Embed Size (px)
Citation preview

Localizacion topologica basada en vision para robots moviles
Francisco Martın, Vicente Matellan, Pablo Barrera y Jose Marıa CanasGrupo de Robotica, DITTE, Universidad Rey Juan Carlos
{fmartin,vmo,barrera,jmplaza}@gsyc.es
Resumen
Por localizacion se entienden las tecnicas que seencargan de solucionar el problema de determinarla posicion de un robot en su entorno usando suspropios sensores. En este trabajo se presentara unatecnica de localizacion que pretende aportar unanueva manera de localizar un robot equipado conuna camara en un entorno topologicamente estruc-turado mediante tecnicas probabilısticas. Se mos-trara su aplicacion en entornos tan diferentes comoespacios de oficinas o el campo de la Robocup1,y se comprobara como esta tecnica es capaz deadaptarse a las tareas que el robot ha de realizaren estos entornos.
1. Introduccion
La localizacion de un robot en su entorno es unode los problemas clasicos de la robotica movil. Esel punto de partida de otros problemas como sonla interaccion con el entorno, y sobre todo, la na-vegacion.Para la mayor parte de las tareas que unrobot movil tiene que realizar depende de su po-sicion en el mismo. En este trabajo pretendemosdar una solucion de este problema para dos tareasmuy distintas.
El primer caso es el de la navegacion en interiores,concretamente en entorno de oficina. En estos en-tornos existen una gran cantidad de tareas que unrobot puede realizar: llevar el correo de un despa-cho a otro, teleasistencia o tareas de seguridad. Unrobot debe conocer su posicion para trazar rutasdesde su posicion a su destino.
Otro escenario totalmente distinto es la competi-cion de la Robocup. En esta competicion, en par-ticular en la categorıa de las 4 patas2 (fig 1), equi-pos de robots autonomos compiten entre sı en unjuego similar al futbol. Esta competicion lo quepretende es presentar un escenario donde multi-ples campos de la robotica pueden ser evaluadosentre diferentes grupos de investigacion a nivelmundial. En este caso, un robot debe saber su po-sicion en el campo para saber que hacer cuando
1www.robocup.org2http://www.tzi.de/4legged/
Figura 1: Categorıa 4-legged. RoboCup 2006 (Osa-ka, Japon)
Figura 2: Sony Aibo ERS-7
le llega la pelota, irse a una posicion determinadacuando no la tiene, o simplemente, enviarsela a uncompanero para que este pueda tomar decisionesmas “inteligentes”.
El mecanismo de localizacion que se propone eneste artıculo resuelve la localizacion en entornostan diferentes como los expuestos anteriormente.Usa un enfoque probabilıstico basado en Procesosde Markov Parcialmente Observables (POMDP).Divide el entorno donde el robot se ha de localizartopologicamente atendiendo a las caracterısticasdel entorno y/o las necesidades del robot. Se cal-cula una densidad de probabilidad del conjunto deestados en los que dividimos el entorno.
La plataforma en la que hemos probado esta tecni-ca es el robot Sony Aibo ERS-7. Este robot tieneaspecto de perro (figura 2), y sus principales ca-racterısticas son la locomocion realizada con sus 4patas, y la sensorizacion basada en su camara conresolucion de 416x320 pıxeles.
El problema de la localizacion en entornos de ofi-cina ha sido ampliamente estudiado [20], pero lamayor parte de ellos [18] han sido disenados pa-
XXVII Jornadas de Automática
Almería 2006 - ISBN: 84-689-9417-0 1081

ra robot equipados con ruedas, que cuentan conuna informacion odometrica muy precisa e infor-macion sensorial en 360o . Estos metodos no sonaplicables a robots con patas. El tipo de informa-cion recibida de los sensores de sonar o laser esmas facil de procesar que los de una camara, quees el principal sensor en nuestro trabajo.
Otra diferencia clave con respecto a los trabajosanteriores en entornos de interior y sobre todo enel campo de la Robocup es su enfoque topologico.Un representacion topologica del entorno, a dife-rencia de la representacion metrica donde la posi-cion es relativa a unos ejes de coordenadas, divideel entorno en zonas con similares caracterısticas.Estas zonas no tienen por que tener las mismasdimensiones. La division topologica es hecha de-pendiendo de las necesidad derivadas de las tareasde los robots, y mantiene entre cada zona una re-lacion de vecindad. Existen varios trabajos en estesentido, como es [15], pero con robot con ruedas.La idea principal que queremos transmitir es quehay multitud de situaciones en las que un localiza-cion tan fina como la metrica no es necesaria, yaque hay multitud de posiciones de un entorno enlas que el robot realizarıa las misma acciones conla informacion de localizacion. No es tan necesariatanta precision.
Tecnicas probabilısticas markovianas se han usa-do en [2], [5] y [14], pero, otra vez, siempre conrobots con ruedas y sensores de radar o sonar. En[9] se usa una aproximacion markoviana basada envision, pero la informacion extraıda de las image-nes son histogramas y caracterısticas invariantesa la escala (SIFT) [13] que son calculadas a par-tir de un enorme conjunto de imagenes tomadasdel entorno. Nuestra aproximacion no necesita to-mar fotos con anterioridad, solo un mapa 2D delentorno.
En el ambito de la liga de 4 patas de la Robocup,los metodos de localizacion usados pueden apre-ciarse en la tabla 1. La mas usada es el metodode Monte Carlo [19][6][16][17][21][4]. Este metodohace un muestreo en el espacio de estados del ro-bot y mantiene una poblacion de partıculas quevan evolucionando y agrupandose en las posicio-nes donde cree que el robot se encuentra. En [22]se compara Monte Carlo con el filtro de Kalman[8], que es un filtro adaptativo considera optimoy que admite no linealidad y de esta manera per-mite abordar el problema de la localizacion conestas caracterısticas. El filtro de Kalman Exten-dido(EKF) ha sido usado como unico metodo enpuntuales trabajos [11][12] en la Robocup, peroaunque el metodo es potente y se ha probado conexito en otros ambitos [3][10] , en este caso no essuficientemente flexible para adaptarse a entornos
tan ruidosos. El metodo difuso [1][7] es una varia-cion del markoviano, pero dividiendo el terreno dejuego en un grid donde cada celda almacena unaposibilidad difusa tanto de la probabilidad de lacelda, como del estado mas probable y su incerti-dumbre. Este ultimo metodo intenta solucionar elproblema del coste computacional de los metodosmarkovianos puros, pero a diferencia del nuestro,queda limitado por lo estricto de la division delterreno de juego, que en nuestro metodo puede noser regular en forma de grid, y que en cada casillano soporta la posibilidad de ser multimodal. To-dos estos metodos al final son un metodo metrico.La alternativa propuesta es la unica que pretendesolucionar este problema desde el punto de vistatopologico mostrando que es lo suficiente potentecomo realizar las funciones del robot correctamen-te.
Metodo No equiposMonte Carlo 10
EKF 2Monte Carlo + EKF 2
Metodo difuso 1Triangulacion 2
Cuadro 1: Metodos de localizacion utilizados en laedicion de la RoboCup 2004
En la seccion 2 mostraremos los fundamentos dela localizacion markoviana que aplicaremos en laseccion 3 para entornos de oficina y en 4 para lacompeticion de la Robocup, donde profundizare-mos en sus caracterısticas particulares. En la sec-cion 5 analizaremos los experimentos llevados acabo para validar el metodo. Por ultimo, en la sec-cion 6 presentaremos las conclusiones derivadas deeste trabajo.
2. Procesos ocultos de Markovparcialmente observables(POMDPs)
Los POMDPs se caracterizan por modelar pro-cesos estocasticos donde se usa una densidad deprobabilidad Bel sobre todos los posibles estadoss S = {s1, s2, ...} en los que el robot puede encon-trarse. Belt(S = s) representa la creencia de estaren el estado s en el instante t. Al inicio del proce-so de localizacion, dependiendo del conocimientoa priori de la posicion del robot, Bel0(S) puedeestar uniformemente distribuido
Bel0(si) =1|S|
(1)
o centrado en el esto donde la posicion inicial j se
XXVII Jornadas de Automática
1082 Almería 2006 - ISBN: 84-689-9417-0

conoce,
Bel0(si) = 0 + δ,∀i 6= j, δ << 0,01 (2)
Bel0(sj) = 1 − δ, δ << 0,01 (3)
La actualizacion de Bel se divide en dos pasosatomicos. El primero es la fase de movimiento quese aplica cuando el robot realiza un movimiento ocompleta una accion. Se utiliza la informacion dela accion para modificar su creencia sobre su es-tado. La segunda el la fase de observacion, dondela creencia se actualiza en funcion de la informa-cion extraıda de las entradas sensoriales del robot.Este proceso se realiza cuando se obtiene la infor-macion necesaria para cada paso y no tiene porqueser ejecutada de manera alternativa.
2.1. Fase de movimiento
Las acciones de un robot son modeladas como unmodelo de accion p(s′|s, a), que es la probabilidadde alcanzar el estado s′ si la accion a es ejecutadaen el estado s. Para obtener la creencia del conjun-to de estados Belt(S′), se aplica una actualizacionbayesiana. Con cada accion se aplica:
Belt(s′) =∑s∈S
p(s′|s, a) · Belt−1(s),∀s′ ∈ S (4)
2.2. Fase de observacion
Para calcular la creencia actualizada con la infor-macion sensorial Belt(S′), usamos el modelo deobservacion p(o|s′), que representa la probabilidadde estar en el estado s′ habiendo obtenido la ob-servacion o.
Belt(s′) = p(o|s′) · Belt−1(s),∀s, s′ ∈ S (5)
3. Aplicacion a entornos deinteriores
Esta aplicacion pretende detectar la posicion deun robot movil en un entorno de oficinas para quepueda navegar por los pasillos de un despacho aotro. Usara como principal sensor las imagenes dela camara, y utilizara tambien el sensor de infra-rrojos que tiene situado al lado de la camara en elmorro del robot. La informacion que obtendra dela imagen de la camara seran elementos comunesde este entorno, como son las puertas, las luces deltecho y los elementos que tiene a ambos lados elrobot.
Los elementos que se deben definir en cada entornode aplicacion son:
1. El mapa del entorno y como se traduce a unconjunto de estados.
2. El conjunto de acciones que el robot puedellevar a cabo y el modelo de accion asociadoa los estados p(s′|s, a).
3. El conjunto de observaciones que el robot per-cibe del entorno, y su modelo de observacionasociado a los estados p(o|s).
3.1. El conjunto de estados
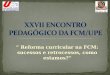
A todas las posibles posiciones y orientaciones enlas que el robot se puede encontrar las denomi-namos como “estados”. Los estados son definidossobre un entorno de oficina (figura 3) formado porpasillos (representados como cırculos) y habita-ciones (representados como cuadrados). No tienenninguna relacion metrica, esto es, un nodo que re-presente una porcion de pasillo con similares ca-racterısticas puede tener una longitud mucho ma-yor que otra porcion de pasillo mucho menor. Re-cordemos que la division es topologica y dependede las observaciones tomadas desde las posicionesdel nodo y de las diferentes acciones que un robotpuede tomar en una zona del entorno.
En la figura 3 se observa los pasos necesarios paradividir un entorno de oficina. Primero se identi-fican los nodos como partes del mapa donde elrobot percibe identica informacion sensorial y lasdecisiones adecuadas en cada momento son tam-bien identicas. Como el robot usa la informacionreferentes a los elementos que tiene a los lados (pa-sillo, puerta o pared), como veremos en la seccion3.3, la division en nodos es realizada teniendo es-te criterio. De este modo, una porcion de pasillosin puertas a los lados en un mismo nodo, pero sihay una porcion de pasillo que tiene una puertaen uno de los dos lados, lo consideramos un nododiferente.
Finalmente, una vez obtenidos los nodos, como ob-servamos en la figura 3, se obtienen los estados enlos que el robot se puede encontrar. Una manerasimple y homogenea es dividir cada nodo en cua-tro orientaciones, ya que un robot ha de realizardiferentes acciones dentro de un nodo dependien-do si esta orientado hacia la pared, una parte delpasillo o la otra.
3.2. Modelo de movimiento
Las acciones que el robot puede tomar en cadaposicion son simples, avanzar hasta el siguientenodo, girar 90o hacia la izquierda o girar 90o a laderecha. Estos giros son en lazo cerrado de maneraque el robot esta obteniendo informacion de sussensores, tanto de infrarrojos como, sobre todo,
XXVII Jornadas de Automática
Almería 2006 - ISBN: 84-689-9417-0 1083

Figura 3: Formacion de los estados a partir de ladescomposicion de los nodos del entorno
de la camara, para detectar cuando ha cambiadode estado. Por ejemplo, si el robot esta orientadohacia el fondo del pasillo y a ambos lados tienepared, y decide realizar la accion de avanzar, elrobot avanzara hacia adelante hasta que en algunode los lados deje de encontrar pared.
El principio probabilıstico de este metodo nos per-mite asociar a cada accion la probabilidad de exitoen la realizacion de la misma. En la tabla 2 que-da definida esta probabilidad. Para el caso de losgiros a ambos lados, la probabilidad de que el ro-bot no realice el giro correcto y permanezca en elmismo estado (N) es 0.15. La probabilidad de quegire 90o correctamente (G) es 0.70, La probabi-lidad de que gire hasta el estado situado a 180o
(GG) es 0.15, y la probabilidad de que gire hastael estado situado a 270o (GGG) es cercana a 0. Deigual manera, para la accion de avanzar hasta elsiguiente estado, la probabilidad de quedarse en elmismo estado (N)es 0.20, de realizar correctamen-te la accion (A) es 0.6, y de avanzar mas alla delestado al que se quiere llegar (AA y AAA) es 0.157 0.05 respectivamente.
Esto permite que el sistema sea robusto a coli-siones, deslizamientos, errores en la deteccion delcambio de estado y cualquier eventualidad quepueda suceder en el mundo real donde el robotse ha de desenvolver. Los valores anteriormentemostrados son fruto de una experimentacion y ob-servacion de la precision de los movimientos y enla deteccion de cambios de estado.
El modelo de movimiento p(s′|s, a) queda final-mente definido con el conjunto de estados (quecontiene informacion de vecindad) y la tabla 2.Una matriz nxn, siendo n es numero de estados,se genera a priori para cada accion. Estas matri-
GIzq N: 0.15 G: 0.70 GG: 0.15 GGG: 0.0GDer N: 0.15 G: 0.70 GG: 0.15 GGG: 0.0Avan N: 0.20 A: 0.6 AA: 0.15 AAA: 0.05
Cuadro 2: Incertidumbre en la ejecucion de la ac-cion.
ces representan para cada accion a, p(s′|s), y sonusadas cuando el robot realiza una accion para elcalculo del Bel actualizado.
3.3. Modelo de observacion
Los elementos naturales con los que nos encontra-mos en este entorno son las paredes, las puertas ylas luces del techo. Estas ultimas son utiles ya quepueden dar idea de profundidad en un pasillo. Sise evalua un estado orientado hacia los fondos delpasillo y se detecta una elevada cantidad de lu-ces, indica que el final del pasillo esta lejos, y si sedetectan pocas significa que el robot se encuentracerca del final del pasillo.
Figura 4: Deteccion de 6 luces y 8 puertas en unestado del pasillo alejada del final del mismo.
Figura 5: Deteccion de 1 luz y 5 puertas en unestado del pasillo cercana a la pared.
Las matrices de observacion creadas para cada es-tado en funcion de la observacion que deberıa te-ner p(o|s) soportan que haya errores en la extrac-cion de informacion de las imagenes. Por ejemplo,si un robot en una posicion deberıa detectar 6 lu-ces, no deberıa agruparse la probabilidad solo en6 luces (como en la figura 6) , sino que deberıatenerse en cuenta error en la observacion (figura6).
XXVII Jornadas de Automática
1084 Almería 2006 - ISBN: 84-689-9417-0

Figura 6: p(o|sx) sin tener en cuenta errores en laobservacion si a priori es conocido que o = 6 paras = x.
Figura 7: p(o|s) teniendo en cuenta errores en laobservacion si a priori es conocido que o = 6 paras = x.
4. Aplicacion a la Robocup
El entorno del campo de la Robocup es muy di-ferente al presentado en la seccion 3, y las nece-sidades de localizacion son igualmente diferentes.El metodo propuesto en este artıculo es capaz deadaptarse a este entorno, como mostraremos enesta seccion.
El campo tiene unas dimensiones fijas de5400x3600 mm, y tiene una serie de marcas visua-les que el robot puede usar para localizarse (figura8). El objetivo de los robots es el de marcar golesen la porterıa del equipo contrario. El comporta-miento de los robots es diferente dependiendo delsitio del terreno de juego donde se encuentren, yel rol que esten adoptando en cada momento. Nosolo han de realizar todas sus tareas, incluida la delocalizarse, sino que lo han de hacer con unos tiem-pos de computacion razonables para que el robotcumpla con su labor de una manera adecuada.
4.1. El conjunto de estados
Debido a la flexibilidad del metodo de localiza-cion mostrado aquı, la division de entorno del ro-bot en estados se puede hacer de multiples mane-ras. Podemos dividirlo en un grid regular donde
Figura 8: Campo de juego de la categorıa 4-leggedde la RoboCup
todos las celdas tienen las mismas dimensiones ylos mismos estados para representar la orientaciondel robot (figura 9). Esto satisface las necesidadesde poder estimar metricamente la posicion del ro-bot, que puede necesitar alguna arquitectura decomportamientos en particular. La estimacion essemi directa, y el numero de estados responde aun compromiso entre la precision necesitada y losrecursos computacionales disponibles.
Figura 9: Campo dividido en nodos de la mismadimension. Cada nodo tiene 8 estados separadosde forma uniforme
Otra posibilidad es configurar el espacio de esta-dos dependiendo de las acciones que el robot tengaque hacer en cada zona del campo (figura 10). Porejemplo, un robot en tareas defensivas en la mi-tad de su propio campo no necesita saber nadamas que si esta en la derecha o izquierda del cam-po, y una orientacion aproximada para para lanzarla pelota hacia el campo contrario. Esta decisionnecesita menos precision de localizacion que posi-ciones cerca de la porterıa contraria por parte delos delanteros. La localizacion se orienta hacia eluso que de ella se va a hacer.
4.2. Modelo de movimiento
Al usar una aproximacion tipo grid, el modelo demovimiento usado esta basado en la odometrıa. Serealiza un difuminado de la probabilidad de cadaestado a los cercanos topologicamente, atendiendoa la odometrıa recibida.
XXVII Jornadas de Automática
Almería 2006 - ISBN: 84-689-9417-0 1085

Figura 10: Campo dividido en nodos con distintasdimensiones. Cada tiene un numero diferente deestados, que corresponden a orientaciones arbitra-riamente disenadas para cada nodo
En la figura 11 se puede ver la evolucion delgrid de probabilidad atendiendo a la informacionodometrica. Se observa como se difumina a los es-tados cercanos, para tener en cuenta errores entreel movimiento real y el percibido por el robot.
Figura 11: Modelo de movimiento basado en odo-metrıa. Se observa la influencia de los estados masprobables en sus vecinos.
4.3. Modelo de observacion
La informacion que el robot usa para localizarse esla posicion relativa al robot de las marcas visualesque existen en el campo. Estas marcas son las dosporterıas y las cuatro balizas. El sistema ha de serrobusto a errores en estas observaciones, ya que elrobot esta realizando un movimiento continuo, ylas medidas pueden no ser exactas.
Internamente el robot almacena tres valores paracada marca visual < ρ,Θ, anchor >, donde ρ esla distancia a la marca, Θ es el angulo respecto aleje del robot, y anchor es un valor que nos indicala confianza de esta informacion. Si el anchor eselevado, la informacion se considera correcta y re-ciente; si es bajo, la informacion no es valida. Estevalor de anchor disminuye con el tiempo desde quela informacion de la marca visual es refrescada, ycon la odometrıa.
Para hacer el modelo de observacion tolerante aerrores dentro de nuestro algoritmo, hemos asig-nado a priori la probabilidad de, estando en elestado s, encontrarse con la observacion o. En lafigura 12 se muestra una observacion de una balizaen cierto estado. En ese estado, las probabilidadesde encontrar esa baliza esta dibujado en azul. lap(o|s) depende del angulo con que se percibe labaliza. Si esta en la zona oscura es 1, si esta en laclara, es 0,6, ya que puede haber habido un lige-ro error en la observacion. Si esta en el azul masclaro es 0,3, por haberse producido una error con-siderable, que hay que tener en cuenta. Si esta enotra region se considera improbable obtener esaobservacion en ese estado.
Figura 12: modelo de observacion p(o|s).
5. Experimentos
Para medir el metodo en entorno de interiores, secomparo el estado real del robot con la estimacionmas probable del robot. En el experimento mos-trado en la figura 13 el robot recorre un entornoreal de oficinas del punto 1 al 2. Se ha medido ladistancia en transiciones de estados (pasos) desdela estimacion del robot hasta su posicion real, ylos resultados se muestran en 14.
Los experimentos sobre el campo de la Robocupconsistieron, al no disponer de groundtruth, en co-locar al robot en posiciones aleatorias del terrenode juego y hacer que se dirigiera al centro haciendouso unicamente de la informacion de localizacion,y que permaneciese allı. Los resultados despues devarias pruebas son que la media del error en X es297mm, y en Y es 207mm. La desviacion estandarde cada uno es 45mm y 130mm respectivamente.
XXVII Jornadas de Automática
1086 Almería 2006 - ISBN: 84-689-9417-0

Figura 13: Recorrido del robot en el experimento.
Figura 14: Error en la estimacion de la posicion.
6. Conclusiones
El enfoque topologico ha resultado ser adecuadoen las dos aplicaciones que hemos mostrado en es-te trabajo. Estas aplicaciones han sido abordadas,sobre todo la segunda, con un enfoque metrico.El enfoque topologico ha permitido almacenar lavecindad entre los estados que en la realidad sonadyacentes. Asimismo, ha permitido poder confi-gurar la granularidad de la division del entorno enestos estados, y no siempre esta division puede serregular. La division puede atender a las accionesque un robot puede tomar en cada parte del juego.Hemos mostrado como dividir el entorno en zonasde distinta dimension donde el robot realizarıa ac-ciones identicas.
Las pruebas realizadas muestran que el enfoque escorrecto y funcional en las aplicaciones tomadasen cuenta. Futuras pruebas con groundtruth yun estudio detallado del comportamiento de losrobots, en el caso de la Robocup, aportara unosresultados solidos con los que dar los siguientespasos. Estos pasos irıan encaminados a unaposible configuracion del espacio de estadosdinamicamente en funcion de los roles de losjugadores, precision necesitada en cada momentoy recursos computaciones del robot.
Agradecimientos
Este trabajo ha sido parcialmente financiado porel Ministerio de Ciencia y Tecnologıa, en el pro-yecto ACRACE: DPI2004-07993-C03-01 y la Co-munidad de Madrid en el proyecto RoboCity 2030:S-0505/DPI/0176.
Referencias
[1] P. Buschka, A. Saffiotti, and Z. Wasik. Fuzzylandmark-based localization for a legged ro-bot. In Proc. of the IEEE/RSJ Intl. Conf. onIntelligent Robots and Systems (IROS), pages1205–1210, Takamatsu, Japan, 2000.
[2] Anthony R. Cassandra, Leslie Pack Kael-bling, and James A. Kurien. Acting un-der uncertainty: Discrete bayesian models formobile robot navigation. In Proceedings ofIEEE/RSJ International Conference on In-telligent Robots and Systems, 1996.
[3] C. Estrada, J.Neira, and J.D. Tardos. Hie-rarchical slam: real-time accurate mapping oflarge environments. IEEE Transactions onRobotics, 21(4):588–596, 2005.
[4] Dieter Fox, W. Burgard, H.Kruppa, and Se-bastian Thrun. A monte carlo algorithmfor multi-robot localization. Technical Re-port CMU-CS-99-120, Computer Science De-partment, Carnegie Mellon University, Pitts-burgh, PA, 1999.
[5] Franck Gechter, Vincent Thomas, andFrancois Charpillet. Robot localization bystochastic vision based device. In The 5thWorld Multi-Conference on Systemics, Cy-bernetics and Informatics - SCI 2001 ? The7th International Conference on InformationSystems Analysis and Synthesis - ISAS 2001,Orlando, FL, USA, Jul 2001.
[6] Pablo Guerrero and Javier Ruiz del Solar.Auto-localizacion de un robot movil aibo me-diante el metodo de monte carlo. Anales delInstituto de Ingenieros de Chile, 115(3):91–102, 2003.
[7] D. Herrero-Perez, H. Martınez-Barbera, andA. Saffiotti. Fuzzy self-localization usingnatural features in the four-legged league.In D.Nardi, M. Riedmiller, and C. Sam-mut, editors, RoboCup 2004: Robot SoccerWorld Cup VIII, LNAI. Springer-Verlag, Ber-lin, DE, 2004.
[8] Rudolph Emil Kalman. A new approach to li-near filtering and prediction problems. Tran-sactions of the ASME–Journal of Basic En-gineering, 82(Series D):35–45, 1960.
XXVII Jornadas de Automática
Almería 2006 - ISBN: 84-689-9417-0 1087

[9] Jana Kosecka and Fayin li. Vision basedtopological markov localization. In Procee-dings of the 2004 IEEE International Confe-rence on Robotics and Automation, Barcelona(Spain), April 2004.
[10] Evgeni Kyriy and Martin Buehler. Three-state extended kalman filter for mobile robotlocalization. Technical report, Carnegie Me-llon, 2002.
[11] R. Lastra, P. Vallejos, , and J Ruiz-del So-lar. Integrated self-localization and ball trac-king in the four-legged robot soccer league.In Proceeding of the 1st IEEE Latin Ameri-can Robotics Symposium LARS 2004, MexicoCity (Mexico), Oct 2004.
[12] R. Lastra, P. Vallejos, , and J Ruiz-del So-lar. Self-localization and ball tracking for therobocup 4-legged league. In Proceeding ofthe 2nd IEEE Latin American Robotics Sym-posium LARS 2005, Sao Luis (Brazil), Sept2005.
[13] David G. Lowe. Distinctive image featuresfrom scale-invariant keypoints. Int. J. Com-put. Vision, 60(2):91–110, 2004.
[14] Marıa E. Lopez, Luis Miguel Bergasa, andM.S.Escudero. Visually augmented POMDPfor indoor robot navigation. Applied Infor-matics, pages 183–187, 2003.
[15] Dandapani Radhakrishnan and Illah Nour-bakhsh. Topological localization by traininga vision-based transition detector. In Procee-dings of IROS 1999, volume 1, pages 468 –473, October 1999.
[16] Thomas Rofer and Matthias Jungel. Fast androbust edge-based localization in the sonyfour-legged robot league. In RoboCup, pages262–273, 2003.
[17] Thomas Rofer and Matthias Jungel. Vision-based fast and reactive monte-carlo localiza-tion. In ICRA, pages 856–861, 2003.
[18] Reid Simmons and Sven Koening. Probabi-listic navigation in partially observable envi-ronments. In Proceedings of the 1995 Interna-tional Joint Conference on Artificial Intelli-gence, pages 1080–1087, Montreal (Canada),July 1995.
[19] Mohan Sridharan, Gregory Kuhlmann, andPeter Stone. Practical vision-based mon-te carlo localization on a legged robot. InIEEE International Conference on Roboticsand Automation, April 2005.
[20] S.Thrun. Robotic mapping: A survey. Tech-nical Report CMU-CS-02-111, 2002.
[21] J. Wolf, W. Burgard, and H. Burkhardt. Ro-bust vision-based localization by combiningan image retrieval system with monte carlolocalization. IEEE Transactions on Robotics,21(2):208–216, 2005.
[22] David C.K. Yuen and Bruce A. MacDonald.A comparison between extended kalman filte-ring and sequential monte carlo technique forsimultaneous localisation and map-building.In Proc. Australian Conference on Roboticsand Automation, Auckland, New Zealand,November 2002.
XXVII Jornadas de Automática
1088 Almería 2006 - ISBN: 84-689-9417-0