
7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 1/19
INSTITUTO FEDERAL DO ESPÍRITO SANTO
ENGENHARIA DE CONTROLE E AUTOMAÇÃO
MIGUEL GONÇALVES SCHROEFFER
SEGUNDO PROJETO DE SISTEMAS DE CONTROLE
SERRA
2014
7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 2/19
MIGUEL GONÇALVES SCHROEFFER
SEGUNDO PROJETO DE SISTEMAS DE CONTROLE
Trabalho apresentado à disciplina Sistemas de
Controle do curso de Engenharia de Controle e Automação do Instituto Federal do Espírito
Santo, como requisito parcial de avaliação.
Professor Dr..Saul da Silva Munareto
SERRA
2014
7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 3/19
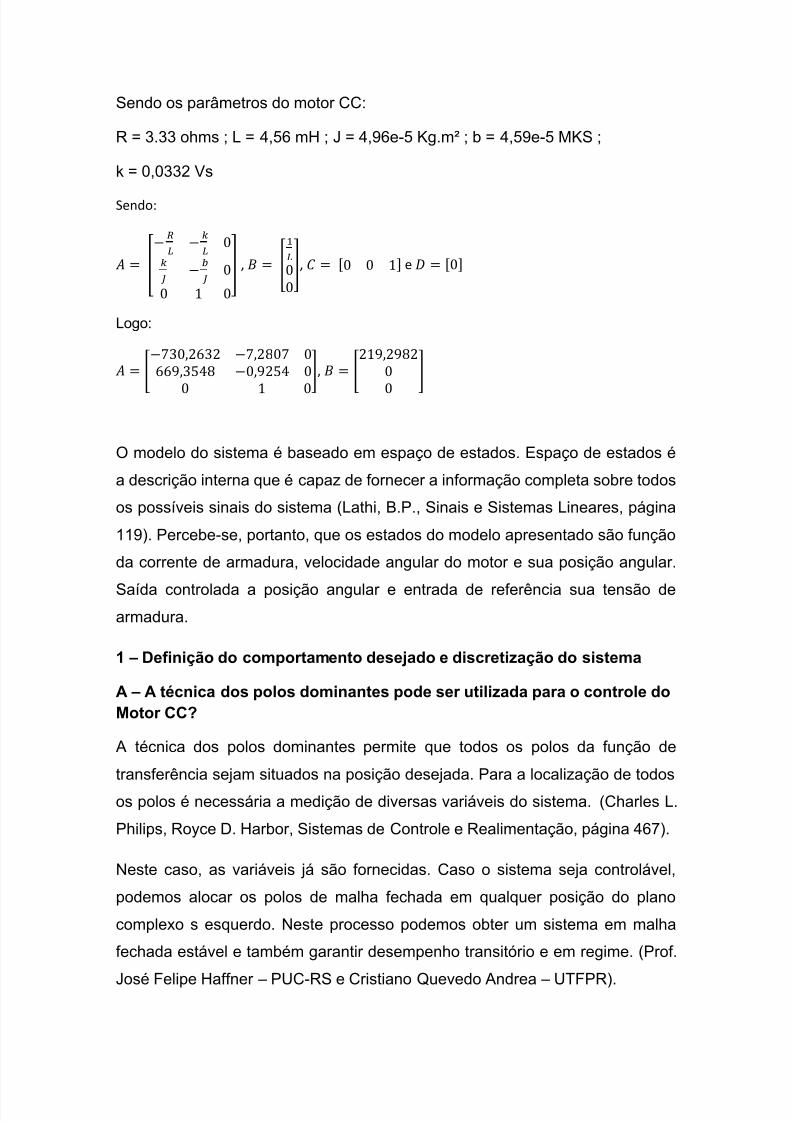
Sendo os parâmetros do motor CC:
R = 3.33 ohms ; L = 4,56 mH ; J = 4,96e-5 Kg.m² ; b = 4,59e-5 MKS ;
k = 0,0332 Vs
Sendo:
, , e
Logo:
,
O modelo do sistema é baseado em espaço de estados. Espaço de estados é
a descrição interna que é capaz de fornecer a informação completa sobre todos
os possíveis sinais do sistema (Lathi, B.P., Sinais e Sistemas Lineares, página
119). Percebe-se, portanto, que os estados do modelo apresentado são função
da corrente de armadura, velocidade angular do motor e sua posição angular.
Saída controlada a posição angular e entrada de referência sua tensão dearmadura.
1 – Definição do comportamento desejado e discretização do sistema
A – A técnica dos polos dominantes pode ser utilizada para o controle doMotor CC?
A técnica dos polos dominantes permite que todos os polos da função de
transferência sejam situados na posição desejada. Para a localização de todos
os polos é necessária a medição de diversas variáveis do sistema. (Charles L.
Philips, Royce D. Harbor, Sistemas de Controle e Realimentação, página 467).
Neste caso, as variáveis já são fornecidas. Caso o sistema seja controlável,
podemos alocar os polos de malha fechada em qualquer posição do plano
complexo s esquerdo. Neste processo podemos obter um sistema em malha
fechada estável e também garantir desempenho transitório e em regime. (Prof.
José Felipe Haffner – PUC-RS e Cristiano Quevedo Andrea – UTFPR).
7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 4/19
Um sistema é dito controlável se for possível encontrar alguma entrada u(t) que
transfira o estado inicial do sistema x(0) para a origem do espaço de estados, , com finito. (Charles L. Philips, Royce D. Harbor, Sistemas de
Controle e Realimentação, página 498).
Controlabilidade é uma função do estado do sistema e não pode ser analisada
a partir de uma função de transferência. (Franklin, Powell, Emani-Naeini,
Sistemas de Controle para Engenharia, página 373).
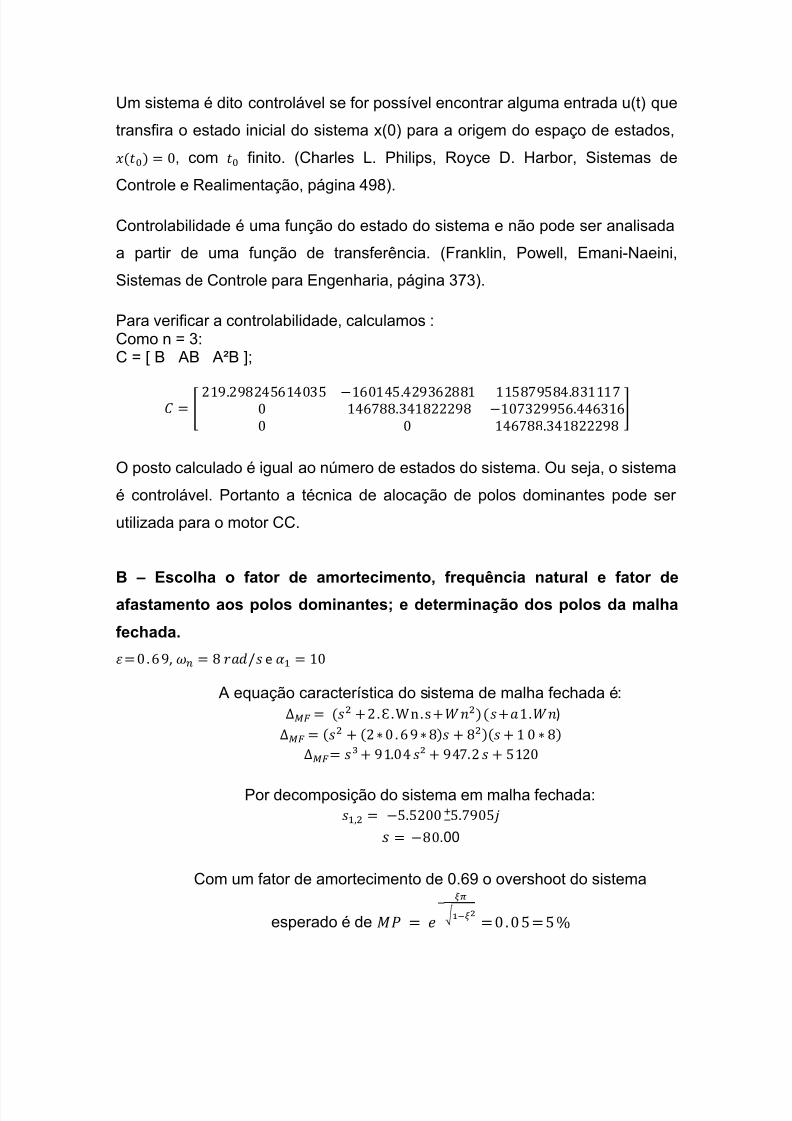
Para verificar a controlabilidade, calculamos :Como n = 3:C = [ B AB A²B ];
O posto calculado é igual ao número de estados do sistema. Ou seja, o sistema
é controlável. Portanto a técnica de alocação de polos dominantes pode ser
utilizada para o motor CC.
B – Escolha o fator de amortecimento, frequência natural e fator de
afastamento aos polos dominantes; e determinação dos polos da malha
fechada. , e
A equação característica do sistema de malha fechada é: )
Por decomposição do sistema em malha fechada: .00
Com um fator de amortecimento de 0.69 o overshoot do sistema
esperado é de

7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 5/19
C - Escolha do tempo de amostragem; discretização dos polos de malha
fechada e determinação do polinômio característico de malha fechada
discretizado.
O tempo de amostragem é calculado da seguinte forma:
√
√ Sendo assim,√ , o tempo de
amostragem deve ser um valor T < 0.1085 s
Escolhendo um valor de N = 15, o tempo de amostragem é igual a √ √ Utilizando os seguintes passos, encontramos o sistema discretizado e os polos
de malha fechada:
Utilizando Matched pole-zero mapping, que corresponde ao método de
discretização do mapeamento de polos e zeros.
fs = tf(conv([1 11.04 64],[1 80]),1)
Transfer function:
s^3 + 91.04 s^2 + 947.2 s + 5120
>> fz = c2d(fs,0.07234,'matched')
Transfer function:2.289e004 z^3 - 2.812e004 z^2 + 1.038e004 z - 31.58
Sampling time: 0.07234
7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 6/19
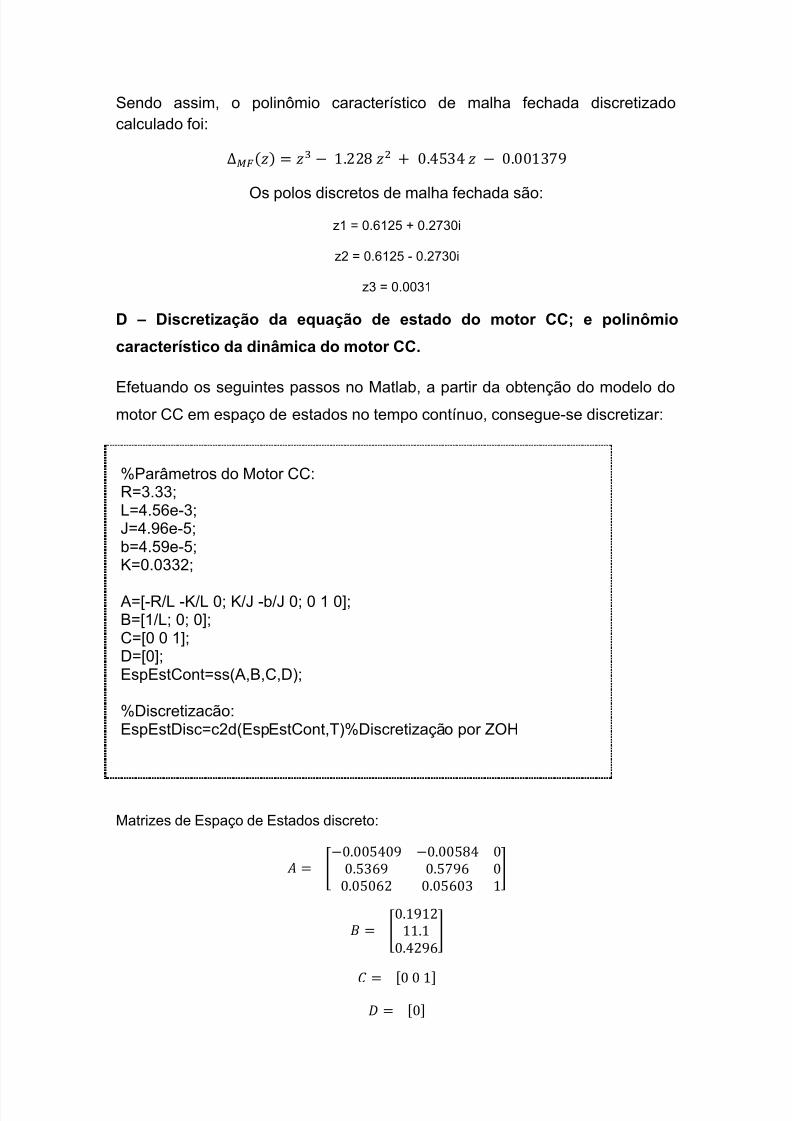
Sendo assim, o polinômio característico de malha fechada discretizadocalculado foi:
Os polos discretos de malha fechada são:z1 = 0.6125 + 0.2730i
z2 = 0.6125 - 0.2730i
z3 = 0.0031
D – Discretização da equação de estado do motor CC; e polinômio
característico da dinâmica do motor CC.
Efetuando os seguintes passos no Matlab, a partir da obtenção do modelo domotor CC em espaço de estados no tempo contínuo, consegue-se discretizar:
%Parâmetros do Motor CC:R=3.33;L=4.56e-3;J=4.96e-5;b=4.59e-5;K=0.0332;
A=[-R/L -K/L 0; K/J -b/J 0; 0 1 0];B=[1/L; 0; 0];C=[0 0 1];D=[0];EspEstCont=ss(A,B,C,D);
%Discretizacão:EspEstDisc=c2d(EspEstCont,T)%Discretização por ZOH
Matrizes de Espaço de Estados discreto:

7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 7/19
Assim:
Transfer function:
z^3 - 1.574 z^2 + 0.5742 z + 4.98e-019
Sampling time: 0.07234
Como o termo independente da equação é praticamente nulo.
O polinômio característico da dinâmica do motor:
E –
Simulações comparando as variáveis de estado contínuas com asdiscretas (simulações em malha aberta); verifique se a discretização está
correta.
Simulação feita no Matlab/Simulink:
Para efeitos da simulação, as matrizes C do sistema contínuo e do discreto,
foram estabelecidas como “eye(3)”, matriz identidade de ordem 3.
Na saída do sistema percebemos todos os estados do motor CC.
7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 8/19
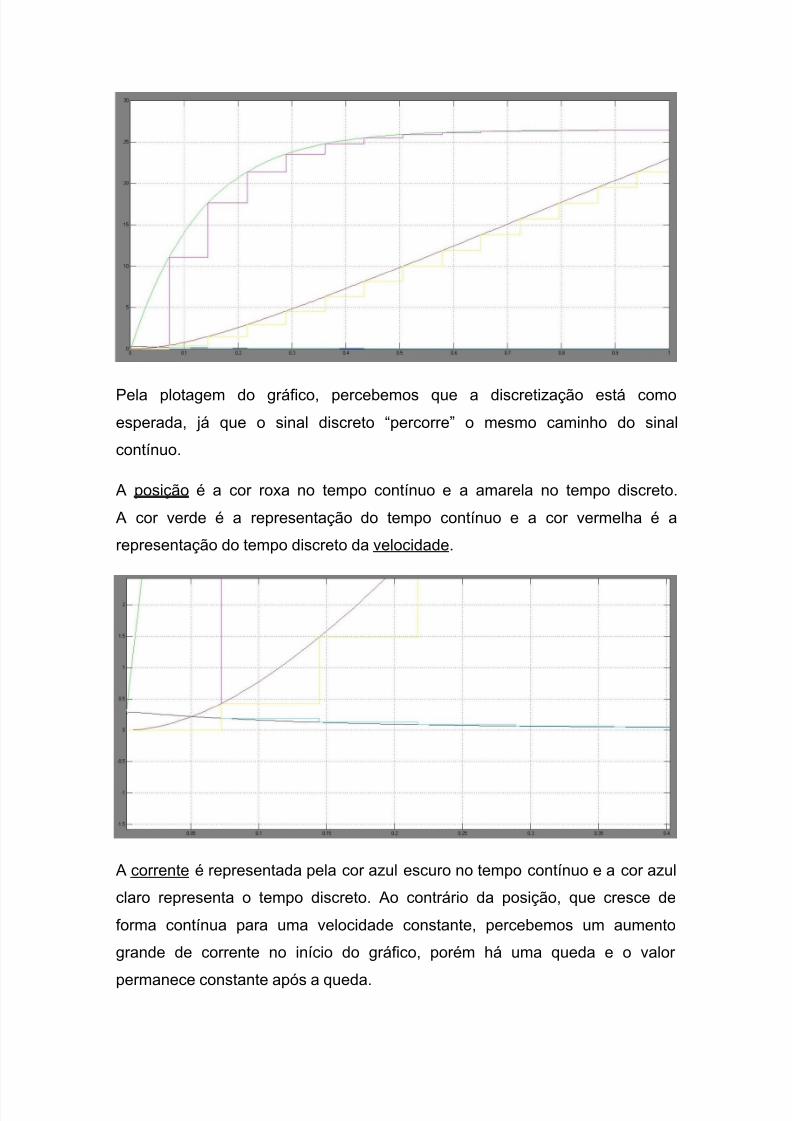
Pela plotagem do gráfico, percebemos que a discretização está comoesperada, já que o sinal discreto “percorre” o mesmo caminho do sinal
contínuo.
A posição é a cor roxa no tempo contínuo e a amarela no tempo discreto.
A cor verde é a representação do tempo contínuo e a cor vermelha é a
representação do tempo discreto da velocidade.
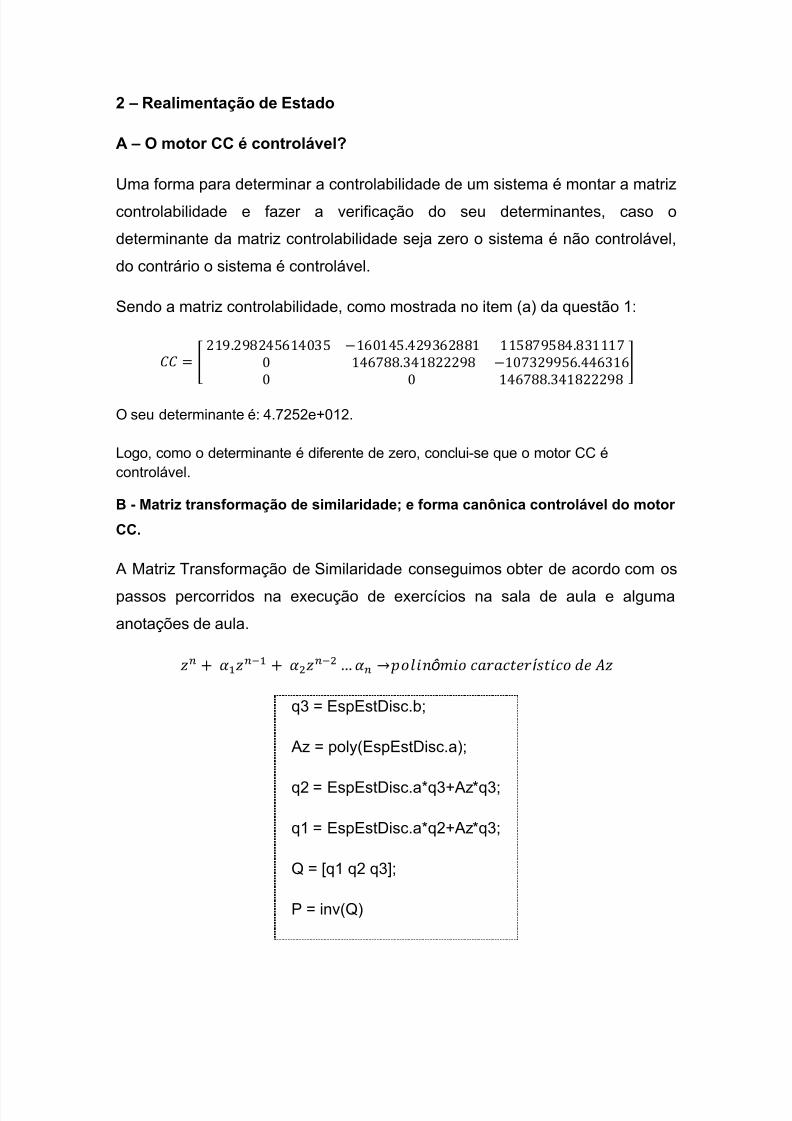
A corrente é representada pela cor azul escuro no tempo contínuo e a cor azul
claro representa o tempo discreto. Ao contrário da posição, que cresce de
forma contínua para uma velocidade constante, percebemos um aumento
grande de corrente no início do gráfico, porém há uma queda e o valor
permanece constante após a queda.
7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 9/19
2 – Realimentação de Estado
A – O motor CC é controlável?
Uma forma para determinar a controlabilidade de um sistema é montar a matriz
controlabilidade e fazer a verificação do seu determinantes, caso o
determinante da matriz controlabilidade seja zero o sistema é não controlável,
do contrário o sistema é controlável.
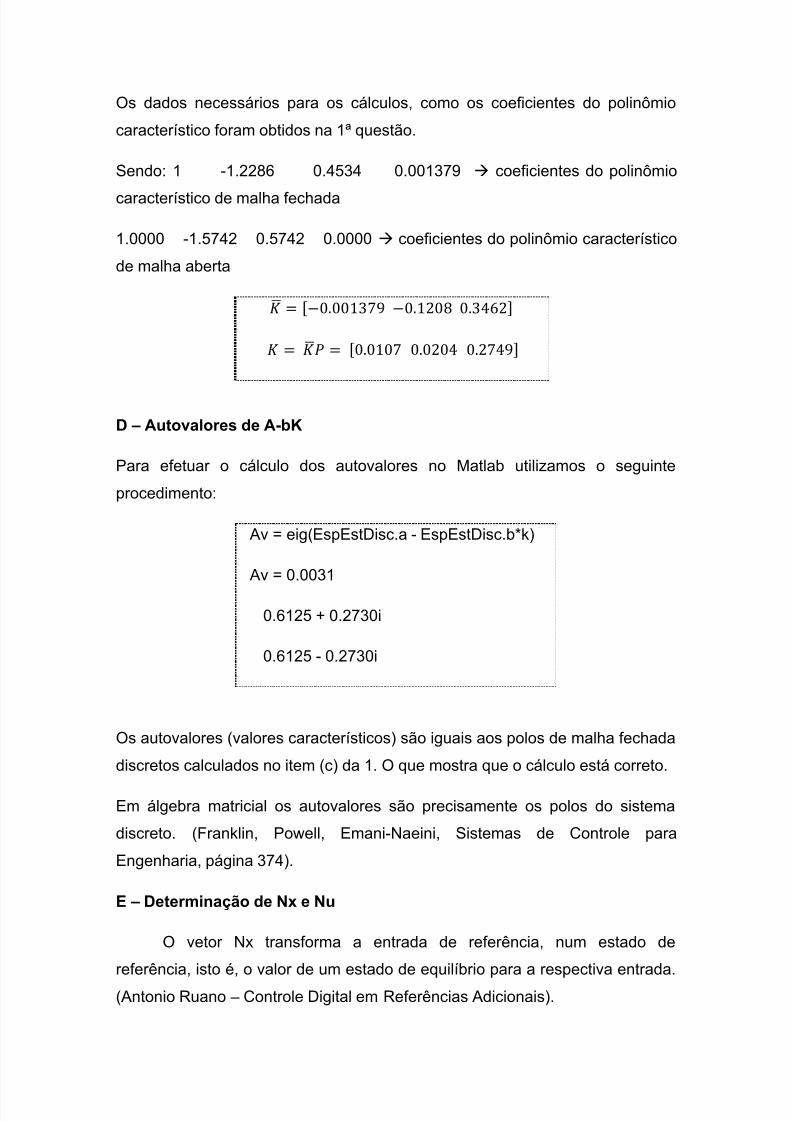
Sendo a matriz controlabilidade, como mostrada no item (a) da questão 1:
O seu determinante é: 4.7252e+012.
Logo, como o determinante é diferente de zero, conclui-se que o motor CC écontrolável.
B - Matriz transformação de similaridade; e forma canônica controlável do motor
CC.
A Matriz Transformação de Similaridade conseguimos obter de acordo com os
passos percorridos na execução de exercícios na sala de aula e alguma
anotações de aula.
q3 = EspEstDisc.b;
Az = poly(EspEstDisc.a);
q2 = EspEstDisc.a*q3+Az*q3;
q1 = EspEstDisc.a*q2+Az*q3;
Q = [q1 q2 q3];
P = inv(Q)

7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 10/19
Matriz de Transformação de Similaridade:
As matrizes na forma canônica controlável do motor CC serão obtidas daseguinte forma, sendo:
̅ ; ̅
Abarra = P* EspEstDisc.a*Q;Bbarra = P* EspEstDisc.b;
Cbarra = EspEstDisc.c*Q;
Os resultados obtidos são:
̅ ̅ C – Determinação dos vetores de ganhos de realimentação Kbarra e K.
Sendo o polinômio característico desejado para o sistema em malha fechada
definido por:
Polinômio característico de malha aberta: O ganho de realimentação K é o produto da matriz com a Matriz de
Transformação de Similaridade P.
7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 11/19
Os dados necessários para os cálculos, como os coeficientes do polinômio
característico foram obtidos na 1ª questão.
Sendo: 1 -1.2286 0.4534 0.001379 coeficientes do polinômio
característico de malha fechada
1.0000 -1.5742 0.5742 0.0000 coeficientes do polinômio característico
de malha aberta
D – Autovalores de A-bK
Para efetuar o cálculo dos autovalores no Matlab utilizamos o seguinte
procedimento:
Av = eig(EspEstDisc.a - EspEstDisc.b*k)
Av = 0.0031
0.6125 + 0.2730i
0.6125 - 0.2730i
Os autovalores (valores característicos) são iguais aos polos de malha fechada
discretos calculados no item (c) da 1. O que mostra que o cálculo está correto.
Em álgebra matricial os autovalores são precisamente os polos do sistema
discreto. (Franklin, Powell, Emani-Naeini, Sistemas de Controle para
Engenharia, página 374).
E – Determinação de Nx e Nu
O vetor Nx transforma a entrada de referência, num estado de
referência, isto é, o valor de um estado de equilíbrio para a respectiva entrada.
(Antonio Ruano – Controle Digital em Referências Adicionais).
7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 12/19
Nx e Nu são obtidos a partir da seguinte relação: No Matlab, conseguimos calcular as matrizes da seguinte forma:
N = inv([EspEstDisc.a-eye(3) EspEstDisc.b; EspEstDisc.c 0])*[0;0;0;1]
N = 0.0000; 0.0000; 1.0000; 0.0000
>> Nx = [N(1);N(2);N(3)]
Nx = 0.0000; 0.0000; 1.0000
>> Nu = N(4)
Nu = 9.2830e-016
Nu é praticamente zero.
;
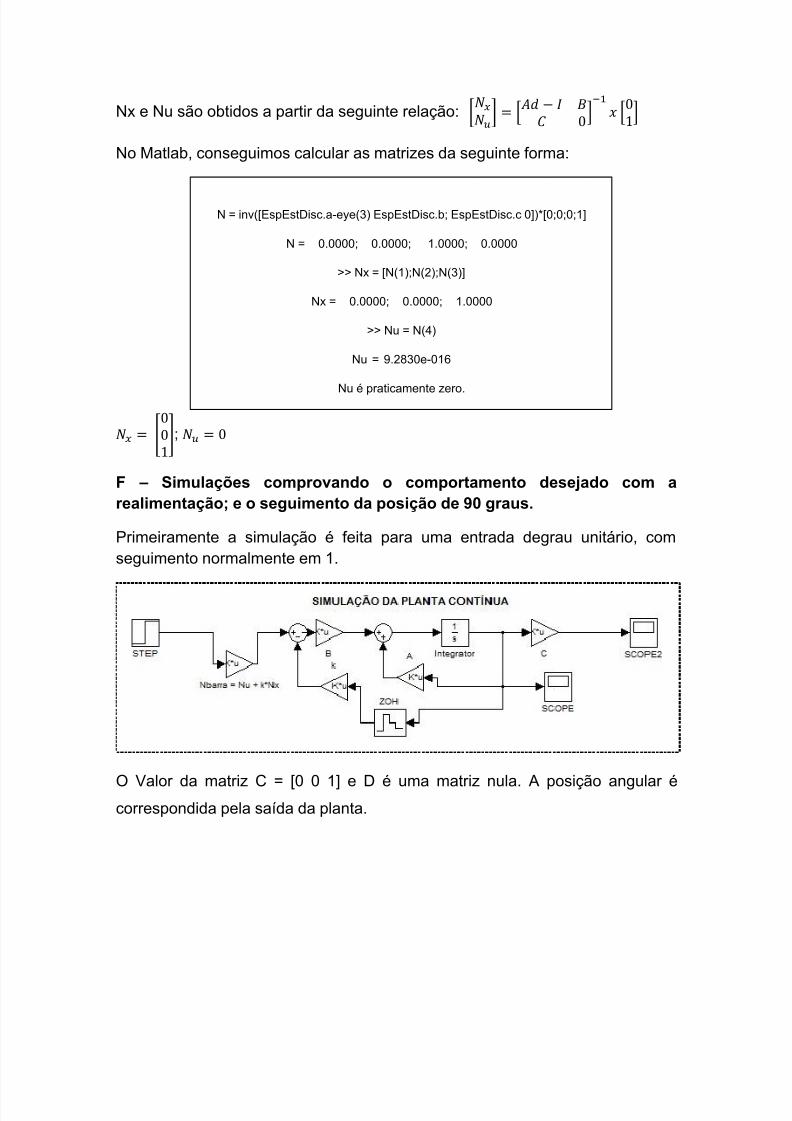
F – Simulações comprovando o comportamento desejado com arealimentação; e o seguimento da posição de 90 graus.
Primeiramente a simulação é feita para uma entrada degrau unitário, comseguimento normalmente em 1.
O Valor da matriz C = [0 0 1] e D é uma matriz nula. A posição angular écorrespondida pela saída da planta.

7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 13/19
Os gráficos demonstram que pelo fato de o coefiente de amortecimento ser
igual a 0.69, o overshoot ou sobressinal máximo será igual a 5%. No modelo de
simulação de diagrama de blocos é utilizado um ganho Nu+k*Nx, ganho este
chamado de Nbarra. Comprova-se pelos gráficos que realmente utilizando um
ganho K e com o ganho Nbarra, ambos na entrada, o sistema realimentado,
segue realmente a referência.

7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 14/19
A mesma simulação com planta contínua foi feita para um seguimento daposição em 90 graus. Seguindo a referência em pi/2, o que equivale a
aproximadamente 1.57.
É percebida pela plotagem do gráfico uma estabilidade no sistema. Assim
como a estabilização também foi cumprida, já que a entrada do sistema foi ,
o valor esperado foi é de 1,57 que é o esperado e visto no gráfico.

7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 15/19
G – Utilização do Controle Integral para compensar um distúrbio detorque do tipo degrau com amplitude 0.01.
3 – Observador de ordem completa
A – O motor CC é observável?Observabilidade Um sistema é completamente observável se e somente se
existe um tempo finito T tal que o estado inicial x(0) pode ser determinado a
partir do histórico de observações de y(t) dado o controle u(t), 0 t T.
Considerando o sistema com entrada única e saída única:
̇
(Dorf, Sistemas de Controle Modernos, pág. 545)
Devemos verificar o seu determinante. Caso o determinante seja zero, o
sistema é não observável, caso tenha alguma valor diferente de zero, o sistema
é observável.
O = [C; C*A;C*A^2];
Det(O) = -669.3548.
Como o determinante é diferente de zero, logo o sistema é observável.
B – Escolha do fator de rapidez do observador; e polos do observador.
O fator de rapidez do observador está relacionado com a rapidez da dinâmica
do sistema. O fator de rapidez escolhido foi a0 = 4;
Para determinação dos polos do observador, no matlab foram seguidos os
seguintes passos, encontramos a equação característica e logo após os polos:
function = tf(conv[1 2*E*a0*wn (a0*wn)^2],[1 a1*a0*wn] ), 1);
function = tf(conv[1 2*0.69*8*4 (4*8)^2],[1 10*4*8]),1);
Transfer function:

7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 16/19
s^3 + 364.2 s^2 + 1.516e004 s + 327680
Polos do observador:
S1 = -320.03 ; S2 = -22.09 + 23.15i ; s3 = -22.09 – 23.15i
C – Discretização dos polos do observador e determinação do polinômio
característico discretizado.
Os polos do observador utilizando o método de mapeamento de polos e zeros
são os seguintes:
fz = c2d(function,0.07234,’matched’)
Transfer function:
3.025e005 z^3 + 1.28e004 z^2 + 1.24e004 z - 1.096e-006
S1 = -0.0212 + 0.2013i ; s2 = -0.0212 - 0.2013i; s3 = 0
Para conseguirmos obter a equação característica, existe um comando no
matlab denominado poly():
z^3 + 0.04233 z^2 + 0.04099 z - 3.624e-012
Equação característica
D – Matriz transformação de similaridade; e forma canônica observável do
motor CC.
Com o método utilizado na questão 1. O polinômio característico de Az é da
seguinte forma:

7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 17/19
[
]
Utilizando o matlab para efetuar os cálculos, faz-se:
P1 = [0.5742 -1.5742 1; -1.5742 1 0; 1 0 0]*obsv(EspEstDisc)
A forma canônica controlável consegue-se obter por:
[n,d] = ss2tf(EspEstDisc.a, EspEstDisc.b, EspEstDisc.c, EspEstDisc.d);
Ac = [0 0 –d(4); 1 0 –d(3); 0 1 –d(2)]
Bc = [n(4); n(3); n(2)]
Cc = [0 0 1]
Dc = [n(1)]

7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 18/19
E – Determinação dos vetores de ganhos e L .
Para obtenção dos vetores de ganhos
e L, utilizamos os coeficientes da
equação discretizada característica do observador () e os coeficientes da
equação característica do motor (. Com a posse desses coeficientes,
conseguimos obter transposto e por conseguinte e L.
Sendo o polinômio característico de A dado por:
Obtemos da seguinte forma efetuando os cálculos no matlab:
Lbarrat = [(-3.6244e-012 - 4.9802e-019) (0.0410 - 0.5742) (0.0423 +1.5742)]
Lbarra = Lbarrat’
L = inv(P1)*Lbarra
F – Autovalores de A – LC.
Conseguimos da seguinte forma calcularmos os autovalores de A-LC
ALC = eig(EspEstDisc.a – L*EspEstDisc.c);
ALC = 0.0000
-0.0212 + 0.2013i
-0.0212 - 0.2013i
Para confirmarmos a validade dos cálculos, verificamos que os autovalores de
(A – LC) coincidem com as raízes do polinômio característico desejado.
Verificamos na letra ( c ) da questão [3].
7/22/2019 2º Trabalho de Sistemas de Controle
http://slidepdf.com/reader/full/2o-trabalho-de-sistemas-de-controle 19/19
G – Simulações comparando os estados do observador com os estados
do motor CC em condições iniciais nulas e em condições iniciais
diferentes de zero.
H – Simulações da realimentação usando estados do observador; eusando estados do observador com seguimento de referência 90 graus.
Use Nx e Nu do item 2.
I – Utilização do estimador de bias para compensar um distúrbio de
torque do tipo degrau com amplitude 0.01.
4 – Observador de ordem (n-1)
Em projetos de sistemas de controle em que se torna necessária a
realimentação de estados, é desejável que todas as variáveis de estado
estejam disponíveis para realimentação. Na prática, porém, pode ocorrer que
nem todas as variáveis de estado estejam disponíveis, sendo necessária a
utilização de um sistema conhecido como observador de estados, capaz de
estimar as variáveis de estado de forma indireta do modelo estudado ( OGATA,
2002).
Observador de estados de ordem reduzida onde o observador de
estados irá apenas estimar as variáveis de estado não mensuráveis do
sistema, dispensando a estimação das variáveis que permitem a medição
direta.
REFERÊNCIAS ADICIONAIS
Antonio Ruano – Controle Digital
http://intranet.deei.fct.ualg.pt/ContD/Apontamentos%20Controlo%20Digital.pdf
Recommended

















