Embed Size (px)
Citation preview

Programação
Não Linear Restrita
EA 044 Planejamento e Análise
de Sistemas de Produção
DCA-FEEC-Unicamp

2
Tópicos
1-Introdução
2-Modelos convexos
3-Método dos multiplicadores de Lagrange
4-Condições de Karush-Kuhn-Tucker
DCA-FEEC-Unicamp

3
DCA-FEEC-Unicamp
max (min) f (x)
sa x∈D ⊂ Rn
� Modelos de programação não linear
max (min) f (x)
sa x∈D = Rn
restritos
irrestritos
1-Introdução
4
DCA-FEEC-Unicamp
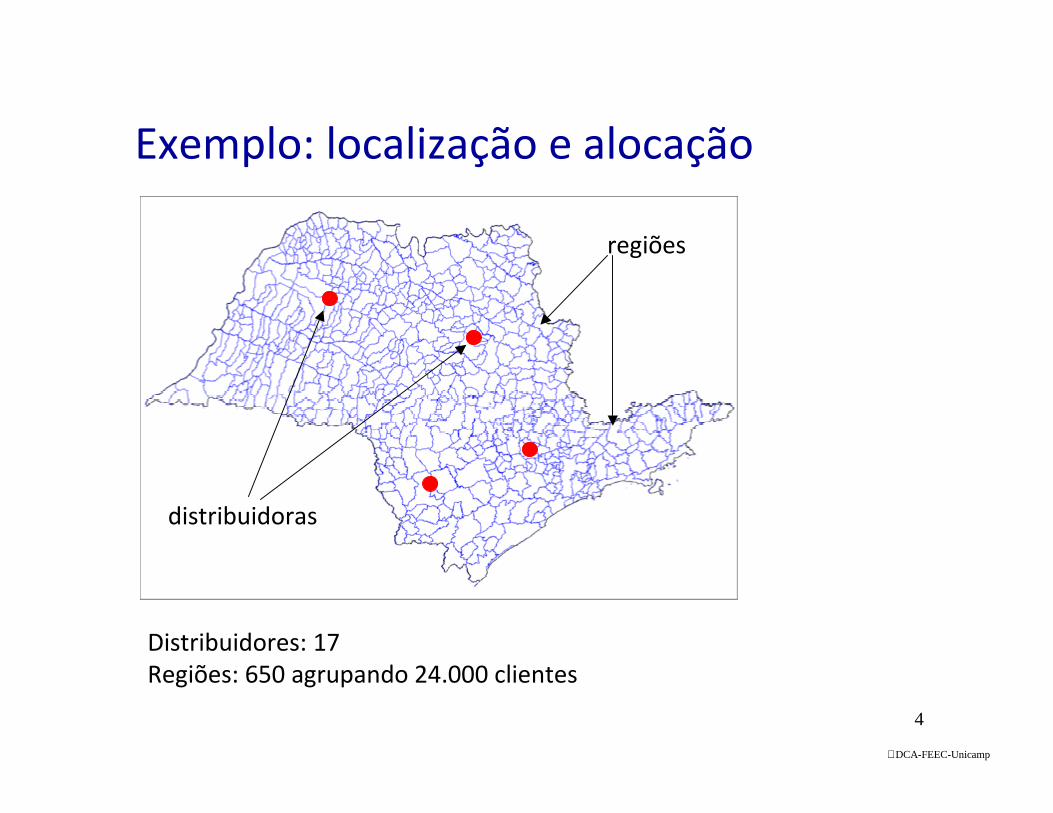
Exemplo: localização e alocação
regiões
distribuidoras
Distribuidores: 17
Regiões: 650 agrupando 24.000 clientes

5
DCA-FEEC-Unicamp
i = distribuidor, i = 1,....,17
j = região, j = 1,...,650
j
hj
kj
i
xi
yj
dj = número de viagens por ano para entregas à j-ésima região

6
DCA-FEEC-Unicamp
650,,1;17,,11,0
650,,1,sa
)()(min
17
1
17
1
650
1
22
KK
K
==≥
==
−+−
∑
∑∑
=
= =
jw
jdw
hyhxw
ij
ijij
i jjijiij
� Ideia: minimizar custo de transporte
– minimizar número de viagens (wij) de i → j
– minimizar distância entre i e j
modelo PNL

7
2-Modelos convexos
DCA-FEEC-Unicamp
Kkcl
Jjbh
Iiag
f
kk
jj
ii
,,1,)x(
,,1,)x(
,,1,)x(sa
)x(min
K
K
K
==
=≤=≥
f(x) convexa, gi(x) côncava ∀i, hj(x) convexa ∀j, lk(x) linear ∀k

8
min ( x1– 3)2 + ( x2 – 3)2
sa 3 x1 + 5 x2 ≤ 155 x1 + 2 x2 ≤ 10
x1, x2 ≥ 0
Exemplo
x1
x2
x*y*
f(x)
h1(x)
h2(x)
3
3
1
1
5
DCA-FEEC-Unicamp

9
DCA-FEEC-Unicamp
Kkcl
Jjbh
Iiag
f
kk
jj
ii
,,1,)x(
,,1,)x(
,,1,)x(sa
)x(max
K
K
K
==
=≤=≥
f(x) côncava, gi(x) côncava ∀i, hj(x) convexa ∀j, lk(x) linear ∀k

10
max 3 w1 – w2 + 8 ln w1
sa 4 w12 – w1 w2 + w2
2 ≤ 100
w1 + w2 = 4
w1, w2 ≥ 0
Exemplo
DCA-FEEC-Unicamp

11
0.5 1 1.5 2 2.5 3 3.5 4
0.5
1
1.5
2
2.5
3
3.5
4
w1
w2
Função objetivo
f(w1, w2) = 3 w1 – w2 +8 ln w1
DCA-FEEC-Unicamp

12
Restrições principais
0.5 1 1.5 2 2.5 3 3.5 4
0.5
1
1.5
2
2.5
3
3.5
4
w1
w2
h(w1, w2) = 4 w12 – w1 w2 + w2
2 ≤ 100
DCA-FEEC-Unicamp
13
130.5 1 1.5 2 2.5 3 3.5 4
0.5
1
1.5
2
2.5
3
3.5
4
w1
w2
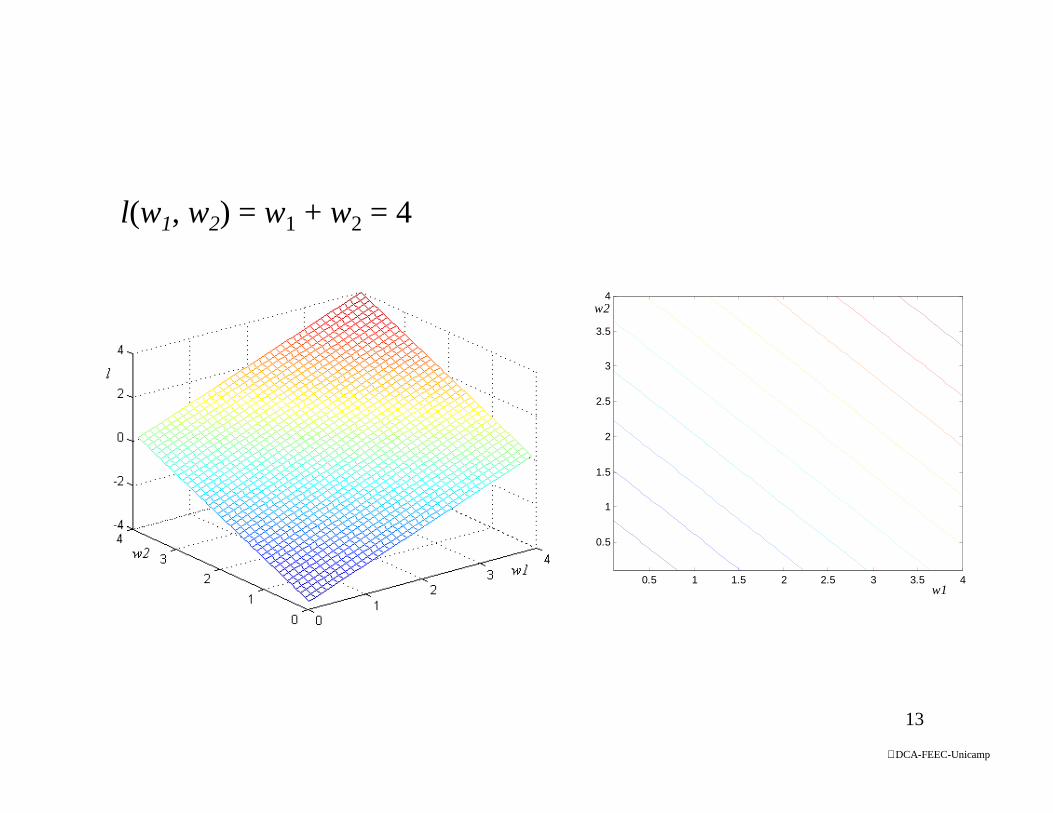
l(w1, w2) = w1 + w2 = 4
DCA-FEEC-Unicamp
140 1 2 3 4 5 6
0
0.5
1
1.5
2
2.5
3
3.5
4
w1
w2
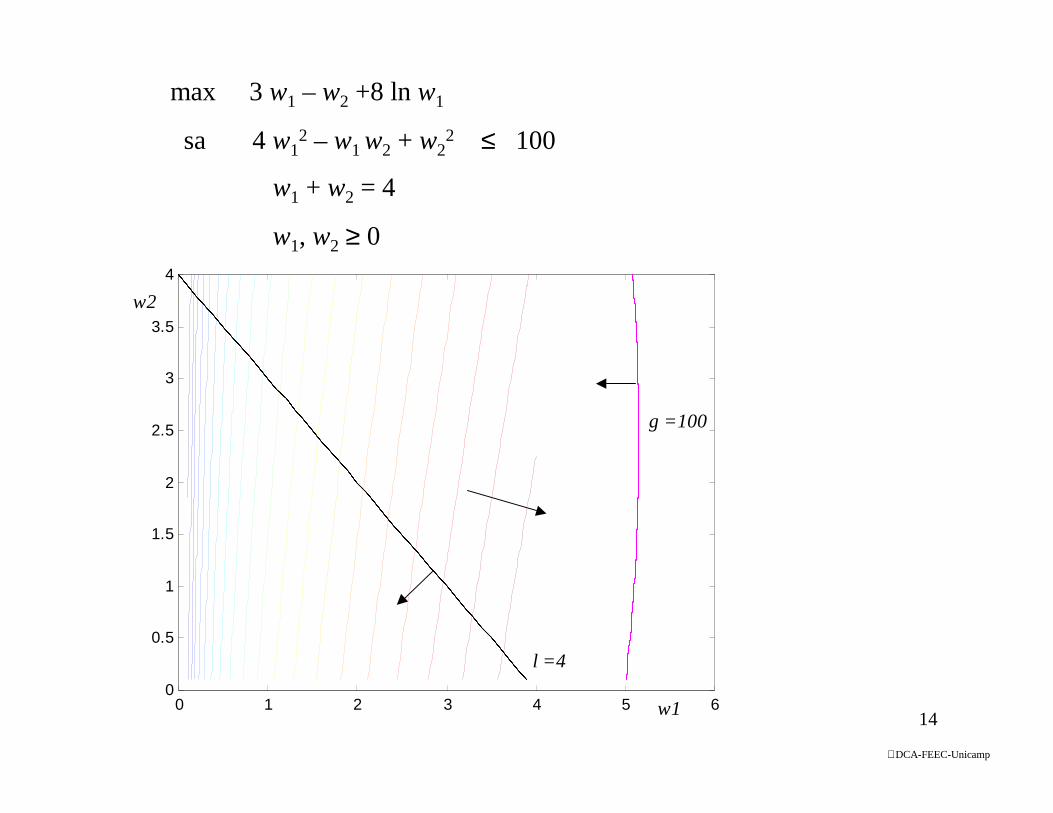
l =4
g =100
max 3 w1 – w2 +8 ln w1
sa 4 w12 – w1 w2 + w2
2 ≤ 100
w1 + w2 = 4
w1, w2 ≥ 0
DCA-FEEC-Unicamp

15
Modelos separáveis
� Função f(x1,...,xn) separável se ∑=
=n
jjjn xfxxf
11 )(),,( K
� Modelo separável
Kkcl
Jjbh
Iiag
f
kk
jj
ii
,,1,)x(
,,1,)x(
,,1,)x(sa
)x(max
K
K
K
==
=≤=≥
f, gi, hj, lk são funções separáveis
DCA-FEEC-Unicamp

16
DCA-FEEC-Unicamp
Propriedade de modelos convexos
Se a função objetivo do modelo é convexa e as restrições
produzem um conjunto convexo factível, então toda solução
ótima local é uma solução ótima global.
gi(x) côncava ∀i
hj(x) convexa ∀j
lk(x) linear ∀k
conjunto convexo
f convexa (côncava) função unimodal

17
DCA-FEEC-Unicamp
3-Método dos multiplicadores de Lagrange
mi
bg
f
ii
,,1
)x(sa
)x(min(max)
K== restrições ativas
função Lagrangeana∑ −ν+=ν=
m
iiii gbfL
1)]x([)x()x,(
vi = multiplicador de Lagrange associado à restrição i

18
DCA-FEEC-Unicamp
Pontos estacionários da função Lagrangeana
ibg
jx
fv
x
ggf
ii
j
m
ii
j
im
iii
∀=
∀∂∂=∑
∂∂→∑ ∇ν=∇
==
,*)x(
,)]x*()x*(11
*
(x* , v*) é um ponto estacionário de L(x,v) se ∇L(x*,v*) = 0
Se (x* , v*) é um ponto estacionário de L(x,v) e x* é uma solução ótima
irrestrita de L(x,v), então x* é uma solução ótima do modelo com
restrições de igualdade correspondente.

19
DCA-FEEC-Unicamp
Exemplo
)1,0,0()x(
)0,24,24()x(
)2,8,12()x(
]1[]2424360[46),x(
1
3602424sa
46min
2
1
321
3221123
22
21
3
21
23
22
21
=∇=∇=∇
−+−−+++=
==+++
g
g
xxxf
xvxxvxxxvL
x
xx
xxx
20
DCA-FEEC-Unicamp
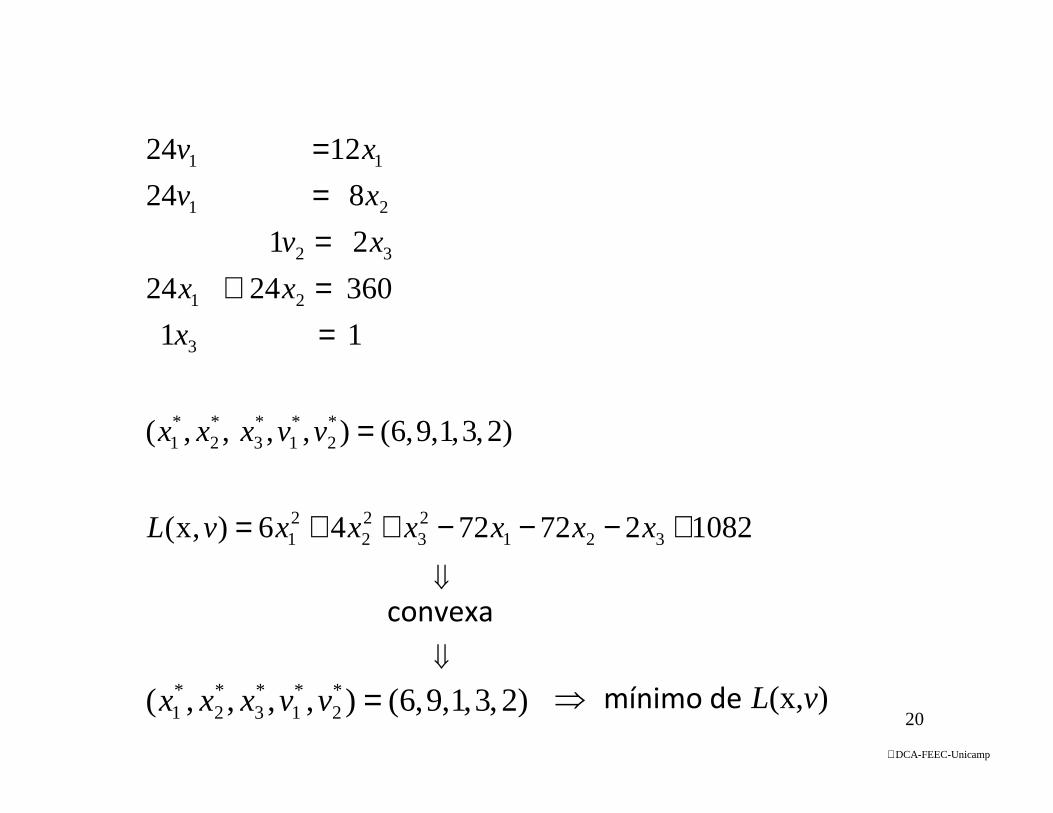
10822727246),x(
)2,3,1,9,6(),,,,(
11
3602424
21
824
1224
32123
22
21
*2
*1
*3
*2
*1
3
21
32
21
11
+−−−++=
=
==+===
xxxxxxvL
vvxxx
x
xx
xv
xv
xv
convexa
)2,3,1,9,6(),,,,( *2
*1
*3
*2
*1 =vvxxx ⇒ mínimo de L(x,v)
⇓
⇓

21
Multiplicadores de Lagrange: interpretação
DCA-FEEC-Unicamp
vi = variação valor ótimo f quando bi aumenta de uma unidade
vi = variável dual
ii b
Lv
∂∂=*
� Limitações
– condições de estacionariedade difíceis de resolver
– restrições de desigualdade aumenta a complexidade
– soluções ótimas globais somente para modelos tratáveis

22
DCA-FEEC-Unicamp
4-Condições de Karush-Kuhn-Tucker
� Forma geral PNL diferenciáveis
Eibg
Libg
Gibg
f
ii
ii
ii
∈∀=∈∀≤∈∀≥
,(x)
,(x)
,(x) sa
(x)min(max)
f, gi : funções diferenciáveis
G, L, E : conjuntos de índices
23
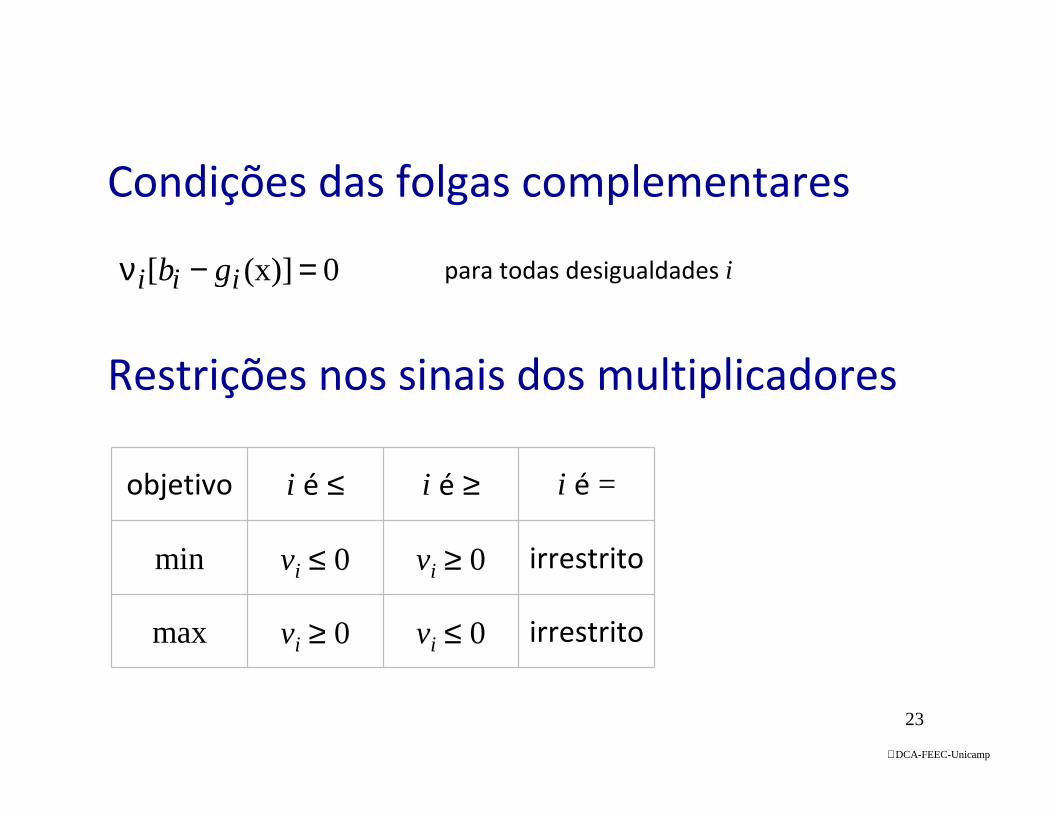
Condições das folgas complementares
0(x)][ =−ν iii gb para todas desigualdades i
Restrições nos sinais dos multiplicadores
objetivo i é ≤ i é ≥ i é =
min vi ≤ 0 vi ≥ 0 irrestrito
max vi ≥ 0 vi ≤ 0 irrestrito
DCA-FEEC-Unicamp

24
Condições de Karush-Kuhn-Tucker
Soluções (x, v) satisfazem as condições de KKT se
1. f, gi são funções diferenciáveis
2. condições das folgas complementares
3. restrições no sinais dos multiplicadores
4. restrições primais
5. equação dos gradientes
Ponto de KKT: qualquer x para o qual existe um v que satisfaça
as condições de KKT
∑ ∇=∇i
ii fvg (x)(x)
DCA-FEEC-Unicamp
25
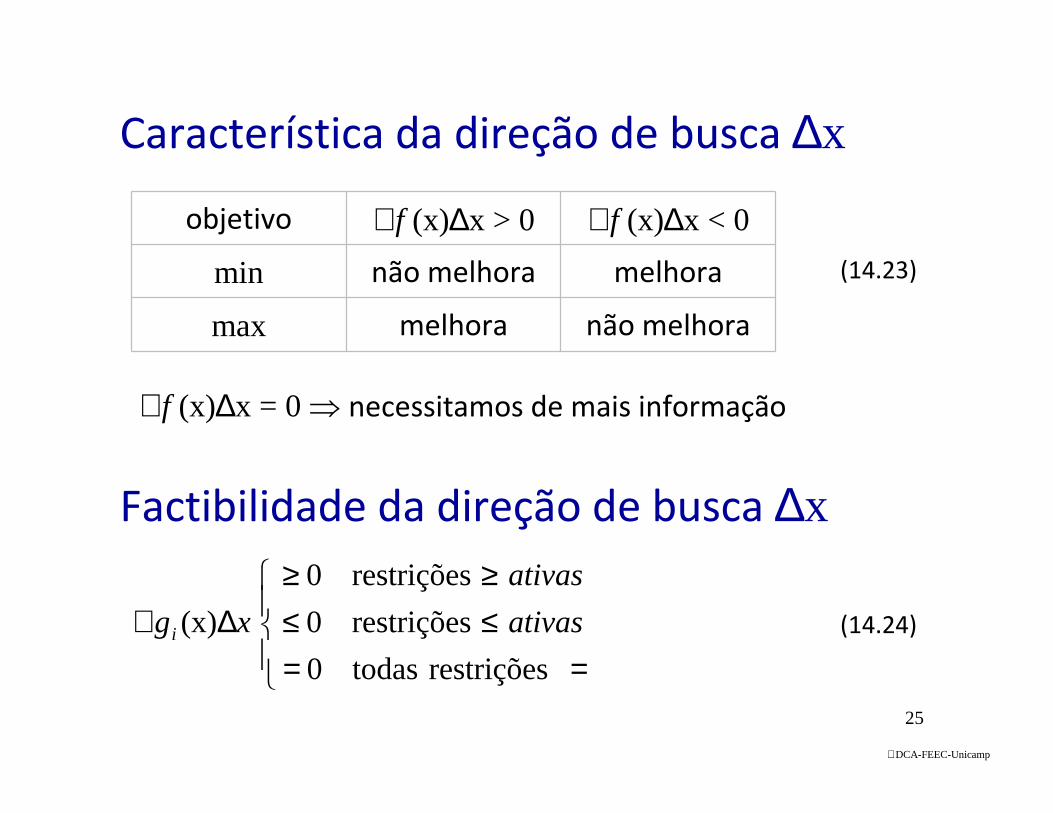
objetivo ∇f (x)∆x > 0 ∇f (x)∆x < 0
min não melhora melhora
max melhora não melhora
∇f (x)∆x = 0 ⇒ necessitamos de mais informação
Característica da direção de busca ∆x
Factibilidade da direção de busca ∆x
==≤≤≥≥
∆∇restriçõestodas0
restrições0
restrições0
(x) ativas
ativas
xgi
(14.23)
(14.24)
DCA-FEEC-Unicamp

26
� As condições de KKT fornecem um teste de primeira ordem para
determinar a ausência de direções factíveis que melhoram o valor
da função objetivo
� Isto é, x é um ponto de KKT se e somente se não existe uma direção
∆x em x que satisfaz as condições de primeira ordem (14.23) e (14.24)
⇓
� Condições KKT são suficientes para ótimo local: x ponto KKT ⇒ x ótimo local
� PNL convexo ⇒ condições de KKT são suficientes para ótimo global
Condições suficientes de KKT
DCA-FEEC-Unicamp

27
� Necessidade: se x é uma solução ótima, então x satisfaz KKT
� Solução ótima local é um ponto de KKT se
– todas as restrições são lineares
– os gradientes de todas as restrições ativas no ponto ótimo local
são linearmente independentes (qualificação de restrição)
Condições necessárias de KKT
DCA-FEEC-Unicamp
28
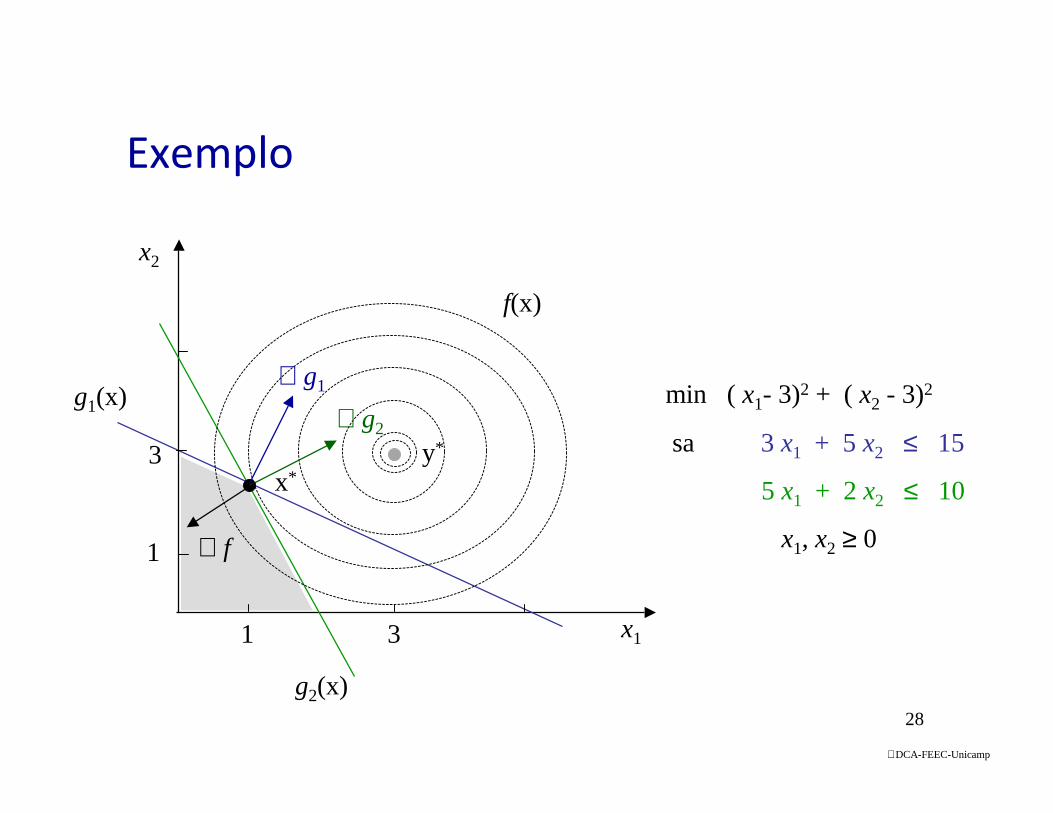
x1
x2
x*y*
f(x)
g1(x)
g2(x)
3
3
1
1 ∇ f
∇ g1
∇ g2
min ( x1- 3)2 + ( x2 - 3)2
sa 3 x1 + 5 x2 ≤ 15
5 x1 + 2 x2 ≤ 10
x1, x2 ≥ 0
Exemplo
DCA-FEEC-Unicamp

29
min x12 + 4x2
sa ( x1 − 1)2 + x22 ≤ 1
( x1+ 1)2 + x22 ≤ 1
x1
x2
x*
f(x)
g1(x)g2(x)3
3
1
1
∇ f
∇ g1 ∇ g2
Exemplo
DCA-FEEC-Unicamp

30
DCA-FEEC-UnicampProfFernandoGomide
Este material refere-se às notas de aula do curso EA 044 Planejamento e
Análise de Sistemas de Produção da Faculdade de Engenharia Elétrica e de
Computação da Unicamp. Não substitui o livro texto, as referências
recomendadas e nem as aulas expositivas. Este material não pode ser
reproduzido sem autorização prévia dos autores. Quando autorizado, seu
uso é exclusivo para atividades de ensino e pesquisa em instituições sem
fins lucrativos.
Observação





























