Embed Size (px)
Citation preview

SEM0104 SEM0104 -- Aula 7Aula 7
Equacionamento de Equacionamento de MecanismosMecanismosMecanismosMecanismos
Prof. Dr. Marcelo Prof. Dr. Marcelo BeckerBeckerSEM - EESC - USP

•• Notação ComplexaNotação Complexa
• Equacionamento de Links
• Mecanismos Simples
Sumário da AulaSumário da Aula
• Mecanismos Simples
• Mecanismos Complexos
• Bibliografia Recomendada
EESC-USP © M. Becker 2008 2/36

Notação ComplexaNotação Complexa
• Formas de representação:
– Exponencial
R = OP.e iθPIm
– Senos e Cosenos
R = OP.e iθ
R = OP.(i.sin θ + cos θ)
ORe
R θ
EESC-USP © M. Becker 2008 3/36

•• Notação ComplexaNotação Complexa
•• Equacionamento de LinksEquacionamento de Links
• Mecanismos Simples
Sumário da AulaSumário da Aula
• Mecanismos Simples
• Mecanismos Complexos
• Bibliografia Recomendada
EESC-USP © M. Becker 2008 4/36

• Derivada Primeira
– Exponencial
R = OP.iθ.e iθ.
. PIm
EquacionamentoEquacionamentoLinks RígidosLinks Rígidos
– Senos e Cosenos
R = OP.iθ.e iθ
R = OP.θ.(i.cos θ - sin θ).
. ORe
R θR.
EESC-USP © M. Becker 2008 5/36

• Derivada Segunda
– Exponencial
R = OP.(i2θ2.e iθ + iθ.e iθ ).
..
..
....
PIm
EquacionamentoEquacionamentoLinks RígidosLinks Rígidos
– Senos e Cosenos
Rt
..
Rn
..
ORe
R θRt
..
Rn
..
R = - OP.θ2.(cos θ + i.sin θ)+ OP.θ.(i.cos θ − sin θ)
..
.
..
EESC-USP © M. Becker 2008 6/36

• Determinação do Módulo de R:..
PIm
..
R = - OP.(θ2.sin θ + θ.cos θ).
..
..
RRe = - OP.(θ2.cos θ - θ.sin θ). ..
EquacionamentoEquacionamentoLinks RígidosLinks Rígidos
Rn
Re
R θRt
..
..
OR..
β
RIm = - OP.(θ2.sin θ + θ.cos θ).
..
..
RIm +..
R = ..
RRe
..
2 2
EESC-USP © M. Becker 2008 7/36

• Determinação da fase de R:..
PIm
EquacionamentoEquacionamentoLinks RígidosLinks Rígidos
..
R
Rn
Re
R θRt
..
..
OR..
β
..
tan(β) = RIm
RRe
EESC-USP © M. Becker 2008 8/36

EquacionamentoEquacionamentoLinks não RígidosLinks não Rígidos
• Formas de representação:
– Exponencial
R1 = R1.e iθ1Im A
– Senos e Cosenos
R1 = R1.e iθ1
R1 = R1.(i.sin θ1 + cos θ1)
ORe
R1
θ1
A
EESC-USP © M. Becker 2008 9/36

• Derivada Primeira
– Exponencial
AIm
EquacionamentoEquacionamentoLinks não RígidosLinks não Rígidos
R1 = R1.iθ1.e iθ1 + R1.eiθ1
.. .
. .
– Senos e CosenosO
Re
R1θ1R1t
.
R1n
.
R1t
.
R1n
.
R1 = R1.θ.(i.cos θ - sin θ)+ R1.(cos θ + i.sin θ)
..
.
EESC-USP © M. Becker 2008 10/36

• Derivada Segunda
– Exponencial
EquacionamentoEquacionamentoLinks não RígidosLinks não Rígidos
..
...
Rt
..
AIm
R1 = R1.(i2θ1
2.e iθ1 + i.θ1.e iθ1 )+ R1.(i.θ1.e iθ1 + e iθ1 )+ R1.i.θ1.e iθ1
..
...
t
Rn
..
.. .
.
ORe
R1
θ1R1t
..
R1n
..
EESC-USP © M. Becker 2008 11/36

• Derivada Segunda
– Seno e Coseno
A
O
Im
R1
θ1R1t
..
EquacionamentoEquacionamentoLinks não RígidosLinks não Rígidos
ORe
R1n
..
R = - R1.θ12.(cos θ1 + i.sin θ1) +...
...+ R1.θ1.(i.cos θ1 − sin θ1) +...
...+ 2.R1.θ1.(i.cos θ1 - sin θ1) +...
...+ R1.(i.sin θ1 + cos θ1)
..
.
..
.
..
EESC-USP © M. Becker 2008 12/36

•• Notação ComplexaNotação Complexa
•• Equacionamento de LinksEquacionamento de Links
•• Mecanismos SimplesMecanismos Simples
Sumário da AulaSumário da Aula
•• Mecanismos SimplesMecanismos Simples
• Mecanismos Complexos
• Bibliografia Recomendada
EESC-USP © M. Becker 2008 13/36

EquacionamentoEquacionamento4 Barras 4 Barras -- PosiçãoPosição
R R
R3
Im
R2 R4
R1x
R1y
Re
R2 + R3 + R4 = R1y + R1x
EESC-USP © M. Becker 2008 14/36

EquacionamentoEquacionamento4 Barras 4 Barras -- PosiçãoPosição
R R
R3
Imθ4
θ3R2 R4
R1x
R1y
Re
R2.(cosθ2 + i.sinθ2) + R3.(cosθ3 + i.sinθ3) + ...
... + R4.(cosθ4 + i.sinθ4) = -i.R1y + R1x
θ3
θ2θ1y
EESC-USP © M. Becker 2008 15/36

• 1o Determinar os ângulos
B
L2: link motor
L1: solo
L : link acoplador
EquacionamentoEquacionamentoMecanismos Simples Mecanismos Simples –– 4 Barras4 Barras
R2R4
R1
R3
O2
O4
A
B
θ2δ
θ3
γγγγ
L3: link acoplador
L4: link seguidor
θ2: âng. da barra motriz
δ: âng. da barra seguidora
θ3: âng. da barra acopladora
γ: âng. de transmissão
EESC-USP © M. Becker 2008 16/36

• Aplicar Lei dos Cosenos
B
ABO4
EquacionamentoEquacionamentoMecanismos Simples Mecanismos Simples –– 4 Barras4 Barras
R2R4
R1
R3
O2O4
A
B
θ2δ
γγγγ
αααα
β
AO2O4
EESC-USP © M. Becker 2008 17/36

• Mecanismos “Cruzados”
EquacionamentoEquacionamentoMecanismos Simples Mecanismos Simples –– 4 Barras4 Barras
• “Descruzar” o Mecanismo e seguir o equacionamento
EESC-USP © M. Becker 2008 18/36

EquacionamentoEquacionamento4 Barras 4 Barras -- VelocidadeVelocidade
R R
R3
Imθ4
θ3R2 R4
R1x
R1y
Re
θ3
θ2θ1y
R2.θ2.(-sinθ2 + i.cosθ2) + R3.θ3.(-sinθ3 + i.cosθ3) + ...
... + R4.θ4.(-sinθ4 + i.cosθ4) = 0
. .
.
EESC-USP © M. Becker 2008 19/36

• Dividir em Re e Im
EquacionamentoEquacionamento4 Barras 4 Barras -- VelocidadeVelocidade
R2.θ2.(-sinθ2 + i.cosθ2) + R3.θ3.(-sinθ3 + i.cosθ3) + ...
... + R4.θ4.(-sinθ4 + i.cosθ4) = 0
. .
.
R2.θ2.cosθ2 + R3.θ3.cosθ3 + R4.θ4.cosθ4 = 0. ..
-R2.θ2.sinθ2 - R3.θ3.sinθ3 - R4.θ4.sinθ4 = 0. ..
Re
Im
EESC-USP © M. Becker 2008 20/36

EquacionamentoEquacionamento4 Barras 4 Barras -- AceleraçãoAceleração
R R
R3
Imθ4
θ3R2 R4
R1x
R1y
Re
θ3
θ2θ1y
R2.θ2.(-sinθ2 + i.cosθ2) + R3.θ3.(-sinθ3 + i.cosθ3) + ...
... + R4.θ4.(-sinθ4 + i.cosθ4) – R2.θ22.(cosθ2 + i. sinθ2) -...
... - R3.θ32.(cosθ3 + i. sinθ3) – R4.θ4
2.(cosθ4 + i. sinθ4) = 0
.. ..
.. .
. .
EESC-USP © M. Becker 2008 21/36

• Dividir em Re e Im
EquacionamentoEquacionamento4 Barras 4 Barras -- AceleraçãoAceleração
R2.θ2.(-sinθ2 + i.cosθ2) + R3.θ3.(-sinθ3 + i.cosθ3) + ...
... + R4.θ4.(-sinθ4 + i.cosθ4) – R2.θ22.(cosθ2 + i. sinθ2) -...
... - R3.θ32.(cosθ3 + i. sinθ3) – R4.θ4
2.(cosθ4 + i. sinθ4) = 0
.. ..
.. .
. .
Re
Im
... - R3.θ3 .(cosθ3 + i. sinθ3) – R4.θ4 .(cosθ4 + i. sinθ4) = 0
.. .. ..
-R2.θ2.sinθ2 - R3.θ3.sinθ3 - R4.θ4.sinθ4 – ...
... - R2.θ22.cosθ2 - R3.θ3
2.cosθ3 - R4.θ42. cosθ4 = 0
.. .
R2.θ2.cosθ2 + R3.θ3.cosθ3 + R4.θ4.cosθ4 –...
... – R2.θ22.sinθ2 -R3.θ3
2.sinθ3 – R4.θ42.sinθ4 = 0
.. .. ..
.. .
EESC-USP © M. Becker 2008 22/36

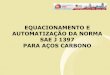
Mecanismos SimplesMecanismos SimplesBielaBiela--ManivelaManivela
• Exemplos de Aplicação: Motores de Combustão Interna, Máquinas Ferramenta, Compressores, etc.
• Deslocamento do Pistão
• Velocidades
• Aceleração
ManivelaPistão
Biela
EESC-USP © M. Becker 2008 23/36

Mecanismos SimplesMecanismos SimplesBielaBiela--ManivelaManivela
• Equacionamento
A
BR3
O2
BR2
R1
EESC-USP © M. Becker 2008 24/36

Mecanismos SimplesMecanismos SimplesBielaBiela--ManivelaManivela
• Equacionamento
A
BR3
θθθθ3333
O2
B
θθθθ2222
R2
R1
R2 + R3 = R1EESC-USP © M. Becker 2008 25/36

Mecanismos SimplesMecanismos SimplesBielaBiela--Manivela Manivela -- PosiçãoPosição
• Equacionamento
A
BR3
θθθθ3333
O2
B
θθθθ2222
R2
R1
R2.(cosθ2 + i.sinθ2) + R3.(cosθ3 + i.sinθ3) = R1
EESC-USP © M. Becker 2008 26/36

Mecanismos SimplesMecanismos SimplesBielaBiela--Manivela Manivela -- VelocidadeVelocidade
• Equacionamento
A
BR3
θθθθ3333
O2
B
θθθθ2222
R2
R1
R2.θ2.(i.cosθ2 - sinθ2) + R3.θ3.(i.cosθ3 - sinθ3) = R1
. . .
EESC-USP © M. Becker 2008 27/36

• Dividir em Re e Im
EquacionamentoEquacionamentoBielaBiela--Manivela Manivela -- VelocidadeVelocidade
. .
R2.θ2.(i.cosθ2 - sinθ2) + R3. θ3.(i.cosθ3 - sinθ3) = R1
.
R2.θ2.cosθ2 + R3.θ3.cosθ3 = 0. .
Re
Im
-R2.θ2.sinθ2 - R3.θ3.sinθ3 = R1
. ..
EESC-USP © M. Becker 2008 28/36

Mecanismos SimplesMecanismos SimplesBielaBiela--Manivela Manivela -- AceleraçãoAceleração
• Equacionamento
A
BR3
θθθθ3333
O2
B
θθθθ2222
R2
R1
R2.θ2.(-sinθ2 + i.cosθ2) + R3.θ3.(-sinθ3 + i.cosθ3) -...
...- R2.θ22.(cosθ2 + i.sinθ2) - R3.θ3
2.(cosθ3 + i.sinθ3) = R3
.. ..
.. ..
EESC-USP © M. Becker 2008 29/36

• Dividir em Re e Im
EquacionamentoEquacionamentoBielaBiela--Manivela Manivela -- AceleraçãoAceleração
R2.θ2.(-sinθ2 + i.cosθ2) + R3.θ3.(-sinθ3 + i.cosθ3) -...
...- R2.θ22.(cosθ2 + i.sinθ2) - R3.θ3
2.(cosθ3 + i.sinθ3) = R3
.. ..
....
.. .. .
Re
Im
..
R2.θ2.cosθ2 + R3.θ3.cosθ3 - R2.θ22.sinθ2 -...
...- R3.θ32.sinθ3) = 0
.. .. .
.
.. .
.
-R2.θ2.sinθ2 - R3.θ3.sinθ3 - R2.θ22.cosθ2 -...
...- R3.θ32.cosθ3 = R3
..
EESC-USP © M. Becker 2008 30/36

•• Notação ComplexaNotação Complexa
•• Equacionamento de LinksEquacionamento de Links
•• Mecanismos SimplesMecanismos Simples
Sumário da AulaSumário da Aula
•• Mecanismos SimplesMecanismos Simples
•• Mecanismos ComplexosMecanismos Complexos
• Bibliografia Recomendada
EESC-USP © M. Becker 2008 31/36

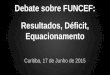
Mecanismos ComplexosMecanismos ComplexosMecanismo ToggleMecanismo Toggle
• Sobrepujar grandes resistências com a aplicação de pequenas forças
• Aplicações:– Prensas
– Travas de Portas
O2
– Travas de Portas
– Etc.
• Barras CB e BO4 com
Mesmo comprimentoO4
A
BC
EESC-USP © M. Becker 2008 32/36

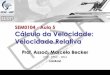
Mecanismos ComplexosMecanismos ComplexosMecanismo ToggleMecanismo Toggle
• Equacionamento
O2F = 2 tan αP
O4
A
BC
αααα αααα
P
F
P
α 0 F oo
EESC-USP © M. Becker 2008 33/36

Mecanismos ComplexosMecanismos ComplexosMecanismo ToggleMecanismo Toggle
• Equacionamento: Dividir em 2 mecanismos Simples
– 4 Barras: O2ABO4
O2
– Biela-Manivela: CBO4
O4
A
BC
αααα αααα
EESC-USP © M. Becker 2008 34/36

•• Notação ComplexaNotação Complexa
•• Equacionamento de LinksEquacionamento de Links
•• Mecanismos SimplesMecanismos Simples
Sumário da AulaSumário da Aula
•• Mecanismos SimplesMecanismos Simples
•• Mecanismos ComplexosMecanismos Complexos
•• Bibliografia RecomendadaBibliografia Recomendada
EESC-USP © M. Becker 2008 35/36

Bibliografia RecomendadaBibliografia Recomendada
• Shigley, JE. e Uicker, JJ., 1995, “Theory of Machines
and Mechanisms”.
• MABIE, H.H., OCVIRK, F.W. “Mecanismos e dinâmica das máquinas”.
• MARTIN, G.H. “Cinematics and dynamics of
EESC-USP © M. Becker 2008 36/36
• MARTIN, G.H. “Cinematics and dynamics of machines”.
• NORTON, R. “Machinery dynamics”.
• Notas de Aula