Embed Size (px)
Citation preview

Pedro Mário Cruz e Silva
Visualização Volumétrica de Horizontes em Dados Sísmicos 3D
Tese de Doutorado
Tese apresentada como requisito parcial para obtenção do título de Doutor pelo Programa de Pós-Graduação em Informática da PUC-Rio.
Orientadores: Marcelo Gattass Paulo Cezar Carvalho
Rio de Janeiro, junho de 2004
Todos os direitos reservados. É proibida a reprodução total ou parcial do trabalho sem autorização da universidade, do autor e do orientador.
Pedro Mário Cruz e Silva Pedro Mário Cruz e Silva graduou-se bacharel em matemática na UFPE (Universidade Federal de Pernambuco) em 1995. Concluiu o mestrado em matemática também na UFPE em 1998. Participa de projetos de pesquisa no Tecgraf/PUC-Rio (Laboratório de computação gráfica) desde 2000. Atualmente participa do desenvolvimento de um sistema de visualização de dados sísmicos realizado em parceria com a gerência de Tecnologia em Geofísica da Petrobras.
Ficha Catalográfica
Silva, Pedro Mário Cruz
Descrição.
Inf. Técnicas
Natureza.
Incluí referências bibliográficas.
Visualização volumétrica; Dados sísmicos 3D; Rastreamento de Horizontes; Orientação local; Atributos Sísmicos Instantâneos.

À minha família.

Agradecimentos
Primeiramente a Deus pelo caminho que me foi reservado até aqui.
Aos meus pais Mário e Maria da Saúde pela educação recebida, pelo
carinho, pelos cuidados e pelo amparo de sempre. Ao meu irmão Mário Sérgio,
tios, primos e toda minha família pelo ótimo ambiente no qual cresci e vivo até
hoje.
À minha futura esposa Patrícia agradecimentos mais que especiais pelo
incentivo, carinho, compreensão, apoio e companheirismo.
Ao meu orientador Professor Marcelo Gattass por toda confiança
depositada em mim, toda paciência, todo suporte acadêmico e principalmente
pela oportunidade de participar deste trabalho de pesquisa. Ao meu co-
orientador Professor Paulo Cezar pelas sugestões e comentários sempre
precisos e relevantes.
A todos os professores e colegas do Departamento de Informática da
PUC-Rio e do IMPA pelo ótimo ambiente acadêmico.
A todos os amigos do laboratório Tecgraf, principalmente à Carolina
Alfaro pelas revisões feitas no texto da tese.
A todos os amigos da Petrobras, em especial ao Marcos Machado pela
parceria no desenvolvimento desta pesquisa.
A todos os amigos e amigas que de alguma forma contribuíram para a
realização deste trabalho.
Ao CNPq e à PUC-Rio pelos auxílios concedidos sem os quais este
trabalho não poderia ter sido realizado.

Resumo Silva, Pedro. Visualização Volumétrica de Horizontes em Dados Sísmicos 3D. Rio de Janeiro, 2004. 104p. Tese de Doutorado - Departamento de Informática, Pontifícia Universidade Católica do Rio de Janeiro.
Neste trabalho apresentamos os aspectos da visualização volumétrica de
horizontes em dados sísmicos 3D. Consideramos as abordagens de visualização
volumétrica direta e indireta. Na abordagem direta investigamos o problema da
seleção de horizontes usando a função de transferência. Apresentamos a
técnica de opacidade 2D que busca aumentar a habilidade de seleção dos
horizontes para visualização. Comparamos a utilização dos atributos de fase
instantânea, fase ajustada e fase desenrolada como segunda dimensão,
enquanto a primeira é a amplitude sísmica. Ainda na abordagem direta,
mostramos que o gradiente da amplitude sísmica não aproxima bem os vetores
normais nos horizontes sísmicos. Sugerimos o gradiente da fase instantânea
como solução para este problema. Na abordagem de visualização volumétrica
indireta introduzimos uma modelagem de otimização para o problema de
rastreamento de horizontes. Sugerimos um método heurístico baseado em uma
estratégia gulosa para encontrar soluções que são boas aproximações para os
horizontes mesmo na presença de estruturas geológicas complexas.
Palavras-chave Visualização volumétrica; Dados sísmicos 3D; Rastreamento de
Horizontes; Orientação local; Iluminação de Horizontes; Atributos Sísmicos
Instantâneos.

Abstract Silva, Pedro. Volume Visualization of Horizons in 3-D Seismic Data. Rio de Janeiro, 2004. 104p. Tese de Doutorado - Departamento de Informática, Pontifícia Universidade Católica do Rio de Janeiro.
This work presents the aspects of volume visualization of seismic horizons
in 3-D seismic data. We consider both the direct and indirect approach of volume
visualization. In the direct approach we investigate the problem of selecting
horizons using the transfer function. We present the 2-D opacity technique which
tries to increase ability to select horizons for visualization. We compare the use of
instantaneous phase, adjusted phase and unwrapped phase as the second
dimension, while seismic amplitude is the first dimension. Also in the direct
approach, we show that the seismic amplitude gradient is not a good
approximation for the normal vectors in seismic horizons. We suggest the
gradient of instantaneous phase as a solution to this problem. In the indirect
volume visualization approach we introduce a new optimization model for the
seismic horizon tracking problem. We present a heuristic method based on a
greedy strategy for finding solutions that are good approximations for the horizon
of interest, even for complex geological structures.
Keywords Volume Rendering; 3-D Seismic data; Seismic Horizon Tracking; Local
Orientation; Seismic Horizon Illumination; Instantaneous Seismic Attributes.

Sumário
1 Introdução 14 1.1. Objetivos 14 1.2. Estrutura do Documento da Tese 15
2 Conceitos Básicos 17 2.1. Dados Sísmicos 3D 17 2.1.1. Aquisição 18 2.1.2. Processamento 19 2.1.3. Interpretação 21 2.2. Visualização Volumétrica direta com texturas 3D 21 2.2.1. Amostragem da textura 23 2.2.2. Composição 23 2.2.3. Freqüência de amostragem 24 2.2.4. Gerenciando a memória de textura 24 2.2.5. Iluminação 25 2.2.6. Função de Transferência 28 2.2.7. Algoritmo 29 2.2.8. Funções de transferência multidimensionais 33
3 Opacidade 2D 39 3.1. Motivação 39 3.2. Trabalhos Relacionados 42 3.3. Soluções Propostas 43 3.3.1. Amplitude Sísmica X Fase Instantânea 44 3.3.2. Amplitude Sísmica X Fase Ajustada 49 3.3.3. Amplitude Sísmica X Fase Desenrolada 55 3.4. Conclusões Parciais 62
4 Iluminação de Dados Sísmicos 63 4.1. Motivação 63 4.2. Trabalhos Relacionados 70 4.3. Solução Proposta 70

4.4. Resultados 72 4.5. Conclusões Parciais 77
5 Rastreamento de Horizontes Sísmicos 79 5.1. Trabalhos Relacionados 80 5.2. Modelagem de Otimização 80 5.2.1. Volumétrico Sísmico Discreto 80 5.2.2. Conjunto de traços do dado 81 5.2.3. Horizonte Sísmico Discreto 82 5.2.4. Conjunto de Sementes 82 5.2.5. Função de Similaridade 83 5.2.6. Função de Semente Associada 84 5.2.7. Problema de Otimização 84 5.3. Método Proposto 85 5.3.1. Inicialização 86 5.3.2. Aprimoramento da Solução Corrente 86 5.3.3. Convergência 88 5.3.4. Análise de Complexidade 88 5.4. Resultados 90 5.5. Conclusões Parciais 95
6 Conclusões e Trabalhos Futuros 96 6.1. Conclusões 96 6.2. Trabalhos Futuros 97
7 Bibliografia 98
Apêndice A: Transformada de Hilbert 102

Lista de Símbolos
Capítulo 3
( )X t Traço sísmico. Função de amplitude sísmica medida na direção
vertical (tempo).
( )Y t Transformada de Hilbert de um traço sísmico.
( )h t Núcleo da transformada de Hilbert.
∗ Sinal de convolução.
i Identidade complexa. 1i = − .
( )Z t Traço analítico. ( ) ( ) ( )Z t X t iY t= + ∈ .
( )A t Amplitude instantânea (envelope).
( )tθ Fase instantânea.
( )tθ ′ Fase ajustada.
Capítulo 4
),,( yxtX
Campo escalar de amplitudes sísmicas.
),,( yxtY Campo escalar das transformadas de Hilbert dos traços sísmicos.
),,( yxtθ Campo escalar de fase instantânea.
)(tf Freqüência instantânea.
n Vetor normal.
),,( BGR Representação de cor RGB.
Capítulo 5
Conjunto dos números inteiros.
3 Espaço discreto { }( , , ) | , ,i j k i j k ∈ .
U Subconjunto de 3Z onde o dado sísmico está amostrado. 3[0, 1] [0, 1] [0, 1]U NT NX NY= − × − × − ⊂ Z
U~ Espaço discreto que representa o conjunto de traços do dado.
[0, 1] [0, 1]U NX NY= − × − .
( , , )X i j k Valor da amplitude sísmica amostrada em um ponto de U .

:X U → R
NT Número de amostras em cada traço do dado.
NX Número de crosslines do dado.
NY Número de inlines do dado.
S Conjunto de voxels de U escolhidos como sementes.
v Traço ( , )v x y U= ∈ que contém o voxel ( , , )v t x y U= ∈ .
σ Função de similaridade entre voxels. :U Uσ × → R .
H Conjunto de voxels contidos num horizonte sísmico. Pode ser
interpretado como um par ( , )H W τ= .
H + Conjunto de voxels candidatos a entrar na solução H .
s Função que associa uma semente a cada voxel de um horizonte.
:s H S→ .
Introdução 11
Lista de figuras
Figura 1 – Etapas da exploração baseada na sísmica de reflexão. 17 Figura 2 – Aquisição sísmica. Adaptada de (Gerhardt, 1998). 18 Figura 3 - Traço sísmico (esquerda), Linha sísmica (centro) e volume sísmico
(direita). 20 Figura 4 – Modelo de convolução. Adaptado de (Gerhardt, 1998). 20 Figura 5 – Modelo geológico. Adaptada de (Robinson e Treitel, 1980). 21 Figura 6 – Geometrias de amostragem. Adaptada de (Blythe e McReynolds,
2000). 23 Figura 7 – Volume de dados dividido em tijolos. 25 Figura 8 – Iluminação de uma superfície de nível de um volume. Adaptado de
(Hadwiger et al, 2002) 26 Figura 9 – Gradiente de uma superfície de nível. Adaptado de (Westermann e
Ertl, 1998). 27 Figura 10 – Voxels com densidade baixa (esquerda), voxels com densidade alta
(centro), voxels com densidade baixa e alta (direita). 28 Figura 11 – Mapeamento de dados da memória principal para a placa de vídeo.31 Figura 12 – Cálculo de iluminação feito por pixel durante a visualização. 33 Figura 13 – Função de Transferência Bidimensional. Adaptada de (Pfister et al,
2001) 34 Figura 14 – Realce de fronteiras. Adaptada de (Pfister et al, 2001) 35 Figura 15 – Mapeamento de dados. Função de transferência 2D. 36 Figura 16 – Função de transferência 2D. 38 Figura 17 - Superposição dos intervalos de amplitudes dos eventos sísmicos 40 Figura 18 - Dado sintético simulando uma estrutura de domo (anticlinal). 41 Figura 19 - Efeito da superposição de intervalos de amplitude na visualização
volumétrica de dados sísmicos. 42 Figura 20 - Amplitude sísmica e fase instantânea de um traço sísmico real 45 Figura 21 - Função de transferência 2D (esquerda) e visualização volumétrica do
dado do Domo (direita). 46 Figura 22 - Evento de interesse isolado graças a opacidade 2D. Função de
transferência (esquerda) e visualização volumétrica do evento (direita). 47 Figura 23 - Volume de dados real (esquerda). Eventos sísmicos reais
destacados (direita). 48

Introdução 12
Figura 24 - Função de opacidade 1D aplicada a um dado sísmico real (acima).
Função de opacidade 2D aplicada a um dado sísmico real (abaixo). 49 Figura 25 - Artefatos na visualização volumétrica da Fase igual a zero. 51 Figura 26 - Função de ajuste de fase. Expressão (esquerda) e gráfico (direita). 51 Figura 27 - Histogramas 2D de Amplitude X Fase Instantânea (esquerda) e
Amplitude X Fase Ajustada (direita). 52 Figura 28 – Comparação entre Fase Instantânea e Fase Ajustada. 53 Figura 29 – Visualização volumétrica dos eventos positivos e negativos
separadamente usando a fase ajustada. 54 Figura 30 – Fase desenrolada em 1D. 56 Figura 31 – Fase desenrolada em 2D. Dado sintético. 58 Figura 32 – Fase desenrolada em 2D. Dado real. 59 Figura 33 – Comparação da opacidade 2D com fase instantânea e fase
desenrolada. Dado sintético. 60 Figura 34 – Comparação da opacidade 2D com fase instantânea e fase
desenrolada. Dado real. 61 Figura 35 - Traço gerador do modelo domo com os eventos destacados. 64 Figura 36 – Visualização volumétrica do modelo plano. 65 Figura 37 – Visualização volumétrica direta com iluminação aplicada ao modelo
plano. 66 Figura 38 – Modelo domo modificado. Modelo sintético com variação de
amplitudes ao longo dos refletores. 68 Figura 39 – Iluminação aplicada a um horizonte com variação lateral de
amplitudes. 69 Figura 40 – Superfícies de nível do modelo sintético do domo modificado. 69 Figura 41 – Imagem do modelo plano obtida pelo método proposto (esquerda).
Imagem obtida pelo método tradicional (direita). 73 Figura 42 – Gráfico da amplitude sísmica, fase instantânea e freqüência
instantânea do traço gerador do modelo plano. 73 Figura 43 – Visualização do campo vetorial normal. Campo normal à superfície
de uma esfera (esquerda). Campo normal a um horizonte sísmico obtido pela
solução proposta (centro), campo obtido pelo método tradicional (direita). 75 Figura 44 – Visualização volumétrica do dado sintético com variação de
amplitudes ao longo dos horizontes: sem iluminação (equerda), iluminado
usando a solução proposta (centro) e iluminado da maneira tradicional (direita).76 Figura 45 – Visualização volumétrica de um dado sísmico 3D real: sem

Introdução 13
iluminação (esquerda), iluminação usando o método proposto (centro) e
iluminação usando a abordagem tradicional (direita). 76 Figura 46 – Visualização volumétrica. Adaptado de (Silva et al, 2003). 77 Figura 47 – Horizonte sísmico em um dado real. 90 Figura 48 – Evolução do algoritmo. 91 Figura 49 – Sementes e função de semente associada. 92 Figura 50 – Estrutura temporal do horizonte. 92 Figura 51 – Horizontes diferentes alinhados por uma falha geológica. 93 Figura 52 – Horizonte “A” rastreado usando uma ferramenta comercial. 94 Figura 53 – Horizonte “A” rastreado usando nosso método de rastreamento. 95

Introdução 14
1 Introdução
1.1. Objetivos
O objetivo principal deste trabalho é analisar a aplicação das técnicas de
visualização volumétrica a dados sísmicos 3D. A visualização volumétrica é um
processo de síntese de imagens que trabalha com modelos descritos
implicitamente. Estes modelos, chamados de dados volumétricos ou
simplesmente volumes, apresentam-se como amostras de um campo escalar
obtidas em um grid regular. Os dados obtidos por tomografia computadorizada e
ressonância magnética são exemplos de volumes e são utilizados principalmente
em medicina, dados volumétricos também são originados como resultado de
simulações de fenômenos físicos. Para os dados desta natureza os algoritmos
de visualização volumétrica conhecidos hoje em dia são capazes de produzir
imagens bastante informativas e com alta qualidade visual.
Os dados sísmicos volumétricos são modelos implícitos da subsuperficie
que integram as características estruturais e estratigráficas das subcamadas. A
industria de óleo e gás vem utilizando a visualização volumétrica em volumes
sísmicos na área de exploração, tanto para controle de qualidade quanto para
auxilio a interpretação, pois esta permite a obtenção de uma visão prévia das
feições geológicas contidas no dado de maneira relativamente simples e
interativa.
Apesar dos dados sísmicos volumétricos se adequarem ao modelo
esperado pelos algoritmos de visualização volumétrica, isto é, serem um
conjunto de amostras obtidas em cima do campo escalar de amplitude sísmica
em uma grade regular, vários problemas ocorrem ao se tentar aplicar
diretamente as técnicas de visualização volumétrica aos dados de natureza
sísmica.
Neste trabalho consideramos problemas que ocorrem nas etapas de
classificação e iluminação que integram a maioria dos algoritmos de visualização
volumétrica direta. A etapa de classificação consiste na aplicação da função de
transferência ao volume, é a função de transferência que determina qual porção

Introdução 15
do dado estará visível na imagem final e defina as propriedades óticas dessa
porção, como por exemplo, a cor e a opacidade. Para selecionar regiões de
interesse em dados sísmicos, que são os eventos sísmicos, sugerimos a
utilização de funções de transferência multidimensionais. Analisando a natureza
oscilatória do dado sísmico propomos funções de transferência bidimensionais,
definidas nas dimensões de amplitude (dimensão original) e fase instantânea
(atributo sísmico calculado a partir da amplitude).
Na etapa de iluminação o gradiente do volume freqüentemente é usado
como vetor normal à superfície de interesse para o cálculo de iluminação local. É
um dos resultados deste trabalho a verificação de que esta abordagem não se
aplica a dados sísmicos novamente devido a sua natureza oscilatória. Propomos
aqui a utilização do gradiente do atributo de fase instantânea como estimador da
orientação local dos horizontes sísmicos e validamos esta técnica em volumes
sísmicos sintéticos e reais.
O rastreamento de horizontes pode ser considerado, do ponto de vista de
visão computacional, como uma técnica de segmentação ou, do ponto de vista
de modelagem e visualização, como uma técnica de extração de superfícies. A
finalidade do rastreamento vai além da simples visualização do horizonte. Mas,
dentro do contexto deste trabalho de tese, consideramos o rastreamento de
horizontes como sendo uma técnica de visualização volumétrica direta adaptada
para dados sísmicos. Apresentamos neste trabalho uma abordagem de
otimização para o rastreamento de horizontes como uma opção de visualização
volumétrica indireta de horizontes sísmicos.
1.2. Estrutura do Documento da Tese
No capítulo 2 fazemos uma pequena revisão de alguns conceitos básicos
que são importantes para a compreensão do restante do documento. Este
capítulo está dividido basicamente em duas partes. Na primeira parte
apresentamos os dados sísmicos 3D, sua origem e características básicas.
Também definimos o que são horizontes sísmicos que são o principal objeto de
estudo deste trabalho. Esta parte é destinada principalmente aos pesquisadores
da área de computação gráfica que não estão familiarizados com os dados desta
natureza. Na segunda parte descrevemos com um certo nível de detalhe o
método de visualização volumétrica baseada em texturas 3D e a técnica de
funções de transferência multidimensionais. Julgamos esta parte importante pois

Introdução 16
nela está descrita a implementação do sistema utilizado para testar as idéias dos
capítulos 3 e 4. Esta parte é destinada principalmente aos pesquisadores da
área de geologia e geofísica que não estão familiarizados com esta técnica de
computação gráfica.
No capítulo 3 apresentamos a técnica de opacidade 2D. A técnica de
opacidade 2D é uma aplicação de funções de transferência multidimensionais à
dados sísmicos. Esta aplicação foi publicada por nós em um trabalho anterior.
Neste capítulo sugerimos o uso de atributos sísmicos instantâneos juntamente
com a amplitude sísmica na opacidade 2D. Fazemos uma comparação dos
resultados obtidos com o atributo de fase instantânea, fase ajustada e fase
desenrolada. O critério de comparação entre os atributos é a capacidade de se
isolar horizontes sísmicos usando o atributo na opacidade 2D.
No capítulo 4 analisamos a etapa de iluminação dos algoritmos de
visualização volumétrica direta, apresentamos os problemas que ocorrem nesta
etapa ao adotar o gradiente do campo escalar como vetor normal no modelo de
iluminação local. Descrevemos a utilização do gradiente do atributo de fase
instantânea como solução para este problema. Apresentamos os resultados
obtidos em dados sísmicos sintéticos e reais.
No capítulo 5 sugerimos uma modelagem de otimização para o problema
do rastreamento de horizontes sísmicos. Em seguida propomos um método
heurístico baseado em uma estratégia gulosa para encontrar soluções quase-
ótimas para o problema. Mostramos através de exemplos que as soluções
quase-ótimas obtidas são boas aproximações para os horizontes sísmicos.
No capítulo 6 faremos as considerações finais sobre o trabalho de
pesquisa desenvolvido e apresentamos a pesquisa em andamento que poderá
resultar em outros trabalhos no futuro.
O Apêndice A contém um resumo da teoria da Transformada de Hilbert
que é usada no cálculo dos atributos sísmicos instantâneos.
Conceitos Básicos 17
2 Conceitos Básicos
O caráter interdisciplinar deste trabalho torna necessária a apresentação
de conceitos básicos da área de exploração sísmica e de computação gráfica.
Na seção seguinte faremos uma breve descrição do processo de obtenção de
dados sísmicos 3D. Em seguida introduziremos os atributos sísmicos
instantâneos têm um papel importante no nosso estudo.
As discussões e resultados relativos à visualização volumétrica direta de
dados sísmicos contidos neste documento (capítulos 3 e 4) são independentes
de implementação, ou seja, são pertinentes as implementações de sistemas de
visualização volumétrica de dados sísmicos em geral. Porém, para validar
nossas idéias desenvolvemos um sistema de visualização volumétrica baseado
na utilização de texturas 3D. Escolhemos esta opção por esta permitir um bom
nível de interatividade com o modelo. Atualmente existe uma vasta literatura
sobre o uso de textura 3D na visualização volumétrica direta. Na seção 2.2.1
faremos um apanhado das técnicas usadas na nossa implementação.
2.1. Dados Sísmicos 3D
A sísmica de reflexão é um método indireto de exploração da subsuperfície
da terra. Este método vem sendo largamente utilizado pelo fato de ser capaz de
cobrir grandes áreas e ser extremamente mais econômico quando comparado
com um método direto, como por exemplo, a perfuração de poços. Segundo
(Robinson e Treitel, 1980) a exploração de hidrocarbonetos, óleo e gás, baseada
em sísmica pode ser dividida em três etapas: aquisição, processamento e
interpretação.
Aquisição Processamento Interpretação
Exploração (Óleo e Gás) baseada em Sísmica
Aquisição Processamento Interpretação
Exploração (Óleo e Gás) baseada em Sísmica Figura 1 – Etapas da exploração baseada na sísmica de reflexão.

Conceitos Básicos 18
Nas subseções seguintes faremos uma breve descrição de cada etapa.
Para uma visão mais aprofundada sugerimos consultar os trabalhos (Gerhardt,
1998), (Machado, 2000), (Robinson e Treitel, 1980) e (Yilmaz, 1987).
2.1.1. Aquisição
A aquisição é feita usando uma fonte para gerar ondas sísmicas que se
propagam abaixo da superfície da terra. Em aquisições terrestres é comum usar
explosões de dinamite como fonte, em aquisições marinhas são usados
normalmente dispositivos pneumáticos como canhões de ar. Quando a onda
sísmica alcança uma interface entre duas camadas de rocha com valores de
impedância acústica diferentes, parte da onda é refratada e continua viajando
para baixo; outra parte é refletida. A porção da energia refletida é proporcional a
diferença de impedância acústica entre os dois meios. A parte refletida da onda
retorna à superfície, é captada nos receptores (geofones em aquisições
terrestres ou hidrofones em marinhas) e gravada nos sismógrafos. O sismógrafo
armazena tanto o tempo de chegada da onda quanto a intensidade medida
neste momento. Após várias detonações variando a posição da fonte e dos
receptores, todo o dado armazenado é enviado para ser processado. A Figura 2
ilustra os processos de aquisição terrestre e marinha.
Figura 2 – Aquisição sísmica. Adaptada de (Gerhardt, 1998).

Conceitos Básicos 19
2.1.2. Processamento
Na etapa de processamento alguns erros inerentes ao fenômeno físico são
corrigidos no levantamento. Além disso, o dado é reorganizado para formar uma
grade tridimensional com uma amostra de amplitude sísmica em cada vértice da
grade (voxel). Duas das dimensões do dado são direções espaciais e estão
relacionadas com as posições das fontes e dos receptores. Uma das
transformações realizadas no dado durante o processamento faz com que as
posições da fonte e do receptor sejam a mesma. Também graças a esta
transformação podemos considerar a terceira dimensão do dado como sendo o
tempo e que a propagação da onda é feita apenas na direção vertical. Como
podemos considerar que a fonte e o receptor estão na mesma posição na
superfície, o tempo de cada amostra corresponde ao tempo que a onda leva
para viajar até uma interface mais o tempo da volta à superfície. Uma coluna de
amostras com mesmas coordenadas espaciais, variando apenas o tempo, é
chamada de traço sísmico.
A organização das amostras em um dado sísmico é mostrada na Figura 3.
Do lado esquerdo temos a função de amplitudes sísmicas do traço sísmico a
única dimensão é a temporal (1D). No centro temos uma seção vertical do dado,
esta seção vertical é formada por um conjunto de traços sísmicos e é chamada
de linha sísmica (2D); uma dimensão é espacial e a outra temporal. No caso do
dado sísmico 3D (volume sísmico), formado por várias linhas sísmicas, temos
duas direções temporais, que são chamadas de inline (direção das linhas
sísmicas) e crossline (direção perpendicular as linhas sísmicas), e uma direção
temporal.

Conceitos Básicos 20
AMPLITUDES
13
017
1925313743495561677379859197
103109115121
TEM
PO
AMPLITUDES
13
017
1925313743495561677379859197
103109115121
TEM
PO
AMPLITUDES
13
017
1925313743495561677379859197
103109115121
TEM
PO
Figura 3 - Traço sísmico (esquerda), Linha sísmica (centro) e volume sísmico (direita).
Um modelo matemático interessante que descreve bem o efeito do
processamento sísmico realizado sobre o dado é o modelo de convolução,
ilustrado na Figura 4. Neste modelo consideramos a função de amplitude
sísmica de cada traço do dado como sendo o resultado da convolução de um
impulso sísmico com uma função refletividade, a rigor a função refletividade é
uma distribuição de coeficientes de reflexão. Os coeficientes de reflexão são
proporcionais à diferença de impedância acústica entre camadas geológicas
adjacentes.
Cam
adas
Geo
lógi
cas
Coe
ficie
ntes
de R
efle
xão
∗
Am
plitu
des S
ísm
icas
Traço
ImpulsoSísmicoC
amad
asG
eoló
gica
s
Coe
ficie
ntes
de R
efle
xão
∗
Am
plitu
des S
ísm
icas
Traço
ImpulsoSísmico
Figura 4 – Modelo de convolução. Adaptado de (Gerhardt, 1998).

Conceitos Básicos 21
2.1.3. Interpretação
Na etapa de interpretação o intérprete, em geral um geólogo, analisa os
dados sísmicos e tenta criar um modelo que represente a geologia contida na
área do levantamento. A Figura 5 mostra um modelo geológico que poderia ser
resultante da interpretação de uma linha sísmica. A interpretação sísmica pode
ser classificada em dois tipos de acordo com o foco. A interpretação estrutural
basicamente tenta identificar as camadas geológicas, ou de forma equivalente as
interfaces entre as camadas, bem como as falhas geológicas que recortam as
camadas. Na interpretação estratigráfica o foco do trabalho está em entender a
maneira como as camadas foram se formando ao longo do tempo.
Figura 5 – Modelo geológico. Adaptada de (Robinson e Treitel, 1980).
(Sheriff, 1991) define um horizonte sísmico como sendo: a superfície
separando duas camadas diferentes de rocha, onde tal superfície (mesmo sem
ter sido identificada) está associada com uma reflexão que se estende por uma
grande área. Um horizonte sísmico se manifesta em um dado sísmico como uma
série de picos (ou vales) de amplitudes sísmica que aparecem de forma
consistente traço a traço. O mapeamento dos horizontes do dado é uma das
tarefas mais importantes da interpretação sísmica.
2.2. Visualização Volumétrica direta com texturas 3D
A visualização volumétrica é um processo de síntese de imagens onde os
dados de entrada são modelados matematicamente como um campo escalar
tridimensional. A versão discreta deste modelo implícito é um conjunto de
amostras tomadas em uma grade regular tridimensional. Cada amostra

Conceitos Básicos 22
armazena um número real correspondente ao valor do campo em um dado ponto
da grade. A grande maioria das aplicações quantiza as amostras para
armazená-las como inteiros de 8 bits. Como exemplos de modelos volumétricos
podemos citar os dados obtidos por tomografia computadorizada, ressonância
magnética, resultados de simulações físicas, equações matemáticas implícitas e
dados sísmicos.
Existem duas estratégias distintas na visualização volumétrica. Na
estratégia indireta visualizamos superfícies extraídas do modelo implícito. Na
abordagem direta utilizamos transparências para conseguir visualizar estruturas
tridimensionais complexas dentro do dado. Esta abordagem é indicada para
modelos onde a extração de superfícies é difícil.
Os algoritmos de visualização volumétrica direta produzem imagens
associando cor e opacidade a cada voxel. Esta associação é feita indiretamente,
isto é, uma tabela de cor e opacidade é criada para os valores armazenados nos
voxels. Por exemplo, em um algoritmo que usa uma representação de 8-bits
para os valores armazenados as tabelas de cor e opacidade possuem 256
entradas. A função que associa a cada valor do campo escalar uma cor e uma
opacidade é chamada de função de transferência.
Existem vários algoritmos de visualização volumétrica direta, entre eles
podemos citar ray casting (Levoy, 1988), shear-warp (Lacroute and Levoy, 1994)
e splatting (Westover, 1990) como alguns dos mais importantes.
O algoritmo de visualização volumétrica baseado em texturas é
equivalente ao algoritmo de ray casting e produz os mesmos resultados.
Enquanto no algoritmo de ray casting a imagem é construída lançando um raio
para cada pixel, na abordagem por textura vários raios são processados
simultaneamente, uma fatia 2D por vez. O dado é armazenado em textura 3D e
a fatia é utilizada para amostrar a textura. As fatias com textura aplicada são
combinadas para formar a imagem final. Como esta abordagem pode ser
acelerado por hardware, o algoritmo usando textura é mais rápido do que o ray
casting. Em sistemas onde o hardware gráfico não implementa texturas 3D uma
versão mais limitada pode ser implementada com texturas 2D. Porém, a
implementação com textura 3D é mais simples, e produz imagens com qualidade
melhor.

Conceitos Básicos 23
2.2.1. Amostragem da textura
A textura 3D em geral é amostrada usando planos perpendiculares a
direção de visualização. Porém, quando o observador está muito próximo ao
volume, ou mesmo dentro do volume, uma amostragem mais correta da textura
pode ser obtida utilizando conchas esféricas centradas na posição do
observador. A Figura 6 ilustra as geometria de amostragem formadas por fatias
planas e por conchas esféricas. A geometria de amostragem escolhida é
decomposta em polígonos recortados pelos limites do volume. A textura 3D
contendo o dado volumétrico é aplicada aos polígonos recortados. As fatias
texturizadas são compostas de trás para frente na direção do observador. A
composição é feita utilizando o operador over (Drebin et al, 1988).
Fatias planasFatias planas
(a)
ConchasConchas
(b)
Figura 6 – Geometrias de amostragem. Adaptada de (Blythe e McReynolds, 2000).
2.2.2. Composição
O operador over é a maneira mais comum de compor as amostras
transparentes na visualização volumétrica. Este operador também é utilizado em
outros algoritmos de visualização volumétrica direta como, por exemplo, o ray
casting. O operador over aproxima a integral de iluminação definida pelo
transporte da luz através do volume transparente. A opacidade (transparência)
de uma amostra está armazenada no valor do canal alfa do texel. Texels com
valores de alfa alto obstruem a visualização dos texels que estão atrás.
Segundo (Wittenbrink, 1998) para evitar artefatos de interpolação as cores
das amostras devem ser multiplicadas pela opacidade antes de serem

Conceitos Básicos 24
interpoladas. Portanto, o operador over pode ser implementado definindo a
função de blending do OpenGL da seguinte forma:
glBlendFunc(GL_ONE, GL_ONE_MINUS_SRC_ALPHA);
2.2.3. Freqüência de amostragem
Segundo (Blythe e McReynolds, 2000) existem vários fatores que devem
ser levados em conta na hora de escolher o número de fatias (planos ou
conchas esféricas) usadas na amostragem da textura.
A performance que se deseja obter é um dos fatores mais importantes,
quanto maior é o número de fatias menor a performance. Em geral os sistemas
de visualização volumétrica baseados em textura operam em dois modos: um
modo ‘interativo’ onde são usadas poucas fatias, para garantir maior
performance; e um modo ‘detalhado’ onde são usadas mais fatias, para obter
uma imagem com maior qualidade.
Para evitar artefatos de re-amostragem é importante considerar os texels
como sendo cúbicos, ou seja, temos uma amostragem uniforme em todas
direções. Portanto, é interessante ter uma freqüência de amostragem entre as
fatias igual à freqüência de amostragem do dado. Isto pode ser conseguido
definindo o número de fatias igual a soma das dimensões do dado (em texels).
Aumentar exageradamente o número de fatias pode tornar difícil a
visualização da porção mais afastada do dado. O operador over é não-linear, por
isso é difícil compensar o aumento do número de fatias com uma atenuação da
opacidade das fatias.
Quando a visualização é feita com projeção em perspectiva a freqüência
de amostragem deve aumentar com a distância ao observador. Devido a
distorção da perspectiva a parte mais afastada do dado deve parecer mais
densa.
2.2.4. Gerenciando a memória de textura
O algoritmo de visualização volumétrica baseada em texturas 3D é capaz
de tratar volumes grandes que não cabem na memória de textura. Para isto o
volume é dividido em vários pequenos volumes, chamados de tijolos. A Figura 7

Conceitos Básicos 25
ilustra a subdivisão de um volume em tijolos. O tamanho dos tijolos é escolhido
para que cada um caiba na memória de textura.
Figura 7 – Volume de dados dividido em tijolos.
Durante a visualização cada tijolo é carregado na memória de textura,
amostrado por fatias e o resultado é composto, como descrito anteriormente.
Assim como as fatias, os tijolos são processados de trás para frente na direção
do observador.
Para evitar erros na re-amostragem do dado nas emendas dos tijolos, o
recorte dos polígonos e suas coordenadas de textura devem ser ajustadas para
não usarem os texels das faces dos tijolos. Além disso, cada tijolo é construído
de forma que os texels de suas faces sejam comuns, respectivamente, a cada
um dos seus 6 vizinhos. Com isso garantimos que os tijolos encaixem
corretamente na imagem resultante.
Podemos encontrar mais informações sobre paginação (paging) de
texturas em geral na seção 6.8 de (Blythe e McReynolds, 2000).
2.2.5. Iluminação
Os modelos de iluminação local aproximam pontualmente a interação entre
a luz e a superfície de um objeto. Em um modelo local, como o modelo de
Phong, a intensidade da luz refletida em um ponto é calculada em função da
orientação da superfície; da posição e direção da fonte de iluminação; e de
propriedades óticas do material do objeto. Nestes modelos a orientação local da
superfície é estimada pelo vetor normal em cada ponto. Portanto, para aplicar o
um modelo de iluminação local à visualização volumétrica é necessário estimar o

Conceitos Básicos 26
vetor normal em cada voxel. Para a maioria dos campos escalares o vetor
gradiente pode ser um substituto apropriado para o vetor normal da superfície,
uma vez que o gradiente é o próprio vetor normal da superfície de nível em cada
voxel. A Figura 8 mostra o modelo de Phong aplicado na visualização de uma
superfície de nível de um volume de dado médico. Na figura temos: (a) apenas a
componente ambiente; (b) componentes ambiente e difusa; (c) componentes
ambiente, difusa e especular.
(a) (b)
(c)
Figura 8 – Iluminação de uma superfície de nível de um volume. Adaptado de (Hadwiger
et al, 2002)
Existem diversas maneiras de calcular o gradiente em um dado
volumétrico. Em nossa implementação utilizamos o método diferenças centrais,
que é derivado dos primeiros termos da série de Taylor. Na visualização
volumétrica baseada em textura o campo gradiente é pré-computado e
armazenado como uma textura 3D. As três componentes do gradiente
normalizado são transformadas do intervalo [ ]1,1− para o intervalo [0,1] e
armazenadas como triplas RGB.
( , , )I x y z (1)
( 1, , ) ( 1, , )( , 1, ) ( , 1, )( , , 1) ( , , 1)
x
y
z
I I x y z I x y zI I I x y z I x y z
I I x y z I x y z
+ − − ∇ = = + − − + − −
(2)

Conceitos Básicos 27
x
y
z
nIn nI
n
∇ = = ∇
(3)
1
1 12
1
x
y
z
R nG nB n
+ = + +
(4)
Na Figura 9 temos uma visualização do campo vetorial do gradiente em
uma superfície de nível. As cores, definidas pelo mapeamento da eq. (4),
representam os vetores do campo gradiente do volume.
Figura 9 – Gradiente de uma superfície de nível. Adaptado de (Westermann e Ertl, 1998).
Em (Westermann e Ertl, 1998) é apresentada uma implementação para a
visualização de superfícies de nível, com cálculo de iluminação feito dentro da
placa gráfica. Ao desenhar os polígonos da geometria de amostragem o teste de
alfa do OpenGL é usado para filtrar os voxels da superfície de nível desejada. A
matriz de cor do OpenGL é utilizada para armazenar a direção da fonte de
iluminação. Após a projeção dos polígonos os pixels da imagem são copiados do
frame buffer para ele mesmo. A cor, contendo os vetores normais, dos pixels
copiados é multiplicada pela matriz de cor resultando no cálculo da equação de
iluminação.
A arquitetura da placa de vídeo GeForce3 da NVIDIA implementa em
hardware os combinadores de registro (register combiners) além da textura 3D
(Spitzer, 2001). Os combinadores de registro permitem que se façam operações
sobre texturas. Uma implementação do cálculo da iluminação feita no hardware,
baseada nesta arquitetura é apresentada em (Rezk-Salama, 2000). A
implementação do nosso sistema é baseada nesta abordagem. As placas de

Conceitos Básicos 28
vídeo da ATI, a partir da RADEON 8500 implementam um recurso de hardware
chamado de framgment shaders que são similares aos combinadores de registro
da NVIDIA.
Atualmente as placas gráficas programáveis permitem uma implementação
simples do cálculo de iluminação. Esta implementação pode ser feita usando a
linguagem Cg (Fernando e Kilgard, 2003).
2.2.6. Função de Transferência
A função de transferência tem um papel fundamental na visualização
volumétrica direta. É através da função de transferência que podemos
determinar as porções visíveis do volume e definir a cor e a transparência com
que estas irão aparecer na imagem. A Figura 10 mostra a visualização
volumétrica de um dado obtido por tomografia computadorizada de uma peça
mecânica. Na imagem à esquerda foi aplicada uma função de transferência que
associa uma cor ciano e opacidade alta (igual a um) aos valores de baixa
densidade, tornando-os totalmente opacos, e associa opacidade baixa (zero) aos
valores de densidade alta tornando-os invisíveis. A imagem do centro foi obtida
com tornando os voxels de densidade baixa associando a estes: opacidade zero,
e opacidade igual a um para os valores de densidade alta que também
receberam a cor vermelha. Na imagem da direita os valores de densidade baixa
tornaram-se transparentes recebendo um valor de opacidade intermediário
(entre zero e um).
Figura 10 – Voxels com densidade baixa (esquerda), voxels com densidade alta (centro),
voxels com densidade baixa e alta (direita).
A função de transferência pode ser vista como uma tabela que associa cor
e transparência (RGBA) a cada valor do volume. A função de transferência
podes ser implementada utilizando uma das tabelas (look-up tables) do OpenGL.
A extensão SGI_texture_color_table consulta a tabela durante a aplicação
Conceitos Básicos 29
da textura, após o valor do fragmento ter sido interpolado. Usando a extensão
EXT_color_table podemos usar uma tabela para converter os valores do
volume para RGBA durante o carregamento da textura, porém a textura será
uma textura RGBA. Se a extensão EXT_paletted_texture estiver disponível
podemos armazenar o volume como uma textura de índices. Esta é uma opção
interessante, pois podemos ajustar a imagem rapidamente a cada modificação
na função de transferência. Atualmente, com as placas de vídeo programáveis
podemos implementar a função de transferência usando um Fragment Program.
2.2.7. Algoritmo
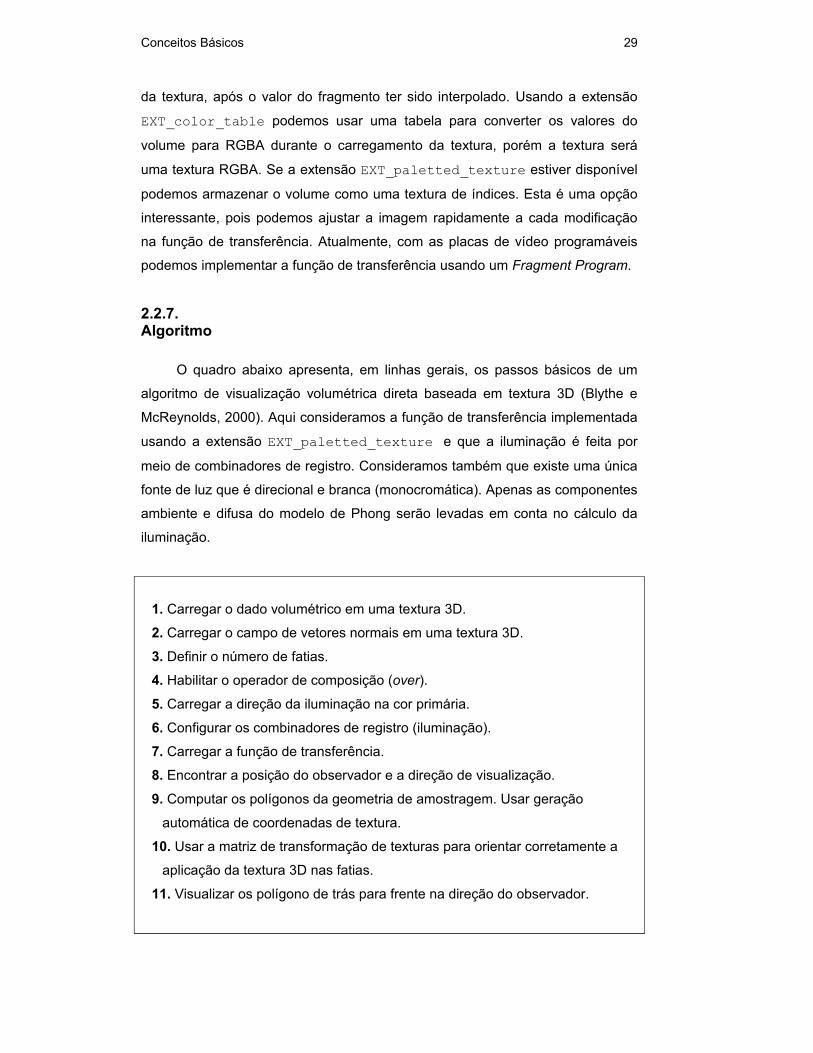
O quadro abaixo apresenta, em linhas gerais, os passos básicos de um
algoritmo de visualização volumétrica direta baseada em textura 3D (Blythe e
McReynolds, 2000). Aqui consideramos a função de transferência implementada
usando a extensão EXT_paletted_texture e que a iluminação é feita por
meio de combinadores de registro. Consideramos também que existe uma única
fonte de luz que é direcional e branca (monocromática). Apenas as componentes
ambiente e difusa do modelo de Phong serão levadas em conta no cálculo da
iluminação.
1. Carregar o dado volumétrico em uma textura 3D.
2. Carregar o campo de vetores normais em uma textura 3D.
3. Definir o número de fatias.
4. Habilitar o operador de composição (over).
5. Carregar a direção da iluminação na cor primária.
6. Configurar os combinadores de registro (iluminação).
7. Carregar a função de transferência.
8. Encontrar a posição do observador e a direção de visualização.
9. Computar os polígonos da geometria de amostragem. Usar geração
automática de coordenadas de textura.
10. Usar a matriz de transformação de texturas para orientar corretamente a
aplicação da textura 3D nas fatias.
11. Visualizar os polígono de trás para frente na direção do observador.

Conceitos Básicos 30
A Figura 11 ilustra como os dados que descrevem a visualização
volumétrica são mapeados para a placa de vídeo. O dado volumétrico é
carregado em uma textura 3D de índices, ou seja, o valor de cada amostra deve
ser mapeado para um inteiro de 8 bits. O campo de vetores normais deve ser
mapeado em uma textura 3D de valores RGB, cada componente, após ter sido
transformada usando a eq. (4), deve ser convertida para um inteiro de 8 bits. A
função de transferência é mapeada em uma tabela com 256 entradas onde cada
entrada contém um quádrupla RGBA, esta tabela é definida como palheta da
textura de índices usando funções da extensão EXT_paletted_texture. A
direção da iluminação também deve ser transformada usando a eq. (4) e em
seguida armazenada em RGB como cor primária. Desta forma os combinadores
de registro podem acessar a direção de iluminação para usá-la no cálculo da
componente difusa.

Conceitos Básicos 31
Dado volumétrico I TEX0 – Textura 3D de Índices
Campo vetorial de normais n TEX1 – Textura 3D (RGB)
R
ABGR
ABGR
ABG
Função de Transferência 1D Palette
COR_PRIMÁRIA
Fonte de luz direcional
Memória Principal Placa de Vídeo
Figura 11 – Mapeamento de dados da memória principal para a placa de vídeo.
O calcula da iluminação é feita por pixel no momento em que cada
polígono é desenhado. A Figura 12 apresenta um esboço do processamento que
é feito pela placa de vídeo durante a visualização. A geração automática de
coordenadas de textura determina para cada vértice do polígono uma tripla
( , , )i i is t r de coordenadas. Durante a rasterização, para cada pixel do polígono é
calculada uma tripla de coordenadas de textura ( , , )s t r interpolando-se as

Conceitos Básicos 32
coordenadas de textura dos vértices. As coordenadas de textura interpoladas
definem um texel em cada unidade de textura.
No caso da figura abaixo temos duas unidades de textura. O texel da
unidade de textura TEX0 determinado pelas coordenadas de textura ( , , )s t r é
um índice que por sua vez determina uma entrada RGBA na tabela da função de
transferência. Essa entrada RGBA contendo a cor e a opacidade da amostra é
então mandada para o combinador final. Na unidade de textura TEX1, o texel
determinado pelas coordenadas de textura ( , , )s t r contem uma tripla RGB que
armazena o vetor normal da amostra. Dentro do combinador de registros o vetor
normal e a cor primária são convertidos de valores RGB novamente para
coordenas e é calculado o produto interno entre eles. O resultado do produto
interno é armazenado em cada componente de outra tripla RGB que também
segue para o combinador final.
No combinador final, a cor vinda da função de transferência (palheta) é
multiplicada pelo resultado do produto interno vindo do combinador de registros.
Esta multiplicação é feita coordenada a coordenada, por isso o combinador de
registros repete o valor do produto interno nas três componentes da sua saída
RGB. O combinador final também pode ser usado para adicionar a componente
de cor ambiente do modelo de Phong. O combinador final não altera o valor da
opacidade da amostra. Finalmente, a saída RGBA do combinador final é
combinada com o RGBA que está no Frame Buffer pelo operador de composição
(over).

Conceitos Básicos 33
Figura 12 – Cálculo de iluminação feito por pixel durante a visualização.
2.2.8. Funções de transferência multidimensionais
As funções de transferências multidimensionais são usadas em dados
volumétricos onde temos mais de um valor por amostra. Estes dados podem ser
campos vetoriais propriamente ditos, uma reunião de diferentes medidas feitas
nas amostras ou uma reunião de diferentes grandezas calculadas nas amostras.
A dimensão da função de transferência é igual ao número de valores por
amostra. O uso de funções de transferência multidimensionais pode aumentar a
capacidade do usuário selecionar a porção visível do dado porém, a
complexidade da tarefa de especificar uma função de transferência de dimensão
alta pode tornar sua aplicação inviável.
O modelo de visualização volumétrica descrito em (Levoy, 1988) já incluía
uma função de transferência 2D. Neste modelo cada amostra possui dois
valores: o próprio valor do campo escalar como primeira dimensão, e o módulo
do gradiente como segunda dimensão. Esta abordagem usa uma função de
transferência fixa que serve para realçar as bordas entre regiões homogêneas
do dado. Extensões para esta abordagem são apresentadas em (Kindlmann e
Durkin, 1998; Kniss, 2002), nestas extensões o usuário pode manipular a função
de transferência. Na Figura 13 e na Figura 14 temos a aplicação da função de

Conceitos Básicos 34
transferência 2D a um dado de tomografia computadorizada de um dente. Na
Figura 13a vemos a distribuição das amostras no plano definido pelos valores
campo escalar e pelo módulo do gradiente do campo. Cada pixel da imagem
corresponde a um par de valores do dado. Com uma ferramenta similar a um
sistema de edição de imagens o usuário pode definir cores para os pares de
valores, como na Figura 13b. Nesta imagem cada região colorida representa
contém os voxels da fronteira entre duas regiões homogêneas do volume.
(a) (b)
Figura 13 – Função de Transferência Bidimensional. Adaptada de (Pfister et al, 2001)
Na Figura 14 temos o resultado da visualização volumétrica com função de
transferência 2D aplicada ao dado do dente. A função de cor utilizada foi a
função da Figura 13b. No canto superior esquerdo de cada imagem temos a
opacidade 2D utilizada. Os tons de cinza representam a opacidade da amostra,
sendo branco para mais opaco e preto para menos opaco. Podemos ver que a
função de transferência bidimensional torna possível o realce das fronteiras entre
as regiões homogêneas do campo escalar.
I∇
IValor do Campo Escalar
Mód
ulo
do G
radi
ente
I∇
IValor do Campo Escalar
Mód
ulo
do G
radi
ente
I∇
IValor do Campo Escalar
Mód
ulo
do G
radi
ente
I∇
IValor do Campo Escalar
Mód
ulo
do G
radi
ente

Conceitos Básicos 35
(a)
(b)
(c)
(d) Figura 14 – Realce de fronteiras. Adaptada de (Pfister et al, 2001)
A função de transferência bidimensional pode ser implementada utilizando
o recurso de textura dependente disponível nas placas de vídeo da NVIDIA
(Spitzer, 2001) ou usando a programabilidade das placas de vídeo mais
modernas. A Figura 15 mostra como é feito o mapeamento dos dados da
memória principal para a placa de vídeo na implementação da função de
transferência 2D. Comparando a Figura 15 com a Figura 11 vemos o que muda
da implementação da função de transferência 1D para a 2D. O dado volumétrico
e o módulo do gradiente do dado são mapeados para uma única textura 3D de
valores RGB. O dado volumétrico para o canal G e o módulo do gradiente para o
canal B. O campo de normais e a direção da iluminação são mapeados da
mesma forma. A função de transferência 2D é mapeada para uma textura 2D de
valores RGBA.

Conceitos Básicos 36
Dado volumétrico I
G
B
G
B
TEX0 – Textura 3D (RGB)
Módulo do gradiente I∇
Campo vetorial de normais n TEX1 – Textura 3D (RGB)
Função de Transferência 2D TEX2 – Textura 2D (RGBA)
COR_PRIMÁRIA
Fonte de luz direcional
Memória Principal Placa de Vídeo
Figura 15 – Mapeamento de dados. Função de transferência 2D.

Conceitos Básicos 37
Na nossa implementação da função de transferência 2D utilizamos 3
unidades de textura. A tabela da função de transferência 1D é substituída por
uma textura dependente. O recurso de textura dependente, disponível nas
placas de vídeo mais recentes da NVIDIA, permite que os canais de cor de um
texel de uma textura sejam utilizados como índices para a textura dependente.
Na nossa implementação a unidade de textura TEX2, contendo a função de
transferência, é dependente da unidade de textura TEX0, contendo o dado e o
módulo do gradiente. Portanto, os canais G e B da unidade TEX0 são usados
como índice na unidade dependente TEX2, ou seja, a cor e a opacidade da
amostra dependem tanto do valor da amostra quanto do módulo do gradiente na
mesma amostra.
Comparando a Figura 16 com a Figura 12 vemos que na implementação
da função de transferência 2D o cálculo da iluminação é o mesmo. Porém, a
maneira de determinar a cor e a opacidade da amostra é diferente. A unidade de
textura TEX0 não armazena mais uma textura de índices, agora a textura em
TEX0 é 3D de valores RGB. As coordenadas de textura ( , , )s t r definem o valor
RGB do texel correspondente. O canais G e B são convertidos em coordenadas
de textura ( , )s t que são usadas para determinar um texel na unidade de textura
2D dependente TEX2. O valor RGBA correspondendo ao texel da unidade de
tetura TEX2 representa a cor e a opacidade da amostra que segue para o
combinador fianal.

Conceitos Básicos 38
(s0,t0,r0) (s1,t1,r1)
(s2,t2,r2)
(s,t,r)
Combinador Final
RGBA
RGB
(s,t,r)
Combinador
COR_PRIMÁRIA
RGB
PRO
DU
TO
INTE
RN
O
Frame Buffer
Mod
elo
de
Phon
g
RGBA
RGB
TEX0 TEX1
G
TEX2
B
(s0,t0,r0) (s1,t1,r1)
(s2,t2,r2)
(s,t,r)
Combinador Final
RGBA
RGBRGB
(s,t,r)
Combinador
COR_PRIMÁRIA
RGB
PRO
DU
TO
INTE
RN
O
Frame Buffer
Mod
elo
de
Phon
g
RGBA
RGB
TEX0 TEX1
G
TEX2
B
TEX2
B
Figura 16 – Função de transferência 2D.

Opacidade 2D 39
3 Opacidade 2D
Neste capítulo apresentaremos o estudo feito sobre a aplicação de funções
de transferência multidimensionais à visualização volumétrica de horizontes em
dados sísmicos 3D. Numa abordagem de visualização volumétrica direta a
função de transferência tem um papel muito importante, pois é ela quem define
como as estruturas tridimensionais contidas no dado aparecerão na imagem
final. A técnica de Opacidade 2D sugere o uso de uma função de transferência
bidimensional, onde a primeira dimensão é sempre o dado de amplitude sísmica.
A cor depende do valor da amplitude sísmica. A opacidade depende da
amplitude sísmica e de um outro atributo sísmico. Apresentaremos neste
capítulo a comparação entre 3 atributos diferentes. Para isto escolhemos uma
estrutura para este capítulo um pouco diferente da tradicional. Na seção seguinte
apresentaremos a motivação da pesquisa. Em seguida citaremos alguns
trabalhos relacionados mais importantes. Dentro da seção sobre soluções
propostas introduziremos os atributos na ordem em que foram testados na nossa
pesquisa, tentando motivar cada um a partir da deficiência do anterior. Após a
descrição de cada atributo apresentaremos os resultados obtidos pela
Opacidade 2D com aquele atributo. Ao final do capítulo faremos conclusões em
cima dos resultados obtidos. A implementação do sistema usado para gerar os
resultados deste capítulo está descrita no capítulo sobre conceitos básicos.
3.1. Motivação
Ao tentar utilizar técnicas de visualização volumétrica direta em dados
sísmicos 3D podemos experimentar alguns problemas. Por exemplo, não existe
um modelo “a priori” para a função de transferência, como acontece para dados
médicos. No caso de dados médicos, de acordo com a aquisição utilizada,
existem tabelas que classificam os valores dos voxels, que em geral são valores
de densidade, em tipos de tecidos. Com isso, para dados médicos, o trabalho de
especificar uma função de transferência para visualização, seja ele de
tomografia computadorizada ou de ressonância magnética, pode ser bastante

Opacidade 2D 40
simplificado. Outro problema surge da própria natureza oscilatória dos dados
sísmicos. O caráter oscilatório tem como conseqüência a superposição dos
intervalos de amplitude dos eventos sísmicos. A Figura 17 ilustra o problema da
superposição dos intervalos de amplitudes de dois eventos positivos (picos) em
um traço sísmico.
127
0
-127
TEMPO
A
B
127
0
-127
TEMPO
A
B
Figura 17 - Superposição dos intervalos de amplitudes dos eventos sísmicos
O primeiro evento possui valores intermediários de amplitude, estes
valores estão compreendidos no intervalo “A”. O segundo evento possui valores
de amplitude mais alta, porém, o seu intervalo de valores se estende por todo o
conjunto de valores positivos de amplitude, desta forma o intervalo de amplitudes
do segundo evento se superpõe ao intervalo “A”. A região “B” destaca a
interseção entre os dois intervalos de amplitude, ou seja, todos os voxels do
segundo evento que possuem valores de amplitude dentro do intervalo de
amplitudes do primeiro evento. Uma função de transferência definida da maneira
usual para visualizar apenas o evento de amplitude intermediária associaria
valores de opacidade igual a um dentro do intervalo “A” e opacidade igual a zero
fora de “A”. A aplicação de tal função de transferência em um algoritmo de
visualização volumétrica daria como resultado uma imagem onde apareceriam
os voxels do evento de amplitude intermediária, porém nesta imagem também
estariam os voxels da região “B” da superposição dos dois eventos.
Para exemplificar o problema da superposição dos intervalos de amplitude
dos eventos utilizamos um dado sintético que simula uma estrutura de domo
(anticlinal). Este dado é o mesmo que foi utilizado para testes em (Gerhardt,
2001). Este dado foi obtido tomando-se um traço sísmico de um dado real e
replicando este traço lateralmente para gerar o dado 3D. Ao replicar o traço
lateralmente foram feitos deslocamentos na direção vertical para curvar os

Opacidade 2D 41
eventos em forma de domo. O dado apresenta um evento com amplitudes altas
(abaixo) e destaca dois eventos de interesse, evento “A” e evento “B”, com
amplitudes intermediárias. Chamaremos este dado de modelo domo. A Figura 18
mostra a visualização do modelo domo com todos os voxels opacos.
Evento “A”
Evento “B”
Evento com amplitudes altas
-127 0 127
Evento “A”
Evento “B”
Evento com amplitudes altas
-127 0 127-127 0 127 Figura 18 - Dado sintético simulando uma estrutura de domo (anticlinal).
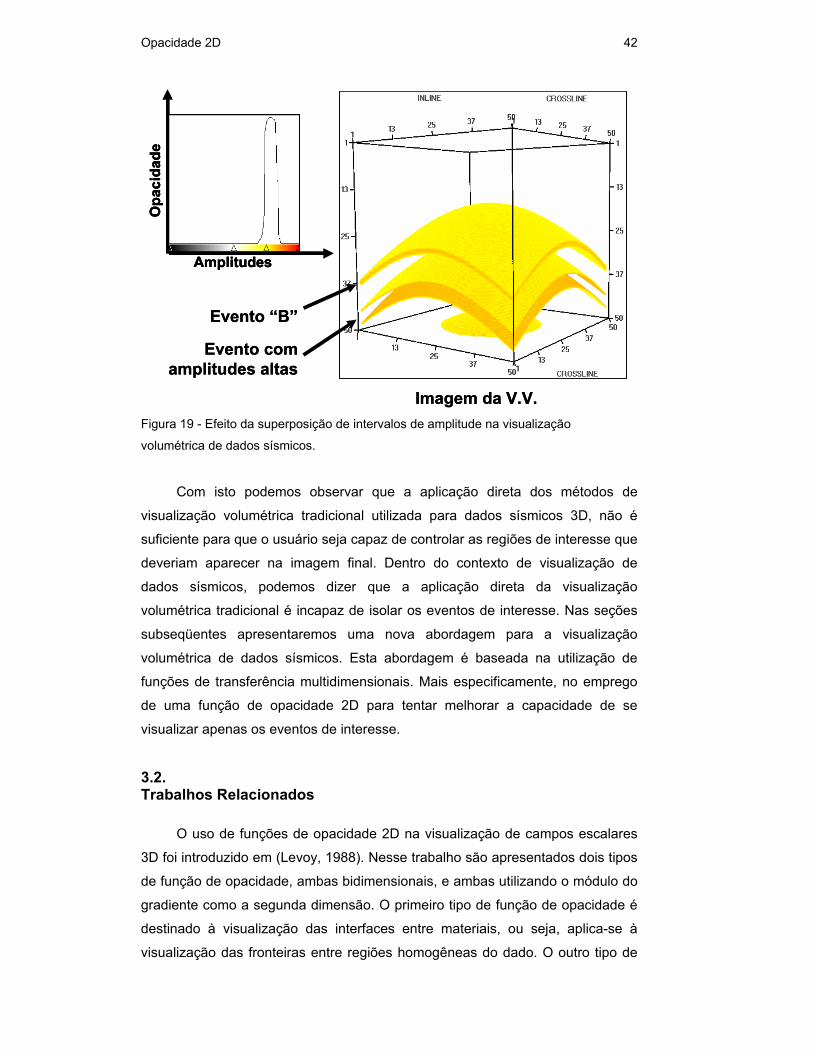
A Figura 19 mostra a imagem obtida na visualização volumétrica do
modelo domo. Esta imagem foi gerada na tentativa de visualizar apenas o
evento “B” (com amplitudes intermediárias). Foi utilizada a função de
transferência que aparece no canto superior esquerdo, a função aplica
opacidade igual a um para os valores de amplitude do evento “B” e opacidade
igual a zero para os valores de amplitude fora deste intervalo. Como o intervalo
de amplitudes do evento vizinho (com amplitudes mais altas) se sobrepõe ao
intervalo do evento “B”, podemos ver na parte inferior da imagem os voxels
referentes a essa região de interseção.
Opacidade 2D 42
Evento “B”
Evento com amplitudes altas
Amplitudes
Opa
cida
de
Imagem da V.V.
Evento “B”
Evento com amplitudes altas
Amplitudes
Opa
cida
de
Amplitudes
Opa
cida
de
Imagem da V.V. Figura 19 - Efeito da superposição de intervalos de amplitude na visualização
volumétrica de dados sísmicos.
Com isto podemos observar que a aplicação direta dos métodos de
visualização volumétrica tradicional utilizada para dados sísmicos 3D, não é
suficiente para que o usuário seja capaz de controlar as regiões de interesse que
deveriam aparecer na imagem final. Dentro do contexto de visualização de
dados sísmicos, podemos dizer que a aplicação direta da visualização
volumétrica tradicional é incapaz de isolar os eventos de interesse. Nas seções
subseqüentes apresentaremos uma nova abordagem para a visualização
volumétrica de dados sísmicos. Esta abordagem é baseada na utilização de
funções de transferência multidimensionais. Mais especificamente, no emprego
de uma função de opacidade 2D para tentar melhorar a capacidade de se
visualizar apenas os eventos de interesse.
3.2. Trabalhos Relacionados
O uso de funções de opacidade 2D na visualização de campos escalares
3D foi introduzido em (Levoy, 1988). Nesse trabalho são apresentados dois tipos
de função de opacidade, ambas bidimensionais, e ambas utilizando o módulo do
gradiente como a segunda dimensão. O primeiro tipo de função de opacidade é
destinado à visualização das interfaces entre materiais, ou seja, aplica-se à
visualização das fronteiras entre regiões homogêneas do dado. O outro tipo de

Opacidade 2D 43
função de opacidade é destinado à visualização de superfícies de nível em
dados com variação suave. Em (Kindlmann & Durkin, 1998; Kindlmann, 1999) é
apresentado um método semi-automático de geração de funções de opacidade
2D, usando a derivada na direção do gradiente como segunda dimensão, e
geração de funções de opacidade 3D acrescentando a segunda derivada,
também na direção do gradiente, como terceira dimensão. Em (Gerhardt et al.,
2001) fazemos uma adaptação da geração semi-automática de funções de
opacidade bidimensional à visualização de dados sísmicos 3D. Nesse trabalho
utilizamos a derivada do dado sísmico na direção do tempo (vertical) como
segunda dimensão. Nossa implementação atual é baseada em (Kniss, 2001).
Esse trabalho propõe elementos de interface com o usuário para manipulação de
funções de transferência multidimensionais, propõe também o uso de placas
gráficas programáveis e textura 3D na implementação destas funções. Nos
trabalhos citados até aqui é criada uma função de transferência preliminar
baseada em histogramas bidimensionais do campo vetorial, e em uma etapa
posterior a função de transferência pode ser editada para tentar se alcançar à
imagem desejada.
3.3. Soluções Propostas
A idéia central é estender o domínio da função de transferência para duas
dimensões, ou seja, os valores de cor e opacidade dependem de dois valores e
não mais de apenas um como usual. Os dados volumétricos, por sua vez, devem
armazenar dois valores por cada voxel. De certa forma passamos do problema
da visualização de um campo escalar para a visualização de um campo vetorial
(com vetores bidimensionais), no caso particular onde existe uma relação
conhecida entre as dimensões. Os resultados obtidos em (Gerhardt et al., 2001),
em dados sintéticos, confirmaram que a utilização da opacidade 2D aumenta a
capacidade de seleção de regiões de interesse. Porém esta técnica não
apresentou resultados significativos para dados reais. Por isso partimos para
uma abordagem mais adaptada à realidade da sísmica. Mantendo a amplitude
sísmica como primeira dimensão da função de opacidade, resolvemos
experimentar atributos sísmicos instantâneos como segunda dimensão.

Opacidade 2D 44
3.3.1. Amplitude Sísmica X Fase Instantânea
Em (Silva, 2003) descrevemos um método totalmente interativo para a
especificação de funções de opacidade 2D, onde o usuário define a função de
opacidade com o auxílio de um histograma também bidimensional do dado. Este
método utiliza como segunda dimensão o atributo sísmico de fase instantânea. O
atributo de fase instantânea pode ser calculado a partir da amplitude sísmica
( )X t de cada traço sísmico como.
( )X t (5)
Primeiro calculamos a função ( )Y t que é a transformada de Hilbert dos
valores de amplitude do traço sísmico ( )X t . De maneira simplificada podemos
dizer que a transformada de Hilbert de uma função é o resultado da convolução
desta função com o núcleo de Hilbert (mais detalhes no Apêndice A).
( ) ( ) ( )Y t h t X t= ∗ (6)
Em seguida definimos o traço analítico (ou traço complexo) como sendo a
função complexa ( )Z t , com parte real igual a ( )X t e parte imaginária igual a
( )Y t .
( ) ( ) ( )Z t X t iY t= + (7)
Tomando a forma polar do traço analítico obtemos a função real do atributo
de envelope (ou amplitude instantânea) ( )A t e a função real de fase instantânea
( )tθ , como na eq.(8).
( )( ) ( ) i tZ t A t e θ= (8)
2 2( ) ( ) ( )A t X t Y t= + (9)
1 ( )( ) tan( )
Y ttX t
θ − =
(10)

Opacidade 2D 45
Portanto o atributo de fase instantânea pode ser calculado como o
argumento complexo do traço analítico. A Figura 20 mostra os gráficos das
funções de amplitude e fase instantânea de um traço sísmico de um dado real.
-4
-3
-2
-1
0
1
2
3
4
1 7 13 19 25 31 37 43 49 55 61 67 73 79 85 91 97 103 109 115 121
Amplitude Fase instantânea-4
-3
-2
-1
0
1
2
3
4
1 7 13 19 25 31 37 43 49 55 61 67 73 79 85 91 97 103 109 115 121
-4
-3
-2
-1
0
1
2
3
4
1 7 13 19 25 31 37 43 49 55 61 67 73 79 85 91 97 103 109 115 121
Amplitude Fase instantâneaAmplitude Fase instantânea
Figura 20 - Amplitude sísmica e fase instantânea de um traço sísmico real
Os valores do atributo sísmico de fase instantânea estão compreendidos
no intervalo [−π ,π ]. Na Figura 20 observamos que onde o gráfico da função de
fase instantânea cruza o eixo do tempo, isto é, assume o valor zero temos um
máximo local com valores positivos na função de amplitude sísmica. Como um
máximo local com valores positivos de amplitude dentro de um traço sísmico
representa um evento sísmico concluímos que o atributo de fase instantânea é
um bom indicador de eventos sísmicos. As linhas tracejadas no gráfico da
função de fase instantânea representam os pontos onde a função salta de π
para -π .
3.3.1.1. Resultados
A Figura 21 mostra (do lado esquerdo) uma função de transferência
bidimensional definida em cima do histograma, também bidimensional, de
Amplitudes versus Fase Instantânea. O histograma bidimensional foi obtido a
partir do dado do domo sintético, usado como primeira dimensão (eixo horizontal
da figura), e calculando o volume do atributo sísmico de fase instantânea, usado
como segunda dimensão (eixo vertical da figura). Ambos os volumes foram
quantizados para 8-bits e a ocorrência dos pares foi computada no histograma.

Opacidade 2D 46
As freqüências (ocorrências) são apresentadas na figura em tons de cinza, em
preto para os pares com maior ocorrência, branco para nenhuma ocorrência e os
tons de cinza para ocorrências intermediárias. Em cima do histograma está
representada a função de transferência bidimensional definida pelo usuário. A
opacidade 2D está definida com o valor 1 dentro do retângulo e zero fora do
mesmo. As cores da função de transferência dependem apenas do valor da
primeira dimensão do dado, ou seja, a cor depende apenas do valor de
amplitude do voxel, como mostra o esquema de cores situado abaixo do
histograma bidimensional.
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
ias
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
ias
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
ias
Figura 21 - Função de transferência 2D (esquerda) e visualização volumétrica do dado
do Domo (direita).
Do lado direito da Figura 21 temos o resultado da visualização volumétrica
com a função de opacidade 2D mostrada do lado esquerdo. Os voxels que
aparecem na visualização são aqueles cujos valores de amplitude e fase
instantânea estão dentro da região indicada pelo retângulo. Este retângulo
representa a região onde a amplitude é positiva e a fase instantânea é próxima
de zero. Como foi observado anteriormente é na vizinhança dos picos que o
valor da fase instantânea vai para zero. Portanto temos todos os eventos com
valores de amplitude positiva do dado identificados na imagem. Podemos agora
utilizar uma outra função de opacidade 2D que torne visíveis apenas os voxels
do evento sísmico de interesse “B” da Figura 18. Tal função de opacidade 2D
pode ser construída utilizando um retângulo menor que limite os valores de
amplitude aos valores encontrados no evento “B”.
A Figura 22 mostra (do lado esquerdo) a função de opacidade 2D usada
para isolar o evento sísmico “B” de amplitudes intermediárias mostrado na figura

Opacidade 2D 47
5. Do lado direito da figura 8 vemos a visualização volumétrica do evento “B”
sem a interferência do evento de amplitudes altas situado logo abaixo. Com isso
mostramos que a utilização da opacidade 2D combinando amplitude sísmica e
fase instantânea foi capaz de solucionar o problema causado pela superposição
de intervalos de amplitude dos eventos sísmicos, para o dado do domo sintético.
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
ias
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
ias
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
ias
Figura 22 - Evento de interesse isolado graças a opacidade 2D. Função de transferência
(esquerda) e visualização volumétrica do evento (direita).
No caso de um dado sísmico real a dificuldade de isolar eventos é ainda
maior. O dado do domo sintético utilizado anteriormente possui uma
particularidade que raramente pode ser encontrada em um dado sísmico real,
este dado não possui variação lateral das amplitudes das amostras que
compõem o centro do evento, ou seja, os valores de amplitude praticamente são
constantes nas amostras que estão próximas dos máximos (ou mínimos) locais.
A Figura 23 mostra um volume de dados real onde naturalmente há variação
lateral de amplitudes. Do lado esquerdo é mostrada a visualização volumétrica
do dado utilizando uma função de opacidade igual a um para todos os valores e
uma tabela de cores definida para realçar a variação de valores positivos. Do
lado direito estão destacados dois eventos vizinhos, em ambos os eventos a
variação lateral de amplitudes positivas é visível. No evento situado acima
podemos observar uma predominância de amplitudes positivas altas (amostras
em vermelho) enquanto no evento situado mais abaixo há uma predominância
de amplitudes positivas intermediárias (amostras em verde). Novamente aqui,
como na experiência realizada com o dado sintético, queremos visualizar
isoladamente o evento de amplitudes intermediárias.

Opacidade 2D 48
Figura 23 - Volume de dados real (esquerda). Eventos sísmicos reais destacados
(direita).
Na Figura 24 comparamos o resultado da visualização volumétrica
utilizando opacidade 1D aplicada a um dado real com o resultado da opacidade
2D aplicada ao mesmo dado real. Na porção superior da figura estão a função
de transferência 1D usada na visualização (centro) e o resultado da visualização
(direita). A função de opacidade 1D foi construída atribuindo opacidade igual a
um para os valores de amplitude intermediária que correspondem aos valores de
amplitude do evento de interesse, e zero para os demais valores. Assim como
para o dado sintético, utilizando apenas a opacidade 1D baseada nos valores de
amplitudes não é possível remover totalmente o evento de amplitudes mais
altas. Ainda estão presentes na imagem obtida com a opacidade 1D os voxels
de amplitudes intermediárias que estão na vizinhança do evento de amplitudes
predominantemente altas. Estes voxels obstruem a visualização do evento de
interesse. Na parte inferior da Figura 24 vemos a função de transferência 2D
utilizada (centro) e a imagem obtida na visualização volumétrica (direita). A
função de opacidade 2D foi definida com valores iguais para os valores de
amplitude e fase dentro do retângulo destacado e zero fora dele. Este retângulo
delimita a região do plano: Amplitude X Fase instantânea, onde, a fase
instantânea é próxima de zero e os valores de amplitude estão na faixa de
amplitudes intermediárias, que compreende os valores de amplitude do evento
de interesse. A imagem resultante da aplicação da opacidade 2D mostra que a
maior parte do evento de amplitudes altas foi removida. A parte que foi removida
corresponde exatamente aos voxels com valores mais altos de amplitude
sísmica. Como ambos os eventos possuem uma certa variação lateral de valores

Opacidade 2D 49
de amplitude, boa parte do evento de ainda fica visível e uma porção do evento
de interesse situada no centro foi removida como pode ser verificado na imagem
resultante. Com isso concluímos que a utilização da opacidade 2D em dados
sísmicos reais também se mostrou mais eficiente que a abordagem tradicional
com opacidade 1D.
Amplitude
Opa
cida
de
Opacidade1D
Amplitude
Opa
cida
de
Amplitude
Opa
cida
de
Opacidade1D
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
iasOpacidade
2D
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
ias
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
iasOpacidade
2D
Figura 24 - Função de opacidade 1D aplicada a um dado sísmico real (acima). Função
de opacidade 2D aplicada a um dado sísmico real (abaixo).
3.3.2. Amplitude Sísmica X Fase Ajustada
Apesar de resolver, de certa forma, o problema da superposição dos
intervalos de amplitude dos eventos sísmicos, a opacidade 2D definida no
domínio Amplitude Sísmica X Fase Instantânea, como foi descrito, possui uma
deficiência na visualização de eventos de amplitudes negativas, ou seja, eventos
definidos por mínimos locais na curva de amplitudes sísmicas. Esta deficiência é
decorrente do fato da função do atributo de fase instantânea ser descontínua.
Como foi visto na Figura 20, a função de fase instantânea possui pontos de
descontinuidade que coincidem com os mínimos locais da função de amplitude
sísmica. Deste modo os eventos de amplitude sísmica negativas aparecem no
histograma 2D (de Amplitude X Fase) distribuídos em torno das retas: Fase = π

Opacidade 2D 50
e Fase = -π . Na verdade, Fase = π e Fase = -π , são uma única reta já que π
e –π representam o mesmo valore de fase instantânea. Portanto a topologia
correta para representar o histograma 2D de Amplitude X Fase é a topologia de
um cilindro obtido identificando-se as retas: Fase = π e Fase = -π .
O salto de π para –π dado pela fase instantânea acarreta, pelo menos,
dois problemas na visualização de dados sísmicos 3D utilizando opacidade 2D.
O primeiro problema, não tão grave, está na especificação da função de
opacidade feita pelo usuário no caso do evento de interesse ser um evento de
amplitudes negativas. Como os eventos de amplitude sísmica negativas
aparecem divididos em torno das duas retas o usuário é obrigado a definir uma
região desconexa para selecionar o evento, isto é, o usuário é obrigado a definir
duas áreas (retângulos) para selecionar um único evento, o que torna a tarefa
menos intuitiva. O segundo problema reside na interpolação do dado
volumétrico, o que afeta diretamente o cerne dos algoritmos de visualização de
dados volumétricos, inclusive a utilização da opacidade 2D.
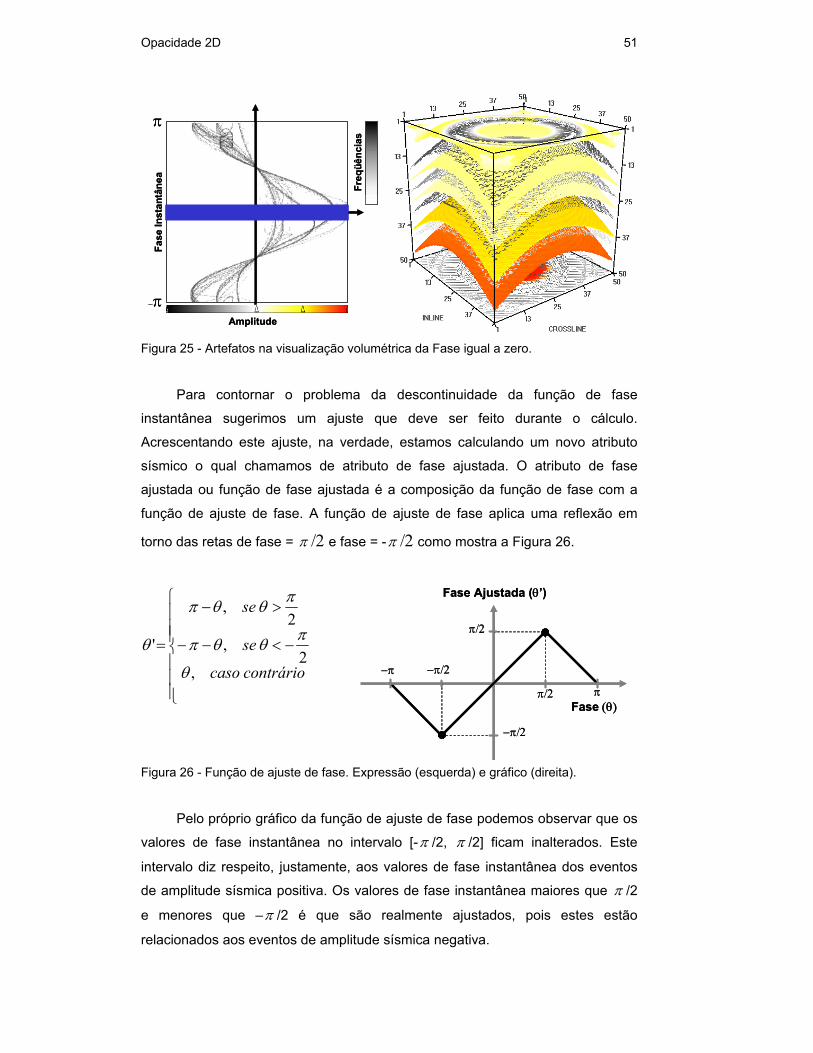
A Figura 25 mostra o problema da descontinuidade da fase instantânea na
visualização volumétrica. Do lado esquerdo está a função de transferência 2D
usada na visualização. Esta função foi definida com valores de opacidade um
dentro do retângulo azul e zero fora dele. A escala de cores está associada com
a primeira dimensão que é a amplitude sísmica. A segunda dimensão utilizada é
a fase instantânea. Fica evidente a existência de artefatos na imagem resultante,
pois a superfície de nível de fase instantânea igual a zero não contem voxels
com valores negativos, ou seja, todos os voxels que aparecem em tons de cinza
na imagem são artefatos. Em torno dos eventos negativos existem voxels
adjacentes um com valor de fase igual a π e outro com valor igual a –π . Ao
utilizar a opacidade 2D para selecionar os voxels com fase instantânea próxima
de zero deveríamos estar visualizando apenas voxels com valor de amplitude
sísmica positivos, porém na visualização volumétrica direta a interpolação do
dado introduz artefatos (voxels com amplitude negativa) na vizinhança dos
mínimos locais onde a fase salta de –π para π .
Opacidade 2D 51
π/2 π
−π −π/2
π/2
−π/2
Fase (θ)
Fase Ajustada (θ’)
π/2 π
−π −π/2
π/2
−π/2
Fase (θ)
Fase Ajustada (θ’)
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
ias
Amplitude
Fase
Inst
antâ
nea
π
−π
Freq
üênc
ias
Figura 25 - Artefatos na visualização volumétrica da Fase igual a zero.
Para contornar o problema da descontinuidade da função de fase
instantânea sugerimos um ajuste que deve ser feito durante o cálculo.
Acrescentando este ajuste, na verdade, estamos calculando um novo atributo
sísmico o qual chamamos de atributo de fase ajustada. O atributo de fase
ajustada ou função de fase ajustada é a composição da função de fase com a
função de ajuste de fase. A função de ajuste de fase aplica uma reflexão em
torno das retas de fase = π /2 e fase = -π /2 como mostra a Figura 26.
Figura 26 - Função de ajuste de fase. Expressão (esquerda) e gráfico (direita).
Pelo próprio gráfico da função de ajuste de fase podemos observar que os
valores de fase instantânea no intervalo [-π /2, π /2] ficam inalterados. Este
intervalo diz respeito, justamente, aos valores de fase instantânea dos eventos
de amplitude sísmica positiva. Os valores de fase instantânea maiores que π /2
e menores que –π /2 é que são realmente ajustados, pois estes estão
relacionados aos eventos de amplitude sísmica negativa.
−<−−
>−
=
contráriocaso
se
se
,2
,2
,
'
θ
πθθπ
πθθπ
θ

Opacidade 2D 52
A Figura 27 mostra, do lado esquerdo, uma função de opacidade 2D que
atribui opacidade igual a um aos voxels com valor de fase instantânea próximo
de zero, independente do valor de amplitude. Do lado direito da figura vemos a
mesma função e transferência porem, definida em cima do histograma 2D de
Amplitude X Fase ajustada. Podemos observar na figura que os eventos de
amplitude sísmica negativas que apareciam, no histograma 2D de Amplitude X
Fase instantânea, em torno das retas fase = π e fase = -π agora aparecem, no
histograma 2D de Amplitude X Fase ajustada, em torno da reta fase igual a zero.
Portando, tanto os eventos positivos quanto os negativos ocorrem na vizinhança
de fase ajustada igual a zero. Com o uso da fase ajustada como segunda
dimensão, na visualização volumétrica com opacidade 2D, conseguimos
contornar o problema do aparecimento de artefatos.
Amplitude
Fase
Inst
antâ
nea
π
−πFr
eqüê
ncia
sAmplitude
Fase
Aju
stad
a
π/2
−π/2
Figura 27 - Histogramas 2D de Amplitude X Fase Instantânea (esquerda) e Amplitude X
Fase Ajustada (direita).
3.3.2.1. Resultados
Na Figura 28 comparamos os resultados obtidos usando fase instantânea
e fase ajustada na opacidade 2D. Na parte superior da figura temos, do lado
esquerdo, a função de transferência 2D definida em cima do histograma 2D de
amplitude sísmica e fase instantânea. Do lado direito temos a imagem da
visualização volumétrica com opacidade 2D usando esta função de
transferência. Nesta imagem podemos observar os artefatos (voxels em azul)
criados pela descontinuidade da fase instantânea.

Opacidade 2D 53
Figura 28 – Comparação entre Fase Instantânea e Fase Ajustada.
Na parte inferior da Figura 28, do lado esquerdo, vemos a função de
transferência definida em cima do histograma 2D de amplitude sísmica X fase
ajustada. Esta função define opacidade um apenas para os voxels com valor de
fase ajustada próximo de zero independente do valor de amplitude sísmica. Do
lado direito temos a imagem da visualização volumétrica com opacidade 2D do
dado. Podemos observar que esta imagem não apresenta artefatos oriundos da
interpolação já que a fase ajustada é contínua.
O fato da função de fase ajustada colapsar os eventos positivos e
negativos em torno do zero, ou seja, tanto as amostras dos eventos positivos
quanto as amostras dos eventos negativos possuem fase ajustada próxima de
zero, não cria um novo problema para a visualização volumétrica com opacidade
2D, pois ainda podemos separá-los pelo valor da amplitude sísmica como mostra
a Figura 29.
Amplitude
Fase
Aju
stad
aFa
se In
stan
tâne
a
π
−πAmplitude
Amplitude
Fase
Aju
stad
a
Amplitude
Fase
Aju
stad
aFa
se In
stan
tâne
a
π
−πAmplitude
Fase
Inst
antâ
nea
π
−πAmplitude

Opacidade 2D 54
Amplitude
Fase
Aju
stad
a
Amplitude
Fase
Aju
stad
a
Amplitude
Fase
Aju
stad
a
Amplitude
Fase
Aju
stad
a
Amplitude
Fase
Aju
stad
a
Amplitude
Fase
Aju
stad
a
Figura 29 – Visualização volumétrica dos eventos positivos e negativos separadamente
usando a fase ajustada.
Na parte superior da Figura 29 vemos, do lado esquerdo, a função de
transferência que seleciona os voxels com fase ajustada próxima de zero e
amplitude sísmica positiva, que representam os eventos de amplitude positiva.
Do lado direito temos a visualização volumétrica com opacidade 2D usando
amplitude sísmica e fase ajustada. Na parte inferior da figura temos, do lado
esquerdo, a função de transferência associa opacidade igual a um aos voxels
com fase ajustada próxima de zero e amplitude sísmica negativa, este conjunto
equivale aos eventos de amplitude negativa. Do lado direito temos a visualização
volumétrica com opacidade 2D usando esta função de transferência. Na imagem
estão apenas os eventos de amplitude negativa do modelo.
Com isso mostramos que a fase ajustada é um atributo mais apropriado
para ser usado em conjunto com a amplitude sísmica na opacidade 2D, uma vez
que não temos problema na visualização de eventos de amplitude negativa.

Opacidade 2D 55
3.3.3. Amplitude Sísmica X Fase Desenrolada
Para dados sísmicos reais a estratégia de visualização volumétrica com
opacidade 2D, tanto utilizando fase instantânea quanto fase ajustada, mostrou-
se eficiente para separar os horizontes sísmicos do restante do dado. Porém,
quando necessitamos de isolar um evento específico dos demais isso nem
sempre é possível. Dentro dessas duas abordagens só conseguimos
individualizar um evento no caso em que seus voxels possuem valores de
amplitude dentro de um intervalo disjunto do intervalo de amplitudes dos voxels
dos demais eventos.
Na tentativa de melhorar a capacidade de individualizar um único horizonte
sísmico na visualização volumétrica fizemos um estudo em (Gerhardt et al, 2004)
da aplicação do atributo de fase desenrolada1 como segunda dimensão na
opacidade 2D. A abordagem usando a fase desenrolada é uma extensão natural
da abordagem usando fase instantânea sugerida em (Silva et al, 2003). Em
(Stark, 2003) o desenrolamento da fase é apresentado como um método para
obter um volume de tempos para as amostras, neste volume de tempos
relativos, segundo o autor, os horizontes se apresentam como superfícies de
valor constante. A fase instantânea obtida a partir do traço complexo é medida
módulo 2π , como foi definido na eq. (10). A fase instantânea medida módulo
2π também é conhecida como VP (valor principal). A fase desenrolada φ pode
assumir qualquer valor real e pode ser obtida adicionando-se múltiplos de 2π à
fase instantânea. Na eq. (11) temos a formulação 1D do problema de desenrolar
a fase instantânea.
( ) ( ) 2 ( ) ( )t t n t n tφ θ π= + ∴ ∈ (11)
O valor ( )n t é chamado de índice de rotação ou número de voltas. Os
algoritmos de desenrolar fase trabalham naturalmente na versão discreta do
problema procurando por uma função de índices de rotação que tornem a fase
desenrolada contínua ou, pelo menos minimizem as suas descontinuidades. O
algoritmo de Itoh (Ghiglia & Pritt, 1998) é um método de desenrolar fase em 1D
1 Usamos a expressão fase desenrolada como tradução para a expressão em
inglês Unwrapped Phase.

Opacidade 2D 56
que o faz integrando a derivada da fase instantânea. AFigura 30 mostra o
resultado do algoritmo de Itoh aplicado a um traço sísmico real.
Figura 30 – Fase desenrolada em 1D.

Opacidade 2D 57
Os principais problemas que podem comprometer os algoritmos de
desenrolamento de fase são: a presença de ruído no sinal de fase instantânea e
o aliasing causado pela amostragem pobre do sinal. Podemos encontrar na
literatura várias versões de métodos de desenrolamento de fase em 2D (Ghiglia
& Pritt, 1998; Spagnolini, 1993). A partir da dimensão dois o problema de
desenrolar fase torna-se um problema variacional e sua solução depende da
integração do gradiente do campo escalar de fase instantânea. Sob certas
condições essa integral pode ser calculada de forma independente do caminho
(Ghiglia & Pritt, 1998). Um dos métodos de desenrolamento de fase em 2D, que
pode ser facilmente estendido para um espaço N-dimensional, é o método
baseado em mapa de qualidade. Este algoritmo define uma função que atribui
um valor de qualidade (número real) a cada amostra do campo escalar de fase
instantânea, mapa de qualidade. Em seguida encontramos a amostra com maior
valor de qualidade. A partir daí é utilizada uma estratégia do tipo de crescimento
de região. A cada passo encontramos a amostra da vizinhança da região atual,
com maior valor de qualidade. Esta amostra é acrescentada à região. Em
(Ghiglia & Pritt, 1998) são comparados vários mapas de qualidade 2D.
Com o atributo de fase desenrolada calculado para um dado sísmico
podemos utilizar a estratégia de opacidade 2D e individualizar um único evento
na visualização volumétrica. Isso se deve ao fato de que, assim como na fase
instantânea, um horizonte é uma superfície de nível do atributo de fase
desenrolada. Além disso, no atributo de fase instantânea todos os horizontes
formam uma única superfície de nível, a saber ( , , ) 0t x yθ = , como foi visto,
porém no atributo de fase desenrolada cada horizonte é uma superfície de nível
diferente. Na seção seguinte mostraremos os resultados obtidos utilizando a
estratégia de opacidade 2D com amplitude sísmica como primeira dimensão e
fase desenrolada como segunda dimensão.
3.3.3.1. Resultados
A Figura 31 ilustra a fase desenrolada bidimensional. Da esquerda para a
direita temos: uma seção transversal (inline) do dado do domo sintético, com os
valores de amplitude sísmica desta seção; os valores do atributo de fase
instantânea da seção; os valores do atributo de fase desenrolada da seção,
esses valores estão expressos em radianos; por fim, os valores dos índices de
rotação da seção. Esta imagem foi obtida aplicando o algoritmo de

Opacidade 2D 58
desenrolamento da fase em 3D ao modelo do domo. Na imagem da fase
instantânea podemos observar que as descontinuidades (saltos de π para π− )
coincidem com os eventos de amplitudes negativas do dado. Também podemos
observar que a fase desenrolada é contínua na seção. Assim como em 1D a
função de índice de rotação divide o domínio em regiões onde o índice de
rotação é constante, as fronteiras entre estas regiões também coincidem com as
descontinuidades (saltos) da função de fase instantânea. Alguns algoritmos de
desenrolamento de fase operam identificando estas fronteiras, porém em dados
reais essa identificação quase sempre é impraticável.
-0.958 0 0.958-0.958 0 0.958 -π +π0-π +π0 1.58− 32.251.58− 32.25 0 1 2 3 4 50 1 2 3 4 5 Figura 31 – Fase desenrolada em 2D. Dado sintético.
Na Figura 32 vemos o desenrolamento da fase aplicado a um dado real.
Esta figura também foi obtida da aplicação do algoritmo de desenrolamento de
fase em 3D ao dado. Na figura vemos uma seção transversal (crossline) do dado
real 3D. Na parte superior esquerda temos a imagem dos valores de amplitude
da seção. Nesta imagem podemos observar que a estrutura geológica da região
é relativamente complexa, contendo falhas geológicas e regiões com bastante
ruído. Na parte superior direita temos a imagem dos valores de fase instantânea
da seção. Nesta imagem podemos observar que as descontinuidades da fase
instantânea não formam um padrão bem comportado a ponto de podermos
utilizá-las para delimitar regiões onde o índice de rotação é constante. Na parte
inferior esquerda temos a imagem dos valores da fase desenrolada da seção.
Nesta imagem podemos observar que as curvas de nível da imagem de
acompanham, até certo ponto, o comportamento da geologia. Porém
examinando com mais cuidado, podemos constatar que estas curvas de nível
não mantêm uma relação um para um com os horizontes sísmicos como é
desejável.
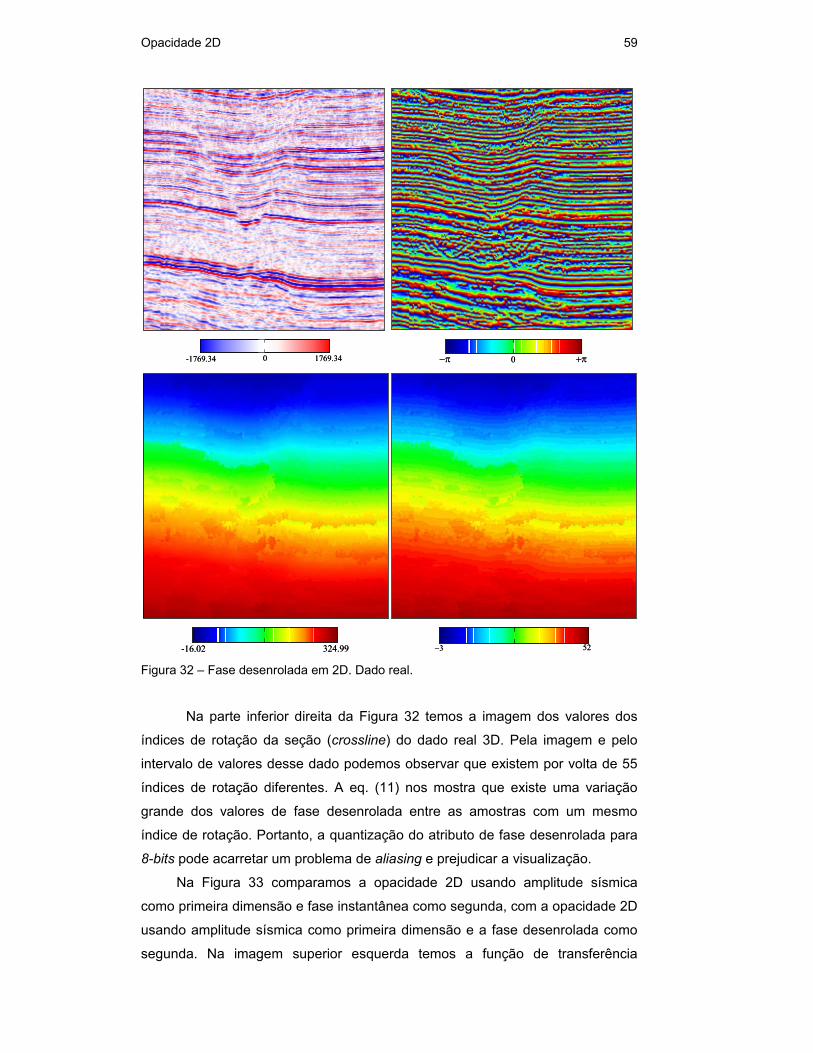
Opacidade 2D 59
0-1769.34 1769.340-1769.34 1769.34 0−π +π0−π +π
-16.02 324.99-16.02 324.99 3− 523− 52 Figura 32 – Fase desenrolada em 2D. Dado real.
Na parte inferior direita da Figura 32 temos a imagem dos valores dos
índices de rotação da seção (crossline) do dado real 3D. Pela imagem e pelo
intervalo de valores desse dado podemos observar que existem por volta de 55
índices de rotação diferentes. A eq. (11) nos mostra que existe uma variação
grande dos valores de fase desenrolada entre as amostras com um mesmo
índice de rotação. Portanto, a quantização do atributo de fase desenrolada para
8-bits pode acarretar um problema de aliasing e prejudicar a visualização.
Na Figura 33 comparamos a opacidade 2D usando amplitude sísmica
como primeira dimensão e fase instantânea como segunda, com a opacidade 2D
usando amplitude sísmica como primeira dimensão e a fase desenrolada como
segunda. Na imagem superior esquerda temos a função de transferência

Opacidade 2D 60
definida sobre o histograma 2D de amplitude sísmica e fase instantânea. Na
parte superior direita vemos a visualização volumétrica do dado sintético usando
esta função de transferência.
+π-π
Am
plitu
des
Fase Instantânea
Freq
üênc
ias
-0.96
0.96
+π-π
Am
plitu
des
Fase Instantânea
Freq
üênc
ias
-0.96
0.96
Am
plitu
des
Fase Desenrolada
Freq
üênc
ias
-0.96
0.96
-1.58 32.25
Am
plitu
des
Fase Desenrolada
Freq
üênc
ias
-0.96
0.96
-1.58 32.25
Figura 33 – Comparação da opacidade 2D com fase instantânea e fase desenrolada.
Dado sintético.
Na parte inferior da Figura 33 temos, do lado esquerdo, a função de
transferência definida em cima do histograma 2D de amplitude sísmica e fase
desenrolada do dado sintético do domo, e do lado direito temos a visualização
volumétrica do dado sintético do domo utilizando esta função de transferência.
Enquanto no histograma 2D de amplitude sísmica e fase instantânea as
amostras dos horizontes aparecem aglomerados, i.e., as amostras referentes a
todos os horizontes de amplitudes positivas estão em torno da reta 0θ = , no
histograma 2D de amplitude sísmica e fase desenrolada as amostras estão em
uma curva que se assemelha ao próprio traço sísmico.

Opacidade 2D 61
Na Figura 34 comparamos os resultados obtidos aplicando a opacidade 2D
a um dado real, usando a fase instantânea e usando a fase desenrolada como
segunda dimensão. Na parte superior temos: do lado esquerdo, uma função de
transferência definida sobre o histograma 2D de amplitude sísmica e fase
instantânea; do lado direito, a visualização volumétrica usando esta função de
transferência. Na imagem do histograma 2D de amplitude sísmica e fase
instantânea vemos que as amostras dos horizontes positivos aglomeram-se em
torno do segmento de reta fase = 0 e amplitude sísmica > 0. Por isso não
conseguimos distinguí-los entre si. Na parte inferior da Figura 34 temos: do
esquerdo, uma função de transferência definida sobre o histograma 2D de
amplitude sísmica e fase desenrolada; do lado direito, a visualização volumétrica
usando esta função de transferência. Com a opacidade 2D utilizando a fase
desenrolada como segunda dimensão conseguimos individualizar um horizonte.
-π
Am
plitu
des
Fase Instantânea
Freq
üênc
ias
+π-1769
1769
-π
Am
plitu
des
Fase Instantânea
Freq
üênc
ias
+π-1769
1769
Am
plitu
des
Fase Desenrolada
Freq
üênc
ias
-16.02 325.01-1769
1769
Am
plitu
des
Fase Desenrolada
Freq
üênc
ias
-16.02 325.01-1769
1769
Figura 34 – Comparação da opacidade 2D com fase instantânea e fase desenrolada.
Dado real.

Opacidade 2D 62
3.4. Conclusões Parciais
Neste capítulo concluímos que o atributo sísmico de fase instantânea é
uma boa opção para ser usada como segunda dimensão na abordagem de
opacidade 2D, devido a sua já conhecida característica de ser um bom indicador
de continuidade para horizontes sísmicos. Com a opacidade 2D definida sobre a
amplitude sísmica e a fase instantânea conseguimos isolar os horizontes
sísmicos positivos do restante do dado.
Porém, devido ao fato da fase instantânea ser um atributo sísmico
descontínuo, i.e., possuir saltos de π para π− , e esses saltos estarem
localizados exatamente nos horizontes sísmicos negativos, concluímos que a
fase instantânea não serve para ser usada como segunda dimensão na
opacidade 2D, no caso da visualização de horizontes sísmicos negativos.
O atributo de fase ajustada sugerido nas seções anteriores é uma solução
para contornar o problema da descontinuidade da fase instantânea na
visualização de horizontes negativos. Com a opacidade 2D definida sobre a
amplitude sísmica e a fase ajustada conseguimos isolar os horizontes positivos e
também os horizontes negativos do restante do dado. Além disso, conseguimos
separa os horizontes positivos dos negativos.
Quando dois horizontes possuem intervalos de amplitude que se
intersectam nem usando a fase instantânea nem a fase ajustada na opacidade
2D conseguimos distinguir estes eventos. Para tal feito o atributo de fase
desenrolada se apresenta como uma opção mais apropriada. Mais do que isso,
para podermos visualizar isoladamente cada horizonte de um dado sísmico 3D
basta ter o atributo de fase desenrolada corretamente calculado.

Iluminação de Dados Sísmicos 63
4 Iluminação de Dados Sísmicos
Neste capítulo enunciaremos alguns dos problemas encontrados na
visualização volumétrica direta de dados sísmicos, mais especificamente na
etapa de iluminação, e apresentaremos uma solução para estimar a orientação
local dos horizontes em cada voxel do dado. Na seção seguinte apresentaremos
a motivação para a pesquisa feita. Na seção 4.2 destacaremos alguns trabalhos
relacionados. Na seção 4.3 apresentaremos a nossa solução. Na seção 4.4
apresentaremos os resultados obtidos usando nossa abordagem para dados
sintéticos e reais. Ao final do capítulo faremos considerações sobre os
resultados obtidos. A implementação do sistema usado para gerar os resultados
deste capítulo está descrita no capítulo sobre conceitos básicos.
4.1. Motivação
O efeito da iluminação em um ambiente traz para o observador
informações muito importantes sobre a geometria e a topologia dos objetos
contidos neste ambiente. Por isso, na grande maioria dos métodos de síntese de
imagens conhecidos na computação gráfica, a etapa de iluminação tem um
papel importante no que diz respeito ao realismo e na sensação de
tridimensionalidade das imagens resultantes. No caso da visualização de dados
sísmicos 3D não é diferente, a iluminação pode acrescentar bastante informação
visual revelando detalhes estruturais, geometria e topologia aparente dos
eventos sísmicos. Porém, como já foi observado em trabalhos anteriores
(Gerhardt, 1998), a aplicação direta das técnicas de visualização volumétrica
direta, comumente utilizadas em dados de origem médicas, em dados sísmicos
resulta em imagens onde os eventos são iluminados erradamente.
Para ilustrar o problema da iluminação de dados sísmicos 3D
consideraremos inicialmente um modelo sintético simples de camadas planas
horizontais. Esse modelo simples chamado de modelo plano foi obtido a partir
de um único traço de um dado real. Para gerar o modelo plano tomamos este

Iluminação de Dados Sísmicos 64
traço sísmico real, e replicamos este traço lateralmente sem deslocá-lo na
vertical.
Seja )(0 tX a função que representa o traço gerador do modelo plano, i.e.,
a função que representa a variação da amplitude sísmica ao longo do traço. A
Figura 35 mostra o gráfico da função )(0 tX , nela estão destacados os eventos
(pontos de máximo e de mínimo) do traço.
-0,8-0,6-0,4-0,2
00,20,40,60,8
11,2
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 50
- Traço gerador do modelo plano
Am
plitu
de S
ísm
ica
T
)(0 tX
-0,8-0,6-0,4-0,2
00,20,40,60,8
11,2
-0,8-0,6-0,4-0,2
00,20,40,60,8
11,2
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 501 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 50
- Traço gerador do modelo plano
Am
plitu
de S
ísm
ica
T
)(0 tX
Figura 35 - Traço gerador do modelo domo com os eventos destacados.
A partir da função )(0 tX podemos definir o campo escalar de amplitudes
sísmicas do modelo plano como na eq. (12) abaixo.
0( , , ) ( )X t x y X t= (12)
Este dado sintético representa um dos modelos geológicos mais simples
que é um conjunto de camadas horizontais, planas e sem variação lateral
amplitudes. A Figura 36 mostra a visualização volumétrica do dado do modelo
plano.

Iluminação de Dados Sísmicos 65
-0.95 0 0.95-0.95 0 0.95 Figura 36 – Visualização volumétrica do modelo plano.
Os métodos de visualização volumétrica direta em geral utilizam modelos
locais para calcular a iluminação em cada voxel do volume. Os modelos locais
de iluminação, por sua vez, calculam a intensidade da iluminação em um ponto
de uma superfície como função do vetor normal da superfície naquele ponto. O
modelo de iluminação local mais utilizado é o modelo de Phong (Phong, 1975).
No caso da visualização de um dado volumétrico, o gradiente do campo escalar
é utilizado para aproximar o vetor normal de cada voxel.
Tomando o gradiente do campo escalar de amplitudes sísmicas do modelo
plano obtemos o campo vetorial descrito na eq. (13):
0 ( )( , , ) , , ,0,0X tX X XX t x yt x y t
∂∂ ∂ ∂ ∇ = = ∂ ∂ ∂ ∂ (13)
Da eq.(13) podemos observar que nos máximos e mínimos locais da
função geradora )(0 tX a derivada 0 ( )X t t∂ ∂ é zero e conseqüentemente o
gradiente é nulo. Portando, exatamente nos eventos sísmicos o gradiente é nulo
e o vetor normal não está bem definido. Por isso, as imagens obtidas por
visualização volumétrica direta do modelo plano são iluminadas incorretamente
como pode ser visto na Figura 37. Nesta figura temos imagens obtidas variando
o ângulo de incidência entre a direção da iluminação e a normal dos horizontes
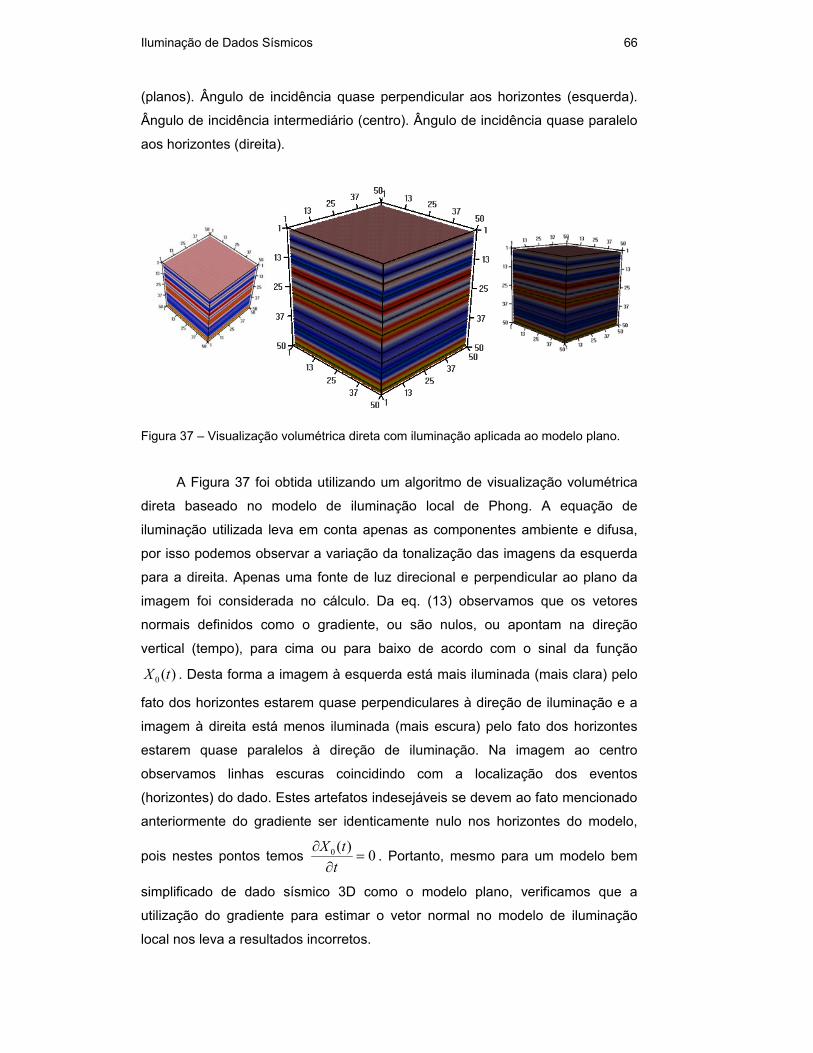
Iluminação de Dados Sísmicos 66
(planos). Ângulo de incidência quase perpendicular aos horizontes (esquerda).
Ângulo de incidência intermediário (centro). Ângulo de incidência quase paralelo
aos horizontes (direita).
Figura 37 – Visualização volumétrica direta com iluminação aplicada ao modelo plano.
A Figura 37 foi obtida utilizando um algoritmo de visualização volumétrica
direta baseado no modelo de iluminação local de Phong. A equação de
iluminação utilizada leva em conta apenas as componentes ambiente e difusa,
por isso podemos observar a variação da tonalização das imagens da esquerda
para a direita. Apenas uma fonte de luz direcional e perpendicular ao plano da
imagem foi considerada no cálculo. Da eq. (13) observamos que os vetores
normais definidos como o gradiente, ou são nulos, ou apontam na direção
vertical (tempo), para cima ou para baixo de acordo com o sinal da função
)(0 tX . Desta forma a imagem à esquerda está mais iluminada (mais clara) pelo
fato dos horizontes estarem quase perpendiculares à direção de iluminação e a
imagem à direita está menos iluminada (mais escura) pelo fato dos horizontes
estarem quase paralelos à direção de iluminação. Na imagem ao centro
observamos linhas escuras coincidindo com a localização dos eventos
(horizontes) do dado. Estes artefatos indesejáveis se devem ao fato mencionado
anteriormente do gradiente ser identicamente nulo nos horizontes do modelo,
pois nestes pontos temos 0)(0 =∂
∂t
tX. Portanto, mesmo para um modelo bem
simplificado de dado sísmico 3D como o modelo plano, verificamos que a
utilização do gradiente para estimar o vetor normal no modelo de iluminação
local nos leva a resultados incorretos.
Iluminação de Dados Sísmicos 67
Ao utilizarmos o gradiente como estimativa para o vetor normal a superfície
em cada voxel cometemos um erro ainda mais grave que o erro apresentado
anteriormente no exemplo do modelo plano. Este erro tem origem na própria
natureza da informação que se deseja extrair do dado sísmico. Os eventos
sísmicos não são necessariamente superfícies de nível do campo escalar de
amplitude sísmica. Esta observação surgiu durante a nossa pesquisa na
utilização da Opacidade 2D. Por isso não podemos garantir que o gradiente
deste campo estará apontando corretamente na direção perpendicular a
superfície dos refletores. Para ilustrar este problema utilizaremos um outro
modelo, derivado do modelo domo, que foi obtido induzindo uma perturbação
radial nas amplitudes do modelo domo.
Seja 1( , , )X t x y o campo escalar de amplitudes sísmicas do modelo domo,
definimos o modelo domo modificado 2 ( , , )X t x y como equação abaixo:
2 21 2( , , ) ( , , ) cos( )X t x y X t x y x yα ω = + (14)
As constantes α e ω são escolhidas de forma a manter a posição espacial
e a geometria dos refletores do dado, porém introduzindo uma variação lateral
nas amplitudes ao longo destes. A Figura 38 mostra, do lado esquerdo, uma
seção transversal (inline) do modelo sintético do domo modificado. A seta indica
um horizonte onde pode ser observada a variação lateral de amplitudes. Do lado
direito da figura vemos a imagem do horizonte indicado obtida por visualização
volumétrica com opacidade 2D. É fácil ver que os horizontes contidos no volume
do domo modificado não são superfícies de nível do campo escalar de amplitude
sísmica.

Iluminação de Dados Sísmicos 68
Figura 38 – Modelo domo modificado. Modelo sintético com variação de amplitudes ao
longo dos refletores.
A Figura 39 mostra o resultado obtido com a visualização volumétrica do
dado do domo modificado utilizando o gradiente para estimar os vetores normais
nos voxels. Do lado esquerdo temos a imagem obtida sem iluminação, e do lado
direito com iluminação usando o gradiente da amplitude para estimar o vetor
normal nos voxels, como é usual. Podemos observar que o efeito de tonalização
causado pela iluminação não está coerente com a geometria da superfície que
forma o horizonte. O padrão gerado pela iluminação sugere um relevo
inexistente na superfície, uma falsa impressão de rugosidade. O efeito
indesejável observado nesse exemplo pode ser comparado à técnica de bump
mapping (Blinn, 1978) onde, é causada uma perturbação nos vetores normais
durante o cálculo da iluminação, por meio de texturas, para dar à superfície uma
aparência áspera, rugosa, ondulada etc. De fato a geometria do horizonte em
questão não possui as ondulações sugeridas pela iluminação, porém os vetores
normais utilizados na iluminação acompanham a geometria das superfícies de
nível do modelo.

Iluminação de Dados Sísmicos 69
Figura 39 – Iluminação aplicada a um horizonte com variação lateral de amplitudes.
A Figura 40 mostra a geometria de duas superfícies de nível que estão
situadas na mesma região do horizonte da Figura 39. A diferença entre a
geometria do horizonte e das superfícies de nível é evidente. Esta é uma razão
ainda mais forte para não utilizarmos o gradiente para estimar os vetores
normais.
2 1( , , )X t x y c= 2 2( , , )X t x y c=
1 2c c>2 1( , , )X t x y c= 2 2( , , )X t x y c=
1 2c c>
Figura 40 – Superfícies de nível do modelo sintético do domo modificado.
Os problemas observados nestes exemplos justificam o fato dos sistemas
de visualização de dados sísmicos que fornecem a opção de visualização
volumétrica não utilizarem iluminação.

Iluminação de Dados Sísmicos 70
4.2. Trabalhos Relacionados
Em (Barnes, 2003) é apresentada a técnica de relevo sombreado (shaded
reliefs). Esta técnica produz um atributo sísmico volumétrico que é obtido usando
a equação do modelo de iluminação de Phong. Este atributo é calculado
iluminando todos os voxels do dado, tratando cada voxel como um ponto em
uma superfície cuja orientação local é dada pelo mergulho e pelo azimute.
A abordagem do relevo sombreado é uma técnica comumente utilizada
para realce em mapas e difere da nossa principalmente em 2 pontos. Primeiro
na própria visualização, o autor desse trabalho sugere que o atributo calculado
seja visualizado como uma textura aplicada a fatias horizontais (time-slices) do
dado sísmico ou aplicada a horizontes já rastreados. Portanto, podemos
classificar o relevo sombreado como um método de visualização volumétrica
indireta. A própria maneira como a orientação local dos horizontes é calculada
nos voxel também é diferente. O atributo de iluminação é calculado a partir dos
atributos de mergulho e azimute locais, estes atributos por sua vez são
calculados a partir dos números de onda locais de cada voxel. O autor não
sugere a aplicação o relevo sombreado na visualização volumétrica direta.
4.3. Solução Proposta
Como foi visto anteriormente os eventos sísmicos não são
necessariamente superfícies de nível do campo escalar de amplitude sísmica.
Por isso o gradiente deste campo não é uma boa aproximação dos vetores
normais das superfícies definidas pelos eventos. Para fazer uso de algoritmos de
visualização volumétrica com cálculo de iluminação baseado em modelos locais,
precisamos calcular um campo vetorial, definido no mesmo domínio do dado,
que seja perpendicular aos eventos sísmicos. Em (Silva, 2003) sugerimos uma
maneira de calcular tal campo vetorial para iluminação com bons resultados
práticos tanto para os dados sintéticos quanto para dados reais. Essa nova
maneira de estimar vetores normais em dados sísmicos volumétricos surgiu da
observação, feita nos trabalhos sobre opacidade 2D, de que o atributo de fase
instantânea se mantém constante ao longo de um evento sísmico. Daí nasceu a
idéia de utilizar o gradiente do campo escalar de fase instantânea para
aproximar os vetores normais aos eventos sísmicos.

Iluminação de Dados Sísmicos 71
Calculamos o campo gradiente do atributo de fase instantânea da seguinte
forma:
( , , )X t x y (15)
( , , )Y t x y (16)
Na eq. (15) X é o campo escalar da amplitude sísmica, e na eq. (16) Y é
o campo das transformadas de Hilbert dos traços de X, ou seja:
( , , ) ( , , ) ( )Y t X t h t= ∗i i i i (17)
Cada traça do campo Y pode ser obtido pela convolução do traço
equivalente em X com o núcleo da transformada de Hilbert (Apêndice A), como
na eq. (17). Definimos então o campo escalar de fase instantânea como sendo:
( , , )( , , ) arctan( , , )
Y t x yt x yX t x y
θ
=
(18)
Utilizamos o campo escalar de fase instantânea com valores contidos nos
intervalos [-π , π ]. Devido ao fato do campo escalar de fase instantânea ter
descontinuidades, isto é, saltos de –π para π ao longo dos traços, utilizamos a
expansão da derivada do arco-tangente para definir o campo gradiente da fase
instantânea.
( , , ) arctan , arctan , arctanY Y Yt x yt X x X y X
θ ∂ ∂ ∂ ∇ = ∂ ∂ ∂
(19)
Substituindo a expressão da derivada do arco-tangente,
2
1arctan( )1
d sds s
=+
(20)
Por exemplo, substituindo a eq. (20) na primeira componente do gradiente
da eq. (19) e usando a regra da cadeia temos:

Iluminação de Dados Sísmicos 72
2 2
( , , ) 1arctan
( , , )1
t tXY X YY t x yt X t x y XY
X
− ∂ = ∂ +
(21)
Simplificando,
2 2
( , , )arctan( , , )
t tY t x y XY X Yt X t x y X Y
∂ −= ∂ +
(22)
Finalmente chegamos à expressão do campo gradiente da fase
instantânea abaixo.
( )2 2
1( , , ) , ,t t x x y yt x y XY X Y XY X Y XY X YX Y
θ∇ = − − −+
(23)
4.4. Resultados
Nesta seção apresentaremos os resultados obtidos utilizando nossa
proposta que utiliza o campo vetorial definido na eq. (23) para estimar o vetor
normal às superfícies formadas pelos eventos sísmicos.
Na Figura 41 temos do lado esquerdo o resultado obtido aplicando o
método proposto ao dado sintético do modelo plano, e do lado direito temos a
imagem obtida com a abordagem tradicional. Podemos observar na Figura 41
que o método proposto evita o aparecimento dos artefatos (linhas pretas) na
região onde estão localizados os horizontes. A seta indica artefatos de
visualização presentes na imagem gerada com nossa abordagem, porém
podemos observar que estes artefatos não estão localizados na região de
nenhum horizonte do dado.

Iluminação de Dados Sísmicos 73
-0.95 0 0.95-0.95 0 0.95 Figura 41 – Imagem do modelo plano obtida pelo método proposto (esquerda). Imagem
obtida pelo método tradicional (direita).
A solução proposta corrige o problema da iluminação no caso do modelo
plano porque, por definição, a derivada da fase instantânea é a freqüência
instantânea, e a freqüência instantânea é, naturalmente diferente de zero nos
eventos sísmicos (extremos) do traço gerador do modelo plano, como podemos
verificar na Figura 42. Porém a freqüência instantânea pode ir a zero, ou até
mesmo ser negativa, devido a uma amostragem pobre (aliasing) ou devido a
presença de ruído.
-4
-3
-2
-1
0
1
2
3
4
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49
Amplitude Sísmica Fase Instantânea Freqüência Instantânea-4
-3
-2
-1
0
1
2
3
4
-4
-3
-2
-1
0
1
2
3
4
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 491 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49
Amplitude Sísmica Fase Instantânea Freqüência Instantânea Figura 42 – Gráfico da amplitude sísmica, fase instantânea e freqüência instantânea do
traço gerador do modelo plano.

Iluminação de Dados Sísmicos 74
Seguindo a solução proposta definimos o campo escalar de fase
instantânea como sendo:
0( , , ) ( )t x y tθ θ= (24)
Onde )(0 tθ é a fase instantânea (unidimensional) calculada no traço
gerador do modelo plano. Tomando o gradiente do campo escalar de fase
instantânea do modelo plano temos:
0( , , ) ( ),0,0t x y tt
θ θ∂ ∇ = ∂ (25)
0 0( ) ( )f t ttθ∂
=∂
(26)
Portanto pela eq. (26) o gradiente do campo escalar de fase instantânea
está bem definido mesmo na posição onde estão localizados os eventos
sísmicos do modelo plano, graças ao fato de que a derivada da fase instantânea
é a freqüência instantânea )(0 tf .
Examinaremos agora os resultados obtidos com a solução proposta
aplicada ao dado sintético do modelo do domo modificado. Na Figura 43 temos,
do lado esquerdo, a visualização do campo vetorial normal à superfície de uma
esfera mapeado em cores, ou seja, as componentes dos vetores normais foram
convertidas em cores e aplicadas como uma textura em cima da superfície,
segundo as equações abaixo.
( , , )n x y z= (27)
( 1) / 2 (Canal vermelho)R x= + (28)
( 1) / 2 (Canal verde)G y= + (29)
( 1) / 2 (Canal azul)B z= + (30)
Considerando que o campo vetorial esteja normalizado temos que as
componentes dos vetores normais estão no intervalo [-1, 1], conseqüentemente,
após a transformação descrita nas equações (28) a (30), as intensidades dos
canais de cor estão no intervalo [0, 1]. No centro da Figura 43 temos a
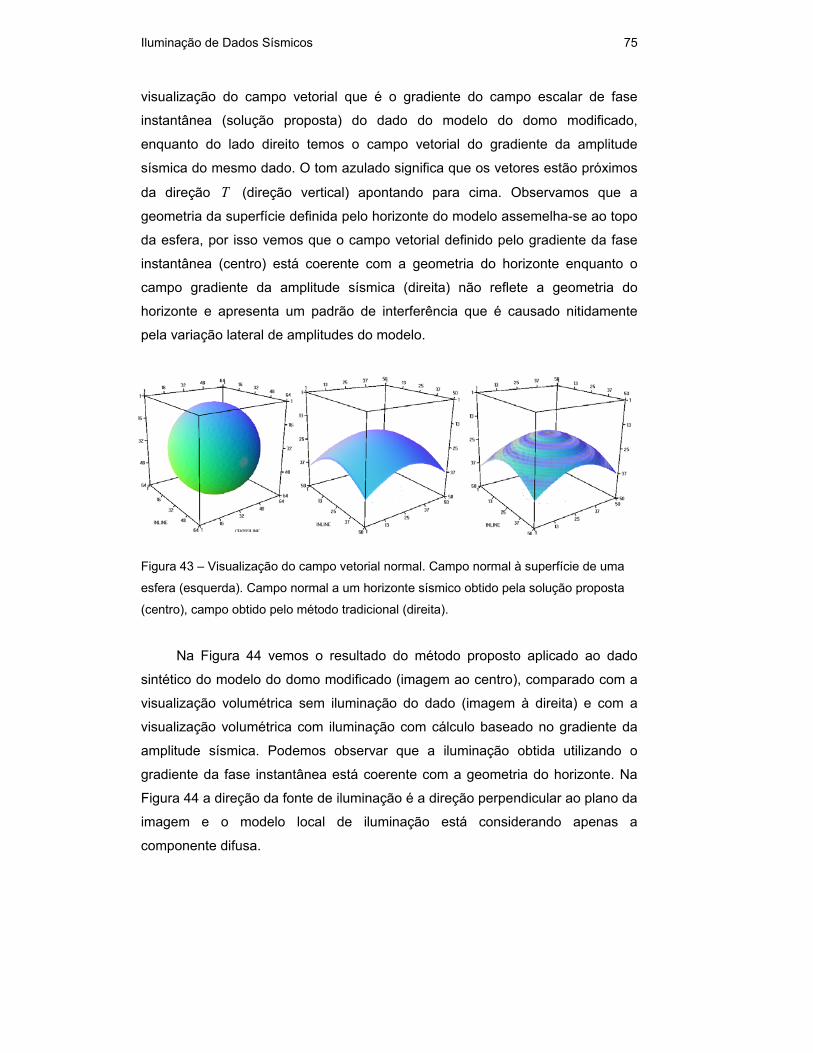
Iluminação de Dados Sísmicos 75
visualização do campo vetorial que é o gradiente do campo escalar de fase
instantânea (solução proposta) do dado do modelo do domo modificado,
enquanto do lado direito temos o campo vetorial do gradiente da amplitude
sísmica do mesmo dado. O tom azulado significa que os vetores estão próximos
da direção T (direção vertical) apontando para cima. Observamos que a
geometria da superfície definida pelo horizonte do modelo assemelha-se ao topo
da esfera, por isso vemos que o campo vetorial definido pelo gradiente da fase
instantânea (centro) está coerente com a geometria do horizonte enquanto o
campo gradiente da amplitude sísmica (direita) não reflete a geometria do
horizonte e apresenta um padrão de interferência que é causado nitidamente
pela variação lateral de amplitudes do modelo.
Figura 43 – Visualização do campo vetorial normal. Campo normal à superfície de uma
esfera (esquerda). Campo normal a um horizonte sísmico obtido pela solução proposta
(centro), campo obtido pelo método tradicional (direita).
Na Figura 44 vemos o resultado do método proposto aplicado ao dado
sintético do modelo do domo modificado (imagem ao centro), comparado com a
visualização volumétrica sem iluminação do dado (imagem à direita) e com a
visualização volumétrica com iluminação com cálculo baseado no gradiente da
amplitude sísmica. Podemos observar que a iluminação obtida utilizando o
gradiente da fase instantânea está coerente com a geometria do horizonte. Na
Figura 44 a direção da fonte de iluminação é a direção perpendicular ao plano da
imagem e o modelo local de iluminação está considerando apenas a
componente difusa.

Iluminação de Dados Sísmicos 76
Figura 44 – Visualização volumétrica do dado sintético com variação de amplitudes ao
longo dos horizontes: sem iluminação (equerda), iluminado usando a solução proposta
(centro) e iluminado da maneira tradicional (direita).
Aplicando o método de iluminação proposto a dados sísmicos 3D reais
obtivemos ótimos resultados. Para ressaltar a importância da iluminação
definimos na Figura 45 uma função de transferência com tabela de cor
monocromática e uma função de opacidade 2D que destaca um horizonte
sísmico. Comparando a imagem (a) obtida sem iluminação com a imagem (b)
obtida pelo método proposto, podemos observar que o efeito da iluminação
revela detalhes estruturais do horizonte destacado. Na imagem (c) obtida com
iluminação calculada usando o gradiente da amplitude sísmica para estimar os
vetores normais, podemos observar o mesmo padrão de interferência que foram
observados no dado sintético devido à variação de amplitudes ao longo do
horizonte.
(a) (b) (c)(a) (b) (c) Figura 45 – Visualização volumétrica de um dado sísmico 3D real: sem iluminação
(esquerda), iluminação usando o método proposto (centro) e iluminação usando a
abordagem tradicional (direita).
Na Figura 46 utilizamos para teste um dado real de aquisição marinha. Nas
quatro imagens da figura a cor representa o valor da amplitude sísmica. Na

Iluminação de Dados Sísmicos 77
imagem (a) todos os voxels estão com opacidade igual a um, a parte branca
superior corresponde à lâmina d’água do dado. Na imagem (b) temos a
visualização volumétrica sem iluminação, o que faz com que detalhes da
topologia do fundo do mar sejam perdidos.
(a) (c) (d)(b)
1280-127
(a) (c) (d)(b)
1280-127
(b)
1280-127 Figura 46 – Visualização volumétrica. Adaptado de (Silva et al, 2003).
A Figura 46c foi obtida utilizando o método proposto, ou seja, o gradiente
da fase instantânea foi utilizado para aproximar os vetores normais nos voxels
para o cálculo da iluminação, enquanto na imagem (d) foi utilizado o gradiente da
amplitude sísmica para estimar o vetor normal (abordagem tradicional).
4.5. Conclusões Parciais
Neste capítulo concluímos que a abordagem tradicional para o cálculo da
iluminação na visualização volumétrica direta, quando aplicada a dados
sísmicos, nos leva a resultados incorretos. O uso do gradiente do dado
volumétrico de amplitude sísmica para estimar o vetor normal (orientação local)
não pode ser aplicado na visualização de horizontes sísmicos. Apresentamos os
problemas da abordagem tradicional aplicando-a a dois modelos sintéticos de
dados sísmicos e examinando os resultados. No caso do modelo mais simples
de camadas planas e horizontais, verificamos que a abordagem tradicional falha
porque o gradiente vai a zero exatamente onde estão localizados os horizontes
sísmicos. No caso do modelo com forma de domo (anticlinal) e com variação
lateral de amplitudes verificamos que a abordagem tradicional falha porque o
gradiente acompanha as superfícies de nível da amplitude sísmica e estas não
coincidem com os horizontes sísmicos.
Também concluímos que a nossa abordagem, usando o campo vetorial do
gradiente da fase instantânea, calculado segundo a eq. (23), é uma maneira

Iluminação de Dados Sísmicos 78
mais apropriada de estimar o vetor normal ao longo dos horizontes sísmicos do
dado. Verificamos isto aplicando a nossa abordagem e a abordagem tradicional
aos dados sintéticos e reais e comparando os resultados. Esta comparação foi
feita baseada em critérios de qualidade visual das imagens resultantes e na
presença (ou ausência) de artefatos de visualização.

Rastreamento de Horizontes Sísmicos 79
5 Rastreamento de Horizontes Sísmicos
Uma técnica importante de interpretação sísmica é o rastreamento de
horizontes. O rastreamento de um horizonte em um dado sísmico 3D consiste
em identificar em quais traços o horizonte esta presente e, nestes traços,
identificar quais amostras pertencem ao horizonte.
As dificuldades encontradas no processo de rastreamento de horizontes
são principalmente a baixa razão-sinal-ruído em algumas regiões do dado, a
proximidade entre vários horizontes distintos, a própria complexidade da
geologia e a presença de falhas geológicas. Grande parte dos algoritmos tende a
confundir horizontes diferentes como se fossem um único durante o
rastreamento. O problema de rastreamento de horizontes torna-se ainda mais
difícil devido ao fato do horizonte sísmico não ser uma superfície de nível dentro
do volume de amplitudes sísmicas, por isso os métodos tradicionais de extração
de superfícies como o Marching Cubes (Lorensen e Cline, 1987) não podem ser
aplicados diretamente.
O rastreamento de horizontes pode ser considerado, do ponto de vista de
visão computacional, como uma técnica de segmentação ou, do ponto de vista
de modelagem e visualização, como uma técnica de extração de superfícies. A
finalidade do rastreamento vai além da simples visualização do horizonte. Mas,
dentro do contexto deste trabalho de tese, consideramos o rastreamento de
horizontes como sendo uma técnica de visualização volumétrica direta adaptada
para dados sísmicos.
Neste capítulo apresentamos um novo método de extração de horizontes
sísmicos. Este método é baseado em uma abordagem de otimização e foi
implementado e testado em dados sintéticos e reais. Na seção 5.1 citamos
alguns trabalhos relacionados com a nossa pesquisa. Na seção 5.2
apresentamos um modelo matemático de otimização para o problema de
rastreamento. Na seção seguinte propomos um método heurístico que produz
soluções quase-ótimas para o problema de otimização. Na seção 5.4
apresentamos os resultados obtidos pela aplicação do nosso método em um
dado real. Na seção 5.5 fazemos considerações sobre os resultados obtidos.

Rastreamento de Horizontes Sísmicos 80
5.1. Trabalhos Relacionados
Existem diversas abordagens diferentes para resolver o problema de
rastreamento de horizontes sísmicos de maneira automática ou semi-automática.
(Woodham et al., 1995) sugere uma abordagem probabilística que aplica filtros
de associação de dados probabilísticos (probabilistic data association – PDA) ao
problema. (Alberts et al., 2000) usa redes neurais artificiais para rastrear vários
horizontes simultaneamente. Em (Dorn, 1998) os métodos de rastreamento
automático são classificados em duas categorias: métodos baseados em
feições, que procuram por máximos (mínimos ou cruzamentos de zero) de
amplitude; e métodos baseados em correlação, que usam a medida de
correlação cruzada para guiar o rastreamento de um traço sísmico para o outro.
A nossa abordagem está mais próxima dos métodos baseados em correlação.
5.2. Modelagem de Otimização
Nesta seção apresentaremos uma modelagem matemática onde o
problema de rastreamento de horizontes pode ser considerado como um
problema de otimização. Nesta abordagem um horizonte sísmico discreto pode
ser aproximado pela solução deste problema de otimização. Nas subseções
seguintes introduziremos algumas definições e notações, que serão usadas na
modelagem do problema.
5.2.1. Volumétrico Sísmico Discreto
Para modelar o rastreamento de horizontes sísmicos como um problema
de otimização, consideramos como um dos dados de entrada um conjunto de
amostras (voxels) de amplitudes sísmicas, em valores reais, tomadas numa
grade regular tridimensional U . De acordo com a notação padrão usada em
geofísica representamos o dado de amplitude sísmica por uma função X
definida sobre o espaço U .
:X U → R (31)
3[1, ] [1, ] [1, ]U NT NX NY= × × ⊂ Z (32)

Rastreamento de Horizontes Sísmicos 81
Os valores NT , NX e NY são, respectivamente, o número de amostras
em cada traço, o número de crosslines do dado e o número de inlines do dado.
Dado um voxel ( , , )i j kv v v v U= ∈ os inteiros [1, ]iv NT∈ , [1, ]jv NX∈ e
[1, ]kv NY∈ são os índices na direção vertical (tempo), direção crossline e
direção inline do voxel, respectivamente.
5.2.2. Conjunto de traços do dado
Definimos U como sendo o conjunto de todos os traços sísmicos contidos
no dado volumétrico em questão. Definir o problema de otimização utilizando
este conjunto, e não o conjunto U servirá para garantir a condição de que um
horizonte sísmico intercepta um traço apenas uma vez. Voltaremos à discussão
desta condição mais adiante. Cada traço do dado está completamente
determinado pelo seu par de coordenadas espaciais, por isso definimos:
[1, ] [1, ]U NX NY= × (33)
É importante observar que existe uma relação natural entre as amostras
(voxels) do conjunto U e os traços do conjunto U , i.e., cada amostra está
contida em um único traço. A partir desta relação natural entre estes conjuntos,
que pode ser considerada como uma projeção de U em U , definimos a
notação abaixo.
:
( , , ) ( , )v U Uv i j k v j k
→= → =
(34)
Portanto, dada uma amostra v contida em U usamos a notação v para
representar o traço em U contendo v .

Rastreamento de Horizontes Sísmicos 82
5.2.3. Horizonte Sísmico Discreto
Definimos um horizonte sísmico discreto H como sendo simplesmente um
subconjunto de voxels com a condição de que este conjunto possui apenas um
único voxel por traço. Esta condição pode ser formalizada como abaixo:
, ej j k k i i
H Uu v H v u v u v u
⊂∈ ∴ = = ⇒ =
(35)
Na definição acima temos que um horizonte sísmico discreto H é um
conjunto de voxels (subconjunto de U ) satisfazendo a seguinte condição: se u
e v são dois voxels de H , tais que j jv u= e k kv u= , ou seja, u e v pertencem
ao mesmo traço, temos que i iv u= (u e v possuem o mesmo índice na direção
do tempo), ou melhor, u e v são o mesmo voxel. Definido-o desta forma
garantimos que o horizonte sísmico discreto corta um traço do volume uma única
vez.
A condição de que um horizonte sísmico discreto corta um traço do volume
uma única vez não possui uma versão equivalente para horizontes reais. Em
várias configurações geológicas reais esta condição não seria satisfeita, porém
para a modelagem que estamos introduzindo impor esta condição sobre os
horizontes sísmicos esta condição é essencial, é ela que impõe a maior restrição
para que uma solução do problema de otimização contenha um único horizonte
sísmico. Portanto, como estamos interessados em encontras apenas boas
aproximações dos horizontes sísmicos reais achamos que é mais vantajoso
considerar tal condição.
5.2.4. Conjunto de Sementes
Um outro dado de entrada para o problema é um conjunto de voxels,
chamado de conjunto de sementes, escolhido pelo usuário. Na modelagem do
problema de otimização restringiremos o conjunto de soluções viáveis para o
conjunto de horizontes sísmicos discretos que contenham o conjunto de
sementes.
1{ ,..., }MS s s U= ⊂ (36)

Rastreamento de Horizontes Sísmicos 83
Consideramos que o conjunto de sementes é escolhido de forma
consistente, ou seja, não pode ser vazio, não pode conter duas sementes em um
mesmo traço e deve ser escolhido sobre um mesmo horizonte sísmico.
5.2.5. Função de Similaridade
A função de similaridade associa um número real a cada par de voxels do
dado volumétrico, este número tenta aproximar a probabilidade de dois voxels
estarem no mesmo horizonte sísmico, ou seja, quanto maior for o valor da
função de similaridade para dois voxels maior é a chance destes estarem no
mesmo evento sísmico.
:U Uσ × → R (37)
Em nosso método utilizamos o coeficiente de correlação como função de
similaridade entre os voxels. Dados dois voxels ( , , )i j ku u u u= e ( , , )i j kv v v v=
definimos:
22 2
( , , ) ( , , ) ( , , ) ( , , )( , )
( , , ) ( , , ) ( , , ) ( , , )
w w w
i j k i j k i j k i j kd w d w d w
w w w w
i j k i j k i j k i j kd w d w d w d w
X u d u u X v d v v X u d u u X v d v vu v
X u d u u X u d u u X v d v v X v d v v
σ =− =− =−
=− =− =− =−
+ + − + +
=
+ − + + − +
∑ ∑ ∑
∑ ∑ ∑ ∑2
(38)
Na eq. (38) acima w define duas janelas de correlação com largura 2 1w +
em torno dos voxels u e v . Esta janela está restrita aos traços u e v contendo,
respectivamente, u e v . Esta medida de similaridade é comumente usada para
registro de imagens em sistemas de informação geográficas (Brown, 1992). O
valor da função objetivo está compreendido no intervalo [0,1] , quando o valor
está próximo de 1 os voxels são similares e quando o valor está próximo de zero
não são similares.

Rastreamento de Horizontes Sísmicos 84
5.2.6. Função de Semente Associada
A função de semente associada, como o próprio nome diz, associa um
elemento do conjunto de sementes a cada voxel de um horizonte sísmico
discreto.
:s H S→ (39)
A função de semente associada tem um papel importante na definição da
função objetivo do problema de otimização. Tentamos encontrar o horizonte
sísmico discreto onde a similaridade entre cada voxel e sua respectiva semente
associada é máxima. Escolhemos considerar a similaridade entre o voxel e sua
semente associada, e não a similaridade entre o voxel e seus vizinhos, para
diminuir a propagação de erro, já que a informação das sementes é a informação
segura da qual dispomos.
5.2.7. Problema de Otimização
Usando as definições e notações das seções anteriores modelamos o
problema de rastreamento de horizontes sísmicos como o problema de
otimização descrito abaixo:
• Determinar um horizonte sísmico discreto H e uma função de semente
associada s definida em H que
• Maximiza ( , ( ))v H
v s vσ∈∑
• E satisfaz:
o (Condição das sementes)
O horizonte contém todas as sementes.
S H⊂ .
o (Condição de caminho)
Para todo voxel no horizonte existe um caminho de voxels do
horizonte liga esse voxel a sua semente associada. A variação da

Rastreamento de Horizontes Sísmicos 85
coordenada tempo (coordenada i ) entre os voxels do caminho é
limitada.
1, { ,..., } tal quenv H v v H∀ ∈ ∃ ⊂
1 1, ( ) e ( ) ( )n r i r iv v v s v v v δ+= = − ≤ .
o (Condição das amplitudes sísmicas)
As amplitudes sísmicas dos voxels do horizonte estão contidas
num certo intervalo de amplitudes predefinido.
[ ]min max( , , ) , ( , , ) ,i j k i j kv v v v H X v v v X X∀ = ∈ ∈ .
A condição de caminho e a condição das amplitudes ajudam a evitar que o
horizonte solução do problema contenha voxels que não sejam do horizonte de
interesse. A condição de caminho garante que para cada voxel v de uma
solução viável H existe um caminho 1{ ,..., }nv v de voxels de H ligando o voxel
v a sua semente associada ( )s v . O número real δ restringe a variação das
coordenadas na direção do tempo ( )r iv dos voxels rv do caminho. Com a
condição de caminho uma solução viável é composta de componentes conexas
por caminho. Cada componente conexa corresponde a imagem inversa de uma
semente pela função de semente associada 1( )uH s u−= .
Com a condição das amplitudes sísmicas restringimos os valores das
amplitudes dos voxels de uma solução viável. Por exemplo, se queremos
rastrear um horizonte com amplitudes sísmicas positivas podemos definir
min 0X = e maxX = +∞ . Por isso, também é importante que o intervalo de
amplitudes seja definido de forma coerente com a escolha das sementes, ou
seja, se escolhemos sementes com valores de amplitude positiva o intervalo de
amplitudes deve ser definido de acordo.
5.3. Método Proposto
Apesar de não termos conseguido uma prova formal, acreditamos
fortemente que o problema definido na seção anterior é NP-completo. Porém,
ainda existe a possibilidade de se encontrar uma solução exata para o problema
com complexidade polinomial. Nesta seção apresentamos uma solução
heurística baseada em uma estratégia gulosa para encontrar soluções quase-

Rastreamento de Horizontes Sísmicos 86
ótimas para o problema. A idéia básica do nosso método é a cada passo
expandir a solução viável corrente adicionando novos voxels. Para isto
mantemos dois conjuntos de voxels, um conjunto H contendo os voxels da
solução viável corrente e um outro conjunto H + contendo os voxels que são
candidatos a entrar na solução corrente.
Se considerarmos o conjunto H de traços contendo os voxels do
horizonte H este método assemelha-se a uma estratégia do tipo crescimento de
região (region growing), definido sobre uma imagem U . Porém, como H é uma
superfície mergulhada em um volume, necessitamos de uma definição mais
precisa para o conceito de vizinhança para definir os conjunto de voxels
candidatos a entrar na região.
5.3.1. Inicialização
A solução viável inicial deve ser definida de modo a satisfazer a condição
das sementes. Por isto o horizonte inicial é igual ao conjunto de sementes.
H S= (40)
Definimos a função de semente associada como sendo a identidade do
conjunto H .
( ) ,r r rs s s s H= ∈ (41)
Como estamos assumindo que o conjunto de sementes (voxels) é
escolhido de forma consistente, a solução inicial definida desta forma é
trivialmente viável.
5.3.2. Aprimoramento da Solução Corrente
Para estender a solução viável corrente definimos um conjunto H + de
voxels na vizinhança de H . Estes voxels são candidatos a entrar no horizonte
da solução corrente.

Rastreamento de Horizontes Sísmicos 87
Um voxel v pertence ao conjunto H + se o traço v contendo v não é um
traço de H , existe um voxel u H∈ tal que u e v são traços vizinhos e a
variação entre as coordenadas na direção do tempo de u e v está dentro do
limite. Mais precisamente:
[ ]min max
( ) and ( ) ,
i i
v Hv H u H v N u v u
X v X Xδ+
∈
∈ ⇔ ∃ ∈ ∴ ∈ − ≤ ∈
(42)
Na definição acima ( )N u representa a vizinhança do traço u dentro do
conjunto de traços. Esta vizinhança pode ser definida 4-conectada ou 8-
conectada de forma similar às vizinhanças de pixels em uma imagem.
Pela própria construção do conjunto H + podemos dizer que: para cada
voxel v H +∈ existe pelo menos um voxel u H∈ tal que ( )v N u∈ os traços de
u e v são vizinhos e i iv u δ− ≤ a variação da coordenada na direção do tempo
está dentro do limite. Dentre todos as opções escolhemos o voxel u cujo o valor
( , ( ))v s uσ é máximo. Então definimos para cada v H +∈ :
( , ( ))v v s uσ σ= (43)
Em cada passo do método escolhemos o voxel candidato v H +∈ onde
0vσ > e vσ é máximo. Se não existe um voxel candidato com 0vσ > então o
algoritmo é encerrado. Caso contrário, o voxel candidato v escolhido entra no
horizonte H , o conjunto de voxels candidatos H + é atualizado e definimos a
semente associada de v como sendo:
( ) ( )s v s u= (44)
Usando indução sobre o processo descrito acima para selecionar um novo
voxel v , podemos mostrar facilmente que a solução obtida adicionando um novo
voxel escolhido desta forma a uma solução corrente viável ainda é uma solução
viável.

Rastreamento de Horizontes Sísmicos 88
5.3.3. Convergência
O processo para estender uma solução corrente viável, descrito acima, nos
fornece uma seqüência de soluções viáveis onde o valor da função objetivo é
estritamente crescente. Dada a natureza discreta e finita do problema de
otimização em questão, o valor da função objetivo está naturalmente limitado.
Logo, o método converge.
5.3.4. Análise de Complexidade
Apresentamos abaixo um pseudo-código para auxiliar na análise de
complexidade do método proposto.
/* Inicialização */
1 H S← O(1)
2 Para cada rs H∈ O(1)
3 ( )r rs s s= O(1)
4 Atualiza(H + , rs ) O(log(NXxNY))
/* Seleção do Candidato */
5 { }( , , ) arg max |v vv u v Hσ σ +← ∈ O(1)
/* Estendendo a solução corrente */
6 Enquanto ( v∃ e 0vσ > ) O(1)
7 { }H H v← ∪ O(1)
8 ( ) ( )s v s u= O(1)
9 Atualiza(H + , rs ) O(log(NXxNY))
10 { }( , , ) arg max |v vv u v Hσ σ +← ∈ O(1)
Código 1 – Principal.
Na nossa análise consideramos o tamanho do dado igual a NT NX NY× ×
e que foram definidas M sementes. O laço da linha 2 é repedido M vezes (uma

Rastreamento de Horizontes Sísmicos 89
para cada semente). Como o número de sementes é insignificante comparado
com o número de traços NX NY× podemos considerá-lo como uma constante.
Portanto a complexidade da etapa de inicialização (linhas 2 a 4) é igual a
complexidade da função Atualiza. A complexidade desta função será
analisada mais adiante.
A linha 5 pode ser implementada para ser executada em tempo constante
se utilizarmos uma estrutura de dados do tipo heap para armazenar as triplas
( , , )vv u σ . Estas triplas, definidas como em (43), representam os voxels
candidatos que são os elementos do conjunto H + . O heap representando o
conjunto de voxels candidatos está em ordem decrescente dos valores vσ .
O laço da linha 6 é executado a cada vez que um novo voxel é extraído do
heap H + e entra na solução corrente. O número total de voxels que podem
entrar na solução é no máximo NX NY× pois só podemos ter um único voxel por
traço do dado. Portanto, o número de repetições do laço da linha 6 é O(NXxNY).
Sempre que um novo voxel v entra na solução corrente o conjunto de
voxels candidatos precisa ser atualizado. Isto é feito pela função Atualiza.
Nesta função varremos todos os voxels vizinhos de v e incluímos no heap H +
todos aqueles que se enquadram na definição (42). A função Atualiza também
é responsável por gerenciar elementos repetidos no conjunto H + .
Atualiza(H + ,u)
1 Para cada v t.q. ( ( )v N u∈ e i iu v δ− ≤ ) O(1)
2 Se ( v H∉ e min max( )X X v X≤ ≤ ) O(1)
3 ( , ( ))v v s uσ σ← O(1)
4 {( , , )}vH H v u σ+ +← ∪ O(log(NXxNY))
Código 2 – Função Atualiza.
A função Atualiza tem tempo de execução (log( ))O NX NY× pois
consiste basicamente em uma inserção no heap. Logo, o método como um todo
tem complexidade ( log( ))O N N⋅ onde N NX NY= × é a dimensão espacial
(número de traços) do dado visto em mapa.

Rastreamento de Horizontes Sísmicos 90
5.4. Resultados
O método apresentado na seção anterior foi implementado na linguagem
de programação C++ e usa as primitivas básicas do OpenGL para visualizar os
resultados.
O algoritmo foi implementado usando uma estrutura de dados heap para
manipular de forma eficiente o conjunto de voxels candidatos. Com esta
otimização no código o método leva poucos segundos para encontrar um
horizonte em um dado sísmico volumétricos de tamanho 255 256 256× × rodando
em um Pentium 4 com configuração comum.
Para avaliar a qualidade das soluções geradas pelo método proposto
apresentaremos os resultados obtidos com um dado sísmico público que é parte
de um levantamento real. O tamanho do dado é 255 256 256× × amostras.
Figura 47 mostra duas vistas de um dado sísmico volumétrico. Em cada
imagem podemos ver 3 seções correspondendo as faces de um cubo. As cores
representam os valores de amplitude sísmica dos voxels e são: azul para valores
negativos, branco para valores próximos de zero e vermelho para valores
positivos. As curvas em verde, apontadas pelas setas, marcam o horizonte
sísmico de interesse no dado.
- 0 +- 0 + Figura 47 – Horizonte sísmico em um dado real.

Rastreamento de Horizontes Sísmicos 91
As imagens (a), (b), (c) e (d) da Figura 48 ilustram a evolução do nosso
algoritmo durante o rastreamento da Figura 47. Os parâmetros utilizados para
algoritmo de otimização foram: (i) uma função de similaridade com janela de
correlação de 15 voxels de largura ( 7w = ), (ii) o intervalo [ ]0,+∞ para restringir
os valores de amplitude sísmica, e (iii) o limite máximo para a variação na
coordenada do tempo igual a 1 ( 1δ = ).
Utilizamos um conjunto com 3 sementes para rastrear este horizonte.
Comparando a Figura 48b (50%) com a Figura 48c (75%) podemos observar que
o método encontra um boa solução para tratar a falha geológica presente no
dado. Ao invés de tentar atravessar a falha, o método segue um caminho
contornando-a. Isto se deve ao fato dos voxel na vizinhança da falha terem baixa
correlação com qualquer das sementes, portanto os voxels na vizinhança da
falha só entrarão no horizonte solução após todos os outros voxels com
correlação maior serem incluídos. Esta habilidade do método de conseguir evitar
cruzar uma falha movendo-se ao redor dela por um caminho mais apropriado, se
existe um, é uma característica muito útil.
(a) 25% (b) 50%
(c) 75% (d) 100% Figura 48 – Evolução do algoritmo.
A Figura 49 mostra as três sementes usadas no rastreamento do
horizonte. Cada semente está apontada por uma seta. Os voxels do horizonte
estão coloridos de acordo com sua semente associada. Temos três cores
(vermelho, verde e azul), cada uma correspondendo a uma das três sementes. É

Rastreamento de Horizontes Sísmicos 92
interessante observar que as regiões definidas pelas sementes azul e verde
estão separadas por uma falhas menor situada na porção superior da imagem,
esta falha divide o horizonte em duas partes. Por sua vez, a falha maior que está
bem visível na porção direita Figura 48d, não divide o dado e ambos os lados
estão relacionados com a mesma semente, a verde.
Figura 49 – Sementes e função de semente associada.
Na Figura 50 podemos examinar a estrutura temporal do horizonte
rastreado. Nesta figura as cores representam a coordenada na direção do tempo
dos voxels do horizonte.
Figura 50 – Estrutura temporal do horizonte.

Rastreamento de Horizontes Sísmicos 93
Uma falha geológica pode alinhar horizontes sísmicos distintos tornando o
rastreamento uma tarefa extremamente difícil. A Figura 51 mostra duas seções
verticais do dado (a) inline e (b) crossline. Em ambas temos a falha maior (linha
tracejada preta) e três horizontes “A”, “B” e “C”, de cima para baixo, interpretados
manualmente. O horizonte sísmico “A” é o mesmo mostrado nas figuras
anteriores. Como podemos ver, os horizontes “A” e “B” foram alinhados pela
falha, e o mesmo ocorre com os horizontes “B” e “C”.
BC
AB
C
A
(a) inline
AB
C
AB
C
(b) crossline
Figura 51 – Horizontes diferentes alinhados por uma falha geológica.

Rastreamento de Horizontes Sísmicos 94
Rastreamos o horizonte sísmico “A” usando uma ferramenta comercial de
interpretação sísmica e comparamos o resultado com o horizonte rastreado com
o nosso método. Utilizamos apenas uma semente neste teste. Na Figura 52
temos quatro vistas diferentes do horizonte sísmico “A” que foi rastreado usando
um ferramenta comercial de rastreamento. A curva em verde marca a posição
correta do horizonte, e as setas apontam os locais onde o rastreamento está
incorreto. Podemos ver claramente nas imagens (a), (c) e (d) que o rastreamento
saltou do horizonte “A” para o horizonte “B” que está logo abaixo.
(a) (b)
(c) (d)
Figura 52 – Horizonte “A” rastreado usando uma ferramenta comercial.
O horizonte que foi obtido usando nosso método de rastreamento está
mostrado na Figura 53. Tentamos reproduzir nesta figura as mesmas vistas da
figura anterior. Novamente as curvas verdes marcam a posição correta do
horizonte. Nas áreas apontadas pelas setas podemos verificar que nosso
método rastreou o horizonte “A” corretamente, como esperávamos.

Rastreamento de Horizontes Sísmicos 95
(a) (b)
(c) (d)
Figura 53 – Horizonte “A” rastreado usando nosso método de rastreamento.
5.5. Conclusões Parciais
Neste capítulo mostramos que o rastreamento de horizontes sísmicos
pode ser modelado como um problema de otimização. Apresentamos também
um método heurístico baseado em uma estratégia gulosa para encontrar
soluções quase-ótimas para o problema de otimização.
Os resultados obtidos em dados sísmicos reais nos mostram que as
soluções quase-ótimas fornecidas pelo nosso método são boas aproximações do
horizonte sísmico de interesse. Testamos o nosso método em diversos dados,
porém estes resultados não puderam ser incluídos neste documento devido a
restrições de segurança da informação da Petrobras.

Conclusões e Trabalhos Futuros 96
6 Conclusões e Trabalhos Futuros
6.1. Conclusões
Concluímos que a opacidade 2D aumenta a habilidade de selecionar os
horizontes sísmicos na visualização volumétrica direta. Utilizamos a amplitude
sísmica como a primeira dimensão na opacidade 2D. Utilizando o atributo de
fase instantânea como segunda dimensão conseguimos isolar os horizontes com
amplitude positivas do restante do dado. Observamos que os horizontes
sísmicos são superfícies de nível do atributo de fase instantânea. Devido às
descontinuidades do atributo de fase instantânea este se mostrou ineficiente
para isolar os horizontes sísmicos negativos. O atributo de fase ajusta idealizado
por nós é uma solução possível para este problema. Com o atributo de fase
ajustada conseguimos isolar tanto os horizontes positivos quanto os negativos
do restante do dado, além disso, conseguimos separar os horizontes positivos
dos negativos. Porém, para individualizar um único horizonte vimos que o
atributo sísmico ideal é o atributo ideal é o atributo de fase desenrolada.
Concluímos que o gradiente da amplitude sísmica não aproxima
corretamente os vetores normais aos horizontes sísmicos. Utilizamos modelos
sintéticos simples para mostrar que este problema se deve ao fato de que um
horizonte sísmico não é uma superfície de nível do volume de amplitudes
sísmicas. Por isso quando aplicamos a visualização volumétrica direta a volumes
de amplitudes sísmicas usando a abordagem tradicional para o cálculo de
iluminação obtemos resultados incorretos. Para resolver este problema
sugerimos a utilização do gradiente do atributo de fase instantânea para
aproximar os vetores normais dos horizontes. Este abordagem se mostrou
visivelmente mais eficiente. Consideramos este resultado como a maior
contribuição da nossa pesquisa até aqui.
Concluímos que o problema do rastreamento de horizontes sísmicos pode
ser modelado matematicamente como um problema de otimização. Acreditamos
que o problema definido é NP-Completo. Para este problema de otimização
apresentamos um método heurístico baseado em uma estratégia gulosa. O

Conclusões e Trabalhos Futuros 97
método proposto por nós fornece soluções quase-ótimas que são boas
aproximações do horizonte de interesse. Mostramos que a complexidade do
algoritmo de rastreamento proposto é ( log( ))O N N⋅ onde N é a dimensão
espacial do dado em questão, ou seja, N NX NY= × é o número de traços
sísmicos do dado.
6.2. Trabalhos Futuros
Sugerimos como trabalho futuro a utilização da opacidade 2D combinada
com outros atributos sísmicos, como por exemplo um atributo de coerência que
seja um indicador de descontinuidades para visualização de falhas.
Sugerimos fortemente a investigação de métodos mais robustos e
eficientes para o desenrolamento da fase instantânea em 3D. Acreditamos que o
atributo de fase desenrolada é de extrema utilidade tanto para visualização
volumétrica direta quanto para a indireta.
Sugerimos uma comparação entre o gradiente da fase instantânea e
outras abordagens para aproximar o vetor normal nos horizontes. Por exemplo,
comparar o gradiente da fase instantânea com os números de onda da
transformada de Fourier 3D.
Sugerimos a utilização da informação de orientação obtida com o gradiente
da fase instantânea para implementar filtros direcionais para dados sísmicos.
Estes filtros podem ser de suavização para eliminação de ruído, ou mesmo filtros
de detecção de bordos para tentar mapear falhas geológicas automaticamente.
Sugerimos a investigação da complexidade do problema de otimização
para rastreamento de horizontes. Encontrar uma prova formal de que o problema
é NP-Completo ou elaborar um método eficiente (polinomial) que encontre
soluções ótimas para o problema.
Sugerimos a extensão da abordagem de otimização para trabalhar com
múltiplos atributos.

Bibliografia 98
7 Bibliografia
ALBERTS, P.; WARNER, M.; LISTER, D. Artificial Neural Networks for Simultaneous Multihorizon Tracking Across Discontinuities, 70th Annual
Meeting: Society of Exploration Geophysicists – SEG, p. 651—653, 2000.
Proceedings.
BAHORICH, M. S.; FARMER, S. L. 3-D seismic discontinuity for faults and
stratigraphic features: The coherence cube. The Leading Edge, v.12, n.10, p.
1053—1058. October 1995.
BARNES, A. E. Theory of 2-D complex seismic trace analysis. Geophysics,
v.61, n.1, p. 264—272, January/February 1996.
BARNES, A. E. The complex seismic trace made simple. The Leading Edge,
v.17, n.4, p. 473—478, April 1998.
BLINN, J. Simulation of Wrinkled Surfaces. In: International Conference on
Computer Graphics and Interactive Techniques (SIGGRAPH’78), 5th, p. 286—
292, August 1978. Proceedings.
BLYTHE, D; McREYNOLDS, T. Advanced Graphics Programming Techniques Using OpenGL, In: SIGGRAPH 2000, Course Notes, No. 32
(2000).
BROWN, L. S. A Survey Of Image Registration Techniques, ACM Computing Surveys, v.24, n.4, p. 325—376, 1992.
DORN, G. A. Modern 3-D Seismic Interpretation, The Leading Edge, v.17, n.9,
p. 1262—1272. 1998.
DREBIN, R. A.; CARPENTER, L.; HANRAHAN, P. Volume rendering, In:
SIGGRAPH ’88, 15th, v.22, p. 65—74, August 1988. Proceedings.

Bibliografia 99
FERNANDO, R.; KILGARD, M. J. The Cg Tutorial: The Definitive Guide to Programmable Real-Time Graphics, Addison-Wesley Pub Co, February 26,
2003.
GERHARDT, A. Aspectos da Visualização Volumétrica de Dados Sísmicos.
1998. Dissertação de Mestrado, Pontifícia Universidade Católica do Rio de
Janeiro, Rio de Janeiro - RJ, 1998.
GERHARDT, A. et al. Two-Dimensional Opacity Functions for Improved Volume Rendering of Seismic Data. In: Congresso da Sociedade Brasileira de
Geofísica, VII, 2001 Salvador, Proceedings.
GHIGLIA, D. C.; PRITT, M. D. Two-Dimensional Phase Unwrapping. Wiley,
NY, 1998.
HADWIGER, M.; KNISS, J. M.; ENGEL, k.; REZK-SALAMA, C. High-Quality Volume Graphics on Consumer PC Hardware, In: SIGGRAPH 2002, Course
Notes, No. 42 (2002).
KINDLMANN, G.; DURKIN, J. W. Semi-Automatic Generation of Transfer Functions for Direct Volume Rendering. In: IEEE Symposium On Volume
Visualization, 1998 North Carolina, p. 79—86. Proceedings.
KINDLMANN, G. Semi-Automatic Generation of Transfer Functions for Direct Volume Rendering. Masters of Science Thesis - Program of Computer
Graphics, Cornell University, Ithaca, NY, 1999.
KNISS, J.; KINDLMANN, G.; HANSEN, C. Interactive Volume Rendering Using Multi-Dimensional Transfer Functions and Direct Manipulation Widgets. In: IEEE Visualization 2001 Conference (VIS 2001), 12th, 2001 San
Diego. Proceedings.
KNISS, J.; KINDLMANN, G.; HANSEN, C. Multi-Dimensional Transfer Functions
for Interactive Volume Rendering. IEEE Transactions on Visualization and Computer Graphics, v.8, n.3, p. 270—285, July/September 2002.

Bibliografia 100
LACROUTE, P.; LEVOY, M. Fast volume rendering using a shear-warp factorization of the viewing transformation. In: SIGGRAPH ’94, pp. 451–458, 1994. Proceedings.
LEVOY, M. Display of Surfaces from Volume Data. IEEE Computer Graphics & Applications, v.8, n.3, p. 29—37, May/June 1988.
LORENSEN, W. E.; CLINE, H. E. Marching Cubes: A High Resolution 3D Surface Construction Algorithm. In: International Conference on Computer
Graphics and Interactive Techniques (SIGGRAPH'87), 14th, v.21, n.4, August
1987, p. 163—169. Proceedings.
MACHADO, M. Segmentação de Dados Sísmicos Via Hyperstack para Visualização, Dissertação de Mestrado, Pontifícia Universidade Católica do Rio
de Janeiro, Rio de Janeiro - RJ, 2000.
MAX, N. Optical models for direct volume rendering. IEEE Transactions on Visualization and Computer Graphics, v.1, n.2, p. 99—108, June 1995.
MEIßNER, M.;HOFFMANN, U.; STRAßER, W. Enabling Classification and Shading for 3D-texture Based Volume Rendering Using OpenGL and Extensions. In: IEEE Visualization, 1999. Proceedings.
PFISTER, H. et al. The Transfer Function Bake-Off. IEEE Computer Graphics and Applications, v.21, n.3, p. 16—22, May/June 2001.
PHONG, B. T., Illumination for Computer Generated Pictures, Communications of the ACM, v.18, n.6, p. 311—317, June 1975.
REZK-SALAMA, C.; ENGEL, K.; BAUER, M.; GREINER, G.; ERTL, T.
Interactive Volume Rendering on Standard PC Graphics Hardware Using Multi-Textures and Multi-Stage Rasterization. In: SIGGRAPH/Eurographics
Workshop on Graphics Hardware, 2000. Proceedings.
ROBINSON, E. A.; TREITEL, S. Geophysical Signal Analysis, Prentice-Hall,
1980.

Bibliografia 101
SHERIFF, R. E. Encyclopedic Dictionary of Exploration Geophysics, 3. ed.,
Society of Exploration Geophysicists – SEG, Tulsa, OK, 1991.
SILVA, P. M.; MACHADO, M.; GATTASS, M. 3D Seismic Volume Visualization, In: Congresso da Sociedade Brasileira de Geofísica, VIII, 2003
Rio de Janeiro, Proceedings.
SPITZER, J. Programmable Texture Blending. In: Game Developers
Conference. 2001. http://www.nvidia.com/developer.
WESTERMANN, R.; ERTL, T. Efficiently using graphics hardware in volume rendering applications. In: SIGGRAPH ’98, pp. 169–178, 1998. Proceedings.
WESTOVER, L. Footprint evaluation for volume rendering, In: International
Conference on Computer Graphics and Interactive Techniques, 17th, 1990,
Dallas, TX, Proceedings.
WITTENBRINK, C. M.; MALZBENDER, T.; GOSS, M. E. Opacity-weighted color interpolation, for volume sampling, In: IEEE symposium on Volume
visualization, 1998, p. 135—142, Proceedings.
WOODHAM, C. A.; SANDHAM, W. A.; DURRANI, T. S. 3-D Seismic Tracking
with Probabilistic Data Association, Geophysics, v.60, n.4, p. 1088—1094. 1995.
YILMAZ, O. Seismic Data Processing, Society of Exploration Geophysicists –
SEG, Tulsa, OK, 1987.

Apêndice A: Transformada de Hilbert 102
Apêndice A: Transformada de Hilbert
A transformada de Hilbert foi derivada originalmente por Hilbert no contexto
da teoria de funções analíticas.
A transformada de Hilbert de um sinal real unidimensional ( )u t é definida
pela integral
1 ( )( ) u sv t VP ds
t sπ
+∞
−∞
=−∫ (45)
A transformada de Hilbert inversa é dada pela integral
1 ( )( ) v su t VP ds
t sπ
+∞
−∞
−=
−∫ (46)
As integrais definidas na eq. (45) e na eq. (46) são impróprias, pois seus
integrandos não estão definidos para s t= . Por isso as integrais estão definidas
usando o valor principal de Cauchy (denotado por VP ). Tomar o valor principal
de Cauchy significa que as equações devem ser calculadas usando limites como
abaixo:
0,
1 ( ) ( )( ) limt A
AA t
u s u sv t ds dst s t s
ε
εεπ
−
→ →∞− +
= + − −
∫ ∫ (47)
As definições da transformada de Hilbert e sua inversa também podem ser
escritas usando a notação de convolução.
( )( ) ( ) ( )f g t f s g t s ds+∞
−∞
∗ = −∫ (48)

Apêndice A: Transformada de Hilbert 103
1( ) ( )v t u ttπ
= ∗ (49)
1( ) ( )u t v ttπ
−= ∗ (50)
Ao contrário de outras transformadas, como a transformada de Fourier, a
transformada de Hilbert não muda o domínio da função. Por exemplo, uma
função de uma variável de tempo t é transformada para outra função de mesma
variável de tempo t , enquanto a transformada de Fourier muda uma função com
variável de tempo t para uma função com variável de freqüência f .
A transformada de Hilbert está intimamente relacionada com a
transformada de Fourier definida abaixo:
{ } 2( ) F ( ) ( ) ( ) i ftU f u t f u t e dtπ+∞
−
−∞
= = ∫ (51)
A transformada de Fourier do núcleo 1( )h ttπ
= da transformada de Hilbert
é:
2
( ) sinal( )i fteH f dt i ft
π
π
+∞ −
−∞
= = −∫ (52)
onde
1, 0
sinal( ) 0, 01, 0
ff f
f
+ >= =− <
(53)
Aplicando o teorema que diz que a transformada de Fourier de uma
convolução é o produto das transformadas à eq. (49) temos:
{ } { } { } { }F ( ) F ( ) ( ) ( ) F ( ) F ( )v f u t h t f u f h f= ∗ = ⋅ (54)
Aplicando a transformada de Fourier inversa temos:

Apêndice A: Transformada de Hilbert 104
{ }1( ) F sinal( ) ( ) ( )v t i f U f t−= − ⋅ (55)
A equação acima representa uma maneira elegante e precisa para o
cálculo da transformada de Hilbert de um sinal real unidimensional discreto.
Usando a transformada de Fourier direta e inversa, este cálculo pode ser
implementado de forma eficiente usando alguma implementação de FFT. Na
nossa implementação utilizamos a equação acima juntamente com a biblioteca
FFTW para implementar a transformada de Hilbert.










![Um Estudo das Técnicas de Obtenção de Forma a …webserver2.tecgraf.puc-rio.br/~mgattass/teses/2005Dissertacao... · [28] Carihill [30] Tajima. Métodos de Codificação de Luz](https://img.document.onl/doc/110x75/5ba9fb0609d3f221798b7613/um-estudo-das-tecnicas-de-obtencao-de-forma-a-mgattassteses2005dissertacao.jpg)