Embed Size (px)
Citation preview

INPE-12256-TDI/981
SÍNTESE GENÉTICA DE REDES NEURAIS ARTIFICIAIS ART2 NA CLASSIFICAÇÃO DE IMAGENS ASTER
PARA MAPEAMENTO DE USO E COBERTURA DA TERRA NA REGIÃO NORTE DO MATO GROSSO
Eddy Hoover Mendoza Rojas
Dissertação de Mestrado do Curso de Pós-Graduação em Sensoriamento Remoto, orientada pelo Dr. João Roberto dos Santos, aprovada em 16 de fevereiro de 2004.
INPE São José dos Campos
2005

528.711.7:681.3.019 (817.2) MENDOZA ROJAS, E. H. Síntese genética de redes neurais artificiais ART2 na classificação de imagens ASTER para mapeamento de uso e cobertura da terra na região norte do Mato Grosso / E. H. M. Rojas. – São José dos Campos: INPE, 2004. 124p. – (INPE-12256-TDI/981). 1.Redes neurais. 2. Uso da terra. 3.Amazônia. 4.Algoritmo genético. 5.Sensores remotos. I. Título.



“Somente depois que a ultima árvore for derrubada, o último peixe for morto, o último rio envenenado, o homem verá que dinheiro não se come”.
PROVÉRBIO INDÍGENA


A minha família e a Deus ofereço.


AGRADECIMENTOS
Ao Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq) e ao Programa de Estudantes Convênio/Pós-Graduação (PEC/PG) com processo N° 190012/02-1, pelo auxilio financeiro de dois anos de bolsa de mestrado. Ao Center Applied Biodiversity Science (CABS) e a Conservation International Perú (CI-Peru), pelo ajuda financeira de viagem ao Brasil para o início do curso de pós-graduação. Ao Instituto Nacional de Pesquisas Espaciais (INPE-MCT) e à Coordenação Acadêmica da Pós-Graduação em Sensoriamento Remoto, pela oportunidade de estudos, utilização de suas instalações e suporte da pesquisa. Ao Earth Remote Sensing Data Analysis Center (ERSDAC-Japão), pelo apoio na cessão das imagens ASTER dentro do projeto “Validation of ASTER images for vegetation and land use mapping in the tropical forest area, Brazilian Amazon”, aprovado no ASTER Announcement of Research Opportunity – Agreement n° H140250. Ao Serviço Geológico Minero Argentino (SEGEMAR) e o projeto GEOSAT-AR, pelo apoio e suporte no uso das imagens ASTER, especialmente aos pesquisadores Graciela Marin, Diego Azcurra e Silvia Castro. Aos pesquisadores Dr. Antônio Nuno de Castro Santa Rosa e Dr. Nilton Correia da Silva, do Departamento de Recursos Minerais do Instituto de Geociências da Universidade de Brasília (UnB), pelo desenvolvimento e cessão do programa Síntese Genética de Redes Neurais Artificiais (SGRNA). À Fundação Estadual de Meio Ambiente do Estado de Mato Grosso (FEMA-MT) e à empresa ELABORE da cidade de Sinop-MT, pelo apoio logístico no trabalho de campo. Ao meu orientador acadêmico Dr. João Roberto dos Santos, por suas sugestões e contribuições, assim como o apoio, a paciência, a confiança e a grande amizade. A Luciana Spinelli, Paulo Graça e Patrícia Guedes, pelo apoio na coleta de informações de campo, amizade e apoio na elaboração deste trabalho. Aos meus colegas de turma, pela amizade e confiança oferecidas no dia a dia de trabalho. A meus pais Alfonso e Elizabeth, a minha esposa Giovanna, minha filha Adriana e meu irmão José, pelo amor e compreensão e apoio nos momentos de dificuldade e felicidade, sem os quais não poderia ter realizado este trabalho.


RESUMO
O presente trabalho tem como objetivo a utilização de uma síntese genética de rede neural artificial não supervisionada Adaptive Resonance Theory (ATR2) na classificação de imagens ASTER para o mapeamento de uso e cobertura da terra em uma área de floresta tropical. A área de estudo está localizada na região norte do Estado do Mato Grosso e é caracterizada por forte processo de ocupação e mudança da paisagem, ocasionada por ações antrópicas como desflorestamento, extração seletiva de madeira e agricultura. Os dados de campo foram obtidos nos meses de maio e junho de 2003. O uso dos dados do sensor Terra/ASTER possibilitou o incremento na análise do processo de ocupação nas áreas de floresta tropical, devido principalmente a sua melhor resolução espacial e espectral, apresentando-se como uma alternativa aos tipos de dados de sensores atualmente disponíveis no mercado. Os parâmetros de entrada para a rede ART2 foram otimizados por algoritmo genético e também foi avaliado seu desempenho no processo da classificação temática dos alvos em relação à verdade terrestre. Os resultados mostraram que através da rede ART2 as diversas classes temáticas definidas em campo foram classificadas de maneira satisfatória. As bandas que possibilitaram maior diferenciação dos alvos foram as bandas 2 (630-690 nm), 3 (760-860 nm), e 4 (1600-1700 nm), enquanto que as bandas 8 (2295-2365 nm) e 6 (2185-2225 nm) complementaram para a identificação dos alvos em estudo. Finalmente avaliando as mudanças ocorridas entre os anos 2002 e 2003, pôde-se observar que houve uma diminuição da área de floresta devido ao aumento de áreas destinadas para agricultura ou pastagens.


GENETIC SYNTHESIS OF ARTIFICIAL NEURAL NETWORKS ART2 IN THE CLASSIFICATION OF ASTER IMAGES FOR LAND USE AND LAND
COVER MAPPING IN THE NORTH AREA, MATO GROSSO STATE
ABSTRACT
The present work has the objective shows the applicability of the genetic synthesis of the unsupervised artificial neural network ART2 (Adaptive Resonance Theory) in the classification of ASTER images data for the land use and land cover mapping. The study area is located in the north Mato Grosso State, Brazil and is characterized by the strong human occupation process that caused changes in the landscape, by deforestation, selective logging and agricultural. The field data was acquired in May-June of 2003. The use of ASTER images made possible an improved analysis of the occupation process in tropical forest areas. ASTER images have adequate spatial and spectral resolution and are an alternative to the remaining remote sensing data available. The input parameters for the net ART2 were optimized by genetic algorithm and the net was evaluated through comparison of classification results with field data. The results showed a satisfactory classification of ASTER images using ART2. ASTER bands 2 (630-690 nm), 3 (760-860 nm), and 4 (1600-1700 nm) allowed increased differentiation of classes, while bands 8 (2295-2365 nm) and 6 (2185-2225 nm) were complementary for the identification of classes. The main land use changes that occurred between 2002 and 2003 were related to deforestation since many areas of tropical forest were replaced by agriculture and pastures.


SUMÁRIO
Pág.
LISTA DE FIGURAS
LISTA DE TABELAS
CAPÍTULO 1 ................................................................................................................ 19
INTRODUÇÃO ............................................................................................................ 19
CAPÍTULO 2 ................................................................................................................ 23
FUNDAMENTAÇÃO TEÓRICA............................................................................... 23 2.1 Dinâmica Florestal na Amazônia ............................................................................. 23 2.2 Sensoriamento Remoto Aplicado ao Estudo da Cobertura Florestal e Uso do Solo 28 2.3 Sensor ASTER.......................................................................................................... 31 2.3.1 Estado de operação do ASTER ............................................................................. 33 2.3.2 Uso e aplicações dos dados ASTER...................................................................... 34 2.4 Redes Neurais Artificiais (RNA’s)........................................................................... 35 2.4.1 Redes Auto-Organizativas..................................................................................... 37 2.4.1.1 Redes ART (Teoria da Ressonância Adaptativa) ............................................... 38 2.4.1.2 Redes ART2 ....................................................................................................... 39 2.5 Algoritmos Genéticos (AG’s)................................................................................... 43 2.6 Tratamento de Imagens Digitais............................................................................... 45 2.6.1 Correção geométrica e registro de imagens........................................................... 46 2.6.2 Correção atmosférica............................................................................................. 47 2.6.3 Retificação radiométrica........................................................................................ 48 2.7 Classificação de Imagens Digitais por Redes Neurais ............................................. 49 2.7.1 Aplicações de RNA’s em classificação de uso e cobertura da terra...................... 51 2.8 Pós-classificação....................................................................................................... 52 2.9 Avaliação da Exatidão da Classificação................................................................... 53
CAPÍTULO 3 ................................................................................................................ 57
ÁREA DE ESTUDO..................................................................................................... 57 3.1 Localização............................................................................................................... 57 3.2 Características Fisiográficas ..................................................................................... 58 3.2.1 Vegetação .............................................................................................................. 58 3.2.2 Clima ..................................................................................................................... 58 3.2.3 Solos ...................................................................................................................... 59 3.2.4 Geomorfologia e Geologia .................................................................................... 59 3.3 Uso Atual da Terra ................................................................................................... 59
CAPÍTULO 4 ................................................................................................................ 65
MATERIAIS E MÉTODO .......................................................................................... 65 4.1 Materiais ................................................................................................................... 65 4.1.1 Dados orbitais ........................................................................................................ 65

4.1.2 Dados cartográficos ............................................................................................... 66 4.1.3 Softwares utilizados............................................................................................... 66 4.2 Metodologia.............................................................................................................. 66 4.2.1 Técnicas de Pré-processamento............................................................................. 67 4.2.1.1 Correção das bandas SWIR ................................................................................ 67 4.2.1.2 Compatibilização das resoluções espaciais das bandas VNIR e SWIR ............. 67 4.2.1.3 Confecção do mosaico de imagens ASTER....................................................... 68 4.2.1.4 Correção geométrica........................................................................................... 69 4.2.1.5 Correção atmosférica.......................................................................................... 69 4.2.1.6 Retificação radiométrica..................................................................................... 69 4.2.2 Trabalho de campo ................................................................................................ 71 4.2.3 Classificação por rede neural ART2...................................................................... 72 4.2.3.1 Pós-classificação................................................................................................. 78 4.2.4 Análise estatística das imagens temáticas ............................................................. 78
CAPÍTULO 5 ................................................................................................................ 79
RESULTADOS E DISCUSSÃO ................................................................................. 79 5.1 Caracterização das Áreas de Cobertura Vegetal e Uso da Terra.............................. 79 5.2 Aplicação das Técnicas de Pré-Processamento ........................................................ 86 5.2.1 Fenômeno “cross-talk”.......................................................................................... 86 5.2.2 Correção geométrica.............................................................................................. 88 5.2.3 Correção atmosférica............................................................................................. 89 5.2.4 Retificação radiométrica........................................................................................ 90 5.3 Classificação das Imagens ........................................................................................ 92 5.3.1 Análise da resposta espectral das classes temáticas .............................................. 92 5.3.2 Separabilidade das classes ..................................................................................... 94 5.3.3 Classificador ART2 ............................................................................................... 96 5.3.4 Pós-classificação.................................................................................................. 100 5.4 Avaliação da Exatidão na Classificação por Rede Neural ART2 .......................... 100 5.5 Avaliação Temporal das Imagens 2002 e 2003...................................................... 106
CAPÍTULO 6 .............................................................................................................. 107
CONCLUSÕES E RECOMENDAÇÕES ................................................................ 107
REFERÊNCIAS BIBLIOGRÁFICAS ..................................................................... 109
APÊNDICE A ............................................................................................................. 117
MATRIZES DE ERRO E INDICADORES DE EXATIDÃO PARA AS DIFERENTES CLASSIFICAÇÕES ........................................................................ 117
APÊNDICE B.............................................................................................................. 121
MAPAS DE USO E COBERTURA DA TERRA .................................................... 121

LISTA DE FIGURAS
2.1 - Bandas espectrais do ASTER................................................................................. 32 2.2 - Geometria do VNIR para gerar imagens estéreo. .................................................. 33 2.3 - Arquitetura típica de ART2.................................................................................... 40 3.1 - Localização da área de estudo no Estado do Mato Grosso observada no mosaico
de duas imagens ASTER (bandas 4, 3 e 2)............................................................. 57 3.2 – Área total plantada (em hectares) para os municípios de Cláudia, Itaúba e Sinop, período de 1997-2001............................................................................................ 62 FONTE: adaptada de IBGE (2003). ...................................................................... 62 3.3 – Quantidade produzida (em metros cúbicos), de lenha e madeira em tora para os
municípios de Cláudia, Itaúba e Sinop, período de 1997-2001.............................. 63 FONTE: adaptada de IBGE (2003). ....................................................................... 63 4.1 - Fluxograma das atividades de pesquisa. ................................................................ 67 4.2 - Compatibilização de resoluções espaciais entre imagens VNIR e SWIR da
imagem ASTER...................................................................................................... 68 4.2 - Escolha dos parâmetros do AG e da rede ART2.................................................... 73 4.4 - Parâmetros de treinamento e teste para a rede e imagem de entrada. .................... 74 4.5 - Início do processo de otimização. .......................................................................... 76 4.6 - Final da otimização com os melhores indivíduos desta população........................ 77 4.7 – Resultado da classificação e os parâmetros utilizados pela rede........................... 78 5.1 – Localização dos pontos de observação e de inventário em maio e junho de 2003.
................................................................................................................................ 85 5.2 – Plano focal do ASTER/SWIR. .............................................................................. 87 5.3 – Imagem ASTER, bandas R9G8B5 com realce de “decorrelation stretch”,
antes (A) e após (B) da aplicação do programa de correção “cross-talk”. ......... 88 5.4 – Curva espectral da água antes e após a correção atmosférica. .............................. 90 5.5 – Comportamento espectral para os alvos correspondentes às classes temá- ticas
definidas para a área de estudo. .............................................................................. 93 5.6 – Homogeneização da imagem classificada do ano 2003, antes (A) e depois (B)
aplicando um filtro mediana 5x5. ......................................................................... 100 5.7 – Mapa de classificação de uso e cobertura da terra da combinação de bandas
[2,3,4] da imagem ASTER para o ano 2003......................................................... 103 5.8 - Mapa de classificação de uso e cobertura da terra da combinação de bandas
[2,3,4,8] da imagem ASTER para o ano 2002. .................................................... 105


LISTA DE TABELAS
2.1 – Importantes agentes de desflorestamento. ............................................................. 26 2.2 - Características gerais dos três subsistemas do ASTER.......................................... 32 2.3 – Qualidade da classificação associada aos valores do coeficiente Kappa. ............. 55 3.1 – Área municipal e área plantada por município (Km2) em 2001. ........................... 60 3.2 – Calendário agrícola para o Estado de Mato Grosso. ............................................. 61 4.1 - Dados das imagens ASTER selecionadas. ............................................................. 65 5.2 – Estatística dos transectos inventariados................................................................. 86 5.3 – Parâmetros para a correção atmosférica no programa ACORN 4.0...................... 89 5.4 – Médias dos alvos claros e escuros em valores de reflectância da imagem de
referência de 2003. ................................................................................................. 90 5.5 – Médias de reflectância dos alvos invariantes claros e escuros antes e após
retificação. .............................................................................................................. 91 5.6 – Equações de regressão utilizadas na retificação radiométrica............................... 92 5.7 – Conjunto de amostras das classes temáticas na imagem de 2003. ........................ 95 5.8 – Medidas de separabilidade entre classes temáticas, método de Divergên- cia
Transformada.......................................................................................................... 95 5.9 – Separabilidade para as nove classes temáticas finais. ........................................... 96 5.10 – Matriz de correlação (imagem 2003)................................................................... 96 5.11 – Parâmetros resultantes do classificador da rede ART2 para as diferen- tes combinações de bandas na imagem de 2003............................................................. 97 5.12 – Relação entre padrões identificados e as respectivas classes temáticas, imagem
2003. ....................................................................................................................... 98 5.13 - Parâmetros resultantes do classificador da rede ART2 para as diferen- tes
combinações de bandas na imagem de 2002. ......................................................... 99 5.14 - Relação entre padrões identificados e as respectivas classes temáticas, imagem
2002. ....................................................................................................................... 99 5.15 – Valores de Exatidão Global e coeficiente Kappa para as classificações geradas a
partir da imagem 2003.......................................................................................... 101 5.16 – Resultados da análise do valor Kappa para cada matriz de erro das cla-
ssificações para 2003. ........................................................................................... 101 5.17 – Resultado na comparação da análise de valor Kappa em diferentes cla-
ssificações para o ano 2003. ................................................................................. 102 5.18 – Valores de exatidão global e coeficiente Kappa para a imagem de 2002. 104 5.19 – Resultados da análise do valor Kappa para cada matriz de erro das cla-
ssificações para 2002. ........................................................................................... 104 5.20 – Resultado na comparação da análise de valor Kappa em diferentes clas- sificações para o ano 2002................................................................................. 104 5.21 – Área (em hectares) e porcentagem por cada classe temática nas ima- gens de
2002-2003............................................................................................................. 106 A 1 - Matriz de erro e indicadores de exatidão para a classificação da imagem
[2,3,4] de 2003...................................................................................................... 117

A 2- Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4,6] de 2003................................................................................................... 117
A 3- Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4,7] de 2003. ................................................................................................................ 118
A 4 - Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4,8] de 2003. ................................................................................................................ 118
A 5 - Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4,8] de 2002. ................................................................................................................ 119
A 6 - Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4] de 2002. ..................................................................................................................... 119

19
CAPÍTULO 1
INTRODUÇÃO
A dinâmica de uso e cobertura da terra na Amazônia é ocasionada por diferentes
processos antrópicos como as práticas de derrubada florestal e queima para implantação
de projetos agrícolas e de pecuária, a abertura de estradas, a exploração madeireira e
mineradora, a exploração de gás e petróleo, entre outros. O conhecimento e
monitoramento do processo de degradação da paisagem florestal torna-se importante
como subsídio para as ações governamentais de uso sustentável dos recursos florestais e
preservação da biodiversidade, pois este processo continua num fluxo crescente.
O Instituto Nacional de Pesquisas Espaciais (INPE) vem realizando anualmente a
quantificação, utilizando imagens Landsat/TM, do desmatamento na Amazônia
brasileira. Este estudo estima um desflorestamento da ordem de 25.400 km2 para o
período de 2001-2002, onde os maiores incrementos no desflorestamento estão situados
nos Estados do Pará, Mato Grosso e Maranhão (INPE, 2003).
Este projeto de Monitoramento Ambiental da Amazônia está inserido no Programa do
Ministério da Ciência e Tecnologia denominado “Ciência e Tecnologia para Gestão de
Ecossistemas”, com o entendimento em suas diretrizes de que o uso de sensores remotos
é ferramenta fundamental para o estudo e avaliação deste processo, servindo como fonte
de informação para a definição de alguns critérios e indicadores ecológicos no
estabelecimento de uma política de controle e fiscalização mais eficientes.
O sensor Terra/ASTER tem potencial para melhorar estes estudos, razão da suas
características de resolução espacial, espectral e radiométrica. É também uma fonte
complementar de dados e informações derivadas dos sensores atualmente em operação
(NOAA/AVHRR, Aqua/MODIS, SPOT-5/HRG, Radarsat, IRS, e mais recentemente
CBERS-2), como subsídio aos estudos que envolvem diferentes avaliações em escalas
regional e local. Não existem trabalhos usando o sensor ASTER em estudos de

20
formações florestais, tipos de cobertura e uso da terra aplicados na Amazônia, o que
vem justificar o interesse investigativo desta atual pesquisa.
Os procedimentos de classificação automática de dados multiespectrais têm sido
aplicados em variadas situações e novos algoritmos de classificação vêm sendo
desenvolvidos e avaliados com a finalidade de identificar os diferentes tipos de regiões
homogêneas da superfície terrestre. Segundo Ryan et al. (1991), as tentativas prévias de
automatizar o processo de extração de feições têm conduzido a uma “caixa de
ferramentas” de algoritmos, sendo que muito deles dependem, de algum modo, da
classificação de regiões de uma imagem em categorias, de modo que possam fornecer
subsídios aos processos de tomada de decisão.
Nos últimos anos, tem-se observado um interesse renovado pelo uso de Redes Neurais
Artificiais (RNA’s) aplicadas ao reconhecimento de padrões. Nessa perspectiva, Lee et
al. (1990) relatam que as redes neurais parecem desempenhar a tarefa de classificação
de imagens bem ou melhor que as técnicas estatísticas, uma vez que não requerem que a
natureza paramétrica da distribuição dos dados a ser classificados seja explícita.
Existem atualmente vários modelos de redes neurais artificiais desenvolvidos para as
mais diversas aplicações, entre elas podemos citar as perceptron por camadas, auto-
organizativas, por aprendizagem, por retropropagação, entre outros.
O uso das RNA’s na interpretação de dados de sensores remoto está sendo motivado
pela idéia que o cérebro humano é muito eficiente no processamento de grandes
quantidades de dados proveniente de uma variedade de diferentes fontes sensoriais. Por
isso, as RNA’s estão baseadas em uma arquitetura de elementos de processamento
simples de entrada e saída, parecido aos neurônios no cérebro humano, e estão
demonstrando sucesso em uma ampla variedade de aplicações, incluindo processamento
e interpretação de dados de sensores remotos (Atkinson e Tatnall, 1997).
O objetivo geral deste trabalho é utilizar uma síntese genética de rede neural artificial
não supervisionada ART2 para o mapeamento de uso e cobertura da terra em uma área
da região norte do Estado de Mato Grosso, utilizando os dados das imagens geradas
pelo sensor Terra/ASTER, através das bandas do visível, infravermelho próximo e

21
médio (VNIR e SWIR). Em complementação, será executada uma análise temporal dos
dados das imagens ASTER para os anos de 2002 e 2003 para investigar as mudanças no
uso e cobertura da terra na área de estudo.
Definem-se os seguintes objetivos específicos:
- Analisar as bandas VNIR e SWIR das imagens ASTER na discriminação
espectral das classes de uso e cobertura da terra;
- Avaliar o desempenho dos parâmetros iniciais da otimização genética e da rede
neural ART2 no reconhecimento de padrões para dados do sensor ASTER;
- Analisar o desempenho da rede neural ART2 na classificação temática em
relação aos dados do trabalho de campo utilizando procedimentos de estatística
Kappa;
- Realizar uma análise temporal com dados dos anos 2002 e 2003 com a
finalidade de investigar a dinâmica de ocupação do espaço físico, avaliando as
mudanças nas classes temáticas identificadas pela rede neural ART2 para ambas
datas.

22

23
CAPÍTULO 2
FUNDAMENTAÇÃO TEÓRICA
2.1 Dinâmica Florestal na Amazônia
A dinâmica florestal ocasionada por processos de desflorestamento e ocupação da
Amazônia tem chamado atenção desde o início dos anos 70. Este fenômeno tem sido
associado às mudanças climáticas globais, dinâmica de uso e cobertura da terra, e
diminuição da biodiversidade deste ecossistema.
Dos cinco milhões de km2 da Amazônia Legal Brasileira, os 3.370.00 km2 ocupados por
floresta tropical úmida e sazonal, representavam o 66% da floresta original
remanescente no mundo (Fearnside, 1982). Este ecossistema representado por sua alta
diversidade em espécies de animais e vegetais é um dos maiores biomas do planeta.
A ocupação da Amazônia é antiga, em larga escala tem seu início a partir de 1970 com
as políticas de ocupação do território promovidas pelo governo brasileiro,
principalmente associado aos projetos de construção de estradas, como por exemplo:
Belém-Brasília, Transamazônica, Cuiabá-Porto Velho, Cuiabá-Santarém, além das
estradas secundárias.
Podemos afirmar em geral, que existe um conjunto de fatores que promovem esta
dinâmica florestal ocasionado por processos antrópicos, tais como a política de
incentivos fiscais para instalação de grandes projetos agropecuários e assentamentos de
colonos; a construção de estradas; a intensa atividade de desflorestamento, em especial
a extração seletiva de madeira; e a conversão das áreas de floresta em pastagem e áreas
agrícolas.
Além disso, existem fatores condicionantes neste processo de desflorestamento como:
crescimento populacional, necessidade de terra, desigualdades sociais, política fundiária
24
e regime de direito de propriedade, políticas governamentais, tecnologia inadequada,
relações de comércio internacional, entre outros (Lambin, 1994).
Acredita-se que a agricultura itinerante responde por cerca de um terço do
desflorestamento na Amazônia, enquanto a expansão e manejo de pastagens para o gado
é responsável por pelo menos a metade do desflorestamento ocorrido na segunda
metade da década de 90 (Serrão et al., 1996).
As antigas práticas agrícolas tinham no sistema de corte e queima uma alternativa para o
cultivo em solos de baixa fertilidade e ácidos que dominam grande parte da Amazônia,
porém a fertilidade alcançada com a queima da floresta é temporária, onde a infestação
por pragas nas áreas agrícolas reduz ainda mais a produtividade (Nepstad et al., 1999).
Segundo Teixeira (2001), nos últimos anos a agricultura comercial em larga escala tem
sido incentivada para culturas de exportação. Neste contexto, a expansão da soja nas
regiões de Centro-Oeste e Norte tem sido a causa direta de extensos desflorestamentos
na Amazônia brasileira, atingindo vastas áreas de cerrados e florestas de transição
(regiões de alta diversidade e endemismos).
As florestas também são derrubadas e queimadas para a formação de pastagens.
Raramente as pastagens são formadas sem a queima da floresta, já que as cinzas geradas
são vitais nos processos químicos da fertilidade do solo, para a formação da pastagem.
Além disso, o fogo é a forma mais barata de limpar a área para o plantio da pastagem
(Nepstad et al., 1999).
Na fronteira meridional da Amazônia brasileira, com os projetos de colonização
iniciados nos anos de 1970, centenas de criadores de gado do sul do país migraram para
a região e rapidamente derrubaram e queimaram extensas áreas de florestas para
introdução das pastagens. O processo de desflorestamento ocorre, muitas vezes, como
resultado da cooperação entre madeireiros e fazendeiros para a abertura e manutenção
de estradas e para o corte das árvores e limpeza da área. A cultura sulista de formar
pastagens para criação de gado continua prevalecendo na expansão da ocupação de
terras na região Amazônica (Teixeira, 2001).
25
Para o caso da exploração madeireira, considera-se a extração de madeira em tora como
uma causa direta da degradação florestal mas não do desflorestamento (corte raso da
floresta), tendo em vista tratar-se de extração seletiva de algumas poucas espécies de
interesse comercial. Segundo Teixeira (2001), a degradação é resultante da abertura de
uma densa malha de estradas e trilhas para a retirada das toras, dos danos causados a
outras espécies durante o corte e a queda das árvores e do modo imediatista e predatório
pela qual a extração é realizada (sem um manejo que permita a regeneração natural e
conservação genética das espécies extraídas).
Segundo Nepstad et al. (1999), a atividade madeireira na Amazônia elimina ou danifica
de 10 a 40% da biomassa viva da floresta e aumenta a possibilidade de incêndios pela
redução entre 14 e 50% do dossel, permitindo a entrada de luz do sol e, portanto, a
redução de umidade, com o ressecamento da matéria orgânica acumulada no interior da
floresta.
Na Tabela 2.1 apresenta-se a lista dos mais importantes agentes que são considerados
responsáveis pelas principais causas do desflorestamento na Amazônia.

26
TABELA 2.1 – Importantes agentes de desflorestamento.
AGENTES RELAÇÕES DE DESFLORESTAMENTO
Pequenos agricultores (lavoura
de corte e queima)
Cortam a floresta para cultivos de subsistência e venda
no mercado
Grandes fazendeiros
(agricultura comercial)
Cortam a floresta para introduzir plantas comerciais,
algumas vezes desalojando pequenos produtores que,
por sua vez, se movem para outras áreas florestais.
Criadores de gado Cortam a floresta para cultivar pastagens, algumas
vezes desalojando pequenos produtores que se movem
para outras áreas da floresta.
Madeireiros Retiram a madeira comercial, danificam o ecossistema,
expulsam populações nativas que vivem do
extrativismo e abrem estradas que dão acesso a outros
usuários da terra.
Planejadores de projetos de
colonização ou assentamento
Relocação de pessoas dentro de áreas florestadas
Agentes de desenvolvimento
de infraestrutura
Novos acessos para outros usuários da terra com a
construção de estradas e ferrovias em áreas florestadas,
inundações para construção de hidroelétricas.
FONTE: adaptada de Roper at al. (1999).
Segundo Batistella (2001), técnicas metodológicas direcionadas a este processo de
desflorestamento de ampla escala estão sendo avaliadas e estimativas relacionadas ao
índice e extensão do desflorestamento são elaborados com precisão maior. Atualmente,
os efeitos do desflorestamento amazônico, tal como a acumulação de dióxido de
carbono na atmosfera, têm sido considerados como prioridade nos estudos de mudanças

27
globais. O autor menciona que a comunidade científica está agora enfrentando
problemas em calcular a taxa de liberação de carbono, pela complexidade do fenômeno,
como ocorreu no passado com a quantificação do desflorestamento.
Os últimos estudos baseados em sensores remotos demonstram que a região vem
desflorestando aproximadamente 0,52% ao ano no período 2000 e 2001, com os Estados
de Mato Grosso e Maranhão apresentando incrementos maiores, da ordem de 1,96% e
1,89% respectivamente (INPE, 2003). Complementarmente às estimativas anuais da
degradação, estudos vêm sendo conduzidos para avaliar os processos sociais,
econômicos e ecológicos envolvidos durante o processo de desflorestamento (Brondizio
et al., 1994; Moran et al., 1994).
A heterogeneidade de um território muito amplo foi reconhecida em diferentes estudos.
Entre outros elementos regionais, tipos de rios amazônicos foram diferenciados em
águas brancas, águas claras e águas negras (Sioli, 1984). Os solos foram divididos em
três principais categorias: solos bem drenados, irregularmente drenados e pouco
drenados (Sombroek, 1984). Outros autores como Pires e Prance (1985) descreveram
diferentes tipos de vegetação e por último alguns estudos levaram em consideração a
dimensão humana e a heterogeneidade ambiental (Moran e Herrera, 1984; Balée, 1989).
Como conseqüência deste conhecimento crescente sobre a região, diferentes esquemas
de desenvolvimento e sistemas de produção foram descritos e discutidos:
agrosilvicultura, pastagem, agricultura itinerante, extração seletiva de madeira e
agricultura com introdução de fertilizantes, entre outros (Nepstad et al., 1999).
Inserido neste processo dinâmico, várias técnicas modernas de avaliação ambiental
foram desenvolvidas. A integração de sensoriamento remoto e sistemas de informação
geográfica (SIG) trouxe à discussão espacial uma visão mais ampla do desenvolvimento
amazônico (Adams et al., 1995; Alves et al., 1999). Também, classificações de tipos de
uso e cobertura da terra mais detalhada obtidas por dados de campo, enfatizam a função
de regeneração em paisagens amazônicas. Enquanto o desflorestamento acontece, uma
vegetação secundária também aparece, assim, assuntos como regeneração de vegetação

28
e dinâmica do estádio sucessional deveriam ser parte das investigações sobre o uso e
cobertura da terra na região (Moran et al., 1996).
Na compreensão das variáveis que afetam os padrões de sucessão da floresta, precisa-se
conhecer a história do processo da dinâmica florestal. Atualmente, os sensores remotos
têm incrementado significativamente a capacidade de monitorar os processos de
mudanças de tipos de uso e cobertura da terra. Classificações de coberturas terrestres
que usam estas ferramentas são fundamentais para o entendimento e monitoramento do
desflorestamento e da sucessão secundária, especialmente nas regiões tropicais (Moran
et al., 1996; Steininger, 1996).
A integração destes métodos de análise como sensoriamento remoto e
geoprocessamento, mais os dados de campo sobre estrutura florestal, composição da
vegetação e investigações ecológicas, fornecem novas oportunidades para o estudo da
dinâmica florestal. Além disso, para avaliações regionais e de paisagem, o estudo da
estrutura de vegetação em florestas tropicais é mais efetivo que a composição florística
por causa das respostas espectrais das comunidades de vegetação nas imagens geradas
pelos sensores remotos.
2.2 Sensoriamento Remoto Aplicado ao Estudo da Cobertura Florestal e Uso do
Solo
O levantamento do uso e cobertura da terra é de grande importância, na medida em que
os efeitos do uso desordenado causam deterioração do ambiente. Os processos intensos
de erosão, as inundações, os assoreamentos desenfreados de reservatórios e cursos
d’água são conseqüências do uso inadequado da terra (Lorena, 2001).
Segundo Pereira et al. (1994), o levantamento e mapeamento do uso e cobertura da terra
de uma dada região são importantes porque apresentam a distribuição espacial das
atividades de exploração e conservação na área. Esta informação associada àquela da
capacidade de suporte do terreno serve de base para o planejamento de ocupação
antrópica das terras, de forma racional.
29
Atualmente, a boa disponibilidade de dados em função do número de plataformas
orbitais em operação, tem contribuído para os estudos de caracterização e mapeamento
dos diferentes alvos que ocorrem na superfície terrestre, especialmente em áreas onde se
produzem modificações na cobertura vegetal, em função do uso da terra urbana e rural.
Em ambientes tropicais úmidos, os estudos realizados até a atualidade, que são
numerosos, representam hoje uma fonte valiosa de informação sobre esses ecossistemas
que vem sofrendo rápidas mudanças. O desempenho obtido nos estudos relacionados à
cobertura vegetal e no uso da terra na Amazônia teve suporte em trabalhos pioneiros
utilizando dados Landsat/MSS e Landsat/TM, entre os quais citam-se aqueles
desenvolvidos por Santos et al. (1983).
Alguns trabalhos combinam ainda métodos que procuram analisar dados históricos
através de técnicas de geoprocessamento. Watrin et al. (1996), manipularam dados de
sensoriamento remoto combinados com dados de campo, num estudo multitemporal da
cobertura vegetal e de uso da terra, numa área com aproximadamente 786 km2 no
nordeste do Pará. Esses autores mapearam quatro classes temáticas, analisando a
dinâmica destas classes através de técnicas de geoprocessamento.
Brondizio et al. (1993), utilizaram imagens multitemporais Landsat/ TM integradas com
assinaturas espectrais, levantamento florístico-estrutural da vegetação e reconstituição
etnográfica da história de uso da terra, para o mapeamento da vegetação e uso do solo
na porção oriental da Amazônia. O papel da sucessão secundária e outras formações
antrópicas representam para a Amazônia um papel fundamental para o entendimento
sobre as atividades de subsistência das populações locais e a sustentabilidade, ao longo
prazo, de modelos de uso da terra.
Entre outros objetivos de monitoramento das paisagens, estão os trabalhos que
procuram relacionar a emissão de gases do efeito estufa, principalmente o CO2 com a
dinâmica do uso e da cobertura do solo em regiões de floresta tropical. Pereira et al.
(1998) utilizaram dados de Landsat/TM para estudar o fluxo líquido de CO2 e sua
relação com alguns parâmetros florestais como: área desflorestada, taxa de
reflorestamento, densidade de carbono na floresta original e na vegetação secundária.

30
Para tanto, procuraram caracterizar diferentes tipos de cobertura vegetal e uso da terra
típicos na Amazônia, quanto à proporção dos componentes sombra, vegetação, solo e
material vegetal não fotossintetizante, derivados das imagens Landsat/TM a partir da
aplicação do modelo linear de mistura espectral.
Trabalhos com o objetivo de melhorar a qualidade das classificações automáticas
utilizando diferentes técnicas como segmentação de imagens por crescimento de
regiões, também têm sido freqüentes. Nascimento et al. (1998) avaliaram técnicas de
segmentação e classificação automática de imagens Landsat/TM no mapeamento do uso
do solo numa área localizada a 70 km ao norte de Manaus (AM) e concluíram que tal
procedimento mostrou-se satisfatório no mapeamento de unidades de paisagem da
Amazônia, com valores de exatidão global entre 84% e 90%, considerando-se quatro
classes temáticas (floresta, capoeira, pastagem e solo nu).
Alves et al. (1998) também testaram técnicas de segmentação seguidas de processo de
classificação por região, na caracterização do uso e da cobertura da terra em uma área
da Amazônia. Os resultados mostraram que a vegetação secundária representa uma
importante fração da área desflorestada.
Escada (2003) aplicou o método de delimitação de regiões para identificar padrões
espaciais observáveis em uma série de imagens temporais Landsat/TM para analisar a
evolução do uso e cobertura da terra, em uma região do Estado de Rondônia para os
anos de 1985-2000.
No entanto, Santos et al. (2002) aplicaram o modelo de mistura espectral usando uma
imagem Landsat/TM para caracterizar e monitorar o desflorestamento e a exploração
madeireira em uma área da Amazônia brasileira para os períodos de 1997-2001. A
análise das imagens e mapas gerados mostrou que a identificação temporal das áreas
desflorestadas e de extração de madeira é reconhecida como resultado do uso
operacional desta técnica.
Hayashi e Alencar (2003) utilizaram uma imagem Landsat/TM dos anos de 1997, 1999
e 2001 para identificar pátios de estocagem de madeira, ao sul da cidade de Santarém-

31
PA, em um trecho da rodovia Cuiabá-Santarém. Estes autores compararam os métodos
de Tasseled Cap e Análise de Principal Componente para identificar os pixels puros que
representem as frações de vegetação, solo e sombra a serem utilizados em um modelo
de mistura espectral. Posteriormente, realizaram uma classificação não supervisionada
Isodata e uma interpretação visual para identificar os pátios de estocagem utilizando a
banda 3 da imagem Landsat/TM. Os resultados mostraram que o método de Análise de
Componente Principal identificou 18% a mais dos pátios de estocagem em relação aos
outros métodos.
Salimon et al. (2003) utilizaram a técnica de classificação supervisionada de distância
mínima em uma imagem Landsat/TM para monitorar as mudanças de uso da terra para
os anos de 1988 a 1997. A classificação foi feita em três tipos de cobertura florestal:
floresta primária, pastagens e florestas secundárias (capoeiras).
Silva et al. (2003) mostraram os uso da técnica de Análise de Vetor Mudança para
monitorar as atividades de extração seletiva de madeira em uma área ao norte do Estado
de Mato Grosso. O resultado mostrou imagens eficientes para identificar a intensidade e
tipo de mudança que ocorre nestas áreas florestais sob influência da extração
madeireira.
2.3 Sensor ASTER
O sensor Advanced Spaceborne Thermal and Reflection Radiometer (ASTER) é um dos
instrumentos a bordo do satélite TERRA, denominado também EOS/AM-1. Foi lançado
no dia 19 de dezembro de 1999 e os dados foram disponibilizados para o público a
partir de Novembro de 2000. O principal objetivo da missão Terra/ASTER é obter
imagens locais, regionais e globais da Terra de alta resolução espacial em 14 bandas
espectrais. É constituído de três subsistemas de telescópio diferentes: Visível e
Infravermelho próximo (VNIR), Infravermelho médio (SWIR), Infravermelho termal
(TIR). A Tabela 2.2 mostra as características básicas destes subsistemas: 14 bandas no
espectro do visível e infravermelho com diferentes resoluções espaciais (VNIR, 15m;
SWIR, 30m; TIR, 90m), cuja configuração espectral está apresentada na Figura 2.1.

32
TABELA 2.2 - Características gerais dos três subsistemas do ASTER.
CARACTERÍSTICAS VNIR SWIR TIR Faixa espectral Banda 1 Banda 4 Banda 10 0,52 – 0,60 µm 1,60 – 1,70 µm 8,125 – 8,475 µm Banda 2 Banda 5 Banda 11 0,63 – 0,69 µm 2,145 – 2,185 µm 8,475 – 8,825 µm Banda 3N Banda 6 Banda 12 0,76 – 0,86 µm 2,185 – 2,225 µm 8,925 – 9,275 µm Banda 3B Banda 7 Banda 13 0,76 – 0,86 µm 2,235 – 2,285 µm 1,025 – 1,095 µm Banda 8 Banda 14 2,295 – 2,365 µm 1,095 – 1,165 µm Banda 9 2,360 – 2,430 µm Resolução espacial (m) 15 30 90Largura da cena (km) 60 60 60Quantização (bits) 8 8 12
FIGURA 2.1 - Bandas espectrais do ASTER. FONTE: adaptada de JPL (2003).
O subsistema VNIR é o único que fornece a capacidade de gerar um par de imagens
estéreo a partir da qual se podem gerar mapas de elevação de terreno. Na Figura 2.2
podemos observar a geometria deste subsistema.

33
FIGURA 2.2 - Geometria do VNIR para gerar imagens estéreo. FONTE: adaptada de Toutin (2002).
O satélite Terra gira numa órbita circular, quase polar a uma altitude de 705 km. A
órbita é síncrona com o sol e cruza pela linha equatorial a hora local de 10:30 da manhã,
voltando à mesma órbita cada 16 dias. Os parâmetros de órbita são os mesmos que os
do Landsat 7, com exceção do tempo de cruzamento no equador.
O sensor ASTER opera por um tempo limitado em partes do dia e noite ao longo de
uma órbita. A configuração completa (todas as bandas em estéreo plus) coleta dados
numa média de 8 minutos por órbita. A configuração reduzida (bandas limitadas,
ganhos diferentes, etc.) pode ser implementada com a solicitação de pesquisadores
interessados (ENGESAT, 2002).
2.3.1 Estado de operação do ASTER
Segundo Yamaguchi et al. (2001), uma das principais limitações dos dados do ASTER é
seu volume de dados alocados nos instrumentos sobre o satélite TERRA, devido aos
limites de memória a bordo e as ligações de comunicação com o Tracking and Data
Relay Satellite System (TDRSS) e as estações terrenas. Fundamentalmente, o ASTER
obtém dados por pedidos de aquisição pelos usuários e geralmente o ASTER adquire

34
aproximadamente 600 cenas (uma cena cobre uma área aproximada de 60 km por 60
km) por dia.
O produto de dados de ASTER de nível 1A (L1A) consiste em dados de imagem bruta e
de coeficientes para correções radiométricas e geométricas não processadas. Os
produtos de dados de nível 1B (L1B) são dados de uma imagem reamostrada por
aplicação de coeficientes de correção a dados de L1A. (Kato et al., 2001).
2.3.2 Uso e aplicações dos dados ASTER
Em termos gerais é esperado que os dados do ASTER contribuam fortemente em
diversas áreas de investigação científica, como por exemplo, na dinâmica de
ecossistemas, no monitoramento de desastres naturais (ocasionados por vulcões,
incêndios, inundações, deslizamento de terra), e na climatologia da superfície da Terra
(JPL, 2003).
Outros exemplos de utilização de dados de ASTER incluem a observação de grandes
cidades, mapeamento litológico por bandas de SWIR, monitoramento de ambientes
costeiros (recifes de coral, sedimentos em suspensão, padrões de temperatura) e geração
de modelos digitais de elevação pela capacidade estéreo de VNIR (Yamaguchi et al.,
2001).
Na área de mapeamento do uso e cobertura vegetal ainda são poucos os trabalhos
desenvolvidos e, em sua maioria realizados por pesquisadores em forma de avaliação
dos dados gerados pelo sensor ASTER. Em Kato et al. (2001), com o objetivo de
realizar um mapeamento de uma área de floresta e uma de várzea em duas regiões do
Japão, fizeram uso de duas imagens ASTER de datas diferentes, compostas de 9 bandas
cada uma, correspondentes ao visível, infravermelho próximo e infravermelho médio.
Usaram uma correção atmosférica e transformaram os números digitais em valores de
reflectância, posteriormente aplicando um índice de vegetação, de solo e de água,
denominado VSW index, geraram uma classificação de máxima verossimilhança
suportada com informação de campo.

35
Esses autores compararam ainda os resultados obtidos do tratamento digital das imagens
ASTER com mapas elaborados anteriormente, constatando uma aproximação temática
maior que 90% para as classes florestais de coníferas e de folhosas.
Mah e Lim (2002), baseados em duas imagens ASTER de datas diferentes mapearam
dois tipos de classes temáticas, além de realizar uma detecção de mudança da vegetação
na área de estudo. Primeiramente, nas imagens ASTER (bandas 1, 2 e 3) foram
aplicados algoritmos de correção geométrica e atmosférica. Para mapear os corpos de
água, utilizaram uma diferença normalizada simples entre as bandas do verde (V) e de
infravermelho próximo (IVp) através da razão (V-IVp)/(V+IVp). Para o mapeamento da
cobertura vegetal, utilizaram se o índice de vegetação de diferença normalizada (NDVI)
definido por: (IVp-V)/(IVp+V). No caso da detecção de mudança, foi realizada uma
operação simples de subtração de imagens NDVI para as duas datas, gerando finalmente
um mapa de mudanças de vegetação.
Apan et al. (2002), utilizaram duas cenas do ASTER do nível 1B (bandas do VNIR e
SWIR) para avaliar sua utilidade na discriminação espectral e mapeamento de solos,
culturas agrícolas e outros tipos de cobertura da terra (pastagem e água) em uma área
rural de Austrália. Utilizaram diversos índices de vegetação: NDVI, IVp/V, IVp-V, raiz
quadrada IVp/V e o método de componentes principais. Também foram selecionadas 15
áreas de treinamento suportados com informação de campo, amostras de solo e
entrevistas aos agricultores. Os resultados mostraram que os dados ASTER provêem
uma adequada discriminação espectral entre o trigo, cevada e o grão de bico.
Finalmente, utilizaram o classificador supervisionado de distância mínima para o
mapeamento da cobertura da terra e entre os índices que obtiveram melhor
separabilidade entre classes foram a razão IVp/V e a raiz quadrada IVp/V.
2.4 Redes Neurais Artificiais (RNA’s)
O final da década de 80 marcou o ressurgimento da área de Redes Neurais Artificiais
(RNA’s), também conhecida como conexionismo ou sistemas de processamento
paralelo e distribuída. Esta forma de computação não algorítmica é caracterizada por

36
sistemas que, em algum nível, relembram a estrutura do cérebro humano (Braga et al.,
1998).
As RNA’s são sistemas paralelos distribuídos e compostos por unidades de
processamento simples (nodos) que computam determinadas funções matemáticas
(normalmente não lineares). Tais unidades são dispostas em uma ou mais camadas e
interligadas por um grande número de conexões, geralmente unidirecionais. Na maioria
dos modelos estas conexões estão associadas a pesos, os quais armazenam o
conhecimento representado no modelo e servem para ponderar a entrada recebida por
cada neurônio da rede (Braga et al., 1998).
Segundo estes autores, nas RNA’s, o procedimento usual na solução de problemas passa
inicialmente por um fase de aprendizagem, onde um conjunto de exemplos é
apresentado para a rede, a qual extrai automaticamente as características necessárias
para representar a informação fornecida. A capacidade de aprender através de exemplos
e de generalizar a informação aprendida é, sem dúvida, o atrativo principal da solução
de problemas através de RNA’s. Não obstante, as RNA’s são capazes de atuar como
mapeadores universais de funções multivariáveis, com custo computacional que cresce
apenas linearmente com o número de variáveis. Outras características importantes são a
capacidade de auto-organização e de processamento temporal que fazem das RNA’s
uma ferramenta extremamente poderosa e atrativa para a solução de problemas
complexos.
Diversos métodos para treinamento de redes foram desenvolvidos, podendo estes ser
agrupados em dois paradigmas principais: Aprendizado Supervisionado e Aprendizado
Não Supervisionado (Braga et al., 1998). Outros dois paradigmas bastante conhecidos
são os de Aprendizado por Reforço (caso particular do supervisionado) e Aprendizado
por Competição (caso particular de não supervisionado).
O aprendizado supervisionado é denominado assim porque a entrada e saída desejadas
são fornecidas pelo usuário e o objetivo é ajustar os parâmetros da rede, de maneira a
encontrar um mapeamento entre os pares de entrada e saída fornecidos. A cada padrão

37
de entrada submetido à rede, compara-se a resposta desejada com a resposta calculada,
ajustando-se os pesos das conexões para minimizar o erro (Braga et al., 1998).
No aprendizado não supervisionado somente os padrões de entrada estão disponíveis
para a rede, ao contrario do aprendizado supervisionado, cujo conjunto de treinamento
possui pares de entrada e saída. A partir do momento em que a rede estabelece uma
harmonia com as regularidades estatísticas da entrada de dados, desenvolve-se nela uma
habilidade de formar representações internas para codificar características da entrada e
criar novas classes ou grupos automaticamente. Este tipo de aprendizado, só se torna
possível quando existe redundância nos dados de entrada, sem essa prolixidade seria
impossível encontrar quaisquer padrões ou características dos dados de entrada (Braga
et al., 1998).
2.4.1 Redes Auto-Organizativas
O objetivo principal de um algoritmo para aprendizagem auto-organizada é descobrir os
padrões significativos ou características nos dados de entrada e fazer está descoberta
sem a interferência do usuário. Dois representantes desta classe são as redes SOM e as
redes ART.
Existem várias aplicações onde é necessário que a rede seja treinada sem que o usuário
interfira. Nestes casos, a única informação fornecida está no conjunto de padrões de
entrada. Desta forma, estas redes definem seus parâmetros por si próprias, sem auxilio
externo. Esta é a idéia central dos modelos auto-organizativos, os quais utilizam o
paradigma de aprendizado não supervisionado. Estes algoritmos utilizam um conjunto
de regras de natureza local para o ajuste dos pesos (Nepomuceno, 2003). Estes tipos de
redes possuem um amplo conjunto de aplicações potenciais em problemas de
reconhecimento de padrões e categorização de dados onde as classes não são conhecidas
a priori.
Segundo Braga et al. (1998), um dos princípios da utilização de modelos auto-
organizativos para problemas de reconhecimento de padrões é o de que padrões que
compartilham características comuns devem ser agrupados, com cada grupo de padrões

38
representando uma e apenas uma classe (embora uma mesma classe possa ser
representada por mais de um agrupamento). Para realizar este agrupamento, um
algoritmo auto-organizativo precisa encontrar características ou padrões significativos
nos dados de entrada, sem auxílio de um analista ou crítico externo. Isto é possível
apenas se houver prolixidade nos dados de entrada. Enquanto a redundância fornece
conhecimentos à rede sobre similaridades e diferenças entre estes dados, a ausência
desta torna impossível encontrar padrões ou características nos padrões.
2.4.1.1 Redes ART (Teoria da Ressonância Adaptativa)
Segundo Silva (2003), as redes neurais artificiais baseadas em modelos ART (Teoria da
Ressonância Adaptativa) são sistemas que auto-organizam padrões de entrada em
classes de reconhecimento, mantendo equilíbrio entre as propriedades de plasticidade
(discriminação) e de estabilidade (generalização). Onde a plasticidade define a
capacidade da rede na criação de novas classes de reconhecimento, e a estabilidade
define a capacidade da rede em agrupar padrões similares na mesma classe de
reconhecimento.
As redes ART são apropriadas para aplicações em reconhecimento e classificação de
padrões. Elas foram projetadas para que o usuário possa controlar o grau de similaridade
entre padrões que são colocados em um mesmo grupo (Valle Filho et al., 1997). Foi
criado por Stephen Grossberg em 1976 e foi também chamada de ART1. Segundo
Braga et al. (1998), uma característica básica da arquitetura de uma rede ART é que,
para cada camada da rede, há uma unidade externa de controle. Estas unidades
determinam o fluxo de dados entre as camadas, a função de habilitar ou desabilitar os
nós da camada de saída e apagar seus estados de ativação.
Apesar de ART ser uma rede não supervisionada, ela possui um mecanismo de controle
do grau de similaridade que é função do parâmetro ρ (limiar de vigilância) cujo valor é
especificado pelo usuário. Quando um novo padrão de entrada não se enquadra a
qualquer grupo já existente este mecanismo provoca a formação de um novo grupo
(Valle Filho et al., 1997). Este limiar de vigilância determina se um padrão de entrada
pode ser incluído em um dos agrupamentos existentes.

39
A rede ART é muito sensível a variações em seus parâmetros durante o treinamento,
onde o parâmetro mais crítico é o limiar de vigilância que controla o número de classes
a serem identificadas no processo de classificação. Se ρ assume um valor baixo (<0.4), a
rede permite que padrões não muito semelhantes sejam agrupados no mesmo cluster,
criando poucas classes. Se à ρ for atribuído um valor alto, pequenas variações nos
padrões de entrada levarão a criação de novas classes. (Braga et al., 1998).
2.4.1.2 Redes ART2
Segundo Valle Filho et al. (1997), na literatura encontra-se muitas referências sobre
diversos tipos de redes neurais artificiais. Entretanto poucos trabalhos sobre as redes do
tipo ART2 foram publicados. A rede ART2 caracteriza-se por permitir o tratamento de
dados analógicos, diferentemente da arquitetura de ART1, que trabalha só com dados
binários. Exemplos de aplicação foram realizados por Gan e Lua (1992) que utilizaram
a rede ART2 no reconhecimento de caracteres chineses e por Rangsanseri et al. (2001)
que fizeram uma comparação entre as redes ART1 e ART2 no processo de segmentação
de imagens Landsat/TM5 e ADEOS.
A arquitetura de ART2, como demonstra a Figura 2.3, pode ser dividida em três
camadas, F1: processamento da entrada; F2: unidade de agrupamento; e mecanismo de
RESET: controla o grau de similaridade. A camada F1 é conectada à camada F2 e vice-
versa através dos pesos zij. Este duplo sentido de conexões é utilizado para controlar a
similaridade dos padrões de um mesmo grupo (Valle Filho et al., 1997).
Segundo Silva (2003), a arquitetura de ART2 é dividida em subcamadas que são
representadas pelos círculos menores e as setas com linhas pontilhadas indicam o fluxo
de dados de uma subcamada para outra. As entradas da rede (ei) acessam diretamente a
subcamada wi. Os núcleos de controle de ganhos (círculos maiores) inibem as
subcamadas de destino proporcionalmente à norma L2 das subcamadas de origem. Os
núcleos de controle de ganhos atuam diretamente nas subcamadas xi, ui e ri no
subsistema de orientação. O triângulo no topo esquerdo representa o subsistema de
orientação e as linhas com finalizações em forma de semicírculos, entre as camadas F1
e F2, representam as memórias de longo prazo (MLP).

40
Os fluxos de dados temporários que são gerados dentro da estrutura de uma rede ART2
são chamados de memórias de curto prazo (MCP). As MCPs são os valores temporários
assumidos pelas subcamadas das camadas F1 e F2. Essas MCPs são necessárias ao
algoritmo de aprendizado incremental a fim de acessar e atualizar as MLPs que irão
caracterizar a auto-organização permanente do sistema. Cada MLP representa um
padrão detectado no conjunto de entradas já apresentadas à rede (Silva, 2003).
FIGURA 2.3 - Arquitetura típica de ART2. FONTE: adaptada de Carpenter e Grossberg (1987).
onde:
e = entrada da rede;
a, b = pesos fixos entre as unidades (ui e wi) e (qi e vi), respectivamente, na
camada F1;

41
cp = peso fixo usado entre pi e ri utilizado no teste de reset. Valores pequenos
para c permitem uma faixa larga para o parâmetro de vigilância (ρ). Exemplo: c
= 0.1.
A subcamada F1 da arquitetura ART2 computa várias normalizações de entradas,
controles de ganhos e operações de casamento de padrões, automaticamente. Estas
operações trabalham em conjunto para satisfazer as múltiplas restrições necessárias para
alcançar a auto-organização de classes numa seqüência arbitrária de entradas analógicas
de maneira assíncrona, estável e em tempo real. Uma entrada também deve ser capaz de
ativar a representação de sua classe diretamente, caso ela exista (Silva, 2003).
O modelo de ART2 possui mecanismos de normalização e filtragem de ruídos incluídos
na camada F1, onde a eliminação de ruídos é controlada pelo parâmetro ρ que ajuda a
rede a se tornar estável. A velocidade de aprendizagem pode ser rápido ou lento, isto
afetando na formação dos grupos e dos vetores de pesos (Valle Filho et al., 1997).
A aprendizagem rápida ou lenta em ART2 pode ser controlada através do parâmetro
α (taxa de aprendizagem). Valores pequenos para α provocam a redução da velocidade
da aprendizagem, mas garante que os pesos alcancem equilíbrio no modo lento e a
distribuição dos padrões nos grupos (Valle Filho et al., 1997).
O início de uma aprendizagem ocorre quando todas as ativações recebem atribuição
zero. O ciclo computacional se inicia na camada F1 a partir das unidades ui que envia
sinais para pi e wi. Cada unidade ui envia um sinal para wi multiplicado pelo peso a. As
unidades wi somam os sinais provenientes de ei e ui. Os sinais que saem de wi são
normalizados antes de entrarem na unidade xi (Valle Filho et al., 1997).
A saída de qi deve ser multiplicada pelo peso fixo b. Portanto o sinal de qi que chega em
vi é dado por b.f(qi). A eliminação de ruídos ajuda à rede na formação de grupos
estáveis. Os sinais que chegam em vi são somados, ou seja:
)xi(f)q(f. i += bVi (2.1)

42
Os sinais vi são normalizados antes de serem enviados para ui. Depois que passam por
ui, os sinais são enviados para ri, pi e wi. Na unidade pi os sinais que vieram de ui são
somados aos sinais que vierem da camada F2 (top-down) se houver alguma unidade
ativa em F2 (Valle Filho et al., 1997).
Quando a camada F1 alcança o equilíbrio, ou seja, quando não ocorre mais alterações
em suas unidades, as unidade pi enviam seus sinais para a camada F2 (bottom-up), ou
seja, os sinais oriundos de F1, através das unidades p, são multiplicados pelos pesos
bottom-up, conforme o seguinte somatório:
pby ii
iji ∑= (2.2)
Segundo Silva (2003), as propriedades básicas da camada F2 são a ampliação de
contraste dos padrões que passam pelo filtro adaptativo F1 → F2 e a inibição do
neurônio ativo quando da ocorrência do sinal de reset gerado pelo subsistema de
orientação.
Em Valle Filho et al. (1997), quando pi recebe sinal de F2 (competição encerrada) um
sinal é enviado para ri que, somado com ui, fornece o reset. Em ART2 a função de reset
é controlar o estado de cada neurônio na camada F2. A aprendizagem ocorre se houver
suficiente similaridade entre os pesos do vencedor em F2 e o vetor de entrada. A
similaridade é considerada suficiente quando:
( )ε−ρ≥ir (2.3 )
e
p.cuep.cur ii
i +++
= (2.4)
onde:
e = previne divisão por zero quando se calcula a norma (valor) de um vetor;

43
ρ = parâmetro de vigilância.
A notação ρ é utilizada para controlar o grau de similaridade entre os elementos de cada
grupo. O parâmetro ρ, juntamente com os pesos iniciais bottom-up, determinam quantos
grupos serão formados e assume um valor entre 0 e 1. Segundo Silva (2003), fixando-
se todos os parâmetros do sistema, uma vigilância alta impõe um critério de junção bem
restritiva, separando o conjunto de entradas em classes finas. Um critério de vigilância
baixo tolera grandes diferenças entre os pesos top-down e bottom-up em F1, levando a
classes mais abrangentes.
2.5 Algoritmos Genéticos (AG’s)
Segundo Braga et al. (1998), os algoritmos genéticos são algoritmos de otimização e
busca baseados nos mecanismos de seleção natural e genética. Enquanto os métodos
tradicionais trabalham de forma seqüencial, ou seja, avaliando a cada instante uma
possível solução, os AG’s trabalham com um conjunto de possíveis soluções
simultaneamente.
O princípio básico do funcionamento dos AG’s é o critério de seleção baseado na teoria
da evolução natural proposta por Charles Darwin em seu livro The Origin of Species,
em 1895, onde manifesta que a evolução das populações naturais através de um número
de gerações ocorre de acordo com os princípios de seleção natural e sobrevivência dos
mais aptos (Holland, 1975). Na terminologia de AG’s, uma solução candidata é
chamada de indivíduo ou cromossomo. Ao conjunto de indivíduos simultaneamente
avaliados é dado o nome de população. Na busca de encontrar as melhores soluções são
realizados processos interativos, onde cada interação é chamada de geração. Durante
cada geração, princípios de seleção e reprodução são aplicados a uma população de
candidatos (Nepomuceno, 2003).
O processo de seleção determina quais indivíduos da população podem participar da
fase de reprodução. Segundo Nepomuceno (2003), é necessário utilizar critérios de
avaliação levando em consideração que: (i) se uma função de avaliação atribuir um
valor muito alto a um indivíduo então este poderá monopolizar a seleção, levando a uma

44
convergência prematura do algoritmo genético; (ii) se a função de avaliação atribuir
valores de aptidão muito próximos aos indivíduos, a seleção pode não favorecer os
indivíduos mais aptos.
Os indivíduos selecionados participam da fase de reprodução, onde podem ser
combinados ou modificados, produzindo os indivíduos da próxima geração. Estas
combinações e modificações são realizadas por um conjunto de operadores genéticos
(Braga et al., 1998).
Os principais operadores genéticos são: cruzamento e mutação. Eles são utilizados para
assegurar que a nova geração apresente novos indivíduos (soluções), mantendo
características desejáveis adquiridas em gerações anteriores.
Segundo Braga et al. (1998), o “crossover” (cruzamento) é o operador responsável pela
recombinação de características genéticas dos pais durante a reprodução, permitindo
que elas sejam herdadas pelas próximas gerações. Ele é considerado o operador
genético predominante, por isso é aplicado com uma probabilidade chamada de taxa de
“crossover”, maior que a taxa de mutação.
O operador de mutação é responsável pela introdução e manutenção da diversidade
genética na população, alterando arbitrariamente um ou mais genes de um cromossomo
escolhido aleatoriamente. Este operador fornece meios para introdução de novos
elementos na população (Braga et al., 1998).
O processo evolutivo termina quando o algoritmo alcança a convergência dos dados se
for obtido um indivíduo adequado ou for realizado um determinado número de
gerações. O algoritmo converge quando cada gene possui o mesmo valor em pelo
menos 95% dos indivíduos (Braga et al., 1998).
Ao utilizar AG’s na solução de um problema é importante analisar como a escolha dos
parâmetros utilizados pode influir no seu comportamento, para que se possa estabelece-
los conforme as necessidades do problema e dos recursos disponíveis, descritos da
seguinte forma por Braga et al. (1998): (a) o tamanho da população afeta o desempenho

45
global e a eficiência dos AG’s. Com uma população pequena, o desempenho pode cair,
pois a população pode cobrir apenas uma pequena parte do espaço de busca. Uma
grande população geralmente fornece uma cobertura representativa do domínio do
problema, além de prevenir convergências prematuras para soluções locais ao invés de
globais. No entanto, para se trabalhar com grandes populações, são necessários maiores
recursos computacionais, ou que o algoritmo trabalhe por um longo período de tempo;
(b) taxa de cruzamento, quanto maior for esta taxa, mais rápida a introdução de novas
estruturas na população. Se esta taxa for muito alta, indivíduos com bons índices de
aptidão poderão ser retirados a uma velocidade que supere a capacidade de gerar
melhores indivíduos. Caso esta taxa seja muito baixa, a busca pode estagnar; (c) taxa de
mutação, um baixo valor de mutação previne que uma dada posição fique estagnada em
um determinado valor, além de possibilitar que se chegue em qualquer ponto do espaço
de busca. Com uma taxa muito alta, a busca se torna essencialmente aleatória; (d) o
intervalo de geração, controla a porcentagem da população que será substituída para a
próxima geração. Com um valor alto, a maior parte da população é substituída, o que
pode levar a perda de indivíduos de alta aptidão. Com um valor baixo, o algoritmo pode
se tornar muito lento, pois o número de gerações necessárias pode ser muito grande.
2.6 Tratamento de Imagens Digitais
As imagens geradas por sensores remotos captam de forma seqüencial a radiância média
de uma área do terreno, equivalente ao tamanho do pixel (picture element). Estas são
constituídas por um conjunto de pixels arranjados de forma matricial, onde cada um tem
uma localização definida em um sistema de coordenadas (linha e coluna) representadas
por “x” e “y” (Crosta, 1993).
Segundo Richards (1995), cada pixel assume um atributo numérico que representa o
nível de cinza, variando de preto ao branco chamado de ND (número digital). Este ND
está relacionado com a média da intensidade da energia eletromagnética refletida ou
emitido pelos diferentes materiais existentes na superfície da Terra correspondente ao
tamanho do pixel.

46
Processamentos de dados de sensoriamento remoto, como operações entre bandas e
aumento linear de contraste, oferecem realce de feições de interesse aos objetivos do
estudo realizado, facilitando a interpretação destas feições. Os dados de sensoriamento
remoto necessitam, contudo de pré-processamento para a redução de distorções das
características espectrais dos alvos imageados, provocados por fatores que interferem no
processo de aquisição desses dados.
O pré-processamento consiste em minimizar algumas características das imagens
digitais não provenientes da cena imageada, como as de produto da natureza do sensor,
deformações geométricas, atmosfera, nuvens, etc.
2.6.1 Correção geométrica e registro de imagens
As formas de distorções geométricas em imagens orbitais podem ser atribuídas a fatores
de diversas naturezas. Dentre esses fatores Richards (1995) destaca a rotação e
curvatura da Terra; erros de instrumentação; padrão de varredura e campo de visada em
sensores; distorção panorâmica; e variações de altitude, atitude e velocidade da
plataforma.
A correção geométrica de imagens de sensores remotos visa eliminar as distorções
sistemáticas, permitindo que se realizem estudos multitemporais, como a integração de
dados de diversas fontes em sistemas de informações geográficas. Deste modo, esta
pode ser feita aplicando modelos matemáticos visando corrigir fontes específicas de
erro, ou buscando relacionar a coordenada do pixel na imagem com um sistema de
coordenada geográfica (Richards, 1995).
Para que as imagens sejam perfeitamente coincidentes no espaço é necessário que
sofram um tipo de transformação espacial conhecida por registro. A relação entre o
mapa e a imagem é feita através de uma função de mapeamento polinomial, podendo
ser de primeira, segunda ou terceira ordem. Os coeficientes de função de mapeamento
são estimados através de um conjunto de pontos identificados no mapa e na imagem,
que referem-se aos pontos de controle, que podem ser interseção de rodovias,

47
cruzamento de drenagem, etc. O número de pontos de controle depende do grau do
polinômio a ser utilizado (Richards, 1995).
O registro pode ser feito com uma reamostragem do vizinho mais próximo (Nearest
neighbour), quando há a necessidade das vantagens da não alteração dos números
digitais (ND) ou níveis de cinza, enquanto que o bilinear calcula a média ponderada
pela distância do ND dos quatro vizinhos mais próximos. A convolução cúbica por sua
vez, utiliza os dezesseis vizinhos mais próximos, apresentando como vantagem uma
imagem esteticamente mais adequada na visualização (Crosta, 1993).
2.6.2 Correção atmosférica
As características da atmosfera causam um espalhamento da radiação, afetando a
resposta espectral captada pelo sensor, o que varia conforme o comprimento de onda.
As bandas do visível são mais afetadas, fazendo com que as partes sombreadas
apresentem um valor mais alto do que o esperado o que provoca uma decorrelação da
sombra entre as bandas (Novo, 1992). Assim, é necessário efetuar tratamento da
imagem para minimizar esse efeito, principalmente quando são realizadas operações
entre bandas, relacionamentos entre dados obtidos por sensores remotos com
parâmetros biofísicos e em estudos multitemporais (Chuvieco, 2002).
Segundo Watrin (1994), apesar da correção dos efeitos atmosféricos ser bastante
complexa, os dados espúrios que acompanham a cena, oriundos principalmente dos
efeitos de espalhamento, podem ser minimizados a partir da aplicação de algumas
técnicas baseadas em modelos matemáticos. Verificou-se que, em geral, a correção
atmosférica diminui a média dos níveis de cinza na imagem, sendo porém esta redução
não uniforme e fortemente dependente do tipo de alvo.
Atualmente existem na literatura diversos métodos de correção atmosférica aplicados
em dados multiespectrais e segundo Chen et al. (1995) estes podem ser realizados a
partir da utilização de modelos que simulam as propriedades ópticas da atmosfera
através de alvos com reflectância conhecida ou através de métodos que utilizam feições
presentes na própria imagem. Pode-se dividir em métodos alternativos (por exemplo,

48
Subtração do Objeto Escuro) e métodos físicos (por exemplo, 6S, MODTRAN,
LOWTRAN, DOS).
No caso dos métodos físicos, torna-se fundamental o conhecimento das propriedades
ópticas da atmosfera e a superfície. Estes métodos são fundamentados na teoria da
transferência radiativa, a fim de que retratem a complexidade da atmosfera, que irá
variar com o tipo de modelo a ser utilizado e o resultado final a que se propõe.
Dos modelos de correção atmosférica existentes e utilizados para dados ASTER
destaca-se o modelo “Moderate Atmospheric Radiance and Transmittance”
(MODTRAN 4). A precisão do método de transferência radiativa e o modelo
atmosférico influenciam diretamente na obtenção da reflectância da superfície (Thome
et al., 1998).
2.6.3 Retificação radiométrica
Os procedimentos de retificação ou normalização radiométrica são necessários quando
se pretende comparar imagens multitemporais de uma mesma área de estudo, obtidas de
diferentes sensores ou de diferentes datas de aquisição e mediante utilização de técnicas
de compressão de dados e de subtração de imagens (Hill e Sturm, 1991).
Esta retificação radiométrica é uma técnica utilizada para eliminar as distorções
radiométricas entre imagens multitemporais e que permite que sejam realizadas
comparações quantitativas com a reflectância dos alvos obtidas das imagens ou até de
medições em campo (Hill e Sturm, 1991).
O procedimento de retificação radiométrica é importante porque não requer o
conhecimento das propriedades atmosféricas e calibração do sensor. Por isso, uma
imagem retificada em relação a uma de referência, deve parecer como se houvesse sido
obtida nas mesmas condições atmosféricas e de iluminação da imagem de referência
(Hall et al., 1991).
Esta retificação pode ser realizada a partir de alvos pseudo-invariantes, que são usados
para encontrar o relacionamento entre cada imagem e uma imagem de referência (Hill e

49
Sturn, 1991). Segundo Caselles e Garcia (1989), imagens de diferentes datas de
aquisição podem ser comparadas ajustando uma função de regressão entre alvos-
referência claros e escuros e assumindo reflectância estável.
Segundo Hall et al. (1991), se em uma cena há elementos de reflectância estáveis
(chamados também alvos pseudo-invariantes), a retificação radiométrica é uma técnica
alternativa útil para normalizar radiometricamente imagens temporais, quando os dados
de profundidade óptica atmosférica ou coeficientes de calibração não estão disponíveis.
Considerando que não houve alteração no uso do solo, pixels com a mesma localização
geográfica em imagens obtidas em diferentes datas correspondem ao mesmo alvo e a
relação entre eles deve ser linear (Du et al., 2001). Dessa maneira, a retificação altera as
condições atmosféricas e de iluminação de uma imagem qualquer para aquelas da cena
usada como referência (Hill e Sturm, 1991).
No trabalho de Olsson (1993) foram testados diferentes tipos de funções de regressão
para uma comparação da calibração temporal relativa dos dados do Landsat/TM. Hill e
Sturm (1991) e Caselles e Garcia (1989) aplicaram a retificação radiométrica em
imagens Landsat usando uma regressão linear, obtida de pares de pixels localizados em
alvos invariantes numa imagem de referência e em a mesma cena de outra data.
O problema que ocorre com os métodos de retificação radiométrica é que, mesmo áreas
que não mudaram podem apresentar uma variação natural na reflectância entre as
aquisições, seja por causa da variação sazonal, ou por causa da diferença de iluminação
ou geometria de visada (Olsson, 1993).
2.7 Classificação de Imagens Digitais por Redes Neurais
Segundo Crosta (1993), a classificação digital de imagens consiste em procedimentos
utilizados para separar e identificar alvos na superfície terrestre usando sistemas
eletrônicos, auxiliando o elemento humano na interpretação das informações contidas
na cena. Desta forma, o processo de classificação digital de imagens multiespectrais tem
por objetivo associar cada pixel ou região de uma imagem a uma determinada classe,

50
descrevendo o tipo de cobertura na superfície terrestre (vegetação, agricultura, solo,
água, áreas urbanas e outras feições de interesse), ou seja, é um processo que extrai
informações da imagem para reconhecer padrões.
A atual geração de satélites está produzindo dados com um enorme potencial de
informação para o uso científico e tecnológico, em grande volume e qualidade espectral,
radiométrica, geométrica e temporal. Por outro lado, todo esse potencial torna
necessário um melhor desenvolvimento metodológico, sobretudo com o objetivo de
estudo ambientais, para o processar, interpretar, analisar e integrar os dados multi-
fontes. Estes desafios estão sendo resolvidos com a compreensão desses dados no que se
refere principalmente à relação sinal/alvo contido nos produtos de sensoriamento
remoto. Neste contexto, as Redes Neurais Artificiais (RNA’s) apresentam-se como uma
ferramenta importante no processamento de imagens de satélite, tornando-se possível
atingir classificações temáticas de adequado desempenho em amplos campos de
aplicações.
As RNA’s, num sentido simples, poderiam ser entendidas como um transformador de
dados, onde o objetivo é associar os elementos em um grupo de dados com os elementos
de um segundo grupo. Segundo Hepner et al. (1990), quando é aplicada uma
classificação, por exemplo, eles são relacionados com a transformação dos dados de
espaço-feição para espaço-classe. Por essa razão, a RNA pertence à mesma classe de
técnicas como reconhecimento automático de padrões, regressão, e classificação
espectral e textural.
Em Atkinson e Tatnall (1997), a rápida aceitação dos métodos de classificação de
RNA’s em sensoriamento remoto em relação a outras técnicas que empregaram certos
classificadores estatísticos convencionais é devida principalmente a sua capacidade
amplamente demonstrada em: a) um maior desempenho na precisão e rapidez,
particularmente quando as feições do espaço têm características complexas e a fonte de
dados tem diferentes distribuições estatísticas; b) incorpora um conhecimento a priori e
barreiras físicas realísticas dentro da análise; c) incorpora tipos diferentes de dados

51
(incluindo os provenientes de outros sensores) dentro da análise, facilitando desse modo
os estudos sinérgicos.
2.7.1 Aplicações de RNA’s em classificação de uso e cobertura da terra
Hepner et al. (1990) aplicaram redes neurais para classificar tipos de cobertura e uso da
terra (água, pastagem, floresta e área urbana) a partir de imagens Landsat TM e
encontraram para diferentes níveis que o método de rede neural foi mais preciso que as
classificações estatísticas tradicionais, como o classificador de máxima verossimilhança.
Kanellopoulos et al. (1992) realizaram um experimento para estimar vinte classes de
cobertura da terra (água, floresta decidual, solo exposto, culturas, entre outros) a partir
de uma imagem SPOT/HRV, encontrando significativo desempenho.
Uma significativa vantagem da RNA é que permite a combinação de dados a partir de
diferentes fontes dentro da mesma classificação ou estimação. Alguns investigadores
têm demonstrado a capacidade das RNA’s para a classificação de dados espaciais de
diversas fontes, por exemplo, Benediktsson et al. (1990), usaram imagem Landsat/MSS
e três grupos de dados topográficos (elevação, declive e forma) para classificar dez
categorias de cobertura da terra (água, campos de altitude, vários tipos de floresta de
pinheiros, dentre outras). Peddle et al. (1994) aplicaram o método neural em dados de
sensores remotos de diversas fontes para classificar tipos de cobertura e uso da terra
(áreas reflorestadas, floresta de pinheiros, áreas arbustivas, floresta de tundra, áreas
áridas, água, dentre outras) na região dos Alpes.
Santos et al. (1995) utilizaram simultaneamente uma segmentação e uma classificação
por rede neural de uma imagem Landsat/TM para a caracterização do uso da terra na
região de Tucuruí (Estado do Para). Conseguiram identificar as seguintes classes
temáticas: floresta, regeneração (inicial e avançada), culturas, pastos e água.
Atualmente vários pesquisadores continuam utilizando RNA’s e obtendo melhores
resultados que os métodos convencionais, Puzzolo et al. (2003), utilizaram duas
imagens SPOT/HRV de bandas 1, 2 e 3 para fazer um estudo multitemporal para o
mapeamento de quatro tipos de floresta em uma área dos Alpes (abetos, pinheiros,

52
coníferas, folhosas). Estes autores obtiveram uma estatística Kappa de 0,68 e 0,78 para
as duas datas. Diverio et al. (2003) baseados em uma imagem CBERS/IR-MSS
identificaram com boa precisão quatro classes de uso e cobertura da terra em uma região
da Amazônia brasileira utilizando um classificador de RNA: água, desflorestamento,
floresta e áreas não florestais.
Mas (2003) utilizou uma RNA para classificar uma imagem Landsat/ETM+ para
mapear uso e cobertura da terra em uma região do México. Este autor conseguiu
classificar seis tipos de cobertura e uso da terra: pastagem, água, manguezal, floresta
tropical, floresta de várzea, área urbana. Nepomuceno (2003) utilizou a RNA em uma
imagem radar banda P para identificar áreas de cobertura da terra em uma região
amazônica, conseguindo classificar áreas de floresta primária, floresta em regeneração,
floresta de várzea, pastagens e solo exposto.
Da Cruz e Galo (2003), baseados em imagens Landsat/TM e CBERS/CCD utilizaram
uma classificação supervisionada através de uma rede neural artificial para mapear tipos
de cobertura da terra em uma área teste do Estado do Paraná entre os anos 1998 e 2000.
Os resultados mostraram que a rede neural treinada e aplicada em dados Landsat/TM do
ano 1998, discriminou as classes mais significativas (florestas, pastagem, solo exposto,
água) presentes na imagem CBERS/CCD de 2000.
2.8 Pós-classificação
Imagens multitemporais classificadas pelo método pixel a pixel às vezes apresentam
uma aparência de ruído devido à variabilidade espectral encontrada na imagem. Uma
das maneiras de solucionar esse tipo de problema é mediante utilização de um algoritmo
de suavização que opera de forma semelhante às técnicas de filtragem, isto é, utilização
de um algoritmo de movimento de janelas. O filtro de maioria é recomendado por
Mather (1999) e Lillesand e Kiefer (2000), para remover os pixels isolados deixados
pela técnica de classificação pixel a pixel, e assim tentar incorporar simultaneamente as
informações contextual e espectral da imagem classificada, com a finalidade de gerar
mapas temáticos que evidenciem as mudanças na cobertura e uso da terra.

53
A forma mais simples do emprego do filtro de maioria é através do uso de uma janela
medindo 3 linhas x 3 colunas centrado em um pixel de interesse, onde o número de
pixels determinados para cada uma das N classes é somado. Segundo Mather (1999) o
algoritmo do filtro de maioria procede da seguinte maneira para agrupar os pixels
isolados a uma classe: se o pixel central não pertencer à mesma classe dos pixels
encontrados em uma janela contendo cinco ou mais pixels, é dado o rótulo ao pixel
central da classe majoritária. Para tanto, o filtro de maioria tem a função de remover
pixels isolados e rotulá-los novamente levando em consideração a freqüência de
ocorrência de rotulação dos seus vizinhos verticais e horizontais.
2.9 Avaliação da Exatidão da Classificação
Independentemente dos dados e métodos que a originaram, uma classificação só pode
ser considerada confiável após a análise da exatidão dos resultados gerados. Onde a
exatidão do processo de classificação encontra-se limitada por fatores como o método
de classificação, a qualidade das imagens utilizadas, o tamanho da unidade de
mapeamento, escala de trabalho entre outros.
Entre os métodos mais utilizados está o coeficiente de concordância Kappa que é uma
técnica de medida de exatidão que pode ser utilizada para determinar se uma matriz de
erro é significativamente diferente de outra (Congalton e Green, 1999). Esta medida é
baseada na diferença entre a exatidão global (indicada pela diagonal da matriz) e a
exatidão de risco do produtor e do consumidor que é indicada pelas somas das linhas e
colunas da matriz de confusão.
O coeficiente Kappa ( k ) é dado pela equação 2.1.
∑
∑∑
=++
=++
=
−
−= r
iii
r
iii
r
iii
xxN
xxxNk
1
2
11ˆ (2.5)
onde: r = número de linhas e colunas da matriz de confusão,

54
xii = número de observações na linha i e coluna i, xi+ = total de observações na linha i, x+i = total de observações na coluna i,
N = número total de observações.
A variância do estimador do coeficiente de Kappa ( )k é dada por (Congalton e Green,
1999) :
( ) ( )( )
( )( )( )
( ) ( )( )
−−−
+−
−−+
−−
= 42
224
21
32
32112
2
11
141
1212
111ˆrav
θθθθ
θθθθθ
θθθ
Nk (2.6)
onde:
∑=
=r
iiix
N 11
1θ (2.7)
∑=
++=r
iii xx
N 122
1θ (2.8)
( )ii
r
iii xxx
N ++=
+= ∑1
231θ (2.9)
( )2
341 ∑ ++ += ijij xxx
Nθ (2.10)
Os resultados obtidos através do cálculo do coeficiente Kappa são comparados pelos
valores da tabela de avaliação de qualidade de classificação, proposto por Landis e
Koch (1977). A Tabela 2.3 apresenta intervalos do coeficiente Kappa associados a
critérios de concordância e seus valores distribuídos entre 0 e 1, onde 1 representa o
valor da concordância máxima, e quando multiplicado por 100, dá a porcentagem da
medida de exatidão da classificação.

55
TABELA 2.3 – Qualidade da classificação associada aos valores do coeficiente Kappa.
Kappa ( k ) Qualidade 0.00 Péssima 0.01 – 0.20 Ruim 0.21 – 0.40 Razoável 0.41 – 0.60 Boa 0.61 – 0.80 Muito Boa 0.81 – 1.00 Excelente
Segundo Congalton e Green (1999), existe um teste estatístico (denominado de Z) para
avaliar a significância de uma matriz de erro simples em relação aos dados de verdade
terrestre. A equação é expressa da seguinte forma:
( )1
1
krav
kz = (2.11)
O teste Z é estandardizado e distribuído normalmente e dada uma hipótese nula H0: K1
= 0 e uma hipótese alternativa H1 : K1 ≠ 0, H0 é rejeitada se 2
ZZ α≥ , onde α/2 é o nível
de confiança do teste Z. Para um nível de confiança de 95% o valor crítico deveria ser
1,96. Nesse caso se o valor de Z for maior que 1,96, o resultado é significativo e existe
concordância entre a classificação e a verdade terrestre.
Também com o teste estatístico Z é possível determinar se dois valores de Kappa
independentes (k1 e k2) são significativamente diferentes. O teste estatístico é
expressado por:
( ) ( )21
21
ˆravˆrav
ˆˆ
kk
kkz
+
−= (2.12)
Para a equação anterior, o teste Z é estandardizado e distribuído normalmente e dada
uma hipótese nula H0: K1 = K2 e uma hipótese alternativa H1 : K1 – K2 ≠ 0, H0 é
rejeitada se 2
ZZ α≥ . Para um nível de confiança de 95% o valor crítico deveria ser

56
1,96. Desta forma, se o valor de Z for maior que 1,96, as duas classificações serão
diferentes estatisticamente (Congalton e Green, 1999).
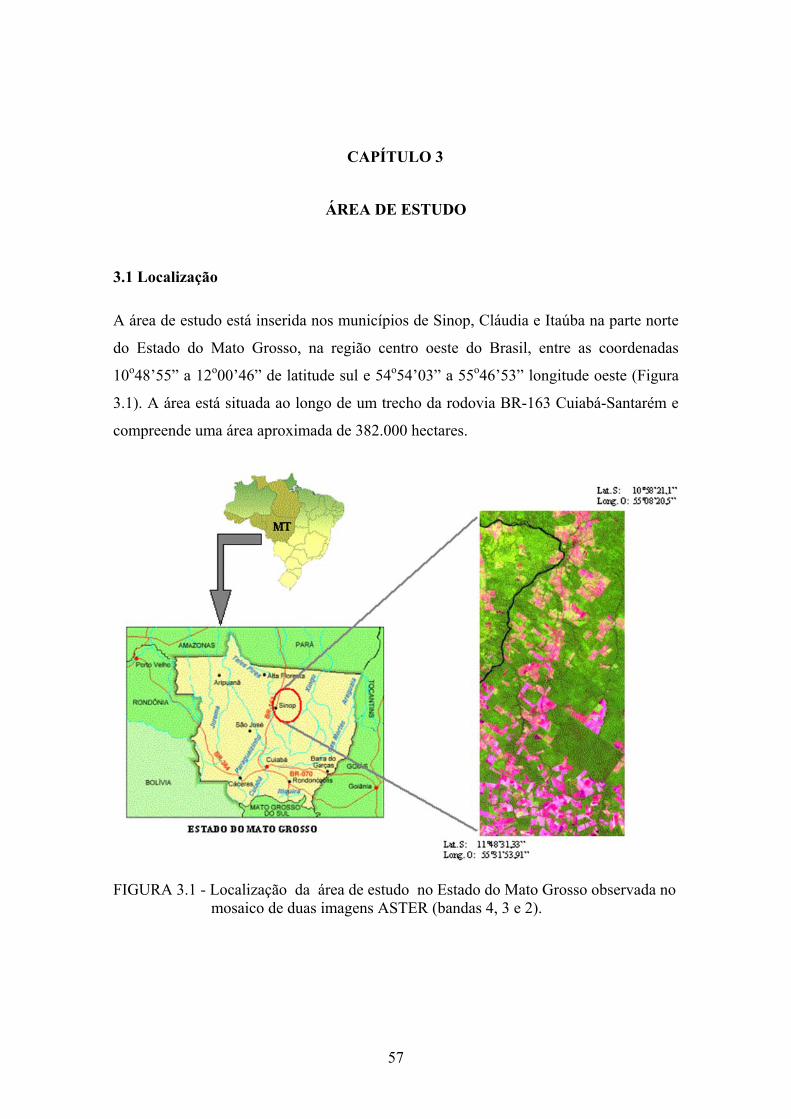
57
CAPÍTULO 3
ÁREA DE ESTUDO
3.1 Localização
A área de estudo está inserida nos municípios de Sinop, Cláudia e Itaúba na parte norte
do Estado do Mato Grosso, na região centro oeste do Brasil, entre as coordenadas
10o48’55” a 12o00’46” de latitude sul e 54o54’03” a 55o46’53” longitude oeste (Figura
3.1). A área está situada ao longo de um trecho da rodovia BR-163 Cuiabá-Santarém e
compreende uma área aproximada de 382.000 hectares.
FIGURA 3.1 - Localização da área de estudo no Estado do Mato Grosso observada no mosaico de duas imagens ASTER (bandas 4, 3 e 2).

58
3.2 Características Fisiográficas
3.2.1 Vegetação
Segundo o projeto RADAMBRASIL (1980), nesta região há ocorrência de floresta de
transição (zona de contato entre Floresta Ombrófila Aberta Submontana e Floresta
Estacional Semidecidual Submontana). Nestas áreas o período sem chuva é de
aproximadamente 4 a 5 meses, com mais de 20% das espécies florestais apresentando
caducifólia.
A Floresta Ombrófila Aberta – Formação Submontana é caracterizada por grandes
árvores, cujos espaços abertos são ocupados por palmeiras, cipós e bambu. Destaca-se
algumas espécies arbóreas como amarelão (Apuleia molaris), tatajuba (Bagassa
guianensis) e castanheira (Bertholletia excelsa). A Floresta Estacional Semidecidual é
constituída de árvores altas, grossas e de troncos retilíneos, ocorrendo a perda parcial de
suas folhas durante a estação seca. As espécies florestais predominantes são: cumaru
(Coumarouma sp.), peroba (Aspidosperma sp.), quaruba (Vochysia sp.) e cupiúba
(Goupia sp.).
Existem pequenas áreas de Floresta Ombrófila Densa Tropical - Formação Submontana
que ocupam os terrenos pediplanados ou dissecados, capeados de solos profundos
cobertos de árvores de dossel emergente. Apresenta uma submata de poucas plantas
arbustivas, algumas ervas, palmeiras e lianas leitosas. Suas principais características são
as árvores de médio a alto portes, como por exemplo: breu-manga (Tetragastris
altíssima), castanheira (Bertholletia excelsa), maçaranduba (Manilkara huberi) e
copiúba (Goupia glabra).
3.2.2 Clima
Segundo o sistema de classificação de Köppen, a área de estudo está sob domínio
climático tipo Am: Tropical chuvoso, com um período de seca (entre maio e setembro)
e chuvas inferiores a 60 mm no mês mais seco. A região caracteriza-se por ser uma zona
de transição entre a vegetação de cerrado e a amazônica, com um clima quente e úmido,

59
cujo regime térmico apresenta-se pela predominância de temperaturas elevadas, com
máximas em torno de 34°C, e uma temperatura média anual de 24°C. A precipitação
pluviométrica média oscila de 2.500 a 2.750 mm (Projeto RADAMBRASIL, 1980).
3.2.3 Solos
O tipo de solo predominante é o Latossolo Vermelho-Amarelo distrófico, categorizado
como não hidromórfico, com coloração menos avermelhada e com menores teores de
óxido de ferro. Em geral predominam as classes texturais franco-arenoso e franco-
argilo-arenoso. São solos pouco susceptíveis à erosão, ocorrendo em áreas com relevo
praticamente plano a ondulado (EMBRAPA, 1999).
3.2.4 Geomorfologia e Geologia
A região de estudo está localizada na unidade geomorfológica dos Planaltos dos Parecis,
identificado pelas formas tabulares com relevo de topo aplainado, com drenagens
profundas, separadas por vales de fundo plano. O padrão geral de drenagem é
subdendrítico. Sua geologia é originada da formação Araguaia, com depósito de
planície de inundação, com predomínio de seixos de arenitos finos a grosseiros (Projeto
RADAMBRASIL, 1980).
3.3 Uso Atual da Terra
Esta área caracteriza-se por ser uma região de fronteira agrícola e pólo madeireiro, além
de fazer parte do arco de desflorestamento amazônico, onde existem diversos processos
e agentes (colonos, pecuaristas e madeireiros) que atuam gerando uma grande pressão
na ocupação da área de floresta primária.
As principais culturas agrícolas da região são, milho, soja, algodão, arroz, e sorgo. A
Tabela 3.1 apresenta os dados de algumas das principais culturas encontradas nos
municípios que englobam a área de estudo, na safra de 2001.

60
TABELA 3.1 – Área municipal e área plantada por município (Km2) em 2001.
Área plantada Município
Área territorial Algodão Arroz Milho Soja Sorgo
Cláudia 3904,5 0 40,27 10,7 29,9 0Itaúba 6465,8 0 30 8 35 1,5Sinop 3194,3 35 250 70 200 5
FONTE: adaptada de IBGE (2003).
Na Tabela 3.2 são apresentados os meses indicados para o plantio de algumas culturas
existentes na área, que pode servir de subsidio para a análise dos comportamentos
espectrais e texturais realizado no tratamento das imagens ASTER na data selecionada.

61
TABELA 3.2 – Calendário agrícola para o Estado de Mato Grosso.
Produto Agrícola
Fase Jan Fev Mar Abr Mai Jun Jul Ago Set Out Nov Dez
Preparo do solo X X X Plantio/adubação X X X X X X Colheita X X X X
Algodão
Comercialização X X X X X Preparo do solo X X X X X Plantio/adubação X X X X Colheita X X X X Arroz
Comercialização X X X X Preparo do solo X X X X X Plantio/adubação X X X X Colheita X X X Milho
Comercialização X X X Preparo do solo X X Plantio/adubação X X X X Colheita X X
Milho (safrinha)
Comercialização X X Preparo do solo X X X X Plantio/controle X X X X X X X X Colheita X X X X X Soja
Comercialização X X X X X Preparo do solo X X Plantio/adubação X X X X X X Colheita X X Sorgo
Comercialização X X Preparo do solo X X Plantio/adubação X X X X Colheita X X
Sorgo (safrinha)
Comercialização X X
FONTE: adaptada de EMPAER-MT (2003).
Na Figura 3.2 pode-se observar que o desenvolvimento da atividade agrícola nos três
municípios de Cláudia, Itaúba e Sinop para o período entre 1997 e 2001. Onde a área
plantada de arroz teve um grande aumento a partir do ano de 1999, e a cultura da soja
tem um grande incremento a partir do ano de 2001. Por esse motivo, este aumento da
atividade agrícola na região é uma das causas no avanço do processo de aberturas de
novas terras.

62
0
5000
10000
15000
20000
25000
30000
35000
40000
1997 1998 1999 2000 2001
ANOS
ÁR
EA P
LAN
TAD
A T
OTA
L (h
as)
Algodão
Arroz
Milho
Soja
Sorgo
FIGURA 3.2 – Área total plantada (em hectares) para os municípios de Cláudia, Itaúba e Sinop, período de 1997-2001. FONTE: adaptada de IBGE (2003).
Enquanto as atividades de exploração madeireira para o mesmo período de 1997 a 2001,
a quantidade produzida de madeira em tora esta em decrescimento como pode ser
observado na Figura 3.3, a razão principal é que as áreas florestais com presença de
madeiras de alto valor comercial estão diminuindo ou muitas destas áreas já exploradas
passaram a ser áreas de pastagens ou de agricultura.

63
0
50000
100000
150000
200000
250000
300000
350000
1997 1998 1999 2000 2001
ANOS
QU
AN
TID
AD
E PR
OD
UZI
DA
TO
TAL
(m3) Lenha
Madeira tora
FIGURA 3.3 – Quantidade produzida (em metros cúbicos), de lenha e madeira em tora para os municípios de Cláudia, Itaúba e Sinop, período de 1997-2001. FONTE: adaptada de IBGE (2003).
Portanto, como resultado do avanço deste complexo de atividades humanas sobre a
floresta amazônica está surgindo um mosaico de pastagens, culturas, solo exposto e
áreas de vegetação secundária em diversos estádios de sucessão. Porém estes impactos
da intervenção antrópica sobre áreas de alta biodiversidade levam à eliminação imediata
do habitat natural, perda das condições edáficas e fragmentação da floresta nativa.

64

65
CAPÍTULO 4
MATERIAIS E MÉTODO
4.1 Materiais
4.1.1 Dados orbitais
Para a realização deste trabalho foram utilizados dados espectrais obtidos pelo sensor
ASTER, conforme consta na Tabela 4.1, adquiridas junto a NASA (National
Aeronautics and Space Administration) e a Earth Resources Observation Systems
(EROS) Data Center nos Estados Unidos para as imagens do ano 2002 e da Earth
Remote Sensing Data Analysis Center (ERSDAC) no Japão para as imagens de 2003.
Todas imagens foram do tipo 1B que são fornecidos aos usuários com calibrações
radiométrica e geométrica. As imagens de 2002 foram utilizadas de forma
complementar com a finalidade de investigar a dinâmica de uso e cobertura da terra na
área de estudo.
TABELA 4.1 - Dados das imagens ASTER selecionadas.
DATA ID IMAGEM BANDAS CENTRO DA
CENA
ÂNGULO
ELEVAÇÃO SOLAR
21/04/2002 pg-PR1B0000-
2002050402_019_001
1 – 9 11°40’55”S,
55°23’59”W
56,37°
21/04/2002 pg-PR1B0000-
2002050402_181_001
1 – 9 11°08’49”S,
55°16’51”W
56,91o
27/06/2003 pg-PR1B0000-
2003090902_005_001
1 – 9 11°40’50”S,
55°24’27”W
46,79o
27/06/2003 pg-PR1B0000-
2003090902_167_001
1 – 9 11°08’45”S,
55°17’22”W
47,39o

66
4.1.2 Dados cartográficos
Como informações complementares foram utilizadas cartas topográficas do DSG, escala
1:250.000, de referências SC 21-Z-A, SC 21-Z-B, SC 21-Z-C e SC 21-Z-D, que cobrem
a área de estudo.
4.1.3 Softwares utilizados
No ambiente computacional para o tratamento dos dados ASTER foram empregados os
softwares ENVI 3.6, ERDAS 8.5 e SGRNA 1.2.
4.2 Metodologia
Neste item é descrito o procedimento adotado para o desenvolvimento da pesquisa,
dividido em quatro fases. A primeira consiste na seleção da área de trabalho e aquisição
das imagens ASTER. A segunda fase, de pré-processamento relacionada a aplicações de
métodos de correção atmosférica, reamostragem das bandas do SWIR, de resolução
espacial de 30 metros para 15 metros, e o processo de registro e georeferenciamento das
imagens ASTER. A terceira fase, de classificação automática das imagens relacionada
com a aplicação de um algoritmo de classificação de RNA de tipo não supervisionada, e
realizando-se posteriormente uma pós-classificação para minimizar a presença de pixels
isolados. Finalmente, a quarta fase, de avaliação da exatidão e geração dos mapas de
uso e cobertura da terra para ambas datas das imagens ASTER.
Na Figura 4.1 apresenta-se um fluxograma da metodologia empregada.

67
FIGURA 4.1 - Fluxograma das atividades de pesquisa.
4.2.1 Técnicas de Pré-processamento
O pré-processamento das imagens ASTER neste trabalho envolve a redução do efeito da
atmosfera e correção geométrica, sendo descritos a seguir.
4.2.1.1 Correção das bandas SWIR
As bandas SWIR do sensor ASTER têm um problema de espalhamento da luz incidente
através dos detetores da banda 4 que afeta as bandas 5 e 9 principalmente, este problema
eletrônico é denominado de “cross-talk”. A correção foi realizada utilizando um
programa de correção elaborada por a ERSDAC (2001).
4.2.1.2 Compatibilização das resoluções espaciais das bandas VNIR e SWIR
A compatibilização das resoluções espaciais entre as bandas VNIR (15 metros) e bandas
SWIR (30 metros) foi obtida pela duplicação das linhas e colunas das bandas do SWIR
utilizando um reamostragem de vizinho mais próximo mediante um algoritmo

68
implementado no programa ENVI. Desta forma, os pixels relativos às bandas SWIR (30
metros) adquirem uma dimensão de 15 metros compatível à resolução espacial das
bandas VNIR. As nove bandas serão integradas em uma única imagem como pode
observar-se na Figura 4.2.
FIGURA 4.2 - Compatibilização de resoluções espaciais entre imagens VNIR e SWIR da imagem ASTER.
FONTE: adaptada de Bloise et al. (2003).
4.2.1.3 Confecção do mosaico de imagens ASTER
Como a área de estudo abrange parte de duas imagens ASTER foi feito um mosaico
para concatená-las em uma única imagem e posteriormente foi realizado um corte desse
mosaico para selecionar a área de trabalho.

69
4.2.1.4 Correção geométrica
Este tipo de correção baseia-se em pontos de controle extraído das cartas topográficas e
visa corrigir as distorções geométricas provocadas pela rotação e curvatura da superfície
da Terra e pelo deslocamento e oscilações da plataforma. A correção é efetuada através
de transformações geométricas que relacionam o posicionamento dos pixels da imagem
com as coordenadas geográficas. Em geral o registro de imagens é feita pela indicação
do sistema de referência e de projeção, por exemplo, latitude/longitude e UTM,
respectivamente.
A correção geométrica foi realizada para possibilitar o registro entre as cartas
topográficas e as imagens de satélite. Os pontos de controle foram selecionados a partir
dos dados de campo tomados com GPS (num total de 15 pontos) e aplicando-se para o
ajuste um polinômio de 1o grau.
4.2.1.5 Correção atmosférica
Para este caso foi aplicado o programa ACORN (Atmospheric CORection Now),
desenvolvido pela ImSpec LLC, que permite a correção atmosférica dos dados
multiespectrais e hiperespectral medidos em uma faixa espectral de 400 a 2500 nm. O
programa ACORN avalia, modela e compensa em relação à atmosfera para converter
radiância espectral em reflectância da superfície.
4.2.1.6 Retificação radiométrica
Este procedimento foi utilizado com o objetivo de uniformizar os valores radiométricos
de alvos pseudo-invariantes presentes na imagem. Com isto, pretendeu-se eliminar as
diferenças causadas pelos fatores que afetam a aquisição das imagens. Foram obtidos
valores digitais desses alvos pseudo-invariantes (claros e escuros) nas duas datas das
imagens (2002 e 2003), e ajustados por uma regressão linear, aos valores digitais da
imagem referência corrigida, seja para os alvos claros ou escuros.
Então, foram selecionados visualmente alvos fixos claros e escuros na imagem de
referência 2003. Como sendo uma área totalmente rural foi difícil escolher os alvos

70
claros, pois não existiam construções de concreto ou telhados. Por essa razão, escolheu-
se áreas de solo exposto que tivessem reflectância muito alta em todas as bandas e
presentes em ambas datas. No caso dos alvos escuros estes corresponderam a corpos de
água. Após esta seleção houve 18 alvos selecionados, sendo nove claros e nove escuros.
Como esses alvos são irregulares e um pequeno erro no registro poderia influenciar nos
limites dos alvos de uma data em relação à outra, foi feito um retângulo de doze por
doze pixels no centro do alvo, a fim de garantir que o alvo pudesse ser
convenientemente amostrado. Desses alvos foram extraídos os valores digitais máximos
e mínimos para cada imagem: referência e não retificada. Adotou-se o critério de
utilizar os valores mínimos para representar os valores dos alvos escuros e os valores
máximos àqueles dos alvos claros.
A partir dos valores da imagem de referência e da imagem a ser retificada foram
ajustadas equações de regressão linear para cada data, sendo a variável x os valores
mínimos (alvos escuros) e máximos (alvos claros) da imagem a ser retificada e a
variável y os valores mínimos (alvos escuros) e máximos (alvos claros) da imagem de
referência.
Uma etapa adicional de avaliação da retificação radiométrica consistiu na verificação do
erro a partir dos resíduos. A avaliação do método de retificação foi realizada pela
análise dos resíduos (Olsson, 1993) entre os valores de reflectância estimados para 12
alvos supostamente invariantes nas duas datas das imagens, utilizando um ajuste de
regressão, expressado na equação 4.1:
ibibibe ,,, Υ−Υ= (4.1)
onde:
ibe , = resíduo entre os valores digitais encontrados e o estimado na banda b, no pixel i;
ib,Υ = valor digital encontrado na banda b, no pixel i da imagem de referência;

71
ib,Υ = valor digital estimado na banda b, no pixel i da imagem retificada.
4.2.2 Trabalho de campo
Com o objetivo de fazer o reconhecimento e caracterização da paisagem “in situ”, foi
realizada uma missão de campo visando entender as feições espectrais presentes nas
imagens com os padrões de cobertura e uso da terra.
O trabalho de campo foi realizado no período de 25/05 a 12/06 de 2003. Devido a
extensão da área de estudo e com a finalidade de observar as diferentes formas de
ocupação da terra, como os diversos cultivos agrícolas, as áreas sob exploração
madeireira, e as pastagens, foi previamente realizada com base na imagem 2002 uma
seleção de pontos amostrais que deveriam ser visitadas.
Todos os pontos escolhidos foram descritos em uma caderneta de campo e anotadas as
coordenadas geográficas obtidas através de um GPS. Foram percorridos
aproximadamente 5.000 Km de estradas, totalizando 342 pontos, representativos das
feições encontradas na área, os quais tiveram registro fotográfico. Posteriormente, as
coordenadas geográficas obtidas através do GPS foram transformadas em uma planilha
digital, a ser utilizado nas etapas de escritório.
Durante a campanha de campo, além da caracterização da paisagem onde houve o
reconhecimento das principais feições de uso e cobertura da terra, foi elaborado um
levantamento dos parâmetros dendrométricos somente das áreas florestais, sobretudo
aquelas sob influência de atividades de extração de madeira, com o objetivo de facilitar
a caracterização dessas áreas sob degradação ou regeneração. Razão pela qual foram
coletados parâmetros como altura total, diâmetro à altura do peito (DAP), a
circunferência à altura do peito (CAP) e realizada a identificação botânica das espécies
encontradas em transectos de 10m x 250m, além de observações e medidas de clareiras
e trilhas de arraste.
Em relação aos dados do ano 2002, estes foram tomados do trabalho de campo de Silva
(2002) realizado no mês de julho onde foram levantados 130 pontos de observação.

72
4.2.3 Classificação por rede neural ART2
Neste tópico para a classificação das imagens ASTER foi utilizado o programa SGRNA
(Síntese Genética de Redes Neurais Artificiais) desenvolvido por Silva (2003) com o
objetivo de gerar um conjunto de classes segundo as características espectrais das
imagens ASTER. O mesmo dá como opção três diferentes tipos de redes (ART2, Fuzzy
ART e SOM) e junto a estas um algoritmo genético que permite a otimização dos
resultados da rede neural, para cada tipo de problema. Para este trabalho elegeu-se a
utilização de uma otimização genética na rede neural ART2 por ser pouco utilizado
(devido a sua complexidade e difícil implementação) no mapeamento de uso e cobertura
da terra e avaliar sua aplicabilidade.
A Figura 4.3 apresenta a primeira tela do programa “Configuração dos parâmetros da
otimização genética”. Nesta interface configuram-se os parâmetros iniciais do algoritmo
genético (probabilidade de ocorrer “crossing-over” e mutação, tamanho de população, e
quantidade de gerações ou iterações), e os parâmetros referentes à rede (parâmetro de
vigilância e seqüência de treinamento).

73
FIGURA 4.2 - Escolha dos parâmetros do AG e da rede ART2.
Estes parâmetros iniciais fornecidos à rede (valores do limiar de vigilância e da
seqüência de treinamento) foram otimizados pelo AG.
O parâmetro de vigilância é o parâmetro mais crítico, pois controla a resolução do
processo de classificação. Este valor quando muito baixo (por exemplo, próximos de 0,5
ou menos) permite que padrões não muito semelhantes sejam agrupados criando poucas
classes. Ao contrário, se o parâmetro de vigilância receber valor muito alto (por
exemplo, próximos ao valor de 1), pequenas variações nos padrões de entrada levarão a
criação de novas classes (Nepomuceno, 2003).
A seqüência de treinamento representa a quantidade máxima de diferentes conjuntos de
amostras tomadas aleatoriamente pela própria rede a fim de iniciar o processo de
autotreinamento. Os modelos das redes ART foram originalmente criados para uma
aprendizagem constante e em tempo real e/ou para uma aprendizagem rápida, cujo
tamanho (quantidade de amostras) é informado na opção Treinamento.

74
Segundo Nepomuceno (2003), estes parâmetros iniciais sofrem um processo de
evolução através dos processos iterativos onde cada iteração é chamada de geração.
Durante cada geração, princípios de seleção e reprodução são aplicados a uma
população de amostras através dos operadores genéticos (“crossing-over” e mutação).
A partir desta população os melhores indivíduos serão utilizados em um novo processo
de seleção para gerar outra população, que ao final de um número de gerações espera-se
que o processo leve à soluções ótimas ou quase ótimas.
Na Figura 4.4 apresenta-se a segunda tela do programa a qual permite ao usuário
escolher a quantidade de amostras de teste e de treinamento entre as imagens que
servirão de entrada para a rede gerar uma imagem classificada.
FIGURA 4.4 - Parâmetros de treinamento e teste para a rede e imagem de entrada.
O parâmetro treinamento diz respeito ao conjunto de amostras (quantidade de pixels),
tomadas aleatoriamente para que a rede se auto-organize. A quantidade de amostras é
estabelecida pelo usuário (para este caso foi de 1500, com o fim de obter o maior
conjunto de amostras possível), e será utilizado no algoritmo de treinamento e na
verificação de convergência da rede neural ART2.

75
O parâmetro teste também é um conjunto de amostras (quantidade de pixels) tomadas
aleatoriamente com o objetivo de verificar o nível de generalização dos agrupamentos
encontrados pelo algoritmo de treinamento. O algoritmo genético no momento da
geração interina tenderá a dar maior probabilidade de reprodução para o indivíduo que
gerar um grupo de padrões que melhor represente o conjunto de treinamento
(Nepomuceno, 2003). Deve-se ter em consideração que quanto maior o valor do
conjunto de treinamento e teste maior é o custo computacional.
Depois de escolhidos os parâmetros iniciais da rede e a quantidade de iterações (para
este caso definido automaticamente para um valor de 50), o tamanho da população
(escolheu-se o valor de 300) e os conjuntos de treinamento e teste gerados a partir das
imagens de entrada, o processo de classificação é iniciado.
Na Tabela 4.2 apresentam-se os parâmetros que melhor se ajustaram para as diferentes
combinações de bandas utilizadas para a imagem de 2003. Os parâmetros livres da rede
foram escolhidos de acordo com a quantidade de padrões existentes nas imagens e
possíveis de serem separados a priori através da interpretação visual, e também pela
quantidade de classes definidas no trabalho de campo.
TABELA 4.2 – Parâmetros iniciais do AG e da rede ART2 para a classificação das dife- rentes combinações de bandas das imagens ASTER.
Configuração dos parâmetros da Otimização genética Dados de treinamento Probabilidades Complexidade algorítmica Treinamento 1500 Crossover 0.6 População 300 Teste 1500 Mutação 0.002 Qde. Max. gerações 50 Parâmetros de ART2 Qde. Bits v. mínimo v. máximo Precisão Vigilância 12 0.5780 0.9875 0.0001 Seqüência de treinamento 8 0 255 1
A Figura 4.5 é a terceira tela do programa, onde se pode conferir todos os parâmetros do
AG e da rede ART2 informados nas telas anteriores e também dar início ao processo de
otimização.

76
FIGURA 4.5 - Início do processo de otimização.
A Figura 4.6 é a quarta tela do programa e mostra o final do processo de otimização,
onde os quadrados vermelhos representam a população inicial de parâmetros e os
triângulos azuis à população final ou otimizada (parte superior da Figura 4.6),
mostrando que os dados convergiram após o processo de seleção em doze gerações. A
partir deste ponto a rede inicia o processo de classificação das imagens escolhendo-se
qualquer indivíduo desta população otimizada, ou seja, qualquer triângulo azul.

77
FIGURA 4.6 - Final da otimização com os melhores indivíduos desta população.
A Figura 4.7 é a quinta tela do programa e apresenta o processo de classificação
concluído pela rede ART2, como exemplo para o caso das combinações de bandas
[B2,B3,B4], mostrando a quantidade de classes encontradas pela rede, e os parâmetros
do classificador. Neste exemplo verifica-se que a classificação da imagem foi realizada
utilizando o indivíduo de número 150 de uma população de 300 indivíduos depois de
passarem por um processo de seleção de doze gerações (onde qualquer um deles leva a
resultados ótimos e muito próximos entre si). O parâmetro de vigilância otimizado foi
de 0.9873 (ou seja, o nível de semelhança entre pixels pertencentes ao mesmo padrão
está acima deste valor), a seqüência de treinamento otimizada e utilizada foi a número
177 (ou seja, a seqüência da escolha aleatória dos 1500 pixels entre as 255 possíveis foi
a de nº 177 que apresentou um melhor desempenho para esta imagem) e a classificação
resultou numa imagem com 12 padrões ou classes.
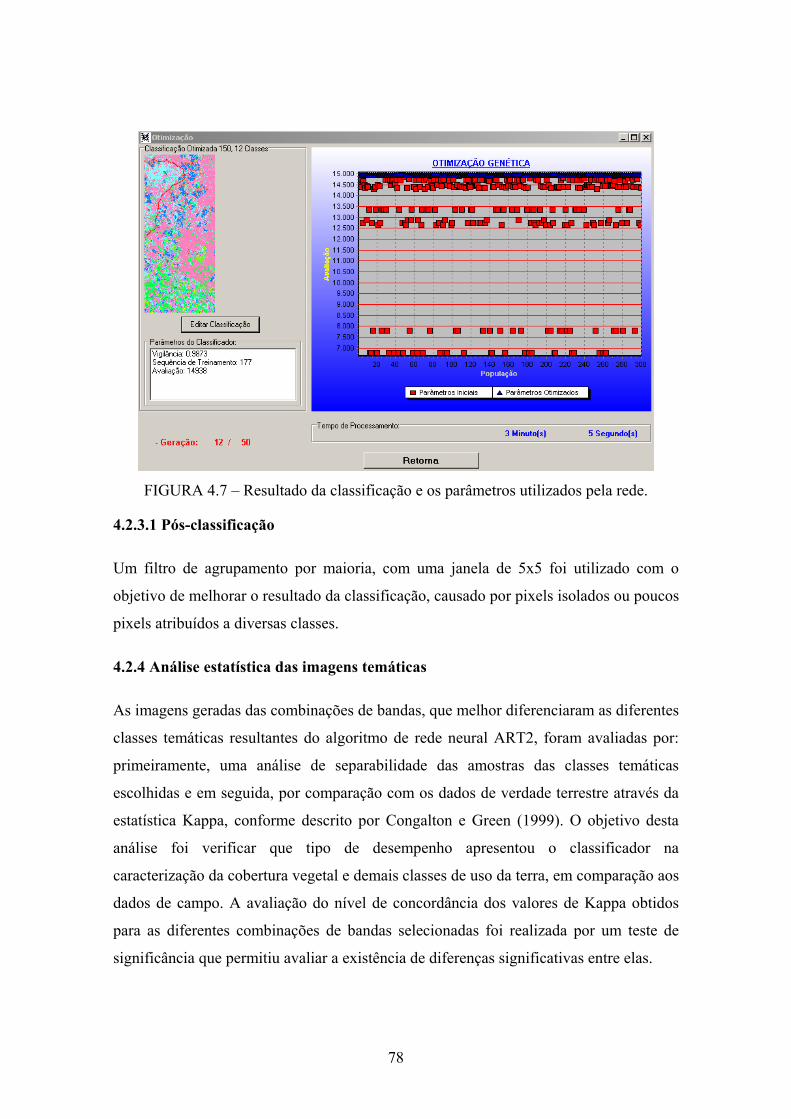
78
FIGURA 4.7 – Resultado da classificação e os parâmetros utilizados pela rede.
4.2.3.1 Pós-classificação
Um filtro de agrupamento por maioria, com uma janela de 5x5 foi utilizado com o
objetivo de melhorar o resultado da classificação, causado por pixels isolados ou poucos
pixels atribuídos a diversas classes.
4.2.4 Análise estatística das imagens temáticas
As imagens geradas das combinações de bandas, que melhor diferenciaram as diferentes
classes temáticas resultantes do algoritmo de rede neural ART2, foram avaliadas por:
primeiramente, uma análise de separabilidade das amostras das classes temáticas
escolhidas e em seguida, por comparação com os dados de verdade terrestre através da
estatística Kappa, conforme descrito por Congalton e Green (1999). O objetivo desta
análise foi verificar que tipo de desempenho apresentou o classificador na
caracterização da cobertura vegetal e demais classes de uso da terra, em comparação aos
dados de campo. A avaliação do nível de concordância dos valores de Kappa obtidos
para as diferentes combinações de bandas selecionadas foi realizada por um teste de
significância que permitiu avaliar a existência de diferenças significativas entre elas.

79
CAPÍTULO 5
RESULTADOS E DISCUSSÃO
Neste capítulo estão descritos os resultados obtidos com a aplicação da metodologia
utilizada pelo tratamento dos dados das imagens ASTER. Inicialmente serão
apresentados os resultados do trabalho de campo, com a caracterização da cobertura e
uso da terra presentes na área de estudo. Em seguida, os resultados quantitativos e
qualitativos obtidos a partir da aplicação das técnicas de pré-processamento (correção
geométrica, atmosférica e de retificação radiométrica), da técnica de classificação por
rede neural ART2, além de uma técnica de pós-classificação, com a redefinição de
classes temáticas e agrupamento de pixels isolados.
5.1 Caracterização das Áreas de Cobertura Vegetal e Uso da Terra
A caracterização dos tipos de uso e cobertura da terra foi elaborada através da fase de
trabalho de campo, contando previamente com o auxilio da imagem ASTER do ano
2002. As seguintes classes temáticas foram definidas:
Cultura agrícola: esta classe está representada na região de estudo por áreas de formato
geométrico de cultivos agrícolas de ciclo curto, como a soja (Glycine max), milho (Zea
mays), algodão (Gossypium hirsutum), milheto (Pennisetum glaucum), arroz (Oriza
sativa) e sorgo (Sorghum spp). Baseado nas informações de campo, observou-se que as
respostas espectrais e texturais das áreas cultivadas apresentam variações segundo o tipo
do estádio de desenvolvimento da cultura. Como por exemplo, no caso do milho que
existem duas variedades: milho verde (destinado para consumo humano) e milho seco
(destinado para ração animal). Em outros casos há alguma similaridade de resposta
espectral, como observado no exemplo das áreas de milho seco e solo exposto com
restos de culturas ou palhada, além do milho verde com o milheto.
Pasto limpo: esta classe é representada pelas grandes extensões de terra, em formatos
regulares, com maior influência do solo na resposta espectral que chega ao sensor,

80
quando a cobertura graminoide não está em um estágio de desenvolvimento
significativo. As áreas de pastagens locais estão caracterizadas pela dominância de
espécies normalmente utilizadas para a formação de pastagens (por exemplo,
Brachiaria humidicola, Brachiaria decumbens e Panicum maximum).
Pasto sujo: da mesma forma que a classe anterior, nesta categoria estão as grandes áreas
de formato geométrico, porém, com menor influência do solo na resposta que chega ao
sensor, devido ao desenvolvimento de plantas invasoras. Normalmente esta invasão
ocorre por palmeiras, como o babaçu (Orbignia martiana) e em maior número por
espécies pioneiras do processo regenerativo, de porte arbustivo, proporcionando a
cobertura parcial do terreno, como o espinheiro preto (Acacia polyphylla) e o lacre-
vermelho (Vismia latifolia).
Floresta primária/Floresta explorada antiga: esta formação compreende as formações
florestais que ainda não foram submetidas à exploração madeireira (não é percebido
alteração na estrutura do dossel florestal) ou aquelas que sofreram intervenção antrópica
pela atividade madeireira no passado (> 10 anos). Esta classe temática tem como
característica o total recobrimento do solo pela vegetação de porte florestal constituída
por vários estratos. Possui uma diversificada composição florístico-estrutural, dossel
heterogêneo e caracteriza-se pela presença de árvores com diâmetro à altura do peito
(DAP) médio de 25 cm, altura média de 16 m, com presença de árvores emergentes
alcançando até 35 m. Por meio da amostragem realizada em trabalho de campo esta
classe apresentou uma densidade média de 582 indivíduos/ha com DAP ≥ 10 cm. A
partir do inventário florestal as espécies identificadas com maior freqüência foram:
amescla (Protium heptaphyllum), canela (Ocotea sp.), leitero (Brosimum sp.), roxinho
(Platonia sp.), cambará (Vochysia sp.) e marmelo (Erythroxylum sp.).
Floresta explorada recente: formação caracterizada por áreas com cicatrizes recentes de
extração seletiva de madeira, cuja atividade exploratória vem ocorrendo em áreas de
floresta primária ou mesmo, de explorada antiga. Caracteriza-se pela presença de pátios
de estocagem de madeira (esplanadas) e pelos traçados dos ramais de acesso (como
trilhas de arraste) à exploração, onde podem observar-se os impactos no dossel nas áreas

81
de influência do processo de extração madeireira. A presença de pátios de estocagem de
forma alinhada indica que a floresta tem exploração mediante utilização de técnicas de
manejo florestal. Quando o padrão espacial destas esplanadas apresenta-se desordenado,
a exploração demonstra ser realizada sem nenhum planejamento florestal. Em
“transectos” inventariados, a identificação das espécies através dos “tocos” existentes
mostra que dentre as espécies comerciáveis e já retiradas preferencialmente estão:
cambará (Vochysia sp.), amescla (Protium heptaphyllum), itaúba (Mezilauris itaúba),
cedrinho (Erisma sp.), dentre outras.
Floresta degradada: formação caracterizada pelas áreas de floresta com maior presença
de resíduos florestais no solo e que foram intensamente exploradas, sem respeito às
normas de manejo florestal sustentável. Esta classe apresenta um dossel descontínuo,
sem definição no padrão estrutural típico de uma floresta, apresentando aspectos
intercalados de pequenos maciços florestais, aberturas de muitas clareiras, com estrato
inferior formado por uma regeneração em estádio inicial, onde se sobressaem espécies
pioneiras, entremeado com as trilhas de arraste. Nestas áreas é freqüente a presença de
rastros de fogo devido a incêndios florestais.
Floresta secundária: esta formação chamada também de capoeira é a denominação
dada ao tipo de vegetação em processo de regeneração que se desenvolve em áreas cuja
cobertura original foi removida. Estas intervenções ocorrem na floresta natural
basicamente no decorrer dos processos de colonização, para atividades de agricultura e
pecuária e cujas áreas estão atualmente recobertas majoritariamente por espécies
pioneiras num processo regenerativo considerado intermediário. As espécies
predominantes são: embaúba (Cecropia sp.), goiaba de porco (Bellucia sp.), envira preta
(Rollinia sp.) e lacre-vermelho (Vismia latifolia), dentre outros.
Floresta secundária com Bambu: compreende as áreas intensamente exploradas com
degradação da cobertura florestal. Esta área encontra-se em processo de regeneração
com grande ocorrência de bambus (Bambusa vulgaris, Guadua sp), ocupando as áreas
de clareiras geradas durante o processo de extração madeireira. Esta classe foi
observada nas imagens, sobretudo na porção superior esquerdo, por uma tonalidade

82
verde clara (combinação de bandas R4G3B2) que caracteriza a grande presença de
bambus nesta parte da área de estudo.
Solo exposto: compreende áreas sem nenhuma cobertura vegetal, com plena exposição
do solo, muitas vezes preparado para a atividade agrícola.
Solo com palha: corresponde a área sem cobertura vegetal, mas com a presença de
restos de culturas agrícolas e ainda a ocorrência de restos de culturas empilhados.
Água: abrange todos os corpos d’água presentes na imagem, em especial o rio Teles
Pires.
A Tabela 5.1 apresenta as feições de interesse na imagem ASTER do ano 2003 e sua
respectiva descrição.
TABELA 5.1 – Chave de interpretação da imagem ASTER ano 2003, composição R4G3B2.
CLASSE DESCRIÇÃO IMAGEM ASTER FOTO DE CAMPO Cultura Textura lisa, forma
poligonal.
Pasto limpo Textura lisa, forma
retangular.
Pasto sujo Textura pouco lisa,
forma irregular.
(continua)

83
Floresta primária
Textura muito rugosa, forma irregular.
Floresta explorada recente
Textura rugosa, forma irregular com pequenas áreas retangulares (pátios) distribuídos uniformemente.
Floresta degradada
Textura muito rugosa, forma
irregular.
Floresta secundária (Capoeira)
Textura média, forma irregular.
Floresta secundária com Bambu
Textura média, forma irregular.
Solo exposto Textura lisa, forma
poligonal.
TABELA 5.1 – (continuação)
(continua)

84
Solo com palha
Textura pouco lisa, forma poligonal.
Água Textura lisa, forma
alongada.
Na Figura 5.1, apresenta-se a localização dos pontos de inventários e os pontos de
observação visitados em campo, nos meses de maio e junho de 2003.
TABELA 5.1 – (conclusão)

85
FIGURA 5.1 – Localização dos pontos de observação e de inventário em maio e junho de 2003.
Os pontos coletados em campo foram úteis ao reconhecimento geral da área, sendo
utilizados na seleção das classes a serem observadas tanto no tipo e evolução do uso,
como para a comparação espectral entre os alvos em estudo.

86
Na Tabela 5.2 é apresentada uma descrição dos dados dos transectos inventariados (10
metros x 250 metros), incluindo o número de espécies, altura máxima, DAP máximo e
número de indivíduos.
TABELA 5.2 – Estatística dos transectos inventariados.
N S DAP DAP Altura Altura TRANSECTO (n° ind) (n° sp) média (cm) máx. (cm) média (m) máx. (m)
T1 (Floresta explorada em 2001 – bastante degradada) 105 21 22,10 63,00 16,34 30T2 (Floresta explorada) 138 26 24,62 89,00 14,31 30T3 (Floresta explorada) 109 28 28,49 137,00 18,35 35T4 (Floresta explorada antiga) 129 30 20,08 97,40 12,41 34T5 (Floresta degradada com rastro de fogo) 27 15 27,08 60,16 18,91 38T6 (Floresta explorada em 2001) 113 29 24,64 109,18 16,55 38T7 (Floresta primária) 107 35 30,14 102,81 17,33 35T8 (Floresta primária) 116 32 21,83 53,16 16,45 28T9 (Floresta explorada antiga - degradada com capoeira alta) 89 27 22,03 70,03 17,21 35T10 (Floresta explorada antiga) 121 31 23,59 60,80 17,51 30T11 (Floresta explorada recente em 2002) 90 29 23,04 109,00 11,17 28
Analisando os dados em relação à estrutura do dossel, observou-se que os “transectos”
localizados em áreas de floresta primária e exploração antiga apresentavam a maior
diversidade de espécies, maior número de indivíduos e em alguns casos com valores de
DAP maiores, que mostra o melhor estado de conservação destas formações florestais
em relação à floresta degradada. Podemos citar como exemplo disto os transectos T4,
T6, T7 e T10.
5.2 Aplicação das Técnicas de Pré-Processamento
5.2.1 Fenômeno “cross-talk”
No processo de realce das bandas das imagens ASTER, encontrou-se com o problema
denominado “cross-talk”, que acontece com as bandas SWIR (bandas 4 a 9) conforme
indicado por Iwasaki et al. (2001). Este problema consiste na aparição de um efeito de
iluminação nas bordas das áreas de floresta e solo, pastagem ou água. Essa iluminação

87
considera-se que é gerado por causa da forte radiação incidente da banda 4, razão pela
qual este brilho afeta principalmente as bandas 9 e 5, por ser mais próximas à banda 4
no plano focal do SWIR, como pode ser observado na Figura 5.2. O problema é
resolvido com a aplicação de um programa de correção “cross-talk” desenvolvido pela
ERSDAC (2001). No programa de correção, o “cross-talk” na imagem é calculado por
duas distribuições gaussianas com amplitudes e desvios padrão em X (na direção do
“cross track”) e Y (na direção “along track”) como parâmetros. Maiores detalhes do
programa podem-se encontrar em ERSDAC (2001).
FIGURA 5.2 – Plano focal do ASTER/SWIR.
FONTE: adaptada de Iwasaki et al. (2001).
A Figura 5.3 ilustra, o problema, antes e após a correção em parte da imagem ASTER
(combinação de bandas R9G8B5), tendo como exemplo uma área contendo classes de
floresta, pastagens e solo, com um realce de “decorrelation stretch”, que é uma técnica
para realçar as variações de cor entre diferentes alvos dentro de uma cena.

88
FIGURA 5.3 – Imagem ASTER, bandas R9G8B5 com realce de “decorrelation stretch”, antes (A) e após (B) da aplicação do programa de correção “cross-talk”.
5.2.2 Correção geométrica
A correção geométrica das imagens ASTER consistiu no georeferenciamento a partir de
pontos de controle tomados em campo com o auxílio de um GPS e no registro imagem-
imagem para as duas datas de passagem referentes às datas de 2003 e 2002.
Foram identificados 20 pontos de controle que serviram para realizar a correção
geométrica, onde se utilizou um polinômio de primeiro grau e a reamostragem dos
pixels pelo algoritmo do vizinho mais próximo, obtendo-se um erro quadrático médio
para cada um dos pontos. Aqueles pontos que apresentavam um erro significativo foram
descartados, realizando-se novamente o registro e a reamostragem com os pontos
restantes. Tomando-se como referência a imagem de 2003, foi realizado o registro da
outra imagem de 2002 baseado em 6 pontos de controle.
Na avaliação da exatidão do registro da imagem referência de 2003, através do modelo
polinomial, obteve-se um erro médio quadrático de 0,27. Este resultado foi considerado
satisfatório, pois para uma resolução espacial de 15 metros das imagens ASTER, o erro
interno total para os pontos utilizados no mapeamento (4,05 metros) representa um

89
valor menor que meio pixel da resolução espacial das imagens. Para o caso da imagem
de 2002 o erro médio quadrático foi de 0,05 que foi considerado ótimo.
5.2.3 Correção atmosférica
A correção atmosférica foi realizada utilizando-se o programa ACORN 4.0, baseado no
modelo de transferência radiativa MODTRAN 4, que transformou valores de radiância
das imagens ASTER para valores de reflectância de superfície. Na Tabela 5.3
apresentam-se os dados utilizados para o modelo atmosférico tropical da correção
atmosférica.
TABELA 5.3 – Parâmetros para a correção atmosférica no programa ACORN 4.0.
PARÂMETROS IMAGEM MOSAICO
2002 IMAGEM MOSAICO
2003 Lat/Long centro imagem 11° 21' 16" / 55° 20' 13" 11° 21' 16" / 55° 20' 13"Altitude média terreno (m.s.n.m.) 350 350 Data aquisição imagem 21/abr 27/jun Horário da passagem 14:03:17 14:01:44 Altitude satélite (km) 705 705 Visibilidade atmosférica (km) 50 50 Vapor de água (mm) 25,18 31,82
Deve-se mencionar que os dados de vapor de água foram obtidos dos produtos do
sensor MODIS, localizado no mesmo satélite Terra correspondente as mesmas datas do
período de aquisição das imagens ASTER (MODIS, 2003).
O resultado da comparação da imagem 2003 antes e após da correção atmosférica é
representada na Figura 5.4 através da curva de reflectância da água. Pode-se observar
que ocorreu uma redução do fator de reflectância nas faixas espectrais do visível e em
menor medida, na região do infravermelho próximo, que são regiões justamente
afetadas pela absorção da atmosfera.

90
FIGURA 5.4 – Curva espectral da água antes e após a correção atmosférica.
5.2.4 Retificação radiométrica
Para a avaliação da qualidade da retificação realizou-se a comparação das médias de
reflectância dos alvos pseudo-invariantes claros e escuros, de cada data de passagem,
antes e depois da retificação, com as médias da imagem de referência. Na Tabela 5.4
estão listadas as médias de reflectância dos alvos pseudo-invariantes claros e escuros, da
imagem de referência de 2003, utilizada para a retificação da imagem de 2002.
TABELA 5.4 – Médias dos alvos claros e escuros em valores de reflectância da imagem de referência de 2003.
Bandas Claros - imagem
2003 Escuros - imagem
2003 1 0,150 0,058 2 0,176 0,033 3 0,282 0,068 4 0,331 0,045 5 0,206 0,032 6 0,214 0,026 7 0,200 0,025 8 0,192 0,023 9 0,205 0,048

91
A Tabela 5.5 mostra as médias de reflectância antes e depois da retificação, com suas
respectivas diferenças para as médias da imagem referência. Pode-se observar que em
todas as bandas houve uma diminuição na diferença das médias dos valores de
reflectância entre a imagem de referência e aquela que sofreu o processo de retificação.
TABELA 5.5 – Médias de reflectância dos alvos invariantes claros e escuros antes e após retificação.
Bandas Claros
imagem 2003 Claros
imagem 2002 DiferençaClaros - imagem 2002
retificada Diferença1 0,150 0,144 0,006 0,151 0,001 2 0,176 0,173 0,002 0,174 0,002 3 0,282 0,307 0,025 0,301 0,019 4 0,331 0,325 0,006 0,327 0,004 5 0,206 0,186 0,020 0,212 0,006 6 0,214 0,195 0,019 0,223 0,009 7 0,200 0,184 0,016 0,202 0,002 8 0,192 0,170 0,022 0,194 0,002 9 0,205 0,159 0,046 0,204 0,001
Bandas Escuros
imagem 2003 Escuros
imagem 2002 DiferençaEscuros - imagem 2002
retificada Diferença1 0,058 0,045 0,039 0,057 0,001 2 0,033 0,038 0,036 0,032 0,001 3 0,068 0,063 0,088 0,067 0,001 4 0,045 0,048 0,043 0,045 0,000 5 0,032 0,032 0,012 0,030 0,001 6 0,026 0,027 0,009 0,026 0,000 7 0,025 0,028 0,012 0,027 0,002 8 0,023 0,021 0,000 0,021 0,000 9 0,048 0,043 0,003 0,050 0,002
A continuação na Tabela 5.6 apresenta-se as equações de regressão linear e os
respectivos coeficientes de determinação (R2), utilizadas na retificação radiométrica das
duas imagens, onde X é o número digital dos alvos pseudo-invariantes da imagem antes
da retificação e Y é o número digital dos mesmos alvos após a retificação, considerando
12 alvos (seis escuros e seis claros).

92
TABELA 5.6 – Equações de regressão utilizadas na retificação radiométrica.
Banda Equação R2 1 Y = 0,954X + 0,0139 0,9792 2 Y = 1,049X - 0,0079 0,9619 3 Y = 0,9994X + 0,0046 0,9521 4 Y = 1,0902X - 0,0076 0,9737 5 Y = 1,1806X - 0,0075 0,9795 6 Y = 1,1768X - 0,0067 0,9656 7 Y = 1,123X - 0,0045 0,9696 8 Y = 1,1622X – 0,0039 0,9865 9 Y = 1,3301X – 0,0076 0,9896
5.3 Classificação das Imagens
5.3.1 Análise da resposta espectral das classes temáticas
Com o fim de avaliar a distinção entre as classes de uso e cobertura da terra, realizou-se
inicialmente uma análise do comportamento espectral dada pelos valores de reflectância
e os comprimentos de onda na faixa espectral de 500 – 2500 nm, que compreende as
nove bandas do sensor ASTER. Na Figura 5.5 apresenta-se o gráfico de reflectância
média das amostras típicas das classes temáticas definidas para a área de estudo,
correspondentes a data de passagem de 27/06/2003.

93
FIGURA 5.5 – Comportamento espectral para os alvos correspondentes às classes temá- ticas definidas para a área de estudo.
Pode-se observar na Figura 5.5 que em geral, as classes de Floresta primária, Floresta
explorada recente, Floresta degradada, Bambu, Capoeira, Pasto limpo e Pasto sujo
apresentam o comportamento espectral característico para a vegetação, ou seja, uma
baixa reflectância nas bandas 1 e 2, correspondente ao visível (VIS), alta reflectância na
banda 3 (infravermelho próximo - IVp) e novamente, uma baixa reflectância nas bandas
4 ao 9, corresponde ao infravermelho médio (SWIR) devido principalmente à presença
de água no interior das folhas. As classes pasto sujo e pasto limpo têm um ligeiro
aumento da reflectância no SWIR em relação ás classes de floresta, bambu e capoeira
devido ao menor conteúdo hídrico na massa foliar.
As classes referentes às culturas, como algodão, milheto, milho verde e milho seco, têm
um comportamento espectral variado dependendo de seu estado fenológico. O milheto e
milho verde tem um comportamento espectral muito similar, no entanto o milho seco

94
tem um comportamento quase similar em relação à classe solo com palha, causado por
seu estado fenológico final e a sua tonalidade parecida a essa classe. No caso da classe
água, o aumento de seu valor de reflectância, especialmente na faixa do IVp (bandas 3),
é causado por a presença de materiais em suspensão e menor profundidade da mesma
por encontrar-se na época de estiagem. A partir da figura anterior, pode-se observar que
a melhor separação entre os diferentes alvos encontrados em campo encontra-se na
banda 4 (1600 a 1700 nm), correspondente à faixa do infravermelho médio.
Por outro lado, existe um aumento da reflectância na banda 9, para todas as classes, que
não seria um comportamento típico dos alvos, pois deveria ter uma reflectância menor o
igual às outras bandas do SWIR. Este comportamento poderia devesse ao problema do
“cross-talk” ou que a correção atmosférica não foi bem sucedida para esta banda.
5.3.2 Separabilidade das classes
Como foi observado na análise espectral dos alvos em estudo, algumas classes temáticas
apresentam certa similaridade espectral, por isso avaliou-se a separabilidade do
conjunto de amostras das classes temáticas definidas no trabalho de campo. As classes
temáticas definidas na caracterização do uso e cobertura da terra na área de estudo
foram: pasto sujo (Ps), pasto limpo (Pl), solo exposto (Se), solo com palha (Sp), água
(A), culturas (C), floresta primária/floresta explorada antiga (Fp), floresta explorada
recente (Fe), floresta degradada (Fd), floresta secundária/capoeira (Ca) e finalmente
floresta secundária/bambu (B), este conjunto de amostras das classes é apresentado na
Tabela 5.7.

95
TABELA 5.7 – Conjunto de amostras das classes temáticas na imagem de 2003.
CLASSES TEMÁTICAS Números de amostra (em pixels) Água (A) 1974 Culturas ( C ) 6436 Pasto limpo (Pl) 3042 Pasto sujo (Ps) 5819 Solo exposto (Se) 3625 Solo com palha (Sp) 3451 Floresta primária (Fp) 2378 Floresta explorada recente (Fe) 3881 Floresta degradada (Fd) 2539 Capoeira (Ca) 2321 Bambu (B) 3020
Para isso utilizou-se a medida de Divergência Transformada que varia entre os valores 0
(separabilidade ruim entre duas classes) e 2 (separabilidade máxima entre duas classes).
Na Tabela 5.8 apresenta-se as medidas de separabilidade para estas 11 classes temáticas,
onde pode-se observar que os menores valores de separabilidade encontram-se entre as
classes de floresta primária com floresta explorada recente (valor de 0,51) e bambu com
capoeira (1,31). No caso do primeiro par de classes estas possuem valor menor que um,
que é considerado muito ruim. Por tanto, decidiu-se agrupá-las em Floresta
primária/Floresta explorada recente (Fp/Fe) e em Bambu/Capoeira (B/Ca). Assim,
obteve-se finalmente só 9 classes temáticas.
TABELA 5.8 – Medidas de separabilidade entre classes temáticas, método de Divergên- cia Transformada.
CLASSES A C Fp Fe Fd Ca B Ps Pl Se Sp Água (A) 0,00 2,00 2,00 2,00 2,00 2,00 2,00 2,00 2,00 2,00 2,00Culturas ( C ) 2,00 0,00 2,00 2,00 2,00 2,00 2,00 1,51 1,99 1,86 1,94F. primária (Fp) 2,00 2,00 0,00 0,51 1,97 1,88 1,96 2,00 2,00 2,00 2,00Floresta explorada recente (Fe) 2,00 2,00 0,51 0,00 1,85 1,64 1,91 2,00 1,99 2,00 2,00Floresta degradada (Fd) 2,00 2,00 1,97 1,85 0,00 1,84 1,99 2,00 2,00 2,00 2,00Capoeira (Ca) 2,00 2,00 1,88 1,64 1,84 0,00 1,31 2,00 1,99 2,00 2,00F. secundária com Bambu (B) 2,00 2,00 1,96 1,91 1,99 1,31 0,00 2,00 2,00 2,00 2,00Pasto sujo (Ps) 2,00 1,51 2,00 2,00 2,00 2,00 2,00 0,00 1,92 1,99 1,98Pasto limpo (Pl) 2,00 1,99 2,00 1,99 2,00 1,99 2,00 1,92 0,00 2,00 1,99Solo exposto (Se) 2,00 1,86 2,00 2,00 2,00 2,00 2,00 1,99 2,00 0,00 1,54Solo com palha (Sp) 2,00 1,94 2,00 2,00 2,00 2,00 2,00 1,98 1,99 1,54 0,00

96
A Tabela 5.9 mostra o resultado final da separabilidade das 9 classes temáticas
escolhidas finalmente, onde ainda existem classes que tem uma separabilidade regular
como pasto sujo com culturas e solo exposto com solo palha, isto devido à grande
similaridade espectral destas classes temáticas e que para esta época do ano (mês de
Junho) apresentam uma mistura na resposta espectral. Esta análise da separabilidade
entre classes pode indicar o limite da estratificação temática na classificação realizada
pela rede neural ART2.
TABELA 5.9 – Separabilidade para as nove classes temáticas finais.
CLASSES A C Fp/Fe Fd B/Ca Ps Pl Se Sp Água (A) 0,00 2,00 2,00 2,00 2,00 2,00 2,00 2,00 2,00Culturas ( C ) 2,00 0,00 2,00 2,00 2,00 1,51 1,99 1,86 1,94F. Primária/F. Explorada recente (Fp/Fe) 2,00 2,00 0,00 1,91 1,80 2,00 1,99 2,00 2,00Floresta degradada (Fd) 2,00 2,00 1,91 0,00 1,93 2,00 2,00 2,00 2,00F. secundária com Bambu/Capoeira (B/Ca) 2,00 2,00 1,80 1,93 0,00 2,00 1,99 2,00 2,00Pasto sujo (Ps) 2,00 1,51 2,00 2,00 2,00 0,00 1,92 1,99 1,98Pasto limpo (Pl) 2,00 1,99 1,99 2,00 1,99 1,92 0,00 2,00 1,99Solo exposto (Se) 2,00 1,86 2,00 2,00 2,00 1,99 2,00 0,00 1,54Solo com palha (Sp) 2,00 1,94 2,00 2,00 2,00 1,98 1,99 1,54 0,00
5.3.3 Classificador ART2
Inicialmente com o fim de gerar novas classificações utilizando como dados de entrada
da rede três ou mais bandas, adotamos o critério de apresentar à rede as bandas que
fossem menos correlacionadas entre si, ou seja, que possuíssem diferentes níveis de
informações a respeito dos alvos da cena. Com este propósito foi gerada uma matriz de
correlação apresentada na Tabela 5.10.
TABELA 5.10 – Matriz de correlação (imagem 2003)
Bandas B1 B2 B3 B4 B5 B6 B7 B8 B9 B1 1,0000 0,9730 -0,1140 0,9097 0,9068 0,9015 0,8980 0,8911 0,8861 B2 0,9730 1,0000 -0,2115 0,9287 0,9431 0,9404 0,9388 0,9426 0,9303 B3 -0,1140 -0,2115 1,0000 -0,0903 -0,2130 -0,2087 -0,2093 -0,2361 -0,2663B4 0,9097 0,9287 -0,0903 1,0000 0,9684 0,9738 0,9636 0,9513 0,9309 B5 0,9068 0,9431 -0,2130 0,9684 1,0000 0,9903 0,9874 0,9844 0,9728 B6 0,9015 0,9404 -0,2087 0,9738 0,9903 1,0000 0,9901 0,9857 0,9721 B7 0,8980 0,9388 -0,2093 0,9636 0,9874 0,9901 1,0000 0,9897 0,9738 B8 0,8911 0,9426 -0,2361 0,9513 0,9844 0,9857 0,9897 1,0000 0,9780 B9 0,8861 0,9303 -0,2663 0,9309 0,9728 0,9721 0,9738 0,9780 1,0000

97
Pode-se observar na Tabela 4.10, que somente a banda 3 é a única menos correlacionada
entre todas as bandas, e tomando como base esta banda foram selecionadas as seguintes
combinações de bandas como entradas da rede: [2,3,4], [2,3,4,5], [2,3,4,6], [2,3,4,7],
[2,3,4,8], [2,3,4,9], [1,2,3], [1,3,8], [3,4,6] e finalmente todas as bandas
[1,2,3,4,5,6,7,8,9].
Para dar início ao processo de classificação utilizando três bandas ou mais bandas como
entrada da rede, foram utilizados os parâmetros iniciais da rede para as combinações de
bandas classificadas, mostradas na Tabela 4.2. Além disso, a rede foi treinada para
reconhecer padrões nas imagens levando em consideração a quantidade de nove classes
temáticas definidas finalmente e apresentadas na Tabela 5.9.
Os resultados obtidos foram satisfatórios para o parâmetro de vigilância menor ou igual
a 0,9874, número de gerações maior que 7 e uma seqüência de treinamento maior a 91,
pois a quantidade de padrões identificados foram próximos ao número de nove classes
temáticas estabelecidas. Na maioria dos casos a maior quantidade de padrões
encontrados não contribuiu para separar e/ou diferenciar os padrões já existentes nas
imagens classificadas ou até mesmo mostrar novas classes temáticas. Na Tabela 5.11
apresentam-se os parâmetros de entrada da rede após serem otimizados pelo algoritmo
genético para cada combinação de bandas e seus respectivos processamentos para a
imagem de 2003.
TABELA 5.11 – Parâmetros resultantes do classificador da rede ART2 para as diferen- tes combinações de bandas na imagem de 2003.
Combinações Bandas
Parâmetro deVigilância
Seqüência deTreinamento
N° de Gerações
N° padrões
[2,3,4] 0,9872 204 14 12 [2,3,4,5] 0,9874 74 15 13 [2,3,4,6] 0,9868 235 12 15 [2,3,4,7] 0,9874 215 14 12 [2,3,4,8] 0,9866 176 12 12 [2,3,4,9] 0,9875 91 14 14 [1,2,3] 0,9800 75 18 11 [1,3,8] 0,9805 111 14 15 [3,4,6] 0,9852 138 7 10
[1,2,3,4,5,6,7,8,9] 0,9866 170 9 15

98
Relacionando os padrões reconhecidos na classificação não supervisionada ART2 e as
classes temáticas definidas, as combinações das bandas que tiveram melhores resultados
foram [2,3,4], [2,3,4,6], [2,3,4,7] e [2,3,4,8]. Com essas combinações foi possível
identificar toda as classes temáticas e, além disso, cada padrão correspondeu somente a
uma classe temática. Um caso contrário aconteceu, por exemplo, para a combinação
[2,3,4,5], onde um determinado padrão misturou as classes temáticas Floresta degradada
e Bambu/capoeira, outro misturou as classes temáticas Culturas e Solo exposto, e
finalmente outro padrão misturou as classes temáticas Pasto sujo e Solo exposto. Na
Tabela 5.12 mostra-se a relação padrão-classe temática para as combinações de bandas
[2,3,4], [2,3,4,6], [2,3,4,7] e [2,3,4,8].
TABELA 5.12 – Relação entre padrões identificados e as respectivas classes temáticas, imagem 2003.
Combinação de Bandas [2, 3, 4] [2, 3, 4, 6] [2, 3, 4, 7] [2, 3, 4, 8]Classes N° do Padrão
Água 7 14 6 6 Culturas 3 6 2 2, 10 F. Primária/F. explorada recente 9 5, 10 8 5 Floresta degradada 2, 12 0, 3, 7, 12 4, 9 9, 11 F. secundária com Bambu/Capoeira 6 11 3 7 Pasto sujo 0, 1 2 11 3, 4 Pasto limpo 8 1, 9 7 8 Solo exposto 4, 5, 11 4, 8 1, 5, 10 0, 1 Solo com palha 10 14 0 10
Para a análise dos dados da imagem 2002, realizou-se o mesmo procedimento realizado
para a imagem de 2003, e a Tabela 5.13 mostra os parâmetros de entrada da rede após
serem otimizados pelo algoritmo genético.

99
TABELA 5.13 - Parâmetros resultantes do classificador da rede ART2 para as diferen- tes combinações de bandas na imagem de 2002.
Combinações Parâmetro de Seqüência de N° de N° Bandas Vigilância Treinamento Gerações padrões [2,3,4] 0,9872 50 9 15
[2,3,4,5] 0,9874 255 12 17 [2,3,4,6] 0,9866 112 9 16 [2,3,4,7] 0,9872 168 10 17 [2,3,4,8] 0,9873 59 11 16 [2,3,4,9] 0,9875 48 11 20 [1,2,3] 0,9803 39 15 13 [1,3,8] 0,9803 66 12 17 [3,4,6] 0,9802 110 11 11
[1,2,3,4,5,6,7,8,9] 0,9844 44 13 18
Neste caso da imagem de 2002, em todos os resultados das classificações, somente em
duas combinações de bandas [2,3,4] e [2,3,4,8], todos os padrões classificados pela rede
neural ART2 reconheceram as classes temáticas estabelecidas previamente, onde
tiveram como característica especial em ambos casos que a classe culturas misturou-se
com algumas áreas de pasto limpo. Nas outras combinações de bandas, estas não
resultaram satisfatórias porque os padrões reconhecidos na classificação misturaram
várias classes com outras, como por exemplo, um determinado padrão misturou a classe
Floresta primária com a classe Floresta degradada e outro padrão misturou a classe água
com a classe solo com palha. A Tabela 5.14 apresenta a relação padrão-classe temática
para as imagens [2,3,4] e [2,3,4,8].
TABELA 5.14 - Relação entre padrões identificados e as respectivas classes temáticas, imagem 2002.
Combinação de Bandas [2,3,4] [2,3,4,8] Classes Temáticas N° do Padrão
Água 5, 11 0 Culturas/pasto 13 14 F. Primária/F. explorada recente 3, 8, 16 2, 7, 8 Floresta degradada/Capoeira 0, 6, 9, 12 1, 4 ,9 10 F. secundária com Bambu 7 11 Pasto sujo 13, 14 12, 14 Pasto limpo 1, 10, 13, 15 3, 13 ,14 Solo exposto 2, 4 5, 15 Solo com palha 17 6

100
Comparando os resultados para ambas datas nas Tabelas 4.11 e 4.13, em geral as
melhores classificações alcançaram um parâmetro de vigilância menor ou igual a 0,974,
e na seqüência de treinamento obtiveram-se um valores variados. Em quase todos os
casos o número de padrões identificados para o ano 2002 foi maior que o ano 2003.
5.3.4 Pós-classificação
Os mapas gerados pelos parâmetros do classificador ART2 resultaram em imagens com
a presença de pixels isolados que ocorrem próximos a áreas homogeneamente
classificadas, por tal motivo realizou-se uma homogeneização do resultado da
classificação. Para tal, aplicou-se um filtro mediano com uma janela de 5x5 para todas
as classes temáticas por conter estas classes uma quantidade quase similar de pixels
isolados. A comparação do resultado pode-se, como exemplo, observar na Figura 5.6
em um setor da imagem classificada do ano 2003. Realizou-se o mesmo processo de
homogeneização para as imagens de 2002.
FIGURA 5.6 – Homogeneização da imagem classificada do ano 2003, antes (A) e depois (B) aplicando um filtro mediana 5x5.
5.4 Avaliação da Exatidão na Classificação por Rede Neural ART2
A utilização da estatística Kappa permitiu que fossem geradas matrizes de erro que
possibilitaram a comparação entre as imagens classificadas pelo algoritmo de rede

101
neural ART2 e os dados de campo ou verdade terrestre. Baseado nestas matrizes de
erro, que serão apresentadas no Apêndice A, na Tabela 5.15 apresenta-se os diferentes
valores de exatidão global e de coeficiente Kappa resultantes destas classificações para
as combinações de bandas [2,3,4], [2,3,4,6], [2,3,4,7] e [2,3,4,8] da imagem do ano
2003.
TABELA 5.15 – Valores de Exatidão Global e coeficiente Kappa para as classificações geradas a partir da imagem 2003.
Combinação de bandas Exatidão global (%) Kappa [2,3,4] 68,726 0,6429 [2,3,4,6] 67,170 0,6249 [2,3,4,7] 64,047 0,5899 [2,3,4,8] 58,647 0,5280
Pode-se observar que nesta última tabela, o valor Kappa não difere muito entre cada
uma delas, onde as combinações [2,3,4] e [2,3,4,6] obtêm valores muito próximos e
segundo o critério proposto por Landis e Koch (1977), ambas classificações podem ser
catalogadas como “muito boa”. No entanto para as combinações de bandas [2,3,4 7] e
[2,3,4,8] a qualidade da classificação é considerada como “boa”.
Para avaliar se os índices de exatidão em relação à verdade terrestre apresentam uma
concordância estatisticamente significativa, realizou-se um teste de hipótese utilizando
como base a estatística Z ao nível de confiança de 95%, onde o valor de Z compreende
o intervalo [-1,96<Z<1,96]. Na Tabela 5.16 pode-se observar os resultados da análise
obtida para cada uma das melhores classificações geradas em função das combinações
de bandas. Os resultados indicam que os valores de Z foram maiores que 1,96
mostrando que existe concordância entre as classificações e a verdade terrestre.
TABELA 5.16 – Resultados da análise do valor Kappa para cada matriz de erro das cla- ssificações para 2003.
Combinação de bandas Kappa Variância Estatística Z [2,3,4] 0,6429 0,0000072 239,5947 [2,3,4,6] 0,6249 0,0000074 229,7178 [2,3,4,7] 0,5899 0,0000076 213,9792 [2,3,4,8] 0,5280 0,0000079 187,8540

102
Na Tabela 5.17 analisa-se o valor de Z entre cada uma das classificações para avaliar se
existem diferenças significativas entre elas. Pode-se observar que ao comparar entre as
diferentes classificações das combinações de bandas realizadas, estas são
estatisticamente diferentes, já que os valores de Z são maiores que 1,96. Portanto, será
escolhido como a melhor classificação a que tem maior valor de Kappa, ou seja, a
imagem [2,3,4].
TABELA 5.17 – Resultado na comparação da análise de valor Kappa em diferentes cla- ssificações para o ano 2003.
Comparação Z [2,3,4] versus [2,3,4,6] 4,7108
[2,3,4] versus [2,3,4,7] 13,7767[2,3,4] versus[2,3,4,8] 29,5687
[2,3,4,6] versus [2,3,4,7] 9,0370[2,3,4,6] versus [2,3,4,8] 24,7730[2,3,4,7] versus [2,3,4,8] 15,7226
A continuação na Figura 5.7 apresenta-se o resultado da classificação (mapa) para a
combinação de bandas [2,3,4] que foi de maior valor de Kappa. Os mapas de uso e
cobertura da terra para as diferentes classificações são apresentados no Apêndice B.

103
FIGURA 5.7 – Mapa de classificação de uso e cobertura da terra da combinação de bandas [2,3,4] da imagem ASTER para o ano 2003.
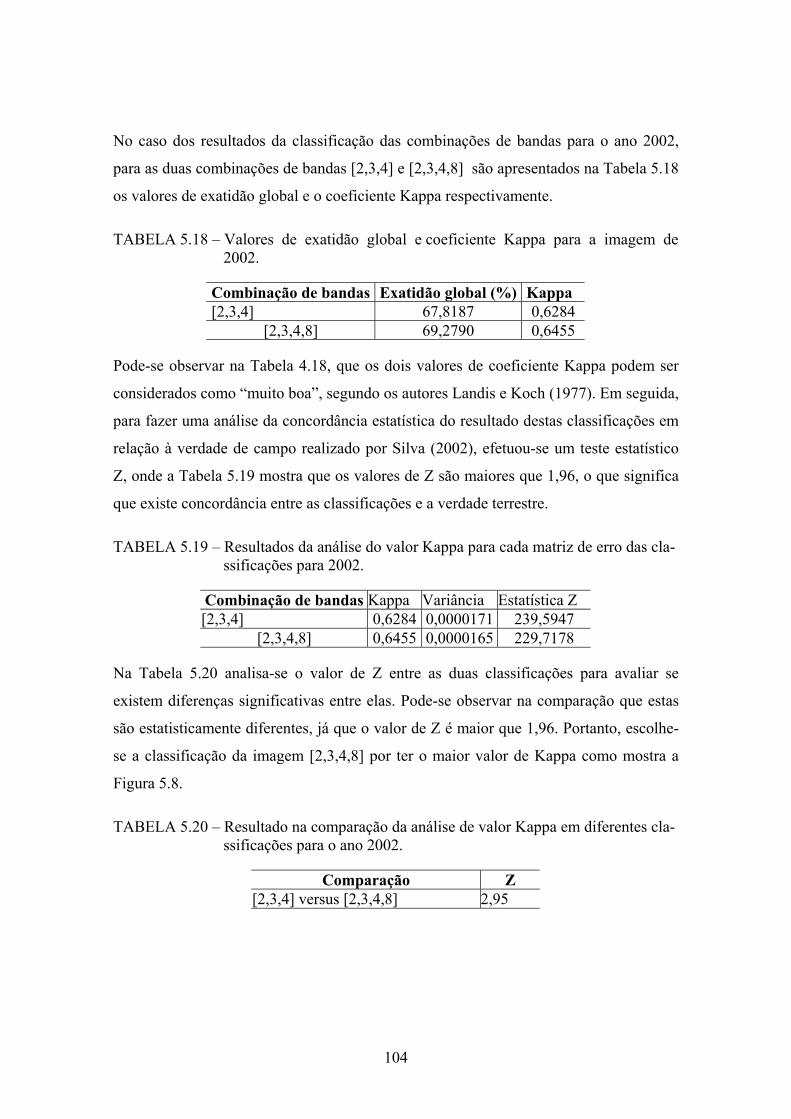
104
No caso dos resultados da classificação das combinações de bandas para o ano 2002,
para as duas combinações de bandas [2,3,4] e [2,3,4,8] são apresentados na Tabela 5.18
os valores de exatidão global e o coeficiente Kappa respectivamente.
TABELA 5.18 – Valores de exatidão global e coeficiente Kappa para a imagem de 2002.
Combinação de bandas Exatidão global (%) Kappa [2,3,4] 67,8187 0,6284
[2,3,4,8] 69,2790 0,6455
Pode-se observar na Tabela 4.18, que os dois valores de coeficiente Kappa podem ser
considerados como “muito boa”, segundo os autores Landis e Koch (1977). Em seguida,
para fazer uma análise da concordância estatística do resultado destas classificações em
relação à verdade de campo realizado por Silva (2002), efetuou-se um teste estatístico
Z, onde a Tabela 5.19 mostra que os valores de Z são maiores que 1,96, o que significa
que existe concordância entre as classificações e a verdade terrestre.
TABELA 5.19 – Resultados da análise do valor Kappa para cada matriz de erro das cla- ssificações para 2002.
Combinação de bandas Kappa Variância Estatística Z [2,3,4] 0,6284 0,0000171 239,5947
[2,3,4,8] 0,6455 0,0000165 229,7178
Na Tabela 5.20 analisa-se o valor de Z entre as duas classificações para avaliar se
existem diferenças significativas entre elas. Pode-se observar na comparação que estas
são estatisticamente diferentes, já que o valor de Z é maior que 1,96. Portanto, escolhe-
se a classificação da imagem [2,3,4,8] por ter o maior valor de Kappa como mostra a
Figura 5.8.
TABELA 5.20 – Resultado na comparação da análise de valor Kappa em diferentes cla- ssificações para o ano 2002.
Comparação Z [2,3,4] versus [2,3,4,8] 2,95

105
FIGURA 5.8 - Mapa de classificação de uso e cobertura da terra da combinação de bandas [2,3,4,8] da imagem ASTER para o ano 2002.

106
5.5 Avaliação Temporal das Imagens 2002 e 2003
Para identificar a mudança no uso e cobertura da terra na área de estudo, realizou-se
uma comparação entre os dois melhores resultados segundo o valor estatístico Kappa
das classificações realizadas pela rede neural ART2. Portanto, para o ano 2002, tomou-
se a classificação da combinação de bandas [2,3,4,8] e para o ano 2003 a combinação de
bandas [2,3,4]. A Tabela 5.21 mostra a quantidade de hectares e porcentagem por classe
temática para as imagens classificadas dos anos 2003 e 2002.
TABELA 5.21 – Área (em hectares) e porcentagem por cada classe temática nas ima- gens de 2002-2003.
CLASSES Área (2002) % Área (2003) % Água 4313,64 1,13 2977,56 0,78Culturas 34318,30 8,99 17407,28 4,56Pasto limpo 41265,94 10,81 32524,13 8,52Pasto sujo 16949,19 4,44 27943,26 7,32Solo exposto 11872,07 3,11 13589,89 3,56Solo com palha 19468,67 5,10 27561,52 7,22F. primária/F. explorada recente 126813,55 33,22 115819,48 30,34Floresta degradada 73408,32 19,23 69476,42 18,20Bambu/Capoeira 53328,88 13,97 74439,02 19,50
Pode-se observar na tabela anterior, que para o ano 2003 houve uma diminuição em
relação ao ano 2002 das classes de Água, Culturas, Pasto limpo, Floresta primária/ F.
explorada recente e Floresta degradada. As diminuições das áreas de Floresta
primária/Floresta explorada recente e Floresta degradada foram ocasionadas porque
muitas destas áreas transformaram-se em áreas agrícolas ou pastagens. Isto se confirma
com o aumento das classes de solo exposto e solo com palha para o ano 2003.
Alguns problemas ocorrem no processo de comparação de uma data em relação a outra
devido à variância sazonal entre ambas e a presença de alvos muito similares em termos
de resposta espectral (por exemplo, capoeira com floresta degradada), ou ser pouco
representativas na cena, como no caso da classe cultura. Por exemplo, no caso da
imagem de 2002, aconteceu que algumas áreas de culturas foram misturadas com pasto
limpo no processo de classificação. Por isso, estas variadas condições ambientais podem
resultar em diferenças importantes entre as mesmas bandas de datas diferentes.
107
CAPÍTULO 6
CONCLUSÕES E RECOMENDAÇÕES
Conclusões
A obtenção de informações sobre a superfície terrestre, a partir de dados provenientes
de sensoriamento remoto a nível orbital, tem demonstrado importância significativa em
processos tais como o monitoramento de recursos florestais ou de mapeamento de uso e
cobertura da terra, em especial o uso das bandas 2 (630-690 nm), 3 (760-860 nm) e 4
(1600-1700 nm).
A arquitetura de rede ART2 inserida no ambiente SGRNA, apresenta características
(como simplicidade e facilidade na entrada e manipulação dos dados) de um adequado
classificador de dados de imagens de satélite. Além disso, os desempenhos na
classificação obtidos pela rede neural, em relação à verdade terrestre, podem ser
considerados satisfatórios, considerando-se as classes temáticas investigadas.
O parâmetro de vigilância é uma variável importante no processo da classificação
realizada pela rede ART2, porque ajuda a controlar o número de padrões a serem
classificados e que este número não seja demasiado grande (por exemplo, para o caso de
valores muito próximos a 1). Os valores de treinamento, teste e conjunto de população
variam dependendo do tamanho da área e do recurso computacional disponível, pois
para valores maiores aumenta-se a exigência no uso deste recurso.
A rede neural ART2 tem um limite na discriminação detalhada das classes, obtendo-se
melhores resultados nas classificações quando houve junção de algumas dessas classes
temáticas, tais como floresta primária com floresta explorada recente e capoeira com
bambu. No caso das culturas presentes na área de estudo (algodão, milho e milheto), o
classificador não conseguiu individualiza-las no espaço de atributos espectrais.

108
No caso da análise dos valores espectrais, estes foram suficientes para uma
discriminação mais detalhada das classes de uso e cobertura da terra, apesar da grande
complexidade temática da região e a sobreposição espectral causada pelo caráter
sazonal das culturas e o processo regenerativo natural da cobertura vegetal.
Adicionalmente às bandas 2, 3, 4, que demonstraram sua utilidade na classificação de
uso e cobertura da terra, as bandas 6 (2185-2225 nm) e 8 (2295-2365 nm) do sensor
ASTER foram as que melhor resultado alcançaram no processo de classificação
realizado pela rede ART2.
O desempenho da rede ART2 foi considerada satisfatório dado à rapidez no
processamento das imagens de tamanho de 6154 linhas e 2749 colunas de 9 bandas (595
MB), com resolução de 15m x 15m. O tempo computacional para gerar uma
classificação foi em média de 10 a 20 minutos (proporcionalmente ao aumento de 3 para
9 bandas) para as imagens formadas pelas diversas combinações de bandas.
Recomendações
A utilização de RNA’s baseadas em algoritmos genéticos, como o caso de ART2
inserida no programa SGRNA, para a classificação de imagens multiespectrais pode ser
considerada como uma excelente alternativa aos classificadores atualmente utilizados e
conseqüentemente deve ser ainda mais investigada. Neste contexto a utilização de
parâmetros incorporados na estrutura da rede neural, que tomem em conta o aspecto da
distribuição espacial dos padrões deve ser investigada.
Outro ponto importante é avaliar se a aplicação da rede neural ART2 consegue atenuar
o efeito de borda entre classes, especialmente em áreas de culturas ou pastagens em
relação às de florestas degradadas, ou em áreas destinadas ao uso agrícola com
ocorrência de fragmentos florestais remanescentes.
Finalmente, sugere-se a utilização e avaliação deste tipo de classificador de rede neural
em outros produtos de sensores remotos que estejam em operacionalização e ao alcance
de comunidade cientifica brasileira como, por exemplo, as imagens geradas pelo satélite
CBERS-2.

109
REFERÊNCIAS BIBLIOGRÁFICAS
Adams, J.; Sabol, D.; Kapos, V.; Almeida Filho, R.; Roberts. D.; Smith, M.; Gillespie, A. Classification of multispectral images based on fractions of endmembers: application to land-cover change in the Brazilian Amazon. Remote Sensing of Environment, v. 52, n. 2, p. 137-154, 1995.
Alves, D.; De Souza, C.; Soares, J.; Yamaguchi, F. Characterizing landscape changes in central Rondonia using Landsat TM imagery. International Journal of Remote Sensing, v. 20, n. 14, p. 2877-2882, 1999.
Apan, A.; Kelly R.; Jensen, T.; Butler, D.; Strong, W.; Basnet, B. Spectral discrimination and separability analysis of agricultural crops and soil attributes using ASTER imagery. In: Australasian Remote Sensing and Photogrammetry Conference, 11. September, 2002, Brisbane – Australia. Proceedings. Brisbane: ARS, 2002, p. 396-411.
Atkinson, P. M.; Tatnall, A.R.L. Neural networks in remote sensing. International Journal of Remote Sensing, v. 18, n. 4, p. 699-709, 1997.
Balée, W. The culture of Amazonian forests. In: Posey, D.; Balle, W. (ed.) Advances in Economic Botany. New York: The New York Botanical Gardens, 1989. cap. 7, p. 1-21.
Batistella, M. Landscape change and land-use/land cover dynamics in Rondônia, Brazilian Amazon. Indiana, 367 p. Tese (Doutorado em Ciências Ambientais) - Indiana University, 2001.
Benediktsson, J.; Swain, P.; Ersoy, O. Neural network approaches versus statistical methods in classification of multisource remote sensing data. IEEE Transactions on Geoscience and Remote Sensing, v. 28, n. 4, p. 540-552, 1990.
Benediktsson, J.; Sveinsson, J. Feature extraction for multisource data classification with artificial neural networks. International Journal of Remote Sensing, v. 18, n. 4, p. 727-740, 1997.
Bloise, P.; Guimarães, R.; Martins, É.; Carvalho, A.; Carvalho, O. Análise de mistura espectral em imagens ASTER no campo de instrução militar de Formosa (GO). In: Simpósio Brasileiro de Sensoriamento Remoto, 11, Belo Horizonte, 2003. Anais. São José dos Campos: INPE, 2003. 1 CD-ROM.
Braga, A; Carvalho, A; Ludermir, T. Fundamentos de redes neurais artificiais. In: 11a. Escola de Computação. Rio de Janeiro: UFRJ. 1998. 246 p.
Brondizio, E.; Moran, E.; Mausel, P.; Wu, Y. Land-use change in the Amazon estuary: patterns of caboclo settlement and landscape management. Human Ecology, v. 22, n. 3, p. 249-278, 1994.

110
Brondizio, E.; Moran, E.; Mausel, P.; Wu, Y. Padrões de assentamento caboclo no baixo Amazonas: análise temporal de imagens de satélite (Landsat TM) para estudos de ecologia humana de populações da Amazônia. In: Simpósio Brasileiro de Sensoriamento Remoto, 7, Curitiba, 1993. Anais. São José dos Campos: INPE, 1993. v. 2, p. 16-26.
Carpenter, G.; Grossberg, S. ART-2: self-organization of stable category recognition codes for analog input patterns. Applied Optics, v. 26, n. 23, p. 4919-4930, 1987.
Caselles, V.; López García, M. J. An alternative simple approach to estimate atmospheric correction in multitemporal studies. International Journal of Remote Sensing, v. 10, n. 6, p. 1127-1134, 1989.
Chen, S. C.; Godoy Jr., M.; Herz, R. Correção atmosférica através do método de subtração - aplicabilidade para analisar imagens da região amazônica. São José dos Campos: INPE, 1995. 12 p. (INPE-5622-NTC/316).
Chuvieco, E. Teledetección ambiental: la observación de la Tierra desde el espacio. Barcelona: Ed. Ariel Ciencia, 2002. 568 p.
Congalton, R.; G. Green, K. Assessing the accuracy of remotely sensed data: principles and practices. New York: Lewis Publishers, 1999. 137 p.
Crosta, A. Processamento digital de imagens de sensoriamento remoto. Campinas: UNICAMP, 1993. 170 p.
Da Cruz, N.; Galo, M. Aplicação de redes neurais artificiais na classificação de imagens multitemporais e multisensor. In: Colóquio Brasileiro de Ciências Geodésicas, 3, Curitiba, 2003. Anais. Curitiba: UFPR, 2003. 1 CD-ROM.
Diverio, V., Formaggio, A.; Shimabukuro, Y. A new approach to identify land use and land cover areas in Brazilian Amazon areas using neural networks and IR-MSS fraction images from CBERS satellite. In: IGARSS, Toulouse, 2003. Proceedings. Toulouse: IEEE, July, 2003. 1 CD-ROM.
Du, Y.; Cihlar, J.; Beaubien, J.; Latifovic, R. Radiometric normalization, composition, and quality control for satellite high resolution image mosaics over large areas. IEEE Transactions on Geoscience and Remote Sensing, v. 39, n. 3, p. 623-634, 2001.
EMBRAPA. Centro Nacional de Pesquisa de Solos. Sistema brasileiro de classificação de solos. Brasília, Embrapa, 1999. 412 p.
Empresa Mato-Grossense de Pesquisa e Extensão Rural S/A (EMPAER-MT). Calendário Agrícola. Disponível em: <http://www.empaer.mt.gov.br/>. Acesso em: ago/2003.
ENGESAT Terra/ASTER. Disponível em: <http://www.engesat.com.br/satelites/aster.htm>. Acesso em 28 jan 2002.
Earth Remote Sensing Data Analysis Center (ERSDAC). Crosstalk correction software – User’s Guide. Tokyo: ERSDAC, 2001. 16 p.

111
Escada, M.I.S. Evolução de padrões da terra na região centro-norte de Rondônia. 264 p. (INPE-10209-TDI/899). Tese (Doutorado em Sensoriamento Remoto) - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 2003.
Fearnside, P. Deforestation in the Brazilian Amazon: How fast is it occurring?. Interciência, v. 7, n. 2, p. 82-88, 1982.
Gan, K.; Lua, K. Chinese character classification using adaptive resonance network. Pattern Recognition, v. 25, n. 8, p. 877-882, 1992.
Hall, F. G.; Strebel, D. E.; Nickeson, J. E.; Goetz, S. J. Radiometric rectification: toward a common radiometric response among multidate, multisensor images. Remote Sensing of Environment, v. 35, n. 1, p. 11-27, 1991.
Hayashi, S.; Alencar, A. Métodos comparativos para a detecção de extração seletiva de madeira no oeste paraense utilizando modelo linear de mistura espectral de pixel. In: Simpósio Brasileiro de Sensoriamento Remoto, 11, Belo Horizonte, 2003. Anais. São José dos Campos: INPE, 2003. 1 CD-ROM.
Hepner, G.; Logan, T.; Ritter, N.; Bryant, N. Artificial neural network classification using a minimal training set: comparison to conventional supervised classification. Photogrammetric Engineering and Remote Sensing, v. 56, n. 4, p. 469-473, 1990.
Hill, J.; Sturn, B. Radiometric correction of multitemporal Thematic Mapper data for use in agricultural land-cover classification and vegetation monitoring. International Journal of Remote Sensing, v. 12, n. 7, p. 1471-1491, 1991.
Holland, J. Adaptation in natural and artificial systems. Michigan: The University of Michigan Press, 1975.
Instituto Brasileiro de Geografia e Estatística (IBGE). SIDRA. Disponível em: <http://www.sidra.ibge.gov.br/bda/tabela/protabl.asp?z=t&o=11>. Acesso em: ago/2003.
Instituto Nacional de Pesquisas Espaciais (INPE). Projeto PRODES. Disponível em: <http://www.obt.inpe.br/prodes.html>. Acesso em: nov/2003.
Iwasaki, A.; Fujisada, H.; Akao, H.; Shindou, O.; Akagi, S. Enhancement of Spectral Separation Performance for ASTER/SWIR. In: Annual Meeting SPIE, 47, 2001. San Diego, USA, Proceedings. San Diego: SPIE, 2001, p. 42-50.
Jet Propulsion Laboratory (JPL). Advanced Spaceborne Thermal and Reflection Radiometer (ASTER). Disponível em: <http://asterweb.jpl.nasa.gov/default.htm>. Acesso em: 15 Janeiro 2003.
Kanellopoulos, I.; Varfis, A.; Wilkinson, G. Land cover discriminations in SPOT HRV imagery using artificial neural network: a 20 class experiment. International Journal of Remote Sensing, v. 13, n.5, p. 917-924, 1992.
Kato, M.; Syoji, M.; Oyanagi, M. ASTER status and data application use. In: Asian Conference on Remote Sensing, 22. Singapore, 2001. Proceedings. Singapore: ACSR, 2001, p. 1297-1302.

112
Lambin, E. Modelling deforestation process: a review. Luxembourg: Ed. TREES SERIES B: Research Report N°1. European Comission (EUR 15744), 1994. 128 p.
Landis, J.; Koch, G. G. The measurements of agreement for categorical data. Biometrics, v. 33, n. 3, p. 159-179, Mar. 1977.
Lee, J.; Weger, R.; Sengupta, S.; Welch, R.. A neural network approach to cloud classification. IEEE Transactions on Geoscience and Remote Sensing, v.28, n.5, p.846-55, 1990.
Lillesand, T. M.; Kiefer, R. W. Remote sensing and image interpretation. 3. ed. New York: John Wiley & Sons, 2000. 724 p.
Lorena, R. Espacialização da dinâmica do uso da terra em porção da Amazônia Ocidental (Acre), através de técnicas de detecção de mudanças. 2001. 92 p. (INPE-9650-TDI/846). Tese (Mestrado em Sensoriamento Remoto) - Instituto Nacional de Pesquisas Espaciais (INPE), São José dos Campos, 2001.
Mah, A.; Lim, T. Mapping surface cover types using ASTER data. 2002. In: MAP ASIA 2002 - Asian Conference on GIS, GPS, Aerial Photography and Remote Sensing, 2002, Bangkok, Thailand. Proceedings. Bangkok: MAP ASIA, August, 2002, 3 p.
Mas, J. An artificial neural networks approach to map land use/cover using Landsat imagery and ancillary data. In: IGARSS, Toulouse, 2003. Proceedings. Toulouse: IEEE, July, 2003.
Mather, P. M. Computer processing of remotely sensed images: an introduction. New York: John Wiley & Sons, 1999. 292 p.
Moderate Resolution Imaging Spectroradiometer (MODIS). MODIS Atmosphere: Water Vapor product. Disponível em: <http://modis-atmos.gsfc.nasa.gov/MOD05_L2/acquiring.html>. Acesso em: 24 agosto 2003.
Moran, E.; Brondizio, E.; Mausel, P.; Wu, Y. Integrating Amazonian vegetation, land-use and satellite data. BioScience, v. 44, n. 5, p. 329-339, 1994.
Moran, E.; Herrera, R. Human Ecology in the Amazon. Interciência, v.9, n. 6, p. 342-343, 1984.
Moran, E.; Packer, A.; Brondizio, E.; Tucker, J. Restoration of vegetation cover in the eastern Amazon. Ecological Economics, v. 18, n. 1, p. 41-54, 1996.
Nascimento, P.; Batista, G.; Almeida Filho, R. Efeito de pré-processamento (ajuste) no desempenho de segmentação e classificação de imagens Landsat/TM. In:Simpósio Brasileiro de Sensoriamento Remoto, 9, 1998. Anais . Santos: INPE, 1998. 1 CD-ROM.
Nepomuceno, A, Classificação de dados de radar na banda P utilizando rede neural artificial para o mapeamento de cobertura da terra na região de Santarém - Pará. 121 p. (INPE-5522-TDI/519). Tese (Mestrado em Sensoriamento Remoto), Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 2003.
Nepstad, D.; Moreira, A; Alencar, A. A floresta em chamas, origens, impactos e prevenção de fogo na Amazônia: programa piloto para a proteção das florestas tropicais do Brasil. Brasília: Banco Mundial, 1999. 180 p.

113
Novo, E. M. L. M. Sensoriamento remoto: princípios e aplicações. São Paulo: Edgard Blucher, 1992. 308 p.
Olsson, H. Regression functions for multitemporal relative calibration of Thematic Mapper data over boreal forest. Remote Sensing of Environment, v. 46, n. 1, p. 89-102, 1993.
Pereira, J.; Batista, G.; Roberts, D. Classificação da cobertura da terra na região Amazônica através de classificação de regiões em imagens de proporção de componentes. In: Simpósio Brasileiro de Sensoriamento Remoto, 9, 1998. Anais. Santos: INPE, 1998. 1 CD-ROM.
Peddle, D.; Foody, G.; Zhang, A.; Franklin, S.; Ledrew, E. Multisource image classification II: an empirical comparison of evidential reasoning, linear discriminant analysis, and maximum likelihood algorithms for alpine land cover classification. Canadian Journal of Remote Sensing, v. 20, n.4, p.397-408, 1994.
Pereira, M.; Kurkdjan, M.; Pinto, S. Técnicas de sensoriamento remoto e de geoprocessamento para mapeamento e análise do uso da terra. São José dos Campos: Instituto Nacional de Pesquisas Espaciais, 1994. 19 p. (INPE-5566-RPQ/666).
Pires, J.; Prance, G. The vegetation types of the Brazilian Amazon. In: Prance, G. e Lovejoy, T. ed. Key Environments Amazonia. Oxford, UK: Pergamon Press, 1986, p. 109-145.
Projeto RADAMBRASIL. Folha SC. 21 – Juruena; geologia, geomorfologia, solos, vegetação e uso potencial da terra. Rio de Janeiro: DNPM, (Levantamento de Recursos Naturais, v. 20), 1980.
Puzzolo, V.; De Natale, F.; Giannetti, F. Forest species discrimination in an alpine mountain área using a fuzzy classification of multi-temporal SPOT (HRV) data. In: IGARSS, 2003. Toulouse. Proceedings. Toulouse: IEEE, July, 2003.
Rangsanseri, Y.; Thitimajshima, P.; Kanotai, S. Multispectral image segmentation using ART1/ART2 neural networks. . In: Asian Conference on Remote Sensing, 22. Singapore, 2001. Proceedings. Singapore: ACRS, 2001. p. 187-191.
Richards, J. Remote sensing digital image analysis: an introduction. Berlin: Springer-Verlag, 1995. 340 p.
Roper, J.; Ralph, W.; Roberts, R. Deforestation: Tropical Forest in Decline. Quebec. Disponível em: <http://www.rcfa-cfan.org/english/issues.12.html>. Canadian International Development Agency (CIDA), 1999. Acesso em: nov/2003.
Ryan, T.; Sementilli, P.; Yuen, P.; Hunt, R. Extraction of shoreline features by neural nets and image processing. Photogrammetric Engineering and Remote Sensing, v.57, n.7, p. 947-55, 1991.
Saito, G.; Ishitsuka, N.; Matano, Y.; Kato, M. Application of Terra/ASTER data on agriculture land mapping. In: Asian Conference on Remote Sensing, 22. Singapore, 2001. Proceedings. Singapore: ACRS, 2001. p. 1-6.

114
Salimon, C.; Victoria, R.; Brown, I.; Stone, T.; Davidson, E. Mudança de cobertura da terra e fluxo de CO2 do solo para atmosfera na Amazônia sulocidental. In: Simpósio Brasileiro de Sensoriamento Remoto, 11, 2003. Belo Horizonte. Anais. Belo Horizonte: INPE, 2003. 1 CD-ROM.
Santos, J.; Santos, A.; Aquino, L. Avaliação da cobertura vegetal e uso da terra nas áreas programa do PDRI-AM, através da técnica de sensoriamento remoto. São José dos Campos: INPE, 1983. 68 p. (INPE-2701-NTE/199).
Santos, J.; Venturieri, A.; Machado, R. Monitoring land use in Amazonia based on image segmentation and neural networks. In: International Geoscience and Remote Sensing Symposium (IGARSS), 1995, Firenze, Italy. Proceedings. Firenze: IEEE, July, 1995.
Santos, J.; Shimabukuro, Y.; Duarte, V.; Alencastro Graça, P.; Silva, P. Linear spectral mixture model as a tool for monitoring deforestation and timber exploitation in the Brazilian Amazon. In: Remote Sensing for Agriculture Ecosystems and Hydrology, 4, 2002. Agia Pelagia, Greece, Proceedings. Agia Pelagia: SPIE, September, 2002, p. 320-325.
Serrão, E.; Nepstad, D.; Walker, R. Upland agricultural and forestry development in the Amazon: sustainability, criticality and resilience. Ecological Economics, v. 18, n. 1, p. 3-13, 1996.
Sioli, H. The Amazon and its main affluents: Hidrology, morphology of the rivers courses and river types. In: Sioli, H. (ed.). The Amazon: Limnology and landscape ecology of a mighty tropical river and its basin. Dordrecht, The Netherlands: Dr. W. Junk Publishers, 1984, p. 126-165.
Silva, N. Classificação semi-automática de imagens de sensoriamento remoto por meio de síntese genética de redes neurais artificiais. Brasília, 121 p. Tese (Doutorado em Geociências) - Universidade de Brasília, 2003.
Silva, P. Anotações do trabalho de campo. (Instituto Nacional de Pesquisas Espaciais, mar, 2002). Comunicação pessoal.
Silva, P.; Santos, J.; Shimabukuro, Y.; Souza, P. Change vector analysis technique to monitor selective logging activities in Amazon. [CDROM] In: International Geoscience and Remote Sensing Symposium (IGARSS), Toulouse, 2003. Proceedings. Toulouse: IEEE, July, 2003.
Sombroek, W. Soils of the Amazon Region. In: Sioli, H., ed. The Amazon: Limnology and landscape ecology of a mighty tropical river and its basin. Dordrecht, The Netherlands: Dr. W. Junk Publishers, 1984, p. 521-535.
Steininger, M. Tropical secondary forest regrowth in Amazon: age, area and change estimation with Thematic Mapper data. International Journal of Remote Sensing, v. 17, n. 1, p. 9-28, 1996.
Teixeira, C. Florestas Sociais – uma resposta à destruição das Florestas Tropicais?. 170 p. Tese (Mestrado em Desenvolvimento, Agricultura e Sociedade). Universidade Federal Rural do Rio de Janeiro, Seropédica, 2001.

115
Thome, K.; Palluconi, F.; Takashima, T.; Masuda, K. Atmospheric correction of ASTER. IEEE Transactions on Geoscience and Remote Sensing, v. 36; n. 4, p. 1199-1211, 1998.
Toutin, T 3D topographic mapping with ASTER stereo data in rugged topography. Ontario: Canada Centre for Remote Sensing, 2002.
Valle Filho, A.; Carraro, J.; Bastos, L.; Pezzi, S.; Romão, W. Uma visão geral sobre rede neural artificial com arquitetura ART2. Revista Tecnológica, v.6, n.1, p. 59-71, 1997.
Watrin, O. Análise da dinâmica da paisagem agrícola da Amazônia Oriental: abordagem integrando técnicas de processamento digital de imagens e sistemas de informações geográfica. 175p. (INPE-5631-TDI/555). Tese (Mestrado em Sensoriamento Remoto) - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 1994.
Watrin, O.; Santos, J.; Valério Filho, M. Análise da dinâmica na paisagem do nordeste paraense através de técnicas de geoprocessamento. [CD-ROM] In: Simpósio Brasileiro de Sensoriamento Remoto, 8, Salvador, 1996. Anais. São José dos Campos: INPE, 1996.
Yamaguchi, Y.; Fujisada, H.; Kahle, A.; Tsu, H.; Kato, M.; Watanabe. H.; Sato, I.; Kudoh, M. ASTER instrument performance, operation status, and application to Earth Sciences. IEEE Transactions on Geoscience and Remote Sensing, v. 36, n. 6, p. 1215-1216, 2001.

116

117
APÊNDICE A
MATRIZES DE ERRO E INDICADORES DE EXATIDÃO PARA AS
DIFERENTES CLASSIFICAÇÕES
*A: água; C: cultura; Pl: pasto limpo; Ps: pasto sujo; Se: solo exposto; Sp: solo com palha;
Fp/Fe: floresta primária/floresta explorada recente; Fd: floresta degradada; B/Ca: Floresta
secundaria com bambu/ Floresta secundaria ou capoeira.
TABELA – A1: Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4] de 2003.
Classes A C Pl Os Se Sp Fp/Fe Fd B/Ca Total Erro de
InclusãoA 1974 0 0 0 0 0 0 0 0 1974 0C 0 4625 0 0 1094 57 0 0 0 5776 19,9Pl 0 57 2315 631 0 31 1 0 0 3035 23,7Ps 0 0 727 2723 0 0 79 56 53 3638 25,1Se 0 771 0 0 1912 670 8 0 0 3361 43,1Sp 0 983 0 0 619 2693 0 0 0 4295 37,3
Fp/Fe 0 0 0 0 0 0 4596 42 924 5562 17,4Fd 0 0 0 21 0 0 1073 1441 197 2732 47,2
B/Ca 0 0 0 2444 0 0 502 1000 4167 8113 48,6Total 1974 6436 3042 5819 3625 3451 6259 2539 5341 38486
Erro de Omissão 0 28,1 23,9 53,2 47,3 22,0 26,6 43,2 22,0
TABELA – A2: Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4,6] de 2003.
Classes A C Pl Ps Se Sp Fp/Fe Fd B/Ca Total Erro de
InclusãoA 1974 0 0 0 0 0 0 0 0 1974 0C 0 4671 0 0 1259 155 0 0 0 6085 23,2Pl 0 17 2271 598 0 16 0 0 0 2902 21,7Ps 0 0 771 2345 0 0 178 179 85 3558 34,1Se 0 733 0 0 1757 587 0 0 0 3077 42,9Sp 0 1000 0 0 609 2688 0 0 0 4297 37,4
Fp/Fe 0 0 0 0 0 0 4472 3 728 5203 14,0Fd 0 15 0 128 0 5 841 1349 204 2542 46,9
B/Ca 0 0 0 2748 0 0 768 1008 4324 8848 51,1Total 1974 6436 3042 5819 3625 3451 6259 2539 5341 38486
Erro de Omissão 0 27,4 25,3 59,7 51,5 22,1 28,5 46,9 19,0

118
TABELA A 3 : Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4,7] de 2003.
Classes A C Pl Ps Se Sp Fp/Fe Fd B/Ca Total Erro de
InclusãoA 1974 0 0 0 0 0 0 0 0 1974 0C 0 4513 0 0 1077 57 0 0 0 5647 20,1Pl 0 8 2501 706 0 50 1 0 0 3266 23,4Ps 0 0 535 1334 0 0 66 40 16 1991 33,0Se 0 878 0 0 1930 668 6 0 0 3482 44,6Sp 0 1037 6 0 618 2676 0 0 0 4337 38,3
Fp/Fe 0 0 0 0 0 0 4121 11 673 4805 14,2Fd 0 0 0 46 0 0 919 1076 128 2169 50,4
B/Ca 0 0 0 3733 0 0 1146 1412 4524 10815 58,2Total 1974 6436 3042 5819 3625 3451 6259 2539 5341 38486
Erro de Omissão 0 29,9 17,8 77,1 46,8 22,5 34,2 57,6 15,3
TABELA A 4 : Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4,8] de 2003.
Classes A C Pl Ps Se Sp Fp/Fe Fd B/Ca Total Erro de
InclusãoA 1922 0 0 0 0 0 0 0 0 1922 0C 0 4685 0 0 1253 143 0 0 0 6081 23,0Pl 0 37 2352 649 0 24 10 0 0 3072 23,4Ps 0 0 689 1583 0 0 56 30 29 2387 33,7Se 52 1521 1 0 1754 3272 0 0 0 6600 73,4Sp 0 193 0 0 618 12 0 0 0 823 98,5
Fp/Fe 0 0 0 0 0 0 4500 1 858 5359 16,0Fd 0 0 0 322 0 0 995 1467 158 2942 50,1
B/Ca 0 0 0 3265 0 0 698 1041 4296 9300 53,8Total 1974 6436 3042 5819 3625 3451 6259 2539 5341 38486
Erro de Omissão 2,6 27,2 26,7 72,8 51,6 99,6 28,1 42,2 19,6

119
TABELA A 5 : Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4,8] de 2002.
Classes A C Pl Ps Se Sp Fp/Fe Fd B/Ca Total Erro de
InclusãoA 952 0 0 0 0 0 0 0 0 952 0C 0 996 434 1184 0 0 46 77 3 2740 63,65Pl 0 0 1481 15 8 0 35 126 1 1666 11,10Ps 0 0 219 39 0 0 8 40 0 306 87,25Se 0 0 0 0 1064 0 0 33 0 1097 3,01Sp 0 0 0 0 116 1431 0 23 0 1570 8,85
Fp/Fe 0 0 0 0 0 0 3531 175 0 3706 4,72Fd 0 484 0 634 0 0 610 1112 201 3041 63,43
B/Ca 0 60 0 104 0 0 117 296 780 1357 42,52Total 952 1540 2134 1976 1188 1431 4347 1882 985 16435
Erro de Omissão 0 35,32 30,60 98,03 10,44 0 18,77 40,91 20,81
TABELA A 6 : Matriz de erro e indicadores de exatidão para a classificação da imagem [2,3,4] de 2002.
Classes A C Pl Ps Se Sp Fp/Fe Fd B/Ca Total Erro de
InclusãoA 952 0 0 0 0 0 0 0 0 952 0C 0 1018 249 1158 0 0 91 86 1 2603 60,89Pl 0 0 1485 17 15 23 24 62 0 1626 8,67Ps 0 7 400 123 0 0 6 45 0 581 78,83Se 0 0 0 0 1060 5 11 65 0 1141 7,10Sp 0 0 0 0 113 1403 0 6 0 1522 7,82
Fp/Fe 0 0 0 0 0 0 3482 483 10 3975 12,40Fd 0 171 0 571 0 0 650 673 24 2089 67,78
B/Ca 0 344 0 107 0 0 83 462 950 1946 51,18Total 16435
Erro de Omissão 0 33,90 30,41 93,78 10,77 1,96 19,90 64,24 3,55

120

121
APÊNDICE B
MAPAS DE USO E COBERTURA DA TERRA

122

123

124





























