Embed Size (px)
Citation preview

Sistemas de Controle 1
Pontifícia Universidade Católica de Goiás
Escola de Engenharia
Prof. Dr. Marcos Lajovic Carneiro

Sistemas de Controle 1Prof. Dr. Marcos Lajovic Carneiro
1. Introdução
1.1 Introdução
1.2 História dos Sistemas de Controle
1.3 O Engenheiro de Sistemas de Controle
1.4 Características de Resposta e Configurações de Sistema
1.5 Objetivos de Análise e de Projeto
Introdução a um Estudo de Caso
1.6 Procedimento de Projeto
1.7 Projeto Assistido por Computador
Bibliografia principal:
Engenharia de Sistemas de Controle – Norman S. Nise

1.1 Introdução aos sistemas de controle
3
Disparo de foguetes Ônibus espacial orbitando a Terra
Usinagem de peças
Controle de robôs
Piloto automático
Elevadores
Pâncreas: Regula o açúcar
do sangueAdrenalina: Aumenta o ritmo do coração

1.1 Introdução aos sistemas de controle
4

1.1 Introdução
1.1.a) Definição de Sistema de Controle
5
“Um Sistema que estabeleça uma relação de comparação entre uma saída e uma entrada dereferência, utilizando a diferença como meio de controle, é denominado Sistema de Controle comRealimentação”
K. Ogata – Engenharia de Controle Moderno
“Um Sistema de Controle consiste em sub-sistemas e processos construídos com o objetivo de se obteruma saída desejada, com desempenho desejado para uma entrada específica fornecida.”
N. S. Nise – Engenharia de Sistemas de Controle
“Um Sistema de Controle é uma interconexão de componentes formando uma configuração deSistema que produzirá uma resposta desejada do sistema.”
R.C. Dorf e R.H. Bishop – Sistemas de Controle Moderno

1.1 Introdução
1.1.b) Benefícios dos Sistemas de Controle
6
Razões principais para a construção de sistemas de controle:
- Mover grandes equipamentos com precisão.- Apontar grandes antenas a partir de sinais extremamente fracos.- Controlar com força e precisão o movimento de um elevador. - Manipular braços robóticos em ambientes radioativos.
Realizar atividades que seriam impossíveis a “mão.”

1.2 História dos Sistemas de Controle
7
1) Controle Nível-Líquido
- Sistemas com retroação por volta de 300 a.C.
- Relógio de água inventado por Ktesibios
- Gotejamento em taxa constante em reservatório.
- Nível da água indicava o tempo de corrido.
- Gotejamento constate reservatório de alimentação em nível constante.
- Controle de válvula de alimentação através de uma bóia.
2) Controles de Pressão de Vapor e Temperatura
- Regulação de pressão de vapor começou por volta de 1681.
- Válvula de segurança de Denis Papin.
- Peso acima de uma válvula de controle de pressão.
- Pressão alta válvula subia e deixava o vapor escapar
- Pressão baixa válvula descia e fechava a saída de vapor.
“Panela de pressão”

1.2 História dos Sistemas de Controle
8
2) Controles de Pressão de Vapor e Temperatura
- Cornelis Drebbel no século XVII, na Holanda, inventou um Sistema de
controle de temperatura mecânico para chocar ovos.
- Frasco com álcool e mercúrio como sensor.
- Abafador ligado a um flutuado como atuador controlava uma chama.
3) Controle de Velocidade
- Moinho de vento de Edmund Lee (1745).
- Aumento da velocidade do vento reposicionava as pás de modo a
reduzir a área exposta ao vento.
- James Watt inventou regular de velocidade de esferas para controlar a
velocidade de máquinas de vapor (séc. XVIII).
1.2 História dos Sistemas de Controle
9
4) Estabilidade, Estabilização e Condução
- Teoria dos sistemas de controle de hoje começou a se cristalizar na
segunda metade do século XIX.
- James Clerk Maxwell (1868) Critério de estabilidade de terceira ordem.
- Edward John Routh (1874) Critério de estabilidade de quinta ordem.
- Alexander Michailovich Lyapunov (1892) Estendeu o trabalho de Routh
em sua tese de doutorado “O Problema Geral da Estabilidade do Movimento.”
5) Desenvolvimentos do Século XX
- Sperry Gyroscope Company (1922) Pilotagem automática de
navios .
- H.W.Bode e H.Nyquist (1930) Análise de amplificadores com
retroação nos laboratórios da Bell Telephone.

1.2 História dos Sistemas de Controle
10
6) Aplicações Contemporâneas

1.3 O Engenheiro de Sistemas de Controle
- Percorrer inúmeras áreas do conhecimento. (ver Cap. 2)- Eletricidade, eletrônica, eletromecânica, mecânica (polias, rodas dentadas,
sistemas hidráulicos, sistemas pneumáticos, etc).
- Cargos de nível alto de grandes projetos requisitos globais do projeto- Cargos em áreas específicas:
Exemplos:- Projeto de circuitos- Desenvolvimento de software- Simulação
- Trabalhar com profissionais de diferentes áreas- Trabalho com sistemas biológicos contato com biologos- Engenharia elétrica, mecânica e de computação- Matemáticos, físicos
11

1.3 O Engenheiro de Sistemas de Controle
12
Currículo dos cursos de Engenharia
Ênfase no projeto de baixo para cima- Estudo de matemática, física, componentes, circuitos e finalmente o produto.
Projeto de cima para baixo- Abordagem dos Sistemas de Controle- Visão de alto nível do projeto, em seguida funções e o hardware necessário.
As razões principais para não ensinar o projeto de cima para baixo ao longo de todo o currículo é o alto nível de matemática exigido para a abordagem de sistemas.
Início da disciplina de Sistemas de Controle:
Resolução de equações diferenciais por Transformada de LaplaceRequisito básico: Cálculo, Equações diferenciais, Sistemas Lineares
Modelagem matemática de sistemas reaisRequisito básico: Física, Circuitos, Eletrônica

1.4 Características de Resposta e Configurações de Sistema
13
1) Entrada e Saída
Entrada: valor desejadoSaída: Resposta
Analisando a Resposta do saída de um elevador
• Não pode mudar de forma instantânea- Sistema físico real (resposta transitória)- Conforto e segurança- Potência limitada
• Estado estacionário (regime permanente)- Erro de estado estacionário:
1) Inerente ao Sistema de controle2) Defeito

1.4 Características de Resposta e Configurações de Sistema
14
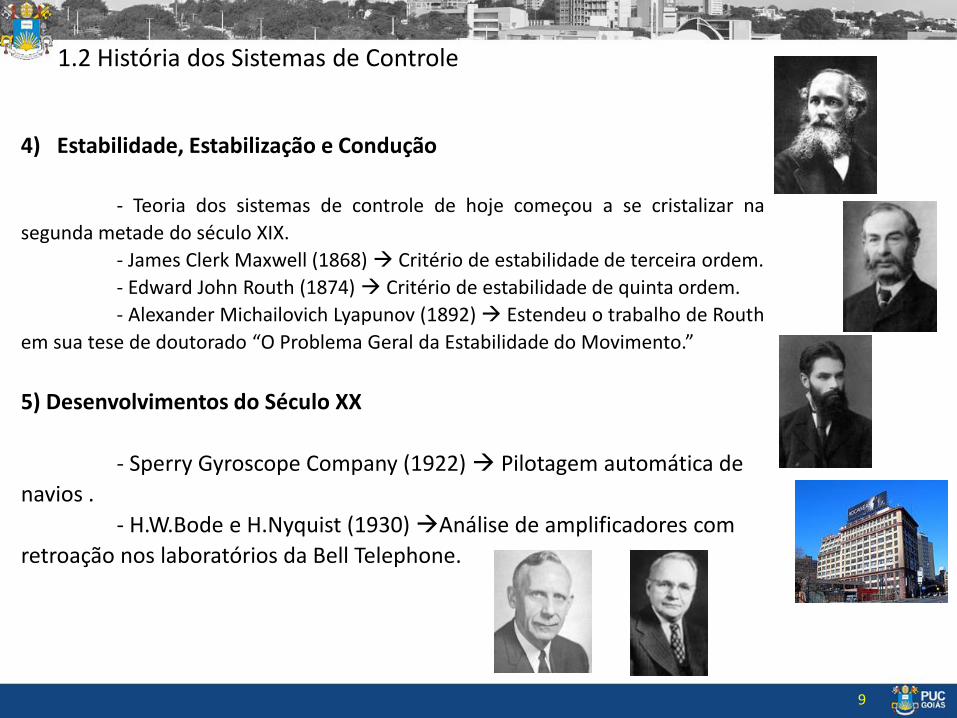
2) Sistemas a Malha Aberta
Converte forma de entrada na forma usada
pelo controlador
Age sobre um processo ou planta.
Exemplo: - Sistema elétrico de
controle de válvulasde combustível
Exemplos:- Caldeira- Condicionador de ar
Exemplo:Temperatura
1.4 Características de Resposta e Configurações de Sistema
15
2) Sistemas a Malha Aberta
- Não corrigem efeitos de perturbações- Comandados apenas pela entrada
Exemplos de sistemas em malha aberta:- Torradeira
- Saída: Cor da torrada- Entrada: Tempo- Perturbações: tipo de massa, espessura da torrada
- Método para passar em uma disciplina- Saída: Nota na prova- Entrada: Tempo de estudo- Perturbação: capítulo não previsto adicionado na matéria, doença, festas.

1.4 Características de Resposta e Configurações de Sistema
16
3) Sistemas a Malha Fechada (Controle com Retroação)
Exemplo: Sistema de controle de temperatura
potenciômetro
termistor
Sinal atuante é chamado erroquando transdutores de entrada e saída possuem ganho unitário
Enquanto houver uma diferença entre o sinal de saída e a resposta desejada o Sistema irá atuar para regular a saída.

1.4 Características de Resposta e Configurações de Sistema
17
3) Sistemas a Malha Fechada (Controle com Retroação)
Vantagens- Maior precisão que os sistemas de malha aberta.- Menos sensíveis a ruídos, perturbações e mudanças nas condições ambientes.- Maior flexibilidade no controle da resposta transitória e estacionária.
Compensação Re-projeto do controlador- Hardware resultante é o compensador.
Desvantagens- Mais complexos- Mais caros
Analisar custo-benefícioSimplicidade e baixo custo vs precisão e maior custo

1.4 Características de Resposta e Configurações de Sistema
18
4) Sistemas Controlados por Computador
Controlador (ou compensador) computador digital
Vantagens- Controlar ou compensar muitas malhas pelo mesmo computador de forma compartilhada (time sharing).- Ajustes de parâmetros feito via software e não hardware.- Funções de supervisão e agendamento.

1.5 a) Objetivos de Análise e de Projeto
19
1) Resposta Transitória
Caso do elevador
- Resposta muito lenta: impaciência
- Resposta muito rápida: desconforto
- Resposta oscilante antes de parar: sensação de
embaraço
- Resposta excessivamente rápida: danos
estruturais
Caso do disco rígido (HD)
- Tempo de resposta transitório: tempo de leitura
e gravação
1° Objetivo da análise e projeto: controlar cada
aspecto da resposta transitória.

1.5 a) Objetivos de Análise e de Projeto
20
2) Resposta de Estado Estacionário
3) Estabilidade
- Fator principal: Precisão
2° Objetivo da análise e projeto: - Analisar de forma quantitativa o erro.- Reduzir erro de regime permanente.
A análise da resposta transitória e do erro de estado estacionário deve ser feita após garantida a estabilidade.
Sistema estável:- Regime permanente resposta natural tenda a zero ou oscila
Sistema instável:- Resposta natural cresce indefinidamente
(Resposta homogênea) (Resposta particular)
Resposta natural tende
a zero

1.5 a) Objetivos de Análise e de Projeto
21
4) Outras considerações
• Fatores que afetam a seleção do hardware- Dimensionamento de acordo com a potência necessária- Escolha dos sensores de acordo com a precisão- Custos
1) Dispositivo único, protótipo, prova de conceito Custo elevado é aceito2) Dispositivo para mercado competitivo otimizar custo-benefício
- Robustez1) De que forma o envelhecimento do aparelho altera a resposta?2) Tolerâncias dos componentes alteram de que forma um conjunto grande de
produtos?3) Efeitos de mudança de temperatura4) Uso excessivo ou longo tempo sem uso afeta de que forma o desempenho.

1.5 b) Introdução a um Estudo de Caso
Sistema de controle de posicionamento de uma Antena em Azimute
22
• Converter um comando de posição de entrada para uma resposta em posição na saída.
Exemplo de aplicações:Antena, braços robóticos, acionadores de disco rígido.
Exemplo progressivo ao longo dos capítulos do livro
1.5 b) Introdução a um Estudo de Caso
23
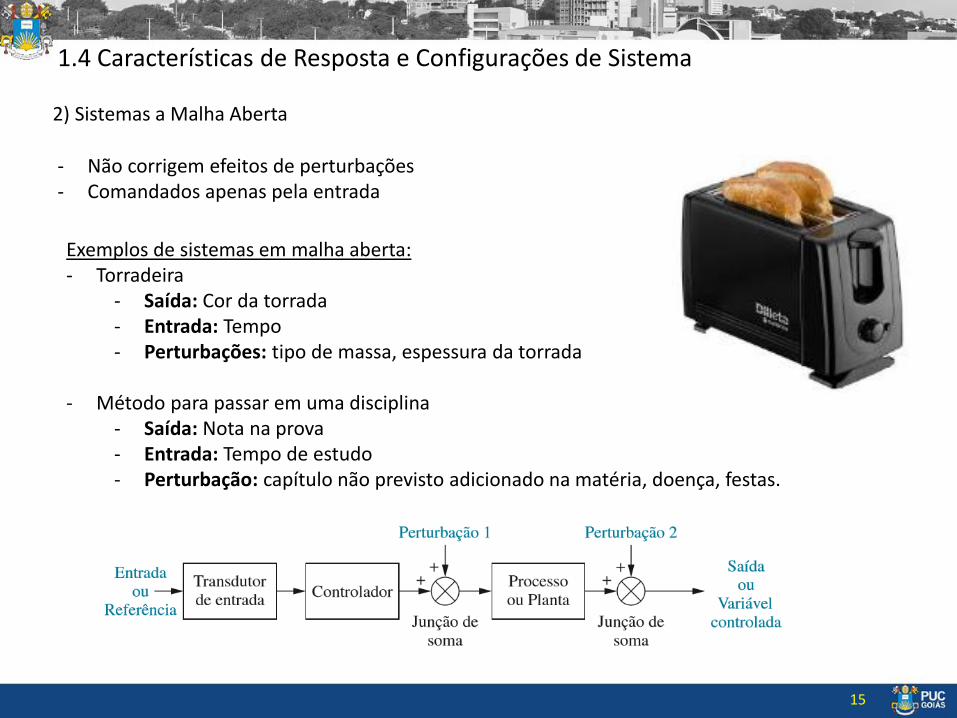
Nível progressivo de detalhamento
Diagrama de blocos funcional
Projeto do Sistema segue níveis progressivos de detalhamento.- Definição dos objetivos, entradas e saídas.- Possíveis componentes físicos do sistema.- Diagrama de blocos funcional.- Descrição física dos componentes dos subsistemas.

1.5 b) Introdução a um Estudo de Caso
Maiores níveis de ganho produzem respostas mais rápidas
24
Antena pode passar da posição correta e ter que retornar
Resposta transitória com oscilações amortecidas
Resposta transitória
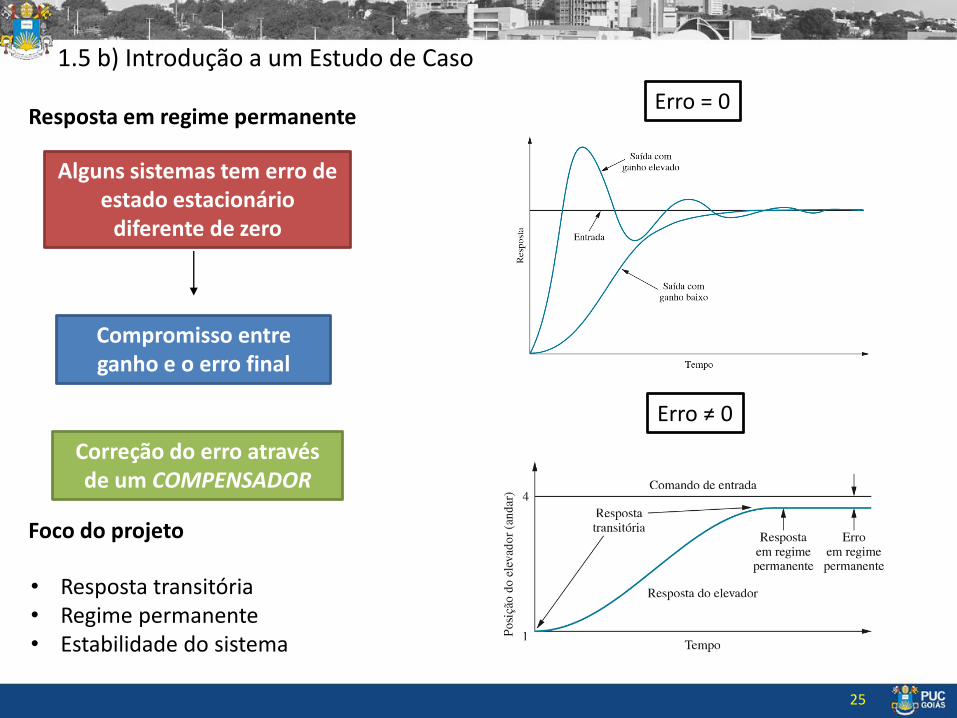
1.5 b) Introdução a um Estudo de Caso
Alguns sistemas tem erro de estado estacionário
diferente de zero
25
Compromisso entre ganho e o erro final
Resposta em regime permanente
Erro ≠ 0
Erro = 0
Correção do erro através de um COMPENSADOR
Foco do projeto
• Resposta transitória• Regime permanente• Estabilidade do sistema

1.6 Procedimento de Projeto
26

1.6 Procedimento de Projeto
Passo 1
Transformar os requisitos em um sistema físico.
Exemplo:
Requisito: Desejo de posicionar antena a partir de uma localização remota.
Descrição do sistema: Peso da antena Dimensões físicas da antena
Especificações de projeto: Resposta transitória desejada Exatidão do estado estacionário
27
Noção global do sistema

1.6 Procedimento de Projeto
Passo 2
Desenhar diagrama de blocos funcional Desenhar layout
Exemplo:
Descrever Partes componentes do sistema (função e/ou hardware). Mostrar interconexões
28
Layout Diagrama de blocos funcional

1.6 Procedimento de Projeto
Passo 3
Criar diagrama esquemático
Exemplo:
Deduzir um esquema a partir do diagrama de blocos. Fazer aproximações e simplificações. Verificar onde é possível:
Desprezar o atrito Desprezar inércia Considerar mudanças instantâneas. Desprezar indutância da armadura
(motor CC)
• As decisões não são fáceis• Experiência prática do engenheiro auxilia
as escolhas
29
Diagrama esquemático
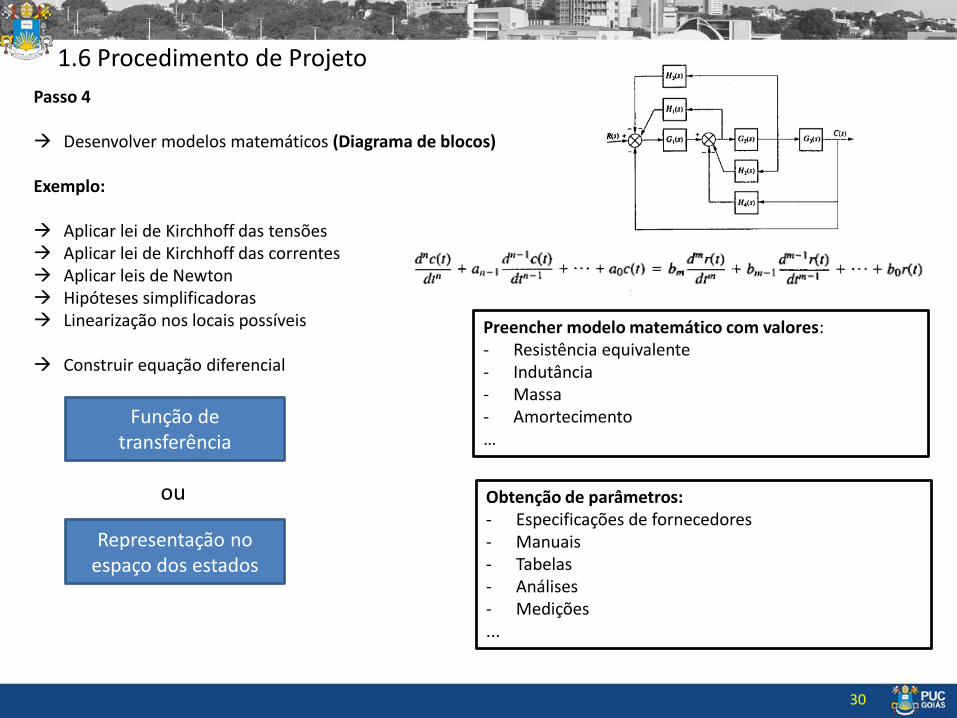
1.6 Procedimento de Projeto
Passo 4
Desenvolver modelos matemáticos (Diagrama de blocos)
Exemplo:
Aplicar lei de Kirchhoff das tensões Aplicar lei de Kirchhoff das correntes Aplicar leis de Newton Hipóteses simplificadoras Linearização nos locais possíveis
Construir equação diferencial
30
Função de transferência
Representação no espaço dos estados
ou
Preencher modelo matemático com valores:- Resistência equivalente- Indutância- Massa- Amortecimento…
Obtenção de parâmetros:- Especificações de fornecedores- Manuais- Tabelas- Análises- Medições...

1.6 Procedimento de Projeto
Passo 5
Reduzir diagrama de blocos
Exemplo:
Unir blocos Realizar operações entre blocos Deduzir um bloco único Representação matemática de todo o sistema Relação entrada e saída
31

1.6 Procedimento de Projeto
Passo 6
Analisar e projetar
Exemplo:
Verificar se o desempenho pode ser alcançadoatravés de ajustes de parâmateros
Projetar hardware adicional se necessário Aplicar sinais padrões de entrada
Impulsos Degraus Rampas Parábolas Senoides
Calcular a resposta no tempo Análise de sensibilidade
32

1.6 Procedimento de Projeto
33

1.7 Projeto Assistido por Computador
Laboratórios
Matlab/SimulinkWolfram AphaOctaveScilab
Outras disciplinas:
PSpiceInventorSimulação de CLPsRobotStudio
34
Exercícios
35
Iniciar em sala e finalizar em casa
36
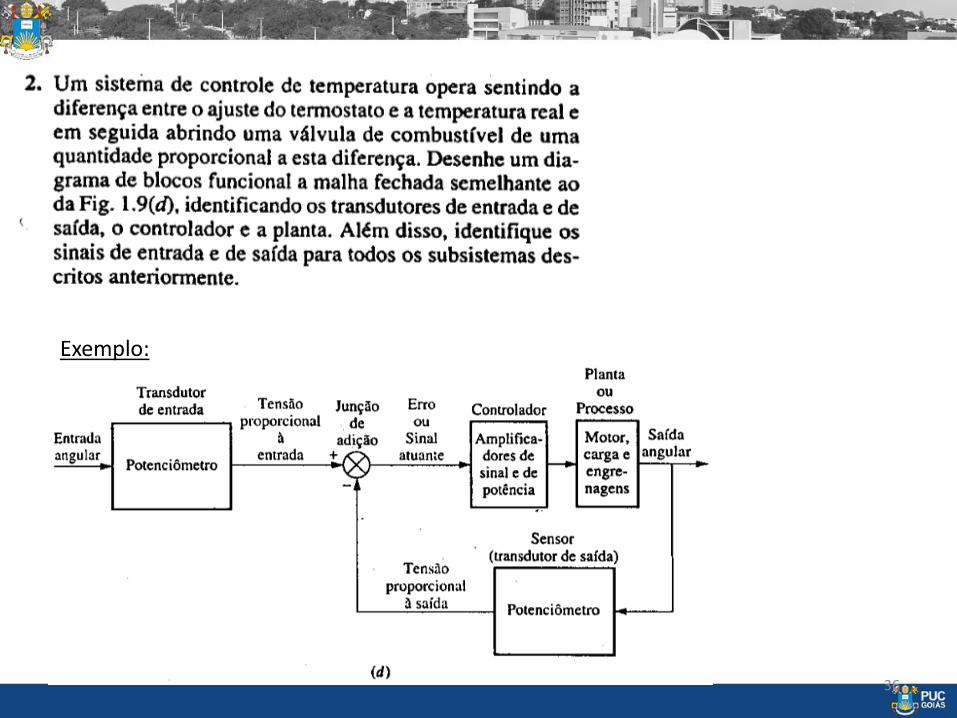
Exemplo:
37
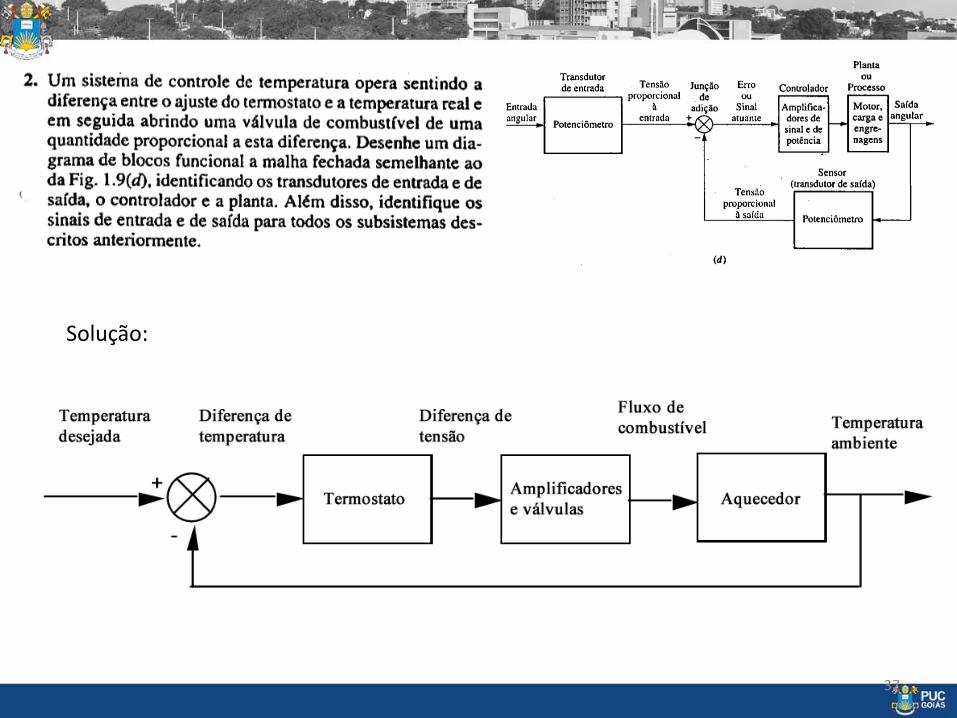
Solução:

38

39
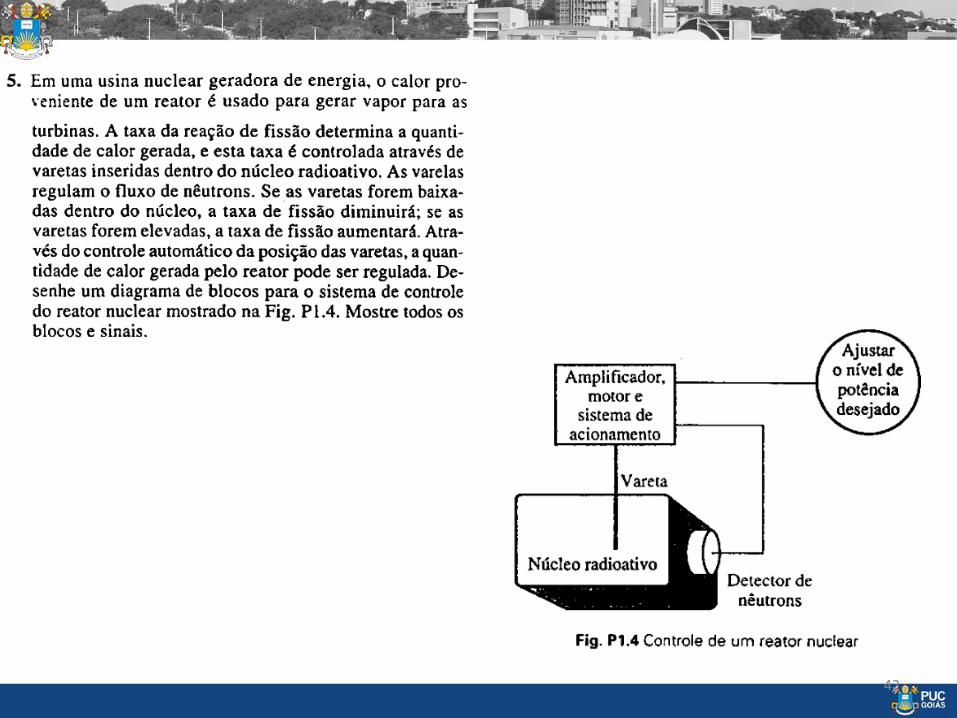
Solução:

40

41
Solução:
42

43