Embed Size (px)
Citation preview

PRH-ANP 45
PROGRAMA MULTIDISCIPLINAR EM TECNOLOGIA DE
PETRÓLEO, GÁS NATURAL E BIOCOMBUSTÍVEIS
Controle Avançado de Técnicas de Perfuração com Pressão Controlada
Taís de Carvalho Calado
Orientador: Oscar Alberto Zanabria Sotoayor, D. Sc.,

ii
Controle Avançado de Técnicas de Perfuração com Pressão Controlada
Taís de Carvalho Calado
Trabalho de Conclusão de Curso submetido ao Corpo Docente do Departamento de Engenharia
Elétrica (DEL) e do Programa de Recursos Humanos da ANP/Universidade Federal de Sergipe,
como parte dos requisitos necessários à obtenção do grau de Engenheira Eletricista com
habilitação em eletrônica especialização em Tecnologia de Petróleo, Gás Natural e
Biocombustíveis.
Examinado em 03/07/2012.
Examinado por:
_________________________________________
Oscar Alberto Zanabria Sotomyaor
(D. Sc., Engenharia Elérica – DEL/CCET/UFS)
(Orientador)
_________________________________________
José Jailton Marques
(D. Sc., Engenharia Química – DEQ/CCET/UFS)
_________________________________________
Eduardo Oliveira Freire
(D. Sc., Engenharia Elétrica – DEL/CCET/UFS)

iii
Agradecimentos
Aos meus pais Heliana e Murilo, meus amores e maiores exemplos do que eu devo ser
como pessoa e profissional.
Aos meus irmãos Bruna e Leandro por todo o apoio que vocês me derem desde o início
da minha jornada até esse final.
Ao meu namorado Renan por estar sempre comigo e me ajudar nas horas que achei que
não fosse conseguir, por não me deixar desistir e por a melhor coisa que me aconteceu
dentro da UFS.
Aos meus amigos da turma 07 e agregados pelas horas de estudo que vocês tornaram
divertidas e pelos momentos fora classe.
Ao meu orientador Oscar Sotomayor pelo apoio e dedicação ao longo desses quase 2
anos sob o qual estou em sua tutoria.
A ANP e principalmente ao PRH-45 pelo incentivo financeiro ao longo da minha
participação nesse projeto.

iv
Resumo
Enquanto que a demanda por petróleo tem aumentado, as reservas de petróleo
estão cada vez mais difíceis de serem acessadas e perfuradas. Assim para conseguir
perfurá-las um gradiente de pressão no poço deve ser mantido entre as restrições de
pressão da formação. A pressão no poço pode ser controlada restringindo o fluxo do
fluido de perfuração do poço, através de uma válvula na entrada do poço, ou
manipulando o escoamento vindo da região anular do poço, através da válvula choke.
Neste trabalho, dois algoritmos de controle preditivo baseado em modelos (MPC), um
linear (LMPC) e outro não linear (NMPC), para controle de pressão manipulando a
válvula choke e bomba de entrada de lama, são apresentados como alternativa para
melhorar a eficiência da técnica de perfuração com pressão controlada (MPD).
O objetivo desse trabalho visa efetuar uma comparação entre os dois algoritmos
MPC e sua efetiva aplicação e utilização no controle da pressão durante o processo de
perfuração de poços de petróleo.
Palavras-chave: MPC, MPD, perfuração de poço, controle da pressão.

v
Abstract
While oil demand has increased, the remaining reserves of oil are increasingly
difficult to be accessed and drilled. Then to get them drilled, a pressure gradient in the
well must be maintained between the restrictions of the formation pressure. The
pressure in the well can be controlled by restricting the flow of drilling fluid through a
valve at the entrance of the well, or by manipulating the flow from the annulus, by
manipulating a choke valve. In this work two model predictive control (MPC)
algorithms, a linear and a nonlinear, for bottom hole pressure control of an oil well
drilling system, by manipulating the choke valve and the mud pump, were presented as
an alternative way to improve the operational effectiveness of the managed pressure
drilling (MPD) technology.
This work aim a comparison between the two MPC algorithms and their
application and utilization on the pressure control of an oil well drilling process.
Keywords: MPC, MPD, oil well drilling, pressure control.

vi
Sumário
Agradecimentos ............................................................................................................................ iii
Resumo ..........................................................................................................................................iv
Abstract ......................................................................................................................................... v
Lista de Tabelas ........................................................................................................................... viii
Lista de Figuras ............................................................................................................................. ix
Capítulo 1 .................................................................................................................................... 11
1.1 – Perfuração de Poços de Petróleo .................................................................................... 11
1.2 – Controle da Pressão no Poço ...................................................................................... 15
1.2.1 - Gradiente de pressão ................................................................................................ 15
1.2.2 – Técnicas de perfuração para o controle da pressão ................................................. 17
1.2.2.1 – Perfuração sobre balanceada (OBD) .................................................................... 18
1.2.2.2 – Perfuração sub-balanceada (UBD) ....................................................................... 18
1.3 – Objetivos do Trabalho .................................................................................................... 21
1.4 - Motivação ....................................................................................................................... 21
1.5 – Revisão do Estado da Arte ............................................................................................. 25
1.6 – Escopo do Trabalho ........................................................................................................ 29
Capítulo 2 .................................................................................................................................... 31
2.1 – Breve Histórico .............................................................................................................. 31
2.2 – Definição ........................................................................................................................ 32
2.3 – Técnicas MPD ................................................................................................................ 32
Capítulo 3 .................................................................................................................................... 35
3.1 – Introdução ...................................................................................................................... 35
3.2 – Modelo de Nygaard ........................................................................................................ 36
3.3 – Modelo de Stamnes ........................................................................................................ 41
vii
3.3 – Escolha do Modelo ......................................................................................................... 45
3.4 – Simulação em MatLab/Simulink® - Análise em Malha Aberta .................................... 46
Capítulo 4 .................................................................................................................................... 54
4.1 – Introdução ...................................................................................................................... 54
4.2 – LMPC Convencional - O Controlador QDMC .............................................................. 57
4.3 – NMPC Convencional ..................................................................................................... 60
Capítulo 5 .................................................................................................................................... 64
5.1 – Introdução .......................................................................................................................... 64
5.1 – Controle LMPC do Processo de Perfuração ................................................................... 65
5.3 – Controle NMPC do Processo de Perfuração .................................................................. 69
5.4 – Discussão de Resultados ................................................................................................ 74
Capítulo 6 .................................................................................................................................... 76
6.1 – Conclusões ..................................................................................................................... 76
6.2 – Trabalho Futuros ............................................................................................................ 77
Apêndice A .................................................................................................................................. 84
viii
Lista de Tabelas
Tabela 1 - Parâmetros de simulação do modelo de Stamnes ...................................................... 46
Tabela 2 - Funções de transferência do modelo linear ................................................................ 65
Tabela 3 - Parâmetros de sintonia do controlador LMPC ........................................................... 65
Tabela 4 - Parâmetros de sintonia do controlador NMPC ........................................................... 70
ix
Lista de Figuras
Figura 1- Perfuração rotacional e caminho do fluido de perfuração ........................................... 12
Figura 2 - Sistema de circulação de lama .................................................................................... 13
Figura 3 - Perfil do gradiente de pressão de um poço ................................................................. 16
Figura 4 - Vazamento de óleo na plataforma Deepwater Horizon no Golfo do México. ........... 17
Figura 5 – Camada pré-sal .......................................................................................................... 22
Figura 6 - Localização do poço Tupi .......................................................................................... 23
Figura 7 - Esquema de uma estratégia MPD ............................................................................... 34
Figura 8 - Exemplo de uma sonda de perfuração ........................................................................ 35
Figura 9 - Balanço de massa no modelo de Nygaard .................................................................. 37
Figura 10 - Balanço de pressões no modelo de Nygaard ............................................................ 38
Figura 11 - Divisão do sistema proposto no modelo de Stamnes ............................................... 42
Figura 12 – Implementação do modelo de Stamnes em ambiente MatLab/Simulink® .............. 47
Figura 13 – Sequência de variações na abertura da válvula choke.............................................. 47
Figura 14 - Comportamento da pressão de fundo ( ) a variações na abertura da válvula
choke ........................................................................................................................................... 48
Figura 15 – Resposta dos estados a variações na abertura da válvula choke .............................. 49
Figura 16 – Variações na vazão da bomba de lama .................................................................... 49
Figura 17 - Comportamento da pressão de fundo a variações no fluxo da bomba de lama ........ 50
Figura 18 - Resposta dos estados a variações no fluxo de lama .................................................. 50
Figura 19 – Sequência de variações na vazão do influxo ............................................................ 51
Figura 20 - Comportamento da pressão de fundo a variações na vazão do influxo .................... 52
Figura 21 - Resposta dos estados a variações na vazão do influxo ............................................. 52
Figura 22 – Sequência de variações na vazão da bomba de pressão reversa .............................. 53
Figura 23 – Resposta da pressão de fundo à variações na vazão da bomba de pressão reversa.. 53
Figura 24 – Respostas dos estados a variações na vazão da bomba de pressão reversa ............. 53

x
Figura 25 - Esquema de implementação dos algoritmos MPC ................................................... 56
Figura 26 - Estrutura de um sistema de controle MPC ............................................................... 57
Figura 27 – Controle MPC da coluna de perfuração ................................................................... 64
Figura 28 – Resposta da pressão de fundo com LMPC a variações no setpoint ......................... 66
Figura 29 - Comportamento das variáveis manipuladas com LMPC a variações no setpoint .... 66
Figura 30 - Resposta da pressão de fundo com LMPC a variação na vazão de influxo do
reservatório .................................................................................................................................. 67
Figura 31 - Comportamento das variáveis manipuladas com LMPC a variação na vazão de
influxo do reservatório ................................................................................................................ 67
Figura 32 - Resposta da pressão de fundo com LMPC a variação na vazão da bomba de pressão
reversa ......................................................................................................................................... 68
Figura 33 - Comportamento das variáveis manipuladas com LMPC a variação na vazão da
bomba de pressão reversa ............................................................................................................ 68
Figura 34 - Resposta da pressão de fundo com LMPC a perda de controle da válvula choke .... 69
Figura 35 - Comportamento das variáveis manipuladas com LMPC a perda de controle da
válvula choke ............................................................................................................................... 69
Figura 36 - Resposta da pressão de fundo com NMPC a variações no setpoint ......................... 70
Figura 37 - Comportamento das variáveis manipuladas com NMPC a variações no setpoint .... 71
Figura 38 - Resposta da pressão de fundo com NMPC a variação na vazão de influxo do
reservatório .................................................................................................................................. 71
Figura 39 - Comportamento das variáveis manipuladas com NMPC a variação na vazão de
influxo do reservatório ................................................................................................................ 72
Figura 40 - Resposta da pressão de fundo com NMPC a variação na vazão da bomba de pressão
reversa ......................................................................................................................................... 72
Figura 41 - Comportamento das variáveis manipuladas com NMPC a variação na vazão da
bomba de pressão reversa ............................................................................................................ 73
Figura 42 - Resposta da pressão de fundo com NMPC a perda de controle da válvula choke .... 73
Figura 43 - Comportamento das variáveis manipuladas com NMPC a perda de controle da
válvula choke ............................................................................................................................... 74

11
Capítulo 1
Introdução
1.1 – Perfuração de Poços de Petróleo
Para satisfazer o aumento da demanda por petróleo e gás em escala mundial, há uma
necessidade em encontrar novas reservas e extraí-las. As reservas restantes são mais difíceis
de extrair já que as mais acessíveis já foram exploradas. Desafios relacionados a poços de
perfuração com margens de pressão estreitas exigem um controle de pressão preciso. Assim
há uma demanda por novas tecnologias de perfuração que forneçam um controle de pressão
adequado (Hydro, 2007).
A perfuração de um poço consiste em perfurar a crosta terrestre objetivando a extração
de recursos naturais tais como água, gás natural ou petróleo. Os primeiros poços foram
perfurados com o intuito de obter água diretamente de aquíferos, reserva de água subterrânea,
para suprir a necessidade de uma determinada localização. Porém com o desenvolvimento da
indústria e a urgência de obtenção de novas fontes de energia, as técnicas de perfuração até
então conhecidas foram aprimoradas permitindo a exploração do petróleo subterrâneo em
grande escala, tornando a indústria petrolífera um dos principais expoentes econômicos da
sociedade atual.
Existem basicamente dois métodos de perfuração (Rosenblatt, 2010):
Perfuração percussiva;
Perfuração rotacional.
A perfuração percussiva é a mais antiga das técnicas de perfuração de poços. Ela
consiste em golpear a rocha utilizando uma broca a fim de fragmentá-la através do seu
esmagamento. É um método lento e com um alcance limitado, sendo pouco utilizado
atualmente.

12
A perfuração rotacional consiste em realizar o esmerilhamento da rocha através do
movimento de rotação da broca. Um fluido é bombeado através da coluna de perfuração e
retorna pelo anular, espaço compreendido entre a coluna de perfuração e a parede do poço
conforme a Figura 1, levando consigo o cascalho gerado por esse processo. Esse método pode
ser considerado como o atual padrão da indústria.
Figura 1- Perfuração rotacional e caminho do fluido de perfuração
A eliminação dos cascalhos produzidos ao longo da perfuração fica a cargo do sistema
de circulação do fluido de perfuração, neste caso lama ou lodo de perfuração, representado na
Figura 2. Na sonda, encontra-se um reservatório de lama de perfuração que alimenta uma
bomba de lama, responsável por injetá-la na coluna de perfuração. A cabeça de injeção separa
os elementos rotativos dos estacionários, com isso, somente permite a rotação dos elementos
encontrados em sua parte inferior, como coluna de perfuração, broca etc. O elemento
responsável por transmitir o movimento rotacional à coluna de perfuração é o kelly.

13
Após a passagem do lama pela coluna de perfuração, e seu eventual retorno pelo anular
com os cascalhos provenientes do processo, esse lama volta ao reservatório, passando pela
linha de retorno e posteriormente por uma peneira vibratória com o intuito de separar os
sólidos mais grosseiros do lama de perfuração.
Figura 2 - Sistema de circulação de lama
O lama de perfuração tem várias funções:
1. Arrastar os fragmentos de rocha para a superfície;
2. Limpar e esfriar a broca;
3. Atuar como lubrificante onde houver atrito;
4. Exercer uma contrapressão de forma a evitar a entrada de fluidos no poço;
5. Evitar que os fragmentos de rocha se sedimentem no fundo nas paradas das
perfurações;
6. Obturar os orifícios das camadas porosas atravessadas na perfuração;

14
E as seguintes características:
1. Ser inerte em relação aos detritos;
2. Ser bombeável;
3. Proteger contra a corrosão e
4. Ser formada por materiais baratos e disponíveis.
A lama pode ser constituído a base de água ou a base de óleo. A água leva a vantagem
de ser mais disponível e refrigerar melhor e a desvantagem de encharcar tudo por onde passa,
desestabilizando a rocha. As lamas a base de óleo tem a principal desvantagem de serem
poluentes. Para dar propriedades pseudo-plásticas a lama, uma argila, por exemplo, bentonita,
é adicionada à água. Para dar mais densidade à lama e aumentar a contrapressão, um mineral
denso, por exemplo, barita, pode ser adicionada. Outras substâncias podem ser adicionadas
para adequar as camadas que vão sendo atravessadas.
Existem no mercado diversas técnicas de perfuração de poços de petróleo, porém duas
delas merecem destaque, a perfuração com pressão controlada (MPD- Managed Pressure
Drilling) e a perfuração sub-balanceada (UBD – Underbalanced Drilling). Ambas as técnicas
consistem em executar ações de controle com o intuito de manter a pressão a um determinado
nível. A UBD visa manter o valor da pressão introduzida no poço abaixo do valor da pressão
do fluido, ao longo de toda a formação rochosa. Já a MPD é utilizada para controlar
precisamente o perfil da pressão anular do poço, mantendo-a dentro de um determinado
gradiente, definido entre a pressão de fraturamento (limite superior) e a pressão dos poros
(limite inferior).
O enfoque desses dois métodos é distinto. A UBD foca na preservação do reservatório e
na aquisição de dados do mesmo já que esse método visa manter a pressão sub-balanceada. A
MPD visa o processo de perfuração, tendo como objetivo a eliminação de problemas como a
perda de circulação e entupimento do cano. Outra distinção desses dois métodos é com
relação ao equipamento utilizado. Para a UBD é necessário um equipamento no local para
lidar com os hidrocarbonetos ali produzidos, tornando esse método mais caro se comparado a
MPD. Além disso, algumas agências reguladoras não permitem a utilização da UBD em
operações offshore. Em termos de segurança, o método MPD pode ser considerado mais

15
seguro, pois qualquer incidente com o fluxo durante a operação pode ser seguramente contido
através do seu sistema de controle.
MPD é uma poderosa tecnologia emergente para controlar precisamente a pressão do
poço dentro de uma margem estreita de pressão. Ele conta com certo número de variáveis,
onde cada uma possui uma técnica diferente para controlar a pressão através da criação de um
sistema fechado de pressurização de lama. Enquanto MPD oferece capacidade de controlar a
pressão, ele cria uma complexidade operacional no sistema. Isso ocorre porque a MPD requer
diversas ferramentas (bombas, válvulas choke, válvulas em geral, etc.) que devem ser
coordenadas simultaneamente, uma tarefa onde operadores humanos podem não ser
particularmente eficientes. Uma solução para esse problema é o uso de ferramentas de
automação. Essas ferramentas podem confiavelmente integrar atividades relativas ao MPD
usando uma hierarquia multi-nível, permitindo aos operadores se concentrarem nas decisões
de mais alto-nível, enquanto deixam a execução das atividades de nível mais baixo para a
automação (Breyholtz et al., 2010a). A tecnologia MPD aposta no emprego da automatização
do processo, tornando o sistema mais seguro e melhorando seu desempenho, permitindo ao
operador o controle da situação como um todo dando a ele a possibilidade de definir ações e
objetivos daquela determinada atividade.
1.2 – Controle da Pressão no Poço
1.2.1 - Gradiente de pressão
Para entender as técnicas de perfuração com pressão controlada é preciso antes explicar
os valores e tipos de pressão que são utilizados para compor a janela de gradiente de pressão
que serve como parâmetro para manter os níveis de controle. À medida que o poço é
perfurado, o fluido de perfuração é circulado dentro dele para obter uma pressão de fundo de
poço específica. A densidade do fluido é determinada pelos gradientes da pressão de
formação e porosidade e pela estabilidade do poço (Martin, 2006).
Todas as formações penetradas pela broca de perfuração são porosas em algum grau. Os
espaços porosos podem conter fluidos como: petróleo, gás, água salgada ou uma mistura
deles. A pressão de porosidade é exercida pelos fluidos contidos nos espaços porosos (Skalle,

16
2009). Já a pressão de fraturamento é aquela onde o poço irá começar a apresentar avarias, ou
fraturar, sendo assim um ponto crucial na determinação da estabilidade do poço.
A Figura 3 mostra o comportamento do perfil de um gradiente de pressão de um
determinado poço relacionado à profundidade. O objetivo ao perfurar o poço é manter a
pressão de lama dentro dessa janela delimitada pela pressão de porosidade e a pressão de
fraturamento. É fundamental que essa janela seja mantida. Quando a pressão do fluido é
menor que a pressão de porosidade ocorre os chamados kicks. A denominação kick deriva do
fenômeno observado fora do poço, e quando ele acontece, o lama é lançado para fora dele.
Figura 3 - Perfil do gradiente de pressão de um poço
É necessária uma extrema cautela quando ocorrem os kicks, pois caso esses não sejam
controlados de maneira adequada podem levar a situações de blowout, pondo em risco a
segurança dos trabalhadores e, a depender do caso, podem inutilizar o reservatório. Além de
causar prejuízos financeiros e pessoais, esses acidentes podem vir a gerar um grave problema
ambiental como no caso do acidente ocorrido em 2010 na plataforma Deepwater Horizon,
localizada no Golfo do México que culminou na morte de 11 funcionários e um prejuízo
bilionário para a empresa detentora da plataforma, a BP (British Petroleum).
17
A Figura 4 mostra a extensão do acidente com a plataforma da BP. Com um vazamento
estimado em 205,8 milhões de galões de óleo desde o dia do acidente, em 20 de abril de 2010,
até o fechamento provisório do poço em 15 de Junho de 2010, essa tragédia deixou profundas
marcas no ecossistema e na economia local, uma vez que prejudicou a biodiversidade bem
como a atividade pesqueira e o turismo na região.
Figura 4 - Vazamento de óleo na plataforma Deepwater Horizon no Golfo do México.
1.2.2 – Técnicas de perfuração para o controle da pressão
Com as reservas atuais de petróleo se esgotando, é necessária a perfuração de poços
mais profundos e complexos. Alguns profissionais da indústria diriam que 70% das atuais
reservas offshore são economicamente imperfuráveis usando técnicas convencionais de
perfuração (Coker, 2004), técnicas estas conhecidas como perfuração sobre balanceada (OBD
- Overbalanced Drilling). Assim, novas técnicas de perfuração foram implementadas, as quais
tomam como base a pressão do poço, podendo ser colocada uma pressão menor ou uma
pressão igual ao gradiente de pressão do poço. A técnica para o primeiro caso é conhecida
como perfuração sub-balanceada (UBD) e, para o segundo caso, perfuração com pressão
controlada (MPD), (Shayegi, 2007).
Cada uma dessas técnicas em especial possui suas vantagens e desvantagens que devem
ser analisadas caso a caso, verificando o perfil do poço que será perfurado bem como os riscos

18
e valores intrínsecos a cada operação. O conhecimento da área a ser explorada bem como das
técnicas que possam ser utilizadas torna-se fundamental para o sucesso do processo de
perfuração e da produtividade do poço em questão.
1.2.2.1 – Perfuração sobre balanceada (OBD)
A prática de manter uma pressão no poço que exceda a pressão dos poros é chamada de
perfuração sobre balanceada (OBD). Esse foi o método adotado na perfuração da maioria dos
poços desde o início do século 20 (Elliot et al., 2011). Esse método possui alguns reveses, tais
como:
Danos excessivos à formação, podendo levar o poço a um eventual colapso;
Possuir gradiente de pressão relativamente pequeno, o que torna sua operação
mais delicada e minuciosa a fim de evitar erros que possam provocar problemas
no poço e àqueles que o operam, fazendo assim com que o processo de perfuração
mediante tal técnica seja menos seguro se comparado aos demais métodos;
Custo mais elevado, uma vez que para prevenir as perdas do fluido de perfuração
durante tal processo é necessária à utilização de diversos tubos de revestimento de
poços para manter a densidade de fluido necessária à contenção da pressão da
formação;
Possuir baixa taxa de penetração (ROP – Rate of Penetration), que é a velocidade
com a qual a broca perfura a formação. Uma ROP baixa significa uma maior
lentidão no processo de perfuração, fazendo com que o tempo que o poço passe
inativo seja maior que nos demais casos.
Por ser a técnica de perfuração mais antiga, é possível observar que a aplicabilidade da
OBD pode não mais suprir as necessidades do mercado atual que busca uma maior
produtividade, num menor tempo com custos menores e cujos riscos sejam pequenos. Em
resposta a essa tendência da indústria petrolífera, as duas técnicas a seguir foram
desenvolvidas objetivando suplantar essas brechas proporcionadas pelo OBD.
1.2.2.2 – Perfuração sub-balanceada (UBD)
19
Quando a pressão hidrostática de um fluido de perfuração é intencionalmente projetada
para ser menor que a pressão da formação a ser perfurada, essa operação será considerada
perfuração sub-balanceada (UBD). Essa pressão hidrostática do fluido de perfuração pode ser
naturalmente menor que a pressão da formação ou pode ser induzida. O estado induzido pode
ser criado a partir da injeção de gás natural, nitrogênio, ou ar à fase líquida do fluido (AEUB,
1994).
Existem algumas técnicas para modificar a pressão hidrostática do fluido de perfuração
durante a UBD, sendo os mais conhecidos os seguintes (Perfuração Underbalanced, 2012):
Dry air – Ou empoeiramento, como também é conhecida, consiste na utilização
de compressores de ar combinados com um booster (intensificadores que
aumentam a pressão do ar vindo do compressor, mas não altera o seu volume).
Além disso, uma pequena quantidade de fluido é injetada com o único objetivo de
diminuir a corrosão;
Mist – Uma pequena quantidade de agente espumante é adicionada ao fluxo de ar
dando origem a uma “neblina” que remove os cascalhos resultantes da perfuração
até a superfície;
Foam – Semelhante ao Mist, divergindo somente quanto à quantidade de agente
espumante adicionada, que é um pouco mais elevada, e quanto à consistência,
nesse caso formam-se bolhas e são elas que auxiliam na eliminação dos cascalhos;
Stable foam – Semelhante ao Mist e ao Foam, e com o mesmo objetivo, porém
agora uma grande quantidade de agente espumante é adicionada ao fluxo de ar, a
consistência agora é semelhante a uma espuma de barbear;
Gasified muds – Ar ou outro gás, como nitrogênio, é injetado à lama de
perfuração.
As principais vantagens desse método são a redução de danos à formação, redução na
perda de circulação e aumento no ROP. Quanto às desvantagens, a perfuração UBD é mais
cara se comparada a outros métodos já que é necessária uma estrutura maior e uma quantidade
de equipamentos maior para tornar esse processo realizável.
1.2.2.3 – Perfuração com pressão controlada (MPD)

20
Este item é tratado com maiores detalhes no capítulo 2.

21
1.3 – Objetivos do Trabalho
O objetivo principal deste trabalho é:
Estudo, implementação e avaliação mediante simulações computacionais de um
sistema de controle avançado, baseado em controle preditivo (MPC – Model Predictive
Control), para manipulação simultânea da bomba de lama de perfuração e válvula choke de
recirculação de lama, visando manter a pressão anular de fundo (BHP – Bottomhole Pressure)
no nível de operação desejado.
São objetivos secundários deste trabalho:
Propiciar um melhor entendimento do problema de perfuração e avaliar uma
determinada solução visando o pré-sal;
Aumentar a eficiência, desempenho e segurança nas operações de perfuração de
poços de petróleo;
Contribuir ao desenvolvimento de novas tecnologias de perfuração.
1.4 - Motivação
A camada pré-sal, Figura 5, compreende um conjunto de rochas que se encontra abaixo
da camada de sal. Sua formação ocorreu em períodos anteriores à quebra da Gondwana, o
supercontinente formado pelas Américas do Sul e África, há milhões de anos atrás. Após a
separação do supercontinente, devido aos movimentos das placas tectônicas, uma região
pantanosa se formou no fundo da fenda originaria dessa separação. Matéria orgânica se
misturou a partículas de calcário, argila e areia, dando origem a uma camada rochosa. Com a
continuidade das atividades tectônicas, água salgada passou a invadir essa região pantanosa,
porém ao evaporar deixava uma camada de sal. A continuidade desses depósitos de sal deu
então origem à conhecida camada de sal, composta principalmente por halita e anidrita (Como
foi formada a camada do Pré-sal, 2010).
As rochas que compõem os reservatórios da camada pré-sal são formadas por
carbonatos microbiais ou microbiolitos, colônia de cianobactérias mortas e calcificadas. Sua
complexidade vai além da baixa porosidade e da possibilidade de permeabilidade. Por ser

22
uma formação de ocorrência cujos precedentes são raros, pouco se sabe sobre a sua estrutura e
comportamento com relação à recuperação de óleo (Fraga, 2008).
Figura 5 – Camada pré-sal
Esses reservatórios da camada pré-sal podem ser encontrados ao longo da costa
brasileira numa área compreendida entre a região Nordeste e Sul, na costa Oeste africana bem
como no Golfo do México. O pré-sal recebeu esse nome por ser uma região cujo deposito de
materiais rochosos ocorreu de forma anterior à formação da camada de sal, dessa forma sua
profundidade pode chegar a superar os 7.000 metros com relação à superfície marítima.
A descoberta da camada pré-sal gerou uma especulação sobre a sua capacidade de
produção de petróleo. No Brasil diversos testes foram realizados, sendo o teste no poço agora
nomeado Tupi, cuja profundidade ultrapassou os 5.000 metros da superfície marítima, que
atestou positivamente os indícios de produção petrolífera dessa camada. Após isso, mais sete
poços foram perfurados e todos reafirmam a existência de petróleo nessa região (Entenda o
que é a Camada Pré-Sal, 2010).

23
A perfuração do poço Tupi foi somente o início das descobertas a cerca do pré-sal. Em
uma faixa compreendida entre os litorais de Espírito Santo e Santa Catarina, testes realizados
detectaram a presença de um grande volume de óleos leves e de alta qualidade, podendo vir a
produzir uma elevada quantidade de barris por dia, com expectativas de superação, em termos
de produção, dos poços da camada de sal hoje explorados na região (Entenda o que é a
Camada Pré-Sal, 2010).
Figura 6 - Localização do poço Tupi
Com a confirmação da existência de petróleo nessa região, ocorrem também as
problemáticas com relação à sua exploração. O desconhecimento do comportamento das
rochas dessa camada, as elevadas profundidades e consequentemente pressão e temperatura e
a distância com relação ao litoral, são exemplos de desafios que deverão ser vencidos para só
assim começar efetivamente a exploração do pré-sal (COPPE, 2009).
O principal custo para o pré-sal está na perfuração dos poços, a qual exige
equipamentos complexos, tais como sondas em alto mar, e a busca por novas soluções para os
diversos problemas da perfuração, visando aumentar a eficiência e reduzir o tempo e custo da
operação. A exemplo do poço Tupi, a distância entre esses poços e a costa brasileira pode
superar os 300 km, com isso, todo um aparato logístico de apoio em alto-mar deve ser
preparado para transportar funcionários, equipamentos, matérias etc. Além disso todo um
24
sistema de ancoragem e operação de poço deve ser idealizado para suprir a necessidade dessas
plataformas (COPPE, 2009).
Com relação à profundidade, por superar os 5.000 metros, ela exige uma maior cautela
com relação à perfuração desses poços e a extração dos óleos lá encontrados. Para atingir a
camada pré-sal será necessário ultrapassar 1 km de lâmina d’água, 2 km de sedimentos e mais
2 km da camada de sal, sendo que essa última possui um comportamento de difícil previsão já
que ela age como uma massa plástica impermeável, que volta a se fechar poucos instantes
após aberto o poço. Além disso, a presença do sal provoca distorções nas ondas sísmicas que
são emitidas na região com o intuito de averiguar a estrutura geológica em análise,
dificultando a obtenção de dados sobre as camadas adjacentes. Uma tecnologia de perfuração
e de revestimento de poços mais avançada do que as hoje utilizadas se faz necessária para só
assim evitar um colapso nas paredes do poço e amenizar os efeitos da plasticidade do sal
(COPPE, 2009).
Como a pressão e temperatura são características intimamente ligadas à profundidade,
quanto mais profundo for o poço, maior a pressão com que o óleo ou gás sairá dele e maior a
diferença de temperatura à qual essa produção será submetida. Dutos para escoá-la deverão
ser projetados para aguentar pressões de até 400 atm, cerca de 400 vezes maior que a pressão
no nível do mar, e uma gradiente de temperatura que pode variar entre 150° C e 4° C. Esse
choque térmico pode vir a causar entupimento dos dutos, ou risers, com a possível coagulação
do óleo, demandando assim a necessidade da inserção de um produto químico que seja capaz
de evitar que isso ocorra (COPPE, 2009).
A hostilidade do ambiente onde estão inseridas as rochas do pré-sal é outro ponto a ser
vencido. A presença abundante de gases corrosivos como o dióxido de carbono (CO2) e o
ácido sulfídrico (H2S) nessa região exigem a utilização de materiais capazes de suportar esses
efeitos por um longo tempo, dada a dificuldade de manutenção das peças aí localizadas. A
presença de grande quantidade de CO2 nos reservatórios prejudica também o escoamento.
Essa quantidade aumentada desse gás pode formar padrões de escoamento que aumentam a
perda de carga exigindo consequentemente um aumento na pressão para que esse fluido
continue a escoar normalmente pela tubulação. Com um aumento das perdas a produtividade
se reduz e há um aumento do custo de produção (COPPE, 2009).

25
A exploração da camada pré-sal vai exigir antes de tudo um investimento no setor de
pesquisa e tecnologia devido à inedicidade dessas operações, as adversidades encontradas no
local e de um conhecimento um tanto quanto escasso se comparada à exploração das demais
camadas. O início das atividades ligadas a essa região não será algo imediato, mas a
superação desses desafios é possível e estão fortemente ligados a um esforço coletivo e
multitarefa envolvendo diversos setores da sociedade acadêmica e desenvolvedora de
tecnologia (COPPE, 2009).
1.5 – Revisão do Estado da Arte
Baseada na dificuldade de perfurar novos poços, sendo que estes por ventura podem se
encontrar em ambientes hostis, e vista a necessidade de prover maior segurança para aqueles
envolvidos nesse processo, a perfuração de poços usando a técnica MPD vem sendo alvo de
inúmeros estudos e publicações na área, alguns dos quais são resumidamente apresentados a
seguir:
Martim (2006) observou que ao passo que a demanda por novos poços aumenta,
principalmente aqueles localizados em águas profundas, é necessário uma técnica
mais eficiente que reduza não só os custos do processo, em especial os
relacionados ao valor excessivo da lama de perfuração, como também mitigue
alguns problemas tais como entupimento nos dutos, perdas de circulação, etc. A
introdução da MPD, possibilita a solução desses problemas, tornando
economicamente viável perfurar poços onde anteriormente não seriam possíveis.
Nygaard et al. (2006) apresentaram um esquema de controle proporcional-
integrativo (PI) e controle preditivo não linear (NMPC) para estabilizar a BHP
(Bottomhole Pressure – Pressão de fundo) durante o processo de perfuração de
poços de petróleo. Os parâmetros do controlador PI foram estimados através do
método de Ziegler-Nichols em malha fechada. Resultados de simulações
numéricas evidenciaram que o esquema de controle manual apresentou
desempenho inferior aos esquemas de controle PI e NMPC. No entanto, no
esquema de controle PI, foi necessário re-estimar os parâmetros do controlador
quando as condições de operação se afastavam das condições originais de projeto.

26
Stamnes (2007) manifesta que o controle da pressão durante o processo de
perfuração é de extrema importância para prevenir influxo no reservatório, o que
poderia levar a um blowout e consequentemente a uma tragédia ambiental e
econômica, e resultar também na perda de vidas humanas. Além disso, controlar a
pressão na perfuração pode evitar danos à parede do reservatório e eventuais
colapsos na sonda. Com isso ele desenvolveu um observador adaptativo que pode
ser utilizado em controladores que por ventura viessem a ser desenvolvidos para
tal finalidade.
Para compensar a falta de medições contínuas da BHP durante as operações de
perfuração, Breyholtz (2008) apresenta um observador adaptativo capaz de inferir
a BHP e o coeficiente de fricção no poço. O observador é então usado no
desenvolvimento de um NMPC para manter pressão dentro de limites pré-
estabelecidos. O desempenho do observador e do NMPC são testados por
simulações usando um pacote comercial, com resultados muito promissores.
Zhou et al. (2008) apresentam um esquema de controle baseado em um
observador não-linear para estabilizar e seguir assintoticamente o perfil da BHP,
manipulando a válvula choke e a bomba de pressão reversa. Um modelo dinâmico
simples, que captura o fenômeno dominante do processo de perfuração, é usado
na implementação do observador e do controlador. O observador é desenvolvido
usando técnicas de Lyapunov, para estimar o estado não-medido. Simulações
apresentadas ilustram a efetividade do esquema de controle proposto.
Stamnes et al. (2008) desenvolvem um observador de ordem reduzida para
estimar o coeficiente de fricção, densidade e BHP de um poço durante a
perfuração. O projeto se baseia no uso de um modelo não-linear de 3ª ordem de
um sistema MPD e de uma abordagem via Lyapunov. Aplicação do observador a
dados provenientes de um poço de petróleo no Mar do Norte mostra que a pressão
estimada converge à pressão verdadeira sob condições razoáveis de operação.
Li et al. (2009) propõem um esquema controlador-estimador integrado para
controlar a BHP de um sistema de perfuração. Um estimador adaptativo rápido é
aplicado para estimar os estados não-medidos, os quais são usados no controlador
adaptativo que se adapta a perturbações e parâmetros variantes no tempo do
sistema. Simulações numéricas mostram que o controlador tem desempenho
garantido, verificando os resultados teóricos.

27
Breyholtz et al. (2009) avaliam a aplicação de um NMPC, baseado em um modelo
de ordem reduzida, na coordenação da abertura da válvula choke e das vazões da
bomba principal de lama e da bomba de pressão reversa no controle da BHP. O
desempenho do NMPC é comparado com o desempenho de um controlador PI,
sendo o desenvolvimento de ambos os sistemas de controle combinado com um
observador da pressão de fundo. Os controladores são avaliados por simulações
numéricas usando um modelo de alta fidelidade com dados de um processo de
perfuração offshore no Mar do Norte. Resultados das simulações mostram que o
NMPC melhora o controle da BHP e simplifica de forma significativa os
procedimentos para a equipe de perfuração.
Breyholtz et al. (2010a) introduzem o conceito de controle multi-camadas nas
operações MPD. O controle hierárquico é composto de três diferentes camadas:
um nível inferior de malhas independentes de controle regulatório; um nível
intermediário de controle supervisório baseado em MPC, que coordena os
diferentes controladores de malha, otimizando-os; e finalmente um nível superior
de otimização que tenta encontrar metas operacionais enquanto maximiza os
aspectos econômicos da operação. Resultados das simulações mostraram que o
controle proposto foi capaz de manter a BHP no valor desejado com pequenos
desvios durante períodos transitórios.
Breyholtz et al. (2010b) usam um MPC para controlar a BHP e a posição do
gancho de sustentação da coluna de perfuração, para evitar a ocorrência de
deslizes da coluna, manipulando a bomba de lama, a bomba submarina e a
velocidade da broca em um sistema de perfuração com gradiente dual, uma
variante MPD. Simulações realizadas em um modelo de alta fidelidade atestaram
a habilidade do controlador em manter as variáveis do processo dentro das suas
restrições operacionais, comprovando o MPC como a escolha natural para esses
tipos de sistemas.
Carvalho Neto (2010) propôs um MPC baseado em múltiplos modelos lineares
para controlar a BHP pela manipulação da válvula choke. O MPC multi-modelos
é desenvolvido em dois estágios. No estágio off-line, modelos lineares
identificados em determinados pontos de operação são usados para construir um
banco de controladores MPC sem restrições. No estágio on-line, resolve-se um
problema de otimização com restrições, combinando os controladores obtidos no

28
primeiro estágio. Simulações realizadas mostraram a efetividade e maior
desempenho do MPC proposto quando comparado ao desempenho de um MPC
convencional baseado num único modelo.
Zhou et al. (2010) desenvolveram um sistema de controle chaveado para
regulação da BHP, manipulando a válvula choke e a bomba de pressão reversa.
Um modelo matemático simples, que descreve os fenômenos dominantes do
sistema de perfuração, forma a base para o projeto do observador e do
controlador. Propriedades de estabilidade assintótica são estabelecidas e a
atenuação de kick é garantida, para um conjunto de modelos de poços, incluindo
os mais comuns. Simulações efetuadas com um simulador de alta fidelidade
mostraram a efetividade do esquema de controle proposto.
Helgestad (2010) desenvolve um modelo simplificado em estado estacionário de
um processo de perfuração o qual é usado para otimizar o processo. O objetivo da
otimização é a minimização do custo total da perfuração, incluindo as operações
ativas e não-ativas (tempo para realizar as conexões dos tubos, viagens de
perfuração etc) do processo. A razão para a separação nos modos operação do
processo é a diferença de objetivos de controle. Variáveis controladas foram
identificadas, do ponto de vista de controle auto-otimizante, para atingir a perda
mínima quando o processo está sujeito a perturbações esperadas. Finalmente, um
modelo dinâmico simplificado foi usado para simular o desempenho de uma
estrutura de controle, baseada em controladores PI, implementada para controlar a
BHP pela manipulação da bomba de pressão reversa e a válvula choke. A
estrutura de controle foi capaz cumprir os objetivos estabelecidos, mantendo a
BHP dentro de uma janela de pressão de bar.
Bellumat et al. (2011) fazem um estudo de controlabilidade de um processo de
perfuração, visando obter o melhor emparelhamento entrada/saída para o
desenvolvimento de controladores PI multi-malha. As saídas consideradas são a
BHP e a ROP, tendo como entradas manipuladas a abertura da válvula choke, a
vazão da bomba de lama, a rotação da coluna e o peso sobre a broca. O estudo
conclui que a BHP é controlada de forma mais eficiente através da manipulação
da abertura da válvula choke do que empregando a vazão da bomba de lama.
Além disso, a rotação da coluna e o peso sobre a broca apresentam a mesma
eficiência no controle da ROP.

29
Kaasa et al. (2011) propuseram um modelo simplificado, baseado na dinâmica de
fluidos, que captura as características hidráulicas dominantes de um sistema MPD.
Aplicando algoritmos de estimação de parâmetros on-line, o modelo é calibrado
automaticamente, usando medições de variáveis existentes, para alcançar um nível
de precisão adequado, comparável a um modelo mais rigoroso. Resultados são
demonstrados usando dados reais de um sistema MPD em operação no Mar do
Norte.
1.6 – Escopo do Trabalho
O corpo do presente trabalho de conclusão de curso está estruturado da seguinte forma:
Capítulo 1 – Introdução. Este capítulo apresenta uma breve explanação sobre o
processo de perfuração de poços de petróleo, as principais técnicas aplicadas, bem
como os objetivos do trabalho, a motivação para o desenvolvimento do mesmo e
uma revisão bibliográfica de trabalhos correlatos publicados na literatura.
Capítulo 2 – Perfuração com Pressão Controlada (MPD). Neste capítulo
aborda-se com maiores detalhes a técnica de perfuração com pressão controlada,
técnica que vem sendo atualmente amplamente adotada nos processos de
perfuração de poços de petróleo.
Capítulo 3 – Modelagem do Processo de Perfuração. Este capítulo apresenta
dois modelos de ordem reduzida, amplamente divulgados na literatura, que tratam
de descrever o processo de perfuração. Discute-se a escolha do modelo a ser
utilizado neste trabalho para representar o processo, assim como uma análise da
resposta dinâmica do mesmo a perturbações nas condições de operação nominal.
Capítulo 4 – Teoria de Controle Preditivo (MPC). Este capítulo trata da teoria
básica dos controladores MPC convencionais, linear (LMPC) e não-linear
(NMPC), que serão usados no desenvolvimento do sistema de controle avançado
proposto neste trabalho.
Capítulo 5 – Controle Preditivo do Processo de Perfuração. Neste capítulo são
mostrados os resultados das aplicações dos controladores LMPC e NMPC. Os
desempenhos destes controladores são discutidos e comparados, quando
submetidos a diversas condições de operação.

30
Capítulo 6 – Conclusões e Recomendações. Aqui são apresentadas as conclusões
gerais do trabalho assim como algumas propostas para dar continuidade ao projeto.

31
Capítulo 2
Perfuração com Pressão Controlada
(MPD)
2.1 – Breve Histórico
Os conceitos das diversas técnicas que compõem a MPD não são exatamente novos.
Ideias iniciais surgiram no século XV, com os esboços de Leonardo da Vinci, e foram
efetivadas recentemente em 2003. O MPD é resultado da observação e evolução do processo
de perfuração partindo dos métodos tradicionais de perfuração OBD e alcançando outro
patamar na tentativa de otimizar a UBD (Tercan, 2010).
Os dispositivos RCD foram mostrados pela primeira vez em 1937 no catálogo da
Shaffer Tool Company. Essas ferramentas permitiram dar início a perfuração com fluidos
compressíveis tais como gás, ar, névoa e espuma, processo que ficou conhecido com
performance drilling (PD). Essa técnica viabilizou uma melhora nos índices de penetração,
uma maior durabilidade das brocas e permitiu a redução de custos na indústria da perfuração
(Tercan, 2010).
Algumas idéias MPD foram formalmente apresentadas nos anais do Abnormal Pressure
Symposium, realizados na Universidade do Estado da Louisiana entre os anos 1967 e 1972.
Esses simpósios visavam discutir e avaliar técnicas parar prever as pressões no fundo do poço
e gradiente de fraturamento a partir de dados disponíveis. Em 1970, houve a primeira real
tentativa de realizar uma perfuração controlada. Uma empresa de petróleo perfurou kick to
kick de forma a evitar perdas com o retorno e aumentar a taxa de perfuração, essa tentativa
ocorreu em um poço offshore no Golfo do México (Tercan, 2010).
Com o passar do tempo, o uso dos RCD’s foi aprimorado e com isso houve a
possibilidade de manipular de forma precisa o perfil da pressão hidráulica do anular. Assim,
em 2003, foi finalmente reconhecida a técnica MPD. Desde 2005, a técnica vem sendo

32
amplamente aplicada o que ocasionou o aumento de sua popularidade tanto na indústria como
na academia (Tercan, 2010).
2.2 – Definição
Segundo a IADC (International Association of Drilling Contactors), MPD é um
processo de perfuração adaptativo usado para controlar de maneira mais precisa o perfil da
pressão anular em todo o poço. Os objetivos são verificar a os limites da pressão de fundo do
ambiente e manipular o perfil da pressão hidráulica de acordo com esses limites. Isso pode
incluir o controle da pressão de retorno usando um sistema de circulação de lama fechado e
pressurizado, bomba de fundo ou qualquer outro equipamento mecânico. A MPD geralmente
evitará o fluxo para dentro do poço (Rehm et al., 2008).
A MPD pode ser adaptativa às condições propostas pelo poço. Para isso, esse método
utiliza um fluido de perfuração monofásico com o intuito de minimizar as perdas causadas
pelo atrito durante o escoamento (Rehm et al., 2008) Além disso, a técnica MPD apresenta
uma redução significativa no tempo não produtivo (NPT), o que é uma característica bastante
apreciada na indústria petrolífera, pois dessa forma pode vir a minimizar os gastos e elevar os
ganhos.
2.3 – Técnicas MPD
As principais técnicas MPD são (Rehm et al., 2008):
Pressão de fundo constante (CBHP – Constant Bottomhole Pressure) – Onde as
ações de controle são tomadas para corrigir ou reduzir o efeito da perda causada
pelo atrito durante a circulação de lama, de forma a manter a pressão dentro dos
limites impostos pela pressão de porosidade e pressão de fraturamento.
Perfuração com camada de lama pressurizada (PMCD – Pressurized Mud-cap
Drilling) – É uma técnica de perfuração sem retornos (perfuração sem riser) à
superfície e com uma coluna de fluido no anular mantida cheia, com o fluido de
perfuração juntamente com os cascalhos produzidos pelo processo, sobre a
formação, A coluna de fluido no anular requer uma pressão de superfície

33
observável para equilibrar a pressão de fundo. Essa técnica é segura com o total
retorno das perdas geradas pela perfuração. Além disso, é uma técnica viável em
áreas onde outras maneiras de perfuração que preveem as perdas não são
aplicáveis ou são mais caras. Ela pode usar água como fluido durante a
perfuração.
Gradiente dual (DG – Dual Gradiente) – Termo utilizado para as mais variadas
tentativas de controlar a pressão anular de topo através do manuseio da densidade
de circulação equivalente (ECD – Equivalente Circulating Density), em operações
de perfuração em águas profundas.
No tocante ao nível de planejamento e otimização, decisões são tomadas visando obter
valores para as variáveis como trajetória de perfuração, peso na broca, RPM da haste de
perfuração e modo de perfuração. No nível de controle, variáveis como pressão, taxa de
escoamento, densidade e viscosidade do lama são continuamente usados para fazer ajustes ou
manipular variáveis como a taxa de escoamento da bomba, válvulas choke, velocidade da
haste de perfuração entre outras baseadas em otimização em tempo real. O objetivo dessas
ações é maximizar a ROP juntamente com objetivos adicionais tais como minimizar o
desgaste da broca de perfuração, diminuir a necessidade da utilização de químicos e aditivos,
etc. Da mesma forma, otimização em tempo real assegura que um número explícito de
restrições seja satisfeito, sendo a mais crítica dessas restrições os limites de pressão
(Breyholtz et al, 2010a).
A Figura 7 representa um sistema MPD. Este sistema utiliza um dispositivo de controle
de rotação (RCD – Rotating Control Device) para selar o anular, uma válvula choke e uma
bomba de pressão reversa. A aplicação desse hardware permite ao operador controlar mais
precisamente o perfil de pressão no poço. Porém ao inserir uma instrumentação adicional
juntamente com esse hardware, o sistema torna-se mais complexo, o que dificulta ao operador
manter o processo controlado. A implementação de um sistema de controle utilizando a
válvula choke vem sendo discutida em diversos artigos (Zhou, 2008; Zhou, 2009; Zhou, 2010;
Nygaard et al. 2007a, 2007b; Kaasa et al, 2011; Stamnes et al, 2008; Breyholtz et al, 2009;
Breyholtz et al, 2010; Helgestad, 2010; Erdem, 2010; Li et al, 2009). Sua aplicação auxilia o
operador, tornando mais viável sua tarefa. A aplicação desse sistema já foi testada com

34
sucesso em algumas perfurações offshore, o que representa um avanço no controle da pressão
durante a perfuração de poços.
Figura 7 - Esquema de uma estratégia MPD
Integrar toda essa variedade de informações obtidas do sistema requer uma definição
dos níveis de abstração de cada dado obtido. Para tanto, é necessária uma definição do nível
hierárquico de cada tarefa para só assim ter uma melhor visão do processo como um todo
para, com isso, ver como a informação irá ser processado com o intuito de melhorar o
desempenho do controle. Quanto mais complexo o sistema a ser controlado, mais níveis
hierárquicos ele possui (Breyholtz et al., 2010a).

35
Capítulo 3
Modelagem do Processo de Perfuração
3.1 – Introdução
A Figura 8 ilustra o exemplo de uma sonda marítima de perfuração de um poço de
petróleo. A coluna de perfuração é presa ao top drive, um motor responsável pela rotação da
coluna, que se situa na parte superior do mastro ou derrick. A essa coluna é permitida também
uma movimentação vertical uma vez que o top drive encontra-se preso a um ganho,
permitindo que a coluna se movimente tanto para cima quanto para baixo, conforme for
necessário para penetrar a formação rochosa. Depois de aproximadamente 27 metros uma
nova seção de encanamento da coluna é conectada ao topo coluna anterior e com isso a
perfuração é retomada. Este procedimento é conhecido como conexão de tubo. Para uma taxa
regular de perfuração de 15m/h uma conexão de tubo é feita a cada duas horas (Stamnes,
2007).
Figura 8 - Exemplo de uma sonda de perfuração

36
Durante o processo de perfuração, um componente conhecido como lama de perfuração
é injetado na coluna de perfuração. A função do lama é unicamente transportar os detritos
resultantes da perfuração. Ela também é responsável pelo controle da pressão durante a
perfuração de um poço. Em técnicas convencionais o anular não é selado, isso torna o
processo menos complexo e mais barato. Porém um sistema selado e contando com uma
válvula de estrangulamento, ou válvula choke, e uma bomba de pressão reversa permite um
melhor controle de sua pressão.
O principal motivo para o controle da pressão é prevenir o kick (influxo incontrolável do
reservatório), que no pior dos casos pode causar o blowout de superfície, que em geral causa
grandes perdas financeiras, danos ao meio ambiente e possíveis perdas de vidas humanas. O
controle da pressão também é importante para prevenir o colapso do poço ou o seu
fraturamento, como também para reduzir o dano à superfície das paredes do poço. Danos à
parede do poço são causados quando o lama penetra ou entope as partes porosas do
reservatório, o que diminui a produção em estágios posteriores (Stamnes, 2007).
Na literatura existem diversos modelos matemáticos que tratam de reproduzir a
dinâmica do processo de perfuração, alguns deles rigorosos e outros mais simplificados.
Dentre destes últimos dois modelos se sobressaem, o modelo de Nygaard et al. (2006) e o
modelo de Stamnes (2007), os quais serão apresentados a seguir.
3.2 – Modelo de Nygaard
No trabalho de Nygaard et al. (2006) foram propostos dois modelos, um modelo de
ordem reduzida e outro modelo que contém um maior detalhamento dos fenômenos que
podem ocorrer no poço durante o processo de perfuração. O modelo de ordem reduzida foi
desenvolvido a partir da observação do comportamento de um fluido bifásico (líquido + gás)
de perfuração no que diz respeito à pressão de fundo.
A Figura 9 apresenta o esquema de balanço de massa de um processo de perfuração,
dividido em dois sistemas: coluna de perfuração e anular. Seguindo esta divisão, o balanço de
massa na coluna de perfuração (denotado pelo sub-índice ) é dado por:

37
Figura 9 - Balanço de massa no modelo de Nygaard
(1)
(2)
(3)
(4)
Sendo um índice, que quando substituído por faz referência à parte gasosa do
sistema e à parte líquida, os parâmetros da equação ficam da seguinte forma:
é o fluxo de massa na bomba;
é o fluxo de massa na broca de perfuração;
é a massa na coluna de perfuração.
O balanço de massa no anular (denotado pelo sub-índice ) é dado por:
(5)
(6)
(7)
(8)
onde:

38
é o fluxo de massa no reservatório;
é o fluxo de massa na saída da válvula choke;
é a massa no anular.
Além disso, é importante inserir no sistema a influência da pressão de fricção
introduzida pela velocidade do líquido. Quando gás é injetado no poço, o volume de gás se
altera da mesma forma que muda a pressão hidrostática devido à variação da densidade da
mistura. Portanto, as pressões que atuam sobre o sistema estão representadas e divididas
conforme Figura 10. Esse balanço é avaliado em dois pontos distintos, de onde são obtidas as
acelerações de massa no final da broca e no topo do anular.
Figura 10 - Balanço de pressões no modelo de Nygaard
A variação na taxa do fluxo de massa da mistura gás-líquido na coluna de perfuração
( é dependente das pressões de compressão da própria coluna ( ) e do anular
( ), da pressão hidrostática da coluna ( ) e do anular ( ), das perdas causadas pela
fricção da coluna de perfuração ( ) e do anular ( ). Assim, temos a Equação (9), sendo
que é a área seccional da coluna de perfuração.
(9)
39
(10)
Adotando como a área seccional do anular, a variação do fluxo de massa da mistura
gás-líquido na válvula choke é dada por:
(11)
(12)
Outro fator que influencia na pressão de fundo é a profundidade do poço. À medida que
essa profundidade vai se tornando cada vez maior, ocorre um acréscimo na taxa de perfuração
. Sendo assim, a profundidade, representada por , é considerada também um estado do
sistema dinâmico proposto por Nygaard et al. (2006), da forma:
(13)
(14)
Organizando as equações de balanço de massa, e definindo as entradas e saída do
sistema, o modelo de ordem reduzida pode ser descrito da seguinte forma:
(15)
(16)
(17)
Sendo o vetor contendo os sete estados de entrada do modelo, a saída, onde
representa a pressão anular de fundo (BHP), que é a variável que deverá ser controlada, e é
o vetor contendo a variável manipulada , que corresponde ao parâmetro de abertura da
válvula choke.
Quando um poço de petróleo é modelado usando a coluna de perfuração e o anular
como dois compartimentos, é assumido que o gás está uniformemente disperso no líquido.
(Nygaard et al., 2006). Assim, a densidade da mistura gás-líquido em cada parte do poço
é dada pela seguinte relação:

40
(18)
Sendo que é a massa de gás, é a massa de líquido e é o volume total no
compartimento analisado.
A porosidade do líquido na mistura ( é usada para calcular a taxa de massa do gás e
do líquido, e é dada por:
(19)
Se a velocidade é reduzida, as perdas devido à pressão de fricção são reduzidas e o gás
se expande, o que causa a fuga do líquido para fora do poço e leva o gás a ficar contido na
parte de dentro. Com isso, a taxa da massa de gás deve ser modificada para misturas com
baixa velocidade e nesse caso é dada por:
(
) (20)
Os cálculos do fluxo de massa da parte gasosa e líquida na broca e na válvula choke são
obtidos a partir do fluxo de massa da mistura e utilizando a Equação (20). Assim, os fluxos de
massa ficam da seguinte maneira:
(21)
(22)
(23)
(24)
A pressão de fundo é dada:
(25)
Sendo o fator de compressão do líquido, a densidade do gás, a constante do gás,
a massa molecular do gás, a temperatura média, a pressão atmosférica, a

41
gravidade, a profundidade do poço, o fator de fricção que ocorre entre o líquido e a parede
do poço e a velocidade da mistura, os termos que compõe a Equação (25) estão
representadas pelas equações:
(
) (26)
(27)
(28)
(
)
(29)
(
)
(30)
Os valores de e são obtidos da Equação (18), é o coeficiente de
descarga da restrição, que é a relação da taxa de fluxo de massa no final da tubulação, e é a
área de restrição, que no caso da válvula choke representa a sua abertura.
3.3 – Modelo de Stamnes
Esse modelo foi originalmente proposto por Kaasa (2007) e posteriormente
desenvolvido por Stamnes (2007). Nele é considerado um fluido de perfuração monofásico e
o poço dividido em dois compartimentos distintos, de maneira semelhante à proposta de
Nygaard et al. (2006). A Figura 11 mostra a divisão do sistema nas duas regiões, isto é a
coluna de perfuração e o anular, sendo estas conectadas pela broca de perfuração.

42
Figura 11 - Divisão do sistema proposto no modelo de Stamnes
Neste sistema, uma bomba de lama bombeia a lama de perfuração para dentro da coluna
de perfuração. Em condições normais o lama flui da bomba para a coluna de perfuração, para
a broca, e depois o anular e sai pela válvula choke. Depois da válvula choke, a lama é
reciclada e retorna ao seu reservatório. O propósito da circulação da lama de perfuração é
limpar os cascalhos e ajudar a manter o perfil de pressão correto no poço. O maior
componente é o peso hidrostático da lama, seguido da pressão da choke e por último a pressão
devido à fricção (Brill & Mukhrtjee, 1999). A Equação (31) mostra a equação em estado
estacionário para a pressão na broca de perfuração ( e seus principais componentes.
| | (31)
Sendo a densidade da lama de perfuração, a gravidade, a profundidade, a
pressão na válvula choke, o fator de fricção e o volume do fluido no anular, pode-se
perceber que modificando qualquer um desses parâmetros é possível modificar a pressão na
broca de perfuração. Porém, variar a densidade leva um tempo considerável para obter
uma resposta, pois essa alteração tem que atingir todo a lama para causar algum efeito e isso
43
demanda tempo. As formas mais rápidas de conseguir uma variação na pressão da broca são
alterando a pressão na válvula choke ( ou modificando o volume de fluido no anular ( ).
Para produzir uma alteração na pressão na choke basta modificar a sua abertura, e para
modificar o volume do fluido no anular é só alterar o fluxo na bomba de lama. Caso a choke
esteja completamente fechada, é possível modificar essa pressão controlando a bomba de
pressão reversa.
Aplicando o princípio do balanço de massa, o sistema mostrado na Figura 11 pode ser
descrito pelo seguinte conjunto de equações:
(32)
(33)
(34)
onde é a pressão na bomba de lama, é o fluxo através da broca de perfuração, é
o fluxo através da bomba de lama, é o fluxo na bomba de pressão reversa, é o
fluxo na válvula choke, é o influxo do reservatório (uma perturbação que pode ocorrer no
sistema). Os demais fatores são:
: Volume na coluna de perfuração;
: Volume no anular;
: Módulo de elasticidade da coluna de perfuração;
: Módulo de elasticidade do anular;
: Massa da coluna de perfuração;
: Massa do anular;
: Fator de fricção da coluna de perfuração;
: Fator de fricção do anular;
: densidade do anular.
e tem os seus valores obtidos por meio das Equações (35) e (36):

44
∫
(35)
∫
(36)
sendo a densidade média no anular, é o comprimento do anular, é a área seccional
do anular, é a densidade média na coluna, é o comprimento total da coluna de
perfuração e é a área seccional da coluna de perfuração.
O fluxo na válvula choke ( é dependente de sua abertura ( ) e de sua pressão
( ). Com isso, o fluxo é dado por:
√
(37)
onde é a constante de fluxo da válvula e é a pressão de saída na válvula, sendo a
abertura da válvula normalizada, i.e. .
Os fluxos na bomba de lama e na bomba de pressão reversa são dados pelas seguintes
relações:
(38)
(39)
Ambos os fluxos são dependentes da velocidade rotacional da bomba ( para a bomba
de lama e para a bomba de pressão reversa), do número de pistão de cada bomba ( e )
e do volume do golpe por pistão ( e ).
Assumindo as relações:

45
e substituindo as Equações (37), (38) e (39) nas Equações (32), (33) e (34), o modelo pode ser
descrito por:
(40)
( ) | |
| | (41)
(42)
Sendo a entrada de controle dada por:
(43)
As constantes são
;
;
;
; ;
;
; √
, , e .
A saída do modelo, que nesse caso corresponde à pressão da broca de perfuração que é
equivalente a pressão de fundo (BHP), pode ser representada por:
(
) | | (
) (44)
3.3 – Escolha do Modelo
Na avaliação dos modelos apresentados, foi observado que o modelo de Nygaard
apresenta um problema quando posto em prática o conceito de MPD. Ele é válido para um
fluido de perfuração bifásico, e com isso sua aplicabilidade melhor se adéqua ao enunciado de
UBD, onde gás é injetado ao líquido para mudar a densidade do fluido e em geral fazer com
que a pressão de fundo seja inferior à pressão da estrutura. Por isso o modelo de Stamnes, que
considera um fluido de perfuração monofásico, foi adotado no presente trabalho como a
principal ferramenta de suporte à simulação do processo de perfuração e aplicação de técnicas
MPD.

46
3.4 – Simulação em MatLab/Simulink® - Análise em Malha Aberta
Usando as Equações (40), (41), (42) e (44) e os valores dos parâmetros listados na
Tabela 1, foi possível desenvolver um simulador em ambiente MatLab/Simulink®, cujo
layout é apresentado na Figura 12. Este simulador tem como entradas o fluxo da bomba de
lama ( ) e o percentual de abertura da válvula choke ( ), e como saída a pressão da
broca ( ), que equivale à pressão anular de fundo (BHP). Além disso, é possível observar
os estados como a pressão da bomba de entrada ( ), o fluxo na broca ( ) e a pressão da
válvula choke ( ).
Tabela 1 - Parâmetros de simulação do modelo de Stamnes
Parâmetro Valor Unidade
m
-

47
Figura 12 – Implementação do modelo de Stamnes em ambiente MatLab/Simulink®
Para analisar a resposta dinâmica do processo, primeiro foi mantida constante a variável
correspondente à vazão de lama ( ) no valor de , já a variável correspondente
ao percentual de abertura da válvula choke ( ), sendo 0% totalmente fechada e 100%
totalmente aberta, e tendo como ponto de partida da simulação uma abertura de 20%, teve
esse valor variado em conforme mostrado na Figura 13.
Figura 13 – Sequência de variações na abertura da válvula choke
48
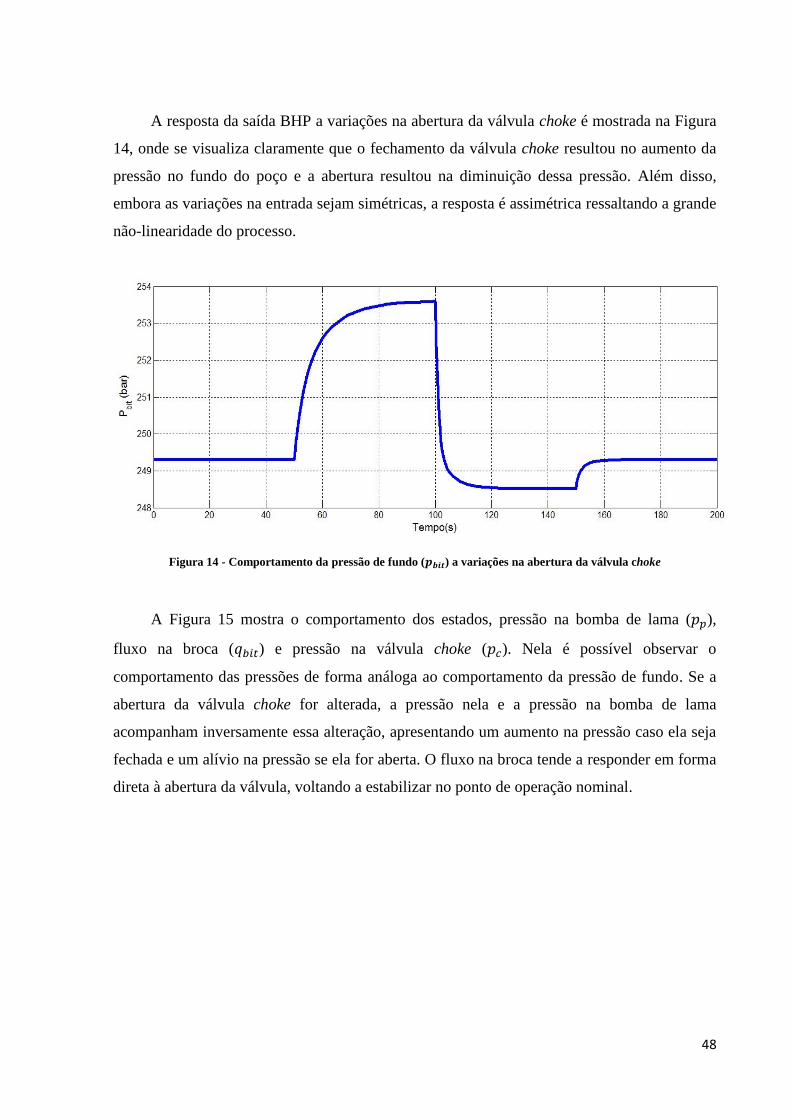
A resposta da saída BHP a variações na abertura da válvula choke é mostrada na Figura
14, onde se visualiza claramente que o fechamento da válvula choke resultou no aumento da
pressão no fundo do poço e a abertura resultou na diminuição dessa pressão. Além disso,
embora as variações na entrada sejam simétricas, a resposta é assimétrica ressaltando a grande
não-linearidade do processo.
Figura 14 - Comportamento da pressão de fundo ( ) a variações na abertura da válvula choke
A Figura 15 mostra o comportamento dos estados, pressão na bomba de lama ( ),
fluxo na broca ( ) e pressão na válvula choke ( ). Nela é possível observar o
comportamento das pressões de forma análoga ao comportamento da pressão de fundo. Se a
abertura da válvula choke for alterada, a pressão nela e a pressão na bomba de lama
acompanham inversamente essa alteração, apresentando um aumento na pressão caso ela seja
fechada e um alívio na pressão se ela for aberta. O fluxo na broca tende a responder em forma
direta à abertura da válvula, voltando a estabilizar no ponto de operação nominal.

49
Figura 15 – Resposta dos estados a variações na abertura da válvula choke
Noutro caso, a abertura da válvula choke é mantida constante em 20% e o fluxo na
bomba de lama ( ) é modificado. Essa variável de entrada é inicializada no valor de
e com o tempo sofre alterações em conforme mostrado na Figura 16.
Figura 16 – Variações na vazão da bomba de lama
A Figura 17 mostra o perfil de resposta da pressão de fundo. Nela é possível visualizar
que a pressão varia de maneira diretamente proporcional a variação do fluxo na bomba de
lama. Quando o fluxo de lama aumenta, aumenta a pressão hidrostática e, portanto, a BHP
também aumenta, e quando o fluxo de lama diminui a pressão também o acompanha.

50
Figura 17 - Comportamento da pressão de fundo a variações no fluxo da bomba de lama
A Figura 18 mostra o comportamento dos estados, pressão da bomba de entrada ( ),
fluxo na broca ( ) e pressão da válvula choke ( ), respectivamente. Neste caso, os três
estados se comportam de maneira semelhante à BHP, sendo também diretamente
proporcionais à variação do fluxo na bomba de lama. Isto é, o aumento (diminuição) de fluxo
de lama no sistema, aumenta (diminui) a pressão hidrostática que aumenta (diminui) as
pressões e a vazão na broca.
Figura 18 - Resposta dos estados a variações no fluxo de lama

51
Outras respostas analisadas foram a influencia de perturbações. Enquanto a vazão da
bomba de lama e a abertura da válvula choke foram mantidos constantes nos seus
estados estacionários, ou seja, e respectivamente, foram simulados variações
no influxo no reservatório ( ) e variações na vazão da bomba de pressão reversa ( .
Nas simulações anteriores, estas variáveis permaneceriam em seu valor estacionário
mostrados na Tabela 1.
A primeira perturbação simulada consistiu em variações no influxo no reservatório .
Nesse caso, seu valor estacionário foi modificado em de seu valor inicial, conforme
mostra a Figura 19.
Figura 19 – Sequência de variações na vazão do influxo
O comportamento da pressão de fundo é apresentado na Figura 20. É possível
observar que uma modificação no valor de gera uma variação diretamente proporcional
na pressão de fundo. Essa tendência se repete nos estados mostrados na Figura 21 com
exceção do comportamento da vazão na broca de perfuração . Como a vazão na broca de
perfuração está intimamente ligada com o valor de é ela quem sofre uma alteração
inversamente proporcional a essa modificação do influxo.

52
Figura 20 - Comportamento da pressão de fundo a variações na vazão do influxo
Figura 21 - Resposta dos estados a variações na vazão do influxo
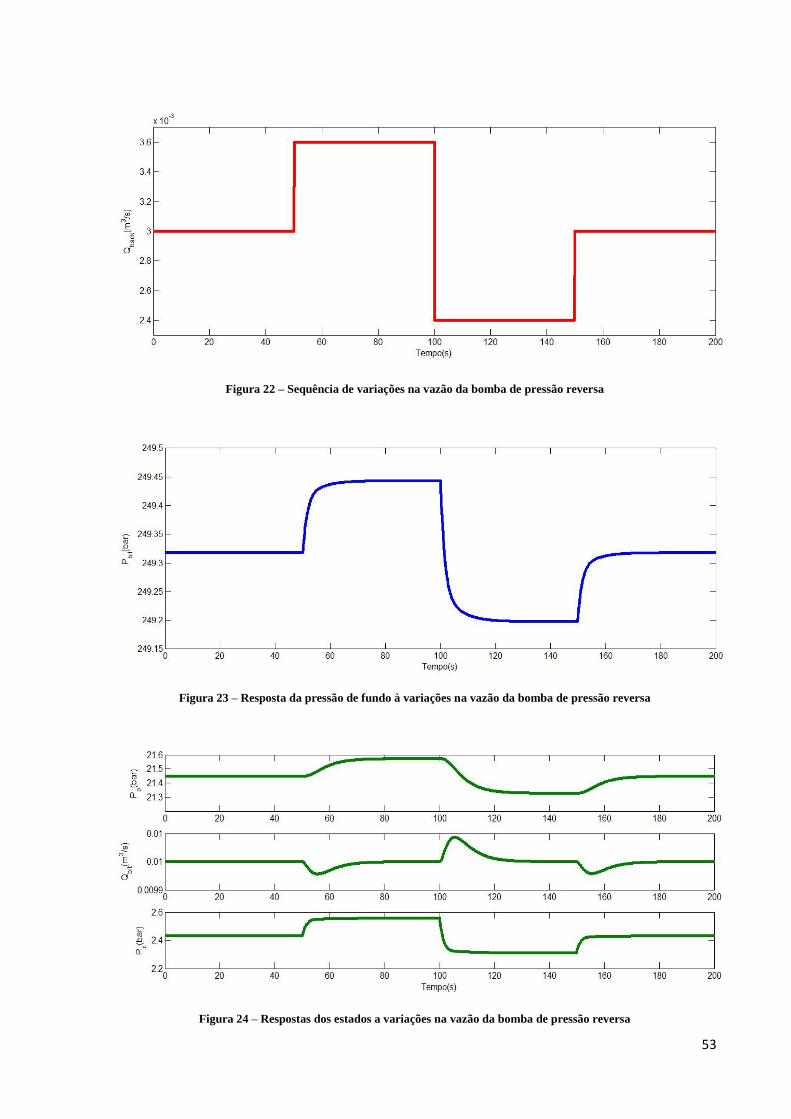
A segunda perturbação analisada é a influência de mudanças na vazão da bomba de
pressão reversa . Neste caso seu valor estacionário foi modificado em de seu
valor inicial, conforme mostrado na Figura 22. O perfil do comportamento da pressão de
fundo é apresentado na Figura 23. É possível observar que uma modificação no valor de
também gera uma variação diretamente proporcional na pressão de fundo. Os estados,
representados na Figura 24, se comportam de maneira semelhante com exceção da vazão na
broca de perfuração . Isso acontece graças à influência que a pressão na válvula choke
tem sobre o fluxo na broca . Nesse caso como ocorre o aumento da pressão na choke há
uma diminuição no valor de e vice-versa.
53
Figura 22 – Sequência de variações na vazão da bomba de pressão reversa
Figura 23 – Resposta da pressão de fundo à variações na vazão da bomba de pressão reversa
Figura 24 – Respostas dos estados a variações na vazão da bomba de pressão reversa

54
Capítulo 4
Teoria de Controle Preditivo (MPC)
4.1 – Introdução
O termo “controle preditivo” (MPC) ou “controle preditivo baseado em modelo”
(MBPC) se refere a uma classe de algoritmos de controle avançado que controla a resposta
futura de uma planta através do uso de um modelo explícito do processo. Em cada instante de
amostragem, o MPC soluciona on-line um problema LQ (linear quadrático) de horizonte
finito, usando o estado atual da planta como estado inicial. O resultado da otimização gera
uma sequência de controle ótimo, que é aplicada de acordo com a filosofia do controle de
horizonte móvel (moving horizon control ou receding horizon control, RHC), fornecendo ao
controlador as características de realimentação desejadas (Sotomayor, 2002).
O MPC não é uma estratégia de controle específica, mas é o nome dado a um conjunto
de métodos de controle que foram desenvolvidos considerando algumas ideias comuns
baseadas no conceito de predição. O modelo de predição é provavelmente o elemento mais
importante dentro do controlador dado que ele deve ser capaz de representar adequadamente a
dinâmica do processo para permitir o cálculo das predições de sua saída, ser intuitivo e ao
mesmo tempo permitir uma análise teórica do sistema (Plucenio et al., 2007).
O MPC surgiu da necessidade prática de lidar com problemas multivariáveis, pois os
controladores convencionais de malha simples foram incapazes de satisfazer os requerimentos
crescentes do desempenho das indústrias. As idéias do MPC tiveram início a partir de 1960
(Garcia et al., 1989), porém, o real interesse neste campo começou a crescer a partir de 1980,
depois da publicação dos primeiros trabalhos sobre o MPHC (model predictive heuristic
control) e o DMC (dynamic matrix control), e particularmente, depois do QDMC (quadratic
dynamic matrix control), que ficaram muito populares na indústria petroquímica e nas
estações de força. Desde essa época, têm surgido novas variantes do MPC. Sem entrar em
detalhes, alguns dos algoritmos MPC são: MAC (model algorithm control), IMC (internal
model control), GPC (generalized predictive control), MOCCA (multivariable, optimal,

55
constrained control algorithm), HIECON (hierarchical constraint control), PFC (predictive
funtional control), OPC (optimum predictive control), PCT (predictive control technology), e
o mais recente RMPCT (robust model predictive control technology). Apesar da enorme
quantidade de abreviações introduzidas, não existem muitas diferenças entre estes algoritmos.
Tipicamente, estes algoritmos diferem no modelo do processo usado, tais como modelos de
parâmetros de Markov (resposta ao impulso), resposta ao degrau, função de transferência,
modelos polinomiais, modelos em espaço de estados, perturbações (constantes, retardos, ruído
branco, etc) e adaptação (Sotomayor, 2002).
Desde 1990, a teoria de controle MPC tem evoluído substancialmente. Questões
teóricas e práticas são tratadas em vários livros (Maciejowski, 2001), (Morari et al., 2002) e
centenas de artigos. Um excelente ponto de partida é o artigo de Qin e Badgwell (1997), que
apresenta uma breve história e comparações de algoritmos MPC, reportando mais de 2200
aplicações industriais. Morari e Lee (1999) discutem o passado, o presente e o futuro do
MPC, enquanto que Rawlings (2000) mostra uma visão geral desta tecnologia. Mayne et al.
(2000) e Löfberg (2001) tratam de otimização, estabilidade e robustez do MPC. No mais
recente trabalho, Nicolaou (2001) trata dos últimos desenvolvimentos do MPC, e discute as
implicações para o futuro da teoria e prática deste controle (Sotomayor, 2002).
Mesmo com o aparecimento de algoritmos MPC não-lineares (NMPC) (Henson, 1998),
(Qin e Badgwell, 2000), a geração corrente de algoritmos MPC comercialmente disponíveis
são baseados em modelos lineares (LMPC, ou simplesmente MPC). Mais ainda, atualmente,
na literatura de pesquisa, o MPC é quase sempre formulado em espaço de estados (Morari e
Lee, 1999). Isto tem simplificado, unificado e generalizado a teoria, incluindo fácil extensão a
sistemas multivariáveis, fácil análise das propriedades em malha fechada e cálculo on-line
(Sotomayor, 2002). As principais vantagens do LMPC estão vinculadas as facilidades de
obtenção de modelos lineares, se comparados aos não lineares, e as menores dificuldades para
se resolver os problemas de otimização associados. Porém, quando os processos têm dinâmica
muito não linear ou quando a faixa de operação é variável, então necessariamente deverá ser
tomado em conta o modelo não linear no projeto do controle, de forma que permita manter o
desempenho desejado para o sistema em malha fechada (Plucenio et al., 2007).
A Figura 25 ilustra a implementação básica de todos os algoritmos de controle MPC.
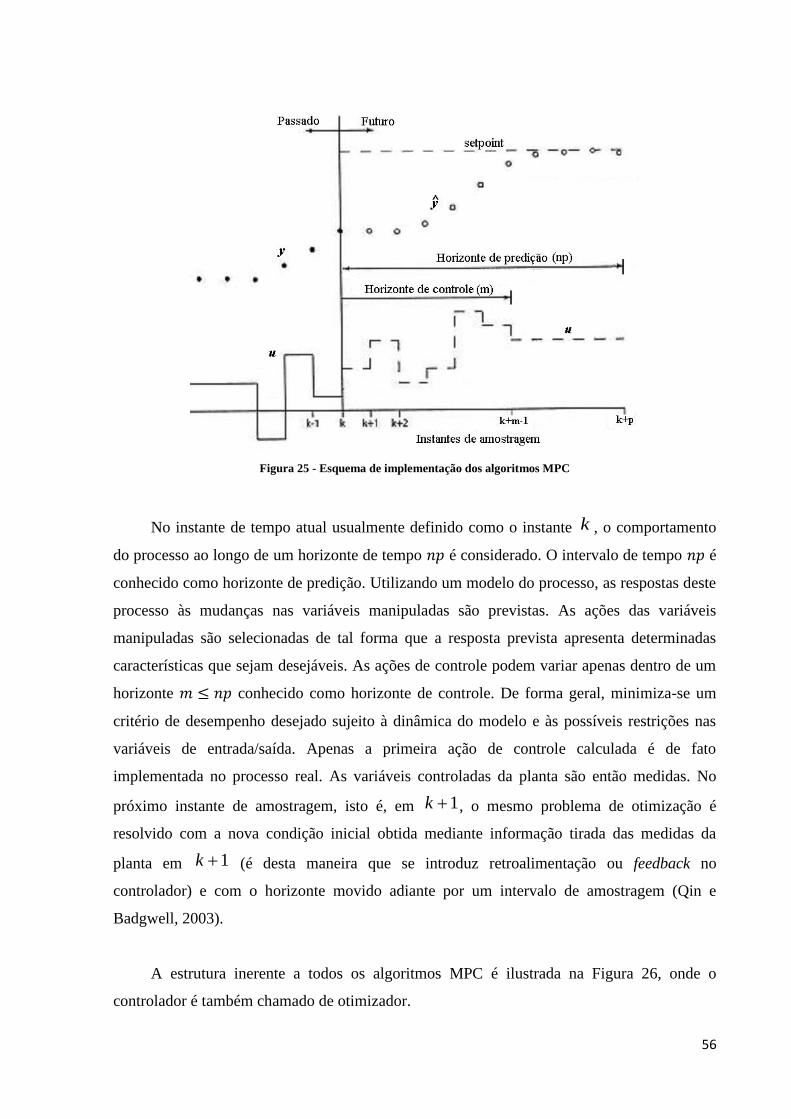
56
Figura 25 - Esquema de implementação dos algoritmos MPC
No instante de tempo atual usualmente definido como o instante k , o comportamento
do processo ao longo de um horizonte de tempo é considerado. O intervalo de tempo é
conhecido como horizonte de predição. Utilizando um modelo do processo, as respostas deste
processo às mudanças nas variáveis manipuladas são previstas. As ações das variáveis
manipuladas são selecionadas de tal forma que a resposta prevista apresenta determinadas
características que sejam desejáveis. As ações de controle podem variar apenas dentro de um
horizonte conhecido como horizonte de controle. De forma geral, minimiza-se um
critério de desempenho desejado sujeito à dinâmica do modelo e às possíveis restrições nas
variáveis de entrada/saída. Apenas a primeira ação de controle calculada é de fato
implementada no processo real. As variáveis controladas da planta são então medidas. No
próximo instante de amostragem, isto é, em k 1, o mesmo problema de otimização é
resolvido com a nova condição inicial obtida mediante informação tirada das medidas da
planta em k 1 (é desta maneira que se introduz retroalimentação ou feedback no
controlador) e com o horizonte movido adiante por um intervalo de amostragem (Qin e
Badgwell, 2003).
A estrutura inerente a todos os algoritmos MPC é ilustrada na Figura 26, onde o
controlador é também chamado de otimizador.

57
Figura 26 - Estrutura de um sistema de controle MPC
4.2 – LMPC Convencional - O Controlador QDMC
Os primeiros controladores aplicados na indústria no início dos anos 70 utilizavam a
estratégia MPC sem restrições também conhecido como DMC1, que usavam um modelo de
convolução linear de resposta ao degrau e geração da sequência de controle por otimização
analítica. Porém, com o aparecimento de restrições presentes nos processos que necessitavam
a sua inclusão no desenvolvimento do controlador, foi necessária uma evolução do algoritmo
de controle. A otimização neste caso passou a ser numérica e a solução do problema convexo
DMC por meio de programação quadrática (QP) deu origem ao QDMC, proposto por Garcia e
Morshedi (1986).
O QDMC usa as mesmas equações de predição do DMC, ou seja:
euAe (45)
1 A síntese do desenvolvimento do DMC pode ser encontrada no Apêndice A deste trabalho.

58
onde:
- é o vetor de erros entre os valores previstos e o valor desejado.
- é o vetor de erros entre o valor desejado e os valores previstos se não houver
nenhuma ação de controle futura (sistema em malha aberta).
- é a matriz dinâmica.
Considerando a seguinte função objetivo:
uRRu2
1WeWe
2
1 TTTT (46)
sendo que:
- é a matriz de fatores de supressão que atenua as variações das ações de controle
- é a matriz diagonal de ponderação onde os valores da diagonal principal são
proporcionais à importância da variável controlada
Substituindo a Equação (45) na Equação (46), temos:
uRRu2
1euAWWeuA
2
1 TTTT ´´ (47)
´´´ WeWe2
1uWAWeuRRWAWAu
2
1 TTTTTTTT (48)
Como o último termo do segundo membro, não depende da variável de interesse u , a
função objetivo do controlador pode ser escrita como:
ucuHu TT
u
2
1min (49)
onde:

59
RRWAWAH TTT (50)
WAWec TTT ´ (51)
Ao problema definido na Equação (49) podemos incluir as restrições nas variáveis
manipuladas e controladas:
1. Nos incrementos das manipuladas: maxmax uuu
ou seja:
1a) maxuu ou max. uuImNm
1b) maxuu ou max. uuImNm
As condições 1a) e 1b) podem ser resumidas em:
max
max
.
.
u
uu
I
I
m
m
Nm
Nm (52)
2. Nos valores das manipuladas: maxmin uuu
Como:
1
1
1
1
1
1
1 0
00
k
k
k
mk
k
k
NNN
NN
N
mk
k
k
u
u
u
u
u
u
III
II
I
u
u
u
u
mmm
mm
m
ou

60
1 kuuNu
Portanto:
2a) maxuu equivale a 1max kuuuN
2b) minuu equivale a min1 uuuN k
Daí as condições 2a) e 2b) podem ser resumidas em:
min1
1max
uu
uuu
N
N
k
k (53)
Resumindo, o problema de otimização que o QDMC resolve tem a função objetivo
definida na Equação (49) e as restrições representadas pelas Equações (52) e (53). É fácil
observar que a função objetivo é quadrática em u e as restrições são todas lineares. Esse
tipo de problema é clássico dentro da área otimização e é conhecido como o problema de
programação quadrática (PQ). Do resultado da otimização, só a primeira ação de controle do
vetor u é usado na planta.
4.3 – NMPC Convencional
Embora os processos industriais sejam em geral não-lineares, a maior parte das
aplicações MPC são baseadas no uso de modelos lineares. Existem duas principais razões
para isso: por um lado, a identificação de um modelo linear baseado nos dados do processo é
relativamente fácil e, por outro lado, modelos lineares produzem bons resultados quando a
planta opera na vizinhança do ponto de operação. Nas indústrias de processos, onde o LMPC
é amplamente difundido, o objetivo é manter o processo próximo ao estado estacionário ao
invés de mudar frequentemente de um ponto de operação para outro, e, por isso, um modelo
linear preciso é suficiente. Além disso, o uso de um modelo linear em conjunto com função
objetivo quadrática leva a um problema QP que converge e cuja solução é implementada em
diversos produtos comerciais disponíveis. A existência de algoritmos que garantem uma
solução convergente em um período mais curto que o período de amostragem é crucial em
processos com grande número de variáveis (Camacho et al., 2005).

61
Entretanto, a resposta dinâmica resultante de um controlador linear é inaceitável quando
aplicada ao um processo não-linear com vários graus de severidade. Embora em muitas
situações o processo possa estar operando na vizinhança do estado estacionário, e com isso a
representação linear seria adequada, existem diversas situações onde isso não ocorre. Por um
lado, há processos onde a não linearidade é tão severa (até mesmo na proximidade do estado
estacionário), e tão crucial para a estabilidade em malha fechada, que um modelo linear não é
suficiente. Por outro lado, há alguns processos que experimentam transições contínuas
(partidas, desligamentos, etc.) e passam um bom tempo longe da região de operação no estado
estacionário, ou até mesmo processos que nunca estão em operação no estado estacionário,
como no caso dos fornos, onde toda a operação é levada no modo transiente. Para esses
processos uma lei de controle linear não será muito eficiente, sendo os controladores não-
lineares essenciais para melhorar a performance ou estabilizar a operação (Camacho et al.,
2005).
Do ponto de vista conceitual o NMPC não apresenta dificuldades. Considerando a
mesma função objetivo que no caso linear e um modelo não-linear para o cálculo das
predições, o objetivo consiste novamente em encontrar o controle que minimize a função
objetivo num algoritmo de horizonte móvel. Já, do ponto de vista prático, são várias as
dificuldades encontradas neste problema (se comparado ao caso linear): (a) a determinação do
modelo do processo, quando deve ser obtido por identificação, (b) a obtenção do sinal de
controle requer, em geral, a solução de um problema otimização não-convexo, e (c) a análise
de estabilidade e robustez da solução. Por estes motivos o NMPC é um campo aberto para
pesquisas tanto na área de determinação de modelos como nos procedimentos e algoritmos de
otimização para o cálculo do controle (Plucenio et al., 2007).
Existe uma grande quantidade de técnicas MPC que direta ou indiretamente tratam
sistemas não-lineares (Findeisen & Allgöwer, 2002). Uma possível classificação destas
técnicas as divide em 3 grupos: (a) as que utilizam diretamente um modelo não-linear
genérico e um algoritmo de otimização não-linear de propósito geral; (b) as que utilizam
modelos não-lineares particulares (como séries de Volterra ou modelos de Hammerstein) e
métodos de otimização específicos para o modelo escolhido; (c) as que utilizam um ou vários
modelos lineares para representar o processo e algoritmos de otimização lineares.

62
Evidentemente as vantagens e desvantagens de uma ou outra alternativa estão diretamente
relacionadas ao compromisso desempenho-custo computacional (Plucenio et al., 2007).
Definido o modelo não linear que será utilizado no controlador, é hora de montar o
algoritmo de controle. No presente trabalho, adotou-se a técnica do grupo (a), onde é utilizado
um modelo não-linear geral do processo e um algoritmo de otimização de propósito geral.
Uma versão simplificada deste algoritmo NMPC foi desenvolvida por Qin & Badgwell
(2000), a qual é apresentada a seguir.
Levando em consideração que a planta a ser controlada pode ser descrita pelo modelo
em espaço de estados, não-linear e discreto no tempo definido pelas seguintes equações:
(54)
(55)
onde é um vetor de entradas do processo ou variáveis manipuladas,
é um vetor de saídas do processo ou variáveis controladas, é o vetor de
variáveis de estado, é o vetor de variáveis de perturbações medidas,
é um vetor de perturbações não medidas ou ruído, e é o vetor de ruído.
Para resolver o problema de controle é necessário resolver computacionalmente uma
sequência de entradas que levarão o processo do seu estado atual para o estado desejado
. Perturbações feedfoward são removidas incorporando seus efeitos ao modelo .
Perturbações feedback são tipicamente manuseadas assumindo que uma perturbação em
degrau foi colocado na saída e ela permanecerá constante por todo o tempo futuro. Para
alcançar isso, um termo que compara a saída prevista atual com a atual medida da saída
é dado por:
(56)
sendo que o termo será utilizado para as predições subseqüentes, da forma:
( ) (57)

63
O algoritmo de controle aqui descrito minimiza a seguinte função:
∑ ‖
‖
∑ ‖ ‖
(58)
sujeita às seguintes restrições:
( ) (59)
( ) (60)
(61)
(62)
Sendo o horizonte de predição e o horizonte de controle, o comportamento das
futuras saídas é controlado penalizando os desvios do estado estacionário desejado , ou seja,
ela verifica o valor atual e o valor desejado e calcula o erro
representado por:
(63)
O termo corresponde às variações na entrada, representa a entrada num
determinado instante , sendo que nesse caso, varia de acordo com o horizonte de
controle . As matrizes e são as matrizes de peso, elas definem os ganhos que serão
atribuídos a cada variável controlada e manipulada, ou seja, é possível atribuir uma
“importância” a cada saída ou entrada e dessa forma ajustar o controlador parar funcionar de
maneira mais próxima à desejada.
Do ponto de vista prático a principal vantagem desse método reside no uso de um
modelo não linear, que permite em geral, obter predições muito próximas às saídas reais da
planta. Como desvantagens devem citar-se as questões iterativas dos métodos de otimização,
a incerteza no tempo que levam para entregar uma resposta, a convergência, as soluções em
mínimos locais, etc. que fazem com que sua utilização para controle em tempo real seja ainda
pouco difundida (Plucenio et al., 2007).

64
Capítulo 5
Controle Preditivo do Processo de
Perfuração
5.1 – Introdução
Neste capítulo são apresentados os resultados das simulações da aplicação do sistema de
controle avançado no processo de perfuração, cujo layout em ambiente MatLab/Simulink® é
mostrado na Figura 27. Dois sistemas de controle avançado são implementados: um baseado
no LMPC e outro no NMPC, apresentados no capítulo anterior. O objetivo é analisar o
comportamento de ambos os sistemas, bem como tecer comparações acerca de seus
desempenhos quando submetidos a diversas variações nas condições de operação. Seguindo a
estratégia proposta por Breyholtz et al. (2009), aqui a BHP ( ) é controlada pela
manipulação da vazão da bomba de lama ( ) e da abertura da válvula choke
( ). A vazão de influxo do reservatório ( ) e a vazão da bomba de pressão reversa
( são consideradas como perturbações.
Figura 27 – Controle MPC da coluna de perfuração

65
5.1 – Controle LMPC do Processo de Perfuração
A implementação do LMPC usa um modelo linear do processo, em forma de matriz de
funções de transferência, como mostrado na Tabela 2, para predição e os parâmetros de
sintonia listados na Tabela 3. As funções de transferência foram obtidas pela aplicação do
teste de resposta ao degrau no sistema em malha aberta. Os parâmetros de sintonia do
controlador foram definidos após extensivas simulações, usando algumas regras heurísticas da
literatura e o procedimento da tentativa e erro.
Tabela 2 - Funções de transferência do modelo linear
Tabela 3 - Parâmetros de sintonia do controlador LMPC
Parâmetro Descrição Valor
Tempo de amostragem 0,5 s
N Horizonte do modelo 400
Número de saídas 1
Número de entradas 2
Horizonte de predição (otimização) 20
Horizonte de controle 2
Limite mínimo das entradas [0 0]
Limite máximo das entradas [0,03 1]
Incremento máximo das entradas [0,001 0,01]
Fator de ponderação da saída 1
Fator de supressão das entradas [1000 200]
A resposta do processo a mudanças no ponto de operação é mostrada na Figura 28. Na
primeira mudança de setpoint, e após uma oscilação moderada, o sistema demora para
estabilizar aproximadamente 65 s. Já na segunda e terceira mudança de setpoint, o sistema
estabiliza em 25s e 15s, respectivamente, com um pequeno sobressinal na segunda mudança.

66
A Figura 29 mostra a coordenação das variáveis manipuladas para atingir o ponto de operação
desejado.
Figura 28 – Resposta da pressão de fundo com LMPC a variações no setpoint
Figura 29 - Comportamento das variáveis manipuladas com LMPC a variações no setpoint
Influência da variação de influxo do reservatório é apresentada na Figura 30. Neste
caso, o valor de é alterado de para , no tempo t = 100 s. Como
pode ser observado, depois de um aumento da BHP, esta não volta a seu ponto de operação,
exibindo um offset com respeito ao setpoint. Esta falta de controle pode ser explicada pela
saturação das duas variáveis manipuladas, conforme mostrado na Figura 31.

67
Figura 30 - Resposta da pressão de fundo com LMPC a variação na vazão de influxo do reservatório
Figura 31 - Comportamento das variáveis manipuladas com LMPC a variação na vazão de influxo do reservatório
Efeito da variação da vazão da bomba de pressão reversa é mostrado na Figura 32. Esta
perturbação acontece no tempo t = 100s, quando a vazão muda de e para
, provocando um pico positivo considerável no valor da pressão que estabiliza no
ponto de operação nominal depois de aproximadamente 100 s. As variações das variáveis
manipuladas para compensar a perturbação são mostradas na Figura 33, exigindo um aumento
da abertura da válvula choke e a diminuição quase total da vazão de lama de perfuração.
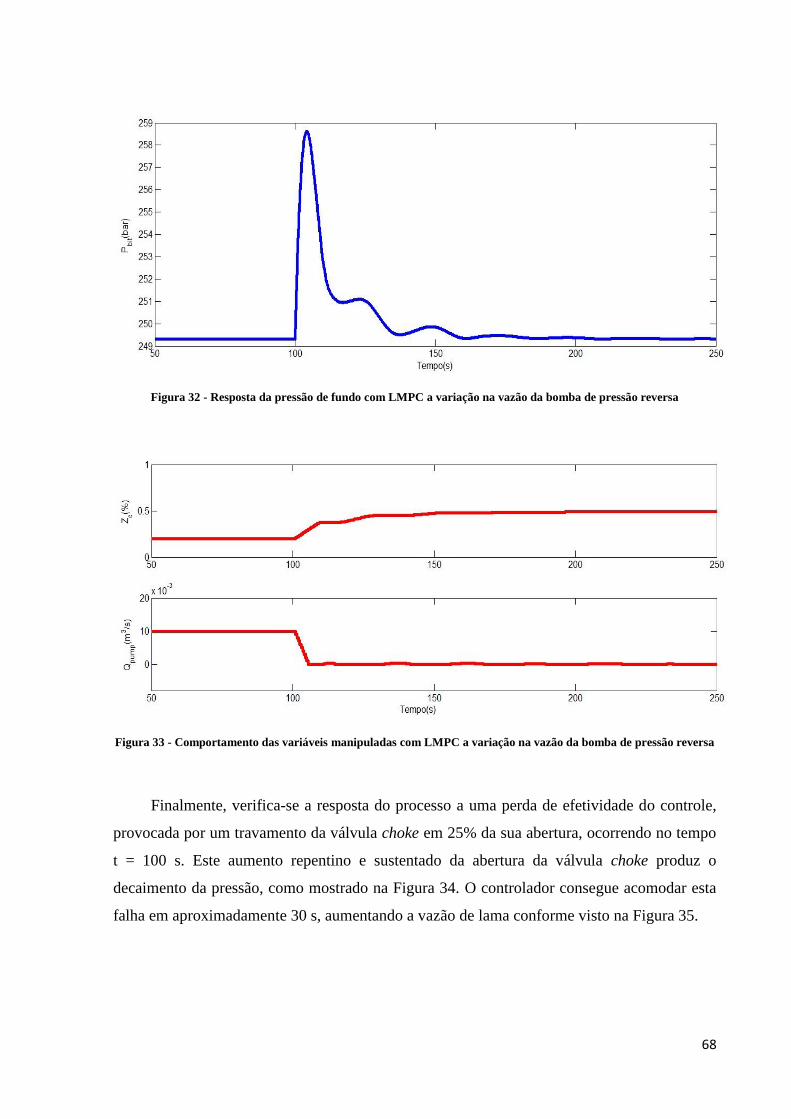
68
Figura 32 - Resposta da pressão de fundo com LMPC a variação na vazão da bomba de pressão reversa
Figura 33 - Comportamento das variáveis manipuladas com LMPC a variação na vazão da bomba de pressão reversa
Finalmente, verifica-se a resposta do processo a uma perda de efetividade do controle,
provocada por um travamento da válvula choke em 25% da sua abertura, ocorrendo no tempo
t = 100 s. Este aumento repentino e sustentado da abertura da válvula choke produz o
decaimento da pressão, como mostrado na Figura 34. O controlador consegue acomodar esta
falha em aproximadamente 30 s, aumentando a vazão de lama conforme visto na Figura 35.

69
Figura 34 - Resposta da pressão de fundo com LMPC a perda de controle da válvula choke
Figura 35 - Comportamento das variáveis manipuladas com LMPC a perda de controle da válvula choke
5.3 – Controle NMPC do Processo de Perfuração
A implementação do NMPC usa o mesmo modelo não-linear que descreve o processo
para predição da saída e os parâmetros de sintonia listados na Tabela 4. De maneira
semelhante ao caso linear, os parâmetros de sintonia do controlador foram definidos após
extensivas simulações, usando algumas regras heurísticas da literatura e o procedimento da
tentativa e erro. Para efeitos de comparação de desempenho do NMPC com o LMPC, foram
praticadas as mesmas variações nas condições de operação que no caso linear, apresentadas
na seção 5.2.

70
Tabela 4 - Parâmetros de sintonia do controlador NMPC
Parâmetro Descrição Valor
Tempo de amostragem 0,5 s
Números de saídas 1
Número de entradas 2
Horizonte de predição (otimização) 10
Horizonte de controle 1
Limite mínimo das entradas [0 0]
Limite máximo das entradas [0,03 1]
Fator de ponderação da saída 1
R Fator de supressão das entradas [200 200]
A resposta do processo a uma sequência de mudanças no setpoint é mostrada na Figura
36. Na primeira mudança de setpoint, o sistema atinge, sem oscilações, o novo ponto de
operação em 25s e aí permanece. Na segunda mudança de setpoint o acompanhamento é
quase que imediato, estabilizando em 3s, e na terceira mudança, o sistema alcança o novo
ponto de operação em aproximadamente 13s. O comportamento das variáveis manipuladas é
mostrado na Figura 37. Há uma oscilação brusca em , principalmente na segunda
variação de setpoint, mas em geral as respostas das variáveis manipuladas foram rápidas, o
que permitiu que o processo alcance rapidamente os novos pontos de operação sem
oscilações.
Figura 36 - Resposta da pressão de fundo com NMPC a variações no setpoint
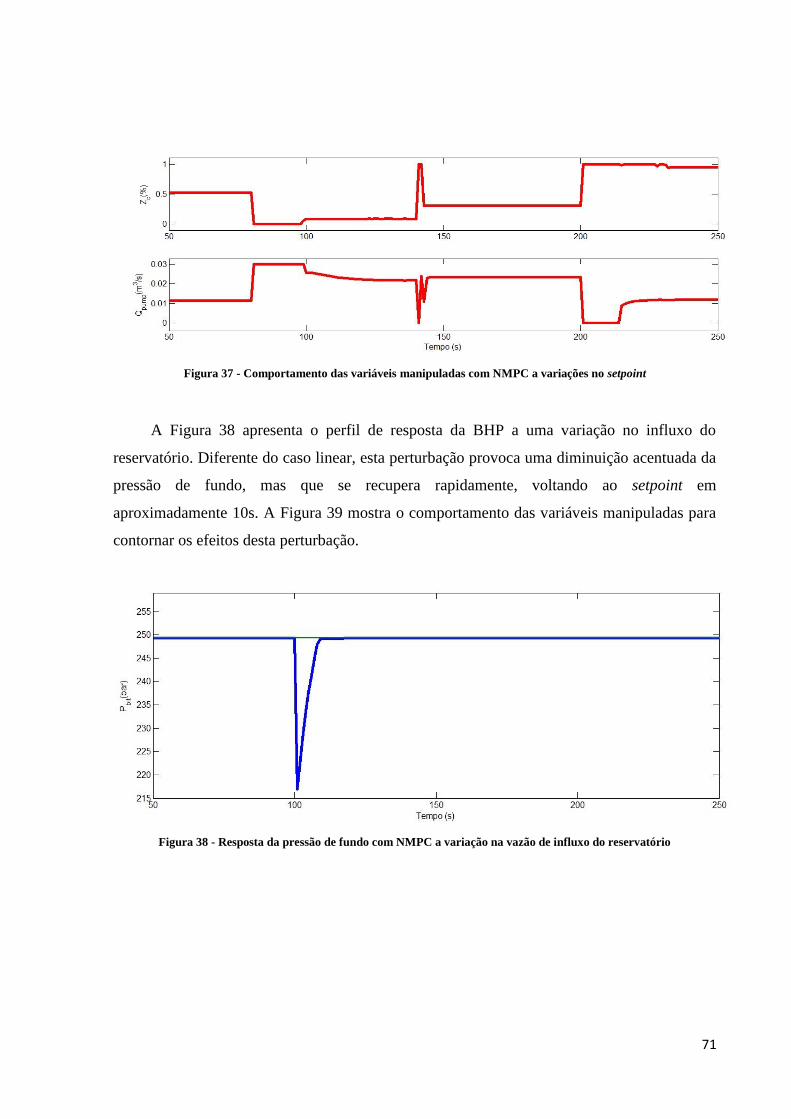
71
Figura 37 - Comportamento das variáveis manipuladas com NMPC a variações no setpoint
A Figura 38 apresenta o perfil de resposta da BHP a uma variação no influxo do
reservatório. Diferente do caso linear, esta perturbação provoca uma diminuição acentuada da
pressão de fundo, mas que se recupera rapidamente, voltando ao setpoint em
aproximadamente 10s. A Figura 39 mostra o comportamento das variáveis manipuladas para
contornar os efeitos desta perturbação.
Figura 38 - Resposta da pressão de fundo com NMPC a variação na vazão de influxo do reservatório
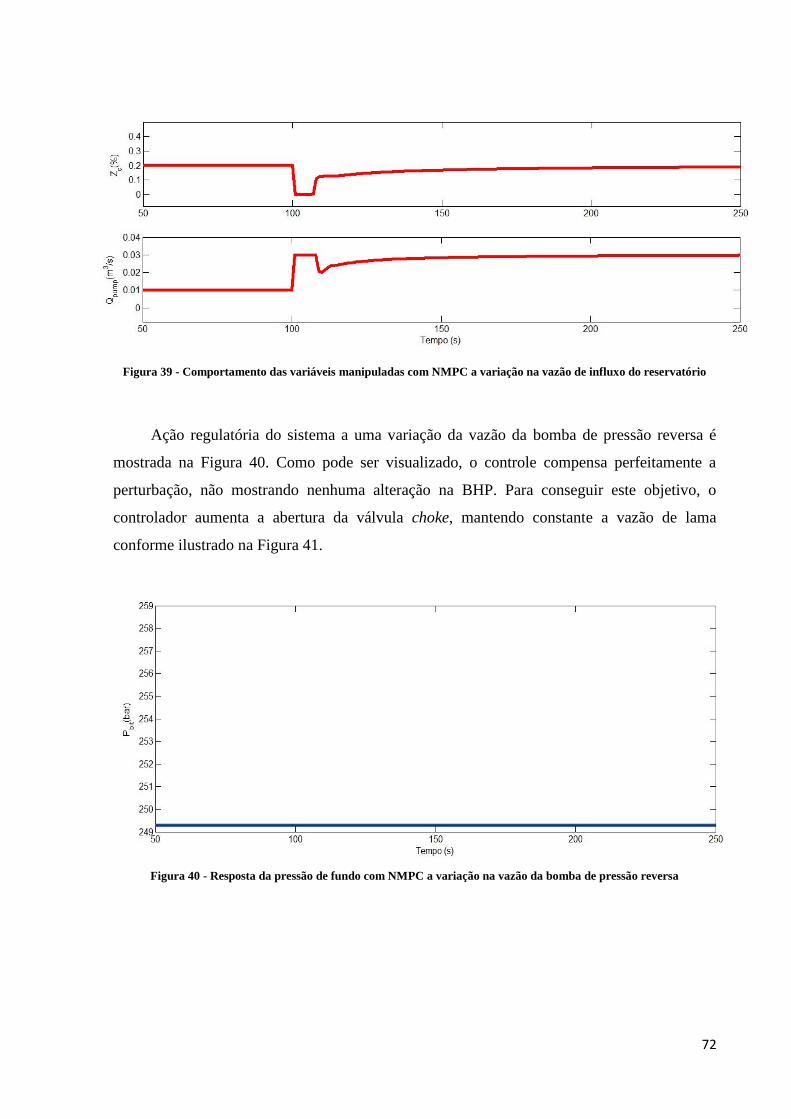
72
Figura 39 - Comportamento das variáveis manipuladas com NMPC a variação na vazão de influxo do reservatório
Ação regulatória do sistema a uma variação da vazão da bomba de pressão reversa é
mostrada na Figura 40. Como pode ser visualizado, o controle compensa perfeitamente a
perturbação, não mostrando nenhuma alteração na BHP. Para conseguir este objetivo, o
controlador aumenta a abertura da válvula choke, mantendo constante a vazão de lama
conforme ilustrado na Figura 41.
Figura 40 - Resposta da pressão de fundo com NMPC a variação na vazão da bomba de pressão reversa
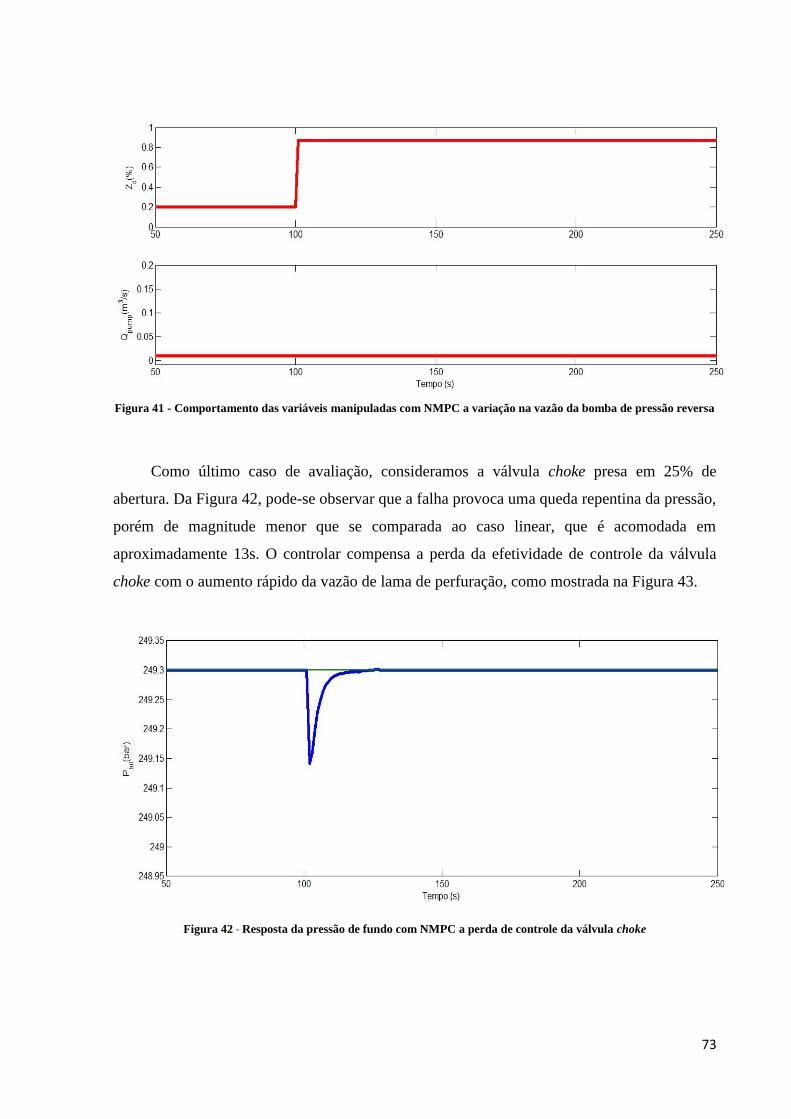
73
Figura 41 - Comportamento das variáveis manipuladas com NMPC a variação na vazão da bomba de pressão reversa
Como último caso de avaliação, consideramos a válvula choke presa em 25% de
abertura. Da Figura 42, pode-se observar que a falha provoca uma queda repentina da pressão,
porém de magnitude menor que se comparada ao caso linear, que é acomodada em
aproximadamente 13s. O controlar compensa a perda da efetividade de controle da válvula
choke com o aumento rápido da vazão de lama de perfuração, como mostrada na Figura 43.
Figura 42 - Resposta da pressão de fundo com NMPC a perda de controle da válvula choke

74
Figura 43 - Comportamento das variáveis manipuladas com NMPC a perda de controle da válvula choke
5.4 – Discussão de Resultados
Foram realizadas simulações equivalentes em ambos os controladores, a primeira diz
respeito a variação do setpoint. Nesse caso é possível observar a rapidez com que o
controlador LMPC responde se comparado ao NMPC. Um exemplo disso é que para a
primeira entrada de um degrau positivo no sistema o LMPC demora apenas 25 segundos para
efetivamente controlar o processo já o NMPC demora cerca de 65 segundos.
Mediante a ocorrência de um aumento na vazão do influxo do reservatório, o NMPC
sofre uma alteração mais brusca em sua saída, porém rapidamente compensada, levando a
pressão de fundo novamente ao valor desejado. O mesmo não ocorre no LMPC. Nesse caso a
variação da saída é um pouco mais branda, mas o controlador após a ocorrência dessa
perturbação não consegue levar a saída ao valor desejado.
Quando alterada a vazão da bomba de pressão reversa novamente o NMPC possui
uma melhor resposta, pois mesmo com a inserção dessa perturbação a saída não foi afetada,
graças à rápida ação das variáveis manipuladas. Já a saída do LMPC sofreu uma modificação
que resultou em uma demora do sistema a controlar a pressão de fundo novamente.
Ao simular um problema na válvula choke, nesse caso seu travamento em um
determinado valor, o tempo de resposta de ambos os controladores foram bem próximos,
75
ficando a diferença entre eles a variação que ocorreu na saída do controlador. O NMPC teve
uma variação ligeiramente menor que o LMPC.
Ao serem realizadas as devidas comparações de desempenho dos sistemas de controle
avançado, foi possível notar a superioridade do NMPC quando comparado ao LMPC. Nas
simulações realizadas, o controlador NMPC obteve um comportamento mais suave da saída e
mesmo nos momentos em que houve a presença de variações e perturbações, as variáveis
manipuladas, nesse caso a bomba de entrada de lama e a válvula choke, não apresentaram
oscilações que pudessem prejudicar o desempenho do sistema ao longo de sua utilização.
O fato de algoritmo NMPC responder de forma rápida resulta inclusive em uma
diferença entre as repostas quando é inserida no sistema a ocorrência de um influxo sob a
forma da variável . De acordo com o modelo (Figuras 19 e 20) quando o valor do influxo
aumenta, a pressão de fundo deveria aumentar. Esse evento pode ser observado nas
Figuras 30 e 31 que representam essa variação no controlador linear (LMPC). Porém, no
controlador não linear (NMPC), as Figuras 38 e 39 mostram que isso não ocorre.
Esse fenômeno se deve ao fato de que como o esse controlador possui duas entradas e
uma saída, e seu grau de liberdade é positivo, podem, nesse sistema, ocorrer variações quanto
ao comportamento das entradas. E como nesse caso, o controlador responde de maneira muito
rápida ele gera distúrbios nos comportamentos das variáveis de entrada e consequentemente
retorna a resposta mostrada na Figura 38.
76
Capítulo 6
Conclusões e Recomendações
6.1 – Conclusões
É de extrema importância durante o processo de perfuração ter controle sobre a pressão
de fundo do poço a ser perfurado, tanto para evitar acidentes que possam vir a causar perdas
de vidas humanas, ambientais e financeiras quanto para minimizar o desperdício da lama de
perfuração, que é quem encarece o processo como um todo, e diminuir o tempo em que a
sonda passa não operante. Esse trabalho teve como objetivo estudar algumas técnicas de
controle avançado aplicadas a perfuração de poços de petróleo.
No desenvolvimento e implementação do modelo da coluna de perfuração, dois
modelos foram estudados, porém vista a necessidade de um fluido monofásico imposta pelo
MPD, o modelo de Nygaard (2006) foi descartado e foi utilizado como base das
implementações o modelo de Stamnes (2007). As simulações realizadas em malha aberta
condizem com o esperado de um sistema real.
No tocante as técnicas de controle, dois controladores foram implementados. O primeiro
foi baseado em um modelo linearizado da coluna de perfuração resultando em um algoritmo
de controle LMPC. Já o segundo controlador, um NMPC, foi obtido a partir de um modelo
não linear do processo. Para efeitos de comparação, foram realizadas as mesmas simulações
em ambos os controladores. Ao longo do trabalho foi possível visualizar a superioridade do
algoritmo NMPC, algoritmo esse que resultou em respostas mais rápidas e um controle mais
suave com poucas penalizações aos componentes manipulados do sistema, o que, para o caso
do processo de perfuração, é algo bastante útil visto que uma demora em controlar a pressão
pode resultar em acidentes que possam a levar a perdas financeiras, ecológicas e até humanas.
A utilização de algoritmos LMPC é mais difundida no mercado, mas isso não significa
que algoritmos NMPC sofrem de deméritos, sua aplicação é mais escassa devido à dificuldade
77
intrínseca a um processo não linear. Porém como visto nesse trabalho é possível implementar
um controlador NMPC de maneira relativamente simples e cujos resultados são satisfatórios
e, como nesse caso, superiores àqueles obtidos com a utilização de algoritmos LMPC.
6.2 – Trabalho Futuros
A vertente dos controladores NMPC vem ganhando espaço diante as publicações
acadêmicas e científicas. Os algoritmos de controle não-linear são ferramentas poderosas na
manutenção e controle de processos industriais dos mais variados graus de complexidade.
Com isso a continuidade do estudo desse tipo de controle é válida principalmente quando
aplicada a setores cuja exploração tende a crescer como no caso da indústria de petróleo e
mais especificamente no processo de perfuração de poços.
Como trabalho futuros, recomenda-se usar modelos mais rigorosos de processos de
perfuração, visto que os contidos nesse trabalho são modelos de ordem reduzida de
parâmetros concentrados. Outra sugestão é a avaliação dos controladores sujeita a variações
nos parâmetros do processo, como densidade do lama de perfuração, ou que levem em
consideração outras variáveis manipuladas, como a bomba de pressão reversa, ou outras
variáveis controladas como a ROP. Além disso, os controladores avançados LMPC e NMPC
aqui testados, podem ser implementados como sendo parte de uma estrutura de controle
hierárquica, conforme proposto em Breyholtz (2010a). Estruturas de controle hierárquico são
comumente adotadas para controlar plantas completas, não só relacionadas à indústria do
petróleo, como também em setores da indústria em geral, cujos processos são dotadas de uma
certa complexidade.

78
Referências Bibliográficas
Alberta Energy and Utilities Board (1994). ID 94-3: Underbalanced drilling. Technical
Report. Alberta, Canadá.
Bellumat, E.; Perezynski, W. C.; Araújo, N. F.; Freitas, M. G.; Veja, M. P. (2011).
Controle de pressão anular de fundo e da taxa de penetração durante a perfuração de poços de
petróleo. In: Anais do IX Congresso Brasileiro de Engenharia Química – Iniciação Científica
(COBEQ-IC 2009), Maringá, Brasil.
Breyholtz, Ø. (2008). Nonlinear model predictive pressure control during drilling
operations. Master Thesis. Norwegian University of Science and Technology. Noruega.
Breyholtz, Ø.; Nygaard, G.; Godhavn, J. M.; Vefring, E. H. (2009). Evaluating control
designs for co-ordinating pump rates and choke valve during managed pressure drilling
operations. In: Proceeding of the IEEE Multi-conference on Systems and Control (MSC
2009), São Petersburgo, Rússia.
Breyholtz, Ø.; Nygaard, G.; Siahaan, H.; Nikolaou, M. (2010a). Managed pressure
drilling: a multi-level control approach. In Proceeding of SPE Intelligent Energy Conference
and Exhibition, Utrecht, Holanda.
Breyholtz, Ø.; Nygaard, G.; Nikolaou, M. (2010b). Automatic control of managed
pressure drilling. In: Proceeding of the 2010 American Control Conference (ACC’2010),
Baltimore, USA.
Camacho, E. F; Bordons, C. (2005). Nonlinear model preditive control: an
introductory review. In: International Workshop on Assessment and Future Directions of
Nonlinear Model Predictive Control (NMPC05), Freudenstadt-Lauterbad, Germany.
79
Carvalho Neto, H. S. (2010). Controle preditivo multi-modelos da pressão anular de
fundo na perfuração de poços de petróleo. Trabalho de Conclusão de Curso, Universidade
Federal de Sergipe.
Coker, I. (2004). Managed pressure drilling applications index. In: Proceeding of the
Offshore Technology Conference, Houston, USA.
Como foi formada a camada do pré-sal. Disponível em:
<http://mundoestranho.abril.com.br/materia/como-foi-formada-a-camada-do-presal>
Acessado em: 05/09/2010.
COPPE (2009). Corrida para o mar: os desafios tecnológicos e ambientais do pré-sal.
UFRJ, Rio de Janeiro, Brasil.
Deepwater Horizon. Disponível em <http://deepwaterhorizon.com/>. Acessado em:
18/09/2011.
Elliot, D.; Montilva, J.; Francis, P.; Reistman, D.; Shelton, J.; Roes, V. (2011).
Managed pressure drilling erases the lines. Oilfield Review, 23(1):14-23.
Entenda o que é a camada pré-sal. Disponível em
<http://www1.folha.uol.com.br/folha/dinheiro/cult91u440468.shtml> Acessado em:
05/09/2010
Fraga, C.T.C. (2008). O pré-sal e seus desafios. Audiência Pública no Senado Federal,
Brasília, Brasil.
Findeisen, R; Allgöwer, F. (2002). An Introduction to nonlinear model predictive
control. In: Proceedings of the 21st Benelux Meeting on Systems and Control, Veldhoven,
Holanda.
Garcia, C. E; Morshedi, A. M. (1986). Quadratic programming solution of dynamic
matrix control (QDMC). Chemical Engineering Communications, 46(1-3):73-87.

80
Helgestad, D.-E. (2010). The drilling process: a plantwide control approach. Master
Thesis, Norwegian University of Science and Technology, Noruega.
Henson, M.E. (1998). Nonlinear model predictive control: current status and future
directions. Computers and Chemical Engineering, 23(2):187-202.
Hydro. (2007). Technology outlook 2007 - efficient well construction. Technical
report, Hydro.
Kaasa, G.-O. (2007). A simple dynamic model of drilling for control. Technical
Report, Statoil Hydro Resarch Centre Porsgrunn.
Kaasa, G.-O.; Stamnes, Ø. N.; Imsland, L.; Aamo, O. M. (2011). Intelligent estimation
of downhole pressure using a simple hydraulic model. In: Proceedings of the IADC/SPE
Managed Pressure Drilling and Underbalanced Operations Conference and Exhibition,
Denver, USA.
Li, Z., Hovakimyan, N.; Cao C.; Kaasa, G.-O. (2009). Integrated estimator and
adaptive controller for well drilling systems. In: Proceedings of the 2009 American Control
Conference (ACC’09), St. Louis, USA.
Löfberg, J. (2001). Linear model predictive control: stability and robustness. PhD.
Thesis, Linköping University, Suécia.
Martin, M.D. (2006). Managed pressure drilling techniques and tools. Mater Thesis,
A&M University. Texas, EUA.
Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O.M (2000). Constrained model
predictive control: stability and optimality. Automatica, 36(6): 789-814.
Morari, M.; lee, J.H. (1999). Model predictive control: past, present and future.
Computers and Chemical Engineering, 23(4-5): 667-682.

81
Morari, M.; Lee, J.H.; Garcia, C.E. (2002). Model predictive control. Prentice-Hall,
2002.
Nygaard, G.; Nævdal, G. (2006). Nonlinear model predictive control scheme for
stabilizing annulus pressure during oil well drilling. Journal of Process Control, 16(7): 719-
732.
Perfuração underbalanced. Disponível em <http://www.qgdopetroleo.com/
2012/01/perfuracao-underbalanced.html>. Acessado em: 19/04/2012.
Plucenio, A; Rico, J. E. N; Pagano; D. J; Bruciapaglia, A. H. (2007). Controle
preditivo não linear na indústria do petróleo e gás. In: Anais do IV Congresso Brasileiro de
P&D em Petróleo e Gás (4º PDPETRO), Campinas, Brasil.
Qin, S.J.; Badgwell, T.A. (2000). An overview of nonlinear model predictive control
applications. In: “Nonlinear model predictive control”, Allgöwer, F.; Zheng, A. (Eds.),
Progressin Systems and Control Theory Series, v.26. Switzerland: Birkhauser Boston.
Qin, S.J.; Badgwell, T. A. (2003). An overview of industrial model predictive control
technology. Control Engineering Practice, 11(7): 733-764.
Rawlings, J.B. (2000). Tutorial overview of model predictive control. IEEE Control
Systems Magazine, 20(3):38-52.
Rehm, B.; Schubert, J.; Haghshenas, A; Paknejad, A. S; Hughes, J. (2008). Managed
pressure drilling. Gulf Publishing Company, Houston, EUA.
Roosenblatt, L. (2006). Aplicação dinâmica de sistemas ao estudo do comportamento
das taxas diárias de aluguel de sondas de perfuração off-shore. Trabalho de Conclusão de
Curso, UFRJ, Rio de Janeiro, Brasil.
Stamnes, N. Ø. (2007). Adaptive observer for bottomhole pressure during drilling.
Master Thesis. Norwegian University of Science and Technology. Noruega.

82
Stamnes, Ø. N.; Zhou, J.; Kaasa, G.-O.; Aamo, O. M. (2008). Adaptive observer
design for the bottomhole pressure of a managed pressure drilling system. In: Proceedings of
47th IEEE Conference on Decision and Control (CDC 2008), Cancun, Mexico.
Shayegi, S. (2007). Underbalanced drilling and managed pressure drilling – two
methods for optimising drilling. Exploration & Production, Oil & Gas Review. Disponível
em: <www.touchbriefings.com/pdf/2590/Shayegi.pdf>.
Skalle, P. (2009). Pressure control during oil well drilling. Ventus Publishing.
Disponível em: < www.bookboon.com>.
Sotomayor, O. A. Z. (2002). Modelagem, identificação e controle de sistemas de
tratamento de lodo ativado com remoção de nitrogênio. PhD. Thesis, Escola Politécnica da
Universidade de São Paulo, Brasil.
Tercan, E. (2010). Managed pressure drilling techniques, equipment & applications.
Mater Thesis, Middle East Technical University.
Zhou, J.; Stamnes, Ø. N.; Aamo, O. M.; Kaasa, G.-O. (2008). Adaptive output
feedback control of a dynamic drilling system. In: Proceedings of the 47th IEEE Conference
on Decision and Control (CDC 2008), Cancun, Mexico.
Zhou, J.; Stamnes, Ø. N.; Aamo, O. M.; Kaasa, G.-O. (2008). Observer-based control
of a managed pressure drilling system. In: Proceedings of the 27th Chinese Control and
Decision Conference (CCDC’08), Yantai, China.
Zhou, J.; Stamnes, Ø. N.; Aamo, O. M.; Kaasa, G.-O. (2009). Pressure regulation with
kick attenuation in a managed pressure drilling system. In: Proceedings of the 48th IEEE
Conference on Decision and Control and 28th
Chinese Control Conference (CDC/CCC’09),
Shanghai, China.

83
Zhou, J.; Stamnes, Ø. N.; Aamo, O. M.; Kaasa, G.-O. (2010). Swicthed control for
pressure regulation and kick attenuation in a managed pressure drilling system. IEEE
Transactions on Control System Technology. 19(2): 337-350.
Zhou, J.; Nygaard, G.; Godhavn, J.; Breyholtz, Ø.; Vefring, E. H. (2010). Adaptive
observer for kick detection and switched control for bottomhole pressure regulation and kick
attenuation during managed pressure drilling. In: Proceedings of the 2010 American Control
Conference (ACC’2010), Baltimore, EUA.

84
Apêndice A
O Controlador DMC sem Restrições2
Seja um processo com as respostas ao degrau e pulsos unitários representadas na Figura
A1. Sejam N21iai ,,,, os valores de y correspondentes à resposta ao degrau unitário,
nos instantes de amostragem , onde é o período de amostragem e N o instante a partir do
qual a resposta estabiliza. Analogamente, sejam N21ihi ,,,, os valores de
correspondentes à resposta ao pulso unitário nos mesmos instantes de amostragem. Nesse
caso, para o valor de pode ser considerado desprezível. Pode-se demonstrar que:
,,, 23312211 aahaahah (A1)
Ou a forma equivalente:
,,, 123312211 hhhahhaha (A2)
Figura A1: Respostas de um sistema de 2ª ordem ao degrau e pulso unitários.
Com base nessas informações podemos escrever para o instante ( ), o seguinte
modelo de convolução discreta (no domínio do tempo) para a predição da variável :
2 Cutlher, C.R.; Ramaker, B.C. (1980). Dynamic matrix control (DMC) – A computer control algorithm. In: Proc.
Join Automatic Control Conference, San Francisco – CA.

85
N
i
ikik uhy1
11ˆ (A3)
A equação acima pode também ser escrita para o instante :
N
i
ikik uhy1
ˆ (A4)
Subtraindo a equação (A4) da (A3) temos:
N
i
ikikikk uuhyy1
11ˆˆ (A5)
Definindo
1 kkk uuu (A6)
Substituindo (A5) em (A6), temos:
N
i
ikikk uhyy1
11ˆˆ (A7)
A equação (A7) fornece uma estimativa da saída do sistema no instante ( ) futuro,
a partir das variações nas entradas do sistema, até o instante . Se for o instante atual,
teremos uma estimativa futura em função de dados atuais e passados.
Para se obter uma estimativa mais precisa de 1ky ˆ , a equação (A7) deve ser
corrigida, por exemplo, com o erro no valor calculado de no instante :
kkkc yyyyk
ˆˆ 11
(A8)
Onde ky é o valor real medido
ky é o valor calculado no instante k
c1ky é a previsão corrigida no instante k+1
Consideremos agora o valor desejado para 1ky ˆ e vamos designá-lo de
d1ky . Em
geral ele pode estar relacionado com o setpoint dessa variável através de um filtro de primeira
ordem. A introdução desse filtro visa tornar as ações de controle mais suaves. No nosso caso
vamos desconsiderar esse filtro e adotar:
86
spk
d yyk
1 (A9)
Onde spk
y é o valor do setpoint.
No caso ideal, temos:
dc
kkyy
11
(A10)
Daí, substituindo as equações (A9) e (A10) em (A8), ficamos com:
kkspkkk eyyyy ˆˆ 1 (A11)
Onde é o desvio (erro) no instante .
Combinando as equações (A11) e (A8) obtemos:
k
N
i
iki euh
1
1 (A12)
Se é o instante atual, na equação (A12) apenas não conhecemos ku que contém a
ação de controle no instante . As demais ações de controle aconteceram no passado e são,
portanto, conhecidas. Então, resolvendo essa equação para o instante k, obtemos:
N
i
ikikk uheh
u2
1
1
1 (A13)
E podemos calcular :
1 kkk uuu (A14)
A equação (A13) define o controlador preditivo mais simples possível. Esse é o
chamado controlador dead-beat, onde o valor desejado é atingido apenas um período de
amostragem após a aplicação da ação de controle. Esse algoritmo de controle tem os seguintes
inconvenientes:
a) não é aplicável para processos com tempo morto, pois neste caso ;
b) não é aplicável se for pequeno (o que é muito freqüente), pois a ação de
controle seria muito grande;
c) é muito influenciado por ruídos espúrios.

87
Para melhorar a robustez e incorporar processos com tempo morto é necessário
considerar um número maior de instantes futuros (além do instante ). Desta forma, a
ação de controle é amenizada, pois o processo terá mais tempo para atingir o seu objetivo
(atingir o setpoint). Portanto a intervenção do controlador sobre o processo poderá ser mais
suave.
A equação (A7) é válida para qualquer instante futuro. Nesse caso, ficamos
com:
N
iijkijkjk uhyy
11ˆˆ
(A15)
Onde , sendo denominado de horizonte de otimização ou de
predição do controlador, podendo ser usado como um parâmetro de sintonia do controlador.
Vamos admitir agora, que o erro na predição feita pela equação (A15), seja o mesmo
para qualquer valor de . Também, vamos admitir que esse erro seja aquele observado no
instante . Isto equivale a impor que:
1jkc
1jkjkc
jk yyyy ˆˆ (A16)
e kck yy (A17)
Substituindo a equação (A16) em (A15) obtemos
N
1iijki
c1jk
cjk uhyy (A18)
Portanto para :
N
1ii1ki
ck
c1k uhyy (A19)
Usando a equação (A17) e abrindo a somatória, temos:
N1kN2k31k2k1kc
1k uhuhuhuhyy (A20)
Vamos definir :
N
2ii1ki1 uhS (A21)
88
Daí (A20) fica:
1k1kc
1k Suhyy (A22)
Observe que o valor de é conhecido, pois só depende das ações de controle
passadas.
Analogamente, aplicando a equação (A18) para , temos:
N
1ii2ki
c1k
c2k uhyy (A23)
Abrindo a somatória:
N2kN1k3k21k1c
1kc
2k uhuhuhuhyy (A24)
Definindo :
N
3ii2ki2 uhS (A25)
Obtemos:
2k21k1c
1kc
2k Suhuhyy (A26)
O valor de é conhecido, pois ele também só depende das ações de controle
passadas.
Substituindo a equação (A22) na equação (A26), segue:
y y h h u h u S Skc
k k k 2 1 2 1 1 1 2 (A27)
Analogamente, para obtemos:
y y h h h u h h u h u S S Skc
k k k k 3 1 2 3 1 2 1 1 2 1 2 3 (A28)
Onde:
N
4ii3ki3 uhS (A29)
89
Podemos assim definir:
N
1niinkin uhS (A30)
i
1nni SP (A31)
i
1jji ha (A32)
E as equações (A22), (A27) e (A28) podem ser escritas da seguinte maneira:
1k1kc
1k Puayy (A33)
21k1k2kc
2k Puauayy (A34)
32k11k2k3kc
3k Puauauayy (A35)
Assim, por indução podemos generalizar para qualquer e obter:
j1jk11k1jkjkc
jk Puauauayy (A36)
Considerando todos instantes de predição, temos:
npk
npk
k
k
npk
npk
k
k
npnp
npnp
cnpk
cnpk
ck
ck
Py
Py
Py
Py
u
u
u
u
aaaa
aaa
aa
a
y
y
y
y
1
2
1
1
2
1
121
121
12
1
1
2
1
0
000
0000
Ou
PyuAy kc (A37)
Onde:
cy vetor dos valores previstos de y
matriz dinâmica
u vetor das ações de controle no instante k (será calculado)

90
vetor de predições decorrentes das ações de controle passadas
Suponhamos que a trajetória desejada seja dada por:
spk
djk yy (A38)
Escrevendo (A27) para todos os instantes futuros:
spk
spk
spk
spk
dnpk
d1npk
d2k
d1k
y
y
y
y
y
y
y
y
(A39)
Subtraindo a equação (A39) pela (A37), obtemos:
npk
npk
k
k
npk
npk
k
k
npnp
npnp
cnpk
dnpk
cnpk
dnpk
ck
dk
ck
dk
Pe
Pe
Pe
Pe
u
u
u
u
aaaa
aaa
aa
a
yy
yy
yy
yy
1
2
1
1
2
1
121
121
12
1
11
22
11
0
000
0000
(A40)
Onde
kspkk yye (A41)
Ou em uma notação vetorial, a equação (A40) fica:
´euAe (A42)
Onde
- é o vetor de erros entre os valores previstos e o valor desejado.
- é o vetor de erros entre o valor desejado e os valores previstos se não houver
nenhuma ação de controle futura (sistema em malha aberta).
Podemos desejar que o valor calculado para y seja igual à trajetória desejada, portanto
np21jyy cjk
djk ...,,,, (A43)
Ou seja:

91
´´ eAu0euA0e 1 (A44)
Porém as dimensões das matrizes e vetores ) da equação
(A44), podem tornar complicada a manipulação computacional das mesmas. Também a
matriz A pode ser singular (não tem inversa) no caso em que o sistema tem tempo morto. Para
contornar esses problemas consideramos apenas os m primeiros elementos do vetor
assumindo que os demais valores desse vetor sejam nulos. Deste modo a equação (A40)
é escrita da seguinte forma:
npk
mk
mk
k
k
mk
k
k
mnpmnpnpnp
mm
mm
cnpk
dnpk
cmk
dmk
cmk
dmk
ck
dk
ck
dk
Pe
Pe
Pe
Pe
Pe
u
u
u
aaaaa
aaaa
aaa
aa
a
yy
yy
yy
yy
yy
1
2
1
1
1
111
121
11
12
1
11
22
11
0
00
0
000
0000
(A45)
Ou na forma vetorial:
1xnp1xmmxnp1xnp euAe ´ (A46)
Seguindo este procedimento o controlador estará calculando sua saída em m instantes
futuros, ou seja, do instante atual ( ) até o instante ( 1mku ).
Para calcular as ações de controle futuras, o MPC minimiza o erro entre as
trajetórias prevista e desejada, ou seja, ele minimiza o seguinte índice de desempenho:
´ euAeuAeeJ TT (A47)
Queremos então encontrar as ações de controle que minimizem , isto é:
0eAuAA0u
JJ TT
´min
Portanto:
´eAAAu T1T (A48)

92
Ou explicitando as dimensões dos vetores e matrizes envolvidos na equação acima,
temos:
1xnpnpxmT1
mxnpnpxmT
1xm eAAAu ´
(A49)
A equação (A48) determina as futuras ações de controle (vetor u ), porém apenas
a ação do instante será implementada. No instante seguinte , repetimos todo o
processo, fazendo este instante assumir a posição k e calculando tudo novamente. Com este
procedimento, apenas precisamos multiplicar a primeira linha da matriz T1T AAA
pelo
vetor .
Os parâmetros de sintonia do MPC introduzidos até agora são:
- horizonte de convolução ou de estabilização do processo
- horizonte de predição ou otimização
- horizonte de controle
A implementação do índice de desempenho definido na equação (A42), conduz a uma
ação de controle muito violenta. Para atenuar este comportamento é acrescentado um peso na
variação da ação de controle conforme a seguinte equação:
(A50)
Onde é a matriz de fatores de supressão que pondera (atenua) as variações das
ações de controle, é normalmente uma matriz diagonal com todos os valores constantes e
iguais. Quanto maior o valor de , mais suave à ação de controle resultante. Esta matriz é
outro parâmetro de sintonia do controlador.
Daí o índice de desempenho definido em (A47), resulta em:
(A51)
Além disso, existem variáveis controladas que são mais importantes que outras, i.e.
existem variáveis que devem seguir o setpoint com maior fidelidade, enquanto que outras
podem oscilar em torno do valor desejado. Nesse caso é necessário ponderar diferentemente a

93
influência das variáveis controladas na função objetivo. Para implementar tal efeito, basta pré-
multiplicar a equação (A42) por uma matriz diagonal de ponderação cujos valores da
diagonal principal são proporcionais à importância da variável controlada:
´We WA u We (A52)
Neste caso, queremos minimizar os quadrados dos erros ponderados, portanto obtemos
uma expressão análoga à equação (A51):
(A53)
Que é a expressão mais usual para o controlador DMC sem restrições nas variáveis
manipuladas.









![gradiente, divergência e rotacional (revisitados)P26... · [GRADIENTE, DIVERGÊNCIA E ROTACIONAL (REVISITADOS)] Página 1 ... do campo eléctrico em regime não -estacionár io (regulado](https://img.document.onl/doc/110x75/5aebf1c27f8b9ac3618fda70/gradiente-divergncia-e-rotacional-revisitados-p26gradiente-divergncia-e.jpg)