Embed Size (px)
Citation preview

Universidade Estadual de CampinasFaculdade de Tecnologia
Paulo Cezar Kretikouski Roque
CONTROLE DE UM PROTÓTIPO DE CADEIRA DERODAS ATRAVÉS DE UMA INTERFACE
CÉREBRO-COMPUTADOR
Limeira, 2017

Paulo Cezar Kretikouski Roque
CONTROLE DE UM PROTÓTIPO DE CADEIRA DE RODASATRAVÉS DE UMA INTERFACE CÉREBRO-COMPUTADOR
Dissertação apresentada à Faculdade deTecnologia da Universidade Estadual deCampinas como parte dos requisitos para aobtenção do título de Mestre em Tecnologia, naárea de Sistemas de Informação e Comunicação.
Orientadora: Profa. Dra. Talía Simões dos Santos Ximenes
Este exemplar corresponde à versão final daDissertação defendida por Paulo CezarKretikouski Roque e orientada pela Profa.Dra. Talía Simões dos Santos Ximenes.
Limeira, 2017

Agência(s) de fomento e nº(s) de processo(s): Não se aplica.
Ficha catalográficaUniversidade Estadual de Campinas
Biblioteca da Faculdade de TecnologiaMaria Lúcia Nery Dutra de Castro - CRB 8/1724
Kretikouski Roque, Paulo Cezar, 1991- K885c KreControle de um protótipo de cadeira de rodas através de uma interface
cérebro-computador / Paulo Cezar Kretikouski Roque. – Limeira, SP : [s.n.],2017.
KreOrientador: Talía Simões dos Santos Ximenes. KreDissertação (mestrado) – Universidade Estadual de Campinas, Faculdade
de Tecnologia.
Kre1. Interfaces cérebro-computador. 2. Eletroencefalografia. 3.
Microcontroladores. I. Santos, Talía Simões dos, 1980-. II. UniversidadeEstadual de Campinas. Faculdade de Tecnologia. III. Título.
Informações para Biblioteca Digital
Título em outro idioma: Control of a wheelchair prototype through a brain computerinterfacePalavras-chave em inglês:Brain-computer interfacesElectroencephalographyMicrocontrollersÁrea de concentração: Sistemas de Informação e ComunicaçãoTitulação: Mestre em TecnologiaBanca examinadora:Talía Simões dos Santos Ximenes [Orientador]Edson Luiz UrsiniVicente Idalberto Becerra SablónData de defesa: 17-11-2017Programa de Pós-Graduação: Tecnologia
Powered by TCPDF (www.tcpdf.org)

Universidade Estadual de CampinasFaculdade de Tecnologia
Paulo Cezar Kretikouski Roque
CONTROLE DE UM PROTÓTIPO DE CADEIRA DE RODASATRAVÉS DE UMA INTERFACE CÉREBRO-COMPUTADOR
Banca Examinadora:
• Dra. Talía Simões dos Santos XimenesFT/UNICAMP
• Dr. Vicente Idalberto Becerra SablonUNIMEP
• Dr. Edson Luiz UrsiniFT/UNICAMP
A ata da defesa com as respectivas assinaturas dos membros da banca encontra-se noprocesso de vida acadêmica do aluno.
Limeira, 17 de novembro de 2017

Nosso cérebro é o melhor brinquedo já criado:nele se encontram todos os segredos, inclusiveo da felicidade.
(Charles Chaplin)

Agradecimentos
Agradeço aos meus pais pelo apoio moral e financeiro em todo esse tempo no mestrado.À Prof. Talía que aceitou me orientar e me deu suporte em vários aspectos.Ao Professor Edson Luiz Ursini que deu muito apoio e incentivou no trabalho.Agradeço ao Leonardo Takahashi e ao Lucas Helt pelas idéias com relação ao desenvolvi-mento do sistema, e ao Alisson David Dantas com relação à escrita.Agradeço a todos os amigos que apoiaram e me ajudaram em todos os momentos dedesânimo e alegrias que marcaram esta trajetória.E sou grato a Deus por ter me dado a chance me tornar um mestre.

Resumo
O presente trabalho tem como objetivo desenvolver um sistema que utilize a atividadecerebral para comandar um protótipo de uma cadeira de rodas. Utilizando a atividadecerebral para controle, o sistema possibilita a utilização por usuários que possuem di-ficuldades motoras severas. O trabalho utiliza o capacete Emotiv Epoc para obter aeletroencefalografia do usuário, e classificá-lo por meio de um software do próprio capa-cete. O sistema desenvolvido captura a resposta do software e envia um comando aoprotótipo da cadeira de rodas. O modelo prático feito demonstra a possibilidade de cons-truir um meio de locomoção comandado por uma Interface Cérebro-Computador. Foramfeitos testes para analisar os movimentos do protótipo e treinos para controlar o sistema.Os testes com os movimentos demonstram uma resposta satisfatória do protótipo com acadeira de rodas. Para o controle, foi possível testar até dois movimentos com sucesso. Osistema demonstra que é possível desenvolver um meio de locomoção utilizando a ativi-dade cerebral para o controle.
Palavras-chave: Interfaces cérebro-computador, Eletroencefalografia, Microcontrolado-res.

Abstract
The aim of the current work is to develop a system which uses brain activity to commanda wheelchair prototype. By using brain activity for control, this system makes it possiblefor users, who have severe motor disorders, to command it. Thus, a Emotiv Epoc head-set has been employed, in order to acquire and classify the electroencephalography fromthe user through the headset software itself. The system developed, captures softwareresponses and sends commands to the wheelchair prototype. The practical model hasshown that is possible to build a locomotion system commanded by a Brain ComputerInterface. Throughout the development of this project, tests have been performed toevaluate the prototype movements. In addition, a routine of training has been conductedin order to test the control of the wheelchair. These movement tests performed on theprototype-wheelchair has presented satisfying response results. Regarding the control, itwas possible to evaluate two movements successfully. This work demonstrates that it ispossible to develop a locomotion system by using brain activity for control.
Keywords: Brain-computer interfaces, Electroencephalography, Microcontrollers.

Lista de Figuras
1.1 Esquemático de uma BCI . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1 Lobos e fissuras do cerebro . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2 Regiões do cerebro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3 Hiperplano no SVM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1 Capacete Emotiv Epoc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2 Sistema Internacional 10-20 . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3 Demonstrativo de qualidade dos eletrodos . . . . . . . . . . . . . . . . . . 253.4 Facial Expression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.5 Performance Metrics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.6 Inertial Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.7 Mental Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1 Mapa conceitual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.2 Protótipo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.3 Movimentos da cadeira . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.4 Varredura de imagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.5 Fluxograma Python . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.6 Esquema Bluetooth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.7 Módulo Bluetooth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.8 Ponte H e motores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.9 Fluxograma Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.1 Esquemático do projeto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.1 Foto sequencial do protótipo . . . . . . . . . . . . . . . . . . . . . . . . . . 40

Lista de Abreviações e Siglas
BCI - Interface Cérebro-Computador, do inglês, Brain Computer Interface
EEG - Eletroencefalografia ou Eletroencefalograma
ERD - Event Related Desynchronization
ERP - Potenciais Relacionados a Eventos, do inglês, Event Related Potentials
ERS - Event Related Synchronization
MT - Tarefas Mentais, do inglês, Mental Tasks
SCP - Potencial Cortical Lento, do inglês, Slow Cortical Potential
SSVEP - Potencial Visual Evocado em Estado de Equilíbrio, do inglês, Steady StateVisual Evoked Potentials
TVEP - Potencial Visual Evocado Transitório, do inglês, Transient Visual Evoked Po-tentials
USB - Universal Serial Bus
VEP - Potencial Visutal Evocado, do inglês, Visual Evoked Potentials
SDK - Software Development Kit

Sumário
1 Introdução 121.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2 Fundamentação Teórica 152.1 O cérebro e suas áreas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2 Aquisição de sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.3 Pré-processamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.4 Extração de características . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4.1 Visual Evoked Potential . . . . . . . . . . . . . . . . . . . . . . . . 182.4.2 Slow Cortical Potential . . . . . . . . . . . . . . . . . . . . . . . . . 182.4.3 P300 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.4.4 Ritmos Mu e Beta . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.5 Classificação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.5.1 Support Vector Machine . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6 Aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3 Emotiv Epoc 233.1 Emotiv Xavier Control Panel . . . . . . . . . . . . . . . . . . . . . . . . . 243.2 Aplicações com Emotiv Epoc . . . . . . . . . . . . . . . . . . . . . . . . . 27
4 Sistema Desenvolvido 294.1 Python . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2 Bluetooth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.3 Arduino e o circuito para os motores . . . . . . . . . . . . . . . . . . . . . 34
5 Metodologia 37
6 Resultados e Discussões 396.1 Movimentos da cadeira . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396.2 Dificuldade do controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396.3 Sistema em Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
7 Conclusões 427.1 Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Referências Bibliográficas 44

Capítulo 1
Introdução
Apesar de parecer futurista e digna de filmes de ficção científica, uma interface para acomunicação direta do cérebro com máquinas se tornou possível através da Interface Cére-bro Computador (BCI, do inglês Brain Computer Interface). Uma BCI tem por objetivoutilizar sinais gerados pelo Sistema Nervoso Central para controle de alguma aplicação,não dependendo de músculos ou nervos (Sistema Nervoso Periférico) (BARBOSA, 2012).
A comunicação direta com o cérebro, sem depender do Sistema Nervoso Periférico,abre uma nova opção de interação. Por meio de um sistema que utiliza o BCI é possíveldesenvolver sistemas que possam, por exemplo, acionar movimentos e ajudar pessoasque possuem dificuldades motoras. Pessoas que sofrem com incapacidades físicas de altograu (como nos caso da tetraplegia e da Esclerose Lateral Amiotrófica), mas que possuematividade cerebral inalterada, a BCI se torna uma alternativa para auxiliar a comunicação,mobilidade, movimento de robôs auxiliares, entre outros.
Por mais que pareça uma área nova, um trabalho que utiliza BCI foi sugerido porVidal na década de 1970 (VIDAL, 1973). A pesquisa tem crescido junto com os desafios,pois é uma pesquisa que envolve diferentes áreas como neurociência, processamento desinais, programação e engenharia.
De modo geral, uma BCI se divide entre: aquisição de sinais; pré-processamento;classificação; aplicação; como mostrado na Figura 1.1.
A aquisição dos sinais pode ser feita por vários métodos diferentes e consiste em captara atividade cerebral. O pré-processamento trata ruídos e interferências do sinal bruto,para ser processado posteriormente. A etapa de classificação tem por finalidade encontraro padrão da atividade cerebral do usuário. Para que possa ser classificado é precisoextrair a característica de determinado padrão na atividade cerebral por meio de algumtreinamento. Então é analisado o sinal adquirido a fim de encontrar esse padrão no sinal eclassificá-lo. Esses padrões da atividade cerebral vão ser mostrados mais especificamentena Seção 2.4. Após classificado o sinal, ele é convertido em um comando para um softwareou máquina, o que caracteriza sua aplicação.
12

CAPÍTULO 1. INTRODUÇÃO 13
Figura 1.1: Esquemático de uma Interface Cérebro-Computador.
Com relação ao sinal e à classificação, é possível trabalhar com BCI de duas formas,online ou offline. Quando a BCI é online, é feito o processamento do sinal obtido em temporeal, portanto é esperado um tempo de processamento menor para receber o resultadorapidamente. Uma BCI offline não precisa ser processada rapidamente, pois não dependede tempo de resposta e obtêm precisão máxima.
O processamento também pode se dividir em síncrono e assíncrono. No caso de umaBCI síncrona, é levado em conta um intervalo constante de tempo para interpretar osinal. Contando que temos um sinal que varia muito, teremos um comando reconhecidoindependentemente da vontade do usuário de comandar ou não. No caso da assíncrona,o comando só é reconhecido conforme o desejo do usuário.
A dissertação está dividida em 7 capítulos que possuem informações sobre a parteteórica e o sistema desenvolvido. Capítulo 2 possui informações sobre o cérebro e explicasobre as componentes de uma BCI. O Capítulo 3 fala diretamente do capacete EmotivEpoc usado para o trabalho e sobre algumas pesquisas que utilizam o capacete. O Capí-tulo 4 fala sobre o sistema desenvolvido, cada parte do sistema e seu funcionamento. Ametodologia é encontrada no Capítulo 5. O Capítulo 6 apresenta e discute os resultados.O Capítulo 7 conclui o trabalho.
1.1 Motivação
A possibilidade de desenvolver sistemas para auxiliar pessoas que não possuem osmovimentos motores se tornou a principal motivação para o projeto.

CAPÍTULO 1. INTRODUÇÃO 14
Outra motivação é começar uma linha de pesquisa na área de BCI, possibilitandoum maior envolvimento entre a sociedade e o Laboratório de Sistemas Embarcados daFaculdade de Tecnologia (FT) – UNICAMP.
1.2 Objetivos
O objetivo geral é desenvolver um sistema que possa utilizar os sinais do Emotiv Epocpara acionar ou controlar um protótipo de cadeira de rodas. O modelo prático tem porobjetivo demonstrar a possibilidade de criar um sitema de locomoção por meio de umaBCI.
Como objetivos específicos temos:
• Revisão Bibliográfica e estudo sobre BCI.
• Método de utilização do Emotiv Epoc.
• Um sistema de treino e classificação dos sinais obtidos pelo Emotiv Epoc.
• Comunicação entre a base de processamento dos sinais (computador) e o microcon-trolador do protótipo da cadeira.
• Circuito para controle dos motores.
• Programação do microcontrolador para controlar o protótipo da cadeira.

Capítulo 2
Fundamentação Teórica
Como já dito, uma BCI abrange muitas áreas, portanto neste capítulo é feita umaexplanação de como o cérebro trabalha e as componentes de um sistema que utiliza BCI(aquisição de sinais, pré-processamento, classificação e aplicação) de uma forma um poucomais detalhada.
2.1 O cérebro e suas áreas
Todos os estímulos sensoriais e a ação realizada pelo corpo passa pelo Sistema Nervoso.A unidade básica do Sistema Nervoso é o neurônio que transmite a informação a outrosneurônios até chegar ao seu destino. Os impulsos neurais transmitidos pelos neurônios po-dem ter ação sobre partes do corpo, como glândulas e músculos, ou então para transmitirsensações para o cérebro. Esses impulsos transmitidos pelos neurônios são potenciais deação; impulsos eletroquímicos que são resultado do movimento de moléculas elétricamentecarregadas (íons) para dentro e para fora dos neurônios (ATKINSON, 2002).
O cérebro possui uma parte mais externa chamada córtex cerebral, que recebe in-formações sensoriais e transmite respostas motoras de partes do corpo. Cada uma dasinformações enviadas para o cérebro possui uma área específica. Para descrever melhoressas áreas específicas, é importante compreender que existem dois hemisférios cerebrais,o hemisfério direito e esquerdo, e que eles são basicamente simétricos com uma divisãoprofunda entre si. Cada hemisfério é divido em quatro lobos: lobo frontal, parietal, oc-cipital e temporal. O lobo frontal e o parietal são divididos pela fissura central, e o lobotemporal é delimitado pela fissura lateral. A divisão entre o lobo parietal e occipital nãoé tão definida, portanto o lobo occipital fica na parte de trás do cérebro, e o lobo parietalna parte de cima (ATKINSON, 2002). A Figura 2.1 mostra os lobos e suas divisões.
Cada área do córtex é responsável por uma função, por exemplo a área motora primáriae a área visual. A área motora primária é a área que controla os movimentos do corpo efica na frente da fissura central. A área responsável pela visão fica no lobo occipital e échamada de área visual primária. A Figura 2.2 mostra as regiões da área motora e visual,
15

CAPÍTULO 2. FUNDAMENTAÇÃO TEÓRICA 16
Figura 2.1: Lobos e fissuras do cerebro. Fonte: Introdução à Psicologia de Hilgard, 13 Edição, pag. 68.
entre outras. Quando existe estimulação elétrica nos pontos, existe uma ação direta nocorpo. Por exemplo pontos específicos do córtex motor que quando estimulados podemmexer o membro do ponto estimulado (ATKINSON, 2002).
Figura 2.2: Regiões do cérebro. Fonte: Introdução à Psicologia de Hilgard, 13 Edição, pag. 70.

CAPÍTULO 2. FUNDAMENTAÇÃO TEÓRICA 17
2.2 Aquisição de sinais
A aquisição da atividade cerebral pode ser feita por métodos invasivos ou não-invasivos.Métodos invasivos necessitam de cirurgia para colocação de sensores diretamente na su-perfície do córtex. Como existe contato direto dos eletrodos com o córtex, esse métodoobtém um sinal que não possui muitos ruídos. Porém possui um custo mais alto e comchances de problemas como biocompatibilidade dos eletrodos (BARBOSA, 2012; GAR-CIA, 2013). Métodos não-invasivos são mais comuns, não necessitando de cirurgias, poisobtêm a atividade cerebral através do couro cabeludo. O sinal proveniente desses métodosgeralmente são ruidosos, porém tem um custo menor e não corre riscos de saúde como nocaso dos métodos invasivos.
Para o projeto foi escolhido a eletroencefalografia (EEG), que é um método não-invasivo usado na maioria dos trabalhos. O EEG consiste em sensores colocados sobre ocouro cabeludo para medir o potencial elétrico médio de um conjunto de neurônios situadosno córtex (ATKINSON, 2002). Esse método possui um custo baixo se comparado a outrosmétodos, além de possuir portabilidade e precisão temporal (BARBOSA, 2012; SAMADI;DALIRI, 2014).
O EEG varia conforme o estado emocional da pessoa. Uma das mudanças mais visíveisé a mudança na frequência do sinal, pois existe uma relação entre as frequências e oestado cerebral da pessoa. A mudança na frequência é mais visível nos estágios de sono.Existem faixas de frequências básicas do EEG que são: Delta, Teta, Alfa, Beta e Gama(BARBOSA, 2012).
As faixas mais lentas são Delta (1 a 4 Hz) e Teta (4 a 8 Hz), e estão relacionadas aosono não-REM, e a faixa delta com o sono profundo. Alfa tem a faixa de 8 a 13 Hz eestá relacionada com o relaxamento e sonolência. Dentro da faixa alfa existe um ritmoconhecido como Mu, que pode variar entre 8 e 11 Hz. Está relacionada ao córtex motore possui uma característica deste que é a presença de uma fase rápida negativa e umapositiva mais lenta. (BARBOSA, 2012).
Por fim existem os ritmos de maior frequência e mais rápidos que são Beta (13 a 30 Hz)e Gama (acima dos 30 Hz). A presença dessas bandas é consequência de atividades moto-ras, tarefas cognitivas complexas e atividades que exigem alta concentração(BARBOSA,2012).
Uma característica dessas faixas de frequência é o fato de ritmos mais lentos terempotenciais mais elevados por conta de uma maior sincronização. Enquanto ritmos maisrápidos terem potenciais mais baixos por conta de uma baixa sincronização da atividadecerebral(BARBOSA, 2012).

CAPÍTULO 2. FUNDAMENTAÇÃO TEÓRICA 18
2.3 Pré-processamento
O pré-processamento prepara o sinal para facilitar o processo de classificação, dimi-nuindo a influência de ruídos e artefatos no sinal. O sinal que é obtido pode possuirmuitas interferências internas e externas, que podem ser tratadas por meio de filtros e/oumétodos estocásticos.
Interferências externas podem ser ruídos da rede elétrica, mal funcionamento ou pro-blemas com o equipamento, entre outros. Ruídos internos são resultados de atividadescerebrais diferentes das de interesse que afetam o sinal obtido na aquisição (SILVA, 2016).
2.4 Extração de características
Para usar a EEG como fonte de informação para uma BCI, são usados padrões dife-rentes no sinal de acordo com o processo fisiológico usado. Os padrões são usados paraextração de característica e classificação da BCI. A extração de característica procuraencontrar o padrão da atividade cerebral do usuário e faz parte do treinamento para ocontrole do BCI.
Dentre os padrões da atividade cerebral, podem ser citados o potencial visual evocado(VEP, do inglês visual evoked potentials), potencial cortical lento (SCP, do inglês slowcortical potential), P300 e ritmos Mu e beta (BARBOSA, 2012).
2.4.1 Visual Evoked Potential
O potencial visual evocado pode ser transitório (TVEP, do inglês transient visualevoked potentials) ou em estado de equilíbrio (SSVEP, do inglês steady state visual evokedpotentials). Os transitórios são gerados em resposta a estímulos visuais para estimar adireção do olhar da pessoa. Já o estado de equilíbrio é quando a frequência de estímulo émaior que 6 Hz, consistindo em um sinal periódico contendo as componentes harmônicasda frequência de estímulo (GENTILETTI, 2009). O VEP foi usado no trabalho de Vidalem que foi registrado o VEP da consequência de estímulos visuais com frequências distintas(VIDAL, 1973). A frequência do estímulo escolhido ficaria sincronizada com o EEG dapessoa determinando a direção do olhar (BARBOSA, 2012; WOLPAW, 2002).
2.4.2 Slow Cortical Potential
O SCP é um potencial de baixa frequência gerado no córtex cerebral com períodos deoscilação entre 0,5 s e 10,0 s. O SCP negativo é associado a movimentos e outras funçõesque envolvem ativação cortical. Por outro lado, o positivo é associado à ativação corticalreduzida (BARBOSA, 2012; WOLPAW, 2002). Muitos trabalhos demonstraram que é

CAPÍTULO 2. FUNDAMENTAÇÃO TEÓRICA 19
possível que uma pessoa consiga controlar seu SCP, porém é preciso um extensivo treina-mento (GENTILETTI, 2009). Apesar do treinamento e das lentas alterações limitaremo projeto, o SCP não depende de estímulos, aumentando o leque de aplicações, já que apessoa não precisa responder a estímulos (BARBOSA, 2012).
2.4.3 P300
O P300 tem relação com os potenciais relacionados a eventos (ERP, do inglês eventrelated potentials) com latências maiores que 100 ms (GENTILETTI, 2009). O P300 temseu nome por ser um potencial positivo que surge após 300 ms que acontece com estímulosque tem certo grau de novidade ou significância. A expectativa é um fator importante,pois o P300 se torna proeminente apenas nas repostas induzidas desejadas ou que são dealguma forma novidade. Tem a vantagem de não ser necessário treinamento, pois trata-sede uma resposta natural do cérebro, mas tem a desvantagem de depender da atençãovisual do usuário (BARBOSA, 2012; GENTILETTI, 2009; WOLPAW, 2002).
2.4.4 Ritmos Mu e Beta
Os ritmos Mu e Beta são influenciados por movimentos, sejam eles reais ou imaginários.Na presença de movimento ou da preparação do mesmo, a potência dos ritmos é reduzidapor uma dessincronização na atividade neuronal. Como a dessincronização é ligado aoevento, esse comportamento é chamado de ERD (do inglês event-related desynchroniza-tion). No fim do movimento executado, seguido por relaxamento, ocorre o inverso, ouseja, a sincronia da atividade neuronal gerando um aumento dos ritmos Mu e Beta, o qualé chamado ERS (do inglês, event related synchronization) (BARBOSA, 2012; WOLPAW,2002).
Esse padrão ERS também pode ser encontrado como tarefas mentais (MT, do inglêsmental tasks) que tem por base a classificação de padrões registrados pelo EEG espontâneodentro de diferentes tarefas, as quais também podem ser tarefas mentais não motorascomo tarefas matemáticas, de linguagem e musicais (BARBOSA, 2012; GENTILETTI,2009). O que mais chama a atenção desse padrão é a possibilidade de utilizar a imagéticamotora (simulação mental do movimento do membro sem ativação muscular) como fontede informação, pois pode ser usada a lateralização das funções cerebrais, a qual explica queo hemisfério direito do cérebro controla o lado esquerdo do corpo e o hemisfério esquerdocomanda o lado direito (BARBOSA, 2012).
2.5 Classificação
Após feito o treinamento com o usuário, obtêm-se dados com as características extraí-das. Esses dados servem para "alimentar"o classificador, afim de que ele possa utilizar os

CAPÍTULO 2. FUNDAMENTAÇÃO TEÓRICA 20
dados para encontrar as características no sinal EEG. O classificador analisa amostras dosinal para decidir a ação ou o comando a ser executado.
Para uma pessoa qualquer, reconhecer um padrão parece uma atividade trivial. Porémreconhecimento de padrões não é uma tarefa fácil para máquinas, mas existem algunsalgoritmos que geralmente são usados para esse fim. Um algoritmo muito usado para aclassificação é a máquina de vetor de suporte (SVM, do inglês Support Vector Machine).
2.5.1 Support Vector Machine
O SVM é uma técnica que utiliza funções lineares para distinguir classes, construindohiperplanos que maximizam as margens entre as classes. Por meio de dados obtidospor um conjunto de treinamento contendo as classes categorizadas, o SVM é capaz deatribuir uma das categorias para novos exemplos (SILVA, 2016). O funcionamento doSVM é mostrado na Figura 2.3.
Figura 2.3: Funcionamento do SVM e seu hiperplano.
Apesar do SVM utilizar funções lineares, são raros os casos linearmente separáveis.Portanto para casos não-lineares mapeiam-se os dados de entrada para um espaço comalta dimensionalidade para que seja possível a separação linear dos conjuntos. A funçãoresponsável por essa separação é denominada kernal (SILVA, 2016).
O SVM foi inicialmente projetado para problemas binários, ou seja, para problemascom duas classes. Porém existem duas variações para dar suporte a múltiplas classes,sendo elas a one-versus-rest e a one-versus-one (SILVA, 2016).

CAPÍTULO 2. FUNDAMENTAÇÃO TEÓRICA 21
No caso do one-versus-rest constrói-se um número N de classificadores para um pro-blema com o mesmo número N de classes. É feito um classificador que difere uma dasclasses de todas as outras, por isso são necessários N classificadores. A segunda variação, aone-versus-one, cria um classificador binário entre todas as classes, resultando em númeroNxN de classificadores (SILVA, 2016).
2.6 Aplicações
A aplicação de uma BCI envolve a ação do sistema, sendo a finalidade da criação dosistema. No trabalho (GEORGE, 2014) é possível ver um sistema com BCI que controlauma luva para movimentar a mão, o qual pode ser usado para a reabilitação do membro.O trabalho (JANG; LEE; LEE, 2014) desenvolveu um sistema para controle de um robôusando movimentos como piscar os olhos e o movimento do pescoço, com enfoque naaplicação de auxílio para pessoas com dificuldades motoras.
Para a mobilidade, muitas pesquisas se concentraram em controlar cadeiras de rodas.No trabalho (GENTILETTI, 2009) foi criado um ambiente virtual para simulação domovimento da cadeira de rodas, evitando assim perigos de uma aplicação física comobatidas ou lesões. O trabalho usou o padrão P300 para controlar a cadeira. Uma telamostra as opções de movimento do cadeira, entre outras opções, e através da visão dousuário, era possível encontrar qual opção era a escolhida. Outro monitor mostrava ocaminho que a cadeira fazia. Duas pessoas saudáveis fizeram testes com o sistema econseguiram dirigir a cadeira de rodas virtual de forma adequada.
Já em (DIEZ, 2012), uma cadeira de rodas real é controlada, usando o padrão SSVEP,usando um estímulo visual em cada comando. Ao usuário olhar o comando pretendido,o estímulo afeta o comportamento das ondas cerebrais fazendo com que a cadeira andepara a direção escolhida pelo usário. Quinze pessoas participaram dos testes e trezedos voluntários conseguiram controlar a cadeira. O padrão escolhido causou um certodesconforto pelos estímulos luminosos.
No trabalho (LEEB, 2007) a cadeira de rodas é controlada por um usuário usandoa imaginação dos movimentos dos pés. A imaginação do movimento dos pés geravaoscilações do ritmo Beta no EEG. Nesse trabalho, foi simulado um ambiente virtual noqual o usuário deveria dirigir a cadeira até avatares do ambiente. O trabalho envolveuum tetraplégico, que foi capaz de controlar a cadeira de rodas no ambiente virtual.
Em (LOPES; PIRES; NUNES, 2012) foi desenvolvida uma cadeira de rodas com umsistema de navegação de apoio, que consiste em um sistema semicontrolado, ou seja,é necessário o usuário e a máquina para o controle. A cadeira possui um sistema denavegação que determina as rotas por meio das escolhas do usuário. As opções estãopresentes em um monitor, e o sistema utiliza o padrão P300 para identificar a escolha.São necessários comandos de baixo nível apenas quando há mudanças no cenário ou

CAPÍTULO 2. FUNDAMENTAÇÃO TEÓRICA 22
quando é necessária a tomada de decisão, aliviando o estresse. Os comandos envolvema concentração do usuário. Onze voluntários participaram dos testes, sendo um dosvoluntários com deficiência motora. Todos foram capazes de controlar a cadeira.
No trabalho (REBSAMEN, 2007) é feito algo semelhante ao trabalho (LOPES; PIRES;NUNES, 2012), porém para lugares internos, como em um quarto. É mostrada ao usuáriouma tela com opções de lugares para ir, por exemplo, a cama, o escritório, banheiro, entreoutras opções. Pela opção escolhida, o sistema da própria cadeira o guia para determinadolugar. O sistema também utiliza o padrão P300 para escolha dos lugares.
Em (MILLÁN, 2009) existe um sistema de controle compartilhado, porém, o usuáriocomanda a cadeira de rodas em todo tempo e o sistema apenas corrige erros de inter-pretação e caminho. O sistema é controlado com a imaginação do movimento da mãoesquerda, associação de palavras e relaxamento. Foi testado em uma cadeira de rodas realem um ambiente com obstáculos. Três pessoas fizeram os testes e todos os três tiveramum certo grau de controle sobre a cadeira de rodas.
Para o presente trabalho, será feito um sistema de controle para um protótipo decadeira de rodas, que usará o EEG para obtenção dos dados através do Emotiv Epoc. Nãofoi escolhido um padrão para classificar, pois o trabalho foi mais focado em desenvolver osistema.

Capítulo 3
Emotiv Epoc
Na década de 70, marcada pelo trabalho pioneiro de Vidal (VIDAL, 1973), a faltade equipamentos ou o custo alto limitavam aplicações para BCI. Porém com o tempo,softwares e hardwares, além de novos conhecimentos sobre a atividade cerebral possibi-litaram o desenvolvimento e a pesquisa na área da BCI (WOLPAW, 2002). Dentre asnovas tecnologias, têm-se os capacetes que trabalham com EEG.
Para o desenvolvimento deste trabalho foi escolhido o Emotiv Epoc que conta com 14sensores para leitura dos sinais e possui uma ótima portabilidade por usar comunicaçãosem fio para a base de processamento. A Figura 3.1 mostra o capacete, um componenteUSB (Universal Serial Bus) que recebe os sinais mandados e os sensores que são acopladosnos slots do capacete.
Figura 3.1: Capacete Emotiv Epoc.
Para a utilização é preciso molhar os feltros junto aos sensores com uma solução salinaque facilita a obtenção da atividade cerebral de neurônios. Os sensores captam a atividadede vários neurônios juntos em cada ponto dos sensores.
A localização dos sensores pode ser dada pelo sistema internacional 10-20 e o nome decada ponto é mostrado na Figura 3.2. O sistema internacional 10-20 é um padrão esta-belecido pela federação internacional de eletroencefalografia e neurofisiologia clínica que
23

CAPÍTULO 3. EMOTIV EPOC 24
determina eletrodos com números pares no hemisfério direito do cérebro e os números ím-pares no hemisfério esquerdo. As letras são colocadas de acordo com as áreas anatômicas,sendo o significado de F frontal, C central, P parietal e O occipital (FARIA, 2014).
Figura 3.2: Sistema Internacional 10-20.
3.1 Emotiv Xavier Control Panel
O capacete possui o software chamado Emotiv Xavier Control Panel que auxilia nautilização e apresenta aplicações para usar o capacete, tais como qualidade do sinal,detecção de expressão facial, verificação de estado emocional, entre outras.
A página inicial do software tem a finalidade de mostrar a qualidade do sinal de cadaum dos sensores do capacete por meio de cores. Segundo a demonstração do software,o melhor caso seria a cor verde e o pior caso a cor vermelha. A Figura 3.3 mostra atela inicial do software e as cores indicativas em cada eletrodo. Caso não exista sinal nocapacete, o círculo do eletrodo em questão ficaria com a cor preta.
Na parte de detecções do software temos: Mental Commands, Facial Expressions,Performance Metrics e Inertial Sensors.
A área do Facial Expressions procura detectar expressões faciais do usuário e faz comque um avatar faça as mesmas expressões do usuário. A Figura 3.4 mostra a janela da

CAPÍTULO 3. EMOTIV EPOC 25
Figura 3.3: Tela do software Emotiv Xavier Control Panel inicial demonstrando a quali-dade de cada um dos eletrodos.
aplicação. Existem alguns controles ao lado direito para controlar a sensibilidade de cadauma das ações de expressão.
Figura 3.4: Tela da aplicação Facial Expressions do software Emotiv Xavier ControlPanel.

CAPÍTULO 3. EMOTIV EPOC 26
Performance Metrics analisa a atividade cerebral com o intuito de detectar estadosmentais como frustação, engajamento, foco e meditação. A aplicação fabrica um gráficocom a variação de cada sensação. A Figura 3.5 mostra a janela da aplicação.
Figura 3.5: Tela da aplicação Performance Metrics do software Emotiv Xavier ControlPanel.
A aplicação Inertial sensors tem por objetivo usar o mouse do computador por meiodo movimento da cabeça. O Emotiv Epoc possui sensores para identificar rotação docapacete, portanto, o mouse responderá relativamente ao movimento da cabeça do usuário.A janela da aplicação é mostrada na Figura 3.6.
Uma das aplicações mais interessantes é o Mental Commands, que permite o controlede um objeto virtual através da atividade cerebral do usuário. Essa aplicação associapadrões cerebrais com comandos para mover um cubo virtual. É registrado um treinodurante alguns segundos e, por meio do comportamento nesse tempo, são extraídas ascaracterísticas da atividade cerebral. Conforme o programa as classifica por meio dascaracterísticas o cubo pode se mover. Quanto mais comandos, mais difícil se torna ocontrole do cubo. A Figura 3.7 mostra a janela da aplicação e o display do cubo.
Apesar de todas as funcionalidades, foi utilizado apenas a aplicaçãoMental Commandsno trabalho, com o intuito de extrair e classificar os dados e treinar os usuários.

CAPÍTULO 3. EMOTIV EPOC 27
Figura 3.6: Tela da aplicação Inertial Sensors do software Emotiv Xavier Control Panel.
Figura 3.7: Tela da aplicação Mental Commands do software Emotiv Xavier ControlPanel.
3.2 Aplicações com Emotiv Epoc
Muitos pesquisadores usaram o Emotiv Epoc em suas pesquisas para vários fins. Todasas pesquisas mencionadas a seguir utilizam o Emotiv Epoc para a aquisição de sinais.

CAPÍTULO 3. EMOTIV EPOC 28
No trabalho (SAMADI; DALIRI, 2014), o autor usa o Emotiv Epoc para controlarum robô LEGO Mindstorms NXT 2.0 para resolver um cubo mágico. O controle é feitopensando no movimento de rotação do cubo. No trabalho (GARCIA, 2013) o autorcontrola um robô industrial, por meio de expressões faciais e as ações de um cubo virtual3D. O trabalho (JANG; LEE; LEE, 2014) permite o controle de um robô auxiliador parapessoas que não têm o movimento dos membros. Esse robô é controlado pelo movimentodo pescoço e por piscadas dos olhos.
O trabalho (GEORGE, 2014) tem por objetivo um sistema de assistência para reabi-litação do movimento das mãos. O trabalho usa o Emotiv Epoc e um Arduino que ativaum motor que é ligado a uma espécie de luva mecânica.
No trabalho (DKHIL, 2015) é feito um sistema de segurança para carros. O trabalhousa uma câmera inteligente para captar a face e supervisiona o ato de piscar do motorista.Também é utilizado o Emotiv Epoc para para verificar o sinal EEG do motorista.
Os trabalhos (FARIA, 2014) e (KAWALA-JANIK, 2015) controlam softwares por BCIutilizando Emotiv Epoc. O trabalho (FARIA, 2014) criou um jogo tipo Pong e umreprodutor de música controlados pela BCI. O trabalho (KAWALA-JANIK, 2015) já foicomentado na Seção 2.6.

Capítulo 4
Sistema Desenvolvido
A ideia parte de montar o modelo prático para provar o conceito de um sistema queutiliza BCI. Para o sistema é necessário a aquisição dos sinais, o pré processamento, aclassficação, e a partir da classificação mandar comandos para uma cadeira de rodas.
O sistema foi desenvolvido utilizando o Emotiv Epoc para adquirir a atividade cerebral.Também foi utilizado a aplicação Mental Commands do software Emotiv Xavier ControlPanel que é capaz de classificar os sinais e também pode realizar o treinamento. Aclassificação é feita pelo software que movimenta o objeto virtual da aplicação conformeo comando detectado.
Usando o movimento do objeto virtual encontrado no Mental Commands, foi feito umprograma em Python com o objetivo de detectar o movimento e enviar o comando parao microcontrolador. Para rodar os programas foi utilizado um Laptop ASUS K46CB comprocessador Intel Core i5 e 6 Gb de memória RAM.
A comunicação entre o Python e o microcontrolador foi feita por meio de comunicaçãoBluetooth, vide Seção 4.2. O microcontrolador por sua vez, recebe o comando aciona assaídas para controlar os motores do protótipo da cadeira. O microcontrolador escolhidopara o projeto foi o ATmega328 da placa Arduino Uno, que possui um baixo custo e podefacilmente controlar os motores do protótipo.
A Figura 4.1 mostra uma mapa conceitual com explicações sobre cada parte do sistemae como elas se conectam.
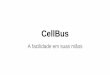
O protótipo da cadeira de rodas usado, foi desenvolvido por um aluno da FT mostradono trabalho (NAGHADA, 2015). O protótipo é mostrado na Figura 4.2.
A cadeira possui dois motores DC, os quais são ativados de maneira diferente, paracada movimento. Foi nomeado motor A, o motor que está ao lado direito da cadeira, emotor B, o motor ao lado esquerdo. Para o movimento da frente, são ativados os doismotores em um único sentido. No movimento para trás são ativados os dois motores nosentido contrário. O movimento da direita é ativado o motor B, e para o movimento daesquerda é acionado o motor A. A Figura 4.3 exemplifica os movimentos da cadeira.
29

CAPÍTULO 4. SISTEMA DESENVOLVIDO 30
Figura 4.1: Mapa conceitual do sistema.
Figura 4.2: Protótipo da cadeira de rodas.
Neste trabalho optou-se por desenvolver um sistema de controle em um protótipode cadeira de rodas por três motivos. Primeiramente é possível validar o sistema em umprotótipo, segundo por razão de custo e terceiro pela segurança. A utilização do protótipoevita a chance de acidentes com o usuário.
As seguintes seções explicam como funciona cada parte desenvolvida do sistema.

CAPÍTULO 4. SISTEMA DESENVOLVIDO 31
Figura 4.3: Movimentos da cadeira e acionamento dos motores.
4.1 Python
Como foi decidido usar a ferramenta Mental Commands, era necessário que fosse feitoalgum programa que pudesse ler os movimentos do objeto virtual que indica o movimentoclassificado. Foi escolhido usar a linguagem Python para desenvolver o programa, pois jápossui bibliotecas para trabalhar com imagens e é uma linguagem de fácil acesso.
O programa feito faz uma varredura na imagem a cada 100 ms. As varreduras feitasnos eixos x e y acham o local do objeto e enviam um sinal de comando para o microcontro-lador através de uma comunicação Bluetooth. A varredura analisa os pixels da imagem,passando em ordem crescente as coordenadas de cada pixel da imagem. A ordem do mapade pixels segue da esquerda para a direita e de cima para baixo. A análise feita diferenciaa cor do fundo das cores do objeto. As variáveis PX e PY assumem o valor do últimoponto encontrado durante a varredura, como mostrado na Figura 4.4.
O programa converte o mapa de pixels para um plano cartesiano e é feita uma correçãopara conseguir a coordenada do ponto central do objeto.
Para verificar a direção certa do objeto, foi preciso comparar qual dos dois pontostinha maior valor em módulo. Caso o módulo de PX seja maior que o módulo de PY, oobjeto se encontra no eixo X. Se PX for menor que zero, o objeto está à esquerda. Se PXfor maior que zero, o objeto está à direita. Caso o módulo de PY seja maior que o módulode PX, o objeto se encontra no eixo Y. Se PY for menor que 0, o objeto está abaixo. Se

CAPÍTULO 4. SISTEMA DESENVOLVIDO 32
Figura 4.4: Varredura de imagem feita pelo programa em Python.
PY for maior que 0, o objeto está acima. Também foi estabelecido um limite mínimo domovimento do objeto para ser considerado um comando. Após a verificação, é enviado ocomando conforme o movimento do objeto.
A Figura 4.5 mostra um fluxograma do programa feito em Python.
4.2 Bluetooth
Foi preciso comunicar o programa feito em Python com o programa feito para o Ar-duino. A comunicação foi feita usando o bluetooth do Laptop que executava os programasMental Commands e o programa em Python e um módulo HC05 GW-040 ligado ao Ar-duino, como mostrado na Figura 4.6. O módulo bluetooth tinha apenas a função derepassar o código recebido do programa Python para o Arduino.
O módulo possui 6 pinos: EN, VCC, GND, TXD, RXD, STATE. Os pinos VCC eGND são usados para alimentar o módulo. O pino EN quando deixado em um estadobaixo, ou seja, ligado ao GND, desabilita os módulos. Os pinos TXD e RXD servem paracomunicação. O pino TXD transmite os dados e o pino RXD tem como função receberos dados. O pino STATE indica se a conexão foi feita com sucesso tendo um nível altono pino.
Existe um botão no módulo que é usado para mudar o modo de trabalho. Os modosde trabalho são AT e BT. O modo BT faz com que o módulo trabalhe normalmente parareceber e transmitir dados. O modo AT tem como objetivo configurar o módulo de acordocom as preferências do usuário. Por exemplo, caso o usuário queira mudar o nome ou ocódigo para pareamento do dispositivo, é necessário entrar em modo AT para configurar

CAPÍTULO 4. SISTEMA DESENVOLVIDO 33
Figura 4.5: Fluxograma do programa feito em Python.
o módulo e trocar os campos requeridos. A Figura 4.7 mostra o módulo, os pinos e obotão para mudar o modo de trabalho.

CAPÍTULO 4. SISTEMA DESENVOLVIDO 34
Figura 4.6: Esquema da comunicação Bluetooth.
Figura 4.7: Foto do módulo Bluetooth HC05 GW-040 usado, os pinos e o botão paramudar o modo de trabalho.
4.3 Arduino e o circuito para os motores
Foi feito um programa com o Arduino que ao receber o comando enviado pelo programaem Python através da comunicação Bluetooth, executa um movimento. O Arduino foiligado a uma ponte H que é usada para controlar motores de corrente contínua.

CAPÍTULO 4. SISTEMA DESENVOLVIDO 35
O programa verifica o comando enviado pelo Bluetooth, e a cada comando específicoé necessário ativar as portas do microcontrolador de forma que controle o sentido e quaismotores serão ativados.
Os dois motores (motor A e B) se ligam a portas específicas do Arduino para seremativados. Para controlar o sentido da rotação dos motores é necessário inverter os polosda alimentação do motor, o que é feito pela ponte H através de quatro contatos que sefecham, invertendo o caminho que a corrente elétrica percorre. Portanto, para controlar osentido do motor foram necessárias outras duas portas para cada motor, nomeadas comoA1 e A2 para o motor A, e B1 e B2 para o motor B. A Figura 4.8 mostra a ligação daponte H e seu funcionamento.
Figura 4.8: a)Esquemático dos motores MA e MB. b)Funcionamento da ponte quandoacionada a porta 1 ou a 2.
Sendo assim, é necessário ativar A1 e B1 quando o comando é para que o protótipoavance, ou seja, movimente para a frente, e A2 e B2 para o comando que o protótiporetrocede, ou seja, movimento para trás. Para o caso de uma curva, o protótipo foiprojetado que a cadeira pudesse apenas girar ligando apenas um dos motores, e após issoa cadeira avançasse ou retrocedesse. A Figura 4.3 já mostrada exemplifica o movimento dacadeira. Ajustando o ângulo para onde o usuário desejar ir, é necessário apenas seguir emfrente. O foco está em testar os quatro movimentos feitos e a dificuldade para controlá-los.
A Figura 4.9 mostra um fluxograma do programa feito para o Arduino. O fluxogramatambém mostra as portas acionadas para cada um dos movimentos.

CAPÍTULO 4. SISTEMA DESENVOLVIDO 36
Figura 4.9: Fluxograma do programa feito para o Arduino

Capítulo 5
Metodologia
O principal objetivo do trabalho é o desenvolvimento do sistema para que seja possívelo controle do protótipo por meio da EEG. Como parte do caminho para chegar até ocontrole do sistema desenvolvido, é possível dizer que cada parte do sistema faz o papelde uma parte da BCI. São eles:
• O capacete Emotiv Epoc é responsavel pela aquisição dos sinais.
• O software Mental Command faz o papel do pré-processamento e do classificador.
• O programa em Python identifica a classificação do software e transforma em co-mandos para enviar pelo Bluetooth.
• O módulo Bluetooth tem por função apenas a comunicação para levar os comandospara o microcontrolador.
• O microcontrolador é a aplicação, responsável por controlar o protótipo da cadeirade rodas.
A Figura 5.1 mostra a sequência das partes citadas acima.Uma prova de conceito utiliza um modelo prático para comprovar o conceito teórico.
Portanto para provar o conceito de que é possível controlar a cadeira de rodas através deum sistema que utiliza BCI foi construído o modelo prático como mostrado acima.
Após completo o modelo prático, foi realizado testes para verificar a resposta do sis-tema através de imagens e dois testes com voluntários para ver a possibilidade e a facili-dade do controle.
Para um dos treinamentos, cada movimento é associado a sentimentos bons (comoandar de bicicleta ou tocar algum instrumento) e ruins (como comidas ou experiênciasque o voluntário não goste). Para o outro treinamento cada movimento é associado aomovimento das mãos.
37

CAPÍTULO 5. METODOLOGIA 38
Figura 5.1: Esquemático do projeto final.

Capítulo 6
Resultados e Discussões
6.1 Movimentos da cadeira
Para testar como a cadeira responde a cada um dos movimentos foram usadas imagenspré-feitas para alimentar o programa em Python, com movimentos para todos os ladose com diferentes intensidades para mover a cadeira. O protótipo se moveu conforme asimagens passavam, como era esperado do sistema.
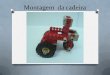
Para outro teste mecânico, foi feita uma sequência de imagens para testar o protótipopor um trajeto dentro do próprio Laboratório de Sistemas Embarcados. As imagensestavam atribuídas a comandos do computador para que pudesse ser controlado peloteclado. A Figura 6.1 mostra uma foto da movimentação do protótipo durante o teste.
O programa em Python feito respondeu bem a todos os testes. Os comandos acionadospelo Arduino funcionaram bem de modo que foi possível controlar a cadeira para fazer atrajetória pelo laboratório. A trajetória foi feita sem dificuldades, validando a parte doPython e Arduino do sistema.
6.2 Dificuldade do controle
Obter um resultado pela classificação não foi possível por ser usado o Emotiv Xa-vier Control Panel como sistema de classificação. Portanto, observou-se a dificuldade decontrolar o objeto do software. Foi feito um treinamento para controlar um movimentoapenas. Caso fosse possível controlar, aumentaria mais um movimento a cada etapa.
Duas pessoas se voluntariaram para participar do treinamento e tentar controlar oprotótipo. O voluntário associado aos sentimentos teve um bom resultado quando foitrabalhado apenas um movimento. Quando foi passado a dois, não foi possível controlartotalmente a cadeira. Foram treinados o movimento para frente e para a direita, e pediu-se que o voluntário fizesse um percurso em torno do laboratório, porém não foi possívelfazer o caminho inteiro pela dificuldade encontrada em controlar dos dois movimentos.
39

CAPÍTULO 6. RESULTADOS E DISCUSSÕES 40
Figura 6.1: Foto sequencial do protótipo no teste do trajeto.
O segundo voluntário teve um bom resultado ao controlar com a imaginação do movi-mento das mãos, porém foi um teste diferente onde ele devia apenas girar a cadeira paraa direita ou para a esquerda. Foi conseguido o controle até dois movimentos, pois paraum terceiro movimento teria de ter o movimento de outro membro.
Os resultados eram totalmente práticos, e nos dois casos, foi possível somente controlaraté 2 movimentos. A dificuldade aumenta muito a cada movimento que é adicionado, poisé preciso ter um sinal claramente diferente de outro para classificar.
Não foi possível realizar muitos testes para melhorar o controle dos voluntários, poistivemos problemas com o capacete.
6.3 Sistema em Geral
É possível controlar o protótipo da cadeira de rodas através da aplicação Mental Com-mands. Porém, é necessário muito treinamento para que o usuário consiga dominar o usoda aplicação. Tendo o domínio do uso da aplicação, o sistema Python-Arduino faz comsucesso o papel de classificar o movimento do objeto virtual realizado e acionar os motoresda cadeira.
É uma alternativa para a motivação apresentada no trabalho, pois propõe um sis-tema que pode ser controlado apenas pela atividade cerebral. A utilização do protótipo

CAPÍTULO 6. RESULTADOS E DISCUSSÕES 41
demonstra e simula o uso do sistema em uma cadeira real e propõe uma forma para alocomoção para o usuário com dificuldades motoras.
Os custos mais altos do sistema são o valor do Emotiv Epoc que está em torno de U$300, além do valor do laptop. Porém, o laptop trabalha como um computador ou laptopque o usuário pode já possuir. Os custos do circuito da ponte H, motores e do Arduinoestão abaixo de R$ 150,00. Contudo, a mudança para uma cadeira de rodas elevaria opreço do sistema final.
O trabalho foi planejado de modo que o sistema não utilizasse estímulos visuais paraevitar necessitar de monitores para controlar o protótipo, ou mesmo para o caso do con-trole de uma cadeira de rodas. Os estímulos visuais dependem do foco no monitor e istopoderia atrapalhar para controlar livremente a cadeira. E diferente de outros sistemas,utilizando a aplicação Mental Commands é possível treinar o usuário de modos diferentescomo o caso de sensações, ou tentando utilizar a imagética motora. Isto torna o treina-mento quanto ao padrão mais flexível e possibilidade da preferência de como controlarpor parte do usuário.
O sistema em geral demonstra um protótipo para um sistema com uma cadeira derodas e que pode se tornar um possível produto. O produto pode ser melhor trabalhadoe testado com diferentes possibilidades para obter um custo reduzido e com software ehardware aberto.

Capítulo 7
Conclusões
Um sistema utilizando BCI é de grande importância para pessoas que de algum modoperderam os movimentos do corpo ou membros. Portanto, o desenvolvimento feito aqui,embora não feito extatamente em uma cadeira de rodas, demonstra que é possível desen-volver hardwares e veículos de locomoção que podem ser usadas pelas pessoas que sofremcom tal limitação.
O desenvolvimento de uma BCI depende de muitos conhecimentos como neurologia,eletrônica, programação, circuitos microcontrolados e eletroencefalografia. Foi feito umestudo em muitos trabalhos e artigos e foi possível ter uma idéia do desenvolvimento decada parte do sistema.
Houve dificuldades para ter acesso aos dados da atividade cerebral do Emotiv Epoc,pois era necessário ter o kit de desenvolvimento, o SDK (Software Development Kit)Research Edition. Infelizmente não foi possível adquirir o kit e desenvolver um sistemade classificação.
No entanto, é possível utilizar o Emotiv Xavier Control Panel como um sistema declassificação e treino para um usuário utilizar o sistema. Foi preciso fazer o programaem Python para detectar a classificação do software através da imagem do movimento doobjeto virtual e se comunicar com o microcontrolador.
A comunicação entre Python e microcontrolador feita por Bluetooth oferece liberdadepara o protótipo rodar sem estar ligado fisicamente por meio de cabos. O microcontroladorArduino se tornou uma alternativa para receber os dados do módulo Bluetooth usado e ocircuito com uma ponte H para controlar a direção em que o carrinho deveria percorrer;
O trabalho passou por grandes dificuldades como atraso na entrega do Emotiv Epoc,a falta de acesso aos dados, dificuldades com o hardware e corrosão dos sensores pelasolução salina, entre outros. Porém, os testes com o sistema montado com o protótipo, oprograma Emotiv Xavier Control Panel e a programação em Python e Arduino, mostramque o sistema mecânico funciona.
42

CAPÍTULO 7. CONCLUSÕES 43
O controle de uma BCI depende de muito treinamento, então não foi possível treinartempo suficiente para o controle de quatro movimentos. Além da dificuldade de aprender acontrolar, houve problemas com o capacete, o que prejudicou os testes com os voluntários.
Portanto, para que seja possível controlar a cadeira, seria preciso dominar os movi-mentos do objeto através do capacete. Caso a pessoa consiga controlar o objeto virtualdo software Emotiv Xavier Control Panel, ela seria capaz de controlar a cadeira.
O objetivos do trabalho é ter uma BCI, visando o EEG como entrada e a movimentaçãoda cadeira como saída. Tivemos sucesso em criar um sistema em que fosse possívelcomunicar a entrada de dados do capacete através do Emotiv Xavier Control Panel atéa comunicação entre o Python e o Arduino. Portanto é possível movimentar a cadeiraatravés deste, sendo necessário somente o treinamento do usuário e um possível domínioda aplicação Mental Commands para controlar a cadeira de rodas adequadamente.
7.1 Trabalhos Futuros
Este projeto foi um trabalho pioneiro nesta linha de pesquisa na FT, e será aindatrabalhado por outros alunos. Possui potencial para trabalhos futuros e se torna umanova área que pode ser aproveitada dentro do Laboratório de Sistemas Embarcados. Paraos trabalhos futuros podem ser desenvolvido sistemas que utilizam a interface de umaforma mais completa. Trabalhos que podem ser feitos são:
• Testes com voluntários usando o protótipo deste projeto, com o objetivo de conseguiro controle dos quatro movimentos.
• Desenvolvimento de um capacete com custos mais baixos e o processamento do sinalobtido.
• Desenvolvimento de um sistema que utiliza aprendizado de máquina para extraçãode características e classificação, como o caso do SVM.
• Desenvolvimento de um sistema focando a aplicação para uma cadeira de rodas, comtreinamento para os quatro movimentos. Caso utilizado um padrão para imagéticamotora, criar uma metodologia para auxílio ao treino como no trabalho (HWANG;KWON; IM, 2009).

Referências Bibliográficas
ATKINSON, R. L. e. a. Introdução à Psicologia de Hilgard. 13. ed. [S.l.]: Artmed EditoraS.A., 2002. 792 p. ISBN 85-7307-913-4.
BARBOSA, A. F. Um sistema inteligente de classificação de sinais de EEG paraInterface Cérebro-Computador. [S.l.], 2012.
DIEZ, P. F. e. a. Commanding a robotic wheelchair with a high-frequencysteady-state visual evoked potential based brain-computer interface. In: MedicalEngineering & Physics Volume 35. ELSEVIER, 2012. p. 1155–1164. Disponível em:<http://www.sciencedirect.com/science/article/pii/S1350453312003335>.
DKHIL, M. B. e. a. A new approach for a safe car assistance system. In: 4a IEEEInternational Conference of Adcanced Logistics and Transport. IEEE, 2015. p. 217–222.ISBN 978-1-4799-8400-8. Disponível em: <http://ieeexplore.ieee.org/document/7136627/>.
FARIA, T. J. F. d. S. Interfaces Cérebro-Computador – Utilização do Emotiv EPOCpara controlar software lúdico. [S.l.], 2014.
GARCIA, A. P. e. a. EEG control of an industrial robot manipulator. In: 4th IEEEInternational Conference of Cognitve Infocommunications. IEEE, 2013. p. 39–44. ISBN978-1-4799-1546-0. Disponível em: <http://ieeexplore.ieee.org/document/6719280/>.
GENTILETTI, G. G. e. a. Command of Simulated wheelchair on a virtualenvironment using a brain-computer interface. In: IRBM Volume 30. ELSEVIER,2009. p. 218–285. Disponível em: <http://www.sciencedirect.com/science/article/pii/S1959031809001122>.
GEORGE, K. e. a. EEG control of an industrial robot manipulator. In: InternationalInstrumentation and Measurement Technology Conference. IEEE, 2014. p. 1326–1328.ISBN 978-1-4673-6386-0. Disponível em: <http://ieeexplore.ieee.org/document/6860961/>.
HWANG, H.-J.; KWON, K.; IM, C.-H. Neurofeedback-based motor imagery trainingfor brain-computer interface (BCI). In: Journal of Neuroscience Methods. ELSEVIER,2009. p. 150–156. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0165027009000454>.
JANG, W.; LEE, S.; LEE, D. Development BCI for Individuals with SeverelyDisability using EMOTIV EEG Headset and Robot. In: International Winter Workshopon. South Korea: IEEE, 2014. p. 1–3. ISBN 978-1-4799-2588-9. Disponível em:<http://ieeexplore.ieee.org/document/6860961/>.
44

REFERÊNCIAS BIBLIOGRÁFICAS 45
KAWALA-JANIK, A. e. a. Game Controller Based On Biomedical Signals. In: 4aIEEE International Conference of Adcanced Logistics and Transport. IEEE, 2015.p. 934–939. ISBN 978-1-4799-8701-6. Disponível em: <http://ieeexplore.ieee.org/document/7284003/>.
LEEB, R. e. a. Self-Paced (Asynchronous) BCI Control of a Wheelchair in VirtualEnvironments: A Case Study with a Tetraplegic. In: Computational Intelligence andNeuroscience. [S.l.]: Hindawi Publishing Corporation, 2007.
LOPES, A. C.; PIRES, G.; NUNES, U. Assisted navigation for a brain-actuatedintelligent wheelchair. In: Robotics and Autonomous Systems Volume 61. ELSEVIER,2012. p. 245–258. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0921889012002072>.
MILLÁN, J. d. R. e. a. Asynchronous Non-Invasive Brain-Actuated Control of anIntelligent Whellchair. In: Annual International Conference of the IEEE Engineeringin Medicine and Biology Society. IEEE, 2009. p. 3361–3364. ISBN 978-1-4244-3296-7.Disponível em: <http://ieeexplore.ieee.org/document/5332828/>.
NAGHADA, S. C. Desenvolvimento de um Sistema Eletrônico para Controle de umProtótipo de uma Cadeira de Rodas. Limeira, 2015.
REBSAMEN, B. e. a. Controlling a Wheelchair Indoors Using Thought. In: IEEEIntelligent Systems Volume 22. IEEE, 2007. p. 18–24. ISBN 1541-1672. Disponível em:<http://ieeexplore.ieee.org/document/4136854/>.
SAMADI, H.; DALIRI, M. R. Solve the Rubik’s Cube with Robot Based onNon-Invasive Brains Computer Interfaces. IEEE, p. 1–5, feb 2014. Disponível em:<http://ieeexplore.ieee.org/document/6802558/>.
SILVA, W. M. d. Revisão e comparação de classificadores em um experimento utilizandointerface cérebro-computador. Campo Mourão, 2016.
VIDAL, J. J. Toward direct brain-computer communication. In: Annual Review ofBiophysics and bioengineering. [S.l.: s.n.], 1973. p. 157–180.
WOLPAW, J. R. e. a. Brain-computer interfaces for communication and control.In: Annual International Conference of the IEEE Engineering in Medicineand Biology Society. ELSEVIER, 2002. p. 767–791. Disponível em: <http://www.sciencedirect.com/science/article/pii/S1388245702000573>.