Embed Size (px)
Citation preview

1
Posicionamento1. Definição: determinação da posição de um qualquer ponto
num qualquer sistema de referência, onde as respectivas coordenadas são obtidas por um dado método (matemático) que recorre a uma determinada técnica (instrumental).- A posição deve ser independente da técnica utilizada, ao passo que a respectiva precisão de posicionamento é dependente do método e técnica utilizados.
1.1 Tipos de Posicionamento: Absoluto e Relativo.
1.2 O Posicionamento é exemplo do Problema Directo da geodesia: determinar as coordenadas a partir das observações entre as estações, ou entre as estações e os pontos de referência
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
Posicionamento
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
POSICIONAMENTO
TÉCNICA DE POSICIONAMENTO
SISTEMA DE REFERÊNCIA
ABSOLUTO
RELATIVO

2
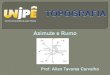
Posicionamento Absoluto 2.1 Exemplo GPS: determinação directa das coordenadas
geodésicas de um ponto com um único receptor.
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
Absoluto (1 estação)
Estação K
SV2
SV1
SV3
SV4
? 1k
? 2k ? 3
k
? 4k
(Xk, Yk, Zk, dtk)
+−+−+−=
+−+−+−=
+−+−+−=
+−+−+−=
kkkkk
kkkkk
kkkkk
kkkkk
CdtZZYYXXP
CdtZZYYXXP
CdtZZYYXXP
CdtZZYYXXP
2424244
2323233
2222222
2121211
)()()(
)()()(
)()()(
)()()(
Posicionamento Absoluto 2.2 Exemplo Astronomia Geodésica: determinação directa das
coordenadas astronómicas de uma estação por observação de estrelas nas sua passagem meridiana ou no cruzamento do almucântara Z=30º.
Dados1: posições médias aparentes das estrelas (α, δ) do FK5;Dados2: TsidMG, Xp, Yp, ∆TUCObservações: distâncias zenitais e TU
Método da Latitude: Pares de Estrela em passagens superiores opostas (Talcot);
Método da Longitude: Registos TU em posições sim étricas na culminação superior;
Métodos combinado: Cruzamento com o almucântara Z=30º.
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG

3
Posicionamento relativo 3. Método Terrestre
a) Este posicionamento resulta da observação por métodos directos e/ou indirectos da distância, azimute e distância zenital (coordenadas polares no sistema de referência geodésico local) de uma estação para outra:
∴ Problema Directo da Geodesia
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
∆hdE
dI
XGL
ZGL
YGL
β α
),,d(hhh),,d(),,d(
1212
1212
1212
βα∆βαλ∆λλβαϕ∆ϕϕ
+=+=+=
Posicionamento relativo 3.1 Observações geodésicas clássicas
a) São as grandezas necessárias à determinação de coordenadas dos vértices de uma rede geodésica:
1 – Azimutes Astronómicos2 – Ângulos (direcções) azimutais3 – Distâncias (bases geodésicas)4 – Ângulo Zenitais5 – Desníveis (nivelamento geom étrico)
b) Sendo obtidas num sistema AL, estas devem ser sujeitas às típicas correcções instrumentais e atmosféricos, e às correcções de redução ao elips óide (AL →GL→G).
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG

4
Posicionamento relativo
3.2 Terrestre Tridimensional – com (Φ, Λ)a) Vector topocêntrico (inter-estação) de Pi para Pj:
b) transformação para o sistema TC
c) Vector posição Pj no sistema TC
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
==
ij
ijij
ijij
ijALijij
ALij
Zcos
senAsenZAcossenZ
durr r∆∆
( ) ALij2i2i3
TCij r.P
2RRr
rr∆Φ
πΛπ∆ ⋅
−⋅−=
TCji
TCi
TCj rrr
rrr∆+= TC
ijTCi
TCj )Z,Y,X()Z,Y,X()Z,Y,X( ∆∆∆+=
Posicionamento relativo
3.3 Terrestre Tridimensional – com (ϕ, λ) e (η, ξ)a) Transformar o vector topocêntrico (inter-estação) para sistema GL:
b) transformação para o sistema geodésico G
c) Vector posição Pj no sistema G
d) Transformação para TC
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
( ) GLij2i2i3
Gij r.P
2RRr
rr∆φ
πλπ∆ ⋅
−⋅−=
Gji
Gi
Gj rrr
rrr∆+=
( ) ( ) ( ) ALiji1i2ijij3
GLij r.RRARr
rr∆ηξα∆ ⋅−⋅−=
Gjzyx
TCTCj rRRRrr
rrr⋅⋅⋅+= )()()( 3210 εεε
Gij
Gi
Gj )Z,Y,X()Z,Y,X()Z,Y,X( ∆∆∆+=

5
Posicionamento relativo
4. Métodos Extraterrestresa) Neste métodos de posicionamento, a partir de 2 ou mais pontos, são efectuadas medições em simultâneo para um ou mais objectos espaciais:
b) Dependendo do método utilizado, pode-se obter apenas a direcção do vector (co-senos directores) que une as estações ou, então, o vector completo (componentes);
c) A generalidade dos métodos:1 – Sistema de posicionamento de Interferometria de base longa – VLBI;2 – Sistemas de posicionamento relativo com laser – LLR e SLR;3 – Sistema de Posicionamento - DORIS (Détermination d’Orbit e Radiopositio-nnement Integrés par Satellite);4 – Sistemas Global de Navegação por Satélite - GPS, Glonass e Galileu;
d) Ver descrição dos métodos em Vanícek and Krakiwski (1981, §16.1)
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
Posicionamento relativo
4.1 VLBIa) Princípio do método de Rádio- Interferometria de base longa
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG

6
Posicionamento relativo
4.2 SLR - rede do ILRSa) Uma estação envia cerca de 1015
fotões/impulso e regressam apenas 2-3 fotões/impulso, suficiente para medir a distância estação-satélite.
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
Posicionamento relativo
4.3 DORISa) O sistema baseia-se no efeito Doppler
- a frequência do sinal recebido no satélite
difere da frequência de transmissão na
estação;
b) É utilizado para: determinação de órbitas
estudos do campo gravítico e da rotação
da Terra; posicionamento de precisão e
navegação de satélite.
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG

7
Posicionamento relativo
4.4 GPS
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
Relativo/diferencial(2 ou mais receptores)
Estação mEstação k
qp
Vector
( , , ) ( , , ) ( , , )X Y Z X Y Z X Y Zm m m k k k= + ∆ ∆ ∆
Posicionamento relativo 4.4 GPS
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
Pseudo-distância – tempo de percurso do sinal, desde o sat élite até ao receptor, medida a partir do desfasamento do código PRN e convertida em distância.
SATÉLITE
RECEPTOR
Código emitido pelo Satélito
Código gerado no Receptor
∆tDesfasamento dos Relógios
∆t = tp + δ ts + δ tr + εatPsr = C ∆ t
Fase de batimento da onda portadora – diferença de fase entre a fase do sinal gerado no receptor e a fase do sinal proveniente do satélite.
)t(ruido)t(
ruido)1(N)t()t()t(sr
sr
srr
ssr
λϕ=+ρ
++ϕ−ϕ=ϕ
λ ∆φ

8
Posicionamento relativo 4.4 GPS
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
[ ] [ ]{ } pqkm
qm
qk
pm
pk
qkm
pkm
pqkm N)t()t()t()t(
Cf
+ρ−ρ−ρ−ρ−=∆−∆=∆
Diferenças duplas da fase observada
q
ϕ ϕρ
ϕkp
Tp k
p
k kpt t
f tC
t N( ) ( )( )
( ) ( )= − − + 1Fase observada
Esta ção k
p
Diferenças simples da fase observada
[ ] [ ] pkmmk
pm
pk
pm
pk
pkm N)t()t()t()t(
Cf
)t()t( +ϕ−ϕ−ρ−ρ−=ϕ−ϕ=∆
Esta ção m
Vector
Diferenças triplas da fase observada
∇ = + −kmpq
kmpq
kmpqt t∆ ∆( ) ( )1
Problema Inverso da Geodesia
5. Definição: dadas as coordenadas de dois pontos Pi e Pj no sistema geodésico G, calcular a distância espacial, o azimute e a distância zenital (coordenadas polares no sistema geodésico local GL).
5.1 Posicionamento relativo tridimensional geodésico
com e matriz de inversão de y
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
( ) Giji3i22
GLij rR
2RPr
rr∆πλ
πφ∆ ⋅−⋅
−⋅=
Gij
ij
ijG
ij
zzyyxx
r
−−−
=∆
−=
100010001
P2

9
Problema Inverso da Geodesia 5.1 Posicionamento relativo tridimensional geodésico
Resolvendo a seguinte relação em ordem às observações
obtém-se
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
==
ij
ijij
ijij
ijGLijij
GLij
Zcos
sensenZcossenZ
rurr αα
∆∆∆ r
( )
=
++=
++==
2-rzarcsenZ
yxx
yarctg2
zyxrr
ijijGLij
2ij
2ijij
ijGLij
2ij
2ij
2ijij
GLij
π∆∆
∆∆∆
∆α
∆∆∆∆∆r
Problema Inverso da Geodesia 5.2 Posicionamento relativo tridimensional astronómico
ou
resultando
IntroduIntroduçção ão àà Geodesia Geodesia –– Aula 20Aula 20 FCULFCUL--EGEG
( ) TCiji3i22
ALij rR
2RPr
rr∆πΛπΦ∆ ⋅−⋅
−⋅=
( ) ( ) GLijij32i1
ALij rRR)(Rr
rr∆δαξη∆ ⋅−⋅⋅−=
( )
π∆∆=
∆+∆+∆
∆=
2-rzarcsenZ
yxx
yarctg2A
ijijALij
2ij
2ijij
ijALij