Embed Size (px)
Citation preview
Simulação numérica do escoamento em torno de um catamaran classe C
Filipe Santos Carvalho
Dissertação para obtenção do Grau de Mestre em
Engenharia Mecânica
Orientadores: Prof. Luís Rego da Cunha de Eça
Dr. Nelson Pereira Caetano Marques
Júri
Presidente: Prof. Viriato Sérgio de Almeida Semião
Orientador: Dr. Nelson Pereira Caetano Marques
Vogal: Dr. Guilherme Nuno Vasconcelos Beleza Vaz
Dezembro 2016

2
i
RESUMO
O presente trabalho tem como objetivo a simulação e análise do comportamento hidrodinâmico de um
catamaran de competição classe C, visando a determinação das forças que atuam na embarcação a diferentes
velocidades, recorrendo à resolução numérica das equações de Navier-Stokes em média temporal de Reynolds.
Na primeira fase do trabalho foi analisado em regime estacionário o escoamento em torno do volume
submerso da embarcação, desprezando os efeitos da superfície livre, modelando-a com uma condição de plano de
simetria. Seguiu-se um procedimento para a verificação dos resultados concluindo-se incertezas numéricas elevadas.
A tipologia da malha e dos modelos físicos selecionados mostraram-se adequados. Analisou-se o impacto do uso do
modelo de previsão laminar-turbulento 𝛾 − 𝑅𝑒𝜃 concluindo-se um impacto global não muito significativo, apesar de
se revelar importante no estudo dos apêndices.
Na segunda fase foi efetuado o cálculo do escoamento em torno do catamaran considerando os efeitos da
superfície livre, utilizando-se o modelo Volume of Fluid e seguindo-se as recomendações do manual do programa
STAR-CCM+ para a construção do modelo computacional. Concluiu-se que a resistência viscosa é dominante
comparativamente à de pressão, diminuindo a importância relativa de efeitos de onda. Por conseguinte, obtiveram-
se variações pequenas dos resultados em relação ao caso sem superfície livre. Foi ainda efetuado o cálculo a
diferentes velocidades de modo a definir a evolução da resistência com o número de Froude.
Os resultados obtidos potenciam a utilização fiável de modelos computacionais sem superfície livre em
trabalhos futuros, permitindo um processo mais eficiente e menos dispendioso computacionalmente.
Palavras-chave: catamaran; superfície livre; Volume of Fluid; RANS

ii

iii
ABSTRACT
The main goal of this work was to study the hydrodynamic performance of a C-Class catamaran, determining
the forces acting on the vessel at different speeds, using RANS equations.
In the first part of the work, it was studied the flow at steady state around the catamaran neglecting free
surface effects, modelling the free surface as a symmetry plane. A verification procedure was conducted leading to
high numerical uncertainties. It was evaluated the suitability of the mesh and physical models’ setup. It was also
evaluated the effectiveness of laminar-transition predication using 𝛾 − 𝑅𝑒𝜃 transition model, showing minor overall
impact on the total resistance, despite the significant impact on the resistance of the catamaran appendices
(daggerboard, rudder and winglets).
In the second part of the work, it was studied the flow at un-steady state around the catamaran considering
free surface effects, using VOF and VOF Waves models and following STAR-CCM+ best practices when setting up the
mesh and the physical models. The results show that viscous resistance is dominant, reducing the overall importance
of wave effects, leading to acceptable differences to the case without free surface effects. Finally, it was evaluated
the performance of the catamaran at different speeds allowing to compute and plot the resistance force with the
Froude number, envisioning a future comparison with wingsail data.
Conclusions of this work present a physical model setup without free surface effects as a reliable basis for
future works, allowing a more efficient process and weightless computational requirements.
Keywords: catamaran; free surface; Volume of Fluid; RANS

iv

v
ÍNDICE
Resumo ........................................................................................................................................................................... i
Abstract ......................................................................................................................................................................... iii
1 Introdução ............................................................................................................................................................. 1
1,1 Motivação e objetivos .................................................................................................................................. 1
1,2 Enquadramento ............................................................................................................................................ 2
1,2,1 Navegar à vela .......................................................................................................................................... 2
1,2,2 Catamaran classe C .................................................................................................................................. 4
1,2,3 Tipos de embarcações .............................................................................................................................. 6
1,2,4 Resistência ................................................................................................................................................ 8
1,3 Metodologia ............................................................................................................................................... 11
1,4 Hipóteses e limitações ................................................................................................................................ 12
1,5 Propriedades de referência ........................................................................................................................ 13
1,5,1 Propriedades termofísicas...................................................................................................................... 13
1,5,2 Referencial ............................................................................................................................................. 14
1,6 Estrutura da dissertação ............................................................................................................................. 15
2 Fundamentos teóricos ......................................................................................................................................... 16
2,1 Equações da dinâmica do fluido ................................................................................................................. 16
2,2 Turbulência ................................................................................................................................................. 17
2,2,1 Modelo de previsão de transição laminar turbulento 𝛄 − 𝐑𝐞𝛉 ............................................................ 20
2,3 Superfície livre ............................................................................................................................................ 20
2,4 Sistema de ondas ........................................................................................................................................ 22
2,5 Verificação da solução ................................................................................................................................ 25
3 Estudo sem superfície livre ................................................................................................................................. 27
3,1 Objetivo ...................................................................................................................................................... 27
3,2 Pré-processamento .................................................................................................................................... 27
3,2,1 Determinação da linha de água ............................................................................................................. 27
vi
3,2,2 Geometria .............................................................................................................................................. 29
3,2,3 Mallha .................................................................................................................................................... 29
3,2,4 Modelos físicos ....................................................................................................................................... 33
3,3 Verificação da solução ................................................................................................................................ 34
3,4 Análise dos resultados de referência.......................................................................................................... 37
3,4,1 Resultados iniciais .................................................................................................................................. 37
3,4,2 Análise do esquema de resolução da camada limite ............................................................................. 44
3,4,3 Análise da previsão da transição laminar-turbulento ............................................................................ 44
3,4,4 Análise aos parâmetros de turbulência .................................................................................................. 50
3,4,5 Análise ao domínio do modelo computacional ...................................................................................... 50
3,4,6 Análise à tipologia da malha .................................................................................................................. 51
4 Estudo com superfície livre ................................................................................................................................. 52
4,1 Objetivo ...................................................................................................................................................... 52
4,2 Pré-processamento .................................................................................................................................... 52
4,2,1 Geometria .............................................................................................................................................. 52
4,2,2 Malha ..................................................................................................................................................... 53
4,2,3 Modelos físicos ....................................................................................................................................... 58
4,3 Análise dos resultados ................................................................................................................................ 62
4,3,1 Resultados iniciais .................................................................................................................................. 62
4,3,2 Comparação dos resultados com o caso sem superfície livre ................................................................ 65
4,3,3 Análise a diferentes velocidades do catamaran .................................................................................... 68
5 Conclusões........................................................................................................................................................... 72
6 Sugestões de trabalhos futuros ........................................................................................................................... 74
7 Referências .......................................................................................................................................................... 75

vii
LISTA DE FIGURAS
Figura 1 - Tipos de perfis alares de uma embarcação à vela. Adaptado de [1] ............................................................. 2
Figura 2 - Triângulo de velocidades do escoamento de uma embarcação à vela.......................................................... 3
Figura 3 - Balanço de forças que atuam numa embarcação à vela. Adaptado de [2].................................................... 3
Figura 4 - Comparação do balanço de forças que atuam numa embarcação monocasco (à esquerda) e numa
embarcação multicasco (à direita) ................................................................................................................................. 4
Figura 5 - Catamaran C-Class da Team Cascais e os seus principais componentes ....................................................... 5
Figura 6 - Evolução da resistência hidrodinâmica de uma embarcação com o número de Froude, para diferentes tipos
de embarcações. Adaptado de [5] ................................................................................................................................. 7
Figura 7 - Evolução das contribuições das parcelas da resistência de onda e resistência viscosa para a resistência total
....................................................................................................................................................................................... 8
Figura 8 – Evolução dos gradientes de velocidades e da camada limite de um escoamento ao longo de uma superfície
....................................................................................................................................................................................... 9
Figura 9 - Distribuição da pressão na superfície de um corpo com e sem os efeitos da camada limite (imagem em
baixo e em cima, respetivamente). Na figura estão igualmente representadas as linhas de corrente do escoamento
onde é visível a alteração da curvatura das mesmas devido ao deficit de caudal na camada limite (espessura de
deslocamento). Adaptado de [5] ................................................................................................................................. 10
Figura 10 - Evolução da resistência de onda com o número de Froude. Adaptado de [2] .......................................... 11
Figura 11 - Geometria em estudo no presente trabalho ............................................................................................. 12
Figura 12 - Localização da origem do referencial ........................................................................................................ 15
Figura 13 – Perfil de velocidades de uma camada limite turbulenta nas coordenadas semilogarítmica da lei da parede.
Adaptada de [9] ........................................................................................................................................................... 19
Figura 14 - Ângulo de contacto. À esquerda a superfície é molhada, enquanto que à direita a superfície é seca pelo
fluido mais denso ......................................................................................................................................................... 22
Figura 15 - Sistema de ondas gerado por uma embarcação em movimento, representando cunha de Kelvin a
componente transversal e divergente do sistema de ondas e os ângulos de direção de propagação. Adaptado de [5]
..................................................................................................................................................................................... 22
Figura 16 - Amplitude do sistema de ondas a diferentes números de Froude. Adaptado de [5] ................................ 23
Figura 17 - Ilustração do transom seco e da onda gerada ........................................................................................... 24
Figura 18 - Geometria utilizada para determinação da linha de água. Na figura está assinala a posição da tripulação
..................................................................................................................................................................................... 28
Figura 19 - Posição da linha de água ............................................................................................................................ 28
Figura 20 – Geometria do catamaran para o estudo sem superfície livre .................................................................. 29

viii
Figura 21 - Distribuição de 𝑦 + na superfície do catamaran, com escala [0,057 ; 1] ................................................. 31
Figura 22 - Regiões cónicas de refinamento ................................................................................................................ 32
Figura 23 - Dimensões do domínio do modelo computacional ................................................................................... 33
Figura 24 - Gráficos de convergência dos resultados de forças. Nos gráficos são apresentados os resultados calculados
para as diferentes malhas, a estimativa da solução exata, a barra de incerteza para a malha mais fina e curva de
convergência de erro. Fx em cima à esquerda; Fy em cima à direita; Fz em baixo ..................................................... 36
Figura 25 - Distribuição de pressão na superfície do catamaran ................................................................................ 38
Figura 26 - Detalhe da distribuição de pressão na superfície do daggerboard (à esquerda) e do rudder (à direita) .. 39
Figura 27 - Distribuição da pressão no plano da superfície livre ................................................................................. 39
Figura 28 - Distribuição da magnitude da tensão de corte na superfície do catamaran ............................................. 40
Figura 29 - Detalhe da distribuição da magnitude da tensão de corte na superfície do daggerboard (à esquerda) e do
rudder (à direita) .......................................................................................................................................................... 40
Figura 30 - Isolinhas de velocidade axial em planos transversais ao escoamento a 0, 1 e 3 distâncias (d0, d1 e d3) do
daggerboard (DB) e rudder(RD). Escala de -5,36 m/s a 0 m/s ..................................................................................... 41
Figura 31 - Distribuição da magnitude da velocidade no plano da superfície livre ..................................................... 42
Figura 32 - Isolinhas de vorticidade em planos transversais ao escoamento a 0, 1 e 3 distâncias (d0, d1 e d3) do
daggerboard (DB) e rudder(RD). Escala de -40 s-1 a 40 s-1 ........................................................................................... 43
Figura 33 - Comparação da distribuição da tensão de corte na superfície do catamaran no caso inicial (à esquerda) e
usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita) .......................................................................................................................... 46
Figura 34 - Comparação da distribuição da tensão de corte na superfície do daggerboard no caso inicial (à esquerda)
e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita). Em cima a distribuição no lado de pressão do perfil. Em baixo a distribuição
no lado de sucção do perfil .......................................................................................................................................... 47
Figura 35 - Comparação da distribuição da tensão de corte na superfície do rudder no caso inicial (à esquerda) e
usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita) .......................................................................................................................... 47
Figura 36 - Comparação da distribuição da tensão de corte na superfície dos winglets no caso inicial (à esquerda) e
usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita) .......................................................................................................................... 48
Figura 37 – Comparação do coeficiente de fricção numa secção transversal da superfície do casco no caso inicial (à
esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita). O eixo das abcissas não está adimencionalizado com o
comprimento do componente e está limitado até a montante da posição do daggerboard ..................................... 48
Figura 38 - Comparação da evolução do coeficiente de fricção numa secção transversal da superfície do daggerboard
no caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita). O eixo das abcissas não está adimencionalizado
com o comprimento do componente .......................................................................................................................... 48
Figura 39 - Comparação da evolução do coeficiente de fricção numa secção transversal da superfície do rudder no
caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita). O eixo das abcissas não está adimencionalizado com
o comprimento do componente .................................................................................................................................. 49
ix
Figura 40 - Comparação da evolução do coeficiente de fricção numa secção transversal da superfície dos winglets no
caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita). O eixo das abcissas não está adimencionalizado com
o comprimento do componente .................................................................................................................................. 49
Figura 41 - Geometria do catamaran para o estudo com superfície livre ................................................................... 53
Figura 42 - Distribuição de 𝑦 + na superfície do catamaran, com escala [1 ; 300] ................................................... 55
Figura 43 - Regiões de refinamento para caracterização da superfície livre. Vista lateral em cima, vista de topo em
baixo ............................................................................................................................................................................. 56
Figura 44 - Medição da secção transversal 𝑆 e do deslocamento máximo do casco 𝐷 para a resolução das equações
(26) a (30) ..................................................................................................................................................................... 57
Figura 45 - Dimensões do domínio do modelo computacional ................................................................................... 58
Figura 46 - Regiões definas onde o VOF Phase Replacement é ativado ...................................................................... 60
Figura 47 - Distribuição da pressão na superfície do catamaran. Os valores apresentados não são relativos à
hidrostática local .......................................................................................................................................................... 63
Figura 48 - Distribuição da magnitude da tensão de corte na superfície do catamaran ............................................. 63
Figura 49 - Padrão de ondas da superfície livre ........................................................................................................... 64
Figura 50 - Detalhe da onda provocada pelo dry transom .......................................................................................... 64
Figura 51 - Distribuição da fração de volume de água na superfície do catamaran ................................................... 65
Figura 52 - Comparação da distribuição de pressão no rudder (lado 1 e 2) para o caso sem superfície livre (SSL) e com
superfície livre (CSL) ..................................................................................................................................................... 68
Figura 53 - Evolução da força de resistência com a velocidade do catamaran ........................................................... 70
Figura 54 - Padrão de ondas da superfície livre a diferentes velocidades ................................................................... 71

x
LISTA DE TABELAS
Tabela 1 - Propriedades do ar e da água do mar (seawater) e condições de referência em que as propriedades foram
avaliadas....................................................................................................................................................................... 14
Tabela 2 - Massas dos componentes do catamaran ................................................................................................... 27
Tabela 3 - Descrição dos tamanhos de elemento (mínimo e target) de linha e superfície da malha definidos .......... 30
Tabela 4 - Parâmetros de definição da camada de prismas ........................................................................................ 31
Tabela 5 - Valores de 𝑦 +mínimo, médio (média de superfície) e máximo por componente do catamaran ............. 32
Tabela 6 - Dimensões características das regiões de refinamento cónicas ................................................................. 32
Tabela 7 - Dimensões do domínio computacional ....................................................................................................... 33
Tabela 8 - Condições de fronteira definidas para o problema..................................................................................... 34
Tabela 9 - Parâmetros de avaliação de qualidade da malha. Os valores representam uma média de superfície para o
catamaran .................................................................................................................................................................... 35
Tabela 10 - Resultados de forças calculados ............................................................................................................... 35
Tabela 11 – Resultados da verificação dos resultados para as variáveis de interesse ................................................ 35
Tabela 12 - Erros relativos dos resultados obtido com a malha ℎ3 em relação a ℎ0 e ℎ1 .......................................... 37
Tabela 13 - Resultado das forças e momentos de interesse calculados, por componente da embarcação ............... 37
Tabela 14 - Comparação das componentes de pressão e viscosa para as forças totais .............................................. 38
Tabela 15 - Comparação de resultados usando os esquemas “all 𝑦 +” e “low 𝑦 +” para a resolução da camada limite
..................................................................................................................................................................................... 44
Tabela 16 - Comparação dos resultados obtidos com a utilização do modelo de transição laminar-turbulento 𝛾 − 𝑅𝑒𝜃
..................................................................................................................................................................................... 45
Tabela 17 - Detalhe por componentes da comparação dos resultados obtidos com a utilização do modelo de transição
laminar-turbulento 𝛾 − 𝑅𝑒𝜃 ........................................................................................................................................ 45
Tabela 18 – Sensibilidade dos resultados à variação dos parâmetros de turbulência ................................................ 50
Tabela 19 - Comparação da variação do comprimento (L) do domínio computacional com a simulação inicial ........ 50
Tabela 20 - Comparação da variação da altura (H) do domínio computacional com a simulação inicial .................... 51
Tabela 21 - Comparação da variação da largura (W) do domínio computacional com a simulação inicial ................. 51
Tabela 22 - Comparação das tipologias de malhas ...................................................................................................... 51
Tabela 23 - Parâmetros de definição da camada de prismas ...................................................................................... 54
Tabela 24 - Parâmetros para a resolução das equações (26) a (30) ............................................................................ 57
Tabela 25 - Características das regiões de refinamento da superfície livre ................................................................ 57
Tabela 26 - Dimensões do domínio computacional ..................................................................................................... 58
Tabela 27 - Condições definitas para ativação do VOF Phase Replacement ............................................................... 60

xi
Tabela 28 - Propriedades da onda plana (VOF Waves) ................................................................................................ 60
Tabela 29 - Condições de fronteira definidas para a resolução do problema com superfície livre ............................. 61
Tabela 30 - Condições de iniciais definidas para a resolução do problema com superfície livre ................................ 61
Tabela 31 - Resultados das forças e momentos de interesse calculados, por componente da embarcação .............. 62
Tabela 32 - Comparação das componentes de pressão e viscosa das forças e momentos de interesse .................... 62
Tabela 33 - Comparação dos resultados obtidos com a simulação com e sem superfície livre .................................. 66
Tabela 34 - Comparação dos resultados obtidos nos casos com e sem superfície livre (CSL e SSL, respetivamente),
detalhados por componente........................................................................................................................................ 67
Tabela 35 - Comparação da resistência viscosa e de pressão no casco para os casos com e sem superfície livre (CSL e
SSL, respetivamente).................................................................................................................................................... 67
Tabela 36 - Dados das simulações a diferentes números de Froude........................................................................... 69
Tabela 37 - Resultados obtidos para o cálculo a diferentes números de Froude ........................................................ 69
Tabela 38 - Variação do coeficiente de resistência 𝐶𝑋 com a velocidade. A coluna Δ avalia a variação do resultado
com o resultado da velocidade anterior ...................................................................................................................... 70

xii
NOMENCLATURA
Símbolo Unidades Descrição
𝐹𝑟 Número de Froude 𝑈 𝑚/𝑠 Velocidade 𝑔 𝑚/𝑠2 Aceleração da gravidade 𝐿 𝑚 Comprimento ∇ 𝑚3 Volume de deslocamento ou volume submerso
𝜏𝑤 𝑃𝑎 Tensão de corte na parede 𝜈 𝑃𝑎. 𝑠 Viscosidade dinâmica
𝐶𝐹 Coeficiente de resistência de frição 𝜌 𝑘𝑔/𝑚3 Massa específica 𝛿∗ 𝑚 Espessura de deslocamento 𝑈𝑒 𝑚/𝑠 Velocidade escoamento exterior 𝜇 𝑚2/𝑠 Viscosidade cinemática 𝜎 𝑚𝑁/𝑚 Tensão de superfície 𝛼𝑐 𝑟𝑎𝑑 Ângulo de contacto 𝑅𝑒 Número de Reynolds 𝑝 𝑃𝑎 Pressão 𝑊 𝑘𝑔 Peso do corpo em flutuação 𝐼 𝑁 Impulsão
𝐿𝑟𝑒𝑓 𝑚 Comprimento de referência
𝑦+ Distância adimensional à parede 𝑈+ Velocidade adimensional 𝑢𝜏 𝑚/𝑠 Velocidade de corte 𝛼 Fração de volume
𝐶𝐹𝐿𝑢 Número de Courant superior 𝐶𝐹𝐿𝑙 Número de Courant inferior
𝜆 𝑚 Comprimento de onda 𝜉 𝑚 Amplitude 𝑆 𝑚2 Área de seção transversal do volume submerso
𝜉𝑚𝑎𝑥 𝑚 Amplitude da onda do transom 𝐷 𝑚 Deslocamento do volume submerso 𝑐 𝑚/𝑠 Velocidade da onda 𝜔 𝑟𝑎𝑑/𝑠 Velocidade de frequência 𝑘 𝑚−1 Número de onda 𝑃 𝑠 Período de onda ℎ𝑖 𝑚 Comprimento característico de uma malha i 𝐹𝑆 Fator de segurança 𝐶𝑓 Coeficiente de fricção
𝐶𝐷 Coeficiente de resistência 𝐶𝐿 Coeficiente de sustentação 𝛿 𝑚 Espessura da camada limite 𝐼 Intensidade de turbulência 𝛽 Viscosidade turbulenta Δ𝑡 𝑠 Time-step Δ Variação
𝐶𝑋 Coeficiente de força na direção X (resistência) 𝐹𝑋 𝑁 Força na direção X 𝐴 𝑚2 Área de referência

xiii
LISTA DE ACRÓNIMOS
Acrónimo Descrição
ICCCC International C-Class Catamaran Championship
DNS Direct Numerical Simulations
LES Large-Eddy Simulation
RANS Reynolds Average Navier-Stokes
RANSE Reynolds Average Navier-Stokes Equations
VOF Volume of Fluid
HRIC High-Resolution Interface Capturing
DB Daggerboard
RD Rudder
WL Winglets
SL Superfície livre
SSL Sem superfície livre
CSL Com superfície livre

1
1 INTRODUÇÃO
1.1 MOTIVAÇÃO E OBJETIVOS
O presente trabalho tem como objetivo a simulação e análise do comportamento hidrodinâmico de um
catamaran de competição classe C, visando a determinação das forças que atuam na embarcação a diferentes
velocidades, recorrendo à resolução numérica das equações de Navier-Stokes em média temporal de Reynolds.
Um catamaran classe C é uma embarcação à vela de dois cascos composta por uma vela rígida (wingsail) e
por um leme direcional (rudder) e um patilhão (daggerboard) em cada um dos cascos. Uma das características
principais deste tipo de embarcações é a capacidade de produzir sustentação suficiente para se elevar da superfície
da água, aumentando significativamente a sua eficiência através da redução da resistência e consequente aumento
de velocidade
O catamaran em estudo foi projetado e construído pela Optimal Structural Solutions em 2013 para
participar na International C-Class Catamaran Championship (ICCCC) no Reino Unido pela Team Cascais. Esta é uma
competição internacional inovadora de regulamento aberto onde as equipas são incentivadas a desenvolver as
próprias embarcações para a competição.
O projeto de desenhar e construir um catamaran foi pioneiro na área náutica para a Optimal Structural
Solutions. Atualmente, a equipa ambiciona desenvolver um segundo protótipo baseado na experiência adquirida,
pelo que se torna imperativo estudar o desempenho hidrodinâmico da embarcação, nomeadamente o momento em
que o catamaran se eleva acima da superfície da água. O presente trabalho surge para apoiar a equipa neste estudo
e suportar futuras decisões de projeto.
Em primeira análise, o momento de elevação do catamaran poderá ser condicionado por três principais
motivos:
1. A força propulsora da vela do catamaran não é suficiente para atingir a velocidade de take-off;
2. A força de resistência do catamaran é demasiado elevada não permitindo atingir a velocidade de
take-off do catamaran;
3. A força de sustentação do daggerboard não é suficiente para vencer o peso da embarcação à
velocidade de take-off do catamaran;
O presente trabalho pretende analisar dois últimos motivos descritos através da determinação da evolução
da força de resistência e de sustentação com a velocidade do catamaran.
2
1.2 ENQUADRAMENTO
O presente capítulo tem como objetivo a revisão dos principais temas e conceitos associados a este trabalho.
Inicialmente, será feita uma breve introdução à navegação à vela e às principais força e momentos associados. Em
segundo lugar será apresentado o conceito de catamaran classe C, regulamento associado e características
principais. Posteriormente será exposta uma discussão sobre diferentes tipos de embarcações de um ponto de vista
hidrodinâmico. Por último, a revisão da resistência hidrodinâmica, genericamente dividida em resistência viscosa e
de resistência de onda.
1.2.1 Navegar à vela
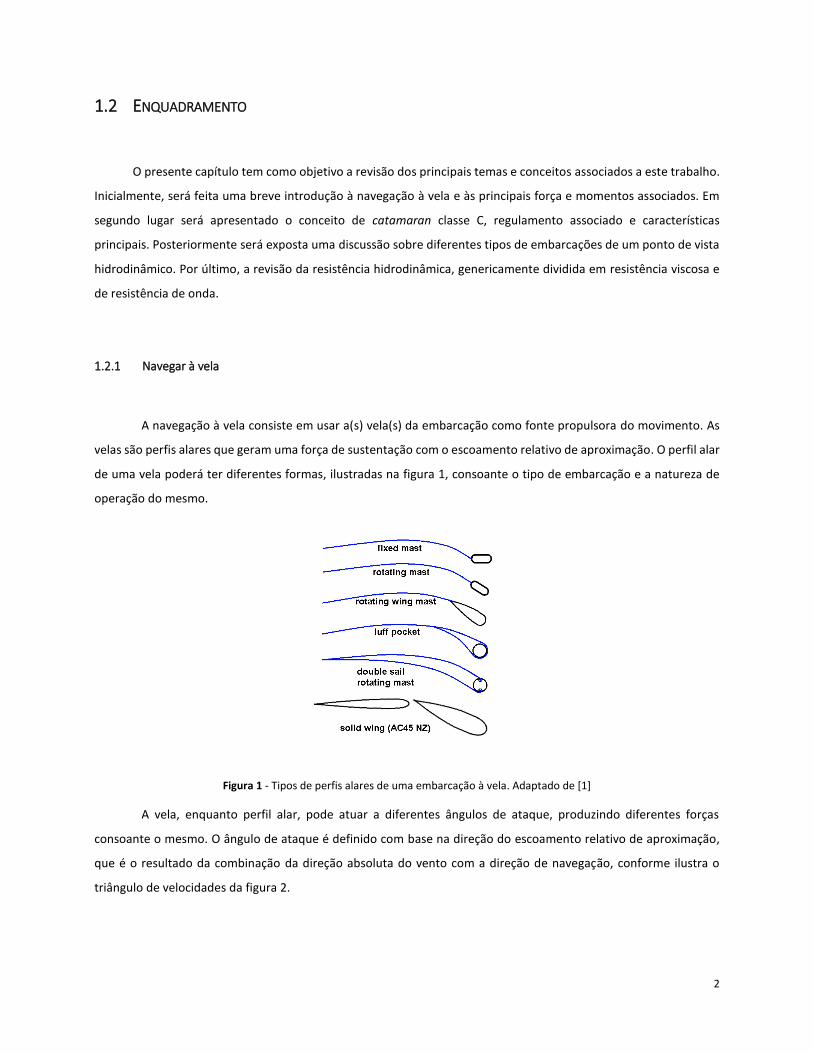
A navegação à vela consiste em usar a(s) vela(s) da embarcação como fonte propulsora do movimento. As
velas são perfis alares que geram uma força de sustentação com o escoamento relativo de aproximação. O perfil alar
de uma vela poderá ter diferentes formas, ilustradas na figura 1, consoante o tipo de embarcação e a natureza de
operação do mesmo.
Figura 1 - Tipos de perfis alares de uma embarcação à vela. Adaptado de [1]
A vela, enquanto perfil alar, pode atuar a diferentes ângulos de ataque, produzindo diferentes forças
consoante o mesmo. O ângulo de ataque é definido com base na direção do escoamento relativo de aproximação,
que é o resultado da combinação da direção absoluta do vento com a direção de navegação, conforme ilustra o
triângulo de velocidades da figura 2.
3
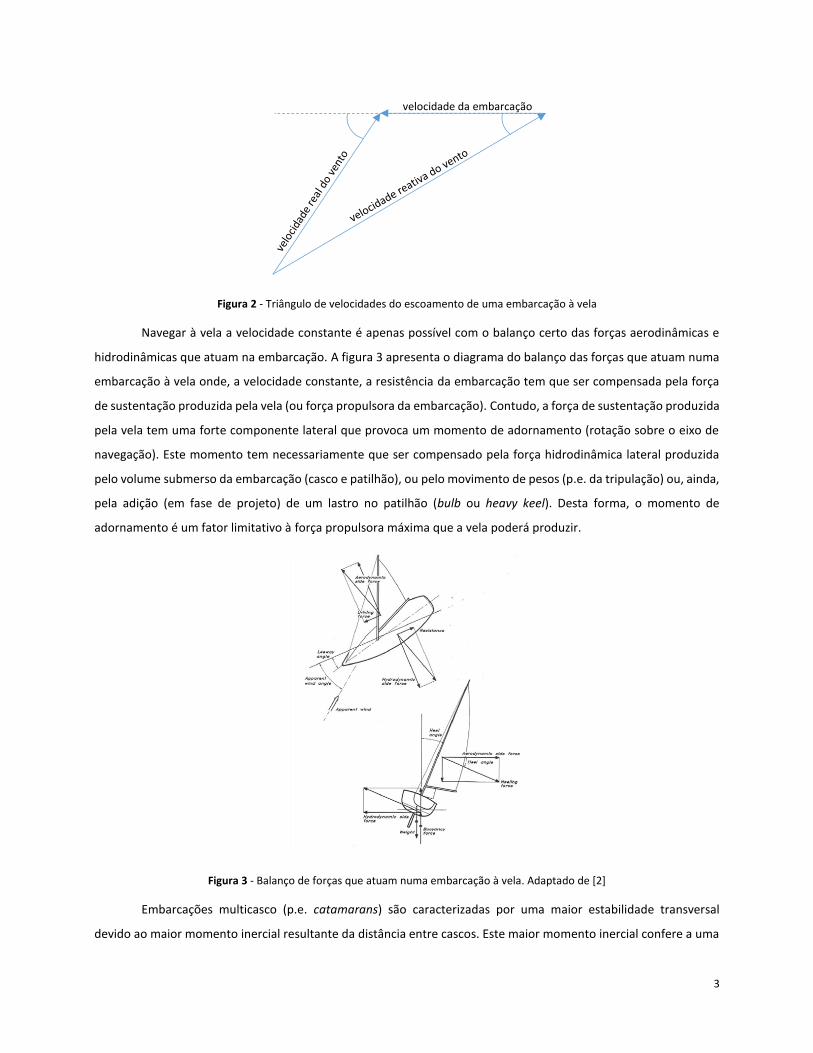
Figura 2 - Triângulo de velocidades do escoamento de uma embarcação à vela
Navegar à vela a velocidade constante é apenas possível com o balanço certo das forças aerodinâmicas e
hidrodinâmicas que atuam na embarcação. A figura 3 apresenta o diagrama do balanço das forças que atuam numa
embarcação à vela onde, a velocidade constante, a resistência da embarcação tem que ser compensada pela força
de sustentação produzida pela vela (ou força propulsora da embarcação). Contudo, a força de sustentação produzida
pela vela tem uma forte componente lateral que provoca um momento de adornamento (rotação sobre o eixo de
navegação). Este momento tem necessariamente que ser compensado pela força hidrodinâmica lateral produzida
pelo volume submerso da embarcação (casco e patilhão), ou pelo movimento de pesos (p.e. da tripulação) ou, ainda,
pela adição (em fase de projeto) de um lastro no patilhão (bulb ou heavy keel). Desta forma, o momento de
adornamento é um fator limitativo à força propulsora máxima que a vela poderá produzir.
Figura 3 - Balanço de forças que atuam numa embarcação à vela. Adaptado de [2]
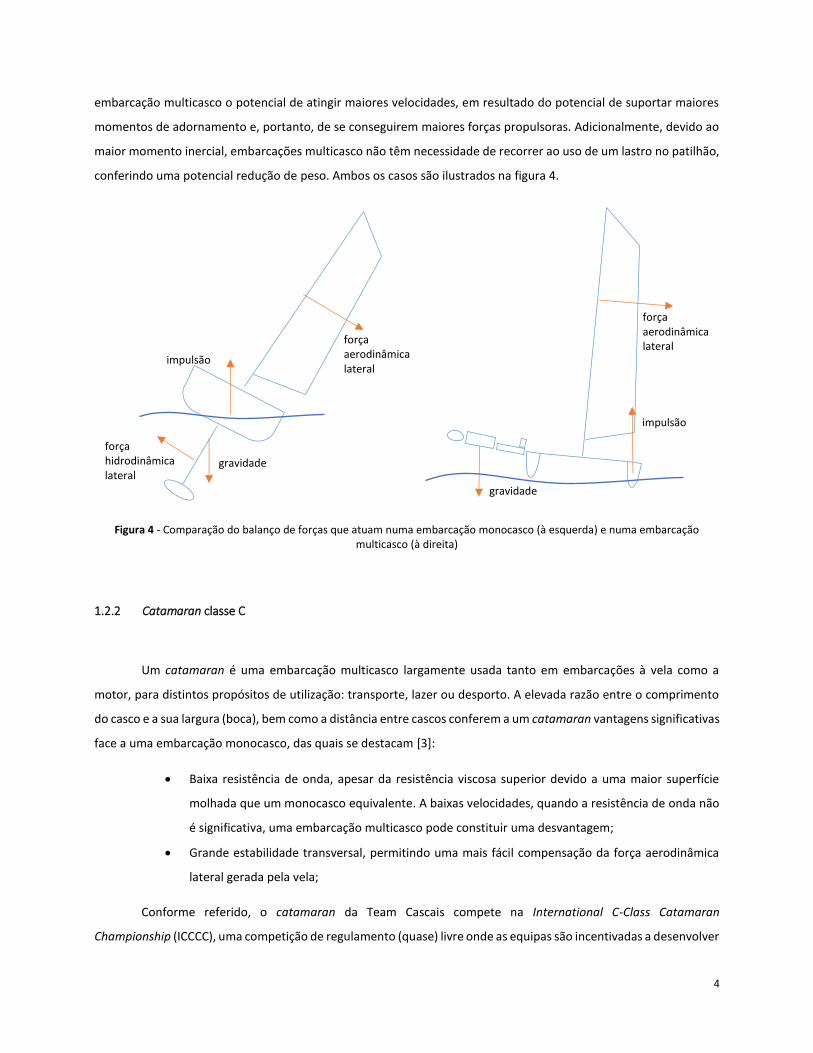
Embarcações multicasco (p.e. catamarans) são caracterizadas por uma maior estabilidade transversal
devido ao maior momento inercial resultante da distância entre cascos. Este maior momento inercial confere a uma
velocidade da embarcação
4
embarcação multicasco o potencial de atingir maiores velocidades, em resultado do potencial de suportar maiores
momentos de adornamento e, portanto, de se conseguirem maiores forças propulsoras. Adicionalmente, devido ao
maior momento inercial, embarcações multicasco não têm necessidade de recorrer ao uso de um lastro no patilhão,
conferindo uma potencial redução de peso. Ambos os casos são ilustrados na figura 4.
Figura 4 - Comparação do balanço de forças que atuam numa embarcação monocasco (à esquerda) e numa embarcação multicasco (à direita)
1.2.2 Catamaran classe C
Um catamaran é uma embarcação multicasco largamente usada tanto em embarcações à vela como a
motor, para distintos propósitos de utilização: transporte, lazer ou desporto. A elevada razão entre o comprimento
do casco e a sua largura (boca), bem como a distância entre cascos conferem a um catamaran vantagens significativas
face a uma embarcação monocasco, das quais se destacam [3]:
Baixa resistência de onda, apesar da resistência viscosa superior devido a uma maior superfície
molhada que um monocasco equivalente. A baixas velocidades, quando a resistência de onda não
é significativa, uma embarcação multicasco pode constituir uma desvantagem;
Grande estabilidade transversal, permitindo uma mais fácil compensação da força aerodinâmica
lateral gerada pela vela;
Conforme referido, o catamaran da Team Cascais compete na International C-Class Catamaran
Championship (ICCCC), uma competição de regulamento (quase) livre onde as equipas são incentivadas a desenvolver
força aerodinâmica lateral
impulsão
gravidade
força hidrodinâmica lateral
gravidade
impulsão
força aerodinâmica lateral

5
as suas próprias embarcações. Para as equipas, é um desafio estimulante uma vez que conseguem aplicar toda a sua
criatividade através de soluções de engenharia inovadoras. O regulamento da ICCC apenas define regras para as
dimensões máximas do catamaran e para o número de tripulantes, deixando livres quaisquer outras opções de
projeto para os engenheiros. Sumariamente, o regulamento da ICCCC define que (adaptado de [4]):
1. Um catamaran classe C é uma embarcação à vela de dois cascos iguais paralelos com posições fixas;
2. A área da vela não pode ser superior a 27,868 𝑚2 (300 𝑓𝑡2);
3. O comprimento máximo não pode ser superior a 7,62 𝑚 (25 𝑓𝑡);
4. A viga mestra não pode ser maior que 4,267 𝑚 (14 𝑓𝑡);
5. A tripulação deverá ser composta por dois elementos;
A figura 5 apresenta a versão de projeto do catamaran da Team Cascais, indicando o nome dos principais
componentes de um catamaran.
Figura 5 - Catamaran C-Class da Team Cascais e os seus principais componentes
Os cascos são a estrutura base e de flutuação da embarcação. Estão unidos por duas vigas transversais e
têm capacidade de individualmente suportar todo o peso da embarcação, i.e., permitem a navegação apoiada num
só casco.
Os lemes (rudders), localizados a ré, têm o objetivo de direcionar a trajetória durante a navegação. Os
winglets, omissos na figura, são pequenas asas fixas ao leme cujo objetivo é conferir estabilidade dinâmica.
Os patilhões (daggerboards) têm como objetivo produzir força lateral que equilibre o momento de
adornamento produzido pela vela e, ainda, o objetivo de produzir a força de sustentação necessária para elevar toda
a embarcação acima da superfície da água. Os daggerboards têm uma posição recolhida (fora de água) e uma posição
Casco (hull)
Patilhão (daggerboard)
Leme (rudder)
Asa (wing)
Viga (beam)

6
estendida (dentro de água). Os daggerboards têm a capacidade de individualmente produzir sustentação suficiente
para suportar toda a embarcação, i.e., navegar com apenas um daggerboard submerso.
A vela rígida, tipicamente de dois elementos, é o elemento que produz a força de propulsão (ou sustentação
do referencial da vela) necessária para a navegação, tendo liberdade de rotação sob um eixo vertical.
A produção de sustentação pelo(s) daggerboard(s) só é possível uma vez atingida a velocidade de take-off
(variável de projeto), exigindo o balanço certo entre a força de resistência e a força de propulsão da asa. Uma vez
atingido a velocidade de take-off, o catamaran eleva-se da superfície da água, a força de resistência diminui
drasticamente relativamente à posição na água, permitindo atingir velocidades muito superiores.
1.2.3 Tipos de embarcações
Existem hoje inúmeros tipos diferentes de embarcações que servem propósitos distintos, cujos os respetivos
desenhos são projetados à medida das exigências de operação. O casco de uma embarcação surge como um
componente de destaque ao nível de projeto por ser o elemento principal da flutuação da embarcação e por ser o
componente responsável pela maior contribuição para a força de resistência total, pelo que é recorrentemente o
foco principal de trabalhos relativos a embarcações.
O número de Froude é um parâmetro adimensional de referência no estudo hidrodinâmico de embarcações,
que visa caracterizar a mesma em termos da relação entre a força hidrodinâmica (i.e., do movimento) e a força
hidrostática (i.e., da impulsão) que atuam na embarcação, equação (1). Através do número de Froude é então
possível estabelecer um conjunto de características e propriedades da embarcação, sendo, portanto, um número
adimensional muito usado em aplicações marítimas.
𝐹𝑟 =𝑈
√𝑔𝐿 (1)
Na equação (1), 𝑈 representa a velocidade da embarcação, 𝑔 a força da gravidade (ao longo do texto
assume-se 𝑔 = 9,81 𝑚/𝑠) e 𝐿 o comprimento da linha de água embarcação (é igualmente comum usar-se ∇1 3⁄ como
o volume submerso da embarcação em alternativa ao comprimento da linha de água).
Desta forma, um número de Froude baixo (𝐹𝑟 < 0,4) caracteriza uma embarcação de baixa velocidade em
que a pressão hidrostática é dominante. Para números de Froude superiores, a velocidade da embarcação começa a
ser significativa e a pressão hidrodinâmica tende a aumentar a sua importância face à pressão hidrostática. Quando
𝐹𝑟 > 1, pressão hidrodinâmica torna-se dominante relativamente à pressão hidrostática. Recorde-se que da pressão
hidrostática se obtém a força de impulsão, igual ao peso do fluido deslocado pelo volume submerso, e que a pressão
7
hidrodinâmica (ou pressão dinâmica) está relacionada com o movimento da embarcação e é proporcional ao
quadrado da velocidade do escoamento.
Considerando a relação definida pelo número de Froude, distinguem-se três tipos de embarcações
consoante a natureza do campo de pressão dominante [3]:
Embarcação de deslocamento (𝐹𝑟 < 0,4), onde a pressão hidrostática é dominante;
Embarcação de semideslocamento (0,4 < 𝐹𝑟 < 1), onde as pressões hidrostáticas e
hidrodinâmicas têm a mesma ordem de grandeza;
Embarcação planante (𝐹𝑟 > 1), onde a pressão hidrodinâmica é dominante;
Complementarmente, é comum distinguir-se embarcações quanto à sua velocidade, designando por
embarcação de alta velocidade (high speed vessel) quando 𝐹𝑟 ≥ 0,5 [5].
Os diferentes tipos de embarcações acima descritos denotam regimes de operação distintos e, por
conseguinte, exigência/requisitos de projeto diferentes. Ao aumento do número de Froude está associado um
aumento da resistência da embarcação devido às maiores forças hidrodinâmicas. É, portanto, comum verificarem-se
geometrias características de cascos e embarcações para as diferentes gamas de número de Froude, tais como, spray
rails, transom sterns, stepped hull, etc. Adicionalmente, para embarcações com 𝐹𝑟 > 0,4 é comum a adição de
apêndices hidrodinâmicos (hydrofoils) com o objetivo de desenvolver a sustentação necessária para elevar a
embarcação da superfície da água, reduzindo drasticamente a resistência hidrodinâmica e aumentando
consequentemente a velocidade.
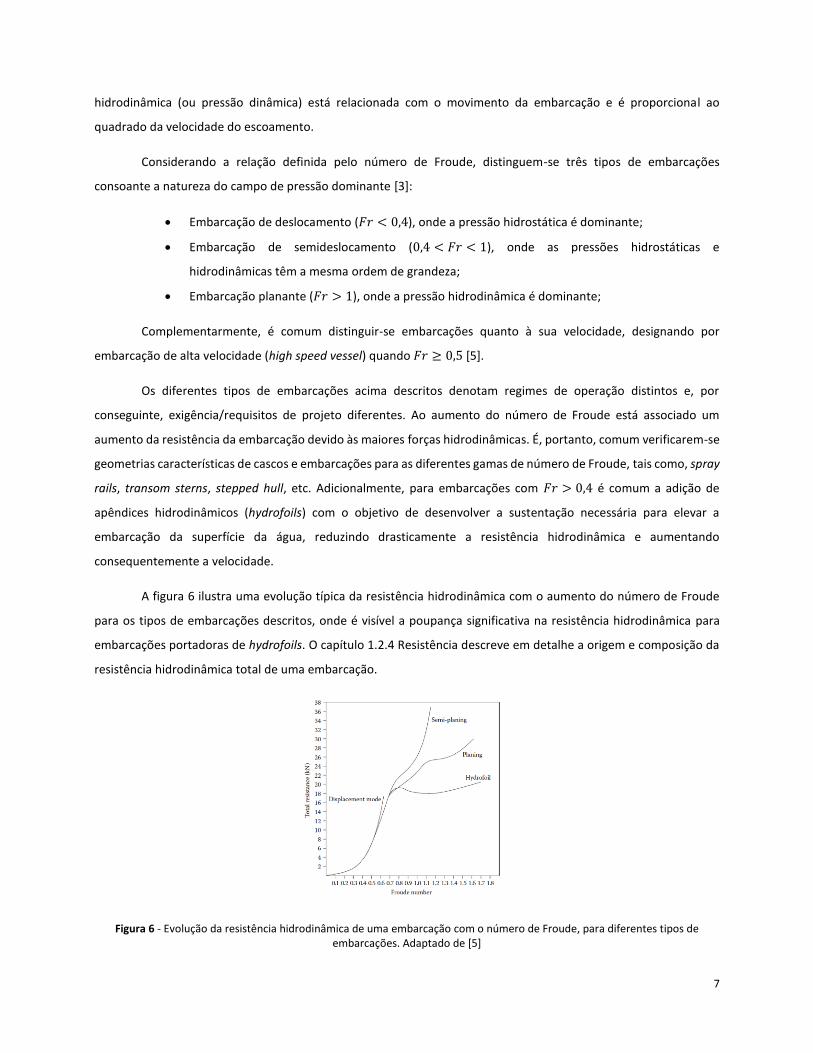
A figura 6 ilustra uma evolução típica da resistência hidrodinâmica com o aumento do número de Froude
para os tipos de embarcações descritos, onde é visível a poupança significativa na resistência hidrodinâmica para
embarcações portadoras de hydrofoils. O capítulo 1.2.4 Resistência descreve em detalhe a origem e composição da
resistência hidrodinâmica total de uma embarcação.
Figura 6 - Evolução da resistência hidrodinâmica de uma embarcação com o número de Froude, para diferentes tipos de embarcações. Adaptado de [5]
8
A evolução da resistência total apresentada na figura acima é apenas representativa e está totalmente
dependente dos detalhes da forma de cada casco. Em fase inicial do projeto de cascos é necessário perceber que
tipo de coeficientes de forma (coeficientes adimensionais que caracterizam os comprimentos, áreas e volumes da
embarcação) serão ideais para a operação eficiente da embarcação. Para tal, estão disponíveis na literatura
diferentes estudos que visam a estimativa da resistência de cascos ou a otimização da forma do casco para a
resistência mínima tendo como base os referidos coeficientes de forma. Destes estudos, destacam-se os ensaios
experimentais com embarcações de alta velocidade para diferentes geometrias [6] ou o macro projeto hidrodinâmico
de catamarans de resistência mínima [7].
1.2.4 Resistência
Um dos principais temas associados ao projeto de embarcação à vela é a resistência hidrodinâmica do
volume submerso (sem desprezar a resistência aerodinâmica, de menor intensidade, mas fora do âmbito do presente
trabalho). O presente capítulo tem foco particular na resistência hidrodinâmica de cascos uma vez que representam,
tipicamente, a maior contribuição para a resistência hidrodinâmica total de uma embarcação.
De um modo geral distinguem-se duas grandes contribuições para a resistência total de uma embarcação
[3]: a resistência viscosa e a resistência de onda. A baixas velocidades, a resistência viscosa é dominante, uma vez
que a produção de ondas pelo casco não é significativa. Por outro lado, a importância relativa da resistência de onda
começa a aumentar drasticamente com o aumento de velocidade (𝐹𝑟 > 0,4 − 0,5), apesar do aumento da
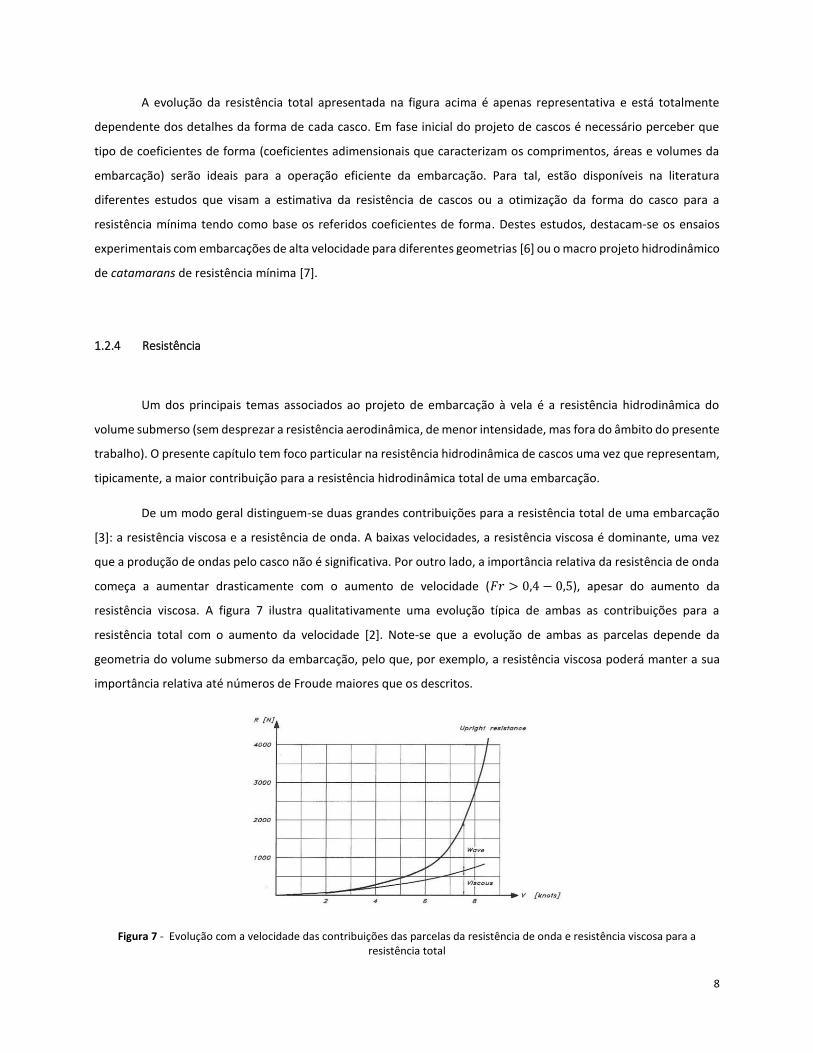
resistência viscosa. A figura 7 ilustra qualitativamente uma evolução típica de ambas as contribuições para a
resistência total com o aumento da velocidade [2]. Note-se que a evolução de ambas as parcelas depende da
geometria do volume submerso da embarcação, pelo que, por exemplo, a resistência viscosa poderá manter a sua
importância relativa até números de Froude maiores que os descritos.
Figura 7 - Evolução com a velocidade das contribuições das parcelas da resistência de onda e resistência viscosa para a resistência total

9
Complementarmente, existem outros fatores que contribuem para a resistência total de uma embarcação,
mas que, por simplicidade do texto, são consideradas como sendo de natureza da resistência viscosa ou da resistência
de onda. Destacam-se:
Resistência induzida criada pelos elementos sustentadores da embarcação
Resistência do spray gerado na proa do casco
1.2.4.1 Resistência viscosa
A verificação de uma condição de não-escorregamento do escoamento na parede, implica a existência de
um gradiente de velocidade desde o escoamento exterior (𝑈𝑒) até à parede, em que 𝑈𝑦=0 = 0 𝑚/𝑠. A intensidade
deste gradiente aumenta significativamente com a transição do escoamento de regime laminar para turbulento,
figura 8.
Figura 8 – Evolução dos gradientes de velocidades e da camada limite de um escoamento ao longo de uma superfície
Este gradiente de velocidade traduz-se na existência de uma tensão de corte proporcional ao gradiente e à
viscosidade do escoamento exterior, equação (2). Integrando as tensões de corte locais ao longo da superfície,
equação (3), obtém-se a componente de fricção da resistência viscosa, que será tanto maior quanto a extensão da
superfície ou os gradientes de velocidade verificados.
𝜏𝑤 = 𝜇𝜕𝑈
𝜕𝑦 (2)
𝐶𝐹 =∫ 𝜏𝑤 𝑑𝑥
12
𝜌𝐿𝑈2 (3)
Adicionalmente, os gradientes de velocidade do fluido junto à parede de um corpo conduzem a um deficit
de caudal de fluido quantificado pela quantidade espessura de deslocamento 𝛿∗, equação (4) onde 𝑈/𝑈𝑒 representa
a razão entre a velocidade local e a velocidade do escoamento exterior. A espessura de deslocamento traduz,
laminar turbulento
𝛿
10
portanto, o desvio das linhas de corrente do escoamento devido ao menor caudal verificado na camada limite,
relativamente à situação de fluido perfeito.
𝛿∗ = ∫ (1 −𝑈
𝑈𝑒
)𝛿
0
𝑑𝑦 (4)
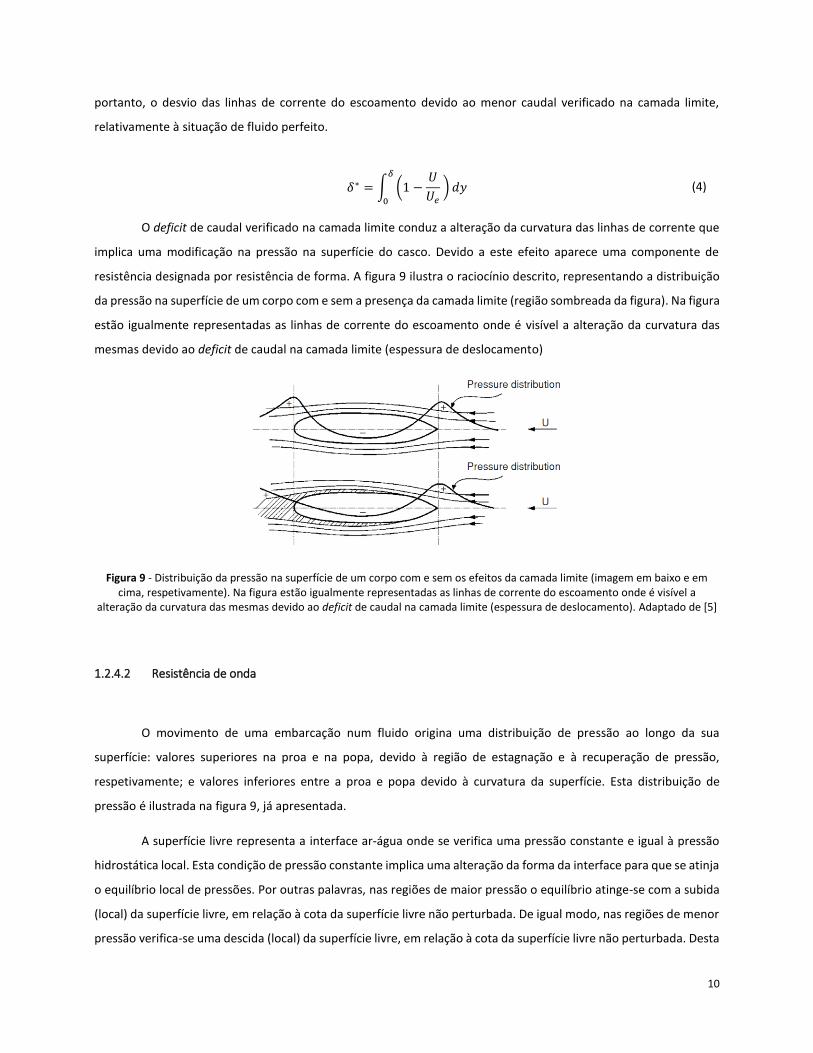
O deficit de caudal verificado na camada limite conduz a alteração da curvatura das linhas de corrente que
implica uma modificação na pressão na superfície do casco. Devido a este efeito aparece uma componente de
resistência designada por resistência de forma. A figura 9 ilustra o raciocínio descrito, representando a distribuição
da pressão na superfície de um corpo com e sem a presença da camada limite (região sombreada da figura). Na figura
estão igualmente representadas as linhas de corrente do escoamento onde é visível a alteração da curvatura das
mesmas devido ao deficit de caudal na camada limite (espessura de deslocamento)
Figura 9 - Distribuição da pressão na superfície de um corpo com e sem os efeitos da camada limite (imagem em baixo e em cima, respetivamente). Na figura estão igualmente representadas as linhas de corrente do escoamento onde é visível a
alteração da curvatura das mesmas devido ao deficit de caudal na camada limite (espessura de deslocamento). Adaptado de [5]
1.2.4.2 Resistência de onda
O movimento de uma embarcação num fluido origina uma distribuição de pressão ao longo da sua
superfície: valores superiores na proa e na popa, devido à região de estagnação e à recuperação de pressão,
respetivamente; e valores inferiores entre a proa e popa devido à curvatura da superfície. Esta distribuição de
pressão é ilustrada na figura 9, já apresentada.
A superfície livre representa a interface ar-água onde se verifica uma pressão constante e igual à pressão
hidrostática local. Esta condição de pressão constante implica uma alteração da forma da interface para que se atinja
o equilíbrio local de pressões. Por outras palavras, nas regiões de maior pressão o equilíbrio atinge-se com a subida
(local) da superfície livre, em relação à cota da superfície livre não perturbada. De igual modo, nas regiões de menor
pressão verifica-se uma descida (local) da superfície livre, em relação à cota da superfície livre não perturbada. Desta

11
forma, as variações de pressão verificadas na superfície do casco provocam alterações à forma superfície livre que,
com o movimento da embarcação, origina a criação de múltiplos sistemas de ondas que se propagam ao longo da
superfície livre. Apesar de teoricamente serem criados inúmeros sistemas de ondas com características diferentes,
ao nível conceptual é comum assumirem-se apenas os sistemas de ondas criados na proa e na popa do casco, como
os sistemas de ondas mais dominantes que, uma vez sobrepostos, originarão o sistema total de ondas.
A resistência dos vários sistemas de ondas é, genericamente, tanto maior quanto maior a velocidade da
embarcação. Contudo, a resistência é avaliada pelo sistema total de ondas que poderá ter características diferentes
dos sistemas individuais em resultado da sobreposição dos mesmos. Nesse sentido, a resistência de onda total
poderá ser inferior à resistência de cada sistema isolado, devido a efeitos de cancelamento dos sistemas. Pelo
contrário, os sistemas poderão amplificar-se, provocando uma resistência de onda total superior à resistência
individual dos mesmos. Em suma, a evolução da curva da resistência de onda é função do número de Froude e tem
máximos e mínimos locais (cuja proeminência das concavidades depende da geometria do casco) devido aos efeitos
de sobreposição. A figura 10 ilustra a evolução típica da resistência de onda descrita, onde a forma da curva é
dependente da geometria do casco.
Figura 10 - Evolução da resistência de onda com o número de Froude. Adaptado de [2]
Apesar da predominância do casco na contribuição para a resistência de onda, os apêndices hidrodinâmicos
da embarcação, por exemplo o daggerboard e o leme, sofrem também uma variação de pressão na sua superfície
que poderá provocar alterações ao sistema total de ondas. Estas alterações serão tão menos intensas quanto maior
for a imersão do componente em questão.
1.3 METODOLOGIA
O presente trabalho tem como objetivo a análise do escoamento em torno do catamaran a uma velocidade
de referência de 10 nós (5,144 m/s) e a determinação das forças que atuam na embarcação a diferentes velocidades.
O problema será abordado em duas fases complementares.

12
Numa primeira fase será analisado em regime estacionário o escoamento em torno do volume submerso da
embarcação, desprezando os efeitos da superfície livre (simulando-a como um plano de simetria) com o objetivo de
conhecer o caso em estudo e de forma a suportar as opções numéricas para a segunda fase. Nesta fase, será feita a
verificação dos resultados obtidos e estimada a incerteza numérica associada à discretização espacial do problema
em estudo.
Na segunda fase será efetuado o cálculo do escoamento em torno do catamaran considerando os efeitos da
superfície livre. Devido às ondas, este cálculo é necessariamente não estacionário, ainda que a avaliação dos
resultados será apenas feita já na região estabilizada da evolução transiente. Nesta fase será ainda repetido o mesmo
cálculo para vários números de Froude, obtendo a curva de resistência hidrodinâmica com o número de Froude.
1.4 HIPÓTESES E LIMITAÇÕES
O presente capítulo identifica as principais hipóteses e limitações ao trabalho desenvolvido.
Mediante a velocidade e direção da navegação, o equilíbrio de forças e momentos conduz a várias posições
de navegação da embarcação. Assume-se que a velocidade e direção de navegação são tais que permitam que o
catamaran navegue suportado por apenas um dos cascos. Nesta posição, nenhum dos apêndices do casco elevado
está submerso. Nesse sentido, apenas será analisado metade da embarcação, ou seja, um casco, um daggerboard,
um rudder e um par de winglets, conforme apresentado da figura 11.
Figura 11 - Geometria em estudo no presente trabalho
Assume-se que o catamaran navega em mar (i.e., água salgada) sem ondulações na superfície livre. Esta
hipótese é uma prática comum e permite a abordagem ao problema com uma formulação consistente e problemas
estatisticamente estacionários. A contabilização de perturbações externas, tais como ondulação irregular, poderá ser
feita recorrendo às recorreções sugeridas pela ITTC em [8].
Casco (hull)
Daggerboard
Rudder
Winglets
13
Assume-se que existe um equilíbrio de momentos em todas as direções. A simulação da embarcação com
graus de liberdade está fora do âmbito do trabalho, não sendo necessária uma análise aos momentos que atuam na
embarcação. Nesse sentido, apenas serão estudadas as forças que atuam na embarcação.
Assume-se que as paredes do catamaran são hidrodinamicamente lisas, ou seja, a rugosidade da
embarcação não foi considerada. É uma hipótese válida reconhecendo que a embarcação é construída em materiais
compósitos tipicamente caracterizados por excelentes acabamentos superficiais.
Assume-se que os fluidos têm massas específicas constantes em todo o domínio.
O poder computacional disponível é limitado, em particular ao nível de hardware para a resolução de
cálculos com superfície livre. Esta limitação exige modelos computacionais mais económicos, tendo presente o
incremento da incerteza dos resultados com esta decisão. Os cálculos foram realizados numa estação de trabalho
com as seguintes características: Intel Xeon CPU E5-2650 v2 @ 2,60GHz (16 cores), com 132 Gb de RAM e 1 Tb de
HDD, através da plataforma Ubuntu 12.04 LTS x64.
Não existem disponíveis quaisquer dados reais, experimentais ou numéricos relativos à hidrodinâmica da
embarcação, não permitindo o exercício de validação dos resultados.
As geometrias em análise foram fornecidas pela Optimal Structural Solutions em formato “.igs” (superfície),
preparadas em Solidworks para a resolução do problema em causa e importadas para o STAR-CCM+ v11.04.010,
onde foram geradas as malhas e efetuadas as simulações numéricas.
1.5 PROPRIEDADES DE REFERÊNCIA
1.5.1 Propriedades termofísicas
Os escoamentos a resolver são ar e água do mar (seawater). A tabela 1 apresenta as propriedades dos dois
fluidos usadas para a resolução do problema, bem como as condições de referência a que essas propriedades foram
avaliadas:

14
Condições de referência:
Salinidade água do mar absoluta 35,16504 ± 0,007 𝑔/𝑘𝑔
Pressão de referência 101325 𝑃𝑎
Temperatura 15℃
Propriedades água do mar:
Massa específica 𝜌 1026,02 𝑘𝑔/𝑚3
Viscosidade dinâmica 𝜇 0,00122 𝑃𝑎. 𝑠
Viscosidade cinemática 𝜈 1,1892 × 10−6 𝑚2/𝑠
Propriedades ar:
Massa específica 𝜌 1,1842 𝑘𝑔/𝑚^3
Viscosidade dinâmica 𝜇 1,8551 × 10−5 𝑃𝑎. 𝑠
Viscosidade cinemática 𝜈 1,5666 × 10−5 𝑚2/𝑠
Tensão de superfície 𝝈 0,074545 𝑚𝑁/𝑚
Ângulo de contacto 𝜶𝒄 90° = 1,57 𝑟𝑎𝑑 Tabela 1 - Propriedades do ar e da água do mar (seawater) e condições de referência em que as propriedades foram avaliadas
Considerando as propriedades do ar e da água acima descritas e um comprimento de referência 𝐿𝑟𝑒𝑓 = 7𝑚,
correspondente ao comprimento da linha de água (a calcular no capítulo 3.2.1 Determinação da linha de água, é
possível calcular o número de Reynolds do ar e da água e o número de Froude que caracterizam o problema
𝑅𝑒á𝑔𝑢𝑎 =𝜌𝐿𝑟𝑒𝑓𝑈∞
𝜇= 3,03 × 107 (5)
𝑅𝑒𝑎𝑟 =𝜌𝐿𝑟𝑒𝑓𝑈∞
𝜇= 2,3 × 106 (6)
𝐹𝑟 =𝑈∞
√𝑔𝐿𝑟𝑒𝑓
= 0,62 (7)
Estes resultados traduzem um regime do escoamento água dominantemente turbulento (transição ocorre
a ~1,6% do comprimento de referência, admitindo 𝑅𝑒𝑡𝑟 = 5 × 105). O número de Reynolds do ar é uma ordem de
grandeza inferior ao número de Reynolds da água. A embarcação é encarada, em termos hidrodinâmicos, como um
navio a alta velocidade (𝐹𝑟 ≥ 0,5) e de semi deslocamento (0,4 < 𝐹𝑟 < 1 − 1,2).
1.5.2 Referencial
A origem do referencial está definida no ponto mais baixo do plano da popa (transom), orientando 𝑋 a vante
(no sentido do deslocamento da embarcação paralelo à linha de água), 𝑌 para bombordo (interior do catamaran) e
𝑍 na direção vertical (normal à superfície livre). Este referencial será usado ao longo de todo o presente texto.

15
Figura 12 - Localização da origem do referencial
1.6 ESTRUTURA DA DISSERTAÇÃO
O presente texto está estruturado em cinco capítulos principais:
No capítulo 2 Fundamentos teóricos será feita uma breve revisão teórica às equações da dinâmica
do fluido, à formulação e modelação numérica da turbulência e ao modelo de previsão da transição
laminar-turbulento 𝛾 − 𝑅𝑒𝜃, ao conceito de superfície livre e a respetiva modelação numérica, aos
conceitos associados ao sistema de ondas e, por último, ao exercício de verificação da solução.
No capítulo 3 Estudo sem superfície livre, capítulo dedicado à primeira fase apresentada em 1.3
Metodologia, será descrita a parametrização do modelo computacional para o estudo sem
superfície livre (detalhando a determinação da linha de água, a geometria em estudo, a
discretização espacial e os modelos físicos selecionados), será realizado o exercício de verificação
da solução e será feita a análise aos resultados de referência (desde os resultados iniciais, ao estudo
de adequabilidade dos vários modelos usados e à tipologia da malha definida).
No capítulo 4 Estudo com superfície livre, capítulo dedicado à segunda fase apresentada em 1.3
Metodologia, será descrita a parametrização do modelo computacional para o estudo
considerando os efeitos da superfície livre (detalhando a geometria em estudo, a discretização
espacial e os modelos físicos selecionados) e será feita uma análise aos resultados obtidos,
incluindo a comparação com os resultados do capítulo 3 Estudo sem superfície livre e, ainda, a
análise do escoamento a diferentes números de Froude.
No capítulo 5 Conclusões serão discutidas as principais conclusões ao trabalho realizado
No capítulo 6 Sugestões de trabalhos futuros serão apresentadas sugestões para trabalhos futuros no âmbito do estudo e projeto do catamaran.
𝑋
𝑍
𝑌

16
2 FUNDAMENTOS TEÓRICOS
No presente capítulo será feita uma breve revisão teórica às equações da dinâmica do fluido, à formulação
e modelação numérica da turbulência e ao modelo de previsão da transição laminar-turbulento 𝛾 − 𝑅𝑒𝜃 , ao conceito
de superfície livre e a respetiva modelação numérica, aos conceitos associados ao sistema de ondas e, por último, ao
exercício de verificação da solução.
2.1 EQUAÇÕES DA DINÂMICA DO FLUIDO
O movimento de um fluido newtoniano incompressível deve satisfazer simultaneamente a lei da conservação
da massa, i.e., a quantidade de massa que entra no volume de controlo é igual à quantidade de massa que sai do
mesmo volume, e a segunda lei de Newton, i.e., que a resultante das forças aplicadas ao fluido é igual à variação da
quantidade de movimento do fluido no volume1. Estas leis traduzem-se nas equações de Navier-Stokes: equação da
continuidade (8) e equação de quantidade de movimento (9), apresentadas em notação indicial.
𝜕𝑈𝑖
𝜕𝑥𝑖
= 0 (8)
𝜕𝑈𝑖
𝜕𝑡+ 𝑈𝑗
𝜕𝑈𝑖
𝜕𝑥𝑗
= −1
𝜌
𝜕𝑝
𝜕𝑥𝑖
+ 𝜈𝜕2𝑈𝑖
𝜕𝑥𝑗2 + 𝑓𝑖 (9)
Nas equações acima, 𝑖 representa a direção do referencial onde a equação é avaliada, 𝑗 uma outra direção
do referencial, 𝑈𝑖 a velocidade do escoamento na direção 𝑖, 𝜌 e 𝜈 a densidade e viscosidade cinemática do fluido
(constantes nas condições enunciadas), 𝑝 a pressão e 𝑓𝑖 a aceleração gravítica na direção 𝑖.
A resultante das forças hidrostáticas corresponde a impulsão do volume submerso. Pelo princípio de
Arquimedes, a impulsão 𝐼 de um volume submerso ∇ é igual ao peso do volume de fluido deslocado que deverá
anular o peso W do corpo em flutuação, conforme descreve a equação (10).
𝐼 + P = 𝜌á𝑔𝑢𝑎∇𝑠𝑢𝑏𝑚𝑒𝑟𝑠𝑜 + 𝑊 = 0 (10)
1 No âmbito deste texto omite-se a lei da conservação de energia, uma vez que se assumem fluidos de massa específica constante.

17
Alternativamente, é possível simplificar a equação (9), omitindo 𝑓𝑖 da equação e reconhecendo 𝑝 como a
pressão relativa à hidrostática local. Neste caso, será necessário adicionar a força impulsão ao resultado final do
campo de forças calculado.
O número de Reynolds é um parâmetro adimensional que caracteriza um escoamento com base numa
relação entre as forças de inércia e as forças viscosas, equação (11), onde 𝐿 representa uma dimensão característica
do domínio em análise.
𝑅𝑒 =𝐿 × 𝑈
𝜈 (11)
Um escoamento terá comportamentos diferentes em função do número de Reynolds que o caracterize. De
forma genérica, um escoamento com um 𝑅𝑒 < 106 (no caso de gradiente de pressão nulo em todo o escoamento)
apresenta uma organização em substratos ou lamelas [9], onde as tensões viscosas são suficientemente intensas
para amortecer quaisquer perturbações que o escoamento sofre – escoamento laminar. A números de Reynolds
superiores – escoamento turbulento – verifica-se um comportamento não linear, irregular e aleatório, com
flutuações de velocidade e pressão em relação ao valor médio e com uma grande capacidade de mistura. Este
comportamento irregular e aleatório verifica-se numa grande gama de escalas de tempo e comprimento, conferindo
à turbulência características de um regime de escoamento muito complexo de resolver.
2.2 TURBULÊNCIA
A resolução analítica das equações de Navier-Stokes, equação (9), existe apenas para um número muito
limitado de casos, sendo por isso necessário recorrer a diferentes métodos numéricos para a resolução das equações.
Num escoamento turbulento, a velocidade e pressão variam continuamente e de forma aleatória em diferentes
escalas de tempo e de comprimento. Apesar desta complexidade, é possível resolver as equações de Navier-Stokes
recorrendo a métodos numéricos caso sejam adotadas as discretizações espaciais e temporais apropriadas. Os
métodos de resolução do campo instantâneo da turbulência poderão ser Direct Numerical Simulation (DNS) ou Large
Eddy Simulation (LES), mas são geralmente descartados em aplicações de engenharia devido às exigências
computacionais consequentes das referidas discretizações.
Uma alternativa muito comum, e tipicamente muito mais económica, é recorrer à decomposição de
Reynolds para resolução do campo médio da turbulência – Reynolds Averaged Navier Stokes Equations (RANSE). A
decomposição de Reynolds transforma velocidade instantânea 𝑈 do campo turbulento num campo médio 𝑈 e numa
flutuação 𝑢, equação (12). O mesmo raciocínio pode ser aplicado ao campo de pressões 𝑃, equação (13).

18
𝑈 = 𝑈 + 𝑢 (12)
𝑃 = �̅� + 𝑝 (13)
Através da decomposição de Reynolds e da resolução do campo médio em alternativa ao valor instantâneo,
as RANS apresentam-se como um método atrativo do ponto de vista de aplicações de engenharia. Desta forma,
aplicando a decomposição de Reynolds ao campo de pressões e velocidades e às equações de continuidade (8) e de
quantidade de movimento (9), vem:
𝜕𝑈𝑖
𝜕𝑥𝑖
= 0 (14)
𝜕𝑈𝑖
𝜕𝑡+ 𝑈𝑗
𝜕𝑈𝑖
𝜕𝑥𝑗
= −1
𝜌
𝜕�̅�
𝜕𝑥𝑖
+ 𝜈𝜕2𝑈𝑖
𝜕𝑥𝑗2 +
1
𝜌
𝜕(−𝜌𝑢𝑖𝑢𝑗̅̅ ̅̅ ̅)
𝜕𝑥𝑗
+ 𝑔𝑖 (15)
As equações (14) e (15) são idênticas às anteriores com exceção do termo −𝜌𝑢𝑖𝑢𝑗̅̅ ̅̅ ̅ que representa as tensões
de Reynolds e são incógnitas adicionais a resolver em escoamento turbulento. A tensão de corte total é assim
composta pela soma das tensões de Reynolds (ou tensões turbulentas) com as tensões laminares (uma vez que já se
verificam em escoamento laminar), conforme indica a equação (16).
𝜏 = 𝜏𝑇 = 𝜏𝑙𝑎𝑚 + 𝜏𝑡𝑢𝑟𝑏 = 𝜇𝜕𝑈𝑖
𝜕𝑥𝑗
− 𝜌𝑢𝑖𝑢𝑗̅̅ ̅̅ ̅ (16)
Complementarmente às equações anteriores, é possível estabelecer expressões que caracterizem o
escoamento na camada limite turbulenta em regiões onde se verificam condições de equilíbrio local – camada
interior (em oposição à camada exterior da camada limite). É igualmente possível dividir a camada interior em
camadas mais pequenas mediante a variação do perfil de velocidades e conforme a dominância de cada uma das
parcelas da equação (16). A figura 12 apresenta o perfil de velocidades adimencionalizado nas coordenadas
semilogarítmica da lei da parede (para gradiente de pressão nulo, apesar de outros gradientes afetarem
maioritariamente a camada exterior), onde as variáveis 𝑦+, 𝑈+ e 𝑢𝜏 são definidas pelas equações (17), (18) e (19),
respetivamente.

19
Figura 13 – Perfil de velocidades de uma camada limite turbulenta nas coordenadas semilogarítmica da lei da parede. Adaptado de [9]
𝑦+ =𝑢𝜏𝑦
𝜈 (17)
𝑈+ =𝑈
𝑢𝜏
(18)
𝑢𝜏 = √𝜏𝑤
𝜌 (19)
Para efeitos de cálculos numéricos de escoamentos turbulentos importa destacar as características da
subcamada linear e da camada de parede:
Subcamada linear – válida até 𝑦+ = 5, onde o escoamento é dominado pelas tensões de corte
laminares ( 𝜏𝑇 = 𝜏𝑙𝑎𝑚 = 𝜇𝜕𝑈𝑖
𝜕𝑥𝑗 ) e o perfil de velocidades adimensional é linear: 𝑈+ = 𝑦+ ;
Camada de parede – válida de 𝑦+ = 30 − 50 a 0,15𝛿+, onde o escoamento é dominado pelas
tensões de Reynolds ( 𝜏𝑇 = 𝜏𝑡𝑢𝑟𝑏 = −𝜌𝑢𝑖𝑢𝑗̅̅ ̅̅ ̅ ) e o perfil semilogarítmico segue a equação linear (20),
conhecida por lei da parede
𝑈+ =
1
𝐾ln 𝑦+ + 𝐶
𝐾 = 0,41 e 𝐶 = 5,2
(20)
Os modelos de turbulência RANSE distinguem-se pelo método de resolução das tensões de Reynolds:
modelos de eddy viscosity, que resolvem uma ou duas equações adicionais, e modelos de transporte das tensões de
Reynolds, que resolvem sete equações adicionais (seis para a resolução do tensor de tensões de Reynolds e uma
equação adicional para a determinação da dissipação turbulenta 휀). O modelo mais usado em aplicações de
escoamentos exteriores com regiões de separação (em particular em aplicações navais [10]) é a variante SST do
20
modelo 𝑘 − 𝜔, proposto por Menter [11], que se revela simultaneamente robusto e económico para cálculos de
engenharia. Nesse sentido, o modelo de turbulência SST 𝑘 − 𝜔 será usado no presente trabalho.
2.2.1 Modelo de previsão de transição laminar turbulento 𝛄 − 𝐑𝐞𝛉
A avaliação da localização da transição laminar-turbulento é um ponto importante para a determinação das
forças que atuam num corpo (em particular a força de resistência) devido ao aumento do valor da tensão de corte
com a transição para regime turbulento. Os modelos de turbulência base de duas equações, onde se inclui o modelo
𝑘 − 𝜔 SST, tendem a antecipar o início da transição laminar-turbulento [12] (no caso de uma placa plana, 𝑅𝑒 ≈ 4 ×
104 em alternativa ao valor típico de referência 𝑅𝑒 = 5 × 105) conduzindo a resultados superiores de resistência de
fricção. Contudo, a determinação mais precisa do início da região de transição laminar-turbulento pode ser
conseguida recorrendo ao modelo 𝛾 − 𝑅𝑒𝜃, proposto inicialmente por Menter [13], que é baseado em correlações
e variáveis locais e, por conseguinte, adequado para aplicações de CFD com malhas não estruturadas. O modelo
contrasta com outras técnicas tradicionais de previsão da transição baseadas em métodos integrais (por exemplo,
parâmetros integrais de camada limite) cuja determinação pode ser muito complexa com a utilização das equações
RANS [14].
O modelo 𝛾 − 𝑅𝑒𝜃 é aplicável com o modelo de turbulência 𝑘 − 𝜔 SST e requer a especificação, por parte
do utilizador no âmbito do STAR-CCM+, da free stream edge [15] (i.e., linha divisória da camada limite com
escoamento exterior) para definição de 𝑅𝑒𝜃𝑡, garantindo que a camada limite está sempre contida no interior dessa
região. A definição desta condição pode passar por a especificação de um iso-valor da magnitude do vetor de
vorticidade ou de uma distância à parede, sendo este a condição mais comum. A calibração do modelo é complexa,
contudo a parametrização predefinida do STAR-CCM+ é suficiente para responder a uma vasta gama de aplicações
típicas de engenharia [14].
2.3 SUPERFÍCIE LIVRE
Para simular o movimento de uma embarcação em água é necessário modelar a interface entre a água e o
ar – a superfície livre (free surface). A modelação da superfície livre pode ser abordada numericamente através de
duas técnicas distintas:
Free surface fitting/morphing, que consiste em definir como superfície livre uma fronteira do
domínio computacional e onde a discretização espacial se ajusta à forma dessa superfície livre;

21
Free surface capturing, que consiste num domínio computacional estático e onde a superfície livre
é definida por uma função escalar no domínio para definir os diferentes fluidos com base no
resultado dos cálculos do campo de pressões;
Em aplicações de engenharia naval, é frequente usar o método Volume Of Fluid (VOF) [16] (surface
capturing), também adotado no presente trabalho, que define frações de volume 𝛼 para cada fluido (ar e água) em
função do rácio entre os volumes dos fluidos numa célula e o volume total dessa célula, equação (21). A interface
dos fluidos é definida quando 𝛼á𝑔𝑢𝑎 = 𝛼𝑎𝑟 = 0,5, onde os fluidos partilham a mesma velocidade e pressão. As
equações de quantidade de movimento e da continuidade são resolvidas com base em propriedades de mistura
entre os dois fluidos, equações (22) e (23). Por último, é necessário resolver equações adicionais de transporte de
ambas as frações de volume, equações (24) e (25).
𝛼𝑎𝑟 = 1 − 𝛼á𝑔𝑢𝑎 =𝑉𝑎𝑟
𝑉𝑎𝑟 + 𝑉á𝑔𝑢𝑎
(21)
𝜌 = 𝛼𝑎𝑟 ∙ 𝜌𝑎𝑟 + 𝛼á𝑔𝑢𝑎 ∙ 𝜌á𝑔𝑢𝑎 (22)
𝜇 = 𝛼𝑎𝑟 ∙ 𝜇𝑎𝑟 + 𝛼á𝑔𝑢𝑎 ∙ 𝜇á𝑔𝑢𝑎 (23)
𝜕𝛼𝑎𝑟
𝜕𝑡+ 𝑈𝑖
𝜕𝛼𝑎𝑟
𝜕𝑥𝑖
= 0 (24)
𝜕𝛼á𝑔𝑢𝑎
𝜕𝑡+ 𝑈𝑖
𝜕𝛼á𝑔𝑢𝑎
𝜕𝑥𝑖
= 0 (25)
Na qualidade de fluidos imiscíveis, é exigida a definição de uma interface fina com transições bruscas entre
os fluidos (em 3 a 5 células). No STAR-CCM+ esta interface é possível de resolver recorrendo ao esquema numérico
de segunda ordem HRIC (High-Resolution Interface Capturing [17]), em alternativa a outros de ordem superior que
falhariam devido à grande difusão numérica das frações de volume dos fluidos. O STAR-CCM+ faz a ponderação entre
os esquemas em função dos números de Courant locais inferior e superior (𝐶𝐹𝐿𝑙 e 𝐶𝐹𝐿𝑢, respetivamente). Em
problemas onde apenas a solução estacionária tem interesse, o esquema HRIC deverá ser sempre usado para se
obter a interface fina independentemente das discretizações temporais. Para tal, o número de Courant inferior
deverá ser sempre maior que o máximo número de Courant verificado na superfície livre.
A interação entre fluidos imiscíveis pressupõe uma tensão superficial entre ambos. Adicionalmente, quando
em contacto com uma parede verifica-se a formação de um ângulo de contacto 𝛼𝑐, em resultado da tensão
superficial, que define a forma da interface entre os fluidos, figura 14. Em função deste ângulo, característico do par
de fluidos, a superfície poderá ser molhada ou seca, conforme ilustrado na figura. Contudo, as forças tangenciais de
superfície perdem relevância face à grandeza das forças hidrodinâmicas do problema, pelo que, nestes casos, é
frequente assumir-se um ângulo de contacto padrão de 90° para par ar-água.
22
Figura 14 - Ângulo de contacto. À esquerda a superfície é molhada, enquanto que à direita a superfície é seca pelo fluido mais denso
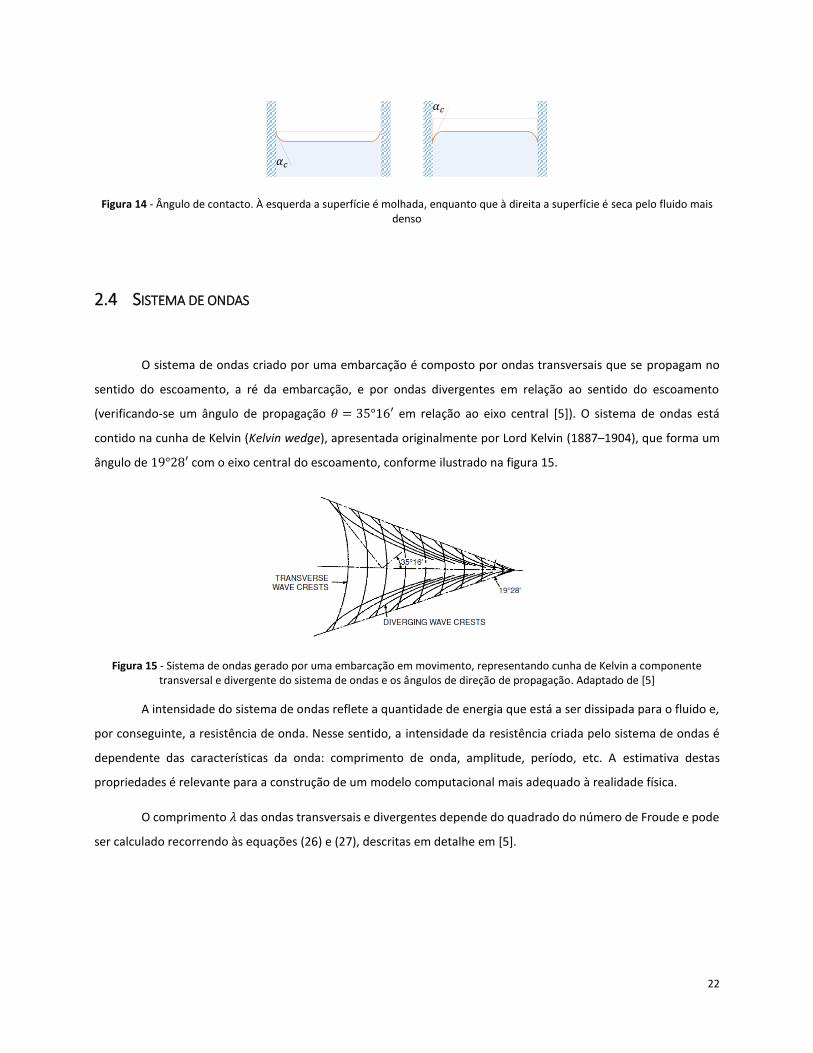
2.4 SISTEMA DE ONDAS
O sistema de ondas criado por uma embarcação é composto por ondas transversais que se propagam no
sentido do escoamento, a ré da embarcação, e por ondas divergentes em relação ao sentido do escoamento
(verificando-se um ângulo de propagação 𝜃 = 35°16′ em relação ao eixo central [5]). O sistema de ondas está
contido na cunha de Kelvin (Kelvin wedge), apresentada originalmente por Lord Kelvin (1887–1904), que forma um
ângulo de 19°28′ com o eixo central do escoamento, conforme ilustrado na figura 15.
Figura 15 - Sistema de ondas gerado por uma embarcação em movimento, representando cunha de Kelvin a componente transversal e divergente do sistema de ondas e os ângulos de direção de propagação. Adaptado de [5]
A intensidade do sistema de ondas reflete a quantidade de energia que está a ser dissipada para o fluido e,
por conseguinte, a resistência de onda. Nesse sentido, a intensidade da resistência criada pelo sistema de ondas é
dependente das características da onda: comprimento de onda, amplitude, período, etc. A estimativa destas
propriedades é relevante para a construção de um modelo computacional mais adequado à realidade física.
O comprimento 𝜆 das ondas transversais e divergentes depende do quadrado do número de Froude e pode
ser calculado recorrendo às equações (26) e (27), descritas em detalhe em [5].
𝛼𝑐
𝛼𝑐

23
𝜆𝑇
𝐿𝑟𝑒𝑓
= 2𝜋𝐹𝑟2 (26)
𝜆𝐷
𝐿𝑟𝑒𝑓
=4𝜋
3𝐹𝑟2 (27)
em que 𝑇 e 𝐷 representam a onda transversal e divergente, respetivamente, e 𝐿𝑟𝑒𝑓 o comprimento do casco. As
equações acima permitem reconhecer que para números de Froude superiores a ~0,4 e ~0,5, onda transversal e
divergente respetivamente, o comprimento da onda é superior ao comprimento do casco. Adicionalmente, o
comprimento da onda transversal é superior ao da onda divergente por um fator de 3 2⁄ .
O sistema de ondas total provocado por uma embarcação é o resultado da sobreposição das ondas criadas
na proa e na popa do caso. A amplitude 𝜉 do sistema pode ser descrito recorrendo à equação (28), detalhada em [5],
𝜉(𝑥, 0)𝐿
𝑆=
1
𝐹𝑟√
2
𝜋× [√
1𝑥𝐿
+ 0,5cos (
1
𝐹𝑟2(
𝑥
𝐿+ 0,5) +
𝜋
4) − √
1𝑥𝐿
− 0,5cos (
1
𝐹𝑟2(
𝑥
𝐿− 0,5) +
𝜋
4)] (28)
onde 𝑆 é área de balizas máxima do volume submerso (i.e., secção transversal), 𝐿 o comprimento do casco e 𝑥 a
distância em que a amplitude é avaliada (amplitude máxima quando 𝑥 → 0), em relação ao fim do casco. Devido aos
efeitos de cancelamento e amplificação, um aumento do número de Froude não implica necessariamente um
aumento da amplitude do sistema de ondas. Este facto é visível na figura 16, retirada de [5], onde são apresentadas
as amplitudes individuais e totais, para 𝐹𝑟 = 0,4, 𝐹𝑟 = 0,5 e 𝐹𝑟 = 0,8, onde se verificam os efeitos de cancelamento
para 𝐹𝑟 = 0,4 e amplificação para 𝐹𝑟 = 0,5.
Figura 16 - Amplitude do sistema de ondas a diferentes números de Froude. Adaptado de [5]
Em embarcações de alta velocidade (𝐹𝑟 > 0,5) é comum os cascos terem transom sterns, ou seja, um plano
vertical na popa. Este tipo de geometria da popa favorece menores resistências a altas velocidades em resultado de
se verificar um transom seco (dry transom). A estas velocidades, a baixa pressão verificada no transom faz diminuir
a cota da superfície livre em relação à cota não perturbada e permite que não haja separação do escoamento de
água (que sai tangencialmente à superfície) conseguindo-se, portanto, uma resistência de pressão menor. A
recuperação da pressão provoca a formação de uma onda a jusante da popa, cuja amplitude pode ser calculada

24
recorrendo à equação (29) [18], definindo o número de Froude com base no deslocamento máximo do casco (draft2),
na equação (30), [19]. A baixas velocidades, a diminuição da pressão não é suficiente para que o fenómeno ocorra e,
portanto, verifica-se um wetted transom.
A figura 17 ilustra o caso de wetted transom, com recirculação do escoamento de água, e de dry transom,
com continuidade tangencial do escoamento de água.
Figura 17 - Ilustração do transom seco e da onda gerada
𝜉𝑚𝑎𝑥 = 1,59𝐷2𝛼𝑘
𝜋𝐹𝑟𝐷 (29)
𝐹𝑟𝐷 =𝑈
√𝑔𝐷 (30)
onde 𝐷 é o deslocamento máximo, 𝑈 a velocidade da embarcação e 𝛼𝑘 o ângulo da cunha de Kelvin (𝛼𝑘 = 19,28°).
Adicionalmente, a velocidade da onda 𝑐, a frequência angular 𝜔, o número de onda 𝑘 e o período 𝑃 do
sistema de ondas podem facilmente ser calculados recorrendo às equações (31), (32), (33) e (34), respetivamente
[2].
𝑐 =𝜔
𝑘= √
𝑔𝜆
2𝜋 (31)
𝑘 =2𝜋
𝜆 (32)
𝜔 = √𝑘𝑔 (33)
𝑃 =1
𝜔 (34)
2 Draft em inglês americano, ou draught em inglês britânico.
𝑝 −
superfície livre não perturbada onda do transom
dry transom

25
2.5 VERIFICAÇÃO DA SOLUÇÃO
À resolução de problemas físicos de mecânica de fluidos através de modelos numéricos está associada uma
incerteza numérica resultante de erros numéricos de três naturezas: erros iterativos, erros de arredondamento e
erros de discretização. Tipicamente, a maior contribuição é de origem de discretização do modelo, pois a precisão
dupla característica da computação corrente e a redução dos resíduos superior a três ordens de grandeza permitem
desprezar estes erros comparativamente ao erro de discretização [20].
A verificação da solução tem como objetivo estimar a incerteza numérica, 𝑈𝜙, de uma solução escalar, 𝜙𝑖,
quando não é conhecida a respetiva solução exata, 𝜙0. A incerteza numérica calculada deve satisfazer a equação (35)
com 95% de confiança, o que implica garantir que a solução exata está contida no intervalo definido.
ϕi − Uϕ ≤ 𝜙0 ≤ 𝜙𝑖 + 𝑈𝜙 (35)
A determinação da incerteza numérica requer a estimativa do erro numérico (que se assume igual ao erro
de discretização) recorrendo ao procedimento definido em [20], onde a estimativa do erro de discretização é feita
recorrendo à expansão em série de potência truncada, equação (36).
𝑒𝜙 = 𝛿𝑅𝐸 = 𝜙𝑖 − 𝜙0 = 𝛼ℎ𝑖𝑝
(36)
onde 𝜙𝑖 é a solução numérica de uma dada malha 𝑖 , 𝜙0 a solução exata do problema a resolver, 𝛼 uma constante,
ℎ𝑖 o tamanho característico que a caracteriza e 𝑝 a ordem de convergência observada. A resolução da equação (36)
requer a determinação das três incógnitas – 𝜙0, 𝛼 e 𝑝 -, que pode ser conseguido usando três malhas diferentes.
Alternativamente, o procedimento prevê o calculo do erro recorrendo a uma das equações (37), (38) ou (39), no caso
de a ordem de convergência 𝑝 esteja fora do intervalo 0,5 ≤ 𝑝 ≤ 2.
𝛿1 = 𝛼ℎ𝑖 (37)
𝛿2 = 𝛼ℎ𝑖2 (38)
𝛿12 = 𝛼1ℎ𝑖 + 𝛼2ℎ𝑖2 (39)
Apesar das expressões acima apenas requerem a utilização de três malhas, o procedimento recomenda a
utilização de quatro ou mais malhas de modo a diminuir as perturbações de ruído dos dados no cálculo, recorrendo
para tal ao método dos mínimos quadrados (descrito em detalhe no procedimento).
Por fim, a estimativa da incerteza numérica 𝑈𝜙 do problema pode ser calculada recorrendo às equações (40)
ou (41), mediante a qualidade dos dados disponível. A equação (40) deve ser usada quando 𝜎 < Δ𝜙, enquanto que
a equação (41) deve ser aplicada no intervalo oposto. Δ𝜙 é o parâmetro de medição da amplitude dos dados e pode

26
ser calculado recorrendo à equação (42), onde 𝑛𝑔 é o número total de dados. Deve usar-se o fator de segurança 𝐹𝑠 =
1,25 sempre que se verifique 0,5 ≤ 𝑝 < 2,1 e 𝜎 < Δ𝜙 ou, caso contrário, 𝐹𝑠 = 3.
𝑈𝜙(𝜙𝑖) = 𝐹𝑠𝑒𝜙(𝜙𝑖) + 𝜎 + |𝜙𝑖 − 𝜙𝑓𝑖𝑡| (40)
𝑈𝜙(𝜙𝑖) = 𝐹𝑠
𝜎
Δ𝜙
(𝑒𝜙(𝜙𝑖) + 𝜎 + |𝜙𝑖 − 𝜙𝑓𝑖𝑡|) (41)
Δϕ =(𝜙𝑖)𝑚𝑎𝑥−(𝜙𝑖)𝑚𝑖𝑛
𝑛𝑔 − 1 (42)
No presente texto foi utilizada a rotina computacional que acompanha o procedimento referido, pelo que
são omissos mais detalhes e apenas serão apresentados os resultados finais do procedimento, outputs da rotina.
Por último, o procedimento descrito pressupõe malhas que respeitem as seguintes características de
semelhança:
Razão de refinamento constante 𝑟 = ℎ𝑒𝑠𝑝𝑎𝑟𝑠𝑎/ℎ𝑓𝑖𝑛𝑎 (sendo ℎ a dimensão característica da malha)
Tipologia de malhas iguais (regiões de refinamento, etc.)
Parâmetros de qualidade de malha semelhantes (cell e boundary skewness angles, face validity, cell
quality e volume change)
27
3 ESTUDO SEM SUPERFÍCIE LIVRE
3.1 OBJETIVO
A primeira fase do trabalho consiste no estudo da hidrodinâmica do catamaran em regime estacionário não
considerando os efeitos da superfície livre, i.e., estudando apenas o volume submerso do casco, usando a condição
de plano de simetria para simular a superfície livre. Esta fase tem como objetivo conhecer o caso em estudo,
suportando decisões sobre as opções numéricas da segunda fase do trabalho – estudo com superfície livre. Nesta
fase será ainda feito o exercício de verificação da solução obtida e estimada a incerteza numérica associada à
discretização espacial do problema em estudo.
3.2 PRÉ-PROCESSAMENTO
3.2.1 Determinação da linha de água
A determinação do volume submerso do catamaran implica a determinação da posição da linha de água em
situação de equilíbrio. Conforme já referido, admite-se o equilíbrio de momentos nas direções X e Z, pelo que apenas
são necessárias duas condições para a definição da posição de equilíbrio do catamaran [21]:
Estabilidade vertical;
Estabilidade longitudinal;
A estabilidade vertical é definida pela equação (10) que pressupõe o equilíbrio entre o peso da embarcação
e a impulsão devida ao volume de fluido deslocado. Resolvendo a equação (10) e considerando as massas do
catamaran apresentadas na tabela 2, obtém-se que a condição de equilíbrio exige um volume submerso ∇𝑠𝑢𝑏𝑚𝑒𝑟𝑠𝑜=
0,29 𝑚3.
Componente Massa
Embarcação 150 𝑘𝑔
Tripulantes 150 𝑘𝑔
Total 300 𝑘𝑔
Tabela 2 – Massa do catamaran
A estabilidade longitudinal requer alinhamento vertical entre o centro de gravidade da embarcação e o
centro geométrico do volume submerso. Até esta condição se verificar, a embarcação irá rodar longitudinalmente

28
sobre o seu centro de flutuação, definido como o centroide da figura de flutuação (interseção do plano da linha de
água com o volume submerso), até atingir a posição de equilíbrio.
A determinação da posição de equilíbrio foi efetuada iterativamente no programa de CAD Solidworks que
calcula automaticamente a dimensão do volume submerso, o centroide da figura de flutuação e o centro de
gravidade da embarcação, com base na geometria fornecida e na introdução no programa das propriedades mássicas
de cada um dos componentes. A tripulação não está modelada em CAD, mas, para o cálculo da linha de água, admitiu-
se que se localizava entre as vigas transversais a 30% do comprimento do casco, conforme assinalado na figura 18.
Figura 18 - Geometria utilizada para determinação da linha de água. Na figura está assinala a posição da tripulação
Relativamente ao referencial usado no presente trabalho, a linha de água calculada está à cota 𝑧 =
0,1495 𝑚. A figura 19 ilustra o catamaran e a posição da linha de água.
Figura 19 - Posição da linha de água calculada
𝑍
𝑋

29
3.2.2 Geometria
Para a simulação hidrodinâmica não considerando os efeitos da superfície livre, o modelo computacional do
catamaran em estudo é composto pela porção submersa do casco (hull) e dos apêndices (rudder, winglets3 e
daggerboard), ou seja, cortados pela linha de água, conforme ilustra a figura 20:
Figura 20 – Geometria do catamaran para o estudo sem superfície livre
O catamaran está envolvido num domínio paralelepipédico cujas fronteiras se se designaram por:
Inlet: fronteira a montante, com prescrição de velocidade de entrada do escoamento no domínio;
Outlet: fronteira a jusante, com prescrição de pressão de saída do escoamento no domínio;
SlipWalls: fronteiras laterais e inferior, do tipo parede com escorregamento;
SymmPlane: fronteira de topo, do tipo plano de simetria do domínio;
3.2.3 Mallha
O modelo computacional foi discretizado numa malha de superfície tipo triangular, em volumes tipo
hexaedros no domínio e em prismas junto às paredes do catamaran. Os detalhes da parametrização de cada um são
apresentados nos capítulos que se seguem.
3 Os winglets são apêndices hidrodinâmicos adicionados posteriormente ao protótipo apresentado na figura 5
Casco (hull)
Daggerboard Rudder
Winglets
𝑋
Z
𝑌
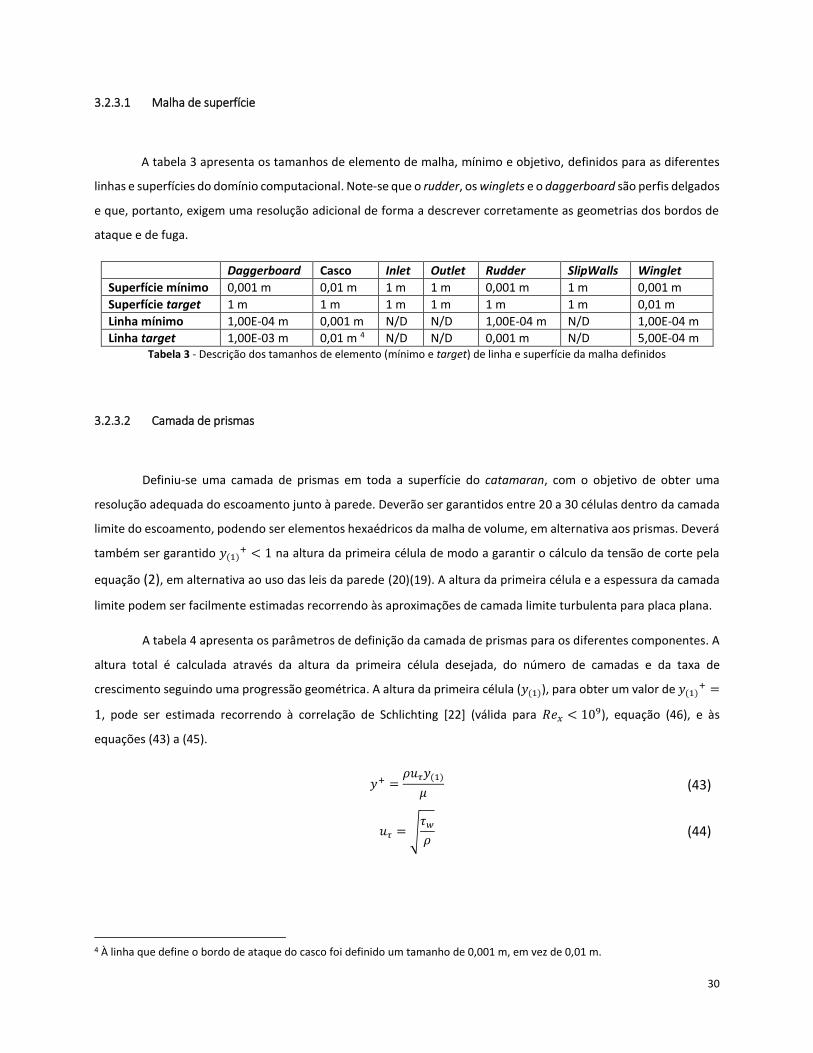
30
3.2.3.1 Malha de superfície
A tabela 3 apresenta os tamanhos de elemento de malha, mínimo e objetivo, definidos para as diferentes
linhas e superfícies do domínio computacional. Note-se que o rudder, os winglets e o daggerboard são perfis delgados
e que, portanto, exigem uma resolução adicional de forma a descrever corretamente as geometrias dos bordos de
ataque e de fuga.
Daggerboard Casco Inlet Outlet Rudder SlipWalls Winglet
Superfície mínimo 0,001 m 0,01 m 1 m 1 m 0,001 m 1 m 0,001 m
Superfície target 1 m 1 m 1 m 1 m 1 m 1 m 0,01 m
Linha mínimo 1,00E-04 m 0,001 m N/D N/D 1,00E-04 m N/D 1,00E-04 m
Linha target 1,00E-03 m 0,01 m 4 N/D N/D 0,001 m N/D 5,00E-04 m Tabela 3 - Descrição dos tamanhos de elemento (mínimo e target) de linha e superfície da malha definidos
3.2.3.2 Camada de prismas
Definiu-se uma camada de prismas em toda a superfície do catamaran, com o objetivo de obter uma
resolução adequada do escoamento junto à parede. Deverão ser garantidos entre 20 a 30 células dentro da camada
limite do escoamento, podendo ser elementos hexaédricos da malha de volume, em alternativa aos prismas. Deverá
também ser garantido 𝑦(1)+ < 1 na altura da primeira célula de modo a garantir o cálculo da tensão de corte pela
equação (2), em alternativa ao uso das leis da parede (20)(19). A altura da primeira célula e a espessura da camada
limite podem ser facilmente estimadas recorrendo às aproximações de camada limite turbulenta para placa plana.
A tabela 4 apresenta os parâmetros de definição da camada de prismas para os diferentes componentes. A
altura total é calculada através da altura da primeira célula desejada, do número de camadas e da taxa de
crescimento seguindo uma progressão geométrica. A altura da primeira célula (𝑦(1)), para obter um valor de 𝑦(1)+ =
1, pode ser estimada recorrendo à correlação de Schlichting [22] (válida para 𝑅𝑒𝑥 < 109), equação (46), e às
equações (43) a (45).
𝑦+ =𝜌𝑢𝜏𝑦(1)
𝜇 (43)
𝑢𝜏 = √𝜏𝑤
𝜌 (44)
4 À linha que define o bordo de ataque do casco foi definido um tamanho de 0,001 m, em vez de 0,01 m.
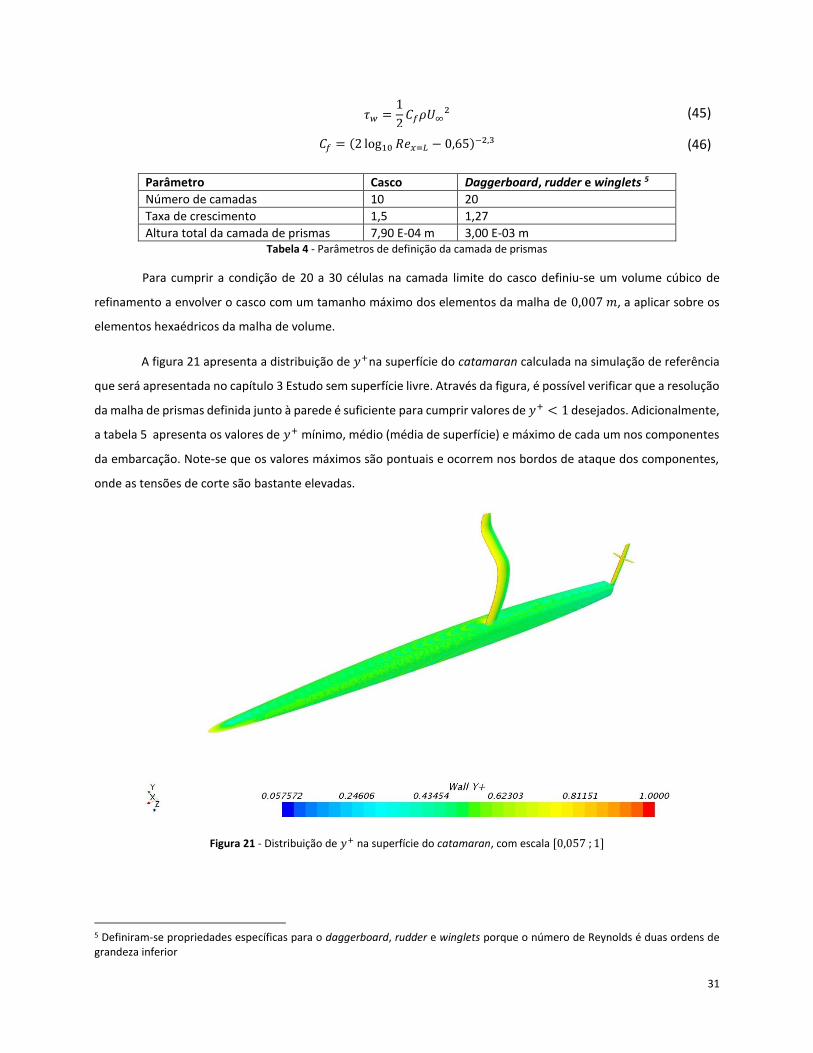
31
𝜏𝑤 =1
2𝐶𝑓𝜌𝑈∞
2 (45)
𝐶𝑓 = (2 log10 𝑅𝑒𝑥=𝐿 − 0,65)−2,3 (46)
Parâmetro Casco Daggerboard, rudder e winglets 5
Número de camadas 10 20
Taxa de crescimento 1,5 1,27
Altura total da camada de prismas 7,90 E-04 m 3,00 E-03 m Tabela 4 - Parâmetros de definição da camada de prismas
Para cumprir a condição de 20 a 30 células na camada limite do casco definiu-se um volume cúbico de
refinamento a envolver o casco com um tamanho máximo dos elementos da malha de 0,007 𝑚, a aplicar sobre os
elementos hexaédricos da malha de volume.
A figura 21 apresenta a distribuição de 𝑦+na superfície do catamaran calculada na simulação de referência
que será apresentada no capítulo 3 Estudo sem superfície livre. Através da figura, é possível verificar que a resolução
da malha de prismas definida junto à parede é suficiente para cumprir valores de 𝑦+ < 1 desejados. Adicionalmente,
a tabela 5 apresenta os valores de 𝑦+ mínimo, médio (média de superfície) e máximo de cada um nos componentes
da embarcação. Note-se que os valores máximos são pontuais e ocorrem nos bordos de ataque dos componentes,
onde as tensões de corte são bastante elevadas.
Figura 21 - Distribuição de 𝑦+ na superfície do catamaran, com escala [0,057 ; 1]
5 Definiram-se propriedades específicas para o daggerboard, rudder e winglets porque o número de Reynolds é duas ordens de grandeza inferior
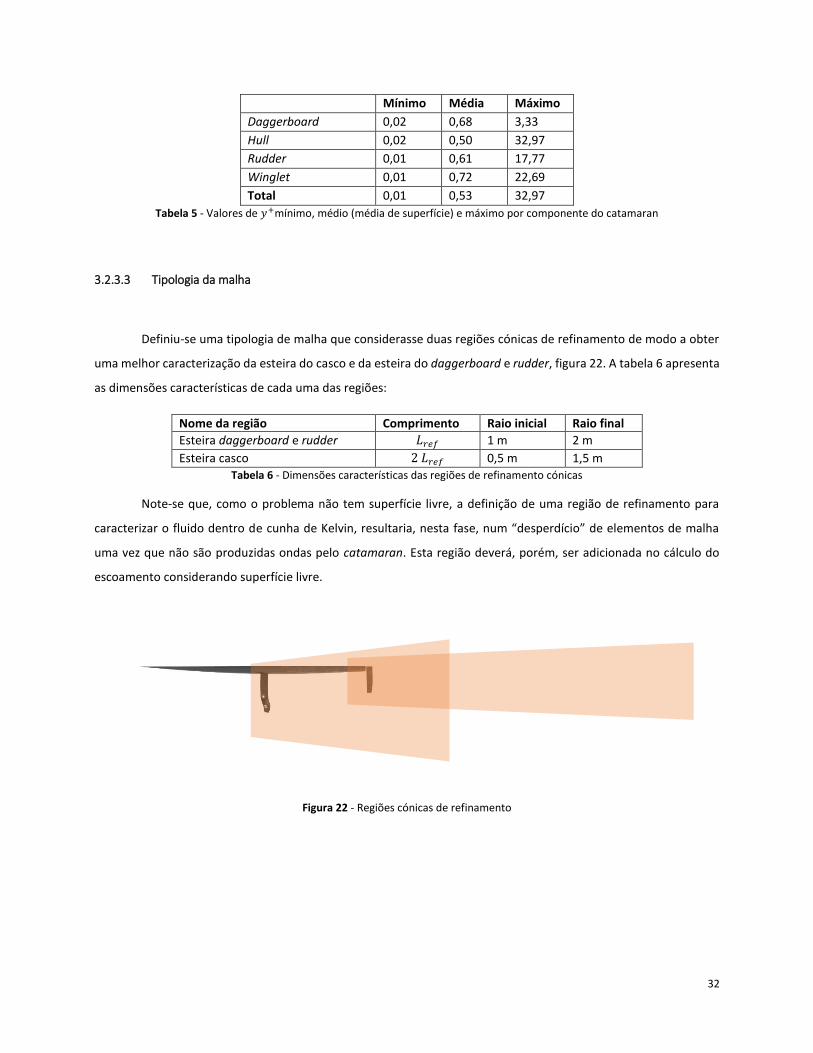
32
Mínimo Média Máximo
Daggerboard 0,02 0,68 3,33
Hull 0,02 0,50 32,97
Rudder 0,01 0,61 17,77
Winglet 0,01 0,72 22,69
Total 0,01 0,53 32,97
Tabela 5 - Valores de 𝑦+mínimo, médio (média de superfície) e máximo por componente do catamaran
3.2.3.3 Tipologia da malha
Definiu-se uma tipologia de malha que considerasse duas regiões cónicas de refinamento de modo a obter
uma melhor caracterização da esteira do casco e da esteira do daggerboard e rudder, figura 22. A tabela 6 apresenta
as dimensões características de cada uma das regiões:
Nome da região Comprimento Raio inicial Raio final
Esteira daggerboard e rudder 𝐿𝑟𝑒𝑓 1 m 2 m
Esteira casco 2 𝐿𝑟𝑒𝑓 0,5 m 1,5 m
Tabela 6 - Dimensões características das regiões de refinamento cónicas
Note-se que, como o problema não tem superfície livre, a definição de uma região de refinamento para
caracterizar o fluido dentro de cunha de Kelvin, resultaria, nesta fase, num “desperdício” de elementos de malha
uma vez que não são produzidas ondas pelo catamaran. Esta região deverá, porém, ser adicionada no cálculo do
escoamento considerando superfície livre.
Figura 22 - Regiões cónicas de refinamento

33
3.2.3.4 Domínio computacional
A tabela 7 apresenta as dimensões relativas definidas para o domínio do modelo computacional, ilustrado
na figura 23. Os valores apresentados foram definidos com base em experiências anteriores e nas práticas de
referência do STAR-CCM+ [15]. A altura e largura são medidas relativamente à origem do referencial. O comprimento
considera 1,5 𝐿𝑟𝑒𝑓 a vante da proa do casco e 7,5 𝐿𝑟𝑒𝑓 a ré da popa do casco.
Dimensão Valor
Comprimento 10 𝐿𝑟𝑒𝑓
Largura 10 𝐿𝑟𝑒𝑓
Altura 5 𝐿𝑟𝑒𝑓
Tabela 7 - Dimensões do domínio computacional
Figura 23 - Dimensões do domínio computacional
3.2.4 Modelos físicos
O cálculo foi efetuado no programa STAR-CCM +, recorrendo ao modelo de turbulência 𝑘-𝜔 SST para o
cálculo das RANSE (Reynolds Average Navier-Stokes Equations), utilizando um esquema de resolução da camada
limite “all 𝑦+ wall treatment”. Este esquema híbrido faz a ponderação local para o cálculo da tensão de corte na
parede, através da lei da parede (𝑦+ > 30) ou resolvendo a camada limite até à parede (𝑦+ → 0).
10 𝐿
5 𝐿
10 𝐿

34
A tabela 8 apresenta as condições de fronteira definidas:
Parâmetro Valor
Inlet Velocity inlet
Velocidade [−5,1444 ; 0 ; 0] 𝑚/𝑠
Turbulência
Intensidade turbulência (𝐼) 0,01
Rácio de viscosidade turbulenta (𝛽) 10
Outlet Pressure outlet
Pressure value 0 𝑃𝑎
Turbulência
Intensidade turbulência (𝐼) 0,01
Rácio de viscosidade turbulenta (𝛽) 10
SymmPlane Plano de simetria
SlipWalls Parede de escorregamento
Shear stress specification Slip Tabela 8 - Condições de fronteira definidas para o problema
Como o problema pretende determinar as forças hidrodinâmicas que atuam no catamaran, o cálculo foi
monitorizado recorrendo aos resíduos dos modelos computacionais e às variáveis de interesse, ou seja, as forças em
X, Y e Z. Considerou-se a simulação iterativamente convergida quando se verificaram variações das variáveis de
interesse inferiores a 0,5% e uma estabilização dos resíduos. Não verificou necessidade de modificar nenhum
parâmetro de convergência do modelo, uma vez que os resíduos diminuíram tipicamente entre 4 a 6 ordens de
grandeza.
3.3 VERIFICAÇÃO DA SOLUÇÃO
Para a verificação dos resultados, foram usadas quatro malhas com a mesma tipologia (incluindo, A altura
total da camada de prismas constante) e com uma razão de refinamento entre malhas constante (𝑟 =
ℎ𝑒𝑠𝑝𝑎𝑟𝑠𝑎 ℎ𝑓𝑖𝑛𝑎 = √23
≈ 1,26⁄ ), aplicada a todos os comprimentos dos elementos de malha definidos.
O refinamento de malha deverá pressupor que os parâmetros de qualidade da malha se mantêm constantes.
A tabela tabela 9 apresenta as médias de superfície dos diferentes parâmetros de avaliação da qualidade da malha.
Apesar da validade das faces e da qualidade das células não sofrerem alterações, as variações verificadas para o
ângulo de skewness e para o volume change poderão conduzir ao aparecimento de algum ruído nos resultados,
podendo conduzir ao cálculo de incertezas mais elevadas. A dificuldade em manter constante estes valores é uma
característica muito comum de malhas não estruturas [20].
35
𝒊 𝒉𝒊 𝒉𝒊 𝒉𝟏⁄ Cell quality (~𝟏) Face validity (= 𝟏) Skewness (< 𝟖𝟓°) Volume change (> 𝟏 × 𝟏𝟎−𝟓)
1 0,6 1 0,97 1,00 10,66° 0,66
2 0,79 1,26 0,97 1,00 13,26° 0,60
3 1 1,59 0,97 1,00 8,43° 0,72
4 1,26 2 0,97 1,00 6,70° 0,76
Tabela 9 - Parâmetros de avaliação de qualidade da malha. Os valores representam uma média ne superfície do catamaran
A tabela tabela 10 apresenta os resultados das diferentes simulações de refinamento da malha (a simulação
inicial corresponde ao índice 3 com ℎ𝑖 = 1):
𝒊 𝒉𝒊 𝒉𝒊 𝒉𝟏⁄ Fx [N] Fy [N] Fz [N]
1 0,6 1 -2,45E+02 1,62E+03 4,37E+02
2 0,79 1,26 -2,43E+02 1,62E+03 4,38E+02
3 1 1,59 -2,42E+02 1,63E+03 4,37E+02
4 1,26 2 -2,41E+02 1,63E+03 4,36E+02
Tabela 10 - Resultados de forças calculados
Recorrendo ao procedimento apresentado no capítulo 2.5 Verificação da solução, a tabela tabela 11
apresenta para cada variável de interesse:
A estimativa da solução exata do problema a resolver;
O erro relativo entre ℎ0 e ℎ1;
A equação da convergência usada para o cálculo do erro (entre as equações (36) a (39));
A incerteza associada à malha mais fina;
O parâmetro de avaliação do ruído dos resultados 𝜎/Δ𝜙
A tabela 11 é complementada com a figura 24, que ilustra os gráficos de convergência das diferentes
variáveis de interesse.
Fx Fy Fz
𝒉𝟏 -2,45E+02 N 1,62E+03 N 4,37E+02 N
𝒉𝟎 -2,54E+02 N 1,61E+03 N 4,38E+02 N
Erro relativo 3,5% 0,5% 0,3%
Convergência 𝛼1ℎ𝑖 + 𝛼2ℎ𝑖2 𝛼ℎ𝑖 𝛼ℎ𝑖
2
Incerteza 27,50 N (11%) 42 N (3%) 6 N (1%) 𝝈
𝚫𝛟⁄ 26% 112% 109%
Tabela 11 – Resultados da verificação dos resultados para as variáveis de interesse
Devido ao ruído nos dados, a ordem de convergência 𝑝 observada pela equação (36) não satisfaz o requisito
de 0,5 ≤ 𝑝 ≤ 2 para nenhuma das variáveis de interesse, pelo que foram usadas alternativamente as equações (37)
a (39) conforme se obtivesse uma melhor adequação aos dados. Igualmente, o cálculo da incerteza foi feito
recorrendo à equação (41) usando um fator de segurança 𝐹𝑠 = 3, conduzindo a incertezas numéricas

36
consideravelmente mais conservadoras. Apesar do ruído dos dados, verificam-se erros pequenos (inferiores a
~3,5%) das forças e momentos relativamente à estimativa da solução exata do problema a resolver.
A diminuição dos erros relativos, do ruído dos dados e, por conseguinte, da incerteza numérica apenas seria
possível com sucessivos refinamentos adicionais da malha do modelo computacional. Tal iniciativa, refinando p.e.
até metade da atual malha mais fina, conduziria a um aumento de ~23 do número de elemento da malha do modelo
computacional, ou seja, um total de 253 milhões de elementos! O uso de uma malha desta dimensão é impraticável
na maioria dos problemas de engenharia, em particular em problemas com superfície livre que conduz a uma
complexidade adicional.
Figura 24 - Gráficos de convergência dos resultados de forças. Nos gráficos são apresentados os resultados calculados para as diferentes malhas, a estimativa da solução exata, a barra de incerteza para a malha mais fina e curva de convergência de erro.
Fx em cima à esquerda; Fy em cima à direita; Fz em baixo
37
A tabela tabela 12 apresenta os resultados de erro comparativos entre a simulação inicial (ℎ3) com a malha
mais fina (ℎ1) e as estimativas das soluções exatas dos problemas a resolver (ℎ0). Como seria expectável, erros
relativos à estimativa da solução exata do problema a resolver são ligeiramente maiores do que entre ℎ1 e ℎ0. mas
ainda assim aceitáveis. Os erros relativos entre ℎ3 e ℎ1 não são representativos, pelo que malha ℎ3 será usada como
referência ao longo do presente trabalho (inclusive no estudo com superfície livre). Esta malha permite simulações
muito mais económicas com uma poupança de 67% no número de elementos da malha (𝑁1 = 3,16 × 107 e 𝑁3 =
1,03 × 107) e ~69% no tempo de computação relativamente a ℎ1.
Fx Fy Fz
𝒉𝟎 -2,54E+02 N 1,61E+03 N 4,38E+02 N
𝒉𝟏 -2,45E+02 N 1,62E+03 N 4,37E+02 N
𝒉𝟑 -2,42E+02 N 1,63E+03 N 4,37E+02 N
Erro relativo a 𝒉𝟎 4,5% 1,1% 0,3%
Erro relativo a 𝒉𝟏 1,0% 0,6% 0,0%
Tabela 12 - Erros relativos dos resultados obtido com a malha ℎ3 em relação a ℎ0 e ℎ1
3.4 ANÁLISE DOS RESULTADOS DE REFERÊNCIA
3.4.1 Resultados iniciais
A tabela tabela 13 apresenta o resultado, por componente da embarcação, das forças calculadas. Conforme
expectável, o casco (hull) apresenta a maior contribuição para a força de resistência devido ao seu comprimento
significativo (~7 𝑚), e, portanto, à resistência de fricção associada, e à esteira criada na popa. Por outro lado, o
daggerboard, por ser um componente projetado para produzir forças aerodinâmicas de interesse, apresenta as
maiores magnitudes da força lateral e vertical (sustentação no referencial principal).
Fx [N] Fy [N] Fz [N]
Daggerboard -7,18E+01 1,45E+03 7,75E+02
Hull -1,55E+02 2,36E+02 -3,97E+02
Rudder -1,16E+01 -5,07E+01 5,20E+00
Winglet -3,52E+00 -4,82E+00 5,41E+01
Total -2,42E+02 1,63E+03 4,37E+02
Tabela 13 - Resultado das forças calculadas, por componente da embarcação6
A tabela 14 apresenta a comparação das componentes de pressão e viscosa das forças. A componente de
viscosa é dominante na força de resistência devido à grande extensão do casco e devido à reduzida resistência de
6 O cálculo não foi calculado considerando a distribuição de pressão hidrostática.
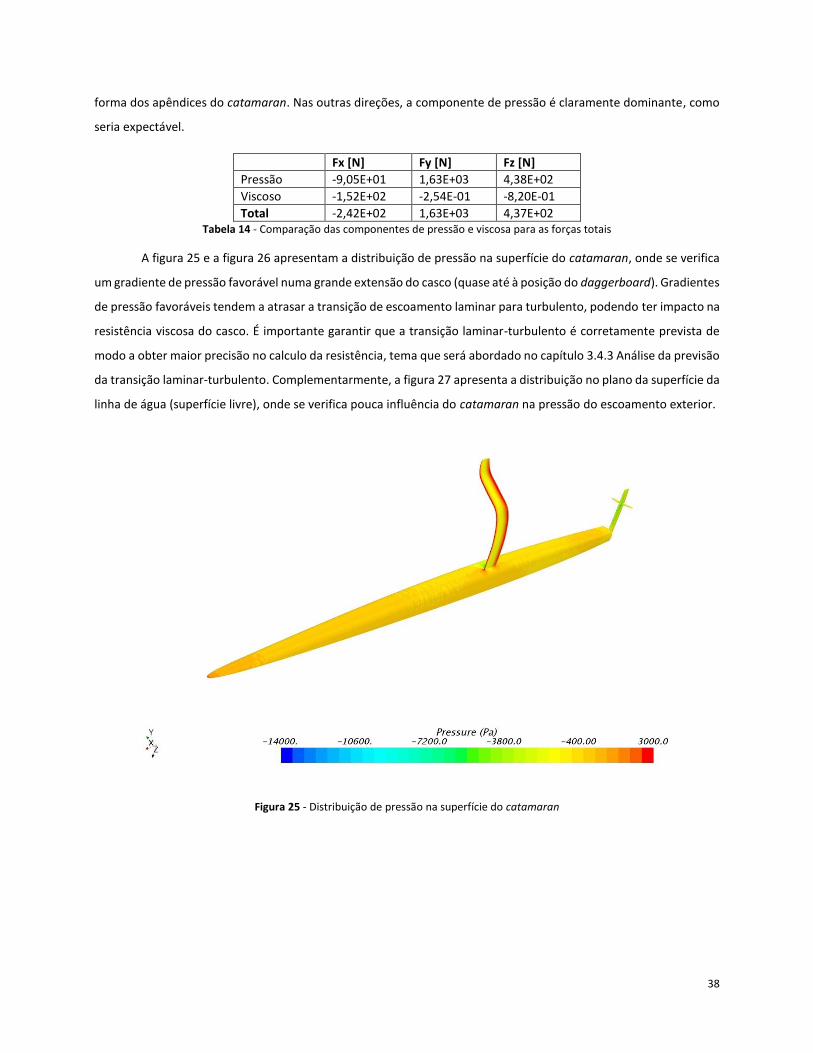
38
forma dos apêndices do catamaran. Nas outras direções, a componente de pressão é claramente dominante, como
seria expectável.
Fx [N] Fy [N] Fz [N]
Pressão -9,05E+01 1,63E+03 4,38E+02
Viscoso -1,52E+02 -2,54E-01 -8,20E-01
Total -2,42E+02 1,63E+03 4,37E+02 Tabela 14 - Comparação das componentes de pressão e viscosa para as forças totais
A figura 25 e a figura 26 apresentam a distribuição de pressão na superfície do catamaran, onde se verifica
um gradiente de pressão favorável numa grande extensão do casco (quase até à posição do daggerboard). Gradientes
de pressão favoráveis tendem a atrasar a transição de escoamento laminar para turbulento, podendo ter impacto na
resistência viscosa do casco. É importante garantir que a transição laminar-turbulento é corretamente prevista de
modo a obter maior precisão no calculo da resistência, tema que será abordado no capítulo 3.4.3 Análise da previsão
da transição laminar-turbulento. Complementarmente, a figura 27 apresenta a distribuição no plano da superfície da
linha de água (superfície livre), onde se verifica pouca influência do catamaran na pressão do escoamento exterior.
Figura 25 - Distribuição de pressão na superfície do catamaran

39
Figura 26 - Detalhe da distribuição de pressão na superfície do daggerboard (à esquerda) e do rudder (à direita)
Figura 27 - Distribuição da pressão no plano da superfície livre
A figura 28 e a figura 29 apresentam a distribuição da magnitude da tensão de corte, 𝜏𝑤, na superfície do
catamaran. Como esperado, verificam-se valores maiores da tensão de corte nos bordos de ataque dos vários
componentes, devido ao aumento da velocidade do fluido junto aos mesmos, e uma diminuição continua ao longo
da superfície dos componentes do catamaran.
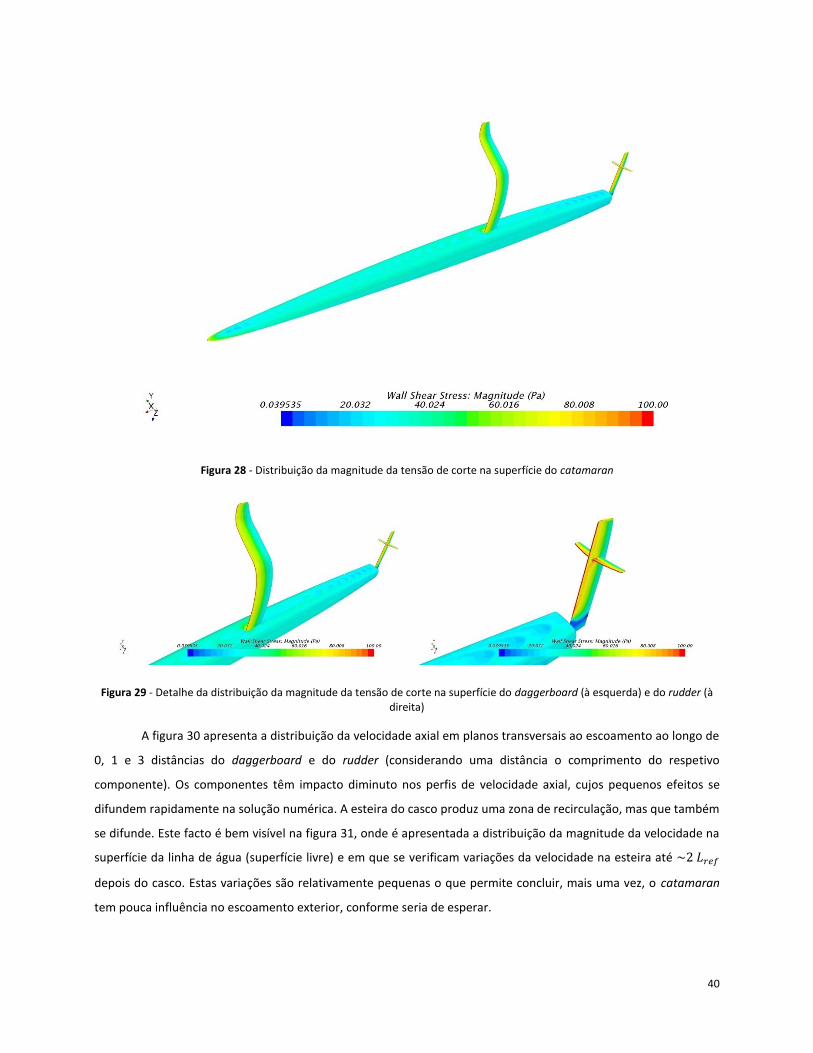
40
Figura 28 - Distribuição da magnitude da tensão de corte na superfície do catamaran
Figura 29 - Detalhe da distribuição da magnitude da tensão de corte na superfície do daggerboard (à esquerda) e do rudder (à direita)
A figura 30 apresenta a distribuição da velocidade axial em planos transversais ao escoamento ao longo de
0, 1 e 3 distâncias do daggerboard e do rudder (considerando uma distância o comprimento do respetivo
componente). Os componentes têm impacto diminuto nos perfis de velocidade axial, cujos pequenos efeitos se
difundem rapidamente na solução numérica. A esteira do casco produz uma zona de recirculação, mas que também
se difunde. Este facto é bem visível na figura 31, onde é apresentada a distribuição da magnitude da velocidade na
superfície da linha de água (superfície livre) e em que se verificam variações da velocidade na esteira até ~2 𝐿𝑟𝑒𝑓
depois do casco. Estas variações são relativamente pequenas o que permite concluir, mais uma vez, o catamaran
tem pouca influência no escoamento exterior, conforme seria de esperar.
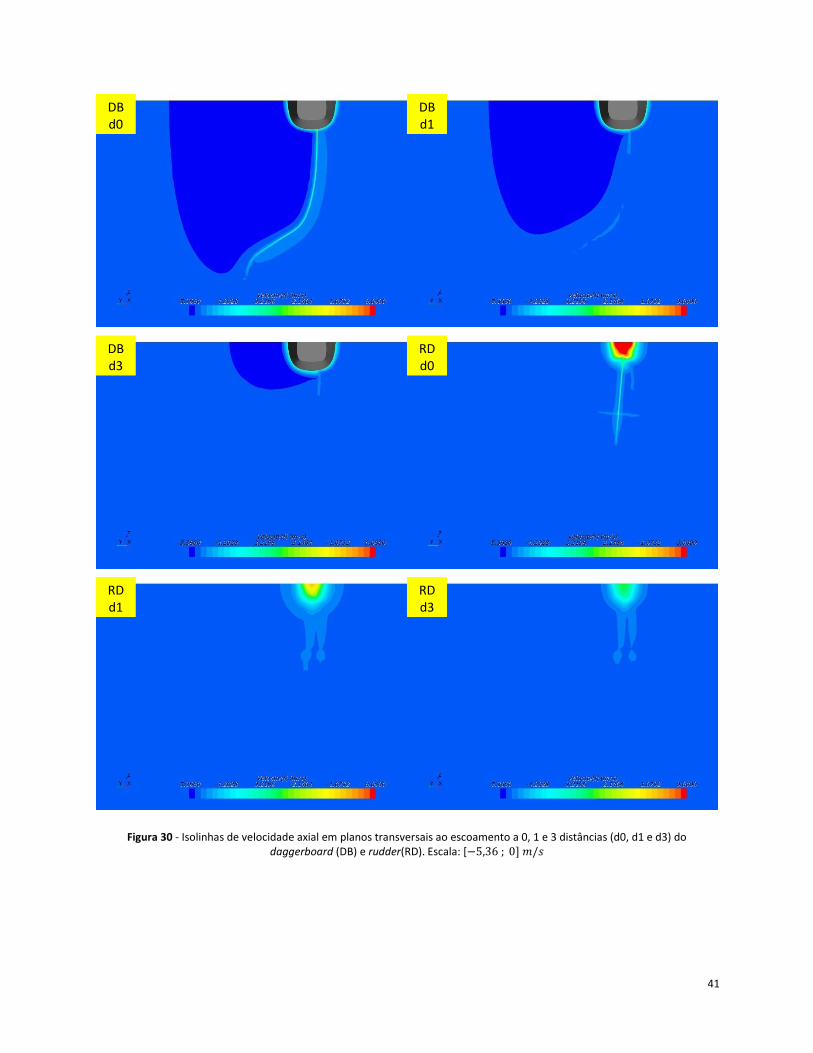
41
Figura 30 - Isolinhas de velocidade axial em planos transversais ao escoamento a 0, 1 e 3 distâncias (d0, d1 e d3) do daggerboard (DB) e rudder(RD). Escala: [−5,36 ; 0] 𝑚/𝑠
DB d0
DB d1
DB d3
RD d0
RD d1
RD d3

42
Figura 31 - Distribuição da magnitude da velocidade no plano da superfície livre
A figura 32 apresenta as isolinhas da vorticidade axial em planos transversais ao escoamento ao longo de 0,
1 e 3 distâncias do daggerboard e do rudder (considerando uma distância o comprimento do respetivo componente).
O daggerboard é um componente que produz grandes forças hidrodinâmicas que conduzem à produção de um
vórtice significativo, como se verifica na figura. A existência de um vórtice traduz um acréscimo na resistência de
pressão da embarcação (resistência induzida) proporcional ao quadrado da sustentação produzida, 𝐶𝐷 𝑖𝑛𝑑𝑢𝑧𝑖𝑑𝑜 ∝
𝐶𝐿2. Contudo, a resistência de pressão do daggerboard representa apenas 12% da resistência total (devido à
dominância da resistência viscosa do casco), apesar de representar 48% da resistência de pressão total. Os vórtices
provocados pelo rudder e winglets são de pequenas dimensões e difundem-se rapidamente na solução numérica.

43
Figura 32 - Isolinhas de vorticidade em planos transversais ao escoamento a 0, 1 e 3 distâncias (d0, d1 e d3) do daggerboard (DB) e rudder(RD). Escala: [−40 ; 40] 𝑠−1
DB d0
DB d1
DB d3
RD d0
RD d1
RD d3

44
3.4.2 Análise do esquema de resolução da camada limite
Verificando-se valores de 𝑦+ → 0 na maioria da superfície da embarcação, faz sentido avaliar a
adequabilidade do esquema de resolução da camada limite. Nesse sentido, foi efetuada uma simulação usando o
esquema “low 𝑦+ wall treatment”, em alternativa ao esquema híbrido “all 𝑦+ wall treatment”, já apresentado. A
tabela 15 apresenta os resultados comparativos entre ambos os esquemas, onde, conforme expectável, não se não
se verificam variações significativas dos resultados, nomeadamente na força de resistência, uma vez que o esquema
“all 𝑦+” calcula a tensão de corte pela equação (2), quando 𝑦+ < 1
Esquema de parede Fx Fy Fz My
All 𝑦+ -2,42E+02 N 1,63E+03 N 4,37E+02 N -4,65E+02 N.m
Low 𝑦+ 0,02% −0,12% −0,03% 0,04%
Tabela 15 - Comparação de resultados usando os esquemas “all 𝑦+” e “low 𝑦+” para a resolução da camada limite
3.4.3 Análise da previsão da transição laminar-turbulento
Por se verificar uma extensa região de gradiente de pressão favorável no casco e os componentes terem um
número de Reynolds na ordem de 105, faz sentido avaliar a qualidade dos resultados face à previsão da transição
laminar-turbulento. Para tal, analisou-se a sensibilidade dos resultados obtidos com a utilização adicional do modelo
de previsão da transição laminar-turbulento, 𝛾 − 𝑅𝑒𝜃, descrito no capítulo 2.2.1 Modelo de previsão de transição
laminar turbulento 𝛄 − 𝐑𝐞𝛉. Conforme referido em [23], a utilização do modelo exige, como boa prática, uma
resolução “normal” da malha de superfície para a obtenção de melhores resultados e, adicionalmente, valores de 𝑦+
entre 0,01 e 1, poderão conferir maior aproximação em relação a resultados experimentais.
A aplicação do modelo no STAR-CCM+ requer a definição da localização da linha do escoamento livre (free
stream edge) através de uma correlação definida pelo utilizador que tome o valor 0 na camada limite e 1 no
escoamento livre. Uma técnica usual de definir esta linha é através de uma distância à parede [14], com base, por
exemplo, na espessura máxima da camada limite. Para a estimativa desta espessura máxima, considera-se a
aproximação a um escoamento sobre uma placa plana de comprimento 𝐿𝑟𝑒𝑓 = 7 𝑚, em regime turbulento e com
uma descrição do perfil de velocidades tipo potência de expoente 1/7, que permite calcular a espessura da camada
limite com a equação (47)
𝛿
𝑥= 0,37𝑅𝑒𝑥
−15⁄ (47)

45
A equação (47) é apenas válida na gama de números de Reynolds entre 5 × 105 a 107, sendo que o maior
Reynolds do problema em estudo é 𝑅𝑒 = 3,03 × 107. Assim, nestas condições, e reconhecendo o possível erro
associado devido ao limite de validade da equação, obtém-se 𝛿𝐿 = 0,083 𝑚. Com base nesta estimativa definiu-se
uma distância à parede de 0,09 𝑚, garantindo assim que a espessura da camada limite estimada é, em toda a
superfície do catamaran, menor que este valor. Este cálculo teve como base o número de Reynolds da embarcação
(com 𝐿 = 7 𝑚) pelo que também satisfaz as camadas limites dos restantes componentes (com comprimentos
inferiores a 1 𝑚).
A tabela 16 apresenta a comparação dos resultados obtidos com a utilização do modelo 𝛾 − 𝑅𝑒𝜃, onde não
se verificam variações significativas nas forças em Y e Z. Por outro lado, o resultado da força de resistência e do
momento obtido com o modelo 𝛾 − 𝑅𝑒𝜃 apresentam variações de 11,7% e 19,42% relativamente ao caso inicial
(note-se que o valor do momento em 𝑌 é diretamente afetado pelas forças em 𝑋 e 𝑍).
Modelo de transição Fx Fy Fz
Caso inicial -2,42E+02 N 1,63E+03 N 4,37E+02 N
𝛾 − 𝑅𝑒𝜃 11,70% 4,41% 4,84%
Tabela 16 - Comparação dos resultados obtidos com a utilização do modelo de transição laminar-turbulento 𝛾 − 𝑅𝑒𝜃
A tabela 17 apresenta o detalhe da variação dos resultados por componente do catamaran. As variações
verificadas no casco são diminutas uma vez que a extensão laminar, caracterizada por menores coeficientes de
fricção, representa apenas ~2% do comprimento do casco (admitindo que a transição ocorre 𝑅𝑒 = 5 × 105, valor
típico a gradiente de pressão nulo7), reduzindo, por conseguinte, o impacto na resistência total.
Por outro lado, o daggerboard, rudder e winglets apresentam significativamente menores valores de força
de resistência devido ao facto do número de Reynolds destes componentes ser na ordem do Reynolds de transição
(𝑅𝑒𝐷𝐵 = 9,73 × 105, 𝑅𝑒𝑅𝐷 = 7,83 × 105 e 𝑅𝑒𝑊𝐿 = 3,29 × 105, respetivamente) e, portanto, a existência de uma
maior extensão laminar. Porém, o impacto global das variações de cada componente é atenuado devido à ordem
grandeza superior da força de resistência do casco.
Fx Fy Fz
C. inicial 𝜸 − 𝑹𝒆𝜽 C. inicial 𝜸 − 𝑹𝒆𝜽 C. inicial 𝜸 − 𝑹𝒆𝜽
Daggerboard -7,18E+01 N −23,95% 1,45E+03 N −4,51% 7,75E+02 N −4,05%
Casco -1,55E+02 N −2,57% 2,36E+02 N −4,79% -3,97E+02 N 1,51%
Rudder -1,16E+01 N −52,39% -5,07E+01 N 9,98% 5,20E+00 N 10,99%
Winglet -3,52E+00 N −30,51% -4,82E+00 N −6,68% 5,41E+01 N 6,77%
Total -2,42E+02 N −11,70% 1,63E+03 N −4,41% 4,37E+02 N −4,84% Tabela 17 - Detalhe por componentes da comparação dos resultados obtidos com a utilização do modelo de transição laminar-
turbulento 𝛾 − 𝑅𝑒𝜃
7 Apesar de o gradiente de pressão favorável verificado no casco atrasar a transição, a localização da mesma não se altera substancialmente. Adicionalmente, os valores de 𝑦+ ≫ 1 verificados no bordo de ataque dos componentes (valores difíceis de corrigir) poderão conduzir a uma antecipação da região de transição [18].
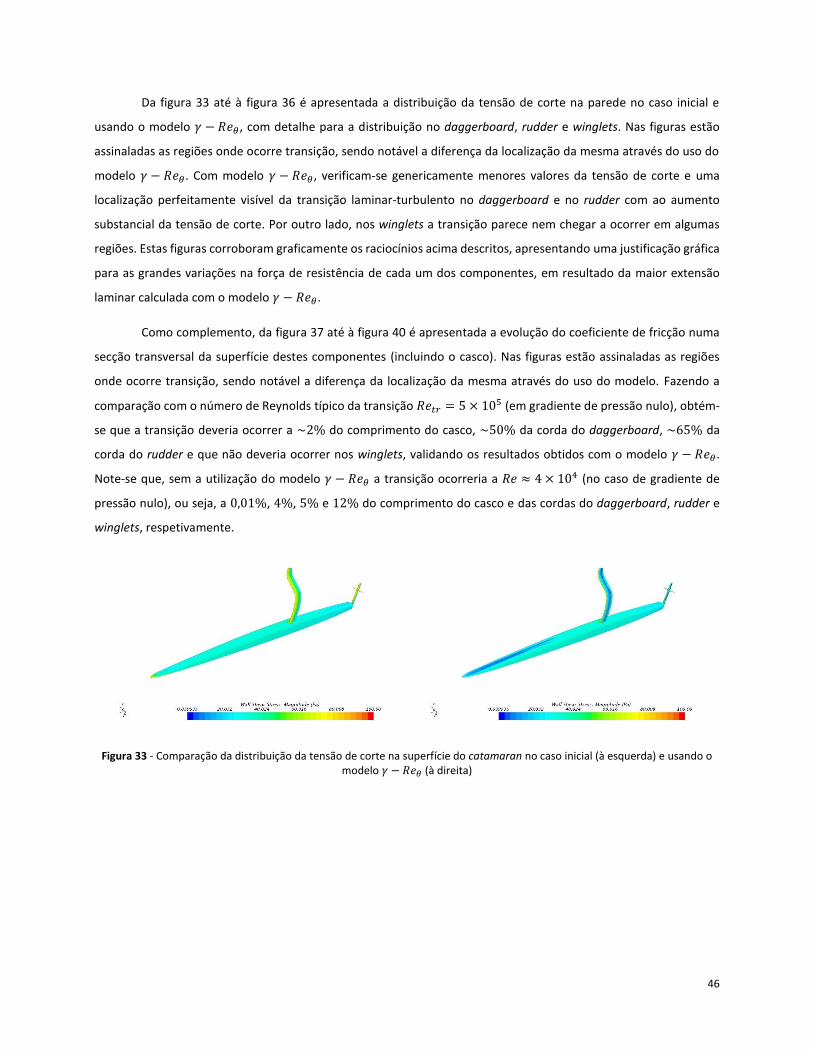
46
Da figura 33 até à figura 36 é apresentada a distribuição da tensão de corte na parede no caso inicial e
usando o modelo 𝛾 − 𝑅𝑒𝜃, com detalhe para a distribuição no daggerboard, rudder e winglets. Nas figuras estão
assinaladas as regiões onde ocorre transição, sendo notável a diferença da localização da mesma através do uso do
modelo 𝛾 − 𝑅𝑒𝜃. Com modelo 𝛾 − 𝑅𝑒𝜃, verificam-se genericamente menores valores da tensão de corte e uma
localização perfeitamente visível da transição laminar-turbulento no daggerboard e no rudder com ao aumento
substancial da tensão de corte. Por outro lado, nos winglets a transição parece nem chegar a ocorrer em algumas
regiões. Estas figuras corroboram graficamente os raciocínios acima descritos, apresentando uma justificação gráfica
para as grandes variações na força de resistência de cada um dos componentes, em resultado da maior extensão
laminar calculada com o modelo 𝛾 − 𝑅𝑒𝜃.
Como complemento, da figura 37 até à figura 40 é apresentada a evolução do coeficiente de fricção numa
secção transversal da superfície destes componentes (incluindo o casco). Nas figuras estão assinaladas as regiões
onde ocorre transição, sendo notável a diferença da localização da mesma através do uso do modelo. Fazendo a
comparação com o número de Reynolds típico da transição 𝑅𝑒𝑡𝑟 = 5 × 105 (em gradiente de pressão nulo), obtém-
se que a transição deveria ocorrer a ~2% do comprimento do casco, ~50% da corda do daggerboard, ~65% da
corda do rudder e que não deveria ocorrer nos winglets, validando os resultados obtidos com o modelo 𝛾 − 𝑅𝑒𝜃.
Note-se que, sem a utilização do modelo 𝛾 − 𝑅𝑒𝜃 a transição ocorreria a 𝑅𝑒 ≈ 4 × 104 (no caso de gradiente de
pressão nulo), ou seja, a 0,01%, 4%, 5% e 12% do comprimento do casco e das cordas do daggerboard, rudder e
winglets, respetivamente.
Figura 33 - Comparação da distribuição da tensão de corte na superfície do catamaran no caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita)
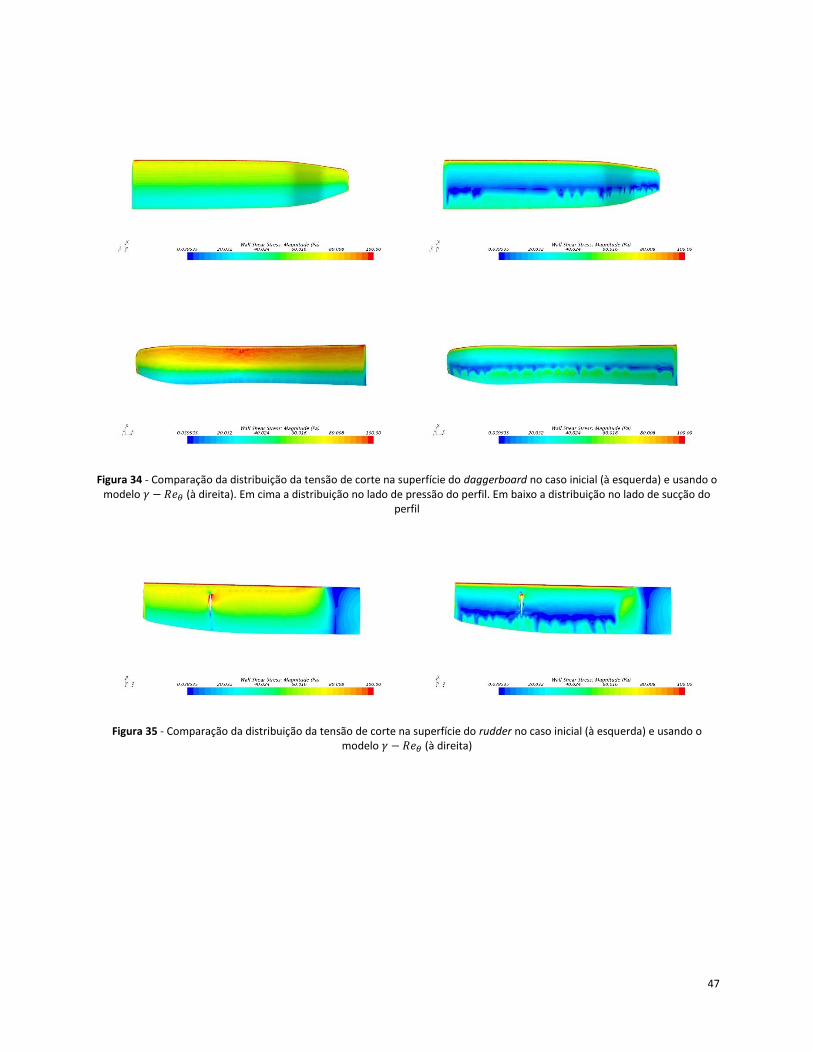
47
Figura 34 - Comparação da distribuição da tensão de corte na superfície do daggerboard no caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita). Em cima a distribuição no lado de pressão do perfil. Em baixo a distribuição no lado de sucção do
perfil
Figura 35 - Comparação da distribuição da tensão de corte na superfície do rudder no caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita)
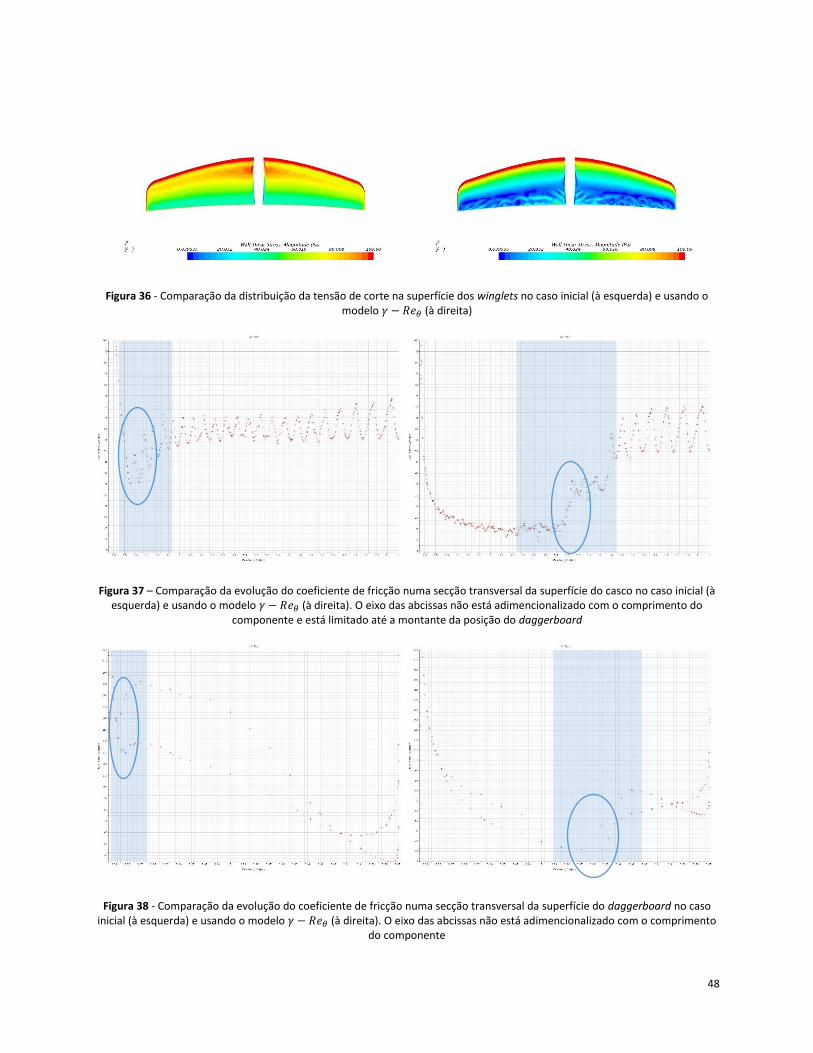
48
Figura 36 - Comparação da distribuição da tensão de corte na superfície dos winglets no caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita)
Figura 37 – Comparação da evolução do coeficiente de fricção numa secção transversal da superfície do casco no caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita). O eixo das abcissas não está adimencionalizado com o comprimento do
componente e está limitado até a montante da posição do daggerboard
Figura 38 - Comparação da evolução do coeficiente de fricção numa secção transversal da superfície do daggerboard no caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita). O eixo das abcissas não está adimencionalizado com o comprimento
do componente
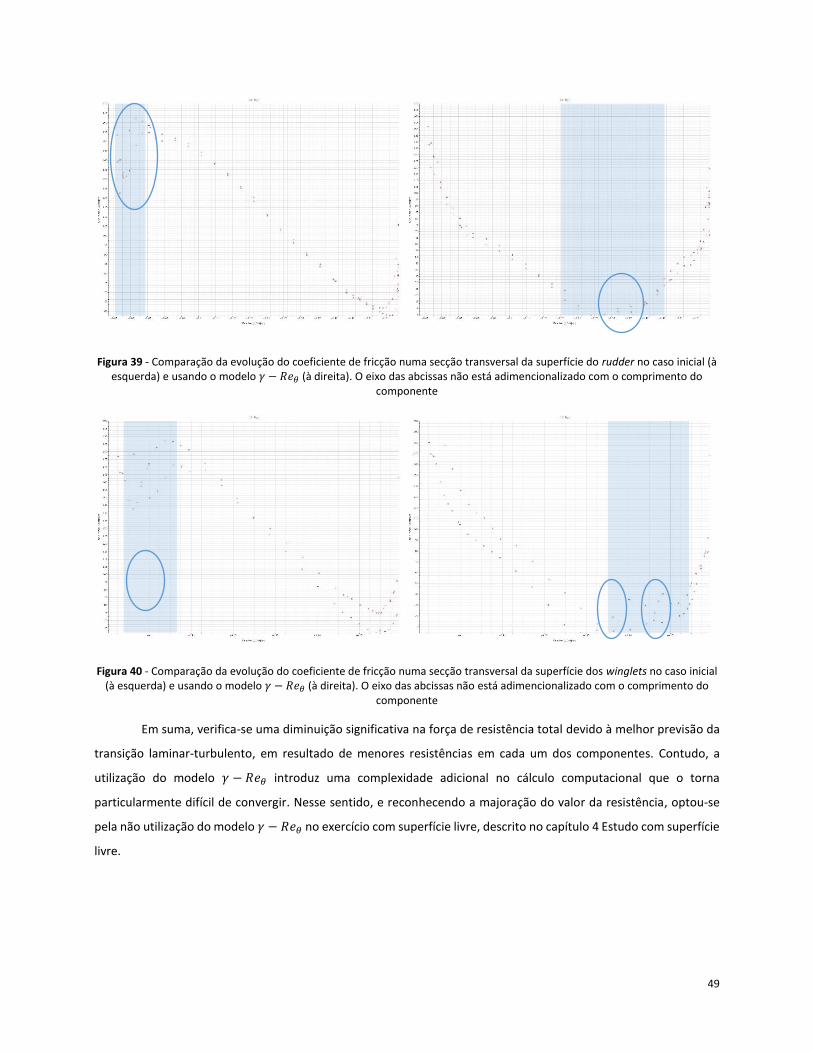
49
Figura 39 - Comparação da evolução do coeficiente de fricção numa secção transversal da superfície do rudder no caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita). O eixo das abcissas não está adimencionalizado com o comprimento do
componente
Figura 40 - Comparação da evolução do coeficiente de fricção numa secção transversal da superfície dos winglets no caso inicial (à esquerda) e usando o modelo 𝛾 − 𝑅𝑒𝜃 (à direita). O eixo das abcissas não está adimencionalizado com o comprimento do
componente
Em suma, verifica-se uma diminuição significativa na força de resistência total devido à melhor previsão da
transição laminar-turbulento, em resultado de menores resistências em cada um dos componentes. Contudo, a
utilização do modelo 𝛾 − 𝑅𝑒𝜃 introduz uma complexidade adicional no cálculo computacional que o torna
particularmente difícil de convergir. Nesse sentido, e reconhecendo a majoração do valor da resistência, optou-se
pela não utilização do modelo 𝛾 − 𝑅𝑒𝜃 no exercício com superfície livre, descrito no capítulo 4 Estudo com superfície
livre.

50
3.4.4 Análise aos parâmetros de turbulência
Por não existirem dados anteriores, numéricos ou experimentais, relativamente ao problema em estudo, a
escolha da intensidade de turbulência (𝐼) e o rácio de viscosidade turbulenta (𝛽) teve apenas por base dados da
literatura usados em análises hidrodinâmicas de embarcações em águas calmas. Efetuaram-se análises para perceber
a sensibilidade dos resultados a estes parâmetros, variando 𝐼 e 𝛽 com razões de ½ nas condições iniciais e nas
fronteiras “Inlet” e “Outlet”. A tabela 18 apresenta a comparação dos resultados obtidos com a solução inicial, onde
não se verificam variações significativas nos resultados.
Parâmetro 𝑰 𝜷 Fx Fy Fz
Caso inicial 10 0,01 -2,42E+02 N 1,63E+03 N 4,37E+02 N
Intensidade de turbulência
20 0,01 −0,02% 0,13% 0,05%
5 0,01 0,04% 0,12% 0,04%
Rácio de viscosidade turbulenta
10 0,02 0,02% 0,12% 0,04%
10 0,005 0,01% 0,12% 0,04%
Tabela 18 – Sensibilidade dos resultados à variação dos parâmetros de turbulência
3.4.5 Análise ao domínio do modelo computacional
O domínio computacional do modelo em análise tem como dimensões 10 × 10 × 5 comprimentos de
referência (comprimento, largura e altura, respetivamente). Efetuaram-se análises individuais de variação de cada
uma das dimensões do domínio, considerando uma razão de refinamento de ½ em relação ao à dimensão de
referência. A tabela 19, tabela 20 e tabela 21 apresentam a comparação dos resultados de referência com os
resultados obtidos com a variação das dimensões do domínio, onde não se verificam variações significativas nos
resultados, conforme expectável uma vez que o catamaran tem uma influência muito reduzida no escoamento
exterior, concluindo-se algum conservadorismo na escolha do domínio computacional. Contudo, decidiu-se manter
esta opção nos cálculos com superfície livre, visando atenuar potenciais efeitos das fronteiras do domínio na reflexão
das ondas.
Comprimento Fx Fy Fz
L -2,42E+02 N 1,63E+03 N 4,37E+02 N
L/2 0,04% 0,10% 0,05%
L/4 −0,07% 0,08% −0,08%
Tabela 19 - Influência da variação do comprimento (L) do domínio computacional nos resultados da simulação inicial

51
Altura Fx Fy Fz
H -2,42E+02 N 1,63E+03 N 4,37E+02 N
H/2 −0,05% 0,14% 0,09%
H/4 −0,01% −0,01% 0,21%
Tabela 20 - Influência da variação da altura (H) do domínio computacional nos resultados da simulação inicial
Largura Fx Fy Fz
W -2,42E+02 N 1,63E+03 N 4,37E+02 N
W/2 −0,03% 0,14% 0,17%
W/4 −0,01% 0,06% 0,29%
Tabela 21 - Influência da variação da largura (W) do domínio computacional nos resultados da simulação inicial
3.4.6 Análise à tipologia da malha
Conforme referido, foram definidas regiões de refinamento que envolvem a esteira dos componentes e a
esteira do casco. Efetuaram-se análises para perceber a relevância destas regiões através da simulação de um caso
sem qualquer região de refinamento e de um outro caso em que se definiu o dobro do comprimento para cada uma
das regiões cónicas. A tabela 22 apresenta os resultados comparativos entre os casos apresentados, onde se
verificam variações desprezáveis nos resultados obtidos. A tipologia sem regiões de refinamento será adotada na
construção do modelo computacional apresentado no capítulo 4 Estudo com superfície livre, uma vez que permite
uma poupança de ~30% (𝑁𝑖𝑛𝑖𝑐𝑖𝑎𝑙 = 1,03 × 107 e 𝑁𝑠/ 𝑟𝑒𝑔𝑖õ𝑒𝑠 = 7,22 × 106) no número de elementos de malha.
Tipologia Fx Fy Fz
Caso inicial -2,42E+02 N 1,63E+03 N 4,37E+02 N
Caso sem regiões de refinamento −0,64% 0,14% 0,70%
Caso com 2x comprimento das regiões −0,01% 0,00% 0,01%
Tabela 22 – Comparação dos resultados obtidos com várias das tipologias de malhas
52
4 ESTUDO COM SUPERFÍCIE LIVRE
4.1 OBJETIVO
A segunda fase do trabalho consiste no estudo da hidrodinâmica do catamaran considerando os efeitos de'
superfície livre. Apesar de o cálculo ser necessariamente não estacionário apenas serão avaliados os resultados uma
vez atingido o regime permanente. Os resultados serão comparados com o caso sem superfície livre do capítulo 3
Estudo sem superfície livre, de modo a avaliar o erro associado a não considerar a superfície livre. Finalmente, será
ainda repetido o mesmo cálculo para várias velocidades, obtendo a curva de resistência hidrodinâmica com o número
de Froude.
4.2 PRÉ-PROCESSAMENTO
4.2.1 Geometria
Para a simulação hidrodinâmica da embarcação considerando os efeitos da superfície livre, o modelo
computacional do catamaran em estudo é em tudo semelhante ao apresentado no capítulo anterior, porém com a
adição do volume flutuante da embarcação de modo a contabilizar os efeitos do escoamento ar. A figura 41 ilustra a
geometria (porção flutuante e submersa a resolver), composta pelo casco (hull) e pelos apêndices (rudder, winglets8
e daggerboard).
8 Os winglets são apêndices hidrodinâmicos adicionados posteriormente ao protótipo apresentado na figura 5

53
Figura 41 - Geometria do catamaran para o estudo com superfície livre
O catamaran está envolvido num domínio paralelepipédico cujas fronteiras se se designaram por:
Inlet: fronteira a montante, com prescrição de velocidade de entrada do escoamento no domínio;
Outlet: fronteira a jusante, com prescrição de pressão de saída do escoamento no domínio;
SlipWalls: fronteiras laterais e inferior, do tipo parede com escorregamento;
SymmPlane: fronteira de topo, do tipo plano de simetria do domínio;
Top: fronteiras de topo, do tipo parede com escorregamento;
Bottom: fronteiras de topo, do tipo parede com escorregamento;
4.2.2 Malha
À semelhança do descrito no capítulo 3 Estudo sem superfície livre, modelo computacional foi discretizado
numa malha de superfície tipo triangular, em volumes tipo hexaedros no domínio e em prismas junto às paredes do
catamaran. Os detalhes da parametrização de cada um são apresentados nos capítulos subsequentes.
4.2.2.1 Malha de superfície
De modo a poderem efetuar-se comparações entre o estudo com e sem superfície livre, a malha de
superfície manteve-se inalterada, pelo que os detalhes da parametrização são omissos neste capítulo.
𝑋
𝑍
𝑌
Casco (hull)
Daggearboard
Rudder
Winglets

54
4.2.2.2 Camada de prismas
Em simulações com superfície livre utilizando o modelo VOF é recorrente, [24] [25] [26], a adoção de uma
altura da primeira célula mais elevada nas paredes que intercetam a superfície livre, tipicamente de modo a obter
𝑦(1)+ > 30, conseguindo-se uma melhor convergência dos resultados9. Nesse sentido, em toda a superfície do casco
e na porção do rudder onde existe variação da fração de volume de água, definiu-se a camada de prismas de modo
a obter 30 < 𝑦(1)+ < 300 e garantir, portanto, o uso das leis da parede. Nas restantes superfícies, a camada de
prismas foi definida com os parâmetros descritos no capítulo 3 Estudo sem superfície livre.
Recorrendo às equações (43) a (46), a tabela 23 apresenta os parâmetros definidos para a camada de
prismas.
Parâmetro Casco Rudder (porção não submersa) Daggerboard, rudder e winglets
Número de camadas 13 6 20
Taxa de crescimento 1,148 1 1,27
Altura total da camada de prismas 0,08271 m 0,00476 m 3,00 E-03 m Tabela 23 - Parâmetros definidos para a camada de prismas
A figura 42 apresenta a distribuição de 𝑦+na superfície do catamaran calculada na simulação de referência
que será apresentada no capítulo 4.3.1 Resultados iniciais. Através da figura, é possível verificar que o casco e a
porção não submersa do rudder apresentam valores de 𝑦+ no intervalo 30 < 𝑦+ < 300, conforme desejado.
Contudo, a transição de água para ar origina uma redução dos valores de 𝑦+ devido à variação de uma ordem de
grandeza do número de Reynolds entre os dois fluidos. Por último, conforme também verificado na construção da
malha do cálculo sem superfície livre, a resolução da malha de prismas no daggerboard, rudder e winglets é suficiente
para cumprir 𝑦+ < 1 .
9 Simulações preliminares do problema em estudo apresentaram uma dificuldade elevada na convergência dos resultados e algumas gralhas numéricas no escoamento (p.e. a subida da água no casco e numerical ventilation), usando uma altura da primeira célula a garantir 𝑦(1)
+ < 1

55
Figura 42 - Distribuição de 𝑦+ na superfície do catamaran. Escala: [1 ; 300]
4.2.2.3 Tipologia da malha
Conforme concluído no capítulo 3.4.6 Análise à tipologia da malha, a utilização das regiões cónicas de
refinamento não tem influência na qualidade dos resultados e permitem a poupança de um número significativo de
elementos da malha, pelo que não foram utilizados.
Por outro lado, as boas práticas de cálculos de superfície livre recorrendo a métodos de surface tracking
recomendam uma discretização mais fina em todo o domínio junto à superfície livre e de tamanho suficiente para
envolver o sistema de ondas com uma margem de 10% da amplitude do sistema [15]. Nesse sentido, conforme
ilustrado na figura 43, definiu-se uma região de refinamento mais esparsa junto à superfície livre com extensão da
dimensão do domínio e uma região de refinamento mais fina junto à superfície a envolver toda a região definida pela
cunha de Kelvin. Adicionalmente, foi definida uma outra região de refinamento fina para descrever a onda provocada
pelo transom stern, apresentado no capítulo 2.4 Sistema de ondas.

56
Figura 43 - Regiões de refinamento para caracterização da superfície livre. Vista lateral em cima, vista de topo em baixo
As práticas de referência descritas no manual do programa STAR-CCM+ [15] sugerem as seguintes
dimensões para os elementos da malha nas regiões de refinamento da superfície livre
Dimensão em X e Y:
𝑑𝑋 = 𝑑𝑌 =𝜆
𝑛 , com 𝑛 ∈ [80 , 100] (48)
Dimensão em Z:
𝑑𝑍 =𝜉
𝑚 , com 𝑚 ∈ [20 , 40] (49)
No presente trabalho, admitiu-se 𝑛 = 80 𝑚 = 20. Recorrendo às equações (26) a (30) obtém-se, o equações (50) a
(52), comprimento de onda 𝜆, a amplitude do sistema de ondas 𝜉0 e a amplitude da onda do transom 𝜉𝑡,
considerando os parâmetros da tabela 24. A figura 44 ilustra a medição de 𝑆 e 𝐷.
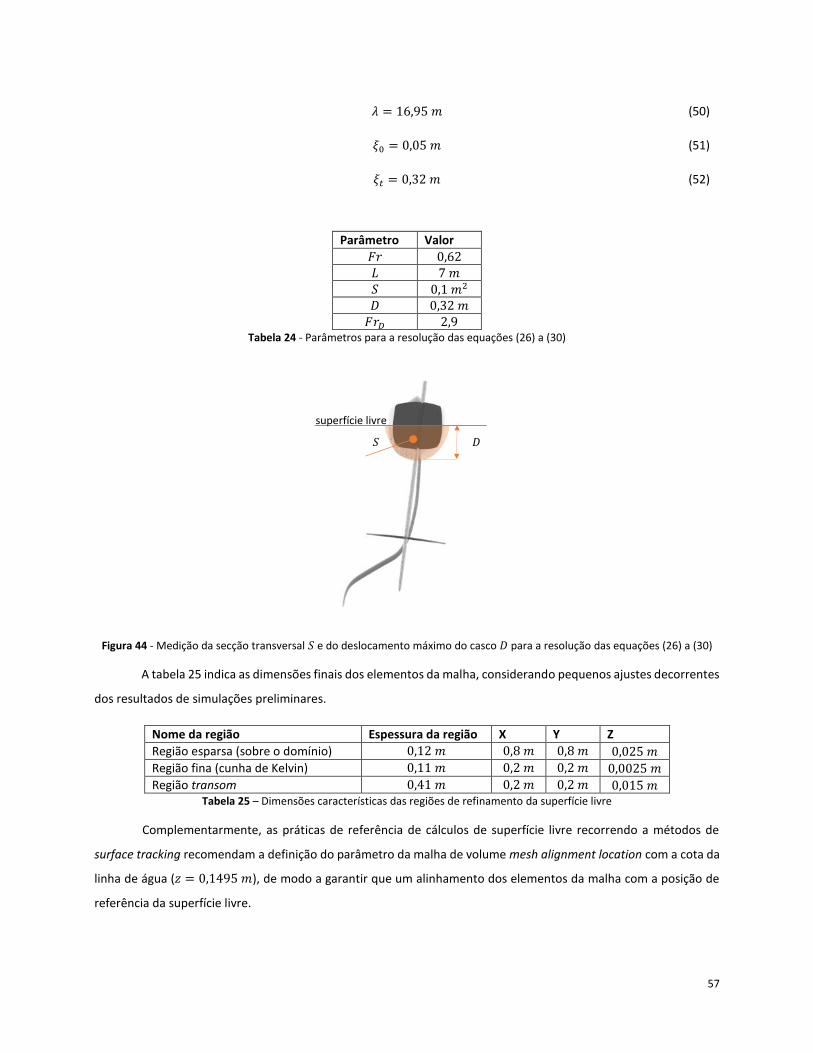
57
𝜆 = 16,95 𝑚 (50)
𝜉0 = 0,05 𝑚 (51)
𝜉𝑡 = 0,32 𝑚 (52)
Parâmetro Valor
𝐹𝑟 0,62 𝐿 7 𝑚 𝑆 0,1 𝑚2 𝐷 0,32 𝑚
𝐹𝑟𝐷 2,9 Tabela 24 - Parâmetros para a resolução das equações (26) a (30)
Figura 44 - Medição da secção transversal 𝑆 e do deslocamento máximo do casco 𝐷 para a resolução das equações (26) a (30)
A tabela 25 indica as dimensões finais dos elementos da malha, considerando pequenos ajustes decorrentes
dos resultados de simulações preliminares.
Nome da região Espessura da região X Y Z
Região esparsa (sobre o domínio) 0,12 𝑚 0,8 𝑚 0,8 𝑚 0,025 𝑚 Região fina (cunha de Kelvin) 0,11 𝑚 0,2 𝑚 0,2 𝑚 0,0025 𝑚 Região transom 0,41 𝑚 0,2 𝑚 0,2 𝑚 0,015 𝑚
Tabela 25 – Dimensões características das regiões de refinamento da superfície livre
Complementarmente, as práticas de referência de cálculos de superfície livre recorrendo a métodos de
surface tracking recomendam a definição do parâmetro da malha de volume mesh alignment location com a cota da
linha de água (𝑧 = 0,1495 𝑚), de modo a garantir que um alinhamento dos elementos da malha com a posição de
referência da superfície livre.
superfície livre
𝑆 𝐷

58
4.2.2.4 Domínio computacional
O domínio computacional é similar ao apresentado no capítulo 3 Estudo sem superfície livre. Com a
necessidade de simulação do escoamento ar no volume flutuante da embarcação, o domínio computacional estende-
se 1 𝐿𝑟𝑒𝑓 acima da linha de água de referência. A tabela 26 apresenta as dimensões definidas para o domínio do
modelo computacional. A altura e largura são medidas relativamente à origem. O comprimento considera 1,5 𝐿𝑟𝑒𝑓
para a vante da proa do casco e 7,5 𝐿𝑟𝑒𝑓 a ré da popa do casco.
Dimensão Valor
Comprimento 10 𝐿𝑟𝑒𝑓
Largura 10 𝐿𝑟𝑒𝑓
Altura (volume submerso) 5 𝐿𝑟𝑒𝑓
Altura (volume flutuante) 1 𝐿𝑟𝑒𝑓
Tabela 26 - Dimensões do domínio computacional
Figura 45 - Dimensões do domínio computacional
4.2.3 Modelos físicos
O cálculo foi efetuado no programa STAR-CCM +, recorrendo ao modelo de turbulência 𝑘-𝜔 SST para o
cálculo das RANSE (Reynolds Average Navier-Stokes Equations), utilizando um esquema de resolução da camada
limite “all 𝑦+ wall treatment”. Este esquema híbrido faz a ponderação local para o cálculo da tensão de corte na
parede, através da lei da parede (𝑦+ > 30) ou resolvendo a camada limite até à parede (𝑦+ → 0).
10 𝐿
5 𝐿
10 𝐿
1 𝐿

59
Para a resolução da superfície livre foi utilizado o modelo Volume of Fluid (VOF), recorrendo ao esquema de
primeira ordem implicit unsteady solver do STAR-CCM+. As práticas de referência de simulações usando o modelo
VOF recomendam a utilização da equação (53) para a definição do time-step Δ𝑡 da discretização temporal.
Δ𝑡 =𝑃
2,4 × 𝑛 (53)
onde 𝑃 representa o período da onda e 𝑛 é o parâmetro usado na equação (48). O período 𝑃 do sistema de onda
pode ser estimado recorrendo às equações (32) a (34), de onde se obtém:
𝑘 = 0,37 𝑚−1 (54)
𝜔 = 1,91 𝑟𝑎𝑑/𝑠 (55)
𝑃 = 0,52 𝑠 (56)
Δ𝑡 = 0,0027 𝑠 (57)
Como o resultado de interesse da simulação é a solução em regime estacionário, não sendo relevante o
regime transiente do cálculo, é importante que a superfície livre seja resolvida recorrendo ao esquema HRIC de modo
a que se obtenha uma interface fina com transições bruscas entre fluidos (em 3 a 5 células). Para tal, conforme
descrito em 2.3 Superfície livre, o número de Courant inferior e superior (𝐶𝐹𝐿𝑙 e 𝐶𝐹𝐿𝑢, respetivamente) deverão ser
superiores ao máximo número de Courant da superfície livre. Simulações preliminares permitiram definir 𝐶𝐹𝐿𝑙 =
1 × 107 e 𝐶𝐹𝐿𝑢 = 1 × 108 de modo a satisfazer a condição descrita em qualquer momento do cálculo (inclusive no
momento de inicialização do cálculo onde que se usaram discretizações espaciais e temporais mais grosseiras). A
alteração dos parâmetros sharpening factor e angle factor não revelou influência nas simulações efetuadas, pelo que
se mantiveram as predefinidas e recomendadas pelo programa STAR-CCM+.
O cálculo de uma superfície livre implica a interação de dois fluidos e, portanto, de uma tensão de superfície
entre os dois e de um ângulo de molhamento quando em contacto com uma superfície 𝛼𝑐. Os valores definidos para
as simulações são apresentados na tabela 1.
Em simulações para aplicações navais, calculando a superfície livre com o modelo VOF, é comum verificar-
se a ocorrência de numerical ventilation, isto é, um fenómeno não físico em que se verifica a entrada de ar debaixo
do casco nas primeiras células junto à parede. Este fenómeno conduziria a resultados errados das tensões na parede
uma vez que estas seriam calculadas usando a viscosidade de uma mistura ar-água, em vez de apenas. O modelo VOF
Phase replacement (VOF PR) permite corrigir este problema numérico substituindo o ar por água nas células contidas
numa região pelo utilizador. Com base em [24] e em algumas simulações preliminares, a tabela 27 apresenta as
condições definidas para que o VOF PR seja ativado. Estas são baseadas numa posição no espaço, numa distância às
paredes do catamaran e numa fração de volume de ar mínima. Estas regiões são ilustradas na figura 46.
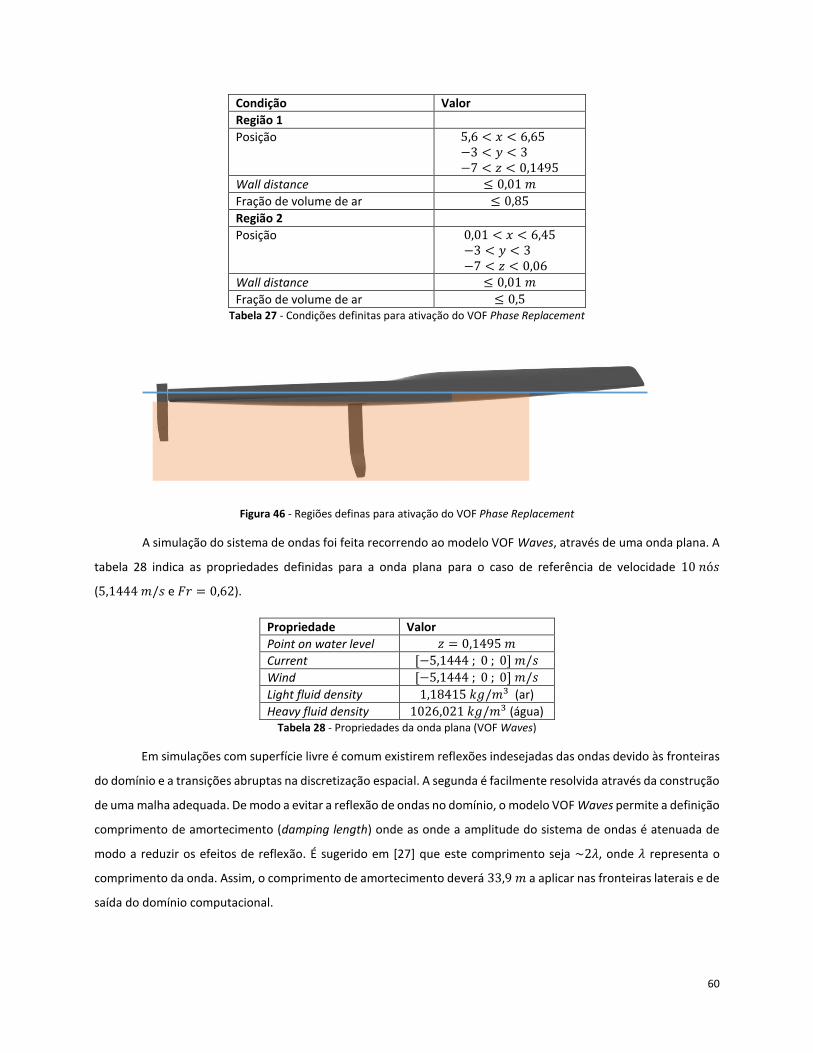
60
Condição Valor
Região 1
Posição 5,6 < 𝑥 < 6,65 −3 < 𝑦 < 3 −7 < 𝑧 < 0,1495
Wall distance ≤ 0,01 𝑚
Fração de volume de ar ≤ 0,85
Região 2
Posição 0,01 < 𝑥 < 6,45 −3 < 𝑦 < 3 −7 < 𝑧 < 0,06
Wall distance ≤ 0,01 𝑚
Fração de volume de ar ≤ 0,5 Tabela 27 - Condições definitas para ativação do VOF Phase Replacement
Figura 46 - Regiões definas para ativação do VOF Phase Replacement
A simulação do sistema de ondas foi feita recorrendo ao modelo VOF Waves, através de uma onda plana. A
tabela 28 indica as propriedades definidas para a onda plana para o caso de referência de velocidade 10 𝑛ó𝑠
(5,1444 𝑚/𝑠 e 𝐹𝑟 = 0,62).
Propriedade Valor
Point on water level 𝑧 = 0,1495 𝑚
Current [−5,1444 ; 0 ; 0] 𝑚/𝑠
Wind [−5,1444 ; 0 ; 0] 𝑚/𝑠
Light fluid density 1,18415 𝑘𝑔/𝑚3 (ar)
Heavy fluid density 1026,021 𝑘𝑔/𝑚3 (água) Tabela 28 - Propriedades da onda plana (VOF Waves)
Em simulações com superfície livre é comum existirem reflexões indesejadas das ondas devido às fronteiras
do domínio e a transições abruptas na discretização espacial. A segunda é facilmente resolvida através da construção
de uma malha adequada. De modo a evitar a reflexão de ondas no domínio, o modelo VOF Waves permite a definição
comprimento de amortecimento (damping length) onde as onde a amplitude do sistema de ondas é atenuada de
modo a reduzir os efeitos de reflexão. É sugerido em [27] que este comprimento seja ~2𝜆, onde 𝜆 representa o
comprimento da onda. Assim, o comprimento de amortecimento deverá 33,9 𝑚 a aplicar nas fronteiras laterais e de
saída do domínio computacional.
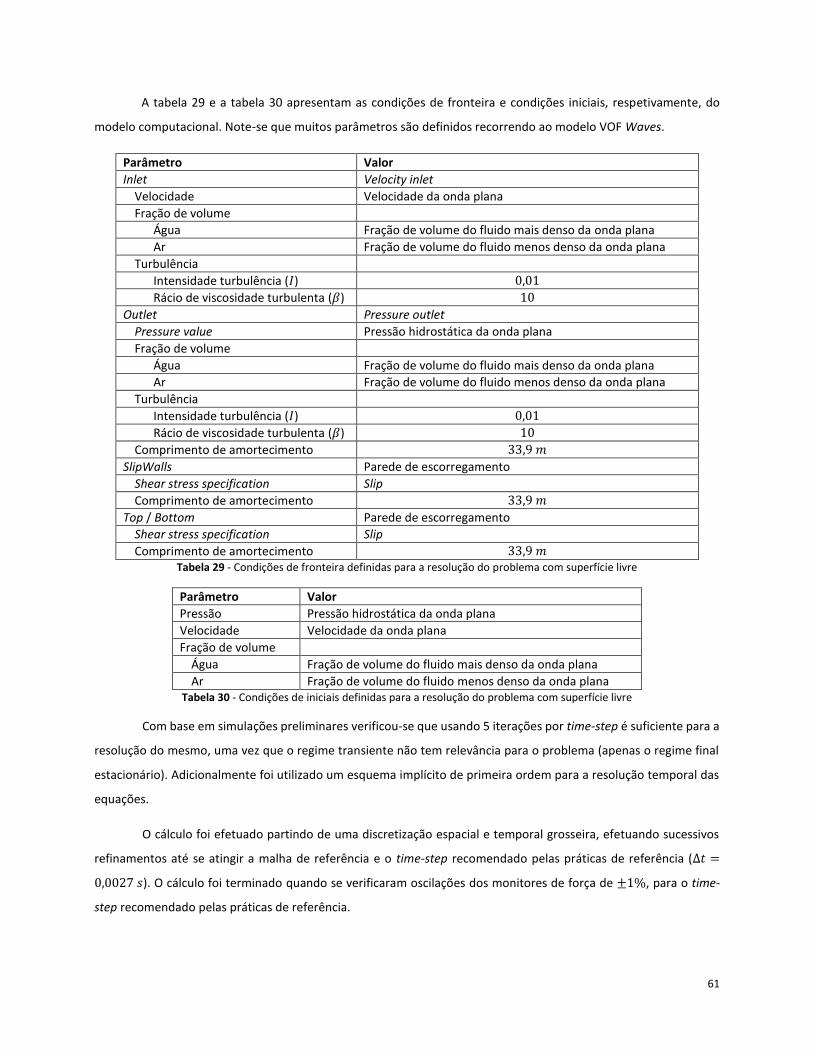
61
A tabela 29 e a tabela 30 apresentam as condições de fronteira e condições iniciais, respetivamente, do
modelo computacional. Note-se que muitos parâmetros são definidos recorrendo ao modelo VOF Waves.
Parâmetro Valor
Inlet Velocity inlet
Velocidade Velocidade da onda plana
Fração de volume
Água Fração de volume do fluido mais denso da onda plana
Ar Fração de volume do fluido menos denso da onda plana
Turbulência
Intensidade turbulência (𝐼) 0,01
Rácio de viscosidade turbulenta (𝛽) 10
Outlet Pressure outlet
Pressure value Pressão hidrostática da onda plana
Fração de volume
Água Fração de volume do fluido mais denso da onda plana
Ar Fração de volume do fluido menos denso da onda plana
Turbulência
Intensidade turbulência (𝐼) 0,01
Rácio de viscosidade turbulenta (𝛽) 10
Comprimento de amortecimento 33,9 𝑚
SlipWalls Parede de escorregamento
Shear stress specification Slip
Comprimento de amortecimento 33,9 𝑚
Top / Bottom Parede de escorregamento
Shear stress specification Slip
Comprimento de amortecimento 33,9 𝑚 Tabela 29 - Condições de fronteira definidas para a resolução do problema com superfície livre
Parâmetro Valor
Pressão Pressão hidrostática da onda plana
Velocidade Velocidade da onda plana
Fração de volume
Água Fração de volume do fluido mais denso da onda plana
Ar Fração de volume do fluido menos denso da onda plana Tabela 30 - Condições de iniciais definidas para a resolução do problema com superfície livre
Com base em simulações preliminares verificou-se que usando 5 iterações por time-step é suficiente para a
resolução do mesmo, uma vez que o regime transiente não tem relevância para o problema (apenas o regime final
estacionário). Adicionalmente foi utilizado um esquema implícito de primeira ordem para a resolução temporal das
equações.
O cálculo foi efetuado partindo de uma discretização espacial e temporal grosseira, efetuando sucessivos
refinamentos até se atingir a malha de referência e o time-step recomendado pelas práticas de referência (Δ𝑡 =
0,0027 𝑠). O cálculo foi terminado quando se verificaram oscilações dos monitores de força de ±1%, para o time-
step recomendado pelas práticas de referência.
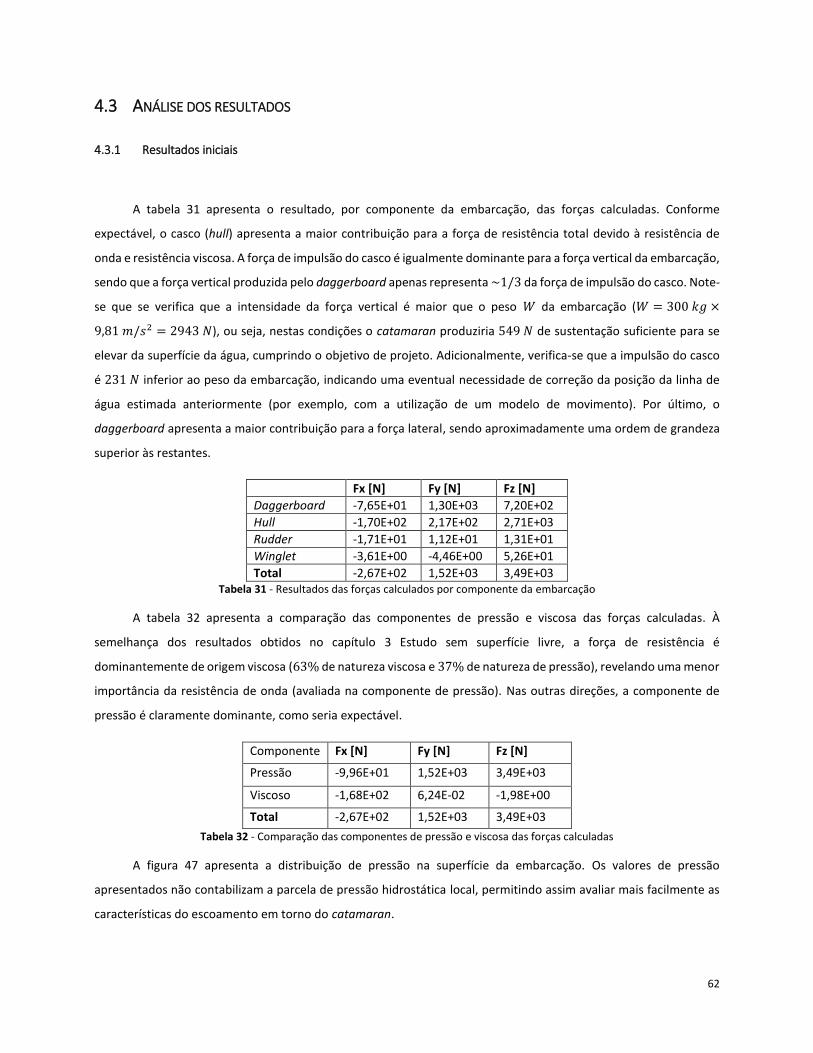
62
4.3 ANÁLISE DOS RESULTADOS
4.3.1 Resultados iniciais
A tabela 31 apresenta o resultado, por componente da embarcação, das forças calculadas. Conforme
expectável, o casco (hull) apresenta a maior contribuição para a força de resistência total devido à resistência de
onda e resistência viscosa. A força de impulsão do casco é igualmente dominante para a força vertical da embarcação,
sendo que a força vertical produzida pelo daggerboard apenas representa ~1/3 da força de impulsão do casco. Note-
se que se verifica que a intensidade da força vertical é maior que o peso 𝑊 da embarcação (𝑊 = 300 𝑘𝑔 ×
9,81 𝑚/𝑠2 = 2943 𝑁), ou seja, nestas condições o catamaran produziria 549 𝑁 de sustentação suficiente para se
elevar da superfície da água, cumprindo o objetivo de projeto. Adicionalmente, verifica-se que a impulsão do casco
é 231 𝑁 inferior ao peso da embarcação, indicando uma eventual necessidade de correção da posição da linha de
água estimada anteriormente (por exemplo, com a utilização de um modelo de movimento). Por último, o
daggerboard apresenta a maior contribuição para a força lateral, sendo aproximadamente uma ordem de grandeza
superior às restantes.
Fx [N] Fy [N] Fz [N]
Daggerboard -7,65E+01 1,30E+03 7,20E+02
Hull -1,70E+02 2,17E+02 2,71E+03
Rudder -1,71E+01 1,12E+01 1,31E+01
Winglet -3,61E+00 -4,46E+00 5,26E+01
Total -2,67E+02 1,52E+03 3,49E+03 Tabela 31 - Resultados das forças calculados por componente da embarcação
A tabela 32 apresenta a comparação das componentes de pressão e viscosa das forças calculadas. À
semelhança dos resultados obtidos no capítulo 3 Estudo sem superfície livre, a força de resistência é
dominantemente de origem viscosa (63% de natureza viscosa e 37% de natureza de pressão), revelando uma menor
importância da resistência de onda (avaliada na componente de pressão). Nas outras direções, a componente de
pressão é claramente dominante, como seria expectável.
Componente Fx [N] Fy [N] Fz [N]
Pressão -9,96E+01 1,52E+03 3,49E+03
Viscoso -1,68E+02 6,24E-02 -1,98E+00
Total -2,67E+02 1,52E+03 3,49E+03
Tabela 32 - Comparação das componentes de pressão e viscosa das forças calculadas
A figura 47 apresenta a distribuição de pressão na superfície da embarcação. Os valores de pressão
apresentados não contabilizam a parcela de pressão hidrostática local, permitindo assim avaliar mais facilmente as
características do escoamento em torno do catamaran.

63
Figura 47 - Distribuição da pressão na superfície do catamaran. Os valores apresentados são relativos à hidrostática local
A figura 48 apresenta a distribuição da tensão de corte na superfície da embarcação, onde se verifica que as
tensões de corte na superfície molhada são uma ordem de grandeza acima das tensões verificadas na superfície não
molhada, uma vez que o número de Reynolds da água é uma ordem de grandeza superior ao do ar.
Figura 48 - Distribuição da magnitude da tensão de corte na superfície do catamaran
A figura 49 apresenta o padrão de ondas da superfície livre. Devido ao número de Froude elevado (𝐹𝑟 =
0,62), nota-se uma clara dominância das ondas de propagação divergente, como seria expectável [5]. A figura 50
apresenta o detalhe da superfície livre na zona da popa do casco, onde é visível na onda gerada a ré da popa e o
abaixamento da cota da superfície livre nessa região, verificando-se um transom seco (dry transom). Como já

64
referido, este fenómeno conduz a que não haja separação do escoamento de água (que sai tangencialmente à
superfície) conseguindo-se, portanto, uma resistência de pressão menor do que se o fenómeno não ocorresse (por
exemplo, no caso de uma geometria da popa diferente).
Figura 49 - Padrão de ondas da superfície livre
Figura 50 - Detalhe da onda provocada pelo dry transom

65
A figura 51 apresenta a distribuição da fração de volume de água na superfície do catamaran onde se verifica
uma interface fina entre os fluidos, conforme é desejado, e onde é visível o fenómeno de transom seco na popa, já
descrito.
Figura 51 - Distribuição da fração de volume de água na superfície do catamaran
Por último, está fora de âmbito do presente trabalho a análise à discretização espacial e temporal, seguindo-
se apenas as práticas de referências sugeridas para parametrização do modelo computacional. Esta decisão conduz
a que não se obtenha a melhor resolução da superfície livre e traduz-se numa maior incerteza numérica associada
aos cálculos. Conforme já referido, a simulação foi terminada quando se verificaram oscilações dos monitores de
força de ±1%, para o time-step recomendado pelas práticas de referência. O tempo físico total de simulação (total
physical time) foi 121,642 𝑠 e obteve-se 𝐶𝐹𝐿𝑚𝑖𝑛 = 0,028 e 𝐶𝐹𝐿𝑚𝑎𝑥 = 186,2 na superfície livre. Note-se que as
praticas de referência recomendam 𝐶𝐹𝐿𝑆𝐿 < 1 na superfície livre, que apenas seria possível com mais refinamentos
adicionais à discretização temporal.
4.3.2 Comparação dos resultados com o caso sem superfície livre
É relevante efetuar a comparação dos resultados obtidos no presente capítulo com os resultados obtidos sem
superfície livre, onde apenas poderão ser expectáveis variações significativas na força de resistência contribuindo os
seguintes fatores:

66
Incremento da força de resistência total devido à resistência aerodinâmica adicional do volume
flutuante. Contudo, ao número de Reynolds do fluido ar é uma ordem de grandeza inferior ao da
água, reduzindo substancialmente o impacto esperado na resistência total;
Diminuição da força de resistência total devido ao fenómeno de dry transom. Em simulações sem
superfície livre o fenómeno não se verifica, implicando a separação do escoamento água e,
portanto, a uma resistência de pressão maior;
Incremento da força de resistência total devido à energia dissipada para o sistema de ondas –
resistência de onda. A resistência de onda é tanto maior quanto maior o número de Froude,
conforme descrito no capítulo introdutório;
Os resultados obtidos no capítulo 3 Estudo sem superfície livre, não consideram a utilização de leis da parede
para a resolução da camada limite no casco. Nesse sentido, efetuou-se uma simulação suplementar sem superfície
livre, com base na simulação de referência do capítulo 3 Estudo sem superfície livre, utilizando a parametrização de
malha descrita no presente capítulo. Complementarmente, adicionou-se a parcela de pressão de hidrostática local
aos resultados para comparação com os resultados com superfície livre do presente capítulo. Esta simulação
preliminar, cujos resultados são apresentados na tabela 33, indica um aumento de 6% na resistência total face à
simulação de referência do caso sem superfície livre, onde não são usadas leis da parede para a determinação da
tensão de corte na parede.
Fx Fy Fz
Resultado de referência sem superfície livre -2,42E+02 N 1,63E+03 N 4,37E+02 N
Caso sem superfície livre para comparação -2,56E+02 N 1,63E+03 N 3,41E+03 N
Variação dos resultados 6% 0% −679% Tabela 33 - Comparação do resultado de referência sem superfície livre com os resultados obtidos sem superfície livre
considerando a parametrização de malha com 30 < 𝑦+ < 300 e a introdução da componente de pressão hidrostática. Note-se que a variação de 679% é resultado da pressão hidrostática
A tabela 34 apresenta a comparação dos resultados dos casos com e sem superfície livre (CSL e SSL,
respetivamente) onde se verificam variações pequenas nas forças calculadas. Note-se que, ao contrário do que
poderia ser expectável, apenas se verificam variações de 4% na força de resistência sendo necessária uma análise
adicional recorrendo à tabela 35 para comparação dos resultados detalhados por componente da embarcação.
Fx Fy Fz
Sem superfície livre -2,56E+02 N 1,63E+03 N 3,41E+03 N
Com superfície livre -2,67E+02 N 1,52E+03 N 3,49E+03 N
Variação dos resultados −4% −7% 2% Tabela 34 - Comparação dos resultados obtidos com a simulação com e sem superfície livre
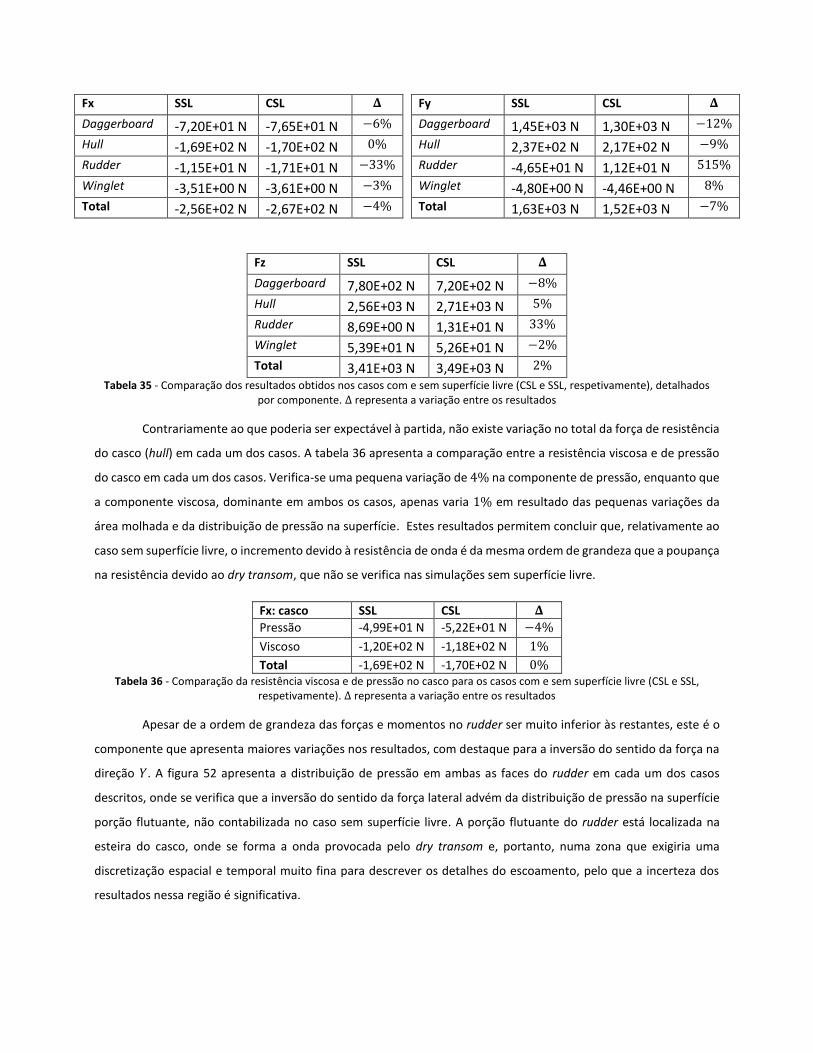
Fx SSL CSL 𝚫
Daggerboard -7,20E+01 N -7,65E+01 N −6%
Hull -1,69E+02 N -1,70E+02 N 0%
Rudder -1,15E+01 N -1,71E+01 N −33%
Winglet -3,51E+00 N -3,61E+00 N −3%
Total -2,56E+02 N -2,67E+02 N −4%
Fy SSL CSL 𝚫
Daggerboard 1,45E+03 N 1,30E+03 N −12%
Hull 2,37E+02 N 2,17E+02 N −9%
Rudder -4,65E+01 N 1,12E+01 N 515%
Winglet -4,80E+00 N -4,46E+00 N 8%
Total 1,63E+03 N 1,52E+03 N −7%
Fz SSL CSL 𝚫
Daggerboard 7,80E+02 N 7,20E+02 N −8%
Hull 2,56E+03 N 2,71E+03 N 5%
Rudder 8,69E+00 N 1,31E+01 N 33%
Winglet 5,39E+01 N 5,26E+01 N −2%
Total 3,41E+03 N 3,49E+03 N 2%
Tabela 35 - Comparação dos resultados obtidos nos casos com e sem superfície livre (CSL e SSL, respetivamente), detalhados por componente. Δ representa a variação entre os resultados
Contrariamente ao que poderia ser expectável à partida, não existe variação no total da força de resistência
do casco (hull) em cada um dos casos. A tabela 36 apresenta a comparação entre a resistência viscosa e de pressão
do casco em cada um dos casos. Verifica-se uma pequena variação de 4% na componente de pressão, enquanto que
a componente viscosa, dominante em ambos os casos, apenas varia 1% em resultado das pequenas variações da
área molhada e da distribuição de pressão na superfície. Estes resultados permitem concluir que, relativamente ao
caso sem superfície livre, o incremento devido à resistência de onda é da mesma ordem de grandeza que a poupança
na resistência devido ao dry transom, que não se verifica nas simulações sem superfície livre.
Fx: casco SSL CSL 𝚫
Pressão -4,99E+01 N -5,22E+01 N −4%
Viscoso -1,20E+02 N -1,18E+02 N 1%
Total -1,69E+02 N -1,70E+02 N 0% Tabela 36 - Comparação da resistência viscosa e de pressão no casco para os casos com e sem superfície livre (CSL e SSL,
respetivamente). Δ representa a variação entre os resultados
Apesar de a ordem de grandeza das forças e momentos no rudder ser muito inferior às restantes, este é o
componente que apresenta maiores variações nos resultados, com destaque para a inversão do sentido da força na
direção 𝑌. A figura 52 apresenta a distribuição de pressão em ambas as faces do rudder em cada um dos casos
descritos, onde se verifica que a inversão do sentido da força lateral advém da distribuição de pressão na superfície
porção flutuante, não contabilizada no caso sem superfície livre. A porção flutuante do rudder está localizada na
esteira do casco, onde se forma a onda provocada pelo dry transom e, portanto, numa zona que exigiria uma
discretização espacial e temporal muito fina para descrever os detalhes do escoamento, pelo que a incerteza dos
resultados nessa região é significativa.
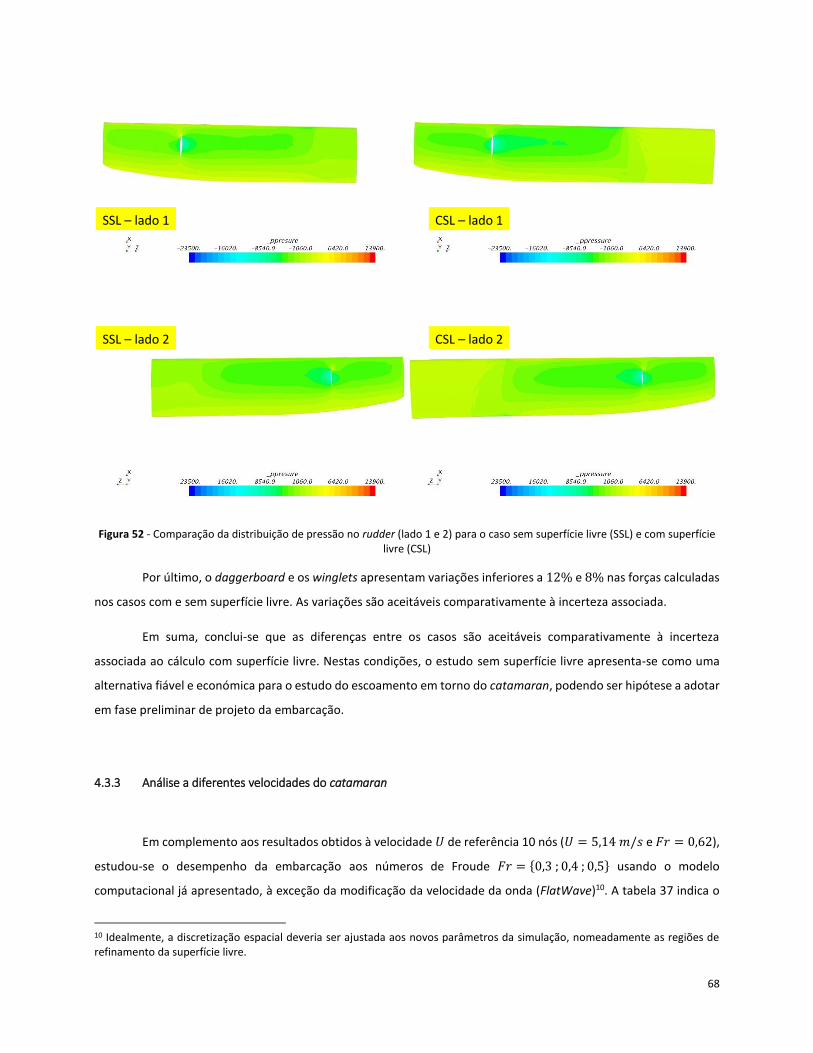
68
Figura 52 - Comparação da distribuição de pressão no rudder (lado 1 e 2) para o caso sem superfície livre (SSL) e com superfície livre (CSL)
Por último, o daggerboard e os winglets apresentam variações inferiores a 12% e 8% nas forças calculadas
nos casos com e sem superfície livre. As variações são aceitáveis comparativamente à incerteza associada.
Em suma, conclui-se que as diferenças entre os casos são aceitáveis comparativamente à incerteza
associada ao cálculo com superfície livre. Nestas condições, o estudo sem superfície livre apresenta-se como uma
alternativa fiável e económica para o estudo do escoamento em torno do catamaran, podendo ser hipótese a adotar
em fase preliminar de projeto da embarcação.
4.3.3 Análise a diferentes velocidades do catamaran
Em complemento aos resultados obtidos à velocidade 𝑈 de referência 10 nós (𝑈 = 5,14 𝑚/𝑠 e 𝐹𝑟 = 0,62),
estudou-se o desempenho da embarcação aos números de Froude 𝐹𝑟 = {0,3 ; 0,4 ; 0,5} usando o modelo
computacional já apresentado, à exceção da modificação da velocidade da onda (FlatWave)10. A tabela 37 indica o
10 Idealmente, a discretização espacial deveria ser ajustada aos novos parâmetros da simulação, nomeadamente as regiões de refinamento da superfície livre.
SSL – lado 1 CSL – lado 1
SSL – lado 2 CSL – lado 2

69
passo no tempo recomendado para cada número de Froude, o tempo total de simulação e o 𝐶𝐹𝐿𝑚𝑖𝑛 e 𝐶𝐹𝐿𝑚𝑎𝑥 .
Note-se que por limitação de recursos não foi possível atingir o time-step recomendado para 𝐹𝑟 = 0,4 e 𝐹𝑟 = 0,3,
conduzindo a valores de 𝐶𝐹𝐿 mais elevados.
Fr Time-step recomendado [s]
Time-step usado [s]
Tempo físico total [s]
𝑪𝑭𝑳𝒎𝒊𝒏 𝑪𝑭𝑳𝒎𝒂𝒙 % oscilação resultados
0,3 0,0013 0,01 165,85 0,048 193,2 ± 2%
0,4 0,0018 0,01 106,4 0,066 1402,7 ± 2%
0,5 0,0022 0,0022 194,292 0,018 747,4 ± 1%
0,62 0,0027 0,0027 121,642 0,028 186,2 ± 1% Tabela 37 - Dados das simulações a diferentes números de Froude
A tabela 38 apresenta os resultados obtidos para os números de Froude descritos, onde se verifica que a
força vertical é sempre superior ao peso da embarcação, apesar de muito próxima quando 𝐹𝑟 = 0,3, não sendo, no
entanto, possível identificar a velocidade de take-off.
Fr U [m/s] Fx [N] Fy [N] Fz [N]
0,3 2,49 -7,32E+01 3,52E+02 3,13E+03
0,4 3,31 -1,27E+02 6,29E+02 3,14E+03
0,5 4,14 -1,88E+02 9,94E+02 3,24E+03
0,62 5,14 -2,67E+02 1,52E+03 3,49E+03 Tabela 38 - Resultados de forças obtidos a diferentes números de Froude
Em problemas de escoamentos com superfície livre, é comum não ser possível obter um único coeficiente
adimensional de resistência 𝐶𝑋, equação (58), devido ao aumento significativo da resistência de onda com a
velocidade (tipicamente quando 𝐹𝑟 > 0,4 − 0,5, dependendo da geometria da embarcação).
𝐶𝑋 =𝐹𝑋
12
𝜌𝐴𝑈2 (58)
Na equação (58), 𝜌 representa a massa específica da água, 𝑈 a velocidade e 𝐴 a área de referência.
Considerou-se 𝐴 como a razão entre o volume de deslocamento ∇ (determinado no capítulo 3.2.1 Determinação da
linha de água) e o comprimento de referência 𝐿𝑟𝑒𝑓 (𝐴 = ∇/𝐿𝑟𝑒𝑓)11.
A tabela 39 apresenta os coeficientes de resistência a várias velocidades para o problema em estudo, onde
se verificam variações sucessivamente maiores, ainda que pequenas uma vez que a resistência de onda ainda não é
dominante. No caso de um aumento da velocidade, por exemplo 𝐹𝑟 = 0,8 − 1 seria expectável obter coeficientes
consideravelmente diferentes.
11 Tradicionalmente utiliza-se a área molhada como área de referência. Contudo, esta área molhada é diferente para cada
velocidade. Nestas situações é comum considerar-se 𝐴 = 𝐿𝑟𝑒𝑓3, mas que neste caso conduziria a coeficientes muito pequeno
porque 𝐿𝑟𝑒𝑓 = 7 𝑚. Como o volume de deslocamento apenas depende do peso da embarcação, que se admite correto, utilizou-
se 𝐴 = ∇/𝐿𝑟𝑒𝑓.
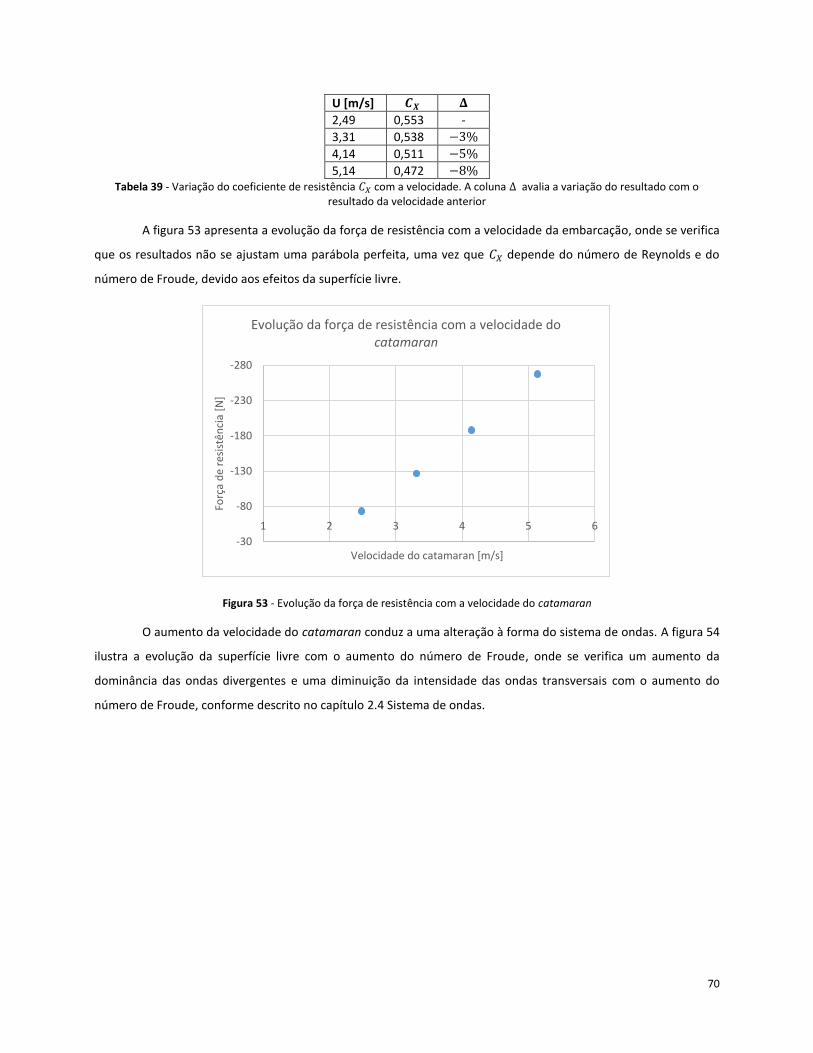
70
U [m/s] 𝑪𝑿 𝚫
2,49 0,553 -
3,31 0,538 −3%
4,14 0,511 −5%
5,14 0,472 −8% Tabela 39 - Variação do coeficiente de resistência 𝐶𝑋 com a velocidade. A coluna Δ avalia a variação do resultado com o
resultado da velocidade anterior
A figura 53 apresenta a evolução da força de resistência com a velocidade da embarcação, onde se verifica
que os resultados não se ajustam uma parábola perfeita, uma vez que 𝐶𝑋 depende do número de Reynolds e do
número de Froude, devido aos efeitos da superfície livre.
Figura 53 - Evolução da força de resistência com a velocidade do catamaran
O aumento da velocidade do catamaran conduz a uma alteração à forma do sistema de ondas. A figura 54
ilustra a evolução da superfície livre com o aumento do número de Froude, onde se verifica um aumento da
dominância das ondas divergentes e uma diminuição da intensidade das ondas transversais com o aumento do
número de Froude, conforme descrito no capítulo 2.4 Sistema de ondas.
-280
-230
-180
-130
-80
-30
1 2 3 4 5 6
Forç
a d
e re
sist
ênci
a [N
]
Velocidade do catamaran [m/s]
Evolução da força de resistência com a velocidade do catamaran
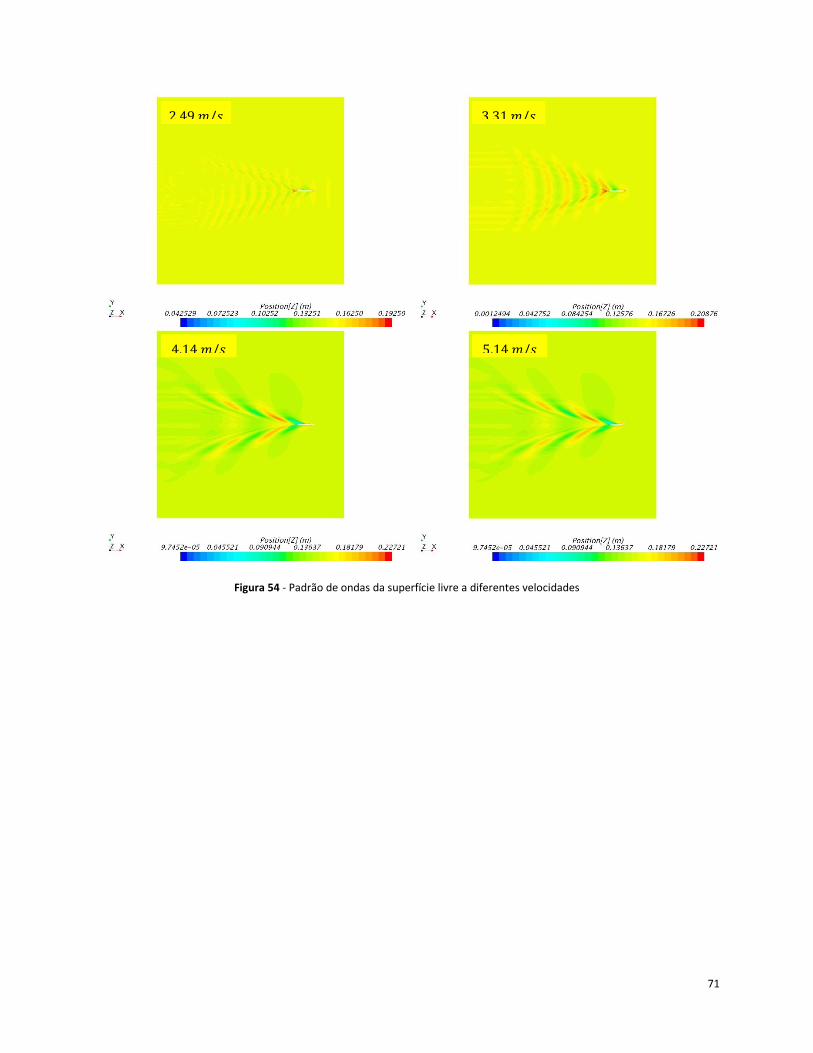
71
Figura 54 - Padrão de ondas da superfície livre a diferentes velocidades
2,49 𝑚/𝑠 3,31 𝑚/𝑠
4,14 𝑚/𝑠 5,14 𝑚/𝑠
72
5 CONCLUSÕES
O presente trabalho teve como objetivo a simulação e análise do comportamento hidrodinâmico de um
catamaran de competição classe C, visando a determinação das forças que atuam na embarcação a diferentes
velocidades, recorrendo à resolução numérica das equações de Navier-Stokes em média temporal de Reynolds.
Numa primeira fase foi analisado em regime estacionário o escoamento em torno do volume submerso da
embarcação, desprezando os efeitos da superfície livre. Seguiu-se um procedimento para a verificação dos resultados
obtidos através de sucessivos refinamentos à discretização espacial que conduziu à estimativa de uma solução exata
do problema a resolver e de uma incerteza numérica. Concluíram-se pequenos erros relativos à estimativa da solução
exata (3,5% na força de resistência para a malha mais fina) mas incertezas numéricas elevadas devido ao ruído nos
resultados obtido, uma característica deste tipo de problemas. A diminuição da incerteza numérica do cálculo apenas
seria possível obter com refinamentos adicionais, mas que por limitações de âmbito do trabalho e de recursos
disponíveis não se efetuou. Definiu-se uma malha de refinamento intermédio como malha de referência a usar no
trabalho.
Nesta primeira fase, efetuaram-se testes à adequabilidade do esquema de resolução da camada limite (por
exemplo, “All 𝑦+”), dos parâmetros de turbulência da condição de fronteira de entrada (intensidade de turbulência
e rácio de viscosidade turbulenta), das dimensões escolhidas para o domínio computacional (reduzindo
sucessivamente cada uma das dimensões individualmente) e da tipologia da malha em termos de regiões de
refinamento, verificando-se variações mínimas dos resultados para os vários casos descritos. Adicionalmente,
estudou-se a precisão da previsão da transição laminar-turbulento recorrendo ao modelo 𝛾 − 𝑅𝑒𝜃 , que se revelou
pertinente para os apêndices do catamaran, apesar de um impacto global não tão significativo. Devido às
dificuldades acrescidas de convergência dos resultados com a utilização do modelo, decidiu-se não dar continuidade
à sua utilização no trabalho. Contudo, trabalhos futuros relativos aos apêndices do casco deverão considerar o uso
do modelo 𝛾 − 𝑅𝑒𝜃 para melhores resultados.
Na segunda fase foi efetuado o cálculo do escoamento em torno do catamaran considerando os efeitos da
superfície livre, utilizando-se o modelo Volume of Fluid e seguindo-se as recomendações do manual do programa
STAR-CCM+ para a construção do modelo computacional. Para a velocidade de referência (10 nós) concluiu-se que a
resistência viscosa é dominante face à resistência de pressão (63% e 37% da resistência total, respetivamente),
indicando que a resistência viscosa deverá ser o foco de trabalhos futuros com objetivo de redução de resistência
hidrodinâmica. Concluiu-se também que a força vertical produzida à velocidade de referência é suficiente para elevar
o catamaran acima da superfície da água.
73
Nesta segunda fase, obtiveram-se resultados semelhantes quando comparando com o estudo sem
superfície livre (variações inferiores a 8%), concluindo-se que, para o caso do estudo sem superfície livre, o erro de
não se considerar a resistência de onda é atenuado pela resistência acrescida resultante da separação do escoamento
na popa (em oposição ao efeito dry transom) pela resistência devido ao fenómeno de dry transom que se verifica na
popa. Esta conclusão permite que o uso de modelos em que a superfície livre é modelada como um plano de simetria
se apresente como uma alternativa económica e fiável para estudos preliminares sobre o catamaran.
Foi ainda repetido o cálculo com superfície livre para várias velocidades com o objetivo de se obter a
evolução da força de resistência com o número de Froude. Este resultado deverá ser posteriormente comparado
com os dados aerodinâmicos da vela do catamaran. Os resultados obtidos às várias velocidades não permitiram
identificar a velocidade de take-off do catamaran, sendo recomendado a introdução de modelos de movimento com
graus de liberdade de deslocamento na direção vertical e de rotação na direção lateral, permitindo um ajuste à
posição de equilíbrio da embarcação e determinar a velocidade de take-off.
Simulações com superfície livre são caracterizadas por problemas na convergência de resultados e pela
necessidade de discretizações temporais e espaciais muito finas, aumentando substancialmente as exigências
computacionais. Devido à limitação de recursos, não se estudou a influência das referidas discretizações, seguindo-
se apenas as práticas recomendas pelo STAR-CCM+. Adicionalmente, a limitação de recursos não permitiu que se
chegasse a um resultado estacionário, verificando-se oscilações das variáveis de interesse de ±1%.
74
6 SUGESTÕES DE TRABALHOS FUTUROS
Simulação com diferentes discretizações espaciais e temporais, com o objetivo de verificação dos resultados
obtidos e estimativa da incerteza numérica;
Simulação com diferentes domínios computacionais e tipologias de malha, com objetivo de avaliar a
adequabilidade do atual modelo e de minimização das exigências computacionais;
Simulação a vários números de Froude com modelos de movimento com graus de liberdade de
deslocamento na direção vertical e de rotação na direção lateral, com o objetivo de conhecer a estabilidade
dinâmica do catamaran e identificar a velocidade de take-off;
Simulação de outras condições de navegação (p.e. com dois cascos em água, ângulos de adornamento), com
o objetivo de conseguir maior conhecimento sobre o desempenho da embarcação. Sugere-se que estas
simulações sejam feitas considerando os efeitos de superfície livre que poderão afetar significativamente
os resultados (por exemplo em simulações com dois cascos);
Revisão à geometria do casco, com o objetivo de redução da resistência viscosa. Sugere-se a utilização
preliminar de um modelo sem superfície livre e a validação final com um modelo com superfície livre;
Revisão à geometria do daggerboard, com o objetivo de aumentar a sustentação produzida e, portanto,
reduzir a velocidade de take-off. Sugere-se a utilização de um modelo sem superfície livre e a utilização do
modelo 𝛾 − 𝑅𝑒𝜃 para melhores resultados;
Utilização de programas de previsão de velocidade (Velocity Prediction Program – VPP), com o objetivo da
simulação do desempenho do catamaran em navegação pela integração com resultados aerodinâmicos da
vela da embarcação;
Simulação experimental à escala do desempenho hidrodinâmico do catamaran, com o objetivo de validação
dos resultados;
75
7 REFERÊNCIAS
[1] “Small Trimaran Design,” [Online]. Available: http://www.smalltridesign.com/. [Acedido em 29 Agosto 2016].
[2] L. Larsson e R. E. Eliasson, Principles of Yatch Design, London: Adlard Coles Nautical, 2000.
[3] S. C. Misra, Design Principles os Ships and Marine Structures, Boca Raton: CRC Press, 2015.
[4] “International C-Class Catamaran Championship Rules,” [Online]. Available: http://www.c-class.org/class-
rules/. [Acedido em 3 Agosto 2016].
[5] O. M. Faltinsen, Hydrodynamics of high-speed marine vehicles, New York: Cambrige University Press, 2005.
[6] A. F. Molland, J. F. Wellicome e P. R. Couser, “Resistance experiments on a systematic series of high speed
displacement catamaran hull forms: Variation of length-displacement ratio and breadth-draught ratio,” Ship
Science Reports 71, University of Southampton, Southampton, 1994.
[7] M. Haase, G. Davidson, S. Friezer, J. Binns, G. Thomas e N. Bose, “On the macro hydrodynamic design of highly
efficient medium-speed catamarans with minimum resistance,” The International Journal of Maritime
Engineering, vol. 154, nº A3, pp. 131-141, 2012.
[8] ITTC - Recommended Procedures and Guidelines, Speed and Power Trials, Part 2 Analysis of Speed/Power Trial
Data, Revision 1.1, 2014.
[9] V. d. Brederode, Fundamentos de aerodinâmica imcompressível, Lisboa: IST Press, 2014.
[10] L. Larsson e H. Raven, Ship Resistance and Flow, New Jersey: The Society of Naval Architects and Marine
Engineers, 2010.
[11] F. R. Menter, “Two-Equation Eddy-Viscosity Turbulence Models for Engineering Applications,” AIAA, vol. 32, nº
8, pp. 1598-1605, 1994.
[12] L. Eça e M. Hoekstra, “The numerical friction line,” Journal of Marine Science and Technology, vol. 13, nº 4, pp.
328-345, 2008.
[13] F. Menter, R. Langtry, S. Likki, Y. Suzen, P. Huang e S. Völker, “A correlation-based transition model using local
variables Part 1 – Model Formulation,” Journal of Turbomachinery, vol. 128, nº 3, pp. 413-422, 2006.

76
[14] P. Malan, K. Suluksna e E. Juntasaro, “Calibrating the Gamma-ReTheta Transition Model for Commercial CFD,”
em 47th AIAA Aerospace Sciences Meeting, Orlando, 2009.
[15] STAR-CCM+ User Manual v11.04.010.
[16] L. Larsson, F. Stern e M. Visonneau, Numerical Ship Hydrodynamics - An Assessment of the Gothenburg 2010
Workshop, Dordrecht: Springer, 2010.
[17] S. Muzaferija e M. Peric, “Computation of free surface flows using interface-tracking and interface-capturing
methods,” em Nonlinear Water Wave Interaction, Computational Mechanics Publications, Southampton, WIT
Press, 1992.
[18] T. F. Ogilvie, “The wave generated by a fine ship bow,” em Ninth Symp. Naval Hydrodynamics, Washington,
D.C., 1972.
[19] L. J. Doctors, “Hydrodynamics of the flow behind a transom stern,” em Twenty-Ninth Israel Conference on
Mechanical Engineering, Haifa, 2003.
[20] L. Eça e M. Hoekstra, “A procedure for the estimation of the numerical uncertainty of CFD calculations based
on grid refinement studies,” Journal of Computational Physics, vol. 262, pp. 104-130, 2014.
[21] A. J. Cacho, T. Santos e S. R. Silva, Arquitectura Naval, Lisboa: Instituto Superior Técnico, 2014.
[22] H. T. Schlichting, Boundary Layer Theory, Berlin: McGraw-Hill Book Company, 1979.
[23] R. B. Langtry, “Correlation-Based Transition Model using Local Variables for Unstructured Parallelized CFD
codes,” University of Stuttgart, Stuttgart, 2006.
[24] I. M. Viola, R. Flay e R. Ponzini, “CFD Analysis of the Hydrodynamic Performance of Two Candidate America’s
Cup AC33 Hulls,” The International Journal of Small Craft Technology, vol. 154, nº B1, pp. 1-12, 2012.
[25] D. Frisk e L. Tegehall, Prediction of High-Speed Planning Hull Resistance and Running Attitude Thesis for the
Degree of Master of Science, Gothenburg: Chalmers University of Technology, 2015.
[26] M. Haase, J. R. Binns, G. Thomas e N. Bose, “Resistance prediction of medium-speed catamarans using free-
surface viscous flow simulations,” em Proceedings of the 15th Numerical Towing Tank Symposium, Cortona,
Italy, 2012.
[27] S. Gillis, “How do I setup my mesh to best capture VOF Waves,” [Online]. Available:
https://cdadapco.secure.force.com/index/ArticleDetail?id=kA8400000008PRbCAM&type=FAQ__kav&search

77
Term=vof&Product=&Type=&Faq=&_strSearchType=Basic&knowledgebase=true. [Acedido em 17 Agosto
2016].