Embed Size (px)
Citation preview

UM ALGORÍTMO DE ORDEM SUPERIOR PARA A INTEGRAÇÃO DIRETA DAS
EQUAÇÕES DA DINÂMICA ESTRUTURAL
Helio José Corrêa Barbosa
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE
PÔS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE JA
NEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO
GRAU DE MESTRE EM CIÊNCIAS (M.Sc.).
Aprovada por:
e
~L----~a nancio Filho
Agus ~n Juan Ferrante
4 Lu~ ::vfa;~;=
RIO DE JANEIRO, RJ - BRASIL
MARÇO DE 1978

i
A meus pais e
meus irmaos

ii
AGRADECIMENTOS
Ao Professor Fernando Venâncio Filho pela suges
tao do tema e orientação dada ao presente trabalho.
A Abimael F.D. Loula e Nelson F.F. Ebecken pela
amizade, estimulo e colaboração dispensados.
Aos Professores da COPPE/UFRJ, na pessoa de seu
Diretor Paulo Alcântara Gomes, pelos ensinamentos ministrados.
Aos funcionãrios da Biblioteca Central do Centro
de Tecnologia e do Núcleo de Computação Eletrônica pela atençao.
A CAPES e COPPE pelo apoio financeiro.
A Helena Santos de Oliveira pelo esmerado traba
lho de datilografia.
A Maria Mareia Correa Barbosa, pela dedicação na
confecção de toda a parte gráfica, meu especial agradecimento.

V
ÍNDICE
I - INTRODUÇÃO ........................................... 1
II - FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO . .. .......... .. .. 2
2.1 - Introdução ..................................... 2
2.2 - Formulação das Equações de Movimento ........... 2
2.2.1 - Emprego das Leis de Newton . .... ........ 3
2. 2. 2 - Princípio dos Trabalhos Virtuais . . . . . . . 3
2.2.3 - Princípio de Hamilton ... .... .. .. .... .. . 4
2. 3 - Discretização Espacial . . . • . . . . . . . . . . . . . . . . . . . . . 6
2.3.1 - Mitodos Residuais . ........ ... ... ... ... . 7
2.3.2 - Mitodos Variacionais - Mitodo de Ritz .. 10
2.3.3 - Funções Localizadas - Mitodo dos Elemen-tos Finitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
III - M~TODOS DE SOLUÇÃO DAS EQUAÇÕES DE MOVIMENTO DO MODELO
DISCRETO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1 - Introdução . . . . . . . .. .. . . . . . . . . . . . . . .. . . . . . . . .. . . 14
3.2 - Características do Modelo Discreto .. ..... ... ... 14
3.2.1 - Introdução do Amortecimento .......... .. 18
3.3 - Superposição Modal 19
3. 4 - Integração Direta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.5 - AlgorÍtmo.s Baseados na Interpolação das Forças de Inircia . . . . . . . . . . . . . . . . . . • . . . . . . . . . . . . . . . . . . . . . 31
IV - PROCEDIMENTOS IMPLEMENTADOS - EXEMPLOS - CONCLUSÕES 56
4 .1 - Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2 - Elementos Implantados .................. ........ 56
4. 2. 1 - Matrizes de Massa . . . . . . . . . . . . . . . . . . . . . . 58
4.2.2 - Matrizes de Rigidez ................. ... 65
4.3 - Elementos Escalares 70
4.4 - Matriz de Amortecimento ........................ 71

vi
4.5 - Vetor de Excitações Externas ..••........••.••••
4.6 - Critirio de Convergincia •...........•....•••..•
4.7 - Fluxograma ...•.•••.•....•............•........•
4. 8 - Exemplos de Aplicação •..•..•.•••.•...•••...••.•
4.9 - Conclusões •...•••.•••..•......••...•..•••••....
BIBLIOGRAFIA •••••.•••..•....•.............•...•.•••..••••••
APÊ:NDICE •••.•••..••••..•.••.••..•...•••..•..••....•..•.....
74
76
78
82
109
111
115

1
I - INTRODUÇÃO
A obtenção da resposta de sistemas estruturais sub
metidos a solicitações de natureza dinâmica é um problema que tem
merecido continua atenção por parte dos pesquisadores. Isto se
deve, por um lado, ã prÕpria necessidade de se resolver problemas
físicos cada vez mais complexos e por outro as dificuldades rela
cionadas com a integração das equações diferenciais de movimento.
A procura de algoritmos que combinem precisao com
rapidez (eficiência computacional) continua para que problemas n~
vos e maiores possam ser abordados e resolvidos a um custo razoa-
vel.
No presente trabalho estuda-se um algoritmo de in
tegraçao passo a passo desenvolvido em Q., 2, TI para a obtenção
da resposta, a solicitações de natureza determinística, de estru-
turas em que se considera não-linearidade geométrica
elásticos lineares.
e mateiiai.s
No Capitulo II a formulação das equaçoes de movi
mento e alguns processos de discretização espacial são comentados
chegando-se às equações de movimento na forma discreta.
No Capitulo III métodos de solução dessas equaçoes
de movimento do modelo discreto são revistos.
Apresenta-se e discute-se o algoritmo implementa-
do, deixando-se para o Capitulo IV a descrição mais detalhada dos
procedimentos implantados bem como alguns exemplos de aplicação
do algoritmo e as conclusões obtidas.

2
II- FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO
2.1 - INTRODUÇÃO
Os sistemas mecânicos, para fins de análise, podem
ser classificados em dois grupos, segundo a natureza das
veis cinemáticas (deslocamentos, velocidades e acelerações)
variaçao ao longo do tempo deseja-se conhecer.
Um sistema é dito d{~e~eto quando seu estado
variá-
cuja
fica
perfeitamente definido a partir do conhecimento dos valores assu
midos por aquelas variáveis cinemáticas em um conjunto finito de
pontos desse sistema.
tempo.
O domínio das variáveis independentes é o
Diz-se eontZnuo quando suas propriedades mecanicas
sao funções contínuas de variáveis espaciais e a caracterização
do seu estado é feita mediante a adoção de variáveis
que variam continuamente com a posiçao e o tempo.
cineffiâticas
As equaçoes diferenciais de movimento sao ordiná-
rias no primeiro caso e parciais no caso de sistemas contínuos.
Normalmente os sistemas contínuos sao estudados por
meio de técnicas numéricas que conduzem a um sistema de
diferenciais ordinárias no tempo: modelo discreto.
Neste capítulo discute-se a formulação das
equaçoes
equa-
çoes de movimento de sistemas contínuos e algumas técnicas de dis
cretização.
2.2 - FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO
As equaçoes de movimento de sistemas mecanicos po
dem ser obtidas através de:

3
2.2.1 - Emprego da• Leis de N~~ton
De acordo com as leis do movimento de Newton, em
um referencial inercial, a variaçao da quantidade de movimento li
near de uma partícula e igual a resultante das forças aplicadas
sobre ela; e a variaçao da quantidade de movimento angular, com
relação à origem dos eixos coordenados e igual a resultante do mo
menta de todas as forças em relação a essa mesma origem.
A aplicação geral desses princípios a meios contí
nuos é feita de maneira a assegurar que o movimento de cada parti
cula desse meio obedeça às leis de Newton e assim sao
equações diferenciais parciais de movimento
obtidas as
Entretanto e no caso de sistemas discretos ou sis
temas contínuos simples que a aplicação direta das leis de Newton
e usualmente feita.
Introduzindo-se o conceito de forças de inércia,
pelo princípio de d 1 Alembert, as equaçoes de movimento passam a
ser obtidas de maneira análoga ao problema estático: a partir de
condições de equilíbrio.
As forças atuantes no sistema podem incluir forças
de restituição de diversos tipos e forças externas dependentes do
tempo e/ou de deslocamentos que, juntamente com as forças de iné~
eia e de ligação, deverão ser consideradas vetorialmente para o
estabelecimento do equilíbrio.
Em sistemas simples esta e, frequentemente, a for
ma mais direta e conveniente de se obter as equações de movimento.
2.2.2 - Princípio dos Trabalhos Virtuais
O princípio dos trabalhos virtuais pode ser expre~
so como se segue. Se um sôlido, em equilíbrio sob a ação de for-

4
ças de volume e de superfície, e submetido a um deslocamento vir-
tual, isto e, um campo de deslocamentos contínuo infinitesimal,
arbitrário, porem compatível com as restrições impostas ao sÕlid~
o trabalho virtual realizado pelas forças externas e igual ao tra
balho virtual das solicitações internas. Ou seja:
( 2. 1)
A equaçao acima e pois uma afirmação de equilíbrio
estático. Sua extensao ao problema dinimico e feita através do
princípio de d'Alembert com a inclusão das forças de inercia na
expressao do trabalho virtual das forças externas.
O princípio tem a vantagem de nao fazer uso das
forças de ligação, jã que não realizam trabalho em deslocamentos
virtuais, o que não pode ser feito quando da aplicação direta das
leis de Newton. Observa-se que se trata de um princípio escalar.
2.2.3 - Princípio de Hamilton
Dado um sistema dinâmico sujeito a forças externas
e restrições geométricas, chama-se de configuração admissível do
sistema qualquer configuração que atenda as restrições impostas.
Ao conjunto de todas as configurações reais assumi
das continuamente pelo sistema entre dois instantes cha
ma-se caminho dinâmico4 Uma variaçao virtual em relação ao cami-
nho dinâmico gera um caminho variado.
Considerando-se apenas os caminhos que coincidem
com o caminho real em o princípio de Hamilton afirma en
tao que o caminho real tomado pelo sistema é tal que satisfaz a :

onde:
5
]' ~,, - ,, ' aw,J dt = o ( 2. 2)
tl
T = energia cinética total do sistema
V energia potencial total do sistema, incluindo energia de
deformação e o potencial de todas as forças externas con
servativas
trabalho virtual das forças não-conservativas
no sistema
atuantes
Para sistemas conservativos trata-se de tornar estacionário o fun
ciona 1:
(T - V) dt ( 2. 3)
que, sob certas condições [ 4 J ' ~ . assume um m1n1mo.
Esta formulação prescinde do conhecimento explíci
to das forças atuantes e usa grandezas escalares, sendo a de em
prego mais generalizado em problemas complexos.
Deve ser lembrado que os três procedimentos de for
mulação apresentados levam às mesmas equaçoes diferenciais de mo
vimento ou equações de equilíbrio dinâmico.
Fazendo-se uso das equaçoes de compatibilidade pa
ra ~istemas continuas e das equações constitutivas para materiais
elásticos obtém-se, num referencial inercial equações de movi

6
menta na forma:
+ M(r) u(r, t) =F(r,t) ( 2. 4)
onde:
D e um operador diferencial constituído de derivadas em re-
lação às coordenadas espaciais r e representando as ca-
M
racteristicas de rigidez do sistema.
e uma matriz função das coordenadas espaciais
rizando a distribuição de massa do sistema.
F e o vetor de ações aplicadas ao sistema
u e o vetor de deslocamentos incógnitos
r caracte
Para sistemas naturalmente discretos as equaçoes de movimento se-
riam:
Q ( t)
onde os pontos indicam derivação em relação ao tempo e:
F e o vetor de forças elásticas de restituição
M e a matriz de massa diagonal do sistema
g e o vetor de açoes externas aplicadas
g e o vetor de deslocamentos generalizados incógnitos
2.3 - DISCRETIZAÇÃO ESPACIAL
( 2 • 5)
Embora para alguns sistemas contínuos simples com
condições de contorno também simples seja possível encontrar so-
luçÕes exatas, tais casos constituem exceçao. Nos problemas reais

7
quando é possível formular as equaçoes diferenciais parciais de
movimento nem sempre e possível resolvê-las; e, quando se canse-
gue resolvê-las, podem nao ser satisfeitas as condições de contor
no.
são usadas entao têcnicas numéricas que conduZem :a
am sistema de equações diferenciais ordinárias no tempo
as equações de um sistema discreto.
análogas
Entre os diversos processos de discretização[}, ~
será feita referência apenas àqueles que empregam funções de apr~
ximaçao.
Estes processos assumem que a resposta do sistema
contínuo pode ser aproximada por uma série finita na forma:
onde <j,. ( r) -1 -
u (r , t) -n -
= n E
i=l <j,. ( r) -1 -
q . ( t) 1
sao as funções de aproximaçao dependentes
( 2. 6)
somente
da variável espacial r e q. ( t) 1
são coordenadas generalizadas
incógnitas funções do tempo.
O objetivo é escolher funções que sejam conve-
nientes do ponto de vista computacional e proporcionem uma boa
aproximaçao para a solução u
De acordo com o critério de aproximação adotado,
tais processos podem ser chamados de residuais ou variacionais.
2.3.1 - Métodos Residuais
A característica principal dos métodos residuais é
fazer uso direto da equação diferencial de movimento (2.4) intro
<luzindo nela a solução aproximada (2.6) que, em princípio, deverá
satisfazer a todas as condições de contorno.

8
Como a solução
origem a um resíduo:
-nao e a exata essa substituição dá
s(r, t) ~~J + M(r) t) ( 2. 7)
A idéia básica comum aos métodos residuais ê deter
minar a aproximação u -n
de maneira a minimizar, de alguma forma,
o erro 1:;<E, t) cometido.
Assim o diferente tratamento dado ao resíduo
s(r, t) dá origem a diversos processos tais como Galerkin e colo
cação, vistos a seguir.
a) - Método de Galerkin -
Nesse método o resíduo s (r, t) ê ponderado pelas
n funções de aproximação e integrado sobre o domínio íl:
T . <jJ. (r) s(r, t) díl -1 -
i = 1, 2 ... n ( 2. 8)
Igualando-se essas n integrais a zero obtêm-se
n equações diferenciais ordinárias nas coordenadas
forma:
n i::
j=l nlq,~ - L'.' iJ
díl q.(t) + J
<j,~ F(r, t) díl -1
ou ainda:
n i::
j=l
i
~~ M ~. díl ij.(t) = -1 - J J
1, 2 ... n
q. ( t) J
na
(2 • 9)

9
g ( t) (2.10)
Os coeficientes das matrizes seriam:
m .. = l <P :' M <P • díl iJ -1 ., J
(2.lla)
k .. = 1 <P:' D~~ díl 1J -1 - -.L_
íl
(2.llb)
Q. = l <P :' ~e::: ' t) díl 1 -1
( 2. llc)
Observe-se que as matrizes obtidas serao
cas no caso de operadores auto-adjuntos [s]
simétri-
As funções <j). foram escolhidas de maneira a aten-1
der as condições de contorno associadas ao problema, e, conseque~
temente, os resíduos foram construídos somente sobre o domínio íl.
Essas condições podem ser relaxadas [7] adotando-se funções <P • -1
que somente satisfaçam às condições de contorno geométricas, des
de que se considerem resíduos ponderados tambêm no contorno e que
sejam adicionados ã expressão (2.8).
b) - Método_da_Coloca5ão -
O método da colocação admite inicialmente uma elas
sificação de acordo com a natureza das funções de aproximação <P • -1
i) Método do Contorno - quando as funções <P • -1
satisfazem somen
te ã equação diferencial
ii) Método do Interior - quando as funções <P • -1
satisfazem as con
iii) Método Misto
diçÕes de contorno mas não satisfazem à
equaçao diferencial
quando as funções <f:>. nao satisfazem nem a -1
equaçao diferencial nem às condições de con -
torno.

10
O método consiste em se tomar pontos no contorno e/
ou no domínio, de acordo com o caso i), ii) ou iii), e igualar a
zero, em cada ponto, uma ou mais componentes do erro E ( r. , t) g~ - ;_, 1
rando um total de n equações diferenciais o~di~ãrias nas coorde
nadas q. (t) que, considerando o e.aso ii), se escrevem: J
~ D.G<j,.(r.)~ . 1-1 -J -1 J=
q.(t) + J
n l: M.(r.)
. -1 -1 J=l
<j, . ( r. ) -J -1
êj.(t) J
F.(r.,t) 1 -1
i=l,2 n
(2.12)
D. e M. so contem a linha correspondente ã componente de E considerada e -1 -1.
o elemento de F(r. , t) - -1
correspondente e denotado por
matricial:
onde os coeficientes sao:
m •. = Mi ( r. ) <j, . ( r. ) 1) - -1 -J -1
k .. =Di ÍcP.(r.0 1J _ cJ -1'.J
Q. =F. (r. ,t) 1 1. -1.
F.(r.,t). 1 -1
Em forma
( 2. 13)
( 2. 14a)
(2.14b)
( 2.14c)
De imediato nota-se que os coeficientes acima sao
obtidos diretamente, sem integração como no método de Galerkin
Por outro lado nao se pode garantir a simetria das matrizes de
massa e rigidez o que, alem de complicar o problema de auto-valor,
prejudica a eficiência dos métodos numéricos de resolução das equa
çoes diferenciais ordinárias resultantesª
2.3.2 - Métodos Variacionais - Método de Ritz
A característica principal dos métodos variacionais

11
e nao operar diretamente sobre as equaçoes diferenciais de movi
mento (2.4), como fazem os mêtodos residuais, e sim sobre uma for
ma variacional equivalente (2.2).
O mais conhecido desses mêtodos e o mêtodo de Rit&
No mêtodo de Ritz a aproximação
u -n
n E
i=l
u -n
<P. ( r) -1 -
Dessa maneira a solução aproximada
adotada ê da forma:
q. ( t) 1
u -n
estarã, em cada
(2.15)
instante
t restrita ao sub-espaço s n
de dimensão n gerado pelas fun-
çoes <j).(i=l,2 ... n) -1
escolhidas e nao no espaço de dimensão
infinita em que o problema foi originalmente proposto. A aproxi-
maçao u -n
é levada ao princípio variacional, no caso o princípio
de Hamilton (2.2), e sao obtidas equaçoes diferenciais ordinárias
nas coordenadas generalizadas q. ( t) 1
As funções <P. -1
sao linearmente independentes e d~
vem atender à condição de admissibilidade e formarem um conjunto
completo para se garantir a convergência do processo a medida que
n cresce e
A condição de admissibilidade implica em que as
<P. -1
devam ter derivadas contínuas até ordem m - 1 on-. funções
de m e a maior ordem de derivação que surge no funcional (2.2),
e satisfaçam às condições de contorno geomêtricas.
O conjunto de funções <j).(i=l,2 -1
n)
completo [a] num espaço s quando para qualquer elemento
tencente a s existe uma combinação u -n
n E
i=l a. <P .
1 -1 que
e dito
u P eE_
conver-
ge para u , na norma de S , quando n tende para infinito.

12
Kitodo dos Elementos Finitos
Ati aqui todos os mitodos faziam uso da aproxima-
çao (2.6) onde as funções cj). ( r) -1 -
alim de atender pelo menos as
condições de contorno geométricas, deveriam se extender por
o domínio.
todo
A construçao das funções cj). -1
torna-se frequente-
mente impraticável em problemas práticos onde elas devem tambim
representar adequadamente contornos irregulares e propriedades ma
teriais complexas.
A idiia de se adotar funções de aproximaçao que se
anulam em todo o domínio exceto em sub-regiões leva ao mitodo dos
elementos finitos [7]
No mitodo dos elementos finitos o domínio i dividi
do em sub-domínios, ou elementos, de formato conveniente, defini
dos por um conjunto de pontos desse sub-domínio, chamados nos.
Sobre cada elemento sao assumidas as funções de
aproximaçao, ·em geral na forma de polin~mios simples, que se anu-
1am fora do elemento considerado.
Alim disso os deslocamentos (e eventualmente suas
derivadas em relação a variâveis espaciais) são tomadas como coar
denadas generalizadas que passam assim a ter significado físico
claro.
Dessa maneira as funções de aproximação se tornam
funções de interpolação tendo valor unitário no nó correspondente
e nulo em todos os demais.
A maior vantagem [9] da discretização pelo mitodo
dos elementos finitos reside no fato de se poder aproximar domí-
nios arbitrários com propriedades físicas complexas usando um con

13
junto de elementos de formas e propriedades simples.
A introdução das condições de contorno geometricas,
feita apos a montagem do sistema de equaçoes, e facilitada e e
possível alto grau de automatização do metodo. Para se obter uma
melhor aproximaçao pode-se proceder agora de duas formas:
a) Aumenta-se o numero de elementos em que o domínio e dividido
mantendo-se as funções de interpolação em cada elemento.
b) Mantem-se o numero de elementos em que o domínio e dividido e
refinam-se as funções de interpolação em cada elemento.
Observe-se que fora do metodo dos elementos
tos a Única alternativa·e aumentar o numero de funções
nidas em todo o domínio, na serie (2.6).
fini-
defi

14
III - MÉTODOS DE SOLUÇÃO DAS EQUAÇÕES DE MOVIMENTO DO MODELO DIS
CRETO
3.1 - INTRODUÇÃO
A solução das equaçoes de movimento do modelo dis-
ereto, formuladas no capitulo anterior, poderia ser obtida por
qualquer processo numérico clássico para a resolução de problemas
de valor inicial.
A prática mostrou entretanto que na maioria dos
problemas de dinâmica estrutural tais processos sao ineficientes.
Os processos mais usados em dinâmica estrutural sao
a) superposiçao modal
b) integração direta
As características dos dois processos serao comen-
tadas neste capitulo. Antes porem serao definidas as principais
propriedades do modelo discreto.
3.2 - CARACTERÍSTICAS DO MODELO DISCRETO
A aplicação dos metodos de discretização espacial
vistos até aqui, conduz sempre a um sistema de equações diferenciais
ordinárias que pode ser colocado na forma:
M u + R(u) F ( t) (3.la)
para sistemas nao lineares, e na forma:
M Ü + K u = F(t) (3.lb)
para sistemas lineares.

15
As matrizes M e ~, de massa e rigidez respecti
vamente, e o vetor F de ações externas, são obtidos de acordo
com o processo adotado. Note-se que o emprego do método de Ritz
ou Galerkin, em conjunto com o método dos elementos finitos, faz
com que essas matrizes sejam simétricas e em banda o que é muito
vantajoso do ponto de vista computacional.
As características principais do modelo
surgem ao se procurar soluções da forma:
u(t) X f(t)
para o problema de vibrações livres:
M u + K u o
Substituindo (3.2) em (3.3) obtém-se:
M x f(t) + K x f(t) = 0
-ou seja, n equaçoes:
n .. n
discreto
e 3. 2 l
e 3. 3 l
e 3. 4 l
l: m .. X. f(t) + l: k .. X. f(t) o i=l,2 ... n j=l lJ J j=l lJ J
e 3. s l
nas _quais podem ser separadas as variiveis:
n l: k .. x . ..
f(t) j=l lJ J - f(t)
i 1 , 2 ... n (3. 6) n l: m .. x.
j=l lJ J

16
Como a expressao ã esquerda da igualdade (3;6) in-
depende do Índice i e a expressao ã direita independe do tempo,
ambas devem ser constantes e assim pode-se escrever:
n I
j=l
f(t) + w2 f(t)
(k .. - w2 m •• ) iJ iJ
o ( 3. 7)
i = 1, 2 .... n ( 3. 8)
Ao se escolher uma constante positiva w2 obtém-se
soluções harmônicas na equação (3.7) da forma:
f ( t) A cos (wt - <j)) ( 3. 9)
onde A e sao constantes arbitrárias e os valores que w p~
de assumir sao dados pelas equaçoes (3.8) que constituem um pro
blema de auto-valor que se escreve matricialmente:
(K - w2 M) x o (3.10)
Para matrizes M e K simétricas e positivas definidas sao en-
contrados n valores para w2 e as respectivas raízes quadradas
positivas sao as chamadas frequências naturais do sistema (3.lb).
A cada frequência natural w está associado um au
to-vetor ~ , obtido a menos de uma constante multiplicativa, cha
mado modo normal de vibração, que satisfaz a equação (3.10).
Chama-se de matriz modal X do sistema a matriz
cujas colunas sao os auto-vetores do sistema ordenados ,segundo as
respectivas frequências, de maneira crescente.
Os modos normais podem ser normalizados em relação

17
a matriz de massa pela relação:
T X M X 1 (3.11)
que determina de maneira Única o mÜdulo das componentes de x
A propriedade mais importante dos modos normais e
a sua ortogonalidade em relação às matrizes de massa e rigidez:
I (3.12a)
(3.12b)
onde I e a matriz identidade de ordem n e w e a matriz dia-
gonal contendo as frequências naturais do sistema.
Observe-se qti~ enquanto o sistem~ contínuo aprese~
ta um espectro de frequências discreto que parte da fundamental
(a mais baixa) e cresce indefinidamente, o modelo discreto (3.lb)
que o aproxima tem um espectro limitado.
·A frequência mais alta desse espectro e chamada
frequência de corte (cut-off frequency) e representa o limite su
perior de excitação do modelo discreto; excitações em frequências
mais altas produzem ruído ou resposta espacial aleatória [1Q]
Outra característica comum aos modelos discretos
[li] e a tendência de deterioração da resposta à medida que as
frequências de excitação se aproximam da frequência de corte.
Isto se deve aos erros no espectro de frequências
e nos modos normais do sistema discreto, que são maiores nas fre
quências e modos mais altos.

18
Quanto a solução do problema da resposta
e de interesse identificar quatro tipos de solução [l(U
dinâmica
1) A solução exata das equaçoes de movimento do sistema contínuo
2) A solução exata das equaçoes de movimento do modelo discreto
(3.1) conservando número ilimitado de dígitos
aritméticas.
nas operaçoes
3) A solução exata das equaçoes (3.1) porem com numero limitado de
digitas nas operações aritméticas.
4) A solução aproximada das equações (3.1) também com numero limi
tado de dígitos nas operações aritméticas.
Define-se entao erro de truncamento como aquele ca~
sado pela substituição de um sistema contínuo por um modelo
ereto e é a diferença entre as soluções 1 e 2
dis-
Erro de arredondamento (round-off errar) depende do
grau de precisão dos cálculos aritméticos e é a diferença entre
as soluções 2 e 3. A diferença das soluções 3 e 4 dependerá do
algorítmo de integração empregado; é o erro de integração.
Será vista a seguir a caracterização do amorteci -
menta.
3.2.1 - Introdução do Amortecimento
Todo sistema dinâmico real apresenta alguma forma
de dissipação de energia. A definição desses mecanismos de dissi
paçao de energia é muito difícil e normalmente são empregados mo-
delas matemáticos convenientes para sua representaçao .de forma
aproximada. são citados a seguir três desses modelos.
Chama-se de amortecimento de Coulomb ou atrito se
co aquele que dá origem a uma força de módulo constante e que se
opõe sempre ao movimento.

19
Amortecimento estrutural [s1 e outro modelo também
usado e estã relacionado com a energia dissipada
material da estrutura.
internamente no
Entretanto, o modelo mais usado, devido a sua rela
tiva comodidade, é o amortecimento viscoso linear que dâ origem a
uma força proporcional a velocidade e de sentido oposto a ela.
Neste caso, introduzindo-se o amortecimento direta
mente no modelo discreto, obtém-se:
M u +Cu+ K u = F(t) (3.13)
No Capítulo IV formas usuais de construçao da ma-
triz de amortecimento e serao abordadas.
3.3 - SUPERPOSIÇÃO MODAL
O processo de superposiçao modal [s, 6] e adequado
ao caso em que as matrizes M , C e K sao constantes no tempo - -e busca o desacoplamento do sistema de equaçoes (3.13) através de
uma transformação linear conveniente.
Sua eficiência estã ligada à forma da .matriz e
que dá origem a dois procedimentos distintos conforme o amorteci
mento seja do tipo proporcional ou não-proporcional.
a) Amortecimento_ProEorcional
Ocorre quando os modos normais sao ortogonais a ma
triz de amortecimento e a transformação linear procurada é:
li ( t) X 11(t) (3.14)

20
onde nCtl sao as novas coordenadas generalizadas e X e a ma-
triz modal do sistema.
Introduzindo-se a transformação (3.14) nas equa-
çoes de movimento (3.13) e levando em conta as relaç~es de ortog~
nalidade (3.12) e a nova relação:
onde
com:
C*
C*
e diagonal com seus elementos dados por:
e~. 11
2 i;. w. 1 1
w. = frequência natural do modo i 1
i; . 1
fração do amortecimento crítico do modo i
as equaçoes se desacoplam na forma:
n. + 21;. w. n. + w~ n. = N. 1 1 1 1 1 1 1
i 1, 2, ... n
(3.15)
(3.16)
(3.17)
onde os N. 1
sao elementos do vetor de forças generalizadas:
N ( t) (3.18)
A solução das equaçoes (3.17) pode ser obtida pela
transformada de Laplace. No caso mais comum de ~. < 1 1
temos:

21
t
11.(t) 1
J Ni (T) exp [- çiwi (t - T~ sen wid (t - T) dT +
o
com:
ç . 1
1 (1 - ç;:)2
1
+ t_!_ exp(- ç.w. t) sen w.d J n1.(0) ~id 1 1 1 ~
11 (O)
l w.(1-ç:)2
1 1
XTMu(O)
n(O) = XT M ~(O)
(3 .19)
(3.20)
onde a integral de convolução deverá, em geral, ser calculada nu-
mericamente.
Uma alternativa é aplicar sobre as equações (3.17)
um algoritmo de integração direta como os que
adiante.
-serao vistos
A solução final é dada pela superposição das
postas correspondentes a cada modo através de (3.14).
-mais
res-
Dessa maneira, o processo de superposição modal en
volve a resolução de um problema de autovalor para a determinação
de uma nova base para o espaço dos vetores deslocamentos onde as
equaçoes se apresentem desacopladas para, em seguida, ser feita a
integração no tempo.

22
A grande vantagem dessa mudança de base e que,para
virios tipos de problema,ê possivel se obter uma boa
çao para a resposta considerando-se apenas uma pequena
aproxima
fração do
número total de equações desacopladas, normalmente aquelas corre~
pondentes aos primeiros modos. Isto permite também que apenas os
primeiros autovalores e autovetores sejam calculados.
A resposta ê truncada, só se considerando as con-
tribuiçÕes dos p primeiros modos onde p ê determinado pelas carac
terísticas da·estrutura, pela distribuição espacial do carregame~
to e pelo seu conteúdo de frequências.
b) Amortecimento_Não-ProEorcional
Neste caso a matriz C* da equaçao (3.15) nao e
diagonal e as equações de movimento na base formada pelos modos
normais sao ainda acopladas pela matriz de amortecimento C*
Entretanto, sempre que a resposta estiver essenci-
almente contida nos p primeiros modos, o processo mais eficien-
te [12) parece ser integrar diretamente o sistema truncado forma-
do pelas p primeiras equações na base dos modos normais:
N < t) (3.21)
onde a matriz C* e obtida a partir de C* desprezando-se o ac~
plamento entre os p primeiros modos considerados na resposta e
os restantes (n - p) modos superiores.
Em (3.21) as matrizes sao de ordem (p X p) e os
vetores de ordem p Uma maneira de desacoplar o sistema consis
te em inicialmente transformar o sistema de n equações diferen-
ciais de 2~ ordem num sistema de 2n equaçoes diferenciais de 1~

23
ordem como mostrado em [s]
A partir dai a solução e obtida de maneira seme-
lhante ao caso não-amortecido, envolvendo um problema de auto-va-
lorde ordem 2n e a determinação da matriz modal associada
desacopla o sistema. Resultam 2n equaçoes diferenciais de
que
1 !!
ordem desacopladas cuja solução pode ser obtida por meio da trans
formada de Laplace. Entretando o fato de se dobrar a ·.·ordem do
problema de autovalor e o uso de aritmética complexa acarretam um
aumento de esforço computacional que,normalmente,não
vantagem de se ter equaçoes desacopladas.
compensa a
Nesse caso e preferível a integração direta de to-
das as equaçoes (3.13) ou a integração das
nas coordenadas modais, equaçao (3.21).
p primeiras equaçoes
Qualquer que seja o tipo de amortecimento, o pro-
cesso de superposição modal exige que as matrizes ~ , ~ e K se
jam constantes no tempo o que limita o seu uso a problemas linea-
res, embora em [13] sua extensao ao caso não-linear
proposta.
tenha sido
Note-se que o Único erro inerente ao processo é de
truncamento, quando as contribuiçiies dos modos mais al·tos sao des
prezadas. Pelo visto a maior eficácia da superposição modal se
dâ em problemas lineares cuja resposta pode ser bem representada
pela superposição das respostas correspondentes a uma pequena fra
ção do número total de modos da estrutura, geralmente os mais bai
xos.

24
3.4 - INTEGRAÇÃO DIRETA
Os métodos de integração direta recebem esta deno-
minaçao por não efetuarem nenhuma transformação prévia nas
-çÕes de movimento.
O sistema de equaçoes em sua forma original,
equa-
aco-
plada, e integrado numericamente por um procedimento passo a pas
so a partir do conhecimento das condições iniciais do problema.
A instituição dos algorÍtmos de integração direta
pode ser feita a partir de pelo menos tris ideias bisicas vistas
a seguir.
A primeira idéia consiste em se discretizar o ope
rador diferencial com o uso de fórmulas de diferenças finitas co
mo no caso do método da diferença central [14]
Uma outra maneira consiste em assumir formas deva
riaçao para as acelerações, velocidades e deslocamentos ao longo
do tempo em cada intervalo de integração e satisfazer as equaçoes
de movimento nos pontos extremos desses intervalos de tempo. É o
caso do método da aceleração linear e o método - 8 de Wilson [15].
Um procedimento alternativo seria assumir formas de variaçao para
acelerações, velocidades e deslocamentos ao longo do intervalo de
integração e aplicar um critério de aproximação como o de Galer-
kin [6, 16]
Embora a instituição dos métodos possa ser distin
ta chega-se sempre a uma relação de recorrência que permite o ava~
ço da solução no tempo e pode geralmente ser escrita na forma:
D u(t -o - n t n-1
••• ) + p (3.22)

com:
~ ( t 1) - n+
onde D -o
e ~l
u ( t 1) - n+
e
25
~(t ,t 1, ... ) = - n n-
u ( t ) - n
sao matrizes que definem a transformação dos ve-
tores de aceleração, velocidade e deslocamento nos tempos
t n
t n-1
mento do tempo
çao externa.
nos vetores de aceleração, velocidade e desloca-
t n+l p
As matrizes
e um vetor que leva em conta a excita-
D -o
e ~l sao funções das proprieda-
des do sistema (matrizes de massa, amortecimento e rigidez) e do
intervalo de integração ti t
Supondo-se que seja inversível, a equação(3.22)
se escreve:
ou ainda:
onde A = D-l D -1 -o
D-l D u(t -1 -o - n
= A ;;(t n t l' n-
t n-1 -1
••• ) + ~l p
-1 ••• ) + ~l p
e o operador de integração.
(3.23a)
(3.23b)
Quando as matrizes de massa, amortecimento erigi
dez nao sao funções dos deslocamentos ou de suas derivadas a trans
formação é dita linear.
Se o vetor u do 29 membro da relação (3.22) con-

26
têm informações apenas do instante anterior t o método e n
dito
de um passo (one-step); se contêm informações de tempos anterio-
res ê chamado de múltiplos passos (multi-step).
Sempre que a matriz ~l puder ser colocada em for
ma triangular o algoritmo e dito explícito; caso contrário implÍ-
cito.
Outra classificação importante surge a partir do
estudo da estabilidade do operador de integração [16, 17, 18, 19]
e a esse respeito serio ·feitas a seguir algumas observaç~es base~
das na referência [16] onde o problema ê abordado de maneira mais
rigorosa e completa.
Um algorítmo de integração é dito estável se todos
os operadores do conjunto An (n = 1, 2, ... ) forem uniformemen-
te limitados, ou seja, existem constantes positivas K n
li An V li < K li V li n
onde li v li e a norma de v
Definindo raio espectral de A [18] como:
p = max 1 ". 1 1
onde À. 1
sao os autovalores de A , a condição anterior
exige que p seja limitado pela unidade.
Pode-se entao resumir o ~omportamento
aproximada de um oscilador simples como se segue:
da
- se
- se
p > 1
p < 1
a solução e amplificada ao longo do tempo;
a solução e amortecida ao longo do tempo
tal que:
(3.24)
(3.25)
(3.24)
solução

27
- se p = 1 nao hã introdução de erro nas amplitudes da solução
numérica obtida.
Um operador é dito incondicionalmente estável se a
solução para quaisquer condições iniciais nao cresce indefinida
mente, qualquer que seja o valor do intervalo de integração usado
Quando isto so ocorre para valores de IH menores que um
determinado valor crítico, o operador é dito condicionalmente es-
tãvel e se não ocorre para qualquer At > O
condicionalmente instável.
o processo e dito in
Os operadores de integração introduzem, normalmen
te, dois tipos de erro na solução do problema oscilatório: um er
ro nas amplitudes e um erro no período.
Quando p < 1 hã introdução de um amortecimento
artificial na solução numérica e a amplitude do deslocamento de-
cai com o tempo. Com relação ao período hã, em geral, um aumen-
to do mesmo na solução numérica.
Para a representaçao da solução oscílatÕria os auto
valores de A
onde:
devem ser complexos conjugados da forma:
a ± bi
<j, are tg(b/a)
±i<j, p e (3.26)
(3.27à)
(3.27b)
Podem entao ser tomados como medidas dos erros introduzidos na so
lução numérica os parâmetros [20]

28
amortecimento artificial do algoritmo
T - T T
w 6t _ l -- l . ~ t erro reativo no periodo
onde T e T sio os períodos do oscilador e da soluçio numérica
aproximada, respectivamente.
São comentados a seguir dois operadores muito usa
dos na prática e de características distintas.
a) Método_da_Diferensa_Central_ll41
Adota para acelerações e velocidades as fÕrmulas de
diferenças finitas:
Ü(t) 1
t(t - 6 t) 2 u(t) + u(t 6 t ;l = - + 6 t 2 J
(3.28a)
;, ( t) 1 t u(t 6 t) u(t + 6t~ = rn - + (3.28b)
que levadas a equaçao de movimento no tempo t
M Ü(t) + e {,(t) + K u(t) = F(t) (3.29)
fornecem a relaçio de recorrência do método:
e: 2 M - 2 lút ~ u ( t - 6 t) (3.30)
onde se usa para a inicialização do processo:

29
u ( - lu) = u (o) - ln ~ (o) + li~ 2
ü (o) (3.31)
-Da expressao (3.30) conclui-se que o uso de uma
matriz de massa diagonal e, no caso de problemas com amorteCimen
to, uma matriz de amortecimento também diagonal, tornam o método
explÍcito,não havendo ·necessidade de se resolver um sistema de
equações simultâneas e nem de se montar as matrizes globais da es
trutura, podendo-se trabalhar a nível de elemento [14}.
A desvantagem do método reside no fato de ser ape-
nas condicionalmente estâvel, exigindo intervalos
tit<tit .· - cr1.t.
No caso linear:
tit<i'it. cr1t.
= T .
m1n 'IT
onde T . e o período mínimo do modelo discreto. m1n
de integração
(2.32)
Tem sido aplicado para a obtenção de resposta tra~
siente em problemas lineàres [21, 22] e não lineares [23, 24].
b) Metodo_de_Newmark_l2s1
O método pode ser visto como uma extensao do méto
do da aceleração linear e adota as expressões:
~<t + titl = i'.ict) + [o -yl · ~<tl + y ~ct + tit~ tit (3.33a)
u(t + i'it) = 2(t) + i'it ~(t) + [<-}- 13) Ü(t) + 13 Ü(t + tit~ tit 2
(3.33b)
onde y e 13 são parâmetros que definem a estabilidade e precisão

30
do algoritmo.
Com a equaçao. de movimento, tomada no tempo t + 1:it,
e as expressoes (3.33) chega-se ã relação de recorrência do méto-
do:
~+
+
+
onde:
a o
- y
- y
a o
M
e
1
1 2
1 2
M + -
~o
~l
e
e
ª1 ~ u(t
~ ( t)
u(t)
+ ª2
+ ª4
_Y_
s /:it
+ ti t)
;, e t) + ª3
;, ( t) + ªs
1
s 1:it
f(t + l:it) +
~(t~ +
~(t~ {3.34)
1 ª3 = - - 1
2S
Dois casos de interesse sao:
s
s
1 6
1 4
corresponde ao método da ac·eleração linear
e o método da aceleração média constante.
O primeiro e condicionalmente estável e o
incondicionalmente estável.
segundo
Na equaçao (3.34) observa-se que o método é implÍ-
cito e que em problemas onde K não é constante é necessário efe
tuar uma nova triangulação a cada intervalo de tempo.
Uma aplicação a problemas não-lineares e apresent~
da em [26].Além dos métodos de Newmark e de diferença central,são
também comuns aplicações do método - e de Wilson [27] e do méto-

31
do de Houboult [28]
De uma maneira geral pode-se dizer que os métodos
de integração direta não fazem restrições as matrizes de massa,
amortecimento e rigidez do sistema, sendo assim indicados para os
problemas não lineares.
Nos problemas lineares a integração direta e usada
naquelas situações em que a superposição modal perde suas vanta -
gens como no caso de amortecimento não-proporcional e resposta ri
caem frequências.
3.5 - ALGORÍTMOS BASEADOS NA INTERPOLAÇÃO DAS FORÇAS DE INÉRCIA
A equaçao de movimento do modelo discreto pode ser
escrita na forma:
R = M u !'. ( t) - C u - ~E (3. 35)
onde:
R e o vetor das forças de inércia
~E e o vetor das forças elásticas de restituição
O problema serã discretizado agora ao longo do te~
po adotando-se intervalos de tempo ,=t.1-t. i+ i
lo pode ser considerado um elemento finito de tempo
qual se interpolará o vetor de forças de inércia R
Esse interva
ao longo do
A sequencia de elementos de tempo forma o interva
·lo de tempo total a ser estudado.
O vetor das forças de inércia R sera interpolado

32
por polinômios de Hermite a partir dos valores assumidos por R e
suas derivadas em relação ao tempo nos pontos extremos d? interva
lo T
Assim sao obtidas interpolações lineares, cúbicas,
etc., das quais as duas primeiras serão comentadas a seguir.
a) Intereolação_Linear
Neste caso R se determina a partir de seus valo-
res nos extremos do intervalo (elemento) de tempo
de interpolação:
com:
ou:
onde os Índices
1 - E; e
t T
A interpolação se escreve:
R
R
o e 1 correspondem ao início
pelas
(E; = O)
nal (E;= 1), respectivamente, do intervalo de tempo T
b) Intereolação_CÚbica
funções
(3.36)
(3.37a)
(3.37b)
e fi-
Agora as funções de interpolação sao os polinômios
de Hermite de 39 grau:

33
1 - 3 1; 2 + 2 1; 3 1;-21;2+1;' </>3 = 3 1;2 - 2 t;'
e a interpolação se escreve:
R (3.38a)
ou:
R (3.38b)
Já que 1
di; = d t . T
-Integrando a equaçao de movimento:
Mu=R(t) (3.39)
de t a um t genérico dentro do intervalo T obtém-se: o
i;
M u = M u + J R T di; - -o (3.40)
o
Integrando-se (3.40) chega-se a:
i; i;
M u ~ ~o + i; T ~ ~o + J f R T 2
di;di; (3. 41)
o o
-As equaçoes (3.39), (3.40) e (3.41) em conjunto
com as interpolações (3.37) ou (3.38) resultam em dois algoritmos
de integração:

34
a) Intereolasão_Linear
Introduzindo-se (3.37b) em (3.40) e (3.41), efetu
ando-se as integrações e fazendo-se ç = 1 obtém-se:
ou ainda:
M ~1 = M u - -o
M '.:1 M u + T M u - -O - -O
T '.:1 = u + 2 -o
'.:1 = u + T u + -o -o
T2 + -3 R -o
(Ü ~l) + -o
T2 .. T2 T u + 6 -o ~l
- -
(3.42a)
(3.42b)
(3.43a)
(3.43b)
Observe-se que as expressoes acima sao as mesmas
que se obtém fazendo
método de Newmark.
1 y = 2 e
1 8 = 6 nas expressoes (3.33) do
Assim a interpolação linear das forças de inér
eia conduz ao método das acelerações lineares, como era de se es-
perar.
Neste trabalho apenas o caso da interpolação cúbi
ca sera estudado.
b) Intereola~ão_CÚbica
Seguindo-se o mesmo procedimento do caso anterior
obtém-se as -expressoes:
. M u - -o
T + TI <6 ~º + T R
-O (3.44a)
• Mu +TMu - -o - -o
.T 2 • • + 6Õ ( 21 ~o + 3 ·T !l:o + 9 !l:i - 2 T !l:i)
(3.44b)

ou ainda:
~l = u -o
'( -1 + TI ~
~l '( 2 -1
= u + T u + M -o -o 60 -
35
(6 R -o
+ '( . R -o
. (21 R + 3 T R -o -o
(3, 45a)
(3.45b)
Este algoritmo assume para as acelerações uma va
riação cúbica, superior portanto, a dos métodos usuais.
Observe-se que as equaçoes (3.44) ou (3.45) nao p~
dem ser resolvidas diretamente por nao se conhecer o vetor das for
ças de inércia ;1
tempo.
. e sua derivada ; 1
ao final do intervalo de
Os processos de solução das equaçoes (3.44) depen-
derão da forma em que os vetores ;l puderem ser coloca -
dos.
É interessante portanto nesse ponto se separar os
problemas lineares e os não lineares.
i) Problemas Lineares
Nesse caso e possível se escrever:
;l = !1 - e ~l - K ~l (3.46a)
. ~l = !1 - e ~l - K ~l (3.46b)
onde ~l e o vetor das excitações externas ao final do intervalo
de tempo considerado.
A introdução das expressoes (3.46) nas equaçoes

36
(3.45), levando em conta que:
~l -1
= M ~l (3.47)
resulta num sistema de equaçoes que pode ser escrito na forma:
onde os vetores:
r = -o
u -o
u -o
D r + P -o ..... o
e :1
. ~ . l.Ill.Cl.O representam o estado do sistema no
~l
~l
e no final,
mente, do intervalo de tempo e as demais matrizes são
por:
(3.48)
(3.49)
respectiva-
definidas
, 9 2 2 3 ( C M-1 60 T C - 60 T K - º)
~l =
D = -o
.I K T2 -1 2-+12~·'.'.! K
T T2 1 - - K +~CM- K
2 - 12 - -
(3. 50a)
T T2 C M-1 M - 2 ~ - 12 (K - C)
(3.50b)

P=
~ I 2 -
T 2 1 - CM-12 - -
37
. 2 1 ~ I + !..._ C M-2 - 12 - -
F -o
+
(3.50c)
e I e a matriz identidade de ordem n.
-çao sucessiva
A solução ê obtida ao longo do tempo pela aplica-
-da equaçao (3.48) que,
r -o
colocada na forma:
-1 + !'.1 p (3. 51)
só envolve multiplicações matriciais apos a inversão de !'.i . Ob-
serve-se que as matrizes em (3.48) -sao de ordem 2n, onde n e o
número de grãus de liberdade do modelo discreto,e que alêm disso
nao sao simétricas.
Além dessas duas desvantagens existe ainda o pro
blema da estabilidade do algoritmo.
A aplicação das equações (3.45) a um sistema com
um grau de liberdade
rador de integração é:
(n 1), sem amortecimento, mostra que o op~~
1 -13 2 2 1 wt+Tti. 30 W T + 8Õ
1 + J:._ W2T2 1 4 4
15 + 240 W T
A =
2 1 2 2 - W T(l - ·lO W T)
l + J:._ W2T2 1 4 4 15 + 240 W T
T(l _ J:._ W2T2 + 1 4 4 . 10 720 W T
1 1322 1 - 30 W T + - W4T4 80
(3.52)

38
onde w e a frequência natural do oscilador.
Os autovalores À da matriz A da equaçao (3.52)
sao complexos e de mÕdulo unitário podendo ser colocados na forma:
com:
1 WT (1 - W2T2
cj) 10 tg
(1 -
desde que se adote:
À e ±icj)
1 W4 T 4 )! + 720
13 W2T2 1 3Õ + 80
T<0.503T o
onde T o
e o período do oscilador.
(3.53)
1 .1
(1 - W2T2)2 10
(3. 54)
W 4 T 4 )
(3.55)
A condição (3.55) caracteriza o algoritmo definido
pela interpolação cúbica das forças de inércia como apenas condi
cionalmente estável.
Para sistemas com vários graus de liberdade, T o
deve ser substituído na expressao (3.55) por T . , período mini min
mo do sistema, o que acarreta, normalmente, intervalos de integr~
çao desnecessariamente pequenos.
É possível, entretanto, modificando ligeiramente
os coeficientes das expresssÕes (3.45), tornar o algoritmo incon
dicionalmente estável como mostrado em [2, 3].
As novas expressoes, correspondentes as expressoes
(3.45) sao:

~l u -o
~l
+ T U -o
u -o
39
+ T M-l (6 R + T R0
6 R R0
)
12 - -o -o+ -1 - T -1
(20 R -o
. + 2.5 T R
-o
(3.56a)
(3.56b)
Note-se que apenas a fÕrmula para os deslocamentos
teve seus coeficientes alterados e assim o algoritmo continua de
terminando exatamente a velocidade de uma partícula submetida a
uma força resultante cúbica no tempo. Devido à alteração dos coe
ficientes de (3.45b) para (3.56b) os deslocamentos sao exatos ap~
nas para forças quadráticas no tempo.
Substituindo -as expressoes (3. 45) pelas -expressoes
(3.56) as matrizes na equação (3.51) passam a ser:
T 2 T 3 -1 6 e - 24 (K - e M C)
T T 2 1 K + C M- K
2 - 12 T 2 -1 12
(K - CM C)
(3.57a)
T 2 T 3 - C M-1 T M - } C - 24 (! C)
T T2 -1
M - z ~ 12 (K - CM C)
(3.57b)

40
-T2 T' 2 T' T 3 • -1 ~I -1 - F ) -I 24 .<: M + 24 _<; M F 24 (~º 3 - - 6 - - -o -1 p = +
2 T2 -1 T2 _!_ I - ~ C M-l _!_ I + TI_<; M ~l 12 <F - F ) 2 - 12 - - 2 - - -o -1
(3.57c)
O operador de integração para o caso de um grau de
liberdade se escreve agora:
A 1
(3.58)
Os autovalores da matriz A são complexos e de mi dulo unitário para qualquer intervalo de integração
T adotado e ~ e tal que
tg ~ (3.59) 5 2 2 W
4T
4
(1 - l2 w T + 144)
Dessa maneira o intervalo de integração passa a
ser escolhido de acordo com a distribuição espacial do carregame~
to e seu conteúdo de frequências, sem a preocupação com a instabi
lidade do algoritmo na avaliação da resposta correspondente aos
modos mais altos4
Note-se que o algoritmo obtido com a interpolação
linear das forças de inércia e também apenas condicionalmente es-
tâvel: T < 0.551 T o
(Newmark 1 y = 2 e

41
ff interessante notar que é possfvel modifici-lo de
maneira a torná-lo incondicionalmente estável e o algoritmo resu!
Cante [3] e o método da aceleração média constante da famflia de
Newmark, equaçoes (3.33), com 1
y = 2 e 1 s = 4 Como alternati-
va de solução das equações obtidas ·a partir da interpolação ciibi
ca das forças de inércia (3.45) ou (3.56), que não dobre o niimero
de equações do problema e trabalhe com matrizes simétricas, esti
a solução iterativa que e usada nos problemas não lineares e sera
vista adiante.
A partir da definição de erro relativo no período
é possfvel traçar curvas (Fig. 3.1) que relacionem esse erro (ex-
pressa em percentagem) com o parâmetro T/T o
para os algoritmos
apresentados.
A fig. 3.1 foi retirada da referência [2]
Aumento no
Perto d o ('%)
7
6
5
4
3
2
o
Wilson e=1.4/ /
I I . '
.' / Newmark
/ / V:o.5 I , ·
1 l' '0.25 .' ,'
/1 • I /1 ·/ /1 •/ / 1 ., ,, ·/ t,
/ /
/
/
/ .. I
., ,, i'
__ ,,,, .. .. -./
0.1 0.2 0.3 0.4
FIG. 3.1
/
/ I
/ Alo, lncond. ·Estovel. Eq.( 3.58)
Al9. Cond. Esravel. Eq. < 3. 52 >
0.5

42
Devido à não-linearidade na relação entre as for-
ças elásticas ~E
se escrevera:
e os deslocamentos u a equação de movimento
R = M u = F(t) - Cu - ~E (3.60)
onde:
(3.61)
Derivando (3.60) em relação ao tempo obtém-se:
. R M u F(t) - eu - K(u) u (3.62)
j â que:
. ~E
u K(u) u (3.63)
Linearizando (3.61) no intervalo de tempo T obtém-se:
~El
K -o
(3.64a)
': 1 (3.64b)
Observe-se que em (3.64b) -e mais consistente usar-se a matriz de
de rigidez tangente avaliada em ':i : ~l = ~(~ 1 ) no lugar
K = K(u) -o - -o
Isto não será feito para evitar o armazenamento si-
multâneo de duas matrizes de rigidez.

43
A linearização definida pelas expressoes (3.64)
possibilita uma solução direta para ~l e ~l resolvendo um sis
tema de ordem 2n análogo a (3. 48).
Ocorre que para cada intervalo de tempo uma nova
triangularização deverã ser feita, jâ que K nao -o e mais constante
ao longo do tempo, o que torna o procedimento pouco atrativo.
O algoritmo iterativo que sera usado aqui [2] uti-
liza as equaçoes (3.64) com a matriz
triz tangente modificada:
K -o
substituída por uma ma-
onde
K* -o
e a matriz de rigidez tangente avaliada apos
iterações com as equaçoes em sua forma original (3.64).
(3.65)
algumas
Com o uso da matriz modificada K* -o
é possível, g~
ralmente, se calcular as forças elásticas ~E ao final de cada
intervalo de tempo, por acumulação do valor . ~ .
no 1n1c1.o do interva
lo, ~EO com o produto em vez de se recalcular
a partir dos deslocamentos finais ~l
O esquema iterativo e descrito a seguir.
Inicialmente o vetor das forças de inércia ~l e
. sua derivada !l:i ao final do intervalo de tempo s ao estimados
por uma fÕrmula 11 predictor"; no caso:
. . !l:1 = R
-o (3.66a)
. !l:1 R + T R
-o -o (3.66b)

44
Esses valores sao levados às expressoes (3.44) ob
tendo-se uma primeira aproximaçao para ~l , ~l e '::1 M-l R - -1
Novos valores para ~l podem ser agora cal
culados por:
~l e '::1 (3.67a)
. . ~l !1 - ~º '::1 - e '::1 (3.67b)
e levados novamente a (3.44) para a obtenção de uma nova aproxim~
çao para '::i , '::i e '::1
O processo se repete ati ser satisfeito o critirio
de convergência adotado.
Ressalte-se que, apos algumas iterações, K -o
nas
expressoes (3.67) i substituída por K* , j ã definida anteriormen -o
te. As condições ao final do intervalo de tempo são tomadas como
condições iniciais para o próximo intervalo e o processo se repe
te ati ser completada a resposta no tempo,
A convergencia do processo iterativo descrito sera
estudada mais adiante.
O processo iterativo pode ser aplicado tambem a
problemas lineares desde que se use sempre as expressoes (3.46)no
lugar de (3 .67).
Observando-se as operaçoes:
M(~ - u ) - -1 -o
M '::1
T = TI (6 ~o+ T
. R -o
(3.68a)
(3.68b)

45
M(u - u - T ~) - -1 -o -o
(3.68c)
que sao efetuadas a cada iteração, nota-se q~e, para matrizes de
massa constantes no tempo, apenas uma triangularização da matriz
de massa é feita.
Observe-se também que as matrizes, ao contrário da
equaçao (3.48), conservam a ordem n e são simétricas o que e
vantajoso tanto no ponto de vista de memória interna quanto de
tempo de processamento.
Duas alternativas existem entao para problemas li-
neares:
- usar o algoritmo modificado incondicionalmente estável através
da equação (3.51),de ordem 2n ,com um intervalo de integração
função do problema especifico
usar o algoritmo condicionalmente estável, iterativo, com um in
tervalo de tempo definido pelo critério de convergência do pro
cesso iterativo.
Tudo indica que a primeira alternativa seria pref~
rível no caso em que os modos mais baixos dominam a resposta, já
que intervalos de integração maiores poderiam ser usados.
Para problemas de transientes curtos, como choques
e respostas ricas em frequências, que requerem intervalos de inte
gração da ordem de grandeza do período mínimo do modelo discreto,
a segunda alternativa é a indicada.
O algoritmo correspondente a primeira alternativa
ainda não foi aplicado a grandes sistemas estruturais embora pro
porcione_, nos exemplos apresentados em [3], resultados mais preci:_
sos do que os obtidos com o método de Wilson.

46
Para analisar a convergencia do processo iterativo
substitui-se as expressões (3.45) e (3.47) em (3.67) obtendo-se:
i+l ~1
~1
onde:
B = --o
=
A -o
B -o
~EO
+
A = -o
- K -o
- e
-
G
T 2 1 -K M-12 -o
[~o T
K + TI -o
T2 -1 u + 60 M -o -
M -1
-
(21
r;, + L:. º
T M-l (6 R TI - -o
(6 R -o
R + -o
que representa o processo iterativo:
-i+l -i R = P + A R
onde A e a matriz de iteração.
i )] . + T + ~1 -o
3 i ~ T --o
A condição necessária e suficiente para se
• i ~1
~1
(3.69)
(3.70a)
(3.70b)
(3. 71)
obter
convergência nesse processo e que os módulos dos autovalores da
matriz A sejam limitados pela unidade ~6]
Procurando alcançar resultados mais Úteis do que
aqueles apresentados em [2], a convergência serâ estudada para o
caso de um sistema massa-mola com amortecimento.

47
Nesse caso a matriz A se escreve:
6 T - (a 12 + b)
A
9 T2 6 ( + b _T) - ª 60 12
onde, por simplicidade, se tomou:
a =
os autovalores de A são complexos conjugados:
Desde que se verifique:
o que sempre ocorre nos casos de amortecimento positivo
o modulo dos autovalores e então:.
11- 1 = P
-A expressao acima pode ainda se escrever:
240 p 2
(3. 72)
(3.73a)
(3. 73b)
(3.74)
(3.75)
(b > O).
(3.76a)
(3. 76b)

48
relacionando o mÔdulo dos autovalores da matriz de iteração com
as características do sistema, eq. (3. 73), e o intervalo de tempo
adotado T •
Nesse ponto e interessante introduzir as relações:
a =
T = 8 T
(21T)2 T
(3.77a)
(3. 77b)
e tomar o amortecimento como uma fração do amortecimento crítico:
e ~ e . crit. ~ 2 M w
O parâmetro b passa a se escrever:
b 2 ~ w 41T ~ T
(3.77c)
(3.77d)
Substituindo-se o conjunto de relações (3.77) em (3.76b) ·obtém-se:
2 1T282 ~2 + 5 1T8 ç + ----zo- 3 p2
4 1T282 o (3.78)
que relaciona a taxa de amortecimento Ç
mÕdulo dos autovalores de A
e o parâmetro e com o
As raízes da equação do 29 grau em ç
1T8 5
rr 2 8 2 - ---
25
(3. 7 8) s ao:
(3. 79)
A condição para que o modulo dos autovalores de A
seja limitado por p acarreta:

49
(3. 80)
o que ocorre para os valores de ~ no intervalo entre as
da equação (3.78).
Introduzindo-se agora o conjunto de relaçÕes(3.77)
na desigualdade (3. 75) obtém-se:
(3.81)
-A expressao acima se anula em:
= rre (- ~ (3.82)
Portanto a região de autovalores complexos e aquela onde a desi -
gualdade (3.81) se verifica:
da forma:
~ < ~ 1 = - 1.61939 e
~ > ~ 2 - o.89388 e
Fora dessa região os autovalores de A -sao
(3.83a)
(3.83b)
reais
(3.84)
A condição para que tais autovalores tenham módulo
igual a p e:

50
1200(2rr) 2 6 2 1; 2 +. ~600(2rr) p 8 + 240(2rr) 3 8~ /; +
+ ~600 p 2 + 240 (2rr) 2 P 8 2 + 15 (2rr) "8~ o
(3.85)
Essa equaçao nao foi resolvida explicitamente, po-
rem, para cada par de valores p e 8 na região de interesse,
e possível calcular raízes /; 1 e
Os resultados obtidos ati aqui podem ser visualiza
dos fazendo-se sua representaçao no semi-plano i; - 8 (8 > O) , na
figura 3. 2 onde apenas o caso limite de convergência, p = 1 , está
representado.
A partir das semi-retas -,. oc e
-,. OB cujas equaçoes
sao, respectivamente:
- 1. 61939 8 (3.86a)
l;=-0.893888 (3.86b)
Definem-se as regioes:
- autovalores reais: região interior as semi-retas -,. oc e
-,. OB
- autovalores complexos: região externa dada pelas desigualdades
(3. 83)
Na região de autovalores complexos as curvas Al e
A2 sao a representação das ~
ra1zes e respectivamente,
dadas pela expressao (3.79), no caso limite p = 1
Essas curvas tendem assintoticamente para o eixo
8 = o Cada ramo da bifurcação que se observa entre B e. e cor
responde à condição de um dos dois autovalores reais de A apr~

51
sentar módulo unitârio.
Dessa maneira a regiao de convergencia e aquela in
terior as curvas Al e A2 e ao ramo inferior da bifurcação en-
tre B e e .
Para valores de p < 1 obtém-se curvas semelhan-
tes e interiores a Al e A2 cada vez mais próximas da origem,
com a propriedade de se encontrarem sempre sobre a semi-reta
cuja equação:
_,_ OA
Tr s e (3.87)
e obtida a partir de (3.79)
Para o caso de amortecimento positivo a figura 3.3
mostra as curvas Al para alguns valores de p
No problema nao amortecido a situação se simplifi-
ca. Fazendo-se i; = o em (3.78) obtêm-se:
p 92 (3.88)
que dâ origem ao grâfico da figura 3.4.
O valor limite de e para que haja convergencia
corresponde ao caso p 1 e, de (3.88) obtêm-se:
e . = o.626 cr1t. ( 3. 89)
e o intervalo de integração deverá ser:
T < 0.626 T (3.90)

52
Observe-se que a convergencia em um intervalo de
tempo e mais rápida a medida que se diminui T (fig. 3.2, 3.3)
porem isto acarreta um numero maior de intervalos de
para se descrever o mesmo intervalo total.
integração
Para cada problema especifico deverá existir entao
um intervalo de integração Ótimo, com relação ao tempo de execu-
çao, que pode ser determinado por tentativas a partir de (3.90).
Normalmente, este intervalo de tempo atende também
a condição de estabilidade, eq. (3.55).
As conclus~es relativas ~ converg~ncia,obtidas aqui,
podem ser extendidas ao caso não-linear levando-se em conta que a
matriz de iteração ~ , devido à variação da rigidez da mola, se-
ra apenas seccionalmente constante ao longo da integração.

e= .r.. T
1.0
0.9
o.~
0.4
03
0.2
0.1
- 2.2 -1.8 -L6 -1.4 - 1.2 - 2. O -1.0
- 0.8 -0.8 -0.4 -0.2 o.o 0.2
FIG. 3.2
0.4 0.8 o.e 1.0
1.2 1.4 1.8 LI 2.0
2.2 2.4 2.8
v> w

J' '1.0
0.3
0.2
0.1
o.o'----------------------------------------------+------0.2 0.4 o.e o.a 1.0 1.2 1.4 1.8 ,.
e ~ ·-e crtt.
FIG. 3.3
'·" .,_,

1.0
0.9
o.a
0.7
0.6
O.OI
0.4
0.3
0.2
0.1
o.o
f-lÀI
8: Í '---===::....,..----,---~-----.----..----~-- T
0.1 0.2 0.3 0.4 o.a 0.8
FIG. 5.4

56
IV - PROCEDIMENTOS IMPLEMENTADOS~ EXEMPLOS - CONCLUSÕES
4.1 - INTRODUÇÃO
Neste capítulo ê feita a aplicação do algoritmo
condicionalmente estável, obtido pela interpolação ciibica das for
ças de inércia, visto no capítulo anterior, ao caso da resposta
dinâmica de estruturas reticuladas submetidas a solicitações de
natureza determinista.
Adotou-se o processo iterativo que usa a matriz de
rigidez tangente modificada
nearidade geométrica.
K* -o e é considerado o caso da não-li
As equações de movimento sao ,obtidas a partir do
princípio de Hamilton com a discretização espacial feita pelo me
todo dos elementos finitos.
4.2 - ELEMENTOS IMPLANTADOS
Foram implantados cinco tipos de elementos finitos
derivados de dois tipos básicos: o pórtico plano e a treliça esp~
cial. são identificados, no programa, pela variável ITIPO
!TIPO = 1 - Pórtico Plano
ITIPO 2 - Treliça Plana
ITIPO 3 - Cabo Plano
ITIPO = 4 - Treliça Espacial
!TIPO = 5 - Cabo Espacial
Ós elementos de cabo sao usados apenas em análise
não-linear e diferem dos elementos de treliça somente no fato de
nao oferecerem resistência a compressao. Suas matrizes de rigi-
dez sao relacionadas por:

57
Kdàbd = H(E) Ktteliça X
onde H(E ) X
e a funçio degrau de Heaviside:
e E X
(t-t)/t o o
tante considerado.
H(E ) X
H(E ) X
o
1
E < Ü X
E > 0 X
e a deformação unitária do elemento no
( 4. l)
(4.2)
ins
Os elementos podem ser combinados em dois grupos
a) elementos dos tipos 1, 2 e 3
b) elementos dos tipos 4 e 5
permitindo a anilise de p5rticos planos enrigecidos com cabos e/6u
elementos de treliça, estruturas planas formadas por elementos de
cabo e/ou treliça (a) e estruturas espaciais formadas por elemen
tos de cabo e/ou treliça (b)
As matrizes de massa sao idênticas para os elemen-
tos de cabo e treliça.
de ordem
6 X 6
Todos os elementos apresentam matrizes
correspondentes a 3 grius de liberdade por no. Os elemen-
tos planos de treli·ça e cabo tem as suas matrizes com as linhas e
colunas correspondentes ao terceiro grau de liberdade nulas para
poderem ser combinados diretamente com elementos de pÕrtico plano.
No que se segue, apenas serao mostradas as expres-
soes correspondentes aos elementos básicos: pÔrtico plano e tre-
liça espacial.
58
4.2.1 - Matrizes de Massa
As matrizes de massa dos elementos surgem, quando
da aplicação do princípio de Hamilton, a partir da expressão da
energia cinética:
T ( 4. 3)
onde:
µ - massa específica do material
v = velocidade do elemento dV
V= volume do elemento finito
a) Elemento de PÕrtico Plano
Considera-se o elemento de pÕrtico plano de eixo
reto de comprimento L e seção transversal constante de area A,
simétrica em relação ao plano de carregamento.
Supondo-se a conservaçao das seçoes planas durante
a flexão e desprezando-se a deformação por cisalhamento tem-se p~
ra o deslocamento longitudinal dos pontos de ordenada
ção ao centro de gravidade da seção:
u = u* - z av ãx
z
onde u* = ui z=O
transversal e v
e o deslocamento longitudinal do C.G. da
e o deslocamento transversal da seção.
A energia cinética (4.3) se escreve:
dAdx
em rela
( 4. 4)
seçao
( 4. 5)

59
Levando (4. 4) a (4. 5) e integrando-se sobre a are a
da seção transversal obtim-se:
T 1 2 µ A f +
L
1 2 µ A f
L
• 2 u* 1
dx + 2
onde J e o momento de inêrcia da seção, e a energia cinética to
tal estã separada em parcelas que correspondem, respectivamente,
as translações vertical e horizontal e à rotação da seção trans -
ver sal.
Introduzindo as funções de interpolação:
u* = N q -u -
V ~V 9
na expressão da energia cinitica (4.6) obtim-se:
T • T s
onde N - ;V' X
d N dx -v
N -v + N T
-u
Desenvolvendo-se a parcela:
do princípio de Hamilton tem-se:
N + N T -v -u
que, integrada por partes, resulta em:
g dx
s óg dt
( 4. 7 a)
(4.7b)
( 4. 8)
( 4. 9)
(4.10)

ou ainda:
N -v
+ N T -u
60
N l + J Íi, ! N J } dx g -~ ~v,x -~,x
Óq dt (4.lla)
(4.llb)
onde Me e a matriz de massa, ji que, pelo princípio de Hamilton:
= o (4.12)
Empregando-se funç~és de interpolaçio de Hermite,
lineares para o deslocamento u* :
o o X
L o
e cúbicas para o deslocamento transversal v
~V = [o ( X 2
X 1 - -) L
o
(4.13a)
-(- - 1) x2
X J L L
(4.13b)
e considerando os Uesiocamentos nodais g segundo a fig . (4.1):
. .'J .. ---i)>---------q-& __ J_._q-5
-,,~------s,:, X, u
ql 2 q4
FIG. 4.1

61
obtém-se a matriz de massa consistente para o elemento de pórtico
plano:
11 o o 1 o o l rc o o o o o l 6
1
13 . 11 9 13 6 .l_ 6 1 1 35 210 L o 70 420 L 5L 10
o. - 5L 10 1 1 2 13 1 2
1 2L 1 L 105 L o 420 L - 140 L TI o 10 - 30
Me \J AL 1 1 + )J J
3 o o o o o S I M • s I M •
13 11 1 6 1 35 - 210 L 1
l 5L 10
1
1 j 2L J 105 L 15
(4.14)
onde a primeira parcela corresponde a inércia de translação
segunda ã inércia de rotação.
e a
A matriz de massa é dita consistente quando sao
usadas na avaliação da energia cinética as mesmas funções de in
terpolação que são utilizadas no cálculo da energia de deformação
no principio de Hamilton.
O conceito de matriz de massa consistente se deve
a Archer [29] e antes desse seu trabalho apenas matrizes de massa
diagonais, obtidas concentrando-se massas nos pontos nodais, eram
empregadas.
A formulação consistente mantém a propriedade do
método de Ritz de fornecer as frequências do modelo discreto sem-
premais altas do que os valores exatos.
Entre as matrizes de massa nao consistentes, sao
de particular interesse aquelas que se apresentam em forma diago
nal jã que tornam explicito o algoritmo de integração aqui empre-

62
gado. Ressalte-se tambêm que as matrizes co-õ.sistentes sempre
acarretam maior esforço computacional mas nem sempre levam a me
lhores resultados [9, 22, 24]
O procedimento descrito em [22] e aplicado t anib êm
em [24] para a obtenção de uma matriz de massa diagonal para ele-
mentas isoparamétricos quadráticos resume-se em distribuir a mas
sa total do elemento proporcionalmente aos coeficientes da diago
nal principal da matriz consistente do elemento.
A matriz de massa diagonal para o elemento de por-
tico plano empregada nesse trabalho ê obtida a partir da matriz
consistente segundo o procedimento, descrito em [21], que se es-
creve:
D + mll mll ml4
D + m25 m22 = m22
D + m36 m33 m33
( 4. 15) D
m44 m41 + m44
D + mss = m52 mss
D + m66 m36 m66
A matriz resultante e:
Me G JJ AL 1
AL 1 3 1 1 1 JJ AL~ - jJ 420 JJ AL - JJ AL - JJ AL 420 + 2 2 2
+ [ o o 1 10 JJ JL o o 110 ~ JL J (4.16),
onde a segunda parcela provem da inércia de rotação.
63
No programa em apindice duas variiveis, MASSA e
INROT, controlam a c,nstruçao da matriz de massa da estrutura de
acordo com os valores que assumem:
MASSA= 1
MASSA= 2
MASSA= 3
INROT o
INROT 1 O
e montada a matriz de massa consistente
e montada a matriz de massa diagonal
no caso da matriz de massa global ser diagonal po-
rem construida a partir de elementos escalares li-
dos pelo programa. Nesse caso a massa específica
dos elementos MESP(I) deve ser nula.
nao e levada em conta a parcela correspondente a
in~rcia de rotaçio na montagem das matrizes consis
tentes ou diagonais dos elementos.
a parcela de inercia de rotaçao e considerada.
Observe-se que, em todos os casos, sao ainda leva
das em consideração as massas discretas introduzidas como elemen-
tos escalares pela matriz ED(I, J) conforme o item 4.3.
b) Elemento_de_Trelisa_EsEacial
A matriz de massa para o elemento de treliça espa
cial pode ser obtida utilizando-se a expressão da energia cineti-
ca:
onde U , V e w
direções usuais
T 1 2 ~µ(~2
V
dV (4.17)
sao as componentes do deslocamento segundo as
X ' y e z e as funções de interpolação:

64
u N g -u
V = N g (4.18) -v
w = N g -w
Levando-se (4.18) a (4.17) e por procedimentos análogos aos já
vistos no caso do elemento de p6rtico plano obtim-se a matriz de
massa do elemento de treliça espacial:
~ 11 J ~u T Nu + Nv T Nv + Nw T NJ dV
V
(4.19)
Empregando-se as funções de interpolação de Hermi-
te lineares para .os deslocamentos u, v e w e adotando-se os
deslocamentos nodais segundo a fig. 4.2:
FIG. 4.2
obtêm-se a matriz de massa consistente do elemento:
1 o .o 1 o o 3 6
1 o o 1 o 3 6
1 o o 1 3 6
Me µ AL 1 (4.20)
3 o o
s I M 1 3 o
1 _\ 3

65
A construçao de uma matriz diagonal i Õbvia, nesse
caso, bastando alocar metade da massa total do elemento a cada um
dos nÕs. A mesma matriz pode ser obtida substituindo-se as fun-
çÕes de interpolação lineares (4.13a) por funções
___ v_i_s_i_d_e ,__f_~g .• _4. 3_. __
degrau de Hea-
+- L/2 -t- L/2--+-
FIG. 4.3
N1 = H(x) - H(x - ~)
H(x - !'.) 2
(4.20a)
(4.20b)
Ainda a mesma matriz e obtida adotando-se o procedimento usado an
teriormente no caso do pÕrtico plano.
A matriz resultante e:
4.2.2 - Matrizes de Rigidez
1 2
1 2
1 2
1 2
A matriz de rigidez do elemento provem,
aplicação do princípio de Hamilton, da parcela
deformação associada ao deslocamento virtual ou
ou
(4.21)
quando da
energia de
Serão deduzidas a matriz de rigidez para o elemen
to de pÕrtico plano e, a partir dela, a matriz para o elemento de
treliça espacial.
A energia de deformação e definida por:
u = i f V
T E: o dV (4.22)

66
onde:
E e o vetor de deformações específicas
cr e o vetor de tensoes associado
Para materiais elásticos lineares a relação entre tensoes e defor
mações ê dada pela lei de Hooke generalizada:
O = E E (4.23)
onde E e uma matriz de constantes elásticas e a expressão(4.22)
se escreve:
u 1 2 J ET E E dV
V
(4.24)
De acordo com as hipóteses assumidas no item 2.2.1
a respeito do elemento de pórtico, o vetor de deformações especí
ficas se reduz a E e (4.23) e (4.24) se escrevem: X
tensoes:
au ax e mantendo
u 1 E 2
E E X
2 E dV
X
(4.25)
(4.26)
A partir da expressao da teoria do estado plano de
E XX
Desprezando-se o termo .!. (~) 2 2 ax em
(4.27)
presença de
já que e a contribuição de ordem mais

67
baixa de v(x) incluindo deformação flexão ô 2 v , e por - z e dX 2
deformação inicial E tem-se [ 3 O] o
dU 1 c"v) 2 d 2 v (4.28) E = E + dX
+ 2 - z X o ax
dX 2
Substituindo-se (4.28) em (4.26) e assumindo fun-
çÕes de interpolação para os campos de deslocamento:
N N1 i (4.29a) u = :! = q -u u
N Ni i (4.29b) V = :! = q -v V
onde :! sao os deslocamentos nodais da fig. 3.1 e vale a conven
ção da soma sobre os Índices repetidos, tem-se a energia de defoE
mação expressa em função dos deslocamentos nodais:
locando-se a sua variação na forma:
ou= a q. a q. q. o q.
J l J l
ou, em notaçao matricial:
ou
-
U = U(q.) .Co l
(4.30a)
(4.30b)
chega-se a expressao dos elementos da matriz de rigidez:
-
k .. = lJ a q. a q.
l J (4.31)
Desprezando-se na expressao da energia de deforma-
çao (4.26) os termos de grau menor que 2 nos deslocamentos nodais
;! por não contribuírem para a matriz de rigidez (4.31) obtém-se:

68
u 1 E
~ ru2 + 2 2
v2 ~ dV + 2
.Z V + E L ,x ,xx o ,x
1 E ~ [t v4
v2 ~ dV + + - + u 2 ,x ,x ,x
1 + 2 E f . rz.v L ,xx
(2 u ,x
+ v 2 . jl , X '.J dV (4.32)
V
onde as vfrgulas denotam derivação.
A Última integral e nula. Desprezando-se a segun-
da integral em presença da primeira, introduzindo-se as funções
de interpolação (4.29) e usando a expressão (4.31) obtem-se:
k .. ]. J = EA J
L
+ EA E o
i N• N j u,x u,x dx + EJ J
L
i N v,x
N J dx v,x
i N v,xx
dx +
Usando-se as funções de interpolação (4.13),
se, em forma matricial explícita:
1 o o - 1 o o
o o o o o
EA o o o o
Ke = + L 1 o o
s I M o o
o
(4.33)
tem-

69
o o o o o o o o o o o o
l 12 6 o · 12 . 6 6 .. 1 6 1 L' i2 L' L2 5L 10
o 5L 10'.
4 o ·5 2 . 2. 1 L L - i2 L 15 L o 10 + EJ + EA E
30 o
o o o o o o 12 6 6 1 1' -i! 51 10
4 2 . L 15 L
As duas primeiras parcelas correspondem ã matriz de rigi
dez linear do elemento de pórtico plano e a Última parcela , e a
chamada matriz de rigidez geométrica, onde:
N = EA (4.35)
i o esforço normal calculado no inrcio do intervalo de integraçio.
b) Elemento_de_Treli~a_Eseacial
Sua matriz de rigidez pode ser obtida pelo procedi
a2 v menta visto anteriormente retirando-se a parcela - z -- cor-
ax2 respondente a flexão, na expressão (4.28) e introduzindo o termo
Conservando-se apenas os termos quadráticos nos
deslocamentos nodais g na expressão da energia de
tem-se:
U = _l E 1 tu 2 + E 2 ,x o
V
(v2 + w2 ;l ,x ,x J dV
"deformação
(4.36)
Introduzindo-se as funções de interpolação linea-
res e aplicando a expressão (4.31) obtém-se, em forma matricial:

explícita:
1 o
o
o
o
o
- 1
o
o
1
4.3 - ELEMENTOS ESCALARES
o
o
o
o
o
o
o
o
o
o
oj
70
EA E: · . o +---
L
ro o
1
o
o
1
o
o
o
o
o
- 1
o
o
1
o
o
- 1
o
o
1
(4.37)
são chamados de elementos escalares, ou discretos,
as molas,amortecedores e massas discretas que podem ser
das à estrutura nos seus pontos nodais.
associa-
No programa implementado, atuam sempre segundo di
reçoes globais estando associadas a eles forças elâsticas, dissi
pativas ou de inércia, atuantes nessas mesmas direções.
As molas sao supostas lineares de constante k e 1
os amortecedores do tipo viscoso linear de constante ci•
As constantes dos elementos escalares (m , c , k)
sao somadas diretamente ao termo da diagonal principal da matriz
global correspondente (M , C , !) , na linha associada ã direção
em que o elemento atua.
A introdução dos elementos escalares ê feita atra-
ves do vetor NO(I) que guarda o número dos nos com elementos
escalares, e da matriz ED (I , J) cuja .linha I armazena as cons
tantes dos elementos do no de numero NO(I) na seguinte ordem:

71
J = 1, 2, 3 - massas segundo as direç;es globais 1, 2 e 3
J 4, 5, 6 - constantes dos amortecedores segundo as
ç;es globais 1, 2 e 3
J = 7, 8, 9 - constantes das molas segundo as direç;es
b ais · 1, 2 e 3
dire-
glo-
I varia de 1 atê NNED numero de nos com algum elemento discre
to.
4.4 - MATRIZ DE AMORTECIMENTO
Conforme visto no item 3.2.1 o modelo de amorteci-
menta mais usado é o amortecimento viscoso linear que, introduzi-
do diretamente no modelo discreto, dâ origem ao termo
equação de movimento (3.13)
c u na
matriz c
Para que o amortecimento seja dito proporcional, a
deverá ser expressa pela serie de Caughey [5]
c M l: a. ~-1 0 i i - :L l_:: :J (4. 38)
Em [3~] dois processos sao apresentados para o cálculo de c . o
primeiro determina os coeficientes a. l
de maneira a introduzir
uma fração estipulada do amortecimento crítico em cada modo. O
segundo, mais direto, expressa a matriz c como uma soma de ma-
trizes, cada uma delas introduzindo o amortecimento desejado em
cada modo.
Como a matriz obtida nao e em banda, e sugerida em
[32] a zeragem dos termos fora de uma certa banda.
Uma forma muito usada para a matriz e e a corres
pondente ao amorteciemnto de Rayleigh e pode ser obtida a partir
dos dois primeiros termos (i o i 1) da serie de ~Cauihey:

72
e= a M + a1
K o -
(4.39)
Quando o amortecimento varia sensivelmente ao lon-
go da estrutura é possível [12] se estabelecer diferentes valo-
re s de
frações
a o
e para diferentes .r·egiÕes da estrutura adotando
do amortecimento crítico convenientes. O amortecimen
to obtido nesse caso não ê proporcional.
Muitas vezes ê vantajoso, do ponto de vista compu
tacional, o uso de uma matriz de amortecimento diagonal e em [33]
sao apresentados procedimentos para a sua obtenção.
Em todos os casos os valores numéricos para os fa-
tores de amortecimento em cada modo ( i; . ) são estimados ou basea 1
dos em dados experimentais da estrutura ou de o"utras estruturas de
geometria e materiais semelhantes.
O programa incluido em apêndice apresenta as se-
guintes alternativas de acordo com o valor assumido pela variável
de controle IAMOR:
IAMOR = 1 - Não se considera amortecimento, nao
as operações correspondentes.
sendo
IAMOR = 2 - O programa monta a matriz de amortecimento
C =ALFA* M +BETA* K onde ALFA e BETA
efetuadas
na f arma
sao pa-
râmetros lidos e as matrizes M e K são globais e
calculadas em t = o são tambêm considerados os amortecedores discretos in
traduzidos pela matriz ED
· IAMOR = 3 - A matriz de amortecimento, considerada simêtrica e de
mesma largura de banda de M e ; , e lida como um
vetor C(I) que contêm apenas os elementos incluídos
em sua banda superior.

73
Uma outra alternativa que pode ser implantada sem
maiores dificuldades e a formação de matrizes de amortecimento a
nível de elemento da forma onde ALFA
e BETA são fornecidos para cada elemento. A matriz global seria
montada por acumulação como no caso de M e K
No caso de se tomar, para um sistema de um grau de
liberdade, o amortecimento na forma:
c = a m + S k (4.40)
e exprimindo-o como uma fração do amortecimento crítico:
c = i; c • cr1t.
= 2 I; m w (4.41)
conclui-se, de (4.40) e (4.41), que:
"Í (~ + S w) (4.42)
Os resultados obtidos a partir do estudo da conver
gência do processo iterativo no caso linear e para um grau de li
berdade podem ser extendidos ao caso de vários graus de liberdade
desde que o amortecimento seja do tipo proporcional. Nesse caso
o sistema se desacopla e, no modo i o amortecimento introduzi-
do e dado por (4.42) com w = w. 1
Adotando-se um intervalo de integração T e poss.!.
vel, com o uso da fig. 3.2, verificar se os pontos
vos da integração de cada modo, p. ( i;. 1 1
1 (~ 2 w.
1
+ B w.) 1
8.) 1
com:
representa ti-
(4.43a)

e. 1
7 !,
·, T
T. = 2rr wi 1
estao na regiao de convergencia.
(4.43b)
Normalmente o modo crítico ê o modo correspondente
a frequência de corte bastando verificar o ponto 8 ) n
i;n 1 (-ª- + B w ) 2 w max
(4.44a) max
8 T
2rr w n max (4-44b)
Muitas vezes e necessário adotar um intervalo de
integração menor do que o correspondente ao caso nio-amortecido o
que constitui uma desvantagem inerente ao processo iterativo de
solução e nao ao algoritmo de integração em si.
4.5 - VETOR DE EXCITAÇÕES EXTERNAS
O vetor F de excitações externas do modelo dis-
ereto (3.13) provêm, quando da aplicação do princípio de Hamilm~
da parcela trab3lho virtual das forças não conservativas.
sua forma geral, a nível de elemento, e:
J vol.
dV + J sup.
(4.45)
onde b e t sao forças de volume e superfície respectivamente.
O vetor de forças nodais equivalentes e dito
consistente se são usadas em (4.45) as mesmas funções de interpo
lação usadas na expressão da energia de deformação.
Assim, uma formulação e dita consistente quando
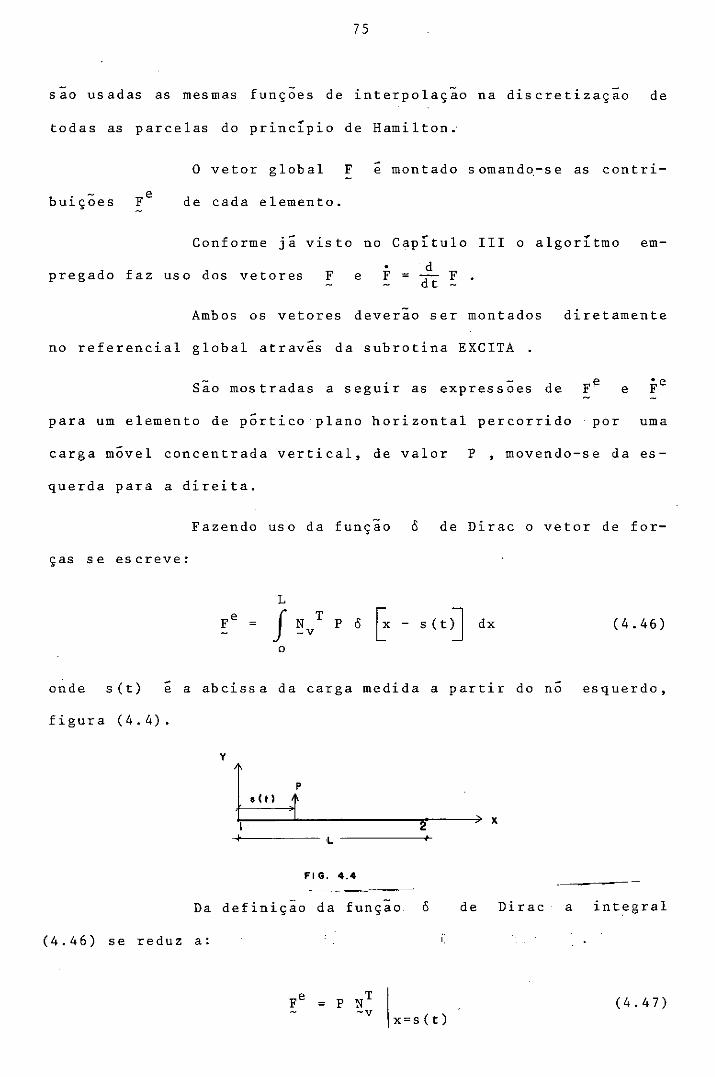
75
sao usadas as mesmas funções de interpolaçio na discretizaçio de
todas as parcelas do princ{pio de Hamilton,
O vetor global F e montado somand~-se as contri-
buiçÕes de cada elemento.
Conforme jã visto no Cap{tulo III o algoritmo em-
pregado faz uso dos vetores F e • d F = - F - d t -
Ambos os vetores deverão ser montados diretamente
no referencial global através da subrotina EXCITA
são mostradas a seguir as expressoes de
para um elemento de pÕrtico plano horizontal percorrido
e • e F
por uma
carga mõvel concentrada vertical, de valor P , movendo-se da es
querda para a direita.
ças se escreve:
onde s ( t) e a
figura ( 4. 4) .
(4.46) se reduz
Fazendo uso da funçio o de Dirac o vetor de for-
L
f N T P o -V G - s (t~ dx
o
abcissa da carga medida a
y
l p
• ( t) ,t 1 2
'L
FIG. 4.4
Da definiçio da funçio o
a:
Fe = p NT 1 -v
'
x=s(t)
partir do
) X
de Dirac
(4.46)
no esquerdo,
a int.egral
(4.47)

Derivando-se o
pe
ou ainda:
onde V ( t)
= p
ds dt
76
vetor Fe obtem-se:
r FS(,J
d ~VT
= dt
Fe = P v(t) d ds
~; SªS ,,J p d
ds
e a velocidade da carga móvel.
ds dt (4.48)
(4.49)
As expressoes (4.47) e (4.49) sao calculadas auto
maticamente pela subrotina EXCITA listada em apêndice.
O trecho da estrutura percorrido pela carga móvel
deverá ser horizontal e ter seus elementos numerados sequencial-
mente, da esquerda para a direita, de 1 a NEP (número total de ele
mentos percorridos).
querda.
Em cada elemento, o nó 1 deverá ser o da es
4.6 - CRITÉRIO DE CONVERG~NCIA
Em todos os processos iterativos e necessário deci
dir se o resultado de uma iteração está suficientemente próximo
da solu-ção exata, desconhecida, ou s·e e necessário efetuar-se mais
uma iteração. Adota-se entao um critério de convergencia para
que essa decisão seja tomada.
Dados dois vetores e correspondentes
as i teraçÕes J e j + 1 respectivamente~ o critério de conver
gincia adotado se· escreve:

7 7
li vj+l - vj li
li vj li < y ( 4. 50)
onde y é a tolerância especificada e 11 • 11 indica a norma ve-
torial empregada, que no caso foi a norma euclideana:
li V IIE =
~
n li E V~ .
i=l i J (4.51)
Mais considerações sobre critérios de convergencia
na solução de problemas estruturais não-lineares
iterativos são encontradas na ref. [34]
processos
O critério adotado, equaçao (4.50), ê aplicado, em
análise não-linear, ao vetor incremento de deslocamentos llu , P.'.:
ra o cálculo da matriz K* -o
1 - (K + K_
1) (vide fluxograma).
2 -o
Em todas as análises, para se interromper o prece~
so iterativo, o mesmo critério e aplicado ao vetor R = M u , de-
rivada das forças de inércia, por estar ligado ã derivada mais al
ta, em relação ao tempo, do vetor de deslocamentos u

78
4.7 FLUXOGRAMA
1 Inicio 1 !
1 Leitura dos dados 1
1 DeflniqÔ o 41 conatonU•
! IIOt1ta1en1 dat matrlr.11 globais ! • !o
• do vetor !!,•o
l ; 1 1 ,3
1 IAMOR
•2 Leitura da Matrt1 g 1
11,n,a1•• de E zsol!+f!'!o
l .FALSE.
: NNED;i.t 1
.TRUE.
1 lotfodução do
oaortecedort• llscretos
-~ ,, o.
1•T= O
BOOL•.fALSE.
,, 1 CARIIEG 1
•2
•••clollzac;ão •• vortáwel•
r1lot1va1 o cario ' •• .,.1 ., .• ......... do f( ti o !ltl
! l llllrcNhlção ••• eoa•1i;:ÕH •• cNtono .. M 1
1 o
1

7 9
• !
1 llnpreuõo dOI Matr1.z .. !! ,, ~ e !§. 1 1
Cálculo da aceleração iatctol otrave, de
R = IIÂ.i =F •• -.. •• l
= 1 IAIIOR
I 1
1 CCÍlculo do ;Jo .1 .•
1 . . .!to='o·Siio
Q INT= INT-t-1 t : INT -:M TAU
BOOL=.FALSE.
ITERA • O
Fórmula PREDICTOR . , ..tt, =!o
1
11 = !o+ G ~ o
l Cálculo auxiliar
Ti-< 8]o+l; ~o>
2 • ~(21 R0+3G!l.,) 6 - -
l = 1 1
CARREGI '
• 2
Atu olizaçõo •• parâmetro,
retat1vo1 a corto móvel
' • Monto9e1n •• f( t) • flt)
b

80
•
ITERA , ITERA+ 1
!'ITERA
_ .. 1 .1 1 Obttni;ao de y .4!! • A! otravea de:
Míii = R1 --· ... , . i 1i , 1 • 1 llt.u , _ < e•-,1õ•-H 1-1iiR1 > "" - 12 .!.'O ~"O- "' ~
i • ..,_2 • 1 ·1 11(6u-1õu ),-'!.. (21 R+51õR•9R-21óR) "' "' -. 80 -o -o -, ....
,, ~----'-~IAIIOR
eâi1cu10 dt Cii1 • ci1 ...... , ...... ,
.TRUE, IOOL,OR,(TIP,.N,EQ,I) 1------ol
.f'ALSE,
.FALSE. ITERA<t
.TRUE,
IJJ191 JlyHIJ ---· T_R_U_E_ • ..., . 1 <;roL
!AJ( j
.FALIE,
ITERA. GE, ITIIAX ,f'ALSE.
.TRUE,
6
,i , l•I !, = I! 1
Ri_ R i+I ... 1 - ... 1
a_J-'= a .... i
2

81
A111at1acu;ão da Geo1n.tria
• 1 K 0 , K0=-( K0+K1) - - 2 - -
IOOL•.TRU!.
< TOL21--·f_A_LS_!_. ___ ~
ITERA.GE.ITIIAX .FALSE.
.TRUE.
lmprHt ÕO doa resulta dos H
INT é MÚitipio .. IIIPRES
lmpr111ão doa rHultados;
proce11a•ento interroapido
.TRUE. t ,> TF 1--------------il F 111
.FALSE.
R , R~I -o ... ,
!0=6:·1
JJ.=s: !o=s!
TIPAN
Re:Re+K6• 1
"' o .., o ........
'1~-"'---, 11-------i TIPAN
,z
Atualização da Geoaetrla
Monto1•• clt !o
,ao confl1uracão atual
,5 TI PA N 1-------,
Monta1e11 de !o• !•o
na conHguroção atual
lapre11ão de Hforooa ••
INT ~ m~ltiplo de UIPRES
,_ __ .,

82
4.8 - EXEMPLOS DE APLICAÇÃO
são apresentados a seguir alguns resultados obti
dos utilizando-se o algorrtmo ji descrito e implementado no pro
grama listado em Apêndice.
Foi desenvolvido também um programa auxiliar atra-
ves do qual as caracteristicas din~micas dos modelos discretos
(frequências e modos naturais) foram determinadas.
EXEMPLO I
Como primeiro exemplo tomou-se o problema de vibr~
çoes longitudinais de uma haste homogênea, de seçao transversal
constante, mostrada na figura 4.5 onde os dados estao num sistema
de unidades coerentes. Uma das extremidades da haste e fixa e a
outra foi submetida a uma carga cuja variação no tempo e dada tam
bem na figura 4.5.
8 E=0.2xl0
,.. o. 8
AI: 0. 1 F( t)
:!-------------- -
+------,~oo------+
FIG. 4.5
;;, -4
1 10 s
;, t
A discretização espacial foi feita por meio de 40
elementos de treliça .plana de mesmo comprimento.
O modelo discreto obtido com o uso da matriz de
massa consistente apresenta o petrodo fundamental
= 0.4 10- 2 s e o período 4 •
m1.n1.mo, correspondente a
T max T•
f =
frequência de

83
corte, T . m1.n
. -4 = 0,4537 10 s Os valores exatos (modelo contínuo)
[s] sao, respectivamente., -2
Tf = .0.4 x 10. s e -4 r
40 = 0.5063 10 s.
Foram analisados dois intervalos de· tempo T = 0.1 -4
10 s,
correspondente a 0,0025 Tf e 0.220 T . m1.n e
-4 T~= 0.2 10 s,corres
pondente a 0.005 Tf e 0.441 T . m1.n
Os diagramas do esforço normal ao longo da haste, para
alguns valores de t encontram-se nas figuras 6.. 7 e 4. 8 onde coe~
forço normal de compressio foi tomado como positivo. A soluçio exa
ta do problema contínuo ê tambêm apresentada na mesma figura.
Ambos os intervalos de integração levam a resulta
dos satisfatórios nao se observando uma melhora significativa ao
se diminuir o intervalo para -4
T = 0.1 10 S
Adotando-se a matriz de massa diagonal, o modelo
discreto obtido apresenta o período fundamental
e o período mínimo T . m1.n
-4 = 0.7855 10 s
Tmax = Tf
Foram analisados os mesmos intervalos de
T = 0.1 10- 4 s = 0.127 T . m1.n
e T -4
0.2 10 s 0.255 T . m1.n
= 0.4
tempo:
e al-
guns resultados encontram-se nas figuras 4.9 e 4.10. Tambêm nes-
se caso os resultados para os dois intervalos de integração sao
satisfatórios, confirmando as conclusões da referência [35] segu~
do as quais a matriz de massa consistente não apresenta, nesse ca
so, melhor convergência, para as frequências e modos naturais, do
que a matriz de massa diagonal adotada.
Observe-se que o uso da matriz de massa diagonal,
além de tornar o algoritmo explícito, dá origem a um modelo dis-
ereto cuja frequência de corte ê inferior à do modelo consistente
o que torna mais rápida a convergência do processo iterativo (fi-
gura3.2). Isto acarretou, para -4
T = O. 2 10 s , um tempo de processamento·

84
da ordem de 40% do te~po do processamento gasto ao se utilizar a matriz consis
tente.
Em todos os casos adotou-se TOL2 = 0.1 10- 3
Em seguida considerou-se o mesmo problema para o
caso em que a haste ê composta de dois materiais com mÕdulos de
elasticidade diferentes como indicado na figura 4.6.
8 E
1 :0.8 X 10
c1
=10 000
FIG. 4.6
8 E=0.2xl0 2
e = 5 ao o 2
As características dinâmicas dos modelos sao agora:
massa consistente T = 0.2552 l0- 2 s T . min
massa diagonal
max
T = 0.2552 l0- 2 s max T • min
-4 0.3938 10 s
Para o caso de matriz de massa diagonal foram ana-
lisados os intervalos de integração -4 T = 0.1 10 s = 0.254 T . e min
T = 0.2 10- 4 s = 0.508 T . e alguns resultados estao, min
com a solução exata, nas figuras 4.12 e.4.13.
Já ao se fazer uso da matriz consistente
juntamente
apenas o
intervalo T = 0.1 10- 4 s = 0.437 T . min pode ser analisado (figura
4.11) uma vez que o intervalo T = 0.2 l0- 4 s = 0.875 T . está fo min
ra da região de convergência do processo iterativo (figura 3.2)

85
DIAGRAMAS DO ESFORÇO NORMAL AO LONGO DA HASTE
2.0
1.,
1.0
1.0
o.
FIG.4.7
Mo11a Conslltente ;,:0.00001 1
-3 t= 0.4 a 10 1
-3 t=o.e x 10 ,
-3 t: 1. 2 1 10 1
-3 t=2.1110 1

86
DIAGRAMAS DO ESFORÇO NORMAL AO LONGO DA HASTE
2.0
L~
1.0
1.0
o.
o.o,r1,~-=-=.-r:=----'=,ç--------=.,.....---
-0.
-1.0
FIG. 4.1
Con1l1tent, T,:Q.00002 •
-3 hO.I a 10 1
t:1.2 x 10-3
,
t::1.e • 10 -3,

87
DIAGRAMAS DO ESFORÇO NORMAL AO LONGO DA HASTE
Massa Dtscr.ta W = 0.00001 1
te 0.4. ,o-3,
t:O.Bal0-31
f:2.1 X 10 -:SI
LO
o.
FIG. 4.9

88
DIAGRAMAS DO ESFORÇO NORMAL AO LONGO DA HASTE
LO
O.&
FIG. 4.10
Ma•a Dttcreta "t,:Q,00002 s
-3 h-0.4 lll 'º 1
-3 t=o.ax10 1
-3 t = 1.2 x 10 1
f:2.1 X 10 -3
1
1: 2.6 a 10·3,

89
DIAGRAMAS 00 ESFORÇO NORMAL AO LONGO DA HASTE 1.
Mana Con1t1tente 'G: 0.00001 ,
o.o -3
f=0.4,: 10 1
o.ol-------------=lf-..-=-------~
1.8
1.0
o.o
o.o
1.8
1.0
o.e
o.o
2.0
2.
2:.oJ==~
LI!
1.0
o.
EI E2
FIG. 4. li a
t:0.1 a 10 -3
•
-3 t=o.exto,

2.
I.S
1.0
o.
o.o
-O.
-1.0
FIG. 4.11 b
90
-3 t:1.1 1t 10 1
-3 t:1.2 110 1
-3 hl.!xlO 1
-3 f:L4xl0 1

9 1
DIAGRAMAS 00 ESFORÇO NORMAL AO LONGO DA HASTE
,.e
FIG. 4.12 a
Mana Discreta W=0.00001 ,
-3 t:o.4xl0 1
f=0.71 IO -!.
-3 t:o.e x 10 ,
f:0.9 1 10 -! a
f:t,0 x 10 -! 1

I.&
'·º
1.0
-O.li
LO
O.&
- 0.!11----=--
-1.0
FIG. 4.12 b
92
-3 t:1.t a 10 •
-3 1::1.2 1 10 1
-3 t:1.3 110 1
-3 hl.4 & 10 1

93
DtAG~AMAS DO ESFORÇO NORMAL AO LONGO DA HASTE
1.e
1.e
1.0
o.•
FIG. 4. 13a
MaHa O..creta ,.,= 0.00002 •
.3 t:Q.4 ll 10 1
f:Q.7 x 10 -3
1
t=o.e x ,o-3,
f:Q.9 1C 10 -3
1
.3 f:1.0 x 10 1

I.&
1.0
1.0
-0.&
1.0
• 1.0
FIG. 4.13b
94
-3 t:1.1110 1
-3 t:1.2 1 10 1
-3 t:1.3 1 10 1
-3 t=IAalO 1

95
EXEMPLO II
Considerou-se o comportamento aio-linear de uma ·vi
ga bi-engastada, estudada na referência [36] e outras, submetida
a uma carga concentrada vertical aplicada subitamente no meio do
vao.
Dada a simetria do problema, apenas a metade da vi
ga e do carregamento foram utilizados.
A discretização espacial foi feita atravês de qua
tro elementos de pórtico plano, de mesmo comprimento, conforme es
quematizado na figura 4.14.
((t) b=I.O ln ~.,_-------------~
e 2 E=O.I x 10 lty'in
)A::0.7971 lb ,r1n4 F( lb l
320~.
o h=o.21n 2 a e
->------ 10 ln ~-----+
FIG. 4.14
Os períodos máximo ~ . e m1n1mo do modelo discreto (fi
gura 4.14) em sua configuração inicial, para os casos de
consistente e massa discreta, levando-se em conta ou nao a
eia de rotação, estao indicados na Tabela 4.1.
massa
inér-

96
.Tf .Tmi'n
S/tn;Rot .. . . -1
0.4983. -4
MASSA 0.1737 .. 10 .. 10 ..
CONSISTENTE .C/In.Rot .. 0.1737 10- 1 0.4983. 10- 4
. S/In.Rot .. .0 .. 1738 . -1 . 0.7590 10- 4 MASSA 10 ..
DISCRETA C/In.Rot.. 0 ... 1738 -1 .0 ... 7 590 10- 4
. . .1.0 .. •,. ..
TABELA 4.1
Dada a pequena influência da inércia de rotaçao so
bre as frequências, nesse problema, ela nao foi
análise que se segue.
considerada na
Adotando-se o intervalo de integração T = 0.00001s
os valores de T/Tf e
estão na tabela 4.2.
T/T . min
MASSA CONSISTENTE
MASSA DISCRETA
Para os dois modelos
T/Tf T/T . min
0.576 10-3 0.201
0.575 10- 3 0.132
TABELA 4.2
discretos
Para se observar o -comportamento da matriz de mas-
sa discreta empregada, eq. (4.16), o deslocamento vertical do no
5 é apresentado na figura 4.15 para os casos de matrizes de massa
consistente e discreta. Empregou-se T = 0.00001s e TIPAN = 3 ,
ou seja, as forças elásticas ao início de um intervalo de tempo
são determinadas a partir da configuração deformada ao final do

97
intervalo anterior.
Usando-se a matriz de .consistente e
T = 0.00001s, a figura 4.16 mostra o deslocamento vertical do no
5 para os casos de TIPAN = 3 e TIPAN = 2 , quando as forças elás-
ticas ~E são calculadas por acumulação da parcela K* bu
-o com o
valor de no inicio do intervalo de integração (vide fluxogr~
ma) .
Os deslocamentos verticais do no 5 ' tomando-se
T = 0.000025s, são práticamente coincidentes com os obtidos com
T = O.OOOOls,impedindo uma representação gráfica clara.
da forma
e ct M onde
Finalmente introduziu-se amortecimento
M é a matriz de massa consistente e a= 200.
O valor de ct adotado corresponde, na análise li-
near, a frações do amortecimento crítico, equação (4.43a), de
!; = 0.276 1 e /;10 = 0.793 10-
3 no primeiro e Último (dêcimo) mo
dos, respectivamente. Os pontos
presentativos da integração dos modos 1 e 10 sao:
pl F; 1 0.276 81 T 0.576 10-3
(Tl Tf) = ... = Tl
plO /; 1 O 0.793 10- 3 8 10
T 0.201 (T 10 T . ) = = TlO m1n
Pela figura 3.3 verifica-se que P1 e estao
na região de con~ergencia e o intervalo de integração escolhido
pode ser usado.
Na análise não-linear a ~ . convergenc.1.a do processo
iterativo estará assegurada enquanto a matriz de iteração, equa -
çao (3.71), variável no tempo, tiver seu raio espectral
pela unidade.
limitado

98
Adotou-se matriz de massa consistente e TIPAN = 3
e o deslocamento vertical do nÕ 5 estâ mostrado na figura 4.17.
.Em todos os casos fez-se TOLl = TOL2 -4 0.1 10 .

DESLOCAMENTO
v9 (tnl
0.9
o.a
0.7
o.e
o.e
0.4
03
0.2
0.1
99
' TRANSVERSAL DO NO 5
Mlaua CoHllttntt
Ma11a Discreta
,.., __ _
' ' ' ' ' ' '
x 10-2$ o ""'---~-----r---~---~---~---~--~
0.1 0.2
V 9
( tn >
0.9
o.a
0.7
o.e
o.e
0'4
03
0.2
0.1
,' ', ' ' ' '
0.3
' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' '
FIG, 4.le
' \ \
.,
0.4 0.15
TIPAN : 3
TIPAN = 2
,'
o.a
' /
0.7
-2 x 10 S o "'-----,----~----~----~----~----~---~
0.1 0.2 o.a 0.4 o.e 0.6 0.7
FIG. 4.16

100
DESLOCAMENTO TRANSVERSAL DO NÓ !5
s' 2 O O M ~
ve (ln)
Q9
o.e
0.7
0.6
o.e
0.4
0.3
0.2
0.1
-2
''º s o 0.2 0.4 0.6 0.8 1.0 1.2 1.4
FIG. 4.17

101
EXEMPLO III
Foi estudada a estrutura de cabos apresentada em
[z] e esquematizada na figura 4.18 submetida
transversal uniforme aplicado subitamente.
a um
Dada a
carregamento
simetria do
problema, analisou-se um octante da estrutura conforme indicado
na figura 4.18.
y
y
X
3 6 'º X
FIG. 4.18
A tabela 4.3 dá as coordenadas dos nos do modelo
discreto bem como a massa concentrada e o carregamento segundo a
direção z , associados a cada um deles.
tabela 4.4.
rentes.
As características dos elementos encontram-se na
Todos os parâmetros estão expressos em unidades coe-

102
N.Õ .X y z .. - _m F z
·1 O.DOO O.DOO o.o 0.6029 10- 2 312.5
.2 200.150 200.150 o.o 0.2408 10- 1 1250.0
3 200.556 0.000 o.o 0.2410 10- 1 1250.0
-. 4 401.050 401.0SO o.o 0.1929 10- 1 1250.0
5 400.299 200.522 o.o 0.4097 10- 1 2500.0
6 401.115 0.000 o.o 0.1989 10- 1 1250.0
7 600.000 600.000 o.o - -8 521.365 399.577 o.o 0.2594 1250.0
9 480.355 199.932 o.o 0.2483 1250.0
10 461.284 0.000 o.o 0.1226 312. 5
TABELA 4.3 - COORDENADAS, MASSAS NODAIS E CARREGAMENTO
ELEMENTO NÕ l NÕ 2 EA TRAÇÃO INICIAL
l 3 2 0.210 10 7 0.1900 10 4
2 6 5 0.210 10 7 0.3093 10 4
3 5 4 0.210 10 7 0.3110 10 4
4 10 9 0.210 10 8 0.1708 10 5
5 9 8 0.210 10 8 0.1734 10 5
6 8 7 0.210 10 8 O. 1821 10 5
7 4 8 0.210 10 7 0.3161 10 4
8 2 5 0.210 10 7 0.1892 10 4
9 5 9 0.210 10 7 0.1868 10 4
10 l 3 O. 105 10 7 0.1605 10 4
11 3 6 0.105 10 7 0.1609 10 4
12 6 10 0.105 10 7 0.1622 10 4
TABELA 4. 4 - CARACTERÍSTICAS DOS ELEMENTOS
O modelo discreto assim definido apresenta,em sua
configuração inicial, um período mâximo Tf = 0.7459s e um perío-
do mínimo T • m1n
-2 = 0.5479 10 s •
O intervalo de integração escolhido foi T
-2 que corresponde a 0.134 10 Tf e 0.1825 Tmin
O.OOls

103
A figura 4.19 apresenta o deslocamento vertical do
no 1 para os dois tipos de análise, T'ÍPAN = 2 e TIPAN = 3
do se utilizam elementos de treliça.
quan-
Na figura 4.20 a mesma comparaçao ê feita, utili -
- -zando-se elementos de cabo que nao atuam em compressao.
A diferença entre as duas soluções ê maior no se-
gundo caso jâ que o procedimento de cálculo das forças elásticas
~E correspondente a TIPAN = 2 introduz erros mais sensíveis sem-
pre que algum elemento deixar de ser tracionado. Quando isto ocor
re a matriz de rigidez do elemento nao contribui para a rigidez
da estrutura. Por outro lado a acumulação do produto K* /iu -o
ao
vetor !_lE no início do intervalo faz com que os elementos nao
tracionados continuem contribuindo para o vetor global !_lE
Finalmente na figura 4.21 o deslocamento vertical
do nÕ 1 ê apresentado para os modelos obtidos com elementos de tre
liça e cabo, utilizando-se o cálculo mais preciso (TIPAN = 3) das
forças elásticas ~E
O comportamento dos modelos ê idêntico atê que se
desenvolva compressão em algum elemento. A partir daí o elemento
de cabo fornece uma aproximação mais realista, desde que se use o
procedimento correspondente a TIPAN = 3
Adotou-se em todos os casos TOLl TOL2 -4
0.1 10 .

104
DESLOCAMENTO TRANSVERSAL DO NO
200 •,
Elem•nto1 de Treliça
180
160
140
120
100
80
60
40
20
o 0.1 02 0.3 0.4
FIG. 4.19
20 O •, Elementos de Cabo
180 ,, ' ' 1 ' 160 1 ' I ' ' 1
140 ' 1 I ' 1 ' I ' 120 1 ' ' ' ' 'J ' ' '
100
' 1
' 1 1 80 ' ' 1
' ' ' 1
1
60 1
' ' 1 1
40 1 1 1
' ' 20 I
' ~
o 0.1 o.2 o.a 0.4
_ 20 FIG. 4.20
0.5
' I
' ' ' ' 1
' ' ' t·.J 1
' ' ' ' '
1
' ' ' ' ' 1' 1' V
0.5
---- TIPAN = 2
-TlPAN=3
' . ' ,_,
0.6
,. '' ' '
' ' ' \,
---- TI PAN
--TIPAN
,''\
' ' '
= 2
= 3
' ' ' ' ' ',, I '·' 1
' 1
' ' 1
' ' 1 1
' ' ' ' ' 0.6
,,
T (s) 0.7
T (s)
0.7
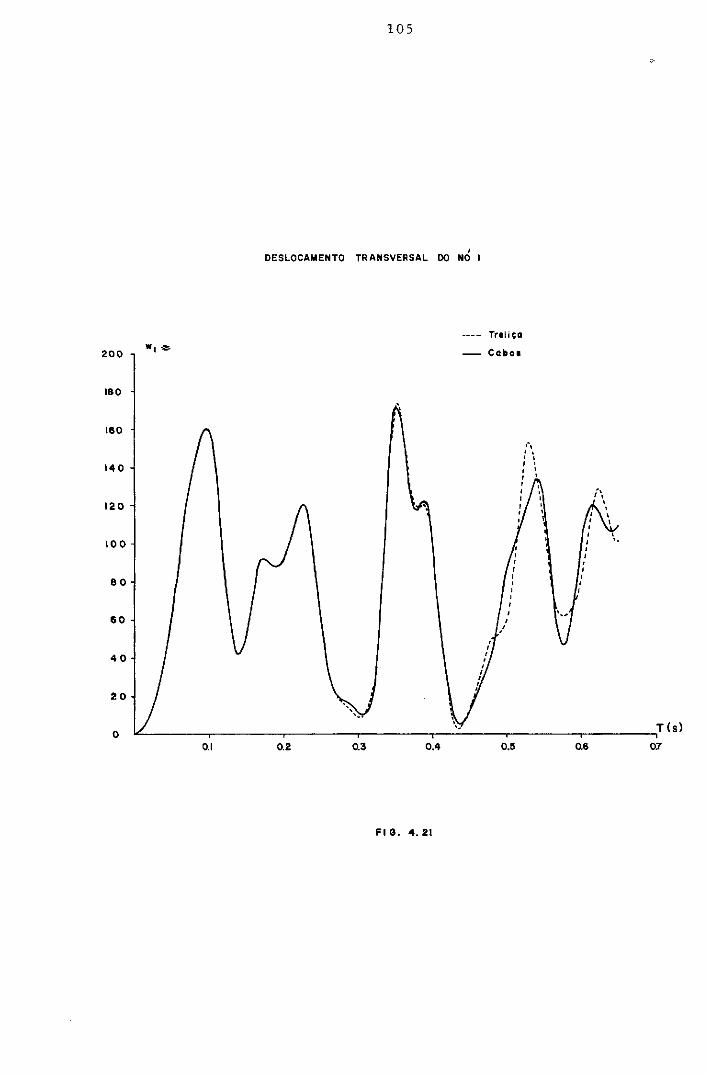
105
' DESLOCAMENTO TRANSVERSAL DO NO
200 w,e
180
1&0
140
120
100
80
60
40
20
' ' -o
0.1 0.2 0.3 0.4
FIG. 4. 21
Treliça
Calo,
' ' '
' /
' ' ' ' ' ' ' ' '
0.15
,·, ' ' 1
,.,
' ' '
0.6
' '·
T (s)
07

106
EXEMPLO IV
A fim de se analisar um problema de .carga mÕvel
[40, 41, 42, 43, 44], não levando em conta a inércia do carrega -
mento [43, 45], mas considerando a não-linearidade geométrica, to
mou-se a viga bi-engastada estudada no ~xemplo II.
A discretização espacial foi feita por meio de 4
elementos de pÕrtico plano de igual comprimento, conforme indica-
do na figura 4.22, e usou-se a matriz de massa consistente.
fundamental
2 3
20 ln
FIG. 4. 22
4
O modelo discreto assim obtido apresenta o período
Tf = 0.01735s e o período ~ . m1.n1mo T. = 0.9965 m1n·-
-4 10 s,
não tendo sido considerada a inércia de rotaçao.
A carga mÕvel, de 500 ib, percorreu a viga com ve-
locidade constante definida pelo parâmetro a= T /T f trav. onde
T e o tempo gasto pela carga para atravessar toda a trav ext ens ao
da viga.
A tabela 4.5 indica os valores de a adotados, os
tempos de travessia e as velocidades da carga (in/s) corresponde~
tes.

107
.a. T trav .V
2.0 0.008675 2305.4735
1. 5 0.011567 1729.1066
1. o 0.01735 1152. 7377
·º· . .5. 0.034.70 .5.7.6. 36.89
TABELA 4.5 - TEMPOS DE TRAVESSIA E VELOCIDADES
O intervalo de integração usado foi -4 T = 0.2313 10 S
correspondente a 0.133 10- 2 Tf e 0.232 T . min
Os resultados da análise linear estao na figura
4.23 que fornece, em ordenadas, o deslocamento vertical do no cen
tral e, em abcissas, o tempo dividido pelo tempo de travessia cor
respondente ao valor de a. adotado.
Os resultados da anãlise não-linear, através do
procedimento correspondente a TIPAN = 2, encontram-se na figura
4.24.
Observa~se que o deslocamento miximo se deu para
a.= 2.0 que corresponde a uma velocidade maior do que aquela que
dão mãximo no caso linear (a.= 1.0)
Adotou-se neste exemplo TOLl = TOL2 -5 0.1 10 .

108
' DESLOCAMENTO VERTICAL 00 NO 3
v3 <1•1 c,l.:1,0
Resposta Ltneor
5.0-l
i 4.0j
' 3.0
2.
1.0
o.o T
T tra V.
-1.0
-ll.Oj
FIG. 4.23
V (ln) Resposta Não-Lrn•or 3
0.8 c,l.:1.5
0.6
0.4
0.2
T o.o
-0.2
-0.4
-o.e FIG. 4.24

109
4. 9 - CONCLUSÕES
O operador de integração discutido, em conjunto
com o método dos elementos finitos, constituem ferramenta
de tratar o problema da resposta dinâmica de estruturas.
capaz
No domínio linear o algorítmo implementado nao
parece ser, no caso geral, competitivo, do ponto de vista de tem
po de processamento, por ser iterativo e ter o intervalo de inte~
gração limitado pela condição de convergência desse processo ite
rativo, fig. 3.2.
O algoritmo modificado, incondicionalmente está
vel, permite intervalos de integração arbitrários porem envolve a
solução direta de um sistema não-simétrico, de ordem 2n, em cada
. intervalo. Embora preciso, tal esquema ainda não foi aplicado a
problemas medias e grandes.
No domínio não-linear, o uso da matriz K* -o per-
mite, em geral, o calculo das forças elásticas por acumulação. Em
alguns casos, entretanto, como estruturas de cabos em que algum
elemento deixa de ser tracionado, o calculo das forças
devera ser feito a partir da configuração deformada.
elásticas
O uso da matriz tangente modificada K* -o e das
expressoes (3.64) fornecem, para os intervalos usualmente empreg~
dos [47], uma boa aproximaçao.
Em ambos os domínios, a maior eficiência dos al
goritmos se dá em problemas de transientes curtos em que a contri
buição dos modos mais altos ê significativa, larguras de banda re
lativamente grandes e onde o uso de matriz de massa diagonal tor-
na trivial a solução do sistema de equações, independentemente da
forma da matriz de amortecimento adotada.

110
A convergencia do processo iterativo e definida,
para o caso de amortecimento proporcional, pelas figuras 3.2 e
3. 3. Esses gráficos possibilitam uma aproximação para o caso de
amortecimento não-proporcional sendo Úteis também em problemas
nao lineares, onde a matriz ·de iteraçio e seccionalmente constan-
te.
A introdução de amortecimento dificulta a conver
gencia do processo iterativo sendo, por vezes, necessário usar um
intervalo de integração menor do que aquele do problema sem amor-
te cimento. Trata-se de uma característica inerente ao processo
iterativo de resolução e não ao algorítmo de integraçao em si.
A discretização espacial devera ser cuidad6sa,
evitando um refinamento desnecessário que daria origem a uma fre
quência de corte elevada e, consequentemente, um intervalo de in
tegraçao muito pequeno, onerando a solução.
~ interessante se ter pelo menos uma estimativa
do período mínimo do modelo discreto para, com auxílio das figu-
ras 3.2 e 3.3, se fazer a escolha do intervalo de integraçao.
Na sua regiao de utilização, em termos de inter
valos de integração, e para os problemas analisados aqui e em ~71, o algoritmo não se mostrou muito sensível a variaçoes no interva-
lo de integraçao.
O uso da matriz tangente K -o
em problemas nao-
lineares é uma alternativa que merece ser analisada no que diz· res
peito ã precisao e tempo de processamento.
A pesquisa de técnicas numéricas mais eficientes,
para fazer frente a novas necessidades, continua e é atestada pe
lo grande volume de trabalhos na área.
111
BIBLIOGRAFIA
1 ARGYRIS, J.H. and eHAN, A.S.L. - Applications of Finite Ele-
ments in Space and Time - Ingenieur - Archiv 41, 235-
257, 1972.
2 ARGYRI S, J. H. ; DUNNE, P. e. and ANGELOPOULOS, T. - Non-Line-
3
ar Oscillations Using the Finite Element Technique - eo~
puter Methods in Apllied Mechanics and Engineering,Vol.
2, 203-250, 1973.
ARGYRIS, J.H.; DUNNE, P.e. and ANGELOPOULOS, T. - Dynamic
Response by Large Step Integration - Earthquake Engineer
ing and Structural Dynamics, Vol. 2, 185-203, 1973.
4 GELFAND, I.M. and FOMIN, S.V. - Calculus df Váriations
Prentice-Hall, Inc., 1963.
5 MEIROVITCH, L. - Analytical Methods 1n Vibrations - The Mac-
Millan eompany, 1967.
6 LOULA, A.F.D. e GALEÃO, A.e. - Vibração de Sistemas Elásti-
cos Lineares - PDD 3/76, eOPPE/UFRJ, 1976.
7 BREBBIA, e.A. and FERRANTE, A.J. (Editors) - The Finite Ele-
ment Technique - Editora da UFRGS, 1975.
8 FEIJOO, R.A. - Aplicacion del Metodo de Ritz a Funcionales
Relajados en Mecanica de los Solides
eOPPE/UFRJ, 1973. Tese de M.Sc.,
9 eLOUGH; R.W. - Analysis of Structural Vibrations and Dynamic
Response - Recent Advances in Matrix Methocls of Structu
ral Analysis and Design - U.S.-Japan Seminar, Univ. of Alabama Press, 441-486, 1969.
10 NieKEL, R.E. - Direct Integration Methods 1n Structural Dy
namics - ASeE, Vol. 99, No. EM2, 303-317, April, 1973.
11 DUNHAM, R.S.; NieKELL, R.E. and STieKLER, D.e. - Integration
Operators for Transient Structural Response - eomputer
& Structures, Vol. 2, 1-15, 1972.
12 eLOUGH, R.W. and MOJTAHEDI, S. - Earthquake Response Analy
sis Considering Non-Proportional Damping Earthquake
Engineering and Structural Dynamics, Vol. 4, 489-496, 1976.

112
13 NICKELL, R.E. - Nonlinear Dynamics by Mode Superposition
Computer Methods in Applied Mechanics and Engineering,
7, 107-129, 1976.
14 BATHE, K.J. and WILSON, E.L. - Numerical Methods in Finite
Element Analysis - Prentice-Hall, 1976.
15 CLOUGH, R.W: and PENZIEN, J. - Dynamics of Structures
Graw-Hill Inc., 1975. Me
16 GUIMARÃES, S.S. - Análise da Estabilidade de Métodos de Inte
graçio Passo a Passo - Tese de M.Sc., COPPE/UFRJ, 1977.
17 NICKELL, R.E. - On the .Stability of AppI'.oximation Operators in
Problems of Structural Dynamics - International Journal
of Solids and Structures, Vol. 7, 301-319, 1971.
18 BATHE, K.J. and WILSON, E.L. - Stability and Accuracy Analy
sis of Direct Integration Methods - Earthquake Enginee~
ing and Structural Dynamics, Vol. l, No. 3, 283-291,1973.
19 GOUDREAU, G.L. and TAYLOR, R.L. - Evaluation of Numerical Me
thods in Elastodynamics - Computer Methods in Applied
Mechanics and Engineering, Vol. 3, 69-97, 1972.
20 HILBER, H.M.; HUGHES, T.J.R. and TAYLOR, R.L. - Improved Nu
merical Dissipation for Time Integration Algorithms in
Structural Dynamics - Earthquake Engineering and Struc
tural Dynamics, Vol. 5, 283-292, 1977.
21 KEY, S.W. and BEISINGER, Z.E. - The Transient Dynamic Analy
sis of Thin Shells by the Finite Element Method - 479-
518, Proceedings of the Third Conference on Matrix Me
thods in Structural Mechanics, Wright-Paterson Air Force Base, Ohio, 1971.
22 HINTON, E.; ROCK, T.A. and ZIENKIEWICZ, o.e. - A Note on Mass
Lumping and Related Processes in the Finite Element Me
thod - Earthquake Engineering and Structural Dynamics, Vol. 4, 245-249, 1976.
23 ODEN, J.T.; KEY, J.E. and FOST, R.B. - A Note on the Analysis of Nonlinear Dynamics of Elastic Membranes by the
Finite Element Method - Computers & Structures Vol. 4, 445-452, 1974.

113
24 SHANTARAM, D.; OWEN, D.R.J. and ZIENKIEWICZ, o.e. - Dynamic Transient Behaviour of Two and Three-Dimensional Structures In
cluding Plasticity, Large Deformation Effects and Fluid
Interaction - Earthquake Engineering and Structural Dy
namics, Vol. 4, 561-578, 1976.
25 NEWMARK, N.M. - A Method of Computation for Structural Dyna
mics - ASCE, Vol. 85, No. EM3, 67~94, 1959.
26 NAGARAJAN, S. and POPOV, E.P. - Elastic-Plastic Dynamic Ana
lysis of Axisymmetric Solids - Computers & Structures,
Vol. 4, 1117-1134, 1974.
27 WILSON, E.L.; FARHOOMAND, I. and BATHE, K.J. - Nonlinear Dy
namic Analysis of Complex Structures - Earthquake Engi
neering and Structural Dynamics, Vol. l, 241-252, 1973.
28 McNAMARA, J.F. and MARCAL, P.V. - Incremental Stiffness Me
thuds for Finite Element Analysis of the Nonlinear Dyna
mic Problem - Numerical and Computer Methods in Structu
ral Dynamics, 353-376, Symposium held at Urbana, Illi
nois, Sept. 1971.
29 ARCHER, J.S. - Consistent Mass Matrix for Distributéd
Systems - ASCE, Vol. 85, No. ST4, 161-178, 1963.
Mass
30 EBNER, A.M. and UCCIFERRO, J.J. - A Theoretical and Numeri
cal Comparison of Elastic Nonlinear Finite Element Me
thods - Computers & Structures, Vol. 2, 1043-1061, 1972.
31 WILSON, E.L. and PENZIEN, J. - Evaluation of Orthogonal DamE
ing Matrices - International Journal for Numerical Me
thods in Engineering, Vol. 4,, No. 1, 5-10, 1972.
32 JONES, A.T. and GRANT, J.E. - Generation and Properties of
Banded Viscous Damping Matrices - Computers & Structures, Vol. 3, 1037-1051, 1973.
33 THOMSON, W.T.; CALKINS, T. and CARAVANI, P. A Numerical Study of Damping - Earthquake Engineering and Structural Dynamics, Vol. 3, 97-103, 1974.
34 BERGAN, P.G. and CLOUGH, R.W. - Convergence Criteria for !te
rative Processes - A.I.A.A. Journal, Vol. 10,
1107-1108, 1972.
No. 8,

35
114
TONG, P.; PIAN, T.H.H. and BUCCIARELLI, L.L. - Mede Shapes
and Frequencies by Finite Element Method Using Consistent
and Lumped Masses - Computers & Structures, Vol. l, 623
638, 1971.
36 WEEKS, G. - Temporal Operators for Nonlinear Structural Dyna
mies Problems - ASCE, EM~5, 1087-1104, October, 1972.
37 FERRANTE, A.J. - Notas de Aula de Mecânica das Estruturas II
- COPPE/UFRJ, 1975.
38 PRATES DE LIMA, E.C. - LORANE DINA - Uma
para Análise Dinâmica de Estruturas
COPPE/UFRJ, 1977.
Linguagem Orientada
Tese de D.Se.,
39 EBECKEN, N.F.F. - LORANE-NL - Uma Linguagem Orientada à Aná
lise Estrutural Não-Linear - Tese de D.Se. - COPPE/UFRJ,
1977.
40 VENÂNCIO FILHO, F. - Dynamic Influence Lines of Beams and Frames - ASCE, No. 92, ST-2, 371-386, April, 1966.
41 BRUCH, Y.A. - Análise Dinâmica de Placas pelo Método dos Ele mentes Finitos - Tese de M.Sc. - COPPE/UFRJ, 1973.
42 JUN"G, M.P. - Dinâmica de Estruturas Reticuladas sob Cargas
Móveis pelo Método dos Elementos Finitos - Tese de M.Sc.
- COPPE/UFRJ, 1973.
43 FALABELLA, J.E. - Resposta Dinâmica de Estruturas Reticula
das a Cargas Móveis pelo Método dos Elementos Finitos -Tese de M.Sc. - COPPE/UFRJ, 1975.
44 MIANA, P.R. - Análise Dinâmica de Vigas de Pontes pelo Método dos Elementos Finitos - Aplicação a Vigas Gerber Tese de M.Sc. - COPPE/UFRJ, 1975.
45 GUERREIRO, J.N.C. - Dinâmica de Estruturas Prismáticas Laminares - Consideração de Cargas Móveis - Tese de M.Sc. -COPPE/UFRJ, 1977.
46
47
ALBRECHT, P. - Análise Numérica: Um Curso Moderno
Técnicos e Científicos Editora S.A. - Rio, 1973.
Livros
CORREA BARBOSA, H.J.; MAIA DA COSTA, A.; EBECKEN, N.F.F. e
VENÂNCIO FILHO, F. - Métodos de Integração Direta para a Análise Dinâmica Não-Linear - ·XIX Jornadas Sudamerica
nas de Ingenieria Estructural, Santiago, Chile, 1978. A ser pu
blicado.

115
APllNDICE
a) CARACTERÍSTICAS GERAIS DO PROGRAMA
O programa, desenvolvido em FORTRAN IV, segue o
fluxograma mostrado no item IV.7 e os procedimentos relativos a
montagem de matrizes globais e introdução de condições de contor
no foram baseados no fluxograma apresentado em [37]
As condições de contorno incluem o caso de apoios
inclinados com relação ao referencial global. Todas as
são levadas em conta na integração ao longo do tempo,
aquelas correspondentes às direções impedidas.
As condições iniciais são supostas nulas:
equaçoes
inclusive
u (O) =
= ;,_(O) = O Entretanto, condições mais gerais poderão ser incor
paradas sem maiores dificuldades.
As características dos elementos implantados enco~
tram-se nos itens IV.2 e IV.3 salientando-se que foram despreza
das a deformação por corte e a variação da seçao transversal e
que as deformações sao supostas pequenas.
O vetor de solicitações é montado automaticamente,
para o caso de carga mõvel, conforme indicado no item IV.5. Pro-
cedimentos mais gerais para esta montagem, como os empregados no
sistema LORANE [38, 39], podem ser implementados, de acordo com
as necessidades do usuârio.
b) SUBROTINAS EMPREGADAS
1 - Subrotina DADOS
Lê e imprime todos os dados de entrada do programa.
Calcula e imprime a largura de banda e o com~rimento
de cada elemento.
inicial

116
2 - Subrotina ROT
Forma a matriz de rotaçao de ordem (3x3) que e usada para a
introdução de apoios inclinados e mudança de referenciais (lo
cal e global).
3 - Subrotina ROTM
Transforma as matrizes do elemento (6x6) do referencial local
para o referencial global a partir da matriz de rotação obti
da pela subrotina ROT.
4 - Subrotina MULTV
Efetua a multiplicação de urna matriz
um vetor.
A de ordem (NlxN2) por
Caso o parametro ITRANS seja diferente de zero e a matriz A
seja quadrada, serã obtido o produto de AT pelo mesmo vetor.
5 - Subrotina MULTM
Efetua o produto matricial
tangulares e conformes.
6 - Subrotina SACAP e BOTAP
c A B onde as matrizes sao re-
São subrotinas auxiliares para retirar e colocar, respectiva
mente, vetores, correspondentes a um nó particular, em um ve
tor global da estrutura [37]
7 - Subrotina SACA e BOTA
São subrotinas auxiliares para retirar e colocar, respectiva
mente, uma submatriz de uma matriz global da estrutura [37]
8 - Subrotina MONTA
Forma as matrizes globais de massa e ·rigidez da estrutura com
a semi-banda armazenada em forma unidimensional [37].

117
9 - Subrotina EXCITA
E uma subrotina,construÍda para cada caso particular,que for
ma os vetores globais de e~citação da estrutura, "F", e sua
derivada em relação ao tempo "D.F "
10 - Subrotina APOIO
Introduz as condições de contorno, do tipo deslocamento pre~
crito nulo, segundo eixos que podem ser inclinados em rela
ção ao referencial global [37]
11 - Subrotina TRIANG
Triangulariza uma matriz quadrada simétrica com sua semi-ban
da armazenada em forma de vetor.
12 - Subrotina RESOB
Resolve o sistema de equaçoes lineares, apos a triangulariz~
ção da matriz dos coeficientes pela subrotina TRIANG, para
vários vetores independentes armazenados sequencialmente.
13 - Subrotina RESOD
Resolve diretamente o sistema de equaçoes lineares
trivial em que a matriz dos coeficientes ê diagonal.
14 - Subrotina GLOBAL
no caso
Transforma os deslocamentos, referidos ao sistema local, de
um apoio inclinado para o referencial global.
15 - Subrotina MULTB
Efetua o produto de uma matriz quadrada simétrica, com sua
semi-banda armazenada em forma unidimensional, por um vetor.

118
16 - Subrotina CONV
Verifica se o critêrio de convergência adotado jâ foi satis
feito.
Vide item IV.6.
17 - Subrotina MASSP
Forma a matriz de massa (consistente ou diagonal) do elemen-
to de pórtico plano no referencial local e transforma
subrotinas ROT e ROTM) para o referencial global.
18 - Subrotina MASSC
(via
O mesmo que a subrotina MASSP para os elementos de treliça e
cabo,planos ou espaciais.
19 ~ Subrotina RIGEP
Forma a matriz de rigidez usual, linear, e a matriz geomêtri
capara o elemento de pórtico plano, no referencial local, e
transforma para o referencial global.
Calcula o vetor de forças elásticas nodais no referencial lo
cal.
No caso de TIPAN = 3, o vetor global de forças elásticas e
montado por acumulação das contribuições dos elementos.
20 - Subrotina RIGEC
O mesmo que a subrotina RIGEP para os elementos de treliça e
cabo, planos ou espaciais.
21 - Subrotina SAIDA
Imprime os deslocamentos, velocidades e acelerações dos nos
selecionados e os esforços nos nÕs dos elementos
dos, nos intervalos de tempo especificados.
seleciona-

119
22 - Subrotina ESFLIN
Calcula e imprime, para cada el·emento selecionado, os esfor
ços seccionais nos nôs no caso de análise linear~
c) MANUAL DE ENTRADA DO PROGRAMA
N9 DE N9 DE VARIÁVEIS FORMATO ORDEM CARTÕES
1 1 NNOS,NELEM,NAP,NNED,TIPAN,ESTAB,CARREG,MASSA 815
2 l INROT,IAMOR,ALFA,BETA,TOL1,TOL2,TF,TAU,IMPRES 2I5, 6Fl0.0, IS
3 1 PV, VI, A, NEP 3Fl0.0, IS
4 NNOS I, X(I), Y(I), Z (I), IMPDVA(I) IS, 3Fl0 . O, IS
5 NELEM I,ITIPO(I),CONEC(I,l),CONEC(I,2),E(I),MESP(I),
AX(I), IZ(I), FZERO(I), IMPFOR(I) 4IS, SFlO.O, IS
6 NNED NO(I), (ED(I,J), J = 1,9) IS, 9F8.0
7 NAP (MCC(I,J), J = 1,5), (RLOCAL(I, J), J = 1,9) SIS, 9F6.0
8 IT ~ 8 C (I) I = 1, IT IT = NNOS * NGLN * LBNOS * NGLN 8Fl0.0
DEFINIÇÕES E COMENTÁRIOS
1 - NNOS - N9 de nos da estrutura
NELEM - N9 de elementos
NAP - N9 de nos com alguma direção impedida
NNED - N9 de nos com algum elemento discreto
TIPAN - Indica o tipo de análise a ser efetuado:
TIPAN = 1 - Análise linear
TIPAN = 2 - Análise não linear onde o vetor de forças
elásticas ao final do intervalo de inte -
gração e calculado por acumulação de
K* 6u_ .. -o

120
TIPAN = 3 - Análise nao linear onde o vetor de forças
elásticas ao final do intervalo de inte -
gração e calculado a partir da configura
ção deformada.
ESTAB - Indica os coeficientes da expressão dos deslocamentos
(3.45b) ou (3.56b).
ESTAB = O - São usados os coeficienies correspondeu-
tes ao algoritmo condicionalmente estável
ESTAB
(3.45b).
1 - são.usados os coeficientes correspondeu-
tes ao algoritmo incondicionalmente está
vel (3.56b).
Como ê usado o processo
ESTAB = O [2]
iterativo deve-se adotar
CARREG - Igual a 1, indica carregamento qualquer definido pela
subrotina EXCITA.
Igual a 2 para o caso de carga móvel como definida em
IV. 5
MASSA - Controla a montagem da matriz de massa. Vide item
IV. 2. 1.
2 - INROT - Controla a inclusão do efeito de inercia de rotaçao
!AMOR,
ALFA
na matriz de massa. Vide Ítem IV.2.1.
BETA - Parâmetros que controlam a construçao da matriz de
TOLl,
TOL2
amortecimento. Vide Ítem IV.4.
Tolerâncias para os testes de convergencia respecti~~
mente do vetor de deslocamentos e do vetor de deriva-
das das forças de inercia.

121
TF - Tempo atê o qual se quer a resposta da estrutura.
TAU - Intervalo de integração
IMPRES - Intervalo de impressão dos resultados
3 - PV - Valor da carga móvel concentrada vertical
VI - Velocidade inicial da carga móvel
A - Aceleração constante da carga móvel
NEP N9 total de elementos percorridos pela carga
No caso de CARREG = 1 este cartao e deixado em branco.
4 - I - Número do no
X( I),
y ( I) ,
z ( I) - Coordenadas do no I. Para estruturas planas, Z = O.
IMPDVA(I)- Deve ser feito igual a 1 quando ·se deseja imprimir
o deslocamento, velocidade e aceleração do nó I.
5 - I - Número do elemento
ITIPO(I) - Tipo do elemento I. Vide Ítem IV.2.
CONEC(I, 1)
CONEC(I,2)-NÚmero dos nos 1 e 2 do elemento I .
E(I),
MESP(I) - Módulo de Young e massa específica do elemento I.
AX ( I) ,
IZ(l) Ãrea e momento de inércia da seçao transversal do elemento I.
FZERO(I) - Esforço normal inicial no elemento I, positivo se for de traçao.
H1PFOR(.I)- Deve ser feito igual a l quando se deseja imprimir
os esforços no elemento I
6 - Cartões fornecidos apenas no caso de NNED > 1
NO (1) Número do nÕ com elemento discreto
ED(I,J) - Matriz das constantes dos elementos discretos. Vide
IV. 3.

7 - MCC(I,J)
122
- Matriz de condições de contorno
MCC(I,l) - Numero do no com restrição
MCC(I,2) - Quando igual a 1 indica restrição na
direção 1
MCC(I,3) - Quando igual a 1 indica restrição na
direção 2
MCC(I,4) - Quando igual a 1 indica restrição na
direção 3
Quando a direção ê livre o valor for
necido deve ser zero.
MCC(I,5) - Quando diferente de zero indica que
as direções acima não são globais e
os deslocamentos locais
são relacionados por
do a matriz de rotação
em RLOCAL.
~L R
e globais
= R ~G s en
contida
RLOCAL(I,J) - Contêm na linha I os elementos da matriz de ro-
tação do apoio inclinado
do suas linhas.
MCC(I,l) dados segun-
Se MCC(I,5) =O, nao sao fornecidos.
8 - Cartões fornecidos apenas no caso de !AMOR 3
C(I) - Matriz de amortecimento lida conforme item IV.4
d) DIMENSIONAMENTO
O programa listado aqui estâ dimensionado da seguinte
maneira:
- n'? de nos - 100
- n'? de elementos - 100
n'? de ·-nos com apoio 20
- n'? de nos com elementos discretos - 50

123
Os vetores que armazenam os elementos da semi-ban
da superior das matrizes gleba.is de massa, amortecimento e rigi
dez, estão dimensionados para:
(NNOS * NGLN) * (LBNOS * NGLN) < 10.000
onde:
NNOS - N9 de nos
NGLN - N9 de graus de liberdade por no, no caso, igual a 3 .
LBNOS - Largura de banda em nôs
e) LISTAGEM

124
SUBROUTINE DADOSCNO,ED 1 MCC,RLOCALl INTEGER CONEC,TIPAN,ESTAS,CARREG REAL MESP,IZ,Ml,M2,KMOLA,LZERO COMMON /GERAL/lR,I",IT 1 NNE,NGLN,NNOS,NELEM,NAP1NNEO,LBNOS,
•TIPAN,ESTAB,INROT,MASSA,IAMOR,ALFA,8ETA,TOLl,TOL2,TF,TAU, •lMPRfS,CARREG
COMMON /PROP/AX(IOO),MESP(IOOJ,CONEC(I00,2),X(IOOJ,YCIOO), *Z(IOO),E(IOOl,IZCIOOJ,ITIPOCIOOl,LZER0(100)1XZERO(l00)1 -*YZEROC!OO),ZZERO(IOO),ANGZC!OOl,FZERO(!OO)
COMMON /IMPRE/IMPSl,lMPOVA(lOO),lMPS2,IMPFOR(IOO) COMMON /MOVEL/ PV,VI,A 1 NEP - . -DlMENSION NO(SO),EDCSO,q),MCCC20,S),RLOCAL(20,qJ ~RITECIW,qOO) .
900 FQRMAT(//,20X,t•UM ALGQRJ~MQ DE ORDEM 5UPERIOR PARA A INTE' •,'GRACAO DIRETA DAS EGUACOES DA DINAMICA ESTRUTUR•L•'l/,lOi •, 1 TESE DE MESTRA00',12X,'HELI0 JOSE CORREA BARB0SA',i2X, . •'COPPE/UFRJ' 1 1/) . .
RE•D(IR,IOO)NNOS,NE.LEM1NAP,NNEO,TIPAN1ESTAB,CiRREG1MASSA 100 FQRMAT(BIS)
WRITE(X~,101)NNOS,NELEM 1 NAP,NNED,TIPAN,ESTA6,CARREG,MASSA !OI FORM,q (/1IOX1 1NNQS! ,SX, INELEMI ,SX, INAPt ,SX, INNE.Q! ,SX, 'TIPAI
• , 1 N 1 , s X, ' E s TA a t , s X' ! e ARRE G 1 , 5 X, ! MA s 5 A ' , / /, 1 o X 1 4 ( Í LI, s X ) , l :s 1 . •9X,l1,1ox,r1,qx,11l
READ(IR,200JINROT1ÍAMOR,ALFA1BETA,TOL1 1 TOL2,TF1TAU1lMPRES 200 FORMAT(2I5,bf10,0,IS)
IFC INROT ,NE, O l INROT:\ xrc I•MoR ,LT, 1 ,oR, IAMQR ,GT, l l lAMoR=t
WRITE(IW,20!)INROT 1 1AMOR,ALFA 1 BETA 1 T0Lt,TOL2,TF 1 TAU,IMPRES 2 O 1 f DR MA T ( / /; I O)(, ' I NR O T ' , S X 1 1 I AMOR 1 , 5 )( 1
1 .A 1.. F A I t \ O X Í ' 6E TA ' , 1 O X, * 'T OL 1 1 , 1 O X 1 1 T OI,. 2 1 , 1 1 X, 1 T F 1 , 1 l X, ! TA Ú t I b X, t X MP RE S t , / ! 1 12 XI II 1 •9X1ll1b(4X,E10,Ll),2X1Ill
READ(IR,300)PV,Yl,A,NEP 300 FORMAT(3f10,0,I5)
IF( CARREG ,EQ, 2 ) WRITE(IW,JO!l PV,VI,A,NEP 30! FoRMÁ,TC/1,lOX,tC AR G A MO V E L',11,tBX,'PV',lBX,IVJ! *, I q X 1 ! A 1 , 1 2 X, ! NE P 1 , / /, 1 O X, 3 ( F 1 5, 4, S X ) ,IS) . . . .
READ(IR,QOO)(I,X(Il,Y(Il,Z(I),IMPDVACIJ,K=t,NNOS) aoO FORMAT(l5,3F10 1 0,I5J . . -
NRITE(lW,401lCI,X(ll,Y(l),z(I),IMPDVA(Il,I=l,NNOSl 401 FoRMAT(l/,10X, 1 C O ORDENA D AS NO D l I S',ll,11X
•,'I',BX, IX(I) 1 ,IOX, 'Y(IJ 1 ,IDX, 1 Z(l)',1tX,1IMPDiA(I)',II, . ~c1ox,13,ax,,10,a,ax,F10,a,ux 1 F10;a;12x,11)l ·
READCIR,500)CI,ITJPO(t),CONECCI,i),CONEC(I,2)1ECil,MESP(l), *AX(l),IZ(I),FZERO(IJ 1 IMPFOR(l),K=l,NELEMj -
soa FORMAT{•IS,SFIO,O,I5) -Ll>NOS:O JFIM=NNE•1 lMP52::o DO 14 I=l,NELEM

125
IMPS2=IMPS2+IMPFORCI) 00 13 J=l,JFtM . !<IN=J+l DO 12 K::KIN,.NNE L=IASS(CONECCI,Jl~CONEC(I,!<)) IF(L6NOS~Lll!,12,12
11 LBNOS=L 12 CONTINUE \3 cuuru,uE liJ CG•illNU~
t6r-J()S:;,.t;N05-+' 1 IMPs1::u DO JS I=!,NNOS lMPSl=IMPSl+IMPOVACI) XZEROCl)=XCI) YZERO(Il=YCil
15 ZZERO(I)~Z(l) DO 1ó I=!,NELEM DX:X(CONEC(I,2))~xccoNEC(J,1ll DV~Y(CONECCI,2))•Y\CONEC(I,ll) DZ=Z(CONEC(I 1 2)l•ZCCONEC(I,!)) LZERO(t):SQRTCON~Dk+DV•OVtDZ~OZ) IFCTIPAN ,GT, !l LZEROCtl=LZERO(Il/C!,+FZERO(I)IAX(t)IE(Il) ~NGZCI)=ATAN2COV,OX) . . . -
16 CONTINUE WRITE(IW,SO!)CI,lTlPO(ll,CONEC(J,ll,CONEC(I,2),E(I),MESPCIJ
"• A.X(IJ I tZ(J) ,FZERO( I J 1 1.ZERO(Í) 1 ANGZ ( I)-,IMPFQR(I) 1 I.:1,NELéMl 501 fORMAT(//,lOX,'C A.R AC TER l S TI C A 5 D OS Ei
*,'LEME N TO S!,//,aX,'I ITIPOCI) NO l NO 2',óXIE(i *,'I)',gX,•MESP(l) 1 18X1 'AX(I) 1 ,QX,'IZCI) 1 17X, 1fZEROCI)'ibX,. ~ 11. ;z E RO ( I l 1 , 7 X, 1 A NG Z (I ) ! , 3 X, ' l M PI' OR ' 1 / I 1 ( 3 X, I l, 3 X, I 2, ó X, I 3 1
•4X,l3,7C4X 1 EI0,4),qX,I1)) IF(NNEDl2,2, 1
1 READ(IR,óOO)(NO(I),(ED(J,JJ,J:1,Q),I.:t,NNED) 600 fORMAT(I5,qfa,Ol
WRITE(IW,b01lCNO(Il,(ED(I1Jl1J=t,Ql,I=1,NNEOl bOl FORMAT(l/,IOX,'E L.E ME N TOS . DISCRETO SI,//,
.. 4 X' 1 NO ' ' 8 )( 1 1 M 1 ! ' 1 2 X, ! M 2 1 , 12 X 1 1 M 3 1 , 12 X' ! e 1 1 , 12 X 1 1 e: 2 1 ' 12 X 1 'e ' f! 1 1 3 ' 1 12 X, ! K I ' , ! 2 X, li( 2 1 1 ! 2 ~, 1 K 3 1 , / / t C 3 X, I 3, 'H l! XI E I O~ ti ) l l . .
2 Rf.AP(IR,700)((MCCC!,J),J;!,S),(RLOCALCI,J),J.:t,q),I:t,NAP) 700 FORMAT(5!5 1 QFb,O) . . . -
WRITE(JW,70l)((MCC(I,J),J;\,Sl,(R~ocAL(I,J),J=1,q),I=l1NAP) 701 FORMAT(//,IOX,'C O N D I COES D E CONTO R N 01
,.,/l,4X 11 NO OIR, 1 OIR, 2 DlR ,l ROT,lr;A0',22X,'M A'
•,'TRIZ D E ROTA C A 0 1 ,//(]X,I3,5x,11,l(8X,Ii ol),4X,9ft0,5))
WRITECIW,800) LBNOS 800 FQRM-TC// 1 10X,ILARGUR4 DE B-NDA EM NOS 1',Il,//)
RETURN END

1 O
2
3
126
SUBROUTINE ROTCR,RLOCAL,CX,CY,CZ,K) DIMENSION R(3,3l,RLOCAL(20,q) . IF( K ,EO, O l GOTO 2 DO 10 1=1,:S RC1,Jl:RLOCAL(K,1l RC2,l)=RLOCAL(K,I+3) R(l,Il=RLOCAb(K,I•ól RETURN Q:SQRTCCX*CX+CZ•CZJ !F( Q ,GT, 0,000) ) GOTO l R C 1 , 1 ) :.o, . RC!,2Jt:CY R(l,3)::0, R(2, 1 l=~CY RC2,2l=Q, R(2,l)"O, R(3,l)=O, R(3 1 2)=0, R(3 1 3)iq, RETURN R(1,!l=CX R(l,2J=CY R(1,3)o:CZ R(2,tl::•C~•CY/Q R(2,2)=0 IH2,3):•CY•CZ/G R(3, 1 ):: .. CZ/0 R(J,2).:;o, R(3,3J:CX/Q RETURN ENO
/

127
SU6ROUTINE ROTM(RTSR 1 S,R) DIMENSION RTSR(b1bl,6Cb,b),R(3,3) DO 10 I=l,3 DO 10 J"l,3 E:: O• · f:O, G:: O, DO 20 N=1,3 RT=R(N, Il DO 20 ~=1,3 E:E+RT•S(N,K)tR(K,Jl F=F•RT•SCN,K+3)•R(K,Jl
20 G=G+RT~S{N+3 1 K+3)*RCK,J) RTSR(I,J):E RTSR(I,J+3l=F
10 RTSR(I+3,J+3)=G DO ,o I=l,S II=I+I DO 30 J::II,b
30 RTSR(J 1 T.):RTSR(I1Jl RETURN -END
SUBROUTINE MULTVCYT!,A,VT2,Nl,N21ITRANS) DIMENSION VTl(Nl),VT2(N2),A(Nl,N21
_JF( l!~ANS ,NE, O ) GD TO 2 DO 10 I:1,NI VTl(I):O, DO 20 J=t,N2
20 VT1(l):VT1tI)+A(I,J)tVT2(J) 10 CONTINUE - .
RETURN 2 00 30 I=l,NI
VTl(Il:o, Do ao J=!,N2
40 VTICI):VTÍ(I)+ACJ,I)~VT2CJ) 30 CONT INLJE
RETURN ENP

128
SUBROUTINE MULTM(C 1 A 1 B1 Nl,N2 1 N3l DIM~NSION C(N!,N3),A(N1,N2),B(N2,N3),V(3) DO 10 l=!,N! DO 20 J:1,Nl V(Jl=O• DO 20 K=l,N2
20 VCJl=V(J)+A(I,Kl•B(K,J) DO 30 J:t,Nl
30 C(I,Jl=V(Jl 10 CONTINUE
RETURN END
SUBROUTINF. SACAP(I 1 P 1 N1 VE·T,NV) COMMON /GERAL/lR,IN,lT1NNE,N;LN,NNOS DIMENSION P(NGLN),VETCNV) Kt:NGLN•(NNOS•(l•ll•N•ll DO 10 K:t,NGLN . KK:1(1+1<
10 P(K):VET(KKl
10
RETURN EtJD
SU8ROUTINE BOTAP(I,P,N,VET,NVl COMMON /GER~LIIR1IW,IT,NNF.,NGLN,NNOS .D I MENS I ON _P {_NGL.N t, V_E T (N_VJ_ l<t:NGLN•(NNOS•(IMl)+N-1) 00 10 K=l,NGLN . KK:Kt+K VF.T(KK)=P(I<) RETURN E:ND

129
SUBROUTINE SACACTEMP 1 N1,N2,VETl COMMON /GERALIIR,IW,IT,NNE,NGLN,NNOS,NELEM,NAP,NNED1LBNOS DlMENSION TEMP(NGLN,NGLN),VET(IT) Kt:::NGLN•(N!•I) K2=NGLN*(N2•Nl) IF(Nl•N2)!0111,12
10 DO 20 l=l,NGLN 00 20 J:1,NGLN lNO=NGLN•LBNOS•CK!+!•!)+K2tJ•J+!
20 TEMPCl,Jl:VfT(IND) RETURN
11 DO 30 I=1,NGLN DO 30 J=I,NGLN lNO:NGLN•LBNOS~(Kt+I•!)+J•I+I TEMP(I,J):VET(IND)
30 TEMP(J,Il=TEMP(I,J) RETURN .
12 WRITE(IW,100)N1,N2 100 FORMAT(/11QX!ERRO NA SUBRT, SACA NI= 'Il' N2= 1 Ill
CALL EXIT END
SUBROUTINE BOTA (TEMP,Nt,N2,VET) COMMON IGERALIIR,I~,IT1NNE,NGLN,NNOS,NELEM,NAP,NNED,LBNOS OIMENSlON TEMP(NGLN,NGLN),VETCIT) Kl=NGLN•(Nl•I) . K2:NGLN• (N2•NI) I F ( N 1 "N2) 1 O, 11 1 12
10 00 20 1=1,NGLN DO 20 J=!,NGLN INO=NGLN•LBN0St(Kl+I•l)tK2tJ•I•1
20 VETCIND)=TEMPCt,Jl RETURN
11 DO 30 1=1,NGLN 00 30 J=I,NGLN IND:NGLN•LBNOS•(Kt+I•l)+J•I+!
30 VET(lND):TEMPCl,J) RETURN
12 WRITE(IW,100)N1,N2 IDO FORMATC//IOX'ERRO NA SUBRT, BOTA NI= 'Il 1 N2= 'I3)
C4Ll. EXIT (NO

130
SUBROUTINE MONTA(MAT 1 NO,ED 1 MQUK) LOGlCAL BOOL1IMPRJM INJEGER TIPEL,CONEC,TlPAN,ESTAB REAL MAT,IZ,MESP,LZERO CQMMQN /GERALllR 1 IW,tT,NNE,NGLN,NNOS 1 NELEM,NAP1NNED1LBNOS,
*TIPAN,EST•B,INROT,MASSA COMMON /PROPIAX(lOO),MESPClOOl,CONECClo0,2),XCIOO),Y(IOOl,
tZ(!OOl,ECI00) 1 1Z(!OO),ITIPO(IOOl,LZERO(IOO),XZER0(100) 1 .
•YZERO(IOO),ZZERO(!OO),ANGZ(!OOJ,FZERO(!OO),RIGEL(IOO,b,b), •FORCA(IOO,b)1D2(3D0l 1 FEC30D) . . .
CoMMON /LOGICO/ BOOL,IMPRJM,JNT DIMENS{ON RIGE(b 1 b)1TEMP(1,3),N0(50)1EDCS01Q),MAT(lTl IFC MOU!< ,NE, 1 ) GOTO 111 . . IF( MASSA ,EQ, 3) GQ TO ~22
111 DO 20 NEL=l,NELEM TIPE~=lTlPOCNEL) GOTO (!,2) 1 MQUK
! GOTO (3 1 Q1 U,4 1 q),TIPEL 3 CALL MASSP(NEL,RlGE,lNROT,MASSA)
GOTO 7 q CALL MASSC(NEL,RIGE,MAS5Al
GOTO 7 2 GOTO CS,ó,& 1 &,b),TIPEL 5 CALL RIGEP(NEL,RXGE)
GOTO 7 b CALL RlSEC(NEL,RIGE) 7 DO JO I~l,NNE
N1=CONEC(NEL 1 I) DO 110 J=I,NNE N2:CONECCNEL 1 J) IF(N!•N2)11,12,12
11 Ntt::N2 N22=N! GO TO 13
12 Nl1=NI N?,2:N2
13 CALL SACA(TEMP 1 N22 1 N!! 1 MAT) IF!Nl•N2)15,lb,IQ
14 DO 50 KK:1,NGLN tK:NGLN~(I•l)+KK DO 50 L=t,NGLN. IL=NGLN~(J .. l)+L
50 TEMP(L,KKl=TEMPCb,KK)+RtGECIK,lLl GOTO 71 .
IS DO bQ KK=1,NGLN JKCNGLN*(I•l)+KK DO &O L=l,NGLN IL=NGLN, CJ•I) tL
bO TEMP(KK,L)=TEMPCKK,L)+RIGE(IK,IL) GOTO 71
lb DO 70 KK=t,NGLN

ll<=NGLN•(l•! l+KI< 00 7() L=KK,NGLN lL=NGLN•0.,1 l•L
131
70 TEMP(KK,L)=TEMP(KK,L)tRIGE(IK,ILJ 71 CALL 80T4(TEMP,N22,Nlt,MAT) -<lo CONTINUE .39 CONTINUE 20 CONTINUE 222 JF( NNEO ,LT, 1 ) RETURN
JJ:.2i>NGLN IF(MOUl<,EG,I) JJ=O DO 80 J;;\,NNED NOI=NO(l)"I 00 '10 Jr:t 1 NGLN INO=LBNOS•NGLN•(NGLN•NOitJ .. l)+l MAT(IND)=MAT(IND)+ED(I,J+JJ)
<IO CONTINUE 80 CONTINUE
IF( TIPAN ,NE, 3 ,OR, MOUK ,NE, 2 ,OR, ,NOT, BOOL l RETURN DO 82 t=l,NNED 11:NGLNi>NO(ll+I DO 82 J=!,NGLN
82 FECII•J):FECII•J)+D2(1J•Jl•ED(J,JtJJl RETURN . - - - -END

132
SUBROUTINI EXCITA(T,F,Df,NEQ) HHEGER CONEC REAL MESP DIMENSION F(NEQJ,OF(NEG) COMMON /PROP/AX(lOÕ),MESP(lOO),CONECCI0012)1X(IOO) COMMON /MDVEL/ PV,VI,A,NEP 1 NELP,xLOCAL,XEL- -XL;Xl;L NEL=NEL.P DO 10 I=l,NEQ F<JJ:o,
10 DF(I):o, !F(T ,NE, O,) GOTO 11 XL:X(CONECCl,2)) NEL':t
li E=XLOCALIXL E2=E•E E.3=E2*E V=VI+A*T I=CCONEC(NEL,ll•l)•3 J=CCONEC(NEL,2)•))*3 F(I+2);Py•Cl,•3,*E2+2,*E3) F(l+3):PV•~L•l~(!,•E)•Cl,•El F(J+2)=PV*(3,•E2•2,*E3l FCJ+3):PV•XL•E2•CE•!,) DF(lt2):PV•V•(•l,*E+b,*E2)/XL _DF (1+3)=pv~v·c 1,•'l. *E•3,*E2l DF(J+2l=•DFCI•2l DFCJ+3):PV•V•C3,•E2•2,•El RF.TURfll END

133
SUBROUTINE APOIO(MAT,VET,NEQ,NVET,RLOCAL,MCC,KOD/ REAL MAT COMMON /GERAL/JR,JW,IT,NNE,N.GLN.,NNOS,NELEM,NAP,NNED,LBNOS DIMENSION PC3l,P1(3) 1 C(3,3),CT(3,3),RC3,3l,RT(J,3),TEMP(3,3
•l,RL0CAL(20,q),MCC(20,S),REMP(3,3)~SEMP(3,3l,VET(NEQ), •MAT(ITl . .
DO 10 MM=t,NAP N.llMCÇ(MM,!) DO 20 I:;t,NGLN DO 30 J=t,NGLN C<I,J):io,
30 RCI,J):O, C(J,Il=t•MCC(MM,l+l)
20 R(l,I):1, lF(MCC(MM,NGLN.+2))1,211
1 CALL ROTCR,RLOCA~,CX,CY,CZ,MM) CALL MULTMCC,C,R,NGLN,NGLN,NGLNl
2 GO TO(U2,21,21),KOD 21 00 22 I=l,NGLN
DO 22 J=1,NGLN RTCJ,I):R(I,Jl
22 CT(J,I):C(I,J) IFIM=LBN0S•1 DO 40 1=1,r•IM J::N•I IFCJ)S,S,3
3 C1LL ~iCA~TEMP 1 J 1 N,MATl CALL MULTM($EMP,TEMP1CT,NGLN,NGLN,N.GLN) CALL BOTA(SEMP,J,N,MAT)
5 J::IHI lF(NIIQ5 .. Jl40,b,b
b CALL S~CACTEMP,N,J,MAT) CALL MULTM(SEMP,C,TEMP,NGLN,NGLN,NGLNl C~LL BOTA(SEMP,N,J,MATl
40 CONTINUE CALL 5ACA(TEMP 1 N1 N1 MATl GO T0(42,42,43),KOD
42 00 120 KK:1,NVET CALL SACAP(KK,P,N,VET,NEQl CALL MULTV(Pt,C,P,NGLN,NGLN,O) c•LL BOTAP(KK,Pt,N,VET,NEQ)
120 CONTINUE ~l GO TO(l0,121,121),KOD 121 C•LL MULTM(S~MP,TEMP 1 CT,NGLN 1 NGLN,NGLN)
CALL MULTM(TEMP,C,SEMP,NGLN,NGLN,NGLN) DO lóO LL~l,NGLN
lbO TEMPCLL,LLl=TEMP(LL,LLl•MCCCHM,LL•tl CALL BOTACTEMP,N.,N,MAT)
10 CONTINUE GO TO(lB1,11,!1),KOD
11 DO 180 I•l,NNOS

134
IND:LBNOS•NGI.N•CNGLN~(I•!)+2)+1 IF(MAT(IND)ll80;)70,l80 -
170 MAT(INOJ:1. 180 CONTINUE 181 RE1URN
END
SUBROUTINE TRIANGCA,NEA,NEQ) DIMHJSION A CNEA) LB:NEA/NEQ OQ 30 N=l,NEQ l=N DO 29 L:.2,LB I=I+I 1 NO:;L + Ci',• 1) *LB IF(A(IN0))24 1 2q,24
24 c:A(IND)/A(l+INO•L) J=o 00 27 !<=l.,LB J:J+1 H,O}:;~+CN•l l•LB IF(A(lN01))2b,27,2&
2& lND2=J+(I•1)~L6 A(IND2):A(IND2)~C•A(IND1)
27 CONTINUE __ _A_( I NO l =e
2q CONTINUE 30 CONTINUE
RETURN END

135
SUBROUTINE RES08(A 1 NEA,B,NEB 1 NVET) DIMENSION A(NEA),B(NEB) NEQ:NEB/NVET . L8:fJEA/NEG DO 30 N=l,NEQ I=N DO 29 L=2,L8 I=I+I IND:.L• (N"'l ),>l,.B IF(A(INDl)28,2Q,28
28 00 281 IV=l,NVET INC=(IV•l)i>NEQ
281 BCI•INC):B(I+INC)•A(JND)•B(NtINC) 2Q CONTINUE
00 291 IV=l,N\iET JNDV:N+(IV•!l*NEG
2QI B(lNDV):B(INDV)IA(l+(N•ll•LB) 30 CONTINUE -
N=NEQ 35 NCN'"l
1FíN)50,50,lé 3é L=N
Do 40 K=2,LS L=L+l IND=K+(N•ll•LB IF(A(XND))31,ao,37
37 DO 371 IV=t,NVET INC=(Iv•tl•NEQ
371 B(N+JNC):B(N+INC)•A(JNO)tB(L+INC) 40 CONTINUE .
GOTO 35 50 RETURN
ENO
SUBRDUTINE RES00(A 1 NEA 1 B1 NEB 1 NVET) DIMENSION A(NEA) 1 B(NE8) NEG=Nf.8/NVET . LB=NEA/NEG DO 20 IV=l,NVET IVET:(JV•ll•NEQ DO lO t=1,NEf.l
10 B(I+IVtT)~BCI+IViTl/A((I•ll~LB+ll 20 CONTINUE -
RETURN ENO

136
SUBROUTINE GLOBAL(P,NP,MCC,RLOCALl CQMMQN /GERALltR 1 IW,lT 1 NNE 1 NGLN,NN05,NELEM,NAP DIMENSION P(NP),RLOCALC20,q),RC3,3),U1Cl),U2(l),MCC(20,5l NVET=NP/(NGLN•NNOS) - . - . DO 10 !=1,NAP . If(MCCCI,5))1,10,1
1 CALL ROT(R1RLOCAL,CX,CY,CZ,I) DO 20 J=i,NVET c•LL SACAP(J,U),MCCCI,1)1P,NP) CALL MULTVCU2,R,U!,NGLN,NGLN,1)
2D CALL 80lAP(J 1 U2 1 MCC(I,ll,P,NP) -10 CONTINUE
9 1 O
1 1
12 19 2Q 30
RETURN ENO
SUBROUTJNE MULTB(A 1 V,P 1 NA,NV) OIMENSION A(NA),V(NV),PCNV) LB=N•.INV 00 30 I=l,NV P(I)cO, DO 20 J=l,NV J8=J•I+1 IF(JB•LB)q,q,30 IFCT•Jl 10, 10, 11 INOcJBt<l•l )•LB GOTO 19 IB=l•Jtl IFíJB•LBl12,12,20 IND=IB+(J•I )•l.a PCI):P(Il+A(lNOl~V(J) CONTINUE . CONTINUE RETURN END

137
SUBROUiINE CONVCVl,V2 1 N,TOL,ICONVl REAL NORMl 1 NORMD COMMON /GERALIIR1IW OIMENSION Vl(Nl,V2(N) lCONV:1 NORMl=O, NORMD=O, DO 10 I=l,N NORMt=NORM!tlil (I)•VI (I)
10 NORMD=NORMO+(V2(I)~V1(I)l**2 NORMl=SQRTCNORM!) NORMO:SQRT(NORMD) IF(NORM!•l,E•l5)101,101,102
101 WRITE(IW,100) 100 FORMAT(/ 1 10X1'NORM- DO VETOR VI MENOR QUE 1,E•IS'.l
NCRMl=l, 102 IF ( CNORMO/NORMI )•TO!.) 12, 12, 11 11 lCQNy:z 12 RETURfl
END

1
10
2
20
138
SUBROUTINE MASSP(NEL,RTSR,INROT,MASSA) tNTEGER CONEC REAL MESP,tZ COMMON /PROP/AX(IOO),HESP(IOO),CONECCI00,2),X(IOO),YCIOO),
•Z(!OO),E(!OOJ,I2(100l,ITIP0Cl00) . . . DIMENSJON RIGECb,b),RTSR(b,b),R(3,ll1RLOCAL(201q) DX:X(CONEC(NEL,2)l~X(CONEC(NEL,ll) -DY=Y(CONEC(NEL,2)) 8 YCCONECCNEL,1)) XL=SQRT(DX*DX+DY•DYl -CX::oDX/XL CY=D\'IXL f:MESP(NELJ•AX(NEL)•XL G:MESP(NELJ*IZ(NEL)*INROT GOTO (1,2ill,MAS5l RlGE ( 11 I ):F/3, RJGE(l,2)=0, RIGEC1,3):0, RIGE ( 1,,q:F/ó, RIGEC1 1 5)=0, RIGECl,&):O, RIGE(2 1 2)=F•l3,l35, R!GE(2 1 3l=F•!!,1210,*XL RIGE(2,4)::0, RIGEC2,Sl=F•9,/70, RIGE(Z,b)C•F*l3,/q20,•XL
+ +
.. +
R J GE O ,3) =F '1 os. otX_L~XL ___ + RIGEC3,ll):0, RIGE(3 1 5):•RIGE(2,ó) RIGE(3,b)=•F/IQO,*XL•XL RIGE(Q,4):RJGEC!,1) RIGE (!l 1 5)i=O, RJGE(ll,E>)=O, RIGE(5,5):RIGEC212l RIGECS,b)=nRIGE(2,3l RIGE(E> 1 b)=RJGEC3,3) 00 10 1=1,5 . II=ltt oo 10 J=II,b RIGE(J,Y)=RIGECI,J)
..
CALL RoT(R,RLOCAL,éX,CY,o,o,o) C~LL ROTM(RTSR,RlGE,R) RETURN DO 20 1=1,b DO 20 J=t,b RTSRCI,J):O, RTSR(l,t)=F•0,5 Rr5R(2,2)=RrsR(1,1) RTSR(3 1 3):F•XL•XL/4?.0, RTSR(ll 1 1l):RTSRC!,1) RTsRCS,Sl=RrsRC!,1) RTSRCb,b):RTSRC3,3)
t
G*l,2/~L G•o, 1
c;•t,2/XL G*O,I G•2,115,,.XL

139
3 RETURN END

140
SUSROUTJNE MASSC(NEL,RTSR,MASSAl INTF.GER CONEC,TIPEL REM. MESP COMMON /PROP/AX(I00) 1 MESP(100l,CONEC(I00,2)1X(100),YCIOO),
•ZC!OO),E(IOO),IZ(IOO),ITIPO(lOOl . . . DIMENSION RIGE(ó,ól,RTSR(&,&),R(J,3),RLOC•LC20,9l TIPEL=ITIPO(NEL) . DX::X(CONEC(NEL 1 2))•X(CONEC(NEL,1)) DY:Y(CONECCNEL 1 2J)•Y(CONEC(NEL,l)l DZ=Z(CONEC(NEL12)l•ZCCONEC(NEL,1ll IF( TIPEL ,LT, a) DZ=o. . XL::SQRT(DX*DX•DY•DY+DZ•DZ) CX::PX/)(L CY=DYl)(L CZ;oDZ/XL GOTO (111,222 1 333),MASSA
Ili f::MfSP(NEL)*AX(NEL)•XL/3, RJGE(1 1 1):F -RIGE(1 1 2l=O, RIGE(1 1 3l=o, RIGE (1,4l=F*0,5 RIGE0,5)=0, RIGE(1,b)::o, RJGEC2,2)::F RIGE(2 1 3)=0,
_RIGEC_2_ 1 11):o, RIGE(2,5)=F•o.s RIGEC2 1 b)::O, IU GE (3, 3) =O, RJGEC.J,u)=o, RIGE(3,S)i;O, RIGEt3,E>)=O, ?IGE(4,l.!)=F RJGECll,S)cO, RIGE(ü,b)=O, RIGE(S,S)=F RlGE (5,&);'•0, RIGECE>,b)=O, Go roC70,2,2,1,1l,rtPEL
1 RIGE(3,3)= f RIGE(3 1 6)= F•0,5 RIGE(b 1 t,):; F 00 lO I=\,5 II=I+I DO 10 J=II,E>
10 RIGE(J,ll=RIGECI,J) CAL~ ROT(R,RLOCtL,éX,CY,CZ,O) CALL ROTMCRTSR,RIGE,Rl RETURN
222 00 20 Ict,b 00 20 J=l,t>

20
30
333 70
141
RTSRCI,J):o, RTSR(l,1):MESPCNEL)*AX(NEL)*XL*0,5 RTSR(2 1 2)=RTSRCl1l) . RTSR(~,4):RTSR(t,!i RTSR(S,S)=RTSR(l,!) GOTO (70,333,333,iD,3Dl,TIPEL RTSR(313):RTSR(l,1) RTSR(&,6):RJSR(t,ll RETURN . C~LL EXIT END

142
SUBROUTINE RIGEP(NEL,RTSR) LOGtCAL 600L,1MPRIM INTEGER CONEC,TIPAN REAL IZ,MESP,LZERO COMMON /GERALIIR,I~,IT,NNE,NGLN1NNOS,NELEM,NAP1NNEO,LBNOS,
•TJPAN COMMON /?RQP/AX(!OO),MESPC)OO),CONECCI00,2),X(IOOl,Y(tOO),
•ZCIOOl,E(IOOl,IZCIOOl,ITIPO(!OOl1LZERO(IOO),XZERO(lDOl, -•YZERO(IDO),ZZERO(IOO),ANGZ(!OOl,FZEROC!OO),RiGEL(lOO,b,b), •FORCA(IOO,&),D2(300) 1 FE(300) . -
COMMON !LOGICO/BOOL,IMPRIM,!NT OlMENSION RIGE(b,&l,RTSR(b,b),R(3,3l,RLOCAL(201ql,
~ F!Cl),F213l,V1(3l,V2(3l,FEL(&l,VGCbl E Q UI V!< L EN CE C FEL ( \ ) , F ! Cl )') , ( F E(. ( 4 l Í F 2 ( 1 J )
* (\IGCi),V!Clll1CVG(tll,V2(!)) OX=~(CONEC(Nf,L,2))~xccoNEC(NEL,t)) OY:V(CONEC(N~L,2))•Y(CONEC(NF-L,1)) XL=SQRT(O~•DX+PY•DY) -CX=DX/XL CV:OY/XL CA~L ROT(R,RLOCAL,CX,CY,o,o,ol EA=E(NELl•••CNELl EI:F.(NEL)*IZ(NEL) NEGl=NGLN•NNOS GO TO(t,2,2),TtPAN
1 F:FZERO(NELl GOTO 3
2 f:(~L-LZERO(NEL)l/LZEROCNEL)tEA 3 RrGE(l11l=EA/XL
RIGE(1,2)=o, RI GF. ( l 1 3) "O• RIGE(l,ll):~RIGE(l,I) RIGE(l,S)=O, RíGE(l,bl=o, RIGE(2,2)=12,*EI/(XL**3) + F•l,2/XL RIGE(2,3)~ó,•El/(XL•XL) • FtO,I RH,Eç2,ai::o, RIGE(2 1 5l=~RIGE(2,2) RIGE(2,b)=RIGE(2,3l RIGEC3,3)=Q,*EI1XL + F•2,l15,*XL RrGE(l,ll)=o, RIGE(l 1 5):eRIGE(2,3) RIGEC3 1 ó)"2,*EI1XL - P/30,*XL RIGE(a,a)=RIGECl,1) RIGE(ll,S)=o, RtGE (11,ó)"O, RJGE(S,5)=RIGE(2,2) RIGECS1b):RJGF.(3iSi RlGECó,b)=RIGE(l,3l ºº 1 O l = 1, 5 -II=I+I

143
DO 10 J:II,& 10 RIGECJ,I)"RIGE(I,Jl
GOTO (23,21,22),TlPAN 2\ !F(.NOT, tMPRIM) GOTO 1.1
22 CALL SACAP(l,F!,CONEC(NEL,1),02,NEQ) CALL SACAPCl1F2 1 CONECCNEL,2l 1 D2,NEQ) CALL MULTV(V!,R,fl,3 1 31 0) CALL MULTVCV2,R,f2,3,3,0) F'EL(tl=•F FEL(2):(VIC2)•V2C2))*12,~EI/(XL*~3)+(V1(3J+V2(l))*&,•EI/
• . . . . (XL~XL) . FELC3l=(V!C2)•V2(21)•b,•EJ/CXL•XLl+CV2(3)+2,•VIC31)~2,*EI/
* XL . l'EL(ll)i: F FEL(S):"rEl.(2) FEL(6):(y1(2l•v2(2)l•b,•EI/(XL*XL)+(vl(ll+2,*V2(J)l*2,•EI/
* XL 00 bO I=l,6
=O FORCA(NEL,Il=FEL(Il GOTO 4 .
23 00 1.10 I=l,b 00 1.10 J:1,=
ao RIGEL(NEL,I,J)=RIGECI,J) 4 CALL RQTM(RTSR 1 RIGE,RJ
IF( lNT ,EO, O ) GOTO 5 IF( TlPAN ,NE, 3 ,OR, ,NOT, BOOL) RE_lURN
5 ·t~L~·MULT~(Vl,R,Fl,3,J,11 CALL MULTV(V2,R,F2,l 1 31 !) CALL SACAP(l1F!1CONEC(NEL,1),FE,NEG) CALL SACAPCl,F2,CONEC(NEL 1 2l,FE,NE~) oo 30 r=1,1i
30 FEL(I):FELCl)+YGCI) CALL BOTAPC!,Fl,CO~EC(NEL,1),FE,NEQ) CALL BoraPC!,f2,CONEC(NEL,a),FE,NEG) RETURN . . . END

50
1
ºº
bO li
144
SUBROUTINE RIGECCNEL 1 RTSR) LOGICAL BOOL lNTEGER CONEC,TIPAN,TIPEI. REAL MESP,IZ,LZERO COMMON /GERALIIR,IN,IT,NNE,NGLN,NNOS,NELEM,NAP,NNED,LBNOS,
•TIPAN COMMON /pROP/AX(t00) 1 MESP(!OO),CONEC(I00,2),X(IOO),v(IOO),
~Z(\00) 1E(!OO),IZ(!OO),ITIP0(!00)1LZER0(100),XZERO(!OO), . *YZERO(IOOl,ZZERO(IOO),ANGZ(lOOl,fZERO(!OOl1RiGEL(l001b,ól, •FQRCA(!00 1 ó),D2(300),FEC300) . .
COMMON /LOGitO/BOOL,IMPRIM,INT DlMENSIDN RIGE(b,ól,RTSR(b,b),RC3,3l,RLOCAL(201ql,
• Ft(3l,F213),Vl(3),v2(3),ffL(ól,vG(b) . EGUIVALENCE (FELC!l,Fl(ll'l,CFEL('ll,F2(t)l
~ (VG(i),V!C!)l 1 (VG(4),V2(!l) TIPEL=ITIPOCNEL.) DX:X(CONEC(NEL,2))-X(CONECCNEL,1l) DY:Y(CONEC(NEL,2l)•Y(CONEC(NEL,l)l oz=Z(CONEC(NEL,2))•Z(CONEC(NEL,l)l IF( TIPEL ,LT, u) OZ:O, XL:SQRT(DX•DX+OY•DY+Dz,oz) CX=OXIXL CY=OY/XL CZ:DZ/XL. DO 50 I=t•ó FEL(I):O, FORCtdNEL., I ):O, 00 50 J:1,ó R J Gf;'. ( I , .J l : O , GOTO (2,1,1),TIPAt; F:(XL•L.ZEROCNEL))/LZERO(NELl*E(NELJ•AX(NELl/XL !FC F ,GT, 01 ) GOTO 3 . . . GOTO C70,3,20,3,2ol,TIPEL F:FZEROCNELl/XI,. RIGE(l1ll=ECNEL)*AXCNELl/XL RXGE(l 1 4)=•RIGE(l,1l RIGE(4 1 !):RIGE(l,4) RtGE(a,a)=RIGECl,t) RlGE(2 1 2)=F . RJGE(2,5l=~F RIGE(S,2J: .. F RJGE(S,Sl=F GOTO (70,óO,ó0,40,40),TIPEL RIGEC3,3)= F RIGE (3 1 bl=•F RIGE(b,3):•F RIGECb,b)= F Go TO cs,o,~),T!PAN U2=CXL•LZEROCNELl)/LZEROCNELJ•XL f0RCA(NEL,ll=U2~RIGE(t,aJ FoRCA(NEL,a)=•FoRCA(NEL,ll

FEL(tl:fORCA(NEL,ll fEL(al=•FELCI) . GOTO b
5 DO 10 !=1,b DO 10 J=l,b
145
10 RlGELCNEL,I,JlcRIGE(I,Jl b CILL ROT(R,RLOCAL,CX,c~.cz,oJ
CALL ROTM(RT$R,RIGE,R) IF( INT 1 EQ, O l GOTO 7 IF( rIPAN ,NE, 3 ,OR, ,NOT, BOOLl RETURN
7 NEQ=NGLN*NNOS CALL MULTV(V! 1 R1 F!,3 1 J,11 CALL MULTVCV2 1 R,F2 1 3,J 1 1) CALL S•CAP(l,f2,CONEC(NEL,2l,fE,NEQ) CALL SACAP(!,F!,CONEC(NEL,l);FE,NEQ) DO 30 I=t,b . -
3Q FEL(I)=FELCI)+yGCil CILL BOTAP(t,F1,co~EC(NEL,ll,FE,NEG) CALL BOTAPCl,F21CONEC(NEL,2J,FE,NE~)
20 RETURN -70 CALL EXIT
ENO
SUBROUTINE SAIDA(T,lTERAD,ITERA1D2 1 V2 1 A2 1 NEQ) JNTEGER ESTAB,TIPAN,ClRREG COMMON /GERAL/IR,l~,IT,NNE 1 NGLN1NNOS,NELEM 1 NAP,NNE0 1 LBNOS 1
*TIPMJ,ESTAB, INROT ,MASSA; IA MOR, AL}~,BETA, TOL!, TOL.2, TF, TAU, •IMPRES,CARREG
COMMON /IMPRE/IMPSl,IMPDVA(IOO) OIMENSION D2(NEQJ,V2(NEG),A2(NEQ) GOTO (1,2),CARREG
l WRITE(I~,lOO)T,ITERAD,lTERA GOTO 3
2 TR::2.•T/TF WRITE(JW 1 l00)TR,ITERAD 1 ITERA
100 FOFIMI\T(/IOXITEMPO t,El5,7,5~,!ITERAC:0ES !I2,• , '121) 3 IF(IMPSI ,EQ, O) RETURN
WR!Tf(IW,200) 200 foRMAT(l/,JX, 'N0',1ox,1011,11x, 1v1•,11x,141 ',t3X, 102t,11x,
••v2•,11x, 'A2',13~, IOJ',tlX, •v31,11x, IA3•,,1 -DO 10 J=l,NNOS -1=31tJ~2 IF(IMPDVA(J),EQ,1) WRITE(IW,300) J,D2CI),V2(I)1A2(I),
* . D2CI+ll,V2(Itl),A2(It1l,D2(lt2),V2CI+2),A2<I+2) 300 FoRMÀTCI4,~X,3E!3,S,2X,3~13,S,2X;3E13,S) . 10 CONTINUE .
RE TlJRN END

êOO
30
20 1.10
300 1 O
SU8ROUTINE ESFLIN INTEGER CONEC REAL MESP,1Z,L2ERO
146
COMMQN /GERAL/lR,IW,IT,NNE,NGLN,NNOS,NELEM COMMDN /PROP/AX(IOOl,MESP(lDO),CONEÇ(I00,2),X(tOO),YCIOO),
•Z(IOOl,E(I00)1lZ(IOO),lTIPO(IOO),LZERD(IOO),XZERO(lOO), . •VZERO(lOOl,ZZEROC!OO),ANGZ(lOD),~ZERO(tOO),RIGEL(lOO,b1b)1 •FORCA(1DO,b),D2(300J .
COMMON IIMPRE/IMPS1,IMPDVA(IOO),JMPS2,IMPFOR(100) DIMENSION RIGE(b 1 b),Vt(3),V2(3),V3(3l,V4(3),V(ó)íR(3,3),
• F(bJ,UCó),RLOCAL(2Q,q) -EQUIVALENCE (V3(1),V(l)l,(V4(1),V(4l),(Vl(1),U(!ll,
•(V2(!) 1 UCU)) - -NEQ:NGLN~NNOS ' wRITE(lW,200) FoRMAT(/l,2X, 'EI..EM,
*'ESF, 3 1 ,8~,'NO 21 NO li ESF, 1',12X 1 'ESF, 2 1
1 12X, ESF, 1',!2X,'ESF, 2•;12x,,ESf, 31,n
DO 10 I=!,NELEM tF(IMPFOR(ll,NE,I) GQ TO 10
- DO 30 J= 1, b DO 30 K=l,ó RIGE(J,K)cRJGEL(I,J,K) C~LL S~CAPCl1Y!,CONEC:(I,1),D2,NEQ) 'ALL SACAP(l,Y2,CONEC(I,21,D2,NEQ) IF(aNGZ(J) ,EQ, O, ,AND, ITIPQ(I) ,LT, Ul GOTO 20 CX=JXZE:RO{CONEC U,2J )'"XZJBO{CONEC: ( I, U) )_11._lEBO_UJ. ________ _ cv=(YZERO(CONEC(I,2JJ~yzERO(CONEC(I,1)))/LZERO(l) CZ=(ZZERQ(CONEC(I,2l)•ZZERQ(CONEC(I,1)))/LZEROiI) IF( ITIPO(I) ,LT, li) CZ:O, , . CALL ROT(R,RLOCAL,CX,CY,CZ,O) CALL MULTV(V],R,v1,NGLN,NGLN,o) CALL MULTV(Vl.l1R,V21NGLN,NGLN10) CAL\.. MULTVCF,RIGE,V,b,6,0l GOTO 110 CALL MULTVCF1RIGE,U,b,b1D) F(!l=F(t)eFZERO(I) F(u):F(aJ+FZe:Ro(I) WRITECIW,300) I,(FCJ),J:1,b) FORMAT(III,' ;,,, ',3E!6,7,UX 1
1 ~ 1 ,3E16,7l CONTINUE RETURN ENO

147
LOGICAL BOOL,IMPRIM INTEGER CONEC1TIPAN,ESTAB,CARREG REAL M(IOOOO),K(IOOOO),MESP,IZ,Ml,M2,KMOLA,LZERO COMMON /GERALIIR 1 Iw,IT 1 NNE 1 NGLN,NNOS,NELEM,NAP1NNED,LBNOS,
•TIPAN,ESTAB,INROT,MASSA,IAMOR,ALFA,BETA,TOLl,TOL2,TF,TAU1 •IMPRES,CARREG
COMMON /PROP/AXCIOOJ,MESP(lDO),CONECCI0012),X(I00)1YCI00)1 •ZC!OOJ,E(IOO),IZ(\00),ITIPO(lOOl,LZERO(lOO),IZEROílObl, -*VZERO(t00)1ZZER0(!00)1ANGZC!OO),FZEROC100),RIGEL(!OO,ó,bl1 *FORC~(IOO,&l,D2C300l,FEC300l . . -
COMMON ILOGICO/ 600L 1 IMPR1M,INT COMMON IIMPRE/JMPS1,IMPOVA(IOOl,IMPS2,IMPFOR(IOO) COMMON /MOVEL/ PV,Vl 1 A,NEP,NELP,XLOCAL,MEL . DIMENSION ED(50,q),MCC(20,5J,RLOCALC20,q),N0(50),CADC8l,
• C(IOOOO),P(ÇQO),FC300),DFC300l,D1Cl00)1V1(300), * FI1(300),DFJ!(300),FI2(300),DFI2CJOO),DDCJOO), * DDZC300) 1 Y2(JOO),A2(300l1FÍ22(300),DPI22C3QOJ, * AA(l00),6B(300),CCC300l,AA1(300),BBl(3ool,CCi ~ (300) . . . .
DATA CAD/21,,3,,q,,2,,20.,2.s,1c,,2,s1 TEMPO=TIMEC2) tR:6 I \oi 115 1 TMA;r:=so NNE:;2 NGLti::3 CALL DAOOS(NO,ED,MCC,RLOCAL) Cl=H,U•O,S C2=Tt,U~TAU/12, C3:TAU~TAU/&O,•CAD(4~ESTAB+I) C4=TAU•TAUlóO,•TAU•CAo(a•ESTABt2) C5:TAU•TAU/&O,tCAD(Q~ESTAB+3) Có=TAU•TAU/óO,tTAU•CADCa•ESTAB+4) INCL1=0 -DO 5 1:1,NilP IF(MCC(I,S))ó,S,ó
5 CONTINUE GOTO 7
ó INCLI=I 7 NEQ:NGLN*NNOS
NC:NGLN•LBNOS IT:NEQ•NC DC 10 l=ldT MCI)=o, C(1):o,
1 O K C I l :o, 800Li=.FALSE, 1MPRP1=, TRUE, INT:o CALL MONTA(~,NO,ED,2) IMPRIM::,FALSE,

148
CALL MONTA(M,NO,ED,ll WRITE(IW,3qoz)CFECI),I=t,NEQ)
3902 FORMAT(/lOX,tFORCAS ELASTICAI EM T:0',1,C!OX,3El5,7)) GOTO (103,101,102),IAMOR
!01 DO 11 1=1,IT . 11 C(!)=ALFA•M(I)+SETA*K(Il
IF(NNED,LT,I) GOTO !03 DO 110 I=t,NNED NOI=NO(l)•1 DO 110 J:),NGI.N IND=LBNOS•NGLN*CNGLN•NOJ+J•ll+l
· 110 C(IND)=CCINDl+EDCJ,JtNGLN) GOTO 103
102 READ(IR,400)(C!Il,I=t,IT)' aoo FORMAT(BFIO,Ol 103 f:O,
GOTO (10ó,IQ4),CARREG
104 COMP:X(CONECCNEP 1 2)) NELP:o )(o::o, )(f:L=O,
c~~·~••••e•~~w·~~••~•~~~-~•-•~~~-·~~--ft~•~••••--• CARG~ MOVEL •~•• ! o t\, Q
30
100
óOO
'1 o o
31 32
33 31.1
"º 1 O O O
C~LL EXCITA(T,F,Df,NF.Q) DO 30 I=1,NEQ AA1(l)::O, BBI CI ):O, Dl(I):o. V!(I):O, FUC!l=•CIJ CALL APOIO(M,F,NEG,1,RLOCAL,MCC,2l WRITE(IW,IOO)(H(I);I:t,ITJ . FORMAT(tOX,IM .ATRIZ D E MAS S A',l/,(bElS,7,/ll {F( IAMOR ,NE, 1 l WRITE(IW 1 bQO)(C(IJ,I:1,IT) . . fORMAT(//,IOX,'M ATRIZ D f. AMOR T-E C IM EN Tt
*• ! O' ,li, (bEIS,7 1 I)) WRITE(Iw,qoo)(~Ct),I=t,IT) FORM/\T(//• IOX, IM A T R I Z D E Ri G IDE 2 1 ,//• , . .
•CbEIS,7,/)) IF(MASSA ,GT, () Go TO 31 CALL TRIANG(M,?T,NEQJ CALL RESOB(M,IT1F,NEQ,I) GOTO 32 CALL RESODCM1IT,F,NfQ,ll IF(INCLJ ,GT, O) CALL GLOBAL(F,NEQ,MCC,RLOCAL) GOTO (34,33,33),IAMOR CALL MULTBCC,F,AA,lT,NEQ) Do ao t=t,NEQ DFI1CI)=DF(l)•AA(I) INT=INTH T=HiT*TAU

ITERA:O BOOL:,FALSE, IMPRIM:.fALSE,
149
lf(INT/lMPRES•IMPRES ,EQ, INT) IMPRIM=,TRUE, C•••~--~P~••••••~•AGUI SE INSERE O ~CHEC~"~•w•~•••••••••~"·•~•~••
DO 13 I=1,NEQ DF I 2 (I l =DF I 1 (I) FJ2(J):FJ1(I)+TAU•DFI1(!) AA(I)=Ct•FI1CI)+C2•DFI!(1)
13 68(I)=C3•Fil(l)+Çü•DFil(I) GO TO (t14,131) 1 CM~REG
c~~-~•~~-~~~~~~--~~-~~ea••~~••••~~•8••••••·~-•-~ CARGA MOVEL ~-•~ 13! s=vt•T+O,S•A•T•T
XLOCAL=S•XO IF(S•COMP)43,43,41
41 DO U2 I=t,N(Q F<t>=o.
112 Of(l):O, GOTO 2000
113 IF(XLOCAL,LE,XEL) GOTO 4ü NEl.P=NELP+l IF( NELP ,GT, NEP l GOTO UI xo:xo+xEL XLOCAL=s .. xo XEL:X(CONEC(NELP,2ll•XCCONEC(NELP,1)) WRITECIW 1 60l)T 1 S1 XEL,NELP
bOl FORMAT(/,!8X,!Tl,1qx,1s1,1ex,,xEL•,12x,tNELP',/l1!0X, *3(EIS.7,5X),15 1 /) c•~P-~~-~-~~---~~~w,~e~-~~---~~~-·~e~---~----··· CARGA MOVEL ••••
aa CALL EXCITACT,F,OF,NEQ) 2000 ITERA=ITERA+1
DO 14 I=l,NEQ P(ll:FI2(I) P(ltNEQJ:AA(I)+Cl•Ft2(1)•C2•DFl2(Il
IU P(l+2*NEQ):BB(IltC5*FI2(I)•Cb*DFI2(1l CALL APOIO(M,P,l•NEQ,3,RLOCAL,MCC,l) IF(MASSA ,GT, 1) GOTO 15 C•LL RES08(M 1 IT,P,3•NEG,3) GO TO 1 b
15 CALL RESOD(M,IJ,P,3*NEQ,3l lb tF(INCLI ,GT, O) CALL GLoBAL(P,3•NtG,McC,RLOCAL)
DO 17 I=1,NEQ DD(I):P(l+2•NEQ)+TAU•~11I) D2CI)=D1(Il+DD(Il V2(I)=Vl(ll+P(I+NEQl
17 A2(I):P(Il 200 FORMATl/,bf-15,7)
GOTO (172,\71,171l,IAMOR 171 C•LL MULT8CC,A2,AAl,IT,NEG)
CALL MULTB(c,v2,BB1,IT,NEQ) 172 C~LL MULTB(K,V2,CC,IT,NEQ)
18
202
- 29 li
207 208
210
20
24
2.Q 1 300
25 2501
500
251 252
1S91 ;?b 27
28
150
CALL MULTBCK,DD,CCl,IT,NEGl DO 18 I:::1,NEQ DFI22(Il=DF(I)•CC(I)MAA1(I1 Ft22(Il=FCil-FE(I)•CC\(tl~B6!(Il IF(BOOL.OR,TIPAN,EG.1) GOTO 20 IPC ITERA .LE, 1 l GOTO 208 CALL CONV(DDZ,OD,NEQ,TOLl,ICONV) GOTO (202,2Q7),ICONV 00 201.1 t=!,NNOS X(I):::XCI)+00(3*I•2) Y(I):Y(.I)•OD(3~T•I) ZCl)=Z(I)+ODl3~I) -lTER~D=ITERA CALl MONTA(K1NO,E0 1 2J DO 201:i I=t,?T K(I)::o,5~1<:CI) BOOL.=, TRUE, GO TO 172
/
lf(ITERA,GT,ITMAX) GOTO 241 DO 210 I=l,NEQ DFI2(I):DfI22CI) FX2CI)=FI22(Il DDZ C t) :DO C I) GOTO 2000 CALl CONVCDF12,DFI22,NEQ,TOL2,1CONV) G o T O C 2 5 , 2 1 l , I C Q.N V IF( ITER~ ,GE, ITMAX ) GOTO 241 DO 24 l=l,NEQ 0FI2(I)=OFI22(I) FI2(I):Fl22Cl) GOTO 2000 WRITE(JW,300)!TMAX FORMAT(// 1 10X'NAO HOUVE CONVERGENCIA APOS 1 131 ITERACOES,t
_, EXECUCAO INTERROMPIDA!///,IOX'VALORES FINAIS!!) GOTO 2501 lFC,NOT, IMPRIM) GOTO 251 C~Ll SAI0A(T,ITERAD,ITERA,D2,V2,A2,NEQ) IFCIMPRIM ,ANO, TIPAN ,EG, 1 ,ANO, IMPS2 ,NE, O)CALL ESFLIN IF(,NOT,BOOL,AND,TIPAN,GT,I) WRITE(IW,500) FORMAT(//,!OXI NAO HOUVE CONV~RGENCIA NOS DESLOCAMENTOS,') GOTO (251,2é),lCONV . IF(T•TFl27 1 252 1 252 TEMPO=(TIMEC2l•TEMPO)/éO, WRITE OW, 15'11) TEMPO FORMATt//,IOX,ITEMPO DE PROCESSAMENTO 1',E12,5/ c~u. EXlT DO 28 1=1,NEQ DFII (I)=oFI22(Il Fl!Ol=FI22(!) D1(I):02(I) V! C!)=V2(Il

52
54
55 70 90
800
700 óO
GOTO (2q,zq,so),TIPAN DO 291 I1:t ,Nf;.Q FE(lJ=FECI)•CC1Ctl
151
GOTO (1000,50,SOJ,TIPAN DO 52 I=l,NNOS X(t)=XZERO(I)+P2(3*I•2l Y(l)=YZERO(Il•D2(3*I~t) Z(I)=ZZERO(Il+02(3•Il DO 54 I=!,IT l<(I):O, GOTO (1000,90 1 55),Tl?AN DO 70 1"'1,NEGI FECI)cO, C4LL MONTA(l<,NO,ED,2) IF(,NOT, JMPRJM ,OR, tMPS2 ,EG, Ol GQ TO 1000 WRITE(IW,8QO) FORMAT C/ I, 2X, 1 EL.EM,
•lf:;SF, 3',SX,'NO 21 DO óO I:l,NELEM
NO 11 ESF', \!,12x,•e:sir, 2'.t2X, ESF, 11,12x,'ESF, 2•;12x,1e:sF, 3 1 ,n
IF(JMPFOR(I) ,EQ, ll WRITECiw,700)1,CFQRCA(l,Jl,J:1,bl FORMAT(I4,! "" 1,3El8.7,IIX,'*' 1 3E18,7) CONTINUE GO TO 1000 END