Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO
CAMPUS ANGICOS
CURSO DE CIÊNCIA E TECNOLOGIA
ÍTALO DE MENEZES GOMES
ANÁLISE E REVISÃO BIBLIOGRÁFICA DE ALGUNS MÉTODOS DE
INTEGRAÇÃO NUMÉRICA SIMPLES
ANGICOS-RN
2012



A Deus, por tudo que ele faz por mim, a
minha mãe e irmã, que sempre me
apoiaram nos momentos mais difíceis.

“Você não pode controlar o vento, mas
pode ajustar as velas”.
(Autor desconhecido)

LISTA DE GRÁFICOS
Gráfico 1 – Soma de Riemann........................................................................................13
Gráfico 2 – Soma de Riemann com diferente número de subintervalos.........................14
Gráfico 3 – Polinômio Interpolador.................................................................................21
Gráfico 4 - Interpolação Linear.......................................................................................23
Gráfico 5 – Interpolação por Lagrange............................................................................23
Gráfico 6 – Regra do Trapézio....................................................................................... 24
Gráfico 7 – Regra do Trapézio Generalizada................................................................. 26
Gráfico 8 – Regra 1/3 de Simpson.................................................................................. 27
Gráfico 9 – Soma de Riemann – Ponto à Esquerda....................................................... 31
Gráfico 10 - Soma de Riemann – Ponto médio.............................................................. 32
Gráfico 11 – Soma de Riemann – Ponto à Direita......................................................... 33
Gráfico 12 – Regra dos Trapézios.................................................................................. 34
Gráfcio 13 – Função x²....................................................................................................37
Gráfico 14 – Ponto à Esquerda com n=10...................................................................... 39
Gráfico 15 – Ponto médio com n=10.............................................................................. 39
Gráfico 16 – Ponto à direita com n=10.......................................................................... 40
Gráfico 17 – Regra do Trapézio com n=10.................................................................... 40
Gráfico 18 – Função .................................................................................................. 41
Gráfico 19 – Função
...............................................................................................43

Gráfico 20 – Função .......................................................................................... 45
Gráfico 21 – Sen(x) ....................................................................................................... 47
LISTA DE TABELAS
Tabela 1 – Comparativa entre os métodos computacionais........................................... 38
Tabela 2 – Comparativa entre os métodos computacionais........................................... 42
Tabela 3 – Comparativa entre os métodos computacionais........................................... 44
Tabela 4 – Comparativa entre os métodos computacionais........................................... 46
Tabela 5 – Comparativa entre os métodos computacionais........................................... 48

LISTA DE FIGURAS
Figura 1 - Partição de um intervalo [a;b] em n pontos..................................................12
Figura 2 - Escolha arbitrária de um número ci, dentro de cada intervalo [xi−1;xi]........12

ÍTALO DE MENEZES GOMES
ANÁLISE E REVISÃO BIBLIOGRÁFICA DE ALGUNS MÉTODOS DE INTEGRAÇÃONUMÉRICA SIMPLES
ANGICOS-RN2012

ÍTALO DE MENEZES GOMES
ANÁLISE E REVISÃO BIBLIOGRÁFICA DE ALGUNS MÉTODOS DE INTEGRAÇÃONUMÉRICA SIMPLES
Monografia apresentada a UniversidadeFederal Rural do Semi-Árido - UFERSA,Campus Angicos para a obtenção do tit-ulo de Bacharelado em Ciência e Tec-nologia. Orientador: Prof. Ms. Matheusda Silva Menezes - UFERSA
ANGICOS-RN2012

AGRADECIMENTOS
A Deus, por nunca me ter deixado baixar a cabeça para os problemas mais difíceis en-contrados em minha jornada na Terra, por sempre ter me dado força suficiente para enfrentartodas as dificuldades, sempre me iluminando e me abençoado, graças a ele eu devo tudo que eusou hoje.
Aos meus pais, Francisco Gomes da Silva e Simone Menezes de Melo. Mesmo o senhornão estando presentes em certos momentos que precisei, agradeço por sempre procurar me en-corajar a seguir em frente, enfim foram poucas oportunidades, mais agradeço pela participação,apoio e por ter acreditado no meu potencial. Sendo que minha mãe teve uma participação muitoespecial e intensa, sempre acreditando em mim, me confortando em todos os momentos, deposi-tando total confiança em mim, investindo pesado nos meus estudos, sofrendo comigo quandotiro notas a baixo da média e sonhando junto comigo por esse momento tão especial. Chegueiaonde cheguei por ter a senhora como uma mãe maravilhosa, atenciosa, preocupada, compan-heira de todos os momentos, um exemplo de mãe para qualquer pessoa. Muito obrigado portudo minha querida mãe, te amo muito.
A minha irmã, Ingrid de Menezes Gomes que sempre teve paciência comigo, que sempretorceu pelo meu melhor, que sempre acreditou nos meus ideais, nos meus sonhos e que sempresonhou comigo. Tenho muito orgulho de te ter como irmã, e quase nunca me expresso contigo,mas saiba que eu te amo muito e quero estar ao seu lado sempre.
Aos meus amigos, Ericson Romualdo Fonseca Ferreira e a Lucas Mendes Moura Maia,pela irmandade e companheirismo, sempre estando comigo nos momentos bons e ruins, amigoscom os quais quero levar adiante.
Aos cabas que marcaram o curso com a descontração e alegria, amigos de farra, decachaça, amigo pra toda hora. Em especial ao clube da casa verde, composto por João PauloCaraú, Emerson Talles e a Francisco Gouveia.
As meninas, Mardja Luma e Lediane Marques, que me ajudaram nas atividades que quasenunca eu fazia, mas sempre estavam lá para fazerem e me ajudarem. Muito obrigado pela ajudae dedicação, sempre procurando o meu melhor. Quero levar essa amizade para onde eu for,sempre que precisar estarei ao lado de vocês. A minha nova Irmã que fiz em Angicos, AndreaNoberto, desde o primeiro período estando comigo, sendo de forma mais intensa nos primeirosperíodos quase inseparáveis, momentos que sempre estarão guardados em minhas lembranças.
Ao meu orientador Matheus da Silva Menezes, que foi muito mais que um orientador,foi um amigo que fiz. Sempre me orientando da melhor forma possível, me guiando para omeu melhor, com muita paciência, empenho e sempre acreditando que eu ia chegar aonde eucheguei. Muito obrigado por sempre me passar tranqüilidade e confiança.

A todas aquelas pessoas que me acompanharam e me ajudaram de forma direta ou indiretanesses três anos de curso, o meu muito obrigado.

RESUMO
O presente trabalho tem por objetivo descrever e avaliar as principais técnicas definidas na liter-atura, voltadas a resolução de integrais definidas. Nesse ponto, serão abordados os métodos deSoma de Riemann, regra do Trapézio e regra 1/3 de Simpson. Visando avaliar a eficiência dosmétodos, serão realizados testes numéricos, ultilizando a ferramenta SCILAB 5.3.2, mediantea aplicação de problemas reais aos métodos estudados. Realizado a aplicação de problemas, opresente trabalho descreve uma análise comparativa dos métodos em termos de precisão, tempo,erro e quantidade de subintervalos.
Palavras chave: Integração Numérica. Soma de Riemann. Regra do Trapézio. Regra 13 de
Simpson.

Sumário
1 INTRODUÇÃO 81.1 JUSTIFICATIVA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2 OBJETIVOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.1 Objetivo geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.2 Objetivos específicos . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.3 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 UMA BREVE REVISÃO SOBRE INTEGRAIS 102.1 FUNÇÕES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 INTEGRAL DE RIEMANN . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.1 Partição de um intervalo . . . . . . . . . . . . . . . . . . . . . . . . . 112.2.2 Soma de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2.3 Integral de Riemman: Definição . . . . . . . . . . . . . . . . . . . . . 122.2.4 Propriedades da Integral . . . . . . . . . . . . . . . . . . . . . . . . . 132.2.5 1o Teorema Fundamental do Cálculo . . . . . . . . . . . . . . . . . . . 14
2.3 METÓDOS DE INTEGRAÇÃO ANALÍTICA . . . . . . . . . . . . . . . . . 142.3.1 Regra da Substituição . . . . . . . . . . . . . . . . . . . . . . . . . . 142.3.2 Integração por Partes . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 INTEGRAÇÃO NUMÉRICA 173.1 CONSIDERAÇÕES INICIAIS . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2 INTERPOLAÇÃO POLINOMIAL . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.1 Interpolação de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . 213.3 FÓRMULAS DE NEWTON-COTES . . . . . . . . . . . . . . . . . . . . . . 23
3.3.1 Regra dos Trapézios . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3.2 Regra dos Trapézios Generalizada . . . . . . . . . . . . . . . . . . . . 253.3.3 Regra 1/3 de Simpson . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3.4 Regra 3
8 de Simpson . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4 RESULTADOS E DISCUSSÕES 294.1 MÉTODOS NUMÉRICOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.2 EXPERIMENTOS NUMÉRICOS . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2.1 Análise do Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2.2 Análise do Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . 394.2.3 Análise do Problema 3 . . . . . . . . . . . . . . . . . . . . . . . . . . 414.2.4 Análise do Problema 4 . . . . . . . . . . . . . . . . . . . . . . . . . . 434.2.5 Análise do Problema 5 . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5 CONSIDERAÇÕES FINAIS 48

6 REFERÊNCIAS 49

8
1 INTRODUÇÃO
Um dos primeiros problemas que apareceram na história relacionados com as integraissão os problemas de quadratura, que nada mais é do quê processos para determinar áreas. Umdos problemas mais antigos enfrentados pelos gregos foi o da medição de superfícies a fim deencontrar suas áreas.
Segundo THOMAS (2010)
"... a integral possui muitas aplicações em estatística, economia, ciências e engen-haria. Ela nos permite calcular quantidades que vão desde probabilidades e médiasaté consumo de energia e forças que atuam contra as comportas de uma represa".
Notadamente existem vários métodos para se calcular analiticamente integrais definidassimples, a exemplo de métodos de substituição, partes e trigonométricas, além disso, existemvárias tabelas com fórmulas de aplicação nas mais diversas situações polinomiais com integrais.
Em contraste com a dificuldade se calcular analiticamente uma integral, o cálculo numéricopode ser realizado de forma relativamente simples. Os métodos de integração numérica per-mitem calcular o valor aproximado de uma integral definida sem conhecer uma expressãoanalítica para a sua primitiva. Quando analisamos o aspecto numérico, e sua implementaçãocomputacional, os métodos analíticos perdem espaço para os métodos de integração numérica,que generalizam muitas situações, apresentando estratégias que se encaixam na grande maioriados casos.
Além disso, segundo CAMPOS (2010), temos pelo menos duas situações em que deve-mos aplicar métodos numéricos para integração.
"Quando a forma analítica de se obter a integral de uma função f (x) for de difícilobtenção ou em casos em que se conheçam apenas valores discretos desta função,se faz necessário a utilização de métodos numéricos para avaliar a integral de f (x)".
1.1 JUSTIFICATIVA
De acordo com os comentários acima, fica evidente a importância de se estudar métodospara a resolução de integrais definidas, pois, além de seu interesse teórico inerente que pode servisto em integrais de difícil resolução analítica, ainda possui uma vasta aplicação prática eminúmeras áreas correlatas.
Diante disso, o presente trabalho apresenta uma descrição e análise comparativa acercados principais métodos de aplicação numérica existentes na literatura.

9
1.2 OBJETIVOS
A resolução de tais sistemas é o objeto de estudo do trabalho ora proposto, utilizando-sede métodos e técnicas já consagradas pela literatura. A sistematização na obtenção de soluçõesnos fornece meios de tornar o processo mais automático no que tange a sua aplicação. Dessaforma temos os seguintes objetivos.
1.2.1 Objetivo geral
Efetuar uma revisão bibliográfica sobre alguns métodos para integração numérica exis-tentes na literatura e realizar uma análise comparativa dos mesmos em termos dos principaisaspectos que os caracteriza.
1.2.2 Objetivos específicos
• Analisar os aspectos teóricos e práticos referentes às fórmulas de Newton-Cotes em suaformulação tradicional.
• Estudar aplicações das Regras do Trapézio, 13 de Simpson e 3
8 de Simpson para as fórmu-las de Newton-Cotes
• Analisar os aspectos teóricos e práticos referentes a aplicação da definição de integraldefinida em seu aspecto numérico, mais notadamente a integral de Riemmann.
• Fazer um comparativo analítico dos métodos na solução de alguns problemas de teste.
1.2.3 Metodologia
Dessa forma, o presente trabalho foi desenvolvido com base em uma pesquisa exclusi-vamente bibliográfica sobre a temática aboradada, baseada em literaturas específicas da área,caracaterizada, dessa forma, por Silva;Menezes(2001) como sendo uma pesquisa bibliográficacujo objetivo é obter conhecimento e entendimento sobre o assunto ora estudado.
Com base nesses preceitos, o presente trabalho está organizado de acordo com a seguinteformação metodológica. No capítulo 1 temos a organização metodológica, justificativas e ob-jetivos do estudo. No capítulo 2 apresentaremos a fundamentação teórica matemática que darásuporte aos métodos estudados. Já no capítulo 3, descreveremos os métodos numéricos para in-tegração numérica, fórmulas de Newton-Cotes, que são a regra dos trapézios, regra 1
3 de Simp-son e regra 3
8 de Simpson. No capítulo 4 ilustramos o funcionamento e a aplicação numéricados métodos estudados através de exemplos. E finalmente no capítulo 5 apresentaremos asconclusões deste trabalho.

10
2 UMA BREVE REVISÃO SOBRE INTEGRAIS
2.1 FUNÇÕES
Nas mais diversas áreas utilizam-se funções para a compreensão de fenômenos e res-olução de problemas. Funções são fundamentais para o estudo do cálculo, pois descrevemaspectos do mundo real em termos matemáticos.
Para FLEMMING,
"Sejam A e B subconjunto de IR. Uma função f : A → B é uma lei ou regra quea cada elemento de A faz corresponder um único elemento de B. O conjunto A échamado domínio de f e é denotado por D( f ). B é chamado de contradomínio oucampo de valores de f "
Uma forma de representar visualmente o comportamento de uma função é atráves de seugráfico. Para Flemming, "seja f uma função. O gráfico de f é conjunto de todos os pontos(x, f (x)) de um plano coordenado, onde x pertence ao domínio de f ".
Para se determinar um gráfico de uma função, assinalamos uma série de pontos dentro deum plano cartesiano, fazendo uma tabela que nos dá as coordenadas.
2.2 INTEGRAL DE RIEMANN
Utilizando conceitos da geometria euclidiana, é possível calcular a área de regiões limi-tadas por segmentos como triângulos, retangulos etc.
Contudo, não é difícil encontrar a área de uma região com lados curvos. Temos uma idéiaintuitiva de qual é a área de uma região, mas parte do problema da área é tornar precisa essaidéia intuitiva, dando uma definição exata da área.
Para GUIDORIZZI (2008), o método de Riemann consiste em produzir sucessões re-finando a quantidade de retângulos de forma que, em alguns casos, pode-se descobrir umaexpressão cujo limite é possível calcular.
Diante disso, a soma de Riemann consiste em dividir o intervalo [a,b] em subintervalosretangulares suficientemente pequenos para que neles f (x) possa ser considerada constante comuma boa aproximação. Em cada subintervalo pode-se calcular, aproximadamente, a área sobo gráfico, calculando a área do pequeno retângulo que fica determinado quando supomos f (x)
constante. Nesse ponto, a área procurada no intervalo [a,b] será, aproximadamente, a soma dasáreas destes retângulos.

11
As definições e conceitos a seguir são bem conhecidos e fundamentados no campo matemáticoe amplamente vista nos cursos de cáculo de nível superior, cuja abordagem adotada no presentetrabalho pauta-se na estrutura adotada por THOMAS (2010), GUIDORIZZI (2008) e STEW-ART (2010).
2.2.1 Partição de um intervalo
Dado um intervalo [a,b], uma partição deste intervalo é um conjunto finito P= {x0,x1, ...,xn},
onde a = x0 < x1 < x2 < ... < xn = b.
Em outras palavras, uma partição P de [a,b] divide o intervalo [a,b] em n intervalos [xi−1,xi],
com i = 1,2, ...,n, como descrito na Figura 1:
Figura 1 - Partição de um intervalo [a,b] em n pontos
qa = x0
qx1
qx2
qx3
... qxi
... qxn−1
qb = xn
A amplitude do intervalo [xi−1,xi] será indicada por ∆xi = xi − xi−1. Assim:
∆x1 = x1 − x0,∆x2 = x2 − x1, ... (1)
Cada amplitude do intervalo, não necessariamente, terá valores iguais. O maior deles denomina-
se amplitude da partição P e é denotada max∆xi.
2.2.2 Soma de Riemann
Sejam f uma função definida em [a,b] e P : a = x0 < x1 < x2 < ... < xn = b uma partição
de [a,b], para cada índice i(i = 1,2, ...,n),escolhe-se arbitrariamente um número ci dentro do
intervalo [xi−1,xi], conforme ilustrado na figura abaixo.
Figura 2 - Escolha arbitrária de um número ci, dentro de cada intervalo [xi−1,xi]
qa = x0
?c1 qx1
?c2 qx2
?c3 qx3
... qxi
... qxn−1
qb = xn
?cn

12
O número
A =n
∑i=1
f (ci)∆xi (2)
denomina-se soma de Riemann de f em relação à P e ci.
Gráfico 1 - Soma de Riemann
Fonte:Wikipedia, 2012
Nesse ponto, dois aspectos podem ser observados:
• Se f (ci)> 0 então f (ci)∆xi será a área do retângulo Ri determinado pelas retas x = xi −1, x = xi,
y = 0 e y = f (ci).
• Se f (ci)< 0, a área do retângulo será − f (ci)∆xi
Geometricamente, pode-se interpretar a soma de Riemann como a diferença entre a soma das áreas
dos retângulos Ri que estão acima do eixo x cujo valor é positivo e a soma das áreas dos que estão abaixo
do eixo x que possuem valores negativos.
2.2.3 Integral de Riemman: Definição
Sejam f uma função definida em [a,b] e L um número real. Dizemos que ∑ni=1 f (ci)∆xi tende a L
quando max∆xi → 0, e escrevemos:
limmax∆xi→0
n
∑i=1
f (ci)∆xi = L (3)
Se, para todo ε > 0 dado, existir um δ > 0 que só dependa de ε , mas não da escolha em particular
dos Ci j tal que:n
∑i=1
f (ci)∆xi −L < ε (4)
para toda partição P de [a,b] com max∆xi < δ

13
Tal número L, quando existe, denomina-se integral de Riemann de f em [a,b] e indica-se por∫ b
a f (x)dx.
Então, por definição: ∫ b
af (x)dx = lim
max∆xi→0
n
∑i=1
f (ci)∆xi (5)
Gráfico 2 - Soma de Riemann com diferente número de subintervalos
Fonte:Wikipedia, 2012
Se∫ b
a f (x)dx existe, dizemos que f é integrável segundo Riemann em [a,b]. É comum referir-se a∫ ba f (x)dx como integral definida de f em [a,b].
Nesse ponto, por definição:
∫ a
af (x)dx = 0
∫ a
bf (x)dx =−
∫ b
af (x)dx a<b (6)
2.2.4 Propriedades da Integral
As propriedades descritas a seguir, constam em GUIDORIZZI.
Teorema 2.1. Sejam f ,g integráveis em [a,b] e k uma constante. Então:
1. f +g integrável em [a,b] e∫ b
a [ f (x)+g(x)]dx =∫ b
a f (x)dx+∫ b
a g(x)dx
2. k. f integrável em [a,b] e∫ b
a [k. f (x)]dx = k.∫ b
a f (x)dx
3. Se c ∈]a,b[ e f é integrável em [a,c] e em [c,b] então∫ b
a f (x)dx =∫ c
a f (x)dx+∫ b
c f (x)dx
14
2.2.5 1o Teorema Fundamental do Cálculo
Se f for integrável em [a,b] e se F for uma primitiva em f em [a,b], então:
∫ ba f (x)dx = F(b)−F(a) (7)
2.3 METÓDOS DE INTEGRAÇÃO ANALÍTICA
Segundo THOMAS (2010), "uma integral definida é um número que definimos encontrando o
limite das somas de Riemann associadas a partições de um intervalo fechado finito cujas normas tendem
a zero". Segundo o teorema fundamental do cálculo, pode-se calcular facilmente uma integral definida
de uma função contínua encontrando uma primitiva dessa função. Em geral, é mais difícil encontrar
primitivas do que derivadas. No entanto, vale à pena aprender técnicas para calculá-las.
Entre as técnicas existentes para o cálculo de primitivas, pode-se citar a regra da substituição,
integração por partes, integração de funções racionais por frações parciais, integrais trigonométricas,
entre outros tipos de integração.
2.3.1 Regra da Substituição
De acordo com THOMAS (2010), se u = g(x) é uma função derivável cuja imagem é um intervalo
I e f é contínua em I, então
∫f (g(x))g′dx =
∫f (u)du (8)
A regra é verdadeira porque, segundo a regra da cadeia, F(g(x)) será uma primitiva de f (g(x))g′(x)
sempre que F for uma primitiva de f :ddx
F(g(g)) ·g′(x)
= f (g(x)) ·g′(x) (9)
se fizermos a substituição u = g(x)
∫f (g(x))g′dx =
∫ ddx
F(g(x))dx
= F(g(x))+C
F(u)+C∫F ′(u)du∫f (u)du

15
A regra da substituição fornece o seguinte método para calcular a integral∫f (g(x))g′(x)dx
quando f e g′ são funções contínuas:
• Substitua u = g(x) e du = g′(x) para obter a integral∫f (u)du
• Integre em relação a u
• Troque o resultado u por g(x) no resultado
2.3.2 Integração por Partes
Segundo THOMAS (2010), uma vez que
∫xdx =
12
x2 +C (10)
é evidente que ∫x · xdx ̸=
∫xdx ·
∫xdx
Em outras palavras, a integral de um produto geralmente não é o produto das integrais individuais.
Integração por partes é uma técnica para simplificar integrais da forma∫f (x)g(x)dx (11)
Na qual f pode ser derivada repetidamente e g pode ser integrada repetidamente sem dificuldade.
Se f e g são funções deriváveis de x, a regra da cadeia diz que
ddx
[ f (g(x))] = f ′(x)g(x)+ f (x)g′(x) (12)
Em termos de integrais indefinidas, essa equação se torna∫ ddx
[ f (x)g(x)]dx =∫[ f ′(x)g(x)+ f (x)g′(x)]dx
ou ∫ ddx
[ f (x)g(x)]dx =∫
f ′(x)g(x)dx+∫
f (x)g′(x)dx (13)
Rearranjando os termos da equação (11), temos∫f (x)g′(x)dx =
∫ ddx
[ f (x)g(x)]dx−∫
f ′(x)g(x)dx (14)

16
o que leva à fórmula da integração por partes.∫f (x)g′(x)dx = f (x)g(x)−
∫f ′(x)g(x)dx (15)

17
3 INTEGRAÇÃO NUMÉRICA
3.1 CONSIDERAÇÕES INICIAIS
Segundo SPERANDIO (2006), no cálculo diferencial e integral estuda-se o conceito de integral
definida de Riemann, como calculá-la por métodos analíticos e o resultado alcançado significa área ou
volumes de figuras geométricas, dependendo do tipo de integral.
De fato, o conceito de integral aparece, de fato, embrionariamente nos trabalhos de Arquimedes,
ao utilizar o método de exaustão criado por Eudóxio (408-355 a.C.), no cálculo de comprimento de
curvas, áreas e volumes de figuras geométricas.
Ainda de acordo com SPERANDIO (2006), Newton (1642-1727) e Leibnitz (1646-1716), atual-
mente tidos como os inventores do cálculo diferencial e integral, completaram o método de Arquimedes,
lançando as bases do cálculo integral. O conceito de integral foi constituído em bases rigorosas com
os trabalhos de Cauchy (1789-1857) e Riemann (1826-1866), tornando-se um utensílio poderoso na
resolução de inúmeros problemas.
Se f (x) é uma função contínua em um intervalo fechado [a,b], então pelo teorema fundamental
do cálculo temos:
Teorema 3.1. Se f for integrável em [a,b] e se F for uma primitiva de f em [a,b], então:
∫ b
af (x)dx = F(b)−F(a) (16)
Nesse ponto, de acordo com LARS GARDING (2008), em determinadas situações, integrais são
difíceis, ou mesmo impossíveis de se resolver analiticamente. Geralmente em problemas envolvendo o
cálculo de integrais não se conhece a expressão analítica da função integrando, somente os valores dessa
função.
De acordo com RUGGIERO (1996), existem casos onde não é fácil expressar a primitiva de sua
função por meio de combinações finitas de funções elementares.
Diante disso, a integração numérica é uma técnica comumente empregada na determinação de
uma integral definida, cuja função é disponível ou não, ou até mesmo não possui uma solução analítica.
Os métodos de integração numérica permitem calcular o valor aproximado de uma integral definida sem
conhecer uma expressão analítica para a sua primitiva.
Para SPERANDIO (2006), Há ainda o caso em que o valor de f (x) é conhecido em apenas alguns
pontos, em um intervalo [a,b]. Como não conhecemos a expressão analítica de f (x), não temos como
calcular∫ b
a f (x)dx, como por exemplo dados empíricos ou experimentais.

18
As formulas de integração numérica também são chamadas quadraturas numéricas devido a razões
históricas, pois foi com o problema da quadratura do círculo que Arquimedes fez os primeiros cálculos
usando a noção de integral.
Segundo SPERANDIO (2006), a idéia fundamental desses métodos de integração numérica é a
substituição da função integrando por outra função que seja de fácil manuseio, e resolve-se a integral com
essa função, obtendo-se assim fórmulas de integração numérica que envolve apenas uma combinação de
valores da função integrando. Os polinomios interpoladores podem ser usados para tais aproximações.
Com isso o problema fica resolvido pela integral de polinômios, o que é trivial de se fazer. Com tal
raciocínio podemos deduzir fórmulas para aproximar∫ b
a f (x)dx.
3.2 INTERPOLAÇÃO POLINOMIAL
Em várias situações práticas, trabalhamos com funções que apresentam um grau de dificuldade
mais elevado na hora de avaliar, derivar, ou ainda, integrar esta função em um intervalo [a,b]. Em outros
casos, dispomos apenas de dados empíricos obtidos de forma discreta e dispomos apenas de tabelamento
para esta função.
Então, surge uma pergunta: Como devemos proceder para encontrar pontos que não estão associ-
ados a um valor de f (x) no tabelamento? A resposta é simples: aproximando estas funções por outras de
manipulação mais fácil, tais como polinômios.
Para CAMPOS (2010), a necessidade de obter um valor mediador que não consta de uma tabela
ocorre frequentemente. Dados experimentais, tabelas estatísticas e de funções complexas são exemplos
desta situação.
FRANCO (2006), fala que a aproximação de funções por polinômios é uma das ideias mais antigas
da análise numérica, e ainda uma das mais usadas. É bastante fácil entender por que razão isso acontece.
Os polinômios são facilmente computáveis, suas derivadas e integrais são novamente polinômios, suas
raízes podem ser encontradas com relativa facilidade. Portanto, é vantajoso substituir quando a função
em estudo tem uma expressão tal que operações como a diferenciação e a integração são de difíceis
resolução analítica (ou mesmo impossíveis) de serem realizada, por um polinômio que a represente.
Além disso, temos o teorema de Weierstrass que afirma: "Toda função contínua pode ser arbitrariamente
aproximada por um polinômio".
Segundo ARENALES (2008), a aproximação de uma função de difícil resolução analítica de uma
variável real por outras funções mais simples, de modo que operações em geral sejam realizadas com
mais facilidade. Esta aproximação possui várias aplicações na resolução de problemas complexos, como
integração de funções, equações diferenciais, sistemas não lineares, entre outros.
De acordo com CAMPOS (2010), existem vários métodos para construir um polinômio inter-
polador a partir de um conjunto de pares (x,y), alguns métodos são a interpolação linear, polinômios

19
de Lagrange e polinômio de Newton (operador de diferenças divididas). O esquema mais simples, em
termos conceituais, envolve a solução de um sistema de equações lineares. .
Tanto a interpolação liner como a quadrática que veremos nesse trabalho são casos particulares da
interpolação de Lagrange.
Considere uma função f (x), definida em x0,x1, ...,xn,(n+1) pontos distintos de um intervalo [a,b]
e seja yi = f (xi).
A interpolação consiste em se obter uma função g(x) tal que:
g(x0) = f (x0)
g(x1) = f (x1)
g(x2) = f (x2)
...
g(xn) = f (xn)
ou seja, interpolar a função f (x) consiste em aproximar esta função por um polinômio g(x) de
grau menor ou igual a n. tal que este coincida com a função f (x) nestes pontos.
O teorema que dá suporte a este tipo de interpolação e garante a existência e a unicidade de tal
polinômio, é enunciado a seguir:
Teorema 3.2. Seja f (x) definida em x0,x1, ...,xn,(n+1) pontos distintos de um intervalo [a,b]. Então,
existe um único polinômio de grau menor ou igual a n, tal que g(xi) = f (xi) = yi, i = 1, ...,n.
Graficamente, a ilustração de um polinômio g(x) interpolado a uma função f (x) é dado a seguir:

20
Gráfico 3 - Polinômio Interpolador
Fonte:O baricentro da mente, 2012
Observe que, embora o polinômio interpolador g(x) coincida com a função nos pontos de inter-
polação x1, ...x4, nos demais pontos espera-se que g(x)∼= f (x), ou seja, estimamos f (x) pelo polinômio
interpolador e cometemos um erro nesta aproximação, dado por:
E(x) = f (x)−g(x) (17)
Genericamente pretendemos determinar o polinômio interpolador de grau menor ou igual a n
sendo conhecidos (n+ 1) pontos. Ou seja, pretende-se achar o polinômio Pn(x) que possui o seguinte
formato:
Pn(x) = anxn +an−1xn−1 + ...+a2x2 +a1x+a0 =n
∑i=0
aixi (18)
Onde Pn tem no máximo grau n,an,an−1, ...,a2,a1,a0 são determinados a custa da resolução do
sistema.
Pn(x0) = y0
Pn(x1) = y1
...
Pn(xn) = yn
⇐⇒
anxn0 +an−1xn−1
0 + ...+a2x20 +a1x0 +a0 = y0
anxn1 +an−1xn−1
1 + ...+a2x21 +a1x1 +a0 = y1
...
anxnn +an−1xn−1
n + ...+a2x2n +a1xn +a0 = yn
Cuja matriz é:
A =
xn
0 xn−10 ... x0 1
xn xn−11 ... x1 1
... ... ... ... ...
xnn xn−1
n ... xn 1
.

21
Prova-se que a solução do sistema anterior é única se det(A) ̸= 0, ou seja tanto as linhas como as
colunas da matriz A devem ser linearmente independentes.
3.2.1 Interpolação de Lagrange
Sejam x0,x1, ...,xn(n+1) pontos distintos e yi = f (xi), i = 0, ...,n e seja Pn(x) o polinômio de grau
menor que n que interpola f em x0, ...xn. Podemos representar Pn(x) na forma:
Pn(xi) = y0L0(xi)+ y1L1(xi)+ ...+ ynLn(xi) = yi (19)
onde os polinômios Lk(x) são de grau n.
Para que f (xi) = yi = P(xi) é suficiente que :
Lk(xi) =
{0 se k ̸= i
1 se k = 1
}
Por isso, definimos Lk(x) por:
Lk(x) =(x− x0)(x− x1)...(x− xk−1)(x− xk+1)...(x− xn)
(xk − x0)(xk − x1)...(xk − xk−1)(xk − xk+1)...(xk − xn)(20)
ou ainda:
Lk(x) =n
∏j=0j ̸=k
(x− x j)
(xk − x j)
e a forma de Lagrange para o polinômio interpolador é definida por:
Pn(x) =n
∑k=0
ykLk(x) (21)
A interpolação linear é um caso bem particular da interpolação, onde temos uma função f (x)
definida em dois pontos x0 e x1.
Neste caso, o polinômio interpolador tem grau igual a 1 (ou seja, uma reta), é dada por:
P1(x) = y0L0(x)+ y1L1(x) (22)
Aplicando diretamente a fórmula do polinômio interpolador linear de Lagrange, temos, apartir de
dados conhecidos em um tabelamento qualquer que:
L0(x) =(x− x1)
(x0 − x1)(23)
L1(x) =(x− x0)
(x1 − x0)(24)

22
assim:
P1(x) = y0
(x− x1
x0 − x1
)+ y1
(x− x0
x1 − x0
)(25)
Observe que, quanto maior o grau do polinômio utilizado, maior é a suavidade do mesmo. Abaixo
temos dois gráficos que fazem interpolação de grau 1 para cada subintervalo e de grau 6, utilizando todos
os pontos.
Gráfico 4 - Interpolação Linear
Fonte:Wikipedia, 2012
Gráfico 5 - Interpolação por Lagrange
Fonte:Wikipedia, 2012

23
3.3 FÓRMULAS DE NEWTON-COTES
Segundo RUGGIERRO (1996), uma condição necessária para o desenvolvimento das fórmulas de
Newton-Cotes, é que o polinômio interpolador aproxime f (x) em ponto igualmente espaçados. Dessa
forma, considerando a partição do intervalo [a,b] em subintervalos de comprimento h, [xi,xi+1], i =
0,1, ...,n−1, temos:
xi+1 − xi = h =(b−a)
n(26)
Ainda de acordo com o mesmo autor, as fórmulas fechadas de Newton-Cotes são fórmulas de
integração do tipo x0 = a,xn = b e
∫ b
af (x)dx =
∫ xn
x0
f (x)dx = A0 f (x0)+ · · ·+An f (xn) =n
∑i=0
Ai f (xi) (27)
sendo os coeficientes Ai determinados de acordo com o grau do polinômio aproximado.
Desenvolveremos logo mais algumas das fórmulas fechadas de Newton-Cotes, a regra dos Trapézios,
a regra 1/3 de Simpson e 3/8 de Simpson.
3.3.1 Regra dos Trapézios
De acordo com ARENALES (2008), a ideia fundamental da regra dos trapézios consiste em aprox-
imar o valor da função contínua de f (x) no intervalo [a,b] por uma função de primeira ordem, isto, ge-
ometricamente, é equivalente a aproximar uma curva qualquer por uma reta. Desta forma, a área sob a
função f (x), que é equivalente à integral dessa função, é aproximada pela área do trapézio cuja largura
é igual a (b− a), e as bases maior e menor são representados pelos valores de f (a) e f (b), conforme
ilustrado no Gráfico a seguir:
Gráfico 6 - Regra do Trapézio
Fonte:Wikipedia, 2012

24
O Gráfico 6 nos mostra a aproximação de uma curva por uma reta no intervalo [a,b], dessa forma
a área do gráfico se assemelha a área de um trapézio, com isso fica mais fácil de se chegar a um valor
aproximado da área, já que o cálculo da área de um trapézio é feita da seguinte forma:
Atrapzio =(B+b)h
2(28)
onde a altura h = b−a, e as bases são f (a) e f (b).
Observe que ao utilizarmos a regra do trapézio cometemos um erro no cálculo da integral, pois
quando fazemos a aproximação da curva por uma reta deixamos de considerar alguns espaços entre a
curva e reta aproximada.
Utilizando a fórmula de Lagrange para expressar P1(x), que interpola f (x) em x0 e x1, temos:
∫ b
af (x)dx ≃
∫ x1
x0
P1(x)dx
∫ x1
x0
[x− x1
−hf (x0)+
x− x0
hf (x1)]dx
∫ x1
x0
x− x1
−hf (x0)dx+
∫ x1
x0
x− x0
hf (x1)dx
−1h
∫ x1
x0
(x− x1) f (x0)dx+1h
∫ x1
x0
(x− x0) f (x1)dx
− f (x0)
h
∫ x1
x0
(x− x1)dx+f (x1)
h
∫ x1
x0
(x− x0)dx
Onde u = x− x1 e du = dx e para outra integral u = x− x0 e du = dx logo
− f (x0)
h
∫ x1
x0
udu+f (x1)
h
∫ x1
x0
udu
f (x0)
h[u2
2]x1x0+
f (x1)
h[u2
2]x1x0
− f (x0)
h[(x− x1)
2
2]x1x0+
f (x1)
h[(x− x0)
2
2]x1x0
substituindo nos intervalos
− f (x0)
h[(x1 − x1)
2
2]+
f (x1)
h[(x1 − x0)
2
2]−
(− f (x0)
h[(x0 − x1)
2
2]+
f (x1)
h[[(x0 − x0)
2
2]
)fazendo (x1 − x0) = h
f (x1)
h
(h2
2
)−(− f (x0)
h[−h2
2]
)

25
f (x1)
h
(h2
2
)−(− f (x0)h
2
)f (x1)h
2+
f (x0)h2
h2[ f (x0)+ f (x1)] (29)
Dessa forma,
∫ b
af (x)dx ∼=
∫ x1
x0
P1(x)dx ∼=h2[ f (a)+ f (b)] (30)
3.3.2 Regra dos Trapézios Generalizada
Segundo BURDEN (2008), a regra dos trapézios generalizada consiste na aplicação sucessiva da
regra dos trapézios, considerando a subdivisão do intervalo em n subintervalos iguais.
Subdividimos o intervalo [a,b], aproximando f por uma reta em cada um deles. Assim, temos
que: ∫ xn
x0
f (x)dx ≃ h2[ f (x0)+ f (x1)]+
h2[ f (x1)+ f (x2)]+ ...+
h2[ f (xn−1)+ f (xn)]
Colocando h2 em evidência e observando que a aresta da base é comum a dois trapézios consecu-
tivos, com exceção da primeira e última aresta, chegamos a:
h2[ f (x0)+2 f (x1)+2 f (x2)+ ...+2 f (xn−1)+ f (xn)] (31)
Gráfico 7 - Regra do Trapézio Generalizada
Fonte:Wikipedia, 2012

26
O gráfico nos mostra que para cada partição do intervalo [a,b] acontece uma aproximação de uma
função linear. Isto faz considerar a função como linear em cada subintervalo, sendo a área abaixo da
função calculada como aproximação da área do trapézio.
3.3.3 Regra 1/3 de Simpson
Thomas Simpson (1710-1761) foi um matemático autodidata que se sustentou quando jovem como
tecelão. Seu interesse principal foi a teoria da probabilidade, embora em 1750 tenha publicado um livro
de cálculo com dois volumes intitulado The Doctrine and Application of Fluxions.
Para FRANCO (2006), a Regra de Simpson consiste na aproximação da função contínua f (x)
no intervalo [a,b] por uma função de segunda ordem, ou seja, na aproximação de uma curva por uma
parábola.
Segundo BURDEN (2008), a regra 1/3 de Simpson resulta da integração em [a,b] do polinômio
de Lagrange de segundo grau com nós x0 = a, x2 = b e x1 = a+h, em que h = (b−a)2 , conforme ilustrado
na figura a seguir:
Gráfico 8 - Regra 1/3 de Simpson
Fonte:Wikipedia, 2012
A fórmula para a integral tem a forma:
∫ b
af (x)dx ∼=
h3[ f (x0)+4 f (x1)+ f (x2]
onde h =△x = x2 − x1 = x1 − x0
na qual n é par (correspondendo a um número par de intervalos de integração) ou, equivalente-
mente, a regra 1/3 de Simpson só pode ser aplicada para um número ímpar de pontos xi, f (xi).

27
Dessa forma, pela abordagem citada, calcular a integral neste intervalo corresponde a aproximar
o cálculo da integral do polinômio de segundo grau que interpole os pontos da seguinte forma:
∫ x0+2h
x0
f (x)dx ≈∫ x0+2h
x0
P2(x)dx
x2 = h,x1 = h Y0 = f (x0),Y1 = f (x1),Y2 = f (x2)
Escrevendo o polinômio de segundo grau através da fórmula de Lagrange, temos:
P2(x) = Y0(x− x1)
(x0 − x1)
(x− x2)
(x0 − x2)+Y1
(x− x0)
(x1 − x0)
(x− x2)
(x1 − x2)+Y2
(x− x0)
(x2 − x0)
(x− x1)
(x2 − x1)
fazendo z = x−x0x1−x0
= x−x0h temos:
P2(x) = Y0x− (x0 +h)
−hx− (x0 +2h)
−2h+Y1z
x− (x0 +2h)−h
+Y2x− x0
2hx− (x0 +h)
h
P2(Z) = Y0
(x− x0
−h+
−h−h
)(x− x0
−2h+
−2h−2h
)+Y1z
(x− x0
−h+
−2h−2h
)+Y2
z2
(x− x0
h−1
)P2(z) = Y0(−z+1)(− z
2+1)+Y1z(−z+2)+Y2
z2(z−1)
como z = x−x0h , logo dz = dx
h , então dx = hdz.
∫ x0+2h
x0
P2(x)dx =∫ 2
0P2(z)hdz
∫ 2
0[Y0
(z2
2− z− z
2+1
)+Y1
(−z2 +2z
)+Y2
(z2
2− z
2
)]hdz
h[Y0
z3
6
∣∣∣∣∣2
0
− z2
2
∣∣∣∣∣2
0
− z2
4
∣∣∣∣∣2
0
+Y1
(−z3
3
)∣∣∣∣∣2
0
+2z2
2
∣∣∣∣∣2
0
+Y2
z3
6
∣∣∣∣∣2
0
− z2
4
∣∣∣∣∣2
0
]
h[Y0
(86− 4
2− 4
4+2
)+Y1
(−8
3+4
)+Y2
(86−1
)]
h[Y0
(13−1
)+Y1
43+Y2
13]
h3[Y0 +4Y1 +Y2]
De acordo com BURDEN (2008), a maior precisão da regra 1/3 de Simpson, em relação à regra
dos trapézios, é intuitivamente explicada pelo fato de que a regra 1/3 de Simpson inclui um cálculo de
ponto-médio, que oferece um melhor equilíbrio à aproximação.
3.3.4 Regra 38 de Simpson
Para ARENALES (2008), a regra de 38 se destaca das demais, pois sua aproximação se dá através
de um polinômio de terceiro grau, fazendo com que a eficiência seja maior ainda, pois o polinômio vai se

28
ajustando a curva, fazendo assim com que não aconteça tantos espaços vazios entre a curva e o polinômio
de grau três . Por outro lado é necessário que o número de subintervalos seja ímpar.
Para FRANCO (2006), de maneira análoga às anteriores, a regra 38 de Simpson é obtida aproximando-
se a função f (x) pelo polinômio interpolador de terceiro grau. Dessa forma, através da medodologia de
Lagrange:
f (x)∼= b0 p0(x)+b1 p1(x)+b2 p2(x)+b3 p3(x)
onde os termos pi(x) são:
p0(x) = (x− x1)(x− x2)(x− x3)
p1(x) = (x− x0)(x− x2)(x− x3)
p2(x) = (x− x0)(x− x1)(x− x3)
p3(x) = (x− x0)(x− x1)(x− x2)
e os termos bi são:
b0 =f (x0)
(x0 − x1)(x0 − x2)(x0 − x3)
b1 =f (x1)
(x1 − x0)(xi − x2)(x1 − x3)
b2 =f (x2)
(x2 − x0)(x2 − x1)(x2 − x3)
b3 =f (x3)
(x3 − x0)(x3 − x1)(x3 − x2)
Assim:
∫ b
af (x)dx ∼= b0
∫ b
ap0(x)dx+b1
∫ b
ap1(x)dx+b2
∫ b
ap2(x)dx+b3
∫ b
ap3(x)dx (32)
Como utiliza-se um polinômio de terceiro grau, então são necessários quatro pontos a serem in-
terpolados:
x0 = a
x1 = x0 +h
x2 = x0 +2h
x3 = x0 +3h = b
Resolvendo a integral acima e substituindo os termos dados pelas equações mostradas anterior-
mente, então fica-se com a seguinte fórmula geral para a regra 38 de Simpson:
∫ x3
x0
f (x)dx ∼=3h8[ f (x0)+3 f (x2)+ f (x3)]

29
4 RESULTADOS E DISCUSSÕES
4.1 MÉTODOS NUMÉRICOS
Segundo CAMPOS FILHO (2010), os algoritmos são importantes, pois especificam uma sequên-
cia de passos lógicos para que o computador execute qualquer tarefa, tendo em vista que o mesmo só
realiza o que foi programado.
Assim, serão mostrados a seguir os algoritmos de integração numérica de funções de uma variável,
pelo ponto da esquerda, pondo médio e ponto da direita, tendo todos esses citados como base a definição
de Riemann, como também serão apresentados a regra do trapézio, regra 13 de Simpson e regra 3
8 de
Simpson.
Algoritmo 1
Soma de Riemann: Ponto à esquerda
declarea,b, (limites inferior e superior de integração)
n, (quantidade de subintervalos)
h, (incremento em x)
s, (somatório)
i, (variável auxiliar)
numéricodeclare f (x) função numérica
leia a, b, n
h=(b-a)/n
x=a:h:(b-h)
y = f (x)
I = h[somatrio(y)]
escreva Ifim
O algoritmo mostrado acima vem da definição de soma de Riemann, que consiste em fazer aprox-
imações usando os pontos iniciais de cada subintervalo. Como veremos no gráfico abaixo:

30
Gráfico 9 - Soma de Riemman - Ponto à Esquerda
Veja que esse método, ao ser utilizado com poucos subintervalos, deixa de considerar alguns
espaços entre a função f (x) e os retângulos gerados para a aproximação, e com isso a aproximação não
acontece de maneira eficiente. Para que se chegue a uma aproximação eficiente, devemos aumentar a
quantidade de subintervalos, fazendo com que tais espaços vazios tendem a zero.
Algoritmo 2
Soma de Riemann: Ponto médio
declarea,b, (limites inferior e superior de integração)
n, (quantidade de subintervalos)
h, (incremento em x)
s, (somatório)
i, (variável auxiliar)
numéricodeclare f (x) função numérica
leia a, b, n
h=(b-a)/n
x = (a+(h/2)) : h : (b− (h/2))
y = f (x)
I = h∗ [somatrio(y)]
escreva Ifim

31
O algoritmo do ponto médio também vem da definição de Soma de Rieman, porem tal algoritmo
leva em consideração à aproximação de cada subintervalo pelo ponto médio, como mostra o gráfico
abaixo:
Gráfico 10 - Soma de Riemman - Ponto médio
De acordo com o gráfico, notamos que o método leva em consideração pontos que não deveriam
ser levados e deixa de serem calculados pontos essenciais. Dessa forma, o método consegue fazer um
equilibro dessa função, já que as partes que faltam abaixo da curva podem ser preenchidas com os
pontos acima da curva, fazendo assim com que o ponto médio seja muito eficiente para esse tipo de
comportamento da função f (x).

32
Algoritmo 3
Soma de Riemann: Ponto à direita
declarea,b, (limites inferior e superior de integração)
n, (quantidade de subintervalos)
h, (incremento em x)
s, (somatório)
i, (variável auxiliar)
numéricodeclare f (x) função numérica
leia a, b, n
h = (b−a)/n
x = (a+h) : h : b
y = f (x)
I = h∗ [somatrio(y)]
escreva Ifim
Tal algoritmo vem da definição de Soma de Rienann, diferentes dos mostrados acima a aproxi-
mação acontece pegando o fim de cada subintervalo veja o gráfico:
Gráfico 11 - Soma de Riemman - Ponto à Direita
O gráfico mostra que o algoritmo satisfaz a função de pegar todos os pontos abaixo da curva,
porém acabam levando em conta até mesmo os pontos acima da curva, o que pode gerar o superdimen-
sionamento do valor da integral.

33
Algoritmo 4
Regra do Trapézio
declarea,b, (limites inferior e superior de integração)
n, (quantidade de subintervalos)
h, (incremento em x)
s, (somatório)
i, (variável auxiliar)
numéricodeclare f (x) função numérica
leia a, b, n
h = (b−a)/n
x = a
s = 0
para i de 1 até n-1 façax = x+h
s = s+2∗ f (x)
fim para s = f (a)+ s+ f (b)
I = (h/2)∗ s
escreva Ifim
O algoritmo mostrado acima aproxima a função f (x) pelo polinômio interpolador de grau um
sobre os pontos x0 = a e x1 = b.
Gráfico 12 - Regra dos Trapézios

34
Algoritmo 5
Regra 1/3 de Simpson
declarea,b, (limites inferior e superior de integração)
n, (quantidade de subintervalos)
h, (incremento em x)
s, (somatório)
i, (variável auxiliar)
numéricodeclare f (x) função numérica
leia a, b, n n deverá ser par
h = (b−a)/n
x = a
s = 0
para i de (n-1)/2 façax = x+h
s = s+4∗ f (x)
x = x+h
s = s+2∗ f (x)
fim parax = x+h
s = f (a)+ s+4∗ f (x)+ f (b)
I = h/3∗ s
escreva Ifim
O algoritmo nos mostra que a regra 13 de Simpson necessita de três pontos, logo o subintervalo
que aplicaremos a fórmula será da forma [xk,xk+2] o que implica que n deve ser um número par.

35
Algoritmo 6
Regra 3/8 de Simpson
declarea,b, (limites inferior e superior de integração)
n, (quantidade de subintervalos)
h, (incremento em x)
s, (somatório)
i, (variável auxiliar)
numéricodeclare f (x) função numérica
leia a, b, n n deverá ser múltiplo de 3
h = (b−a)/n
x = a
s = 0
para i de (n-3)/3 façax = x+h
s = s+3∗ f (x)
x = x+h
s = s+3∗ f (x)
x = x+h
s = s+2∗ f (x)
fim parax = x+h
s = s+3∗ f (x)
x = x+h
s = f (a)+ s+3∗ f (x)+ f (b)
I = 3h/8∗ s
escreva Ifim
Tais métodos computacionais, servem para que a resolução das integrais sejam feitas de maneira
mais rápida, chegando a um valor aproximado muito eficaz. Esses métodos conseguem generalizar os
problemas, fazendo com que os métodos analiticos sejam pouco usado, com todos esses diferencias os
métodos computacionais ganham grande vantagem na obtenção dos resultados.
4.2 EXPERIMENTOS NUMÉRICOS
A seguir iremos apresentar solução analítica e numérica dos exemplos encontrados em CAMPOS
(2010), que considerou as seguintes integrais:
Problema 1 -∫ 2
0 x2dx
Probelma 2 -∫ 2
0 x4dx

36
Problema 3 -∫ 2
01
(x+1)dx
Problema 4 -∫ 2
0√
x+1dx
Problema 5 -∫ 2
0 sen(x)
Nessa análise, serão considerados os métodos da Soma de Riemann (Ponto a Esquerda S1, Ponto
médio S2 e Ponto a Direita S3), do Trapézio T1 e 1/3 de Simpson SP1.
Para todos os métodos citados acima, foram usados n( número de subintervalo)= 10, 100 e 1000.
Onde todos os resultados numericos foram obtidos utilizando o SCILAB 5.3.2 como ferrementa.
4.2.1 Análise do Problema 1
Considere a integral definida a ser resolvida:
∫ 2
0x2dx
Cujo o gráfico é:
Gráfico 13 - Função x2
A solução exata da integral é: ∫ 2
0x2dx
=x3
3
∣∣∣∣∣2
0
substituindo no intervalo temos:
=23
3− 03
3= 2,66666
37
.
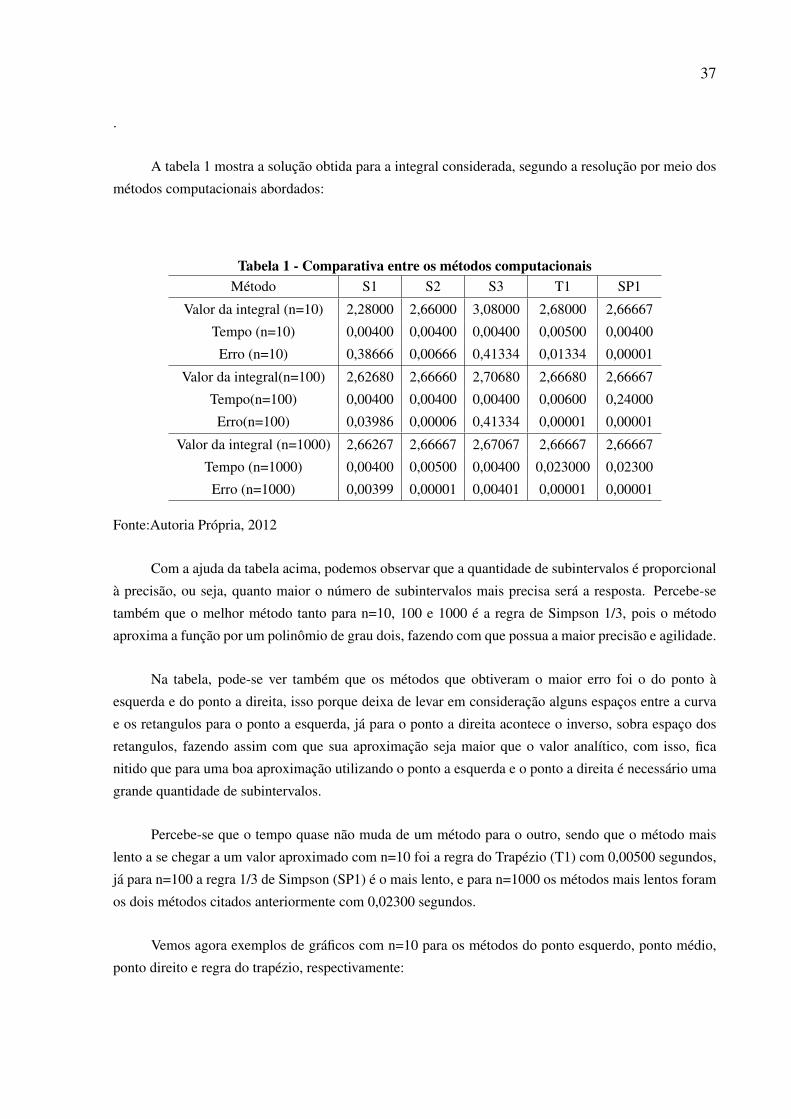
A tabela 1 mostra a solução obtida para a integral considerada, segundo a resolução por meio dos
métodos computacionais abordados:
Tabela 1 - Comparativa entre os métodos computacionaisMétodo S1 S2 S3 T1 SP1
Valor da integral (n=10) 2,28000 2,66000 3,08000 2,68000 2,66667
Tempo (n=10) 0,00400 0,00400 0,00400 0,00500 0,00400
Erro (n=10) 0,38666 0,00666 0,41334 0,01334 0,00001
Valor da integral(n=100) 2,62680 2,66660 2,70680 2,66680 2,66667
Tempo(n=100) 0,00400 0,00400 0,00400 0,00600 0,24000
Erro(n=100) 0,03986 0,00006 0,41334 0,00001 0,00001
Valor da integral (n=1000) 2,66267 2,66667 2,67067 2,66667 2,66667
Tempo (n=1000) 0,00400 0,00500 0,00400 0,023000 0,02300
Erro (n=1000) 0,00399 0,00001 0,00401 0,00001 0,00001
Fonte:Autoria Própria, 2012
Com a ajuda da tabela acima, podemos observar que a quantidade de subintervalos é proporcional
à precisão, ou seja, quanto maior o número de subintervalos mais precisa será a resposta. Percebe-se
também que o melhor método tanto para n=10, 100 e 1000 é a regra de Simpson 1/3, pois o método
aproxima a função por um polinômio de grau dois, fazendo com que possua a maior precisão e agilidade.
Na tabela, pode-se ver também que os métodos que obtiveram o maior erro foi o do ponto à
esquerda e do ponto a direita, isso porque deixa de levar em consideração alguns espaços entre a curva
e os retangulos para o ponto a esquerda, já para o ponto a direita acontece o inverso, sobra espaço dos
retangulos, fazendo assim com que sua aproximação seja maior que o valor analítico, com isso, fica
nitido que para uma boa aproximação utilizando o ponto a esquerda e o ponto a direita é necessário uma
grande quantidade de subintervalos.
Percebe-se que o tempo quase não muda de um método para o outro, sendo que o método mais
lento a se chegar a um valor aproximado com n=10 foi a regra do Trapézio (T1) com 0,00500 segundos,
já para n=100 a regra 1/3 de Simpson (SP1) é o mais lento, e para n=1000 os métodos mais lentos foram
os dois métodos citados anteriormente com 0,02300 segundos.
Vemos agora exemplos de gráficos com n=10 para os métodos do ponto esquerdo, ponto médio,
ponto direito e regra do trapézio, respectivamente:

38
Gráfico 14 - Ponto à Esquerda com n = 10
Gráfico 15 - Ponto Médio com n = 10

39
Gráfico 16 - Ponto à Direita com n = 10
Gráfico 17 - Regra do Trapézio com n = 10
4.2.2 Análise do Problema 2
Considere a integral definida a ser resolvida:
∫ 2
0x4dx

40
Gráfico 18 - Função x4
A solução analítica da integral é: ∫ 2
0x4dx
=x5
5
∣∣∣∣∣2
0
substituindo no intervalo temos:
=25
5− 05
5
= 6,4−0 = 6,4
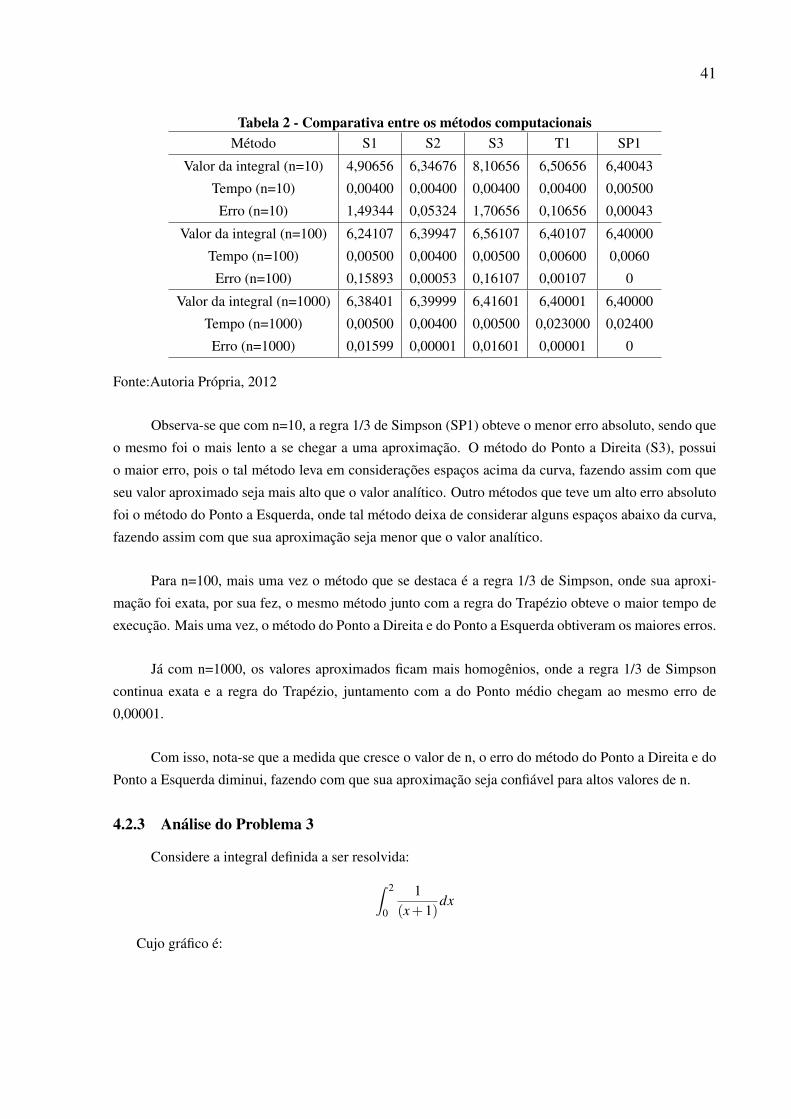
Nesse ponto, a Tabela 2 mostra a solução obtida para a integral considerada, segundo a resolução
por meio dos métodos computacionais abordados.
41
Tabela 2 - Comparativa entre os métodos computacionaisMétodo S1 S2 S3 T1 SP1
Valor da integral (n=10) 4,90656 6,34676 8,10656 6,50656 6,40043
Tempo (n=10) 0,00400 0,00400 0,00400 0,00400 0,00500
Erro (n=10) 1,49344 0,05324 1,70656 0,10656 0,00043
Valor da integral (n=100) 6,24107 6,39947 6,56107 6,40107 6,40000
Tempo (n=100) 0,00500 0,00400 0,00500 0,00600 0,0060
Erro (n=100) 0,15893 0,00053 0,16107 0,00107 0
Valor da integral (n=1000) 6,38401 6,39999 6,41601 6,40001 6,40000
Tempo (n=1000) 0,00500 0,00400 0,00500 0,023000 0,02400
Erro (n=1000) 0,01599 0,00001 0,01601 0,00001 0
Fonte:Autoria Própria, 2012
Observa-se que com n=10, a regra 1/3 de Simpson (SP1) obteve o menor erro absoluto, sendo que
o mesmo foi o mais lento a se chegar a uma aproximação. O método do Ponto a Direita (S3), possui
o maior erro, pois o tal método leva em considerações espaços acima da curva, fazendo assim com que
seu valor aproximado seja mais alto que o valor analítico. Outro métodos que teve um alto erro absoluto
foi o método do Ponto a Esquerda, onde tal método deixa de considerar alguns espaços abaixo da curva,
fazendo assim com que sua aproximação seja menor que o valor analítico.
Para n=100, mais uma vez o método que se destaca é a regra 1/3 de Simpson, onde sua aproxi-
mação foi exata, por sua fez, o mesmo método junto com a regra do Trapézio obteve o maior tempo de
execução. Mais uma vez, o método do Ponto a Direita e do Ponto a Esquerda obtiveram os maiores erros.
Já com n=1000, os valores aproximados ficam mais homogênios, onde a regra 1/3 de Simpson
continua exata e a regra do Trapézio, juntamento com a do Ponto médio chegam ao mesmo erro de
0,00001.
Com isso, nota-se que a medida que cresce o valor de n, o erro do método do Ponto a Direita e do
Ponto a Esquerda diminui, fazendo com que sua aproximação seja confiável para altos valores de n.
4.2.3 Análise do Problema 3
Considere a integral definida a ser resolvida:
∫ 2
0
1(x+1)
dx
Cujo gráfico é:

42
Gráfico 19 - Função 1(x+1)
A solução analítica da integral é: ∫ 2
0
1(x+1)
dx
utilizando a regra da substituição, dizemos que u = (x+1), logo du = dx. Assim temos
∫ 2
0
duu
= ln(u)
∣∣∣∣∣2
0
= ln(x+1)
∣∣∣∣∣2
0
= ln(2+1)− ln(0+1)
= 1,09861−0 = 1,09861
Nesse ponto, a tabela 3 descreve os resultados obtidos para a integral considerada, segundo a
aplicação do métodos abordados :

43
Tabela 3 - Comparativa entre os métodos computacionaisMétodo S1 S2 S3 T1 SP1
Valor da integral (n=10) 1,16823 1,09724 1,03490 1,10156 1,09866
Tempo (n=10) 0,00400 0,00400 0,00400 0,00400 0,00400
Erro (n=10) 0,06961 0,00147 0,06371 0,00294 0,00005
Valor da integral (n=100) 1,10531 1,09860 1,09198 1,09864 1,09861
Tempo (n=100) 0,00500 0,00400 0,00400 0,00600 0,00700
Erro (n=100) 0,00669 0,00001 0,00663 0,00294 0
Valor da integral (n=1000) 1,09928 1,09861 1,09795 1,09861 1,09861
Tempo (n=1000) 0,00400 0,00500 0,00400 0,02400 0,02200
Erro (n=1000) 0,00066 0 0,00066 0 0
Fonte:Autoria Própria, 2012
Com n=10, o método com melhor aproximação é a regra 1/3 de Simpson (SP1), isso acontece
pois sua aproximação se dá através de um polinômio interpolador de grau 2.Mais uma vez, os piores
métodos foram o do Ponto a Esquerda (S1) e do Ponto a Direita (S2) O tempo para n=10 acaba sendo
um parametro não muito bom, já que todos os métodos obtiveram o mesmo tempo de execução.
Para n=100 a aproximação já acontece de forma exata para a regra 1/3 de Simpson. Percebe-se
que o método do Ponto Médio (S2) possui uma excelente aproximação, com um erro inferior a regra do
Trapézio (T1).
Com n=100, tanto o método do Ponto Médio, como a regra do Trapézio e a regra 1/3 de Simpson
obtiveram um valor aproximado exato. Mais uma vez, o método do Ponto a Esquerda e do Ponto a
Direita, obtiveram os mais elevados erros, sendo que a medida que n aumenta, o erro diminui.
4.2.4 Análise do Problema 4
Considere a integral definida a ser resolvida:
∫ 2
0
√x+1dx
Cujo gráfico é:
Gráfico 20 - Função√
x+1

44
A solução analítica da integral é: ∫ 2
0
√x+1dx
utilizando a regra da substituição, dizemos que u = (x+1), logo du = dx. Assim temos
∫ 2
0u1/2du
=2u3/2
3
∣∣∣∣∣2
0
=
√2(x+1)3
3
∣∣∣∣20
=
√(x+1)3
3−
√(x+1)3
3= 2,79744
.
Nesse ponto, a Tabela 4 descreve os resultados obtidos para a integral considerada, mediante a
aplicação dos métodos abordados.

45
Tabela 4 - Comparativa entre os métodos computacionaisMétodo S1 S2 S3 T1 SP1
Valor da integral (n=10) 2,72353 2,79779 2,86994 2,79673 2,79743
Tempo (n=10) 0,17000 0,00400 0,00400 0,00400 0,00400
Erro (n=10) 0,07391 0,00035 0,07250 0,00071 0,00001
Valor da integral (n=100) 2,79011 2,79743 2,80475 2,79743 2,79743
Tempo (n=100) 0,00400 0,00400 0,00400 0,00600 0,00600
Erro (n=100) 0,00733 0,00001 0,00731 0,00001 0,00001
Valor da integral (n=1000) 2,79670 2,79744 2,79817 2,79743 2,79743
Tempo (n=1000) 0,00400 0,00500 0,00400 0,02400 0,01900
Erro (n=1000) 0,00074 0,00000 0,00073 0,00001 0,00000
Fonte:Autoria Própria, 2012
Com o número de subintervalos igual a 10, observa-se que a regra 1/3 de Simpson (SP1) é a que
possui o menor erro absoluto, e os métodos do Ponto a Esquerda (S1) e do Ponto a Direita (S3) possuem
o erro absoluto elevado. O tempo quase não varia entre os métodos, sendo o que demorou mais a se
chegar a uma aproximação foi o método do Ponto a Esquerda.
Para n=100, tanto o método do Ponto Médio (S2), como a regra do Trapézio (T1) e a regra 1/3
de Simpson obteve o mesmo valor aproximado, cujo o erro absoluto é de 0,00001. Mais uma vez, os
métodos (S1) e (S2) obtiveram o maior erro absoluto.
Já pra n=1000, tanto o método (S2), como o método (SP1) obetiveram o valor aproximado ex-
ato. Percebe-se que com o aumento do grau de dificuldade da integral, percebemos que só com 1000
subintervalos é que se consegue chegar a uma aproximação exata.
4.2.5 Análise do Problema 5
Considere a integral definida a ser resolvida:
∫ 2
0sen(x)dx
Cujo gráfico é:

46
Gráfico 21 - Função sen(x)
A solução analítica da integral é: ∫ 2
0sen(x)dx
=−cos(x)
∣∣∣∣∣2
0
=−(cos(2)− (−cos(0))
= 0,416146+1 = 1,41614
.
Nesse ponto, a Tabela 5 descreve os resultados obtidos para a integral considerada, mediante a
aplicação dos métodos abordados.

47
Tabela 5 - Tabela comparativa entre os métodos computacionaisMétodo S1 S2 S3 T1 SP1
Valor da integral (n=10) 1,32049 1,41851 1,50235 1,41142 1,41615
Tempo (n=10) 0,17000 0,00400 0,00400 0,00400 0,00400
Erro (n=10) 0,09565 0,00237 0,08621 0,00472 0,00001
Valor da integral (n=100) 1,40700 1,41617 1,42519 1,41610 1,41614
Tempo (n=100) 0,00400 0,00300 0,00400 0,00600 0,00700
Erro (n=100) 0,00914 0,00003 0,00905 0,00004 0
Valor da integral (n=1000) 1,41523 1,41614 1,41705 1,41614 1,41614
Tempo (n=1000) 0,00400 0,00400 0,00400 0,02400 0,02300
Erro (n=1000) 0,00091 0 0,00091 0 0
Fonte:Autoria Própria, 2012
Com n=10, é perceptível que o método mais eficiente é 1/3 de Simpson (SP1), pois é um dos mais
rápidos e com a maior precisão. Já o método do Ponto a Esquerda (S2) e do Ponto a Direita (S3) é o
que possui o maior erro absoluto. O ponto Médio (S2) possui um erro absoluto menor que a regra do
Trapézio (T1), pois para essa função, o método (S2) consegue fazer um equilíbrio entre os espaços vazios
entre a curva e os retângulos e os retângulos que excederam a curva.
Com n=100, percebe-se que o método (SP1) possui o valor aproximado exato.E o método (S2),
mais uma vez supera o método (T1) com um menor erro absoluto. O método que demorou mais na
execução da aproxmição foi o (SP1) com um tempo de 0,00700 segundos.
Para n=100, os métodos (S2), (T1) e (SP1) conseguiram chegar a uma aproximação exata dentro
da precisão estabelecida.

48
5 CONSIDERAÇÕES FINAIS
Este trabalho teve como objetivo mostrar as aplicações e importância de se usar os métodos com-
putacionais na resolução de integrais, cujo grau dificuldade é altíssimo. Os métodos estudados e analisa-
dos em todo o trabalho nos leva ao seguinte entendimento:
Os métodos de integração analítica e integração numérica utilizados nas resoluções de integrais
diferem em vários aspecto quanto a convergência, erro de truncamento, agilidade, entre outros. Além
dessas vantagens, os métodos numéricos tem grande apelo prático uma vez que podem ser embutidos em
ambientes computacionais. Mas o objetivo geral dos dois métodos é comum, ou seja, encontrar o valor
exato ou aproximado da integral.
Uma das principais vantagens dos métodos analíticos sobre os métodos de integração numérica
é que podem ser utilizados em qualquer tipo de integral, sem que haja contra exemplo. Já os métodos
numéricos apresentam algumas restrições, como por exemplo a regra 1/3 de Simpson necessita que o
número de subintervalos seja par, já a regra 3/8 de Simpson necessita que o número de subintervalos seja
ímpar.
As características mais formidáveis e que merecem destaque no presente trabalho são as seguintes:
• Aproximação dos valores analíticos com grande exatidão;
• Resolução de integrais complexas;
• Agilidade na obtenção do resultado;
• Grande aplicabilidade no ramo da engenharia;
Comparando todos os resultados aproximados com aqueles obtidos analiticamente, observa-se
que a regra de Simpson apresenta menor erro e chega de maneira mais ágil e fácil ao resultado, pois a
aproximação pela regra de Simpson é feita por uma função de segundo grau integrada.
O que deixa evidente é que a regra do Trapézio é exata para polinômios de grau um, enquanto que
a regra de Simpson é exata para polinômios de terceiro grau.
Os métodos da regra do trapézio, regra 13 de Simpson e 3
8 de Simpson, diferem-se no polinômio
interpolador. Para a regra do trapézio a aproximação acontece através de um polinômio linear, deixando
assim de considerar alguns espaços de uma função de elevado grau, já que não tem como o polinômio
linear acompanhar uma função de alto grau, ou seja, a regra do trapézio vai ser de grande utilidade em
funçoes de grau menor. O mesmo não acontece para a regra 13 de Simpson, pois a aproximação se dá
através de um polinômio de grau dois, fazendo com que ocorra um melhor ajuste para polinômios de
segundo grau.

49
6 REFERÊNCIAS
ARENALES, Selma; DAREZZSO, Arthur.Cálculo Numérico. São Paulo: Thompson, 2008.
RUGGIERO, Márcia A. Gomes; LOPES, Vera Lúcia da Rocha.Cálculo Numérico: Aspectos Teóri-cos e Computacionais. 2. ed. São Paulo: Makron Books, 1996.
BURDEN, Richard L; FAIRES, Douglas.Análise Numérica. São Paulo: Cengage, 2008.
CAMPOS FILHO,; FERREIRA, Frederico.Algoritmos Numéricos. 2. ed. Rio de Janeiro: Ltc, 2010.
BOYER, Carl B.História da Matemática. São Paulo: Edgard Blucher, 1974.
FRANCO, Neide Bertold.Cálculo Numérico. São Paulo: Prentice Hall, 2006.
HUGHES; HALLET.Cálculo de uma e várias variáveis. Rio de Janeiro: Ltc, 2011.
GUIDORIZZI, Hamilton Luiz.Um curso de cálculo. 5. ed. Rio de Janeiro: Ltc, 2008.
THOMAS, George B.Cálculo. São Paulo: Pearson, 2010.
FREITAS, Sérgio Roberto de.Métodos Numéricos. Notas de Aula, disponível em
htt p : //www.decom.u f op.br/bob/com400/livros/livro1.pd f . Acesso em 06/09/2011 18h:36 min
SPERANDIO, D. Mendes.Cálculo Numérico: Características matemáticas e computacionais dosmétodos numéricos. São Paulo: Rearson, 2006.
htt p : //pt.wikipedia.org/wiki/Interpolao.Acessoem30/10/201215h : 32min
htt p : //obaricentrodamente.blogspot.com.br/2011/03/interpolacao− polinomial − parte− 1.html.
Acesso em 30/10/2012 15h:40 min
htt p : //pt.wikipedia.org/wiki/Soma−de−Riemann.Acessoem30/10/201215h : 32min