Copyright © 2009 DCA-FEEC-UNICAMP
Análise da Arquitetura Baars-Franklin de Consciência Artificial Aplicada a uma Criatura Virtual
Ricardo Capitanio M. SilvaOrientador: Ricardo R. Gudwin
DCA-FEEC-UNICAMP
15/07/2009

Roteiro
Introdução Motivação Teorias gerais de consciência
Teoria do workspace global (Baars) Consciência artificial
Arquitetura Baars-Franklin Experimento Análises Considerações finais

Introdução
Crescimento nas pesquisas Tema em estágio pré-paradigmático Existem diferentes abordagens
Teorias de consciência Consciência Artificial
• Entendimento ingênuo da consciência
Arquitetura Baars-Franklin

CMattie: Primeiro Agente “Consciente”
Agendamento de seminários Reserva de salas Anúncio dos eventos da próxima semana
Comunicação por email Linguagem natural
CMattie
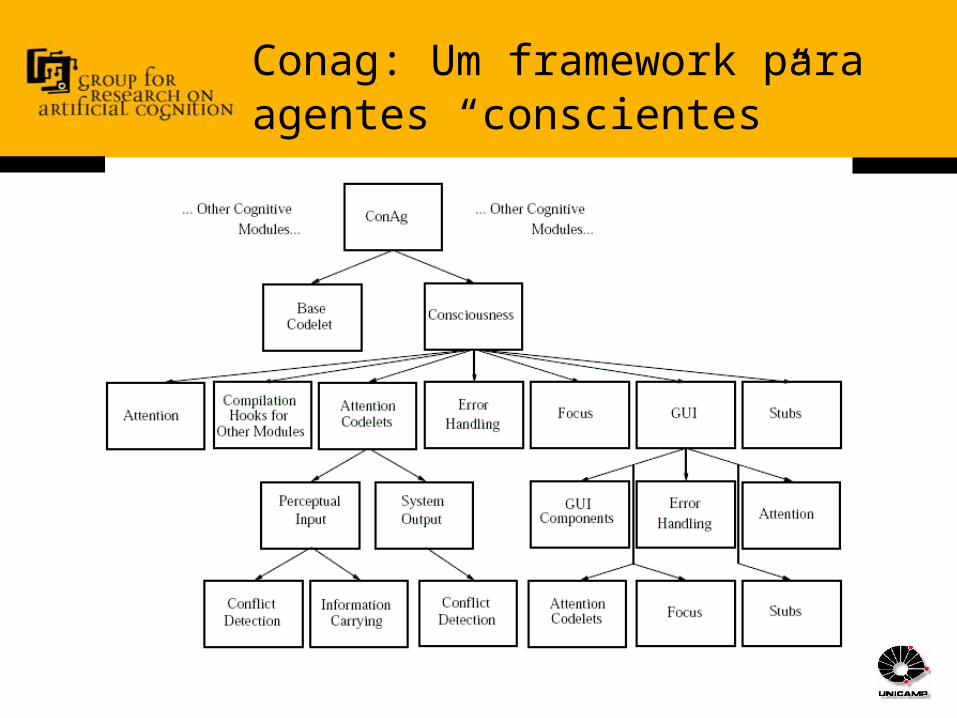
Conag: Um framework para agentes “conscientes”

IDA: Intelligent Distribution Agent
Lê dados de pessoal Verifica a lista de
requisição de trabalhos Segue as políticas da
Marinha Negocia com as os
marinheiros as atribuições Email
CTS: Conscious Tutoring System
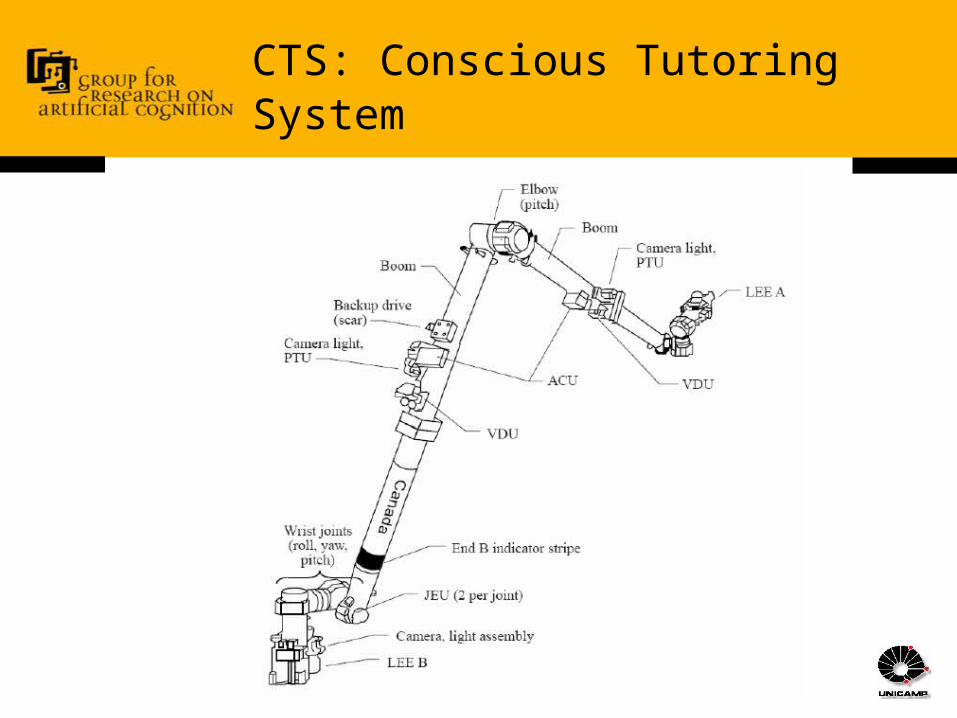
CTS: Conscious Tutoring System

CTS: Conscious Tutoring System
CTS: Conscious Tutoring System

Por que estudar Consciência Artificial?
Vantagens: Seres humanos (Koch 2004)
• Sumário Executivo• Automatização
Sistemas inteligentes (Sanz et al. 2007)• Artefatos mais parecidos com seres humanos• Estudos de sistemas naturais• Máquinas mais eficazes

Objetivos do trabalho
Estudar as abordagens mais relevantes de consciência e de consciência artificial
Levantar as principais implementações existentes Verificar as vantagens e desvantagens do uso da
tecnologia Baars-Franklin Implementação de um agente

Teorias de Consciência
Block Conceito híbrido P/A/M/S-Consciência
Edelman Primeiro e segundo repertórios Mapas reentrante
Dennett máquina virtual do tipo Von Neumann (serial)
implementada no cérebro, uma arquitetura paralela. Baars
Teoria do Workspace Global

Teoria do Workspace Global
Pontos convergentes com outras teorias Principais componentes:
Processadores especializados Coalizões Contextos Workspace Global
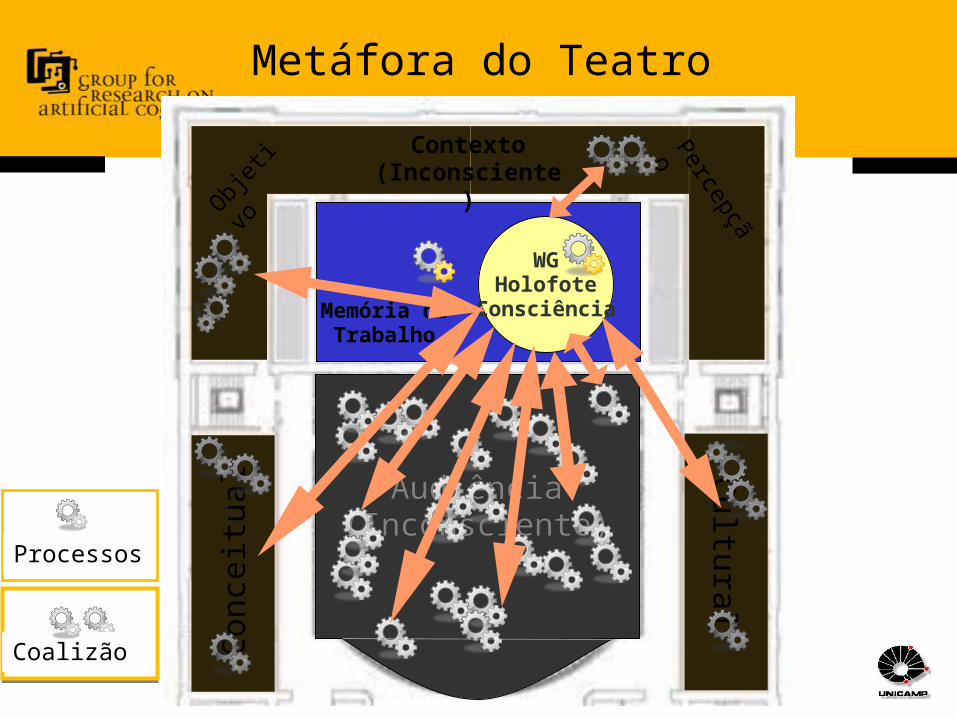
Metáfora do Teatro Interativo
Memória de
Trabalho
WGHolofote
Consciência
Audiência(Inconsciente)
Contexto(Inconsciente)
Audiência(Inconsciente)
Processos
Coalizão
Con
ceit
ual C
ultu
ral
Percepçã
o
Objet
ivo

Consciência Artificial
Junichi Takeno (Japão) Robôs autoconsciente
Antonio Chella (Itália) Cicerobot
Owen Holland (Inglaterra) Cronos
Ron Sun (EUA) Clarion
Pentti Haikonen (Finlândia) Sistema Cognitivo Neural
Stan Franklin (EUA) CMattie/Conag/IDA/LIDA

Arquitetura Baars-Franklin
Processadores Especializados – Codelets Contextos – Coalizões Teatro
Palco: codelets ativos Bastidores e Plateia: codelets inativos

Teorias Precursoras
Arquitetura Copycat – Hofstadter Rede de Comportamentos – Maes Memória Sparsamente Distribuída –
Kanerva Teoria do Pandemônio – Selfridge / Jackson Teoria do Workspace Global - Baars

Arquitetura Baars-Franklin

Rede de Comportamentos
Maes 1989 (Negatu 2006)

Mecanismo de Consciência

Ciclo cognitivo
9 etapas 1-3 “inconsciente” 4-9 interação entre consciência e rede de
comportamentos Facilita a implementação, sem prejudicar as ideias
anteriores
Ciclo cognitivo, dividido em 9 etapas
1. Percepção
2. Percepto no buffer pré-consciente
3. Associações Locais
4. Competição pela consciência
5. Broadcast Consciente
6. Recrutamento de recursos
7. Configurando a hierarquia de contextos de objetivos
8. Escolha da ação
9. Realização da ação

Nosso Experimento
Tentativa de criar um partindo somente da literatura Artigos e teses (Bogner 1999, Negatu 2006 e Dubois
2007). Dificuldades na geração do código
Convênio com Universidade de Memphis Conag (Bogner 1999) Rede de Comportamentos (D' Mello)
Criatura virtual Problema de navegação Adaptações nos módulos de Memphis Criação de codelets
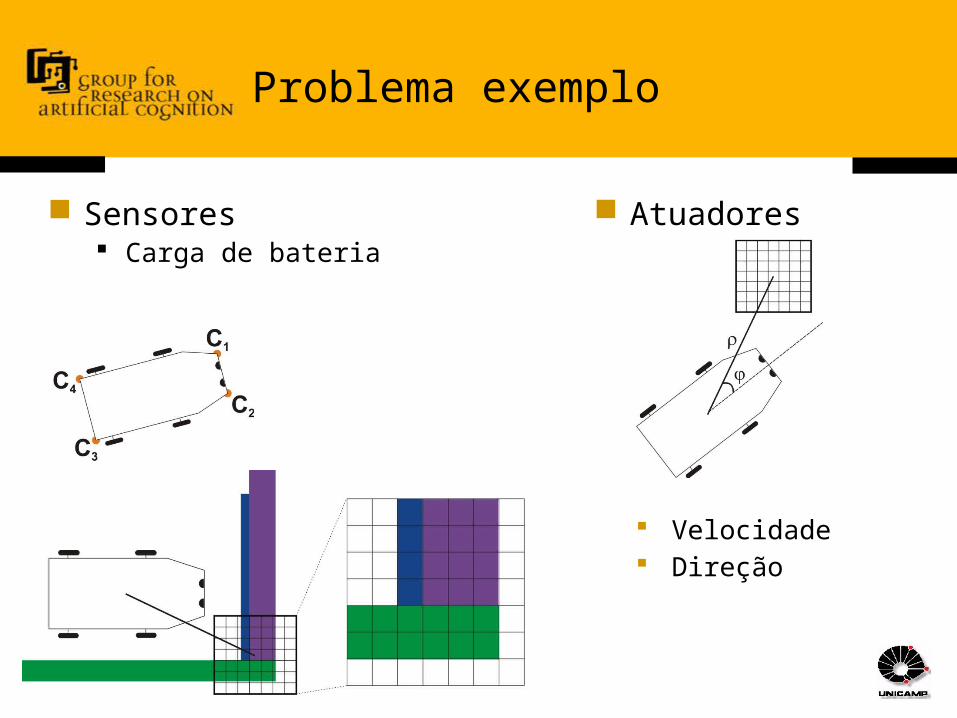
Problema exemplo
Sensores Carga de bateria
Atuadores
Velocidade Direção

Arquitetura Cliente-Servidor

Simulador (Ambiente 2D)
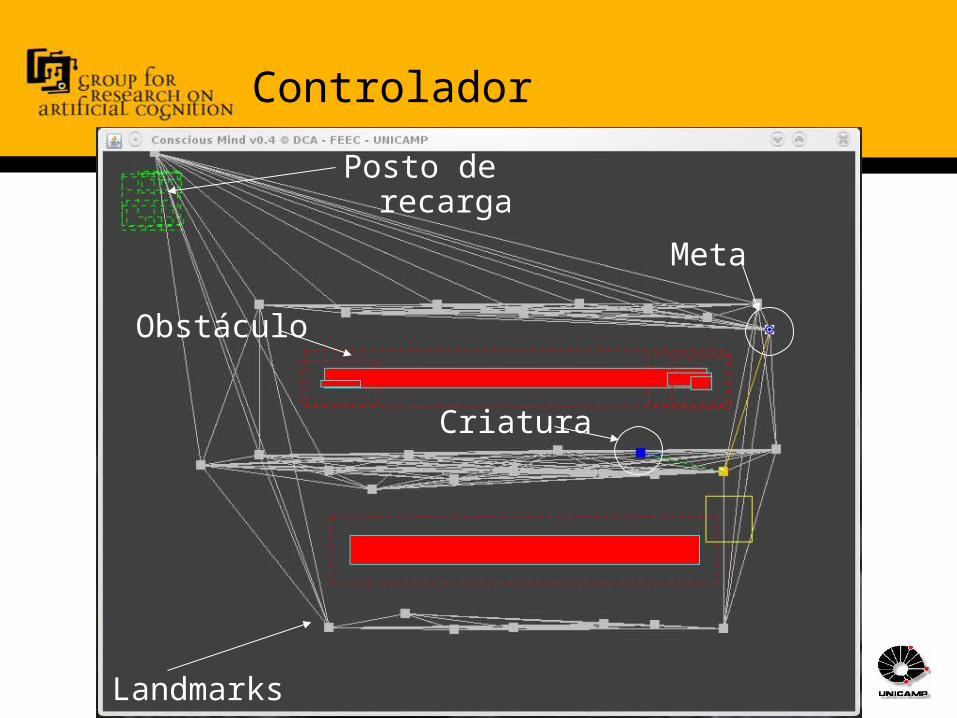
Controlador
Posto de recarga
Landmarks
Obstáculo
Criatura
Meta

Laboratório

CAV
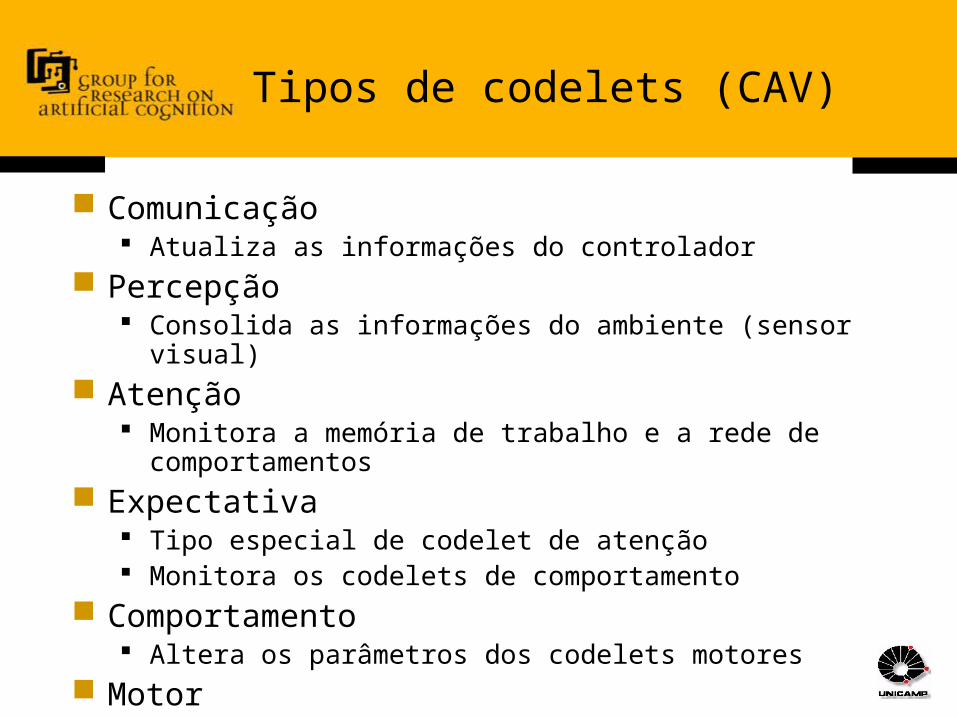
Tipos de codelets (CAV)
Comunicação Atualiza as informações do controlador
Percepção Consolida as informações do ambiente (sensor visual)
Atenção Monitora a memória de trabalho e a rede de
comportamentos Expectativa
Tipo especial de codelet de atenção Monitora os codelets de comportamento
Comportamento Altera os parâmetros dos codelets motores
Motor Gera o comportamento pelas ações nos atuadores

CAV
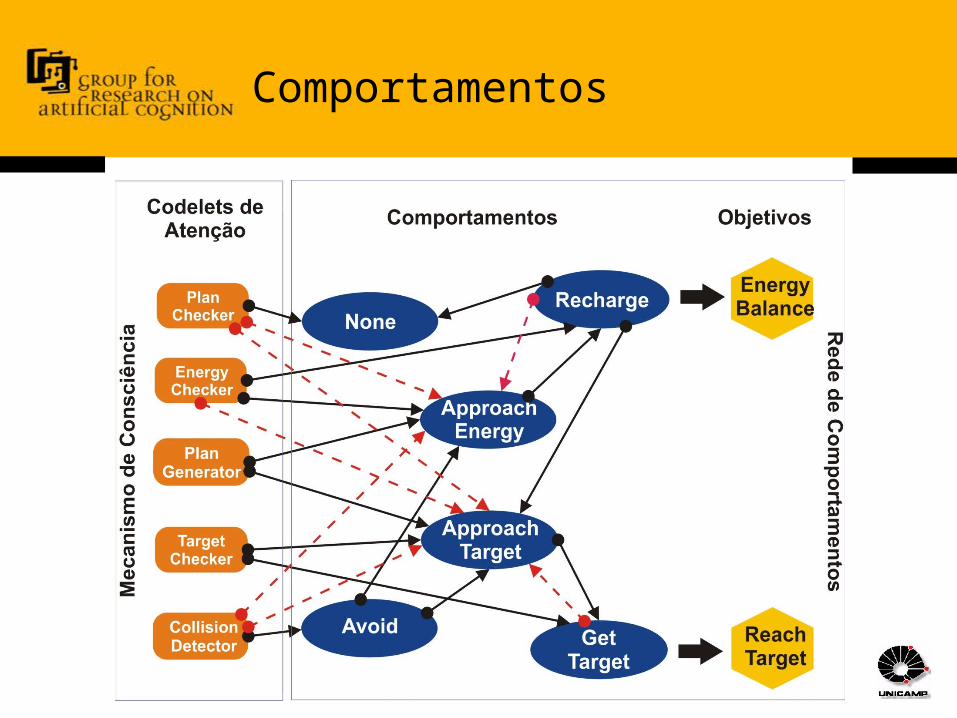
Comportamentos

Transferência de Ativação

Cadeias de Comportamentos

Ciclo de CAV (5 etapas)
1. Percepção
2. Percepto no buffer pré-consciente
3. Associações Locais
4. Competição pela consciência
5. Broadcast Consciente
6. Recrutamento de recursos
7. Configuração da hierarquia de contextos de objetivos
8. Escolha da ação
9. Realização da ação

Ciclo de CAV (5 etapas)
1. Competição pela consciência
2. Broadcast Consciente
3. Configuração da hierarquia de contextos de objetivos
4. Escolha da ação
5. Realização da ação

Sensor Visual
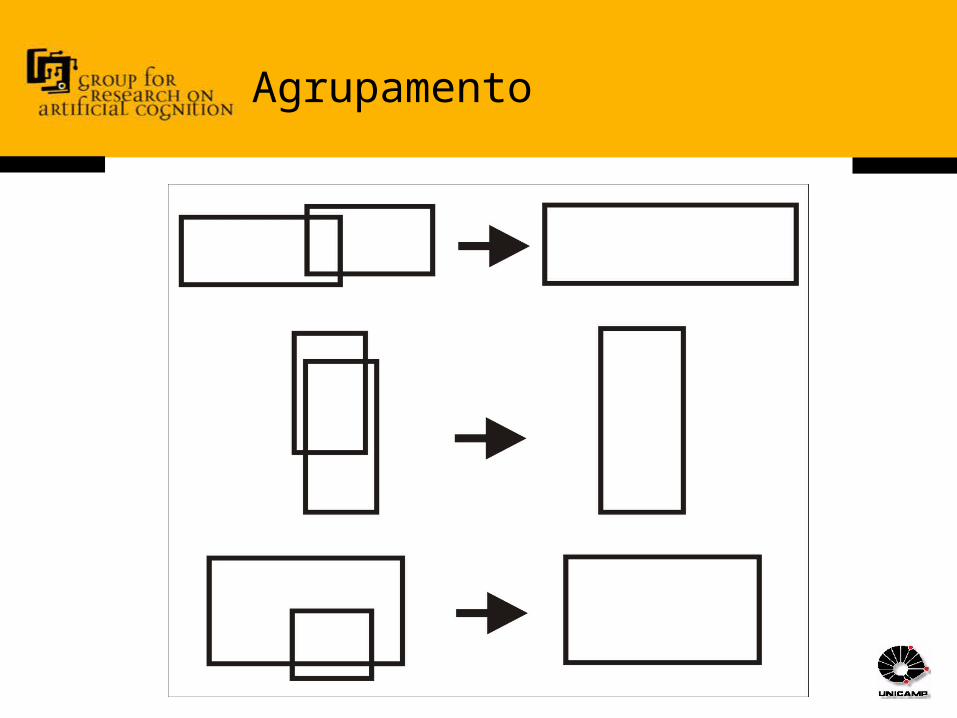
Agrupamento

Armazenamento

Geração de Caminhos

Demonstração
Clique aqui para ver no You Tube

Análise mecanismo de consciência
Primeiro minuto de um experimento Threads ativas Número de codelets Codelet consciente
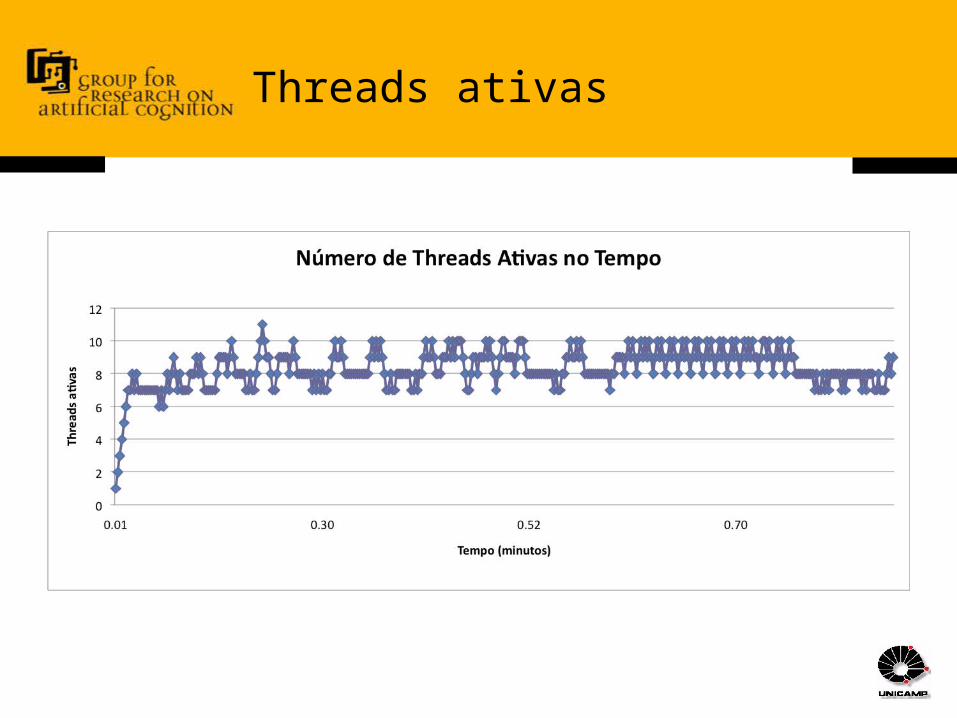
Threads ativas

Codelets em campo

Codelet consciente
1 – Plan Generator 2 – Obstacle Recorder 3 – Target Carrier 4 – Collision Detector 5 – Path checker 6 – Energy Checker
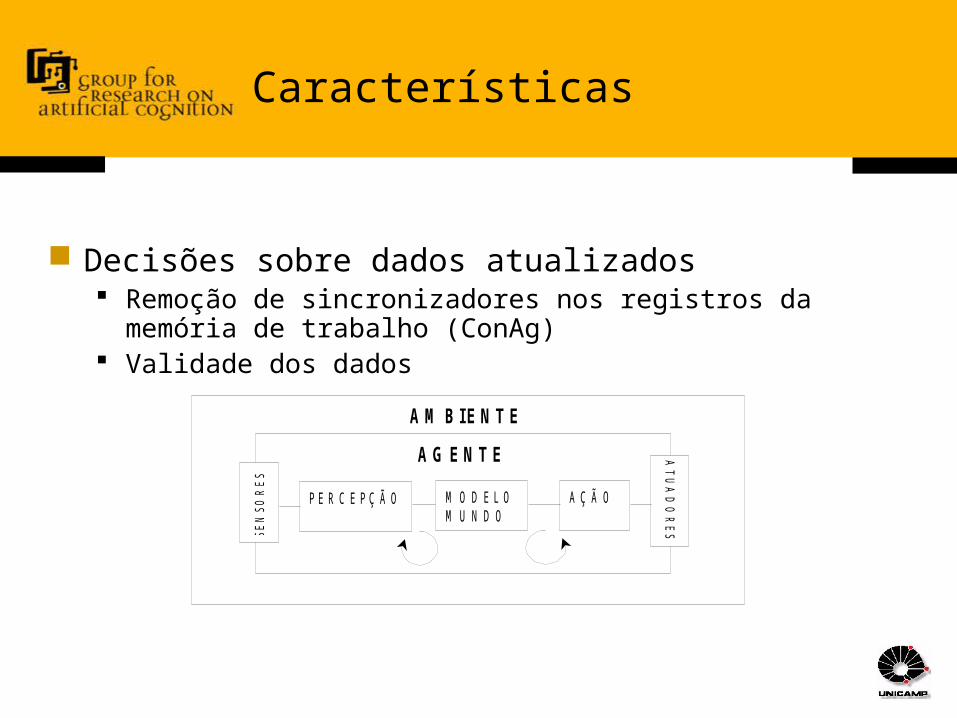
Características
Decisões sobre dados atualizados Remoção de sincronizadores nos registros da memória de
trabalho (ConAg) Validade dos dados
AM BIENTE
AG ENTE
P E R C E P Ç Ã O
SEN
SOR
ES
AT
UA
DO
RE
S
A Ç Ã OM O D E L OM U N D O

Características
Sumário Executivo Filtro para a percepção

Características
Processamento paralelo x serial ABF como instância da ideia de Dennet

Considerações Finais
Contribuições Estudo das abordagens de teorias de consciência e de consciência artificial Refinamentos no simulador 2D Desenvolvimento de um agente utilizando a ABF Esclarecimento da arquitetura
• Uso, importância, vantagens
Limitações Formalização da teoria Protótipo Comportamentos com escopo restrito

Considerações Finais
Trabalhos Futuros Melhorias do ambiente de simulação Adição de outros mecanismos da ABF ao agente Formalização da teoria
• Rede de processamento de recursos – RP-Net Mecanismo de aprendizado de novos comportamentos Uso de outros mecanismos de seleção de ação,
• e.g.: (Dorer 1999)
Bibliografia
Bogner, Myles Brandon. 1999 (December). Realizing "Consciousness" in Software Agents. Ph.D. thesis, The University of Memphis.
Dubois, Daniel. 2007a (August). Constructing an agent equipped with an artificial consciousness: application to an intel ligent tutoring system. Ph.D. thesis, Université du Québec à Montréal.
Negatu, Aregahegn Seifu. 2006 (August). Cognitively Inspired Decision Making for Software Agents: Integrated Mechanisms for Action Selection, Expectation, Au- tomatization and Non-Routine Problem Solving. Ph.D. thesis, The University of Memphis
Tese + 150 referências
Recommended