-
22 SIMPSIO BRASILEIRO DE AUTOMAO INTELIGENTE C EFET-P R, 13 a 15
de Setembro de 1995 Curitiba Paran
FORMACION Y PONDERACION DE TEORIAS COMO PARADIGMA DE APRENDIZAJE
AUTOMATICO
NO SUPERVISADO EN SISTEMAS INTELIGENTES AUTONOMOS
Abstract
Ilariuzzi, H. y Garca Martnez, R.
Laboratorio de Inteligencia Artificial Instituto Tecnolgico de
Buenos Aires
Avenida Madero 399. (1106) Buenos Aires. ARGENTINA. e-mail:
[email protected]
This pape r presents an e~1'Crience with the general
architecture of an autonomous intelligent system with an embeded
unsupervised machine learning mechanism based on theory formation.
The system architecture is described experimental results on its
behavior are presented and limitations of the research and future
trends are discussed.
Resumen
En este trabajo se presenta una arquitectura general de un
sistema inteligente autnomo que incorpora aprendizaje automtico no
supervisado basado en formacin de teorias. Se deseribe la
arquitectura. se presentan resultados experimentales deI
comportamiento y se analizan limitaciones y futuras lneas de
investigacin y desarrollo.
1. Descripcin General de Sistema
1.1 Entorno
Se seleccion el modelo de robot utilizado por Kersten. Koperczak
y Szapakowics [1989]. el cual deseribe el comportamiento de agentes
autnomos frente a diversos escenarios. Para la descripcin deI
modelo de escenarios nos basamos en el modelo sugerido por
[Lozano-Perez y Wesley~ 1979: Iyengar y otros 1985 ~ Gil de
Lamadrid y Gini. 1987~ McKendrick, 1988~ Dudek y otros 1991 ~
Borenstein y Koren, 1991 ~ Evans y otros, 1992]~ los cuales
establecen para estudiar los procesos de aprendizaje. planificacin
y simulacin en un escenario bidimensional. La descripcin deI
entorno puede simularse en una matriz en la que cada elemento
representa una porcin deI espacio, la cual puede ser un obstculo,
un punto de energa o un punto del -espacio transitable por el
robot. Se trabaja la representacin de obstculos en el entorno real
a traves de los obstculos digitalizados en el entorno simulado.
Para la distincin en la simulacin de espacios ocupados por
elementos y espacios libres se opt por configurar a cada elemento
de la matriz en forma binaria.
1.2 Arquitectura
El sistema puede describirse como un robot explorador que
percibe el entorno. A partir de la situacin en la cual se encuentra
el sistema intenta determinar una secuencia de acciones que le
permita alcanzar un objetivo cercano, aI cual llama plano Dicha
secuencia es presentada aI ponderador de planes, quien determina su
aceptabilidad. El controlador de planes en ejecucin se encarga de
verificar que el plan sea cumplido exitosamente. Todo movimiento
-deI robot se acompafia de la deseripcin de su entorno. la
conjuncin de la accin aplicada a dicha deseripcin y obtenida la
situacin resultante hacen aI aprendizaje deI sistema. Si dicho
conocimiento ya fue aprendido se lo refuerza, en otro caso se lo
incorpora y se generan teorias mutantes. A continuacin se presenta
un esquema que resume la arquitectura deI sistema :
-
140
Sistema
Ejecutor
Accin
Controlador de
Planes en Ejecucio
Ponderar
Plan
Sistema
Sensor
Situacin
Armado de
Teoria Local
Teoria Local
SI
NO
PLAN
Reforzar
eoria Rejtistrada
NO
Armar
Plan
1.3 Sistema de Sensoramiento
2' SIMPSIO BRASILEIRO DE AUTOMAAO INTELIGENTE
ENTORNO
SISTEMA
AjUStar
Ponderaci6n de
Teoria similares
T eoriaa Mutantes
Repiltrar-
Ponderar
Retiltnr-
Ponderar
Teoria Local
~.~
El modelado deI sistema sensor fue e~1rado y modificado dei
propuesto por Mahadevan y ConneU [1992c]~ quienes sugerian un
sistema de 24 sectores. distribuidos en tres niveles. Garcia
Martinez sugiri que el modelo deba presentar 8 sectores
constituidos en dos niveles y distribuidos en tres regiones: una
Lateral Izquierda. una Frontal y una Lateral Derecha. La regin
Frontal se encuentra particionada en forma vertical en dos
subregiones. Como anteriormente mencionamos cada regin posee dos
niveles de alcance. un nivel de sensoramiento cercano y un nivel de
sensoramiento lejano. El sistema de sensoramiento posee ocho
sectores~ cada sector se corresponde con una representacin binaria
la cual se rene en un conjunto que nos describe la percepcin de una
situacin.
2. Formacin de Teorias
El modelo de estructura para la formacin de teorias fue sugerido
por Garca Martnez [1991a, 1991b. 1992a, 1992b). EI mismo es una
extensin deI modelo de Fritz [Fritz y otros. 1989]. en el coaI una
unidad de experiencia estaba constituida por:
[Situacin Inicial. Accin. Sitoacin Final].
En trabajos citados, propone el agregado de coeficientes que
permitan determinar la aceptabilidad de una teoria. EI modelo de
experiencia propuesto posee la siguiente estructura:
Ti = rSI.: ~ A.: ~ SF.: ~ p~ K. ul
-
21 SIMPSIO BRASILEIRO DE AUTOMAAO INTELIGENTE
Teora: Ti
K U
Situacin Inicial
Accin
Situacin Final
Cantidad de veces que la teora Ti conc1uy exitosamente ( Arribo
a la situacin final esperada ) . Cantidad de veces que la teoria Ti
se utiliz Nivel de utilidad alcanzado por la situacin final de la
teoria.
141
Hemos asumido para calcular la utilidad de las teorias la frmula
abajo citada. la cual ref1~ja una medida de estimacin de la
distancia deI robot aI punto de energia ms cercano.
Utilidad = 1 D I . Ob + lstancla ~
Conocemos corno DistanciaObj a la distancia que existe entre la
ubicacin actual deI robot y el punto de energa ms cercano. Tal
descripcin de una unidad de experiencia puede ser interpretada
como: Dada la Situacin Inicial percibida por el autmata. en un
instante deI tiempo (llammoslo TI) aplicando una Accin. arribamos a
la Situacin Final (en un espacio deI tiempo T2). Teniendo en cuenta
el modelo de teoria presentado podemos decir que dada una teoria
Ti. las condiciones supuestas Cti de la teora Ti. la accin Ati .
los efectos predichos Eti de la teora, la cantidad de veces que la
teora se aplic con bto P. el nmero de veces que la teoria se aplico
K. siendo S la situacin a la cual se aplic y SI la situacin a la
que se arrib.
3. Planificacin
El planificador es el mecanismo por medio deI cual se vale el
sistema para generar planes. lo que le permitir alcanzar objetivos
de manera ms eficiente. Cada vez que se encuentra en una situacin
particular, trata de armar un plan que aplicado a la situacin
actual alcance una situacin deseable (Punto de energa) . Si dicho
plan existe la situacin deseable se convierte en situacin objetivo.
Eventualmente podra ocurrir que no existiese un plano para lo cual
hay que seleccionar otra situacin como deseable (elemento deI tope
de la pila de situaciones deseables). si ninguno de las situaciones
deseables pueden ser alcanzadas por un plan, entonces se ejecuta
algunas de los planes de contingencias. A partir de todas las
situaciones conocidas el planificador arma la pila de situaciones
deseables. Una situacin es conocida si esta registrada como una
unidad de experiencia deI co~junto de teorias. La pila de
situaciones deseables esta constituda por los efectos predichos de
las teorias que poseen mayor nivel de utilidad adems de encontrarse
ordenada por orden decreciente deI mismo. Cada situacin puede ser
interpretada corno la resultante de baber aplicado una accin a una
situacin previa. Esto determina la precedencia entre las distintas
situaciones. a partir de las cuales se arma el grafo de
situaciones. Una vez armado el grafo se procede a encontrar el plan
entre la situacin actual y las situaciones deseables. De no
encontrarse camino, se toma otra situacin de la pila de situaciones
deseables. as sucesivamente basta que no existan ms situaciones
deseables o se encuentre un plano Si la pila se vaca y no se logro
obtener ningn plano se generan planes por contingencia. Si se
encontr aI menos un plano se lo pondera para obtener su
aceptabilidad. En caso de baber ms de un plan se selecciona aquel
de mayor aceptabilidad.
4. Ponderador de Planes
Si se considera que para un determinado estado deI tiempo el
conjunto de teorias conforma la totalidad de todo el conocirniento
que posee el sistema. El cociente PIK de una teoria dada. es la
probabilidad [Calistri-Yeh. 1990] de que la accin A aplicada a una
situacin Sa d la situacin resultante Sr que verifica los efectos
predecidos de la teoria considerada. Por lo tanto el conocirniento
que el sistema tiene para un instante dado se lo puede pensar corno
la matriz de transicin Mk de la accin Ak, se conforman colocando en
la posicin ( ij ) el cociente PIK de la teoria que posee las
condiciones supuestas Si, los efectos predecidos Sj y la accin
Ak.
-
142
5. Controlador de Planes en Ejecucin
2' SIMPSID BRASILEIRO DE AUTOMAAO INTELIGENTE ~
I~
EI controlador deI plan en ejecucin tiene dos misiones. Si
existe un planen ejecucin y la situacin actual es la situacin que
se esperaba obtener una vez aplicada la accin a la situacin
anterior entonces ordena la siguiente accin deI plan a ser
ejecutada por el sistema. Si existe un plan en ejecucin y la
situacin actual no es la situacin que se esperaba obtener una vez
aplicada la accin a la situacin anterior entonces ordena abortar el
plan en ejecucin y pasa el mando aI planificador deI sistema.
6. Experimentacin.
6.1 Marco General.
En el entorno de simulacin el sistema autnomo demostr capacidad
para comprender y manifestar comportamientos inteligentes a medida
que tomaba conciencia deI marco en que estaba sumergido. Esto puede
explicarse de .Ia siguiente manera cada vez que l robot efecta una
percepcin de su entorno. selecciona y ejecuta la accin que cree ms
adecuada y arriba a una situacin final. 10 que le permite ir
construyendo su base de teoras las cuales se ven reforzadas con el
tiempo. Para la presentacin de los resultados obtenidos en la
experimentacin nos hemos guiado por la estructura propuesta por
Matheus [1990a.1990b].
6.2 Hiptesis
Hiptesis I : Se someter aI sistema a interactuar con su entorno~
observando el comportamiento de aprendizaje a travs de: unidades de
experiencia obtenidas por observacin y generacin de teorias por
diferentes heursticas.
Hiptesis lI: El desenvolvimiento deI sistema aI interactuar con
su entorno queda supeditado a la planificacin para alcanzar
objetivos: su planificacin se basa en las unidades de experiencia
obtenidas por observacin. en teoras generadas por mutacin o en la
conjuncin de las dos anteriores.
6.3 Diseo Experimental.
Los experimentos descriptos en la presente seccin fueron
disefiados para estudiar los efectos de la aplicacin de distintas
configuraciones dei mecanismo de formacin de teorias.
6.3.1 Variables Independientes
Tiempo: Los experimentos para teoras son basados en esta nica
variable independiente. Se define una unidad de tiempo como ellapso
transcurrido entre una percepcin dei entorno y otra. Es una
variable cuantitativa cuyo valor permanece al intervalo (0-8000]
.
Azar: Es una variable cualitativa. Indica que el sistema navega
a travs de decisiones tomadas por azar.
Curiosidad: Es una variable cualitativa. Indica que el sistema
navega a travs de decisiones dirigidas por curiosidad.
Planes (SIM): Esta variable indica que los planes a ejecutar por
el sistema se han generado a partir de teorias que no ban sido
mutadas. Es una variable cualitativa. .
Planes (CIM): Es una variable cualitativa. Indica que los planes
y ejecutados por el sistema provienen de teoras que han sido
mutadas.
Ponderacin: Indica que los planes que se ejecutan han sido
generados a partir de teoras que han sido ponderadas. Es una
variable cualitativa.
% P.E. Base: La misma indica que los planes exitosos deI sistema
se han generados a partir de teorias que no ban sido abstradas oi
ponderadas. Es una variable cualitativa.
-
21 SIMPSIO BRASILEIRO DE AUTOMAAO INTELIGENTE 143
0/0 P.E. CIM: Indica que los planes exitosos deI sistema se han
generado a partir de teoras que han sido mutadas. Es una variable
cualitativa .
. % P.E. CIP: Estavariable indica que los planes exitosos deI
sistema se generan a partir de teoras ponderadas. Es una variable
cualitativa.
% P.E. C(M+P): Esta variable que es cualitativa. indica que los
planes exitosos deI sistema se generan con teoras que han sido
mutadas y ponderadas.
6.3.2 Variables Dependientes.
6.4 Grficas
Cantidad de Teoras
Cantidad de Situaciones
Tiempo Promedio en Alcanzar Objetivos
Porcentaje de Planes Exitosos
Esta variable indica la cantidad de teoras que han sido
reconocidas por el sistema hasta el instante dado por la variable
tiempo. Es una variable cuantitativa cuyo valor pertenece intervalo
[0-2000]. Esta variable indica la cantidad de situaciones
diferentes que han sido reconocidas por el sistema hasta el
instante dado por la variable tiempo. Es una variable cuantitativa
cuyo valor pertenece al intervalo [0-1000]. Esta variable indica la
cantidad promedio de unidades de variable tiempo que han
transcurrido entre dos situaciones las que el sistema alcanzo el
objetivo en el intervalo de tiempo [Tiempo-500, Tiempo]. Es una
variable cuantitativa cuyo valor pertenece aI intervalo [0.20 J.
Esta variable indica el porcentaje promedio de planes exitosos para
que han sido generados por el sistema en el intervalo de tiempo
[Tiempo-500. Tiempo]. Es una variable cuantitativa cuyo valor
pertenece aI intervalo [0,100].
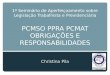
TIEMPO PRONEOIO EN ALCANZAR OElJETPlOS USANDO
Cf)
o ~ ~
AZAR. CURIOSIDAD Y PONOERACION VS TIEMPO
w 18~----------------------------------------~ [i3 o 16-
........................................ '.'.' ............... . rr
~ 14-
...............................................................................
.
(J 12- ' . .il'.~' .. '.".' ..... '.' ... ~'~.'.' ... '.'.'
..... '.'~' ............. ~ 10- ii~ .. ~~~A...& ... ..A ... ni
8-
.....................................................................
o i :~
~~~:~.~~~:~.~~~::~~~.~:~~~~~~~~~~~:~~~~~~~~~~~~:~~~~~~!.~~~~~:~~~ o
. H: 2-
........................................................................
R .. o n. :! w ~
o I I I I I I I I I I I~I I I I O 1(0) 2ID} 3ID) 4OJ) 5(D) uuuu
7IDl 8(D)
500 1500 2fD) 3500 4fiOO 5500 6fiII) 7500 8500 TIEMPO = BOOO
ITEP.ACIONES
.. AZAR '. : CURIOSDAD PONOERACION
Grfica 1: Aqu se observa que bay un periodo inicial en donde el
robot acta mejor por curiosidad que actuando con planes con
ponderacin. Luego de pasado el perodo de inicio (aproximadamente ms
de 2500 iteraciones de la variable tiempo) el tiempo promedio
mejora a la curiosidad notablemente. Es importante destacar que en
ningn momento las actuaciones por planes ponderados superan a las
de azar, si bien aI comienzo poseen los mismos valores.
-
144 ~21~, 21 SIMPSIO BRASILEIRO DE ~ AUTOMAAO INTELIGENTE TIEMPO
PROMEDlO EN ALCANZAR OEi..lETI\tOS USANDO
PLANES SIM. PLANES ClM Y PONDERACION
~ 18------------------------------------------------~ C: ~
UJ
rD O ([
~ ~ -l a=: Z UJ
O UJ :! O [[ o... O o... :! UJ i=
16- ---- ---- ------------ -- -- -------- ---- ------- -------
---- ------- ------- ------ -- -- ----- -----
14- ---__ ----- -- -- ---- -- -- -- -- -- -- ---- -- ------- --
---- ------------------------ ----- ----- ---
12- -- -- -- --~-- -- ---- -- -- -- ------ -- -- -- -- -..
---------------------------------------------
10- ---- -- --'1'X'!'" --.- -- -- -- -- -- -- -- -- -- -- --
----------------- ---- --- -- --- -- -----------------IS:J
8- ---- -- -- ------ ---- -.-- ------ -- -------- ---- -- --
------ ------ -------- ----- ----- -- --- -- ---. ,,,,
................ ....
6- ---- -- -- -- -- -- ---- -- ---- - ---& --~ --
------------------ -------------- --- ----- -_. __ ,- IS:J IS:J
IS:J
4- -- -- -- ---- -- -- ---- -- -- -- ---- --:----- . --
-:;----:~---;----rlS:l--lB:I--.g---&--I:iSI'--1:8:I---
2- -- -- -- -- ------ ---- -- -- -- ---- ---- -- ---- -- ----
---------- -------------------~---- ;;;';;..--"-- ---
0'~~1--T-1-T-1-~1~1r-'1--~1--~1--~1-~1-1r-'1r-'1--~1--~1--~1~ O
1 (Dl 2(D) 3(D) 4(D) 5lD) 6ID) 7IDl fID)
500 1500 2500 3500 oIm) 5500 6500 7500 850J TIEMPO = SOOO
ITEP.ACIONES
, I .... PLANES SIM IS:J PLANES ClM PONDERACION I
Grfica 2: Esta grfica es un contraste entre las actuaciones de
planes sin mutacin. con mutacin y ponderacin, a travs de la cual se
manifiesta que la ponderacin actua mejor que los planes con
rnutacin o sin rnutacin de teorias.
ti'.1
PORCENTAJE DE PLANES EXITOSOS
SIN USAR NADA Y USANDO MUTACION
~~~------------------------------------------~ ~ 45%-- --- ----
------ -- ---- -- -- -- ---- -- -- -- -- ---- -- -- ------ -- -- --
-- ------ -- ---- ---- -- -- -- --o ~ 40*-- ----.. -........ -.....
-.... -......... -.- .... -.. -.. -..... -.. -.... -..... -.. -....
-- ... . ~ J.I)
w ~;;- ----- -- ---- -- -- ---- -- ---- ---- -- -- -------- ----
-------- -- -- _. __ ..... --- _ .. _ ...... __ .-
5 3}%- .. -- ... -.---.---.-----.-- .. - -...... -.-.- .. ---.-
.. -.. -.-.-- ...... -.-. -.-.--- .. -.-.-~ ~{.- _ ... __
............... _ ................ _ ... _ ... _ ...... ~._._-----
.... _ ...... _ .. _._ .. ~ 2(f'k- --- -- --.- -... -- -- -- -- --
-- ---- -- -- ~- -- --.0. -:-~ -- -: -- -- -- -- -- -- --.- -- --
-- ---- -- -- -- --w
~ Z w a:: o !L
15'""*--------------~ .---~--~-~A-A-~-~-*-------.---10%-
---"JJf..--~ .. - -.. ------------------. ---. ---.... -------...
---. --------------------
~k- r- ------ --.- -- ---- -- -- -- -- -- -- ---- ---- -- -- --
-- -- ____ o. -- -"---'-'-'- -- -. -..... -.....
Wk I I I I I I I I I I I I I I I I O ltm 2(D) 301) 4(D) 5ID)
6000 7IDl 8(D)
500 1500 2500 3500 4500 5500 6500 7500 8WJ TIEMPO = 8000
Iteraciones
I .... %SINNADA % CON MUTACION Grfica 3:Corresponde a las
grficas de porcentaje de planes exitosos. Como conc1usin se obtiene
que los rnejores porcentajes se dan cuando el robot acta con
mutacin de teorias.
-
21 SIMPSIO BRASILEIRO DE AUTQMAAO INTELIGENTE
PORCENTAJE DE PLANES EXITOSOS USA.NDO
MUTActON. PONDERACION Y AMBAS
60%~------------------------------------------~ ~~-
-----------------------~---------------- --- -- -- -- -- -- ---- --
-- -- ---- ---- ---. -- ----ro=:'- ---- --- ---- --- -- ---------
--------- --- --'---- ------ -------- -- -----iii --. -----
--------4'~- -------------- ------------------------- -- -- -- ----
-- -- -- ---- -- -- -- -- -- -- -- -. -' -- -' --- [J W~':t - ---.-
------ ,._. -_ .. --- ............ _--- --------- ---- .... -- ....
-- -_ .... -- -..... _ .... -............... _ ...... _ .... _ ..
..
I :::~::~::~:~:~:~:~:~::~::~::~::~::~::~::~::~:: 5'*,-
---~--------------------------------- -- -- -- ------ ------ ----
-- -- -- ---- -- ------ ------(Y~ I I I I I I I I I I I
O 1(11) 2lDl 3D) 4(D) filO) 6(D) 7(D) 8lDl
lO) 1 OO 2fiOO 3500 oWIl 5500 6fiOO 7500 8fD} TIEMPO = 8000
lterscionE!:!
% CON MUTACION % CON PONDERACION % USA.NDO AMBAS
145
Grfica 4: La misma permite observar el contraste entre las
actuaciones de mutacin. ponderacin y una nueva manera de hacer
actuar ai robot que es la utilizacin de mutacin y ponderacin
juntas. de lo que se obtuvo que esta ltima manera de actuacin
mejora aproximadamente en un 10 % los porcentajes de planes
exitosos con respecto a la actuacin de ponderacin.
6.5 Tesis demostradas
EI aprendizaje a partir de la generacin de teoras por dif~rentes
heursticas permite ai sistema autnomo_ comportarse de manera ms
efectiva que haciendo uso solamente de las unidades de experiencia
obtenidas por observacin. Los resultados obtenidos en las grficas I
y 3 corroboran empricamente la tesis mencionada. La incorporacin de
un mecanismo de planificacin y Ponderacin de la aceptabilidad de
planes~ incrementa el nmero de planes concluidos exitosamente. La
corroboracin emprica de dicha tesis se encuentra reflejado en los
resultados obtenidos en las grficas 2 y 4.
7. Limitaciones y Futuras Lneas de Investigacin ~.
Desarrollo
Dentro de las limitaciones podemos citar el inconveniente de no
poder contar con una plataforma robot real. Se ha recurrido a la
simulacin para poder desarrollar el sistema~ simulando el entorno y
los efectos de aplicar determinadas acciones sobre el mismo. Otra
limitacin es el mtodo de percepcin dei entorno, que si bien es til
para el entorno simulado, no significa que se adecue de la misma
manera a un entorno real. Una de las lineas de investigacin que se
plantea es la de trabajar con el mismo sistema en un entorno reaL
contando con una plataforma real con mtodos de sensoramiento para
percibir el entorno. Otra lnea de investigacin es tratar de
disefiar e implementar un mecanismo que le permita ai robot
interactuar ms rpidamente con el entorno.
8. Referencias
BARES, 1.. HEBERT, M., KANADE, T., KROTWOW, E., MITCHEL, T.,
SIMMONS, R. Y WHITIAKER, R. 1989. Ambler: An Autonomous-Robot for
Planetary Exploration. IEEE Computer Vol. 22 N 6 Paginas 18-26.
BLANQUE,1. 1986. La Mente Como un Sistema Ec%gico. Mundo
Informatico. Vol 5 Nro. 122. Bs. As.
-
146 ~, 2! SIMPSIO BRASILEIRO DE AUTOMAAO INTELIGENTE BORENSTEIN,
H. y KOREN. Y. 1991. Histogramc in Aioton Aiappingfor Alobile Robot
ObstacJe
Avoidance. IEEE Transactions on Robotics and Automation.
Volurnen 7. Nber~. DUDEK, G .. JENKIN. M .. MILLOS~ E. y WILKES,D.
1991. Robotics Exploration as graph
ObstacJe Avoidance . . IEEE transactions on Robotics and
Automation VoI. 7 N 6. pp. 859-865. EEUU.
EVANS, 1., KRISHNAMURTY, B .. BARROWS. B . SKEWIS. T. y
LUMELSKY. V. 1992. Handling Real JVorld Motion P/anning: A Hospital
Transport Robot. IEEE Control Systems. Volurnen 12. N 1.
FRITZ, W., 1994. Sistemas Inteligentes A rtiji ci aleS: lntituto
Tecnologico de Buenos Aires. FRITZ, W .. GARCIA MARTINEZ. R.,
BLANQUE, 1.. RAMA A .. ADOBATIL R. y SARNO. M .
1989. The Autonomous Inte/ligent S:vstem. Robotics and
Autonomous Systems. VoI. 5 N 2. pag 109-125. Elsevier.
FRITZ, W .. GARCIA MARTlNEZ~ R. y MARSIGLIO. A. 1990. Sistemas
Inteligentes Artijiciales. C.E.I.L.P. La Plata. Buenos Aires.
GARCIA MARTINEZ, R. 1991a. Un lv/todo de Aprendizaje por Ajuste
de Coejicientes en Sistemas Inteligentes A rtificiales. Anales deI
II Simposio de Inteligencia Artificial y Robotica. Pg. 113-114. Bs.
As.
GARCIA MARTINEZ, R. 1991b. Heursticas de Ajustes de Unidades de
Experiencia para Sistemas Inteligentes Artijicia/es. En Produccin
Cientifica deI Progama IDEIA. Pg. 20-29. Departamento de Ciencias
Basicas. Univ. Nacioanl de Lujn. Bs. As.
GARCIA MARTINEZ. R. 1992a. Aprendizaje Automtico no Supervisado.
Cuademo N 4. Secretaria de Ciencia y Tecnica. Univ. Nacional de
Lujn. Bs. As.
GARCIA MARTINEZ, R. 1992b. Aprendizaje Automatico por Interaccin
con el Entorno. Anales de las fi Jornadas de Pesquisa de UFSM. Pg.
594. Univ. Federal de Santa Maria. Ro Grande do Sul. Brasil.
GARCIA MARTINEZ, R. 1992c. Aprendizaje Basado en Formacin de
Teoras sobre el Efecto de las Acciones en el Entorno. Tesis de
Master. Departamento de Inteligencia Artificial. Facultadad de
Informatica. Univ. Politcnica de Madrid.
GIL DE LAMADRID, 1. 1987. Obstacle avoidance Heuristic for Three
Dimensional Moving Objects. TR 87-42. Computer Science Departament.
Institute of Techonology. University of Minnesota. Estados
Unidos.
GIL DE LAMADRID, 1. Y GINI, M. 1987. Path Tracking for a Mobil
Robot among Moving Obstacle with Unknown Trajectories. TR 87-42.
Computer Science Departament. Institute of Techonology. University
of Minnesota. Estados Unidos.
IYENGAR, S., JORGENSEN, C .. RAO, S. Y WEISBIN, C. 1985. Learned
Navigation Path for a Robot in Unexp/ored terrain. Proceedings of
the Second Conference on Artificial Intelligence Applications. pp.
148-155. IEEE CS Press. Massachusetts. Estados Unidos.
KERSTEN, G., KOPERCZAK, Z. y SZAPAKOWICS, S. 1989. Mode/ling
Autonomous Agents in Changing Enviroments. Computer Science
Departament TR-89-32. Universidad de Otawa. Canad.
LOZANO-PEREZ, T. y WESLEY, M. 1979. An A/gorithm for Planning
Collision Free Paths Among Po/ihedral Obstacles. Communications
ofthe ACM. Volurnen 22 N 10. 1979.
MAHADEV AN, S. y CONNELL, 1. 1992. Automatic Programming of
Behavior-Based Robots using Reinforcement Leaming. Artificial
Intelligence Vol55 pp. 311-365.
MCKENDRICK.1. 1988. Autonomous Know/edge-Based Navegation in
Unknown Two-Dimensional Enviroment. Praceedings of the frrst
Florida Artificial Intelligence Research Symposiurn. pp. 59-63.
University of South Florida. Estados Unidos.
SHEN, H. y SIGNAROWSKI, G. 1985. A Know/edge Representation for
Roving Robots. Proceedings 2nd Congress on Artificial Intelligence
Applications. pp. 621-628.
-,