PowerPoint Presentation
Introduo aRobtica
Prof. Gustavo AvellarMestre em Engenharia EltricaSinais e
Sistemas Robtica
1
Robs:Quando e como surgiram?
2
Se engana quem pensa que idias sobre robs so novas.2
Fonte: salvius.org3
Ideias sobre robs no so exclusividade do sculo 20. H vrias
histrias na mitologia grega, romana e hebraica que contam sobre
gigantes construdos a partir do barro, bronze ou outros materiais e
eram comandados para proteo de cidades e outras tarefas3
Fonte: salvius.org4
Sculo 15 Leonardo da Vinci estuda o corpo humano e cria um
projeto de humanoide operado atravs de um sistema de roldanas.No
chegou a construir, mas depois que os desenhos foram descobertos na
dcada de 50, vrias replicas foram construdas4
Fonte: engadget.com
5
Sculo 19 Nicola Tesla desenvolve um barco controlado por ondas
de rdio.5
Fonte: wchsonline.org6
Nos anos 1920 o termo Rob foi cunhado por Karel Capek em sua pea
Robs Universais Rossum. Rob vem da palavra tcheca robota, que quer
dizer trabalho forado, escravo.6
Fonte: themanufacturer.com7
Robs industriais vem sendo desenvolvidos desde 1938 e largamente
utilizados em linhas de produo desde os anos 70. 7
Fonte: popsci.com8
Nos anos 2000 ocorreram as provas do Grande Desafio DARPA, em
que os veculos deveriam percorrer um trajeto de quase 300 km no
deserto, sem ajuda humana.8
Fonte: jpl.nasa.gov
9
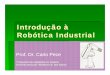
No campo dos robs mveis, ainda temos o exploradores que esto
sendo enviados para marte desde os anos 90:1997: SujournerPeso:
.11.5kgMisso: Previsto 7 sols Realizado: 83 sols
2003: Spirit e OpportunityPeso: 185kgMisso: Previsto 90 sols
Realizado: 2623 sols (Spirit) 4524 sols (Opportunity)
2012: CuriosityPeso: 899 kgMisso: Previsto 668 sols
Realizado1493 sols
9
Fonte: jpl.nasa.gov
10
Na Lua e em Marte no tem GPS! Como um rob pode se
localizar?10
Fonte: dji.com
11
Mais recentemente, dezenas de companhias invadiram o mercado com
drones domsticos que podem ser utilizados para lazer e
trabalho.11
Fonte: nasa.gov12
Enquanto militares e institutos de pesquisa vem utilizando-os
extensivamente desde o final da dcada de 80, desde o advento do
GPS12
O que um rob?
13
ISO 8373:2012
2.1 manipuladormquina cujo mecanismo consiste em uma srie de
segmentos com movimento de rotao ou linear entre si, com o propsito
de pegar e/ou mover objetos (peas ou ferramentas) em vrios graus de
liberdade.
2.2 autonomiahabilidade de realizar tarefas baseado no estado
atual e em sensores, sem interveno humana.
2.4 reprogramvelcriado de forma que os movimentos programados
possam ser modificados sem alteraes fsicas.
2.5 multipropsitocapaz de ser adaptado para aplicaes diferentes
sem alteraes fsicas.
Fonte: iso.org14
ISO 8373:2012
2.6 robmecanismo atuado programvel em dois um mais eixos com um
grau de autonomia, movimentando-se em seu espao de trabalho para
realizar tarefas.
2.9 rob industrialmanipulador controlado automaticamente,
reprogramvel e multipropsito, programvel em trs ou mais eixos,
podendo estar fixo ou mvel, para uso em aplicaes de automao
industrial.
2.13 rob mvelrob capaz de se deslocar sob seu prprio
controle.
Fonte: iso.org15
ISO 8373:2012
2.14 sistema robticosistema composto por robs e outras mquinas,
equipamentos, ferramentas, dispositivos e sensores que apoiam o rob
na realizao das tarefas.
2.16 robticaCincia e prtica de projetar, desenvolver, fabricar e
utilizar robs.
Fonte: iso.org16
ISO 8373:2012
2.26 rob colaborativorob projetado para interao com pessoas
2.27 cooperaotroca de informaes e aes entre mltiplos robs para
garantir que seus movimentos em conjunto efetivamente contribuam
para realizao de tarefas
2.28 rob inteligenterob capaz de realizar tarefas atravs da
leitura de sensores e interagindo com outras fontes externas e
adaptando seu comportamento.
Fonte: iso.org17
Robtica18
Robtica a interseo de quatro grandes reas.18
RobticaFonte: robotshop.com (adaptado)19
Mas eu prefiro pensar que a robtica a juno de tecnologia,
engenharia, matemtica e um monte do outras coisas com
diverso.19
Robtica: para qu?
20
21
21
Robtica: para qu?Carros Autnomos22
23
Problema:acidentes matam mais de 1.3 milhes de pessoas por
ano94% destes acidentes so causados por erros humanos20% do espao
das cidades utilizado para estacionar mais de um bilho de
carros23
Fonte: FIRJAN24
E se pudssemos reaproveitar esse tempo de uma forma melhor ao
mesmo tempo em que retiramos o pior fator de erro dessa
equao?24
Fonte: wired.com25
O carros nas ruas j so em parte robs:
1. Relatrio de condies da estrada enviado para outros carros2.
ACC Piloto Automtico adaptativo3. Sistema anticoliso
omnidirecional4. Sistema de preveno de mudana de faixa5. Baliza
automtica6. Sensores de ponto cego7. Ajuste de velocidade de
curva.
25
SensoresLasers, radares e cmeras detectam objetos em todas as
direesInteriorFeito para passageiros, no para
motoristasBateriasFornecem energia para o veculoFormatoMaximiza o
campo de viso dos sensoresComputadorSoftware e hardware especficos
para direo autnomaSistemas de BackupAtuam em caso de falhas nos
sistemas de direo, frenagem, computador e outrosFonte:
google.com/selfdrivingcar26
Fonte: google.com/selfdrivingcar
27
Soluo:melhora a vida das pessoas mudando a forma como nos
transportamosmais seguranamais comodidade, podemos fazer outras
coisas enquanto nos deslocamosno necessrio aprender a dirigir27
Robtica: para qu?Explorao espacial28
Fonte: space.com29
50-60 mm usd - lanamento do falcon 9um dos mais baratos do
mercadoCombustvel: apenas 200 mil dlaresfoguete reutilizado 1000
vezes: custo do lanamento cairia para 50 mil usd29
Fonte: spacex.com30
Fonte: spacex.com31
Fonte: plus.maths.org32
Como saber para onde o rob est indo?32
Fonte: plus.maths.org
33
Filtro de KalmanPredio Medio AtualizaoIsso era feito antes de
existir GPS! Navegao por corpos celestes, como era feito no tempo
da navegao!
O GPS apenas mais uma medida de posicionamento!33
34
Robtica: para qu?Drones35
Fonte: solveforx.com36
Recentemente vrias demonstraram interesse em realizar entregas
auxiliadas por drones: Amazon, Dominos, etc36
Fonte: flyzipline.com37
A proposta da Zipline cobrir Ruanda com uma rede de entregas de
medicamentos e bolsas de transfuso.Estradas precriasReduo no tempo
de acesso a medicamentos e transfuses de 4 horas para 15
minutos37
38
38
39
40
Fonte: uber.com41
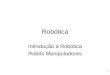
The SUV's hard drives boot up, its censors come to life, and
it's ready to roll. Here's how Stanley works. J.D.1. GPS antennaThe
rooftop GPS antenna receives data that has actually traveled twice
into space once to receive an initial position that is accurate up
to a meter, and a second time to make corrections. The final
reading is accurate up to 1 centimeter.2. Laser Range
FinderSo-called lidar scans the terrain 30 meters ahead and to
either side of the grill five times a second. The data is used to
build a map of the road.3. Video cameraThe video camera scans the
road beyond the lidar's range and pipes the data back to the
computer. If the lasers have identified drivable ground, software
looks for the same characteristics in the video data, extending
Stanley's vision to 80 meters and permitting safe acceleration.4.
OdometryTo contend signals blocked by, say, a tunnel or mountain, a
photo sensor in the wheel well monitors a pattern imprinted on
Stanley's wheels. The data is used to determine how far Stanley has
moved since the blackout. The onboard computer can then track the
vehicle's position based on its last known GPS location.
41
Fonte: google.com/selfdrivingcar42
Fonte: uber.com43
Fonte: uber.com44
Sistema de medio inercial: inspirao na natureza
44
Fonte: uber.com45
Fonte: uber.com46
Novamente temos o problema do fator humano atrapalhando as
coisas...46
Fonte: h2hassociates.com47
No final tudo se resume a usar os sensores para perceber o mundo
a nossa volta.47
48
Com essas informaes, nossos robs podem saber onde esto
localizados no mundo. E a partir da podem tomar suas decises.48
49
A ferramenta bsica para isso a matriz de transformao homognea,
que contem dados de posio e orientao dos objetos em relao aos
referenciais.49
RobticaMercado e Perfil Profissional50
Fonte: ifr.org51
Fonte: ifr.org52
Fonte: ifr.org53
53
54
A tecnologia cria novas oportunidades de trabalho enquanto muda
os mercados existentes. Muitos achavam que a adoo do caixa
eletrnico pelos bancos seria o fim dos empregos dos bancrios. O
fato que o uso do caixa eletrnico e outras formas de acesso digital
reduziu os custos de operao para as empresas, permitindo a abertura
de mais agncias e capilarizando ainda mais o acesso.54
Researcher/Robotics Software Engineer (Self-Driving Car)Software
Engineering - Mountain View, CA, USA
ResponsibilitiesWork with world-class experts in the field of
autonomous vehicles and advance the state of the art in areas such
as computer vision, sensor fusion, machine learning, object
tracking, and motion planning
QualificationsMinimum qualifications:MS degree in Robotics,
Computer Science or equivalent practical experience.Experience in
hands-on robotics research and expertise in one or more of the
following: computer vision, LIDAR, object tracking, sensor fusion,
perception, machine learning, motion planning, and
controlExperience in data structures and advanced
algorithmsExperience programming in C++
Preferred qualifications:PhD in Robotics, Computer Science or
equivalent fieldExperience with field robotics and systems
designExperience with robust, safety-critical, efficient code.
55
Software EngineerAdvanced Technologies Center, Pittsburgh,
PA
Core SkillsWe're looking for strong, capable software developers
with a range of skills. In particular, experience with Python, C++,
Linux, and related technologies are a plus.
Bonus Skills3D graphics/OpenGLEmbedded systems
developmentAlgorithm developmentAutonomous vehicle & general
roboticsComputer visionClassification & predictionAmazon Web
ServicesDistributed and large scale computingGame
programmingMetrics & data analysis
56
Software Engineer / Robotics EngineerWaltham, Massachusetts
For this position we are seeking a hard working individual with
experience developing, debugging and optimizing real-time software
for implementing closed-loop feedback control on the worlds most
advanced walking robots. We require a Bachelors or Masters degree
in computer science or engineering and significant hands-on
experience developing, testing, and debugging software for
real-time sensing and control. Strong interpersonal, speaking and
writing skills are required. We desire experience ranging from
concept through build, test, debug, redesign, production and
delivery.
We are looking for experience in several of the following
areas:C, C++ programming for real-time control and sensor
processingQNX or Linux in embedded real-time systemsCVS or
MercurialCode control disciplineDigital signal processingDevice
drivers for interfacing to control and sensing hardwareNetworking
and peripheral interfaces
57
Software Perception EngineerWaltham, Massachusetts
We are seeking a Robotics Engineer to give our legged robots the
ability to navigate through forests and across mountains. Combining
state of the art sensors with unusually mobile robots, and working
with perception experts from multiple organizations, our projects
offer the opportunity to make autonomous systems work on high
profile, outdoor robots.
The ideal candidate has experience participating in hands-on
robotics research and expertise with motion planning and
LIDAR/vision processing. He or she should be a MS, PhD, or
highly-skilled BS, and should have a strong software engineering
background, including knowledge of C++, python, object oriented
design, and experience on a team delivering real systems.
Examples of excellent practical experience include:calibrating
cameras,model building from point clouds,data fusion for
localization,object tracking,and getting a robot from here to there
in the real world.
Our engineers write lots of software, conduct sensor
experiments, test robots on rough terrain in the rain and snow,
communicate results to experts and laymen, operate with the team to
pull off high-profile demos, and develop innovative solutions to
new problems every day.
58
Obrigado!Perguntas?
Prof. Gustavo AvellarMestre em Engenharia EltricaSinais e
Sistemas Robtica