Embed Size (px)
Citation preview

UNIVERSIDADE TÉCNICA DE LISBOA
Rectificador de Factor de Potência Unitário
Dissertação para obtenção do Grau de
Engenharia Electrotécnica e de Computadores
Presidente: Prof.
Orientador: Prof.
Vogal: Prof.
Ferreira Pinto
Vogal: Prof.
UNIVERSIDADE TÉCNICA DE LISBOAINSTITUTO SUPERIOR TÉCNICO
Rectificador de Factor de Potência Unitário
Tiago Miguel Vilela Madeira
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Júri
Doutor Paulo José da Costa Branco
Prof. Doutor José Fernando Alves da Silva
Doutora Sónia Maria Nunes dos Santos Paulo
Ferreira Pinto
Doutor Carlos Martins
Outubro de 2009
UNIVERSIDADE TÉCNICA DE LISBOA INSTITUTO SUPERIOR TÉCNICO
Rectificador de Factor de Potência Unitário
Mestre em
Engenharia Electrotécnica e de Computadores
nes dos Santos Paulo


Agradecimentos
Quero agradecer a todas as pessoas sem as quais não teria sido possível a realização deste trabalho. Em
primeiro lugar, quero agradecer ao meu orientador, o Professor José Fernando Alves da Silva, que esteve sempre
disponível para me atender e ajudar no que fosse preciso. Adicionalmente agradeço o apoio que me foi prestado
pela minha família e amigos no decorrer do trabalho.

Resumo
Os rectificadores a díodos devido ao seu elevado rendimento têm sido cada vez mais utilizados para obter
uma tensão contínua a partir de uma fonte alternada. No entanto, a corrente pedida à rede por estes conversores
não é sinudoidal, o que leva à distorção da corrente da rede. Surge assim a necessidade de utilizar circuitos com
factor de potência unitário recorrendo-se para isso a circuitos AC/DC em conjunto com circuitos DC/DC.
Neste trabalho começa-se por analisar as vantagens e desvantagens das principais topologias (redutor,
elevador e redutor elevador) de rectificadores de factor de potência unitário.
Após esta análise estuda-se mais pormenorizadamente um circuito DC/DC da topologia redutor elevador
procedendo-se ao dimensionamento dos vários componentes e simulação do sistema, com a tensão de saída
controlada.
Seguidamente estuda-se o rectificador monofásico de ponte completa a díodos, que vai permitir fazer a
rectificação de AC para DC, e ligam-se os dois conversores. Com o objectivo de diminuir a distorção harmónica da
corrente da rede dimensiona-se um filtro de entrada para eliminar as componentes de alta frequência.
Para garantir que a corrente de entrada é alternada sinusoidal controla-se a corrente de saída do
rectificador monofásico de modo a que esta tenha a forma de onda de uma sinusoíde duplamente rectificada em
fase com a tensão.
Finalmente simula-se a totalidade do sistema, com a tensão de saída e a corrente do rectifcador
controladas, para funcionamento em modo redutor e para modo elevador.

Abstract
Due to their high efficiency diode rectifiers are increasingly being used to convert line frequency AC to DC.
However this type of rectifiers draws non sinusoidal current from the grid, which leads to harmonic distortion of the
grid current.
This leads to the need to use circuits which have unitary power factor. This circuits can be implemented
using AC/DC converters combined with DC/DC converters.
Initially the advantages and disadvantages of the main unity power factor converter topologies (buck, boost
and buck-boost) are analyzed,
After this analysis the buck-boost converter is studied in greater detail, which allows to choose the
components necessary for the converter. With the components picked the converter’s response is simulated with an
output voltage control.
The next step is to study the single phase diode rectifier used to convert line frequency ac to dc and
combine it with the buck-boost converter. It is also necessary to reduce the input current distortion, so a filter is used
to eliminate high frequency harmonics.
In order to guarantee that the input current waveform is sinusoidal the single phase diode rectifier’s output
current is must be made to have a waveform of a rectified sinusoid in phase with the input voltage.
Finally the whole system, with output DC voltage and input AC current being controlled, is simulated for
buck mode and boost mode

1
Índice
1. Introdução ............................................................................................................................. 5
1.1 Motivação ...................................................................................................................... 5
1.2 Objectivo e estrutura do trabalho ................................................................................. 9
2. Conversor Redutor Elevador ............................................................................................... 10
2.1 Análise do Conversor Redutor Elevador sem perdas .................................................. 10
2.2 Análise do Conversor Redutor Elevador com perdas .................................................. 13
2.3 Dimensionamento do Conversor Redutor Elevador ................................................... 15
2.4 Controlo do conversor redutor elevador .................................................................... 19
2.5 Simulação do conversor redutor elevador .................................................................. 23
2.6 Redimensionamento da capacidade de saída ............................................................. 26
2.7 Verificação do valor da capacidade de saída .............................................................. 27
3. Rectificador monofásico de onda completa ....................................................................... 28
3.1 Análise do Rectificador monofásico de onda completa. ............................................. 28
3.2 Dimensionamento do Rectificador monofásico de onda completa ........................... 30
3.3 Filtro de Entrada .......................................................................................................... 31
3.4 Controlo de corrente ................................................................................................... 37
3.5 Controlo do Rectificador de factor de potência unitário ............................................ 37
3.6 Redimensionamento dos valores da bobina e do condensador ................................. 41
4. Ensaio do Rectificador de Factor de Potência Unitário ....................................................... 44
4.1 Ensaio do Rectificador de Factor de Potência Unitário como redutor sem filtro de
entrada e com a corrente da bobina L controlada.................................................................. 44
4.2 Ensaio do Rectificador de Factor de Potência Unitário como redutor com os valores
inciais de L e C ......................................................................................................................... 46
4.3 Ensaio do Rectificador de Factor de Potência Unitário como Redutor ....................... 47
4.4 Ensaio do Rectificador de Factor de Potência Unitário como Elevador ...................... 50
5. Conclusões........................................................................................................................... 53
6. Bibliografia .......................................................................................................................... 55
A. Anexo A .................................................................................................................................. i
B. Anexo B ................................................................................................................................. ii
C. Anexo C..................................................................................................................................iv

2
Simbologia
� - Condensador de saída � - Condensador do filtro de entrada ��� – Erro entre a corrente de referência e a corrente na bobina L ��� – Erro entre a tensão de referência e a tensão na saída do conversor redutor elevador – Frequência de comutação % - Factor de potência '() – corrente da rede alternada '* – Corrente no condensador C '+ – Corrente na bobina L '+,- – Valor de referência para a corrente na bobina L '/ – Corrente de entrada do conversor redutor elevador '/,- – Valor de referência para a corrente de entrada do conversor redutor elevador '0 – Corrente de saída do conversor redutor elevador IGBT – Isolated Gate Bipolar Transistor 5� - Constante integral do compensador proporcional integral 57 - Constante proporcional do compensador proporcional integral 8 – Bobina de armazenamento intermédio 8 – Bobina do filtro de entrada 8; – Bobina do filtro de entrada de alta frequência <*=>?@ - Potência de perdas devido à comutação dos semicondutores <� - Potência de entrada <,C - Potência de perdas na resistência rC

3
<,� - Potência de perdas na resistência rL <0 – Potência de saída do conversor redutor elevador PWM – Pulse Width Modulation G� - Resistência representativa do conversor redutor elevador I) - Resistência de perdas no condensador C I - Resistência do filtro de entrada I+ - Resistência de perdas na bobina L G0 – Resistência de saída J – Perído de comutação JK - Constante de tempo que representa o atraso devido ao conversor redutor elevador JLM - Taxa de distorção harmónica J7 - Constante de tempo que representa o pólo do compensador proporcional integral P, – Tempo de crescimento da corrente no IGBT P – Tempo de decrescimento da corrente no IGBT P,, – Tempo de recuperação inversa de um Díodo PR - Tempo de estabelecimento de um Díodo JS - Constante de tempo que representa o zero do compensador proporcional integral TU) - Tensão de entrada do conversor redutor elevador V() – Tensão da rede alternada W* – Tensão aos terminais do condensador C W*X – Tensão aos terminais do condensador Cf V*- – Tensão entre o colector e o emissor de um IGBT V- - Valor eficaz da tensão da rede

4
V+ – Tensão aos terminais ba bobina L V,� – Tensão aos terminais ba resistência rL VYYZ – Tensão máxima inversa de pico repetitivo V0 – Tensão de saída V0,- – Valor de referência para a tensão de saída \ - Impedância característica do filtro ^ - Ganho de realimentação _ – Factor de ciclo do conversor redutor elevador ` - Rendimento do conversor redutor elevador `a - Rendimento do rectificador de factor de potência unitário b'+ – Tremor da corrente na bobina L bV0 – Tremor da tensão de saída do conversor bV0c – Tremor da tensão de saída do conversor considerando a resistência R0 e – Função de estado dos IGBTs Q1 e Q2 i - Factor de amortecimento jk - Frequência natural de um sistema de segunda ordem j7 - Frequência de corte do filtro de entrada l – Desfasagem entre a corrente e a tensão na fonte alternada
5
1. Introdução
1.1 Motivação
Os rectificadores não comandados, devido ao seu elevado rendimento, têm sido utilizados com cada vez
maior frequência para obter uma tensão contínua, a partir da tensão alternada da rede, para uma grande gama de
aplicações. Contudo os circuitos rectificadores com díodos geralmente utilizam um condensador para reduzir a
ondulação na tensão contínua. Esta situação causa que a corrente pedida à rede eléctrica seja impulsiva e por
conseguinte tenha um elevado conteúdo harmónico.
A injecção de harmónicas na rede eléctrica leva à deterioração da mesma, tendo esta situação levado à
criação de limites para a distorção da corrente de entrada. Por esta razão é necessário recorrer a circuitos de
correcção do factor de potência. Os métodos utilizados para a correcção do factor de potência podem ser
classificados como;
• Métodos de correcção passiva do factor de potência.
• Métodos de correcção activa do factor de potência.
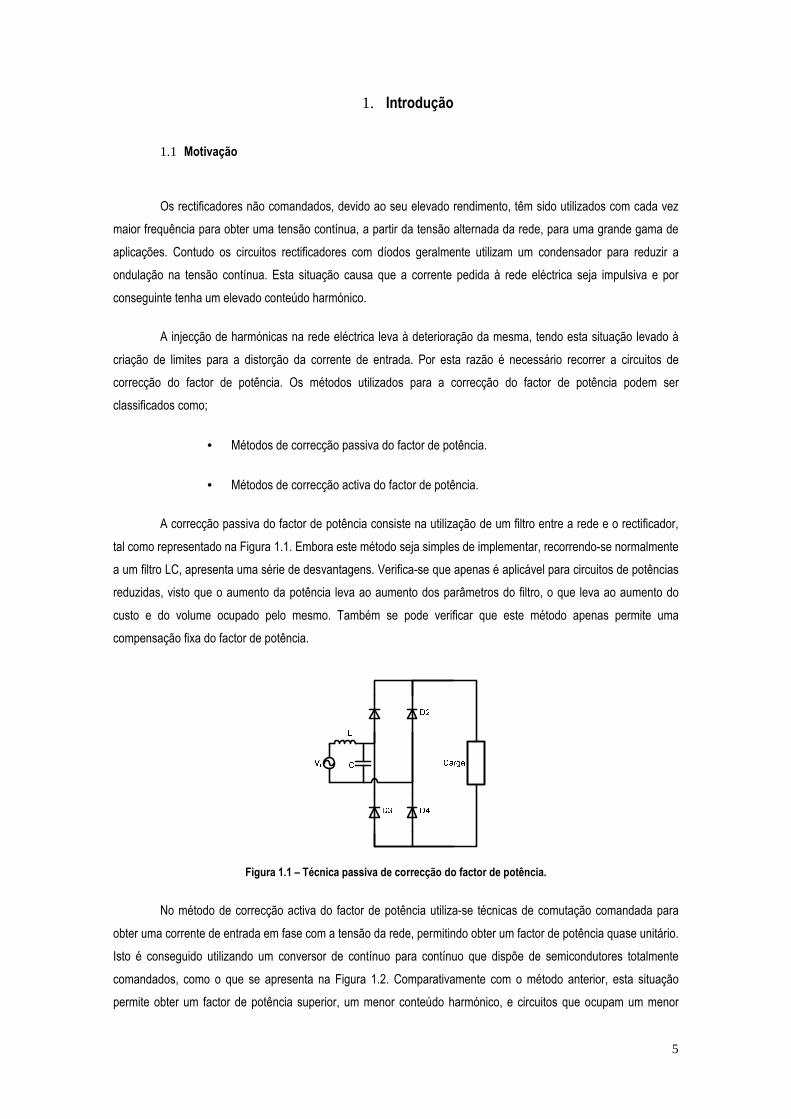
A correcção passiva do factor de potência consiste na utilização de um filtro entre a rede e o rectificador,
tal como representado na Figura 1.1. Embora este método seja simples de implementar, recorrendo-se normalmente
a um filtro LC, apresenta uma série de desvantagens. Verifica-se que apenas é aplicável para circuitos de potências
reduzidas, visto que o aumento da potência leva ao aumento dos parâmetros do filtro, o que leva ao aumento do
custo e do volume ocupado pelo mesmo. Também se pode verificar que este método apenas permite uma
compensação fixa do factor de potência.
Figura 1.1 – Técnica passiva de correcção do factor de potência.
No método de correcção activa do factor de potência utiliza-se técnicas de comutação comandada para
obter uma corrente de entrada em fase com a tensão da rede, permitindo obter um factor de potência quase unitário.
Isto é conseguido utilizando um conversor de contínuo para contínuo que dispõe de semicondutores totalmente
comandados, como o que se apresenta na Figura 1.2. Comparativamente com o método anterior, esta situação
permite obter um factor de potência superior, um menor conteúdo harmónico, e circuitos que ocupam um menor

6
volume. No entanto, apresenta uma complexidade maior associada ao controlo dos dispositivos de comutação e um
custo maior.
D2
L
Vi Carga
D4D3
C Conversor DC/DC
Figura 1.2 – Técnica activa de correcção do factor de potência.
As várias técnicas de correcção de factor de potência podem ser classificadas como
• Correcção do factor de potência por modulação de largura de impulso (PWM)
• Correcção do factor de potência com dispositivos comutados por ressonância
• Correcção do factor de potência com dispositivos comutados por comutação suave
Na técnica de modulação de impulso a frequência de comutação dos semicondutores é constante,
contudo os instantes em que os dispositivos estão ao corte ou à condução é variável. Este modo de controlo dos
semicondutores tem a vantagem de ser fácil de analisar e controlar [1].
Na correcção do factor de potência por PWM, pode-se utilizar dois modos distintos de controlo, controlo de
corrente ou controlo de tensão, existindo dois tipos de condução
• Modo de condução descontínua
• Modo de condução contínua
No modo de condução descontínua o elemento armazenador de energia é completamente carregado e
descarregado durante um ciclo de comutação. Este modo de condução tem a vantagem de permitir um controlo
bastante simples.
No modo de condução contínua o elemento armazenador de energia não é descarregado no final de um
ciclo de comutação. Neste caso a corrente varia em torno de um valor de referência. A amplitude da variação está
directamente relacionado com o erro permitido para a diferença entre a corrente e a sua referência. Quanto menor o
erro, menor a variação (tremor) e no limite a corrente será igual à referência. Este modo necessita de um controlo
apresenta vantagens ao nível das tensões e correntes a suportar pelos semicondutores comandados tornando-o
preferível para aplicações de elevada potência.
7
No controlo de rectificadores por modulação de impulso podem usar-se várias topologias para o conversor
DC/DC, entre elas
• Topologia Redutora
• Topologia Elevadora
• Topologia Redutor Elevador
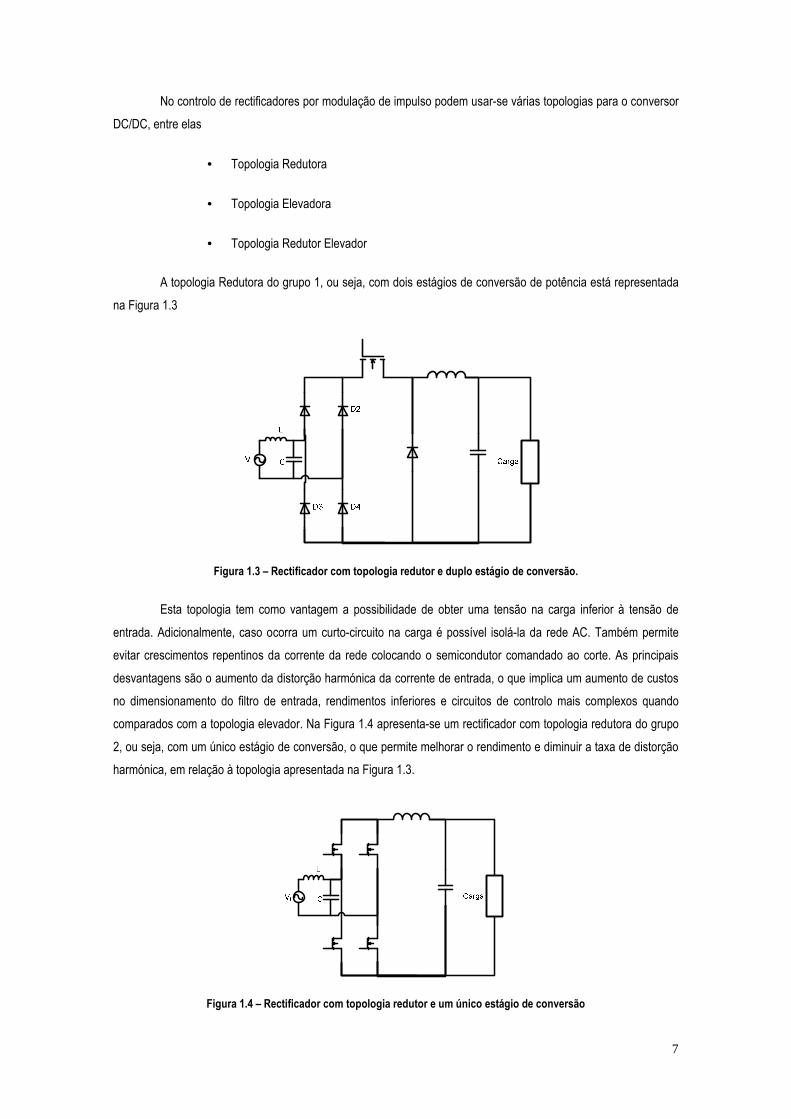
A topologia Redutora do grupo 1, ou seja, com dois estágios de conversão de potência está representada
na Figura 1.3
Figura 1.3 – Rectificador com topologia redutor e duplo estágio de conversão.
Esta topologia tem como vantagem a possibilidade de obter uma tensão na carga inferior à tensão de
entrada. Adicionalmente, caso ocorra um curto-circuito na carga é possível isolá-la da rede AC. Também permite
evitar crescimentos repentinos da corrente da rede colocando o semicondutor comandado ao corte. As principais
desvantagens são o aumento da distorção harmónica da corrente de entrada, o que implica um aumento de custos
no dimensionamento do filtro de entrada, rendimentos inferiores e circuitos de controlo mais complexos quando
comparados com a topologia elevador. Na Figura 1.4 apresenta-se um rectificador com topologia redutora do grupo
2, ou seja, com um único estágio de conversão, o que permite melhorar o rendimento e diminuir a taxa de distorção
harmónica, em relação à topologia apresentada na Figura 1.3.
Figura 1.4 – Rectificador com topologia redutor e um único estágio de conversão

8
Seguidamente apresentam-se os rectificadores em ponte com topologia elevadora com dois estágios e um
estágio de conversão.
Figura 1.5 – Rectificadores em ponte com topologia elevadora com um estágio e dois estágios de conversão, respectivamente
Os rectificadores com topologia elevadora têm a possibilidade de obter um valor de tensão na carga
superior à tensão de entrada. Têm como grande vantagem a sua robustez e a facilidade de se controlar a corrente
na bobina. Comparativamente ao rectificador anterior apresentam um menor valor de distorção harmónica, o que faz
com que o filtro de entrada seja mais reduzido. As grandes desvantagens deste conversor prendem-se com a
impossibilidade de limitar crescimentos abruptos da corrente de entrada e a falta de capacidade de isolar a rede
alternada no caso de curto-circuito na carga.
O rectificador monofásico redutor elevador, que será estudado no decorrer deste trabalho, permite obter
uma tensão superior ou inferior à tensão da rede. Além disso, tal como no caso do redutor é possível isolar a carga
da rede em caso de curto-circuito e também permite limitar os crescimentos abruptos da corrente da rede [2].
Utilizando correcção do factor de potência com dispositivos comutados por ressonância tem-se a
vantagem de tanto a corrente como a tensão serem nulas no momento de comutação do dispositivo semicondutor,
devido à ressonância da bobina e condensador do circuito, diminuindo assim as perdas de comutação. Este
conversor tem a desvantagem dos semicondutores terem de suportar valores mais elevados de tensão e corrente,
quando comparados com o modo PWM e da frequência de comutação ser variável [1].
A correcção do factor de potência com semicondutores em que se utiliza comutação suave permite juntar
as vantagens do modo PWM com a correcção do factor de potência com dispositivos comutados por ressonância.
Desta forma, os semicondutores comutam a uma frequência definida, mas a comutação verifica-se para valores
nulos de tensão e corrente [1].

9
1.2 Objectivo e estrutura do trabalho
O objectivo deste trabalho passa pela criação, dimensionamento e controlo de uma nova topologia de
rectificador de factor de potência unitário recorrendo a uma topologia redutora elevadora.
Inicialmente começa-se por estudar, no capítulo 2, o conversor DC/DC, criado com base na topologia
redutor elevador, analisando-se o conversor com e sem perdas e fazendo-se o dimensionamento dos vários
componentes. Tendo todos os parâmetros do conversor DC/DC dimensionados simula-se o circuito.
No capítulo 3, o rectificador é analisado e dimensionado. Seguidamente, dimensiona-se um filtro de
entrada para o conjunto rectificador mais conversor DC/DC. Analisa-se o filtro tendo em conta o seu diagrama de
Bode e a colocação dos pólos e zeros em cadeia aberta do sistema. Projecta-se o controlo da corrente de entrada
do conversor DC/DC de modo a que esta siga uma referência com forma de onda duma sinusóide rectificada e
recalcula-se os parâmetros do circuito para esta nova situação. Dimensiona-se o controlador da tensão contínua de
saída.
Recorrendo ao programa MATLAB/Simulink e tendo em conta o dimensionamento realizado nos capítulos
anteriores simula-se o rectificador de factor de potência unitário sem o filtro de entrada. Seguidamente simula-se o
rectificador de factor de potência unitário com o filtro de entrada em regime de funcionamento redutor e em modo
elevador (capítulo 4).
Finalmente apresenta-se as conclusões sobre o trabalho (capítulo 5), sendo feita uma avaliação geral
sobre o circuito estudado.

10
2. Conversor Redutor Elevador
O conversor redutor elevador é um tipo de conversor de contínuo para contínuo que permite obter uma
tensão de saída, com massa comum, de valor superior ou inferior ao valor da tensão da entrada consoante o factor
de ciclo [3]. Seguidamente apresenta-se na Figura 2.1 o conversor redutor elevador estudado.
Figura 2.1 – Conversor Redutor Elevador.
2.1 Análise do Conversor Redutor Elevador sem perdas
Na análise do conversor os dispositivos semicondutores são considerados como interruptores ideais.
Desta forma os IGBT Q1 e Q2 apresentam duas zonas de funcionamento, a zona de corte e a zona de condução.
Os díodos D1 e D2 comportam-se, para uma tensão positiva aos seus terminais, como um curto-circuito e para uma
tensão negativa como um circuito aberto.
A análise do conversor será realizada em regime permanente e não lacunar, o que implica que o valor
médio da tensão aos terminais da bobina L e o valor médio da corrente do condensador são nulos. Considera-se
também que os dispositivos Q1 e Q2 são comandados simultaneamente obtendo-se os seguintes modos de
funcionamento.
Q1 e Q2 ON (0 <t <δT)
Os IGBT estão em condução o que implica que a tensão aos terminais de D1 é igual à tensão de entrada
ficando o díodo inversamente polarizado e portanto ao corte, ao passo que a tensão aos terminais de D2 é igual à
tensão de saída e consequentemente D2 também se encontra ao corte.
Neste modo de funcionamento a corrente da fonte DC vai percorrer a bobina L o que leva a que seja
armazenada energia nesta. O condensador C vai descarregar na resistência R0. A Figura 2.2 ilustra esta situação.

11
Figura 2.2 – Conversor Redutor Elevador com Q1 e Q2 ON
Nesta situação podem-se deduzir as seguintes expressões
m−TU) + V+ = 0−T* + V0 = 0'/ − '+ = 0 q ⇔ mV+ = TU)V0 = T*'+ = '/q (2.1)
Q1 e Q2 OFF (DT<t<T)
Os IGBT estão ao corte o que causa que a fonte DC esteja isolada do resto do circuito. Ambos os díodos
estão em condução, devido à continuidade da energia magnética, o que faz com que a energia armazenada na
bobina L seja transferida para o condensador. A Figura 2.3 ilustra esta situação.
Figura 2.3 – Conversor Redutor Elevador com Q1 e Q2 OFF
Nesta situação podem-se deduzir as seguintes expressões
sV+ + V= = 0'+tu = '0tu ⇔ s V+ = −V0'+tu = '0tu qq (2.2)
Com base nas expressões (2.2) e (2.1) obtém-se a equação da tensão na bobina L em função do tempo
V+ = sTU) 0 < P < _J−V0 _J < P < Jq (2.3)

12
Calculando o valor médio da tensão VL, obtém-se
V+tu = 1J wx TyPza0 + x −V0yPa
za { = T_ + V0_ − V0 (2.4)
Tendo em conta que o valor médio da tensão aos terminais da bobina L, em regime permanente é nulo,
pode-se calcular o valor médio da tensão de saída em função do factor de ciclo.
V0 = _1 − _ TU) ⇔ V0TU) = _1 − _ (2.5)
Constata-se através da expressão (2.5) que para valores de δ < 0,5 a tensão V0 é inferior a UDC
funcionando o conversor como um redutor enquanto que para valores de δ > 0,5 a tensão V0 é superior a UDC
funcionando o conversor como um elevador.
O valor médio da corrente na carga pode ser calculando sabendo que
'0tu = V0tuG0 (2.6)
e tendo em conta a equação (2.5)
'0tu = V0tuG0_1 − _ (2.7)
Assumindo que os semicondutores não apresentam perdas de comutação ou condução e que os
componentes reactivos não possuem resistência interna, o conversor tem rendimento unitário, o que permite
escrever
<� = <0 ⇔ TU) . '/tu = V0tu . '0tu (2.8)
Com base nas expressões (2.7) e (2.8) obtém-se uma relação entre a corrente de entrada e de saída
'/tu'0tu = _1 − _ (2.9)
Atendendo à expressão (2.9) pode-se também obter o valor médio da corrente na bobina L em função da
corrente de saída
'+tu = _'/tu = 11 − _ '0tu (2.10)

13
2.2 Análise do Conversor Redutor Elevador com perdas
Admitindo agora a existência de perdas, estas podem ser contabilizadas como resistências em série com
a bobina L e o condensador C, para além das perdas associadas à comutação e condução dos semicondutores.
Sendo assim obtém-se o esquema para o conversor representado na Figura 2.4.
Figura 2.4 – Conversor Redutor Elevador com perdas.
Nesta situação quando Q1 e Q2 estão ON:
}−TU) + V+ + V,� = 0−T* + V0 = 0'/ − '+ = 0 q ⇔ }V+ = TU) − V,�V0 = T*'+ = '/q (2.11)
Quando Q1 e Q2 OFF:
sV+ + V= + V,� = 0'+tu = '0tu ⇔ sV+ = −V0 − V,�'+tu = '0tuqq (2.12)
Com base nas equações (2.11) e (2.12) e sabendo que o valor médio da tensão aos terminais da bobina é
nulo, pode-se escrever
V+tu = 1J wx (T − V,�)yPza0 + x (−V0 − V,�)yPa
za {= T_ − V0 − V,� + V0_ = 0
(2.13)
podendo a queda de tensão na resistência rL ser escrita como

14
V,� = I+ . '+tu (2.14)
Tendo em conta que a corrente não se altera em relação ao caso ideal e recorrendo às expressões (2.6),
(2.10), (2.13) e (2.14) obtém-se a relação entre a tensão de entrada e a tensão de saída considerando perdas.
V0tuTU) = _(1 − _) + I+G0(1 − _) (2.15)
Pode-se constatar que a expressão anterior é igual à expressão para o caso sem perdas quando rL tende
para zero. A presença da resistência origina um rendimento não unitário
` = <0<� = <� − <,�<� = 1 − <,�TU) . '/tu (2.16)
Sabendo que <,� = I� . '+tu; e utilizando as expressões (2.6) e (2.10) pode-se escrever
` = 1 − I+T_ V0G011 − _ (2.17)
Atendendo à expressão que relaciona a tensão de saída com a tensão de entrada para o conversor com
perdas e após alguma manipulação a expressão do rendimento é a seguinte
` = 1 − I+G0(1 − _); + I+ (2.18)
Para se contabilizar no cálculo do rendimento as perdas associadas à resistência do condensador e à
comutação dos semicondutores pode-se considerar
` = 1 − I+G0(1 − _); + I+ − <,CTU) . '/tu − <*=>?@a=@��TU) . '/tu (2.19)
Estas parcelas adicionais são calculadas através das equações que se seguem. [3]
<,C = V0;I* (2.20)
<*=>?@a=@�� = <*=>?@���a� + <*=>?@U�=K=� + <*=>?@���a; + <*=>?@U�=K=; (2.21)
<*=>?@���a = V0tu . '+tu2. J �P, + P � (2.22)
<*=>?@U�=K= = V0tu . '+tuJ (P,, − PR) (2.23)
Os valores de tr, tf, trr, ts podem ser retirados do catálogo do dispositivo após a escolha do mesmo.

15
2.3 Dimensionamento do Conversor Redutor Elevador
De forma a dimensionar o conversor é preciso definir a tensão de entrada e a tensão de saída. O valor
médio da tensão de entrada será de 207,07 V, o que corresponde à tensão rectifica de uma fase da rede. Quanto à
carga, define-se o valor de 24 V como tensão de saída, o que implica que se vai ilustrar a utilização deste conversor
em modo redutor. A potência do conversor será de 1 kW e assume-se um rendimento de 95%.
Com base nestes valores é possível determinar o valor do factor de ciclo.
_ = V0tuTU) + V0tu ≈ 0,1039
Tendo em conta o valor da tensão de saída e a potência do conversor calcula-se a corrente de saída, a
corrente na bobina L e o valor de R0.
<0 = V0'0tu ⟹ '0tu ≈ 41,67� '�tu = 11 − _ '0tu ≈ 46,50� <0 = V0;G0 ⟹ G0 ≈ 0,576Ω
Por análise da Figura 2.1 é possível determinar os valores máximos da tensão e da corrente a suportar
pelos vários dispositivos semicondutores.
Quando o IGBT Q1 estiver ao corte ele vai estar sujeito a uma tensão inversa igual à tensão da fonte DC.
A corrente máxima suportada por Q1 é igual ao valor médio da corrente na bobina L.
O IGBT Q2 vai estar sujeito a uma tensão inversa igual à tensão de saída. A corrente máxima suportada é
igual ao valor médio da corrente na bobina L.
O díodo D1 vai estar sujeito a uma tensão inversa igual à tensão da fonte DC. A corrente máxima
suportada é igual ao valor médio da corrente na bobina L.
O díodo D2 vai estar sujeito a uma tensão inversa igual à tensão de saída do conversor. A corrente
máxima suportada é igual ao valor médio da corrente na bobina L.
Para este caso:

16
Tabela 1 – Dimensionamentos dos semicondutores.
Q1
Vce = UDC = 300 V
Icmax = IL = 46.5 A
Q2
Vce = V0 = 24 V
Icmax = IL = 46.5 A
D1
VRRM = UDC = 300 V
IDmax = IL = 46.5 A
D2
VRRM = V0 = 24 V
IDmax = IL = 46.5 A
A estes valores deve ser acrescido um factor de segurança de 50% a 100% no momento da escolha dos
componentes físicos.
Assumindo a existência de perdas nos semicondutores e considerando que as perdas de comutação
podem ser calculadas através das expressões (2.22) e (2.23) obtendo-se os valores de tr, tf, trr e ts por análise de
catálogos de semicondutores que verifiquem as condições de tensão e corrente acima referidas, estes parâmetros
serão iguais a:
P, = 15 × 10�� P, = 88 × 10�� P, = 85 × 10�� P, = 60 × 10��
e assumindo que as perdas de comutação representam 2% do total de perdas, as perdas na resistência
da bobina L representa 1% e os restantes 1% representam as perdas na resitência do condensador C.
<*=>?@a=@�� = 0,02 ∗ <0` = <*=>?@���a� + <*=>?@U�=K=� + <*=>?@���a; + <*=>?@U�=K=;
é possível calcular o valor para a frequência de comutação obtendo-se = 25,614 �L�.
Também é possível determinar o valor das resistências rL e rC sabendo a potência perdida por efeito de
Joule nestas resistências é calculada da seguinte forma

17
<,� = I+ . '+tu; (2.24)
<,C = V0. '* = V0;I* (2.25)
e assumindo que as perdas nas resistências representam em cada caso 1% das perdas no conversor
estas resistências podem ser calculadas
<,� = 0.01<0` = I+ . '+tu;
<,C = 0.01<0` = V0;I*
donde se obtém
I+ = 0,01ΩI) = 0,0055Ω
Em regime permanente não lacunar as grandezas iL e V0 apresentam uma pequena variação em torno do
valor médio. Esta variação está associada aos valores dos componentes reactivos tornando-se necessário
dimensioná-los para que esta variação assuma valores aceitáveis. Para este conversor considerou-se que a
corrente na bobina pode ter uma variação de 10% em relação ao valor nominal, ao passo que a tensão V0 apenas
pode ter uma variação de 1%, de forma a evitar que o valor de tensão na carga sofra grandes variações.
Sabendo que�K��K@ = ��+ e linearizando esta expressão, tendo em conta que a constante de tempo é muito
superior que o período associado à comutação dos semicondutores, esta expressão pode ser escrita como
Δ'+ΔP = V+8 (2.26)
Numa situação sem perdas quando Q1 e Q2 estão ON ΔP = _J e com base na expressão (2.1) a
expressão (2.26) pode ser reescrita como
8 = TU) . _JΔ'+ (2.27)
A equação(2.27), tendo em atenção a equação (2.5), pode ser reescrita como
8 = V0. (1 − _)JΔ'+ = TU) . JΔ'+1
1 + TU)V0 (2.28)

18
Contudo é preciso verificar que para este valor de L o conversor não vai operar em regime lacunar, para
tal é preciso garantir que '+ ≥ 0.
Por análise da Figura 2.5 conclui-se que para evitar o regime lacunar '+tu ≥ ∆��; e utilizando as equações
(2.6), (2.10) é possível obter uma expressão para o valor mínimo L.
8 ≥ G0(1 − _);J2 (2.29)
Figura 2.5 – Corrente na bobina L em função do tempo em regime não lacunar.
Para o dimensionamento do condensador e tendo em conta que K��K@ = ��) , e linearizando esta expressão,
pode-se escrever
∆V0∆P = '*� (2.30)
Assumindo a inexistência de perdas, quando Q1 e Q2 estão ON por analise da Figura 2.2 conclui-se que '* = −'0 ΔP = _J. Utilizando as equação (2.1) e (2.6) a equação (2.31) fica
∆V0∆P = −'0� ⇒ � = _JG0 V0∆V0 (2.31)
Atendendo à equação (2.5)a expressão anterior pode ainda ser reescrita como
� = _;JG0(1 − _) TU)∆V0 (2.32)
Considerando agora a existência da resistência rc em série com o condensador C a ondulação da tensão
de saída será mais elevada e igual a [4]
∆V0c = ∆V0 + I*∆'+ (2.33)
Tendo em conta a equação (2.27) e (2.30)
iLav

19
∆V0c = _JV0�G0 + TU)_J8 I) (2.34)
e utilizando a equação (2.5)
∆V0c = ¡ _�G0 + (1 − _)8 I)¢ V0J (2.35)
Tendo em conta as oscilações consideradas como admissíveis
Δ'+ ≈ 4,65 �ΔV0 ≈ 0,24 V
Utilizando as expressões (2.28) e (2.32) assim como os valores admissíveis para as variações da corrente
na bobina e tensão de saída é agora possível dimensionar os elementos reactivos do conversor.
L = 1,8059 × 10�£ LC = 7,0398 × 10�£ F
Tendo em conta a resistência rC e utilizando a equação (2.35)
∆V0c = 0,2654 V
2.4 Controlo do conversor redutor elevador
Com o objectivo de realizar a simulação do conversor é necessário garantir que o valor médio da tensão
na carga vai ter o valor desejado de 24 V. Adicionalmente, a ondulação em torno do valor médio da tensão na carga
tem de ser inferior aos limites determinados. Para cumprir estas especificações utiliza-se um controlo de tensão
recorrendo ao controlo interno da corrente na bobina L.
Tem-se portanto os seguintes objectivos de controlo primário e secundário, respectivamente
V0 = V0,- '+ = '+,-
Sabendo que V+ = 8 K��K@ e tendo em conta o estudo já feito deste conversor
V+ = sTU) ¤� ¥1 � ¥2 ¦§¨y©��ª−V0 ¤� M1 � M2 ¦§¨y©��ªq

20
Definindo a função γ
e = «1 ¤� ¥1 � ¥2 ¦§¨y©��ª0 ¤� M1 � M2 ¦§¨y©��ªq (2.36)
A tensão VL pode ser escrita em função de γ
V+ = eTU) − (1 − e)V0 (2.37)
o que permite escrever
y'+yP = eTU) + (e − 1)V08 (2.38)
donde imediatamente se conclui que
'+ ↑⇒ e = 1'+ ↓⇒ e = 0
Tendo em conta o objectivo de controlo definido e visto que os dispositivos são comutados a frequências
finitas existirá um erro associado à corrente da bobina L que se pode definir como ��� = '+,- − '+ = 0, e
assumindo que o erro admissível é ∆��® . Este valor foi escolhido para obter uma frequência de comutação próxima da
obtida no dimensionamento, visto que a alteração do valor do erro leva à variação da frequência de comutação.
Assim
��� > + ∆'+8 ⇒ '+ ↑⇒ y'+yP > 0 ⇒ e = 1��� < − ∆'+8 ⇒ '+ ↓⇒ y'+yP < 0 ⇒ e = 0
Este controlo é possível de implementar recorrendo a um comparador histeretico, que está representado
na Figura 2.6
Figura 2.6 – Controlo de corrente da bobina L
gama
1
comparadorGain
1
IL2
ILref
1
21
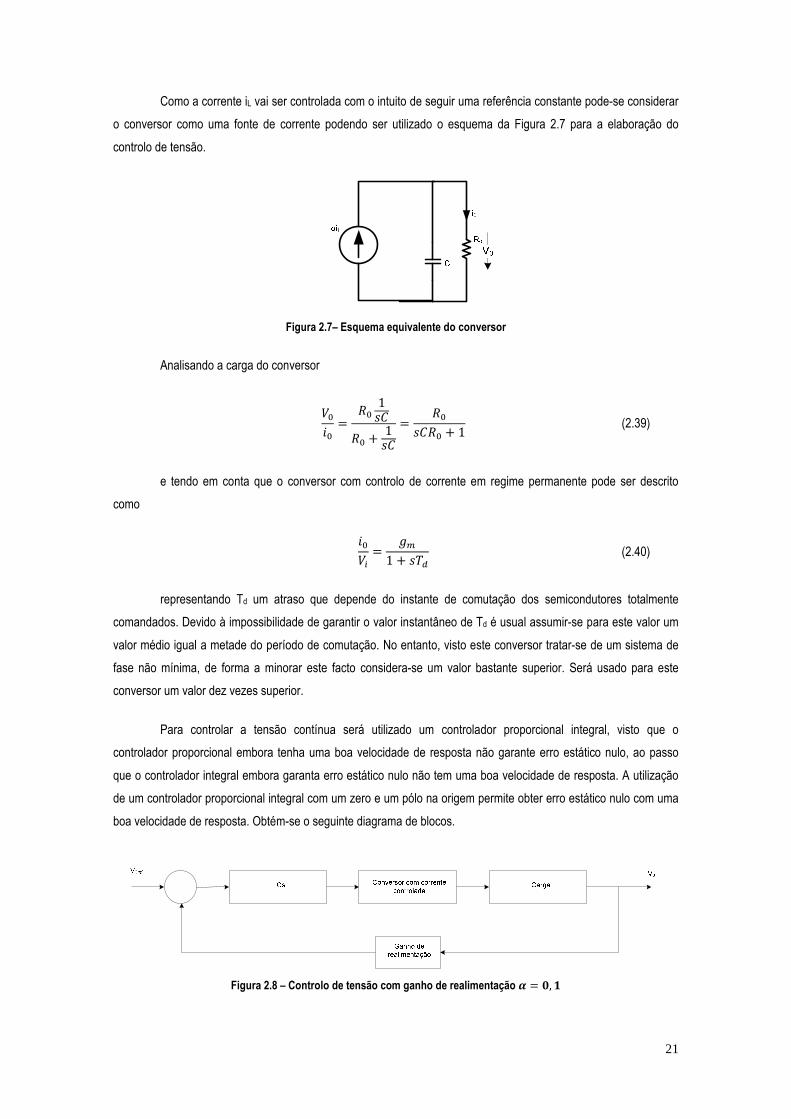
Como a corrente iL vai ser controlada com o intuito de seguir uma referência constante pode-se considerar
o conversor como uma fonte de corrente podendo ser utilizado o esquema da Figura 2.7 para a elaboração do
controlo de tensão.
Figura 2.7– Esquema equivalente do conversor
Analisando a carga do conversor
V0'0 = G0 1¤�G0 + 1¤� = G0¤�G0 + 1 (2.39)
e tendo em conta que o conversor com controlo de corrente em regime permanente pode ser descrito
como
'0V� = °>1 + ¤JK (2.40)
representando Td um atraso que depende do instante de comutação dos semicondutores totalmente
comandados. Devido à impossibilidade de garantir o valor instantâneo de Td é usual assumir-se para este valor um
valor médio igual a metade do período de comutação. No entanto, visto este conversor tratar-se de um sistema de
fase não mínima, de forma a minorar este facto considera-se um valor bastante superior. Será usado para este
conversor um valor dez vezes superior.
Para controlar a tensão contínua será utilizado um controlador proporcional integral, visto que o
controlador proporcional embora tenha uma boa velocidade de resposta não garante erro estático nulo, ao passo
que o controlador integral embora garanta erro estático nulo não tem uma boa velocidade de resposta. A utilização
de um controlador proporcional integral com um zero e um pólo na origem permite obter erro estático nulo com uma
boa velocidade de resposta. Obtém-se o seguinte diagrama de blocos.
Figura 2.8 – Controlo de tensão com ganho de realimentação ± = ², ³

22
O compensador proporcional integral pode ser escrito como
�R = J́ ¤ + 1J7¤ (2.41)
podendo também ser escrito na forma
�R = 57 + 5�µ (2.42)
com 57 = a¶a· e 5� = �a·
Com o intuito de diminuir a complexidade do sistema, o zero do compensador pode ser escolhida para
cancelar o pólo dominante do sistema, o que implica
J́ = �G0 (2.43)
Após o cancelamento deste pólo obtém-se para o sistema uma função de transferência em cadeia fechada
de segunda ordem [4]
V0V0,- = 1̂ °>^G0J7JK¤; + ¤JK + °>^G0J7JK
(2.44)
Comparando a última equação com a equação de um sistema de segunda ordem
2ijk = 1JKjk; = °>^G0J7JK
(2.45)
O que permite obter uma expressão para determinar TP considerando para i o valor √2 2¹ . Este valor
permite obter uma boa velocidade de resposta para um nível de oscilação aceitável.
J7 = 2JK^°>G0 (2.46)
Utilizando as expressões (2.43) e (2.45) pode-se dimensionar o compensador proporcional integral
JK = 3,9041 × 10�£ ¤
J́ = 4,0549 × 10�£ ¤
J7 = 3,8289 × 10�º ¤

23
Este controlo é válido para regimes de pequenas perturbações. Em regimes de grandes perturbações
como, por exemplo uma variação brusca de carga, podem ser originadas sobrecorrentes elevadas. Para evitar esta
situação utilizado um limitador de tipo anti-embalamento, que se apresenta na Figura 2.9
Figura 2.9 – Controlo de tensão com limitador de tipo anti-embalamento
O valor de KW deve estar compreendido entre 1/Kp e Kp/Ki [5]. Para escolher KW simulou-se o sistema
com diferentes valores de KW tendo-se observado a resposta do sistema para cada caso. Optou-se pelo valor de 0.5
para a constante KW, o que verifica os limites impostos.
Neste momento têm-se os dados necessários para a simulação do conversor redutor elevador.
2.5 Simulação do conversor redutor elevador
Tendo em conta o dimensionamento apresentado anteriormente pode-se, recorrendo ao
MATLAB/Simulink, simular o conversor redutor elevador. Desta forma é possível observar o valor médio da tensão e
da corrente de saída, assim como os valores de corrente e tensão na bobina L. Para além disto, é também possível
observar o tremor destas grandezas. O sinal de comando dos semicondutores é obtido através do sistema de
controlo mencionado anteriormente. O diagrama de blocos utilizado encontra-se no anexo A
A tensão de saída e a corrente de saída do conversor estão representadas na Figura 2.10.

24
Figura 2.10 – Evolução da corrente e tensão na carga durante o transitório de arranque.
A tensão e corrente na bobina podem ser observadas na Figura 2.11
Figura 2.11 – Evolução da corrente e tensão na bobina durante o transitório de arranque.
Pelas Figura 2.10 e Figura 2.11 é possível concluir que os valores médios da corrente e tensão na carga,
assim como o valor médio da corrente na bobina L são
V0 ≈ 24 V '0 ≈ 41,6 � '+ ≈ 46,5�
O que está de acordo com os valores obtidos no dimensionamento. Também se pode verificar que o valor
da tensão na bobina é igual a 207 V ou 24 V, dependendo do sinal de comando dos IGBTs como seria de esperar
pela equação (2.3).
Observa-se que estas grandezas têm associado o tremor típico dos conversores comutados. Este tremor
pode ser observado na Figura 2.12.
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.020
20
40
60
Tempo [s]
Cor
rent
e na
Car
ga [
A]
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.020
10
20
30
Tempo(s)
Ten
sao
da C
arga
[V
]
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.020
20
40
60
Tempo [s]
Cor
rent
e na
Bob
ina
[A]
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-100
0
100
200
300
Tempo(s)
Ten
sao
da B
obin
a [V
]

25
Figura 2.12 – Ondulação da tensão na carga e da corrente da bobina.
Na Figura 2.12 constata-se que quando a corrente na bobina aumenta, a tensão de saída diminui, tal
como anteriormente verificado. Quando Q1 e Q2 estão em condução é armazenada energia na bobina L e o
condensador C descarrega na resistência de carga. Quando Q1 e Q2 estão ao corte a energia armazenada na
bobina L é transferida para o condensador C, diminuindo consequentemente a corrente na bobina e aumentando a
tensão de saída. Esta situação leva a que se verifique a existência de tremor nestas grandezas, encontrando-se
estes dentro dos limites calculados no dimensionamento. Com base na Figura 2.12 também se pode observar que a
frequência de comutação dos semicondutores está próxima da calculada no dimensionamento.
A Figura 2.13 representa uma variação repentina da carga, passando o valor da carga para perto do valor
que leva a uma situação de regime lacunar.
Figura 2.13 –Tensão e corrente na carga, com mudança brusca do valor da carga.
A partir da simulação conclui-se que no instante de comutação de carga, existe um pico de tensão, não
sendo esta situação aceitável. O valor do condensador de saída atrás calculado é válido para um regime de
operação de pequenas perturbações. Para regimes de operação com grandes perturbações, como se verifica
quando existe uma variação brusca da cagar, é necessário calcular o valor do condensador de saída de outra forma.
0.0495 0.0496 0.0497 0.0498 0.0499 0.0546
47
48
49
Tempo [s]C
orre
nte
na B
obin
a [A
]
0.0495 0.0496 0.0497 0.0498 0.0499 0.05
23.8
23.9
24
24.1
Tempo(s)
Ten
sao
da C
arga
[V
]
0 0.05 0.1 0.150
20
40
60
Tempo [s]
Cor
rent
e na
Car
ga [
A]
0 0.05 0.1 0.150
20
40
60
Tempo(s)
Ten
sao
da C
arga
[V
]

26
2.6 Redimensionamento da capacidade de saída
Considerando uma mudança na carga que origine a passagem da corrente de um valor praticamente nulo
para o valor da carga nominal, obtém-se a partir da expressão linearizada da corrente no condensador, '* = � ∆��∆@ ,
uma expressão para o valor do condensador, em que ∆P é o tempo de estabelecimento da corrente na bobina e ∆V0 é a variação da tensão na carga na situação descrita.
� = <0∆PV0∆V0 (2.47)
Como este conversor tem um controlo interno da corrente na bobina L, e é necessário aumentar a corrente
na bobina, os transístores Q1 e Q2 vão e portanto a expressão para a corrente na bobina é
'+ = TU)8 ∆P (2.48)
Através da relação (2.10)
'01 − _ = TU)8 ∆P ⇔ ΔP = '08TU)(1 − _) (2.49)
Das expressões (2.47) e (2.49) obtém-se uma expressão para o cálculo do valor do condensador para
regimes de grandes perturbações
� = <0;V0;ΔV08TU)(1 − _)
(2.50)
A alteração do valor do condensador causa a alteração dos parâmetros associados ao controlo do
conversor. Para um valor de ∆V0 = 10% e o valor de δ atrás calculado obtém-se os seguintes valores
� = 0,0169 ¼J́ = 0,0097 ¤

27
2.7 Verificação do valor da capacidade de saída
A simulação do conversor com a alteração do valor do condensador está patente na Figura 2.14
Figura 2.14 – Tensão e corrente na carga, com mudança brusca do valor da carga e novo valor de condensador.
Por análise da figura observa-se que comparativamente com a figura 2.13 a variação da tensão na carga é
bastante inferior, tanto quando se dá um aumento brusco de carga, como uma diminuição brusca. Observa-se
também que a variação da tensão está dentro do valor definido.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
20
40
60
Tempo [s]
Cor
rent
e na
Car
ga [
A]
0 0.05 0.1 0.150
10
20
30
5
15
25
Tempo(s)
Ten
sao
da C
arga
[V
]

28
3. Rectificador monofásico de onda completa e Conversor Redutor Elevado
O conversor redutor elevador anteriormente estudado é um conversor de contínuo para contínuo. Sendo
assim, utiliza-se um rectificador monofásico de onda completa que permite, a partir de uma fonte de tensão
alternada, obter uma tensão contínua na entrada do redutor elevador. Este conversor está representado na Figura
3.1.
Figura 3.1 – Rectificador monofásico de onda completa
3.1 Análise do Rectificador monofásico de onda completa.
Este conversor é constituído por quatro díodos, sendo que os díodos D1 e D4 conduzem, durante metade
do período da fonte AC, nas alternâncias positivas, enquanto os díodos D2 e D3 estão em condução durante as
alternâncias negativas da fonte AC.
A Figura 3.2 ilustra a situação em que a tensão AC é positiva.
Figura 3.2 – Rectificador monofásico de onda completa, com Vi> 0
A partir da análise da Figura 3.2 é possível concluir que de (0+KT) a (π + KT)

29
TU) = V()½() = ½/ (3.1)
O intervalo de (π + KT) a (2π + KT) está ilustrado na Figura 3.3.
Figura 3.3 – Rectificador monofásico de onda completa, com Vi <0
Por análise da figura conclui-se
TU) = −V()½() = −½/ (3.2)
Com base nas expressões (3.1) e (3.2) e sendo V() = √2 ∙ V- sin jP é possível afirmar que a forma de
onda UDC é uma sinusoide duplamente rectificada, podendo o seu valor médio ser calculado da seguinte forma [3]
TU) = 1J x √2V- |sin jP|;À0 yjP
o que se pode reescrever como
TU) = 1J x √2V- sin jP yjP = 2√2V- ÁÀ0
(3.3)
Substituíndo em (3.3) o valor eficaz da tensão da rede, obtém-se o valor de 207 V para o valor de TU)
Para analisar o valor médio e o valor de pico da corrente IU é preciso ter em conta a que a carga do
rectificador monofásico é o conversor redutor elevador anteriormente estudado. Esta situação está representada na
Figura 3.4.

30
Figura 3.4 – Rectificador monofásico de onda completa e conversor DC/DC redutor elevador.
Analisando a Figura 3.4 e sabendo e sabendo que existe um controlo interno da corrente IL no conversor
redutor elevador é possível concluir que o valor médio da corrente de saída do rectificador é igual ao valor médio da
corrente IU calculada para o conversor redutor elevador. Esta situação permite o cálculo do valor médio da corrente
IU através da expressão (2.10). Igualmente conclui-se que o valor de pico da corrente IU vai ser igual ao valor médio
da corrente IL, o que corresponde ao caso em que Q1 conduz, como se observa na Figura 3.4.
3.2 Dimensionamento do Rectificador monofásico de onda completa
A partir da análise anteriormente realizada é agora possível dimensionar os díodos a utilizar para a
implementação do rectificador monofásico. O valor de corrente e tensão a suportar é igual para os quatro díodos,
apresentando-se por isso o dimensionamento apenas para o díodo D1.
Recorrendo à Figura 3.2 pode-se concluir que a corrente de condução de D1 é igual à corrente UDC. Logo
pode-se escrever
½U�tu = ½/tu½U�·Â�à = ½/·Â�à = ½+tu (3.4)
Observa-se, com base Figura 3.3, que o díodo D1, quando está ao corte, vai ser sujeito à tensão –Vi,
donde se conclui que o valor máximo de tensão inversa a suportar pelo díodo é igual ao valor de pico da tensão de
entrada.
Para o díodo D1 os valores de corrente e tensão a suportar são os seguintes
D1 VRRM = V()ÄtÅ = √2 ∙ 230 = 325 V
ID1pico = IL = 46,5 A
ID1av = IU = 4,55 A
A estes valores deve ser acrescido um factor de segurança de 50% a 100% no momento da escolha dos
componentes físicos.
31
Pode-se inferir que a corrente na entrada do conversor redutor elevador é uma corrente impulsiva. Esta
situação justifica-se pelo facto de apenas existir corrente à saída do rectificador quando o IGBT Q1 se encontra em
estado de condução, caso contrário a corrente seria nula. Como se observou nas equações (3.1) e (3.2) a corrente
de entrada do rectificador vai ser igual a IU de 0 a π e igual a –IU de π a 2π esta também é impulsiva. Nesta
situação, embora a forma de onda AC da tensão e da corrente estejam em fase, o elevado conteúdo harmónico da
corrente origine um factor de potência reduzido, o que tendo em conta o objectivo do trabalho, não é aceitável.
Com o intuito de resolver estes problemas passar-se-á a controlar a corrente de saída do rectificador de
modo a que esta apresente a forma de onda de uma sinusóide rectificada. Adiconalmente será necessário
dimensionar um filtro para remover a componente de alta frequência da corrente alternada.
3.3 Filtro de Entrada
As normas internacionais impõem um limite máximo para a injecção de harmónicas na rede. O filtro de
entrada é usado para reduzir as harmónicas de alta frequência da corrente injectada na rede eléctrica. Recorrendo a
um filtro LC pode-se garantir esta condição. O filtro de entrada deve ser dimensionado com o objectivo de obter uma
boa relação entre preço, tamanho e o seu desempenho. O mau dimensionamento do filtro pode prejudicar a
totalidade do sistema.
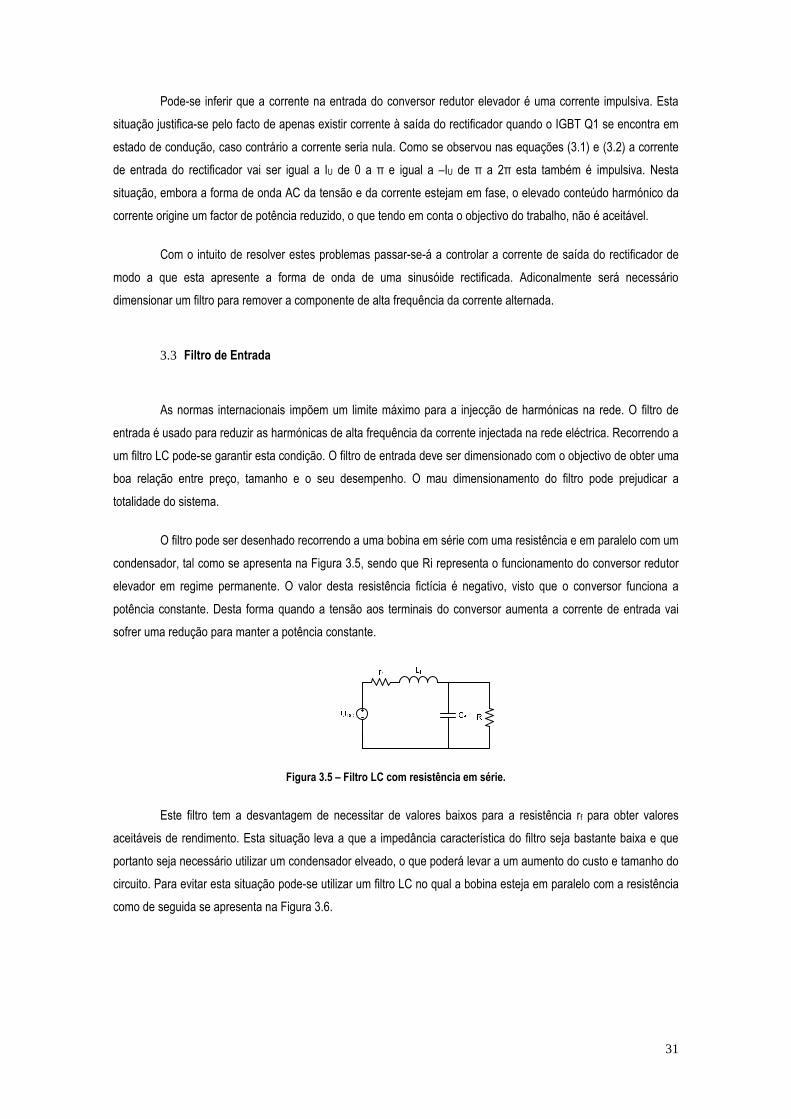
O filtro pode ser desenhado recorrendo a uma bobina em série com uma resistência e em paralelo com um
condensador, tal como se apresenta na Figura 3.5, sendo que Ri representa o funcionamento do conversor redutor
elevador em regime permanente. O valor desta resistência fictícia é negativo, visto que o conversor funciona a
potência constante. Desta forma quando a tensão aos terminais do conversor aumenta a corrente de entrada vai
sofrer uma redução para manter a potência constante.
Figura 3.5 – Filtro LC com resistência em série.
Este filtro tem a desvantagem de necessitar de valores baixos para a resistência rf para obter valores
aceitáveis de rendimento. Esta situação leva a que a impedância característica do filtro seja bastante baixa e que
portanto seja necessário utilizar um condensador elveado, o que poderá levar a um aumento do custo e tamanho do
circuito. Para evitar esta situação pode-se utilizar um filtro LC no qual a bobina esteja em paralelo com a resistência
como de seguida se apresenta na Figura 3.6.

32
Figura 3.6 – LC com resistência em paralelo.
Para dimensionar o filtro LC começa-se por examinar a sua função de transferência [6]
T*(¤)TU)(¤) =
G�¤� G� + 1¤8 I ¤8 + I + G�¤� G� + 1 (3.5)
o que pode ser reescrito como
T*(¤)TU)(¤) =1� 8 Ƥ8 I + 1Ç
¤; + ¤ G� + I � G�I + 1� 8 =
1� 8 Ƥ8 I + 1Ç
¤; + ¤ È8 � Æ G�I G� + I Ç È 1� 8 + 1� 8
(3.6)
Por análise de (3.6) conclui-se que 2i = È8 � ¡ G'I G'+I ¢ e também que para este sistema ser estável é preciso
garantir
G�I G� + I > 0 ⇒ I < −G� (3.7)
Para minimizar a influência do zero da função de transferência deve-se verificar L7 ≥ 1 e sabendo que
\ = É+X)X
I 8 = L7i 1Ê� 8 ⟺ I = L7i\ ⇒ \ < −G�L7i (3.8)
O valor da resistência pode ser escrito em função do coeficiente de amortecimento

33
2j7i = G� + I � G�I ⇔ I = 12j7i� G� − 1 = G�\ 2iG� − \ (3.9)
A partir das expressões (3.8) e (3.9) obtém-se as seguintes relações
\ = �2i;L7 − 1�iL7 G�
L7 ≤ 12i; (3.10)
É possível determinar o valor de Ri da seguinte forma [6]
G� = yTU)y½/ (3.11)
Sabendo que TU) = ÍÎ��Ï , a expressão (3.11) fica igual a
G� = yy½/ Æ`<0½/ Ç = − `<0½/; (3.12)
Recorrendo à expressão (2.9) pode-se ainda escrever
G� = − `<0½0;_; (1 − _); = − `G0_; (1 − _); (3.13)
Recorrendo à equação (3.13) calcula-se o valor de Ri
G� = −45,1359 Ω
Utilizando as expressões calculadas anteriormente é possível obter o valor dos vários componentes do
filtro. Sendo assim, escolhe-se o valor de 0,7 para o coeficiente de amortecimento, uma vez que este valor permite
uma resposta rápida do sistema não apresentando uma sobreelevação muito acentuada.
L7 = 0.752Ð; ≈ 0,7653\ ≈ 21,0634 ΩI = 11,284 Ω
Verifica-se que o valor calculado para rf está dentro dos limites impostos pela expressão (3.7).
O valor do condensador e da bobina podem ser calculados com base na frequência de corte. A frequência
de corte é escolhida para eliminar a componente de alta frequência da corrente. Estas harmónicas devem-se à
comutação dos semicondutores. No caso do conversor redutor elevador a frequência de comutação é de cerca de
25 kHz. Portanto escolhe-se para frequência de comutação o valor de 800 Hz, com o objectivo de se conseguir uma
atenuação de pouco menos que 40 dB nas harmónicas da mesma ordem de grandeza da frequência de comutação.

34
� = 1\ j 8 = \ j
(3.14)
Substituindo na equação anterior
� = 9,445 × 10�Ñ ¼8 = 0,0042 L
Usando os valores calculados pode-se obter o diagrama de Bode e o mapa de pólos e zeros deste filtro,
que se encontram representados na Figura 3.7.
Figura 3.7 – Diagrama de Bode e representação no plano complexo dos pólos e zeros para o filtro LC com resistência em paralelo.
Constata-se que o sistema é estável já que os pólos e zeros em cadeia aberta se encontram no semiplano
complexo esquerdo, como seria de esperar, tendo em conta que se verificou a inequação (3.7). Observa-se pelo
diagrama de Bode da Figura 3.7 que este filtro, embora seja de segunda ordem não apresenta uma atenuação de
40dB por década, o que se deve à proximidade do zero em relação aos pólos do sistema, como se observa no
diagrama de pólos-zeros.
Pole-Zero Map
Real Axis
Imag
inar
y A
xis
Bode Diagram
Frequency (rad/sec)
-4000 -3500 -3000 -2500 -2000 -1500 -1000 -500 0-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
102
103
104
105
-90
-45
0
45
Pha
se (
deg)
-20
-10
0
From: UAC Voltage Source To: Ub: Cf
Mag
nitu
de (
dB)

35
Embora este filtro necessita de valores de bobina e condensador inferiores ao filtro com a resistência em
série, o filtro apresenta uma atenuação de alta frequência mais reduzida, comportando-se praticamente como um
filtro de primeira ordem. Para melhorar a resposta de alta frequência do filtro adiciona-se uma bobina em série com
a resistência rf, obtendo o filtro que está representado na Figura 3.8
Lf
Cf RiUDC
rf
Uc
IU
L2
Figura 3.8 – Filtro LC com bobina de alta frequência.
A função de transferência do novo filtro é a seguinte [6]
T*(¤)TU)(¤) =
G�¤� G� + 1¤8 �¤8; + I �¤8 + ¤8; + I + G�¤� G� + 1 (3.15)
podendo ainda ser escrita como
T*(¤)TU)(¤) =
I � 8 8; Ƥ Æ8 + 8;I Ç + 1Ç¤Ò + 8; + � I G�� 8;G� ¤; + ¤ 8 I + G��8 + 8;�� 8 8;I + I � 8 8;
(3.16)
Escolhendo 8; = +XÓ� obtém-se para altas frequências o paralelo destas duas bobinas, que será igual a
+X(�ÔÓ�).[6] Escolhendo L+=10, o valor de 8; vai ser igual a 4,2 × 10�£ L.
Para verificar em que condições é que este sistema é estável pode-se aplicar o critério de Routh-
Hurwitz [7]
Õ0 = I �� 8 8;� > 0Õ� = 8 I + G��8 + 8;�� 8 8;I > 0
Õ; = 8; + � I G�� 8;G� > 0Õ;Õ� − Õ0Õ; > 0 (3.17)
Substituindo os valores atrás calculados na expressão (3.17)

36
Õ0 = 6.8037��� > 0Õ� = 2.1476�® > 0Õ; = 2.4582�£ > 0ÕÒ = 1 > 0Õ;Õ� − Õ0ÕÒÕ; = 5.2793��; > 0
Visto que todos os valores são maiores que zero e portanto não existe nenhuma mudança de sinal,
conclui-se o sistema é estável.
Na Figura 3.9 está representado o diagrama de Bode e o diagrama de pólos e zeros para este filtro.
Figura 3.9 – Diagrama de Bode e representação no plano complexo dos pólos e zeros para o filtro LC com bobina de alta frequência.
Verifica-se no diagrama de pólos e zeros que existe mais um pólo em relação ao diagrama da Figura 3.7.
Esta situação deve-se à adição da bobina em série com a resistência, estando este pólo mais afastado em relação
ao zero. No diagrama de Bode da Figura 3.9 observa-se que existe uma atenuação de 40dB por década, resultado
da adição de um novo pólo, o que representa uma clara melhoria face ao caso anterior. Os pólos e zeros existentes
estão todos no semiplano complexo esquerdo, o que permite inferir que o sistema é estável, confirmando a
validação recorrendo ao critério de Routh-Hurwitz.
Embora este filtro tenha sido projectado para ser utilizado à entrada do conversor redutor elevador, ir-se-á
utilizá-lo no lado alternado da montagem. O facto de a corrente ser alternado dificulta que a bobina sature, tornando-
se por isso mais barato a produção da bobina para uma grandeza alternada quando comparado com uma grandeza
contínua de igual valor.
Pole-Zero Map
Real Axis
Imag
inar
y A
xis
Bode Diagram
Frequency (rad/sec)
-12000 -10000 -8000 -6000 -4000 -2000 0
-5000
0
5000
102
103
104
105
-180-135-90-45
045
Pha
se (
deg)
-40
-20
0
From: UAC Voltage Source To: Ub: Ri
Mag
nitu
de (
dB)

37
3.4 Controlo de corrente
No capítulo 3 observou-se que a corrente alternada, embora aparentemente em fase com a tensão da
fonte AC não apresenta uma forma de onda sinusoidal sendo impulsiva, o que conduz a uma grande distorção
harmónica e consequentemente um baixo valor para o factor de potência.
Para resolver estes problemas foi dimensionado um filtro de entrada e passar-se-á agora a controlar a
corrente de entrada do conversor redutor elevador, de modo a que esta apresenta a forma de onda igual a uma
sinusóide duplamente rectificada.
Figura 3.10 – Rectificador monofásico de onda completa e conversor DC/DC redutor elevador com filtro de entrada.
3.5 Controlo do Rectificador de factor de potência unitário
Para evitar o aumento do número de semicondutores controlados opta-se por apenas controlar a corrente
IU. Não seria possível controlar ambas as correntes com os semicondutores controlados disponíveis, visto que para
aumentar a corrente na bobina é necessário que o IGBT Q1 conduza, contudo esta situação leva ao aumento da
corrente AC. Quando o IGBT Q1 está ao corte a corrente IU é nula, logo IH também o será, o que leva a que não
exista forma de influenciar o valor de IAC. Neste caso a bobina vai descarregar na carga.
Considerando o filtro ideal vai-se controlar o valor médio de IU (porque é variável descontínua), ou seja
1J x �'/,- − '/�yP = 0@
0 (3.18)
Tendo em conta a Figura 3.10
'/,- = '(),- − '* = '(),- − � yW*XyP (3.19)

38
Sabendo que o objectivo é obter na fonte alternada uma corrente sinusoidal em fase com a tensão e
considerando que a tensão tem fase nula
'(),- = '() sin(jP) (3.20)
Substituindo em (3.18)
1J x ¡'() sin(jP) − � yW*XyP − '/¢ yP@
0 = 0 (3.21)
Que pode ser reescrito como
1J x ('() sin(jP) − '/)yP − � J ÖW*X(P) − W*X(0)× = 0@
0 (3.22)
Considerando W*X(0) = 0
1J wx ('() sin(jP) − '/)yP − � W*X
@0 { = 0 (3.23)
Como se observou no capítulo 3, '/ = |'Ó| e tendo em conta que o filtro é considerado como ideal
W*X ≈ √2V()- ·, § que permite obter uma lei de controlo para a corrente '/ .
µ = 1J wx (|'() sin(jP)| − '/)yP − � W*X@
0 { = 0 (3.24)
E tendo em conta os estados de funcionamento deste conversor pode-se escrever
s µ > Ù ⇒ '() ↑⇒ e = 1, ¥1 � ¥2 ÚÛ µ < −Ù ⇒ '() ↓⇒ e = 0, M1 � M2 ÚÛq (3.25)
O que pode ser implementado recorrendo a um comparador de histerese como o que se apresenta na
Figura 3.11
Figura 3.11 – Comparador de histerese.
Tendo uma lei de controlo para a corrente IU pode-se agora projectar um controlo de tensão com controlo
interno da corrente IU
1
0 e -e

39
Tendo em conta que a corrente IU está controlada, o conversor pode ser visto como
Figura 3.12 – Circuito equivalente do conversor redutor elevador com corrente IU controlada
O valor de γ pode ser obtido tendo em conta a relação entre as potências de entrada e de saída
'0 = `W()- '()- V0 (3.26)
Tendo em conta a Figura 3.12
� yW0yP = e'/ − W0G0 (3.27)
E visto que se vai controlar v0 e a corrente IU está controlada
V0 = V0,- ⇒ � yV0yP = 0 ⇒ e'/ = V0G0'/ = '/,- ⇒ '/ = |'�*| (3.28)
O que permite obter o valor médio de γ
e�� = `W()- V0 (3.29)
Recorrendo às expressões (2.43) e (2.45) e aos valores calculados para C e L obtém-se os parâmetros
necessários para o dimensionamento do compensador.
JK = 2,5952 × 10�£ ¤
J́ = 3,9316 × 10�£ ¤
J7 = 0,0016 ¤

40
Adicionalmente, analisando o conversor redutor elevador com a corrente Iu controlada chega-se à
conclusão que utilizando este circuito no modo redutor, com o mesmo número de semicondutores comandados,
pode-se aproveitar mais um estado de operação para além dos já enunciados (Q1Q2 ON ou D1D2 ON).
Figura 3.13 – Conversor DC/DC redutor elevador.
Observando a Figura 3.13 e tendo em conta o controlo feito da corrente IU observa-se que para aumentar
a corrente IU é necessário que Q1 esteja em condução. Por analogia verifica-se que estando Q1 ao corte IU vai
diminuir.
Tabela 2 – Tabela de estados.
Modo de
Funcionamento Estado de Q1 Estado de Q2 Evolução de IU Evolução de ID
1 ON ON '/ ↑ 'U = 0
2 ON OFF iÜ ↑ iÝ ↑, se UDC>V0
3 OFF ON iÜ ↓ iÝ = 0
4 OFF OFF iÜ ↓ iÝ ↓
Pela Tabela 2 constata-se que estando Q1 em condução é possível utilizar Q2 ao corte para permitir
simultaneamente aumentar IU e ter corrente ID diferente de zero, levando a um aumento da tensão na carga (como o
conversor está a ser usado com um factor de ciclo inferior a 0.5 vai comportar-se como um conversor redutor e
portanto UDC> V0).
Usando o comando do semicondutor Q1 e o sinal do erro da tensão de saída pode-se adicionar lógica
extra para se utilizar o modo de funcionamento S1 ON e S2 OFF.
Para se obter o sinal do erro da tensão na carga recorre-se a um comparador de histerese.
41
s��� > Ù ⇒ Þ�� = 1��� < Ù ⇒ Þ�� = 0q (3.30)
É possível implementar o modo de funcionamento 2 recorrendo à seguinte lógica
Figura 3.14 – Sinal de comando para o semicondutor Q2.
É preciso ter em atenção que com a implementação deste modo de funcionamento adicional vão existir
instantes em que o dispositivo semicondutor Q2 ficará sujeito à tensão da rede, o que implica que a tensão Vce terá
de ser no mínimo igual ao valor médio da tensão UDC, que é 207V. A este valor deve ser aplicado um factor de
segurança de 50% a 100%.
Como agora a corrente na bobina L já não é controlada, já não é possível garantir a variação do valor da
corrente iL calculado no capítulo 2. Além disso como a tensão de entrada do conversor redutor elevador é um
sinusoíde duplamente rectificada é expectável que a corrente na bobina L apresente um período de 100 Hz. Desta
forma, surge a necessidade de recalcular os valores de C e L para a situação em que a corrente IU está controlada e
não a corrente IL.
3.6 Redimensionamento dos valores da bobina e do condensador
Embora se esteja a controlar a corrente IU, a expressão (2.27) anteriormente calculada para a obtenção do
valor da bobina L continua a ser válida, no entanto é necessário alterar os parâmetros a utilizar para o cálculo da
mesma.
Na situação em que a corrente da bobina L não está controlada é expectável um aumento da variação da
mesma. Por este motivo considera-se um valor mais elevado para Δ'+ . Para além disto a corrente na bobina
apresenta um período igual ao de uma sinusóide, com frequência 50Hz, rectificada.
O cálculo da bobina será feito com os valores Δ'+ = 50% e T=1/100. Substituindo estes valores na
expressão (2.27), o valor calculado para a bobina é
8 = 0,0093 L
beta
1NOT
AND
Gama2
Evo
1

42
Para o cálculo do valor do condensador é preciso ter em conta que o rectificador irá apresentar um factor
de potência unitário e portanto a corrente da fonte AC vai ser alternada sinusoidal. O rectificador de factor de
potência unitário pode ser esquematicamente representado da seguinte forma
Figura 3.15 – Esquema do Rectificador de factor de potência unitário.
A potência instantânea fornecida pela fonte AC é
%� = √2V()- sin jP . √2½()- ߺá sin jP = 2V()- ½()- ߺá sin(jP);
Assumindo rendimento unitário
<� = <0 ⇔ V()- ½()- ߺá = V0½0
A potência instantânea da fonte DC é
%0 = `. %� = 2`. V()- ½()- ߺá sin(jP); = 2`. <0 sin(jP);%0 = V0.'U�� (3.31)
A expressão (3.29) permite determinar uma expressão para 'U��
'U�� = 2`. <0V0 sin(jP); (3.32)
Que se pode reescrever como
'U�� = '0�� − '0�� cos(2jP) (3.33)
Recorrendo à lei dos nós
')�� = 'U�� − '0�� = −'0�� cos(2jP) (3.34)
A variação da tensão na carga vai ser igual a
ΔV0 = Δ¥� = 1j� x −'0�� cos(2jP) yP =ÒÀ£À£
'0��j� (3.35)
Considerando uma variação de 10% na tensão de carga e substituindo os restantes valores na expressão
(3.35) calcula-se o valor do condensador a utilizar

43
� = 0,0533 ¼
Com a alteração dos valores do condensador e da indutância é preciso recalcular os parâmetros do
compensador proporcional integral. O valor de Td vai ser bastante superior ao caso anterior (capítulo 2) devido à
frequência associada à corrente de entrada do conversor redutor elevador.
JK = 1/100 ¤
J́ = 0,318 ¤
J7 = 0,0105 ¤
Com estes dados é agora possível realizar o ensaio final do conversor redutor elevador.

44
4. Ensaio por simulação do Rectificador de Factor de Potência Unitário
Após o estudo realizado nos capítulos anteriores possui-se todos os dados necessários para ensaiar o
rectificador estudado. Espera-se obter um valor de tensão constante na carga com oscilação reduzida. Do lado
da fonte alternada é esperado a obtenção de factor de potência unitário e uma corrente com uma forma de
onda muito próxima da sinusóide.
4.1 Ensaio do Rectificador de Factor de Potência Unitário como redutor sem filtro de entrada e
com a corrente da bobina L controlada
Considerando o controlo de corrente da bobina L do conversor redutor elevador e substituindo a fonte DC
pelo rectificador de onda completa obtém-se as seguintes formas de onda. O diagrama de blocos do
MATLAB/Simulink encontra-se no anexo B.
Figura 4.1 – Evolução da tensão e corrente na carga.
Figura 4.2 – Evolução da tensão e corrente na carga.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.080
20
40
60
Tempo [s]
Cor
rent
e na
car
ga [A]
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.080
10
20
30
Tempo(s)
Ten
sao
na c
arga
[V]
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.080
20
40
60
80
Tempo [s]
Cor
rent
e na
bob
ina
[A]
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
0
100
200
300
Tempo(s)
Ten
sao
na b
obin
a [V
]

45
Observa-se, nas figuras anteriores que a tensão na carga, assim como a corrente, apresentam uma
oscilação superior com a inclusão do rectificador monofásico de onda completa. Esta situação é o resultado de a
tensão de entrada do conversor já não ser contínua, mas sim uma grandeza com a forma de onda de uma sinusóide
rectificada, como se observa na Figura 4.3. No entanto é de salientar que utilizando o controlo de corrente do
capítulo 2 é possível obter uma tensão próxima dos 24 V na carga.
Nas figuras seguintes apresentam-se a evolução da corrente e da tensões à saída do rectificador, assim
como a evolução da corrente e tensão do lado alternado.
Figura 4.3 – Evolução da tensão e da corrente à saída do rectificador
Figura 4.4 – Evolução da tensão e corrente no lado AC.
Na Figura 4.4 constata-se que, tal como esperado, na ausência do filtro de entrada e do controlo da
corrente IU a corrente na fonte alternada não apresenta uma forma de onda sinusoidal sendo impulsiva
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.080
20
40
60
80
Tempo [s]Cor
rent
e à
saíd
a do
Rec
tific
ador
[A
]
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08-200
0
200
400
Tempo(s)Ten
sao
à sa
ída
do R
ectif
icad
or [V
]
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08-100
-50
0
50
100
Tempo [s]
Cor
rent
e na
fon
te A
C [A]
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08-400
-200
0
200
400
Tempo(s)
Ten
sao
da fon
te A
C [V]

46
4.2 Ensaio do Rectificador de Factor de Potência Unitário como redutor com os valores inciais de
L e C
Apresenta-se de seguida a simulação do rectificador de factor de potência unitário com os valor
inicialmente calculados no capítulo 2 para a bobina e o condensador. O diagrama de blocos do MATLAB/Simulink
encontra-se no anexo C.
Figura 4.5 – Evolução da tensão e corrente do conversor na carga.
Figura 4.6 – Evolução da tensão e corrente na bobina L.
Figura 4.7 – Evolução da tensão e corrente de entrada.
0.3 0.31 0.32 0.33 0.34 0.35 0.36 0.37 0.38 0.39 0.430
35
40
45
50
Tempo [s]
Cor
rent
e na
car
ga [
A]
0.3 0.31 0.32 0.33 0.34 0.35 0.36 0.37 0.38 0.39 0.415
20
25
30
Tempo(s)
Ten
sao
da c
arga
[V
]
0.3 0.31 0.32 0.33 0.34 0.35 0.36 0.37 0.38 0.39 0.4-100
0
100
200
Tempo [s]
Cor
rent
e na
bob
ina
[A]
0.3 0.31 0.32 0.33 0.34 0.35 0.36 0.37 0.38 0.39 0.4-200
0
200
400
Tempo(s)
Ten
sao
da b
obin
a [V
]
0.3 0.31 0.32 0.33 0.34 0.35 0.36 0.37 0.38 0.39 0.4-400
-300
-200
-100
0
100
200
300
400
Tempo [s]
Ten
são
e Cor
rent
e na
fon
te A
C

47
Observa-se que a tensão da carga embora varie em torno dos 24V apresenta um tremor inaceitável.
Também se observa que a corrente da fonte AC, embora não seja impulsiva, não tem uma forma de onda
sinusoidal, o que se pode explicar pelo facto de a corrente da bobina se anular. Para além disso verifica-se que a
corrente na bobina L tem um período de 0.01s, o que corresponde a uma frequência de 100Hz, como era esperado.
4.3 Ensaio do Rectificador de Factor de Potência Unitário como Redutor
Apresentam-se de seguida as simulações correspondentes ao ensaio do Rectificador monofásico de factor
de potência unitário. O diagrama de blocos encontra-se no anexo C. Em relação ao caso anterior apenas foi
alterado o valor dos parâmetros L e C tendo sido utilizado os valores obtidos em 3.6.
Figura 4.8 – Evolução da tensão e corrente na carga.
Figura 4.9 – Evolução da tensão e corrente na carga.
0.6 0.61 0.62 0.63 0.64 0.65 0.66 0.67 0.68 0.69 0.738
40
42
44
Tempo [s]
Cor
rent
e na
car
ga [
A]
0.6 0.61 0.62 0.63 0.64 0.65 0.66 0.67 0.68 0.69 0.723
23.5
24
24.5
25
Tempo(s)
Ten
sao
da C
arga
[V
]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.620
40
60
80
100
Tempo [s]
Cor
rent
e na
car
ga [
A]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.615
20
25
Tempo(s)
Ten
sao
da C
arga
[V
]

48
Na Figura 4.8 e Figura 4.9 observa-se a evolução da corrente e da tensão na carga. Verifica-se que a
carga apresenta um valor constante de 24 V tendo um pequeno tremor que se encontra dentro dos limites definidos
para este conversor. No entanto, quando se dá uma variação brusca de carga também se verifica uma variação
brusca na tensão da carga, não sendo possível manter a tensão dentro dos limites anteriormente definidos.
Figura 4.10 – Evolução da tensão e corrente na bobina.
Figura 4.11 – Evolução da tensão e corrente de entrada
A evolução da tensão e corrente na bobina L está patente na Figura 4.9. A corrente da bobina tem tremor
com frequência 100Hz como já se tinha visto anteriormente. Esta frequência é devida à corrente da bobina já não
ser controlada e em seu lugar a corrente IU estar a ser controlada, de modo a que a sua forma de onda seja uma
sinusóide, de frequência 50Hz, duplamente rectificada. A tensão aos terminais da bobina quando Q1 e Q2 estão em
condução não é sempre igual, visto que a alimentação do conversor redutor elevador é uma tensão rectificada e não
uma fonte DC perfeita.
Na Figura 4.11 está representada a evolução da tensão e da corrente na fonte AC. Constata-se que a
forma de onda da corrente é quase sinusoidal, como se pretendia obter, excepto nas passagens por zero. Além
disso também se verifica que a corrente está praticamente em fase com a tensão. Na Figura 4.12 permite observar
0.6 0.61 0.62 0.63 0.64 0.65 0.66 0.67 0.68 0.69 0.738
40
42
44
46
48
Tempo [s]
Cor
rent
e na
bob
ina
[A]
0.6 0.61 0.62 0.63 0.64 0.65 0.66 0.67 0.68 0.69 0.7-100
0
100
200
300
400
Tempo(s)
Ten
sao
da b
obin
a [V
]
0.6 0.61 0.62 0.63 0.64 0.65 0.66 0.67 0.68 0.69 0.7-10
-5
0
5
10
Tempo [s]
Cor
rent
e na
fon
te A
C [A]
0.6 0.61 0.62 0.63 0.64 0.65 0.66 0.67 0.68 0.69 0.7-400
-200
0
200
400
Tempo(s)
Ten
sao
da fon
te A
C [V]

49
a desfasagem entre tensão e corrente em maior pormenor. Pela Figura 4.13 é ainda possível concluir que a taxa de
distorção harmónica (THD) desta corrente é reduzida (THD<6%).
Figura 4.12 – Evolução da tensão e corrente de entrada (expandido).
Figura 4.13 – Espectro de frequências da corrente de entrada.
A Figura 4.12, juntamente com a Figura 4.13 permitem calcular o valor do factor de potência. A
desfasagem f em segundos obtém-se por análise da Figura 4.12. Tendo em conta que o período da corrente e
tensão é 20 ms pode-se escrever a desfasagem em graus.
l = 0,0006 ∗ 3600,02 = 10,8º
Pode-se calcular o valor do factor de potência através da expressão [4]
0.608 0.6085 0.609 0.6095 0.61 0.6105 0.611 0.6115 0.612-5
0
5
Tempo [s]
Cor
rent
e na
fon
te A
C [
A]
0.608 0.6085 0.609 0.6095 0.61 0.6105 0.611 0.6115 0.612-200
-100
0
100
200
Tempo(s)
Ten
sao
da f
onte
AC
[V
]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
-5
0
5
Selected signal: 39.04 cycles. FFT window (in red): 16 cycles
Time (s)
0 1 2 3 4 5
x 104
0
1
2
3
4
Frequency (Hz)
Fundamental (50Hz) = 6.759 , THD= 5.97%
Mag
(%
of
Fun
dam
enta
l)

50
% = 1√JLM; + 1 cos l (4.1)
Utilizando a expressão anterior e os dados recolhidos da Figura 4.12 e Figura 4.13
% = 0,98
O que garante um dos objectivos do trabalho, a obtenção a partir de uma tensão DC constante na carga a
partir de uma fonte alternada, devendo esta apresentar um factor de potência praticamente unitário, ou seja o
rectificador deveria ser visto como uma resistência do ponto de vista da fonte alternada.
É necessário igualmente verificar se a solução proposta apresenta um bom rendimento.
O rendimento pode ser calculado tendo em conta a potência que é fornecida pela fonte alternada em
comparação com a potência que é consumida pela carga. Logo,
`a = <0<� = 1J ã W0'0yPa01J ã W�'�yPa0
Este cálculo foi feito recorrendo-se à simulação do conversor, tendo sido obtido o valor de 90%.
Este valor está abaixo do valor inicialmente proposto de 95%, contudo é necessário ter em conta que esse
valor foi proposto apenas para o conversor redutor elevador. No decorrer do trabalho foi necessário adicionar um
rectificador monofásico de onda completa e um filtro de entrada. Ambos possuem perdas associadas, o que justifica
a não obtenção do valor pretendido.
4.4 Ensaio do Rectificador de Factor de Potência Unitário como Elevador
De seguida o Rectificador de factor de potência unitário vai ser ensaiado com um valor de _ > 0.5, ou
seja em funcionamento como Elevador. Considerar-se-à que a tensão pretendida na carga é de 340 V e que a
potência entregue à carga é à mesma 1 kW.
Para tal é preciso recalcular o valor da resistência de carga, assim como alguns parâmetros associados ao
controlo da tensão de carga. Pela expressão (2.6)
G0 = 115,6 Ω
Tendo em conta a expressão (2.44) os parâmetros do filtro são

51
J́ = 6,3883 ¤J7 = 2,1049 ¤
Simulando o conversor obtém-se os seguintes resultados
Figura 4.14 – Regime permanente da tensão e corrente na carga, em funcionamento elevador.
Por observação da figura anterior conclui-se que a tensão na carga vai ser igual à referência desejada de
340 V. O regime permanente não apresenta grandes oscilações porque o condensador de saída para este caso é
bastante superior ao necessário. Da equação (3.35) pode-se constatar que o aumento da tensão de saída leva à
diminuição do valor de capacidade necessário.
Na figura seguinte representa-se a evolução da corrente e tensão na fonte AC, assim como a análise da
corrente na frequência.
Figura 4.15 – Evolução da tensão e corrente de entrada, em funcionamento elevador.
0.8 0.82 0.84 0.86 0.88 0.9 0.92 0.94 0.96 0.98 10
1
2
3
4
Tempo [s]
Cor
rent
e na
Car
ga [
A]
0.8 0.82 0.84 0.86 0.88 0.9 0.92 0.94 0.96 0.98 10
100
200
300
400
Tempo(s)
Ten
sao
da C
arga
[V
]
0.8 0.82 0.84 0.86 0.88 0.9 0.92 0.94 0.96 0.98 1-400 -200
0
200 400
Tempo [s]
0.8 0.82 0.84 0.86 0.88 0.9 0.92 0.94 0.96 0.98 1-10
-5 0
5
10
Tempo(s)

52
Figura 4.16 – Espectro de frequências da corrente de entrada.
Como se pode observar a corrente na fonte alternada vai ter uma forma de onda sinusoidal e uma taxa de
distorção harmónica baixa como se desejava. Também se observa que a corrente está praticamente em fase com a
tensão o que permite obter um valor próximo da unidade para o factor de potência.

53
5. Conclusões
A utilização de conversores AC/DC tem aumentado significativamente ao longo dos último anos. Estes
conversores apresentam vantagens ao nível do tamanho, peso, custo e rendimento, o que levou a que fossem
amplamente usados em contextos industriais, comerciais e residenciais. No entanto, estes conversores pedem à
rede eléctrica uma corrente com elevado valor de THD, o que degrada significativamente o factor de potência e a
distorção harmónica da corrente.
No início deste trabalho começou por se identificar técnicas que permitam fazer a correcção do factor de
potência. Estes processos podem ser divididos em dois grandes grupos, técnicas de correcção passiva do factor de
potência, com recurso a filtros, e técnicas de correcção activa do factor de potência, sobre o qual este trabalho
incide.
As técnicas de correcção activa do factor de potência podem ser dividas entre técnicas por modulação de
largura de impulso, técnicas de correcção do factor de potência por ressonância e técnicas de comutação suave.
Prosseguiu-se para a análise das principais vantagens e desvantagens das técnicas por modulação de largura de
impulso para diferentes topologias, entre estas, redutor, elevador e redutor elevador, tendo este trabalho sido
realizado recorrendo a uma topologia redutor elevador.
Começa-se, no capítulo 2, a estudar o conversor DC/DC com topologia redutor elevador. Elabora-se um
controlo de tensão com controlo interno da corrente da bobina L. De seguida, observa-se a resposta do sistema e
valida-se que o valor médio da tensão segue a referência de 24 V e que está dentro dos limites de ondulação.
Testa-se de seguida a resposta do circuito em situações de variação brusca de carga, levando à necessidade de
recalcular o condensador do circuito.
No capítulo seguinte (capítulo 3) introduz-se o rectificador monofásico, calculando-se os valores de tensão
e corrente que os dispositivos semicondutores terão de suportar. Tendo em conta o carácter impulsivo da corrente
pedido à rede por um rectificador monofásico dimensiona-se um filtro de entrada que permita eliminar a componente
de alta frequência da corrente na fonte alternada.. Seguidamente opta-se por controlar apenas a corrente IU, de
modo a que esta siga a forma de onda de uma sinusoíde duplamente rectificada e por conseguinte obter-se uma
corrente alternada na fonte AC. Devido à alteração ao controlo da corrente surge a necessidade de dimensionar de
novo os componentes reactivos, ou seja, a bobina L e o condensador C do conversor DC/DC.
No capítulo 4 começa-se por simular o conversor DC/DC juntamente com o rectificador e constata-se que
o valor médio da tensão é igual à referência de tensão, surgindo uma maior ondulação da tensão do que o calculado
no capítulo 2. A corrente alternada, embora esteja em fase é ser impulsiva. Seguidamente inclue-se o filtro de
entrada e passa-se a controlar a corrente IU, no entanto não se altera os parâmetros de L e C, observando-se uma
grande oscilação na corrente de saída. A corrente de entrada, embora não seja impulsiva, não apresenta uma forma
de onda sinusoidal, o que se deve à necessidade de redimensionar a bobina e o condensador.

54
Finalmente simula-se o sistema filtro de entrada, rectificador monofásico AC/DC e conversor DC/DC, com
os novos valores de L e C. Começa-se por simular o sistema para um valor de factor de ciclo inferior a 0,5, isto é, o
conversor DC/DC opera como um conversor redutor. Neste caso, verifica-se que a tensão na carga tem valor médio
igual à referência (24 V) e que a ondulação em regime permanente é reduzida e está dentro dos parâmetros
definidos, contudo uma variação brusca na carga origina uma alteração acentuada do valor da tensão. Nesta
simulação também se observa a corrente da fonte alternada, concluindo-se que esta tem uma forma de onda muito
próxima da sinusoidal (THD = 5,97%) e que está praticamente em fase com a tensão da rede. A partir da simulação
realizada determinou-se um factor de potência de 0.98 e um rendimento de 90%.
De seguida, simula-se o sistema para um valor de factor de ciclo superior a 0,5, o que significa que o
conversor DC/DC funcionará como um conversor elevador. Novamente, verifica-se que a tensão na carga segue a
referência indicada e que a corrente da rede tem uma baixa distorção harmónica e está em praticamente em fase
com a tensão da rede.
Esta sequência de operações permitiu estudar e dimensionar o rectificador monofásico de factor de
potência unitário recorrendo a uma topologia redutor elevador. Constata-se que o rectificador, utilizando um número
reduzido de semicondutores, apresenta as vantagens enunciadas no capítulo 1. Este rectificador permite obter na
carga tensões superiores ou inferiores ao valor eficaz da tensão na rede. Também permite isolar a carga da rede em
caso de curto-circuito e limitar os crescimentos abruptos da corrente na rede. No entanto, este conversor utiliza um
condensador na carga muito elevado (C = 0.0553 F).

55
6. Bibliografia
[1] A. K. Jha, B. G. Fernandes e A. Kishore, ‘A Single Phase Single Stage AC/DC Converter with High Input Power
Factor and Tight Output Voltage Regulation’, Progress In Electromagnetics Research Symposium 2006, Cambridge,
USA, March 26-29
[2] V. Fernão Pires e J.F. Alves da Silva, ‘Rectificadores com factor de potência quase unitário’
[3] F. Labriqué, J. Santana, Electrónica de Potência, F. Calouste Gulbenkian, 1991
[4] J.F. Alves da Silva, Projecto de Conversores Comutados, Instituto Superior Técnico, 2006
[5] J.F. Alves da Silva, Electrónica Industrial, F. Calouste Gulbenkian, 1998
[6] J.F. Alves da Silva, Textos de apoio da disciplina de Electrónica de Regulação e Comando, Instituto Superior
Técnico
[7] Eduardo J.R. Morgado, Controlo – Textos de apoio, Instituto Superior Técnico, 2002

i
Anexo A
Figura 6.1 – Controlo da tensão de saída do conversor redutor elevador com limitador anti-embalamento
Figura 6.2 – Conversor redutor elevador
Figura 6.3 – Controlo da corrente na bobina L do conversor redutor elevador
Voref
2.4
Wo
s+Wo
Wo
s+Wo
Transfer Fcn
1
s
SaturationRC
H bridge
gama
io
vo
iL
vL
iC
vc
Gain 3
Kw
Gain 2
Ki
Gain 1
Kp
Gain
ganho _v
Controlador de corrente
ILref
IL
gama
Comando 1
Comando
Carga
Bobine
vc
6
iC
5
vL
4
iL
3
vo2
io
1
Series RLC Branch 1
Series RLC Branch
R1R0Multimeter
5
Ideal Switch
g m
1 2
IGBT 1
gm
CE
IGBT
gm
CE
Diode 1
Diode
DC Voltage Source
Current Measurement
i+ -
gama1
gama
1
gamaGain
1
IL2
ILref
1

ii
Anexo B
Figura 6.1 – Controlo do conversor redutor elevador
Figura 6.2 – Conversor redutor elevador mais rectificador de onde completa monofásico
Wo
s+Wo
Wo
s+Wo
Redutor -elevador
gama
Io
Vo
Ic
Vc
iL
VL
Controlo de Tensão
Vref
Vo
Out1
Controlador de Corrente
ILref
IL
gamaConstant
2.4
Condensador
Comando
Carga
Bobina
VL
6
iL
5
Vc
4
Ic
3
Vo
2
Io
1
comutador de carga
Series RLC Branch 3Series RLC Branch 2
Rectificador
A
B
+
-
R1R0
PulseGenerator
Multimeter
5
Ideal Switch
g m
1 2
IGBT 1
gm
CE
IGBT
gm
CE
Diode 1
Diode
Current Measurement
i+ -
AC Voltage Source
gama
1

iii
Figura 6.3 – Controlo de tensão com limitador de anti-embalamento
Figura 6.4 – Controlo da corrente na bobina L
Out 11
1
s
Saturation
Kp
Ki
Kw
ganho _v
Vo
2
Vref
1
gama1
RelayAdd
IL2
ILref
1

iv
Anexo C
Figura 6.1 – Controlo do Rectificador de factor de potência unitário.
Figura 6.2 – Conversor redutor elevador e rectificador monofásico de ponte completa mais filtro de entrada.
TrigonometricFunction
cos
Wo
s+Wo
Wo
s+Wo
Subsystem
Evo
Gama
beta
Saida do Filtro
Relay 1
Relay
Redutor -elevador
gamaS1
betaS2
IoVoIc
VciL
VLICf
VCfIr
VrIH
IacVac
Product
Ir_ref
Ir_ref Ir
Integrator
1s
Iac /Vac
1/0.6371/T
Controlo de Tensão
Vref
Vo
Out1
Evo
Constant 4
1
Constant 3
2*pi *50*Vm *Cf
Constant 1
2.4
Condensador de entrada
Condensador
Carga
Bobina
Add
Vac
13
Iac12
IH
11
Vr
10
Ir
9
VCf
8
ICf
7
VL6
iL
5
Vc
4
Ic3
Vo
2
Io
1
rp
comutador de carga
v+-
v+-
v+-
Series RLC Branch 3Series RLC Branch 2
Rectificador
A
B
+
- R1R0
PulseGenerator
Product
Pactiva
Multimeter
7
Mean Value
In Mean
NOT
Lf
Ideal Switch
g m
1 2
IGBT 1
gm
CE
IGBT
gm
CE
Divide 1 Display 1
Diode 1
Diode
i+ - i
+ -
i+ -
Cf
V
IPQ
AC Voltage Source
betaS 22
gamaS 1
1

v
Figura 6.3 – Controlo de tensão com limitador de anti-embalamento.
Figura 6.4 – Referência da corrente.
Figura 6.5 – Sinal de comando para o semicondutor Q2
Evo
2
Out 11
1
s
Saturation
Kp
Ki
Kw
ganho _v
Vo
2
Vref
1
Ir
1Sine WaveFunction Product
Abs
|u|
Ir_ref
1
beta
1NOT
AND
Gama2
Evo
1





























