Embed Size (px)
Citation preview

Sistemas de Controle 1Cap6 – Estabilidade
Pontifícia Universidade Católica de GoiásEscola de Engenharia
Prof. Filipe Fraga
Sistemas de Controle 1
6. Estabilidade
6.1 Introdução
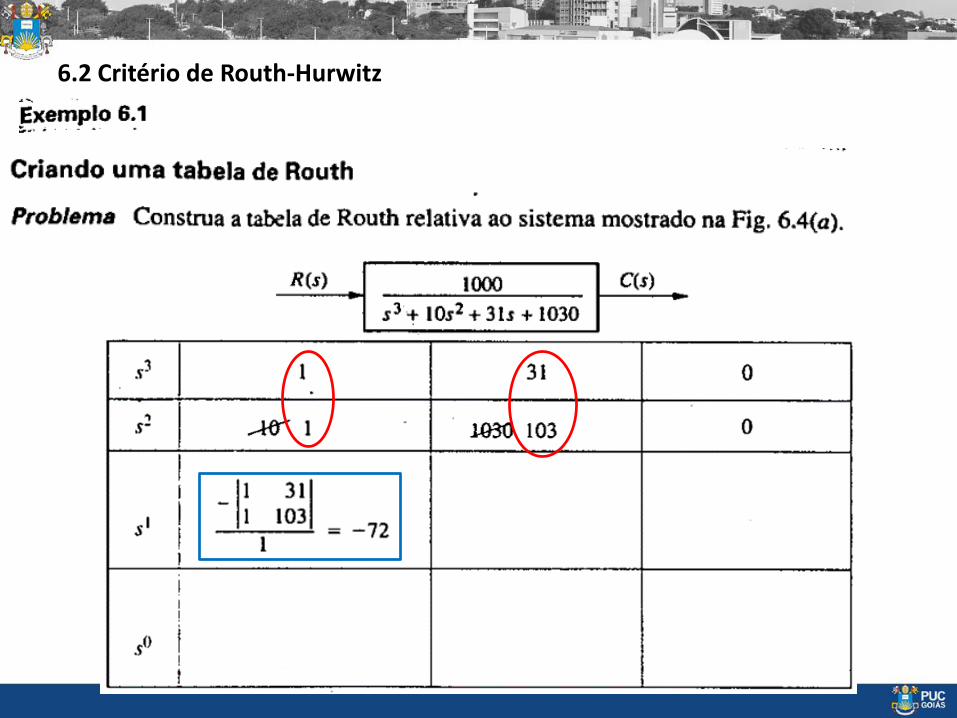
6.2 Critério de Routh-Hurwitz
6.3 Critério de Routh-Hurwitz: Casos Especiais
6.4 Critério de Routh-Hurwitz: Exemplos Adicionais
6.5 Estabilidade no Espaço de Estados
6.1 Introdução
Projeto de sistemas de controle 3 requisitos- Resposta transitória (Cap. 4 e 8)- Estabilidade (Cap. 6)- Resposta em estado estacionário (Cap. 7) – Inicio do Controle II
Estabilidade Especificação mais importante do sistema• Sem estabilidade a resposta transitória e em estado permanente perdem o
significado.
Estudo limitado a sistema lineares e invariantes no tempo

6.1 Introdução
Sistema estável: a resposta natural tende a zero quando o tempo tender a infinito.Sistema instável: a resposta natural cresce, sem limites, à medida que o tempo tende para infinito. Sistema marginalmente estável: a resposta natural nem cresce nem se atenua,permanecendo constante ou oscilante, à medida que o tempo tende para o infinito.
Resposta de um sistema:
Um sistema é estável se toda entrada limitada gerar uma saída limitada.
• Definição de estabilidade entrada-limitada saída-limitada, ou estabilidade BIBO(Bounded-Input Bounded-Output)
Um sistema é instável se alguma entrada limitada gerar uma saída ilimitada.
• Definição alternativa de instabilidade (estabilidade BIBO)
Definições de estabilidade baseadas na resposta total:
Definições de estabilidade baseadas na resposta natural:

6.1 Introdução
Pólos no semiplano da esquerda produzem como resposta natural exponenciais decrescentes ou senóides amortecidas.
Os sistemas estáveis possuem função de transferência a malha fechada com pólos somente no semiplano da esquerda.
Estabilidade de acordo com os pólos

6.1 Introdução
Estabilidade de acordo com os pólos
Atenção: pólos em malha fechada

6.1 Introdução
Pólos de multiplicidade 1 no eixo imaginário produz como resposta natural oscilações senoidais puras.
Sistemas marginalmente estáveis apresentam função de transferência a malha fechada com somente pólos de multiplicidade 1 no eixo imaginário e pólos no semiplano s da esquerda.
Sistema marginalmente estável de acordo com os pólos

6.1 Introdução
Pólos no semiplano da direita conduzem a respostas naturais crescentes de forma exponencial ou a respostas naturais senoidais de amplitude exponencialmente crescente
Os sistemas instáveis possuem função de transferência a malha fechada com pelo menos um pólo no semiplano s da direita e/ou pólos de multiplicidade maior que um no eixo imaginário.
Instabilidade de acordo com os pólos
Pólos de multiplicidade maior que 1 no eixo imaginário conduzem à soma de respostas da forma 𝐴𝑡𝑛cos(𝜔𝑡 + 𝜙), onde n=1,2, .... que também tende a infinito quando o tempo tender a infinito.

6.1 Introdução
Comparando a estabilidade de sistemas
A mudança no ganho pode tornar um sistema instável

6.1 Introdução
Comparando a estabilidade de sistemas
Nem sempre é fácil determinar a instabilidade de um sistema
Não é possível saber a estabilidade apenas com as raízes do canal direto visualmente.
É preciso conhecer a posição dos pólos em malha fechada
• Calcular função em malha fechada• Fatorar ou calcular as raízes

6.1 Introdução
Algumas conclusões podem ser obtidas de alguns sistemas em malha fechada T(s):
somente pólos no semiplano da
esquerda
Fatores do denominador serão produtos (𝑠 + 𝑎𝑖)com 𝑎𝑖 real e positivo ou complexo com parte real positiva.
Polinômio do denominador com todos os coeficientes positivos
Nenhum termo do polinômio pode estar faltando
Sistema estável
Não é possível ter certeza da estabilidade
Sistema instável
Quando nem todos os sinais dos coeficientes do denominador da função de transferência são iguais.
Se estiverem faltando potências de s (instável ou no máximo marginalmente estável)

6.2 Critério de Routh-Hurwitz
Método para testar a estabilidade sem ter que calcular as raízes do denominador da função de transferência.
O método fornece quantos pólos estão no semiplano da esquerda, da direita e sobre o eixo imaginário. O método não fornece as coordenadas dos pólos.
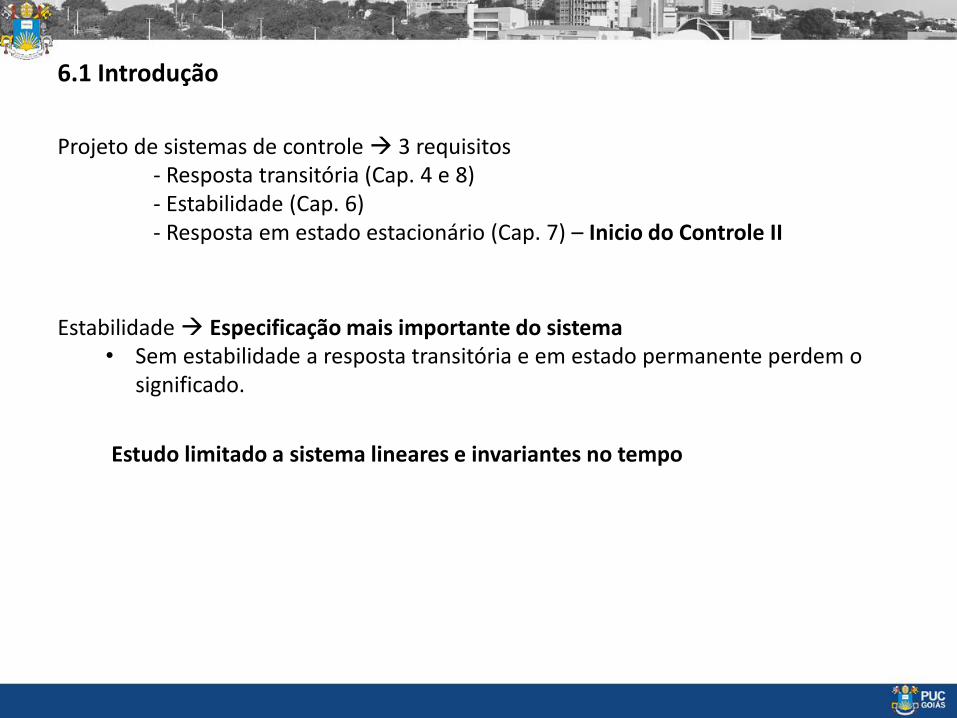
Produzindo uma Tabela de Routh Básica
• Rotular linhas segundo potências de “s”• Preencher as duas primeiras linhas
• Coeficiente do s com maior potência no primeiro elemento.
• Distribuir de forma salteada os coeficientes na primeira linha.
• Distribuir demais coeficientes na segunda linha.
6.2 Critério de Routh-Hurwitz
Produzindo uma Tabela de Routh Básica
• Cada uma das células é preenchida com o valor negativo dos determinantes formados com os elementos das duas linhas anteriores dividido pelo elemento da primeira coluna diretamente acima da linha sendo calculada.
• A coluna da esquerda do determinante é sempre a primeira coluna das duas linhas anteriores, e a coluna do lado direito do determinante é formada com os elementos da coluna acima e à direita.

6.2 Critério de Routh-Hurwitz

6.2 Critério de Routh-Hurwitz
𝑇 𝑠 =
1000(𝑠 + 2)(𝑠 + 3)(𝑠 + 5)
1 +1000
(𝑠 + 2)(𝑠 + 3)(𝑠 + 5)
=
1000(𝑠 + 2)(𝑠 + 3)(𝑠 + 5)
𝑠 + 2 𝑠 + 3 𝑠 + 5 + 1000(𝑠 + 2)(𝑠 + 3)(𝑠 + 5)
=1000
𝑠 + 2 𝑠 + 3 𝑠 + 5 + 1000
=1000
𝑠3 + 10𝑠2 + 31𝑠 + 1030

6.2 Critério de Routh-Hurwitz

6.2 Critério de Routh-Hurwitz
𝑥1
10
6.2 Critério de Routh-Hurwitz

6.2 Critério de Routh-Hurwitz

6.2 Critério de Routh-Hurwitz
0
0

6.2 Critério de Routh-Hurwitz

6.2 Critério de Routh-Hurwitz

6.2 Critério de Routh-Hurwitz
0
0

6.2 Critério de Routh-Hurwitz

6.2 Critério de Routh-Hurwitz
Interpretando a Tabela de Routh Básica
• O número de raízes de um polinômio que estão no semiplano da direita é igual ao número de mudanças de sinal na primeira coluna.
• Se todos os pólos estiverem à esquerda o sistema é estável.
+
-
+
• Duas mudanças de sinal.• Dois pólos a direta.
• Sistema instável

6.2 Critério de Routh-Hurwitz

6.2 Critério de Routh-Hurwitz

6.2 Critério de Routh-Hurwitz

6.2 Critério de Routh-Hurwitz

6.3 Critério de Routh-Hurwitz: Casos Especiais
(1) a tabela de Routh algumas vezes terá um zero somente na primeira coluna de uma linha.
(2) a tabela de Routh apresentará uma linha inteira de zeros.
0

6.3 Critério de Routh-Hurwitz: Casos Especiais
Zero Somente na Primeira Coluna
Zero na primeira coluna representa um problema na divisão. Substituir este zero por um épsilon 𝜖 Faz-se com que épsilon tenda a zero por valores positivos ou negativos Verificam-se as mudanças de sinal.

6.3 Critério de Routh-Hurwitz: Casos Especiais

6.3 Critério de Routh-Hurwitz: Casos Especiais

6.3 Critério de Routh-Hurwitz: Casos Especiais

6.3 Critério de Routh-Hurwitz: Casos Especiais

6.3 Critério de Routh-Hurwitz: Casos Especiais

6.3 Critério de Routh-Hurwitz: Casos Especiais

6.3 Critério de Routh-Hurwitz: Casos Especiais
Existem duas mudanças de sinal.
Dois pólos à direta
Sistema Instável

6.3 Critério de Routh-Hurwitz: Casos Especiais
Outro método de solução: Polinômio com raízes recíprocas
• Escreva um polinômio que tenha raízes recíprocas do denominador.• Este polinômio é formado escrevendo-se o denominador em ordem inversa das
potências de s. • Forma-se a tabela de Routh e realiza-se a análise convencional
A nova tabela de Routh provavelmente não terá o zero na primeira coluna

6.3 Critério de Routh-Hurwitz: Casos Especiais
Estabilidade via coeficientes na inversa

6.3 Critério de Routh-Hurwitz: Casos Especiais
Estabilidade via coeficientes na inversa
Polinômio com raízes recíprocas

6.3 Critério de Routh-Hurwitz: Casos Especiais
Estabilidade via coeficientes na inversa
Como há duas mudanças de sinal, o sistema é instável e possui dois pólos no semiplano da direita.

6.3 Critério de Routh-Hurwitz: Casos Especiais
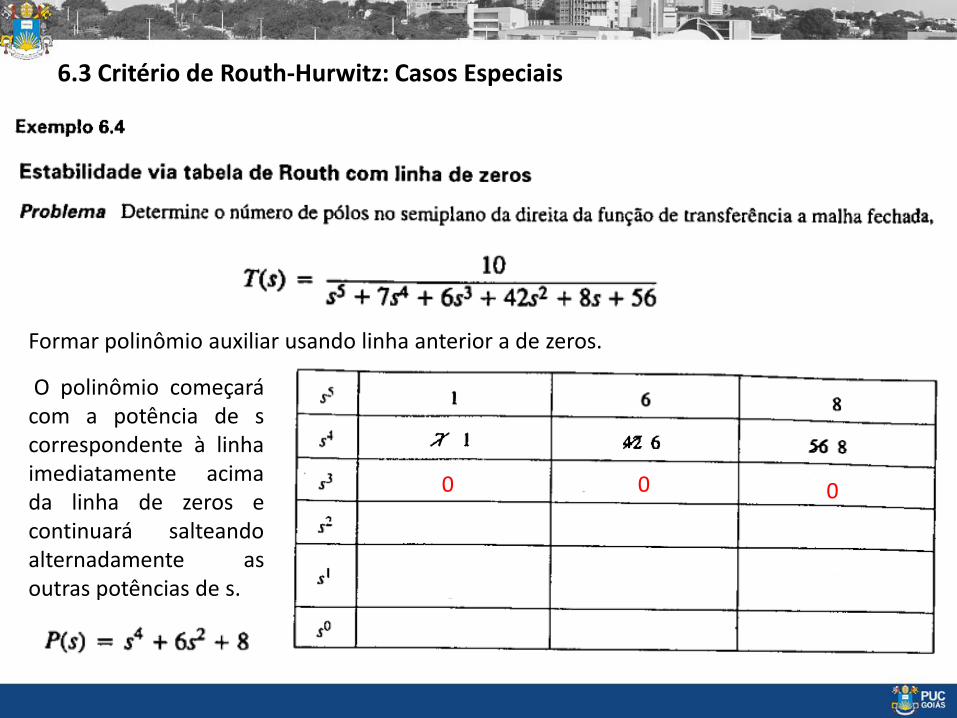
Linha Completa de Zeros segundo caso especial
Algumas vezes, ao construir uma tabela de Routh, descobrimos uma linha completa de zeros porque há um polinômio par como fator do polinômio original.

6.3 Critério de Routh-Hurwitz: Casos Especiais

6.3 Critério de Routh-Hurwitz: Casos Especiais
𝑥1
7

6.3 Critério de Routh-Hurwitz: Casos Especiais
−
1 61 61
= 0
−
1 81 81
= 0
0 0 0
−
1 01 01
= 0
6.3 Critério de Routh-Hurwitz: Casos Especiais
0 0 0
Formar polinômio auxiliar usando linha anterior a de zeros.
O polinômio começarácom a potência de scorrespondente à linhaimediatamente acimada linha de zeros econtinuará salteandoalternadamente asoutras potências de s.

6.3 Critério de Routh-Hurwitz: Casos Especiais
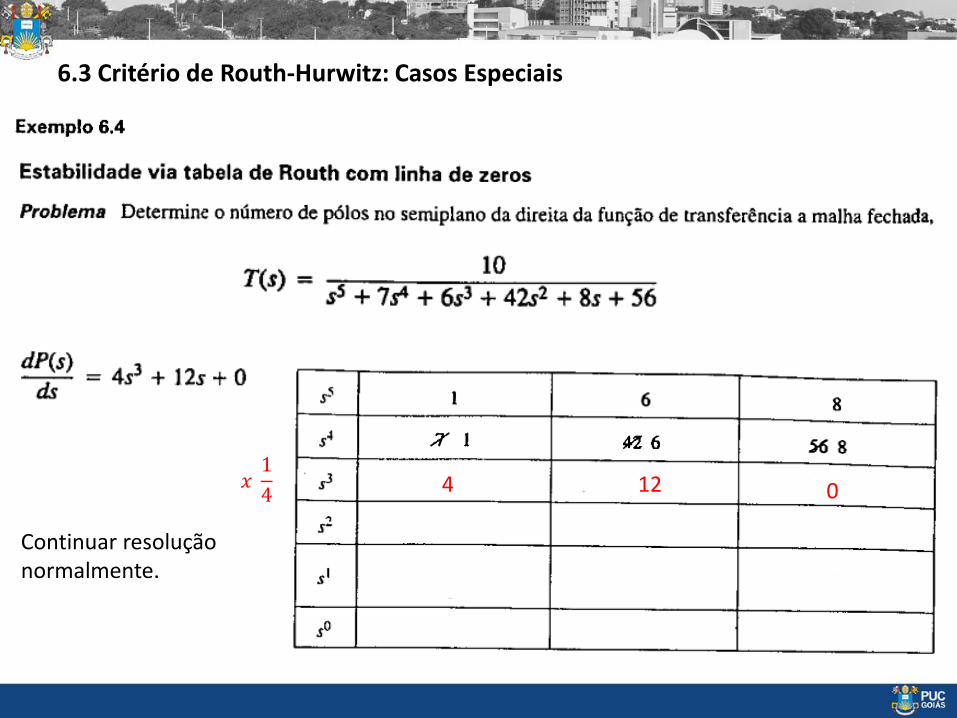
Derivar em relação a “s”
Usar os coeficientes da equação derivada para substituir a linha de zeros.
6.3 Critério de Routh-Hurwitz: Casos Especiais
4 12 0𝑥1
4
Continuar resolução normalmente.

6.3 Critério de Routh-Hurwitz: Casos Especiais
Nenhuma mudança de sinal.
Não há pólos do lado direito.