-
8/3/2019 Den Gel Em Erg
1/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
1
m=sistemin ktlesi
om
Fdin
kama yuvas
2)
1) mk
G
Rijit dst=0
Kons. el.
mk:dengesizliioluturan ktle(kama yuvasnnarl)
n
Fdin=mk
Elastik dst0
DENGELEME1.) Ktle dengelemesi (Rotor)2.) Periyodik evrimli
makinalarn dengelenmesi (Krank-Biyel)3.) G dengelenmesi (Volan)
1.) Ktle Dengelenmesi :Makine mhendisliinde btn dnen makine
paralarnn adna rotor denilmektedir. rnein;miller, dili arklar,
kasnaklar vs. Btn bu elemanlarn dnme ekseni ile arlk
merkezindengeen eksenin akmas gerekir. Aksi takdirde dnme hzlar
arttka ktle atalet kuvvetleri(merkezka kuvvetleri, santrifj
kuvvetleri) ve bunlarn meydana getirecekleri eilmemomentleri ile
dnme momentleri konstrksiyon iin byk problemler olutururlar.
Bundandolay, rotorlarn dnme ekseni ile arlk merkezinden geen
eksenin akmasnsalayabilmek iin ktle atalet kuvvetlerinin
dengelenmesi gerekmektedir.
Rotorlar iki snfa ayrlr :
1.) Rijit Rotor : Dnme hareketi esnasnda hibir deformasyon
yapmad kabul edilir.2.) Elastik Rotor : Dnme hareketi esnasnda azda
olsa zerinde deformasyonlarn olutuukabul edilen rotor.
2
din kF m=
Eksen kakl
-
8/3/2019 Den Gel Em Erg
2/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
2
L1
Fdin=mk
A
Fden=mdd
L2
B
Fiziksel Model
kuvvet)(santrifj.... 22 emmFdin ==
==e eksen kakl=.m dengelenmemi byklk
( )snrad30.n
==
Arlk merkezi kaydndan dolay bu rotor zerinde dengesizlik meydana
gelecektir.Dolaysyla bu dengelenmemi bykln bir dengeleme bykl ile
dengelenmesigerekmektedir.
=ddm . dengeleme bykl
( ) ( ) ( ) ( )ddkddk
dindindendin
din
mmmm
BAFF
FBA
......
022 ==
===
=+
Pratikte dnen elemanlarn meydana getirdikleri ktle atalet
kuvvetleri, yataklarda dinamikkuvvet olarak ortaya kacaktr. Bu
durumda, yatak kuvvetlerini sfr ( 0== dindin BA )
yapabildiimiz takdirde ideal (en mkemmel) dengeleme yaplm
olacaktr.
00 == dindin BA
33m
22m
11m
44m
A B
-
8/3/2019 Den Gel Em Erg
3/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
3
G
o
Rotorlarn dengelenmesi sonucunda dengeleyemediimiz kalc artk
ktle atalet kuvvetleriolacaktr. Bu durumda, standartlar atalet
kuvvetlerinin dourduu titreimlerin hzlarnnsnrlarn belirlemitir. Bu
hz snr aada verilmitir.
Titreim hz ( ) .mm/s. ==dt
dxe
Rotor Titreim Hz ( .e )
Otomobil tekerlei 40 mm/sSantrifj pompa 6,5 mm/sUak tahrik sist.
rotoru 2,5 mm /sTalama tezgah mili 0,4 mm/s
I.) Statik Dengeleme ( 0Mve0F = )
Dengelenmemi .m bykln dengelemek iin karsna ayn dorultuda ddm
.
dengeleme bykln yerletirmek ve bylece dengelemeyi gerekletirmek
her zamanmmkn olmayabilir. (rnek: Kam Mili)
A
L1
Fden=mddI d1
Fdin=mm
s
L2
mdd
B A
me
L
B
-
8/3/2019 Den Gel Em Erg
4/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
4
Adin=0
md
Bdin=0
==
==
==
sFsFMM
mmmm
FFF
dendine
dddd
dendin
..0
......
022
2121
2
22121
...
...).().(
ll
sF
ll
smBA
smsFllBllAM
din
bindin
dindindine
+=
+==
==+=+=
Tek dzlemde dengeleme yapldndan burada mkemmel dengeleme
yaplamamtr. Yalnzkuvvetler dengelenmi olup momentler
dengelenmemitir. Dolaysyla, 00 dindin BA dr.
Bu ekilde, ideal dengelemenin olmad duruma statik dengeleme
denilir.
II.) Dinamik Dengeleme : 0Mve0F ==
A) s=0 (Ayn dzlemde dengeleme)
dendd Fm =2
dinFm =2
dd
dendin
dindin
mm
FF
MF
BA
=
=
==
==
0,00,0
B) s0 (Farkl dzlemde dengeleme - Kam mili mekanizmas)Sistem,
zerinde bulunan ktlelerin durumuna gre 1 veya 2 dengeleme dzlemi
ile
dengeleme yaplr.
(mdd)1
Adin=0
(mdd)2
a
s1
m
s2 Bdin=0
b
d2d1
n
-
8/3/2019 Den Gel Em Erg
5/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
5
====
0,0
0,0
MF
BA bindin
Dengeleme dzlemlerinin ( )21 ve dd yeri, 21 ve ss olarak
seilerek, ( ) ( )1 .ve. dddd mm dengeleme byklkleri hesaplanr.
( ) ( )( ) ( ) bulunur..0)(....0
......021
2
211
22
2
1
ddddd
dddd
mssmsmMmmmF
=+==+=
( ) ( )1
..0 dddd mmmF == olarak hesaplanr.
rnek:
G=100Nn=1200 d/dak
a) Tekerlek zerinde yataklara gelen dinamik kuvvetleri
hesaplaynz?b) Bu sistemin dengelenmesini gerekletiriniz?
zm:a)
N25,12072
N5,2414
30
1200..10.15.
81,9
100
..2
3
2
===
=
=
=
din
dindin
din
din
din
FBA
F
F
mF
a=150mm
nA
e=15mm
b=150mm
1000mm
G
jant
o B
A
Fdin=m
a
m
Bb
-
8/3/2019 Den Gel Em Erg
6/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
6
1000mm
G
o
md
e
b)I-) lave ktle koyarak dengeleme :
dendd Fm =2
dinFm =2
kg315,0
485,0.10.15.81,9
100...... 322
=
===
d
ddddd
m
mmemmem
Eksen kaklnn tam karsna kg315,0=dm deerinde bir dengeleyici ktle
(kurun)konularak sistem dengelenmi olur.
II-) Ktle kararak dengeleme:
Bu konstrksiyonda ktle karma sistemin mukavemetini azaltabilir.
Ancak, aada verilenbir konstrksiyon tarznda ktle karma mmkn
olabilir.
R=5m
bosaltilan ktle
Gd
o
-
8/3/2019 Den Gel Em Erg
7/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
7
(mdd)
150
A
I
150 150
II
a
B
rnek:ekilde verilmi dengelenmemi ktlelerin iki dzlemde
dengelenmesi istenmektedir.
a) Yatak kuvvetlerini bulunuz?b) Verilenlere gre dengeleme bykln
bulunuz?n= 900 d/dak
311 10.9
=m
322 10.3
=m
zm:a)
N94,79
30
900..10.9
..
1
2
31
2111
=
=
=
din
din
din
F
F
mF
N64,26
30
900..10.3
..
2
2
32
2222
=
=
=
din
din
din
F
F
mF
NBA
BA
mBmA
F
7,52
)30.(10.6....
0
23
211222
=
=
+=+
=
NAA
NB
B
MA
447,52)68,8(
68,80450.300.64,26150.94,79
0
==
==+
=
b)I. zm : II. dzlem olarak, ( )22m nin dzlemi ve dengeleme bykl
seilerek, Idzleminin yeri ve dengeleme bykl bulunabilir.
( )
( )
mmaa
amamM
kgmm
mmmF
d
dd
dd
750)150.(10.310.9-
0)150(.....-0
10.610.310.9.
.....0
33
2222111
333
211
222
2
==++
=++=
==
=+=
-
8/3/2019 Den Gel Em Erg
8/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
8
II. zm : I ve II dzlemlerinin yeri seilerek dengeleme byklkleri
bulunur.
( ) ( )
( ) ( )
( )
( )
( ) ( ) 10.5,510.5,010.6.10.5,0.
0.350.250.10.3100.10.9-
0350..250..100..-0
10.610.310.9..
.......0
33311
322
2233
2222111
3332211
211
2
22
222
2
11
kgmmkgmm
m
mmmM
kgmmm
mmmmF
dddd
dd
ddd
dddd
dddd
===
=++
=++=
==+
=++=
(mdd)
100Adin=0 50
I
m22
150
m11
(mdd)
50100
II
Bdin=0
-
8/3/2019 Den Gel Em Erg
9/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
9
Farkl Dzlemlerdeki Ktlelerin Dengelenmesi:
ekil 1)
ekil 2)
ekil 3)
A
d
a
I
Zm22
nden
m11
b
d
II
XBY
A
d
X
Y
IZ
m22
B
m11 m33
3
d m22Y
21
m33II
Z
(referans ekseni)X
m11
d
A
d
Im11 m22 II
m33
B
m22
m11
Ysoldan
Z
X
-
8/3/2019 Den Gel Em Erg
10/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
10
ekil 4)
ekil 5)
(m)z
Y
A
m
B(m)y
(m)x
Z
m
X
A
D1 D2
B
D1Z
X
D2Z
X
-
8/3/2019 Den Gel Em Erg
11/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
11
Dinamik Dengeleme lemi:
00
=
=
din
din
B
A
0
0
=
=
M
Fdin
1-) En genel durumda matematik olarak dengelemeyi yapabilmek iin
mil zerinde
dengelenmemi ktlelerin bulunduu blge dnda iki dengeleme dzlemi
seilir.
2-) Seilen dengeleme dzlemlerinin konstrksiyon iin uygun olup
olmad aratrlr. Eer,
ktlelerin blgesi dnda dengeleme dzlemleri seilmemesi gerekiyorsa
konstrksiyona uygun
olacak tarzda ara yerde dengeleme dzlemleri seilerek dengeleme
gerekletirilir.
3-) Dengelenmemi her ktle, bulunduklar dzlemde ayr ayr I ve II
nolu dengelemedzlemleri kullanlarak dengelenir.
4-) Dengeleme dzlemlerinde ortaya kan dengeleme byklklerinin
bileke vektr ve as
bulunur. Yani, nce I nolu dengeleme dzlemine konulan dengeleme
byklklerinin x ve z
ynndeki bileenleri bulunur. Sonra bilekesi alnarak bu dzleme
konulmas gereken bileke
dengeleme bykl 22 )()()( IdzdzIdxdxIdd mmm +=
bulunur. Bu bykln yeri de )/( IdIdI xFzFArctg=
olarak hesaplanr. Ayn ilemler, II nolu dengeleme dzleminde
tekrar edilerek oradaki
22 )()()( IIdzdzIIdxdxIIdd mmm +=
dengeleme bykl ve )/( IIdIIdII xFzFArctg=
as hesaplanr.
-
8/3/2019 Den Gel Em Erg
12/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
12
a
A
I
B
b
II
BA
a b
I II
I
x
zII
z
x
a b
A B
I II z
x
y
x
z
rnek:
11m 11m
22m 22m
Z ekseni X ekseni
11m
22m
( )Idxdx
m ( )IIdxdx
m
( )Idzdz
m ( )IIdzdz
m ( )Idx
F ( )IIdx
F
( )Idz
F ( )IIdz
F
I nolu dengeleme dzlemi II nolu dengeleme dzlemi
( )Idxdx
m ( )IIdxdx
m
1 2
( )Idzdz
m ( )IIdzdz
m
( )Idd
m ( )IIdd
m
-
8/3/2019 Den Gel Em Erg
13/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
13
I nolu dengeleme dzleminde oluturulan dengeleme kuvveti. 22
)()()( IdxIdzId FFF +=
II nolu dengeleme dzleminde oluturulan dengeleme kuvveti. 22
)()()( IIdxIIdzIId FFF +=
I nolu dengeleme dzlemindeki dengeleme bykl
22 )()()( IdzdzIdzdIdd mmm +=
II nolu dengeleme dzlemindeki dengeleme bykl
22 )()()( IIdzdzIIdxdxIIdd mmm +=
Idxdx
Idzdz
Id
IdI
m
mArctg
xF
zFArctg
)(
)(
)(
)(
==
IIdxdx
IIdzdz
IId
IIdII
m
mArctg
xF
zFArctg
)(
)(
)(
)(
==
Problem1
d/d1500m,3.0m,2.0kg,1.5kg,3kg,0.5kg,1 214321 ======= nrrmmmm
a) Dengelenmemi durumda, A ve B yatak kuvvetlerini bulunuz?
b) Bu sistemde ideal dengelemeyi gerekletirerek, I ve II nolu
dengeleme dzlemlerine
konulacak dengeleme byklklerini ve alarn bulunuz?
n
A 100 150 200 150 250
I IIz
m1
xB
D2D1z
x
y
m2D1
r2
m2D2
m3
r1
-
8/3/2019 Den Gel Em Erg
14/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
14
zm:
a)
kgmm
kgmm
Z
X
5.15.0360cos
6.2866.0330cos
33
33
===
===
rd/s5030
1500.
==
D2 Z ekseninde
05.15.134 == Zmm
Z Ekseni X Ekseni
NrmBAZZ
4.2467212
==+
=+= 060025002
12 zz BrmMA
NBz 1028600
250.616850== NAz 3.1439=
211
223 rmBrmA xxx +=+ 8.49347.19245 +=+ xx BA
NAB xx 8.14310= =+= 06004502500 223211 xxx BrmrmMA
NBx 13.12378
600
8.7426877== NAx 77.1932=
NAAAZX
8.240922 =+=
NBBB ZX 74.1242022
=+=
m3x
m4
m3zm3
x
Az Bz
m2
350 250250 r1
Ax
m3x
Bx
m1
r1
200 150 250250 r2
-
8/3/2019 Den Gel Em Erg
15/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
15
b)
Z Ekseni X Ekseni
Z Ekseni
+==IIZIZz
mmrmF )()(012
IIZIZ mm )()(1.0 +=
=+= 0750)(1500 12 IIZz mrmMI
kgm08.0)(m
kgm02.0)(
IZ =
=
IIZm
X Ekseni
=++= 2311 .)()(0 rmmrmmF XIIXIXX
58.0)()(78.0)(2,0)(
=+=++
IIXIX
IIXIX
mmmm
0750)(350150.0 2311 =+= IIXXX mrmrmMI
kgm256.0)(m
kgm323,0)(
IX =
=
IIXm
I nolu dengeleme dzlemi
kgm268.0)()()( 22 =+= IZIXI mmm
o
IX
IZI
mmArctg 35.17
)()( ==
3. Blgede
ooo
I 35.19735.17180 =+=
2.)( IdenI mF =
NFdenI 93.6605=
-
8/3/2019 Den Gel Em Erg
16/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
16
z
x
I II
x
z
II nolu dengeleme dzlemi
kgm324.0)()()( 22 =+= IIZIIXII mmm
o
IIX
IIZII
m
mArctg 53.3
)(
)(==
3. Blgede
ooo
II 53.18353.3180 =+=
2.)( IIdenII mF =
8001=denIIF N
( ) 256,0=Ixm ( ) 323,0=IIxm
1 11
( ) 08,0=Izm ( ) 02,0=IIzm
( ) 268,0=Im ( ) 324,0=IIm
-
8/3/2019 Den Gel Em Erg
17/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
17
n100A 150
I
200 150250
II
100B
z
x
Problem 2:
( )2m ( )3m ( )2m ( )3m
( )1m ( )1m
d/d1200kgm,4.1kgm,0.8kgm,2.1 332211 ==== nmmm
a) A ve B yatak kuvvetlerini bulunuz?
b) Tam dengelemeyi gerekletiriniz? (Dengeleme byklklerini ve
alarn bulunuz?)
zm:
a)
7.0,69.0,848.0
40,21.1,4.0,848.0
332211
332211
===
====
ZZZ
XX
mmm
mmmX
X Ekseni Z Ekseni
= 0XF
XXXXX BmmmA ++=+2
222
112
33
NBA XX 600)40(038.02 ==
-
8/3/2019 Den Gel Em Erg
18/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
18
= 0XMA
0950850500150 2332
222
11 =++ XXXX Bmmm
NA
NB
X
X
35.12257
35.11657
=
=
= 0ZF
ZZZZZ BmmmA ++=+2
222
112
33
NAB ZZ 9.9558)40(542.02 ==
= 0ZMA
0950850500150 2332
222
11 =++ ZZZZ Bmmm
NA
NB
Z
Z
56.4951
76.13510
=
=
NAAAZX
8.1321922 =+= NBBB ZX 73.1784422 =+=
b) X Ekseni Z Ekseni
= 0XF
IIXXXXIX mmmmm )()( 221133 ++=+
038.0)()( = IIXIX mm
= 0XMI 0600450)(250100 332211 =++ XIIZXX mmmm
kgm617.1)(
kgm58.1)(
=
=
IX
IIX
m
m
-
8/3/2019 Den Gel Em Erg
19/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
19
= 0ZF
ZZIZIIZIZ mmmmm 33221 )()( ++=+
542.0)()( = IZIIZ mm
= 0ZMI
0600450)(250100 332211 =++ ZIIZZZ mmmm
kgm963.0)(
kgm5.1)(
=
=
IZ
IIZ
m
m
I nolu dengeleme dzlemi
kgm882.1)()()( 22 =+= IZIXI mmm
o
IX
IZI
m
mArctg 77.30
)(
)(==
1. Blge
II nolu dengeleme dzlemi
kgm178.2)()()( 22 =+= IIZIIXII mmm
o
IIX
IIZII
m
mArctg 5.43
)(
)(==
3. Blge
ooo
II 5.2235.43180 =+=
-
8/3/2019 Den Gel Em Erg
20/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
20
Problem 3:
n=1848 dev/dak
a) Dinamik yatak kuvvetlerini hesaplaynz?
b) Bu sistemi dinamik olarak dengeleyiniz?
KRANK - BYEL MEKANZMASININ DENGELENMES
Peryodik evrimli makinelerin en basiti olmak zere tek silindirli
bir motorun dengelenmesi ele
alnacaktr. nk, byle bir sistem mhendislik asndan motorlarn
kullanld her durumda
karmza kan bir problem olup, mutlaka dengelenmesi gerekmektedir.
nk, gerek gaz
kuvvetleri gerekse gidip gelen ve dnen paralarn bulunmas sistem
zerinde dengelenmemi
ktle ve kuvvetleri douracaktr.
Y
X
Z
-
8/3/2019 Den Gel Em Erg
21/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
21
Ao
A
B
1 2
Lr
G1 G2
krank
biyel
piston
Ao
Ao
AL B
Piston
Biyel
Krank
mb
mb
r
Krank biyel mekanizmalarnda gaz kuvvetleri oluurken dnen ve
gidip gelen ktleler ise atalet
kuvvetlerini olutururlar. Bu sistemin dengelenebilmesi iin ana
yataklara intikal eden atalet
kuvvetlerinin sfr veya sfra yakn bir deerde olmas gerekmektedir.
Bunun iin kinetik analiz
yaplarak hz ve ivme deerleri bulunur. Daha sonra dinamik analiz
iin ktle atalet kuvvetleri
dengeleme byklkleri, yatak byklkleri hesaplanr. Ktle atalet
kuvvetleri bulunarak
bunlarn dengelenmesi yaplacaktr. Biyel ktlesi iki paraya ayrlr
ve bunlar A ve B
noktalarna indirgenir. Ayn ekilde, krank ktlesi de iki paraya
ayrlarak, A ve A0 noktalarna
indirgenebilir.
-
8/3/2019 Den Gel Em Erg
22/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
22
Ao =t
r
piston
A
1 2biyelL
B
krankmp
m
xmb
H
y
md
x
G1 G2
1G ( Krankn arlk merkezi)
2G ( Biyelin arlk merkezi)
2=AG2.G2B (Biyel atalet yarap)
2
=A0G1.G1A (Krank atalet yarap)
sin... 2rmd 2.. rmd
cos... 2rmd
md= dnen ktle (krank miline indirgenmi ktle)
m = telenen ktle (piston miline indirgenmi ktle)
mp = piston ktlesi
mA(1)
= (1) nolu krank elemanndan Aya indirgenen ktle
mA(2)= (2) nolu biyel elemanndan Aya indirgenen ktle
mB(2)
= (2) nolu biyel elemanndan Bye indirgenen ktle
2
)2(
)2()1(
)sin(1cossinsin
sin.sin.
/sinve/sincos.cos.
..
L
r
L
r
LrAH
LAHrAHLrx
BHHAx
mmm
mmm
o
Bp
AAd
==
==
==+=
+=
+=
+=
-
8/3/2019 Den Gel Em Erg
23/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
23
r/L
-
8/3/2019 Den Gel Em Erg
24/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
24
mb
r
Aor'
md
II. mertebeden atalet kuvvetlerinin )2cos)(..( 2 L
rwrm ihmal edilmesi istendii durumlarda
yataktaki bileke dinamik kuvvet ( F ),
[ ] 2/12222220 )sin..()cos..)(( wrmwrmmFyFxFA dd ++=+==
Dengeleme (Balans) Ktlesinin Deeri )( bm
Seilecek mb (balans ktlesi) dengeleyici ktle, yerletirilecei
mesafe ve asal konuma gre Fx
ve Fy dinamik kuvvetlerini belirli lde etkileyecektir.
En genel halde, dengeleyici ktle mb ve 'r mesafesi ise:
cos'..2cos..cos..).(
sin'.sin..
222
2.
2
wrmL
rwrmwrmmFx
wrmwrmFy
bd
bd
++=
=
alma artlarna ve parametrelere gre '.rmb deeri tespit
edilir.
1-) mb=md ve 'rr = olarak ekildeki konumda seilsin
rmrm db ='.
deyde 0.sin).w.r'm-.r( 2b == dmFy
yatayda coscos2co.cos.. 2222 .r'.wm..r.wmsL
rr.wmwrmFx bd ++=
)2cos(cos..
2cos....cos...
2
22
L
rwrmFx
L
rwrmwrmFx
+=
+=
-
8/3/2019 Den Gel Em Erg
25/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
25
Grlyor ki dengeleyici ktle olarak ilave edilen kar arlk mb, dey
kuvveti yok ederken
yatay kuvveti de azaltr. Dengeleyici kuvvet arttka eksenel
kuvvette azalr. Ancak, bu durumda
bu sefer dey yndeki Fy kuvvetinin deeri sfr olmaz artar.
2-) mb = md+ m ve II. derece atalet kuvvetiihmal edilirse
yatayda Fx=0
deyde sin..sin.).(sin.. 222 wrmwrmmwrmFy dd =+=
3-) ,...)5
4,
3
2,
3
1,
2
1(,...)
5
3,
3
2,
3
1,
2
1( db mmm +=
rnek :
Tek silindirli bir motorda;
d
dn
mmL
mmr
kgm
kgm
kgm
krank
biyel
krank
krank
biyel
piston
2000
292
65
178,0
203,0
142,0
=
=
=
=
=
=
olduuna gre:
a) Dengelenmemi olan atalet kuvvetlerinin x,y eksenleri
zerindeki bileenlerini krankdnme as =0,90,180,270,360 derecelerde
hesaplaynz ve grafiini iziniz?
b) 'rr = ve dbalans mmm += konulduu takdirde Fx ve Fy
kuvvetlerini bularak,grafiini iziniz?
c) 'rr = ve dbalans mmm3
2+= konulduu takdirde Fx ve Fy kuvvetlerini bularak,
grafiini iziniz?
-
8/3/2019 Den Gel Em Erg
26/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
26
25mm
40mm
Ao
G1
krank
1
biyel
G2
2
170mm
122mm
mp=0.142 kg
)1(A )2(A
)2(B
Krank ya da biyel zerinde bir arlk merkezi verilmedii takdirde,
ktle yar yarya alt ve st
noktaya indirgenir.
a) = 0krankF
kgmkgm
mmm
mmm
AA
AAG
krankAA
109,0068,0
25.40.0
178,0
)1(
)1(1
)1(
0
0
0
==
==
==+
kgmkgm
mmm
mmm
F
BA
BAG
biyelBA
biyel
085,0118,0
170.122.0
203,0
0
)2()2(
)2()2(
2
)2()2(
==
==
==+
=
sin...F
2cos)..(..cos..).(F
snrad209,43
30
2000.
30
.n226,0
227,0
2Y
22x
)2(
)2()1(
rm
L
rrmrmm
mkgmmm
mkgmmm
d
d
BBp
AAAd
=
++=
===
==+=
==+=
-
8/3/2019 Den Gel Em Erg
27/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
27
3
2
4
1
5 Fx
y
-143
647
1435
-647
-1148
1 2 3 4 5
00 090 0180 0270 0360
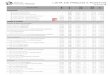
Fx (N) 1435 -143 -1148 -143 1435Fy (N) 0 647 0 -647 0
F (N) 1435 662 1148 662 1435
b)
'rr
mmm dbalans
=
+=
2cos)..(..F
cos..).(2cos)..(..cos..).(F
2x
222x
L
rrm
rmmL
rrmrmm
dd
=
+++=
sin...sin..).(sin...F 222y rmrmmrm dd =+=
-
8/3/2019 Den Gel Em Erg
28/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
28
4
1,3,5 Fx
2
Fy
-143
644
-644
1 2 3 4 5
00 090 0180 0270 0360
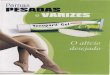
Fx (N) 143 -143 143 -143 143
Fy (N) 0 -644 0 644 0
F (N) 143 660 143 660 143
-
8/3/2019 Den Gel Em Erg
29/29
Do. Dr. Rahmi GL, Makine Dinamii Ders Notlar
3
4
1
5
Fx
2
y
c)
'rr = ve dbalans mmm3
2+=