Embed Size (px)
Citation preview

Armando L. Alaminos Bouza,Físico – Médico.Mevis Informática Médica LTDA
Recursos técnicos no planejamento :
-Aparato de Estereotaxia.-Imagens estereotáxicas (usualmente CT e RM).-Imagens não estereotáxicas (usualmente RM ).-Fusão multimodal de imagens .-Fusão com atlas de neuroanatomia funcional.-Software de Planejamento.

Como localizar/atingir um ponto do cérebro com máxima precisão ?
Alvores da Estereotaxia.
Horsley & Clark 1906 - London Munssen 1918 - Montreal
UCLA Museum of Medical Apparatus
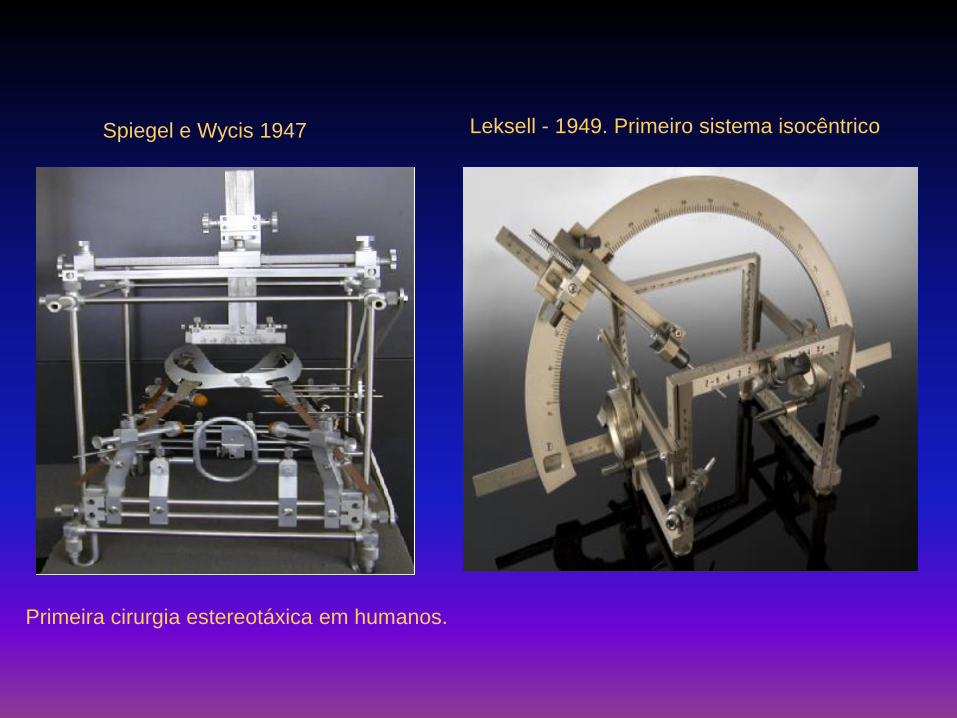
Spiegel e Wycis 1947 Leksell - 1949. Primeiro sistema isocêntrico
Primeira cirurgia estereotáxica em humanos.

Aparatos estereotáxicos :
-Sistema de eixos Cartesianos rígidos.-Imobilizador ( ±0.3 mm).-Localizador ( ±0.5 mm).-Posicionador ( ±0.5 mm).
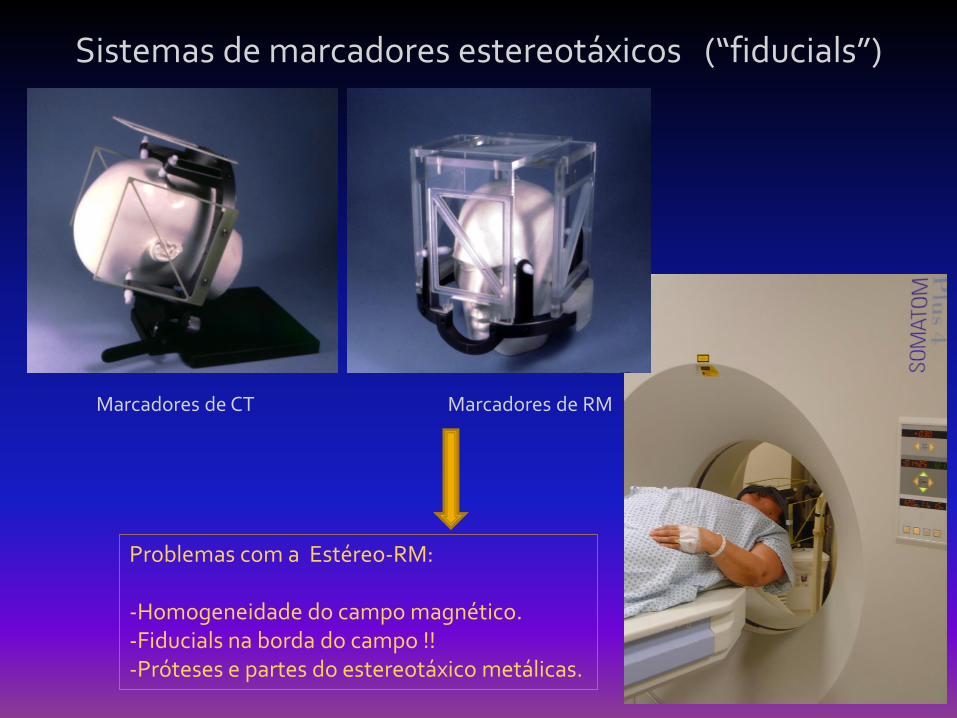
Sistemas de marcadores estereotáxicos (“fiducials”)
Marcadores de CT Marcadores de RM
Problemas com a Estéreo-RM:
-Homogeneidade do campo magnético.-Fiducials na borda do campo !!-Próteses e partes do estereotáxico metálicas.
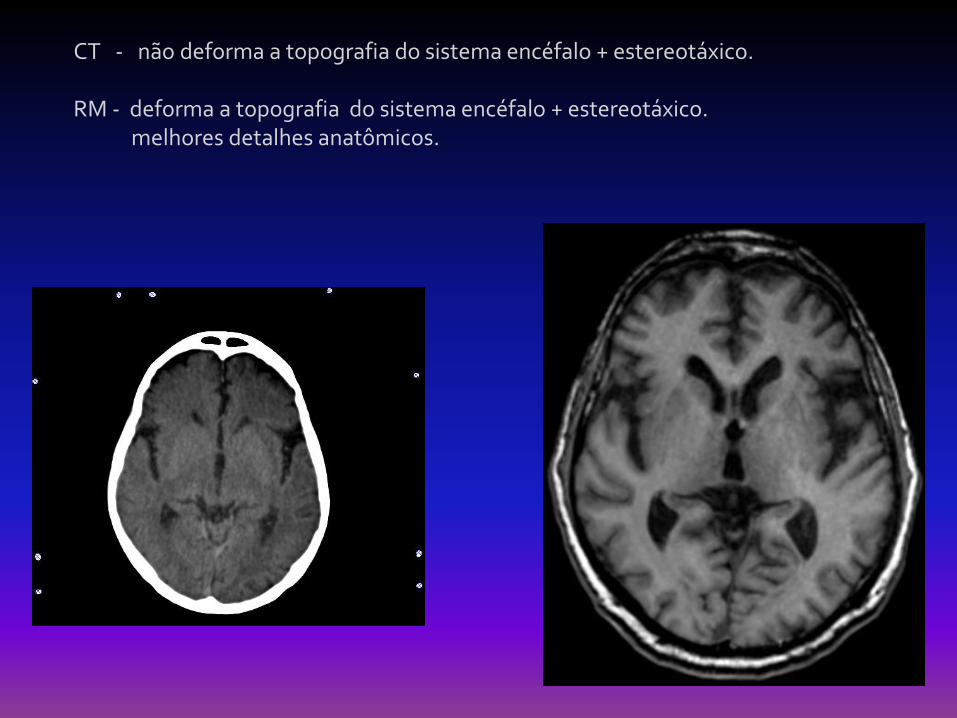
CT - não deforma a topografia do sistema encéfalo + estereotáxico.
RM - deforma a topografia do sistema encéfalo + estereotáxico. melhores detalhes anatômicos.
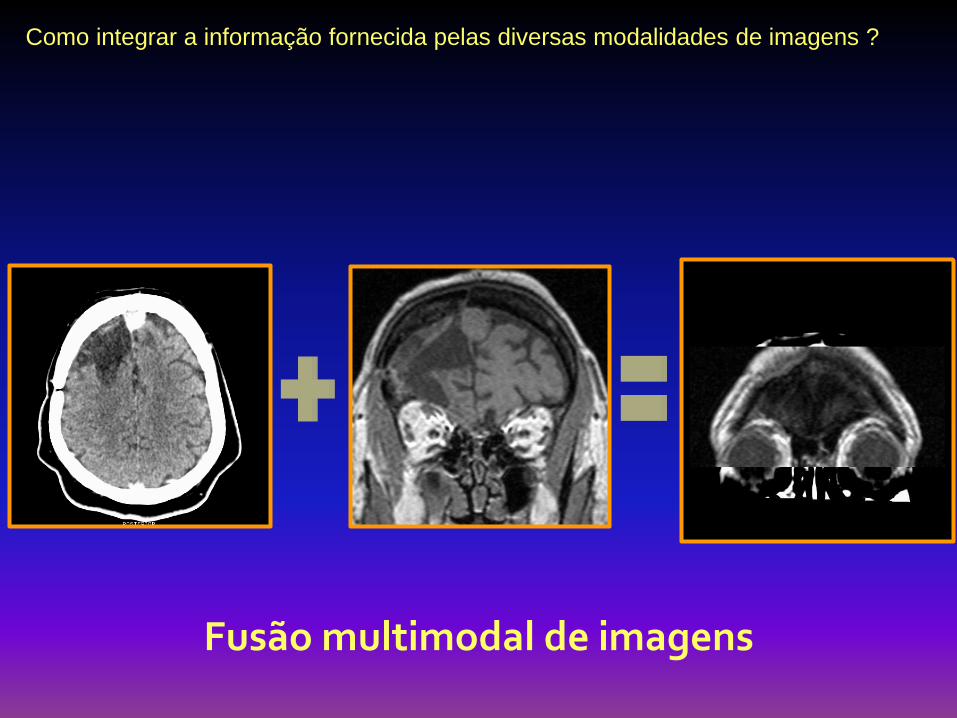
Como integrar a informação fornecida pelas diversas modalidades de imagens ?
Fusão multimodal de imagens

Conectividade
CT
PET
SPECT
MR
- DICOM
- Formatos de imagens proprietários do fabricante.
- Ethernet , CDROM, etc.
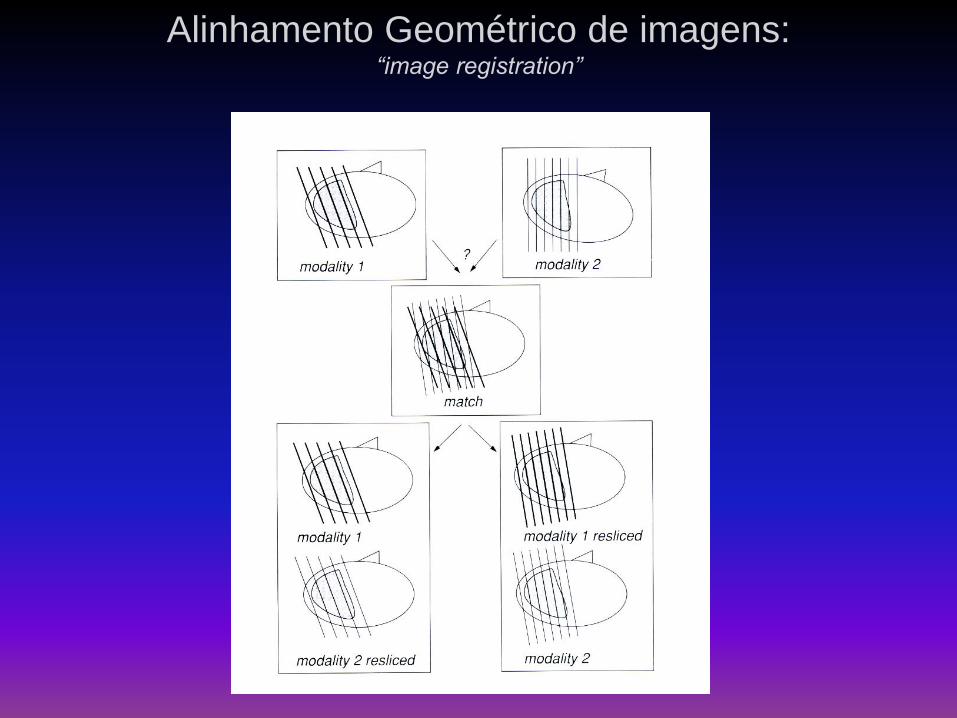
Alinhamento Geométrico de imagens:“image registration”

Basicamente, a fusão é tratada como um problema de transformação de coordenadas de um sistema de referência a outro. Pode se apresentar como transformação homogênea, entre dois sistemas de referência S1 na modalidade M1 e S2 na modalidade M2:
x = t11 u + t12 v + t13 w + t14
y = t21 u + t22 v + t23 w + t24
z = t31 u + t32 v + t33 w + t34
1 = t41 u + t42 v + t43 w + t44
onde (x,y,z) representam as coordenadas de um ponto do espaço no sistema dereferência S1 e (u,v,w) as coordenadas do mesmo ponto do espaço medidas nosistema de referência S2. Os elementos da transformação (t11, t12, t13, t14, t21,t22,...,t44), serão tratados daqui em diante como elementos de uma matriz T naforma t[i,j] .
equação 1
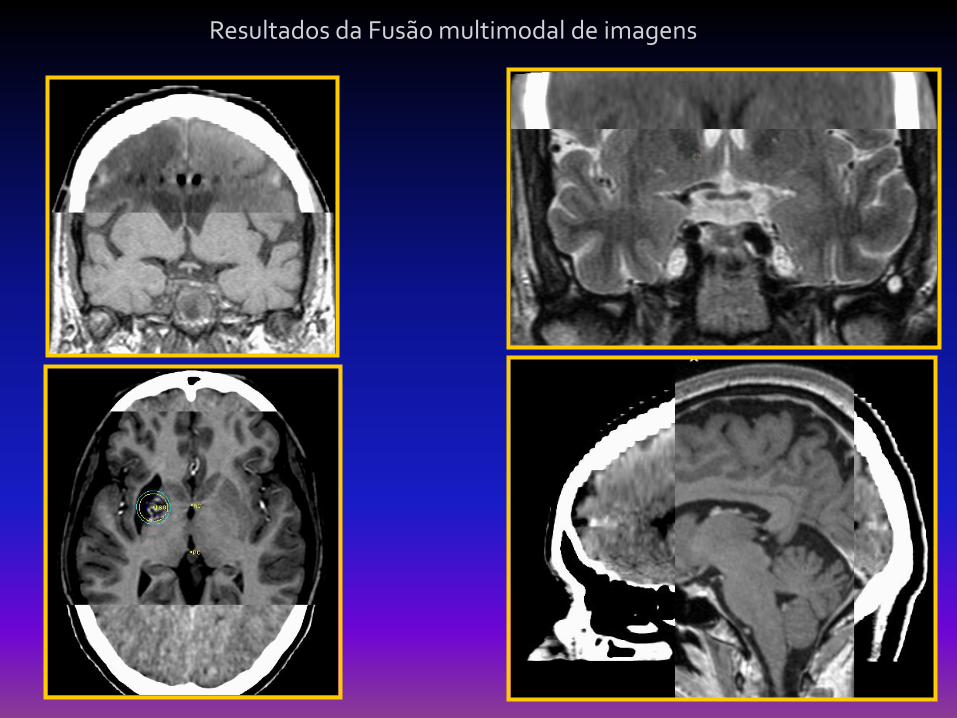
Resultados da Fusão multimodal de imagens

Resultados da Fusão multimodal de imagens
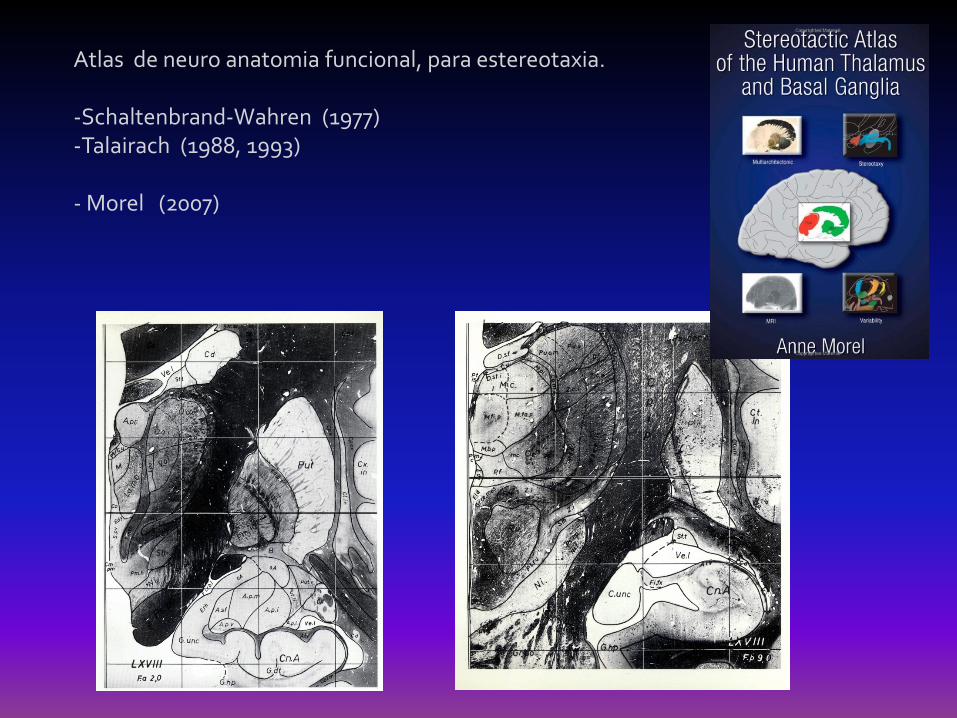
Atlas de neuro anatomia funcional, para estereotaxia.
-Schaltenbrand-Wahren (1977)-Talairach (1988, 1993)
- Morel (2007)

Cirurgia Funcional - Fusão com mapas
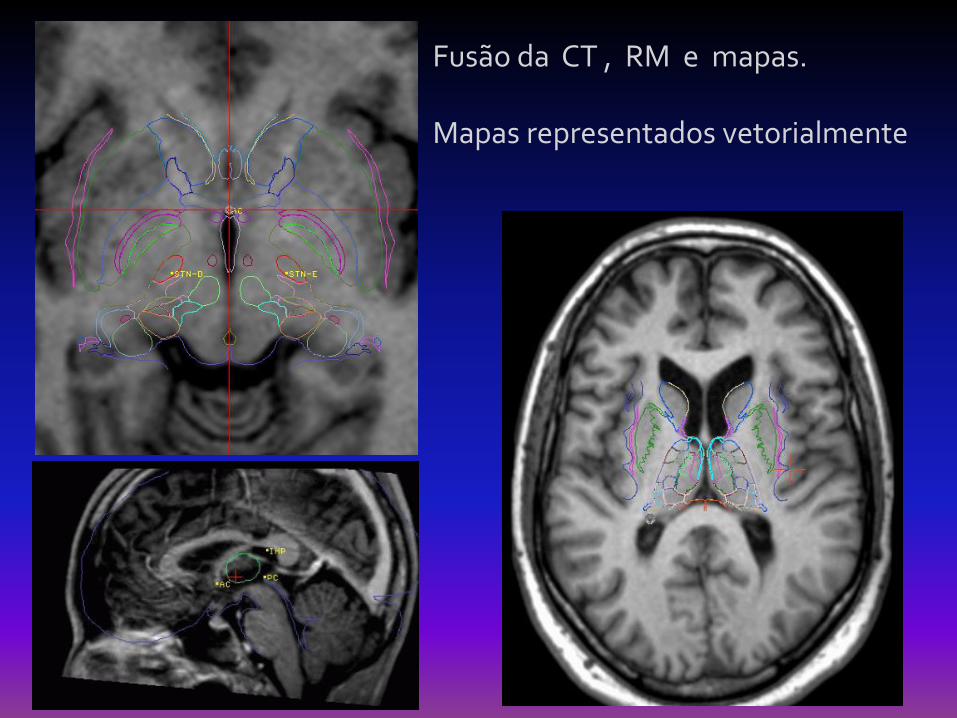
Fusão da CT , RM e mapas.
Mapas representados vetorialmente
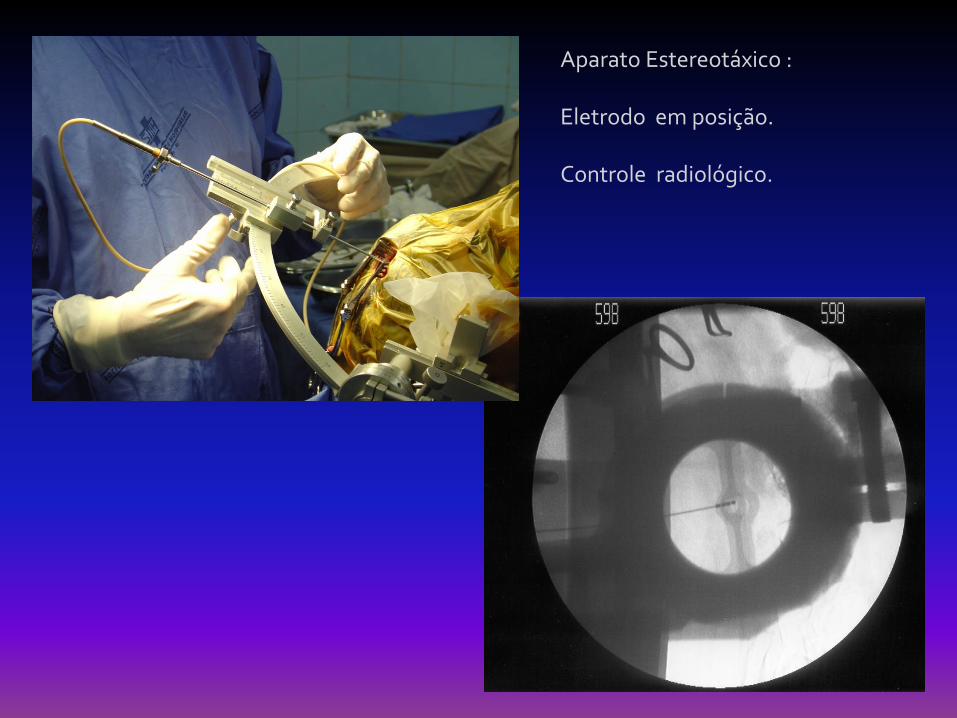
Aparato Estereotáxico :
Eletrodo em posição.
Controle radiológico.
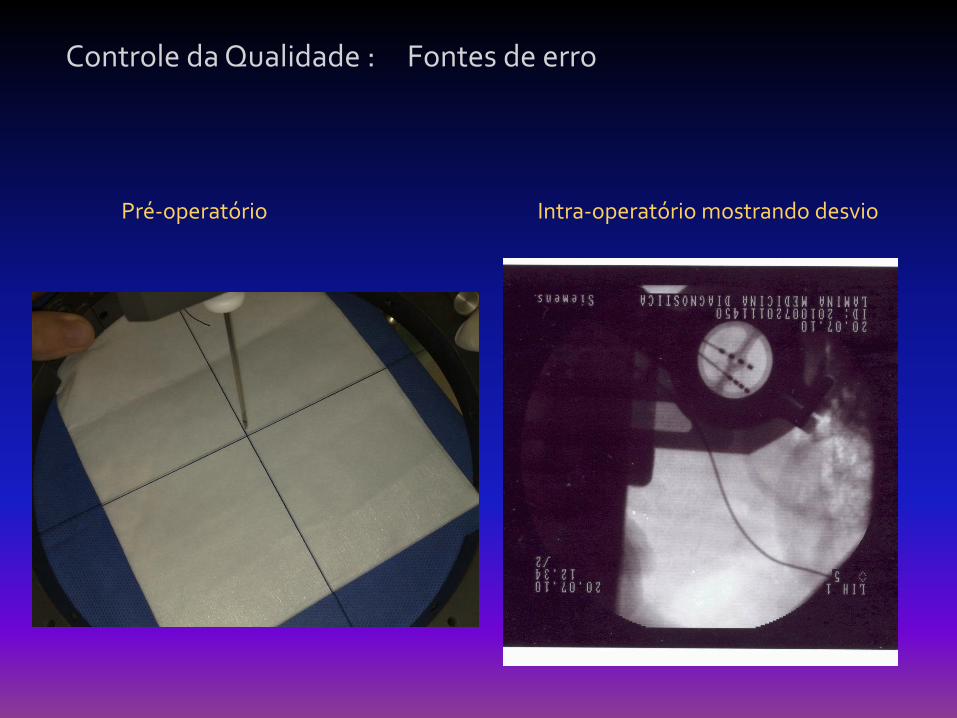
Controle da Qualidade : Fontes de erro
Pré-operatório Intra-operatório mostrando desvio
Conclusões
Importância do bom planejamento na cirurgia funcional :
•Mínimo tempo de exploração eletrofisiológica.
•Ângulo ótimo para atingir vários núcleos com 1 DBS e evitar estruturas de alto risco.
•Mínima invasividade
Armando Alaminos Bouza - 2007





























