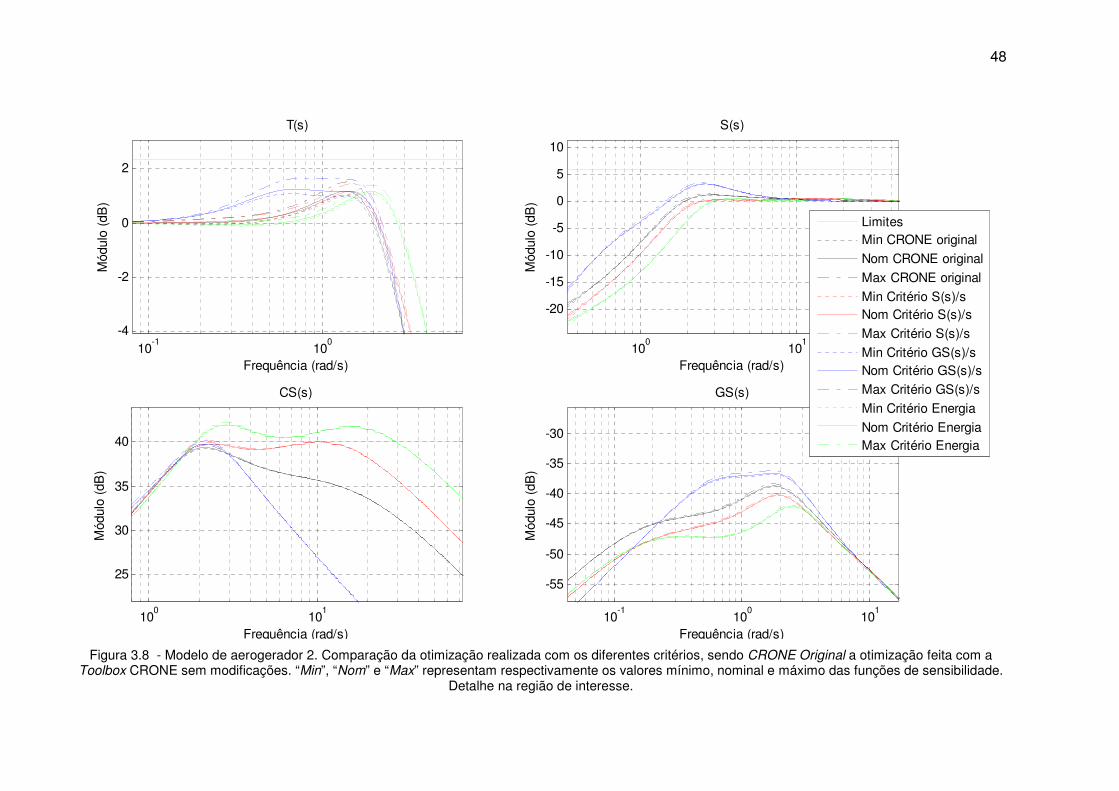
Figura 3.8 - Modelo de aerogerador 2. Comparação da otimização realizada com os diferentes critérios, sendo CRONE Original a otimização feita com a Toolbox CRONE sem modificações. “Min”, “Nom” e “Max” representam respectivamente os valores mínimo, nominal e máximo das funções de sensibilidade.
Detalhe na região de interesse.
10-1
100
-4
-2
0
2
T(s)
Frequência (rad/s)
Mód
ulo
(dB
)
100
101
-20
-15
-10
-5
0
5
10
S(s)
Frequência (rad/s)
Mód
ulo
(dB
)
100
101
25
30
35
40
CS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-1
100
101
-55
-50
-45
-40
-35
-30
GS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
LimitesMin CRONE original
Nom CRONE original
Max CRONE original
Min Critério S(s)/sNom Critério S(s)/s
Max Critério S(s)/s
Min Critério GS(s)/sNom Critério GS(s)/s
Max Critério GS(s)/s
Min Critério Energia
Nom Critério EnergiaMax Critério Energia
49
O critério MinEnergia foi o de melhor performance, seguido de MinSs. O
sinal de comando do regulador calculado com MinEnergia passa do limite imposto
em 2dB, valor suficientemente pequeno podendo ser negligenciado. Dado estes
resultados pode-se concluir que os critérios propostos atingiram seus objetivos. Para
verificar as performances temporais do sistema controlado, o capítulo 4 mostrará os
testes de validação dos reguladores calculados.
3.6 CONCLUSÃO SOBRE OS CRITÉRIOS DE OTIMIZAÇÃO APLICADOS A
MODELOS DE AEROGERADOR
Enquanto o capítulo 2 mostrou a eficiência dos critérios de otimização
propostos em uma planta simples, o capítulo 3 mostrou o desempenho dos mesmos
para uma planta mais complexa e a qual representa um sistema real. Novamente a
alta eficiência dos critérios MinSs e MinEnergia, propostos neste trabalho foram
comprovados.

50
4 ESTUDO DO REGULADOR COM O PROGRAMA FAST
4.1 INTRODUÇÃO
O capítulo 3 mostrou a utilização dos critérios de otimização propostos neste
trabalho para o cálculo de reguladores CRONE fracionários e suas performances
com relação ao critério original da Toolbox CRONE CSD. Porém um regulador
fracionário não pode ser implantado na prática, sendo necessário o cálculo de um
regulador racional.
Este capítulo tem como objetivo calcular um regulador racional o qual poderá
ser testado com o programa de simulação do comportamento de um aerogerador
FAST. Estes testes temporais ilustram as relações estudadas no decorrer da análise
dos critérios: a relação entre rapidez e banda passante da função de sensibilidade
complementar; e a relação entre o amortecimento e o fator de ressonância.
Além disso, o cálculo de um regulador permite o estudo da sua influência
nos casos extremos de cargas as quais o aerogerador é submetido durante a sua
aplicação. Este estudo não é o objetivo deste trabalho, sendo proposto como uma
perspectiva de continuidade do mesmo. Finalmente a aplicação do regulador leva a
outra perspectiva de estudo: a criação do comando do aerogerador sem a
necessidade de medida do vento.
Os reguladores racionais foram criados com o auxílio da Toolbox CRONE,
resultando nos três reguladores descritos pelas equações 4.1, 4.2 e 4.3 sendo
CSs(s), CGSs(s) e CEnergia(s) os reguladores calculados com os critérios MinSs,
MinGSs e MinEnergia respectivamente.
O() = −2030,3 ( + 3,8)( + 3,787)( + 0,149) ( + 13,23) ( + 11,5) ( + 0,97) 4.1

51
zO() = −220,5 ( + 0,19)( + 0,049)( + 0,014)(q + 1.05 + 0.38) ( + 1,89) ( + 1,16) ( + 0,18)( + 0.047)( + 0.015) 4.2
w0xcP=() = −3727,2 ( + 5,57)( + 4,85)( + 0,319)( + 0,17) ( + 18,24) ( + 18,18) ( + 0,78)( + 0,75) 4.3
O programa FAST simula o comportamento do aerogerador tendo como
entrada todos os parâmetros do mesmo (massa e inércia das pás, da torre, da
nacelle, do rotor, forma das pás, etc) além de parâmetros aerodinâmicos como a
densidade do ar, o perfil de vento entre outros. O vento é considerado uma
perturbação para o sistema (perturbação de saída dy(t) na figura 2.3). Uma
perturbação de entrada da planta du(t) pode ser representada por um defeito
mecânico nos atuadores, estudo o qual não será realizado neste trabalho. O ruído
de medida dm(t) também será desconsiderado.
Figura 4.1 - Esquema Simulink de testes do sistema em malha fechada.
O sistema de base para os testes é aquele mostrado na figura 4.1. O bloco
criação de referência pode ser observado na figura 4.2 e será detalhado na seção
4.2. O bloco do regulador pode ser observado na figura 4.3. Ele é formado pelo
regulador CRONE, o qual é um modelo Simulink criado diretamente na Toolbox
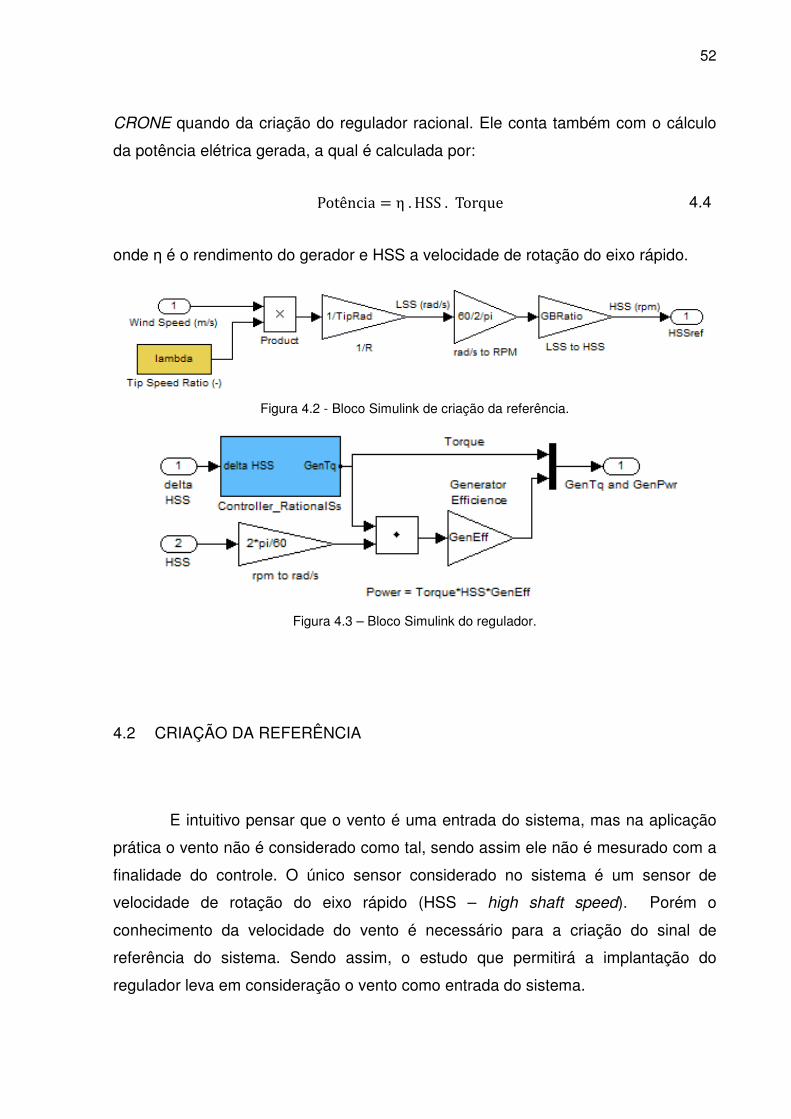
52
CRONE quando da criação do regulador racional. Ele conta também com o cálculo
da potência elétrica gerada, a qual é calculada por:
Potência = η . HSS . Torque 4.4
onde η é o rendimento do gerador e HSS a velocidade de rotação do eixo rápido.
Figura 4.2 - Bloco Simulink de criação da referência.
Figura 4.3 – Bloco Simulink do regulador.
4.2 CRIAÇÃO DA REFERÊNCIA
E intuitivo pensar que o vento é uma entrada do sistema, mas na aplicação
prática o vento não é considerado como tal, sendo assim ele não é mesurado com a
finalidade do controle. O único sensor considerado no sistema é um sensor de
velocidade de rotação do eixo rápido (HSS – high shaft speed). Porém o
conhecimento da velocidade do vento é necessário para a criação do sinal de
referência do sistema. Sendo assim, o estudo que permitirá a implantação do
regulador leva em consideração o vento como entrada do sistema.

53
As pás possuem uma característica da capacidade de absorção da energia
contida no vento em função da velocidade de rotação das pás, da velocidade do
vento e do ângulo de pitch. O ângulo de pitch é nulo para as velocidades de vento
de interesse, então se pode definir a característica da pá através da curva Cp(λ),
onde a chamada tip speed ratio (λ) é definida por:
λ = Ω. § 4.5
Sendo V a velocidade do vento em m/s, Ω a velocidade de rotação do rotor
em rad/s e R o valor do raio de rotação das pás em m (distância entre a ponta da pá
e o eixo de rotação). O objetivo do controle é manter a velocidade de rotação do eixo
lento de forma que λ seja constante e garanta o valor máximo de Cp. O valor
calculado5 de λ para a pá estudada é igual a 6,26.
4.3 ANÁLISE DA RESPOSTA AO DEGRAU
Para a verificação das performances do sistema três características serão
observadas na resposta a um degrau do sinal de referência: o overshoot; o qual
deve ser o mesmo para todos os pontos de funcionamento garantindo a robustez do
sistema; o erro estático, o qual deve ser nulo; e a rapidez, ou seja, o tempo de
resposta do sistema. Para observar estas características uma entrada da forma de
degraus em torno dos pontos de funcionamento foi criada, com valores de
velocidade de vento entre 4 e 11 m/s (Figura 4.4). A saída correspondente à
velocidade de rotação do eixo rápido está representada na figura 4.5 para os três
reguladores.
5 Estudo feito por Bastien Gaillardon da sociedade VALEOL com o programa AeroDyn de NREL.

54
Figura 4.4 – Perfil de vento utilizado para o teste do regulador.
Figura 4.5 – Velocidade de rotação do eixo rápido – sinal de referência e respostas dos sistemas
contendo os reguladores calculados com os diferentes critérios.
O erro estático é nulo para todos os casos. Para analisar a rapidez, a figura
4.6 mostra um detalhe do comportamento da velocidade de rotação do eixo rápido
para o primeiro degrau de entrada (vento de 4 m/s a 5 m/s). Como previsto a partir
das curvas das funções de sensibilidade (Figura 3.7) e da tabela de comparação
entre os critérios (Tabela 3.1), o regulador calculado com o critério MinEnergia teve
as melhores performances em rapidez.
0 100 200 300 400 500 600 700 8004
6
8
10
12
Tempo (s)
Vel
ocid
ade
(m/s
)
Velocidade do vento
0 50 100 150 200500
1000
1500
2000
Tempo (s)
Vel
ocid
ade
(rpm
)
Velocidade de rotação do eixo rápido (rpm)
ReferênciaCritério MinSsCritério MinGSsCritério MinEnergia
Detalhe figura 4.6

55
Figura 4.6 – Velocidade de rotação do eixo rápido. Detalhe na resposta para o degrau de vento de 4 a 5 m/s.
Os valores de overshoot para cada degrau da entrada (variação da
velocidade do vento) são mostrados na tabela 4.1. Os valores médios de
amortecimento são 20,98%, 34,67% e 19,01% para os critérios MinSs, MinGSs e
MinEnergia respectivamente. O regulador proveniente de MinEnergia é assim o mais
amortecido. Com relação à robustez, as variações entre o valor máximo e mínimo do
overshoot são 2,62 %, 3,46 % e 2,37 % para os critérios MinSs, MinGSs e
MinEnergia respectivamente. Sendo estas variações pequenas, pode-se considerar
que os três reguladores são robustos.
Critério Degrau de
4 a 5 m/s
Degrau de
5 a 6 m/s
Degrau de
6 a 7 m/s
Degrau de
7 a 8 m/s
Degrau de
8 a 9 m/s
Degrau de
9 a 10 m/s
Degrau de
10 a 11 m/s
MinSs 19,59 % 20,22 % 20,62 % 21,02 % 21,42 % 21,81 % 22,21 %
MinGSs 32,93 % 33,55 % 34,11 % 34,68 % 35,25 % 35,81 % 36,39 %
MinEnergia 17,71 % 18,36 % 18,71 % 19,05 % 19,40 % 19,74 % 20,08 %
Tabela 4.1 – Comparação dos valores de overshoot da resposta ao degrau para os diferentes reguladores (calculados a partir dos critérios MinSs, MinGSs e MinEnergia).
O sinal de saída do regulador é o torque eletromagnético do gerador. Porém,
este não é o comando diretamente aplicado ao gerador. Sabe-se que o gerador é
uma máquina de indução de rotor bobinado com anéis coletores6, porém a forma de
controle e o tipo específico da máquina não são conhecidos. Sendo assim, o gasto
6 Fonte: relatório do projeto WindPACT: WindPACT Turbine Rotor Design Study: June 2000 – June 2002 (Revised). (2006). Disponível em http://www.nrel.gov/wind/windpact.html.
24 26 28 30 32 34 36 38 40 42600
650
700
750
800
Tempo (s)
Vel
ocid
ade
(rpm
)
Velocidade de rotação do eixo rápido (rpm)
ReferênciaCritério MinSsCritério MinGSsCritério MinEnergia

56
energético do sinal de comando não pode ser calculado. Supondo-se que este
gerador é uma máquina assíncrona de dupla alimentação, o controle pode ser feito a
partir da tensão de alimentação do rotor, com o estator conectado à rede. Esta
tensão influenciará no fluxo rotativo da máquina, influenciando assim no seu torque
eletromagnético.
Um exemplo deste tipo de controle é mostrado na figura 4.7. O controle de
nível 1 é responsavel por transformar o sinal de referência em sinal aplicado pelos
atuadores. São eles: um motor, responsável por girar a pá e assim controlar o
ângulo de pitch; e os conversores do gerador (CG) e da rede (CR), responsáveis por
controlar a tensão de alimentação do rotor da máquina assíncrona de dupla
alimentação (MADA). O controle de nível 2 é criado para gerar a referência do
sistema, seja ela a referência do ângulo de pitch ou a referência de torque
eletromagnético do gerador. Neste trabalho somente o controle da velocidade de
rotação da MADA foi considerado, sendo o controle de pitch ignorado pois ele é feito
para altas velocidades de vento.
Figura 4.7 – Aerogerador de velocidade variável e regulação de pitch. (Fonte: [21])

57
A figura 4.8 mostra o torque eletromagnético e a potência do gerador, sendo
a potência calculada a partir da equação 4.4.
(a) (b)
Figura 4.8 – Torque eletromagnético (a) e potência (b) do sistema para o degrau de velocidade de vento de 4 a 5 m/s. Comparação entre os reguladores calculados com os três critérios.
4.4 CONCLUSÃO
Num caso real um degrau de referência não deve ser aplicado, pois os
sistemas eletro-mecânicos não suportam tais variações, ou suportando podem
acabar por reduzir o tempo de vida da máquina. Os sinais de referência são sempre
filtrados, sendo que os próprios sistemas mecânicos e elétricos podem fazer esta
filtragem. Observa-se que entre os três critérios o mais positivo com relação à
quantidade de energia produzida é o sistema calculado com o critério MinEnergia,
seguido de MinSs. Apesar das diferenças serem pequenas, deve-se ressaltar que os
três sistemas calculados são sistemas CRONE. Assim, para que as comparações de
desempenho sejam válidas elas devem ser feitas com outros reguladores já
existentes. Sendo estas performances não divulgadas pelos construtores de
aerogeradores, tal comparação não pôde ser feita neste trabalho.
O estudo do aerogerador teve seu interesse na ilustração da aplicação das
leis de comando. Ele termina com diversas perspectivas de estudos os quais levarão
a uma melhor compreensão do funcionamento do sistema. Os testes tendo como
25 26 27 28 29 30 31
-15
-10
-5
0
5
Torque eletromagnético
Tempo (s)
Tor
que
elet
rom
agné
tico
(kN
.m)
Critério MinSsCritério MinGSsCritério MinEnergia
26 28 30 32
-800
-600
-400
-200
0
200
Potência
Tempo (s)P
otên
cia
(kW
)
Critério MinSs - Et = 24.8861 Wh
Critério MinGSs - Et = 24.8806 Wh
Critério MinEnergia - Et = 24.8872 Wh

58
entrada degraus de velocidade de vento comprovaram a eficiência dos critérios
estudados na primeira parte deste trabalho.
4.5 TRABALHOS FUTUROS
As perspectivas na sequência deste trabalho são:
Cálculo de um filtro do sinal de referência, o qual levará em consideração as
limitações eletro-mecânicas da máquina;
Estudo do sistema de controle a partir da modelagem do gerador e dos
conversores de potência, permitindo assim o cálculo do consumo de potência do
sistema de controle;
Estudo das perturbações, como por exemplo uma rajada de vento ou um defeito
mecânico no sistema;
Criação de um sistema de definição do sinal de referência baseado nas medidas
de velocidade de rotação dos eixos e torque do gerador (considerando que o
vento não é medido com a finalidade de geração do sinal de referência);
Estudo da eficiência do regulador em situações extremas de carga;
Estudo da influência do regulador no tempo de vida dos componentes
mecânicos da máquina.

59
5 CONCLUSÃO
A Toolbox CRONE de terceira geração demanda certas vezes tempo e
conhecimentos avançados da teoria de controle e da teoria CRONE para garantir um
regulador de grande desempenho. Este trabalho teve como objetivo automatizar a
otimização dos parâmetros do regulador, exigindo menos esforços para o alcance de
um regulador com boas performances.
Para isto, três critérios de otimização foram propostos, sendo eles os
critérios MinSs, MinGSs e MinEnergia. Num primeiro momento uma planta teórica foi
estudada, na qual MinSs se sobressaltou como um bom critério de otimização,
seguido do critério MinEnergia. Um segundo estudo visou uma planta mais realista:
um aerogerador. Novamente os critérios MinEnergia e MinSs mostraram bons
resultados, sendo que neste caso MinEnergia teve um melhor desempenho que
MinSs. Sendo assim, a inserção dos critérios na Toolbox CRONE leva a um
aumento do seu desempenho. Dada a variação das performances dos critérios
aplicados às diferentes plantas, este trabalho vê como perspectiva a inserção dos
novos critérios na caixa de ferramentas CRONE CSD de terceira geração ao lado do
critério já existente. Assim o usuário terá a opção de escolher o critério mais
adequado de acordo com as especificações do sistema.
A simulação do regulador com o auxílio do programa FAST de simulação de
aerogeradores possibilitou uma aplicação real do sistema estudado. As
performances temporais foram condizentes com aquelas verificadas no estudo de
frequência. O estudo do regulador abriu caminhos para outros trabalhos, como o
estudo da forma de implantação do controle, incluindo a definição dos filtros do sinal
de referência, além da criação deste sinal baseado somente na velocidade de
rotação do eixo rápido. Em seguida testes poderão ser realizados para: a análise
das capacidades de rejeição de perturbações; a verificação das performances do
regulador em face de situações extremas de carga; e sua influência na degradação
das partes mecânicas, influenciando no tempo de vida do aerogerador.

60
A caixa de ferramentas CRONE foi melhorada e um regulador para um caso
real foi calculado, ilustrando uma aplicação e verificando o desempenho dos novos
critérios de otimização. Assim, este trabalho teve um balanço positivo, pois atingiu
seus objetivos e abriu caminhos para futuros estudos. Finalmente, ele pôde trazer
para a comunidade científica da UFPR um método de cálculo de reguladores
disponível em uma caixa de ferramentas gratuita que até então é utilizado
principalmente no laboratório IMS em Bordeaux na França.

61
REFERÊNCIAS
[1] Lanusse P., Melchior P., Dancla F., Cois O. (2001), Toolbox CRONE: une boîte
à outils Matlab pour les systèmes fractionnaires, Laboratoire d'Automatique
et de Productique (LAP) - UMR CNRS, Equipe CRONE - Université Bordeaux 1
– ENSEIRB.
[2] Grupo de pesquisa CRONE. CRONE Control Design Module - User's Guide.
Versão 4.0. 2010. URL: http://cronetoolbox.ims-bordeaux.fr
[3] Prof. Alexandre Trofino. Controle Robusto. Florianópolis, Agosto de 2000.
Disponivel em http://www.das.ufsc.br/~trofino/disciplinas/das-6600/apostila-
robusto.pdf; acessado em 15/03/2011.
[4] Oustaloup, A.; Mathieu, B. La commande CRONE du scalaire au
multivariable. 2.ed. Paris: Editora Hermes , 1999.
[5] Ogata, K. Engenharia de Controle Moderno. Editora Prentice/Hall do Brasil
Ltda. Rio de Janeiro – RJ.
[6] Astrom, K.J. Model uncertainty and robust control design. Cosy Workshop –
ESF Course, Valencia, Espanha, 1999.
[7] Oustaloup, A. Systèmes asservis linéaires d’ordre fractionnaire. Paris:
Editora Masson, 1983.
[8] Gude, J.J.; Kahoraho, E. Simple tuning rules for fractional PI controllers.
Emerging Technologies & Factory Automation, 2009. ETFA 2009. IEEE
Conference on 22-25 Sept. 2009.
[9] Kristiansson, B.; Lennartson, B. Robust and optimal tuning of PI and PID
controllers. 2002. IEE Proc., Part D, Vol. 149 (1), pp. 17-25.
[10] Miranda, M. N. Algoritmos Genéticos: Fundamentos e Aplicações. GTA,
UFRJ. Disponível em http://www.gta.ufrj.br/~marcio/genetic.html, acessado em
15/03/2011.
62
[11] Feytout, B; Lanusse, P.; Sabatier, J.; Gracia, S. Robust CRONE design for a
variable-ratio planetary gearing in a variable speed wind turbine. Université
de Bordeaux, IMS UMR5218 CNRS Talence, France. Valeol, Bègles, France.
Submetido para Proceedings of the 7th ASME/IEEE International Conference on
Mechatronic & Embedded Systems & Applications MESA11 August 29-31, 2011,
Washington, DC, USA
[12] I.M. Horowitz, Quantitative feedback design theory – QFT. QFT Publications,
Boulder, Colorado, 1993.
[13] Poitiers, F. (2003), Etude et commande de génératrices asynchrones pour
l’utilisation de l’énergie éolienne. PhDThesis, Universidade de Nantes,
França.
[14] Lanusse, P. (1994), De la commande CRONE de première génération à la
commande CRONE de troisième génération. PhDThesis, Universidade de
Bordeaux I, França.
[15] NWTC Design Codes (FAST by Jason Jonkman,
Ph.D.). http://wind.nrel.gov/designcodes/simulators/fast/. Última modificação
feita em 05/11/2010; acessado em 02/03/2011.
[16] NWTC Design Codes (TurbSim by Neil Kelley, Bonnie Jonkman.
http://wind.nrel.gov/designcodes/preprocessors/turbsim/. Última modificação feita
em 03/02/2011; acessado em 21/03/2011.
[17] Edenhofer, O., R. Pichs-Madruga, Y. Sokona, K. Seyboth, D. Arvizu, T. Bruckner,
J. Christensen, J.-M. Devernay, A. Faaij, M. Fischedick, B. Goldstein, G. Hansen,
J. Huckerby, A. Jäger-Waldau, S. Kadner, D. Kammen, V. Krey, A. Kumar, A.
Lewis, O. Lucon, P. Matschoss, L. Maurice, C. Mitchell, W. Moomaw, J. Moreira,
A. Nadai, L.J. Nilsson, J. Nyboer, A. Rahman, J. Sathaye, J. Sawin, R. Schaeffer,
T. Schei, S. Schlömer, R. Sims, A. Verbruggen, C. von Stechow, K. Urama, R.
Wiser, F. Yamba, T. Zwickel, 2011: Summary for Policy Makers. In IPCC
Special Report on Renewable Energy Sources and Climate Change
Mitigation [O. Edenhofer, R. Pichs-Madruga, Y. Sokona, K. Seyboth, P.
Matschoss, S. Kadner, T. Zwickel, P. Eickemeier, G. Hansen, S. Schlömer, C. v.
63
Stechow (eds)], Cambridge University Press, Cambridge, United Kingdom and
New York, NY, USA. Disponivel em http://srren.ipcc-wg3.de/report; acessado em
18/05/2011.
[18] Dubois, C. Le guide de l’éolien, techniques et pratiques. Eyrolles, Paris, 2009.
[19] Chwif, L., Medina, A.C. Modelagem e Simulação de Eventos Discretos,
Teoria & Aplicações. São Paulo, 2006.
[20] Gonçalves Rebelo da Silva, V.R. Um estudo de modelagem do sistema
hibrido MRPII/JITKANBAN aplicado em pequenas e médias empresas.
Curitiba, 2008.
[21] Camblong, H. Minimisation de l’impact des perturbations d’origine éolienne
dans la génération d’electricité par des aerogénérateurs à vitesse variable.
Bordeaux, 2003.

64
ANEXOS

65
A. CRONOGRAMA
2011
Março Abril Maio Junho
Semana de execução 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Tarefa Pesquisa bibliográfica x x
Estudo do comando CRONE e da CRONE Toolbox
x x x
Definição, estudo e inserção na Toolbox dos critérios de otimização
x x x x x
x7
Estudo do exemplo de CRONE User’s Guide
x x x
x7
Estudo do regulador para o modelo 1 de aerogerador
x
Criação do modelo 2 de aerogerador e estudo do regulador
x x x
x7
Criação do regulador racional e estudo de suas performances temporais
x x x
Elaboração de relatórios técnicos
x x x
x x x
Seminários
x
x
Tabela A.1 – Cronograma.
7 A modificação do critério energia (forma logarítmica) levou à um segundo cálculo dos reguladores.

66
B. ESTUDO DO CRITÉRIO ENERGIA
Para verificar que a minimização do erro leva ao aumento da rapidez e do
amortecimento da resposta ao degrau do sistema, os parágrafos seguintes
descrevem dois casos de estudo de regulação de uma planta simples G(s) (equação
B.1).
() = 1 B.1
Caso de estudo 1: Regulador proporcional integral com a frequência do
regulador integral igual a frequência de ganho unitário desejada para o sistema
Seja o regulador proporcional integral da equação B.2. Este caso de estudo
foi realizado para três frequências de ganho unitário ωu distintas, com ,= = ,© e o
ganho k0 calculado em cada situação para garantir o ganho unitário na frequência
ωu.
() = Tª + T= ,= ∴ () = T 1 + /,=/,= B.2
A figure B.1 mostra o resultado das simulações do sistema para um degrau
na entrada e(t). O cálculo da energia total (equação 2.19) foi feito através da área
sob a curva dos sinais de energia de erro (domínio do tempo) e S(s)/s (domínio da
frequência). Pode-se observar que o sistema mais rápido (aquele com a maior
banda passante, ωu = ωi =10 rad/s) possui uma energia menor de erro. Observa-se
também que os valores da energia total calculados no tempo e na frequência são
muito próximos, o que verifica o teorema de Parseval. As diferenças entre os valores
provêm do fato que calculo da integral no MATLAB é feito através de uma somatória
finita de valores não infinitesimais de dt e dω.

67
Figura B.1 - Primeiro caso de estudo do critério de minimização do erro (ωi= ωu). (a) Resposta ao degrau unitário; (b) função de sensibilidade complementar; (c) energia instantânea do erro, sendo Et a
energia total do erro calculada no domínio do tempo; (d) representação em frequência do critério estudado, sendo Et a energia total do erro calculada no domínio da frequência .
Caso de estudo 2: Regulador proporcional integral com a frequência do
regulador integral variável e a frequência de ganho unitário fixa
Com o mesmo regulador proporcional integral da equação B.2, neste caso
de estudo a frequência de ganho unitário é fixada em ωu = 1 rad/s e a frequência ωi
é diferente em cada simulação. Novamente o ganho k0 é calculado em cada situação
para garantir o ganho unitário na frequência ωu. Estas situações representam
sistemas de banda passante próxima, mas com amortecimentos variáveis (sendo o
menor amortecimento para ωi = 2 rad/s e o maior para ωi = 0,5 rad/s). Pode-se
observar na figura B.2 que o sistema mais amortecido possui a menor energia total
do erro.
0 2 4 6 8 100
0.5
1
1.5
Resposta au degrau unitário para ωu=ωi
Tempo(s)
Am
plitu
de
10-4
10-2
100
102
104
-80
-60
-40
-20
0
20
Módulo da função T = C*G/(1+C*G) para ωu=ωi
ω (rad/s)
Mód
ulo
(dB
)
ωi=1 rad/s
ωi=2 rad/s
ωi=10 rad/s
ωi=1 rad/s
ωi=2 rad/s
ωi=10 rad/s
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
Energia instantânea do erro para ωu=ωi
Tempo(s)
Am
plitu
de
10-4
10-2
100
102
104
-250
-200
-150
-100
-50
0
Módulo da função (S(s)/s)2/2π para ωu=ωi
ω (rad/s)
Mód
ulo
(dB
)
ωi=1, Et=0.71139
ωi=2, Et=0.35858
ωi=10, Et=0.075829
ωi=1, Et=0.70679
ωi=2, Et=0.35324
ωi=10, Et=0.070392
(c) (d)
(a) (b)
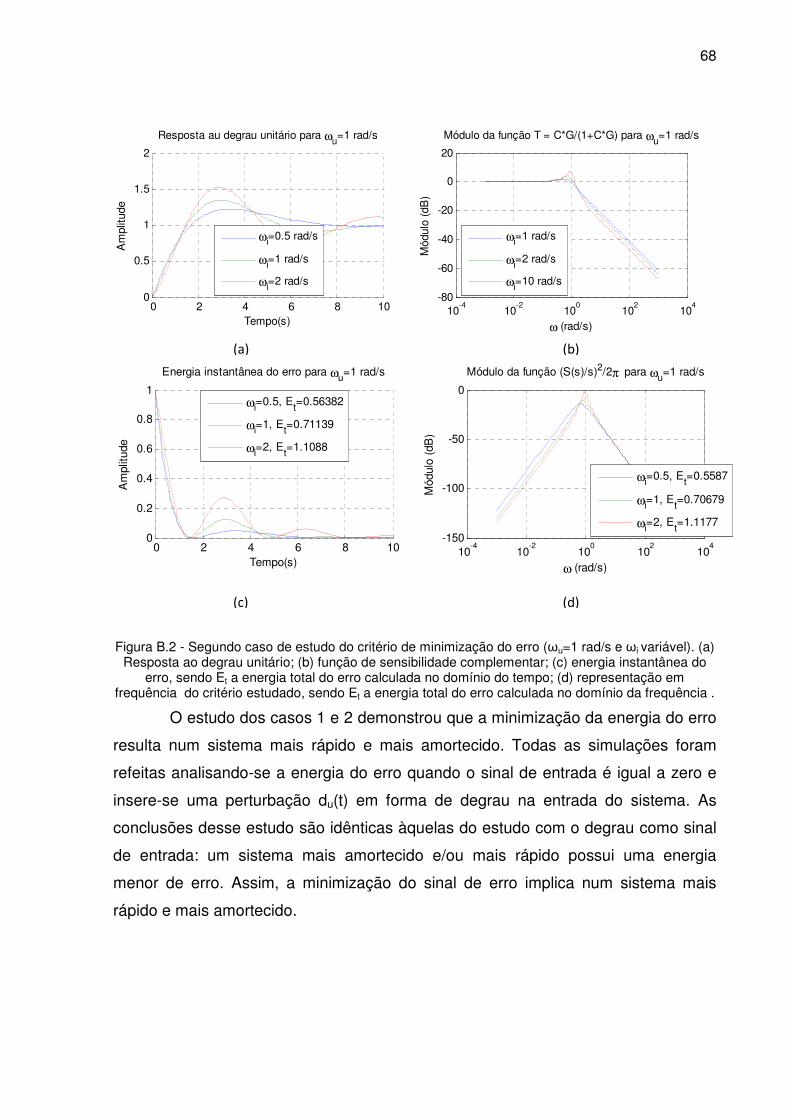
68
Figura B.2 - Segundo caso de estudo do critério de minimização do erro (ωu=1 rad/s e ωi variável). (a) Resposta ao degrau unitário; (b) função de sensibilidade complementar; (c) energia instantânea do
erro, sendo Et a energia total do erro calculada no domínio do tempo; (d) representação em frequência do critério estudado, sendo Et a energia total do erro calculada no domínio da frequência .
O estudo dos casos 1 e 2 demonstrou que a minimização da energia do erro
resulta num sistema mais rápido e mais amortecido. Todas as simulações foram
refeitas analisando-se a energia do erro quando o sinal de entrada é igual a zero e
insere-se uma perturbação du(t) em forma de degrau na entrada do sistema. As
conclusões desse estudo são idênticas àquelas do estudo com o degrau como sinal
de entrada: um sistema mais amortecido e/ou mais rápido possui uma energia
menor de erro. Assim, a minimização do sinal de erro implica num sistema mais
rápido e mais amortecido.
0 2 4 6 8 100
0.5
1
1.5
2
Resposta au degrau unitário para ωu=1 rad/s
Tempo(s)
Am
plitu
de
10-4
10-2
100
102
104
-80
-60
-40
-20
0
20
Módulo da função T = C*G/(1+C*G) para ωu=1 rad/s
ω (rad/s)
Mód
ulo
(dB
)
ωi=0.5 rad/s
ωi=1 rad/s
ωi=2 rad/s
ωi=1 rad/s
ωi=2 rad/s
ωi=10 rad/s
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
Energia instantânea do erro para ωu=1 rad/s
Tempo(s)
Am
plitu
de
10-4
10-2
100
102
104
-150
-100
-50
0
Módulo da função (S(s)/s)2/2π para ωu=1 rad/s
ω (rad/s)
Mód
ulo
(dB
)
ωi=0.5, Et=0.56382
ωi=1, Et=0.71139
ωi=2, Et=1.1088
ωi=0.5, Et=0.5587
ωi=1, Et=0.70679
ωi=2, Et=1.1177
(c) (d)
(a) (b)
69
C. FIGURAS COMPLEMENTARES DOS RESULTADOS DA OTIMIZAÇÃO
Dado o volume de informações que as figuras de comparação das funções de sensibilidade apresentam, este anexo tem
como objetivo apresentar os resultados completos não expostos no corpo deste trabalho.
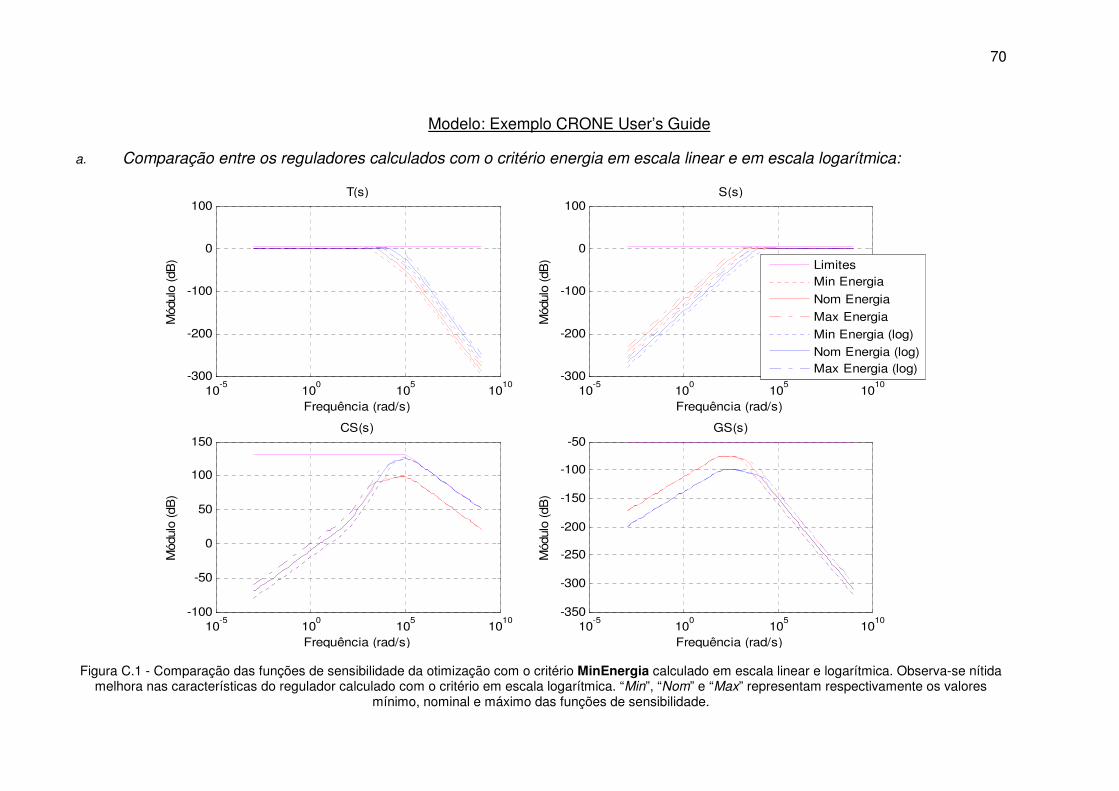
70
Modelo: Exemplo CRONE User’s Guide
a. Comparação entre os reguladores calculados com o critério energia em escala linear e em escala logarítmica:
Figura C.1 - Comparação das funções de sensibilidade da otimização com o critério MinEnergia calculado em escala linear e logarítmica. Observa-se nítida melhora nas características do regulador calculado com o critério em escala logarítmica. “Min”, “Nom” e “Max” representam respectivamente os valores
mínimo, nominal e máximo das funções de sensibilidade.
10-5
100
105
1010
-300
-200
-100
0
100T(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-300
-200
-100
0
100S(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-100
-50
0
50
100
150CS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-350
-300
-250
-200
-150
-100
-50GS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
LimitesMin Energia
Nom Energia
Max Energia
Min Energia (log)
Nom Energia (log)Max Energia (log)

71
b. Comparação entre os reguladores calculados com os três critérios, os quais possuem um único gabarito, e o regulador do
exemplo, o qual contém além do gabarito principal um gabarito em alta e outro em baixa frequência:
Figura C.2 - Comparação das funções de sensibilidade da otimização com os critérios MinGSs, MinSs e MinEnergia (calculado em escala logarítmica) e a resposta ótima do exemplo. Os reguladores calculados com os critérios propostos possuem um único gabarito, enquanto o regulador no exemplo possui
também gabaritos em alta e baixa frequência.
10-5
100
105
1010
-300
-200
-100
0
100T(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-300
-200
-100
0
100S(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-100
-50
0
50
100
150CS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-350
-300
-250
-200
-150
-100
-50GS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
LimitesMin Exemplo
Nom Exemplo
Max Exemplo
Min Critério S(s)/sNom Critério S(s)/s
Max Critério S(s)/s
Min Critério GS(s)/sNom Critério GS(s)/s
Max Critério GS(s)/s
Min Critério energia
Nom Critério energiaMax Critério energia
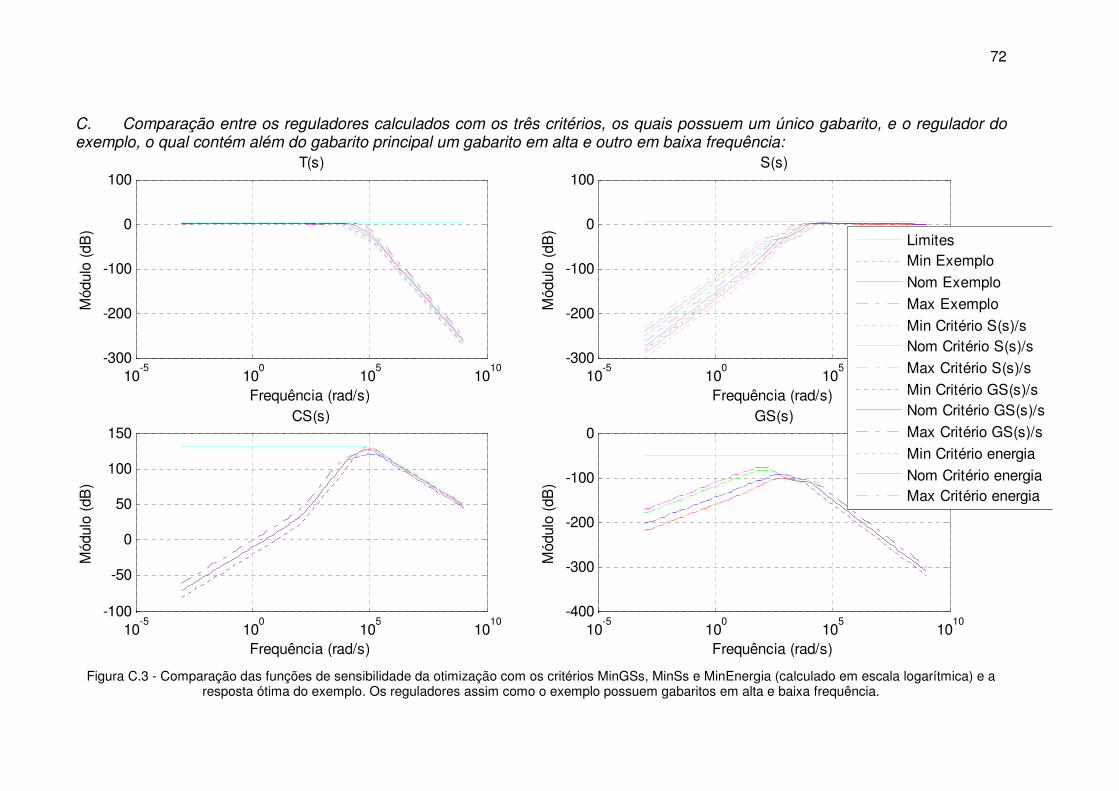
72
C. Comparação entre os reguladores calculados com os três critérios, os quais possuem um único gabarito, e o regulador do exemplo, o qual contém além do gabarito principal um gabarito em alta e outro em baixa frequência:
Figura C.3 - Comparação das funções de sensibilidade da otimização com os critérios MinGSs, MinSs e MinEnergia (calculado em escala logarítmica) e a resposta ótima do exemplo. Os reguladores assim como o exemplo possuem gabaritos em alta e baixa frequência.
10-5
100
105
1010
-300
-200
-100
0
100T(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-300
-200
-100
0
100S(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-100
-50
0
50
100
150CS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-5
100
105
1010
-400
-300
-200
-100
0GS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
LimitesMin Exemplo
Nom Exemplo
Max Exemplo
Min Critério S(s)/sNom Critério S(s)/s
Max Critério S(s)/s
Min Critério GS(s)/sNom Critério GS(s)/s
Max Critério GS(s)/s
Min Critério energia
Nom Critério energiaMax Critério energia

73
Figura C.4 - Idem figura C.3 - Detalhe nas regiões de interesse.
103
104
-6
-4
-2
0
2
4
T(s)
Frequência (rad/s)
Mód
ulo
(dB
)
104
105
-10
-5
0
5
S(s)
Frequência (rad/s)
Mód
ulo
(dB
)
104
105
106
100
110
120
130
140CS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
-140
-120
-100
-80
-60
-40GS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
LimitesMin Exemplo
Nom Exemplo
Max Exemplo
Min Critério S(s)/sNom Critério S(s)/s
Max Critério S(s)/s
Min Critério GS(s)/sNom Critério GS(s)/s
Max Critério GS(s)/s
Min Critério energia
Nom Critério energiaMax Critério energia
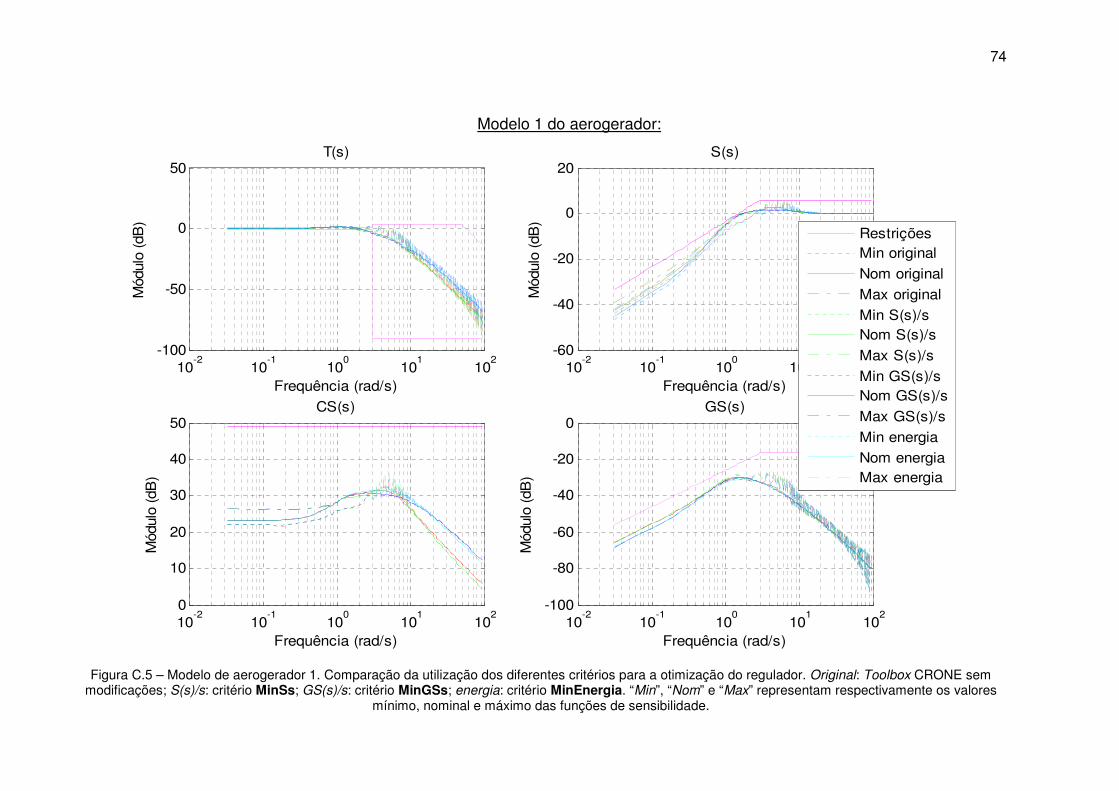
74
Modelo 1 do aerogerador:
Figura C.5 – Modelo de aerogerador 1. Comparação da utilização dos diferentes critérios para a otimização do regulador. Original: Toolbox CRONE sem modificações; S(s)/s: critério MinSs; GS(s)/s: critério MinGSs; energia: critério MinEnergia. “Min”, “Nom” e “Max” representam respectivamente os valores
mínimo, nominal e máximo das funções de sensibilidade.
10-2
10-1
100
101
102
-100
-50
0
50T(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-2
10-1
100
101
102
-60
-40
-20
0
20S(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-2
10-1
100
101
102
0
10
20
30
40
50CS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
10-2
10-1
100
101
102
-100
-80
-60
-40
-20
0GS(s)
Frequência (rad/s)
Mód
ulo
(dB
)
RestriçõesMin original
Nom original
Max original
Min S(s)/sNom S(s)/s
Max S(s)/s
Min GS(s)/sNom GS(s)/s
Max GS(s)/s
Min energia
Nom energiaMax energia





























