Embed Size (px)
DESCRIPTION
Operadores e Matrizes
Citation preview
![Page 1: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/1.jpg)
Operadores Lineares e Matrizes
Uma Distinção Fundamental em Álgebra Linear
Prof. Carlos R. Paiva
![Page 2: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/2.jpg)
Operadores Lineares e Matrizes
1
Comecemos por apresentar a definição de operador linear entre dois espaços lineares (ou
vectoriais) complexos. O caso dos espaços lineares reais pode ser considerado como um caso
particular de um espaço linear definido sobre o corpo .
Definição. Um operador linear (ou uma transformação linear) de um espaço linear (ou
vectorial) V para um espaço linear W , definidos sobre o corpo (dos números complexos),
é uma aplicação :V Wf tal que
, , , ,V u v u v u vf f f .
O operador linear é um endomorfismo quando W V .
Exemplos
1. Seja 2: :f x x . Como 2 2 2 2 22f x y x y x x y y ,
2f x x e 2f y y , é f x y f x f y . Não se trata, portanto, de
um operador linear.
2. Seja : :g x a x b . Logo g x y a x y b a x a y b ,
g x a x b a x b e g y a y b a y b . O operador só
é linear quando b b b b . Porém, como e são números reais
quaisquer, infere-se que tal só será possível para 0b . Quando 0b o operador não é
linear.
3. Façamos 2: : 2 ,
3
tt t
T . Então 1 2
1 2 1 22 2 ,3
x xx x x x
T ,
11 12 ,
3
xx x
T , 2
2 22 ,3
xx x
T e 1 2 1 2x x x x T T T .
Este é, assim, um operador linear.
![Page 3: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/3.jpg)
2 Carlos R. Paiva
4. Consideremos o operador 2 2: : , cos sin , sin cosx y x y x y R .
Uma forma de representar este operador é através de uma matriz de rotação no plano, i.e.,
cos sin
sin cos
x x
y y
R . Tem-se sucessivamente
1 2 1 2
1 2 1 2
1 2
1 2
1 2
1 2
cos sin
sin cos
cos sin cos sin
sin cos sin cos
x x x x
y y y y
x x
y y
x x
y y
R
R R
pelo que se trata, também aqui, de um
operador linear. Do ponto de vista
geométrico podemos escrever
Rv u , em que 1 2x y u e e e
1 2x y v e e , tendo-se considerado
uma base 1 2, e e ortonormada em
2, i.e.,
1,
0,j k j k
j k
j k
e e
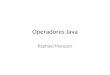
onde j k é o delta de Kronecker. A figura anexa representa esta operação de rotação
2 2, ,x y x y u v em que cos sinx x y e sin cosy x y .
Pode-se inferir o sentido da rotação com base no produto externo u v desde que se
entenda que , ,0x yu e , ,0x y v :
1 2 3
22 2
3 3 30 sin sin
0
x y x y yx x y
x y
e e e
u v e e u e .
Tem-se, ainda, 22 2 cos cosx x y y x y u v u . Note-se que o comprimento
de cada vector não se altera: 2 22 2x y x y , i.e.,
2 2u v . No caso particular
em que 0 obtém-se 0 u v ; quando 2 obtém-se 0 u v e 2
3 u v u e .
■
X
Y
x x
y
y
u
v
1e
2e
![Page 4: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/4.jpg)
Operadores Lineares e Matrizes
3
Notação. Usam-se, em geral, letras de fontes não-serifadas («arial») para designar os
operadores lineares. As únicas excepções correspondem aos casos mais simples em que: (i)
:f V , com V ; (ii) :f V , com V . Usam-se letras minúsculas a negrito
(«bold») para representar vectores (e.g., , Vu v ). Usam-se letras gregas minúsculas para
representar escalares (e.g., , ou , ). Usam-se letras maiúsculas a negrito para
representar matrizes ou tensores: e.g., , Mat ,n n A B , onde («euclid math two»)
é uma letra genérica que designa um corpo (em inglês um corpo designa-se por «field»).
Geralmente , . Designa-se por Mat ,n , ou n , o espaço linear das matrizes
quadradas n n definidas sobre o corpo . Note-se por fim que, ao definir uma aplicação, se
escreve : :f A B x y significando, com isso, que f A B e ainda que y f x .
Coloca-se, agora, a seguinte questão: qual é a relação existente entre um dado
operador linear e a sua representação matricial? A resposta é simples: sendo A a matriz que
corresponde ao operador linear : n mV Wf , o respectivo elemento matricial j k pode obter-
se uma vez fixadas as bases de cada espaço. Admitindo que o espaço linear nV tem uma base
1
n
V j j a e o espaço linear mW tem uma base
1
m
W k k b , tendo-se portanto
dim nV n e dim mW m , então as colunas da matriz A são dadas por
1
, 1,2, ,m
j k j k
k
j n
a bf .
Nota. Apenas quando a base 1
m
W k k b é ortonormada, com
1,
0,i j i j
i j
i j
b b ,
é que, desta equação, se tira (fazendo o produto interno de a ambos os membros por b )
1 1
m m
j k j k k j k j
k k
b a b bf
j k j k b af .
![Page 5: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/5.jpg)
4 Carlos R. Paiva
Obtém-se, deste modo, a matriz m n :
11 12 1
21 22 2
1 2
n
n
m m mn
A .
Existe, deste modo, um isomorfismo entre o espaço linear ,n mV WL dos operadores lineares
de nV em
mW e o espaço linear Mat ,m n das matrizes m n definidas sobre o corpo .
Exemplo. Determinemos a representação matricial do operador linear 3f L (i.e., onde
3 3: f ) tal que
2
3
2
x x y z
y x z
z y z
f
mas considerando a seguinte base para 3: 1 2 3, , a a a com
1 2 3
1 1 0
1 , 0 , 1 .
0 1 1
a a a
Note-se que se trata de uma base que não é ortogonal (e, muito menos, ortonormada...). Mas
é, como não podia deixar de ser (por definição de base), um conjunto de três vectores
linearmente independentes:
1 2 3 123 123
1 1 0
1 0 1 2 0
0 1 1
a a a e e .
Existe um erro corrente que consiste em dizer que a matriz Α associada deverá ser
1 1 2
3 0 1
0 2 1
M .
Porém, isso é – como se irá mostrar neste exemplo – falso. Para obter a primeira coluna da
matriz Α , façamos
![Page 6: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/6.jpg)
Operadores Lineares e Matrizes
5
11
1 11 21 31 21
31
1
21 0 1 1 01
1 3 1 0 12
0 2 0 1 15
2
af f .
Para obter a segunda coluna, vem
12
2 12 22 32 22
32
1 3 1 1 0 2
0 2 1 0 1 1
1 1 0 1 1 0
af f .
Finalmente, para obter a terceira coluna,
13
3 13 23 33 23
33
3
20 1 1 1 05
1 1 1 0 12
1 3 0 1 11
2
af f .
A matriz pretendida será então
1 32
2 2
1 51
2 2
5 10
2 2
A .
Note-se, porém, que
2 2
3 3
2 2
x x y z x x y z
y x z y x z
z y z z y z
Af
o que mostra que é necessário ter cuidado. Com efeito, tem-se
1 2 3
1 0 0
0 1 0
0 0 1
x
y x y z x y z
z
e e e
(i.e., na base canónica de 3) mas, na base considerada, é
1 1 2 2 3 3 1 2 3
1 1 0
, , , , , , 1 0 1
0 1 1
x
y x y z x y z x y z
z
a a a
![Page 7: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/7.jpg)
6 Carlos R. Paiva
1
2
3
1 1 1
2 2 2
1 1 1
2 2 2
1 1 1
2 2 2
x y z
x y z
x y z
.
De forma análoga, vem sucessivamente
1
1 1 2 2 3 3 1 2 3 2
3
32
22 1 1 01
3 1 0 1 22
2 0 1 13
2
x y
x x y z
y x z x y z
z y z
x y z
a a af
Agora, com efeito, obtém-se (como se pode facilmente verificar)
1 1
2 2
3 3
1 1 1 32
2 2 2 2
1 1 1 12
2 2 2 2
1 1 1 3
2 2 2 2
x y z x y
x y z x y z
x y z x y z
A A
1 3 1 1 1 32 2
2 2 2 2 2 2
1 5 1 1 1 11 2
2 2 2 2 2 2
5 1 1 1 1 30
2 2 2 2 2 2
x y z x y
x y z x y z
x y z x y z
.
■
Problema 1. O operador linear 3 2: f é dado por
2 3
xx y z
yx y z
z
f .
Mostre que a correspondente matriz, para as bases canónicas de 3 e
2, é
2 1 3
1 1 1
A .
![Page 8: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/8.jpg)
Operadores Lineares e Matrizes
7
Problema 2. Considere o operador linear 3 3: g tal que
1 1 2 3
2 1 3
3 1 2
2
2
x x x x
x x x
x x x
g .
Mostre que, na base canónica de 3 , a correspondente matriz é
1 1 1
2 0 1
1 2 0
A
enquanto que, na base
1 2 3
1 1 0
1 , 0 , 2
0 1 3
a a a ,
a correspondente matriz é
4 3 15
6 1 14
3 0 6
B .
Problema 3. Demonstre as fórmulas
1 2 1 2 1 2
1 2 1 2 1 2
cos cos cos sin sin
sin sin cos cos sin
notando que a rotação de um ângulo 1 2 no plano ,x y é o produto de duas rotações
1 2 2 1 R R R R em que
cos sin
sin cos
R .
Vejamos, agora, o que acontece numa mudança de base, i.e., quando se passa de uma
base 1
n
i i a para uma nova base
1
n
i i a . Dado um vector a , tem-se
1 1
n n
i i j j
i j
a a a .
![Page 9: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/9.jpg)
8 Carlos R. Paiva
Porém, existe uma relação linear entre as duas bases:
1
n
i ji i
j
a a .
Assim, depois de substituir esta relação na anterior, vem
1 1 1
n n n
i ji j j j
i j j
a a a
1
, 1,2, ,n
j ji i
i
j n
.
Em termos matriciais podemos ainda escrever esta última equação na forma
1 11 12 1 1
2 21 22 2 2
1 2
n
n
n n n nn n
a R a .
Quando se muda de base, a matriz A da base 1
n
i i a dará lugar a uma nova matriz A
correspondente à nova base 1
n
i i a . Tem-se, então,
b = Aa b Rb
b = A a a Ra
donde
1 Rb A Ra b R A R a
1 1 A R A R A R AR .
As matrizes A e A dizem-se semelhantes e a relação entre elas uma transformação de
semelhança. Note-se que, apesar de se tratar de duas matrizes diferentes, elas devem
representar o mesmo operador linear.
Exemplo. Consideremos a mudança de base do Problema 2. Nesse problema começou-se por
considerar a base canónica de 3, tal que 1 2 3, , e e e , onde se tem
1 2 3
1 0 0
0 , 1 , 0
0 0 1
e e e .
A outra base considerada foi 1 2 3, , a a a em que
![Page 10: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/10.jpg)
Operadores Lineares e Matrizes
9
1 2 3
1 1 0
1 , 0 , 2
0 1 3
a a a .
Logo
11
1 11 1 21 2 31 3 11 21 31 21
31
1 1 1 0 2
0 1 0 2 3
0 0 1 3 1
e a a a
12
2 12 1 22 2 32 3 12 22 32 22
32
0 1 1 0 3
1 1 0 2 3
0 0 1 3 1
e a a a
13
3 13 1 23 2 33 3 13 23 33 23
33
0 1 1 0 2
0 1 0 2 2
1 0 1 3 1
e a a a
de forma que a matriz de mudança de base é então
1
2 3 2 1 1 0
3 3 2 1 0 2
1 1 1 0 1 3
R R .
Nestas condições, a relação entre a matriz B e a matriz A do mesmo Problema 2 deverá ser
1B R AR .
Efectivamente, tem-se
4 3 15 2 3 2 1 1 1 1 1 0
6 1 14 3 3 2 2 0 1 1 0 2
3 0 6 1 1 1 1 2 0 0 1 3
.
■
Problema 4. Seja a matriz A de um endomorfismo 3 3: T em relação à base canónica
1 2 3, , e e e tal que
0 1 1
1 0 1
1 1 0
A .
![Page 11: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/11.jpg)
10 Carlos R. Paiva
Mostre que a representação matricial do operador linear T na nova base 1 2 3, , a a a tal
que
1 2 3
0 1 1
1 , 1 , 1
1 1 0
a a a
corresponde à matriz
1 1
1 0 0 1 1 0 0 1 1
0 0 0 , 1 1 1 , 1 1 1
0 0 1 0 1 1 1 1 0
B R A R R R .
Confirme o seu resultado notando que, de acordo com a base canónica, o operador linear em
causa é tal que
x y z
y x z
z x y
T .
Recordemos, agora, como determinar a inversa de uma matriz A não singular. Tem-
se, como é sabido,
1
adj
det
A
AA
.
Exemplo. Determine a inversa da matriz
11 12 13
21 22 23
31 32 33
3 1 2
1 0 3
2 1 1
A .
Comecemos por calcular o respectivo determinante. Vem
11 11 12 12 13 13det 3 3 1 7 2 1 4 A
já que se tem
![Page 12: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/12.jpg)
Operadores Lineares e Matrizes
11
1 1
11
1 2
12
1 3
13
0 31 3
1 1
1 31 7
2 1
1 01 1
2 1
.
Por outro lado a matriz adjunta é dada por
11 12 13
21 22 23
31 32 33
3 7 1 3 1 3
adj 1 1 1 7 1 11
3 11 1 1 1 1
T T
A .
Logo
1
3 1 3 0.75 0.25 0.751 1
adj 7 1 11 1.75 0.25 2.754
1 1 1 0.25 0.25 0.25
A A .
Facilmente se verifica que, com efeito, é
1 1
1 0 0
0 1 0
0 0 1
A A A A I .
■
Problema 5. Mostre que a matriz inversa da matriz
1 2 1
0 1 2
2 1 1
A
é a matriz
1
1 1 3 0.2 0.2 0.61
4 1 2 0.8 0.2 0.45
2 3 1 0.4 0.6 0.2
A .
![Page 13: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/13.jpg)
12 Carlos R. Paiva
Existe uma forma diferente de calcular o determinante. Seja : n nV Vf um
endomorfismo de nV , com dim nV n , tal que a bf em que, portanto, , nVa b . Se
1
n
i i a é uma base do espaço linear
nV , então
1 2 1 2detn n a a a a a af f .
Exemplo. Voltemos a considerar a matriz
3 1 2
1 0 3
2 1 1
A .
Na base canónica de 3, em que se tem
1 2 3
1 0 0
0 , 1 , 0
0 0 1
e e e ,
esta matriz corresponde ao operador linear
3 2
3
2
x x y z
y x z
z x y z
f .
Em particular, virá
1 1 2 2 3 3
1 3 0 1 0 2
0 1 , 1 0 , 0 3
0 2 0 1 1 1
e f e f e ff f f f f f
1 2 3 1 2 3 1 2 3det e e e e e e e e ef f f f f
1 2 3 123det f f f ef .
Logo, com efeito, tem-se
1 2 3 123
3 1 2 3 1 2
1 0 1 det 1 0 1 4
2 3 1 2 3 1
f f f e f .
Note-se o significado geométrico: det f corresponde ao volume orientado do trivector
1 2 3 f f f .
■
![Page 14: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/14.jpg)
Operadores Lineares e Matrizes
13
Exemplo. Calculemos, agora, o determinante do operador linear considerado no Problema 2.
Consideremos a base
1 2 3
1 1 0
1 , 0 , 2
0 1 3
a a a .
Nesta base, tem-se
1 1 2 2 3 3
1 2 1 2 0 1
1 2 , 0 3 , 2 3
0 3 1 1 3 4
a g a g a gg g g g g g
pelo que
1 2 3 1 2 3 1 2 3 1 2 3det a a a a a a g g g a a ag g g g g
1 2 3 123
1 2 3 123
det
g g g e
a a a eg .
Como
1 2 3 123 123 1 2 3 123 123
2 2 3 1 1 0
2 3 1 3 , 1 0 1
1 3 4 0 2 3
g g g e e a a a e e
infere-se que
det 3
g .
Note-se que, ainda no âmbito do Problema 2, se tem
1 1 1 4 3 15
det 2 0 1 det 6 1 14 det 3
1 2 0 3 0 6
A B g .
Ou seja: o determinante é um invariante próprio de um operador linear e, consequentemente, é
sempre o mesmo para todas as matrizes relacionadas entre si por uma transformação de
semelhança. Portanto, para calcular o determinante de um operador linear, é geralmente mais
fácil fazê-lo através da base canónica.
■
![Page 15: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/15.jpg)
14 Carlos R. Paiva
Além do determinante, existe um outro invariante importante relacionado com matrizes
semelhantes – o traço. Define-se o traço de uma matriz como sendo a soma dos seus
elementos diagonais.
Sejam A e A duas matrizes semelhantes, i.e., com
1 A R AR .
Então, vem sucessivamente
1 1
det detdet det det det det det
det
R A
A R A R R A R AR
.
Para o traço, vem também
1 1 1 1tr tr tr tr tr tr tr
A R AR R AR AR R A R R AI A .
Assim, e.g., no Problema 2, tem-se
1 1 1 4 3 15
tr tr 2 0 1 tr tr 6 1 14 tr 1
1 2 0 3 0 6
A B g .
Apresentam-se, de seguida, duas relações importantes que relacionam o determinante com o
traço.
Para endomorfismos de dimensão 2, tem-se
2 21det tr tr
2 f f f .
Para endomorfismos de dimensão 3, tem-se
3 2 31det tr 3tr tr 2 tr
6 f f f f f .
Calculemos, agora, a exponencial de uma matriz. Por definição, escreve-se
0
exp!
m
m m
A
A .
Estamos a admitir que Mat ,nA com , .
![Page 16: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/16.jpg)
Operadores Lineares e Matrizes
15
Exemplo. Calculemos exp A para (com , ,a b c )
0
0 0
0 0 0
a b
c
A .
Comecemos por notar que esta matriz é nilpotente já que se tem 3 0A :
2 3
0 0 0 0 0
0 0 0 , 0 0 0 0
0 0 0 0 0 0
ac
A A .
Logo, vem
2
11
1 0 0 0 0 0 21
exp 0 1 0 0 0 0 0 0 0 12 2
0 0 1 0 0 0 0 0 0 0 0 1
a b aca b ac
c c
AA I A .
Infere-se, deste modo, que
0 11
exp 0 0 0 12
0 0 0 0 0 1
a
a b
b ac c
c
.
Exemplo. Seja 1X R DR . Vamos mostrar que, neste caso, se tem
1 1exp exp exp X R DR R D R .
Comecemos por notar que
2
1 1 1 1 1 1 2 1 R DR R DR R DR R D R R DR R DI DR R D R .
Analogamente, tem-se
1 1m
m R DR R D R .
Logo, infere-se que
1 1
1 1 1
0 0 0
exp exp! ! !
mm m
m m mm m m
R DR R D R DR DR R R R D R .
![Page 17: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/17.jpg)
16 Carlos R. Paiva
Exemplo. Vamos, agora, calcular expY X para
0
0
X .
Notemos que esta matriz é semelhante à matriz
0
0
i
i
D
já que se tem
1X R DR
em que
11 11
,1 12
i i
i i
R R .
Com efeito,
11 0 1 01
1 0 1 02
i i i
i i i
R DR X .
Mas então, vem
1 11 101
exp exp exp1 12 0
i
i
i ie
i ie
X R DR R D R
cos sin
expsin cos
Y X
que corresponde, como se viu anteriormente, à matriz de rotação do plano.
Problema 6. Mostre que, para qualquer matriz X do tipo 2 2 com traço nulo, i.e., com
a b
c a
X ,
se tem
2 det X X I .
Mostre, em seguida, que se tem
sin detexp cos det
det
XX X I X
X.
![Page 18: [P27] Operadores Lineares e Matrizes](https://reader034.document.onl/reader034/viewer/2022051017/563dba00550346aa9aa1d592/html5/thumbnails/18.jpg)
Operadores Lineares e Matrizes
17
Note que, como cos e sin são funções pares de , esta expressão não depende do sinal
escolhido no cálculo de det X . Além disso, quando det 0X , esta expressão deve ser
interpretada como dando
exp X I X .
Use este resultado para provar que
0 cos sin
exp0 sin cos
.