Upload
chnandu
View
450
Download
5
Embed Size (px)
Citation preview
&RQWURODGRU GH 5RE{ .DZDVDNL 6pULH '
0DQXDO ,2 H[WHUQRV
Kawasaki Heavy Industries, Ltd.
90204 1021DPA
Controlador Srie D Rob Kawasaki Manual I/O externos 35()&,2 Este manual descreve os sinais externos de input e output para os controladores da srie D dos robs Kawasaki. Este manual tambm descreve os procedimentos para ligar o Controlador e os aparelhos perifricos. Para a utilizao bsica e as advertncias especficas do rob necessrio consultar o Manual Operacional. Leia com muita ateno este manual e efetue as operaes com o mximo cuidado. [ 127$ ] Este manual descreve os seguintes modelos de Rob: D40, D42, D43, D44
1. Este manual no constitui garantia para os sistemas nos quais o rob utilizado. Portanto Kawasaki no responsvel por acidentes, danificaes ou por qualquer tipo de problema que venha a ocorrer utilizando o rob com prejuzo da propriedade da instalao industrial. 2. Antes de comear a utilizar o rob o pessoal empregado no incio das operaes, na programao, na manuteno e/ou no controle do rob, deve participar nos relativos cursos de formao organizados por Kawasaki. 3. Kawasaki reserva-se o direito de modificar, revisar, atualizar este manual sem aviso prvio. 4. Este manual (no todo ou em parte) no pode ser copiado ou reimprimido sem aprovao escrita de Kawasaki. 5. Guarde cuidadosamente este manual de forma a poder consult-lo rapidamente em qualquer ocasio. No caso de perder o manual ou de este sofrer graves estragos, contate o seu agente Kawasaki. 6. Embora este manual tenha sido preparado de forma a ser o mais exaustivo e preciso possvel, os autores desculpam-se por eventuais informaes erradas ou incompletas. All rights reserved. Copyright 2002 by Kawasaki Heavy Industries Ltd.
i
Controlador Srie D Rob Kawasaki Manual I/O externos 60%2/26 Neste manual, as informaes que exigem uma ateno especial so indicadas atravs dos seguintes smbolos. Para uma utilizao correta e segura do rob e prevenir danos fsicos ou propriedade observe as regras de segurana indicadas nas caixas caracterizadas pelos diferentes smbolos. 3(5,*2 $ QmR REVHUYkQFLD GD DGYHUWrQFLD DTXL LQGLFDGD LPSOLFDUi XP SHULJR GLUHWR GH LQIRUW~QLR PHVPR PRUWDO
$'9(571&,$ $ $ QmR REVHUYkQFLD GD DGYHUWrQFLD DTXL LQGLFDGD SRGHULD FDXVDU XPD OHVmR ItVLFD PHVPR PRUWDO &8,'$'2 $ QmR REVHUYkQFLD GDV LQGLFDo}HV DTXL UHIHULGDV SRGHULD FDXVDU XP DFLGHQWH ItVLFR RX XP GDQR PHFkQLFR [ 127$ ] Indica precaues relativas s caractersticas do rob, programao, movimentao, operaes, manuteno.
ii
Controlador Srie D Rob Kawasaki Manual I/O externos 127$6 '( $35(6(17$d2 7(&/$6 ( 6:,7&+(6 +$5':$5( O Controlador da srie D tem teclas e switches no painel operacional e na unidade porttil de programao que servem para vrias operaes. As teclas e as switches hardware so apresentadas neste manual com seus nomes contornados por , como nos exemplos que se seguem. As palavras tecla ou switch que deveriam preceder sempre o nome da funo que desenvolvem, por razes de simplificao, muitas vezes so omitidas. Quando se pressionam duas ou mais teclas contemporaneamente, as teclas so indicadas com um sinal + como no exemplo a seguir. (;(03/26 SELECT : indica a tecla hardware SELECT. A + MENU : indica que se pressiona e se mantm pressionado A e em seguida se pressiona MENU. 7(&/$6 ( 6:,7&+(6 62)7:$5( O Controlador da srie D tem teclas e switches software que aparecem na tela da unidade de programao para as vrias operaes segundo as caractersticas e situaes. As teclas e as switches software so apresentadas no manual com seus nomes entre parntesis como estas: < >. As palavras tecla ou switch que deveriam preceder o nome verdadeiro da funo que desenvolvem, por razes de simplificao, muitas vezes so omitidas. (;(03/26 : indica a tecla ENTER que aparece na tela da unidade porttil. : indica a tecla NEXT PAGE na tela da unidade porttil. 6(/(d2 '26 2%-(726 Muitas vezes um objeto deve ser selecionado de um menu drop-down na tela da unidade porttil. Esses objetos so apresentados no manual com seus nomes entre parntesis como estas: [XXX]. (;(03/26 [BASIC SETTING] : indica o objeto BASIC SETTING num menu; para selecion-lo necessrio pressionar a tecla SELECT depois de ter deslocado o cursor nesse objeto utilizando a tecla de seta. Para uma descrio mais detalhada, se deveria, em cada ocorrncia, descrever todo esse procedimento; mas por razes de simplificao, ser usado selecione o objeto [XXX].iii
Controlador Srie D Rob Kawasaki Manual I/O externos
SUMRIO1.0 1.1 1.2 1.2.1 1.2.2 1.2.3 1.2.4 1.2.5 1.2.6 1.3 2.0 2.1 2.2 2.2.1 2.2.2 2.3 2.3.1 2.3.2 2.3.2.1 2.3.2.2 3.0 3.1 3.1.1 3.1.2 3.1.3 3.1.3.1 3.1.3.2 3.1.3.3 3.1.4 3.1.5 3.1.6 3.2 3.2.1 3.2.2 Segurana.................................................................................................................... 1 Precaues gerais de segurana.. ................................................................................ 1 Segurana em cada processo de trabalho ................................................................... 4 Segurana antes de iniciar o rob ............................................................................... 4 Segurana durante a ativao do rob ...................................................................... 4 Segurana durante a programao.............................................................................. 5 Segurana durante o ciclo automtico ........................................................................ 6 Segurana durante a deteco de falhas.................................................................... 6 Segurana durante o controle e a manuteno............................................................ 8 Dispositivos de segurana dos rob Kawasaki ..................................................... 10 Tipos de sinais I/O externos...................................................................................... 11 Sinais dedicados ao hardware ................................................................................. 12 Sinais dedicados ao software .................................................................................. 14 Sinais de input dedicados ao software ...................................................................... 15 Sinais de output dedicados ao software .................................................................. 17 Sinais I/O genricos .................................................................................................. 18 Tipos de sinais genricos .......................................................................................... 18 Temporizao I/O dos sinais genricos .................................................................... 19 Temporizao atravs de auto-aprendizagem........................................................... 19 Temporizao atravs de programao AS .............................................................. 20 Condies de conexo dos sinais I/O externos .......................................................... 22 Sinais dedicados ao hardware ................................................................................. 22 Alimentao externa de controle ON/OFF............................................................... 22 Alimentao externa do motor em ON..................................................................... 24 Circuito de segurana em OFF ................................................................................. 24 Parada de emergncia externa................................................................................... 25 Input das protees de segurana.............................................................................. 28 Input do boto trigger externo................................................................................... 29 Sinal de HOLD externo ............................................................................................ 30 Output teach/repeat ................................................................................................... 31 Output de presena de erro ....................................................................................... 31 Sinais I/O genricos .................................................................................................. 32 Sinais de input externos (Externo Rob) ............................................................. 32 Sinais de output externos (Rob Externo) ........................................................... 34iv
Controlador Srie D Rob Kawasaki Manual I/O externos 4.0 4.1 4.2 Procedimentos para a conexo dos sinais I/O externos ............................................ 37 Conexo dos sinais dedicados ao hardware.............................................................. 38 Conexo dos sinais genricos ................................................................................... 38
Apndice 1.0 Procedimentos para parar o rob ................................................................... A-1 Apndice 1.1 Alimentao externa do motor em OFF ........................................................ A-1 Apndice 1.2 HOLD externo ............................................................................................... A-1 Apndice 2.0 Funo de seleo do programa externo........................................................ A-2 Apndice 2.1 Utilizao da instruo IF para mudar de programa...................................... A-3 Apndice 2.2 Utilizao da funo RPS para mudar de programa...................................... A-4 Apndice 2.3 Utilizao da funo JUMP para mudar de programa................................... A-6 Apndice 3.0 Funo de emisso do sinal de posio HOME............................................. A-9 Apndice 4.0 Bloqueio interno recproco........................................................................... A-10 Apndice 5.0 Temporizao dos sinais de bloqueio (Aplicativo de manipulao) ........... A-12 Apndice 6.0 Sinais dedicados por tipo de aplicativo........................................................ A-14 Apndice 6.1 Definio dos jumpers ............................................................................... A-14 Apndice 6.2 Manipulao............................................................................................... A-15 Apndice 6.3 Caratersticas da solda por pontos para a pina pneumtica........................ A-18 Apndice 6.4 Caratersticas da solda a arco ....................................................................... A-25 Apndice 7.0 Atribuio dos pinos de sinal I/O externo.................................................. A-34 Apndice 7.1 Placa 1GW/1HW ......................................................................................... A-34 Apndice 7.2 Atribuio dos pinos na placa 1KP do sinal dedicado ao hardware ......... .. A-36 Apndice 8.0 Lista de atribuio dos sinais genricos ..................................................... A-37 ndex ...................................................................................................................... I-1
v
Controlador Srie D Rob Kawasaki Manual I/O externos 0(02
vi
Controlador Srie D Rob Kawasaki Manual I/O externos 6(*85$1d$
1. Segurana
Como estabelecido pela regulamentao local e nacional, as disposies de segurana so parte fundamental dos sistemas industriais que utilizam robs. Em caso de acidentes a pessoas ou danos fsicos resultantes do uso de rob, ser considerado responsvel o estabelecimento utilizador. Portanto fundamental adquirir um conhecimento completo das leis e das normas relativas sade e segurana de este manual e dos textos com ele relacionados e essencial o cumprimento dos seus contedos. As informaes relativas segurana, referidas a seguir, so precaues de carter geral para o bom uso dos robs e no se referem aos variados sistemas nos quais os rob so utilizados. Para usar os robs, portanto, necessrio predispor medidas de segurana adequadas a cada sistema e ambiente de trabalho alm de obedecer rigorosamente a essas medidas. 35(&$8d(6 *(5$,6 '( 6(*85$1d$ A seguir so indicadas as precaues gerais relativas ao uso seguro do rob. 1. Efetuar a programao e a manuteno em conformidade com as leis e as normas relativas. 127$ ISO 10218 Robs industriais de manipulao - Segurana 2. Ler com muita ateno, e compreender, o Manual de Segurana, em volume separado, e obedecer aos seus contedos. 3. Todo o pessoal ocupado no funcionamento, na programao, na manuteno e/ou no controle do rob, deve completar o curso ou os cursos de formao da Kawasaki pertinente(s) funo desempenhada. Para informaes relativas aos cursos de formao, contate os centros de Kawasaki Machine Systems listados na parte posterior da capa. 4. O pessoal operativo do estabelecimento predispor e cumprir as normas de segurana fixando as mesmas em funo das disposies para garantir a segurana no trabalho. 5. O pessoal operativo do estabelecimento nomear um operador a tempo inteiro e um supervisor de segurana que devero produzir as normas de segurana relativas a todas as operaes, incluindo a formao na segurana.
Controlador Srie D 1. Segurana Rob Kawasaki Manual I/O externos 6. Para evitar qualquer acidente causado usando o rob, o supervisor dever predispor e respeitar as seguintes medidas de proteo em conformidade com as condies de segurana de instalao de cada rob: (1) Posicionar sempre o rob dentro das protees de segurana previstas (sinais de aviso, protees perimetrais, aparelhos vrios etc.) para prevenir eventuais acidentes (de agora em diante: protees de segurana) de maneira a que o brao do rob esteja dentro da zona protegida. Instalar tambm uma parada de emergncia numa zona facilmente acessvel. (2) A zona protegida (rea cercada por protees perimetrais) deve ser realizada de maneira a que, em caso de avaria e/ou erro, o rob no possa ultrapassar ou estender-se fora de seu raio de ao. (3) Limitar o nmero das portas das protees perimetrais (de preferncia apenas uma). A porta ser fornecida de pino de segurana que dever ser retirado manualmente para abrir ou fechar a porta. O circuito de segurana da porta dever ser realizado de maneira a que, ao retirar o pino de segurana durante o ciclo automtico, a alimentao do motor se interrompa automaticamente. Para entrar dentro das protees perimetrais, o operador deve posicionar o boto WHDFK da unidade porttil de programao em ON para que ningum possa selecionar o ciclo automtico. O operador dever guardar consigo o pino de segurana. (4) Expor de maneira clara a modalidade operacional do rob (por exemplo, ciclo automtico, programao, parada de emergncia etc.) de forma a que a condio operacional atual do rob possa ser vista por qualquer pessoa. (5) Preparar os processos de segurana conforme a definio atual da linha e dos aparelhos perifricos. (6) Dever ser fornecida uma preparao adequada a todo o pessoal ocupado no funcionamento, na programao, no controle e na reparao do rob. Ao pessoal tambm dever ser oferecida uma adequada preparao que lhe permita adquirir competncia e percia nos processos de trabalho, inclusive todas as medidas que garantam a segurana. (7) Todo o pessoal que opera com os robs deve ter seguido e completado os cursos de formao aprovados por Kawasaki. 7. No utilizar o rob fora de suas prprias especificaes (carga, operao, raio de ao, ambiente). Assegurar-se sempre que no tem perigos antes de iniciar ou reiniciar o rob. O rob pode deslocar-se dentro de uma vasta rea com uma grande variedade de tipos de movimento. Tomar as devidas precaues para evitar que o elemento segurado pela garra
8. 9.
Controlador Srie D 1. Segurana Rob Kawasaki Manual I/O externos do rob seja lanado e para impedir qualquer contato ou choque entre o brao do rob e os aparelhos perifricos. Tambm necessrio verificar que no tem zonas em que o pessoal possa ser esmagado por partes fixas ou mveis dos aparelhos. 10. Adquirir informaes sobre o raio de ao do rob e os aparelhos perifricos e predispor uma sada de emergncia para o pessoal operativo em caso de movimento anmalo do rob. 11. No ligar/desligar as conexes eltricas das placas, dos conectores, etc. enquanto a alimentao do rob estiver ativada. 12. Evitar qualquer choque da unidade porttil de programao sendo esta composta de instrumentos de preciso. 13. Se no brao do rob estiver uma etiqueta de sinal de aviso, observar as instrues de segurana e proteger a etiqueta contra eventuais danos e sujeira. No caso de a etiqueta perder a legibilidade, consulte os centros Kawasaki. 14. Evitar o uso de objetos e roupa solta, gravatas, echarpes, relgios e jias. 15. Usar equipamento especfico de proteo, capacete, culos e sapatos de segurana. 16. Verificar a posio e o funcionamento dos botes de parada de emergncia. No desativar, mecnica ou eletricamente, nenhum dispositivo de segurana. 17. No caso de o pessoal atuar em condies de segurana inadequadas, referir imediatamente ao supervisor ou ao coordenador da segurana do estabelecimento e tomar as medidas de correo adequadas.
(VWH PDQXDO GHVFUHYH H[FOXVLYDPHQWH DVSHFWRV UHODWLYRV j VHJXUDQoD GD XQLGDGH SULQFLSDO GR URE{ H QmR SUHWHQGH GHVFUHYHU D VHJXUDQoD UHODWLYD DR LQWHLUR VLVWHPD RX D FDGD XP GRV VLVWHPDV HVSHFtILFRV HP TXH R URE{ p XWLOL]DGR $QWHV GH LQLFLDU D XVDU R URE{ SRUWDQWR p QHFHVViULR OHU FRP DWHQomR H FRPSUHHQGHU WRGDV DV OHLV H QRUPDV SHUWLQHQWHV RV PDQXDLV GH XVR H RV UHODWLYRV PDWHULDLV H SUHGLVSRU DV PHGLGDV GH VHJXUDQoD DGHTXDGDV D FDGD VLVWHPD H DPELHQWH
PERIGO
Controlador Srie D Rob Kawasaki Manual I/O externos 6(*85$1d$ (0 &$'$ 352&(662 '( 75$%$/+2
1. Segurana
Os processos de trabalho do rob so divididos nas seguintes seis (6) categorias; so indicadas, a seguir, as consideraes relativas segurana de cada uma delas. 1. Segurana antes de iniciar o rob 2. Segurana durante a ativao do rob 3. Segurana durante a programao 4. Segurana durante o ciclo automtico 5. Segurana durante a deteco de falhas 6. Segurana durante o controle e a manuteno 6(*85$1d$ $17(6 '( ,1,&,$5 2 52% As medidas a tomar nesta categoria so as seguintes: 1. Verificar de ter assimilado completamente todos os procedimentos em relao ao funcionamento, a programao e a manuteno. Verificar que tenham sido previstas todas as medidas de segurana necessrias e cumpri-las rigorosamente. 2. Verificar que no tem pessoas, aparelhos, lixo ou obstculos de qualquer tipo dentro do raio de ao do brao. 3. Verificar de ter eliminado todo o espao entre dispositivos mveis e fixos em que uma pessoa poderia ficar presa. 6(*85$1d$ '85$17( $ $7,9$d2 '2 52% Para iniciar o rob necessrio ter ativado primeiro a alimentao do controlador e depois a do motor. Para esta operao, observe rigorosamente as seguintes indicaes, com referncia s normas de segurana indicadas a seguir. 127$ ISO 10218 Robs industriais de manipulao - Segurana 1. Antes de ativar a alimentao do motor, quer na modalidade de programao quer na automtica, verificar que no tem pessoas nem obstculos de qualquer tipo dentro das protees perimetrais e em volta do rob. 2. Colocar a mo sobre o boto da parada de emergncia, de maneira a que esteja pronta a interromper imediatamente a potncia do motor no caso de falhas do rob.
Controlador Srie D Rob Kawasaki Manual I/O externos
1. Segurana
$QWHV GH TXDOTXHU RSHUDomR GR URE{ DVVHJXUHVH TXH R ERWmR GH SDUDGD GH HPHUJrQFLD IXQFLRQD EHP 6(*85$1d$ '85$17( $ 352*5$0$d2 Kawasaki recomenda a programao do rob fora das protees perimetrais. Se efetuar a programao dentro das protees perimetrais, obedea rigorosamente s seguintes indicaes, com referncia s normas de segurana indicadas a seguir. 127$ ISO 10218 Robs industriais de manipulao - Segurana 1. Verificar que foram tomadas todas as medidas de segurana necessrias e que estas funcionam corretamente antes de entrar na zona protegida. 2. Desabilitar a modalidade automtica quando um operador entra dentro das protees perimetrais. Em caso de movimentos anmalos do rob, pressionar imediatamente a parada de emergncia e evacuar a zona pelo percurso de sada de emergncia preestabelecido. 3. Instalar uma parada de emergncia para o sistema de superviso fora das protees perimetrais, numa posio em que seja possvel controlar o inteiro movimento do rob. O supervisor deve ter um acesso fcil ao boto de parada de emergncia para poder interromper o movimento do rob no caso de este efetuar movimentos errados. Ao reiniciar o rob depois de uma parada de emergncia, efetuar as operaes constantes no manual ou efetuar o reset das operaes fora das protees. As operaes de programao e de monitorao do sistema devem ser realizadas exclusivamente por pessoal que completou a formao especfica na programao e o respectivo treinamento. 4. Ao iniciar o rob na modalidade de controle, definir a velocidade de controle ao valor mais baixo possvel caso o pessoal esteja verificando os dados de programao dentro das protees perimetrais. 5. Colocar um sinal que indique que se est efetuando a programao para evitar que por erro outras pessoas atuem nos respectivos dispositivos. 6. Durante a programao, o programador e o supervisor devem continuamente prestar ateno aos movimentos anmalos e aos possveis pontos de interferncia no rob e em volta dele.
3(5,*2
Controlador Srie D 1. Segurana Rob Kawasaki Manual I/O externos 7. Se alguma medida de segurana foi desabilitada temporariamente durante a programao, habilit-la novamente aps a programao. 6(*85$1d$ '85$17( 2 &,&/2 $87207,&2 Como os programas inseridos so reproduzidos em alta velocidade, cumpra rigorosamente as seguintes indicaes para garantir as condies de segurana: 1. Nunca entrar dentro das protees perimetrais durante a execuo do ciclo automtico. 2. Quando o rob est aguardando um timer ou um sinal de entrada externo durante o ciclo automtico, pode parecer parado. Porm no se deve aproximar-se do rob porque ele vai recomear o movimento do passo seguinte logo que o tempo de espera definido pelo timer terminar e o sinal externo estiver inserido. 3. extremamente perigosa a situao que se pode criar quando, durante o ciclo automtico, a pea a ser trabalhada no agarrada corretamente, podendo ser lanada durante o movimento do rob. Se a pea manipulada por mecanismos como garras pneumticas, eletroms etc., utilizar um sistema que se interrompe em caso de avaria para evitar que a pea seja lanada em caso de interrupo durante o acionamento do mecanismo. 4. Colocar um sinal nas protees perimetrais indicando que se est efetuando um ciclo automtico e que proibido entrar na clula de trabalho. 5. No caso de o erro provocar a parada do rob durante o ciclo automtico, controlar mensagem de erro visualizada, seguir os adequados procedimentos de restabelecimento reiniciar o rob. Todas as funes de segurana temporariamente desabilitadas para procedimento de restabelecimento devero ser reabilitadas depois de completado restabelecimento e confirmadas como operativas. 6(*85$1d$ '85$17( $ '(7(&d2 '( )$/+$6 Quando ocorre um problema no rob, proceda deteco de falhas obedecendo rigorosamente ao que se segue para garantir as condies de segurana: 1. Antes da deteco de falhas, ler e compreender integralmente todos os manuais, as especificaes e os relativos documentos fornecidos por Kawasaki. 2. Antes de entrar na zona protegida verificar que foram previstas todas as medidas de segurana e que elas funcionam corretamente. a e o o
Controlador Srie D Rob Kawasaki Manual I/O externos
1. Segurana
3. Antes de entrar na zona protegida, interromper a alimentao com o boto geral. Colocar um cartaz indicando claramente Deteco de falhas em curso, e bloquear/desativar a alimentao geral para evitar que algum possa reativar a alimentao por erro. 4. A funo de deteco de falhas executada exclusivamente por pessoal que tenha freqentado e completado os cursos de programao e formao relativamente ao rob instalado ou a modelos equivalentes. 5. Antes de iniciar as operaes de deteco de falhas, verificar que em volta do rob tem espao suficiente para no ter interferncia com os sistemas perifricos. Acertar os sistemas perifricos a uma condio fixa de maneira a que no possam efetuar movimentos improvisos. 6. Desabilitar as funes do ciclo automtico ao entrar na zona protegida. No caso de ocorrerem movimentos anmalos do rob, pressionar imediatamente a parada de emergncia e evacuar a zona pelo percurso de sada de emergncia preestabelecido. 7. Instalar, alm da parada de emergncia para o operador especializado na deteco de falhas, outra parada de emergncia para o supervisor que se encontra fora das protees, numa posio que permita controlar o inteiro raio de ao do rob. Se durante as operaes de deteco de falhas o rob se movimentar de forma anmala, o supervisor deve ter acesso fcil ao boto de emergncia e poder pression-lo. Aps uma parada de emergncia as operaes de restabelecimento e de reinicio devem ser executadas fora das protees. A funo de controle da deteco de falhas pode ser executada apenas por pessoal qualificado e treinado. 8. Durante a deteco de falhas quer o operador quer o supervisor devem continuamente prestar ateno aos movimentos anmalos e aos possveis pontos de interferncia no rob e em volta dele. 9. Utilizar s peas sobressalentes autorizadas por Kawasaki. 10. Antes de retirar um atuador de seu eixo, sustentar firmemente o brao do rob com um adequado dispositivo de elevao. Ao retirar o motor o mecanismo de freio desse eixo se desabilita, e, sem um adequado suporte, o brao vai cair. necessrio o mximo cuidado porque o mesmo perigo ocorre quando se aciona o dispositivo de desbloqueio do freio de qualquer eixo do controlador. 11. Para substituir as placas, desativar a alimentao, aguardar pelo menos dois minutos para
Controlador Srie D 1. Segurana Rob Kawasaki Manual I/O externos que se descarregue completamente a energia ainda presente no condensador e verificar que a voltagem em sada da alimentao DC 0V. Prestar tambm ateno em no tocar em nenhum componente que pode estar ainda quente. (Para mais informaes consulte o manual relativo deteco e resoluo de falhas.) 12. Durante o fornecimento de ar ou gua, interromper a alimentao e, antes de comear a deteco de falhas, escoar toda a presso das linhas. 13. Utilizar luzes de 1500 lux ou superiores para evitar erros na leitura dos dados ou na substituio das peas. 14. Se alguma medida de segurana foi desabilitada temporariamente durante as operaes de deteco de falhas, habilit-la novamente aps a deteco de falhas e controlar seu funcionamento. 6(*85$1d$ '85$17( 2 &21752/( ( $ 0$187(1d2 Para evitar eventuais problemas ao sistema, limpe o rob, o controle e efetue a manuteno cumprindo rigorosamente o que se segue. 1. Antes de efetuar as operaes de controle e manuteno, ler e compreender integralmente todos os manuais, as especificaes e os relativos documentos fornecidos por Kawasaki. 2. Antes de entrar na zona protegida assegurar-se que foram previstas todas as medidas de segurana necessrias e que funcionam corretamente. 3. Antes de entrar na zona protegida, interromper a alimentao com o boto geral. Colocar um cartaz indicando claramente Controle e manuteno em curso, e bloquear/desativar a alimentao geral para evitar que algum possa reativar a alimentao por erro. 4. A funo de Controle/Manuteno executada exclusivamente por pessoal que tenha freqentado e completado os cursos de programao e formao relativamente ao rob instalado ou a modelos equivalentes. 5. Antes de iniciar as operaes de controle/manuteno, verificar que em volta do rob tem espao suficiente para no ter interferncia com os sistemas perifricos. Acertar os sistemas perifricos a uma condio fixa de maneira a que no possam efetuar movimentos improvisos. 6. Ao entrar na zona protegida desabilitar as funes do ciclo automtico. No caso de ocorrerem movimentos anmalos do rob, acionar imediatamente a parada de emergncia
Controlador Srie D 1. Segurana Rob Kawasaki Manual I/O externos e evacuar a zona pelo percurso de sada de emergncia preestabelecido. 7. Instalar, alm da parada de emergncia para o operador, outra parada de emergncia para o supervisor que se encontra fora das protees, numa posio que permita controlar o inteiro raio de ao do rob. Se durante as operaes de controle/manuteno o rob se movimentar de forma anmala, o supervisor deve ter acesso fcil ao boto de emergncia e poder pression-lo. Depois de uma parada de emergncia as operaes de restabelecimento e de reincio devem ser executadas fora das protees. A funo de operao/monitorao pode ser executada apenas por pessoal qualificado e treinado. 8. Durante o controle/manuteno, quer o operador quer o supervisor devem continuamente prestar ateno aos movimentos anmalos e aos possveis pontos de interferncia no rob e em volta dele. 9. Utilizar s peas sobressalentes autorizadas por Kawasaki. 10. Antes de retirar um atuador de seu eixo, sustentar firmemente o brao do rob com um adequado dispositivo de elevao. Ao retirar o motor o mecanismo de freio desse eixo se desabilita, e, sem um adequado suporte, o brao vai cair. necessrio o mximo cuidado porque o mesmo perigo ocorre quando se aciona o dispositivo de desbloqueio do freio de qualquer eixo do controlador. 11. Para substituir as placas, desativar a alimentao, aguardar pelo menos dois minutos para que se descarregue completamente a energia ainda presente no condensador e verificar que a voltagem em sada da alimentao DC 0V. Prestar tambm ateno em no tocar em nenhum componente que pode estar ainda quente. (Para mais informaes consulte o manual relativo deteco e resoluo de falhas.) 12. Durante o fornecimento de ar ou gua, interromper a alimentao e, antes de comear a deteco de falhas, escoar toda a presso das linhas. 13. Utilizar luzes de 1500 lux ou superiores para evitar erros na leitura dos dados ou na substituio das peas. 14. Se alguma medida de segurana foi desabilitada temporariamente durante as operaes de controle e manuteno, habilit-la novamente aps a deteco de falhas e controlar seu funcionamento
Controlador Srie D Rob Kawasaki Manual I/O externos ',6326,7,926 '( 6(*85$1d$ '26 52%6 .$:$6$.,
1. Segurana
Os robs Kawasaki apresentam as caratersticas indicadas a seguir para salvaguardar o utilizador atravs de vrias medidas de segurana. Utilize essas caractersticas e realize medidas de segurana adequadas para cada sistema. 1. Todos os circuitos de emergncias so constitudos por cablagens lgicas. 2. Na unidade porttil de programao e no controlador so colocados botes de parada de emergncia tipo cogumelo com reteno. 3. O controlador monitora a velocidade e o desvio do rob e, se os valores verificados excedem em relao aos valores definidos, o erro detectado e o rob pra. 4. Por razes de segurana, a velocidade mxima do rob na modalidade de programao ou controle limitada a 250 mm/s (velocidade operacional de segurana). 5. Se no for diferentemente especificado, o raio de ao do rob definido no valor mximo. Porm possvel ajustar conforme as necessidade, definindo o software ou as paradas mecnicas. Para mais informaes, consulte o Manual de Instalao e Ligao =Brao=, parte.
2 VLPSOHV FRQWUROH VRIWZDUH GR UDLR GH DomR GR URE{ QmR p VXILFLHQWH SDUD SUHYHQLU HYHQWXDLV DFLGHQWHV RX GDQRV e LQGLVSHQViYHO LQVWDODU SDUDGDV PHFkQLFDV H SURWHo}HV GH VHJXUDQoD
$'9(571&,$
6H R UDLR GH DomR IRL UHGX]LGR H WHP XP YDORU LQIHULRU DR YDORU GHILQLGR SHOR IDEULFDGRU DVVHJXUHVH TXH D XQLGDGH SULQFLSDO GR URE{ QmR LQWHUIHUH FRP DV SDUDGDV PHFkQLFDV
&8,'$'2
Controlador Srie D Rob Kawasaki Manual I/O externos 7,326 '( 6,1$,6 ,2 (;7(5126
2. Tipos de sinais I/O externos
Quando o rob utilizado para aplicativos diferentes, podem ser necessrios alguns dispositivos tais como um sistema de bloqueio com um perifrico, um controle central para RUN/HOLD, um bloqueio de segurana. Para controlar essas funes, se usam sinais externos de I/O (input/output), necessrios para comunicar informaes a/de aparelhos externos. Os sinais externos I/O podem ser classificados nos seguintes trs tipos. Sinal dedicado ao hardware: Sinal fornecido pelo sistema hardware, cuja configurao pode ser selecionada. No pode ser usado como sinal genrico. Sinal fornecido pelo sistema software, cuja configurao pode ser selecionada. atribudo a um sinal genrico em uso e pode ser reatribudo ao mudar o sistema. um sinal que pode ser utilizado tanto em programao como em aprendizagem. Os canais I/O no definidos como sinais dedicados ao software podem ser usados como sinais genricos. [ 127$ ] O nmero dos sinais I/O de sistema dado pela soma dos sinais dedicados ao software mais os sinais genricos. necessrio ter em conta esse valor ao especificar o nmero do sinal I/O. $'9(571&,$
Sinal dedicado ao software:
Sinal genrico:
2V VLQDLV GHGLFDGRV DR VRIWZDUH VmR GHILQLGRV H H[HFXWDGRV GHQWUR GR VRIWZDUH GR VLVWHPD 2V GLVSRVLWLYRV GH EORTXHLR GH VHJXUDQoD QmR GHYHP VHU DSHQDV GH WLSR VRIWZDUH 8VH VLQDLV GH WLSR KDUGZDUH WDLV FRPR VZLWFKHV GH OLPLWH HWF SDUD R FLUFXLWR GH VHJXUDQoD
Controlador Srie D Rob Kawasaki Manual I/O externos 6,1$,6 '(',&$'26 $2 +$5':$5(
2. Tipos de sinais I/O externos
Os sinais dedicados ao hardware podem ser usados sobretudo para operaes remotas modificando a cablagem no hardware. Esto ligados placa de terminais da placa 1KP (veja o item 3. Condies de conexo dos sinais I/O externos.). Esto disponveis 6 tipos de sinal: Input: 1. Alimentao de controle externo ON/OFF 2. Alimentao de motor externo ON 3. Circuito de segurana OFF 4. HOLD externo Output: 1.Switch TEACH/REPEAT 2. Presena de erro
$LQGD TXH D DOLPHQWDomR GH FRQWUROH H[WHUQD HVWHMD GHVDWLYDGD 2)) D DOLPHQWDomR GH SDUWH GR FRQWURODGRU FRQWLQXD D VHU IRUQHFLGD 'HVOLJXH D VZLWFK SULQFLSDO SDUD H[HFXWDU RSHUDo}HV GH PDQXWHQomR RX LQVSHomR
$'9(571&,$
Alimentao de controle Sinal de input para ativar (ON) a alimentao de controle do externo. externa ON/OFF Aplicando +24 Vcc (contato fechado), a alimentao de controle (ON) ativada. No estando aplicado (contato aberto), a alimentao de controle (OFF) desativada (OFF). Aps ter desativado a alimentao, aguarde 2-3 segundos antes de voltar a ativ-la novamente. Alimentao externa do Sinal de input para ativar (ON) a alimentao externa do motor. Se o motor ON contato fechado imediatamente (0,30,5 segundos), a alimentao ativada. O sinal vlido s se a parada de emergncia, a alimentao externa do motor OFF, etc. no esto ativados e no tem erros. Circuito de segurana Sinal de input para desativar (OFF) a alimentao externa do motor. Se o OFF sinal aberto (contato aberto), a alimentao do motor desliga. Esto disponveis os 3 sinais seguintes: Parada de emergncia, Input de protees de segurana, Input do boto trigger externo. HOLD externo Sinal de input para interromper temporariamente uma operao automtica do externo, vlido s na modalidade automtica. Se o sinal aberto (contato aberto), o rob no pode funcionar na modalidade automtica (repeat). Se o sinal aberto durante a modalidade automtica, o rob pra imediatamente com o incio do ciclo que continua em ON. Quando o sinal fechado outra vez (contato fechado), o rob retoma o movimento da posio em que tinha parado. Sinal de output para a switch TEACH/REPEAT do painel operacional. TEACH/REPEAT O contato est fechado durante modalidade de programao. Presena de erro Sinal de output externo dedicado. O contato se abre ao ocorrer um erro na modalidade de programao.
Controlador Srie D Rob Kawasaki Manual I/O externos [ 127$ ]
2. Tipos de sinais I/O externos
A alimentao externa do motor ON, o output de presena de erro e o output TEACH/REPEAT so fornecidos como sinais dedicados ao software. Use esses sinais como sinais dedicados ao hardware ou ao software segundo as condies de cablagem, pois ambos executam a mesma funo. &8,'$'2 2 VLQDO +2/' H[WHUQR p XPD IXQomR TXH SiUD R URE{ WHPSRUDULDPHQWH HQTXDQWR R LQtFLR GR FLFOR FRQWLQXDU HP 21 QD PRGDOLGDGH GH SURJUDPDomR 2 PRYLPHQWR GR URE{ p LQWHUURPSLGR QR SRQWR HP TXH R VLQDO +2/' H[WHUQR p DWLYDGR PDV R LQtFLR GR FLFOR SHUPDQHFH HP 21 2 URE{ UHLQLFLD R PRYLPHQWR QR PHVPR SRQWR HP TXH R VLQDO +2/' H[WHUQR IRL DWLYDGR
Controlador Srie D Rob Kawasaki Manual I/O externos 6,1$,6 '(',&$'26 $2 62)7:$5(
2. Tipos de sinais I/O externos
$'9(571&,$ 2V VLQDLV GHGLFDGRV DR VRIWZDUH VmR GHILQLGRV H H[HFXWDGRV SHOR VRIWZDUH GR VLVWHPD 2V GLVSRVLWLYRV GH EORTXHLR GH VHJXUDQoD QmR GHYHP VHU DSHQDV GH WLSR VRIWZDUH 8VH VLQDLV GH WLSR KDUGZDUH WDLV FRPR VZLWFKHV GH OLPLWH HWF SDUD R FLUFXLWR GH VHJXUDQoD Depois de efetuadas as configuraes iniciais, os sinais dedicados ao software podem ser usados para o controle remoto externo e para as definies de bloqueio. O uso de um sinal dedicado ao software ocupa uma parte dos sinais genricos no sistema. Portanto com o uso dos sinais dedicados ao software diminui o nmero dos sinais genricos. Apesar de as suas condies de conexo eltrica serem as mesmas dos sinais genricos, eles so diferentes dos sinais dedicados ao hardware. Os sinais dedicados ao software esto ligados aos conectores CN2 e CN4 na placa 1GW/1HW como os sinais genricos (veja o item 3. Condies de conexo dos sinais I/O externos). Os sinais dedicados ao software podem ser definidos, segundo o uso, como: 1. Funes auxiliares A-0601 e A-0602 (veja o Manual Operacional) 2. Comando DEFSIG (veja o Manual de Referncia da Linguagem AS) Tambm esto disponveis sinais dedicados ao software especficos para os diferentes aplicativos (consulte o Apndice 6. Sinais dedicados por tipo de aplicativo).
Controlador Srie D Rob Kawasaki Manual I/O externos 6,1$,6 '( ,1387 '(',&$'26 $2 62)7:$5( 1RPH GR VLQDOAliment. externa do motor ON (EXT. MOTOR ON) Reset externo do erro (EXT. ERROR RESET) Incio do ciclo externo (EXT. CYCLE START)
2. Tipos de sinais I/O externos
)XQomRAtiva (ON) a alimentao externa do motor. (Funciona como a switch MOTOR POWER do painel operacional.) Faz o reset externo do erro. (Funciona como a switch ERROR RESET do painel operacional.) Define o incio do ciclo do exterior. (Funciona como a switch CYCLE START do painel operacional.) Reinicia o programa do exterior. O input do sinal durante uma operao automtica interrompe o ciclo e volta ao primeiro passo do programa principal. Se a modalidade RPS (seleo de programas externos) habilitada, quando este sinal inserido executada a leitura do nmero do programa externo (RPSxx) definido, voltando ao primeiro passo desse programa (veja o Apndice 2). Passa a outro programa, como especificado por um nmero de programa externo no ponto END atribudo nos dados auxiliares (veja o Apndice 2). Passa a outro programa, como especificado por um nmero de programa externo no ponto JUMP atribudo nos dados auxiliares (veja o Apndice 2). Em correspondncia de um ponto JUMP atribudo atravs de dados auxiliares, este sinal desabilita a seleo de execuo de outro programa. Continua a execuo do programa original. (Veja o Apndice 2.)
7LSR GH VLQDO
Reset do programa externo (EXT. PROGRAM RESET)
RPS-ON
JUMP-ON
JUMP-OFF
Define o nmero de programa externo. As letras xx em RPSxx Nmero de programa externo indicam o nmero de programa atravs do cdigo. O nmero (RPSxx) mximo admitido por RPS muda segundo as especificaes. (External program number) (Veja o Apndice 2.) Pra temporariamente o rob na modalidade automtica. (Vlido apenas na modalidade automtica). Quando o sinal inserido (contato aberto), o rob no se move na modalidade automtica. Quando o sinal inserido durante a modalidade automtica, o rob pra imediatamente com o incio do ciclo em ON. Quando o sinal desativado (contato fechado), o rob retoma a operao no ponto em que tinha parado. Velocidade reduzida na modalidade automtica temporria e externa. A velocidade definida pela funo auxiliar A-0508 (veja o Manual Operacional).
HOLD externo
EXT_IT
Modalidade externa
automtica
lenta
(EXT. SLOW REPEAT MODE)
Controlador Srie D Rob Kawasaki Manual I/O externos &8,'$'2
2. Tipos de sinais I/O externos
2V WLSRV GH VLQDLV LQGLFDGRV SRU RX GHYHP VHU GHILQLGRV SRU XPD GXUDomR GH VHJXQGRV 6H R VLQDO IRU GHPDVLDGR EUHYH SRGHUi QmR VHU UHFRQKHFLGR $ DOLPHQWDomR H[WHUQD GR PRWRU QmR GHYH VHU FRQILJXUDGD HP 21 GH IRUPD FRQWtQXD 1HVVH FDVR WHQKD FXLGDGR SRUTXH HIHWXDQGR XPD SDUDGD GH HPHUJrQFLD D DOLPHQWDomR VHUi GHVDWLYDGD Vy SHOR WHPSR HP TXH D FRQGLomR IRU PDQWLGD ORJR TXH D SDUDGD IRU GHVDWLYDGD D DOLPHQWDomR GR PRWRU VHUi LPHGLDWDPHQWH UHVWDEHOHFLGD 9HMD WDPEpP
'HVFULomR GR WLSR GH VLQDO : detectada a frente de subida. Recomenda-se o uso de um sinal impulsivo. : detectada a frente de descida. Recomenda-se o uso de um sinal impulsivo. : detectada a frente de subida. : detectado o nvel.
Controlador Srie D Rob Kawasaki Manual I/O externos
2. Tipos de sinais I/O externos
6,1$,6 '( 287387 '(',&$'26 $2 62)7:$5( 1RPH GR VLQDO )XQomR
7LSR GH VLQDO
Alimentao do motor ON (MOTOR ON) Presena de erro (ERROR)
Indica que a alimentao do motor est ativada (ON). Funciona como a luz de sinalizao MOTOR POWER do painel operacional. Indica que ocorreu um erro. (Funciona como a luz de sinalizao ERROR do painel operacional.) Indica que todas as condies definidas na funo auxiliar A-0602, a respeito dos pontos listados a seguir, esto satisfeitas quando o rob est pronto para funcionar ou quando est em execuo automtica. 1. Switch do painel em RUN 2. EXT_IT no definida hold 3. Switch em REPEAT 4. Mod. automtica contnua 5. Execuo de passos contnua 6. Sw. TEACH LOCK em OFF 7. CYCLE START em ON. 8. RGSO em ON. 9. Modalidade Dry run off.
Automtico (AUTOMATIC)
Incio do ciclo (CYCLE START)
Indica que o rob est no ciclo automtico (no incio do ciclo). Funciona como a luz de sinalizao CYCLE START do painel operacional. Indica que o rob est na modalidade de programao para auto-aprendizagem (a switch TEACH/REPEAT est colocada em TEACH no painel operacional). Funciona como o output da switch TEACH/REPEAT dos sinais dedicados ao hardware. Indica que o rob est na posio inicial 1 (veja o Apndice 3). Indica que o rob est na posio inicial 2 (veja o Apndice 3). Indica que a alimentao de controle est em ON. Funciona como a luz de sinalizao CONTROL POWER do painel operacional. Indica que o freio do motor no est inserido e o rob se encontra acoplado. Indica que a modalidade de seleo de programa externo est habilitada (RPS vlida). (Veja o Apndice 2.) Indica que o rob est pronto para passar ao nmero de programa externo em correspondncia do ponto END atribudo atravs de dados auxiliares (veja o Apndice 2). Indica que o rob est pronto para passar ao nmero de programa externo em correspondncia do ponto JUMP atribudo atravs de dados auxiliares (veja o Apndice 2).
Modalidade de programao (TEACH MODE) Posio home 1 (HOME1) Posio home 2 (HOME2) Alimentao ON (POWER ON) RGSO Seleo de programa externo habilitada (RPS) (Ext. prog. select enabled.) RPS-ST
JUMP-ST
Controlador Srie D Rob Kawasaki Manual I/O externos 6,1$,6 ,2 *(1e5,&26
2. Tipos de sinais I/O externos
Os sinais genricos I/O so definidos atravs de aprendizagem ou programao. Os sinais so enviados a dispositivos externos ou recebidos por estes durante a execuo do programa na modalidade de programao. Esto ligados aos conectores CN2 e CN4 em 1GW/1HW (veja o item 3. Condies de conexo dos sinais I/O externos). Em relao configurao hardware, os sinais genricos I/O so iguais aos sinais dedicados ao software exceto que os sinais dedicados ao software so definidos anteriormente e utilizados para comunicar a condio do rob, para operaes remotas e para funes especializadas. Os sinais genricos so usados livremente segundo os diferentes aplicativos. (YLWH XVDU Vy XP VLQDO JHQpULFR SDUD R EORTXHLR GH VHJXUDQoD &8,'$'2 $'9(571&,$
$R GHILQLU Q~PHURV H IXQo}HV GRV VLQDLV JHQpULFRV DVVHJXUHVH TXH HVWHV QmR VmR GXSOLFDGRV GH VLQDLV Mi GHILQLGRV FRPR VLQDLV GHGLFDGRV DR KDUGZDUH RX DR VRIWZDUH RX GH RXWURV VLQDLV JHQpULFRV $ GXSOD GHILQLomR JHUD XP FRQIOLWR TXH SRGH OHYDU R FRQWURODGRU D IXQFLRQDU GH IRUPD LPSUHYLVtYHO 7,326 '( 6,1$,6 *(1e5,&26 Tem dois tipos diferentes de sinais genricos I/O: sinais para comunicar com o exterior e sinais que podem ser usados s internamente. Neste manual esto descritos exclusivamente os sinais I/O externos. Para os sinais I/O internos, consulte o Manual de Referncia da Linguagem AS. Para os controladores da srie D, possvel aumentar os sinais I/O externos com incrementos de 32 canais contendo sinais genricos e sinais dedicados ao software. Ao definir o sistema, necessrio ter em conta que no valor total dos sinais I/O externos esto includos os sinais dedicados ao software. &8,'$'2 $ H[SDQVmR GRV VLQDLV ,2 H[WHUQRV DFRQWHFH SRU LQFUHPHQWRV GH FDQDLV GH LQSXW H RXWSXW 'HYLGR j HVWUXWXUD KDUGZDUH R YDORU GRV FDQDLV SDUD LQSXW H RXWSXW p VHPSUH R PHVPR
Controlador Srie D Rob Kawasaki Manual I/O externos 7(0325,=$d2 ,2 '26 6,1$,6 *(1e5,&26
2. Tipos de sinais I/O externos
O uso dos sinais genricos depende do tipo de programao do rob: programao em blocos (auto-aprendizagem) ou em linguagem AS. importante entender bem a temporizao antes de comear a usar os sinais genricos. 7(0325,=$d2 $75$9e6 '( $872$35(1',=$*(0 Com os blocos de programao, as informaes abaixo referidas so atribudas a cada passo usando a unidade porttil de programao. 1. ngulo da junta do brao do rob (dados de posicionamento) 2. Dados auxiliares do movimento para esse posicionamento (modalidade de interpolao, velocidade, preciso, ferramenta) 3. Dados dos dispositivos de bloqueio 4. Sinais I/O genricos Os sinais genricos atribudos na programao em blocos so chamados OX (output) e WX (input). A temporizao dos sinais OX e WX durante a execuo de um programa realizado com a programao em blocos indicada no exemplo seguinte.Passo 7 Passo 8OX5 OX6
Passo 10 Passo 9OX6 WX3
OX5 OX6 WX3 (Input waiting range) WX3 System Switch OX PREOUT ON
Se OX5 atribudo no passo 8: 1. Quando o rob alcana o campo de preciso do passo 7 e se aproxima do ponto atribudo do passo 8, OX5 ativado (ON). 2. Quando o rob alcana o campo de preciso do passo 8 e comea a mover-se para o ponto atribudo do passo 9, OX5 desativado (OFF) porque no atribudo no passo 9. Se OX6 atribudo nos passos 8 e 9 1. Quando o rob alcana o campo de preciso do passo 7 e se aproxima do ponto atribudo do passo 8, OX6 ativado (ON). 2. Quando o rob alcana o campo de preciso do passo 8 e comea a mover-se para o ponto atribudo do passo 9, OX6 permanece ativado (ON) enquanto atribudo no passo 9.
Controlador Srie D 2. Tipos de sinais I/O externos Rob Kawasaki Manual I/O externos 3. Normalmente, depois de alcanado o campo de preciso do passo 9, o rob se aproxima do ponto atribudo do passo 10 e OX6 desativado (OFF) imediatamente (isso porque OX6 no atribudo no passo 10). Neste exemplo porm o controlador aguarda o input WX3, porque WX3 atribudo no passo 9. O passo 9 no passa ao 10 at WX3 ser ativado. 4. Se WX3 ativado, o passo passa a 10 e OX6 desativado (OFF). Se WX3 atribudo no passo 9: 1. Quando o rob alcana o campo de preciso do passo 9, aguarda o input WX3. 2. Quando WX3 ativado, o rob move-se para o ponto atribudo do passo 10. Se WX3 no ativado, o rob aguarda em standby no passo 9. 2 VLQDO 2; p GHVDWLYDGR 2)) TXDQGR R URE{ p SDUDGR GHYLGR D GHVDWLYDomR GD DOLPHQWDomR $ SDVVDJHP GH XP SDVVR DR VXFHVVLYR RFRUUH TXDQGR R URE{ DOFDQoD R SDVVR DWULEXtGR TXH QHP VHPSUH FRLQFLGH FRP R SRQWR DWULEXtGR ,VVR GHSHQGH GD SUHFLVmR GRV GDGRV GHILQLGRV GXUDQWH D DWULEXLomR GR SDVVR 4XDQWR PDLRU IRU D SUHFLVmR PDLRU VHUi D SRVVLELOLGDGH GH D LQSXWV H RXWSXWV PXGD FRQIRUPH D SUHFLVmR GRV GDGRV DWULEXtGRV QHVVH SDVVR GR PRWRU LQtFLR GR FLFOR HP 2)) RX HP +2/' e QRYDPHQWH DWLYDGR 21 DSyV UHLQLFLDU
&8,'$'2
SDVVDJHP DR SRQWR VXFHVVLYR RFRUUHU QR SRQWR DWULEXtGR 4XDQWR PHQRU IRU D SUHFLVmR PDLV FHGR RFRUUHUi D SDVVDJHP DR SRQWR VXFHVVLYR e LPSRUWDQWH QRWDU TXH D WHPSRUL]DomR GRV
7(0325,=$d2 $75$9e6 '( 352*5$0$d2 $6
Alm da programao em blocos (sinais OX e WX) acima descrita, os sinais I/O genricos tambm podem ser atribudos atravs de programao com a linguagem AS. Com este mtodo de programao os sinais I/O genricos dispem de aplicativos mais variados em relao aos sinais OX e WX e podem ser usados de vrias maneiras. As instrues listadas a seguir so usadas para o controle dos sinais I/O genricos. Para mais informaes consulte o Manual de Referncia da Linguagem AS. Instruo Funo SIGNAL Ativa/desativa (ON/OFF) os sinais genricos de output (um de cada vez) BITS Ativa/desativa (ON/OFF) os sinais genricos de output (em conjunto) RESET Desativa os sinais genricos de output (atua em todos os sinais) RUNMASK Controla os sinais genricos de output ao parar o rob PULSE Impulso em sada para os sinais de output genricos DLYSIG Atraso em sada para os sinais de output genricos SWAIT Aguarda que as condies para os sinais de input genricos estejam satisfeitas SIG( ) Determina se as condies para os sinais de input genricos esto satisfeitas BITS( ) L os sinais de input genricos como especificado pelo formato de bit ON/ONI Interrompe a execuo do programa ao receber sinais de input genricos A temporizao dos sinais I/O genricos na programao executada em linguagem AS indicada no exemplo seguinte (com a switch de sistema PREEFETCH. SIGINS em OFF). Controle do sinal Input Controle do sinal Output
Controlador Srie D Rob Kawasaki Manual I/O externos Programa de exemplo:11 12 13 14 15 16 17 18 JMOVE #lc SIGNAL 5,6 JMOVE #lc2 SIGNAL -5 JMOVE #lc3 SWAIT 1003 SIGNAL -6 JMOVE #lc4
2. Tipos de sinais I/O externos#lc4
#lc1
#lc2 #lc3 Wait
OUT5 OUT6 IN3 (Input waiting range) IN3 System Switch PREFETCH SIGINS OFF
O diagrama acima indicado vlido quando a preciso de posicionamento (valor especificado pela instruo ACCURACY) elevada. Se a preciso for baixa, a transio (ativao do sinal) ocorrer antes de o rob alcanar o ponto atualmente atribudo. OUT5: 1. O sinal de output genrico (OUT5) se ativa (ON) quando o rob comea a mover-se para #1c2. 2. Depois de o rob ter alcanado #lc2 e ter comeado o movimento para #lc3, OUT5 se desativa (OFF). OUT6: 1. O sinal de output genrico (OUT6) se ativa (ON) quando o rob se move para #1c2. 2. Depois de o rob ter alcanado #lc2, comea a mover-se para #lc3. OUT6 permanece em ON. 3. O sinal de output genrico (OUT6) se desativa (OFF) quando o rob se move para #1c4. IN3: 1. O rob inicia o controle do sinal de input genrico (IN3) quando comea a mover-se para #lc3. 2. O rob aguarda porque IN3 no est ativado (ON) quando alcana #1c3. 3. O rob se move para #lc4 quando IN3 ativado (ON). Se IN3 ativado depois de o rob ter comeado o controle do sinal mas antes de chegar a #1c3, o controle logo desabilitado e o rob se move para #1c4 sem aguardar. &8,'$'2
*HUDOPHQWH RV VLQDLV 287 DR FRQWUiULR GRV VLQDLV 2; QmR VH GHVDWLYDP VH R URE{ SiUD GHYLGR j DOLPHQWDomR GR PRWRU HP 2)) RX +2/' 6H GHILQLGRV SHOD LQVWUXomR 5810$6. RV VLQDLV 287 IXQFLRQDP FRPR RV VLQDLV 2; GHVDWLYDQGRVH TXDQGR D H[HFXomR GR SURJUDPD p LQWHUURPSLGD
Controlador Srie D Rob Kawasaki Manual I/O externos
3. Condies de conexo dos sinais I/O externos
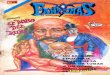
&21',d(6 '( &21(;2 '26 6,1$,6 ,2 (;7(5126 As condies de conexo dos sinais I/O externos para os sinais hardware e para os sinais I/O genricos (incluindo os sinais dedicados ao software) so diferentes. 6,1$,6 '(',&$'26 $2 +$5':$5( Quando se utilizam sinais dedicados ao hardware necessrio lig-los placa de terminais da placa 1KP e observar as seguintes condies. $/,0(17$d2 (;7(51$ '( &21752/( 212)) Este sinal de input ativa/desativa a alimentao (AVR) do controlador do exterior. 8VDQGR D DOLPHQWDomR H[WHUQD GH FRQWUROH 212)) Deixe os pinos 3-4 abertos e insira +24V no pino 1 e 0V no pino 2 do conector X9 na placa 1KP. Ligue os pinos 1-4 do conector X9 como indicado na figura seguinte.
ControllerConnector X9 1 2 3 4 (1KP Board) Do not connect
ExternalSwitch or Relay contact +24V External 0V External
Contact close : Control power ON Contact open : Control power OFF
7HQKD FXLGDGR DR OLJDU RV SLQRV H DR FRQHFWRU ; $ FRQH[mR HIHWXDGD QmR FRUUHWDPHQWH SRGH FDXVDU GDQRV j SODFD .3 RX j DOLPHQWDomR
&8,'$'2
Controlador Srie D Rob Kawasaki Manual I/O externos
3. Condies de conexo dos sinais I/O externos
e QHFHVViULR XP LQWHUYDOR GH VHJXQGRV SDUD D DOLPHQWDomR SDVVDU GH 2)) FRQWDWR DEHUWR D 21 FRQWDWR IHFKDGR 8VH PDWHULDO GH FDEODJHP $:*
&8,'$'2 8VH VZLWFKHV RX UHOpV FRP DV VHJXLQWHV FDUDFWHUtVWLFDV &DSDFLGDGH GR FRQWDWR '& 9 $ RX PDLRU (VSHFLILFDo}HV GD ERELQD GR UHOp '& 9 P$ $OLPHQWDomR '& 9
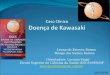
1mR XVDQGR D DOLPHQWDomR H[WHUQD GH FRQWUROH 212)) Ligue os pinos 1-4 ao conector X9 na placa 1KP como indicado a seguir.ControllerConnector X9 1 2 3 4 (1KP Board) Jumper Do not connect
External
2V SLQRV H GR FRQHFWRU ; HVWmR LQWHUOLJDGRV DR HQYLR GR FRQWURODGRU 6H XVDU D DOLPHQWDomR H[WHUQD GH FRQWUROH 212)) UHWLUH R MXPSHU H HIHWXH D FRQH[mR GR GLVSRVLWLYR H[WHUQR DR FRQHFWRU ; FRP D FRQILJXUDomR LQGLFDGD QDV SiJLQDV DQWHULRUHV
&8,'$'2
Controlador Srie D Rob Kawasaki Manual I/O externos
3. Condies de conexo dos sinais I/O externos
$/,0(17$d2 (;7(51$ '2 02725 (0 21 Este sinal de input ativa (ON) a alimentao externa do motor e tem a mesma funo da switch MOTOR POWER ON do painel operacional. $'9(571&,$ 1XQFD GHL[H D DOLPHQWDomR H[WHUQD GR PRWRU HP 21 FRQWDWR IHFKDGR 6H IRU GHL[DGD HP 21 R URE{ SRGHUi HIHWXDU PRYLPHQWRV LPSUHYLVtYHLV SRU H[HPSOR DSyV GHVDWLYDU XPD SDUDGD GH HPHUJrQFLD
8VDQGR D DOLPHQWDomR H[WHUQD GR PRWRU HP 21 Ative (ON) a alimentao do motor fechando os pinos 5-6 do conector CX9 na placa 1KP. Ligue uma switch ou um rel entre os pinos 5 e 6 do conector X9. Use um sinal de input impulsivo j que o contato no deve permanecer fechado. Controller ExternalConnector X9 Switch or Relay contact 5 6 (1KP Board)A alimentao do motor se ativa (ON) ao desativar a switch - ou o rel - durante 0,3-0,5 segundos
+24V Interno 0V Interno
1mR XVDQGR D DOLPHQWDomR H[WHUQD GR PRWRU HP 21 Abra os pinos 5-6 do conector X9 da placa 1KP sem os cablar. &,5&8,72 '( 6(*85$1d$ (0 2))
8VH VZLWFKHV RX UHOpV FRP DV VHJXLQWHV HVSHFLILFDo}HV &DSDFLGDGH GR FRQWDWR '& 9 $ RX PDLRU )RWRDFRSODGRU '& 9 P$ 8VH PDWHULDO GH FDEODJHP $:*
$'9(571&,$
Este sinal de input interrompe a alimentao dos motores do exterior. Quando este sinal cai, a alimentao do motor interrompida. Esto disponveis trs diferentes tipos de sinal de input do circuito de segurana. 1. External emergency stop / Parada de emergncia externa (vlido nas modalidades de programao e automtica) 2. Safety fence input / Input de protees de segurana (vlido nas modalidades de programao e automtica) 3. External trigger input /Input do boto trigger externo (vlido nas modalidades de programao e automtica)
Controlador Srie D Rob Kawasaki Manual I/O externos
3. Condies de conexo dos sinais I/O externos [ 127$]
Este controlador tem um sistema de segurana em circuito duplo e um sistema de circuito simples. Nos normais procedimentos operacionais utilize o sistema de circuito duplo se no houver razes especiais. Se usar o sistema de circuito simples, defina a dip-switch SW2-2 da placa 1KP em OFF. $ GHVDWLYDomR GR FLUFXLWR GH VHJXUDQoD GHYH VHU H[HFXWDGD HP FRQIRUPLGDGH FRP DV QRUPDV ,(& (1 H (1 SRUTXH VXD IXQomR H VXD RSHUDFLRQDOLGDGH VmR PXLWR LPSRUWDQWHV SDUD D VHJXUDQoD GR RSHUDGRU $'9(571&,$
3$5$'$ '( (0(5*1&,$ (;7(51$ Este sinal tem a mesma funo da switch EMERGENCY STOP do painel operacional. 3(5,*2
8VH XP FLUFXLWR GH FRQWDWR FRQWDWR PHFkQLFR SDUD DWLYDUGHVDWLYDU GR H[WHULRU 2 XVR GH XP FLUFXLWR VHPLFRQGXWRU p H[WUHPDPHQWH SHULJRVR SRUTXH D LQWHUUXSomR GD DOLPHQWDomR GR PRWRU SRGH WRUQDUVH LQRSHUDFLRQDO HP FDVR GH DQRPDOLDV GR VLVWHPD 8VDQGR XP SDUDGD GH HPHUJrQFLD H[WHUQD 3DUD OLJDU XPD VZLWFK GH FRQWDWR H[WHUQD GLUHWDPHQWH QXP VLVWHPD GH FLUFXLWR GXSOR Retire os jumpers dos pinos 3-4 e 5-6 do conector X7 na placa 1KP e ligue os contatos da parada de emergncia como indicado a seguir. Interligue os pinos 1-2 e 7-8.ControllerOP T/P Connector X7 1 +24V Internal 2 3 0V Internal 4 5 6 7 8 (1KP Board) Jumper Jumper
External
Controlador Srie D 3. Condies de conexo dos sinais I/O externos Rob Kawasaki Manual I/O externos 3DUD FRQILJXUDU FLUFXLWRV GH VHJXUDQoD H[WHUQRV FRP LQSXWV GH SDUDGD GH HPHUJrQFLD H[WHUQRV H FRQWDWRV GH SDUDGD GH HPHUJrQFLD FRORFDGRV IRUD H ORQJH GR FRQWURODGRU HP VLVWHPDV GXSORV No conector X7, retire todos os jumpers dos pinos 1-2, 3-4, 5-6, e 7-8. Mantenha longe do controlador os contatos da parada de emergncia ligados aos pinos 1-3, 5-7. Aps ter instalado externamente ao controlador os contatos da parada de emergncia, ligue-os aos pinos 2-4, 6-8 no conector X7.ControllerOP T/P Connector X7 1 +24V Internal 2 3 0V Internal 4 5 6 7 8 (1KP Board
External
3DUD OLJDU R FRQWDWR GD VZLWFK H[WHUQD GLUHWDPHQWH QXP VLVWHPD GH FLUFXLWR VLPSOHV Retire os jumpers dos pinos 3-4 do conector X7 na placa 1KP e ligue o contato da parada de emergncia como indicado na figura seguinte. Interligue os pinos 1-2, 5-6 e 7-8.ControllerOP T/P Connector X7 1 +24V Internal 2 3 0V Internal 1KP Board 4 Jumper
External
Controlador Srie D 3. Condies de conexo dos sinais I/O externos Rob Kawasaki Manual I/O externos 3DUD FRQILJXUDU FLUFXLWRV GH VHJXUDQoD H[WHUQRV FRP LQSXWV GH SDUDGD GH HPHUJrQFLD H[WHUQRV H FRQWDWRV GH SDUDGD GH HPHUJrQFLD FRORFDGRV IRUD H ORQJH GR FRQWURODGRU HP VLVWHPDV VLPSOHV Retire os jumpers dos pinos 1-2, 3-4 do conector X7 na placa 1KP. Mantenha de fora os contatos de parada de emergncia entre os pinos 1 e 3. Ligue os contatos de parada de emergncia externos entre os pinos 2 e 4 do conector X7 e interligue os pinos 5-6 e 7-8.ControllerOP T/P Connector X7 1 +24V Internal 2 3 0V Internal (1KP Board 4
External
8VH VZLWFKHV RX UHOpV FRP DV VHJXLQWHV HVSHFLILFDo}HV &DUJD GR FRQWDWR '& 9 $ RX PDLRU %RELQD GR UHOp '& 9 P$ 8VH PDWHULDO GH FDEODJHP $:* 3(5,*2
&8,'$'2
3DUD D OLJDomR j UHGH HOpWULFD H[WHUQD XVH H[FOXVLYDPHQWH FLUFXLWRV GHGLFDGRV LQGHSHQGHQWHV GH RXWURV FLUFXLWRV $ OLJDomR DWUDYpV GH EDWHULD RX DWUDYpV GH XP FLUFXLWR OLJDGR HP FRPXP p PXLWR SHULJRVD SRUTXH D IRUPDomR GH FLUFXLWRV VHFXQGiULRV QD DOLPHQWDomR SRGH GHVDELOLWDU D VZLWFK GH SDUDGD GH HPHUJrQFLD
1mR XVDQGR XP SDUDGD GH HPHUJrQFLD H[WHUQD Interligue os pinos 1-2, 3-4, 5-6, e 7-8 do conector X7 na placa 1KP.
Controlador Srie D Rob Kawasaki Manual I/O externos
3. Condies de conexo dos sinais I/O externos
,1387 '$6 3527(d(6 '( 6(*85$1d$ Este sinal de input vlido exclusivamente na modalidade de programao. ,QSXW GDV SURWHo}HV GH VHJXUDQoD HP XP VLVWHPD GH FLUFXLWR GXSOR Retire os jumpers dos pinos 1-2 e 3-4 do conector X8 na placa 1KP e ligue os contatos da switch de fim de curso das protees de segurana como indicado a seguir.ControllerConnector X8 24V Internal 0V Internal 1 2 3 4 (1KP Board)
ExternalSafety fence switch
,QSXW GDV SURWHo}HV GH VHJXUDQoD HP XP VLVWHPD GH FLUFXLWR VLPSOHV Retire os jumpers dos pinos 1-2 do conector X8 na placa 1KP e ligue os contatos da switch para as protees de segurana como indicado a seguir.ControllerConnector X8 24V Internal 0V Internal 1 2 3 4 (1KP Board) Jumper
ExternalSafety fence switch
8VH XPD VZLWFK SDUD DV SURWHo}HV GH VHJXUDQoD FRP DV VHJXLQWHV HVSHFLILFDo}HV &DUJD GR FRQWDWR '& 9 $ RX PDLRU %RELQD GR UHOp '& 9 P$ 8VH PDWHULDO GH FDEODJHP $:* 1mR XVDQGR R LQSXW GDV SURWHo}HV GH VHJXUDQoD Interligue os pinos 2 e 3-4 do conector X8 da placa 1KP.
&8,'$'2
Controlador Srie D Rob Kawasaki Manual I/O externos
3. Condies de conexo dos sinais I/O externos
,1387 '2 %272 75,**(5 (;7(512 Este sinal de input vlido exclusivamente na modalidade de programao. 6LQDO GH WULJJHU HP XP VLVWHPD GH GXSOR FLUFXLWR Retire os jumpers dos pinos 5-6 e 7-8 do conector X8 na placa 1KP e ligue o contato do boto trigger externo como indicado a seguir.ControllerConnector X8 24V Internal 0V Internal 5 6 7 8 (1KP Board)
External
6LQDO GH WULJJHU H[WHUQR HP XP VLVWHPD GH FLUFXLWR VLPSOHV Retire os jumpers dos pinos 5-6 do conector X8 na placa 1KP e ligue o contato do boto trigger externo como indicado a seguir. Os pinos 7-8 devem ser interligados.ContrllerConnector X8 24V Internal 0V Internal 5 6 7 8 (1KP Board) Jumper
External
1mR XVDQGR XP VLQDO GH WULJJHU H[WHUQR Interligue os pinos 5-6 e 7-8 do conector X8 na placa 1KP.
Controlador Srie D Rob Kawasaki Manual I/O externos 6,1$/ '( +2/' (;7(512
3. Condies de conexo dos sinais I/O externos
Este sinal de input interrompe temporariamente as operaes do rob na modalidade automtica externamente. vlido s na modalidade automtica. 8VDQGR R VLQDO GH +2/' H[WHUQR Retire os jumpers dos pinos 7-8 do conector da placa de terminais X9 na placa 1KP e ligue um contato para a parada de hold externa como indicado a seguir.
ControllerConnector X9 +24V Internal 0V Internal (1KP Board) 7 8
ExternalSwitch or Relay contact
W hen the contact is open, the robot will be in HOLD.
8VH VZLWFKHV RX UHOpV FRP DV VHJXLQWHV HVSHFLILFDo}HV &DSDFLGDGH GR FRQWDWR '& 9 $ RX PDLRU )RWRDFRSODGRU '& 9 P$ 8VH PDWHULDO GH FDEODJHP $:*
&8,'$'2
1mR XVDQGR R VLQDO GH +2/' H[WHUQR Interligue os pinos 7-8 do conector X9 na placa 1KP.
Controlador Srie D Rob Kawasaki Manual I/O externos 287387 7($&+5(3($7
3. Condies de conexo dos sinais I/O externos
Este sinal de output indica o estado da switch TEACH/REPEAT do painel operacional. 8VDQGR R RXWSXW 7($&+5(3($7 Este sinal ativado pelos pinos 9-10 do conector X8 na placa 1KP.ControllerConnector X8 9 10 1KP Board
External
Contact close Contact open
TEACH REPEAT
&8,'$'2
1mR OLJXH XP FRQWDWR TXH H[FHGD DV FDUDWHUtVWLFDV GH FDUJD &DUJD GR FRQWDWR '& 9 $ RX LQIHULRU 287387 '( 35(6(1d$ '( (552 Um contato que assinala a presena do erro do exterior ligado entre os pinos 11 e 12 do conector X8 na placa 1KP. 8VDQGR XP RXWSXW GH SUHVHQoD GH HUURControllerConnector X8 11 Normal 12 1KP Board Error Contact close Contact open
External
[ 127$ ]
Podem ocorrer os seguintes erros na realizao dos circuitos de segurana. Quando ocorrer um erro, execute a deteco do problema como aqui indicado. Erro Contra-medidas Condio Controle a cablagem do conector (X7, X8) e a parte inconsistente inconsistente no indicada na mensagem de erro. circuito de segurana Fusvel queimado no O fusvel F1 (0,3 A) da placa 1KP est queimado. Verifique que a circuito de segurana conexo ao circuito de segurana (conector X7, X8) correta e substitua o fusvel.
Controlador Srie D Rob Kawasaki Manual I/O externos 6,1$,6 ,2 *(1e5,&26
3. Condies de conexo dos sinais I/O externos
Todos os sinais I/O genricos (incluindo os sinais dedicados ao software) so processados pela placa 1GW ou 1HW no controlador. Veja o Apndice 7 para a atribuio dos pinos. $'9(571&,$ $ SODFD *: p XVDGD SDUD DV HVSHFLILFDo}HV GRV FRQWURODGRUHV QR -DSmR H QRV (VWDGRV 8QLGRV HQTXDQWR D SODFD +: p XVDGD QD (XURSD $QWHV GH XVDU YHULILTXH TXH HVWi LQVWDODGD D SODFD FRUUHWD 6,1$,6 '( ,1387 (;7(5126 ([WHUQR o 5RE{ As placas 1GW/1HW dispem de 32 sinais de input. Tem dois comuns executados pelos pinos 18 e 19 de CN4. A terra est ligada a uma alimentao externa, input +24V (1GW) ou 0V (1HW). Cada conexo comum fornece a alimentao a 16 canais, os pinos de 1-16 e 20-35 de CN4 respectivamente. Os sinais de input externos esto ligados a esses pinos. &DUDWHUtVWLFDV GRV LQSXWV Nmero de circuitos: Tipo de input: Voltagem de input: Tenso de input: Tipo de conector:
32 input de fotoacoplador DC24 V 10 % 10 mA 37-pino conector D-Sub fmea (na placa), macho (no cabo) $'9(571&,$
$VVHJXUHVH TXH D SRODULGDGH GD DOLPHQWDomR H[WHUQD '& 9 p FRUUHWD 8PD FRQH[mR QmR FRUUHWD SRGH FDXVDU GDQRV j SODFD *:+: j DOLPHQWDomR H DRV FRQWDWRV
Controlador Srie D Rob Kawasaki Manual I/O externosController
3. Condies de conexo dos sinais I/O externos
External
0V External
+24V External
0V External
+24V External
Sinais de input genricos - 1GWController External+24V External
0V External +24V External
0V External
Sinais de input genricos 1HW
Controlador Srie D Rob Kawasaki Manual I/O externos
3. Condies de conexo dos sinais I/O externos
6,1$,6 '( 287387 (;7(5126 5RE{ o ([WHUQR A alimentao externa +24 V fornecida ao circuito output atravs dos pinos 18 e 19 de CN2. Dois comuns (pino 36 e 37 de CN2) fornecem 0V ao circuito de output de OUT1-16 e OUT17-32 respectivamente. &DUDWHUtVWLFDV GRV RXWSXWV Nmero de circuitos: Tipo de output: Voltagem: Tenso mx. de carga contnua: Tipo de conector:
32 Transistor output DC24 V 10 % 0,1 A ou inferior 37-pino conector D-Sub fmea (na placa) macho (no cabo) $'9(571&,$
$VVHJXUHVH TXH D SRODULGDGH GD DOLPHQWDomR H[WHUQD 9 p FRUUHWD GXUDQWH D FRQH[mR GRV FRPXQV H GRV VLQDLV D &1 8PD FRQH[mR QmR FRUUHWD SRGH FDXVDU GDQRV DRV FRPSRQHQWHV GD SODFD *:+: &8,'$'2 7RGDV DV FDUJDV LQGXWLYDV FRPR D ERELQD GR UHOp H D YiOYXOD VROHQyLGH GHYHP WHU SURWHomR GH VREUHWHQVmR 3UHVWH DWHQomR j SRODULGDGH GR GLRGR LQVWDODGR HP SDUDOHOR FRP D FDUJD 6H D LQVWDODomR QmR IRU FRUUHWD SRGHUmR RFRUUHU GDQRV DRV FRPSRQHQWHV GHYLGRV D VREUHWHQVmR $ DOLPHQWDomR OLJDGD D 9,1 GHYH VHU D PHVPD GD FDUJD $ WHQVmR GH FDUJD HP VDtGD GH RXWSXW GHYH VHU $ RX LQIHULRU SDUD FDGD FDQDO
Controlador Srie D Rob Kawasaki Manual I/O externos
3. Condies de conexo dos sinais I/O externos
Controller
External24V External
0V External
24V External
0V External
Sinal de output genrico -1GW &8,'$'2 /LJXH XP GLRGR GH SURWHomR FRQWUD VREUHWHQVmR QDV GXDV H[WUHPLGDGHV GD ERELQD GR UHOp H[WHUQR DVVHJXUHVH TXH D SRODULGDGH p FRUUHWD
Controlador Srie D Rob Kawasaki Manual I/O externosController
3. Condies de conexo dos sinais I/O externos
External24V External
0V External
24V External
0V External
Sinal de output genrico -1HW
Controlador Srie D 4. Procedimentos para a conexo dos sinais I/O externos Rob Kawasaki Manual I/O externos 352&(',0(1726 3$5$ $ &21(;2 '26 6,1$,6 ,2 (;7(5126 Tenha em conta as seguintes indicaes durante a conexo dos sinais I/O externos ao controlador e aos aparelhos perifricos (painel de bloqueio, etc.). 'HVOLJXH D DOLPHQWDomR GR FRQWURODGRU H GRV DSDUHOKRV SHULIpULFRV GXUDQWH D FRQH[mR GRV ,2 H[WHUQRV 3DUD HYLWDU TXH DWp D FRQH[mR VHU FRPSOHWDGD GHVSUHYHQLGDPHQWH DOJXpP OLJXH D DOLPHQWDomR FRORTXH XP FDUWD] QD VZLWFK SDUD DVVLQDODU D DWLYLGDGH HP FXUVR RX HQFDUUHJXH XP VXSHUYLVRU SDUD YLJLDU D VZLWFK 8P HUUR TXDOTXHU QHVWD IDVH SRGH UHVXOWDU H[WUHPDPHQWH SHULJRVR SRGHQGR FDXVDU FKRTXH HOpWULFR RX JUDYHV GDQRV DR VLVWHPD HOpWULFR &8,'$'2 $'9(571&,$
7RPH DV DGHTXDGDV PHGLGDV FRQWUD RV UXtGRV GRV DSDUHOKRV FRP ,2 H[WHUQRV OLJDGRV DR FRQWURODGRU 2V UXtGRV HOpWULFRV TXH LQWHUIHUHP FRP RV ,2 SRGHP FDXVDU PDXV IXQFLRQDPHQWRV RX GDQRV DR VLVWHPD HOpWULFR 1mR VH HQJDQH QR Q~PHUR GR SLQR QR FRQHFWRU GXUDQWH D FRQH[mR GRV ,2 H[WHUQRV 8P SLQR HUUDGR SRGH FDXVDU DQRPDOLDV QR VLVWHPD HOpWULFR 3URWHMD RV FDERV GRV ,2 H[WHUQRV SDUD HYLWDU TXH R SHVVRDO RX RV DSDUHOKRV FRPR PiTXLQDV HOHYDGRUDV RX RXWURV REMHWRV RV SLVHP RX SDVVHP SRU FLPD GHOHV 2V FDERV QmR SURWHJLGRV SRGHP VHU JUDYHPHQWH GDQLILFDGRV FDXVDQGR DYDULDV DR VLVWHPD HOpWULFR (YLWH FDEODU RV FDERV GRV ,2 H[WHUQRV HP FRQMXQWR RX HP SDUDOHOR jV OLQKDV GH DOLPHQWDomR 6HSDUH RV FDERV H DV OLQKDV GH SHOR PHQRV FP $ LQGXomR HOHWURPDJQpWLFD GR FDER GR PRWRU GDV OLQKDV GH DOLPHQWDomR GRV SHULIpULFRV GR FDER GD VROGDGRUD HWF WDQWR LQWHUQRV FRPR H[WHUQRV DR FRQWURODGRU SRGHP FDXVDU LQWHUIHUrQFLDV QR FDER GRV ,2 H JHUDU PDXV IXQFLRQDPHQWRV 3DUD D FRQH[mR GH OLQKDV FRP FDUJDV UHGX]LGDV FRPR VHTHQFLDGRUHV UHFRPHQGDVH R XVR GH FDERV EOLQGDGRV )L[H SRU PHLR GH IDL[DV R FDER GRV ,2 H[WHUQRV DR VXSRUWH FRORFDGR QD SDUWH VXSHULRU GR FRQWURODGRU 'HVWH PRGR VH SURWHJH R EORFR GH VDtGD GR FRQHFWRU GH H[FHVVLYDV VROLFLWDo}HV SX[DGDV DUUDQFDPHQWRV GR FDER HWF ,QVWDOH R GLVSRVLWLYR GH SURWHomR GH PDQHLUD D TXH R FDER GRV ,2 H[WHUQRV QmR SRVVD FDXVDU D SHUGD GR LVRODPHQWR RX D GHVFRQH[mR GD SRUWD
Controlador Srie D 4. Procedimentos para a conexo dos sinais I/O externos Rob Kawasaki Manual I/O externos
Placa 1KP Porta de entrada dos sinais I/O
Placa 1GW/1HW
&21(;2 '26 6,1$,6 '(',&$'26 $2 +$5':$5(
Lateral
Frontal
1. Use a entrada do lado esquerdo do controlador para cablar os sinais de I/O externos. 2. Ligue os cabos para a conexo dos sinais dedicados ao hardware aos conectores X7, X8 e X9 na placa 1KP. Veja o item 3.1 e o Apndice 7 para as caratersticas e a atribuio dos pinos. 3. Para mais informaes sobre a conexo dos sinais dedicados ao hardware, consulte o Manual de Instalao e Conexo. &21(;2 '26 6,1$,6 *(1e5,&26 1. Use a entrada no lado esquerdo do controlador para cablar os sinais de I/O externos. 2. Ligue os cabos para a conexo dos sinais genricos aos conectores CN2 e CN4 na placa 1GW/1HW. Veja o Apndice 7 para a atribuio dos pinos. 3. Para mais informaes sobre a conexo dos sinais genricos, consulte o Manual de Instalao e Conexo.
Controlador Srie D Apndice 1. Procedimentos para parar o rob Rob Kawasaki Manual I/O externos $31',&( 352&(',0(1726 3$5$ 3$5$5 2 52% Tem duas modalidades principais para parar imediatamente o movimento do rob: parada externa HOLD e alimentao externa do motor em OFF. Mesmo quando a alimentao de controle for interrompida, o movimento poder ser recomeado da posio de parada. $31',&( $/,0(17$d2 (;7(51$ '2 02725 (0 2)) 3(5,*2&DVR SUHFLVH GH HQWUDU QR UDLR GH DomR GR URE{ DVVHJXUHVH TXH SDURX R URE{ SRVLFLRQDQGR HP 2)) D DOLPHQWDomR GR PRWRU 3DUD SUHYHQLU HQWUDGDV DFLGHQWDLV QD iUHD GR URE{ FRORTXH SURWHo}HV GH VHJXUDQoD GRWDGDV GH SRUWD GH HQWUDGD FRP SLQR GH VHJXUDQoD H XP IRU H[WUDtGR VLVWHPD GH EORTXHLR TXH LQWHUURPSD D DOLPHQWDomR GR PRWRU TXDQGR R SLQR GH VHJXUDQoD
Interrompendo a alimentao do motor, o rob pra imediatamente, e o incio do ciclo posicionado em OFF (parada do ciclo). Para parar o rob em caso de emergncia use o sinal de alimentao externa do motor em OFF em lugar da parada externa HOLD descrita mais abaixo. No utilize o sinal de alimentao externa do motor em OFF durante o ciclo de trabalho exceto em caso de emergncia, porque isso provoca uma carga excessiva s unidades mecnicas. Em casos normais pare o movimento do rob usando primeiro a parada externa HOLD e logo posicionando em OFF a alimentao do motor. $31',&( +2/' (;7(512 3(5,*2$ SDUDGD H[WHUQD +2/' SiUD R PRYLPHQWR GR URE{ EORTXHDQGRR FRP R IUHLR $ DOLPHQWDomR GR PRWRU SRUpP ILFD HP 21 3RVLFLRQH D DOLPHQWDomR HP 2)) DQWHV GH HQWUDU GHQWUR GR UDLR GH DomR GR URE{
A parada externa HOLD pra imediatamente o rob, que mantm sua posio com o freio ativado. vlida somente na modalidade automtica (repeat). As operaes manuais na modalidade de programao so possveis mesmo na condio de HOLD externo.(P FRQGLomR GH +2/' H[WHUQR RV VLQDLV GH RXWSXW SURFHGHQWHV GR URE{ DGTXLUHP R HVWDGR VHJXLQWH 7RGRV RV VLQDLV 2; GRV GDGRV DX[LOLDUHV YLUDP 2)) 2V VLQDLV GH EORTXHLR SDUD URE{V GH PDQLSXODomR H R VLQDO 287 QmR GHILQLGR QD LQVWUXomR 5810$6. RX QR FRPDQGR 6,*1$/ GD OLQJXDJHP $6 QmR PXGDP $SyV GHL[DU D SDUDGD H[WHUQD GH +2/' R URE{ UHFRPHoDUi R PRYLPHQWR GH RQGH SDURX H RV VLQDLV 2; YROWDUmR DR HVWDGR GH 21 &DVR R LQtFLR GH FLFOR VHMD SRVLFLRQDGR HP 2)) SRU H[HPSOR HVWDEHOHFHQGR D PRGDOLGDGH GH SURJUDPDomR DQWHV GH GHL[DU R +2/' VHUi QHFHVViULR YROWDU D SRVLFLRQDU HP 21 R LQtFLR GH FLFORA-1
&8,'$'2
Controlador Srie D Apndice 2. Funo de seleo do programa externo Rob Kawasaki Manual I/O externos $31',&( )81d2 '( 6(/(d2 '2 352*5$0$ (;7(512 possvel mudar um programa do exterior usando as seguintes modalidades: 1. a instruo IF no programa AS 2. a funo RPS (sinal dedicado ao software) 3. a funo JUMP (sinal dedicado ao software) ,QVWUXomR ,) HP $6 A instruo IF avalia o cdigo do sinal de seleo e solicita o programa apropriado (sem usar a funo RPS).Progr. princ. pg00
)XQomR 536 Depois de completada a execuo do programa no passo onde est atribudo END, selecionado outro programa.Progr. princip. pg1 END Progr. princip. pg3
)XQomR -803 No meio do programa, avalia se continuar a execuo do programa (JUMP OFF) ou ir para outro programa (JUMP ON) no passo em que est atribudo JUMP.Programa pg2 O N
Jump
pg01
END Progr. princip. pg5 END
OFF END
pg02
pg08
Abaixo, o nmero de programa externo (RPSxx) est configurado 0 em END.pg0 END pg3 END
Programa pg5 END
pg10
pg1 END
pg5 END
A-2
Controlador Srie D Apndice 2. Funo de seleo do programa externo Rob Kawasaki Manual I/O externos $31',&( 352*5$0$ 87,/,=$d2 '$ ,16758d2 ,) 3$5$ 08'$5 '(
Usando as instrues AS como indicado a seguir, possvel selecionar um programa a solicitar. lido o cdigo do sinal especificado pela funo BITS e segundo esse cdigo a instruo IF solicita o programa selecionado. Exemplo de programa .PROGRAM pg00() 100 HOME WAIT SIG(1009)
.END
; Desloca-se na posio home ; Aguarda o sinal de input IN9 (sinal de seleo de programa OK do dispositivo externo) TWAIT 0.1 ; Espera 0,1 segundos (tempo estabelecido para o sinal de input IN10-13) pg.no = BITS(1010,4) ; Sinal de seleo do programa (IN10-13) IF pg.no = = 1 THEN ; CALL pg1 ; END ; IF pg.no = = 2 THEN ; Solicita o programa de trabalho segundo o cdigo de input CALL pg2 ; END ; IF pg.no = = 8 THEN ; CALL pg8 ; END ; IF pg.no = = 10 THEN ; CALL pg10 ; END ; GOTO 100
No programa de exemplo anterior foram utilizadas as instrues da linguagem AS SIGNAL, BITS e IF.THEN.. END. Tambm podem ser utilizadas BITS e CASE..VALUE..END, ou EXTCALL. Para mais informaes, consulte o Manual de Referncia da Linguagem AS.
A-3
Controlador Srie D Apndice 2. Funo de seleo do programa externo Rob Kawasaki Manual I/O externos $31',&( 87,/,=$d2 '$ )81d2 536 3$5$ 08'$5 '( 352*5$0$ Para mudar de programa usando a funo RPS so utilizados os seguintes sinais dedicados ao software. Para usar estes sinais ser necessrio que sejam anteriormente definidos como sinais dedicados pelas funes auxiliares A-0601 (input) e A-0602 (output) ou pelo comando DEFSIG. Seleo externa do Tem o output quando a modalidade de seleo externa do programa habilitada (RPS) programa est configurada como ativa (RPS ativa). (External program selection effective) Indica que o rob est pronto para mudar de programa. O RPS-ST output ocorre quando executa o passo onde est atribudo END com modalidade RPS vlida. Output Permite ir para o programa estabelecido pelos sinais de seleo de programa. Quando o sinal for ON no passo onde est atribudo END com modalidade RPS vlida, a mudana de programa ocorrer segundo o nmero de programa (RPSxx). Estabelece os sinas de seleo de programa do exterior. A mudana de programa baseada em estes sinais. O nmero de sinais a utilizar tambm pode ser estabelecido.
RPS-ON
Input
Nmero de programa externo (RPSxx)(External program number)
Estabelece o reincio desde o primeiro passo do programa principal do exterior. Caso o sinal seja enviado durante o Reset externo do ciclo automtico, ser executada uma parada do ciclo. Se programa a modalidade RPS for vlida (modalidade de seleo (EXT. PROGRAM RESET) externa do programa), o nmero de programa externo (RPSxx) que foi estabelecido ao envio do sinal lido e o programa principal reinicia desde o primeiro passo. Tabela do cdigo RPS (exemplo de uso com 7 bits)Programa Sinal
RPS1
RPS2
RPS4
RPS8
RPS16
RPS32
RPS64
PG0 PG1 PG2 PG3 : : PG15 PG16 : : PG99 : ON
A-4
: OFF
Controlador Srie D Apndice 2. Funo de seleo do programa externo Rob Kawasaki Manual I/O externos O exemplo acima descrito utiliza um cdigo binrio de 7 bits. Pode ser usado tambm o cdigo BCD (cdigo decimal binrio). (Em alguns casos possvel utilizar somente o cdigo binrio, dependendo do software AS.) &8,'$'2
3* H 3* QmR VmR R PHVPR QRPH GH SURJUDPD &DVR TXHLUD VHOHFLRQDU XP SURJUDPD H[WHUQR FRP RV FyGLJRV 536 GH D GHYHUmR VHU DWULEXtGRV FRP RV QRPHV GH SURJUDPD 3* H GH 3* D 3* QmR SRGH VHU XWLOL]DGR QD IXQomR 536 7HPSRUL]DomR GR VLQDO Nesta seo descrita a temporizao do sinal para a seleo de um programa atravs de PS. Passo em que est atribudo END (exemplo: PG1) [Rob] RPS-ST (output) [Externo] RPSxx (input) Primeiro passo (exemplo: PG3)
RPS-ON (input) Mnimo 100 ms Quando for executado o passo onde est atribudo END com a modalidade RPS ativa, ser emitido pelo rob um sinal RPS-ST de consenso ao input do programa. Logo estabelea o nmero de programa RPSxx no dispositivo externo (painel de interface, etc.) e emita o sinal RPS-ON, sinal de consenso leitura dos sinais RPS, aps um tempo de 100 ms no mnimo desde a configurao do sinal RPS. O controlador confirma o sinal RPS-ON aps a coincidncia dos eixos com o ponto END atribudo, l os sinais RPSxx e estabelece internamente o seguinte programa de execuo. Finalmente, estabelece RPS-ST em OFF. Mantm RPS-ON e os sinais RPSxx at RPS-ST ser posicionado em OFF. &8,'$'2 &DVR RV VLQDLV 536[[ QmR HVWHMDP GHILQLGRV TXDQGR R VLQDO 53621 IRU HPLWLGR SHOR GLVSRVLWLYR H[WHUQR RFRUUHUi XP HUUR GH OHLWXUD GR VLQDO 536[[ TXH GHWHUPLQDUi XP HUUR QD VHOHomR GR SURJUDPD
A-5
Controlador Srie D Apndice 2. Funo de seleo do programa externo Rob Kawasaki Manual I/O externos 6HTrQFLD GD VHOHomR GR SURJUDPD FRP D IXQomR 536 RPS-ST ONRPS-ON ?
ON Reading RPSxx Switching program RPS-ST OFF
OFF
$31',&( 87,/,=$d2 '$ )81d2 -803 3$5$ 08'$5 '( 352*5$0$ Para mudar programa com a funo JUMP utilize os seguintes sinais dedicados ao software. Para usar esses sinais ser necessrio que sejam previamente definidos como sinais dedicados pelas funes auxiliares A-0601 (input) e A-0602 (output) ou pelo comando DEFSIG. Indica que o rob est pronto para mudar de programa. O output ocorre no passo onde est atribudo JUMP ou a instruo EXTCALL com modalidade RPS vlida. Permite executar a passagem ao programa estabelecido pelo sinal de seleo do programa externo. Quando este sinal de input estiver em ON no passo onde se encontra atribudo JUMP e a modalidade RPS for ativa, a mudana de programa ocorrer segundo o nmero de programa (RPSxx). A mudana de programa no ocorrer e a execuo avanar para o passo seguinte, quando este sinal for definido no passo onde se encontra atribudo JUMP com a modalidade RPS vlida. Estabelece o sinal de seleo de programa de um dispositivo externo em cdigo binrio. A mudana de programa ocorre conforme este sinal. O nmero de bits pode ser estabelecido segundo o nmero de programas externo. Output Input
JUMP-ST
JUMP-ON
JUMP-OFF
Nmero de programa externo (RPSxx)
(External program number)
A-6
Controlador Srie D Apndice 2. Funo de seleo do programa externo Rob Kawasaki Manual I/O externos 6HTrQFLD GD IXQomR -803JUMP-ST ON JUMP-ON ? ON Reading RPSxxCurrent program = Requested program ?
OFF JUMP-OFF ? ON Same OF F
=
Switching program
127$
Programa em curso: pr. atualmente em execuo. Programa solicitado: n. do programa lido por RPSxx.
JUMP-ST OFF
127$ Com a instruo EXTCALL, aparecer a seguinte mensagem de erro: (P1014) Cannot execute because the program is already in use (Impossvel executar, o programa j est sendo usado). 1. Caso sejam inseridos quer JUMP-ON quer JUMP-OFF, a prioridade dada a JUMP-ON. 2. Se o nmero do programa atual igual quele do programa solicitado, JUMP-ON no executa a mudana de programa. 7HPSRUL]DomR GR VLQDO Nesta seo descrita a temporizao do sinal para a seleo de um programa atravs da funo JUMP. 7HPSRUL]DomR GR VLQDO HVWDEHOHFLGR SHOD IXQomR -803 Passo em que est atribudo JUMP (exemplo: PG2) Primeiro passo (exemplo: PG5)
[Rob] JUMP-ST (output) [Externo] RPSxx (input) JUMP-ON (input)
Mnimo 100 ms JUMP-OFF (input)
(ON) (OFF)
A-7
Controlador Srie D Apndice 2. Funo de seleo do programa externo Rob Kawasaki Manual I/O externos Quando for executado o passo onde est atribudo JUMP com a modalidade RPS ativa, ser emitido pelo rob um sinal JUMP-ST de consenso ao input do programa. Logo estabelea o nmero de programa RPSxx no dispositivo externo (painel de interface, etc.) e emita o sinal JUMP-ON, sinal de consenso leitura dos sinais RPS, aps um tempo de 100 ms no mnimo desde a configurao do sinal RPS. O controlador confirma o sinal JUMP-ON aps a coincidncia dos eixos com o ponto END atribudo, l os sinais RPSxx e estabelece internamente o seguinte programa de execuo. Finalmente, estabelece JUMP-ST em OFF. Mantm JUMP-ON e os sinais RPSxx at RPS-ST ser posicionado em OFF. 4XDQGR R PRYLPHQWR IRU FRQWtQXR VHP MXPS Passo em que atribudo JUMP (exemplo: PG2) [Rob] JUMP-ST (output) [Externo] RPSxx (input) (ON) (OFF) Passo seguinte (exemplo: PG2)
JUMP-ON (input) JUMP-OFF (input)
A-8
Controlador Srie D Apndice 3. Funo de emisso do sinal de posio home Rob Kawasaki Manual I/O externos $31',&( )81d2 '( (0,662 '2 6,1$/ '( 326,d2 +20( $'9(571&,$ (VWH VLQDO SRGHUi VHU HQYLDGR TXDQGR R VRIWZDUH GHWHUPLQDU TXH FDGD kQJXOR GD MXQWD GR URE{ HVWi SRVLFLRQDGR GHQWUR GD WROHUkQFLD HVSHFLILFDGD EDVHDQGRVH QRV GDGRV GR HQFRGHU PRQWDGR HP FDGD HL[R GR EUDoRURE{ (YLWH XVDU VRPHQWH HVWH VLQDO SDUD R EORTXHLR GH VHJXUDQoD 3DUD PDLRU VHJXUDQoD EORTXHLRV DGLFLRQDLV GH WLSR KDUGZDUH SRU H[HPSOR GH ILP GH FXUVR GHYHULDP VHU LQVWDODGRV SDUD GHWHFWDU D SRVLomR LQLFLDO
Quando o brao-rob estiver dentro da tolerncia da posio inicial, poder ser enviado do exterior um sinal OUT (sendo tanto o campo de tolerncia como o sinal OUT especificados previamente). No sistema esto disponveis dois sinais de posies home (1 e 2) e em cada um pode ser memorizada uma posio inicial.
Posio home Campo de tolerncia da posio home
Posio home
Tolerncia da posio home
: Registra o valor da junta (ngulo) do brao-rob. Quando a posio da junta coincidir com os valores memorizados (dentro da tolerncia), o sinal ser emitido incondicionalmente. : Registra o campo de tolerncia referido ao valor acima registrado para a emisso do sinal de posio home. Expressado em mm. (No deve ser inferior a 1mm.)
O nmero do canal para a emisso do sinal de posio home pode ser registrado atravs da funo auxiliar A-0602 (ou do comando DEFSIG). O ponto da posio home e seu campo de tolerncia podem ser registrados atravs de A-0402 (ou das instrues SETHOME e SET2HOME).
A-9
Controlador Srie D Rob Kawasaki Manual I/O externos
Apndice 4. Bloqueio interno recproco
$31',&( %/248(,2 ,17(512 5(&352&2 Caso os robs estejam instalados um perto do outro, as respectivas zonas de trabalho podem se sobrepor. Nessa situao ser necessrio um bloqueio interno entre os robs (bloqueio recproco). Por exemplo, a rea de interferncia entre os robs A e B representada pela zona escura no desenho seguinte. : rea de interferncia recproca : Indica o ponto (WXa ou WXb) em que o rob deve confirmar que o outro rob est fora da rea de interferncia recproca antes de entrar em essa rea. : Indica uma rea em que os robs enviam os sinais OXa (OXb) que permitem que o outro rob entre na rea de interferncia.
Rob A
Rob B
Visto desde o rob A, 1. O rob A antes de entrar na rea de interferncia confirma, controlando WXa, que o rob B est fora daquela rea (Rob B envia o sinal OXb). 2. Enquanto o rob A se encontra fora da rea de interferncia permite que o rob B entre na rea de interferncia enviando o sinal OXa. &8,'$'2
5HVSHLWH FXLGDGRVDPHQWH D WHPSRUL]DomR GXUDQWH D DWULEXLomR GR VLQDO GH DXWRUL]DomR 2;D 2;E j HQWUDGD QD iUHD GH LQWHUIHUrQFLD
A-10
Controlador Srie D Rob Kawasaki Manual I/O externos
Apndice 4. Bloqueio interno recproco
([HPSOR GH XP FLUFXLWR GH EORTXHLR LQWHUQR UHFtSURFRRob A Rob B
Rob ARUN STOP
Rob BRUN STOP
[ 127$ ] O interruptor RUN/STOP acima indicado no est completamente predisposto para o rob. Os robs A e B aqui descritos so apresentados somente como exemplos fceis de compreender.
A-11
Controlador Srie D Rob Kawasaki Manual I/O externos
Apndice 5. Temporizao dos sinais de bloqueio
$31',&( 7(0325,=$d2 '26 6,1$,6 '( %/248(,2 $3/,&$7,926 '( 0$1,38/$d2 1mR SRVLFLRQH HP 2)) D DOLPHQWDomR GH FRQWUROH GR URE{ GXUDQWH DV RSHUDo}HV GH PDQLSXODomR 4XDQGR D DOLPHQWDomR GH FRQWUROH HVWi GHVOLJDGD WRGRV RV VLQDLV GH RXWSXW LQFOXLQGR RV VLQDLV GH EORTXHLR YLUDP 2)) &DVR XP VLQDO GH EORTXHLR VHMD SHUGLGR GXUDQWH XPD RSHUDomR GH PDQLSXODomR D SLQoD SRGH OLEHUWDU R REMHWR TXH HVWi VHJXUDQGR SURYRFDQGR SUHMXt]RV PDWHULDLV RX DFLGHQWHV DR SHVVRDO Os sinais de bloqueio definidos atravs da funo auxiliar 0605 (ou do comando CLAMP) so usados para finalidades diferentes segundo a aplicao: por exemplo, para o controlo das pinas em operaes de manipulao. Isso possvel somente nos modelos de rob que podem definir os sinais de bloqueio da garra como sinais dedicados. As vlvulas solenides para o controle da garra usadas nos aplicativos de manipulao so opcionais. Caso use a cablagem interna no brao-rob para ligar a vlvula solenide, ser necessrio estabelecer tanto os detalhes do software (funo auxiliar A-0610 Caractersticas dos dispositivos de bloqueio) como o jumper na placa 1GW/1HW. 1D PRGDOLGDGH GH SURJUDPDomR DXWRDSUHQGL]DJHP O sinal selecionado ativado e posicionado em ON/OFF pressionando A + CLAMP na unidade porttil de programao. 6ROHQyLGH VLPSOHV 'HILQLQGR R VLQDO GH EORTXHLR FRPR XP RXWSXW H EORTXHLR 21 A + CLAMP CLAMP (ON) 6ROHQyLGH VLPSOHV 'HILQLQGR R VLQDO GH EORTXHLR FRPR XP RXWSXW H EORTXHLR 2)) A + CLAMP CLAMP (OFF) 6ROHQyLGH GXSOR A + CLAMP CLAMP (ON) CLAMP (OFF) $'9(571&,$
A-12
Controlador Srie D Rob Kawasaki Manual I/O externos 1D PRGDOLGDGH DXWRPiWLFDGH FRQWUROHCLAMP OFF
Apndice 5. Temporizao dos sinais de bloqueio
CLAMP OFF
CLAMP ON
CLAMP ON
CLAMP OFF
CLAMP (ON) CLAMP (OFF) (Solenide duplo) CLAMP (ON) e CLAMP (OFF) no desenho anterior indicam a temporizao para os sinais de bloqueio da garra que foram previamente definidos. O nmero mximo de sinais de bloqueio que podem ser definidos 8. Para os dispositivos de bloqueio de 1 a 7, os cabos dos sinais so cablados dentro do brao-rob.
A-13
Controlador Srie D Rob Kawasaki Manual I/O externos
Apndice 6. Sinais dedicados por tipo de aplicao
$31',&( 6,1$,6 '(',&$'26 325 7,32 '( $3/,&$d2 $31',&( '(),1,d2 '26 -803(56
Defina os jumpers na placa 1GW/1HW como mostrado no desenho seguinte. J3 ABC 1 2 3 4 5 6 J4 ABC 1 2 3 4 5 6 J5 ABC 1 2 3 4 5 Placa 1GW/1HW
A-14
Controlador Srie D Rob Kawasaki Manual I/O externos $31',&( 0$1,38/$d2
Apndice 6. Sinais dedicados por tipo de aplicao
6LQDLV GH LQSXW GHGLFDGRV j PDQLSXODomR 1RPH GR VLQDOControl power ON/OFF Motor power ON
H : Sinal dedicado ao hardware S : Sinal dedicado ao software )XQomR 7LSR GH VLQDO
Alimentao ON/OFF
H H H H S S S S S S S S S S
Veja item 2.1 Sinais dedicados ao hardware Veja item 2.1 Sinais dedicados ao hardware Veja item 2.1 Sinais dedicados ao hardware Veja item 2.1 Sinais dedicados ao hardware Veja item 2.2 Sinais dedicados ao software (No necessrio se utilizar sinais dedicados ao hardware) Veja item 2.2 Sinais dedicados ao software Veja item 2.2 Sinais dedicados ao software Veja item 2.2 Sinais dedicados ao software Veja item 2.2 Sinais dedicados ao software Veja item 2.2 Sinais dedicados ao software Veja item 2.2 Sinais dedicados ao software Veja item 2.2 Sinais dedicados ao software Veja item 2.2 Sinais dedicados ao software Veja item 2.2 Sinais dedicados ao software &8,'$'2
Alim. do motor ON Circuito de seg. OFF HOLDAlim. ext. motor. ONExternal motor power ON
Safety circuit OFF
Reset de erro externoExternal error reset External cycle start
Incio de ciclo externo Reset de programa ext.External program reset
JUMP-ON JUMP-OFF RPS-ON RPSxxExternal HOLD
HOLD externoMod. autom. lenta ext.External slow repeat mode
4XDQGR XWLOL]DU VLQDLV GR VHQVRU HVWDEHOHoD D FDEODJHP LQWHUQD WDQWR FRPR VHQGR XVDGD FRPR QmR SHOD IXQomR DX[LOLDU $ 8VDQGR D FDEODJHP LQWHUQD RV Q~PHURV GH VLQDO VmR DXWRPDWLFDPHQWH DWULEXtGRV D ,1 &DVR QmR XWLOL]H D FDEODJHP LQWHUQD XVR GD FDEODJHP H[WHUQD DWULEXD Q~PHURV GH VLQDO DUELWUiULRV FRPR VLQDLV JHQpULFRV
A-15
Controlador Srie D Apndice 6. Sinais dedicados por tipo de aplicao Rob Kawasaki Manual I/O externos 6LQDLV GH RXWSXW GHGLFDGRV j PDQLSXODomR H : Sinal dedicado ao hardware S : Sinal dedicado ao software 7LSR GH 1RPH GR VLQDO )XQomR VLQDO Output do comutador TEACH/REPEAT H Veja item 2.1 Sinais dedicados ao hardwareTEACH/REPEAT switch output
Output de presena de erro Alimentao do motor em ONMotor power ON Error occurrence output
H S S S S S S S S S S S S
Veja item 2.1 Sinais dedicados ao hardware Veja item 2.2 Sinais dedicados ao softwareVeja item 2.2 Sinais dedicados ao software (No necessrio se utilizar sinais ded