Embed Size (px)
Citation preview

Inversor CA de freqüência ajustávelSérie A
Controle padrão e vetorial
Versões de firmwareControle padrão: xxx.x - 3.001Controle vetorial: xxx.x - 3.002
Manual do Usuário
www.abpowerflex.com

Informações Importantes para o UsuárioOs equipamentos de estado sólido possuem características operacionais que diferem daquelas encontradas em equipamentos eletromecânicos. As Diretrizes de Segurança para a Aplicação, Instalação e Manutenção dos Controles de Estado Sólido (Publicação SGI-1.1, disponível a partir de seu Escritório de Vendas local da Rockwell Automation ou online no endereço www.rockwellautomation.com/literature) descrevem algumas diferenças importantes entre os equipamentos de estado sólido e os dispositivos eletromecânicos ligados por fios. Devido a esta diferença e também à ampla variedade de usos dos equipamentos de estado sólido, todos os responsáveis pelo uso deste equipamento devem estar assegurar que cada aplicação pretendida para este equipamento seja aceitável.
Em nenhuma circunstância a Rockwell Automation, Inc. será responsável por danos indiretos ou conseqüentes resultantes do uso ou aplicação deste equipamento.
Os exemplos e diagramas neste manual estão incluídos somente para fins ilustrativos. Devido às diversas variáveis e exigências associadas com cada instalação em particular, a Rockwell Automation, Inc. não pode assumir nenhuma responsabilidade pelo uso real com base nos exemplos e diagramas.
A Rockwell Automation, Inc. não assume nenhuma responsabilidade de patente com respeito ao uso de informações, circuitos, equipamentos ou software descritos neste manual.
Fica proibida a reprodução do conteúdo deste manual, no todo ou em parte, sem a permissão por escrito da Rockwell Automation, Inc.
Ao longo deste manual usamos notas para alertá-lo sobre considerações de segurança, quando se fazem necessárias.
Importante: Identifica as informações críticas para a aplicação bem-sucedida e entendimento do produto.
DriveExplorer, DriveExecutive, Force Technology e SCANport são marcas comerciais da Rockwell Automation, Inc.PowerFlex e PLC são marcas registradas da Rockwell Automation, Inc.ControlNet é uma marca comercial da ControlNet International, Ltd.DeviceNet é uma marca comercial da Open DeviceNet Vendor Association.
ADVERTÊNCIA: Identifica informações sobre práticas ou circunstâncias que podem causar explosão em ambientes perigosos, podendo resultar em lesões pessoais ou morte, danos à propriedade ou prejuízos.
ATENÇÃO: Identifica informações sobre práticas ou circunstâncias que podem resultar em lesões pessoais ou morte, danos à propriedade ou prejuízos. Os avisos de atenção lhe ajudam a:• identificar perigos• evitar perigos• reconhecer as conseqüências
As etiquetas de Perigo de Choque podem estar localizadas sobre ou no interior do equipamento (p.ex., no inversor ou motor) para alertar as pessoas quanto à presença de tensões perigosas.
As etiquetas de Perigo de Queimadura podem estar localizadas sobre ou no interior do equipamento (p.ex., no inversor ou motor) para alertar as pessoas que as superfícies podem se encontrar em temperaturas perigosas.

Sumário das alterações
As informações abaixo resumem as alterações feitas no Manual do Usuário do PowerFlex 700, publicação 20B-UM001, desde sua última edição.
Atualizações do manual
Alteração PáginaFoi adicionada uma declaração de atenção referente ao bypass P-3Atualização da explicação do número de catálogo P-4Atualização da seção de montagem 1-2Descrição da terminação de proteção foi atualizada 1-4Especificações do bloco de terminais de potência atualizadas 1-9Atualização da tabela de fios de sinais recomendados 1-15Notas Gerais da CE e Tabela 1.I atualizadas 1-25Atualização do indicador de status “Piscando, inversor parado” 2-2 & 4-2Atualização da descrição do parâmetro [Pto Ajuste Saída Dig] 3-58Atualização da ação No. 3 “Inibição de Desacel” 4-5Foi adicionada a especificação de pressão do som A-2Números de catálogo do dispositivo de arranque do motor atualizados A-8 a A-12

sda-ii Sumário das alterações
Notas:

Índice
Prefácio Visão Geral Quem deve usar este manual? . . . . . . . . . . . . . . . P-1O que não está incluído neste manual . . . . . . . . . P-1Materiais de referência . . . . . . . . . . . . . . . . . . . . P-2Convenções usadas neste manual . . . . . . . . . . . . P-2Tamanhos de gabinete do inversor . . . . . . . . . . . P-3Precauções gerais . . . . . . . . . . . . . . . . . . . . . . . . P-3Explicação do número de catálogo . . . . . . . . . . . P-4
Capítulo 1 Instalação/Fiação Abertura da tampa. . . . . . . . . . . . . . . . . . . . . . . . . 1-1Considerações de montagem. . . . . . . . . . . . . . . . . 1-2Considerações sobre a fonte de alimentação CA . . . . . . . . . . . . . . . . . . . . . . . 1-2
Requisitos gerais de aterramento . . . . . . . . . . . . . 1-4Fusíveis e disjuntores . . . . . . . . . . . . . . . . . . . . . . 1-5Fiação de potência. . . . . . . . . . . . . . . . . . . . . . . . . 1-5Utilização de contatores de entrada/saída . . . . . . 1-12Desconexão de MOVs e capacitores de modo comum (CM) . . . . . . . . . . . . . . . . . . . 1-13
Fiação de E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-15Controle de referência. . . . . . . . . . . . . . . . . . . . . 1-22Exemplos de Auto/Manual . . . . . . . . . . . . . . . . . 1-23Prova de torque/elevação. . . . . . . . . . . . . . . . . . . 1-24Notas sobre pré-carga/barramento comum . . . . . 1-24Instruções de compatibilidade eletromagnética (EMC). . . . . . . . . . . . . . . . . . . 1-25
Capítulo 2 Energização Energização do inversor . . . . . . . . . . . . . . . . . . . . 2-1Indicadores de status . . . . . . . . . . . . . . . . . . . . . . . 2-2Rotinas de energização . . . . . . . . . . . . . . . . . . . . . 2-3Operação de energização S.M.A.R.T. . . . . . . . . . . 2-4Operação de energização com auxílio. . . . . . . . . . 2-4
Capítulo 3 Programaçãoe Parâmetros
Informações sobre os parâmetros . . . . . . . . . . . . . 3-1Como os parâmetros são organizados . . . . . . . . . . 3-3Arquivo de Monitoração . . . . . . . . . . . . . . . . . . . 3-12Arquivo de Controle do Motor . . . . . . . . . . . . . . 3-14Arquivo do Comando de Velocidade . . . . . . . . . 3-21Arquivo de Controle Dinâmico . . . . . . . . . . . . . . 3-31Arquivo Utilitário . . . . . . . . . . . . . . . . . . . . . . . . 3-38Arquivo de Comunicação . . . . . . . . . . . . . . . . . . 3-49Arquivo de Entradas e Saídas . . . . . . . . . . . . . . . 3-53Arquivo de Aplicações . . . . . . . . . . . . . . . . . . . . 3-59Referência cruzada de parâmetros - por Nome . . . . . . . . . . . . . . . . . . . 3-61
Referência cruzada de parâmetros - por Número . . . . . . . . . . . . . . . . . 3-64
Capítulo 4 Identificação e Solução de Problemas
Falhas e alarmes . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1Status do inversor . . . . . . . . . . . . . . . . . . . . . . . . . 4-2Remoção manual das falhas . . . . . . . . . . . . . . . . . 4-4Descrições de falhas . . . . . . . . . . . . . . . . . . . . . . . 4-4Remoção de alarmes . . . . . . . . . . . . . . . . . . . . . . . 4-9Descrições dos Alarmes . . . . . . . . . . . . . . . . . . . 4-10Sintomas comuns/Ações Corretivas . . . . . . . . . . 4-13Funções e códigos de pontos de teste . . . . . . . . . 4-16
Apêndices Veja a página seguinte

ii Índice
Apêndice A Informações suplementaressobre o inversor
Especificações. . . . . . . . . . . . . . . . . . . . . . . . . . . A-1Configurações de Comunicação . . . . . . . . . . . . . A-4Dispositivo de saída . . . . . . . . . . . . . . . . . . . . . . A-7Classificações de fusíveis e disjuntores do inversor . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-7
Dimensões . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-15Referência cruzada dos gabinetes. . . . . . . . . . . A-22
Apêndice B Visão geral da HIM Conexões externas e internas . . . . . . . . . . . . . . . B-1Elementos de display do LCD . . . . . . . . . . . . . . B-2Funções ALT. . . . . . . . . . . . . . . . . . . . . . . . . . . . B-2Estrutura do Menu . . . . . . . . . . . . . . . . . . . . . . . B-3Visualização e edição de parâmetros . . . . . . . . . B-5Como fazer o link de parâmetros (somente na opção com controle vetorial) . . . . B-6
Remoção/Instalação da HIM . . . . . . . . . . . . . . . B-8
Apêndice C Notas do aplicativo Resistor de freio externo. . . . . . . . . . . . . . . . . . . C-1Prova de torque/elevação . . . . . . . . . . . . . . . . . . C-2Velocidade Mínima. . . . . . . . . . . . . . . . . . . . . . . C-7Tecnologia de controle do motor . . . . . . . . . . . . C-8Sobrecarga do motor. . . . . . . . . . . . . . . . . . . . . C-10Sobrevelocidade . . . . . . . . . . . . . . . . . . . . . . . . C-11Percurso de perda de energia . . . . . . . . . . . . . . C-12Processo PI para controle padrão . . . . . . . . . . . C-13Limite de velocidade reversa . . . . . . . . . . . . . . C-16Freqüência de inibição . . . . . . . . . . . . . . . . . . . C-17Modo Inativo-Ativo . . . . . . . . . . . . . . . . . . . . . C-19Partida na Energização . . . . . . . . . . . . . . . . . . . C-21Modo de Parada . . . . . . . . . . . . . . . . . . . . . . . . C-22Tolerância de tensão . . . . . . . . . . . . . . . . . . . . . C-24
Índice remissivo

Prefácio
Visão Geral
A finalidade deste manual é fornecer as informações básicas necessárias para instalar, colocar em funcionamento, identificar e solucionar problemas do Inversor CA de Freqüência Ajustável Powerflex 700.
Este manual se destina ao pessoal qualificado. Você deve ter condições de programar e operar os dispositivos do Inversor CA de Freqüência Ajustável. Além disso, você deve compreender as funções e configurações dos parâmetros.
O Manual do Usuário do PowerFlex 700 tem o propósito de fornecer somente informações básicas sobre a energização. Para informações mais detalhadas sobre o inversor, consulte o Manual de Referência do PowerFlex. O manual de referência está incluído no CD que acompanha o seu inversor e está também disponível online em http://www.rockwellautomation.com/literature.
Para informações sobre...Consulte a página...
Quem deve usar este manual? P-1O que não está incluído neste manual P-1Materiais de Referência P-2Convenções usadas neste Manual P-2Tamanhos de gabinete do inversor P-3Precauções Gerais P-3Explicação do Número de Catálogo P-4
Quem deve usar este manual?
O que não está incluído neste manual

P-2 Visão Geral
Recomendam-se os seguintes manuais para informações gerais sobre o inversor:
Para obter informações detalhadas sobre o PowerFlex 700:
Para assistência técnica dos inversores Allen-Bradley:
• Neste manual fazemos referência ao Inversor CA de Freqüência Ajustável PowerFlex 700 utilizando os termos inversor, PowerFlex 700 ou Inversor PowerFlex 700.
• As seguintes convenções serão usadas para auxiliar a diferenciar entre os nomes de parâmetros e o texto exibido pela tela de LCD de outros tipos de texto:
– Nomes de Parâmetros aparecerão em [colchetes]. Por exemplo: [Tensão no Barramento CC].
– O texto de exibição aparecerá “entre aspas”. Por exemplo: “Ativado.”
• As seguintes palavras foram utilizadas ao longo deste manual para descrever uma ação:
Materiais de Referência
Título Publicação Disponível online em...Wiring and Grounding Guidelines for PWM AC Drives (Diretrizes de Fiação e Aterramento para Inversores PMW CA)
DRIVES-IN001…
www.rockwellautomation.com/literature
Preventive Maintenance of Industrial Control and Drive System Equipment
DRIVES-TD001…
Safety Guidelines for the Application, Installation and Maintenance of Solid State Control
SGI-1,1
A Global Reference Guide for Reading Schematic Diagrams
100-2,10
Guarding Against Electrostatic Damage 8000-4,5,2
Título Publicação Disponível...Manual de Referência do PowerFlex
PFLEX-RM001… no CD que acompanha o inversor ou em www.rockwellautomation.com/literature
Título Online em...Assistência técnica para os inversores Allen-Bradley
www.ab.com/support/abdrives
Convenções usadas neste Manual
Palavra SignificadoCan Possible, able to do somethingCannot Not possible, not able to do somethingMay Permitted, allowedMust Unavoidable, you must do thisShall Required and necessaryShould RecomendadoShould Not Not Recommended

Visão Geral P-3
Dimensões similares do inversor PowerFlex 700 são agrupadas em tamanhos de gabinete para simplificar o pedido de peças sobressalentes, dimensionamento, etc. Uma referência cruzada dos números de catálogo do inversor e de seus respectivos tamanhos de gabinete é fornecida no Apêndice A.
Tamanhos de gabinete do inversor
Precauções Gerais
!ATENÇÃO: Este inversor contém peças e conjuntos sensíveis à ESD (Electrostatic Discharge - Descarga Eletrostática). Precauções de controle da estática são necessárias durante a instalação, testes, serviços ou reparos deste conjunto. Se os procedimentos de controle da ESD não forem observados, poderão ocorrer danos nos componentes. Caso você não esteja familiarizado com os procedimentos de controle estático, consulte a Publicação 8000-4,5,2 da A-B, “Guarding Against Electrostatic Damage”, ou qualquer outro manual de proteção contra a ESD adequado.
!ATENÇÃO: Um inversor indevidamente utilizado ou instalado pode causar danos nos componentes ou a redução da vida útil do produto. Erros de fiação e aplicação tais como o subdimensionamento do motor, alimentação de CA incorreta ou inadequada, ou temperaturas ambientes excessivas podem resultar em um funcionamento indevido do sistema.
!ATENÇÃO: Apenas o pessoal qualificado com inversores CA de freqüência ajustável e mecanismos associados deve planejar ou implementar a instalação, a energização e a manutenção subseqüente do sistema. Se isso não for observado, poderá ocorrer lesão pessoal e/ou dano no equipamento.
!ATENÇÃO: Para evitar o perigo de choque elétrico, verifique se a tensão nos capacitores de barramento foi descarregada antes de iniciar a execução de qualquer trabalho no inversor. Meça a tensão no barramento CC nos terminais +CC e –CC do Bloco de Terminais de Potência (consulte o Capítulo 1 quanto à sua localização). A tensão deve ser zero.
!ATENÇÃO: Há risco de lesões ou danos no equipamento. Os produtos dos hosts DPI ou SCANport não devem ser conectados diretamente através dos cabos 1202. Poderá resultar um comportamento imprevisível quando dois ou mais dispositivos forem conectados dessa maneira.
!ATENÇÃO: Um sistema de bypass indevidamente utilizado ou instalado pode causar danos nos componentes ou a redução da vida útil do produto. As causas mais comuns são:• fiação da linha CA aos terminais de controle ou saída do inversor.• bypass indevido ou circuitos de saída não aprovados pela Allen-Bradley.• circuitos de saída que não conectam diretamente ao motor.Entre em contato com a Allen-Bradley para receber auxílio com a aplicação ou fiação.

P-4 Visão Geral
O esquema da numeração do catálogo do PowerFlex 700 é indicado na página P-5.
!ATENÇÃO: A opção “ajustar freq” da função do regulador de barramento é extremamente útil para evitar falhas de sobretensões indesejáveis resultantes de desacelerações agressivas, cargas de arraste e cargas excêntricas. Isso força a freqüência de saída a ser maior do que a freqüência comandada enquanto a tensão de barramento do inversor estiver aumentando para níveis que, em outras situações, causariam uma falha. Entretanto, poderia causar também uma das duas condições a seguir:
1. Mudanças positivas rápidas na tensão de entrada (aumento superior a 10% dentro de 6 minutos) podem causar alterações de velocidade positivas não comandadas. Entretanto, ocorrerá uma falha de “Limite de Sobrevelocidade” se a velocidade atingir [Velocidade Max.] + [Limite Sobrev]. Se esta condição for inaceitável, devem-se tomar medidas para 1) limitar as tensões de alimentação dentro das especificações do inversor e, 2) limitar as variações rápidas de tensão de entrada positivas para menos de 10%. Sem tomar essas medidas, no caso da operação ser inaceitável, a opção “ajustar freq” da função do regulador de barramento deve ser desativada (consulte os parâmetros 161 e 162).
2. Os tempos reais de desaceleração podem ser mais longos de que os tempos de desaceleração comandados. Entretanto, ocorre uma falha de “Inibição da Desacel” se o inversor deixar de desacelerar totalmente. Se essa condição for inaceitável, a opção “ajustar freq” da função do regulador de barramento deve ser desativada (consulte os parâmetros 161 e 162). Além disso, a instalação de um resistor de frenagem dinâmica de tamanho adequado proporcionará um desempenho igual ou superior na maioria dos casos.Importante: Essas falhas não são instantâneas. Resultados de testes têm
demonstrado que levam entre 2 e 12 segundos para que ocorram.
!ATENÇÃO: A perda de controle em aplicações de cargas suspensas pode causar lesões pessoais e/ou danos no equipamento. As cargas devem sempre ser controladas pelo inversor ou por um freio mecânico. Os parâmetros 600-611 foram projetados para aplicações de prova de torque/elevação. O engenheiro e/ou usuário final é responsável pela configuração dos parâmetros do inversor, testar toda funcionalidade de elevação e atender os requisitos de segurança de acordo com todos os códigos e padrões que se apliquem.
Explicação do Número de Catálogo

Visão Geral P-5
Códi
goTe
nsão
Fase
Pré-
carg
B24
0V C
A3
–C
400V
CA
3–
D48
0V C
A3
–E
600V
CA
➌3
–F
690V
CA
3–
H54
0V C
C➍
–N
J65
0V C
C➍
–N
P54
0V C
C➍
–S
R65
0V C
C➍
–S
Códi
goC
ontro
le V
olts
E/S
APa
drão
24V
CC
/CA
BPa
drão
115V
CA
CVe
toria
l➎24
V C
C/C
AD
Veto
rial➎
115V
CA
NPa
drão
Nen
hum
Códi
goVe
rsão
CC
ontro
lNet
(Coa
x)D
Dev
iceN
etE
Ethe
rNet
/IPR
RIO
SR
S-48
5N
Nen
hum
Códi
goIn
terfa
ce d
o Op
erad
or0
Tam
pa C
ega
2LC
D D
igita
l3
LCD
Tot
alm
ente
N
umér
ico
4LC
D A
naló
gico
5LC
D s
omen
te d
e pr
ogra
maç
ão
Códi
goc/
Resi
stor
Y S
im➊
N N
ão
Códi
goFi
ltro
CEEs
trang
ulad
or C
MA
Sim
Sim
BSi
mN
ão
Códi
goTi
po0
Nen
hum
1En
code
r, 12
V
Códi
goG
abin
ete
AIP
20,
N
EMA
Tipo
1N
Aber
to
Códi
goc/
Frei
o IG
BT➋
Y S
imN
Não
➊N
ão e
stá
disp
onív
el p
ara
inve
rsor
es c
om g
abin
ete
3 ou
mai
ores
.➋
O fr
eio
IGBT
é p
adrã
o no
s in
vers
ores
com
gab
inet
es 0
-3 e
opc
iona
l com
os
gabi
nete
s 4-
6.➌
Not
a: O
test
e de
cer
tific
ação
da
norm
a C
E nã
o fo
i rea
lizad
o no
s in
vers
ores
com
cla
ssifi
caçã
o de
600
V.
➍G
abin
etes
5 e
6 s
omen
te.
➎A
opçã
o de
con
trole
vet
oria
l util
iza
som
ente
DPI
.➏
Dev
e se
r usa
do c
om a
opç
ão d
e co
ntro
le v
etor
ial C
ou
D (p
osiç
ão 1
5). A
s po
siçõ
es 1
7-20
são
ne
cess
ária
s so
men
te q
uand
o fo
r for
neci
do u
m fi
rmw
are
pers
onal
izad
o.
➐As
pos
içõe
s 16
-20
do n
úmer
o de
cat
álog
o nã
o se
apl
icam
no
Can
adá.
No
Can
adá,
ess
as
opçõ
es (p
osiç
ões
16-2
0) s
e en
cont
ram
dis
poní
veis
som
ente
qua
ndo
inst
alad
as p
elo
usuá
rio.
Códi
goTi
poA
Man
ual d
o U
suár
ioN
Sem
man
ual
Cód
igo
Tipo
20B
700
Entra
da d
e 40
0V 6
0Hz
400V
Códi
goA
mps
kW1P
31,
30,
372P
12,
10,
753P
53,
51,
55P
05,
02,
28P
78,
74,
001
111
,55,
501
515
,47,
502
222
1103
030
1503
737
18,5
043
4322
056
5630
072
7237
085
8545
105
105
5512
512
555
140
140
7517
017
090
205
205
110
260
260
132
Entra
da d
e 60
0V 6
0Hz➌
600V
Códi
goAm
psHP
1P7
1,7
1,0
2P7
2,7
2,0
3P9
3,9
3,0
6P1
6,1
5,0
9P0
9,0
7,5
011
1110
017
1715
022
2220
027
2725
032
3230
041
4140
052
5250
062
6260
077
7775
099
9910
012
512
512
514
414
415
0
Entra
da d
e 20
8/24
0V 6
0Hz
208V
2
40V
Códi
goAm
psAm
psH
P2P
22,
52,
20,
54P
24,
84,
21,
06P
87,
86,
82,
09P
611
9,6
3,0
015
17,5
15,3
5,0
022
25,3
227,
502
832
,228
1004
248
,342
1505
256
5220
070
78,2
7025
080
9280
3010
412
010
440
130
130
130
5015
417
715
460
192
221
192
75
Entra
da d
e 69
0V 6
0Hz
690V
Cód
igo
Am
pskW
052
5245
060
6055
082
8275
098
9890
119
119
110
142
142
132
Entra
da d
e 48
0V 6
0Hz
480V
Códi
goA
mps
HP1P
11,
10,
52P
12,
11,
03P
43,
42,
05P
05,
03,
08P
08,
05,
001
111
7,5
014
1410
022
2215
027
2720
034
3425
040
4030
052
5240
065
6550
077
7760
096
9675
125
125
100
156
156
125
180
180
150
248
248
200
Códi
goTi
poAD
➏60
Hz
máx
imo
Posi
ção
1-3
45-
78
910
1112
1314
1516
➐17
-18➐
19-2
0➐
20B
D2P
1A
3A
YN
AR
C0
NNAD
Inve
rsor
Cla
sse
de te
nsão
Cla
ssifi
caçã
oG
abin
ete
HIM
Doc
umen
taçã
oFr
eio
Res
isto
r de
freio
Emis
são
Slot
com
unE/
SFe
edba
ckPa
ra u
so
futu
roFi
rmw
are
pers
onal
izad
o

P-6 Visão Geral
Notas:

Capítulo 1
Instalação/Fiação
Este capítulo fornece as informações sobre a montagem e a instalação elétrica do Inversor PowerFlex 700.
A maioria das dificuldades de energização resulta da fiação incorreta. Devem-se tomar todas as precauções possíveis para assegurar que a fiação seja feita de acordo com as instruções. Todos os itens devem ser lidos e compreendidos antes de iniciar a instalação.
Para informações sobre...Consulte a página... Para informações sobre...
Consulte a página...
Abertura da tampa 1-1 Desconexão de MOVs e Capacitores de Modo Comum
1-13
Considerações de Montagem 1-2
Considerações sobre a fonte de alimentação CA 1-2 Fiação de E/S 1-15
Requisitos Gerais de Aterramento 1-4 Controle de referência 1-22
Fusíveis e Disjuntores 1-5 Exemplos de Auto/Manual 1-23
Fiação de Potência 1-5 Prova de torque/elevação 1-24
Instruções de Compatibilidade Eletromagnética (EMC)
1-25
!ATENÇÃO: As informações seguintes são simplesmente orientações para uma instalação adequada. A Allen-Bradley Company não pode assumir responsabilidade pelo atendimento ou não a códigos nacionais, locais ou outros, para a devida instalação deste inversor ou equipamento relacionado. Existe o risco de lesões pessoais e/ou danos no equipamento se tais códigos forem ignorados durante a instalação.
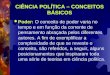
Abertura da tampa
Esc
7 8 9
4 5 6
1 2 3
. 0 +/-
Sel
Jog
Alt
POWER
STS
PORT
MOD
NET A
NET B
Exp Param #
S.M.A.R.T. Exit Lang Auto / Man Remove
HOT surfaces can cause severe burns
CAUTION
Gabinetes 0-4Localize a ranhura no canto superior esquerdo. Deslize a lingüeta de segurança para cima e abra a tampa. Dobradiças especiais permitem afastar a tampa do inversor e colocá-la acima do inversor adjacente (se houver). Consulte a página 1-7 quanto à remoção do painel de acesso do gabinete 4.Gabinete 5Deslize a lingüeta de segurança para cima, afrouxe o parafuso do lado direito da tampa e remova. Consulte a página 1-7 quanto à remoção do painel de acesso.Gabinete 6Afrouxe os 2 parafusos na parte inferior da tampa do inversor. Deslize cuidadosamente a tampa inferior para baixo e para fora. Afrouxe os 2 parafusos na parte superior da tampa e retire-a.

1-2 Instalação/Fiação
Temperaturas de operaçãoOs inversores PowerFlex 700 são projetados para operar em temperaturas ambientes de 0° a 40° C. Para operar o inversor em instalações entre 41° e 50° C, consulte abaixo.
Tabela 1.A Temperatura aceitável do ar circundante e ações requeridas
Espaçamentos Mínimos de MontagemOs requisitos de espaçamento vertical especificados são de inversor para inversor. Outros objetos poderão ocupar este espaço, mas um fluxo de ar reduzido poderá fazer com que os circuitos de proteção provoquem falhas no inversor. Além disso, a temperatura do ar de entrada não deve ultrapassar a de especificação do produto.
Os inversores PowerFlex 700 são adequados para o uso em um circuito capaz de fornecer uma corrente simétrica efetiva (rms) máxima de 200.000 ampères e um máximo de 600 volts.
Considerações de Montagem
Número de catálogo do inversor
Ação requerida...IP 20, NEMA Tipo 1(1) IP 20, NEMA Tipo aberto IP 00, NEMA Tipo aberto
Nenhum ação requeridaRemover a etiqueta superior(2)
Remover a etiqueta superior e a placa de ventilação(3)
Todos exceto 20BC072 40° C 50° C NA
20BC072 40° C 45° C 50° C
(1) Os gabinetes para uso geral IP 20 (NEMA Tipo 1) são projetados principalmente para o uso em áreas internas, a fim de proporcionar um grau de proteção contra o contato com os equipamentos integrados. Esses gabinetes não oferecem proteção contra contaminantes transportados pelo ár, como a poeira, ou contra a água.
(2) A remoção da etiqueta adesiva superior do inversor muda a classificação do gabinete NEMA de Tipo 1 para Tipo Aberto.(3) Parar remover a placa de ventilação (consulte a página A-20 quanto à localização), levante a borda superior da placa do chassi.
Gire a placa para fora da placa posterior.
101,6 mm(4,0 pol.)
101,6 mm(4,0 pol.)
50,8 mm(2,0 pol.)
101,6 mm(4,0 pol.)
101,6 mm(4,0 pol.)
PWR
STS
PORT
MOD
NET A
NET B
PWR
STS
PORT
MOD
NET A
NET B
Consulte o Apêndice A para informações mais detalhadas das dimensões.
Sem etiqueta adesiva(consulte a Tabela 1.A)
Com etiqueta adesiva(consulte a Tabela 1.A)
101,6 mm(4,0 pol.)
101,6 mm(4,0 pol.)
101,6 mm(4,0 pol.)
101,6 mm(4,0 pol.)
PWR
STS
PORT
MOD
NET A
NET B
PWR
STS
PORT
MOD
NET A
NET B
Considerações sobre a fonte de alimentação CA

Instalação/Fiação 1-3
Se um monitor de falha do sistema de aterramento elétrico (RCD) for ser utilizado, use somente os dispositivos Tipo B (ajustáveis) para evitar disparos indesejados.
Sistemas de Distribuição Não Equilibrados ou Não AterradosSe a tensão fase-terra exceder 125% da tensão linha-linha normal ou se o sistema de alimentação não for aterrado, consulte as Wiring and Grounding Guidelines for PWM AC Drives (publicação DRIVES-IN001).
Condicionamento da Potência de EntradaAlguns eventos no circuito de potência que alimenta o inversor podem causar danos nos componentes ou redução da vida útil do produto. Essas condições se dividem em 2 categorias básicas:
1. Todos os inversores
– O circuito de potência possui capacitores de correção do fator de potência comutados dentro e fora do sistema, pelo usuário ou pela companhia de energia elétrica.
– A a fonte de potência possui picos de tensão intermitentes com valores superiores a 6000 volts. Esses picos podem ser causados por outros equipamentos na linha ou por eventos como relâmpagos.
– A fonte de alimentação possui interrupções freqüentes.
2. Inversores de 5 ou menos HP (além do item “1” acima)
– O transformador de alimentação mais próximo é maior que 100,000 VA ou a corrente de curto-circuito (falha) é superior a 100.000 A.
– A impedância na frente do inversor é menor que 0,5%.
Se uma ou todas estas condições estiverem presentes, recomenda-se que o usuário instale uma quantidade mínima de impedância entre o inversor e a fonte. Esta impedância poderia vir do próprio transformador de alimentação, do cabo entre o transformador e inversor, ou de um transformador ou reator adicional. A impedância pode ser calculada utilizando-se as informações fornecidas nas Wiring and Grounding Guidelines for PWM AC Drives, publicação DRIVES-IN001.
!ATENÇÃO: Para a proteção contra lesão pessoal e/ou dano no equipamento causado pela seleção incorreta de fusíveis ou disjuntores, use somente os fusíveis de linha/disjuntores especificados no Apêndice A.
!ATENÇÃO: Os inversores PowerFlex 700 possuem MOVs de proteção e capacitores de modo comum recomendados para o aterramento. Esses dispositivos devem ser desconectados se o inversor for instalado em um sistema de distribuição não aterrado. Consulte a página 1-13 quanto à localização dos jumpers.

1-4 Instalação/Fiação
O aterramento de segurança do inversor - PE deve ser conectado ao aterramento do sistema. A impedância de aterramento deve atender os requisitos dos regulamentos de segurança industrial e/ou os códigos de instalações elétricas nacionais e locais. A integridade de todas as conexões de aterramento deve ser verificada periodicamente.
Para instalações dentro de um gabinete, deve-se usar um único ponto de aterramento de segurança ou uma barra coletora de aterramento conectada diretamente ao aço da estrutura do prédio. Todos os circuitos, incluindo o condutor de terra de entrada de CA, devem ser aterrados independente e diretamente a este ponto/barra.
Figura 1.1 Aterramento típico
Aterramento de Segurança - PEEste aterramento de segurança para o inversor é exigido por código. Este ponto deve ser conectado ao aço estrutural do prédio adjacente (vigas), a uma haste de aterramento ou barra coletora (veja acima). Os pontos de aterramento devem atender os regulamentos de segurança industrial e/ou os códigos de instalações elétricas nacionais e locais.
Terminação de Proteção (Shield Termination - SHLD)O terminal Shield (de proteção) (consulte a Figura 1.3 na página 1-10) fornece um ponto de aterramento para a proteção do cabo do motor. A proteção do cabo do motor deve ser conectada a este terminal no inversor (extremidade do inversor) e na estrutura do motor (extremidade do motor). Um prensa-cabos de terminação de proteção pode também ser usado.
Quando um cabo blindado for usado para fiação de sinal e controle, a proteção deve ser aterrada somente na extremidade da fonte, não na extremidade do inversor.
Aterramento de Filtro RFIO uso de um filtro RFI opcional pode resultar em correntes de fuga de terra relativamente elevadas. Desta forma, o filtro deve ser usado somente em instalações com sistemas de alimentação de CA aterrados, deve ser instalado de maneira permanente e com aterramento sólido (conectado) ao terra de distribuição de energia do prédio. Certifique-se de que o neutro de alimentação de entrada esteja conectado de maneira sólida ao mesmo terra de distribuição de energia do prédio. O aterramento não deve depender de cabos flexíveis e não deve incluir nenhum tipo de plugue ou soquete que possa permitir a desconexão. Alguns dos códigos locais podem exigir conexões de aterramento redundantes. A integridade de todas as conexões deve ser verificada periodicamente. Consulte as instruções que acompanham o filtro.
Requisitos Gerais de Aterramento
U (T1)V (T2)W (T3)
R (L1)S (L2)T (L3)
PE
SHLD

Instalação/Fiação 1-5
O PowerFlex 700 pode ser instalado com fusíveis ou com um disjuntor de entrada. Os regulamentos de segurança industrial e/ou os códigos para instalações elétricas nacionais e locais podem estipular exigências adicionais para essas instalações. Consulte o Apêndice A quanto aos fusíveis/disjuntores recomendados.
Tipos de cabo aceitáveis para instalações de 200-600 VoltsUma grande variedade de tipos de cabo são aceitáveis para as instalações do inversor. Para muitas instalações o cabo sem blindagem é adequado, desde que possa ser separado dos circuitos sensíveis. Como orientação aproximada, permita um espaçamento de 0,3 metro (1 pé) para cada 10 metros (32,8 pés) de comprimento. Em todos os casos, devem-se evitar instalações paralelas de grandes extensões. Não use cabos com espessura de isolamento igual ou inferior a 15 mils (0,4 mm/0,015 pol.). Use somente fios de cobre. Os requisitos de bitola e recomendações se baseiam na temperatura de 75 graus Celsius. Não reduza a bitola do fio ao usar fios resistentes a temperaturas mais elevadas.
Sem blindagem
Fios THHN, THWN ou similares é aceitável para a instalação do inversor em ambientes secos, desde que haja um espaço de ar livre apropriado e/ou sejam fornecidos limites de classificação do enchimento de conduíte. Não use fio THHN ou com revestimento similar em áreas úmidas. Todo fio selecionado deve possuir uma espessura mínima de isolamento de 15 mils e não deve ter grandes variações na concentricidade do isolamento.
Fusíveis e Disjuntores
!ATENÇÃO: O PowerFlex 700 não oferece proteção contra curto-circuito de derivação. As especificações para o fusível ou disjuntor recomendado para fornecer proteção contra curtos-circuitos se encontram no Apêndice A.
Fiação de Potência
!ATENÇÃO: Os códigos e padrões nacionais (NEC, VDE, BSI, etc.) e os códigos locais estabelecem relações para a instalação segura de equipamentos elétricos. A instalação deve atender as especificações no que se refere aos tipos de fios, tamanhos de condutores, proteção de circuitos de derivação e dispositivos de desconexão. Se isto não for observado, poderá ocorrer lesão pessoal e/ou dano no equipamento.

1-6 Instalação/Fiação
Cabo Blindado/Protegido
O cabo blindado apresenta todas as vantagens gerais de um cabo multicondutor, mas com o benefício adicional de uma proteção trançada de cobre que pode conter grande parte do ruído gerado por um inversor CA típico. O cabo blindado deve ser seriamente considerado para instalações com equipamentos sensíveis, como balanças para pesar, chaves de proximidade capacitivas e outros dispositivos que possam ser afetados pelo ruído elétrico no sistema de distribuição. Aplicações com um número elevado de inversores em um local similar, regulamentos impostos pela EMC ou um nível elevado de comunicações/redes também são boas candidatas para a utilização de cabo blindado.
O cabo blindado pode também ajudar a reduzir a tensão do eixo e correntes induzidas do mancal para algumas aplicações. Além disso, a impedância elevada de um cabo blindado pode ajudar a aumentar a distância da localização entre o motor e inversor sem a adição de dispositivos de proteção do motor como redes de terminadores. Consulte Reflected Wave (Onda refletida) nas “Wiring and Grounding Guidelines for PWM AC Drives” (Diretrizes de Fiação e Aterramento para Inversores PMW CA), publicação DRIVES-IN001A-EN-P.
Devem-se levar em consideração todas as especificações gerais ditadas pelo ambiente de instalação, incluindo a temperatura, flexibilidade, características de umidade e resistência química. Além disso, o fabricante do cabo deverá especificar e incluir uma proteção trançada com cobertura de pelo menos 75%. Uma proteção laminada adicional pode melhorar a contenção de ruído de maneira significativa.
Um bom exemplo de cabo recomendado é o Belden® 295xx (xx determina a bitola). Este cabo possui quatro (4) condutores isolados XLPE com 100% de lâmina de cobertura e 85% de cobertura de proteção trançada de cobre (com fio-dreno) envoltos por uma camisa de PVC.
Há outros tipos de cabos blindados disponíveis, mas a sua seleção poderá limitar o comprimento de cabo permitido. Particularmente, alguns dos cabos mais novos torcem 4 condutores de fio THHN envolvendo-os firmemente com uma proteção de lâmina. Esta construção pode aumentar enormemente a corrente de carga do cabo necessária e reduzir o desempenho geral do inversor. Exceto quando especificados nas tabelas de distâncias individuais de acordo com testes realizados no inversor, estes cabos não são recomendados e seu desempenho em relação aos limites de comprimento do cabo fornecidos é desconhecido.
Consulte a Tabela 1.B.
Tabela 1.B Fio blindado recomendado
Localização Classificação/Tipo Descrição
Padrão (Opção 1) 600V, 90 °C (194 °F)XHHW2/RHW-2Anixter B209500-B209507, Belden 29501-29507, ou equivalente
• Quatro condutores estanhados de cobre com isolamento XLPE.• Fio-dreno estanhado de cobre e proteção combinada de cobre trançado/
papel de alumínio.• Capa de PVC.

Instalação/Fiação 1-7
Atendimento à Compatibilidade Eletromagnética (EMC)
Consulte as Instruções de Compatibilidade Eletromagnética (EMC) na página 1-25 para obter maiores detalhes.
Conduíte e Suportes de Cabos
Se houver necessidade de utilizar conduítes grandes ou suportes de cabo, consulte as orientações apresentadas nas Wiring and Grounding Guidelines for PWM AC Drives, publicação DRIVES-IN001.
Comprimentos dos Cabos do MotorEm geral, cabos de motor com menos de 91 metros (300 pés) são aceitáveis. Entretanto, se a sua aplicação necessitar de comprimentos superiores, consulte Wiring and Grounding Guidelines for PWM AC Drives, publicação DRIVES-IN001.
Remoção da Placa de Entrada de CabosSe for necessário um acesso adicional para a fiação, pode-se remover a Placa de Entrada de Cabos nos inversores com os Gabinetes 0-3. Basta afrouxar os parafusos que prendem a placa ao chassi. Os orifícios de montagem com ranhuras facilitam a remoção.
Importante: A remoção da placa de entrada de cabos limita a temperatura ambiente máxima a 40 graus Celsius (104 graus Fahrenheit).
Remoção do painel de acesso da fiação de potência
Padrão (Opção 2) Suporte com classificação de 600V, 90 °C (194 °F) RHH/RHW-2Anixter OLF-7xxxxx ou equivalente
• Três condutores de cobre estanhado com isolamento XLPE.• Fita de cobre helicoidal simples de 5 mil (sobreposição mínima de 25%)
com três terras de cobre sem revestimento em contato com a proteção.• Capa de PVC.
Classe I & II;Divisão I & II
Suporte com classificação de 600V, 90 °C (194 °F) RHH/RHW-2Anixter 7V-7xxxx-3G ou equivalente
• Três condutores de cobre sem revestimento com isolamento XLPE e armadura de alumínio com solda corrugada contínua e selada.
• Capa de PVC preta resistente à luz solar.• Três terras de cobre em #10 AWG e menores.
Localização Classificação/Tipo Descrição
!ATENÇÃO: Para evitar possíveis perigos de choque causados por tensões induzidas, os fios que não são utilizados no conduíte devem ser aterrados em ambas as extremidades. Por este mesmo motivo, ao se realizar serviços de manutenção ou instalação em um inversor que está compartilhando um conduíte, todos os inversores que utilizam esse conduíte devem ser desativados. Isso ajudará a minimizar o possível perigo de choque dos fios de motor cruzados.
Gabinete Procedimento de remoção (Recoloque quando a fiação estiver completa)0, 1, 2 & 6 Parte da tampa dianteira, consulte a página 1-1.
3 Abra a tampa dianteira e gentilmente deslize-a para baixo e para fora.
4 Afrouxe os 4 parafusos e retire-a.
5 Retire a tampa dianteira (consulte a página 1-1), deslize levemente o painel para cima e para fora.

1-8 Instalação/Fiação
Seleção da fase de entrada CA (somente nos gabinetes 5 e 6)
Movimentar o jumper “tipo linha” ilustrado na Figura 1.2 permitirá uma operação mono ou trifásica.
Importante: Ao selecionar uma operação monofásica, a potência de entrada deverá ser aplicada somente aos terminais R (L1) e S (L2).
Seleção/verificação da tensão do ventilador (somente nos gabinetes 5 e 6)
Importante: Leia a declaração de Atenção acima!
Os gabinetes 5 e 6 utilizam um transformador para fazer a correspondência da tensão da linha de entrada e tensão do ventilador interno. Se a tensão de linha for diferente da classe de tensão especificada na placa de identificação do inversor, talvez seja necessário mudar as derivações do transformador conforme indicado abaixo. Os inversors de barramento comum (entrada CC) necessitam de uma alimentação de 120 ou 240V CA fornecida pelo usuário para energizar os ventiladores de resfriamento. A fonte de alimentação é conectada entre “0V CA” e o terminal correspondente à sua tensão de fonte (consulte a Figura 1.4).
Tabela A Classificações VA do ventilador (somente entrada CC)
Figura 1.2 Localizações típicas – Transformador e jumper de seleção de fase (Ilustração do Gabinete 5)
Acesso das derivações do transformador do gabinete 6
O transformador fica localizado atrás do bloco de terminais de potência na área indicada na Figura 1.2. O acesso é obtido soltando-se o bloco de terminais do trilho. Para soltar o bloco de terminais e mudar a derivação:
!ATENÇÃO: Para evitar o perigo de choque, certifique-se de que toda a alimentação no inversor tenha sido removida antes de realizar o que se segue.
Gabinete Classificação (120V ou 240V)5 100 VA
6 138 VA
TIPO LINHA
Trifás
icoMon
ofásic
o
SOBRESSALENTE 1
SOBRESSALENTE 2
Derivação de 690 Volts
Derivação de 600 Volts
Derivação de 480 Volts
Derivação de 400 Volts
Tensão do ventilador
Jumper de seleção de fase
WIRE RANGE: 14-1/0 AWG (2.5-35 MM2)TORQUE: 32 IN-LB (3.6 N-M)STRIP LENGTH: 0.67 IN (17 MM)USE 75 C CU WIRE ONLY
POWER TERMINAL RATINGS
WIRE RANGE: 6-1/0 AWG (16-35 MM2)TORQUE: 44 IN-LB (5 N-M)STRIP LENGTH: 0.83 IN (21 MM)
GROUND TERMINAL RATINGS (PE)
300 VDC EXT PWR SPLY TERM (PS+, PS-)
WIRE RANGE: 22-10 AWG (0.5-4 MM2)TORQUE: 5.3 IN-LB (0.6 N-M)STRIP LENGTH: 0.35 IN (9 MM)
17
21
INPUT ACOUTPUT
Módulo decomunicações
opcional
9

Instalação/Fiação 1-9
1. Localize a pequena lingüeta metálica na parte inferior do bloco da extremidade.
2. Pressione a lingüeta para dentro e puxe a parte superior do bloco para fora. Se desejado, repetir o procedimento para o próximo bloco.
3. Selecione a derivação do transformador apropriada.
4. Recoloque o(s) bloco(s) na ordem inversa.
Bloco de terminais de potênciaConsulte Figura 1.3 quanto às localizações típicas.
Tabela 1.C Especificações do bloco de terminais de potência
No. Nome Gabinete Descrição
Faixa de bitolas dos fios(1) TorqueMáximo Mínimo Máximo Recomendado
➊ Bloco de terminais de potência
0 & 1 Conexões do motor e potência de entrada
4,0 mm2
(10 AWG)0,5 mm2
(22 AWG)1,7 N-m(15 lb.-pol.)
0,8 N-m(7 lb.-pol.)
2 Conexões do motor e potência de entrada
10,0 mm2
(6 AWG)0,8 mm2
(18 AWG)1,7 N-m(15 lb.-pol.)
1,4 N-m(12 lb.-pol.)
3 Conexões do motor e potência de entrada
25,0 mm2
(3 AWG)2,5 mm2
(14 AWG)3,6 N-m(32 lb.-pol.)
1,8 N-m(16 lb.-pol.)
Terminais BR1, 2 10,0 mm2
(6 AWG)0,8 mm2
(18 AWG)1,7 N-m(15 lb.-pol.)
1,4 N-m(12 lb.-pol.)
4 Conexões do motor e potência de entrada
35,0 mm2
(1/0 AWG)10 mm2
(8 AWG)4,0 N-m(35 lb.-pol.)
4,0 N-m(35 lb.-pol.)
5 (75 HP)
Potência de entrada, BR1, 2, CC+, CC– e conexões do motor
50,0 mm2
(1/0 AWG)2,5 mm2
(14 AWG)
Consulte a Nota(2)
PE 50,0 mm2
(1/0 AWG)16,0 mm2
(6 AWG)
5(100 HP)
Potência de entrada, CC+, CC– e motor
70,0 mm2
(2/0 AWG)25,0 mm2
(4 AWG)
Terminais BR1, 2 50,0 mm2
(1/0 AWG)2,5 mm2
(14 AWG)
PE 50,0 mm2
(1/0 AWG)16,0 mm2
(6 AWG)
6 Potência de entrada, CC+, CC–, BR1, 2, PE, conexões do motor
120,0 mm2
(4/0 AWG)2,5 mm2
(14 AWG)6 N-m(52 lb.-pol.)
6 N-m(52 lb.-pol.)
➋ Terminal SHLD 0-6 Ponto de terminação para proteções da fiação
— — 1,6 N-m(14 lb.-pol.)
1,6 N-m(14 lb.-pol.)
➌ Bloco de terminais AUX
0-4 Tensão de Controle AuxiliarPS+, PS–(3)
1,5 mm2
(16 AWG)0,2 mm2
(24 AWG)— —
5-6 4,0 mm2
(12 AWG)0,5 mm2
(22 AWG)0,6 N-m(5,3 lb.-pol.)
0,6 N-m(5,3 lb.-pol.)
➍ Bloco de terminais do ventilador (CB somente)
5-6 Tensão do ventilador fornecida pelo usuário (página 1-8)
4,0 mm2
(12 AWG)0,5 mm2
(22 AWG)0,6 N-m(5,3 lb.-pol.)
0,6 N-m(5,3 lb.-pol.)
(1) Bitolas máxima/mínima que o bloco de terminais aceitará - Isto não é uma recomendação.(2) Consulte a etiqueta do bloco de terminais no interior do inversor.(3) Tensão de controle externo: Instalação UL - 300V CC, ±10%, Instalação não UL - 270-600V CC, ±10%
Gabinete 0-3 - 40 W, 165mA, Gabinete 5 - 80 W, 90mA.

1-10 Instalação/Fiação
Figura 1.3 Localização típica do bloco de terminais de potência
BR1
BR2
DC+
DC–
PE
U/T1
V/T2
W/T3
R/L1
S/L2
T/L3
Use 75C Wire Only
#10-#14 AWG
Torque to 7 in-lbs
! DANGER
BR1 B
SHLD SHLD
V/T2 W/T3 PE R/L1 S/L2 T/L3
AUX IN+ AUX OUT–
Módulo decomunicações
opcional
75C Cu Wire6 AWG [10MM2] Max.
12 IN. LBS.1.4 N-M } TORQUE
WIRESTRIP
CO
NTR
OL
POW
ER
➊
➋ ➊ ➋
WIRE RANGE: 14-1/0 AWG (2.5-35 MM2)TORQUE: 32 IN-LB (3.6 N-M)STRIP LENGTH: 0.67 IN (17 MM)USE 75 C CU WIRE ONLY
POWER TERMINAL RATINGS
WIRE RANGE: 6-1/0 AWG (16-35 MM2)TORQUE: 44 IN-LB (5 N-M)STRIP LENGTH: 0.83 IN (21 MM)
GROUND TERMINAL RATINGS (PE)
300 VDC EXT PWR SPLY TERM (PS+, PS-)
WIRE RANGE: 22-10 AWG (0.5-4 MM2)TORQUE: 5.3 IN-LB (0.6 N-M)STRIP LENGTH: 0.35 IN (9 MM)
17
21
INPUT ACOUTPUT
Módulo decomunicações
opcional
9
BR1 BR2 DC+ DC- U/T1 V/T2 W/T3 R/L1 S/L2 T/L3
Módulo decomunicações
opcional
PE B
PE A
75C Cu Wire3 AWG [25MM2] Max.
16 IN. LBS.1.8 N-M } TORQUE
WIRESTRIP
CO
NTR
OL
POW
ER
AUX IN+ –
SHLD
SHLD
PE
75C Cu Wire6 AWG [10MM2] Max.
BR1 BR2
12 IN. LBS.1.4 N-M } TORQUE
PE/
OptionalCommunications
Module
L2L1T3T2T1 L3INPUTOUTPUT
USE 75°CCOPPER WIRE
ONLYTORQUE52 IN-LB(6 N-M)
BR2
PS
+P
S–
BR1 DC+ DC–USE 75°C COPPER WIRE ONLY, TORQUE 52 IN-LB (6 N-M)
22-10AWG
5.3 IN-LB(0.6 N-M)
WIR
E S
TR
IP
Gabinetes 0 e 1
➌
➌
Gabinete 2
➋
➌
➊
Gabinete 6
➋ Gabinetes 3 e 4
➌
➊
Gabinete 5
➋
➊
➌
➍Somente inversores de barramento comum

Instalação/Fiação 1-11
Figura 1.4 Bloco de terminais de potênciaG
abin
ete
Bloco de terminais
0+1
*Nota:Os terminais BR1 e BR2 que aparecem sombreados estarão presentes somente nos inversores que forem pedidos com a opção de freio.
2
3+4
Entrada de 480V CA Entrada de 650V CC 5 75 HP, regime de serviço normal 75 HP, regime de serviço normal
100 HP, regime de serviço normal 100 HP, regime de serviço normal
6 125-200 HP, regime de serviço normal 125-200 HP, regime de serviço normal
BR1
BR2
DC+
DC–
PE
U (T1)
V (T2)
W (T3)
R (L1)
S (L2)
T (L3)
T(L3)
S(L2)
R(L1)
W(T3)
V(T2)
U(T1)
PEDC–DC+BR2BR1
T(L3)
S(L2)
R(L1)
W(T3)
V(T2)
U(T1)
DC–DC+BR2BR1
T/L3S/L2R/L1PEPEW/T3V/T2U/T1DC–DC+BR1*/DC+BR2*PS–
PS+
240VAC
120VAC
0VACPE PEW/T3V/T2
Fusível do resistor de pré-carga - FWP-15A14F(Somente inversores de barramento comum c/ pré-carga)
U/T1DC–DC+BR1*/DC+BR2*PS–
PS+
T/L3S/L2R/L1PEPE
W/T3V/T2U/T1DC–DC+BR1*/DC+BR2*
PS–
PS+
240VAC
120VAC
0VAC PEPE
W/T3V/T2U/T1DC–DC+BR1*/DC+BR2*
PS–
PS+
Fusível do resistor de pré-carga - FWP-15A14F(Somente inversores de barramento comum c/ pré-carga)
USE 75 CCOPPER WIRE
ONLY
TORQUE52 IN-LB(6 N-M)
UT1
DC–DC+BR1BR2
VT2
WT3
RL1
SL2
INPUTOUTPUT
TL3
PE PE
USE 75 C COPPER WIRE ONLY, TORQUE 52 IN-LB (6 N-M)
22-10AWG
5.3 IN-LB(0.6 N-M)W
IRE
ST
RIP P
S+
PS
–
Capacitor de modo comum e MOV jumpers
Capacitor do filtro de entrada
Parafuso M8 (todos os terminais)Largura máx. terminal = 25,4 mm (1 pol.)
DC–DC+BR1BR2USE 75 C COPPER WIRE ONLY, TORQUE 52 IN-LB (6 N-M)
22-10AWG
5.3 IN-LB(0.6 N-M)W
IRE
ST
RIP P
S+
PS
–
UT1
VT2
WT3
PE PE
USE 75 CCOPPER WIRE
ONLY
TORQUE52 IN-LB(6 N-M) OUTPUT
22-10 AWG5.3 IN-LB(0.6 N-M)
FA
NIN
PU
T1-
PH
AS
E
0 V
AC
120
VA
C24
0 V
AC
Fusível-resistor de pré-cargaFWP-15A14F(Somente inversores de barramento comum c/ pré-carga)
Parafuso M8 (todos os terminais)Largura máx. terminal = 25,4 mm (1 pol.)

1-12 Instalação/Fiação
Precauções com o contator de entrada
Precaução com o contator de saída
Terminal Descrição NotasBR1 Freio CC (+) Conexão do resistor FD - Importante: Somente um resistor de
frenagem dinâmica pode ser usado com os gabinetes 0-3. A conexão de um resistor interno e externo poderia causar danos.BR2 Freio CC (–)
DC+ Barramento CC (+)
DC– Barramento CC (-)
PE Aterramento PE Consulte a Figura 1.3 quanto à localização nos inversores com gabinete 3
Aterramento do motor Consulte a Figura 1.3 quanto à localização nos inversores com gabinete 3
U U (T1) Para o motor
V V (T2) Para o motor
W W (T3) Para o motor
R R (L1) Tensão de alimentação de entrada da linha CATrifásica = R, S e TMonofásica = somente R e S
S S (L2)
T T (L3)
PS+ AUX (+) Tensão de controle auxiliar (consulte a Tabela 1.C)
PS– AUX (–) Tensão de controle auxiliar (consulte a Tabela 1.C)
Utilização de contatores de entrada/saída
!ATENÇÃO: Um contator ou outro dispositivo que freqüentemente desconecta e realimenta a linha CA ao inversor para dar partida e parar o motor poderá causar danos no hardware do inversor. O inversor é projetado para usar os sinais de entrada de controle que darão partida e pararão o motor. Se for usado um dispositivo de entrada, a operação não deverá exceder um ciclo por minuto, caso contrário ocorrerão danos no inversor.
!ATENÇÃO: O circuito de controle de partida/parada/ativação do inversor inclui componentes de estado sólido. Se houver perigos decorrentes do contato acidental com máquinas em movimento ou fluxo indesejado de líquidos, gases ou sólidos, um circuito de parada adicional conectado com fio poderá ser necessário para remover a linha CA do inversor. Um método de frenagem auxiliar poderá ser necessário.
!ATENÇÃO: Para proteger o inversor contra danos ao usar contatores de saída, devem-se ler e compreender as informações a seguir: um ou mais contatores de saída podem ser instalados entre o inversor e o(s) motor(es) para fins de desconectar ou isolar determinados motores/cargas. Se o contator estiver aberto enquanto o inversor está operando, a tensão será removida do respectivo motor, porém o inversor continuará produzindo tensão nos terminais de saída. Além disso, reconectar o motor para um inversor ativo (fechando o contator) poderia produzir corrente excessiva e causar falha no inversor. Se uma dessas condições for determinada indesejável ou insegura, um contato auxiliar no contator de saída deverá ser conectado à entrada digital do inversor que é programada como “Ativar.” Isso fará com que o inversor reduza de velocidade até parar (cessar a saída) sempre que um contator de saída for aberto.

Instalação/Fiação 1-13
Precaução com o contator de bypass
Os inversores PowerFlex 700 possuem MOVs de proteção e capacitores de modo comum recomendados para o aterramento. Para proteção contra danos no inversor esses dispositivos devem ser desconectados se o inversor estiver instalado em um sistema de distribuição não aterrado onde as tensões linha-terra em qualquer fase possam exceder 125% da tensão linha-linha nominal. Para desconectar esses dispositivos, remova o(s) jumper(s) relacionado(s) na Tabela 1.D. Os jumpers podem ser removidos puxando-os diretamente para fora. Consulte as Wiring and Grounding Guidelines for PWM AC Drives, publicação DRIVES-IN001 para obter maiores informações sobre sistemas não aterrados.
Tabela 1.D Remoção de jumpers (1)
(1) Importante: Não retire os jumpers se o sistema de distribuição estiver aterrado.
!ATENÇÃO: Um sistema de bypass indevidamente utilizado ou instalado pode causar danos nos componentes ou a redução da vida útil do produto. As causas mais comuns são:• fiação da linha CA aos terminais de controle ou saída do inversor.• bypass indevido ou circuitos de saída não aprovados pela Allen-Bradley.• circuitos de saída que não conectam diretamente ao motor.Entre em contato com a Allen-Bradley para receber auxílio com a aplicação ou fiação.
Desconexão de MOVs e Capacitores de Modo Comum
!ATENÇÃO: Para evitar o perigo de choque elétrico, verifique se a tensão nos capacitores de barramento foi descarregada antes de remover/instalar os jumpers. Meça a tensão no barramento CC nos terminais +CC e –CC do bloco de terminais de potência. A tensão deve ser zero.
Gabinetes Jumper Componente Localização do Jumper No.0, 1 PEA Capacitores de modo comum Retire a gaveta de E/S (página 1-16). Jumpers localizados no
quadro de potência (Figura 1.5). ➊PEB MOVs ➋
2-4 PEA Capacitores de modo comum Os jumpers estão localizados acima do bloco de terminais de potência (veja a Figura 1.5 ). ➌
PEB MOVs ➍5 Fio Capacitores de modo comum Retire a gaveta de E/S conforme descrito na página 1-16. O
jumper verde/amarelo fica localizado na parte posterior do chassi (para a localização, consulte a Figura 1.5). Desconecte, isole e prenda o fio para proteger contra o contato indesejado com o chassi ou componentes.
➎
MOVs Observe a localização dos dois fios verde/amarelo do jumper próximos ao bloco de terminais de potência (Figura 1.5). Desconecte, isole e prenda os fios para proteger contra o contato indesejado com o chassi ou componentes.
➏Capacitores do filtro de entrada
6 Fio Capacitores de modo comum Retire a proteção de fios do bloco de terminais de potência. Desconecte os três fios verde/amarelo dos dois terminais “PE” indicados na Figura 1.4. Isole/prenda os fios para proteger contra o contato indesejado com o chassi ou componentes.
MOVsCapacitores do filtro de entrada

1-14 Instalação/Fiação
Figura 1.5 Localizações típicas dos jumper (consulte a descrição na Tabela 1.D)
BR1 BR2 DC+ DC- U/T1 V/T2 W/T3
SHLD SHLD
PE R/L1 S/L2 T/L3
PE 2
MOV-PE JMPR
PE 1
AUX IN+ AUX OUT–
75C Cu Wire6 AWG [10MM2] Max.
12 IN. LBS.1.4 N-M } TORQUE
WIRESTRIP
CO
NTR
OL
POW
ER
PE 4 PE 3
DC FILTER CAP-PE JMPR
BR1
BR2
DC+
DC–
PE
U/T1
V/T2
W/T3
R/L1
S/L2
T/L3
Use 75C Wire Only
#10-#14 AWG
Torque to 7 in-lbs
!DANGER
BR1 BR2 DC+ DC- U/T1 V/T2 W/T3 R/L1 S/L2 T/L3
PE B
PE A
75C Cu Wire3 AWG [25MM2] Max.
16 IN. LBS.1.8 N-M } TORQUE
WIRESTRIP
CO
NTR
OL
POW
ER
AUX IN+ –
SHLD
SHLD
PE
75C Cu Wire6 AWG [10MM2] Max.
BR1 BR2
12 IN. LBS.1.4 N-M } TORQUE
Gabinetes 0 e 1(Gaveta de E/S removida)
Gabinete 2
➋
➌ ➍
➊
➏
➎
WIRE RANGE: 14-1/0 AWG (2.5-35 MM2)TORQUE: 32 IN-LB (3.6 N-M)STRIP LENGTH: 0.67 IN (17 MM)USE 75 C CU WIRE ONLY
POWER TERMINAL RATINGS
WIRE RANGE: 6-1/0 AWG (16-35 MM2)TORQUE: 44 IN-LB (5 N-M)STRIP LENGTH: 0.83 IN (21 MM)
GROUND TERMINAL RATINGS (PE)
300 VDC EXT PWR SPLY TERM (PS+, PS-)
WIRE RANGE: 22-10 AWG (0.5-4 MM2)TORQUE: 5.3 IN-LB (0.6 N-M)STRIP LENGTH: 0.35 IN (9 MM)
17
21
INPUT ACOUTPUT
Módulo decomunicações
opcional
9
Gabinete 5
➌ ➍
Gabinetes 3 e 4
Importante: Não descarte nem substitua as peças de aterramento.

Instalação/Fiação 1-15
Pontos importantes a serem lembrados sobre a fiação de E/S:
• Use somente fios de cobre. Os requisitos de bitola de fios e as recomendações se baseiam na temperatura de 75 graus Celsius. Não reduza a bitola do fio ao usar fios resistentes a temperaturas mais elevadas.
• Recomenda-se usar fios com classificação de isolamento de 600V ou superior.
• Os fios de controle e sinais devem ficar afastados no mínimo 0,3 metro (1 pé) dos fios de potência.
Importante: Os terminais de E/S rotulados “(-)” ou “Comum” não são recomendados para a tomada de terra e são projetados para reduzir enormemente a interferência de modo comum. O aterramento desses terminais poderá causar ruído de sinal.
Tipos de fios de controle e sinal
Tabela 1.E Fio de sinal recomendado
Fiação de E/S
!ATENÇÃO: A configuração de uma entrada analógica para operação de 0-20mA e seu acionamento de uma fonte de tensão poderia causar danos nos componentes. Verifique a configuração apropriada antes de aplicar os sinais de entrada.
!ATENÇÃO: Há riscos de lesões pessoais ou danos no equipamento quando forem utilizadas fontes de entrada bipolar. Ruído e desvio em circuitos de entrada sensíveis podem causar mudanças imprevistas na velocidade e direção de operação do motor. Use os parâmetros de comando de velocidade para ajudar a reduzir a sensibilidade da fonte de entrada.
Tipo de sinal/Onde é utilizado
Tipo(s) de fio(s) Belden(ou equivalente) Descrição
Classificação mínima de isolamento
E/S analógica e PTC 8760/9460 0,750 mm2(18AWG), par torcido, blindagem de 100% com dreno(5)
300V, 75-90 °C(167-194 °F)Potenciômetro remoto 8770 0,750 mm2(18AWG), 3 condutores, blindados
E/S pulso/encoder<30 m (100 pés)
Combinado: 9730(1) 0,196 mm2(24AWG), individualmente blindados
E/S pulso/encoder30 a 152 m (100 a 500 pés)
Sinal: 9730/9728(1) 0,196 mm2(24AWG), individualmente blindados
Potência 8790(2) 0,750 mm2(18AWG)
Combinado: 9892(3) 0,330 mm2 ou 0,500 mm2 (3)
E/S pulso/encoder152 a 259 m (500 a 850 pés)
Sinal: 9730/9728(1) 0,196 mm2(24AWG), individualmente blindados
Potência 8790(2) 0,750 mm2(18AWG)
Combinado: 9773/9774(4) 0,750 mm2(18AWG), par individualmente blindado
(1) 9730 é composto por três pares individualmente blindados (2 pares de canal + 1 de potência). Caso sejam necessários 3 pares de canal, use o 9728.
(2) 8790 é composto por um par blindado. (3) 9892 é composto por 3 pares individualmente blindados (3 pares de canal), 0,33 mm2 (22 AWG) + 1 par blindado de 0,5 mm2
(20 AWG) para potência. (4) 9773 é composto por três pares individualmente blindados (2 pares de canal + 1 par de potência). Caso sejam necessários 3 pares
de canal, use o 9774.(5) Se os fios forem curtos e estiverem contidos em um gabinete sem circuitos sensíveis, o uso de fio blindado talvez não seja
necessário, mas é sempre recomendado.

1-16 Instalação/Fiação
Tabela 1.F Fio de controle recomendado para a E/S digital
A gaveta de controle de E/SA Figura 1.6 mostra as localizações da gaveta de controle de E/S e dos blocos de terminais. A gaveta fornece um ponto de montagem para diversas opções de E/S do PowerFlex 700. Siga as etapas abaixo para retirar a gaveta do inversor. O procedimento de remoção da gaveta é similar para todos os gabinetes (O inversor com Gabinete 0 está ilustrado).
Figura 1.6 Gaveta típica do PowerFlex 700 e blocos de terminais de E/S
Blocos de terminais de E/S
Tabela 1.G Especificações do bloco de terminais de E/S
Tipo Tipo(s) de fio(s) DescriçãoClassificação mínima de isolamento
Sem blindagem
De acordo com o Código Nacional de Eletricidade (NEC) dos EUA ou códigos nacionais ou locais aplicáveis
– 300V, 60 °C (140 °F)
Blindado Cabo blindado multicondutor como o Belden 8770(ou equiv.)
0,750 mm2(18AWG), 3 condutores, blindados.
Etapa DescriçãoDesconecte os dois conectores de cabo indicados naFigura 1.6.
Afrouxe os dois engates de parafuso indicados naFigura 1.6.
Deslize a gaveta para fora.
Retire os parafusos que prendem a gaveta para obter acesso às placas.
AB
CD
BR1BR2DC+DC-PEU/T1V/T2W/T3R/L1 L2
➌➋
➊
B
A
C
B
D
Pino 1
Detalhe
No. Nome DescriçãoFaixa de bitolas dos fios(2) TorqueMáximo Mínimo Máximo Recomendado
➊ Gaveta de E/S Gaveta de E/S removível
➋ Bloco de terminais de E/S
Conexões de sinal e controle 2,1 mm2
(14 AWG)0,30 mm2
(22 AWG)0,6 N-m(5,2 lb.-pol.)
0,6 N-m(5,2 lb.-pol.)
➌ Bloco de terminais do encoder(1)
Conexões de sinal e potência do encoder
0,75 mm2
(18 AWG)0,196 mm2
(24 AWG)0,6 N-m(5,2 lb.-pol.)
0,6 N-m(5,2 lb.-pol.)
(1) Não se encontra disponível com a opção de controle padrão.(2) Máximo/mínimo que o bloco de terminais aceitará - Isto não é uma recomendação.

Instalação/Fiação 1-17
Figura 1.7 Designações dos terminais de E/S com a opção com controle padrão
Opção com controle padrão No. Sinal Pa
drão
de
fábr
ica
Descrição Parâ
met
ros
rela
cion
ados
1 Ent tensão anlg 1 (–) (2) Impedância de entrada de 88.000 ohms, 11 bits e sinal, ±10V, bipolar, diferencial, isolada(3).
320 -327
2 Ent tensão anlg 1 (+)
3 Ent tensão anlg 2 (–) (2) Impedância de entrada de 88.000 ohms, 11 bits e sinal, ±10V, bipolar, diferencial, isolada (4). 4 Ent tensão anlg 2 (+)
5 Potenciômetro comum – Para referências de potenciômetro de (+) e (–) 10V.
6 Saída tensão anlg 1 (–) (2) Carga mínima de 2.000 ohms, 11 bits e sinal, ±10V, bipolar.
340 -3447 Saída tensão anlg 1 (+)
8 Saída corrente anlg 1 (–) (2) Carga máxima de 400 ohms, 11 bits e sinal, 4-20mA.9 Saída corrente anlg 1 (+)
10 Reservado para uso futuro
11 Saída digital 1 - N.C.(1) Falha Carga resistiva máxima:240V CA/30V CC – 1200VA, 150WCorrente máxima: 5A, carga mín: 10mACarga indutiva máxima:240V CA/30V CC – 840VA, 105WCorrente máxima: 3,5A, carga mín: 10mA
380 -38712 Saída digital comum 1
13 Saída digital 1 - N.O.(1) NÃO falha
14 Saída digital 2 - N.C.(1) NÃO operar
15 Saída digital comum 2
16 Saída digital 2 - N.O.(1) Operar
17 Ent corrente anlg 1 (–) (2) Impedância de entrada de 124 ohms, 11 bits e sinal, 4-20mA, isolada (3).
320 -32718 Ent corrente anlg 1 (+)
19 Ent corrente anlg 2 (–) (2) Impedância de entrada de 124 ohms, 11 bits e sinal, 4-20mA, isolada (4).20 Ent corrente anlg 2 (+)
21 Referência de potenciômetro de –10V
– Mínimo de 2000 ohms.
22 Referência de Pot. de +10V –
23 Reservado para uso futuro
24 +24V CC(5) – Tensão para entrada lógica suprida pelo inversor (5).
25 Ent digital comum –
26 24V comum(5) – Comum para alimentação de energia interna.
27 Ent digital 1 Parada - CF 115V CA, 50/60 Hz – Isolamento ópticoEstado baixo: menor que 30V CAEstado elevado: maior que 100V CA24V CA/CC, 50/60 Hz – Isolamento ópticoEstado baixo: menor que 5V CA/CCEstado elevado: maior que 20V CA/CC11,2mA CC
361 -36628 Ent digital 2 Partida
29 Ent digital 3 Auto/Manual
30 Ent digital 4 Sel veloc 1
31 Ent digital 5 Sel veloc 2
32 Ent digital 6 Sel veloc 3
(1) Contatos no estado não energizado. Todo relé programado como uma falha ou alarme será energizado (iniciará a operação) quando for aplicada tensão no inversor e será desligado (desativado) quando houver uma falha ou alarme. Os relés selecionados para outras funções serão energizados apenas quando tal condição estiver presente e desligarão quando a condição for removida.
(2) Essas entradas/saídas dependem de vários parâmetros. Consulte os “Parâmetros Relacionados”.(3) Isolamento diferencial - fonte externa deve ser mantida abaixo de 160V com relação ao PE. Entrada fornece imunidade de modo
comum elevada.(4) Isolamento diferencial - fonte externa deve ser mantida abaixo de 10V com relação ao PE. (5) Carga máxima de 150mA. Não está presente nas versões de 115V.
1
1632

1-18 Instalação/Fiação
Figura 1.8 Designações dos terminaos de E/S com opção com controle vetorial
Opção com controle vetorial No. Sinal Pa
drão
de
fábr
ica
Descrição Parâ
met
ros
rela
cion
ados
1 Ent. analóg. 1 (–) (1) (2) Impedância de entrada de 88,000 ohms, 11 bits e sinal, ±10V/4-20mA, bipolar, diferencial, isolada(3). Para operação de 4-20mA, deve ser instalado um jumper nos terminais 17 e 18 (ou 19 e 20).
320 -3272 Ent. analóg. 1 (+) (1)
3 Ent. analóg. 2 (–) (1)
4 Ent. analóg. 2 (+) (1)
5 Potenciômetro comum – Para referências de potenciômetro de (+) e (–) 10V.
6 Saída analógica 1 (–) (2) Modo de tensão, 11 bits e sinal, ±10V/4-20mA, bipolar (a saída de corrente não é bipolar), limita a corrente em 5mA. Modo de corrente – a resistência de carga máxima é 400 ohms.
340 -3477 Saída analógica 1 (+)
8 Saída analógica 2 (–)
9 Saída analógica 2 (+)
10 Reservado para uso futuro
11 Saída digital 1 - N.C. (4) Falha Carga resistiva máxima:240V CA/30V CC – 1200VA, 150WCorrente máxima: 5A, carga mín: 10mACarga indutiva máxima:240V CA/30V CC – 840VA, 105WCorrente máxima: 3,5A, carga mín: 10mA
380 -39112 Saída digital comum 1
13 Saída digital 1 - N.O.(4) NÃO falha
14 Saída digital 2 - N.C. (4) NÃO operar
15 Com. de saída digital 2/3
16 Saída digital 3 - N.O.(4) Operar
17 Jumper de entrada de corrente(1) – Ent. analóg. 1
A colocação de um jumper entre os terminais 17 e 18 (ou 19 e 20) configurará esta entrada analógica para a corrente.18
19 Jumper de entrada de corrente(1) – Ent. analóg. 220
21 Referência de potenciômetro de –10V
– Carga mínima de 2000 ohms.
22 Referência de Pot. de +10V –
23 Reservado para uso futuro
24 +24VCC(5) – Tensão para entrada lógica suprida pelo inversor (5).
25 Ent digital comum –
26 24V comum(5) – Comum para alimentação de energia interna.
27 Ent digital 1 Parada - CF 115V CA, 50/60 Hz – Isolamento ópticoEstado baixo: menor que 30V CAEstado elevado: maior que 100V CA24V CC – Isolamento ópticoEstado baixo: menor que 5V CCEstado elevado: maior que 20V CC11,2mA CC
361 -36628 Ent digital 2 Partida
29 Ent digital 3 Auto/Manual
30 Ent digital 4 Sel veloc 1
31 Ent digital 5 Sel veloc 2
32 Ent digital 6/Ativação de hardware, ver a pág. 1-19
Sel veloc 3
(1) Importante: A operação de 4-20mA requer um jumper nos terminais 17 e 18 (ou 19 e 20). Poderão ocorrer danos no inversor se o jumper não for instalado.
(2) Essas entradas/saídas dependem de vários parâmetros (consulte “Parâmetros relacionados”).(3) Isolamento diferencial - fonte externa deve ser mantida abaixo de 160V com relação ao PE. Entrada fornece imunidade de modo
comum elevada.(4) Contatos no estado não energizado. Todo relé programado como uma falha ou alarme será energizado (iniciará a operação)
quando for aplicada tensão no inversor e será desligado (desativado) quando houver uma falha ou alarme. Os relés selecionados para outras funções serão energizados apenas quando tal condição estiver presente e desligarão quando a condição for removida.
(5) Carga máxima de 150mA. Não está presente nas versões de 115V.
1
1632

Instalação/Fiação 1-19
Bloco de terminais do encoder (somente na opção com controle vetorial)
Tabela 1.H Designações dos terminais do encoder
Figura 1.9 Exemplo de fiação do encoder
Circuitos de ativação do hardware (somente na opção com controle vetorial)Por default, o usuário pode programar uma entrada digital como uma entrada de ativação. O status desta entrada é interpretado pelo software do inversor. Se o aplicativo exigir que o inversor seja desativado sem interpretação do software, pode-se utilizar uma configuração “dedicada” de ativação do hardware. Isto é feito removendo-se um jumper e instalando os fios de entrada de ativação para a “Ent digital 6” (veja abaixo).
1. Retire a gaveta de controle de E/S e a tampa conforme descrito na página 1-16.
2. Localize e retire o Jumper J10 da placa de controle principal (veja o diagrama).
3. Recoloque a gaveta.
4. Faça a fiação de ativação para a “Ent digital 6” (consulte a Figura 1.8).
5. Verifique se o parâmetro 366, [Sel Entr Digit 6], está configurado em “1, Ativar”.
No. Descrição (consulte a página A-3 quanto às especificações do encoder)Consulte “Detalhe” na Figura 1.6
8 Tensão de +12V (1) CC
(1) Jumper selecionável de +5/12V se encontra disponível apenas nas placas do encoder 20B-ENC-2.
Fonte de alimentação interna250mA. 7 Retorno de +12V (1) CC (Comum)
6 Encoder Z (NÃO) Entrada de pulso, marcador ou registro. (2)
(2) O canal Z pode ser usado como uma entrada de pulso enquanto A e B são usados para o encoder.
5 Encoder Z
4 Encoder B (NÃO) Entrada em quadratura B.
3 Encoder B
2 Encoder A (NÃO) Entrada de canal simples ou em quadratura A.1 Encoder A
8
1
E/S Exemplo de conexão E/S Exemplo de conexão Tensão do encoder – Tensão interna do inversorInterna (inversor) 12 V CC, 250mA
Tensão do encoder – Alimentação de tensão externa
Sinal do encoder – canal duplo, extremidade simples
Sinal do encoder – canal duplo, diferencial
Comum
+12V CC(250mA)
1
2
3
4
5
6
7
8
para SHLD
+ Com
um
Alimentação de tensão externa
paraSHLD
B
NÃO B
NÃO A
A
Z
NÃO Z
ParaSHLD
para a fontede alimentação
Comum
1
2
3
4
5
6
7
8para SHLD
1
2
3
4
5
6
7
8
B
Z
NÃO A
NÃO B
NÃO Z
A
ENABLE
JUM
PER J10

1-20 Instalação/Fiação
Exemplos de fiação de E/S – Opções de controle padrão e vetorial
Entrada/Saída Exemplo de conexão Alterações de parâmetros necessáriasReferência de velocidade unipolar do potenciômetro (1) Pot. de 10.000 ohms. Recomendado(mínimo de 2.000 ohms)
• Ajustar graduação:Parâmetros 91/92 e 325/326
• Visualizar resultados:Parâmetro 002
Referência de velocidade bipolar do joystick (1)
Entrada de +/- 10V
• Configurar modo de direção:Parâmetro 190 = “1, Bipolar”
• Ajustar graduação:Parâmetros 91/92 e 325/326
• Visualizar resultados:Parâmetro 002
Referência de velocidade bipolar de entrada analógicaEntrada de +/- 10V
• Configurar modo de direção:Parâmetro 190 = “1, Bipolar”
• Ajustar graduação:Parâmetros 91/92 e 325/326
• Visualizar resultados:Parâmetro 002
Referência de velocidade unipolar Entrada de tensão analógicaEntrada de 0 a +10V
• Configurar entrada com o parâmetro 320• Ajustar graduação:
Parâmetros 91/92 e 325/326• Visualizar resultados:
Parâmetro 002
Referência de velocidade unipolar Entrada da corrente analógica
Entrada de 4-20mA
• Configurar entrada para corrente:Parâmetro 320, Bit 1 = “1, Corrente”
• Ajustar graduação:Parâmetros 91/92 e 325/326
• Visualizar resultados:Parâmetro 002
Referência de velocidade unipolar Entrada da corrente analógica
Entrada de 4-20mA
• Configurar entrada para corrente:Parâmetro 320 e adicionar jumper nos terminais apropriados
• Ajustar graduação:Parâmetros 91/92 e 325/326
• Visualizar resultados:Parâmetro 002
Entrada analógica, PTC
PTC OT ajustado > 5VPTC OT removido < 4VPTC curto < 0,2V
• Ajustar alarme 1 do inversor:Parâmetro 211, bit 11 = “Verdadeiro”
• Ajustar Config Falha 1:Parâmetro 238, bit 7 = “Ativado”
• Ajustar Config Alarme 1:Parâmetro 259, bit 11 = “Ativado”
(1) Consulte a declaração de atenção na página 1-15 para obter informações importantes da fiação bipolar.
345
22
3
5 2122
34
Comum
+
34
Comum
+
Standard 1920
Comum
+
Vector 34
1920
Comum
+
Vector
5
3.32kOhm
1.8kPTC
Glóbulo de ferrita
12
22

Instalação/Fiação 1-21
Exemplos de fiação de E/S (continuação)
Entrada/Saída Exemplo de conexão Alterações de parâmetros necessáriasSaída analógica±10V, 4-20mA Bipolar+10V Unipolar (indicada)Controle padrão 4-20mA Unipolar(usar term. 8 & 9)
• Configurar com o parâmetro 340• Selecionar valor da fonte:
Parâmetro 380, [Sel Saida Dig 1]• Ajustar graduação:
Parâmetros 343/344
Controle de 2 fios Não-reversível (1) Fonte de alimentação interna de 24V CC
• Desativar entrada digital No. 1: Parâmetro 361 = “0, Não usado”
• Configurar entrada digital No. 2 :Parâmetro 362 = “7, Operar”
• Configurar modo de direção: Parâmetro 190 = “0, Unipolar”
Controle de 2 fiosReversível (1)
Alimentação externa(depende da placa de E/S)
• Configurar entrada digital No. 1: Parâmetro 361 = “8, Operação para frente”
• Configurar entrada digital No. 2: Parâmetro 362 = “9, Operação reversa”
Controle de 3 fiosAlimentação interna
• Nenhum alteração é necessária
Controle de 3 fiosAlimentação externa(depende da placa de E/S). Requer apenas funções de 3 fios ([Sel Ent Digit 1]). A utilização de seleções de 2 fios causará um alarme tipo 2 (página 4-10).
• Nenhum alteração é necessária
Saída digitalRelés indicados no estado energizado com falha do inversor. Consulte as páginas 1-18 e 1-17.Controle padrão 1 relé nos terminais 14-16.Controle vetorial2 relés nos terminais 14-16.
• Selecionar a fonte para ativar:Parâmetros 380/384
Entrada de ativação • Controle padrão Configurar com o parâmetro 366
• Controle vetorialConfigurar com o parâmetro 366Para ativar o hardware dedicado:Remover o Jumper J10 (consulte a 1-19)
(1) Importante: A programação de entradas para controle de 2 fios desativa todos os botões de partida da HIM.
67
+ –
242526
28
Parada - Operação
25
27
28
Operação reversa
Operaçãopara frente
115V/+24V
Neutro/Comum
Partida
2425262728
Parada
Partida
25
2728
Parada
115V/+24V
Neutro/Comum
Fonte de Alimentação
111213141516
FalhaNÃO falha
NÃO operarOperar
ou
32

1-22 Instalação/Fiação
Fontes de velocidade “Auto” (Automáticas) O comando de velocidade do inversor pode ser obtido de várias fontes diferentes. A fonte é determinada pela programação do inversor e pela condição das entradas digitais de seleção de velocidade, entradas digitais Auto/Manual ou bits de seleção de referência de uma palavra comando.
A fonte de default para uma referência de comando (todas entradas de seleção de velocidades abertas ou não programadas) é a seleção programada em [Sel Ref Veloc A]. Se qualquer uma das entradas de seleção de velocidade estiver fechada, o inversor usará outros parâmetros como fonte de comando da velocidade.
Fontes de velocidade “Manuais”A fonte manual para comando de velocidade para o inversor é a HIM solicitando controle manual (consulte as Funções ALT na página B-2) ou o bloco de terminais de controle (entrada analógica) se uma entrada digital estiver programada em “Auto/Manual”
Como mudar as fontes de velocidadeA seleção da referência de velocidade ativa pode ser feita através das entradas digitais, comando de DPI, botão de jog ou operação Auto/Manual da HIM.
Figura 1.10 Quadro de seleção da referência de velocidade(1)
Fonte de referência de torque (somente na opção com controle vetorial)A fonte de referência de torque é normalmente suprida por uma referência de rede ou entrada analógica. Não é possível fazer a comutação entre as fontes disponíves durante a operação do inversor. As entradas digitais programadas como “Sel Veloc. 1,2,3” e a função Auto/Manual da HIM (veja acima) não afetam a referência de torque ativa quando o inversor está no modo de controle vetorial.
Controle de referência
(1) Para acessar a Velocidade Pré-Programada 1, configure o parâmetro 090 ou 093 em “Velocidade Pré-Programada 1”.
= Default
Sel Ref Veloc B, Parâmetro 093
Veloc Pré-Progr 2, Parâmetro 102
Veloc Pré-Progr 3, Parâmetro 103
Veloc Pré-Progr 4, Parâmetro 104
Veloc Pré-Progr 5, Parâmetro 105
Veloc Pré-Progr 6, Parâmetro 106
Veloc Pré-Progr 7, Parâmetro 107
Sel Ref Man BT, Parâmetro 096 Entrada Digital
Ref Porta DPI 1-6, Consulte Parâmetro 209 Comando de DPI
Veloc. de Jog, Parâmetro 100 Comando de Jog
HIM Solicitando Auto/Manual
Ajuste
[Sel Ent Digitalx]: Sel Veloc. 3 2 1
0 0 1
0 1 10 1 0
1 0 01 0 11 1 01 1 1
Auto
Man
Result Ref Invers
Freqüência Comandada
Velocidade Mín/Máx
Rampa de Acel/Desacel
e Curva S
Referência Pura
Pós-Rampa
para o inversor seguidor para a Referência de Freqüência
para o inversor seguidor para a Referência de Freqüência
Opções de Ref de Veloc Auto
Opções de Ref de Veloc Manual
Compensação de escorregamento 1 "Compensação de Escorregamento"
Nenhum 0 "Loop Aberto"
Saída de PI 2 "Processo PI"Adicionadores de Velocidade [Modo Velocidade]:
Modo Exclusivo de PI[Config PI]Bit 0, Modo Exclusivo = 0
Freqüência Saída
Funções Mód (Inibição, Fixação,
Direção, etc.)
Sel Ref Veloc A, Parâmetro 090 0 0 0

Instalação/Fiação 1-23
PLC = Auto, HIM = ManualUm processo é executado pelo PLC quando estiver no modo Auto e exige controle manual da HIM durante a configuração. A referência de velocidade Auto é emitida pelo PLC através do módulo de comunicações instalado no inversor. Como as comunicações internas são designadas como Porta 5, a [Sel Ref Veloc A] é configurada em “Porta DPI 5” com o inversor operando a partir da fonte Auto.
Obtenção do controle Manual
• Pressione ALT e em seguida Auto/Man na HIM.Quando a HIM adquire o controle manual, o comando da velocidade do inversor provém das teclas de controle de velocidade da HIM ou do potenciômetro analógico.
Liberação para o controle Auto
• Pressione ALT e em seguida Auto/Man na HIM novamente.Quando a HIM libera o controle manual, o comando de velocidade do inversor retorna ao PLC.
PLC = Auto, Bloco de terminais = ManualUm processo é executado pelo PLC quando no modo Auto e exige o controle manual de um potenciômetro analógico conectado ao bloco de terminais do inversor. A referência de velocidade automática é emitida pelo PLC através do módulo de comunicações instalado no inversor. Como as comunicações internas são designadas como Porta 5, a [Sel Ref Veloc A] é configurada em “Porta DPI 5” com o inversor operando a partir da fonte Auto. Como a referência de velocidade Manual é emitida por uma entrada analógica (“Entrada Analógica 1 ou 2”), a [Sel Ref Man BT] é configurada para a mesma entrada. Para alternar entre Auto e Manual, a [Sel Entr Digit 4] é configurada em “Auto/Manual”.
Obtenção do Controle Manual
• Feche a entrada digital.Com a entrada fechada, o comando de velocidade provém do potenciômetro.
Liberação para o Controle Auto
• Abra a entrada digital.Com a entrada aberta, o comando de velocidade retorna ao PLC.
Notas sobre Auto/Manual1. O controle manual é exclusivo. Se a HIM ou bloco de terminais assumir o
controle manual, nenhum outro dispositivo poderá assumir o controle manual até que o dispositivo de controle libere o mesmo.
2. Se a HIM possuir o controle manual e a tensão for removida do inversor, o inversor retornará ao modo Auto quando for restabelecida a tensão.
Exemplos de Auto/Manual

1-24 Instalação/Fiação
Consulte a página C-2 para obter maiores detalhes sobre a prova de torque/elevação.
As notas a seguir devem ser lidas e compreendidas. Consulte também as páginas 1-8 a 1-11 para obter informações adicionais sobre o barramento comum.
Notas importantes do aplicativo
1. Caso sejam utilizados inversores sem pré-carga interna (Somente com os Gabinetes 5 e 6), então:
a) o sistema deve fornecer capacidade de pré-carga para a proteção contra possíveis danos e
b) Não devem ser usadas chaves seccionadoras entre a entrada do inversor e um barramento CC comum sem que seja usado um dispositivo de pré-carga externo.
2. Se os inversore com pré-carga interna (Gabinetes 0-6) forem usados com uma chave seccionadora ao barramento comum, então:
a) um contato auxiliar na desconexão deve ser conectado a uma entrada digital do inversor. A entrada correspondente (parâmetro 361-366) deve ser configurada na opção 30, “Ativar pré-carga”. Isso oferece um interbloqueio de pré-carga adequado, protegendo contra possíveis danos no inversor quando estiver conectado a um barramento CC comum.
b) o inversor deverá possuir a versão de firmware 2.002 or superior (controle padrão e vetorial).
Prova de torque/elevação
Notas sobre pré-carga/barramento comum

Instalação/Fiação 1-25
Atendimento à norma CEO atendimento à Diretriz de Baixa Tensão (Low Voltage - LV) e à Diretriz de Compatibilidade Eletromagnética (Electromagnetic Compatibility - EMC) foi demonstrado utilizando os padrões harmonizados da Norma Européia (EN) publicados no Jornal Oficial das Comunidades Européias. Os inversores PowerFlex(1) cumprem os padrões da Norma Européia relacionados abaixo, quando instalados de acordo com o Manual do Usuário e de Referência.
As declarações de conformidade da CE estão disponíveis online no endereço: http://www.ab.com/certification/ce/docs.
Diretriz de baixa tensão (73/23/EEC)
• EN50178 Equipamento eletrônico para uso em instalações elétricas.
Diretriz EMC (89/336/EEC)
• EN61800-3 Sistemas de inversores elétricos com velocidade ajustável Parte 3: Padrão de produtos EMC incluindo métodos específicos de teste.
Notas gerais
• Se a etiqueta adesiva for removida da parte superior do inversor, o inversor deve ser instalado em um gabinete com aberturas laterais inferiores a 12,5 mm (0,5 pol.) e aberturas superiores inferiores a 1,0 mm (0,04 pol.) para atender a Diretriz de baixa tensão.
• O cabo do motor deve ser mantido o mais curto possível para evitar a emissão eletromagnética e correntes capacitivas.
• Não se recomenda o uso de filtros de linha em sistemas não aterrados.
• Os inversores PowerFlex podem causar interferência de radiofreqüência quando usados em ambientes residenciais. O instalador deve tomar precauções para evitar a interferência, além dos requisitos essenciais de cumprimento da norma CE relacionados nesta seção, se necessário.
• A conformidade do inversor com os requisitos da norma CE EMC não garante que a toda a máquina ou instalação cumpra esses requisitos. Muitos fatores podem influenciar no atendimento total da norma pela máquina/instalação.
• Os inversores PowerFlex geram distúrbios de baixa freqüência (emissões harmônicas) no sistema de alimentação CA.
Instruções de Compatibilidade Eletromagnética (EMC)
(1) O teste de certificação da norma CE não foi realizado nos inversores com classificação de 600V.

1-26 Instalação/Fiação
Notas Gerais (continuação)• Maiores informações relativas a emissões harmônicas podem ser encontradas
no Manual de Referência do PowerFlex 70/700 (publicação PFLEX-RM001).• No caso da operação em um sistema público de abastecimento de energia, o
instalador ou usuário será responsável por assegurar, consultando o operador da rede de distribuição e a Rockwell Automation, se necessário, que os requisitos aplicáveis estão sendo atendidos.
Requisitos essenciais para o atendimento da norma CEAs condições 1-6 relacionadas abaixo devem ser satisfeitas para que os inversores PowerFlex atendam os requisitos da EN61800-3.
1. Inversor PowerFlex 700 Padrão compatível com as normas CE.
2. Verifique as declarações importantes de precaução/atenção neste manual antes de instalar o inversor.
3. Aterramento conforme descrito na página 1-4.
4. A fiação de tensão de saída, controle (E/S) e sinal deve ser de cabo blindado, trançado com cobertura igual ou superior a 75%, conduíte metálico ou atenuação equivalente.
5. Todos os cabos blindados devem ter sua terminação em um conector blindado apropriado.
6. Condições na Tabela 1.I.
Tabela 1.I PowerFlex 700 Compatibilidade com a norma EN61800-3 EMC
Gab
inet
e Segundo Ambiente (Industrial) (1) (2)
O filtro externo não é necessário se os cabos do motor ficarem restrito ao projeto indicado
(1) O cabo do motor fica limitado a 30 m (98 pés) para instalações no segundo ambiente (industrial) sem filtros de linha externos adicionais.
(2) Consulte o Manual de Referência do PowerFlex 70/700 para as instalações de primeiro ambiente (residencial) e instalações de segundo ambiente com cabos de motor de comprimento superior a 30 m (98 pés).
Primeiro ambienteDistribuição restrita
Qualquer inversor e opção
0-6 Restringir o cabo do motor a 30 m (98 pés) (2)

Capítulo 2
Energização
Este capítulo descreve como colocar o Inversor PowerFlex 700 em funcio- namento. Consulte o Apêndice B para uma descrição resumida sobre a Interface de Operação e Programação (HIM) de LCD.
Antes de alimentar o inversor
❏ 1. Certifique-se de que todas as entradas estejam conectadas aos terminais corretos e de que estejam seguras.
❏ 2. Verifique se a tensão da linha CA no dispositivo de desconexão está dentro do valor nominal do inversor.
❏ 3. Verifique se a tensão de controle está correta.
A parte restante desse procedimento exige a instalação de uma HIM. Se a interface do operador não estiver disponível, devem-se usar os dispositivos remotos para energizar o inversor.
Para informações sobre... Consulte a página...Prepare para a Energização do Inversor 2-1
Indicadores do Status 2-2
Rotinas de Energização 2-3
Operando a Energização S.M.A.R.T. 2-4
Operação de energização com auxílio 2-4
!ATENÇÃO: Deve-se alimentar o inversor para realizar o procedimento de energização a seguir. Algumas das tensões presentes se encontram no potencial da linha de entrada. Para evitar o perigo de choque elétrico ou dano no equipa- mento, o procedimento a seguir deve ser realizado somente por pessoal qualificado. Leia atenciosamente e compreenda o procedimento antes de iniciar. Caso não ocorra um evento durante a realização desse procedimento, Não prossiga. Remova a tensão, incluindo as tensões de controle fornecidas pelo usuário. Podem haver tensões fornecidas pelo usuário, mesmo quando a alimentação principal CA não estiver aplicada ao inversor. Corrija a avaria antes de continuar.
Prepare para a Energização do Inversor

2-2 Energização
Alimentação do inversor
❏ 4. Aplique tensões de controle e tensão CA para o inversor.
Se qualquer uma das seis entradas digitais estiver configurada em “Parada – CF” (CF = Remover Falha) ou “Ativar”, verifique a presença de sinais ou reconfigure a [Sel Entr Digit x]. Se a opção de E/S não estiver instalada (ou seja, nenhum bloco de terminais de E/S), verifique se a [Sel Entr Digit x] não está configurada em “Parada – CF” ou “Ativar”. Se isto não for feito, o inversor não será colocado em funcionamento. Consulte as Descrições dos Alarmes na página 4-10 para uma lista de prováveis conflitos de entradas digitais. Se aparecer um código de falha, consulte o Capítulo 4.
Se, neste momento, o LED de STATUS não estiver piscando na cor verde, consulte os Indicadores de Status abaixo.
❏ 5. Proceda para as Rotinas de Energização.
Figura 2.1 Indicadores do Status do Inversor
Indicadores do Status
➊
➋Esc
7 8 9
4 5 6
1 2 3
. 0 +/-
Sel
Jog
Alt
POWER
STS
PORT
MOD
NET A
NET B
Exp Param #
S.M.A.R.T. Exit Lang Auto / Man Remove
HOT surfaces can cause severe burns
CAUTION
➌
Esc
7 8 9
4 5 6
1 2 3
. 0 +/-
Sel
Jog
Alt
POWER
STS
PORT
MOD
NET A
NET B
Exp Param #
S.M.A.R.T. Exit Lang Auto / Man Remove
HOT surfaces can cause severe burns
CAUTION
Gabinetes 0 e 1
Gabinetes 2 e 3
# Nome Cor Estado Descrição
➊ PWR (Tensão)
Verde Estável Acende quando se alimenta o inversor.
➋ STS (Status)
Verde Piscando O inversor está pronto, mas não está operando e não há presença de falhas.
Estável O inversor está operando, não há presença de falhas.
Amarelo
Consulte a página 4-10
Piscando, inversor parado
Existe uma condição de inibição de partida, o inversor não pode ser inicializado. Verifique o parâmetro 214 [Inib Partida].
Piscando, inversor em funcionamento
Está ocorrendo uma condição de alarme intermitente tipo 1.Verifique o parâmetro 211 [Alarme 1 Inver.].
Estável, inversor em funcionamento
Existe uma condição de alarme contínuo tipo 1.Verifique o parâmetro 211 [Alarme 1 Inver.].
Vermelho
Consulte a página 4-4
Piscando Ocorreu uma falha. Verifique [Código falha x] ou Fila de Falhas.
Estável Ocorreu uma falha não reconfigurável.
➌ PORTA Consulte o Manual do Usuário do Adaptador de Comunicação.
Status das comunicações internas da porta DPI (se houver).
MÓD Status do módulo de comunicações (quando instalado).
REDE A Status da rede (se conectada).
REDE B Status da rede secundária (se conectada).

Energização 2-3
O PowerFlex 700 é projetado para ser colocado em funcionamento (energização) com simplicidade e eficiência. Se você possuir uma HIM de LCD, são fornecidos três métodos que permitem ao usuário selecionar o nível desejado para cada aplicação.
• Energização S.M.A.R.T.Essa rotina permite que você configure o inversor rapidamente programando os valores para as funções mais comumente usadas (veja abaixo e consulte a página 2-4).
• Energização com auxílioEssa rotina solicita informações necessárias para energizar o inversor para a maioria das aplicações, tais como os dados da linha e do motor, parâmetros comumente ajustados e E/S. A opção com Controle Vetorial fornece dois níveis de energização com auxílio: básica e detalhada. Consulte a página 2-4.
• Energização da prova de torque/elevaçãoAs aplicações de prova de torque podem usar a Energização com Auxílio para ajustar o motor. Entretanto, recomenda-se desconectar o motor de guinchos/guindastes durante a rotina. Se isso não for possível, consulte o procedimento de ajuste manual na página C-2.
Figura 2.2 Menu de Energização da Opção com Controle Padrão
Informação importanteA tensão deve ser aplicada ao inversor durante a visualização ou mudança de parâmetros. A programação anterior pode afetar o status e operação do inversor quando a tensão é aplicada. Se a gaveta de E/S tiver sido alterada, deve-se realizar a operação de restaurar os defaults.
Figura 2.3 Menu de Energização da Opção de Controle Vetorial
(1) Consulte a página 2-4.
Rotinas de Energização
Energização
Digitar Dados Nominais do Motor,
Modo Parada, Tempos Acel/
Desacel de Rampa
Dados do Motor e Tempos de Rampa
Otimizar Torquee
Verificar Sentido
Testes do Motor (1)
Estabelecer Velocidade
Mín/Máx e Controle de Sentido
Limites de Velocidade
Configurar Fonte, Valor e Escala
para Referênciasde Velocidades
Controle deVelocidade
Partida/ Parada/E/S
Configurar Método deControle (2 fios/3 fios),
E/S, Entradas/ Saídas Digitais, e Saídas Analógicas
Pronto / Saída
Menu Principal:
Configurar o método
de controle do motor
Seleção de controle do motor
Energização
Digitar Dados Nominais do Motor,
Modo Parada, Tempos Acel/
Desacel de Rampa
Dados do Motor e Tempos de Rampa
Otimizar Torque e
Verificar Sentido
Testes do Motor (1)
Estabelecer Velocidade
Mín/Máx e Controle de Sentido
Limites deVelocidade
Configurar Fonte, Valor e Escala
para Referências de Velocidades
Controle deVelocidade/Torque
Partida/ Parada/E/S
Configurar Método de Controle
(2 fios/3 fios), E/S, Entradas/
Saídas Digitais, e Saídas Analógicas
Aplicação
Configurar paraa aplicação específica
Pronto/ Saída
Menu Principal:

2-4 Energização
(1) Durante os procedimentos de ajuste e testes do motor o inversor poderá modificar certos valores de parâmetros para uma operação de energização apropriada. Esses valores retornam posteriormente aos seus valores originais quando a energização estiver concluída. Os parâmetros afetados são: 053, 080, 276, 278 e 361-366. Caso a tensão seja removida do inversor durante os testes, sem abortar procedimento de auto-sintonia, esses parâmetros talvez não retornem aos seus valores originais. Se isso ocorrer, restaure o inversor aos seus defaults de fábrica e repita o procedimento de energização.
Durante a energização, a maioria das aplicações exige mudanças de um pequeno número de parâmetros. A HIM de LCD no inversor PowerFlex 700 oferece a energização S.M.A.R.T., que exibe os parâmetros mais comumente mudados. Com esses parâmetros, você pode configurar as funções seguintes:
S - Modo de Partida e Modo de ParadaM - Velocidade Mínima e MáximaA - Tempo de Aceleração 1 e Tempo de Desaceleração 1R - Fonte de ReferênciaT - Sobrecarga Térmica do Motor
Para executar a rotina de energização S.M.A.R.T.:
Importante: Essa rotina de energização requer uma HIM de LCD.
A rotina de energização com Auxílio faz perguntas simples do tipo “sim” ou “não” e solicita que você introduza as informações necessárias. Acesse a Energização com Auxílio selecionando “Start Up” (Energização) a partir do Menu Principal.
Para realizar uma energização com auxílio
Operando a Energização S.M.A.R.T.
Etapa Tecla(s) Exemplo de Displays de LCD
1. Pressione ALT e após pressione Esc (S.M.A.R.T.). Aparecerá a tela de energização S.M.A.R.T.
2. Visualize e mude os valores de parâmetros conforme desejado. Para obter informações sobre a HIM, consulte o Apêndice B.
3. Pressione Esc para sair da energização S.M.A.R.T.
ALT Esc
Esc
F-> Parado Auto
0,0 HzMenu Principal:DiagnósticosParâmetro
Lista SMART:Sel Ent Digital2Modo Parada AVelocidade mínima
Operação de energização com auxílio
Etapa Tecla(s) Exemplo de Displays de LCD
1. No Menu Principal, pressione a Seta para Cima ou Seta par Baixo para movimentar-se até “Energização”.
2. Pressione Enter.
F-> Parado Auto
0,0 HzMenu Principal:Armazenamento de MemóriaEnergizaçãoPreferências

Capítulo 3
Programação e Parâmetros
O Capítulo 3 fornece uma lista e descrições completas dos parâmetros do PowerFlex 700. Os parâmetros podem ser programados (visualizados/editados) utilizando uma HIM (Human Interface Module - Interface de Operação e Pro- gramação) de LCD. Como uma alternativa, a programação pode ser também feita utilizando o software DriveExplorer™ ou DriveExecutive™ e um computador pessoal. Consulte o Apêndice B para uma descrição breve da HIM de LCD.
Para configurar o inversor a fim de que ele opere de uma maneira específica, os parâmetros devem ser configurados. Existem três tipos de parâmetros:
• Parâmetros ENUMOs parâmetros ENUM permitem selecionar 2 ou mais itens. A HIM de LCD exibirá uma mensagem de texto para cada item.
• Parâmetros de BitParâmetros de bit possuem bits individuais relacionados a características ou condições. Se o bit for zero, a característica está desligada ou a condição é falsa. Se o bit for 1, a característica está ligada ou a condição é verdadeira.
• Parâmetros NuméricosEsses parâmetros possuem um valor numérico único (por exemplo, 0,1 Volt).
O exemplo na página seguinte mostra como cada tipo de parâmetro é apresentado neste manual.
Para informações sobre... Consulte a página...
Informações sobre os Parâmetros 3-1
Como os parâmetros são organizados 3-3
Arquivo de Monitoração 3-12
Arquivo de Controle do Motor 3-14
Arquivo do Comando de Velocidade 3-21
Arquivo de Controle Dinâmico 3-31
Arquivo Utilitário 3-38
Arquivo de Comunicação 3-49
Arquivo de Entradas e Saídas 3-53
Arquivo de Aplicações 3-59
Referência Cruzada de Parâmetros - por Nome 3-61
Referência Cruzada de Parâmetros - por Número 3-64
Informações sobre os Parâmetros

3-2 Programação e Parâmetros
Arquiv
o
Gru
po
No.
Nome e Descrição do Parâmetro Valores Parâ
met
ros
rela
cion
ados
UTIL
ITÁR
IO
Inve
rsor
...
198 [Carreg Cfg Usuar]Carrega um conjunto de valores de parâmetros previamente gravado de um endereço selecionado de conjunto do usuário na memória não volátil para a memória ativa do inversor.
Default:Opções:
00123
“Pronto”“Pronto”“Conjunto do Usuário1”“Conjunto do Usuário2”“Conjunto do Usuário3”
199
Diag
nóst
icos
216 [Status Ent Dig]Status das entradas digitais.
MO
TOR
...
Torq
...
434 [Mult Ref Trq B]Define o valor do mutilplicador para a seleção da [Sel Ref Torque B].
Default:Mín/Máx:Unidades:
1,0–/+32767,00,1
000 000xxxxxxxxxx10 01234567891112131415
1=Entrada Presente0=Entrada Não Presentex =Reservado
No. Bit
Ent D
igita
l1
Ent D
igita
l2
Ent D
igita
l3
Ent D
igita
l4
Ent D
igita
l5
Ent D
igita
l6
FV
Vector
➊ ➌➋ ➏➎➍
No. Descrição
➊ Arquivo – Relaciona a principal categoria de arquivo de parâmetros.
➋ Grupo – Relaciona o grupo de parâmetros dentro de um arquivo.
➌ No. – Número do parâmetro. = O valor do parâmetro não pode ser alterado até que o inversor esteja parado.
= Parâmetro de 32 bits na opção com controle padrão. Todos os parâmetros na opção com controle vetorial são de 32 bits.
= Parâmetro exibido somente quando a [Modo Desemp. Trq] estiver configurada em “4”.
➍ Nome e Descrição dos Parâmetros – O nome dos parâmetros conforme eles aparecem na HIM de LCD, com uma breve descrição de suas funções.
= Este parâmetro é específico da opção com controle padrão.
= Este parâmetro estará disponível somente na opção com controle vetorial.
= Disponível somente nas versões de firmware 3.xxx e posteriores da opção com controle vetorial.
➎ Valores – Define as diversas características operacionais do parâmetro. Existem três tipos:
ENUM Default:Opções:
Relaciona o valor atribuído na fábrica. “Leitura Somente” = sem default.Exibe as seleções de programação disponíveis.
Bit Bit: Relaciona o detentor da posição e a definição para cada bit.
Numérico Default:Mín/Máx:Unidades:
Relaciona o valor atribuído na fábrica. “Leitura Somente” = sem default.A possível faixa (a menor e a mais elevada configuração) para o parâmetro.Unidade de medida e resolução conforme indicadas na HIM de LCD.
Importante: Alguns parâmetros terão dois valores unitários:• As entradas analógicas podem ser configuradas para corrente ou tensão com o parâmetro 320 [Config
Entr Anlg]. • Configurar o parâmetro 79, [Speed Units], nos inversores com controle vetorial seleciona Hz
ou RPM.• Valores que concernem somente os inversores com controle vetorial serão indicados por “ ” ou “ ”
para a firmware de vetor versão 3.xxx e posteriores.
Importante: Ao enviar valores pelas portas DPI, basta remover o ponto decimal para obter o valor correto (por exemplo, para enviar “5,00 Hz,” use “500”).
➏ Relacionados – Lista os parâmetros (se houver) que interagem com o parâmetro selecionado. O símbolo “ ” indica que informações adicionais sobre o parâmetro se encontram disponíveis no Apêndice C.
32
FV
Standard
Vector
Vector v3
Vector v3

Programação e Parâmetros 3-3
A HIM de LCD exibe os parâmetros na ordem de visualização Arquivo-Grupo- Parâmetro ou em uma Lista Numerada. Para alternar o modo de display, acesse o Menu Principal, pressione ALT e após Sel enquanto o cursor estiver sobre a seleção do parâmetro. Além disso, utilizando [Niv Aces Param], o usuário tem a opção de exibir todos os parâmetros, os parâmetros comumente usados ou os parâmetros de diagnóstico.
Opções de controle
Duas opções de controle distintas estão disponíveis para o PowerFlex 700: padrão e vetorial. A opção com controle padrão fornece a operação típica Volts por Hertz e Vetor Sensorless. A opção com controle vetorial fornece a capacidade adicional de controle vetorial FVC. A gaveta determina o tipo de controle disponível (veja o diagrama).
Para simplificar a programação com a opção de controle vetorial, os parâmetros exibidos mudarão de acordo com a seleção feita com [Sel Contr Motor]. Por exemplo, caso seja selecionado “Vetor FVC”, os parâmetros associados apenas com outras operações tais como Volts por Hertz ou Vetor Sensorless serão ocultados. Consulte as páginas 3-4 a 3-8.
Ordem Arquivo-Grupo-Parâmetro
Isto simplifica a programação, agrupando parâmetros que são usados para funções similares. Os parâmetros são organizados em arquivos. Cada arquivo é dividido em grupos e cada parâmetro é um elemento no grupo. Por default, a HIM de LCD exibe os parâmetros na ordem de visualização Arquivo-Grupo-Parâmetro.
Visualização de Lista NumeradaTodos os parâmetros estão em ordem numérica.
Como os parâmetros são organizados
Opção com controle padrão
Opção com controle vetorial

3-4 Programação e Parâmetros
Visualização de parâmetros básicos – opção com controle padrãoParâmetro 196 [Niv Aces Param] configurado na opção 0 “Básico”.
Arquivo Grupo Parâmetros
Monitoração Medição Freq Saida 001Freq Comandada 002Corrente Saida 003Tensão Barram CC 012
Controle do Motor
Dados do Motor
Volts Mtr ID. 041Amps Mtr ID. 042Hettz Mtr ID. 043
RPM Mtr ID. 044Potência Mtr ID. 045Unid Pot Mtr ID. 046
Tipo Sobrec Mtr 047
Atributos de Torque Modo Desemp. Trq 053Tensão Maxima 054
Freq. Maxima 055Auto-ajuste 061
Comando de Velocidade
Modo & Lim Veloc Veloc Minima 081Velocidade Max. 082
Referências de Velocidade
Sel Ref Veloc A 090Sel Ref Veloc B 093Ref Super Vel A 091
Ref Super Vel B 094Ref Infer Vel A 092 Ref Infer Vel B 095
Sel Ref Man BT 096Ref Super Man BT 097 Ref Infer Man BT 098
Velocidades Discretas
Veloc. de Jog 1 100Vel Preset 1-7 101-107
Controle Dinâmico
Taxas de Rampas Tempo Acelerac 1 140Tempo Acelerac 2 141
Tempo Desacele 1 142 Tempo Desacele 2 143
% Curva-S 146
Limites de Carga Sel Limite Corr 147Val Limite Corr 148
Modos de Parada/Frenagem
Modo Parada A 155Modo Parada B 156
SelNivel Fren CC 157Nivel Fren CC 158Tempo Fren CC 159
Mod Reg Barram A 161 Mod Reg Barram B 162Tipo Resistor FD 163
Modos de Reinicialização
Partida Energiz 168 Tentat Rein Auto 174 Temp entre tent 175
Perda de potência Modo Perda Pot 184 Tempo Perda Pot 185
Utilitário Configuração de Direção
Modo Direcao 190
Memória do Inversor Niv Aces Param 196Volta p/ Default 197Carreg Cfg Usuar 198
Grava Cnfg Usuar 199Idioma 201
Falhas Config Falha 1 238
Entradas e Saídas
Entradas Analógicas Config Entr Anlg 320Entr Anlg Sup 1 322Entr Anlg Sup 2 325
Entr Anlg Inf 1 323Entr Anlg Inf 2 326
Saídas Analógicas Sel Saida Analg1 342Saida Analg1 Sup 343Saida Analg1 Inf 344
Entradas Digitais Sel Entr Digit 1-6 361-366
Saídas Digitais Sel Saida Dig 1 380Sel Saida Dig 2 384
Niv Saida Dig 1 381Niv Saida Dig 2 385
Monitoração
Controle do Motor
Comando de Velocidade
Controle Dinâmico
Utilitário
Entradas e Saídas

Programação e Parâmetros 3-5
Visualização de parâmetros básicos – opção com controle vetorialParâmetro 196 [Niv Aces Param] configurado na opção 0 “Básico”.
**Esses parâmetros serão exibidos somente quando o parâmetro 053 [Sel Cont Motor] estiver configurado na opção “4”.
Arquivo Grupo Parâmetros
Monitoração Medição Freq Saida 001Freq Comandada 002Torque comandado** 024Corrente Saida 003Corrente Torque 004Tensão Barram CC 012
Controle do Motor
Dados do Motor Volts Mtr ID. 041Amps Mtr ID. 042Hettz Mtr ID. 043
RPM Mtr ID. 044Potência Mtr ID. 045Unid Pot Mtr ID. 046
Tipo Sobrec Mtr 047Polos motor 049
Atributos de Torque Modo Desemp. Trq 053Tensão Maxima 054Freq. Maxima 055Auto-ajuste 061
Auto-ajuste trq ** 066Auto-ajust inérc** 067Ref Torque A** 427Ref Sup Trq A** 428
Ref Inf Trq A ** 429Limite Trq Pos** 436Limite Trq Neg** 437
Feedback de velocidade
Tipo Fdbk motor 412 PPR Encoder 413
Comando de Velocidade
Modo & Lim Veloc Speed Units 079Modo Velocidade 080
Veloc Minima 081Velocidade Max. 082
Limite veloc rev** 454
Referências de Velocidade
Sel Ref Veloc A 090Ref Super Vel A 091Ref Infer Vel A 092 Sel Ref Veloc B 093
Ref Super Vel B 094Ref Infer Vel B 095Sel Ref Man BT 096Ref Super Man BT 097
Ref Infer Man BT 098Ref. ent. pulso 099
Velocidades Discretas
Veloc. de Jog 1 100Vel Preset 1-7 101-107
Veloc. de Jog 2 108
Controle Dinâmico
Taxas de Rampas Tempo Acelerac 1 140Tempo Acelerac 2 141
Tempo Desacele 1 142 Tempo Desacele 2 143
% Curva-S 146
Limites de Carga Sel Limite Corr 147 Val Limite Corr 148
Modos de Parada/Frenagem
Modo Parada/Fren A 155Modo Parada/Fren B 156
SelNivel Fren CC 157Nivel Fren CC 158Tempo Fren CC 159
Mod Reg Barram A 161 Mod Reg Barram B 162Tipo Resistor FD 163
Modos de Reinicialização
Partida Energiz 168 Tentat Rein Auto 174 Temp entre tent 175
Perda de potência Modo Perda Pot 184 Tempo Perda Pot 185 Nível perda Pot 186
Utilitário Configuração de Direção
Modo Direcao 190
Memória do Inversor Niv Aces Param 196Volta p/ Default 197
Carreg Cfg Usuar 198Grava Cnfg Usuar 199
Idioma 201
Diagnósticos Inib Partida 214 Status Ent Dig 216 Status Saida Dig 217
Falhas Config Falha 1 238
Alarmes Config Alarme 1 259
Entradas e Saídas
Entradas Analógicas Config Entr Anlg 320Entr Anlg Sup 1 322Entr Anlg Inf 1 323
Entr Anlg Sup 2 325Entr Anlg Inf 2 326
Saídas Analógicas Sel Saida Analg1, 2 342Saida Analg1 Sup 343
Saida Analg1 Inf 344Sel Saida Analg2 345
Saida Analg2 Sup 346Saida Analg2 Inf 347
Entradas Digitais Sel Entr Digit 1-6 361-366
Saídas Digitais Sel Saida Dig1-3 380-388 Niv Saida Dig 1-3 381-389
Monitoração
Controle do Motor
Comando de Velocidade
Controle Dinâmico
Utilitário
Entradas e Saídas

3-6 Programação e Parâmetros
Visualização de parâmetros avançados – opção com controle padrãoParâmetro 196 [Niv Aces Param] configurado na opção 1 “Avançado”.
Arquivo Grupo Parâmetros
Monitoração Medição Freq Saida 001Freq Comandada 002Corrente Saida 003Corrente Torque 004Corrente Fluxo 005
Tensão de Saída 006Pot. de Saida 007Fator Pot. Saida 008MWh decorrido 009Tempo funcionam. 010
Freq MOP 011Tensão Barram CC 012Mem. Barram CC 013Val. Ent. Anal 1 016Val. Ent. Anal 2 017
Dados do Inversor kW Nominal 026Tensão Nominal 027
Corrente Nominal 028Versão SFW 029
Controle do Motor
Dados do Motor Tipo do Motor 040Volts Mtr ID. 041Amps Mtr ID. 042Hettz Mtr ID. 043
RPM Mtr ID. 044Potência Mtr ID. 045Unid Pot Mtr ID. 046Tipo Sobrec Mtr 047
Fator sobrec mtr 048
Atributos de Torque Modo Desemp. Trq 053Tensão Maxima 054Freq. Maxima 055Compensacao 056
Modo Fluxo 057Tempo Fluxo 058Filtro boost SV 059Auto-ajuste 061
Queda tensão RI 062Refer.Corr.Fluxo 063Queda tens indut 064
Volts por Hertz Ref. Part./Acel 069Ref. Operacao 070
Tensão de Quebra 071Freq. de Quebra 072
Comando de Velocidade
Modo & Lim Veloc Modo Velocidade 080Veloc Minima 081Velocidade Max. 082
Limite Sobrevel 083Inibição Freq 1 084Inibição Freq 2 085
Inibição Freq 3 086Banda Inib freq 087
Referências de Velocidade
Sel Ref Veloc A 090Ref Super Vel A 091Ref Infer Vel A 092
Sel Ref Veloc B 093Ref Super Vel B 094Ref Infer Vel B 095
Sel Ref Man BT 096Ref Super Man BT 097 Ref Infer Man BT 098
Velocidades Discretas
Veloc. de Jog 100Vel Preset 1-7 101-107
Ajuste de Velocidade
Selec Ent Ajuste 117Sel Said Ajuste 118
Ajuste Superior 119Ajuste Inferior 120
Compensação de Escorregamento
Escor RPM@ I.nom 121Ganho Comp. Esc. 122
Medid RPM Escorr 123
Processo PI Config PI 124Controle do PI 125Sel Refer de PI 126Refer do PI 127Sel Feedback PI 128
Tempo Integr PI 129Ganho Prop PI 130Limite Inf PI 131Limite Sup de PI 132Pre-Carga do PI 133
Status do PI 134Medidor Refer PI 135Medidor Fdback PI 136Medidor Erro PI 137Medidor Saida PI 138
Controle Dinâmico
Taxas de Rampas Tempo Acelerac 1 140Tempo Acelerac 2 141
Tempo Desacele 1 142 Tempo Desacele 2 143
% Curva-S 146
Limites de Carga Sel Limite Corr 147Val Limite Corr 148 Ganho Limite Corr 149
Modo Sobrecar Inv 150Frequencia PMW 151
Modos de Parada/Frenagem
Modo Parada A 155Modo Parada B 156SelNivel Fren CC 157Nivel Fren CC 158
Tempo Fren CC 159Ki Reg Barram 160Mod Reg Barram A 161 Mod Reg Barram B 162
Tipo Resistor FD 163Kp Reg Barram 164Kd Reg Barram 165
Modos de Reinicialização
Partida Energiz 168Partid Mov Ativ 169Ganho Part Movim 170Tentat Rein Auto 174
Temp entre tent 175Modo ativ-inativ 178Ref ativ- inativ 179Nív. ativ-inativ 180
Tempo ativo 181Nivelinativo 182Tempo inativo 183
Perda de potência Modo Perda Pot 184Tempo Perda Pot 185Nível Perda Pot 186
Monitoração
Controle do Motor
Comando de Velocidade
Controle Dinâmico

Programação e Parâmetros 3-7
Utilitário Configuração de Direção
Modo Direcao 190
Config Ref HIM Grava Refer HIM 192Pre-cargaREFMan 193
Config MOP Grava Refer. MOP 194Taxa MOP 195
Memória do Inversor Niv Aces Param 196Volta p/ Default 197Carreg Cfg Usuar 198
Grava Cnfg Usuar 199Reset Medid 200Idioma 201
Classe Tensão 202Checksum Inv 203
Diagnósticos Status Inversor1 209Status Inversor2 210Alarme 1 Inver. 211Alarme 2 Inver. 212Fonte Ref Veloc 213Inib Partida 214Fonte Ult Parada 215Status Ent Dig 216
Status Saida Dig 217Temp Inv 218Cont. Sbrcor Inv 219Cont. Sobrec mot 220Velocidade falha 224Falha Corrente 225FalhaTens Barram 226Status Falha 1 227
Status Falha 2 228Alarme 1 Falha 229Alarme 2 Falha 230Sel Ponto Teste1 234DadoPonto Teste1 235Sel Ponto Teste2 236DadoPonto Teste2 237
Falhas Config Falha 1 238Remocao Falha 240
Modo Remoc Falha 241Marcad Energizaç 242
Codigo Falha 1-8 243-257Tempo Falha 1-8 244-258
Alarmes Config Alarme 1 259Remoção Alarme 261
Código Alarmes 1-8 262-269
Comunicação Controle de Comun. Taxa Dados DPI 270Res Logic Inver 271
Res. Ref. Inver 272Res. Rampa Inver 273
Máscaras e Controles
Mascara Logica 276Mascara de Liga 277Mascara de Jog 278Mascara Direcao 279Mascara Refer. 280Mascara Acelerac 281Mascara Desacele 282
Masc. Rem. Falha 283Mascara de MOP 284Mascara Local 285Controle Desliga 288 Controle Partida 289Controle de JOG 290Controle Direcao 291
Controle Referen 292Controle Aceler 293Controle Desacele 294ControlRem.Falha 295Controle de MOP 296Controle Local 297
Links de dados Dados Entrada A1-D2 300-307Dado Saida A1-D2 310-317
Entradas e Saídas
Entradas Analógicas Config Entr Anlg 320RaizQuad Ent Anl 321Entr Anlg Sup 1 322
Entr Anlg Sup 2 325Entr Anlg Inf 1 323Entr Anlg Inf 2 326
Perda EntAnlg 1 324Perda EntAnlg 2 327
Saídas Analógicas Conf Saída Analg 340Absol Saida Anlg 341Sel Saida Analg1 342
Saida Analg1 Sup 343Saida Analg1 Inf 344
Entradas Digitais Sel Entr Digit 1-6 361-366
Saídas Digitais Sel Saida Dig 1 380Sel Saida Dig 2 384Niv Saida Dig 1 381
Niv Saida Dig 2 385TempLigSaidDig 1 382TempLigSaidDig 2 386
TempDslSaidDig 1 383TempDslSaidDig 2 387
Arquivo Grupo Parâmetros
Utilitário
Comunicação
Entradas e Saídas

3-8 Programação e Parâmetros
Visualização de parâmetros avançados – opção com controle vetorialParâmetro 196 [Niv Aces Param] configurado na opção 1 “Avançado”.
Arquivo Grupo Parâmetros
Monitoração Medição Freq Saida 001Freq Comandada 002Veloc. rampeada 022Ref. velocidade 023Torque comandado** 024Feedback veloc. 025Corrente Saida 003
Corrente Torque 004Corrente Fluxo 005Tensão de Saída 006Pot. de Saida 007Fator Pot. Saida 008MWh decorrido 009Tempo funcionam. 010
Referência MOP 011Tensão Barram CC 012Mem. Barram CC 013Val. Ent. Anal 1 016Val. Ent. Anal 2 017kWh consumido 0143.x
Dados do Inversor kW Nominal 026Tensão Nominal 027
Corrente Nominal 028Versão SFW 029
Controle do Motor
Dados do Motor Tipo do Motor 040Volts Mtr ID. 041Amps Mtr ID. 042Hettz Mtr ID. 043
RPM Mtr ID. 044Potência Mtr ID. 045Unid Pot Mtr ID. 046Tipo Sobrec Mtr 047
Fator sobrec mtr 048Polos motor 049
Atributos de Torque Modo Desemp. Trq 053Tensão Maxima 054Freq. Maxima 055Compensacao 056Modo Fluxo 057Tempo Fluxo 058Filtro boost SV 059Auto-ajuste 061Queda tensão RI 062
Refer.Corr.Fluxo 063Queda tens indut 064Auto-ajuste trq ** 066Auto-ajust inérc** 067Ref Torque A** 427Ref Sup Trq A** 428Ref Inf Trq A ** 429Div Ref Torque A** 430Ref Torque B** 431
Ref Sup Torque B** 432Ref Inf Torque B** 433Mult Ref Trq B** 434Pto ajuste trq 1** 435Pto ajuste trq 2** 4383.xLimite Trq Pos** 436Limite Trq Neg** 437Status controle** 440Ref. Corr. Trq** 441
Volts por Hertz Ref. Part./Acel 069Ref. Operacao* 070
Tensão de Quebra* 071Freq. de Quebra* 072
Feedback de velocidade
Tipo Fdbk motor 412PPR Encoder 413Feedback Pos Enc 414Veloc. Encoder 415
Sel Filtro Fdbk 416Freq Filtro Ent.** 419K Filtro Entalhe** 420
Pulso Marcador 421Escala Ent Pulso 422Canal Z Encoder 423
Comando de Velocidade
Modo & Lim Veloc Speed Units 079Modo Velocidade 080Veloc Minima 081Velocidade Max. 082
Limite Sobrevel 083Inibição Freq 1* 084Inibição Freq 2* 085Inibição Freq 3* 086
Banda Inib freq* 087Speed/Torque Mod** 088Limite veloc rev** 454
Referências de Velocidade
Sel Ref Veloc A 090Ref Super Vel A 091Ref Infer Vel A 092 Sel Ref Veloc B 093
Ref Super Vel B 094Ref Infer Vel B 095Sel Ref Man BT 096
Ref Super Man BT 097 Ref Infer Man BT 098Ref. ent. pulso 099
Velocidades Discretas
Veloc. de Jog 1 100 Vel Preset 1-7 101-107 Veloc. de Jog 2 108
Ajuste de Velocidade
Selec Ent Ajuste 117Sel Said Ajuste 118
Ajuste Superior 119Ajuste Inferior 120
Refer % Ajuste 1163.x
Compensação de Escorregamento
Escor RPM@ I.nom 121 Ganho Comp. Esc.* 122 Medid RPM Escorr 123
Processo PI Config PI 124Controle do PI 125Sel Refer de PI 126Refer do PI 127Sel Feedback PI 128Tempo Integr PI 129Ganho Prop PI 130
Limite Inf PI 131Limite Sup de PI 132Pre-Carga do PI 133Status do PI 134Medidor Refer PI 135Medidor Fdback PI 136Medidor Erro PI 137
Medidor Saida PI 138Referên. PI sup. 460Referên. PI inf. 461Feedback PI sup 462Feedback PI inf 463Filtro LBPI 1392.xTempo deriv PI 4593.x
Regulador de velocidade
Loop veloc. Ki** 445Loop veloc. Kp** 446
Loop veloc. Kf** 447LB desejada vel.** 449
Inércia Total** 450Medida Vel Circ** 4513.x
Controle Dinâmico
Taxas de Rampas Tempo Acelerac 1, 2 140,141 Tempo Desacele 1, 2 142,143 % Curva-S 146
Limites de Carga Sel Limite Corr 147Val Limite Corr 148 Ganho Limite Corr 149
Modo Sobrecar Inv 150Frequencia PMW 151Queda RPM @ Inom 152
Lim. força regen** 153Lim. taxa corr.** 154
Monitoração
Controle do Motor
Comando de Velocidade
Controle Dinâmico

Programação e Parâmetros 3-9
* Esses parâmetros serão exibidos somente quando o parâmetro 053 [Sel Cont Motor] estiver configurado na opção “2 ou 3”.** Esses parâmetros serão exibidos somente quando o parâmetro 053 [Sel Cont Motor] estiver configurado na opção “4”.2.x Somente Firmware versão 2.001 e posteriores.3.x Somente Firmware versão 3.001 e posteriores.
Controle Dinâmicocontinuação
Modos de Parada/Frenagem
Modo Parada/Fren 155,156SelNivel Fren CC 157Nivel Fren CC 158Tempo Fren CC 159
Ki Reg Barram* 160Mod Reg Barram 161,162Tipo Resistor FD 163Kp Reg Barram* 164
Kd Reg Barram* 165Fluxo de Fren. 166FD parado 1453.x
Modos de Reinicialização
Partida Energiz 168Partid Mov Ativ 169Ganho Part Movim 170Tentat Rein Auto 174
Temp entre tent 175Modo ativ-inativ 178Ref ativ- inativ 179Nív. ativ-inativ 180
Tempo ativo 181Nivelinativo 182Tempo inativo 183Retardo Energiz 167
Perda de potência Modo Perda Pot 184Tempo Perda Pot 185Nível perda Pot 186
Nív Perda Carga 1873.xTempoPerdaCarga 1883.xTempo PinoProt 1893.x
Nível Adv Terra 1773.x
Utilitário Configuração de Direção
Modo Direcao 190
Config Ref HIM Grava Refer HIM 192 Pre-cargaREFMan 193
Config MOP Grava Refer. MOP 194 Taxa MOP 195
Memória do Inversor Niv Aces Param 196Volta p/ Default 197Carreg Cfg Usuar 198
Grava Cnfg Usuar 199Reset Medid 200Idioma 201
Classe Tensão 202Checksum Inv 203
Diagnósticos Status Inversor1, 2 209,210Alarme 1, 2 Inver. 211,212Fonte Ref Veloc 213Inib Partida 214Fonte Ult Parada 215Status Ent Dig 216
Status Saida Dig 217Temp Inv 218Cont. Sbrcor Inv 219Cont. Sobrec mot 220Velocidade falha 224Falha Corrente 225
FalhaTens Barram 226Status Falha 1,2 227,228Alarme 1,2 na Falha 229,230Sel Ponto Teste1,2 234,236DadoPonto Teste1,2 235,237
Falhas Config Falha 1 238Remocao Falha 240
Modo Remoc Falha 241Marcad Energizaç 242
Codigo Falha 1-8 243-257Tempo Falha 1-8 244-258
Alarmes Config Alarme 1 259 Remoção Alarme 261 Código Alarmes 1-8 262-269
Blocos de escala Esc.1, 2 Valor Ent. 476,482Esc.3, 4 Valor Ent. 488,4943.xEsc.1, 2 Ent. Sup. 477,483Esc.3, 4 Ent. Sup. 489,4953.x
Esc.1, 2 Ent. Inf. 478,484Esc. 3, 4 Ent. Inf. 490,4963.xEsc.1, 2 Saída Sup. 479,485Esc. 3, 4 Saída Sup. 491,4973.x
Esc.1,2 Saída Inf. 480,486Esc. 3, 4 Saída Inf. 492,4983.xEsc.1,2 ValorSaída 481,487Esc. 3, 4 ValorSaída 493,4993.x
Comunicação Controle de Comun. Taxa Dados DPI 270Res Logic Inver 271
Res. Ref. Inver 272Res. Rampa Inver 273
Seleç. Porta DPI 274Valor Porta DPI 275
Máscaras e Controles
Mascara Logica 276Mascara de Liga 277Mascara de Jog 278Mascara Direcao 279Mascara Refer. 280Mascara Acelerac 281Mascara Desacele 282Masc. Rem. Falha 283
Mascara de MOP 284Mascara Local 285Controle Desliga 288 Controle Partida 289Controle de JOG 290Controle Direcao 291Controle Referen 292Controle Aceler 293
Controle Desacele 294ControlRem.Falha 295Controle de MOP 296Controle Local 297Selecao REF DPI 2983.x
Selecao Fdbk DPI 2993.x
Links de dados Dados Entrada A1-D2 300-307 Dado Saida A1-D2 310-317
Entradas e Saídas
Entradas Analógicas Config Entr Anlg 320RaizQuad Ent Anl 321
Entr Anlg Sup 1, 2 322,325Entr Anlg Inf 1, 2 323,326
Perda Ent Anlg1, 2 324,327
Saídas Analógicas Conf Saída Analg 340Absol Saida Anlg 341Sel Saida Analg1, 2 342,345
Sel Saida Analg1, 2 Sup 343,346Saida Analg1, 2 Inf 344,347
Esc Saída Anal1, 2 354,3553.x
Ajuste Sai Anal 377,3783.x
Entradas Digitais Sel Entr Digit 1-6 361-366
Saídas Digitais Sel Saida Dig 380,384,388Niv Saida Dig 381,385,389
TempLigSaidDig 382,386,390TempDslSaidDig 383,387,391
Ajuste Sai Dig 3793.x
Aplicações3.x Prova de torque3.x ConfigProvaTrq 6003.x
AjusteProvaTrq 6013.x
BandaDesvioVel 6023.x
IntegBandaVel 6033.x
TpoDestravFreio 6043.x
TempoOscVelZero 6053.x
TolerânciaOscil 6063.x
TempoAjusFreio 6073.x
TaxaVirLimTrq 6083.x
Cont Esc Freio 6093.x
Perc alarm freio 6103.x
% Esc Micropos 6113.x
Arquivo Grupo Parâmetros
Controle Dinâmico
Utilitário
Comunicação
Entradas e Saídas
Aplicações

3-10 Programação e Parâmetros
Visualização dos Parâmetros Básicos de Vent./Bomba (1) – Opção com Controle PadrãoParâmetro 196 [Niv Aces Param] configurado na opção 3 “Vent./Bomba”.
(1)Somente disponível nos inversores com controle padrão e com a versão de firmware 3.001 ou superior.
Arquivo Grupo Parâmetros
Monitoração Medição Freq Saida 001Freq Comandada 002Corrente Saida 003Pot. de Saida 007
MWh decorrido 009Tempo funcionam. 010Tensão Barram CC 012Val. Ent. Anal 1 016
Controle do Motor
Dados do Motor Volts Mtr ID. 041Amps Mtr ID. 042Hettz Mtr ID. 043
RPM Mtr ID. 044Potência Mtr ID. 045Unid Pot Mtr ID. 046
Atributos de Torque Tensão Maxima 054Freq. Maxima 055
Volts por Hertz Ref. Part./Acel 069Ref. Operacao 070
Tensão de Quebra 071Freq. de Quebra 072
Comando de Velocidade
Modo & Lim Veloc Modo Velocidade 080Veloc Minima 081Velocidade Max. 082
Limite Sobrevel 083Inibição Freq 1 084Banda Inib freq 087
Referências de Velocidade
Sel Ref Veloc A 090Ref Super Vel A 091Ref Infer Vel A 092
Velocidades Discretas
Vel Preset 2 102
Controle Dinâmico
Taxas de Rampas Tempo Acelerac 1 140Tempo Desacele 1 142
Limites de Carga Val Limite Corr 148
Modos de Parada/Frenagem
Modo Parada A 155
Modos de Reinicialização
Partida Energiz 168Tentat Rein Auto 174Temp entre tent 175
Utilitário Memória do Inversor Niv Aces Param 196Volta p/ Default 197Idioma 201
Diagnósticos Inib Partida 214Status Ent Dig 216Status Saida Dig 217
Entradas e Saídas
Entradas Analógicas Config Entr Anlg 320RaizQuad Ent Anl 321Entr Anlg Sup 1 322
Entr Anlg Inf 1 323Perda EntAnlg 1 324
Saídas Analógicas Conf Saída Analg 340Sel Saida Analg1 342
Saida Analg1 Sup 343Saida Analg1 Inf 344
Entradas Digitais Sel Entr Digit 1-6 361-366
Saídas Digitais Sel Saida Dig 1 380Sel Saida Dig 2 384Niv Saida Dig 1 381
Niv Saida Dig 2 385
Monitoração
Controle do Motor
Comando de Velocidade
Controle Dinâmico
Utilitário
Entradas e Saídas

Programação e Parâmetros 3-11
Visualização dos Parâmetros Avançados de Vent./Bomba (1) – Opção com Controle PadrãoParâmetro 196 [Niv Aces Param] configurado na opção 4 “Vent./Bomba Avanç”.
(1)Somente disponível nos inversores com controle padrão e com a versão de firmware 3.001 ou superior.
Arquivo Grupo Parâmetros
Monitoração Medição Freq Saida 001Freq Comandada 002Corrente Saida 003Pot. de Saida 007MWh decorrido 009
Tempo funcionam. 010Tensão Barram CC 012Val. Ent. Anal 1 016Val. Ent. Anal 2 017
Controle do Motor
Dados do Motor Volts Mtr ID. 041Amps Mtr ID. 042
Hettz Mtr ID. 043RPM Mtr ID. 044
Potência Mtr ID. 045Unid Pot Mtr ID. 046
Atributos de Torque Modo Desemp. Trq 053Tensão Maxima 054
Freq. Maxima 055
Volts por Hertz Ref. Part./Acel 069Ref. Operacao 070
Tensão de Quebra 071Freq. de Quebra 072
Comando de Velocidade
Modo & Lim Veloc Modo Velocidade 080Veloc Minima 081Velocidade Max. 082
Limite Sobrevel 083Inibição Freq 1 084Inibição Freq 2 085
Inibição Freq 3 086Banda Inib freq 087
Referências de Velocidade
Sel Ref Veloc A 090Ref Super Vel A 091
Ref Infer Vel A 092 Sel Ref Veloc B 093
Ref Super Vel B 094Ref Infer Vel B 095
Velocidades Discretas
Vel Preset 2-4 102-104
Processo PI Config PI 124Controle do PI 125Sel Refer de PI 126Refer do PI 127Sel Feedback PI 128
Tempo Integr PI 129Ganho Prop PI 130Limite Inf PI 131Limite Sup de PI 132Pre-Carga do PI 133
Status do PI 134Medidor Refer PI 135Medidor Fdback PI 136Medidor Erro PI 137Medidor Saida PI 138
Controle Dinâmico
Taxas de Rampas Tempo Acelerac 1 140Tempo Acelerac 2 141
Tempo Desacele 1 142 Tempo Desacele 2 143
% Curva-S 146
Limites de Carga Val Limite Corr 148 Frequencia PMW 151
Modos de Parada/Frenagem
Modo Parada A 155
Modos de Reinicialização
Partida Energiz 168Partid Mov Ativ 169Ganho Part Movim 170Tentat Rein Auto 174
Temp entre tent 175Modo ativ-inativ 178Ref ativ- inativ 179Nív. ativ-inativ 180
Tempo ativo 181Nivelinativo 182Tempo inativo 183
Perda de potência Modo Perda Pot 184 Tempo Perda Pot 185
Utilitário Configuração de Direção
Modo Direcao 190
Config Ref HIM Grava Refer HIM 192 Pre-cargaREFMan 193
Memória do Inversor Niv Aces Param 196. Volta p/ Default 197 Idioma 201
Diagnósticos Inib Partida 214Status Ent Dig 216
Status Saida Dig 217
Entradas e Saídas
Entradas Analógicas Config Entr Anlg 320RaizQuad Ent Anl 321Entr Anlg Sup 1 322
Entr Anlg Sup 2 325Entr Anlg Inf 1 323Entr Anlg Inf 2 326
Perda EntAnlg 1 324Perda EntAnlg 2 327
Saídas Analógicas Conf Saída Analg 340Sel Saida Analg1 342
Saida Analg1 Sup 343Saida Analg1 Inf 344
Entradas Digitais Sel Entr Digit 1-6 361-366
Saídas Digitais Sel Saida Dig 1 380Sel Saida Dig 2 384Niv Saida Dig 1 381
Niv Saida Dig 2 385TempLigSaidDig 1 382TempLigSaidDig 2 386
TempDslSaidDig 1 383TempDslSaidDig 2 387
Monitoração
Controle do Motor
Comando de Velocidade
Controle Dinâmico
Utilitário
Entradas e Saídas

3-12 Programação e Parâmetros
Arquivo de Monitoração
Arq
uivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
MO
NITO
RAÇÃ
O
Med
ição
001 [Freq Saida]Freqüência de saída presente em T1, T2 e T3 (U, V & W)
Default:Mín/Máx:Unidades:
Leitura Somente–/+ [Freq. Maxima]0,1 Hz
002 [Freq Comandada]Valor do comando da freqüência ativa.
Default:Mín/Máx:Unidades:
Leitura Somente–/+ [Velocidade Max.]0,1 Hz
[Velocidade comandada] Valor de referência da velocidade/freqüência ativa. Exibido em Hz ou RPM, dependendo do valor das [Speed Units].
Default:Mín/Máx:Unidades:
Leitura Somente–/+ [Velocidade Max.]0,1 Hz0,1 RPM
079
003 [Corrente Saida]A corrente de saída total presente em T1, T2 e T3 (U, V & W)
Default:Mín/Máx:Unidades:
Leitura Somente0,0/Corrente Nominal Inversor × 20,1 Amps
004 [Corrente Torque]A quantidade de corrente que está em fase com o componente da tensão fundamental, baseada no motor.
Default:Mín/Máx:Unidades:
Leitura SomenteClassificação Inversor × –2/+20,1 Amps
005 [Corrente Fluxo]A quantidade de corrente que não está em fase com o componente da tensão fundamental.
Default:Mín/Máx:Unidades:
Leitura SomenteClassificação Inversor × –2/+20,1 Amps
006 [Tensão de Saida]Tensão de saída presente nos terminais T1, T2 e T3 (U, V & W).
Default:Mín/Máx:Unidades:
Leitura Somente0,0/Tensão nominal do inversor0,1 VCA
007 [Pot. de Saida]Potência de saída presente em T1, T2 e T3 (U, V & W).
Default:Mín/Máx:Unidades:
Leitura Somente0,0/kW Nominal Inversor × 20,1 kW
008 [Fator Pot. Saida]Fator de potência de saída.
Default:Mín/Máx:Unidades:
Leitura Somente0,00/1,000,01
009 [MWh decorrido]Energia de saída acumulada do inversor.
Default:Mín/Máx:Unidades:
Leitura Somente0,0/214748352,0 MWh0,1 MWh
010 [Tempo funcionam.]O tempo acumulado que o inversor está irradiando energia.
Default:Mín/Máx:Unidades:
Leitura Somente0,0/214748352,0 Hrs0,1 Hrs
Standard
Vector
32
32

Programação e Parâmetros 3-13
MO
NITO
RAÇÃ
O
Med
ição
011 [Freq MOP]Valor do sinal no MOP (Motor Operated Potentiometer - Potenciômetro Operado por Motor).
Default:Mín/Máx:Unidades:
Leitura Somente–/+ [Freq. Maxima]0,1 Hz
079
[Referência MOP]Veja a descrição acima.
Default:Mín/Máx:Unidades:
Leitura Somente–/+ [Velocidade Max.]0,1 Hz0,1 RPM
012 [Tensão Barram CC]Nível de tensão presente no barramento CC.
Default:Mín/Máx:
Unidades:
Leitura Somente0,0/Baseado na Classificação do Inversor0,1 VCC
013 [Mem. Barram CC]Média de 6 minutos do nível da tensão no barramento CC.
Default:Mín/Máx:
Unidades:
Leitura Somente0,0/Baseado na classificação do inversor0,1 VCC
014 [kWh consumido]Energia de saída acumulada do inversor.
Default:Mín/Máx:Unidades:
Leitura Somente0,0/429496729,5 kWh0,1 kWh
016017
[Val. Ent. Anal 1][Val. Ent. Anal 2]Valor do sinal nas entradas analógicas.
Default:Mín/Máx:
Unidades:
Leitura Somente0,000/20,000mA–/+10,000V0,001mA0,001 Volt
022 [Veloc. rampeada]Valor da velocidade comandada após a aplicação de Acel/Desacele e Curva-S.
Default:Mín/Máx:
Unidades:
Leitura Somente–/+400,0 Hz–/+24000,0 RPM0,1 Hz0,1 RPM
079
023 [Ref. velocidade]Valor da soma de velocidade rampeada, processo PI e queda. Quando o modo vetor FVC for selecionado, a queda não será adicionada.
Default:Mín/Máx:
Unidades:
Leitura Somente–/+400,0 Hz–/+24000,0 RPM0,1 Hz0,1 RPM
079
024 [Torque comandado]O valor de referência de torque final após a aplicação de limites e filtros. Porcentagem do torque nominal do motor.
Default:Mín/Máx:Unidades:
Leitura Somente–/+800,0%0,1%
053
025 [Feedback veloc.]Este parâmetro exibe o valor da velocidade do motor real, quer seja medida pelo feedback do encoder ou estimada.
Default:Mín/Máx:
Unidades:
Leitura Somente–/+400,0 Hz–/+24000,0 RPM0,1 Hz0,1 RPM
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Standard
Vector
Vector v3
Vector
Vector
FVVector
Vector

3-14 Programação e Parâmetros
Arquivo de Controle do Motor
MO
NITO
RAÇÃ
O
Dado
s do
Inve
rsor
026 [kW Nominal]Classificação da potência do inversor.
Default:Mín/Máx:Unidades:
Leitura Somente0,00/3000,00 kW0,01 kW
027 [Tensão NominalA classe da tensão de entrada do inversor (208, 240, 400, etc.).
Default:Mín/Máx:
Unidades:
Leitura Somente0,0/6553,5 VCA0,0/65535,0 VCA 0,1 VCA
028 [Corrente Nominal]A corrente nominal de saída do inversor.
Default:Mín/Máx:
Unidades:
Leitura Somente0,0/6553,5 Amps0,0/65535,0 Amps 0,1 Amps
029 [Versão SFW]Versão do software da Placa de Controle Principal.
Default:Mín/Máx:
Unidades:
Leitura Somente0,000/256,256 0,000/65535,000 0,001
196
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
32
Vector
Vector
Vector
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
CO
NTR
OLE
DO
MO
TOR
Dad
os d
o M
otor
040 [Tipo do Motor]Configurado para fazer a correspondência do motor conectado.(1) Importante: A seleção da opção 1 ou 2 requer também a seleção de “V/Hz Personalizado”, opção 2 no parâmetro 53.
Default:Opções:
0012
“Indução”“Indução”“Relut Sincr” (1)
“PM Sincr” (1)
053
041 [Volts Mtr ID.]Configurado na tensão nominal da placa de identificação do motor.
Default:
Mín/Máx:Unidades:
Baseado na classificação do inversor0,0/[Tensão Nominal]0,1 VCA
042 [Amps Mtr ID.]Configurado na corrente nominal plena (FLA) dos dados de identificação do motor.
Default:
Mín/Máx:Unidades:
Baseado na classificação do inversor0,0/[Corrente Nominal] × 20,1 Amps
047
048
043 [Hettz Mtr ID.]Configurado na freqüência nominal da placa de identificação do motor.
Default:Mín/Máx:Unidades:
Baseado no No. de Cat. do Inversor5,0/400,0 Hz0,1 Hz
044 [RPM Mtr ID.]Configurado no RPM nominal dos dados de identificação do motor.
Default:
Mín/Máx:
Unidades:
1750 RPM1750,0 RPM 60/2400 RPM60,0/24000,0 RPM 1 RPM1,0 RPM
Vector
Vector
Vector

Programação e Parâmetros 3-15
CON
TRO
LE D
O M
OTO
R Dado
s do
Mot
or
045 [Potência Mtr ID.]Configurado na potência nominal dos dados de identificação do motor.
Default:
Mín/Máx:Unidades:
Baseado na classificação do inversor0,00/100,000,00/1000,00 0,01 kW/HPConsulte [Unid Pot Mtr ID.]
046
046 [Unid Pot Mtr ID.]Seleciona as unidades de potência do motor a serem usadas.
Default:
Opções: 01
Baseado na classificação do inversor“Cavalo-vapor”“quilowatts”
[Unid Pot Mtr ID.]Seleciona as unidades de potência do motor a serem usadas.
“Converter em HP” = converte todas as unidades de potência em cavalo-vapor.“Converter em kW” = converte todas as unidades de potência em quilowatts.
Default:
Opções: 0123
Baseado na classificação do inversor“Cavalo-vapor”“quilowatts”“Converter em HP”“Converter em kW”
047 [Tipo Sobrec Mtr]Seleciona a freqüência de saída abaixo da qual a corrente de operação do motor será reduzida. A sobrecarga térmica do motor vai gerar uma falha em níveis de corrente inferiores.
Default:Mín/Máx:Unidades:
Freqüência Nominal/30,0/Freqüência Nominal0,1 Hz
042
220
048 [Fator sobrec mtr]Configura o nível de operação para a sobrecarga do motor.
Default:Mín/Máx:Unidades:
1,000,20/2,000,01
042
220
049 [Polos motor]Define o número de pólos no motor.
Default:Mín/Máx:Unidades:
42/401 pólo
Atri
buto
s de
torq
ue
053 [Modo Desemp. Trq]Configura o método de produção do torque do motor.
Default:Opções:
00123
“Vetor Sens”“Vetor Sens”“Economizar VS”“V/Hz Person.”“V/Hz Vent./Bomba”
[Sel Contr Motor]Configura o método de controle do motor usado no inversor.
Importante: O modo “Vetor FVC” requer auto-ajuste do motor, acoplado ou não à carga.
Default:Opções:
001234
“Vetor Sens”“Vetor Sens”“Economizar VS”“V/Hz Person.”“V/Hz Vent./Bomba”“Vetor FVC”
054 [Tensão Maxima]Configura a tensão mais elevada que o inversor produzirá.
Default:Mín/Máx:
Unidades:
Tensão Nominal do InversorTensão Nominal x 0,25/Tensão Nominal0,1 VCA
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
32 Vector
Standard
Vector
MotorFLA
SobrecargaFator
Nível de Operação=x
Vector
Standard
Vector

3-16 Programação e Parâmetros
CONTRO
LE D
O M
OTO
R
Atrib
utos
de
Torq
ue
055 [Freq. Maxima]Configura a freqüência mais elevada que o inversor produzirá. Consulte o parâmetro 083, [Limit Sobrev].
Default:Mín/Máx:Unidades:
110,0 ou 130,0 Hz5,0/420,0 Hz0,1 Hz
083
056 [Compensacao]Ativa/desativa as opções de correção.
Descrições das opções
Onda Reflet Desativa a proteção de sobretensão de onda refletida para cabos longos. (tipicamente ativada).
Ativar Jerk (Arranco) Em outros modos, além do Vetor FVC, a desativação do arranco remove uma curva S curta no início da rampa de aceleração/desaceleração.
AutoCalc Ixo Não está em funcionamento – reservado para aprimoramentos futuros.
Diag Trans Desativa os testes de diagnóstico de energia do transistor que são executados em cada comando de partida.
Adaptador Rs FVC c/Encoder somente – A desativação poderá melhorar a regulagem de torque em velocidades mais baixas (em geral não é necessário).
Inv Fios Mtr Inverte a rotação de fase da tensão aplicada; inversão efetiva dos cabos do motor.
Bloq Freq PWM Evita que a freqüência PWM reduza a 2 kHz em operações de baixas freqüências no modo Vetor FVC sem encoder.
057 [Modo Fluxo]Auto = O fluxo é estabelecido pelo período de tempo calculado com base nos dados de identificação do motor. [Tempo Fluxo] não é usado.
Manual = O fluxo é estabelecido para [Tempo Fluxo] antes da aceleração.
Default:Opções:
001
“Manual”“Manual”“Automático”
053
058
058 [Tempo Fluxo]Configura a quantidade de tempo que o inversor usará para tentar e atingir o fluxo total do estator do motor. Quando um comando de Partida for emitido, a corrente CC no nível de limite da corrente é usada para estabelecer o fluxo do estator antes da aceleração.
Default:
Mín/Máx:
Unidades:
0,00 Seg0,0 Seg 0,00/5,00 Segs0,0/5,0 Segs 0,000/5,000 Segs 0,01 Seg0,1 Seg 0,001 Seg
053
058
059 [Filtro boost SV]Configura a quantidade de filtragem usada para reforçar a tensão durante a operação do vetor sensorless e vetor FVC (sem encoder).
Default:Mín/Máx:Unidades:
5000/327671
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
101 110x1xxxxxxxx10 01234567891112131415
1=Ativado0=Desativadox =Reservado
No. BitValores de Fábrica dos Bits
(1) (2)(3)
(4) (5)
Para o limite de corrente (exceto no modo de vetor FVC).Somente com a opção de controle padrão.Somente com a opção de controle vetorial.Firmware de vetor 2.003 e posteriores.Firmware de vetor 3.001 e posteriores.
Onda R
eflet
Ativa
r arra
nco (
1)
Auto
Calc
Ixo (
2)
Diag
Tran
s (3
)
Adap
t RS
Inv F
ios M
tr (4
)
Bloq
Freq
PW
M (5)
Vector
Vector
v3
Vector
v3

Programação e Parâmetros 3-17
CONT
ROLE
DO
MO
TOR
Atrib
utos
de
Torq
ue
061 [Auto-ajuste]Proporciona um método manual ou automático para configurar a [Queda tensão RI], [Refer.Corr.Fluxo] e [Queda tens indut]. Usado somente quando o parâmetro 53 estiver configurado em “Vetor Sensorless”, “Economizar VS” ou “Vetor FVC”.
Default:Opções:
30123
“Calcular”“Pronto”“Ajuste Estático”“Ajuste Rotação”“Calcular”
053
062
“Pronto” (0) = parâmetro retorna a esta configuração seguido de um “Ajuste Estático” ou “Ajuste de Rotação”. Também permite configurar manualmente a [Queda tensão RI], [Queda tens indut] e [Refer.Corr.Fluxo].
“Ajuste Estático” (1) = Um comando temporário que inicia um teste não rotacional da resistência do estator do motor para a melhor configuração automática possível da [Queda tensão RI] em todos os modos válidos e um teste da indutância de dispersão do motor não rotacional para a melhor configuração automática da [Queda tens indut] no modo “Vetor FVC”. Após o início dessa configuração, é necessário um comando de partida. O parâmetro retorna a “Pronto” (0) após o teste, quando então uma outra transição de partida é necessária para operar o inversor no modo normal. Usado quando o motor não pode ser girado.
“Ajuste de Rotação” (2) = Um comando temporário que inicia um “Ajuste Estático” seguido de um teste rotacional para a melhor configuração automática possível da [Refer.Corr.Fluxo]. No modo “Vetor FVC”, com feedback do encoder, é também executado um teste para a melhor configuração automática do [Escorr RPM @ I.nom]. Após o início dessa configuração, é necessário um comando de partida. O parâmetro retorna a “Pronto” (0) após o teste, quando então uma outra transição de partida é necessária para operar o inversor no modo normal. Importante: Usado quando o motor estiver desacoplado da carga. Os resultados podem não ser válidos se uma carga estiver acoplada ao motor durante este procedimento.
“Calcular” (3) = Esta configuração usa os dados de identificação do motor para configurar automaticamente a [Queda tensão RI], [Queda tens indut], [Refer.Corr.Fluxo] e [Escorr RPM @ I.nom].
062 [Queda tensão RI]Valor da queda de tensão ao longo da resistência do estator do motor na corrente nominal do motor. Usado somente quando o parâmetro 53 for configurado em “Vetor Sensorless”, “Economizar VS” ou “Vetor FVC”.
Default:
Mín/Máx:
Unidades:
Baseado na classificação do inversor0,0/[Tensão Nominal do Motor]×0,250,1 VCA
053
061
063 [Refer.Corr.Fluxo]Valor da corrente para fluxo total do motor. Usado somente quando o parâmetro 53 for configurado em “Vetor Sensorless”, “Economizar VS” ou “Vetor FVC”.
Default:
Mín/Máx:
Unidades:
Baseado na classificação do inversor0,00/[Corrente Nominal Plena do Motor]0,01 Amps
053
061
064 [Queda tens indut]Valor da queda de tensão ao longo indutância de dispersão do motor na corrente nominal do motor. Usado somente quando o parâmetro 53 for configurado em “Vetor Sensorless”, “Economizar VS” ou “Vetor FVC”.
Default:
Mín/Máx:Unidades:
Baseado na classificação do inversor0,0/230,0, 480,0, 575 VCA0,1 VCA
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
!ATENÇÃO: Poderá ocorrer uma rotação do motor no sentido indesejado durante este procedimento. Para proteger contra possíveis lesões e/ou danos no equipamento, recomenda-se desconectar o motor da carga antes de proceder.
32

3-18 Programação e Parâmetros
CONTRO
LE D
O M
OTO
R
Atr
ibut
os d
e To
rque
066 [Auto-ajuste trq]Especifica o torque aplicado ao motor durante os testes de inércia e corrente de fluxo realizados durante um auto-ajuste.
Default:Mín/Máx:Unidades:
50,0%0,0/150,0%0,1%
053
067 [Auto-ajust inérc]Fornece um método automático de ajuste da [Inércia Total]. Este teste é executado automaticamente durante os testes de energização do motor. Importante: Usado quando o motor estiver acoplado à carga. Os resultados podem não ser válidos se a carga não estiver acoplada ao motor durante este procedimento.
“Pronto” = parâmetro retorna a esta configuração após a conclusão de ajuste de inércia.
“Ajuste de Inércia”= um comando temporário que dá início ao teste de inércia do conjunto motor/carga. O motor rampeará para cima e para baixo enquanto o inversor mede a quantidade de inércia.
Default:Opções:
001
“Pronto”“Pronto”“Ajuste de Inércia”
053450
427431
[Ref Torque A] [Ref Torque B]
Seleciona a fonte de referência de torque externa para o inversor. A maneira como esta referência é utilizada depende do [Speed/Torque Mod].(1)Consulte o Apêndice B quanto às localizações das portas DPI.(2) Firmware de vetor versão 3.001 e posteriores.
Default:
Opções:
1240
123-1718-22232425-2829
“Pto ajuste torque”“Desativado”“Pto ajuste torque”“Pto ajuste torque1”(2)
“Ent. Analóg. 1”“Ent. Analóg. 2”“Reservado”“Porta DPI 1-5” (1)
“Reservado”“Desativado”“Bloco de Escala 1-4”(2)
“Pto ajuste torque2”(2)
053
428432
[Ref Sup Trq A][Ref Sup Torque B]
Gradua o valor superior da seleção da [Ref Torque A] quando a fonte for uma entrada analógica.
Default:
Mín/Máx:Unidades:
100,0%100,0%–/+800,0%0,1%
053
429433
[Ref Inf Trq A][Ref Inf Torque B]
Gradua o valor inferior da seleção da [Ref Torque A] quando a fonte for uma entrada analógica.
Default:
Mín/Máx:Unidades:
0,0%0,0%–/+800,0%0,1%
053
430 [Div Ref Torque A]Define o valor do divisor para a seleção da [Ref Torque A].
Default:Mín/Máx:Unidades:
1,00,1/3276,70,1
053
434 [Mult Ref Trq B]Define o valor do mutilplicador para a seleção da [Sel Ref Torque B].
Default:Mín/Máx:Unidades:
1,0–/+32767,00,1
053
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
FV
Vector
FV
Vector
FV
Vector
Vector
FV
Vector
Vector
FV
Vector
Vector
FVVector
FVVector

Programação e Parâmetros 3-19
CONT
ROLE
DO
MO
TOR
Atr
ibut
os d
e To
rque
435 [Pto ajuste trq][Pto ajuste trq 1]
Fornece um valor fixo interno para o Ponto de Ajuste de Torque quando [Sel Refer Torque] estiver configurado em “Pto Ajuste Torque”.
Default:Mín/Máx:Unidades:
0,0%–/+800,0%0,1%
053
436 [Limite Trq Pos]Define o limite de torque para o valor de referência de torque positivo. A referência não poderá ultrapassar este valor.
Default:Mín/Máx:Unidades:
200,0%0,0/800,0%0,1%
053
437 [Limite Trq Neg]Define o limite de torque para o valor de referência de torque negativo. A referência não poderá ultrapassar este valor.
Default:Mín/Máx:Unidades:
–200,0%–800,0/0,0%0,1%
053
438 [Pto ajuste trq 2]Fornece um valor fixo interno para o Ponto de Ajuste de Torque quando [Sel Refer Torque] estiver configurada em “Pto Ajuste Torque2”.
Default:Mín/Máx:Unidades:
0,0%–/+800,0%0,1%
440 [Status controle]Exibe o status resumido de qualquer condição que possa estar limitando a referência de torque ou corrente.
Leitura Somente 053
441 [Ref. Corr. Trq]Exibe o valor de referência da corrente de torque presente na saída do limitador da taxa de corrente (parâmetro 154).
Default:Mín/Máx:Unidades:
Leitura Somente–/+32767,0 Amps0,01 Amps
053
Vol
ts p
or H
ertz
069 [Ref. Part./Acel]Configura o nível de reforço de tensão para partida e aceleração quando o modo “V/Hz Person.” for selecionado. Consulte o parâmetro 083 [Limit Sobrev].
Default:
Mín/Máx:
Unidades:
Baseado na classificação do inversor0,0/[Tensão Nominal do Motor] x 0,250,1 VCA
053
070
070 [Ref. Operacao]Configura o nível de reforço para o nível estável ou desaceleração quando os modos “V/Hz Vent./Bomba” ou “V/Hz Personalizado” forem selecionados. Consulte o parâmetro 083 [Limit Sobrev].
Default:
Mín/Máx:
Unidades:
Baseado na classificação do inversor0,0/[Tensão Nominal do Motor] x 0,250,1 VCA
053
069
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
FV
Vector
Vector v3
FV
Vector
FV
Vector
FVVector v3
FVVector
000 000000000000010 01234567891112131415
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
Lim
CorN
egTr
q
Lim
CorP
osTr
q
Lim
CorN
egFl
x
Lim
CorP
osFl
x
Lim
TrqN
eg
Lim
TrqP
os
Lim
TrqP
otNe
g
Lim
TrqP
otPo
s
Lim
Esc
orr M
ín
Lim
Esc
orr M
áx.
Lim
CorT
rqMin
RefV
elTrq
RefTo
rq
Stat
EnfC
ampo
Stat
Obs
erv.
Disp
Lim
Tens
000 00xxxxxxxxxxx26 161718192021222324252728293031
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
EstL
imTe
ns
Lim
Tens
Inv
Fren
Flux
o
Econ
omiza
r
MotFa
seRe
v
FVVector

3-20 Programação e Parâmetros
CONTRO
LE D
O M
OTO
R
Volts
por
Her
tz 071 [Tensão de Quebra]Configura a tensão que o inversor produzirá na [Freq. de Quebra]. Consulte o parâmetro 083 [Limit Sobrev].
Default:Mín/Máx:Unidades:
[Tensão Nominal do Motor] × 0,250,0/[Tensão Nominal do Motor]0,1 VCA
053
072
072 [Freq. de Quebra]Configura a tensão que o inversor produzirá na [Tensão de Quebra]. Consulte o parâmetro 083.
Default:Mín/Máx:Unidades:
[Freqüência Nominal] × 0,250,0/[Freq. Maxima]0,1 Hz
053
071
Feed
back
de
velo
cida
de
412 [Tipo Fdbk motor]Seleciona o tipo de encoder; quadratura ou canal simples. As opções 1 e 3 detectam uma perda de sinal do encoder (ao utilizar entradas diferenciais), independentemente da configuração do parâmetro 080 [Sel Feedback]. Para modo Vetor FVC, use somente um encoder de quadratura (opção 0/1). Se for utilizado um encoder de canal único (opção 2/3) no modo vetor sensorless ou V/Hz, selecione “Desativar Reverso” (opção 2) no parâmetro 190.
Default:Opções:
00123
“Quadratura”“Quadratura”“Verif quad”“Can. simples”“Verificação simples”
413 [PPR Encoder]Contém os pulsos por revolução do encoder. Para uma melhor operação no modo Vetor FVC, o PPR deverá ser ≥ (64 x pólos do motor).
Default:Mín/Máx:Unidades:
1024 PPR2/20000 PPR1 PPR
414 [Feedback Pos Enc]Exibe a contagem bruta de pulsos do encoder. No caso de encoders de canal simples esta contagem aumentará (por revolução) pela quantidade em [PPR Encoder]. No caso de encoders de quadratura esta contagem aumentará aproximadamente 4 vezes a quantidade definida em [PPR Encoder].
Default:Mín/Máx:Unidades:
Leitura Somente–/+21474836471
415 [Veloc. Encoder]Fornece um ponto de monitoração que reflete a velocidade como é percebida no dispositivo de feedback.
Default:Mín/Máx:
Unidades:
Leitura Somente–/+420,0 Hz–/+25200,0 RPM0,1 Hz0,1 RPM
079
416 [Sel Filtro Fdbk]Seleciona o tipo de filtro de feedback desejado. “Leve” usa um filtro de feedback de 35/49 radiano. “Pesado” usa um filtro de feedback de 20/40 radiano.
Default:Opções:
0012
“Nenhum”“Nenhum”“Leve”“Pesado”
419 [Freq Filtro Ent.]Estabelece a freqüência central para um filtro de entalhe de 2-pólos opcional. O filtro é aplicado ao comando de torque. “0” desativa esse filtro.
Default:Mín/Máx:Unidades:
0,0 Hz0,0/500,0 Hz0,1 Hz
053
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
Vector
Vector
Vector
Vector
FVVector

Programação e Parâmetros 3-21
Arquivo do Comando de Velocidade
CONT
ROLE
DO
MO
TOR
Feed
back
de
velo
cida
de
420 [K Filtro Entalhe]Ajusta o ganho para o filtro de entalhe de 2-pólos.
Default:Mín/Máx:Unidades:
0,3 Hz0,1/0,9 Hz0,1 Hz
053
421 [Pulso Marcador]Mantém a contagem bruta do encoder em cada pulso marcador.
Default:Mín/Máx:Unidades:
Leitura Somente–/+21474836471
422 [Escala Ent Pulso]Ajusta a escala fator/ganho para a Entrada de Pulso quando o P423 for configurado em “Entrada de Pulso”. Calcule para velocidade desejada da seguinte maneira:
Default:Mín/Máx:Unidades:
642/200001
423 [Canal Z Encoder]Define se a entrada conectada aos terminais 5 e 6 do Bloco de Terminal do Encoder será usada como entrada de pulso ou de marcador. As opções 1 e 3 detectam uma perda de sinal (ao utilizar entradas diferenciais), independentemente da configuração do parâmetro 080 [Sel Feedback].
Default:Opções:
00123
“Entrada Pulso”“Entrada Pulso”“Verif. pulso”“Entrada marcador”“Verif. marcador”
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
FV
Vector
Vector
Vector
Razão de pulso de entrada (Hz)Cmd. desejado (Hz)
Razão de pulso de entrada (Hz)Cmd. desejado (RPM) x
120[Pólos motor]
para Hz, [Escala Ent Pulso] =
para RPM, [Escala Ent Pulso] =
Vector
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
COM
ANDO
DE
VELO
CIDA
DE
Mod
o &
Lim
Vel
oc
079 [Speed Units]Seleciona as unidades a serem usadas para todos os parâmetros relacionados com a velocidade. As opções 0 e 1 indicam somente o status. As opções 2 e 3 converterão/configurarão o inversor para esta seleção.
“Converter em Hz” (2) – coverte todos os parâmetros baseados na velocidade em Hz, e muda o valor proporcionalmente (por exemplo 1800 RPM = 60 Hz).
“Converter em RPM” (3) – coverte todos os parâmetros baseados na velocidade em RPM, e muda o valor proporcionalmente.
Default:Opções:
00123
“Hz”“Hz”“RPM”“Converter em Hz”“Converter em RPM”
Vector

3-22 Programação e Parâmetros
COMAN
DO D
E VE
LOCI
DADE
Mod
o &
Lim
Vel
oc
080 [Modo Velocidade]Configura o método de regulação de velocidade.
Default:Opções:
001
2
“Loop Aberto”“Loop Aberto”“Compensação de Escorregamento”“Processo PI”
412152
[Sel Feedback]Seleciona a fonte para o feedback de velocidade do motor. Observe que todas as seleções estão disponíveis ao usar o Processo PI.
“Loop aberto” (0) – não há nenhum encoder e a compensação de escorregamento não é necessária.
“Compensação de escorregamento” (1) – é necessário um controle rígido da velocidade e o encoder não está presente.
“Encoder” (3) – há um enconder presente.
“Simulador” (5) – simula um motor para testar a operação do inversor e verificação de interface.
Default:Opções:
001
2345
“Loop Aberto”“Loop Aberto”“Compensação de Escorregamento”“Reservado”“Encoder”“Reservado”“Simulador”
081 [Veloc Minima]Configura o limite inferior para a referência de velocidade após a aplicação da escala. Consulte o parâmetro 083 [Limit Sobrev].
Default:Mín/Máx:Unidades:
0,00,0/[Velocidade Max.]0,1 Hz0,1 RPM
079083092095
082 [Velocidade Max.]Configura o limite superior para a referência de velocidade após a aplicação da escala. Consulte o parâmetro 083 [Limit Sobrev].
Default:
Mín/Máx:
Unidades:
50,0 ou 60,0 Hz (classe de tensão)[RPM Mtr ID.]5,0/400,0 Hz75,0/24000,0 RPM 0,1 Hz0,1 RPM
055079083091094202
083 [Limite Sobrevel]Configura a quantidade de incremento da freqüência de saída (acima da [Velocidade Max.]) permissível para funções como a compensação de escorregamento.
A [Velocidade Max.] + [Limite Sobrevl] deve ser ≤ [Freq Máxima]
Default:
Mín/Máx:
Unidades:
10,0 Hz300,0 RPM 0,0/20,0 Hz0,0/600,0 RPM 0,1 Hz0,1 RPM
055079082
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Standard
Vector
Vector
Vector
Vector
Vector
Vector
Vector
Faixa de Freqüência de Saída Permitida Regulação de Barramento ou Limite de Corrente
Tens
ão d
e Sa
ída
Freqüência
Faixa de Freqüência de Saída PermitidaOperação Normal
Faixa de Referência de Velocidade Permitida
Ajuste de Freqüência devido ao Modo de Controle de Velocidade
TensãoMáxima
TensãoNominal
Tensão deInterrupção
Reforço de Partida (Boost)
Reforço Operação (Boost)
0 Velocidademínima
Freqüência Nominal VelocidadeMáxima
Limite de Frequência
de Saída
FreqüênciaMáxima
Freq. deInterrupção
Limite deSobrevelocidade

Programação e Parâmetros 3-23
COM
ANDO
DE
VELO
CIDA
DE
Mod
o &
Lim
Vel
oc
084085086
[Inibição Freq 1][Inibição Freq 2][Inibição Freq 3]Configura a freqüência na qual o inversor não operará. A [Inibição Freq 1-3] e [Banda Inibição Freq] não devem ser igual a 0,
Default:Default:Default:Mín/Máx:Unidades:
0,0 Hz0,0 Hz0,0 Hz–/+[Velocidade Max.]0,1 Hz
087
087 [Banda Inib freq]Determina uma largura de banda em torno da inibição de freqüência. A [Banda Inib freq] é dividida aplicando-se metade acima e metade abaixo da inibição de freqüência efetiva. A mesma largura de banda se aplica a todas freqüências de inibição.
Default:Mín/Máx:Unidades:
0,0 Hz0,0/30,0 Hz0,1 Hz
084 085 086
088 [Speed/Torque Mod]Seleciona a fonte de referência do torque.
“Torque Zero” (0) – comando de torque = 0,
“Reg Velocidade” (1) – o inversor opera como um regulador de velocidade.
“Reg Torque” (2) – uma referência de torque externa é usada para o comando de torque.
Default:Opções:
10123456
“Reg Velocidade”“Torque zero”“Reg Velocidade”“Reg Torque”“Torq/Vel Mín.”“Torq/Vel Máx.”“Soma Torq/Vel.”“Mín. Absoluto”
053
“Torq/Vel Mín” (3) – seleciona o menor valor algébrico a ser regulado quando são comparados a referência de torque e o torque gerado pelo regulador de velocidade.
“Torq/Vel Máx” (4) – seleciona o maior valor algébrico quando são comparados a referência de torque e o torque gerado pelo regulador de velocidade.
“Soma Torq/Vel” (5) – seleciona a soma da referência de torque e o torque gerado pelo regulador de velocidade.
“Absoluto” (6) – seleciona o menor valor algébrico absoluto a ser regulado quando são comparados a referência de torque e o torque gerado pelo regulador de velocidade.
454 [Limite veloc rev]Estabelece um limite da velocidade no sentido negativo, quando no modo Vetor FVC. Usado somente no modo bipolar. O valor zero desativa este parâmetro e usa [Velocidade Max.] para o limite de velocidade reversa.
Default:Mín/Máx:
Unidades:
0,0 RPM–[Velocidade Max.]/0,0 Hz–[Velocidade Max.]/0,0 RPM0,0 Hz0,0 RPM
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
FVVector
FVVector

3-24 Programação e Parâmetros
COMAN
DO D
E VE
LOCI
DADE
Refe
rênc
ia d
e ve
loci
dade
090 [Sel Ref Veloc A]Seleciona a fonte de referência da velocidade para o inversor, exceto se [Sel Ref Veloc B] ou [Veloc Pre-Progr 1-7] for selecionado.
(1) Consulte o Apêndice B quanto às localizações das portas DPI.
(2) Firmware de vetor versão 3.001 e posteriores.
Default:Opções:
2123-67891011121314151617181920212223-2425262728
“Ent. Analóg. 2”“Ent. Analóg. 1”“Ent. Analóg. 2”“Reservado”“Entr. Pulso”“Encoder”“Nível MOP”“Reservado”“Vel Prprog1”“Vel Prprog2”“Vel Prprog3”“Vel Prprog4”“Vel Prprog5”“Vel Prprog6”“Vel Prprog7”“Porta DPI 1”(1)
“Porta DPI 2”(1)
“Porta DPI 3”(1)
“Porta DPI 4”(1)
“Porta DPI 5”(1)
“Reservado”“Bloco de Escala1”(2)
“Bloco de Escala2”(2)
“Bloco de Escala3”(2)
“Bloco de Escala4”(2)
002091a093101a107117a120192a194213272273320361a366
091 [Ref Super Vel A] Gradua o valor superior da seleção da [Sel Ref Veloc A] quando a fonte for uma entrada analógica.
Default:Mín/Máx:Unidades:
[Velocidade Max.]–/+[Velocidade Max.]0,1 Hz0,01 RPM
079082
092 [Ref Infer Vel A] Gradua o valor inferior da seleção da [Sel Ref Veloc A] quando a fonte for uma entrada analógica.
Default:Mín/Máx:Unidades:
0,0–/+[Velocidade Max.]0,1 Hz0,01 RPM
079081
093 [Sel Ref Veloc B]Consulte a [Sel Ref Veloc A].
Default:Opções:
11 “Vel Prprog1”Consulte [Sel Ref Veloc A]
Veja090
094 [Ref Super Vel B]Gradua o valor superior da seleção da [Sel Ref Veloc B] quando a fonte for uma entrada analógica.
Default:Mín/Máx:Unidades:
[Velocidade Max.]–/+[Velocidade Max.]0,1 Hz0,01 RPM
079093
095 [Ref Infer Vel B]Gradua o valor inferior da seleção da [Sel Ref Veloc B] quando a fonte for uma entrada analógica.
Default:Mín/Máx:Unidades:
0,0–/+[Velocidade Max.]0,1 Hz0,01 RPM
079090093
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
Vector
Vector
Vector

Programação e Parâmetros 3-25
CO
MA
ND
O D
E VE
LOC
IDA
DE
Refe
rênc
ia d
e ve
loci
dade
096 [Sel Ref Man BT]Configura a fonte de referência da velocidade manual quando uma entrada digital for configurada para “Auto/Manual”.(1) “Ent. Analóg. 2” não é uma seleção válida caso
tenha sido selecionada para qualquer um dos seguintes:- [Selec Ent Ajuste]- [Sel Feedback PI]- [Sel Refer de PI]- [Sel Limite Corr]- [Ref ativ- inativ]
Default:Opções:
1123-89
“Ent. Analóg. 1”“Ent. Analóg. 1”“Ent. Analóg. 2” (1)
“Reservado”“Nível MOP”
097098
097 [Ref Super Man BT]Gradua o valor superior da seleção da [Sel Ref Man BT] quando a fonte for uma entrada analógica.
Default:Mín/Máx:Unidades:
[Velocidade Max.]–/+[Velocidade Max.]0,1 Hz0,01 RPM
079096
098 [Ref Infer Man BT]Gradua o valor inferior da seleção da [Sel Ref Man BT] quando a fonte for uma entrada analógica.
Default:Mín/Máx:Unidades:
0,0–/+[Velocidade Max.]0,1 Hz0,01 RPM
079096
099 [Ref. ent. pulso]Exibe o valor da entrada de pulso conforme visto nos terminais 5 e 6 do Bloco de Terminais do Encoder, se o [Canal Z Encoder], parâmetro 423, for configurado em “Entrada de Pulso”.
Default:Mín/Máx:
Unidades:
Leitura Somente–/+420,0 Hz–/+25200,0 RPM0,1 Hz0,1 RPM
Vel
ocid
ades
Dis
cret
as
100 [Veloc. de Jog]Configura a freqüência de saída quando um comando de jog for emitido.
Default:Mín/Máx:Unidades:
10,0 Hz–/+[Velocidade Max.]0,1 Hz
079
[Veloc. de Jog 1]Configura a freqüência de saída quando a Velocidade de Jog 1 for selecionada.
Default:
Mín/Máx:Unidades:
10,0 Hz300,0 RPM–/+[Velocidade Max.]0,1 Hz1 RPM
101102103104105106107
[Vel Preset 1][Vel Preset 2][Vel Preset 3][Vel Preset 4][Vel Preset 5][Vel Preset 6][Vel Preset 7]Fornece um valor fixo de comando de velocidade interna. No modo bipolar o sentido é comandando pelo sinal da referência.
Default:
Mín/Máx:Unidades:
5,0 Hz/150 RPM 10,0 Hz/300 RPM 20,0 Hz/600 RPM 30,0 Hz/900 RPM 40,0 Hz/1200 RPM 50,0 Hz/1500 RPM 60,0 Hz/1800 RPM –/+[Velocidade Max.]0,1 Hz1 RPM
079090093
108 [Veloc. de Jog 2]Configura a freqüência de saída quando a Velocidade de Jog 2 for selecionada.
Default:
Mín/Máx:Unidades:
10,0 Hz300,0 RPM–/+[Velocidade Max.]0,1 Hz1 RPM
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
Vector
Vector
Standard
Vector
Vector
Vector
Vector
Vector
Vector
Vector
Vector
Vector
Vector

3-26 Programação e Parâmetros
COMAN
DO D
E VE
LOCI
DADE
Aju
ste
Velo
cida
de
116 [Refer % Ajuste]Adiciona ou subtrai uma porcentagem da referência de velocidade ou velocidade máxima. Depende da configuração do parâmetro 118 [Sel Said Ajuste].
Default:Mín/Máx:Unidades:
0,0%–/+200,0%0,1%
118
117 [Selec Ent Ajuste]Especifica o sinal de entrada analógica que está sendo usado como uma entrada ajuste.
Default:Opções:
2 “Ent. Analóg. 2”Consulte [Sel Ref Veloc A]
090
093
118 [Sel Said Ajuste]Especifica as referências de velocidade que devem ser ajustadas.
117
119
120
119 [Ajuste Superior]Gradua o valor superior da seleção da [Selec Ent Ajuste] quando a fonte for uma entrada analógica.
Default:Mín/Máx:Unidades:
60,0 Hz–/+[Velocidade Max.]0,1 Hz1 RPM/%
079082117
120 [Ajuste Inferior]Gradua o valor inferior da seleção da [Selec Ent Ajuste] quando a fonte for uma entrada analógica.
Default:Mín/Máx:Unidades:
0,0 Hz–/+[Velocidade Max.]0,1 Hz1 RPM/%
079117
Com
pens
ação
de
Esco
rreg
amen
to
Importante: Os parâmetros no Grupo de Compensação de Escorregamento são usados para ativar e ajustar o Regulador de Compensação de Escorregamento. Para que o regulador possa controlar a operação do inversor, o parâmetro 080 [Modo de Velocidade] deve estar configurado em 1, “Comp Escorregamento”.
121 [Escor RPM@ I.nom]Configura a quantidade de compensação para a saída do inversor na FLA (Full Load Amp - Corrente de Carga Plena) do motor.
Se o valor do parâmetro 061 [Auto-ajuste] = 3 “Calcular” as mudanças feitas nesse parâmetro não serão aceitas.
O valor pode ser mudado pelo [Auto-ajuste] quando for selecionado “Encoder” no parâmetro 080 [Sel Feedback].
Default:
Mín/Máx:Unidades:
Baseado na [RPM Mtr ID.]0,0/1200,0 RPM0,1 RPM
061080122123
122 [Ganho Comp. Esc.]Configura do tempo de resposta da compensação de escorregamento.
Default:Mín/Máx:Unidades:
40,01,0/100,00,1
080121122
123 [Medid RPM Escorr]Exibe a quantidade atual de ajuste que está sendo aplicada como compensação de escorregamento.
Default:Mín/Máx:Unidades:
Leitura Somente–/+300,0 RPM0,1 RPM
080121122
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector v3
00x 0xxxxxxxxxxxx10 01234567891112131415
1=Ajustado/%0=Não Ajustado/Adicionarx =Reservado
No. BitValores de Fábrica dos Bits
Ref A
just
e A
Ref A
just
e B
Adici
onar
ou
% *
* Firmware de vetor 3.001 e posteriores
Vector
Vector

Programação e Parâmetros 3-27
COM
ANDO
DE
VELO
CIDA
DE
Pro
cess
o PI
Importante: Os parâmetros no Grupo de Processo PI são usados para ativar e ajustar o Loop de PI. Para que o loop de PI controle a operação do inversor, programe o seguinte:
Opção com controle padrão – o parâmetro 080 [Modo de Velocidade] deve estar configurado em 2 “Processo PI” e o parâmetro 125, bit 0, deve estar configurado em “1, Ativado”.
Opção com controle vetorial – requer somente a configuração do parâmetro 125, bit 0, em “1, Ativado”.
124 [Config PI]Estabelece a configuração do regulador PI.
124a138
125 [Controle do PI]Controla o regulador PI.
080
126 [Sel Refer de PI]Estabelece a fonte de referência de PI.(1) Firmware de vetor versão 3.001 e posteriores.
Default:Opções:
00123-67891011-1718-2223-2425262728
“Refer do PI”“Refer do PI”“Ent. Analóg. 1”“Ent. Analóg. 2”“Reservado”“Entr. Pulso”“Encoder”“Nível MOP”“Ref Mestre”“Vel Prprog1-7”“Porta DPI 1-5”“Reservado”“Bloco de Escala 1” (1)
“Bloco de Escala 2” (1)
“Bloco de Escala 3” (1)
“Bloco de Escala 4” (1)
024124a138
127 [Refer do PI]Fornece um valor fixo interno para referência do processo quando [Sel Refer de PI] for configurado em “Refer do PI”
Default:Mín/Máx:
Unidades:
50,00%–/+100,00% do Valor Máximo do Processo0,01%
124a138
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
000 0000000xxxxxx10 01234567891112131415
1=Ativado0=Desativadox =Reservado
No. Bit * Somente na opção de controle vetorial** Firmware com vetor 3.001 e posterioresValores de Fábrica dos Bits
% d
e Ref
**
Modo
Excl
Erro
Inve
rsão
Modo
Pré-
carg
a
Ref R
ampa
Fixa
ção
Zero
Reali
m R
aiz Q
uad
Modo
de P
arad
a
Anti-
bobi
nar
Ajus
te d
e Tor
que *
00x 0xxxxxxxxxxxx10 01234567891112131415
1=Ativado0=Desativadox =Reservado
No. BitValores de Fábrica dos Bits
Ativa
r PI
Mante
r PI
Rese
t PI

3-28 Programação e Parâmetros
COM
AN
DO
DE
VELO
CID
AD
E
Proc
esso
PI
128 [Sel Feedback PI]Seleciona a fonte de feedback de PI.
Default:Opções:
2 “Ent. Analóg. 2”Consulte a [Sel Refer de PI].
124a138
129 [Tempo Integr PI]Tempo necessário para o componente integral alcançar 100% do [Medidor Erro PI]. Não funciona quando o bit Manter PI de [Controle do PI] = “1” (ativado).
Default:Mín/Máx:Unidades:
2,00 Segs0,00/100,00 Segs0,01 Seg
124a138
130 [Ganho Prop PI]Estabelece o valor para o componente proporcional de PI.Erro PI x Ganho Prop PI = Saída PI
Default:Mín/Máx:Unidades:
1,00,00/100,000,01
124a138
131 [Limite Inf PI]Configura o limite inferior da saída de PI.
Default:
Mín/Máx:
Unidades:
–[Freq. Máxima]–100%–/+400,0 Hz–/+800,0%0,1 Hz0,1%
079124a138
132 [Limite Sup de PI]Configura o limite superior de saída de PI.
Default:
Mín/Máx:
Unidades:
+[Freq. Máxima]100% –/+400,0 Hz–/+800,0% 0,1 Hz0,1%
079124a138
133 [Pre-Carga do PI]Configura o valor para pré-carregar a componente integral na partida ou ativação.
Default:
Mín/Máx:
Unidades:
0,0 Hz100,0% [Limite Inf PI]/[Limite Sup de PI]0,1 Hz0,1%
079124a138
134 [Status do PI]Status do regulador do Processo PI.
Leitura Somente 124a138
135 [Medidor Refer PI]Valor atual do sinal de referência de PI.
Default:Mín/Máx:Unidades:
Leitura Somente–/+100,0%0,1%
124a138
136 [Medid Fdback PI]Valor atual do sinal de feedback de PI.
Default:Mín/Máx:Unidades:
Leitura Somente–/+100,0%0,1%
124a138
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
Vector
Vector
Vector
Vector
Vector
Vector
Vector
000 0xxxxxxxxxxxx10 01234567891112131415
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
PI A
tivad
o
Mante
r PI
Rese
t PI
Lim
ite d
e Ent
PI

Programação e Parâmetros 3-29
COM
ANDO
DE
VELO
CIDA
DE
Proc
esso
PI
137 [Medidor Erro PI]Valor atual do erro de PI.
Default:Mín/Máx:
Unidades:
Leitura Somente–/+100,0%–/+200,0% 0,1%
124a138
138 [Medidor Saida PI]Apresenta o valor da saída de PI.
Default:Mín/Máx:
Unidades:
Leitura Somente–/+100,0 Hz–/+100,0% –/+800,0% 0,1 Hz0,1%
124a138
139 [Filtro LBPI]Firmware 2.001 e posteriores – Fornece filtro para o sinal de erro do Processo PI. A saída deste filtro é exibida no [Medidor Erro PI]. O valor zero desativará o filtro.
Default:Mín/Máx:Unidades:
0,0 Radiano0,0/240,0 Radianos0,1 Radiano
137
459 [Tempo deriv PI]Consulte a fórmula abaixo:
Default:Mín/Máx:Unidades:
0,00 Seg0,00/100,00 Segs0,01 Seg
460 [Referên. PI sup.]Gradua o valor superior de [Sel Refer de PI] da fonte.
Default:Mín/Máx:Unidades:
100,0%–/+100,0%0,1%
461 [Referên. PI inf.]Gradua o valor inferior de [Sel Refer de PI] da fonte.
Default:Mín/Máx:Unidades:
–100,0%–/+100,0%0,1%
462 [Feedback PI sup]Gradua o valor superior de [Feedback PI] da fonte.
Default:Mín/Máx:Unidades:
100,0%–/+100,0%0,1%
463 [Feedback PI inf]Gradua o valor inferior de [Feedback PI] da fonte.
Default:Mín/Máx:Unidades:
0,0%–/+100,0%0,1%
Reg
ulad
or d
e ve
loci
dade 445 [Loop veloc. Ki]
Controla o ganho de erro integral do regulador de velocidade. O inversor ajusta o [Loop Velocidade Ki] automaticamente quando um valor diferente de zero for introduzido para a [LB desejada vel.] ou se for realizado um auto-ajuste. Em geral, o ajuste manual deste parâmetro é necessário somente se a inércia do sistema não puder ser determinada através do auto-ajuste. [LB desejada vel.] é configurada em “0” quando for feito um ajuste manual para este parâmetro.
Default:Mín/Máx:Unidades:
7,00,0/4000,00,1
053
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
v3
Vector
v3
Vector
Vector
Vector v3
dErro de PI (%)
dt (s)PISaída = KD (s) x
Vector
Vector
Vector
Vector
FVVector

3-30 Programação e Parâmetros
COMAN
DO D
E VE
LOCI
DADE
Regu
lado
r de
velo
cida
de
446 [Loop veloc. Kp]Controla o ganho de erro proporcional do regulador de velocidade. O inversor ajusta o [Loop Velocidade Kp] automaticamente quando um valor diferente de zero for introduzido para a [LB desejada vel.] ou se for realizado um auto-ajuste. Em geral, o ajuste manual deste parâmetro é necessário somente se a inércia do sistema não puder ser determinada através do auto-ajuste. [LB desejada vel.] é configurada em “0” quando for feito um ajuste manual para este parâmetro.
Default:Mín/Máx:Unidades:
6,30,0/200,00,1
053
447 [Loop veloc. Kf]Controla o ganho de alimentação de avanço do regulador de velocidade. Ajustar o ganho Kf em um valor superior a zero reduz o sobreimpluso do feedback de velocidade em resposta a uma mudança brusca na referência de velocidade.
Default:Mín/Máx:Unidades:
0,00,0/0,50,1
053
449 [LB desejada vel.]Estabelece a largura de banda e determina o comportamento dinâmico do loop de velocidade. À medida que a largura de banda aumenta, o loop de velocidade se torna mais responsivo e pode rastrear uma referência mais rápida de mudança de velocidade.
O ajuste deste parâmetro fará com que o inversor calcule e altere os ganhos [Loop Velocidade Ki] e [Loop Velocidade Kp].
Default:Mín/Máx:Unidades:
0,0 Radiano/Seg0,0/250,0 Radianos/Seg0,1 Radiano/Seg
053
450 [Inércia Total]Representa o tempo em segundos para um motor acoplado a uma carga acelerar de zero até a velocidade básica no torque nominal do motor. O inversor calcula a Inércia Total durante o procedimento de inércia do auto-ajuste.
O ajuste deste parâmetro fará com que o inversor calcule e altere os ganhos [Loop Velocidade Ki] e [Loop Velocidade Kp].
Default:
Mín/Máx:
Unidades:
1,25 Seg0,10 Seg 0,1/600,0 Segs0,01/600,00 0,1 Seg0,01 Seg
053
451 [Medid vel circ]O valor da saída do regulador de velocidade.
Default:Mín/Máx:Unidades:
Leitura Somente–/+800,0%/Hz/RPM0,1%/Hz/RPM
053121079
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
FVVector
FVVector
FVVector
FVVector
v3
v3
v3
FVVector v3

Programação e Parâmetros 3-31
Arquivo de Controle DinâmicoA
rqui
vo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
CONT
ROLE
DIN
ÂMIC
O
Tax
as d
e Ra
mpa
s
140141
[Tempo Acelerac 1][Tempo Acelerac 2]Configura a taxa de aceleração para todos os aumentos de velocidade.
Default:
Mín/Máx:
Unidades:
10,0 Segs10,0 Segs0,1/3600,0 Segs0,0/3600,0 Segs 0,1 Seg
142143146361
142143
[Tempo Desacele 1][Tempo Desacele 2]Configura a taxa de desaceleração para todas as reduções de velocidade.
Default:
Mín/Máx:
Unidades:
10,0 Segs10,0 Segs0,1/3600,0 Segs0,0/3600,0 Segs 0,1 Seg
140141146361
146 [% Curva -S]Configura a porcentagem do tempo de aceleração ou desaceleração que é aplicada à rampa como Curva-S. O tempo é adicionado, 1/2 no início e 1/2 no final da rampa.
Default:Mín/Máx:Unidades:
0%0/100%1%
140a143
Lim
ites
de C
arga
147 [Sel Limite Corr]Seleciona a fonte para o ajuste do limite de corrente (por exemplo, parâmetro, entrada analógica, etc.).
Default:Opções:
0012
“Val Limite Corr”“Val Limite Corr”“Ent. Analóg. 1”“Ent. Analóg. 2”
146149
148 [Val Limite Corr]Define o valor do limite de corrente quando [Sel Limite Corr] = “Val. Limite Corr”.
Default:
Mín/Máx:
Unidades:
[Corrente Nominal] × 1,5(A equação produz o valor aproximado de default.)Baseado na classificação do inversor0,1 Amps
147149
149 [Ganho Limit Corr]Configura a reação do limite de corrente.
Default:Mín/Máx:Unidades:
2500/50001
147148
150 [Mod Sobrecar Inv]Seleciona a reação do inversor ao aumento de sua temperatura.
Default:Opções:
30123
“Ambos – 1o. PWM”“Desativado”“Reduzir LimCorr”“Reduzir PWM”“Ambos – 1o. PWM”
219
151 [Frequencia PMW]Configura a freqüência portadora para a saída de PWM. Redução do inversor pode ocorrer em freqüências portadoras superiores. Para obter mais informações sobre a redução, consulte o Manual de Referência do PowerFlex.
Importante: Quando o parâmetro 053 [Modo Desemp. Trq] estiver configurado em “Vetor FVC”, o inversor funcionará a 2 kHz ao operar abaixo de 6 Hz.
Default:
Mín/Máx:Unidades:
4 kHz2 kHz (Gabinetes 4-6, 600/690VCA)2/10 kHz2/4/8/10 kHz
Veloc. máx.Tempo aceleraç Taxa aceleraç=
v3
Veloc. máx.Tempo Desacele Taxa de desaceleração=
v3

3-32 Programação e Parâmetros
CON
TRO
LE D
INÂ
MIC
O
Lim
ites
de C
arga
152 [Queda RPM @ Inom]Seleciona o quanto a referência de velocidade é reduzida quando em torque de carga plena. Zero desativa a função de queda.
Importante: A seleção da opção “Compensação de escorregamento” do parâmetro 080 juntamente com o parâmetro 152 poderá produzir resultados indesejados.
Default:Mín/Máx:Unidades:
0,0 RPM0,0/200,0 RPM0,1 RPM
153 [Lim. força regen]Estabelece o limite de potência máxima que pode ser transferido do motor ao barramento CC. Ao utilizar um freio dinâmico externo, configure este parâmetro em seu valor máximo.
Default:Mín/Máx:Unidades:
–50,0%–800,0/0,0%0,1%
053
154 [Lim. taxa corr.]Estabelece a mais elevada taxa de mudança permitida para o sinal de referência de corrente. Este número é calculado como uma percentagem da corrente máxima do motor a cada 250 microssegundos.
Default:Mín/Máx:Unidades:
400,0%1,0/800,0%0,1%
053
Mod
os d
e Pa
rada
/Fre
nage
m
145 [FD parado]Ativa/desativa a operação do freio dinâmico quando o inversor estiver parado. O FD poderá operar se a tensão de entrada se tornar muito elevada.
Desativado = FD operará somente enquanto o inversor estiver em funcionamento.Ativar = FD pode operar sempre que o inversor estiver energizado.
Default:Opções:
001
“Desativado”“Desativado”“Ativado”
161162
155156
[Modo Parada A][Modo Parada B]
Modo de parada ativo. O [Modo Parada A] está ativo, exceto se [Modo Parada B] for selecionado por entradas.(1) Quando usar as opções 1 ou 2, consulte as declarações de Atenção em [Nivel Fren CC].
Default:Default:Opções:
100123
“Rampa”“Coast”“Coast”“Rampa”(1)
“Rampa para Manter”(1)
“Frenagem CC”
157158159
[Modo Par/Fren A][Modo Par/Fren B]
Veja a descrição acima.
157 [SelNivel Fren CC]Estabelece a fonte para [Nivel Fren CC].
Default:Opções:
0012
“Nivel Fren CC”“Nivel Fren CC”“Ent. Analóg. 1”“Ent. Analóg. 2”
155156158159
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
FVVector
FVVector
Vector v3
Standard
Standard
Vector
Vector

Programação e Parâmetros 3-33
CONT
ROLE
DIN
ÂMIC
O
Mod
os d
e Pa
rada
/Fre
nage
m
158 [Nivel Fren CC]Define o nível de corrente de frenagem CC injetada no motor quando o “Freio CC” é selecionado como modo de parada.
A tensão de frenagem CC usada nesta função é criada por um algoritmo PWM e talvez não produza a tensão de retenção estável necessária para algumas aplicações. Consulte o Manual de Referência do PowerFlex.
Default:Mín/Máx:
Unidades:
[Corrente Nominal]0/[Corrente Nominal] × 1,5(A equação produz aproximada- mente o valor máximo.)0,1 Amps
159 [Tempo Fren CC]Configura a quantidade de tempo que a corrente de frenagem CC é “injetada” no motor.
Default:Mín/Máx:Unidades:
0,0 Seg0,0/90,0 Segs0,1 Seg
155a158
160 [Ki Reg Barram]Configura a reação do regulador de barramento.
Default:Mín/Máx:Unidades:
4500/50001
161162
161162
[Mod Reg Barram A][Mod Reg Barram B]Configura o método e seqüência da tensão CC do regulador de barramento. As opções são frenagem dinâmica, ajuste de freqüência, ou ambas. A seqüência é determinada por programação ou entrada digital para o bloco de terminais.
Configuração de frenagem dinâmicaSe o resistor de frenagem dinâmica estiver conectado ao inversor, ambos os parâmetros devem ser configurados na opção 2, 3 ou 4.
Consulte a declaração de Atenção na página P-4 para obter informações sobre a regulação de barramento.
Default:
Opções:
1401234
“Ajustar Freq”“Ambos - Freq 1o.”“Desativado”“Ajustar Freq”“Fren Dinâmica”“Ambos - DB 1o.”“Ambos - Freq 1o.”
160163
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
!ATENÇÃO: Se houver um perigo de lesão devido ao movimento do equipamento ou material, deve-se usar um dispositivo auxiliar de frenagem mecânica.
ATENÇÃO: Este recurso não deve ser usado com motores de imã permanente ou síncronos. Os motores poderão ser desmagnetizados durante a frenagem.
!ATENÇÃO: O inversor não oferece proteção para resistores de freio montados externamente. Há risco de incêndio se os resistores de freio externos não forem protegidos. Os pacotes de resistores externos devem ter auto-proteção contra temperatura excessiva ou deve-se fornecer o circuito de proteção (ou equivalente) indicado na Figura C.1 na página C-1.

3-34 Programação e Parâmetros
CONTRO
LE D
INÂM
ICO
Mod
os d
e Pa
rada
/Fre
nage
m
163 [Tipo Resistor FD]Seleciona se será usado um resistor de frenagem dinâmica (FD) interno ou externo.
Importante: Nos inversores com gabinetes 0-3, apenas um resistor de FD pode ser conectado ao inversor. A conexão de um resistor interno e um externo pode causar danos.
Se o resistor de frenagem dinâmica estiver conectado ao inversor, os parâmetros [Mod Reg Barram A e B] devem ser configurados na opção 2, 3 ou 4.
Default:
Opções:
02012
“Res Interna”“Nenhum” “Res Interna”“Res Externa”“Nenhum”
161162
164 [Kp Reg Barram]Ganho proporcional para o regulador de barramento. Usado para ajustar a reação do regulador.
Default:Mín/Máx:Unidades:
15000/100001
165 [Kd Reg Barram]Ganho derivativo para o regulador de barramento. Usado para controlar o sobreimpulso do regulador.
Default:Mín/Máx:Unidades:
10000/100001
166 [Fluxo de Fren.]Configurado para utilizar um aumento na corrente de fluxo do motor para aumentar as perdas do motor e permitir um tempo de desaceleração mais rápido quando um freio de interrupção ou a capacidade regenerativa não estiver disponível. Pode ser usado como um método de parada ou desaceleração rápida.
Default:Opções:
001
“Desativado”“Desativado”“Ativado”
Mod
os d
e Re
inic
ializ
ação
167 [Retardo Energiz]Define o tempo de retardo programado (em segundos) antes que um comando de parada seja aceito após a energização.
Default:Mín/Máx:Unidades:
0,0 Seg0,0/30,0 Segs0,1 Seg
168 [Partida Energiz]Ativa/desativa uma característica para emitir um comando de Partida ou Operação, e reiniciar a operação automaticamente na velocidade comandada, após restaurada a energia de entrada do inversor. Exige uma entrada digital configurada para Operação ou Partida e um contato de partida válido.
Default:Opções:
001
“Desativado”“Desativado”“Ativado”
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
!ATENÇÃO: Poderá ocorrer danos no equipamento se um resistor (interno) montado no inversor for instalado e este parâmetro for configurado em “Res Externo” ou “Nenhum”. A proteção térmica para o resistor interno será desativada, resultando em possível dano no dispositivo. Veja também a declaração de ATENÇÃO acima.
Vector
Vector
ATENÇÃO: Poderá ocorrer danos no equipamento e/ou lesão pessoal se este parâmetro for utilizado em uma aplicação indevida. Não use essa função sem levar em consideração os códigos, padrões e regulamentos locais, nacionais e internacionais, ou as diretrizes da indústria.!

Programação e Parâmetros 3-35
CONT
ROLE
DIN
ÂMIC
O
Mod
os d
e Re
inic
ializ
ação
169 [Partid Mov Ativ]Ativa/desativa a função que reconecta a um motor em rotação na RPM real quando é emitido um comando de partida.
Não é necessário no modo Vetor FVC, quando um encoder estiver sendo usado.
Default:Opções:
001
“Desativado”“Desativado”“Ativado”
170
170 [Ganho Part Movim]Configura a reação da função partida móvel.
Importante: Motores de imã permanente podem exigir ganhos inferiores.
Default:Mín/Máx:Unidades:
400020/327671
169
174 [Tentat Rein Auto]Configura o número máximo de vezes que o inversor tenta fazer o reset de uma falha e reinicializar.
Default:Mín/Máx:Unidades:
00/91
175
175 [Temp entre tent]Configura o tempo entre as tentativas de reinicialização quando o parâmetro [Tent ReinAut] for configurado em um valor diferente de zero.
Default:Mín/Máx:Unidades:
1,0 Seg0,5/30,0 Segs0,1 Seg
174
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
ATENÇÃO: Poderá ocorrer danos no equipamento e/ou lesão pessoal se este parâmetro for utilizado em uma aplicação indevida. Não use essa função sem levar em consideração os códigos, padrões e regulamentos locais, nacionais e internacionais, ou as diretrizes da indústria.!

3-36 Programação e Parâmetros
CONTRO
LE D
INÂM
ICO
Mod
os d
e Re
inic
ializ
ação
178 [Modo ativ-inativ]Ativa/desativa a função Inativo/Ativo. Importante: Quando ativada, as seguintes condições devem ser atendidas:
• Um valor adequado deve ser programado para o [Nivelinativo] e [Nív. ativ-inativ].
• Deve-se selecionar uma referência de velocidade na [Sel Ref Veloc A].
• Pelo menos uma das funções seguintes devem ser programadas (e a entrada fechada) na [Sel Entr Digit x]; “Ativar”, “Parada=CF”, “Operação”, “Operação para Frente”, “Operação Reversa”.
Default:Opções:
0012
“Desativado”“Desativado”“Direto” (Ativado)“Inverter” (Ativado) (7)
(1) Quando houver um ciclo de energia, ocorrerá a reinicialização se todas as condições acima estiverem presentes após a alimentação ser restaurada.
(2) Se todas as condições acima estiverem presentes quando o [Modo ativ-inativ] for “ativado”, o inversor inicializará.
(3) A referência de velocidade ativa é determinada conforme explicado em Controle de referência na página 1-22. A função Inativo/Ativo e a referência de velocidade podem ser designadas para a mesma entrada.
(4) O comando deve ser emitido a partir da HIM, BT ou rede.(5) O comando de operação deve passar por um ciclo.(6) O sinal não precisa ser maior do que o Nív. ativ-inativ.(7) Firmware de vetor versão 3.xxx e posteriores. Para a função Inverter, consulte [Perda Ent Anlg x].
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
ATENÇÃO: A ativação da função Inativo-Ativo pode causar uma operação inesperada da máquina durante o modo Ativo. Poderá ocorrer danos no equipamento e/ou lesão pessoal se este parâmetro for utilizado em uma aplicação indevida. Não use essa função sem levar em consideração as informações abaixo e o Apêndice C. Além disso, devem-se considerar também todos os padrões, códigos e regulamentos locais, nacionais e internacionais, ou as diretrizes da indústria que se apliquem.
!
Condições necessárias para inicializar o inversor(1)(2)(3)
Entrada
Após a energização Após uma falha do inversor Após um comando de parada
Reset pela Parada-CF,HIM ou BT
Reset pela Remoção de Falhas (BT) HIM ou BT
Parada Parada fechouSinal de Ativar
Parada fechouSinal de AtivarNovo comando de partida ou operação(4)
Parada fechouSinal de Ativar
Parada fechouModo DiretoSin. Analógico > Nivelinativo(6)
Modo de InversãoSin. Analógico < Nivelinativo(6)
Novo comando de partida ou operação(4)
Ativar Ativação fechouSinal de Ativar (4)
Ativação fechouSinal de AtivarNovo comando de partida ou operação(4)
Ativação fechouSinal de Ativar
Ativação fechouModo DiretoSin. Analógico > Nivelinativo(6)
Modo de InversãoSin. Analógico < Nivelinativo(6)
Novo comando de partida ou operação(4)
OperarOperação
p/Fr.Operação
reversa
Operação fechouSinal de Ativar
Novo comando operação(5)
Sinal de AtivarOperação fechouSinal de Ativar
Novo comando operação(5)
Sinal de Ativar

Programação e Parâmetros 3-37
CO
NTR
OLE
DIN
ÂM
ICO Mod
os d
e Re
inic
ializ
ação
179 [Ref ativ- inativ]Seleciona a fonte de entrada que controla a função Inativo-Ativo.
Default:Opções:
212
“Ent. Analóg. 2”“Ent. Analóg. 1”“Ent. Analóg. 2”
180 [Nív. ativ-inativ]Define o nível da entrada analógica que inicializará o inversor.
Default:Mín/Máx:
Unidades:
6,000mA, 6,000 Volts[Nivelinativo]/ 20,000mA 10,000 Volts0,001mA0,001 Volts
181
181 [Tempo ativo]Define a quantidade de tempo igual ou superior ao [Nív. ativ-inativ] antes que seja emitida uma Partida.
Default:
Mín/Máx:Unidades:
1,0 Seg0,0 Seg 0,0/30,0 Segs0,0/1000,0 Segs 0,1 Seg
180
182 [Nivelinativo]Define o nível da entrada analógica que irá parar o inversor.
Default:Mín/Máx:
Unidades:
5,000mA, 5,000 Volts4,000mA/[Nív. ativ-inativ]0,000 Volts/[Nív. ativ-inativ]0,001mA0,001 Volts
183
183 [Tempo inativo]Define a quantidade de tempo igual ou inferior ao [Nivelinativo] antes que seja emitida uma Parada.
Default:
Mín/Máx:Unidades:
1,0 Seg0,0 Seg 0,0/30,0 Segs0,0/1000,0 Segs 0,1 Seg
182
Per
da d
e Po
tênc
ia
177 [Nível Adv terra]Estabelece o nível no qual ocorrerá uma falha de advertência do aterramento. Configurar com [Config Alarme 1].
Default:Mín/Máx:Unidades:
3,0 Amps1,0/5,0 Amps0,1 Amps
259
184 [Modo Perda Pot]Configura a reação a uma perda de potência de entrada. A perda de potência é reconhecida quando:
• A tensão no barramento CC for ≤ 73% da [Mem. Barram CC] e [Modo Perda Pot] estiver configurado em “Coast”.
• A tensão no barramento CC for ≤ 82% da [Mem. Barram CC] e [Modo Perda Pot] estiver configurado em “Desaceleração”.
Default:Opções:
001234
“Coast”“Coast”“Desaceleração”“Continuar”“Entrada Coast”“Entrada Desaceleraç”
013185
185 [Tempo Perda Pot]Configura o tempo que o inversor permanecerá no modo de perda de potência antes que seja emitida uma falha.
Default:Mín/Máx:Unidades:
0,5 Seg0,0/60,0 Segs0,1 Seg
184
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
Vector
Vector
Vector
Vector v3

3-38 Programação e Parâmetros
Arquivo Utilitário
CO
NTRO
LE D
INÂ
MIC
O
Perd
a de
pot
ênci
a
186 [Nível Perda Pot]Configura o nível no qual ocorrerá a seleção do [Modo Perda Pot].
Default:Mín/Máx:Unidades:
Tensão Nominal do Inversor0,0/999,9 VCC0,1 VCC
187 [Nív Perda Carga]Estabelece a porcentagem do torque de identificação do motor na qual ocorrerá o alarme de perda de carga.
Default:Mín/Máx:Unidades:
200,0%0,0/800,0%0,1%
211259
188 [TempoPerdaCarga]Estabelece o tempo em que a corrente se encontra abaixo do nível configurado em [Nív Perda Carga] antes da ocorrência de uma falha.
Default:Mín/Máx:Unidades:
0,0 Seg0,0/30,0 Segs0,1 Seg
187
189 [Tempo PinoProt]Estabelece o tempo que o inversor está no limite de corrente ou acima dele antes de ocorrer uma falha. O valor zero desativa este recurso.
Default:Mín/Máx:Unidades:
0,0 Seg0,0/30,0 Segs0,1 Seg
238
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
O inversor pode usar as porcentagens recomendadas no [Modo Perda Pot] ou um ponto de disparo poderá ser ajustado para a detecção de perda de linha da seguinte maneira:
Vdisparo = [Mem. Barram CC] – [Nível Perda de Potência]
Uma entrada digital (programada para o parâmetro “29, Nív Perda Pot”) é usada para alternar entre as porcentagens fixas e o nível de detecção.
!ATENÇÃO: Poderá ocorrer danos no inversor caso não seja fornecida uma impedância de entrada adequada, como explicado a seguir.
Se o valor para o [Nível Perda de Potência] for maior que 18% da [Memória no Barramento CC], o usuário deve fornecer uma impedância de linha mínima para limitar a corrente de partida quando a alimentação é reestabelecida. A impedância de entrada deve ser igual ou maior do que o equivalente a um transformador de 5% com classificação VA 5 vezes a classificação VA de entrada do inversor.
Vector v3
Vector v3
Vector v3
Arq
uivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
UTIL
ITÁR
IO
Conf
ig D
ireçã
o 190 [Modo Direcao]Seleciona o método de mudança da direção.
Default:Opções:
0012
“Unipolar”“Unipolar”“Bipolar”“Reverso Des”
320a327361a366
Modo Mudança de DireçãoUnipolar Lógica do InversorBipolar Sinal de ReferênciaReverso Des Invariável

Programação e Parâmetros 3-39
UTI
LITÁ
RIO
Con
fig R
ef H
IM
192 [Grava Refer HIM]Ativa o recurso para gravar o valor de referência da freqüência atual emitida pela HIM para a Memória do Inversor quando houver perda de potência. O valor é restaurado para a HIM durante a energização.
193 [Pre-cargaREFMan]Ativa/desativa um recurso para carregar automaticamente o valor de referência atual da freqüência “Auto” na HIM quando for selecionado “Manual”. Permite uma transição suave da velocidade de “Auto” para “Manual”.
Default:Opções:
001
“Desativado”“Desativado”“Ativado”
Con
fig M
OP
194 [Grava Refer. MOP]Ativa/desativa a característica que salva a referência de freqüência atual do MOP durante a falta de energia ou na parada.
195 [Taxa MOP]Configura a taxa de mudança da referência de MOP em reação a uma entrada digital.
Default:
Mín/Máx:
Unidades:
1,0 Hz/s30,0 RPM/s 0,2/[Freq. Maxima]6,0/[Freq. Maxima] 0,1 Hz/s0,1 RPM/s
Mem
ória
do
Inve
rsor 196 [Niv Aces Param]
Seleciona o nível de exibição de parâmetro.Básico = Conjunto parâm. reduzidoAvançado = Conjunto parâm. totalVent./Bomba = Conjunto reduzido do vent./bombaVent./Bomba Avanç = Conjunto total do vent./bomba(1) Inversores com controle padrão v3.001 e posteriores.
Default:Opções:
001234
“Básico”“Básico”“Avançado”“Reservado”“Vent./Bomba”(1)
“Vent./Bomba Avanç”(1)
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
xxx 1xxxxxxxxxxxx10 01234567891112131415
1=Salvar na falta de energia0=Não Salvarx =Reservado
No. BitValores de Fábrica dos Bits
Na fa
lta en
ergi
a
0xx 0xxxxxxxxxxxx10 01234567891112131415
1=Salvar na falta de energia0=Não Salvarx =Reservado
No. BitValores de Fábrica dos Bits
Na fa
lta en
ergi
a
Na P
arad
a
Vector
Vector
Vector

3-40 Programação e Parâmetros
UTILIT
ÁRIO
Mem
ória
do
Inve
rsor
197 [Volta p/ Default]Restaura os parâmetros aos valores de fábrica, com exceção de [Idioma], [Niv Aces Param], [Classe Tensão] e [ConfigProvaTrq] (parâmetros 196, 201, 202 e 600).
• A opção 1 restaura parâmetros aos defaults de fábrica baseada na [Classe Tensão].
• As opções 2 e 3 restaurarão os parâmetros aos valores de fábrica e configurarão a [Classe Tensão] em baixa ou alta tensão.
Importante: Gabinetes 5 e 6 – a tensão interna do ventilador talvez precise ser alterada se for usada a Opção 2 ou 3. Consulte “Seleção/verificação da tensão do ventilador” na página 1-8.
Default:Opções:
00123
“Pronto”“Pronto”“Fábrica”“Baixa Tensão”“Alta Tensão”
041a 047054055062063069a072082148158
198 [Carreg Cfg Usuar]Carrega um conjunto de valores de parâmetros previamente gravado de um endereço selecionado de conjunto do usuário na memória não volátil para a memória ativa do inversor.
Default:Opções:
00123
“Pronto”“Pronto”“Conjunto do Usuário1”“Conjunto do Usuário2”“Conjunto do Usuário3”
199
199 [Grava Cnfg Usuar]Grava os valores de parâmetros na memória ativa do inversor para uma memória não volátil do inversor configurada pelo usuário.
Default:Opções:
00123
“Pronto”“Pronto”“Conjunto do Usuário1”“Conjunto do Usuário2”“Conjunto do Usuário3”
198
200 [Reset Medid]Reconfigura os medidores selecionados para zero.
Default:Opções:
0012
“Pronto”“Pronto”“MWh”“Tempo Decorrido”
201 [Idioma]Seleciona o idioma exibido ao usar uma HIM de LCD. Este parâmetro não funciona com uma HIM de LED.
As opções 6, 8 e 9 são “Reservadas”.
Default:Opções:
0012345710
“Não Selecionado”“Não Selecionado”“English”“Francais”“Español”“Italiano”“Deutsch”“Português”“Nederlands”
202 [Classe Tensão]Configura a classificação de corrente do inversor e associa ela com a tensão selecionada (por exemplo, 400 ou 480 V). Usada geralmente durante o download de conjuntos de parâmetros. As opções 2 e 3 indicam somente o status. A seleção da Opção 4 ou 5 converterá/configurará o inversor. Os valores mín/máx e de default serão mudados para os parâmetros 41-47, 54, 55, 62, 63, 69, 70-72, 82, 148, 158.
Importante: Gabinetes 5 e 6 – a tensão interna do ventilador talvez precise ser alterada se for utilizada a Opção 4 ou 5. Consulte a página 1-8.
Default:
Opções: 234
5
(1)
Baseado no No. de Cat. do Inversor“Baixa Tensão”“Alta Tensão”“Reservado”(1)
“Converter em BTens” “Reservado”(1)
“Converter em ATens”
Firmware de vetor v3.001 e superior.
041a 047054055062063069a072082148158
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
Vector

Programação e Parâmetros 3-41
UTIL
ITÁR
IO
Mem
ória
do
Inve
rsor 203 [Checksum Inv]
Fornece um valor de checksum que indica se uma mudança ocorreu ou não na programação do inversor.
Default:Mín/Máx:Unidades:
Leitura Somente0/655351
Dia
gnós
ticos
209 [Status Inversor1]Condição de operação atual do inversor.
Leitura Somente 210
210 [Status Inversor2]Condição de operação atual do inversor.
Leitura Somente 209
211 [Alarme1 Inver.]Condições de alarme que existem atualmente no inversor.
Leitura Somente 212
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
011 000000111000010 01234567891112131415
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
Pron
to
Ativo
Dir C
oman
do
Dir R
eal
Acele
rand
o
Desa
celer
ando
Alar
me
Falh
a
Na ve
locid
ade
Cont
Loc
al 0
(1)
Cont
Loc
al 1
(1)
Cont
Loc
al 2
(1)
Cont
Ref
Vel 0
(2)
Cont
Ref
Vel 1
(2)
Cont
Ref
Vel 2
(2)
Cont
Ref
Vel 3
(2)
Bits (2)
Descrição
Bits (1)
Descrição15 14 13 12 11 10 9
0000000011111111
0000111100001111
0011001100110011
0101010101010101
Ref A AutoRef B AutoPré-Progr 2 AutoPré-Progr 3 AutoPré-Progr 4 AutoPré-Progr 5 AutoPré-Progr 6 AutoPré-Progr 7 AutoBT ManualPorta 1 ManualPorta 2 ManualPorta 3 ManualPorta 4 ManualPorta 5 ManualPorta 6 ManualRef de Jog
00001111
00110011
01010101
Porta 0 (BT)Porta 1Porta 2Porta 3Porta 4Porta 5Porta 6Sem Controle Local
000 00000000000xx10 01234567891112131415
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
Pron
to
Ativo
Opera
ndo
Jogg
ing
Para
ndo
Fren
agem
CC
Auto
-aju
ste
Cont
Rein
Aut
Aç R
einAu
t
Lim
it Co
rr
Reg
Freq
Bar
ram
.
Sobr
ec M
otor
DPI a
500K
* Firmware de vetor 3.001 e posteriores
FD ac
iona
da *
000 000x00000000x10 01234567891112131415
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
Term
. do
mot
or *
Perd
a Fas
e Ent
*
Perd
a de c
arga
*
Adv T
erra
*
* Firmware de vetor 3.001 e posteriores
Prec
arg
Ativ
Subt
ensã
o
Perd
a de p
otên
cia
Part
na E
nerg
.
Perd
a Ent
Anlg
Sbra
q Rs
FDIn
Nív S
brcIn
v 1
Nív S
brcIn
v 2
Inib
ição
de D
esac
el
Ativa
ção

3-42 Programação e Parâmetros
UTILIT
ÁRIO
Diag
nóst
icos
212 [Alarme2 Inver.]Condições de alarme que existem atualmente no inversor.
Leitura Somente 211
213 [Fonte Ref Veloc]Exibe a fonte de referência de velocidade para o inversor.(1) Firmware de vetor versão 3.001 e posteriores.
Default:Opções: 0
123-67891011-17181920212223242526272829
Leitura Somente“Saída de PI”“Ent. Analóg. 1”“Ent. Analóg. 2”“Reservado”“Entr. Pulso”“Encoder”“Nível MOP”“Veloc. de Jog 1”“Vel Prprog1-7”“Porta DPI 1”“Porta DPI 2”“Porta DPI 3”“Porta DPI 4”“Porta DPI 5”“Reservado”“Auto-ajuste” “Veloc. de Jog 2” “Bloco de Escala 1” (1)
“Bloco de Escala 2” (1)
“Bloco de Escala 3” (1)
“Bloco de Escala 4” (1)
090093096101
214 [Inib Partida]Exibe as entradas que atualmente impedem a inicialização do inversor.
Leitura Somente
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
000 000000000000010 01234567891112131415
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
Conf
Ref
BT
Conf
lito
PTC
*
Freio
esco
rrego
u (p
atin
ou) *
xxx 0xxxxxxxxxxxx26 161718192021222324252728293031
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
Conf
l Pro
vaTo
rq *
* Firmware de vetor 3.001 e posteriores
Conf
EntD
igA
Conf
Ent
DigB
Conf
Ent
DigC
Conf
l Bip
ol
Conf
Tipo
Mtr
Conf
Hz P
lac
Conf
Fre
qMax
VHz N
egSl
ope
Lim
Tens
IR
ReCo
rFlxF
Lim
Conf
Ref
Vel
Faixa
Tens
Ixo
Conf
ig In
ativo
Vector
Vector
000 0100x100000xx10 01234567891112131415
1=Inibição Verdadeira0=Inibição Falsax =Reservado
No. Bit
Falh
a
Alar
me T
ipo
2
Ativa
r
Pré-
carg
Bar
ram
. CC
Para
da A
sseg
urad
a
Rese
t Par
âm
Ativ.
Ene
rgiza
ção
Ent D
igita
l
Porta
DPI
1
Porta
DPI
2
Porta
DPI
3
Porta
DPI
4
Porta
DPI
5

Programação e Parâmetros 3-43
UTIL
ITÁR
IO
Diag
nóst
icos
215 [Fonte Ult Parada]Exibe a fonte que iniciou a seqüência de parada mais recente. Ela será removida (configurada em 0) durante a próxima seqüência de partida.
Default:Opções: 0
1-5678910111213
Leitura Somente“Força Removida”“Porta DPI 1-5”“Reservado”“Ent Digital”“Falha”“Não Ativado”“Inativo”“Jog”“Auto-ajuste” “Pré-carga”
361362363364365366
216 [Status Ent Dig]Status das entradas digitais.
Leitura Somente 361a366
217 [Status Saida Dig]Status das saídas digitais.
Leitura Somente 380a384
218 [Temp Inv]Apresenta a temperatura de operação da seção de tensão do inversor.
Default:Mín/Máx:Unidades:
Leitura Somente0,0/100,0%0,1%
219 [Cont. Sbrcor Inv]A porcentagem acumulada de sobrecarga do inversor. A operação contínua do inversor acima de 100% de sua classificação aumentará este valor para 100% e causará uma falha ou “foldback” do inversor dependendo da configuração do [Modo Sobrecar Inv].
Default:Mín/Máx:Unidades:
Leitura Somente0,0/100,0%0,1%
150
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
Vector
000 000xxxxxxxxxx10 01234567891112131415
1=Entrada Presente0=Entrada Não Presentex =Reservado
No. BitEn
t Dig
ital1
Ent D
igita
l2
Ent D
igita
l3
Ent D
igita
l4
Ent D
igita
l5
Ent D
igita
l6
00x 0xxxxxxxxxxxx10 01234567891112131415
1=Saída Energizada0=Saída Não Energizadax =Reservado
No. Bit * Somente na opção com controle vetorial
Saíd
a Dig
1
Saíd
a Dig
2
Saíd
a Dig
3 *

3-44 Programação e Parâmetros
UTILIT
ÁRIO
Diag
nóst
icos
220 [Cont. Sobrec mot]A porcentagem acumulada de sobrecarga do motor. A operação contínua do motor acima de 100% de sua configuração de sobrecarga aumentará este valor para 100% e causará uma falha do inversor.
Default:Mín/Máx:Unidades:
Leitura Somente0,0/100,0%0,1%
047048
224 [Freqüência de Falha]Capta e exibe a velocidade de saída do inversor na ocasião da última falha.
Default:Mín/Máx:Unidades:
Leitura Somente0,0/+[Freq. Máxima]0,1 Hz
225a230
[Velocidade falha]Veja a descrição acima.
Default:Mín/Máx:
Unidades:
Leitura Somente0,0/+[Freq. Máxima]0,0/+[Velocidade Max.]0,1 Hz0,1 RPM
079225a230
225 [Falha Corrente]Capta e exibe a corrente do motor na ocasião da última falha.
Default:Mín/Máx:Unidades:
Leitura Somente0,0/[Corrente Nominal] × 20,1 Amps
224a230
226 [FalhaTens Barram]Capta e exibe a tensão no barramento CC do inversor na ocasião da última falha.
Default:Mín/Máx:Unidades:
Leitura Somente0,0/Tensão Máx Barram.0,1 VCC
224a230
227 [Status Falha 1] Capta e exibe o padrão do bit do [Status Inversor1] na ocasião da última falha.
Leitura Somente 209224a230
228 [Status Falha 2] Capta e exibe o padrão do bit do [Status Inversor2] na ocasião da última falha.
Leitura Somente 210224a230
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Standard
Vector
011 000010111000010 01234567891112131415
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
Pron
to
Ativo
Dir C
oman
do
Dir R
eal
Acele
rand
o
Desa
celer
ando
Alar
me
Falh
a
Na ve
locid
ade
Cont
Loc
al 0
Cont
Loc
al 1
Cont
Loc
al 2
Vel R
ef D
isp 0
Vel R
ef D
isp 1
Vel R
ef D
isp 2
Vel R
ef D
isp 3
000 00000000000xx10 01234567891112131415
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
Pron
to
Ativo
Opera
ndo
Jogg
ing
Para
ndo
Fren
agem
CC
Auto
-aju
ste
Cont
Rein
Aut
Aç R
einAu
t
Lim
it Co
rr
Reg
Freq
Bar
ram
.
Sobr
ec M
otor
DPI a
500K
* Firmware de vetor 3.001 e posteriores
FD ac
iona
da *

Programação e Parâmetros 3-45
UTIL
ITÁR
IO
Diag
nóst
icos
229 [Alarme 1 Falha]Capta e exibe o [Alarme 1 Inver.] na ocasião da última falha.
Leitura Somente 211224a230
230 [Alarme 2 Falha]Capta e exibe o [Alarme 2 Inver.] na ocasião da última falha.
Leitura Somente 212224a230
234236
[Sel Ponto Teste1][Sel Ponto Teste2]Seleciona a função cujo valor é exibido em [Dados Ponto Testex].
São valores internos que não podem ser acessados através de parâmetros.
Consulte Funções e Códigos de Pontos de Teste na página 4-16 para uma lista dos códigos e funções disponíveis.
Default:Mín/Máx:Unidades:
4990/655351
235237
[DadoPonto Teste1][DadoPonto Teste2]O atual valor da função selecionada em [Sel Ponto Testex].
Default:Mín/Máx:
Unidades:
Leitura Somente0/4294967295–/+2147483648 1
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
000 000x00000000x10 01234567891112131415
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
Term
. do
mot
or *
Perd
a Fas
e Ent
*
Perd
a de c
arga
*
Adv T
erra
*
* Firmware de vetor 3.001 e posteriores
Prec
arg
Ativ
Subt
ensã
o
Perd
a de p
otên
cia
Part
na E
nerg
.
Perd
a Ent
Anlg
Sbra
q Rs
FDIn
Nív S
brcIn
v 1
Nív S
brcIn
v 2
Inib
ição
de D
esac
el
Ativa
ção
000 000000000000010 01234567891112131415
1=Condição Verdadei0=Condição Falsax =Reservado
No. Bit
Conf
Ref
BT
Conf
lito
PTC
*
Freio
esco
rrego
u (p
atin
ou) *
xxx 0xxxxxxxxxxxx26 161718192021222324252728293031
1=Condição Verdadei0=Condição Falsax =Reservado
No. Bit
Conf
l Pro
vaTo
rq *
* Firmware de vetor 3.001 e posteriores
Conf
EntD
igA
Conf
Ent
DigB
Conf
Ent
DigC
Conf
l Bip
ol
Conf
Tipo
Mtr
Conf
Hz P
lac
Conf
Fre
qMax
VHz N
egSl
ope
Lim
Tens
IR
ReCo
rFlxF
Lim
Conf
Ref
Vel
Faixa
Tens
Ixo
Conf
ig In
ativo
32 Vector

3-46 Programação e Parâmetros
UTILIT
ÁRIO
Fal
has
238 [Config Falha 1]Ativa/desativa o aviso das falhas listadas.
240 [Remocao Falha]Reconfigura uma falha e remove a fila de falhas.
Default:Opções:
0012
“Pronto”“Pronto”“Remover Falhas”“Remov. Fila Fal”
241 [Modo Remoc Falha]Ativa/desativa uma tentativa de reconfiguração de falha (remover falhas) de qualquer fonte. Isto não se aplica aos códigos de falhas que são indiretamente removidos por outras ações.
Default:Opções:
101
“Ativado”“Desativado”“Ativado”
242 [Marcad Energizaç]Horas decorridas desde a energização inicial do inversor. Este valor passará para 0 após o inversor ter sido energizado um número de vezes superior ao valor máximo indicado. Para ligação à energização mais recente, consulte [Tempo Falha x].
Default:Mín/Máx:
Unidades:
Leitura Somente0,0000/429496,7295 Hr0,0/429496,7 Hr 0,0000/214748,3647 Hr 0,0001 Hr0,1 Hr
244 246 248 250 252 254 256 258
243245247249251253255257
[Codigo Falha 1][Codigo Falha 2][Codigo Falha 3][Codigo Falha 4][Codigo Falha 5][Codigo Falha 6][Codigo Falha 7][Codigo Falha 8]Um código que representa a falha que disparou o inversor. Os códigos aparecerão nestes parâmetros na ordem em que eles ocorrerem ([Codigo Falha 1] = a falha mais recente).
Default:Mín/Máx:Unidades:
Leitura Somente0/655350
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
1x1 0001000x00xxx10 01234567891112131415
1=Ativado0=Desativadox =Reservado
No. BitValores padrão de fábrica
Term
. do
mot
or *
Perd
a Fas
e Ent
*
Perd
a de c
arga
*
Acel.
pin
o de
pro
teçã
o *
Perd
a Fas
e Saí
*
* Firmware de vetor 3.001 e posteriores
Perd
a de p
otên
cia
Subt
ensã
o
Sobr
ec M
otor
Pino
de P
rote
ção
Tent
Rein
Aut
Inib
ição
de D
esac
el
32Vector
v3
Vector

Programação e Parâmetros 3-47
UTIL
ITÁR
IO
Falh
as
244246248250252254256258
[Tempo Falha 1][Tempo Falha 2][Tempo Falha 3][Tempo Falha 4][Tempo Falha 5][Tempo Falha 6][Tempo Falha 7][Tempo Falha 8]O tempo entre a energização inicial do inversor e ocorrência da falha de disparo associada. Pode ser comparado ao [Marcad Energizaç] para o tempo desde a energização mais recente.
[Tempo Falha x] – [Marcad Energizaç] = Diferença de tempo à energização mais recente. Um valor negativo indica que a falha ocorreu antes da energização mais recente. Um valor positivo indica que a falha ocorreu após a energização mais recente.
Default:Mín/Máx:
Unidades:
Leitura Somente0,0000/429496,7295 Hr0,0000/214748,3647 Hr 0,0001 Hr
242
Ala
rmes
259 [Config Alarme 1]Ativa/desativa as condições de alarme que iniciarão um alarme ativo do inversor.
261 [Remoção Alarme]Reconfigura todos parâmetros [Código Alarme 1-8] para zero.
Default: Opções:
001
“Pronto”“Pronto”“Rem. Fila Alarme”
262 263 264 265 266 267 268 269
262263264265266267268269
[Código Alarme 1][Código Alarme 2][Código Alarme 3][Código Alarme 4][Código Alarme 5][Código Alarme 6][Código Alarme 7][Código Alarme 8]Um código que representa um alarme do inversor. Os códigos aparecerão na ordem em que ocorrerem (fila dos primeiros 4 alarmes que entram - primeiros 4 alarmes que saem). Um indicador de tempo não se encontra disponível com os alarmes.
Default:Mín/Máx:Unidades:
Leitura Somente0/655351
261
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
32
v3
111 111x11110000x10 01234567891112131415
1=Ativado0=Desativadox =Reservado
No. BitValores de Fábrica dos Bits
Term
. do
mot
or *
Perd
a Fas
e Ent
*
Perd
a de c
arga
*
Adv T
erra
*
* Firmware de vetor 3.001 e posteriores
Prec
arg
Ativ
Subt
ensã
o
Perd
a de p
otên
cia
Part
na E
nerg
.
Perd
a Ent
Anlg
Sbra
q Rs
FDIn
Nív S
brcIn
v 1
Nív S
brcIn
v 2
Inib
Desa
cel
Ativa
ção

3-48 Programação e Parâmetros
UTILIT
ÁRIO
Bloc
os d
e es
cala
476482488494
[Esc.1 Valor Ent.][Esc.2 Valor Ent.][Esc.3 Valor Ent.][Esc.4 Valor Ent.]
Exibe o valor do sinal que está sendo enviado ao [Esc.X Valor Ent.] usando um link.(1) Blocos 3 e 4 somente.
Default:Mín/Máx:
Unidades:
0,0–/+32000,0–/+32767,0 (v2.xxx)–/+32767,000 (1)
0,10,001
477483489495
[Esc.1 Ent. Sup.][Esc.2 Ent. Sup.][Esc.3 Ent. Sup.][Esc.4 Ent. Sup.]
Gradua o valor superior do [Esc.X Valor Ent.].(1) Blocos 3 e 4 somente.
Default:Mín/Máx:
Unidades:
0,0–/+32000,0–/+32767,0 (v2.xxx)–/+32767,000 (1)
0,10,001
478484490496
[Esc.1 Ent. Inf.][Esc.2 Ent. Inf.][Esc.3 Ent. Inf.][Esc.4 Ent. Inf.]
Gradua o valor inferior do [Esc.X Valor Ent.].(1) Blocos 3 e 4 somente.
Default:Mín/Máx:
Unidades:
0,0–/+32000,0–/+32767,0 (v2.xxx)–/+32767,000 (1)
0,10,001
479485491497
[Esc.1 Saída Sup.][Esc.2 Saída Sup.][Esc.3 Saída Sup.][Esc.4 Saída Sup.]
Gradua o valor superior do [Valor Saída escalaX].(1) Blocos 3 e 4 somente.
Default:Mín/Máx:
Unidades:
0,0–/+32000,0–/+32767,0 (v2.xxx)–/+32767,000 (1)
0,10,001
480486492498
[Esc.1 Saída Inf.][Esc.2 Saída Inf.][Esc.3 Saída Inf.][Esc.4 Saída Inf.]
Gradua o valor inferior do [Valor Saída escalaX].(1) Blocos 3 e 4 somente.
Default:Mín/Máx:
Unidades:
0,0–/+32000,0–/+32767,0 (v2.xxx)–/+32767,000 (1)
0,10,001
481487493499
[Esc.1 ValorSaída][Esc.2 ValorSaída][Esc.3 ValorSaída][Esc.4 ValorSaída]
O valor que está sendo enviado para fora do bloco de escala universal. Este valor é tipicamente usado como fonte de informações e estará vinculado a outro parâmetro.(1) Blocos 3 e 4 somente.
Default:Mín/Máx:
Unidades:
Leitura Somente–/+32000,0–/+32767,0 (v2.xxx)–/+32767,000 (1)
0,10,001
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
Vector
Vector v3
Vector v3 v3
v3
Vector
Vector
Vector v3
Vector v3 v3
v3
Vector
Vector
Vector v3
Vector v3 v3
v3
Vector
Vector
Vector v3
Vector v3 v3
v3
Vector
Vector
Vector v3
Vector v3 v3
v3
Vector
Vector
Vector v3
Vector v3 v3
v3

Programação e Parâmetros 3-49
Arquivo de ComunicaçãoA
rqui
vo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
COM
UNIC
AÇÃO
Con
trole
de
Com
un.
270 [Taxa Dados DPI]Configura a taxa de taxa de transmissão de dados (baud) para os periféricos conectados ao inversor. Quando este valor for alterado, deve-se fazer o reset do inversor para que a mudança passe a vigorar.
Default:Opções:
001
“125 kbps”“125 kbps”“500 kbps”
[Taxa de Transmissão de Dados DPI]Veja a descrição acima.
Default: 1 “500 kbps”
271 [Res Logic Inver]O comando final de lógica resultante da combinação de todas as entradas discretas e DPI. Este parâmetro possui a mesma estrutura que um comando de lógica específico ao produto recebido pela DPI e usado em comunicações “peer a peer” (não-hierárquicas).
Leitura Somente
272 [Res. Ref. Inver]A referência de freqüência atual graduada como uma referência DPI para comunicações não-hierárquicas. O valor indicado é o valor anterior à rampa de acel/desacel e às correções fornecidas pela compensação de escorregamento, PI, etc.
Default:Mín/Máx:Unidades:
Leitura Somente–/+327671
273 [Res. Rampa Inver]A referência de freqüência atual graduada como uma referência DPI para comunicações não-hierárquicas. O valor indicado é o valor após a rampa de acel/desacel, porém anterior às correções fornecidas pela compensação de escorregamento, PI, etc.
Default:Mín/Máx:Unidades:
Leitura Somente–/+327671
Standard
Vector
011 000010111000010 01234567891112131415
1=Condição Verdadeira0=Condição Falsax =Reservado
No. Bit
Para
da
Parti
da
Jog
Rem
oção
Falh
a
Para
Fre
nte
Reve
rso
Ctrl
Loca
l
Inc M
op
Acele
raç 1
Acele
raç 2
Desa
cel 1
Desa
cel 2
Cont
Ref
Vel 0
(1)
Cont
Ref
Vel 1
(1)
Cont
Ref
Vel 2
(1)
Des M
OP
Bits (1)
Descrição14 13 12
00001111
00110011
01010101
Sem Comando – Modo Man. Ref A AutoRef B AutoPré-Progr 3 AutoPré-Progr 4 AutoPré-Progr 5 AutoPré-Progr 6 AutoPré-Progr 7 Auto

3-50 Programação e Parâmetros
COMUN
ICAÇ
ÃO
Cont
role
de
Com
un.
274 [Seleç. Porta DPI]Seleciona qual o valor de referência da porta DPI que aparecerá em [Valor Porta DPI].
Default:Opções: 1-5
“Porta DPI 1”“Porta DPI 1-5”
275 [Valor Porta DPI]O valor da referência de DPI selecionado em [Seleção Porta DPI].
Default:Mín/Máx:Unidades:
Leitura Somente–/+327671
298 [Selecao REF DPI]Gradua DPI na freqüência máxima ou velocidade máxima.
Default:Opções:
001
“Freq. Máx.”“Freq. Máx.”“Veloc. máx.”
299 [Selecao Fdbk DPI]Seleciona as unidades de DPI exibidas na linha “Fdbk” da HIM.(1) Firmware de vetor versão 3.001 e posteriores.(2) Consulte as definições de entrada/saída na
página 3-56.
Default:Opções:
17011234567891011121314151617181920-23
“Fdbk Veloc”“Freq Saida”“Comando de Freq”“Veloc comando” (1)
“Corrente de Saída”“Corr Torque”“Corr Fluxo”“Pot. de Saida”“Tensão Saída”“Tensão no Barram. CC”“Referência de PI”(2)
“Feedback de PI”“Erro de PI”“Saída de PI”“% Sobrecar Mtr”“% Sobrecar Inv”“Trq comandado”“RefCorTorqMtr”(2)
“Ref Veloc”“Fdbk Veloc”“Ref Entr. Pulso”(2)
“Reservado”“Bloco de Escala 1-4”(1)(2)
Más
c. e
Con
trole
s
276 [Mascara Logica]Determina os adaptadores que podem controlar o inversor. Se o bit para um adaptador for configurado em “0” ele não terá nenhuma função de controle, exceto para a parada.
288a297
277 [Mascara de Liga]Controla os adaptadores que podem emitir comandos de partida.
Consulte a [Mascara Logica]. 288a297
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
Vector
Vector v3
Vector v3
111 111xxxxxxxxxx10 01234567891112131415
1=Controle Permitido0=Controle com Máscarax =Reservado
No. BitValores de Fábrica dos Bits
Ent D
igita
l
Porta
DPI
1
Porta
DPI
2
Porta
DPI
3
Porta
DPI
4
Porta
DPI
5

Programação e Parâmetros 3-51
COM
UNIC
AÇÃO
Más
cara
s e
Cont
role
s
278 [Mascara de Jog]Controla os adaptadores que podem emitir comandos de jog.
Consulte a [Mascara Logica]. 288a297
279 [Mascara Direcao]Controla os adaptadores que podem emitir comandos de direção de avanço/reverso.
Consulte a [Mascara Logica]. 288 a297
280 [Mascara Refer.]Controla os adaptadores que podem selecionar uma referência alternativa; [Sel Ref Veloc A, B] ou [Veloc Pre-Progr 1-7].
Consulte a [Mascara Logica]. 288a297
281 [Mascara Acelerac]Controla os adaptadores que podem selecionar [Tempo Acelerac 1, 2].
Consulte a [Mascara Logica]. 288a297
282 [Mascara Desacele]Controla os adaptadores que podem selecionar [Tempo Desacele1, 2].
Consulte a [Mascara Logica]. 288a297
283 [Masc. Rem. Falha]Controla os adaptadores que podem remover uma falha.
Consulte a [Mascara Logica]. 288a297
284 [Mascara de MOP]Controla os adaptadores que podem emitir comandos de MOP para o inversor.
Consulte a [Mascara Logica]. 288a297
285 [Mascara Local]Controla os adaptadores que podem ter controle exclusivo dos comandos de lógica do inversor (exceto parada). O controle “local” exclusivo pode ser obtido apenas enquanto o inversor estiver parado.
Consulte a [Mascara Logica]. 288a297
288 [Controle Desliga]Os adaptadores que estão emitindo um comando de parada válido neste momento.
Leitura Somente 276a285
289 [Controle Partida]Os adaptadores que estão emitindo um comando de partida válido neste momento.
Consulte a [Controle Desliga]. 276a285
290 [Controle de JOG]Os adaptadores que estão emitindo um comando de jog válido neste momento.
Consulte a [Controle Desliga]. 276a285
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
000 100xxxxxxxxxx10 01234567891112131415
1=Emitindo Comando0=Sem Comandox =Reservado
No. Bit
Ent D
igita
l
Porta
DPI
1
Porta
DPI
2
Porta
DPI
3
Porta
DPI
4
Porta
DPI
5

3-52 Programação e Parâmetros
COMUN
ICAÇ
ÃO
Más
cara
s e
Cont
role
s
291 [Controle Direcao]O adaptador que está com controle exclusivo das mudanças de direção neste momento.
Consulte a [Controle Desliga]. 276a285
292 [Controle Referen]O adaptador que está com controle exclusivo da seleção do comando da fonte de freqüência.
Consulte a [Controle Desliga]. 276a285
293 [Controle Aceler]O adaptador que possui o controle exclusivo da seleção do [Tempo Acelerac 1, 2].
Consulte a [Controle Desliga]. 140276a285
294 [Control Desacele]O adaptador que possui o controle exclusivo da seleção do [Tempo Desacele 1, 2].
Consulte a [Controle Desliga]. 142276a285
295 [ControlRem.Falha]O adaptador que está removendo uma falha neste momento.
Consulte a [Controle Desliga]. 276a285
296 [Controle de MOP]Os adaptadores que estão emitindo acréscimos ou decréscimos na freqüência de comando do MOP.
Consulte a [Controle Desliga]. 276a285
297 [Controle Local]O adaptador que solicitou controle exclusivo de todas funções de lógica do inversor. Se um adaptador estiver com bloqueio local, todas as demais funções (exceto parada) de todos os outros adaptadores estarão bloqueadas e não operantes. O controle local pode ser obtido somente enquanto o inversor não estiver operando.
Consulte a [Controle Desliga]. 276a285
Lin
ks d
e da
dos
300301
[Dado Entrada A1] - Link A Palavra 1[Dado Entrada A2] - Link A Palavra 2Número do parâmetro cujo valor será escrito a partir de uma tabela de dados do dispositivo de comunicação.
Controle Padrão – os parâmetros que podem ser alterados somente quando o inversor estiver parado não podem ser usados com entradas de Links de Dados. A introdução de um parâmetro deste tipo irá “Desativar” o link.
Controle vetorial – não será atualizado até que o inversor esteja parado.
Consulte o manual de opções de comunicações para informações sobre links de dados.
Default:Mín/Máx:
Unidades:
0 (0 = “Desativado”) 0/3870/544 0/611 1
302303
[Dado Entrada B1] - Link B Palavra 1 [Dado Entrada B2] - Link B Palavra 2
Consulte a [Dado Entrada A1] - Link A Palavra 1 [Dado Entrada A2] - Link A Palavra 2.
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
v3

Programação e Parâmetros 3-53
Arquivo de Entradas e Saídas
COM
UNIC
AÇÃO
Link
s de
dad
os
304305
[Dado Entrada C1] - Link C Palavra 1[Dado Entrada C2] - Link C Palavra 2
Consulte a [Dado Entrada A1] - Link A Palavra 1 [Dado Entrada A2] - Link A Palavra 2.
306307
[Dado Entrada D1] - Link D Palavra 1[Dado Entrada D2] - Link D Palavra 2
Consulte a [Dado Entrada A1] - Link A Palavra 1 [Dado Entrada A2] - Link A Palavra 2.
310311
[Dado Saida A1] - Link A Palavra 1[Dado Saida A2] - Link A Palavra 2Número do parâmetro cujo valor será gravado em uma tabela de dados do dispositivo de comunicação.
Default:Mín/Máx:
Unidades:
0 (0 = “Desativado”) 0/3870/544 0/611 1
312313
[Dado Saida B1] - Link B Palavra 1[Dado Saida B2] - Link B Palavra 2
Consulte a [Dado Saida A1] - Link A Palavra 1 [Dado Saida A2] - Link A Palavra 2.
314315
[Dado Saida C1] - Link C Palavra 1[Dado Saida C2] - Link C Palavra 2
Consulte a [Dado Saida A1] - Link A Palavra 1 [Dado Saida A2] - Link A Palavra 2.
316317
[Dado Saida D1] - Link D Palavra 1[Dado Saida D2] - Link D Palavra 2
Consulte a [Dado Saida A1] - Link A Palavra 1 [Dado Saida A2] - Link A Palavra 2.
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
v3
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
ENTR
ADA
S E
SAÍD
AS
Ent
rada
s An
alóg
icas
320 [Config Entr Anlg]Seleciona o modo para as entradas analógicas.
322 325
323 326
321 [RaizQuad Ent Anl]Ativa/desativa a função raiz quadrada para cada entrada.
0xx 0xxxxxxxxxxxx10 01234567891112131415
1=Corrente0=Tensãox =Reservado
No. BitValores de Fábrica dos Bits
An1 0
=V 1=
mA
An2 0
=V 1=
mA
0xx 0xxxxxxxxxxxx10 01234567891112131415
1=Ativar0=Desativarx =Reservado
No. BitValores de Fábrica dos Bits
Ent. A
naló
g. 1
Ent. A
naló
g. 2

3-54 Programação e Parâmetros
ENTRA
DAS
E SA
ÍDA
S
Entra
das
Anal
ógic
as
322325
[Entr Anlg Sup 1][Entr Anlg Sup 2]Configura o valor de entrada mais elevado para o bloco de escala de entrada analógica x.
[Config Entr Anlg], parâmetro 320, define se esta entrada será –/+10V ou 4-20mA (0-20mA com o firmware de vetor versão 3.xxx e posteriores).
Default:
Mín/Máx:
Unidades:
10,000 Volt10,000 Volt4,000/20,000mA0/20,000mA –/+10,000V0,000/10,000V0,001mA0,001 Volt
091092
323326
[Entr Anlg Inf 1][Entr Anlg Inf 2]Configura o valor de entrada mais baixo para o bloco de escala de entrada analógica x.
[Config Entr Anlg], parâmetro 320, define se esta entrada será –/+10V ou 4-20mA (0-20mA com o firmware de vetor versão 3.xxx e posteriores).
Se configurada abaixo de 4mA, [Perda Ent Anlg x] deverá ser “Desativada”.
Default:
Mín/Máx:
Unidades:
0,000 Volt0,000 Volt4,000/20,000mA0/20,000mA –/+10,000V0,000/10,000V0,001mA0,001 Volt
091092
324327
[Perda Ent Anlg1][Perda Ent Anlg2]Seleciona a ação do inversor quando uma perda de sinal analógico for detectada. A perda de sinal é definida como um sinal analógico inferior a 1V ou 2 mA. O evento de perda de sinal termina e a operação normal reinicia quando o nível de sinal de entrada for maior o igual a 1,5V ou 3 mA.
Default:
Opções:
000123456
“Desativado”“Desativado”“Desativado”“Falha”“Manter Entrada”“Conf. Entrada Lo”“Conf. Entrada Sup”“Ir para Pré-Progr1”“Manter FreqSaí”
091092
Saí
das
Anal
ógic
as
340 [Conf Saída Analg]Seleciona o modo para as saídas analógicas.
341 [Absol Saida Anlg]Seleciona se o valor com sinal ou valor absoluto de um parâmetro é usado antes de graduar a saída analógica para o inversor.
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
v3
v3
1xx 1xxxxxxxxxxxx10 01234567891112131415
1=Corrente0=Tensãox =Reservado
No. Bit * Somente na opção com controle vetorialValores de Fábrica dos Bits
Saíd
a Ana
log
1
Saíd
a Ana
log
2 *
1xx 1xxxxxxxxxxxx10 01234567891112131415
1=Absoluto0=Com sinalx =Reservado
No. BitValores de Fábrica dos Bits
Saíd
a Ana
log
1
Saíd
a Ana
log
2 *
* Somente na opção com controle vetorial

Programação e Parâmetros 3-55
ENTR
ADA
S E
SAÍD
AS
Saíd
as A
naló
gica
s
342345
[Sel Saida Analg1] [Sel Saida Analg2]
Seleciona a fonte do valor que aciona a saída analógica.
Default:Opções:
0 “Freq Saida”Consulte a Tabela
001002003004005007006012135136137138220219
377 378
343346
[Saida Analg1 Sup] [Saida Analg2 Sup]
Configura o valor de saída analógica quando o valor da fonte estiver no máximo.
Default:Mín/Máx:
Unidades:
20,000 mA, 10,000 Volts4,000/20,000 mA0,000/20,000 mA –/+10,000V0,001 mA0,001 Volt
340342
344347
[Saida Analg1 Inf] [Saida Analg2 Inf]
Configura o valor de saída analógica quando o valor da fonte estiver no mínimo.
Default:Mín/Máx:
Unidades:
0,000 mA, 0 Volts4,000/20,000 mA0,000/20,000 mA –/+10,000V0,001 mA0,001 Volt
340342
ENTR
ADA
S E
SAÍD
AS
Saíd
as A
naló
gica
s
354355
[Esc Saída Anal1][Esc Saída Anal2]
Configura o valor superior para a faixa de escala de saída analógica. A introdução de 0,0 desativará esta escala e será usada a escala máx. Exemplo: Se [Sel Saida Analg] = “Trq Comandado”, é utilizado o valor de 150 = 150% escala em vez do default de 800%.
Default:Mín/Máx:Unidades:
0,0[Sel Saida Analóg1]0,01
377378
[Ajuste Sai Anal1][Ajuste Sai Anal2]
Configura o valor de saída analógica de um dispositivo de comunicação. Exemplo: Configure [Dado Entrada Ax] em “377” (valor do dispositivo de comunicação). Após configure [Sel Saída Analogx] em “Cont Parâm”.
Default:Mín/Máx:
Unidades:
20,000 mA, 10,000 Volts0,000/20,000 mA–/+10,000V0,001 mA0,001 Volt
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
* Somente opção com controle vetorial **Firmware de vetor versão 3.001 e posteriores(1) Consulte as definições de opções na página 3-56.
Opções
Valor da [Saida Analg1 Inf1]
Valor da [Saida Analg1 Sup]
Parâmetros 341 = Com sinal
Parâmetros 341 = Valor absoluto
011*234567891011121314*15*16*17*18*19*20-23**24**
“Freq Saida”“Comando de Freq”“Veloc comando”“Corrente de Saída”“Corr Torque”“Corr Fluxo”“Pot. de Saida”“Tensão Saída”“Tensão no Barram. CC”“Referência de PI” (1)
“Feedback de PI”“Erro de PI”“Saída de PI”“% Sobrecar Mtr”“% Sobrecar Inv”“Trq comandado”“RefCorTorqMtr” (1)
“Ref Veloc”“Fdbk Veloc”“Ref Entr. Pulso” (1)
“Est Torque”(1)
“Bloco de Escala 1-4” (1)
“Cont Parâm” (1)
–[Velocidade Max.]–[Velocidade Max.]–[Velocidade Max.]0 Amps–200% Nominal0 Amps0 kW0 Volts0 Volts–100%–100%–100%–100%0%0%–800% Nominal–200% Nominal–[Velocidade Max.]–[Velocidade Max.]–25200,0 RPM–800%
0 Hz0 Hz0 Hz/RPM0 Amps0 Amps0 Amps0 kW0 Volts0 Volts0%0%0%0%0%0%0%0%0 Hz/RPM0 Hz/RPM0 Hz/RPM0%
+[Velocidade Max.]+[Velocidade Max.]+[Velocidade Max.]200% Nominal200% Nominal200% Nominal200% Nominal120% Tensão Ent. Nominal200% Tensão Ent. Nominal100%100%100%100%100%100%800% Nominal200% Nominal+[Velocidade Max.]+[Velocidade Max.]+[Velocidade Max.]+800%
Vector
v3
Vector
v3
Vector v3
Vector v3
Vector v3
Vector v3

3-56 Programação e Parâmetros
Definições das opções selecionadas – [Sel Saida Digx], [Sel Entr Digit x], [Sel Saida Digx]
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Opção DescriçãoParâmetros relacionados
Na velocidade O estado do relé muda quando o inversor alcançar a velocidade comandada. 380
Parada Rápida Quando fechado, o inversor parará com um tempo de desaceleração de 0,1 segundo. (Se a prova de torque estiver sendo usada, será ignorada a oscilação no fim da rampa e o freio mecânico será configurado).
361
Link Excl Vincula uma entrada digital a uma saída digital se a saída estiver configurada em “Link Ent 1-6”. Não há necessidade de fazer esta seleção na opção com vetor.
361
Link Ent l-6 Quando a Saída Digital 1 estiver configurada em um desses (por exemplo, Link Entrada 3) juntamente com a Entrada Digital 3 configurada em “Link Excl”, o estado (ligado/desligado) da Entrada Digital 3 repercutirá na Saída Digital 1.
380
MicroPos Entrada de Microposicionamento. Quando fechada, a freqüência de commando é configurada em uma porcentagem da referência de velocidade conforme definida no parâmetro 611, [% Esc Micropos].
361
Des MOP Reduz a referência de velocidade enquanto a entrada estiver fechada. 361
Inc MOP Aumenta a referência de velocidade enquanto a entrada estiver fechada. 361
RefCorTorqMtr Referência da corrente de produção de torque. 342
Cont Parâm. A saída digital controlada por parâmetros permite ao PLC controlar saídas analógicas através de links de dados. Configurada em [Ajuste Sai AnalX], parâmetros 377-378.
342
Cont Parâm. A saída digital controlada por parâmetros permite ao PLC controlar saídas digitais através de links de dados. Configurada em [Pto Ajuste Saída Dig], parâmetro 379.
380
Referência de PI Referência para bloco de PI (consulte Processo PI para controle padrão na página C-13). 342
Ativ Pré-carga Força o inversor ao estado de pré-carga. Geralmente controlado por um contato auxiliar no interruptor na entrada CC para o inversor.
361
Ref Entr. Pulso Referência da entrada de pulsos (canal Z do encoder – pode ser usada enquanto os canais A e B forem entradas do encoder).
342
Bloco de Escala 1-4 Saída dos blocos de escala, parâmetros 354-355. 342
Est Torque Porcentagem calculada do torque nominal do motor. 342
Pto Ajuste Torque 1 Quando configurado, seleciona o “Pto Ajuste torque 1” para [Ref Torque A]. Caso contrário, usa o valor selecionado em [Ref Torque A].
361

Programação e Parâmetros 3-57
ENTR
ADA
S E
SAÍD
AS
Entr
adas
Dig
itais
361362363364365366
[Sel Entr Digit 1][Sel Entr Digit 2][Sel Entr Digit 3][Sel Entr Digit 4][Sel Entr Digit 5][Sel Entr Digit 6] (11)
Seleciona a função para as entradas digitais.(1) Entradas de Seleção de Velocidade.
Para acessar a Velocidade Pré-Programada 1, configure a [Sel Ref Veloc x] em “Velocidade Pré-Programada 1”. Alarmes tipo 2 – A programação de algumas entradas digitais pode causar conflitos que resultarão em um alarme Tipo 2. Exemplo: [Sel Entr Digit 1] configurado em “5, Partida” com o controle de 3 fios e [Sel Entr Digit 2] configurado em 7 “Operação” com 2 fios. Consulte a Tabela 4.C para obter informações sobre como resolver este tipo de conflito.
(2) Somente na opção com controle vetorial.
(4) Quando a [Sel Entr Digit x] for configurada na opção 2 “Remover Falhas” o botão de Parada não pode ser usado para remover uma condição de falha.
(5) Entradas típicas de 3 fios – Somente as funções de 3 fios são permitidas. A inclusão de seleções com 2 fios causará um alarme tipo 2.
Default:Default:Default:Default:Default:Default:Opções:
45181516170123456789101112131415-171819202122232425262728293031-333435363738
“Parada – CF” “Partida”“Auto/ Manual”“Sel Veloc.1”“Sel Veloc.2”“Sel Veloc.3”“Não Usado”“Ativar”(8)(10)
“Remover Falhas” (CF)(4)
“Falha Aux”“Parada – CF”(10) “Partida”(5, 9)
“Frente/Reverso” (5)
“Operação”(6, 10)
“Operação para frente” (6)
“Operação Reversa” (6)
“Jog”(5) “Jog1”(2, 5)
“Operação para frente” (6)
“Jog Reverso” (6)
“Modo Parada B”“Mod Reg Barram B”“Sel Veloc,1-3” (1)
“Auto/ Manual” (7)
“Local”“Acel2 e Desacel2”“Acelerac 2”“Desacel 2”“Inc MOP”(14)
“Dec MOP”(14)
“Link Excl” (14)
“Ativar PI”“Manter PI”“Reset PI”“Nív Perda Pot”“Ativ Pré-carga”(14)
“Sel Veloc/Trq 1-3”(2,3)
“Jog 2”(2)
“Inver PI”(12)
“Pto Ajuste Torque 1” (12,14)
“MicroPos”(12, 13, 14)
“Parada Rápida” (12, 14)
100
156162
096
141143195
194
380124
(6) Entradas típicas de 2 fios – Requer somente a seleção de funções de 2 fios. A inclusão de seleções com 3 fios causará um alarme tipo 2. Consulte a Tabela 4.C para obter informações sobre os conflitos.
(7) Auto/Manual – Consulte a Figura 1.10 na página 1-22 para obter maiores detalhes.(8) A abertura de uma entrada “Ativar” fará com que o motor diminua de velocidade até parar, ignorando
quaisquer modos de Parada programados.(9) Ocorrerá o alarme de “Conf Ent Dig B” se uma entrada de “Partida” for programada sem uma entrada de
“Parada”.(10) Consulte a declaração de atenção do modo Inativo-Ativo na página 3-36.(11) Uma entrada dedicada de ativação de hardware se encontra disponível através da seleção de um
jumper. Consulte a página 1-19 para obter maiores informações. (12) Firmware de vetor versão 3.001 e posteriores.(13) Disponível somente quando a função “Prova de Torque” estiver selecionada.(14) Consulte as definições de opções na página 3-56.
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
3 2 1Fonte de Referência Automática
00001111
00110011
01010101
Referência AReferência BVel Preset 2Vel Preset 3Vel Preset 4Vel Preset 5Vel Preset 6Vel Preset 7
(3)
3 2 1 Modo Vel/Trq
00001111
00110011
01010101
Torque zeroReg. veloc.Reg TorqueVeloc/Trq mínVeloc/Trq máx.Soma Veloc/TrqAbsolutoTorque zero

3-58 Programação e Parâmetros
ENTRA
DAS
E SA
ÍDA
S
Saí
das
Digi
tais
379 [Ajuste Sai Dig]Configura o valor de saída digital de um dispositivo de comunicação.
ExemploConfigure [Dado Entrada B1] em “379.” Os três primeiros bits deste valor determinarão o ajuste da [Sel Saida Digx] que deveria estar configurada em “30, Cont Parâm.”
380
380384388
[Sel Saida Dig 1] (5)
[Sel Saida Dig 2][Sel Saida Dig 3]
Seleciona a condição do inversor que energizará um relé de saída (CRx).
(1 ) Todo relé programado como uma falha ou alarme será energizado (iniciará a operação) quando alimentar o inversor e será desligado (desativado) quando houver uma falha ou alarme. Os relés selecionados para outras funções serão energizados apenas quando tal condição estiver presente e desligarão quando a condição for removida. Consulte as páginas 1-18 a 1-17.
(2) Somente na opção com controle vetorial.(3) O nível de ativação se encontra definido no [Nív
Saída Dig x] abaixo.(4) Firmware de vetor versão 3.001 e posteriores.(5) Quando a [ConfigProvaTrq] estiver configurada
em “Ativar”, a [Sel Saída Dig1] assume o controle do freio e todas as demais seleções serão ignoradas.
(6) Consulte as definições de opções na página 3-56.
Default:
Opções:
144123456789101112131415161718192021-2627282930
“Falha”“Operação”“Operação”“Falha”(1)
“Alarme”(1)
“Pronto”“Operação”“Operação para Frente”“Operação Reversa”“Reinício Automático”“Operação Energização”“Na Velocidade”(6)
“Na freqüência”(3)
“Na corrente”(3)
“No torque”(3)
“Na temp”(3)
“Na Tensão Barram.”(3)
“No erro de PI”(3)
“Frenagem CC” “Limit Corr”“Economizar”“Sobrec Motor”“Perda de potência”“Link Ent l-6”(6) “Ativar PI”(2)
“Manter PI”(2)
“Sobrecarga do Inversor”(2)
“Cont Parâm” (4, 6)
381 385 389382 386 390383
002001003004218012137157147053048184
379
381385389
[Niv Saida Dig 1] [Niv Saida Dig 2]
[Niv Saida Dig 3]Configura o nível de ativação de relé para as opções 10-15 na [Sel Saida Digx]. Assume-se que as unidades correspondam à seleção acima (por exemplo, “Na freqüência” = Hz, “No Torque” = Amps).
Default:
Mín/Máx:Unidades:
0,00,00,0/819,20,1
380
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector v3
00x 0xxxxxxxxxxxx10 01234567891112131415
1=Saída Energizada0=Saída Não Energizadax =Reservado
No. Bit
SaíD
ig R
ede1
SaíD
ig R
ede2
SaíD
ig R
ede3
Vector
Vector

Programação e Parâmetros 3-59
Arquivo de Aplicações
ENTR
ADA
S E
SAÍD
AS
Saíd
as D
igita
is
382386390
[TempLigSaidDig 1] [TempLigSaidDig 2]
[TempLigSaidDig 3]Configura o tempo de “Retardo LIGADO” para as saídas digitais. Este é o tempo entre a ocorrência de uma condição e a ativação do relé.
Default:
Mín/Máx:Unidades:
0,00 Seg0,00 Seg0,00/600,00 Segs0,01 Seg
380
383387391
[TempDslSaidDig 1] [TempDslSaidDig 2]
[TempDslSaidDig 3]Configura o tempo de “Retardo DESLIGADO” para as saídas digitais. Este é o tempo entre o desaparecimento de uma condição e a desativação do relé.
Default:
Mín/Máx:Unidades:
0,00 Seg0,00 Seg0,00/600,00 Segs0,01 Seg
380
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector
Vector
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
APLI
CAÇÕ
ES
Prov
a de
Tor
que
600 [ConfigProvaTrq]Ativa/desativa o recurso de prova de torque/freio. Quando “Ativado”, a [Sel Saída Dig1] assume o controle do freio. Nota: este valor não muda quando os parâmetros retornam aos valores de fábrica (página 3-40).
601 [AjusteProvaTrq]Permite controlar funções de prova de torque específicas através de um dispositivo de comunicação.
Vector v3
xxx 0xxxxxxxxxxxx10 01234567891112131415
1=Ativado0=Desativadox =Reservado
No. BitValores de Fábrica dos Bits
Ativa
r
Vector v3
0xx 0xxxxxxxxxxxx10 01234567891112131415
1=Ativado0=Desativadox =Reservado
No. BitValores de Fábrica dos Bits
Para
da R
ápid
a
MicroP
os

3-60 Programação e Parâmetros
APLIC
AÇ
ÕES
Prov
a de
Tor
que
602 [BandaDesvioVel]Define a diferença permissível entre a freqüência comandada e o valor de feedback do encoder. Ocorrerá uma falha quando a diferença ultrapassa este valor por um determinado período.
Default:
Mín/Máx:
Unidades:
2,0 Hz60,0 RPM0,1/15,0 Hz3,0/450,0 RPM0,1 Hz0,1 RPM
603
603 [IntegBandaVel]Estabelece a quantidade de tempo antes que seja emitida uma falha quando a [BandaDesvioVel] está fora de seu limite.
Default:Mín/Máx:Unidades:
60 ms1/200 ms1 ms
602
604 [TpoDestravFreio]Estabelece a quantidade de tempo entre o comando de soltar o freio e o início de aceleração da freqüência.
Default:Mín/Máx:Unidades:
0,10 Seg0,00/10,00 Segs0,01 Seg
605 [TempoOscVelZero]Estabelece a quantidade de tempo que o inversor se mantém abaixo da [TolerânciaOscil] antes da configuração do freio.
Default:Mín/Máx:Unidades:
5,0 Segs0,1/500,0 Segs0,1 Seg
606 [TolerânciaOscil]Estabelece o nível de freqüência no qual o temporizador de oscilação inicia.
Default:
Mín/Máx:
Unidades:
0,2 Hz6,0 RPM0,1/5,0 Hz3,0/150,0 RPM0,1 Hz0,1 RPM
607 [TempoAjusFreio]Define o tempo de retardo entre o comando para o ajuste do freio e o início da prova de freio.
Default:Mín/Máx:Unidades:
0,10 Seg0,00/10,00 Segs0,01 Seg
608 [TaxaVirLimTrq]Estabelece a taxa para rampa que o torque limita a zero durante a prova de freio.
Default:Mín/Máx:Unidades:
10,0 Segs0,5/300,0 Segs0,1 Seg
609 [Cont Esc Freio]Estabelece o número de contagens do encoder para definir a condição de escorregamento do freio.
Default:Mín/Máx:Unidades:
2500/655351
610 [Perc alarm freio]Estabelece o número de revoluções do eixo do motor permitidas durante o teste de escorregamento do freio. O torque do inversor é reduzido para verificar o escorregamento do freio. Caso ocorra o escorregamento, o inversor permitirá este número de revoluções do eixo do motor antes de reassumir o controle.
Default:Mín/Máx:Unidades:
1,0 Rev0,0/1000,0 Revs0,1 Rev
611 [% Esc Micropos]Estabelece a porcentagem da referência de velocidade a ser usada quando o microposicionamento tiver sido selecionado. O motor deverá parar antes que este valor tome efeito.
Default:Mín/Máx:Unidades:
10,0%0,1/100,0%0,1%
361a366
Arqu
ivo
Gru
po
No. Nome e Descrição do Parâmetro
Consulte as descrições dos símbolos na página 3-2 Valores Parâ
met
ros
rela
cion
ados
Vector v3
Vector v3
Vector v3
Vector v3
Vector v3
Vector v3
Vector v3
Vector v3
Vector v3
Vector v3

Programação e Parâmetros 3-61
metros - por Nome
Referência Cruzada de ParâNome do Parâmetro Número Grupo Página% Curva -S 146 Taxas de Rampas 3-31% Esc Micropos 611 Prova de Torque 3-60Ajuste Inferior 120 Ajuste de Velocidade 3-26Ajuste Superior 119 Ajuste de Velocidade 3-26Alarme X Inver. 211, 212 Diagnósticos 3-41Alarme X Falha 229, 230 Diagnósticos 3-45Auto-ajuste 61 Atributos de Torque 3-17Auto-ajust inérc 67 Atributos de Torque 3-18Auto-ajuste trq 66 Atributos de Torque 3-18BandaDesvioVel 602 Prova de Torque 3-60Banda Inib freq 87 Modo & Lim Veloc 3-23Canal Z Encoder 423 Feedback de velocidade 3-21Carregar do Conj. Usuário
198 Memória do Inversor 3-40
Checksum Inv 203 Memória do Inversor 3-41Classe Tensão 202 Memória do Inversor 3-40Código Alarme X 262-269 Alarmes 3-47Codigo Falha 1 243 Falhas 3-46Codigo Falha 2 245 Falhas 3-46Codigo Falha 3 247 Falhas 3-46Codigo Falha 4 249 Falhas 3-46Codigo Falha 5 251 Falhas 3-46Codigo Falha 6 253 Falhas 3-46Codigo Falha 7 255 Falhas 3-46Codigo Falha 8 257 Falhas 3-46Compensacao 56 Atributos de Torque 3-16Config Alarme 1 259 Alarmes 3-47Config Entr Anlg 320 Entradas Analógicas 3-53Config Falha 1 238 Falhas 3-46ConfigProvaTrq 600 Prova de Torque 3-59Conf Saída Analg 340 Saídas Analógicas 3-54AjusteProvaTrq 601 Prova de Torque 3-59Config PI 124 Processo PI 3-27Cont Esc Freio 609 Prova de Torque 3-60Cont. Sbrcor Inv 219 Diagnósticos 3-43Cont. Sobrec mot 220 Diagnósticos 3-44ControlRem.Falha 295 Máscaras e Controles 3-52Controle Aceler 293 Máscaras e Controles 3-52Controle de JOG 290 Máscaras e Controles 3-51Controle de MOP 296 Máscaras e Controles 3-52Controle do PI 125 Processo PI 3-27Controle Desacele 294 Máscaras e Controles 3-52Controle Desliga 288 Máscaras e Controles 3-51Controle Direcao 291 Máscaras e Controles 3-52Controle Local 297 Máscaras e Controles 3-52Controle Partida 289 Máscaras e Controles 3-51Controle Referen 292 Máscaras e Controles 3-52Falha Corrente 225 Diagnósticos 3-44Corrente Fluxo 5 Medição 3-12Corrente Saida 3 Medição 3-12Corrente Torque 4 Medição 3-12Corrente Nominal 28 Dados do Inversor 3-14Amps Mtr ID. 42 Dados do Motor 3-14Dados Entrada XX 300-307 Links de dados 3-52DadoPonto TesteX 235, 237 Diagnósticos 3-45Dado Saida XX 310-317 Links de dados 3-53Div Ref Torque A 430 Atributos de Torque 3-18Entr Anlg Sup X 322, 325 Entradas Analógicas 3-54Esc.1 Ent. Inf. 478-496 Blocos de escala 3-48Esc.X Ent. Sup. 477-495 Blocos de escala 3-48
Entr Anlg Inf X 323, 326 Entradas Analógicas 3-54Escala Ent Pulso 422 Feedback de velocidade 3-21Esc Saída AnalX 354, 355 Saídas Analógicas 3-55Escor RPM@ I.nom 121 Compensação de
Escorregamento3-26
Fator Pot. Saida 8 Medição 3-12Fator sobrec mtr 48 Dados do Motor 3-15FD parado 145 Modos de Parada/
Frenagem3-32
Feedback Pos Enc 414 Feedback de velocidade 3-20Feedback de velocidade 25 Medição 3-13Feedback PI inf 463 Processo PI 3-29Feedback PI sup 462 Processo PI 3-29Filtro boost SV 59 Atributos de Torque 3-16Filtro LBPI 139 Processo PI 3-29Fonte Ref Veloc 213 Diagnósticos 3-42Fonte Ult Parada 215 Diagnósticos 3-43Fluxo de Fren. 166 Modos de Parada/
Frenagem3-34
Freq Comandada 2 Medição 3-12Freq Filtro Ent. 419 Feedback de velocidade 3-20Freq MOP 11 Medição 3-13Hettz Mtr ID. 43 Dados do Motor 3-14Freq Saida 1 Medição 3-12Freq. de Quebra 72 Volts por Hertz 3-20Freq. Maxima 55 Atributos de Torque 3-16Freqüência de Falha 224 Diagnósticos 3-44Frequencia PMW 151 Limites de Carga 3-31Tipo Sobrec Mtr 47 Dados do Motor 3-15Ganho Comp. Esc. 122 Compensação de
Escorregamento3-26
Ganho Limite Corr 149 Limites de Carga 3-31Ganho Part Movim 170 Modos de Reinicialização 3-35Ganho Prop PI 130 Processo PI 3-28Grava Refer HIM 192 Config Ref HIM 3-39Grava Refer. MOP 194 Config MOP 3-39Grava Cnfg Usuar 199 Memória do Inversor 3-40Idioma 201 Memória do Inversor 3-40Inércia Total 450 Regulador de velocidade 3-30Inib Partida 214 Diagnósticos 3-42Inibição Freq X 84-86 Modo & Lim Veloc 3-23IntegBandaVel 603 Prova de Torque 3-60K Filtro Entalhe 420 Feedback de velocidade 3-21Kd Reg Barram 165 Modos de Parada/
Frenagem3-34
Ki Reg Barram 160 Modos de Parada/Frenagem
3-33
Kp Reg Barram 164 Modos de Parada/Frenagem
3-34
kW Nominal 26 Dados do Inversor 3-14kWh consumido 14 Medição 3-13LB desejada vel. 449 Regulador de velocidade 3-30Limite Sobrevel 83 Modo & Lim Veloc 3-22Lim. força regen 153 Limites de Carga 3-32Limite Inf PI 131 Processo PI 3-28Limite Sup de PI 132 Processo PI 3-28Lim. taxa corr. 154 Limites de Carga 3-32Limite Trq Neg 437 Atributos de Torque 3-19Limite Trq Pos 436 Atributos de Torque 3-19Limite veloc rev 454 Regulador de velocidade 3-23Loop veloc. Kf 447 Regulador de velocidade 3-30
Nome do Parâmetro Número Grupo Página

3-62 Programação e Parâmetros
Loop veloc. Ki 445 Regulador de velocidade 3-29Loop veloc. Kp 446 Regulador de velocidade 3-30Marcad Energizaç 242 Falhas 3-46Mascara Acelerac 281 Máscaras e Controles 3-51Mascara de Jog 278 Máscaras e Controles 3-51Mascara de Liga 277 Máscaras e Controles 3-50Mascara de MOP 284 Máscaras e Controles 3-51Mascara Desacele 282 Máscaras e Controles 3-51Mascara Direcao 279 Máscaras e Controles 3-51Mascara Local 285 Máscaras e Controles 3-51Mascara Logica 276 Máscaras e Controles 3-50Mascara Refer. 280 Máscaras e Controles 3-51Masc. Rem. Falha 283 Máscaras e Controles 3-51Medidor Erro PI 137 Processo PI 3-29Medidor Fdback PI 136 Processo PI 3-28Medid vel circ 451 Regulador de velocidade 3-30Medidor Refer PI 135 Processo PI 3-28Medid RPM Escorr 123 Compensação de
Escorregamento3-26
Medidor Saida PI 138 Processo PI 3-29Mem. Barram CC 13 Medição 3-13Speed/Torque Mod 88 Modo & Lim Veloc 3-23Modo Desemp. Trq 53 Atributos de Torque 3-15Modo Direcao 190 Configuração de Direção 3-38Modo Fluxo 57 Atributos de Torque 3-16Modo ativ-inativ 178 Modos de Reinicialização 3-36Modo Parada X 155, 156 Modos de Parada/
Frenagem3-32
Modo Parada/FREN X 155, 156 Modos de Parada/Frenagem
3-32
Modo Perda Pot 184 Perda de potência 3-37Mod Reg Barram X 161, 162 Modos de Parada/
Frenagem3-33
Modo Remoc Falha 241 Falhas 3-46Modo Sobrecar Inv 150 Limites de Carga 3-31Modo Velocidade 80 Modo & Lim Veloc 3-22Mult Ref Trq B 434 Atributos de Torque 3-18MWh decorrido 9 Medição 3-12Niv Aces Param 196 Memória do Inversor 3-39Niv Saida Dig X 381,
385, 389Saídas Digitais 3-58
Nível Adv Terra 177 Perda de potência 3-37Nív. ativ-inativ 180 Modos de Reinicialização 3-37Nível perda Pot 186 Perda de potência 3-38Nivel Fren CC 158 Modos de Parada/
Frenagem3-33
Nivelinativo 182 Modos de Reinicialização 3-37Nív Perda Carga 187 Perda de potência 3-38Partid Mov Ativ 169 Modos de Reinicialização 3-35Partida Energiz 168 Modos de Reinicialização 3-34Perc alarm freio 610 Prova de Torque 3-60Perda Ent Anlg X 324, 327 Entradas Analógicas 3-54Polos motor 49 Dados do Motor 3-15Pto ajuste trq 435 Atributos de Torque 3-19Pto ajuste trq 2 438 Atributos de Torque 3-19Refer % Ajuste 116 Ajuste de Velocidade 3-26Pot. de Saida 7 Medição 3-12Potência Mtr ID. 45 Dados do Motor 3-15PPR Encoder 413 Feedback de velocidade 3-20Pre-cargaREFMan 193 Config Ref HIM 3-39Pre-Carga do PI 133 Processo PI 3-28Ajuste Sai AnalX 377, 378 Saídas Analógicas 3-55Ajuste Sai Dig 379 Saídas Digitais 3-58Pulso Marcador 421 Feedback de velocidade 3-21Queda RPM @ Inom 152 Limites de Carga 3-32
Nome do Parâmetro Número Grupo Página
Queda tens indut 64 Atributos de Torque 3-17Queda tensão RI 62 Atributos de Torque 3-17RaizQuad Ent Anl 321 Entradas Analógicas 3-53Ref. Corr. Trq 441 Atributos de Torque 3-19Ref Inf Trq X 429, 433 Atributos de Torque 3-18Ref Infer Man BT 98 Referência de velocidade 3-25Ref Infer Vel X 92, 95 Referência de velocidade 3-24Ref Sup Trq X 428, 432 Atributos de Torque 3-18Ref Super Man BT 97 Referência de velocidade 3-25Ref Super Vel X 91, 94 Referência de velocidade 3-24Ref. ent. pulso 99 Referência de velocidade 3-25Ref ativ- inativ 179 Modos de Reinicialização 3-37Referên. PI inf. 461 Processo PI 3-29Referên. PI sup. 460 Processo PI 3-29Refer do PI 127 Processo PI 3-27Refer.Corr.Fluxo 63 Atributos de Torque 3-17Ref. velocidade 23 Medição 3-13Referência MOP 11 Medição 3-13Ref. Operacao 70 Volts por Hertz 3-19Ref. Part./Acel 69 Volts por Hertz 3-19Remoção Alarme 261 Alarmes 3-47Remocao Falha 240 Falhas 3-46Reset Medid 200 Memória do Inversor 3-40Res Logic Inver 271 Controle de Comun. 3-49Res. Rampa Inver 273 Controle de Comun. 3-49Res. Ref. Inver 272 Controle de Comun. 3-49Retardo Energiz 167 Modos de Reinicialização 3-34Temp entre tent 175 Modos de Reinicialização 3-35RPM Mtr ID. 44 Dados do Motor 3-14Saida AnalgX Inf 344, 347 Saídas Analógicas 3-55Saida AnalgX Sup 343, 346 Saídas Analógicas 3-55Absol Saida Anlg 341 Saídas Analógicas 3-54Esc.X Saída Inf. 480-498 Blocos de escala 3-48Esc.1 Saída Sup. 479-497 Blocos de escala 3-48Modo Desemp. Trq 53 Atributos de Torque 3-15Sel Entr Digit X 361-366 Entradas Digitais 3-57Sel Feedback PI 128 Processo PI 3-28Sel Filtro Fdbk 416 Feedback de velocidade 3-20Sel Limite Corr 147 Limites de Carga 3-31SelNivel Fren CC 157 Modos de Parada/Frenagem3-32
Sel Ponto TesteX 234, 236 Diagnósticos 3-45Sel Ref Man BT 96 Referência de velocidade 3-25Ref Torque X 427, 431 Atributos de Torque 3-18Sel Ref Veloc X 90, 93 Referência de velocidade 3-24Sel Refer de PI 126 Processo PI 3-27Sel Said Ajuste 118 Ajuste de Velocidade 3-26Sel Saida AnalgX 342, 345 Saídas Analógicas 3-55Sel Saida Dig X 380,
384, 388Saídas Digitais 3-58
Selec Ent Ajuste 117 Ajuste de Velocidade 3-26Selecao Fdbk DPI 299 Controle de Comun. 3-50Modo Velocidade 80 Modo & Lim Veloc 3-22Seleção Porta DPI 274 Controle de Comun. 3-50Selecao REF DPI 298 Controle de Comun. 3-50Status controle 440 Atributos de Torque 3-19Status do PI 134 Processo PI 3-28Status Ent Dig 216 Diagnósticos 3-43Status Falha X 227, 228 Diagnósticos 3-44Status InversorX 209, 210 Diagnósticos 3-41Status Saida Dig 217 Diagnósticos 3-43Taxa Dados DPI 270 Controle de Comun. 3-49Taxa de Transmissão de Dados DPI
270 Controle de Comun. 3-49
Nome do Parâmetro Número Grupo Página

Programação e Parâmetros 3-63
Taxa MOP 195 Config MOP 3-39TaxaVirLimTrq 608 Prova de Torque 3-60Temp Inv 218 Diagnósticos 3-43TempDslSaidDig X 383,
387, 391Saídas Digitais 3-59
TempLigSaidDig X 382, 386, 390
Saídas Digitais 3-59
Tempo Acelerac X 140, 141 Taxas de Rampas 3-31TempoAjusFreio 607 Prova de Torque 3-60Tempo ativo 181 Modos de Reinicialização 3-37Tempo funcionam. 10 Medição 3-12TempoPerdaCarga 188 Perda de potência 3-38Tempo deriv PI 459 Processo PI 3-29Tempo Desacele X 142, 143 Taxas de Rampas 3-31TpoDestravFreio 604 Prova de Torque 3-60Tempo PinoProt 189 Perda de potência 3-38Tempo Falha 1 244 Falhas 3-47Tempo Falha 2 246 Falhas 3-47Tempo Falha 3 248 Falhas 3-47Tempo Falha 4 250 Falhas 3-47Tempo Falha 5 252 Falhas 3-47Tempo Falha 6 254 Falhas 3-47Tempo Falha 7 256 Falhas 3-47Tempo Falha 8 258 Falhas 3-47Tempo Fluxo 58 Atributos de Torque 3-16Tempo Fren CC 159 Modos de Parada/
Frenagem3-33
Tempo inativo 183 Modos de Reinicialização 3-37Tempo Integr PI 129 Processo PI 3-28Tempo Perda Pot 185 Perda de potência 3-37TempoOscVelZero 605 Prova de Torque 3-60Tensão de Quebra 71 Volts por Hertz 3-20Tensão de Saida 6 Medição 3-12FalhaTens Barram 226 Diagnósticos 3-44Tensão Maxima 54 Atributos de Torque 3-15Tensão no Barramento CC
12 Medição 3-13
Tensão Nominal 27 Dados do Inversor 3-14Volts Mtr ID. 41 Dados do Motor 3-14Tent ReinAut 174 Modos de Reinicialização 3-35Tipo do Motor 40 Dados do Motor 3-14Tipo Fdbk motor 412 Feedback de velocidade 3-20Tipo Resistor FD 163 Modos de Parada/
Frenagem3-34
TolerânciaOscil 606 Prova de Torque 3-60Torque comandado 24 Medição 3-13Speed Units 79 Modo & Lim Veloc 3-21Unid Pot Mtr ID. 46 Dados do Motor 3-15Val Limite Corr 148 Limites de Carga 3-31Esc.X Valor Ent. 476-494 Blocos de escala 3-48Val. Ent. Anal 1 16 Medição 3-13Val. Ent. Anal 2 17 Medição 3-13Valor Porta DPI 275 Controle de Comun. 3-50Esc.X ValorSaída 481-499 Blocos de escala 3-48Vel Preset X 101-107 Velocidades Discretas 3-25Veloc. de Jog 100 Velocidades Discretas 3-25Veloc. de Jog 1 100 Velocidades Discretas 3-25Veloc. de Jog 2 108 Velocidades Discretas 3-25Freq Comandada 2 Medição 3-12Veloc. Encoder 415 Feedback de velocidade 3-20
Nome do Parâmetro Número Grupo Página
Velocidade falha 224 Diagnósticos 3-44Velocidade Max. 82 Modo & Lim Veloc 3-22Veloc Minima 81 Modo & Lim Veloc 3-22Veloc. rampeada 22 Medição 3-13Versão SFW 29 Dados do Inversor 3-14Volta p/ Default 197 Memória do Inversor 3-40Nome do Parâmetro Número Grupo Página

3-64 Programação e Parâmetros
metros - por Número
Referência Cruzada de ParâNúmero Nome do Parâmetro Grupo Página1 Freq Saida Medição 3-122 Freq Comandada Medição 3-12
Velocidade comandada Medição3 Corrente Saida Medição 3-124 Corrente Torque Medição 3-125 Corrente Fluxo Medição 3-126 Tensão de Saida Medição 3-127 Pot. de Saida Medição 3-128 Fator Pot. Saida Medição 3-129 MWh decorrido Medição 3-1210 Tempo funcionam. Medição 3-1211 Freq MOP Medição 3-13
Referência MOP Medição12 Tensão Barram CC Medição 3-1313 Mem. Barram CC Medição 3-1314 kWh consumido Medição 3-1316 Val. Ent. Anal 1 Medição 3-1317 Val. Ent. Anal 2 Medição 3-1322 Veloc. rampeada Medição 3-1323 Ref. velocidade Medição 3-1324 Torque comandado Medição 3-1325 Feedback veloc. Medição 3-1326 kW Nominal Dados do Inversor 3-1427 Tensão Nominal Dados do Inversor 3-1428 Corrente Nominal Dados do Inversor 3-1429 Versão SFW Dados do Inversor 3-1440 Tipo do Motor Dados do Motor 3-1441 Volts Mtr ID. Dados do Motor 3-1442 Amps Mtr ID. Dados do Motor 3-1443 Hettz Mtr ID. Dados do Motor 3-1444 RPM Mtr ID. Dados do Motor 3-1445 Potência Mtr ID. Dados do Motor 3-1546 Unid Pot Mtr ID. Dados do Motor 3-1547 Tipo Sobrec Mtr Dados do Motor 3-1548 Fator sobrec mtr Dados do Motor 3-1549 Polos motor Dados do Motor 3-1553 Modo Desemp. Trq Atributos de Torque 3-15
Sel Contr Motor Atributos de Torque54 Tensão Maxima Atributos de Torque 3-1555 Freq. Maxima Atributos de Torque 3-1656 Compensacao Atributos de Torque 3-1657 Modo Fluxo Atributos de Torque 3-1658 Tempo Fluxo Atributos de Torque 3-1659 Filtro boost SV Atributos de Torque 3-1661 Auto-ajuste Atributos de Torque 3-1762 Queda tensão RI Atributos de Torque 3-1763 Refer.Corr.Fluxo Atributos de Torque 3-1764 Queda tens indut Atributos de Torque 3-1766 Auto-ajuste trq Atributos de Torque 3-1867 Auto-ajust inérc Atributos de Torque 3-1869 Ref. Part./Acel Volts por Hertz 3-1970 Ref. Operacao Volts por Hertz 3-1971 Tensão de Quebra Volts por Hertz 3-2072 Freq. de Quebra Volts por Hertz 3-2079 Speed Units Modo & Lim Veloc 3-2180 Modo Velocidade Modo & Lim Veloc 3-22
Sel Feedback Modo & Lim Veloc81 Veloc Minima Modo & Lim Veloc 3-22
82 Velocidade Max. Modo & Lim Veloc 3-2283 Limite Sobrevel Modo & Lim Veloc 3-2284-86 Inibição Freq X Modo & Lim Veloc 3-2387 Banda Inib freq Modo & Lim Veloc 3-2388 Speed/Torque Mod Modo & Lim Veloc 3-2390, 93 Sel Ref Veloc X Referência de velocidade 3-2491, 94 Ref Super Vel X Referência de velocidade 3-2492, 95 Ref Infer Vel X Referência de velocidade 3-2496 Sel Ref Man BT Referência de velocidade 3-2597 Ref Super Man BT Referência de velocidade 3-2598 Ref Infer Man BT Referência de velocidade 3-2599 Ref. ent. pulso Referência de velocidade 3-25100 Veloc. de Jog Velocidades Discretas 3-25
Veloc. de Jog 1 Velocidades Discretas101-107 Vel Preset X Velocidades Discretas 3-25108 Veloc. de Jog 2 Velocidades Discretas 3-25116 Refer % Ajuste Ajuste de Velocidade 3-26117 Selec Ent Ajuste Ajuste de Velocidade 3-26118 Sel Said Ajuste Ajuste de Velocidade 3-26119 Ajuste Superior Ajuste de Velocidade 3-26120 Ajuste Inferior Ajuste de Velocidade 3-26121 Escor RPM@ I.nom Compensação de
Escorregamento3-26
122 Ganho Comp. Esc. Compensação de Escorregamento
3-26
123 Medid RPM Escorr Compensação de Escorregamento
3-26
124 Config PI Processo PI 3-27125 Controle do PI Processo PI 3-27126 Sel Refer de PI Processo PI 3-27127 Refer do PI Processo PI 3-27128 Sel Feedback PI Processo PI 3-28129 Tempo Integr PI Processo PI 3-28130 Ganho Prop PI Processo PI 3-28131 Limite Inf PI Processo PI 3-28132 Limite Sup de PI Processo PI 3-28133 Pre-Carga do PI Processo PI 3-28134 Status do PI Processo PI 3-28135 Medidor Refer PI Processo PI 3-28136 Medidor Fdback PI Processo PI 3-28137 Medidor Erro PI Processo PI 3-29138 Medidor Saida PI Processo PI 3-29139 Filtro LBPI Processo PI 3-29140, 141 Tempo Acelerac X Taxas de Rampas 3-31142, 143 Tempo Desacele X Taxas de Rampas 3-31145 FD parado Modos de Parada/Frenagem 3-32146 % Curva -S Taxas de Rampas 3-31147 Sel Limite Corr Limites de Carga 3-31148 Val Limite Corr Limites de Carga 3-31149 Ganho Limite Corr Limites de Carga 3-31150 Modo Sobrecar Inv Limites de Carga 3-31151 Frequencia PMW Limites de Carga 3-31152 Queda RPM @ Inom Limites de Carga 3-32153 Lim. força regen Limites de Carga 3-32154 Lim. taxa corr. Limites de Carga 3-32155, 156 Modo Parada X Modos de Parada/Frenagem 3-32
Modo Par/Fren X Modos de Parada/Frenagem157 SelNivel Fren CC Modos de Parada/Frenagem 3-32158 Nivel Fren CC Modos de Parada/Frenagem 3-33
Número Nome do Parâmetro Grupo Página

Programação e Parâmetros 3-65
159 Tempo Fren CC Modos de Parada/Frenagem 3-33160 Ki Reg Barram Modos de Parada/Frenagem 3-33161, 162 Mod Reg Barram X Modos de Parada/Frenagem 3-33163 Tipo Resistor FD Modos de Parada/Frenagem 3-34164 Kp Reg Barram Modos de Parada/Frenagem 3-34165 Kd Reg Barram Modos de Parada/Frenagem 3-34166 Fluxo de Fren. Modos de Parada/Frenagem 3-34167 Retardo Energiz Modos de Reinicialização 3-34168 Partida Energiz Modos de Reinicialização 3-34169 Partid Mov Ativ Modos de Reinicialização 3-35170 Ganho Part Movim Modos de Reinicialização 3-35174 Tent ReinAut Modos de Reinicialização 3-35175 Temp entre tent Modos de Reinicialização 3-35177 Nível Adv Terra Perda de potência 3-37178 Modo ativ-inativ Modos de Reinicialização 3-36179 Ref ativ- inativ Modos de Reinicialização 3-37180 Nív. ativ-inativ Modos de Reinicialização 3-37181 Tempo ativo Modos de Reinicialização 3-37182 Nivelinativo Modos de Reinicialização 3-37183 Tempo inativo Modos de Reinicialização 3-37184 Modo Perda Pot Perda de potência 3-37185 Tempo Perda Pot Perda de potência 3-37186 Nível perda Pot Perda de potência 3-38187 Nív Perda Carga Perda de potência 3-38188 TempoPerdaCarga Perda de potência 3-38189 Tempo PinoProt Perda de potência 3-38190 Modo Direcao Configuração de Direção 3-38192 Grava Refer HIM Config Ref HIM 3-39193 Pre-cargaREFMan Config Ref HIM 3-39194 Grava Refer. MOP Config MOP 3-39195 Taxa MOP Config MOP 3-39196 Niv Aces Param Memória do Inversor 3-39197 Volta p/ Default Memória do Inversor 3-40198 Carreg Cfg Usuar Memória do Inversor 3-40199 Grava Cnfg Usuar Memória do Inversor 3-40200 Reset Medid Memória do Inversor 3-40201 Idioma Memória do Inversor 3-40202 Classe Tensão Memória do Inversor 3-40203 Checksum Inv Memória do Inversor 3-41209, 210 Status InversorX Diagnósticos 3-41211, 212 Alarme X Inver. Diagnósticos 3-41213 Fonte Ref Veloc Diagnósticos 3-42214 Inib Partida Diagnósticos 3-42215 Fonte Ult Parada Diagnósticos 3-43216 Status Ent Dig Diagnósticos 3-43217 Status Saida Dig Diagnósticos 3-43218 Temp Inv Diagnósticos 3-43219 Cont. Sbrcor Inv Diagnósticos 3-43220 Cont. Sobrec mot Diagnósticos 3-44224 Freqüência de Falha Diagnósticos 3-44
Velocidade falha Diagnósticos225 Falha Corrente Diagnósticos 3-44226 FalhaTens Barram Diagnósticos 3-44227, 228 Status Falha X Diagnósticos 3-44229, 230 Alarme X Falha Diagnósticos 3-45234, 236 Sel Ponto TesteX Diagnósticos 3-45235, 237 DadoPonto TesteX Diagnósticos 3-45238 Config Falha 1 Falhas 3-46240 Remocao Falha Falhas 3-46241 Modo Remoc Falha Falhas 3-46242 Marcad Energizaç Falhas 3-46243 Codigo Falha 1 Falhas 3-46244 Tempo Falha 1 Falhas 3-47245 Codigo Falha 2 Falhas 3-46246 Tempo Falha 2 Falhas 3-47247 Codigo Falha 3 Falhas 3-46
Número Nome do Parâmetro Grupo Página
248 Tempo Falha 3 Falhas 3-47249 Codigo Falha 4 Falhas 3-46250 Tempo Falha 4 Falhas 3-47251 Codigo Falha 5 Falhas 3-46252 Tempo Falha 5 Falhas 3-47253 Codigo Falha 6 Falhas 3-46254 Tempo Falha 6 Falhas 3-47255 Codigo Falha 7 Falhas 3-46256 Tempo Falha 7 Falhas 3-47257 Codigo Falha 8 Falhas 3-46258 Tempo Falha 8 Falhas 3-47259 Config Alarme 1 Alarmes 3-47261 Remoção Alarme Alarmes 3-47262-269 Código Alarme X Alarmes 3-47270 Taxa Dados DPI Controle de Comun. 3-49Taxa de Transmissão de Dados DPI
Controle de Comun.
271 Res Logic Inver Controle de Comun. 3-49272 Res. Ref. Inver Controle de Comun. 3-49273 Res. Rampa Inver Controle de Comun. 3-49274 Seleção Porta DPI Controle de Comun. 3-50275 Valor Porta DPI Controle de Comun. 3-50276 Mascara Logica Máscaras e Controles 3-50277 Mascara de Liga Máscaras e Controles 3-50278 Mascara de Jog Máscaras e Controles 3-51279 Mascara Direcao Máscaras e Controles 3-51280 Mascara Refer. Máscaras e Controles 3-51281 Mascara Acelerac Máscaras e Controles 3-51282 Mascara Desacele Máscaras e Controles 3-51283 Masc. Rem. Falha Máscaras e Controles 3-51284 Mascara de MOP Máscaras e Controles 3-51285 Mascara Local Máscaras e Controles 3-51288 Controle Desliga Máscaras e Controles 3-51289 Controle Partida Máscaras e Controles 3-51290 Controle de JOG Máscaras e Controles 3-51291 Controle Direcao Máscaras e Controles 3-52292 Controle Referen Máscaras e Controles 3-52293 Controle Aceler Máscaras e Controles 3-52294 Controle Desacele Máscaras e Controles 3-52295 ControlRem.Falha Máscaras e Controles 3-52296 Controle de MOP Máscaras e Controles 3-52297 Controle Local Máscaras e Controles 3-52298 Selecao REF DPI Controle de Comun. 3-50299 Selecao Fdbk DPI Controle de Comun. 3-50300-307 Dados Entrada XX Links de dados 3-52310-317 Dado Saida XX Links de dados 3-53320 Config Entr Anlg Entradas Analógicas 3-53321 RaizQuad Ent Anl Entradas Analógicas 3-53322, 325 Entr Anlg Sup X Entradas Analógicas 3-54323, 326 Entr Anlg Inf X Entradas Analógicas 3-54324, 327 Perda Ent Anlg X Entradas Analógicas 3-54340 Conf Saída Analg Saídas Analógicas 3-54341 Absol Saida Anlg Saídas Analógicas 3-54342, 345 Sel Saida AnalgX Saídas Analógicas 3-55343, 346 Saida AnalgX Sup Saídas Analógicas 3-55344, 347 Saida AnalgX Inf Saídas Analógicas 3-55354, 355 Esc Saída AnalX Saídas Analógicas 3-55361-366 Sel Entr Digit X Entradas Digitais 3-57377, 378 Ajuste Sai AnalX Saídas Analógicas 3-55379 Ajuste Sai Dig Saídas Digitais 3-58380, 384, 388
Sel Saida Dig X Saídas Digitais 3-58
381, 385, 389
Niv Saida Dig X Saídas Digitais 3-58
382, 386, 390
TempLigSaidDig X Saídas Digitais 3-59
Número Nome do Parâmetro Grupo Página

3-66 Programação e Parâmetros
383, 387, 391
TempDslSaidDig X Saídas Digitais 3-59
412 Tipo Fdbk motor Feedback de velocidade 3-20413 PPR Encoder Feedback de velocidade 3-20414 Feedback Pos Enc Feedback de velocidade 3-20415 Veloc. Encoder Feedback de velocidade 3-20416 Sel Filtro Fdbk Feedback de velocidade 3-20419 Freq Filtro Ent. Feedback de velocidade 3-20420 K Filtro Entalhe Feedback de velocidade 3-21421 Pulso Marcador Feedback de velocidade 3-21422 Escala Ent Pulso Feedback de velocidade 3-21423 Canal Z Encoder Feedback de velocidade 3-21427, 431 Ref Torque X Atributos de Torque 3-18428, 432 Ref Sup Trq X Atributos de Torque 3-18429, 433 Ref Inf Trq X Atributos de Torque 3-18430 Div Ref Torque A Atributos de Torque 3-18434 Mult Ref Trq B Atributos de Torque 3-18435 Pto ajuste trq Atributos de Torque 3-19436 Limite Trq Pos Atributos de Torque 3-19437 Limite Trq Neg Atributos de Torque 3-19438 Pto ajuste trq 2 Atributos de Torque 3-19440 Status controle Atributos de Torque 3-19441 Ref. Corr. Trq Atributos de Torque 3-19445 Loop veloc. Ki Regulador de velocidade 3-29446 Loop veloc. Kp Regulador de velocidade 3-30447 Loop veloc. Kf Regulador de velocidade 3-30449 LB desejada vel. Regulador de velocidade 3-30450 Inércia Total Regulador de velocidade 3-30451 Medid vel circ Regulador de velocidade 3-30454 Limite veloc rev Regulador de velocidade 3-23459 Tempo deriv PI Processo PI 3-29460 Referên. PI sup. Processo PI 3-29461 Referên. PI inf. Processo PI 3-29462 Feedback PI sup Processo PI 3-29463 Feedback PI inf Processo PI 3-29476-494 Esc.X Valor Ent. Blocos de escala 3-48477-495 Esc.X Ent. Sup. Blocos de escala 3-48478-496 Esc.1 Ent. Inf. Blocos de escala 3-48479-497 Esc.1 Saída Sup. Blocos de escala 3-48480-498 Esc.X Saída Inf. Blocos de escala 3-48481-499 Esc.X ValorSaída Blocos de escala 3-48600 ConfigProvaTrq Prova de Torque 3-59601 AjusteProvaTrq Prova de Torque 3-59602 BandaDesvioVel Prova de Torque 3-60603 IntegBandaVel Prova de Torque 3-60604 TpoDestravFreio Prova de Torque 3-60605 TempoOscVelZero Prova de Torque 3-60606 TolerânciaOscil Prova de Torque 3-60607 TempoAjusFreio Prova de Torque 3-60608 TaxaVirLimTrq Prova de Torque 3-60609 Cont Esc Freio Prova de Torque 3-60610 Perc alarm freio Prova de Torque 3-60611 % Esc Micropos Prova de Torque 3-60
Número Nome do Parâmetro Grupo Página

Capítulo 4
Identificação e Solução de Problemas
O Capítulo 4 fornece informações para orientá-lo na identificação e solução de problemas do PowerFlex 700. Ele inclui uma lista e descrição de alarmes e falhas (com possíveis soluções, quando aplicável) do inversor.
A falha é uma condição que pára o inversor. Há três tipos de falhas.
O alarme é uma condição que, se não for tratada, pode parar o inversor. Há dois tipos de alarmes.
Para informações sobre...Consulte a página...
Falhas e Alarmes 4-1
Status do Inversor 4-2
Remoção Manual das Falhas 4-4
Descrições das Falhas 4-4
Remoção de Alarmes 4-9
Descrições dos Alarmes 4-10
Sintomas Comuns e Ações Corretivas 4-13
Funções e Códigos de Pontos de Teste 4-16
Falhas e Alarmes
Tipo Descrição da Falha
➀ Operação Auto-Reset
Quando este tipo de falha ocorre e [Tent ReinAut] (consulte página 3-35) estiver configurado em um valor superior a “0” um temporizador configurável pelo usuário, [Temp entre tent] (consulte a página 3-35) é iniciado. Quanto o temporizador atingir zero, o inversor tenta fazer o reset da falha automaticamente. Se a condição que causou a falha não estiver mais presente, será feito o reset da falha e o inversor reiniciará.
➁ Não-Reconfigurável Esse tipo de falha geralmente exige reparos no motor ou inversor. A causa da falha deve ser corrigida antes que ela seja removida. O reset da falha será feito na energização após o reparo.
➂ Configurável pelo Usuário
Essas falhas podem ser ativadas/desativadas para anunciar ou ignorar uma condição de falha.
Tipo Descrição do Alarme
➀ Configurável pelo Usuário
Esses alarmes podem ser ativados ou desativados pelo [Config Alarme 1] na página 3-47.
➁ Não-Reconfigurável Esses alarmes estão sempre ativados.

4-2 Identificação e Solução de Problemas
A condição ou estado do seu inversor é monitorada constantemente. Quaisquer alterações serão indicadas pelos LEDs e/ou pela HIM (se houver).
Indicações da LED do painel dianteiro
Figura 4.1 Indicadores Típicos do Status do Inversor
Status do Inversor
➊
➋Esc
7 8 9
4 5 6
1 2 3
. 0 +/-
Sel
Jog
Alt
POWER
STS
PORT
MOD
NET A
NET B
Exp Param #
S.M.A.R.T. Exit Lang Auto / Man Remove
HOT surfaces can cause severe burns
CAUTION
➌
Esc
7 8 9
4 5 6
1 2 3
. 0 +/-
Sel
Jog
Alt
POWER
STS
PORT
MOD
NET A
NET B
Exp Param #
S.M.A.R.T. Exit Lang Auto / Man Remove
HOT surfaces can cause severe burns
CAUTION
Gabinetes 0 e 1
Gabinetes 2 e 3
# Nome Cor Estado Descrição
➊ PWR (Tensão)
Verde Estável Acende quando alimenta o inversor.
➋ STS (Status)
Verde Piscando O inversor está pronto, mas não está operando e não há nenhuma falha presente.
Estável O inversor está operando, não há presença de falhas.Amarelo
Consulte a página 4-10
Piscando,inversor parado
Existe uma condição de inibição de partida, o inversor não pode ser inicializado. Verifique o parâmetro 214 [Inib Partida].
Piscando,inversor em funcionamento
Está ocorrendo uma condição de alarme intermitente tipo 1.Verifique o parâmetro 211 [Alarme 1 Inver.].
Estável,inversor em funcionamento
Existe uma condição de alarme contínuo tipo 1.Verifique o parâmetro 211 [Alarme 1 Inver.].
Vermelho
Consulte a página 4-4
Piscando Ocorreu uma falha. Verifique [Código falha x] ou Fila de Falhas.Estável Ocorreu uma falha não reconfigurável.
➌ PORTA Verde – Status das comunicações internas da porta DPI (se houver).MÓD Amarelo – Status do módulo de comunicações (quando instalado).REDE A Vermelho – Status da rede (se conectada).REDE B Vermelho – Status da rede secundária (se conectada).

Identificação e Solução de Problemas 4-3
Indicações de LED da placa de pré-cargaOs indicadores de LED da placa de pré-carga se encontram nos inversores com gabinetes 5 e 6. Eles ficam localizados acima no jumper “tipo linha” ilustrado na Figura 1.2.
Indicações da HIM (Interface de Operação e Programação)A HIM de LCD oferece também uma notificação visual da condição de alarme ou falha.
Nome Cor Estado Descrição
ligar novamente
Verde Estável Indica quando a fonte de alimentação da placa de pré-carga está funcionando.
Alarme Amarelo Piscando
[1][2][3][4][5][6][7]
O número em “[ ]” indica a condição piscante e o alarme associado(1):
Tensão de linha está baixa (<90%).Tensão de linha está muito baixa (<50%).Fase baixa (uma faixa <80% da tensão de linha).Freqüência fora do limite ou assimetria (sincronização da linha falhou).Baixa tensão no barramento CC (dispara a operação de percurso – ride-through).Freqüência de entrada momentaneamente fora do limite (40-65 Hz).Detecção de curto-circuito do barramento CC ativa.
Falha Vermelho Piscando
[2][4]
O número em “[ ]” indica a condição piscante e a falha associada(2):
Curto no barramento CC (Udc <2% após 20 ms).A sincronização da linha falhou ou a linha está baixa (Uac <50% Unom).
(1) A condição de alarme é restabelecida automaticamente quando a condição deixar de existir.(2) A falha indica um funcionamento indevido que deve ser corrigido e que pode ser restaurado somente após desligar e
tensão desligada.
Condição DisplayO inversor está indicando uma falha.
A HIM de LCD registra a condição de falha imediatamente exibindo o seguinte:• “Faulted” (Falha) aparece na linha de status• Número da falha• Nome da falha• Tempo decorrido desde que a falha ocorreu
Pressione a tecla Esc para readquirir o controle da HIM.
O inversor está indicando um alarme.
A HIM de LCD registra a condição de alarme imediatamente exibindo o seguinte:• Nome do alarme (somente alarmes Tipo 2)• Gráfico de sino do alarme
F-> Falha Auto
0,0 HzMenu Principal:
DiagnósticosParâmetro
– Falha – F 5SobretensãoTempo desde a falha
0000:23:52
F->Perda de potência
Auto
0,0 Hz
Menu Principal:
Diagnósticos
Parâmetro
Seleção de Dispositivo

4-4 Identificação e Solução de Problemas
Tabela 4.A Tipos de Falhas, Descrições e Ações
Remoção Manual das Falhas
Etapa Tecla(s)1. Pressionar Esc para admitir a falha. A informação da falha será removida
para que você possa usar a HIM.
2. Cuide da condição que causou a falha. A causa da falha deve ser corrigida antes que ela possa ser removida.
3. Depois de tomar a ação corretiva, remova a falha usando um dos seguintes métodos:• Pressione a tecla Stop (Parar)• Desligue e ligue novamente o inversor• Configure o parâmetro 240 [Remocao Falha] em “1”• “Remova as falhas” no menu de diagnósticos da HIM.
Esc
Descrições das Falhas
Falha No.
Tipo
(1)
Descrição AçãoPerda Ent Anlg 29 ➀
➂Uma entrada analógica é configurada para acusar a perda de sinal. Ocorreu uma perda de sinal.
Configure com [Perda Ent Anlg 1, 2] na página 3-54.
1. Verifique os parâmetros.2. Verifique se há conexões soltas/
rompidas nas entradas.
Chksum Cal Anlg 108 A leitura de checksum dos dados de calibragem analógica não corresponde ao checksum calculado.
Substitua o inversor.
Tent ReinAut 33 ➂ O inversor tentou, sem sucesso, fazer o reset de uma falha e recomeçar operação para o número programado de [Tentat. Rst Falha].
Ative/Desative com [Config Falha 1] na página 3-46.
Corrija a causa da falha e remova manualmente.
Auto-ajuste Abortado 80 A função de auto-ajuste foi cancelada pelo usuário ou ocorreu uma falha.
Reinicie o procedimento.
Entrada auxiliar 2 ➀ Interbloqueio da entrada auxiliar está aberto.
Verifique a fiação remota.
Sobretemp Pl Cont 55 O sensor de temperatura na Placa do Controle Principal detectou calor excessivo.
1. Verifique o ventilador da Placa do Controle Principal.
2. Verifique a temperatura do ar circundante.
3. Verifique quanto à montagem/resfriamento correto.
Resistência FD 69 A resistência do resistor interno de frenagem dinâmica está fora do limite.
Substitua o resistor.
Vector

Identificação e Solução de Problemas 4-5
Inibição de Desacel 24 ➂ O inversor não está seguindo a desaceleração comandada porque está tentando limitar a tensão no barramento.
1. Verifique se a tensão de entrada está dentro dos limites especificados para o inversor.
2. Verifique se a impedância de aterramento do sistema obedece a técnicas adequadas de aterramento.
3. Desative a regulação de barramento e/ou adicione um resistor de frenagem dinâmica e/ou aumente o tempo de desaceleração. Consulte a declaração de Atenção na página P-4.
Sobrecarga do Inversor
64 A classificação do inversor de 110% por 1 minuto ou de 150% por 3 segundos foi ultrapassada.
Reduza a carga ou prolongue o Tempo de Aceleração.
Energização do Inversor
49 Nenhum falha é exibida. Usada como marcador de energização na fila de falhas indicando que a alimentação do inversor foi desligada e ligada.
Carga Excessiva 79 O motor não alcançou a velocidade no tempo designado durante o auto-ajuste.
1. Retire a carga do motor.2. Repita o auto-ajuste.
Perda do Encoder 91 Requer um encoder diferencial. Está faltando um dos 2 sinais de canal do encoder.
1. Verifique a fiação.2. Substitua o encoder.
Erro Quad Encoder 90 Ambos os canais do encoder mudaram o estado dentro de um ciclo de relógio.
1. Verifique se há ruído externo induzido.2. Substitua o encoder.
Falhas Removidas 52 Nenhum falha é exibida. Usada como um marcador na Fila de Falhas indicando que a função de remoção de falhas foi realizada.
Fila FalhaRemov 51 Nenhum falha é exibida. Usada como um marcador na Fila de Falhas indicando que a função de remoção de fila foi realizada.
ReCorFlxFoLim 78 O valor para a corrente de fluxo determinada pelo procedimento de Auto-ajuste ultrapassa a [Corrente Nominal Plena do motor] programada.
1. Programe novamente a [Corrente Nominal Plena do Motor] com o valor correto.
2. Repita o auto-ajuste.Falha de aterramento 13 ➀ Uma trajetória de corrente para a
tomada de terra superior a 25% da classificação do inversor.
Verifique a fiação externa e do motor aos terminais de saída do inversor quanto à condição de aterramento.
Falha Hardware 93 A ativação do hardware está desativada (com ligação em ponte elevada) mas o pino de lógica continua baixo.
1. Verifique o jumper.2. Substitua a Placa de Controle
Principal.
Falha Hardware 130 Erro de carga da disposição das portas.
1. Desligue e ligue novamente. 2. Substitua a Placa de Controle
Principal.Falha Hardware 131 Falha da porta dupla. 1. Desligue e ligue novamente.
2. Substitua a Placa de Controle Principal.
Sobretemp Dissip 8 ➀ A temperatura do dissipador ultrapassa 100% da [Temp Inv].
1. Verifique se não foi ultrapassada a temperatura ambiente máxima.
2. Verifique o ventilador.3. Verifique quanto à carga excessiva.
Falha No.
Tipo
(1)
Descrição Ação

4-6 Identificação e Solução de Problemas
Sobrcorr HW 12 ➀ A corrente de saída do inversor excedeu o limite de corrente do hardware.
Verifique a programação. Verifique quanto à carga excessiva, configuração indevida do reforço CC, configuração da tensão de frenagem CC muito elevada ou outras causas de corrente excessiva.
PCP-PlPt Inc 106 ➁ A informação de classificação do inversor armazenada no quadro de força não é compatível com a placa de controle principal.
Carregue arquivos de versão compatível no inversor.
Perda Comun. E/S 121 Placa de E/S perdeu a comunicação com a Placa de Controle Principal.
Verifique o conector. Verifique se há ruído induzido. Substitua a placa de E/S ou Placa de Controle Principal.
Falha E/S 122 E/S foi detectada, mas a seqüência de energização falhou.
A placa de E/S fica separada no controle padrão e é integrada no controle vetorial.
Substitua a placa de E/S (controle padrão) ou a Placa de Controle Principal (controle vetorial).
Agrup. Err. E/S 120 A configuração da placa de E/S mudou desde a última energização do inversor.
Verifique a configuração.
Perda da fase de entrada
17 O ripple do barramento CC ultrapassou o nível pré-configurado.
Verifique e energia de entrada quanto à falta de fase/fusível queimado.
Faixa Tensão RI 77 “Calcular” é o default de ajuste automático e o valor estabelecido pelo seu procedimento para Tensão Queda RI não está na faixa de valores aceitáveis.
Introduza os dados de identificação do motor novamente.
FaixaTensão Indut 87 A tensão calculada para a impedância indutiva do motor ultrapassa 25% da [Tensão Nominal do Motor].
1. Verifique se o tamanho do motor é adequado.
2. Verifique se a programação da [Tensão Nominal do Motor], parâmetro 41, está correta.
3. Talvez seja necessária uma impedância de saída adicional.
Perda de carga 15 A corrente do torque de saída do inversor se encontra abaixo do [Nível de Perda de Carga] por um período superior ao [TempoPerdaCarga].
1. Verifique as conexões entre o motor e a carga.
2. Verifique os requisitos de nível e tempo.
Sobrecarga do motor 7 ➀ ➂
Disparo de sobrecarga eletrônica interna.
Ative/Desative com [Config Falha 1] na página 3-46.
Há uma carga excessiva no motor. Reduzir a carga para que a corrente de saída do inversor não exceda a corrente estabelecida pela [Corrente Nominal Plena do Motor].
Termistor do motor 16 A saída do termistor está fora dos limites.
1. Verifique se o termistor está conectado.
2. O motor está superaquecido. Reduzir a carga.
Checksum E/S ANV 109 Erro de checksum da EEprom. 1. Desligue, religue e repita a função. 2. Substitua a Placa de Controle
Principal.Falha E/S ANV 110 Erro de E/S da EEprom. 1. Desligue, religue e repita a função.
2. Substitua a Placa de Controle Principal.
Falha No.
Tipo
(1)
Descrição Ação
Standard

Identificação e Solução de Problemas 4-7
Perda de Fase de Saída
21 A corrente em uma ou mais fase foi perdida ou se mantém abaixo do nível pré-configurado.
Verifique a fiação do motor e inversor. Verifique a continuidade fase-fase nos terminais do motor. Verifique se há fios desconectados no motor.
Limite de Sobrevelocidade
25 ➀ As funções como a Compensação de Escorregamento ou Regulação de Barramento tentaram adicionar um ajuste de freqüência de saída superior ao programado em [Limit Sobrev].
Remova a carga excessiva ou condições de recondicionamento ou aumente o [Limite Sobrev].
Sobretensão 5 ➀ Tensão no barramento CC ultrapassou o valor máximo.
Monitore a linha CA quanto a condições transientes ou tensão elevada da linha. A sobretensão do barramento também pode ser causada pela regeneração do motor. Aumente o tempo de desaceleração ou instale a opção de frenagem dinâmica.
Chcksum Parâmetro 100 ➁ A leitura de checksum da placa não corresponde ao checksum calculado.
1. Restaure os defaults.2. Recarregue o Conjunto do Usuário, se
usado.Parâm valor default 48 O inversor recebeu um comando para
gravar os valores de default para a EEPROM.
1. Remova a falha ou desligue e ligue novamente o inversor.
2. Programe os parâmetros do inversor conforme necessário.
Fase U p/Ter 38 Uma falha fase-terra foi detectada entre o inversor e motor nesta fase.
1. Verifique a fiação entre o inversor e o motor.
2. Verifique o motor quanto à fase ligada à terra.
3. Substitua o inversor.
Fase V p/Ter 39Fase W p/Ter 40
Curto Fase UV 41 Foi detectada uma corrente excessiva entre esses dois terminais de saída.
1. Verifique a fiação dos terminais de saída do inversor e motor quanto à condição de curto.
2. Substitua o inversor.
Curto Fase VW 42Curto Fase UW 43
Perda Porta DPI 1-5 81- 85
➁ A porta DPI deixou de se comunicar.
Um dispositivo SCANport foi conectado a um inversor que está operando dispositivos DPI a uma taxa de velocidade de transmissão de 500k.
1. Se o adaptador não tiver sido desconectado intencionalmente, verifique a fiação à porta. Substitua a fiação, expansor da porta, adaptadores, Placa de Controle Principal ou o todo inversor, conforme necessário.
2. Verifique a conexão da HIM.3. Se um adaptador foi desconectado
intencionalmente e o bit da [Mascara Logica] para aquele adaptador estiver configurado em “1” ocorrerá essa falha. Para desativar a falha, configure o bit da [Mascara Logica] para o adaptador em “0”.
Adaptador da Porta 1-5
71- 75
A placa de comunicações está com uma falha.
1. Verifique a fila de eventos e as infor- mações de falhas correspondentes para o dispositivo DPI.
Falha No.
Tipo
(1)
Descrição Ação

4-8 Identificação e Solução de Problemas
Perda de potência 3 ➀ ➂
A tensão de barramento CC permaneceu abaixo de 85% da tensão nominal por um período superior ao [Tempo Perda Pot]. Ative/Desative com [Config Falha 1] na página 3-46.
Monitore a linha de entrada CA quanto à baixa tensão ou interrupção de tensão na linha.
Unidade de potência 70 Um ou mais dos transistores de saída estavam operando na região ativa em vez da dessaturação. Isso pode ser causado por corrente excessiva do transistor ou insuficiente tensão de base do inversor.
1. Verifique quanto a transistores de saída danificados.
2. Substitua o inversor.
Perda Ent Pulso 92 O canal Z é selecionado como uma entrada de pulso e não há presença de sinais.
1. Verifique a fiação.2. Substitua o gerador de pulsos.
Chksum Plac Pot1 104 A leitura de checksum da EEPROM não corresponde ao checksum calculado pelos dados da EEPROM.
Remova a falha ou desligue e ligue novamente o inversor.
Chksum Plac Pot2 105 ➁ A leitura de checksum da placa não corresponde ao checksum calculado.
1. Desligue e ligue novamente o inversor.2. Se o problema persistir, substitua o
inversor.PCP-PlPt Substituída 107 ➁ A Placa de Controle Principal foi
substituída e os parâmetros não foram programados.
1. Restaure os defaults.2. Reprograme os parâmetros.
Pino de Proteção 63 ➂ O [Val Limite Corr] foi ultrapassado. Ative/Desative com [Config Falha 1] na página 3-46.
Verifique os requisitos de carga e configuração do [Val Limite Corr].
Falha software 88 Erro de handshake do microprocessador.
Substitua a Placa de Controle Principal.
Falha software 89 Erro de handshake do microprocessador.
Substitua a Placa de Controle Principal.
Sobrcorr SW 36 ➀ A corrente de saída do inversor excedeu a classificação de corrente de 1 ms. Esta classificação é maior do que a classificação de corrente de 3 segundos e menor do que o nível de falha de sobrecorrente do hardware. É tipicamente 200-250% do regime contínuo do inversor.
Verifique quanto à carga excessiva, configuração indevida de reforço CC. Tensões de frenagem CC com configuração muito elevada.
Band Vel ProvaTorq 20 A diferença entre a [Freq Comandada] e [Velocidade do Encoder] ultrapassou o nível configurado na [Banda Desvio Vel] por um período superior a [IntegBandaVel].
1. Verifique a fiação entre motor e o inversor.
2. Verifique se o freio mecânico está solto.
Sobretemp Trans 9 ➀ Os transistores de saída ultrapassaram sua temperatura máxima de operação.
1. Verifique se não foi ultrapassada a temperatura ambiente máxima.
2. Verifique o ventilador.3. Verifique quanto à carga excessiva.
Falha No.
Tipo
(1)
Descrição Ação

Identificação e Solução de Problemas 4-9
Tabela 4.B Referência Cruzada de Falhas
Os alarmes são removidos automaticamente quando a condição que causou o alarme não estiver mais presente.
Subtensão 4 ➀ ➂
A tensão do barramento CC caiu abaixo do valor mínimo de 407 VCC a uma entrada 400/480V ou de 204 VCC a uma entrada de 200/240V. Ative/Desative com [Config Falha 1] (página 3-46).
Monitore a linha de entrada CA quanto à baixa tensão ou interrupção de tensão.
Chksum Conj. Us1 101 ➁ A leitura de checksum do conjunto do usuário não corresponde ao checksum calculado.
Regrave o conjunto do usuário.Chksum Conj. Us2 102 ➁
Chksum Conj. Us3 103 ➁
(1) Consulte a página 4-1 quanto à descrição dos tipos de falhas.
Falha No.
Tipo
(1)
Descrição Ação
No.(1) Falha No. (1) Falha No. (1) Falha
2 Entrada auxiliar 39 Fase V p/Ter 87 FaixaTensão Indut3 Perda de potência 40 Fase W p/Ter 88 Falha software4 Subtensão 41 Curto Fase UV 89 Falha software5 Sobretensão 42 Curto Fase VW 90 Erro Quad Encoder7 Sobrecarga do motor 43 Curto Fase UW 91 Perda do Encoder8 Sobretemp Dissip 48 Parâm valor default 92 Perda Ent Pulso9 Sobretemp Trans 49 Energização do Inversor 93 Falha Hardware12 Sobrcorr HW 51 Fila FalhaRemov 100 Chcksum Parâmetro13 Falha de aterramento 52 Falhas Removidas 101-103 Chcksum Conj. Usuário15 Perda de carga 55 Sobretemp Pl Cont 104 Chksum Plac Pot116 Termistor do motor 63 Pino de Proteção 105 Chksum Plac Pot217 Perda da fase de entrada 64 Sobrecarga do Inversor 106 PCP-PlPt Inc20 Band Vel ProvaTorq 69 Resistência FD 107 PCP-PlPt Substituída21 Perda de Fase de Saída 70 Unidade de potência 108 Chksum Cal Anlg24 Inibição de Desacel 71-75 Adaptador da Porta 1-5 120 Agrup. Err. E/S25 Limite de Sobrevelocidade 77 Faixa Tensão RI 121 Perda Comun. E/S29 Perda Ent Anlg 78 ReCorFlxFoLim 122 Falha E/S33 Tent ReinAut 79 Carga Excessiva 130 Falha Hardware36 Sobrcorr SW 80 Auto-ajuste Abortado 131 Falha Hardware38 Fase U p/Ter 81-85 Perda Porta DPI 1-5
(1) Os números de falhas não relacionados estão reservados para uso futuro.
Remoção de Alarmes

4-10 Identificação e Solução de Problemas
Tabela 4.C Descrições e Ações de Alarmes
Descrições dos Alarmes
Alarme No.
Tipo
(1)
Descrição
Perda Ent Anlg 5 ➀ Uma entrada analógica está configurada para soar um “Alarme” na ocasião da perda de sinal, e ocorreu a perda de sinal.
Conflito Bipolar 20 ➁ O parâmetro 190 [Modo Direcao] está ajustado em “Bipolar” ou “Desativar Reverso”, e uma ou mais das seguintes funções de entrada digital são configuradas: “Frente/Reverso”, “Operação para Frente”, “Operação Reversa”, “Jog para Frente” ou “Jog Reverso”.
Freio escorregou (patinou)
32 ➁ O movimento do encoder ultrapassou o nível em [ContEscFre] após o ajuste do freio.
Inibição de Desacel
10 ➀ A desaceleração do inversor está sendo inibida.
Conf Ent Dig A 17 ➁ As funções de entrada digital estão em conflito. As combinações marcadas com “ ” causarão um alarme.
Conf Ent Dig B 18 ➁ Uma entrada de Partida digital foi configurada sem uma entrada de Parada ou há outras funções em conflito. As combinações em conflito estão marcadas com um “ ” e causarão um alarme.
Conf Ent Dig C 19 ➁ Mais de uma entrada física foi configurada para a mesma função de entrada. Configurações múltiplas não são permitidas para as funções de entrada a seguir:Para frente/Reverso Operação Reversa Modo Regulação de Barramento BSeleção de Velocidade 1 Jog para Frente Acel2 / Desacel2Seleção de Velocidade 2 Jog Reverso Acel 2Seleção de Velocidade 3 Operação Desacel 2Operação para Frente Modo Parada B
Nív Sobrec Inv 1
8 ➀ A temperatura IGBT calculada requer uma redução na freqüência PWM. Se o [Modo Sobrecar Inv] estiver desativado e a carga não for reduzida, eventualmente ocorrerá uma falha de sobrecarga.
* Jog 1 e Jog 2 com a opção com controle vetorialAcel2 /
Desacel2 Aceleraç 2 Desacel 2 Jog*Jog para
frenteJog
reverso Frente/Rev
Acel2 / Desacel2
Aceleraç 2
Desacel 2
Jog*
Jog para frente
Jog reverso
Frente/Rev
* Jog 1 e Jog 2 com a opção com controle vetorial
PartidaParada-
CF OperarOperação para frente
Operação reversa Jog*
Jog para frente
Jog reverso
Frente/Rev
Partida
Parada-CF
Operar
Operação para frente
Operação reversa
Jog*
Jog para frente
Jog reverso
Frente/Rev

Identificação e Solução de Problemas 4-11
Nív Sobrec Inv 2
9 ➀ A temperatura IGBT calculada requer uma redução no Limite de Corrente. Se o [Modo Sobrecar Inv] estiver desativado e a carga não for reduzida, eventualmente ocorrerá uma falha de sobrecarga.
ReCorFlxFoLim 26 ➁ O valor da corrente de fluxo calculado ou medido não está dentro da faixa antecipada. Verifique os dados do motor e execute novamente os testes do motor.
Adv Terra 15 ➀ A corrente de terra ultrapassou o nível configurado em [Nível Adv Terra].Perda Fase Ent 13 ➀ O ripple do barramento CC ultrapassou o nível no [Nível Perda de Fase]. Sobreaq Res FD Int
6 ➀ O inversor desativou temporariamente o regulador FD porque a temperatura do resistor ultrapassou um valor predeterminado.
Faixa Tensão RI 25 ➁ O default de ajuste automático do inversor é “Calcular” e o valor calculado para Tensão Queda RI não está na faixa de valores aceitáveis. Esse alarme deverá ser removido quando todos os dados de identificação do motor forem introduzidos corretamente.
Faixa Tens Ixo 28 ➁ A indutância de dispersão do motor está fora da faixa.Perda de carga 14 A corrente do torque de saída se encontra abaixo do [Nível de Perda de Carga] por um
período superior ao [TempoPerdaCarga].Conf Freq Máx 23 ➁ A soma de [Velocidade Max.] e [Limit Sobrev] ultrapassa a [Freq. Máxima]. Aumente o
valor da [Freq. Máxima] ou diminua a [Velocidade Max.] e/ou [Limit Sobrev] para que a soma seja inferior ou igual à [Freq. Máxima].
Termistor do motor
12 O valor nos terminais do termistor foi ultrapassado.
Conf Tipo Motor 21 ➁ O [Tipo do Motor] foi configurado em “Relut Sincr” ou “PM Sincr” e ocorre uma ou mais das seguintes condições:• [Modo Desemp. Trq] = “Vetor sensorless”, “Economizar VS” ou “V/Hz Vent./Bomba”• [Tempo Fluxo] é superior a 0,0 segundo• [Modo Velocidade] está configurado em “Comp. de Escorregamento”• [Auto-ajuste] = “Ajuste Estático” ou “Ajuste de Rotação”
Conflito Hz Plac 22 ➁ O modo do ventilador/bomba é selecionado no [Modo Perf Torq] e a razão da [Freq Nominal] para [Freq Máxima] é superior a 26.
Perda de potência
3 ➀ O inversor percebeu uma perda de alimentação.
Pré-carga Ativa 1 ➀ O inversor se encontra no estado inicial de pré-carga do barramento CC.Conflito PTC 31 ➁ PTC está ativado para a Ent. Analóg. 1, que está configurada como uma fonte de
corrente de 0-20 mA na [Config Entr Anlg].Config Inativo 29 ➁ Erro de configuração de Inativo/Ativo. Com [Modo ativ-inativ] = “Direto” as causas
prováveis incluem: o inversor está parado e o [Nív. ativ-inativ]< [Nivelinativo]. “Parada=CF”, “Operação”, “Operação para Frente” ou a “Operação Reversa” não está configurada na [Sel Entr Digit x].
Conf Ref Veloc 27 ➁ A [Sel Ref Veloc x] ou [Sel Refer de PI] está configurada em “Reservado”.Partida na Energização
4 ➀ [Partida Energiz] está ativada. O inversor poderá iniciar a qualquer momento dentro de 10 segundos de sua energização.
Alarme No.
Tipo
(1)
Descrição

4-12 Identificação e Solução de Problemas
Tabela 4.D Referência Cruzada de Alarmes
Conf Ref Man BT
30 ➁ Ocorre quando:• O (default) “Auto/Manual” estiver selecionado para o parâmetro 363, [Sel Entr Digit
3],
e • o parâmetro 96, [Sel Ref Man BT], tiver sido reprogramado.
Nenhum outra entrada analógica selecionada pode ser programada.
Exemplo: Se a [Sel Ref Man BT] estiver reprogramada em “Ent. Analóg. 2”, todos os defaults de fábrica para o valor de “Ent. Analóg. 2” devem ser reprogramados (tais como os parâmetros 90, 117, 128 e 179). Consulte também os Exemplos de Auto/Manual na página 1-23.
Para corrigir:• Verifique/reprograme os parâmetros que fazem referência a uma entrada analógica
ou• Reprograme a [Ent Digital 3] para outra função ou em “Não usado”.
Confl ProvaTorq 49 ➁ Quando a [ConfigProvaTrq] estiver ativada, os parâmetros [Modo Desemp. Trq], [Sel Feedback] e [Tipo Fdbk Motor] devem estar devidamente configurados (consulte a página C-4).
Subtensão 2 ➀ A tensão de barramento caiu abaixo de um valor predeterminado.VHz Neg Slope 24 ➁ [Modo Desemp. Trq] = “V/Hz personalizado” e a inclinação V/Hz é negativa.Ativação 11 ➀ O temporizador de Ativar está contando para um valor que irá inicializar o inversor.
(1) Consulte a página 4-1 quanto à descrição dos tipos de alarmes.
Alarme No.
Tipo
(1)
Descrição
Vector
No. (1) Alarme No. (1) Alarme No. (1) Alarme
1 Pré-carga Ativa 13 Perda Fase Ent 25 Faixa Tensão RI2 Subtensão 14 Perda de carga 26 ReCorFlxFoLim3 Perda de potência 15 Adv Terra 27 Conf Ref Veloc4 Partida na Energização 17 Conf Ent Dig A 28 Faixa Tens Ixo5 Perda EntAnl 18 Conf Ent Dig B 29 Config Inativo6 Sobreaq Res FD Int 19 Conf Ent Dig C 30 Conf Ref Man BT8 Nív Sobrec Inv 1 20 Conflito Bipolar 31 Conflito PTC9 Nív Sobrec Inv 2 21 Conf Tipo Motor 32 Freio escorregou (patinou)10 Inibição de Desacel 22 Conflito Hz Plac 49 Confl Prova Torq11 Ativação 23 Conf Freq Máx12 Termistor do motor 24 VHz Neg Slope
(1) Os números de alarmes não relacionados estão reservados para uso futuro.

Identificação e Solução de Problemas 4-13
O inversor não inicia a partir das entradas de Partida ou Operação conectadas ao bloco de terminais.
O inversor não inicializa a partir da HIM.
O inversor não reage a mudanças no comando de velocidade.
Sintomas Comuns e Ações Corretivas
Causa(s) Indicação Ação corretiva
Inversor com falha Luz de status vermelha piscando
Remover falha.• Pressione a tecla Stop (Parar)• Desligar e ligar novamente • Configurar [Remocao Falha] em 1
(Veja a página 3-46) • “Remover as falhas” no menu de
diagnósticos da HIM. Fiação de entrada incorreta. Consulte as páginas 1-20 e 1-21 para exemplos de fiação.• O controle de 2 fios exige a entrada de
Operação, Operação para Frente, Operação Reversa ou Jog.
• O controle de 3 fios exige as entradas de Partida e Parada.
• É necessário um jumper do terminal 25 ao 26.
Nenhuma Faça as instalações de entradas corretamente e/ou instalar jumper.
Programação de entrada digital incorreta.• Duas seleções mutualmente exclusivas foram
feitas (por exemplo, Jog e Jog para Frente).• A programação de 2 e 3 fios pode ser
conflitante.• Funções exclusivas (por exemplo, controle de
direção) podem ter entradas múltiplas configuradas.
• A parada é um default de fábrica e não está conectada.
Nenhuma Programe [Sel Entr Digit x] para entradas corretas. (Veja a página 3-57)
A programação de Partida ou Operação pode estar faltando.
Luz de status amarela piscando e a indicação “Conf EntDigB” na HIM de LCD.
[Status Inversor2] indica alarme(s) tipo 2.
Programe [Sel Entr Digit x] para solucionar os conflitos. (Veja a página 3-57)
Remova seleções múltiplas da mesma função.
Instalar botão de parada para aplicar um sinal no terminal de parada.
Causa(s) Indicação Ação corretiva
O inversor está programado para o controle de 2 fios. O botão de Partida da HIM está desativado para o controle de 2 fios.
Nenhuma Se o controle de 2 fios for exigido, nenhuma ação é necessária.
Se o controle de 3 fios é necessário, programe [Sel Entr Digit x] para entradas corretas. (Veja a página 3-57)
Causa(s) Indicação Ação corretiva
Nenhum valor está vindo da fonte do comando.
A linha de Status da HIM de LCD indica “Na Velocidade” e a saída é 0 Hz.
1. Se a fonte for uma entrada analógica, verifique a fiação e use um medidor para verificar a presença de sinal.
2. Verifique [Freq Comandada] quanto à fonte correta. (Veja a página 3-12)

4-14 Identificação e Solução de Problemas
O motor e/ou inversor não acelera para a velocidade comandada.
A operação do motor é instável.
O sentido de rotação do inversor não inverte.
Foi programada uma fonte de referência incorreta.
Nenhuma 3. Verifique a [Fonte Ref Veloc] quanto à fonte de referência de velocidade. (Veja a página 3-42)
4. Reprograme a [Sel Ref Veloc A] para a fonte correta. (Veja a página 3-24)
A fonte de Referência Incorreta está sendo selecionada através de dispositivo remoto ou entradas digitais.
Nenhuma 5. Verifique [Status Inversor1], página 3-41, bits 12 e 13, quanto a seleções de fontes inesperadas.
6. Verifique o [Status Ent Dig], página 3-43, para ver se as entradas estão selecionando uma fonte alternativa.
7. Reprograme as entradas digitais para corrigir a opção “Sel Velocidade x” (Veja a página 3-57)
Causa(s) Indicação Ação corretiva
Causa(s) Indicação Ação corretiva
O tempo de aceleração é excessivo. Nenhuma Reprogramar o [Tempo Aceleraç x]. (Veja a página 3-31)
Carga excessiva ou tempos de aceleração curtos forçam o inversor ao limite de corrente, reduzindo ou parando a aceleração.
Nenhuma Verifique o [Status Inversor2], bit 10, para ver se o inversor se encontra no Limite de Corrente. (Veja a página 3-41)
Remova o excesso de carga ou reprograme o [Tempo Aceleraç x].(Veja a página 3-31)
Valor ou fonte de comando da velocidade não é conforme esperado.
Nenhuma Verifique quanto ao Comando de Velocidade adequado usando as Etapas 1 a 7 acima.
A programação está impedindo que a saída do inversor ultrapasse os valores de limitação.
Nenhuma Verifique a [Velocidade Max.](Veja a página 3-22) e [Freq Máxima] (Veja a página 3-16) para certificar-se de que a velocidade não esteja limitada pela programação.
Causa(s) Indicação Ação corretiva
Os dados do motor foram introduzidos incorretamente ou não foi realizado o Auto-ajuste.
Nenhuma 1. Introduza os dados de identificação do motor corretamente.
2. Realize o procedimento de Auto-ajuste “Estático” ou de “Rotação”. (No. Parâm. 061, página 3-17)
Causa(s) Indicação Ação corretiva
A entrada digital não está selecionada para o controle de reversão.
Nenhuma Verifique [Sel Entr Digit x], página 3-57. Selecione a entrada correta e programe para o modo de reversão.
A entrada digital está instalada incorretamente.
Nenhuma Verifique a fiação de entrada. (Veja a página 1-15)
O parâmetro do modo de direção está programado incorretamente.
Nenhuma Reprograme o [Modo Direcao], página 3-38 para um controle “Bipolar” analógico ou “Unipolar” digital.
A fiação do motor está faseada indevidamente para o reverso.
Nenhuma Troque dois fios do motor.
A entrada do comando de velocidade analógica bipolar está instalada incorretamente ou o sinal está ausente.
Nenhuma 1. Use um medidor para verificar a presença da tensão de entrada analógica.
2. Verifique a fiação. (Veja a página 1-15)
A tensão positiva controla a direção para frente. A tensão negativa comanda a direção reversa.

Identificação e Solução de Problemas 4-15
Parar o inversor resulta em uma falha de Inibição de Desacel.
Causa(s) Indicação Ação corretiva
O recurso de regulação de barramento está ativado e está detendo a desaceleração devido a uma tensão de barramento excessiva. A tensão de barramento excessiva é normalmente causada pela energia regenerada excessiva ou tensões de entrada de linha CA instáveis.
O temporizador interno deteve a operação do inversor.
Tela de falha de Inibição de Desacel.
A Linha de Status do LCD indica “Falha”.
1. Consulte a declaração de Atenção na página P-4.2. Reprograme os parâmetros 161/162 para eliminar
toda seleção de “Ajustar Freq”.3. Desativar a regulação de barramento (parâmetros
161 e 162) e adicionar um freio dinâmico.4. Corrija a instabilidade da linha de entrada CA ou
adicione um transformador de isolamento.5. Faça o reset do inversor.

4-16 Identificação e Solução de Problemas
Selecione o ponto de teste com [Sel Ponto Testex], parâmetros 234/236. Os valores podem ser visualizados com [DadoPonto Testex], parâmetros 235/237.
Funções e Códigos de Pontos de Teste
No.(1)
(1) Introduzir na [Sel Ponto Testex].
Descrição UnidadesValoresMínimo Máximo Default
01 Status Erro de PI 1 0 255 002 Temp dissipador 0,1 grau C –100,0 100,0 003 Limite Corr. Ativa 1 0 32767 004 Freq PMW Ativa 1 Hz 2 10 405 MegaWatt-Hora de vida útil (2)
(2) Use a equação abaixo para calcular a quantidade de megawatt-horas totais de vida útil.
0,0001 MWh 0 214748,3647 006 Tempo vida útil de
funcionamento0,0001 Hrs 0 214748,3647 0
07 Tempo vida útil energiz 0,0001 Hrs 0 214748,3647 008 Ciclos vida útil energia 1 0 4294967295 009 Fração MW-HR de vida útil (2) 1 0 4294967295 010 Unidade Fração MW-HR(2) 1 0 4294967295 011 Tempo vida útil da PCP 0,0001 Hrs 0 214748,3647 012 Ent. Analóg. Bruta 1 1 0 013 Ent. Analóg. Bruta 2 1 0 016 Cont Mens Rec SC 1 0 65535 017 Cont Mens Trans SC 1 0 65535 018 Cont Timeout SC 1 0 255 019 Má Cont Mens SC 1 0 255 022 Cont Mens Rec CP 1 0 65535 023 Cont Mens Trans CP 1 0 65535 024-29 Cont Timeout CP1-6 1 0 255 030 Cont BusOff CAN 1 0 65535 031 No. de Entradas Analógicas 1 0 x 032 Temperatura bruta 1 0 65535 033 Amp Norm Mtr STM 0,1 Amps 0 65535 034 Freqüência Com-STM 1 0 420 035 Lim Corr Com-STM 0,1 0 036 Espera CC Com-STM 1 0 32767 037 Temp Pl Controle 0,1 0,0 60,0 0,0
Valor de Código 9Valor de Código 10
⎛⎜⎝
⎞⎟⎠
× 0,1 + Valor de Código 5 = Total de Megawatt-horas de vida útil

Apêndice A
Informações suplementares sobre o inversor
Para informações sobre....Consulte a página..
Especificações A-1
Configurações de comunicação A-4
Dispositivos de Saída A-7
Classificações de fusíveis e disjuntores do inversor A-7
Dimensões A-15
Referência cruzada dos gabinetes A-22
Especificações
Categoria EspecificaçãoCertificação de normas
Relacionado na UL508C e CAN/CSA-C2.2 No. 14-M91.
Marcado para todas as diretrizes européias aplicáveis(1)
Diretriz EMC (89/336/EEC)EN 61800-3 Sistemas de inversores elétricos com velocidade ajustável
Diretriz de baixa tensão (73/23/EEC)EN 50178 Equipamento eletrônico para uso em instalações elétricas
Certificado pela AS/NZS, 1997 Grupo 1, Classe A.
O inversor foi projetado também para atender as seguintes especificações:NFPA 70 – Código Elétrico Nacional dos EUANEMA ICS 3.1 – Padrões de segurança para construção e guia para seleção, instalação e
operação de sistemas de inversor de velocidade variável.IEC 146 – Código Elétrico Internacional.
(1) Impulsos de ruído aplicados podem ser contados além do trem de pulsos padrão que causa leituras errôneas de [Freq Pulso] elevadas.
Categoria Especificação
Proteção Inversor 200-208V 240V 380/400V 480V 600V 690V
Disparo de sobretensão de entrada CA: 247VCA 285VCA 475VCA 570VCA 690VCA
Disparo de subtensão de entrada CA: 120VCA 138VCA 233VCA 280VCA 345VCA
Disparo de sobretensão de barramento: 405VCC 405VCC 810VCC 810VCC 1013VCC
Desligamento/falha de subtensão de barramento: 153VCC 153VCC 305VCC 305VCC 381VCC
Tensão de barramento nominal: 281VCC 324VCC 540VCC 648VCC 810VCC
Todos os inversores
Termistor do dissipador: Monitorado pelo disparo de sobretemperatura do microprocessador
Disparo de sobrecorrente do inversorDisparo de sobrecorrente de software:Disparo de sobrecorrente de hardware:
200% da corrente nominal (típico)
220-300% da corrente nominal (depende da classificação do inversor)
Transientes de linha: pico de até 6000 Volts de acordo com o IEEE C62.41-1991
Uc USL®
N223

A-2 Informações suplementares sobre o inversor
Proteção(continuação)
Imunidade a ruídos da lógica de controle: Transientes de arco de chuveiro até o pico de 1500V
Percurso de energia: 15 milissegundos a carga plena
Percurso de controle lógico: Mínimo de 0,5 segundo, típico de 2 segundos
Disparo de falha de aterramento: Fase-terra na saída do inversor
Disparo de curto-circuito: Fase-fase na saída do inversor
Ambiente Altitude: Máx. 1000 m (3300 pés) sem redução
Temperatura máxima do ar circundante sem redução:
IP20, NEMA Tipo 1: 0 a 50 graus C (32 a 122 graus F), típico. Consulte as exceções nas páginas A-8 a A-13.
Temperatura de armazenamento (todas const.): –40 a 70 graus C (–40 a 158 graus F)
Atmosfera: Importante: O inversor não deve ser instalado em uma área onde a atmosfera ambiente contenha gás corrosivo ou volátil, vapores ou poeira. Se o inversor não for instalado imediatamente, ele deve ser armazenado em uma área onde não estará exposto a uma atmosfera corrosiva.
Umidade relativa: 5 a 95% (sem condensação)
Choque: Pico de 15G para uma duração de 11 ms (±1,0 ms)
Vibração: Deslocamento de 0,152 mm (0,006 pol.), pico de 1G
Som:Gabinete
Velocidade do ventilador
Nível de som
Nota: O nível de pressão do som é medido a 2 metros.0 30 CFM (0,85 m3/min) 58 dB
1 30 CFM (0,85 m3/min) 59 dB
2 50 CFM (1,4 m3/min) 57 dB
3 120 CFM (3,4 m3/min)
61 dB
4 190 CFM (5,4 m3/min)
59 dB
5 200 CFM (5,7 m3/min)
71 dB
6 300 CFM (8,5 m3/min)
72 dB
Especificações elétricas
Tolerância de tensão: Consulte a página C-24 quanto à potência plena e faixa operacional.
Tolerância de freqüência: 47-63 Hz.
Fases de entrada: Entrada trifásica fornece classificação plena para todos os inversores. Operação monofásica oferece 50% da corrente nominal.
Fator de deslocamento de força: 0,98 por toda faixa de velocidade.
Eficiência: 97,5% na corrente nominal, tensão de linha nominal.
Classificação máxima de curto-circuito: Corrente assimétrica de 200,000 Amp.
Classificação efetiva do curto-circuito: Determinada pela classificação AIC do fusível/disjuntor instalado.
Controle Método: PWM sinoidal codificado com freqüência portadora programável. As classificações se aplicam a todos os inversores (consulte as Diretrizes de Redução no Manual de Referência do Powerflex). O inversor pode ser fornecido como 6 ou 12 pulsos em um pacote configurado.
Freqüência portadora: 2, 4, 8 e 10 kHz. Classificação do inversor baseada em 4 kHz (consulte as páginas A-8 a A-13 quanto às exceções).
Faixa da tensão de saída: 0 à tensão nominal do motor
Faixa da freqüência de saída: Controle padrão – 0 a 400 Hz; Controle vetorial – 0 a 420 Hz.
Precisão da freqüênciaEntrada digital:Entrada analógica:
Dentro de ±0,01% da freqüência de saída configurada. Dentro de ±0,4% da freqüência de saída máxima.
Categoria Especificação

Informações suplementares sobre o inversor A-3
Controle(continuação)
Controle de freqüência: Regulação de velocidade – c/ compensação de escorregamento (Modo Volts por Hertz)
0,5% da velocidade básica em uma faixa de velocidade de 40:1
faixa operacional de 40:1largura de banda de 10 rad/s
Regulação de velocidade – c/ compensação de escorregamento(Modo Vetor Sensorless)
0,5% da velocidade básica em uma faixa de velocidade de 80:1
faixa operacional de 80:1largura de banda de 20 rad/s
Regulação de velocidade – c/Feedback(Modo Vetor Sensorless)
0,1% da velocidade básica em uma faixa de velocidade de 80:1
faixa operacional de 80:1largura de banda de 20 rad/s
Controle de Velocidade: Regulação de velocidade – s/Feedback(Modo Controle Vetorial)
0,1% da velocidade básica em uma faixa de velocidade de 120:1
faixa operacional de 120:1largura de banda de 50 rad/s
Regulação de velocidade – c/Feedback(Modo Controle Vetorial)
0,001% da velocidade básica em uma faixa de velocidade de 120:1
faixa operacional de 1000:1largura de banda de 250 rad/s
Regulagem de torque: Regulagem de torque – s/Feedbacklargura de banda de 600 rad/s, ±10%
Regulagem de torque – c/Feedbacklargura de banda de 2500 rad/s, ±5%
Controle selecionável do motor: Vetor sensorless com sintonização completa. V/Hz padrão com capacidade total de customização. O PF700 adiciona o controle vetorial.
Modos de parada: Diversos modos de parada programáveis, incluindo: rampa, coast (movimento por inércia), frenagem CC, rampa para manter e curva S.
Aceleração/desaceleração: Dois tempos de aceleração e desaceleração programáveis independentemente. Cada tempo pode ser programado de 0 - 3600 segundos em incrementos de 0,1 segundo.
Sobrecarga intermitente: Capacidade de sobrecarga de 110% por até 1 minutoCapacidade de sobrecarga de 150% por até 3 segundos
Capacidade limite de corrente: Limite de corrente proativa programável de 20 a 160% da corrente de saída nominal. Ganhos proporcional e integral programáveis independentemente.
Proteção eletrônica contra sobrecarga do motor:
Proteção classe 10 com resposta sensível à velocidade. Investigado pela U.L. para cumprir o Artigo 430 do N.E.C, Arquivo E59272, volume 12 da U.L.
Encoder Tipo: Canal duplo, incremental
Alimentação: 12V, 250mA. Entradas mínimas de 12V, 10mA isoladas com transmissor diferencial, máximo de 250 kHz.
Quadratura: 90°, ±27 graus a 25 graus C.
Ciclo de serviço: 50%, +10%
Requisitos: Os encoders devem ser tipo acionador de linha, quadratura (canal duplo) ou pulso (canal simples). saída de 8-15V CC, extremidade simples ou diferencial e capazes de suprir pelo menos 10mA por canal. A freqüência de entrada máxima é 250 kHz. A placa de interface do encoder aceita onda quadrada de 12V CC com uma tensão de estado elevado mínima de 7,0V CC (encoder de 12 volts). A tensão máxima de estado baixo é 0,4V CC.
Categoria Especificação
Standard
Vector
Standard
Vector
Vector
Vector
Vector
Vector
Vector

A-4 Informações suplementares sobre o inversor
Configurações típicas do controlador programávelImportante: Se as transferências de bloco forem programadas para gravar
informações continuamente no inversor, deve-se tomar cuidado para formatar a transferência de bloco corretamente. Se o atributo 10 for selecionado para a transferência de bloco, os valores serão gravados somente na RAM e não serão salvos pelo inversor. Este é o atributo de preferência para transferências contínuas. Se o atributo 9 for selecionado, cada varredura de programa completará uma gravação para a memória não-volátil do inversor (EEprom). Como a EEprom possui um número fixo de gravações permitidas, as transferências de bloco contínuas logo irão danificar a mesma. Não designe o atributo 9 para transferências de bloco contínuas. Consulte o Manual do Usuário do adaptador de comunicações individual para obter maiores detalhes.
Configurações de comunicação

Informações suplementares sobre o inversor A-5
Palavras de comando de lógica/status
Figura A.1 Palavra de comando de lógica
Bits de lógica15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Comando Descrição
x Parada(1) 0 = Não parada1 = Parada
x Partida(1)(2) 0 = Não Partida1 = Partida
x Jog 0 = Não jog1 = Jog
x Remover falhas
0 = Não remover falhas1 = Remover falhas
x x Direção 00 = Sem comando01 = Comando para frente10 = Comando reverso11 = Manter sentido atual
x Controle local 0 = Sem controle local1 = Controle local
x Incremento de MOP
0 = Não incremento1 = Incremento
x x Taxa de aceleração
00 = Sem comando01 = Usar tempo aceleração 110 = Usar tempo aceleração 211 = Usar tempo presente
x x Taxa de desaceleração
00 = Sem comando01 = Usar tempo de desaceleração 110 = Usar tempo de desaceleração 211 = Usar tempo presente
x x x Seleção de referência (3)
000 = Sem comando001 = Ref. 1 (Seleção Ref A)010 = Ref. 2 (Seleção Ref B)011 = Ref. 3 (Pré-configurada 3)100 = Ref. 4 (Pré-configurada 4)101 = Ref. 5 (Pré-configurada 5)110 = Ref. 6 (Pré-configurada 6)111 = Ref. 7 (Pré-configurada 7)
x Decréscimo de MOP
0 = Não decréscimo1 = Decréscimo
(1) A condição (lógica 0) “0 = Não parada” deve estar presente antes que condição “1 = Partida” dê partida no inversor. O comando de Partida atua como um comando de Partida momentâneo. “1” dará partida no inversor, mas retornar ao “0” não irá parar o inversor.
(2) Esta Partida não funcionará se uma entrada digital (parâmetros 361-366) for programada para um controle de 2 fios (opção 7, 8 ou 9).
(3) Esta Seleção de Referência não funcionará se uma entrada digital (parâmetros 361-366) for programada para “Sel Velocidade 1, 2 ou 3” (opção 15, 16 ou 17). Observe que a Seleção de Referência é “Controle Exclusivo”. Veja [Controle Referen] na página 3-52.

A-6 Informações suplementares sobre o inversor
Figura A.2 Palavra de status de lógica
Bits de lógica15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Status Descrição
x Pronto 0 = Não pronto1 = Pronto
x Ativo 0 = Não ativo1 = Ativo
x Direção de comando
0 = Reverso1 = Para frente
x Direção real 0 = Reverso1 = Para frente
x Aceleração 0 = Não acelerando1 = Acelerando
x Desaceleração 0 = Não desacelerando1 = Desacelerando
x Alarme 0 = Sem Alarme 1 = Alarme
x Falha 0 = Sem falha1 = Falha
x Na velocidade 0 = Não está na referência1 = Na referência
x x x Controle local (1)
000 = Porta 0 (BT)001 = Porta 1010 = Porta 2011 = Porta 3100 = Porta 4101 = Porta 5110 = Reservado111 = Sem local
x x x x Fonte de referência
0000 = Ref A Auto0001 = Ref B Auto0010 = Pré-Progr 2 Auto0011 = Pré-Progr 3 Auto0100 = Pré-Progr 4 Auto0101 = Pré-Progr 5 Auto0110 = Pré-Progr 6 Auto0111 = Pré-Progr 7 Auto1000 = Bloco term manual1001 = DPI 1 Manual1010 = DPI 2 Manual1011 = DPI 3 Manual1100 = DPI 4 Manual1101 = DPI 5 Manual1110 = Reservado1111 = Ref Jog
(1) Consulte “Controles” na página 3-50 para obter mais informações.

Informações suplementares sobre o inversor A-7
Os núcleos de modo comum são internos ao inversor. Para informações sobre dispositivos de saída como contatores de saída, terminadores de cabo e reatores de saída, consulte o Manual de Referência do PowerFlex.
As tabelas nas páginas seguintes fornecem as classificações do inversor (incluindo contínua, de 1 minuto e de 3 segundos), e informações sobre os disjuntores e fusíveis de linha de entrada CA recomendados. Ambos os tipos de proteção contra curto-circuito são aceitos pelos requisitos da UL e IEC. Os tamanhos relacionados são aqueles recomendados baseando-se em 40 graus C e no N.E.C dos EUA. Códigos de outros países, estados ou locais podem requerer classificações diferentes.
Fusíveis
Se fusíveis forem selecionados como o método de proteção desejado, consulte os tipos recomendados relacionados abaixo. Se as classificações de corrente disponíveis não corresponderem às tabelas fornecidas, deve ser selecionada a classificação do fusível mais próxima que exceda a classificação do inversor.
• IEC – BS88 (Padrão Britânico) Partes 1 & 2(1), EN60269-1, Partes 1 & 2, tipo gG ou equivalente devem ser usadas.
• UL – UL Classe CC, T, RK1 ou J deve ser usada.
Disjuntores
As listagens “sem fusíveis” nas tabelas seguintes incluem tanto disjuntores (tempo inverso ou de disparo instantâneo) como Dispositivos de Partida de Motor com Auto-Proteção 140M. Se um destes for selecionado como o método de proteção desejado, os requerimentos seguintes se aplicarão:
• IEC e UL – Ambos os de tipos de dispositivos são aceitáveis para as instalações que atendam a IEC e UL.
Dispositivos de Saída
Classificações de fusíveis e disjuntores do inversor
(1) As designações típicas incluem, mas não estão limitadas às seguintes; Partes 1 e 2: AC, AD, BC, BD, CD, DD, ED, EFS, EF, FF, FG, GF, GG, GH.

A-8 Informações suplementares sobre o inversor
Tabela
A.A
Di
spos
itivo
s de
pro
teçã
o co
m e
ntra
da d
e 20
8 Vo
lts C
A re
com
enda
dos
(Con
sulte
as
nota
s na
pág
ina
A-13
)
Núm
ero
de
catá
logo
do
inve
rsor
Gabinete
Clas
sific
ação
de
pot
ênci
a (H
P)Fr
eq.
PWM
Tem
p.C
lass
ifica
ções
de
ent
rada
Corr
ente
de
saíd
a
Fusí
vel
de re
tard
o co
m
elem
ento
dup
loFu
síve
l sem
re
tard
o de
tem
poDi
sjun
tor(3
)
Prot
etor
de
circ
uito
do
mot
or(4
) Di
spos
itivo
de
Part
ida
de m
otor
140
M c
om fa
ixa
ajus
táve
l de
corr
ente
(5)(6
)
ND
HD
kHz
°CAm
pskV
AC
ont.
1 M
in.
3 s
Mín
.(1)
Máx
.(2)
Mín
.(1)
Máx
.(2)
Máx
.(8)
Máx
.(8)
Núm
eros
de
catá
logo
dis
poní
veis
- 14
0,..(7
)
Entra
da d
e 20
8 Vo
lts C
A20
BB2P
20
0,5
0,33
450
1,9
0,7
2,5
2,8
3,8
36
310
153
M-C
2E-B
25M
-D8E
-B25
––
20BB
4P2
01
0,75
450
3,7
1,3
4,8
5,6
7,0
610
617
,515
7M
-C2E
-B63
M-D
8E-B
63–
–20
BB6P
81
21,
54
506,
82,
47,
810
,413
,810
1510
3030
15M
-C2E
-C10
M-D
8E-C
10M
-F8E
-C10
–20
BB9P
61
32
450
9,5
3,4
1112
,117
1220
1240
4015
M-C
2E-C
16M
-D8E
-C16
M-F
8E-C
16–
20BB
015
15
34
5015
,75,
717
,519
,326
,320
3520
7070
30M
-C2E
-C20
M-D
8E-C
20M
-F8E
-C20
–20
BB02
21
7,5
54
5023
,08,
325
,327
,838
3050
3010
010
030
M-C
2E-C
25M
-D8E
-C25
M-F
8E-C
25-C
MN
-250
020
BB02
82
107,
54
5029
,610
,732
,238
50,6
4070
4012
512
550
––
M-F
8E-C
32-C
MN
-400
020
BB04
23
1510
450
44,5
16,0
48,3
53,1
72,5
6010
060
175
175
70–
–M
-F8E
-C45
-CM
N-6
300
20BB
052
320
154
5051
,517
,156
6486
8012
580
200
200
100
––
–-C
MN
-630
020
BB07
04
2520
450
7225
,978
,293
124
9017
590
300
300
100
––
–-C
MN
-900
020
BB08
04
3025
450
84,7
30,5
9211
715
611
020
011
035
035
015
0–
––
-CM
N-9
000
20BB
104
540
–4
5011
340
,712
0 13
217
515
025
015
047
535
015
0–
––
––
304
5084
,730
,592
13
817
512
520
012
535
030
015
0–
––
-CM
N-9
000
20BB
130
550
–4
5012
244
,113
014
317
517
527
517
550
037
525
0–
––
––
404
5098
35,3
104
156
175
125
225
125
400
300
150
––
––
20BB
154
660
–4
5016
760
,117
719
526
622
535
022
550
050
025
0–
––
––
504
5014
150
,915
022
530
020
030
020
050
045
025
0–
––
–20
BB19
26
75–
450
208
75,0
221
243
308
300
450
300
600
600
400
––
––
–60
450
167
60,1
177
266
308
225
350
225
500
500
250
––
––

Informações suplementares sobre o inversor A-9
Tabe
la A
.B
Disp
ositi
vos
de p
rote
ção
com
ent
rada
de
240
Volts
CA
(Con
sulte
as
nota
s na
pág
ina
A-13
)
Núm
ero
de
catá
logo
do
inve
rsor
GabineteCl
assi
ficaç
ão
de p
otên
cia
(HP)
Freq
. PW
MTe
mp.
Clas
sific
açõe
s de
ent
rada
Corr
ente
de
saíd
a
Fusí
vel
de re
tard
o co
m
elem
ento
dup
loFu
síve
l sem
re
tard
o de
tem
poDi
sjun
tor(3
)
Prot
etor
de
circ
uito
do
mot
or(4
) D
ispo
sitiv
o de
Par
tida
de m
otor
140
M c
om fa
ixa
ajus
táve
l de
corr
ente
(5)(6
)
ND
HD
kHz
°CAm
pskV
AC
ont.
1 M
in.
3 s
Mín
.(1)
Máx
.(2)
Mín
.(1)
Máx
.(2)
Máx
.(8)
Máx
.(8)
Núm
eros
de
catá
logo
dis
poní
veis
- 14
0,..(7
)
Entra
da d
e 24
0 Vo
lts C
A20
BB2P
20
0,5
0,33
450
1,7
0,7
2,2
2,4
3,3
36
310
153
M-C
2E-B
25M
-D8E
-B25
––
20BB
4P2
01
0,75
450
3,3
1,4
4,2
4,8
6,4
58
515
157
M-C
2E-B
63M
-D8E
-B63
––
20BB
6P8
12
1,5
450
5,9
2,4
6,8
912
1015
1025
2515
M-C
2E-C
10M
-D8E
-C10
M-F
8E-C
10–
20BB
9P6
13
24
508,
33,
49,
610
,614
,412
2012
3535
15M
-C2E
-C10
M-D
8E-C
10M
-F8E
-C10
–20
BB01
51
53
450
13,7
5,7
15,3
16,8
2320
3020
6060
30M
-C2E
-C16
M-D
8E-C
16M
-F8E
-C16
–20
BB02
21
7,5
54
5019
,98,
322
24,2
3325
5025
8080
30M
-C2E
-C25
M-D
8E-C
25M
-F8E
-C25
-CM
N-2
500
20BB
028
210
7,5
450
25,7
10,7
2833
4435
6035
100
100
50–
–M
-F8E
-C32
-CM
N-4
000
20BB
042
315
104
5038
,516
,042
46,2
6350
9050
150
150
50–
–M
-F8E
-C45
-CM
N-6
300
20BB
052
320
154
5047
,719
,852
6380
6010
060
200
200
100
––
–-C
MN
-630
020
BB07
04
2520
450
64,2
26,7
7078
105
9015
090
275
275
100
––
–-C
MN
-900
020
BB08
04
3025
450
73,2
30,5
8010
514
010
018
010
030
030
010
0–
––
-CM
N-9
000
20BB
104
540
–4
5098
40
,610
411
517
512
522
512
540
030
015
0–
––
––
304
5073
30
,580
120
160
100
175
100
300
300
100
––
–-C
MN
-900
020
BB13
05
50–
450
122
50,7
130
143
175
175
275
175
500
375
250
––
––
–40
450
9840
,610
415
617
512
522
512
540
030
015
0–
––
–20
BB15
46
60–
450
145
60,1
154
169
231
200
300
200
600
450
250
––
––
–50
450
122
50,7
130
195
260
175
275
175
500
375
250
––
––
20BB
192
675
–4
5018
074
,919
221
128
822
540
022
560
057
525
0–
––
––
604
5014
560
,115
423
130
820
030
020
060
045
025
0–
––
–

A-10 Informações suplementares sobre o inversor
Tabela
A.C
Di
spos
itivo
s de
pro
teçã
o co
m e
ntra
da d
e 40
0 Vo
lts C
A (C
onsu
lte a
s no
tas
na p
ágin
a A-
13)
Núm
ero
de
catá
logo
do
inve
rsor
Gabinete
Cla
ssifi
caçã
o de
pot
ênci
a (k
w)
Freq
. PW
MTe
mp.
Clas
sific
açõe
s de
ent
rada
Corr
ente
de
saíd
a
Fusí
vel
de re
tard
o co
m
elem
ento
dup
loFu
síve
l sem
re
tard
o de
tem
poDi
sjun
tor(3
)
Prot
etor
de
circ
uito
do
mot
or(4
) D
ispo
sitiv
o de
Par
tida
de m
otor
140
M c
om fa
ixa
ajus
táve
l de
corr
ente
(5)(6
)
ND
HD
kHz
°CAm
pskV
AC
ont.
1 M
in.
3 s
Mín
.(1)
Máx
.(2)
Mín
.(1)
Máx
.(2)
Máx
.(8)
Máx
.(8)
Núm
eros
de
catá
logo
dis
poní
veis
- 14
0,..(7
)
Entra
da d
e 40
0 Vo
lts C
A20
BC1P
30
0,37
0,25
450
1,1
0,77
1,3
1,4
1,9
33
36
153
M-C
2E-B
16 –
– –
20BC
2P1
00,
750,
554
501,
81,
32,
12,
43,
23
63
815
3M
-C2E
-B25
M-D
8E-B
25 –
–20
BC3P
50
1,5
0,75
450
3,2
2,2
3,5
4,5
6,0
67
612
157
M-C
2E-B
40M
-D8E
-B40
– –
20BC
5P0
02,
21,
54
504,
63,
25,
05,
57,
56
106
2020
7M
-C2E
-B63
M-D
8E-B
63 –
–20
BC8P
70
42,
24
507,
95,
58,
79,
913
,215
17,5
1530
3015
M-C
2E-C
10M
-D8E
-C10
M-F
8E-C
10 –
20BC
011
05,
54
450
10,8
7,5
11,5
1317
,415
2515
4545
15M
-C2E
-C16
M-D
8E-C
16M
-F8E
-C16
–20
BC01
51
7,5
5,5
450
14,4
10,0
15,4
17,2
23,1
2030
2060
6020
M-C
2E-C
20M
-D8E
-C20
M-F
8E-C
20 –
20BC
022
111
7,5
450
20,6
14,3
2224
,233
3045
3080
8030
M-C
2E-C
25M
-D8E
-C25
M-F
8E-C
25 –
20BC
030
215
114
5028
,419
,730
3345
3560
3512
012
050
– –
M-F
8E-C
32 –
20BC
037
218
,515
450
35,0
24,3
3745
6045
8045
125
125
50 –
–M
-F8E
-C45
–20
BC04
33
2218
,54
5040
,728
,243
5674
6090
6015
015
060
– –
– –
20BC
056
330
224
5053
36,7
5664
8670
125
7020
020
010
0 –
– –
–20
BC07
23
3730
450
68,9
47,8
7284
112
9015
090
250
250
100
– –
– –
20BC
085
445
–4
4581
,456
,485
9412
811
020
011
030
030
015
0 –
– –
––
374
4568
,947
,872
108
144
9017
590
275
300
100
– –
– –
20BC
105
555
–4
5010
0,5
69,6
105
116
158
125
225
125
400
300
150
– –
– –
–45
450
81,4
56,4
8512
817
011
017
511
030
030
015
0 –
– –
–20
BC12
55
55–
450
121,
183
,912
513
816
315
027
515
050
037
525
0 –
– –
––
454
5091
,963
,796
144
168
125
200
125
375
375
150
– –
– –
20BC
140
575
–4
4013
693
,914
015
419
020
030
020
040
040
025
0 –
– –
––
554
4010
169
,610
515
719
015
022
515
030
030
015
0 –
– –
–20
BC17
06
90–
450
164
126
170
187
255
250
375
250
600
500
250
– –
– –
–75
450
136
103
140
210
280
200
300
200
550
400
250
– –
– –
20BC
205
611
0–
440
199
148
205
220
289
250
450
250
600
600
400
– –
– –
–90
440
164
126
170
255
313
250
375
250
600
500
250
– –
– –
20BC
260
613
2–
240
255
177
260
286
390
350
550
350
750
750
400
– –
– –
–11
02
5019
913
820
530
841
025
045
025
060
060
040
0 –
– –
–

Informações suplementares sobre o inversor A-11
Tabe
la A
.D
Disp
ositi
vos
de p
rote
ção
com
ent
rada
de
480
Volts
CA
(Con
sulte
as
nota
s na
pág
ina
A-13
)
Núm
ero
de
catá
logo
do
inve
rsor
GabineteCl
assi
ficaç
ão
de p
otên
cia
(HP)
Freq
. PW
MTe
mp.
Clas
sific
açõe
s de
ent
rada
Cor
rent
e de
saí
da
Fusí
vel
de re
tard
o co
m
elem
ento
dup
loFu
síve
l sem
re
tard
o de
tem
poDi
sjun
tor(3
)
Prot
etor
de
circ
uito
do
mot
or(4
) Di
spos
itivo
de
Part
ida
de m
otor
140
M c
om fa
ixa
ajus
táve
l de
corr
ente
(5)(6
)
ND
HD
kHz
°CAm
pskV
AC
ont.
1 M
in.
3 s
Mín
.(1)
Máx
.(2)
Mín
.(1)
Máx
.(2)
Máx
.(8)
Máx
.(8)
Núm
eros
de
catá
logo
dis
poní
veis
- 14
0,..(7
)
Entra
da d
e 48
0 Vo
lts C
A20
BD1P
10
0,5
0,33
450
0,9
0,7
1,1
1,2
1,6
33
36
153
M-C
2E-B
16 –
– –
20BD
2P1
01
0,75
450
1,6
1,4
2,1
2,4
3,2
36
38
153
M-C
2E-B
25 –
– –
20BD
3P4
02
1,5
450
2,6
2,2
3,4
4,5
6,0
48
412
157
M-C
2E-B
40M
-D8E
-B40
– –
20BD
5P0
03
24
503,
93,
25,
05,
57,
56
106
2020
7M
-C2E
-B63
M-D
8E-B
63 –
–20
BD8P
00
53
450
6,9
5,7
8,0
8,8
1210
1510
3030
15M
-C2E
-C10
M-D
8E-C
10M
-F8E
-C10
–20
BD01
10
7,5
54
509,
57,
911
12,1
16,5
1520
1540
4015
M-C
2E-C
16M
-D8E
-C16
M-F
8E-C
16 –
20BD
014
110
7,5
450
12,5
10,4
1416
,522
17,5
3017
,550
5020
M-C
2E-C
16M
-D8E
-C16
M-F
8E-C
16 –
20BD
022
115
104
5019
,916
,622
24,2
3325
5025
8080
30M
-C2E
-C25
M-D
8E-C
25M
-F8E
-C25
-CM
N-2
500
20BD
027
220
154
5024
,820
,627
3344
3560
3510
010
050
– –
M-F
8E-C
32-C
MN
-400
020
BD03
42
2520
450
31,2
25,9
3440
,554
4070
4012
512
550
– –
M-F
8E-C
45-C
MN
-400
020
BD04
03
3025
450
36,7
30,5
4051
6850
9050
150
150
50 –
–M
-F8E
-C45
-CM
N-4
000
20BD
052
340
304
5047
,739
,752
6080
6011
060
200
200
70 –
– –
-CM
N-6
300
20BD
065
350
404
5059
,649
,665
7810
480
125
8025
025
010
0 –
– –
-CM
N-9
000
20BD
077
460
–4
5072
,360
,177
8511
610
017
010
030
030
010
0 –
– –
-CM
N-9
000
–50
450
59,6
49,6
6598
130
8012
580
250
250
100
– –
–-C
MN
-900
020
BD09
65
75–
450
90,1
74,9
9610
614
412
520
012
535
035
012
5 –
– –
––
604
5072
,360
,177
116
154
100
170
100
300
300
100
– –
–-C
MN
-900
020
BD12
55
100
–4
5011
797
,612
513
816
315
025
015
050
037
515
0 –
– –
––
754
5090
,174
,996
144
168
125
200
125
350
350
125
– –
– –
20BD
156
612
5–
450
147
122
156
172
234
200
350
200
600
450
250
– –
– –
–10
04
5013
110
912
518
825
017
525
017
550
037
525
0 –
– –
–20
BD18
06
150
–4
5016
914
118
019
827
022
540
022
560
050
025
0 –
– –
––
125
450
147
122
156
234
312
200
350
200
600
450
250
– –
– –
20BD
248
620
0–
240
233
194
248
273
372
300
550
300
700
700
400
– –
– –
–15
02
5016
914
118
027
036
022
540
022
560
050
025
0 –
– –
–

A-12 Informações suplementares sobre o inversor
Tabela
A.E
Di
spos
itivo
s de
pro
teçã
o co
m e
ntra
da d
e 60
0 Vo
lts C
A (C
onsu
lte a
s no
tas
na p
ágin
a A-
13)
Núm
ero
de
catá
logo
do
inve
rsor
Gabinete
Clas
sific
ação
de
pot
ênci
a (H
P)Fr
eq.
PWM
Tem
p.Cl
assi
ficaç
ões
de e
ntra
daCo
rren
te d
e sa
ída
Fusí
vel
de re
tard
o co
m
elem
ento
dup
loFu
síve
l sem
re
tard
o de
tem
poD
isju
ntor
(3)
Prot
etor
de
circ
uito
do
mot
or(4
) Di
spos
itivo
de
Part
ida
de m
otor
140
M c
om fa
ixa
ajus
táve
l de
corr
ente
(5)(6
)
ND
HD
kHz
°CAm
pskV
AC
ont.
1 M
in.
3 s
Mín
.(1)
Máx
.(2)
Mín
.(1)
Máx
.(2)
Máx
.(8)
Máx
.(8)
Núm
eros
de
catá
logo
dis
poní
veis
- 14
0,..(7
)
Entra
da d
e 60
0 Vo
lts C
A20
BE1P
70
10,
54
501,
31,
41,
72
2,6
24
26
153
M-C
2E-B
16–
––
20BE
2P7
02
14
502,
12,
12,
73,
64,
83
63
1015
3M
-C2E
-B25
––
–20
BE3P
90
32
450
3,0
3,1
3,9
4,3
5,9
69
615
157
M-C
2E-B
40M
-D8E
-B40
––
20BE
6P1
05
34
505,
35,
56,
16,
79,
29
129
2020
15M
-C2E
-B63
M-D
8E-B
63–
–20
BE9P
00
7,5
54
507,
88,
19
9,9
13,5
1020
1035
3015
M-C
2E-C
10M
-D8E
-C10
M-F
8E-C
10–
20BE
011
110
7,5
450
9,9
10,2
1113
,518
1525
1540
4015
M-C
2E-C
10M
-D8E
-C10
M-F
8E-C
10–
20BE
017
115
104
5015
,416
,017
18,7
25,5
2040
2060
5020
M-C
2E-C
16M
-D8E
-C16
M-F
8E-C
16–
20BE
022
220
154
5020
,221
,022
25,5
3430
5030
8080
30M
-C2E
-C25
M-D
8E-C
25M
-F8E
-C25
-CM
N-2
500
20BE
027
225
204
5024
,825
,727
3344
3560
3510
010
050
––
M-F
8E-C
25-C
MN
-250
020
BE03
23
3025
450
29,4
30,5
3240
,554
4070
4012
512
550
––
M-F
8E-C
32-C
MN
-400
020
BE04
13
4030
450
37,6
39,1
4148
6450
9050
150
150
100
––
M-F
8E-C
45-C
MN
-400
020
BE05
23
5040
450
47,7
49,6
5261
,582
6011
060
200
200
100
––
–-C
MN
-630
020
BE06
24
6050
250
58,2
60,5
6278
104
8012
580
225
225
100
––
–-C
MN
-630
020
BE07
75
75–
250
72,3
75,1
7785
116
9015
090
300
300
100
––
–-C
MN
-900
0–
602
5058
,260
,563
9412
690
125
9025
025
010
0–
––
-CM
N-6
300
20BE
099
510
0–
240
92,9
96,6
9910
912
612
520
012
537
537
515
0–
––
––
752
4072
,375
,177
116
138
100
175
100
300
300
100
––
–-C
MN
-900
020
BE12
56
125
–2
5011
712
212
513
818
815
025
015
037
537
525
0–
––
––
100
250
9396
,699
149
198
125
200
125
375
375
150
––
––
20BE
144
615
0–
250
135
141
144
158
216
175
300
175
400
400
250
––
––
–12
52
5011
712
212
518
825
015
027
515
037
537
525
0–
––
–

Informações suplementares sobre o inversor A-13
Tabe
la A
.F
Dis
posi
tivos
de
prot
eção
com
ent
rada
de
690
Volts
CA
Nota
s:(1
)O
tam
anho
mín
imo
do d
ispo
sitiv
o de
pro
teçã
o é
o di
spos
itivo
com
a m
enor
cla
ssifi
caçã
o qu
e of
ereç
a pr
oteç
ão m
áxim
a se
m d
ispa
ros
inde
seja
dos.
(2)
O ta
man
ho m
áxim
o do
dis
posi
tivo
de p
rote
ção
é o
disp
ositi
vo c
om c
lass
ifica
ção
mai
s el
evad
a qu
e of
ereç
a pr
oteç
ão a
o in
vers
or. P
ara
o N
EC (C
ódig
o El
étric
o N
acio
nal)
dos
EUA,
o ta
man
ho m
ínim
o é
125%
da
corre
nte
de p
lena
car
ga (I
.nom
) do
mot
or. A
s cl
assi
ficaç
ões
indi
cada
s sã
o as
máx
imas
.(3
)D
isju
ntor
– d
isju
ntor
de
tem
po in
vers
o. P
ara
o N
EC (C
ódig
o El
étric
o N
acio
nal)
dos
EUA,
o ta
man
ho m
ínim
o é
125%
da
corre
nte
de p
lena
car
ga (I
.nom
) do
mot
or. A
s cl
assi
ficaç
ões
indi
cada
s sã
o as
máx
imas
.(4
)Pr
otet
or d
e ci
rcui
to d
o m
otor
– d
isju
ntor
de
disp
aro
inst
antâ
neo.
Par
a o
NEC
(Cód
igo
Elét
rico
Nac
iona
l) do
s EU
A, o
tam
anho
mín
imo
é 12
5% d
a ca
paci
dade
nom
inal
(I.n
om) d
o m
otor
. As
clas
sific
açõe
s in
dica
das
são
as m
áxim
as.
(5)
O B
ulle
tin 1
40M
com
faix
a aj
ustá
vel d
e co
rrent
e de
ve te
r o d
ispa
ro d
e co
rrent
e aj
usta
do p
ara
a fa
ixa
mín
ima
na q
ual o
dis
posi
tivo
não
disp
are.
(6)
Con
trola
dor m
anua
l de
mot
or c
ombi
nado
com
aut
opro
teçã
o (T
ipo
E), r
elac
iona
do p
ela
UL
para
liga
ção
208
estre
la o
u de
lta, 2
40 e
stre
la o
u de
lta, 4
80Y/
277
ou 6
00Y/
347.
Não
rela
cion
ado
pela
UL
para
uso
em
si
stem
as 4
80V
ou 6
00V
delta
/del
ta.
(7)
As c
lass
ifica
ções
AIC
do
prot
etor
de
mot
or d
o Bu
lletin
140
M p
odem
var
iar.
Con
sulte
a p
ublic
ação
140
M-S
G00
1B-E
N-P
.(8
)C
lass
ifica
ção
máx
ima
perm
itida
pel
o C
ódig
o El
étric
o N
acio
nal d
os E
UA (U
S N
EC).
Dev
e-se
sel
ecio
nar o
tam
anho
exa
to p
ara
cada
inst
alaç
ão.
Núm
ero
de
catá
logo
do
inve
rsor
GabineteCl
assi
ficaç
ão
de p
otên
cia
(kW
)Fr
eq.
PWM
Tem
p.C
lass
ifica
ções
de
ent
rada
Corr
ente
de
saíd
a
Fusí
vel
de re
tard
o co
m
elem
ento
dup
loFu
síve
l sem
re
tard
o de
tem
poDi
sjun
tor(3
)
Prot
etor
de
circ
uito
do
mot
or(4
) N
DH
DkH
z°C
Amps
kVA
Con
t.1
Min
.3
sM
ín.(1
) M
áx.(2
) M
ín.(1
) M
áx.(2
) M
áx.(8
) M
áx.(8
)
Entra
da d
e 69
0 Vo
lts C
A20
BF05
25
45–
450
46,9
56,1
5257
7860
110
6017
517
5–
–37
,54
5040
,148
,046
6992
5090
5015
015
0–
20BF
060
555
–4
5057
,768
,960
6690
8012
580
225
225
––
454
5046
,956
,152
7810
460
110
6017
517
5–
20BF
082
575
–2
5079
,094
,482
9012
310
020
010
037
537
5–
–55
250
57,7
68,9
6090
120
8012
580
225
225
–20
BF09
85
90–
240
94,7
113
9810
812
712
520
012
537
537
5–
–75
240
79,0
94,4
8212
314
010
020
010
037
537
5–
20BF
119
611
0–
250
115
137
119
131
179
150
250
150
400
––
–90
250
94,7
113
9814
719
612
520
012
537
5–
–20
BF14
26
132
–2
5013
816
514
215
621
317
530
017
545
0–
––
110
250
115
137
119
179
238
150
250
150
400
––

A-14 Informações suplementares sobre o inversor
Tabela A.G Dispositivos de proteção com entrada de 540 Volts CC
Tabela A.H Dispositivos de proteção com entrada de 650 Volts CC
Número de catálogo do inversor G
abin
ete Classificação
de potência (kW)
Classificações de entrada CC Corrente de saída
Fusível Fusível BussmannND HD Amps kW Cont. 1 Min. 3 s
Entrada de 540 Volts CC20BC1P3 1 0,37 0,25 1,3 0,7 1,3 1,4 1,9 3 BUSSMANN_JKS-320BC2P1 1 0,75 0,55 2,1 1,1 2,1 2,4 3,2 6 BUSSMANN_JKS-620BC3P5 1 1,5 0,75 3,7 2,0 3,5 4,5 6,0 8 BUSSMANN_JKS-820BC5P0 1 2,2 1,5 5,3 2,9 5,0 5,5 7,5 10 BUSSMANN_JKS-1020BC8P7 1 4 3,0 9,3 5,0 8,7 9,9 13,2 20 BUSSMANN_JKS-2020BC011 1 5,5 4 12,6 6,8 11,5 13 17,4 25 BUSSMANN_JKS-2520BC015 1 7,5 5,5 16,8 9,1 15,4 17,2 23,1 30 BUSSMANN_JKS-3020BC022 1 11 7,5 24 13 22 24,2 33 45 BUSSMANN_JKS-4520BC030 2 15 11 33,2 17,9 30 33 45 60 BUSSMANN_JKS-6020BC037 2 18,5 15 40,9 22,1 37 45 60 80 BUSSMANN_JKS-8020BC043 3 22 18,5 47,5 25,7 43 56 74 90 BUSSMANN_JKS-9020BC056 3 30 22 61,9 33,4 56 64 86 110 BUSSMANN_JKS-11020BC072 3 37 30 80,5 43,5 72 84 112 150 BUSSMANN_JKS-15020BC085 4 – 37 80,5 43,5 72 108 144 150 BUSSMANN_JKS-150
45 – 95,1 51,3 85 94 128 200 BUSSMANN_JKS-20020BH105 (1)
(1)Também se aplica à classe de tensão “P”.
5 – 45 95,1 51,3 85 128 170 200 BUSSMANN_JKS-20055 – 117,4 63,4 105 116 158 200 BUSSMANN_JKS-200
20BH125 (1) 5 – 45 91,9 63,7 96 144 168 15055 – 139,8 75,5 125 138 163 225 BUSSMANN_JKS-225
20BH140 (1) 6 – 55 117,4 63,4 105 158 210 200 BUSSMANN_JKS-20075 – 158,4 85,6 140 154 210 300 BUSSMANN_JKS-300
20BH170 (1) 6 – 75 158,4 85,6 140 210 280 300 BUSSMANN_JKS-30090 – 192,4 103,9 170 187 255 350 BUSSMANN_JKS-350
20BH205 (1) 6 – 90 192,4 103,9 170 255 313 350 BUSSMANN_JKS-350110 – 232 125,3 205 220 289 400 BUSSMANN_JKS-400
Número de catálogo do inversor G
abin
ete Classificação
de potência (kW)
Classificações de entrada CC Corrente de saída
Fusível Fusível BussmannND HD Amps kW Cont. 1 Min. 3 s
Entrada de 650 Volts CC20BD1P1 0 0,5 0,33 1,0 0,6 1,1 1,2 1,6 6 BUSSMANN_JKS-620BD2P1 0 1 0,75 1,9 1,2 2,1 2,4 3,2 6 BUSSMANN_JKS-620BD3P4 0 2 1,5 3,0 2,0 3,4 4,5 6,0 6 BUSSMANN_JKS-620BD5P0 0 3 2 4,5 2,9 5,0 5,5 7,5 10 BUSSMANN_JKS-1020BD8P0 0 5 3 8,1 5,2 8,0 8,8 12 15 BUSSMANN_JKS-1520BD011 0 7,5 5 11,1 7,2 11 12,1 16,5 20 BUSSMANN_JKS-2020BD014 1 10 7,5 14,7 9,5 14 16,5 22 30 BUSSMANN_JKS-3020BD022 1 15 10 23,3 15,1 22 24,2 33 45 BUSSMANN_JKS-4520BD027 2 20 15 28,9 18,8 27 33 44 60 BUSSMANN_JKS-6020BD034 2 25 20 36,4 23,6 34 40,5 54 70 BUSSMANN_JKS-7020BD040 3 30 25 42,9 27,8 40 51 68 80 BUSSMANN_JKS-8020BD052 3 40 30 55,7 36,1 52 60 80 100 BUSSMANN_JKS-10020BD065 3 50 40 69,7 45,4 65 78 104 150 BUSSMANN_JKS-15020BR077 (1) 4 – 50 67,9 45,4 65 98 130 150 BUSSMANN_JKS-150
4 60 – 84,5 54,7 77 85 116 150 BUSSMANN_JKS-15020BR096 (1) 5 – 60 84,5 54,7 77 116 154 150 BUSSMANN_JKS-150
75 – 105,3 68,3 96 106 144 200 BUSSMANN_JKS-200

Informações suplementares sobre o inversor A-15
Figura A.3 PowerFlex 700 Gabinetes 0-3 (Ilustração do gabinete 0)
As dimensões estão indicadas em milímetros e (polegadas).
20BR125 (1) 5 – 75 105,3 68,3 96 144 168 200 BUSSMANN_JKS-200100 – 137,1 88,9 125 138 163 250 BUSSMANN_JKS-250
20BR156 (1) 6 – 100 137,1 88,9 125 188 250 250 BUSSMANN_JKS-250125 – 171,2 110,9 156 172 234 300 BUSSMANN_JKS-300
20BR180 (1) 6 – 125 171,2 110,9 156 234 312 300 BUSSMANN_JKS-300150 – 204,1 132,2 180 198 270 400 BUSSMANN_JKS-400
(1)Também se aplica à classe de tensão “J”.
Número de catálogo do inversor G
abin
ete Classificação
de potência (kW)
Classificações de entrada CC Corrente de saída
Fusível Fusível BussmannND HD Amps kW Cont. 1 Min. 3 s
Dimensões
C
AD15,0 (0,59)
Diâmetro de 5,8 (0,23) veja abaixo
E
8,0(0,31)
5,5 (0,22) - Gabinetes 0-17,0 (0,28) - Gabinetes 2-33 locais
B
HOT surfaces can cause severe burns
CAUTION
Gab
inet
e(1)
A B C D E
Peso (2) kg (lb.)
InversorInversor e embalagem
0 110,0 (4,33) 336,0 (13,23) 200,0 (7,87) 80,0 (3,15) 320,0 (12,60) 5,22 (11,5) 8,16 (18)1 135,0 (5,31) 336,0 (13,23) 200,0 (7,87) 105,0 (4,13) 320,0 (12,60) 7,03 (15,5) 9,98 (22)2 222,0 (8,74) 342,5 (13,48) 200,0 (7,87) 192,0 (7,56) 320,0 (12,60) 12,52 (27,6) 15,20 (33,5)3 222,0 (8,74) 517,5 (20,37) 200,0 (7,87) 192,0 (7,56) 500,0 (19,69) 18,55 (40,9) 22,68 (50)
(1) Consulte a Tabela A.I para obter informações sobre gabinetes.(2) Os pesos incluem a HIM e E/S Padrão.

A-16 Informações suplementares sobre o inversor
Figura A.4 Gabinete 4 do inversor PowerFlex 700
As dimensões estão indicadas em milímetros e (polegadas).
C
E
8,0(0,31)
B
Diâmetro de 7,0 (0,28)
7,0 (0,28)3 locais
A
D15,0 (0,59)
Orifícios para elevação4 locais
Gab
inet
e(1)
A (Máx.) B C (Máx.) D E
Peso aproximado (2) kg (lb.)
InversorInversor e embalagem
4 220,0 (8,66) 758,8 (29,87) 201,7 (7,94) 192,0 (7,56) 738,2 (29,06) 24,49 (54,0) 29,03 (64,0)
(1) Consulte a Tabela A.I para obter informações sobre gabinetes.(2) Os pesos incluem a HIM e E/S Padrão.

Informações suplementares sobre o inversor A-17
Figura A.5 Gabinete 5 do inversor PowerFlex 700
As dimensões estão indicadas em milímetros e (polegadas).
HOT surfaces can cause severe burns
CAUTION
E
12,5(0,49)
6,5 (0,26)
B
D
A
259,1 (10,20)
Detalhe
15,0 (0,59)
6,5 (0,26)
37,6 (1,48)
C
Orifícios para elevação - 4 locaisDiâmetro de 12,7 (0,50)
Gab
inet
e(1)
A (Máx.) B C (Máx.) D E
Peso aproximado (2) kg (lb.)
InversorInversor e embalagem
5 308,9 (12,16) 644,5 (25,37)(3) 275,4 (10,84) 225,0 (8,86) 625,0 (24,61) 37,19 (82,0) 42,18 (93,0)
(1) Consulte a Tabela A.I para obter informações sobre gabinetes.(2) Os pesos incluem a HIM e E/S Padrão.(3) Ao usar a caixa de derivação fornecida (somente inversores de 100 HP), adicione 45,1 mm (1,78 pol.) a esta dimensão.

A-18 Informações suplementares sobre o inversor
Figura A.6 Gabinete 6 do inversor PowerFlex 700
As dimensões estão indicadas em milímetros e (polegadas).
E
13,5 (0,53)126,3(4,97)
8,5 (0,33)
B
Orifícios para elevação - 4 locaisDiâmetro de 12,7 (0,50)
D C
A
360,6 (14,20) Detalhe
18,0 (0,71)
8,5 (0,33)
49,6 (1,95)
Gab
inet
e(1)
A (Máx.) B C (Máx.) D E
Peso aproximado (2) kg (lb.)
InversorInversor e embalagem
6 403,9 (15,90) 850,0 (33,46) 275,5 (10,85) 300,0 (11,81) 825,0 (32,48) 71,44 (157,5)(3) 91,85 (202,5) (3)
(1) Consulte a Tabela A.I para obter informações sobre gabinetes.(2) Os pesos incluem a HIM e E/S Padrão.(3) Adicione 3,6 kg (8 libras) para os inversores de 200 HP.

Informações suplementares sobre o inversor A-19
Figura A.7 Dimensões da vista inferior do PowerFlex 700
Gabinete Classificação Dimensões0 Todos
1 Todos
2 Todos
132,9(5,23)
187,5(7,38)
30,2(1,19)
41,9 (1,65)56,1 (2,21)
96,0 (3,78)75,9 (2,99)
96,0 (3,78)
55,0 (2,17)75,0 (2,95)
35,0 (1,38)Diâmetro de 22,2 (0,87) – 4 locais
185,0(7,28)
133,3(5,25)
187,6(7,39)
25,5(1,00)
70,0 (2,76)43,0 (1,69)
96,0 (3,78)75,9 (2,99)
108,5 (4,27)
67,5 (2,66)47,5 (1,87)
87,5 (3,44)
Diâmetro de 22,2 (0,87) 3 locaisDiâmetro de 28,6 (1,13)
185,1(7,29)
162,3(6,39)
39,3 (1,55)
57,2 (2,25)72,7 (2,86)
106,0 (4,17)
139,4 (5,49)
177,4 (6,98)
167,5 (6,59)
156,9 (6,18)
150,9(5,94)
184,8(7,28)
157,5(6,20)
112,1(4,41)
Diâmetro de 22,4 (0,88)2 locais
Diâmetro de 28,7 (1,13)3 locais

A-20 Informações suplementares sobre o inversor
3 Todos,exceto 50 HP, 480V (37 kW, 400V)
50 HP, 480V (37 kW, 400V) Inversor de regime de serviço normal
4 Todos
Gabinete Classificação Dimensões
66,0 (2,60)
94,7 (3,73)
105,3 (4,15)
97,0 (3,82)
137,2 (5,40)
187,0 (7,36)
22,7 (0,89)
29,0 (1,14)
127,7(5,03)
151,1(5,95)
160,1(6,30)
165,1(6,50)
184,5(7,26)
Diâmetro de 22,2 (0,87)
Diâmetro de 28,7 (1,13)2 locais
Diâmetro de 37,3 (1,47)2 locais
66,0 (2,60)
94,7 (3,73)
105,3 (4,15)
130,0 (5,12)
186,0 (7,32)
22,7 (0,89)
29,0 (1,14)
127,7(5,03)
160,1(6,30)
165,1(6,50)
184,5(7,26)
Diâmetro de 28,7 (1,13)2 locais
Diâmetro de 46,7 (1,84)2 locais
Diâmetro de 34,9 (1,37)2 locais
Placa deventilação
Diâmetro de 54,1 (2,13)2 locais
Diâmetro de 47,0 (1,85)2 locais
Diâmetro de 28,7 (1,13)2 locais
26,8 (1,06)
36,8 (1,45)
50,7 (2,00)
141,9(5,59)
105,1(4,14)
157,9(6,21)
177,9(7,00)
189,7(7,47)
Diâmetro de 22,2 (0,87)
63,8 (2,51)
112,0 (4,41)
180,0 (7,09)
65,3 (2,57)
76,0 (2,99)

Informações suplementares sobre o inversor A-21
5 75 HP, 480V (55kW, 400V) Inversor de regime de serviço normal
100 HP, 480V Inversor de regime de serviço normal
Gabinete Classificação Dimensões
96,0(3,78)
159,5(6,28)
184,0(7,24)
220,0(8,66)
229,5(9,04)
241,9(9,52)
45,0 (1,77)
85,0 (3,35)
93,2 (3,67)
104,0 (4,09)
150,0 (5,91)215,0 (8,46)
255,0 (10,04)
28,0 (1,10)
Diâmetro de 22,2 (0,87)2 locais
Diâmetro de 62,7 (2,47)2 locais
Diâmetro de 34,9 (1,37)2 locais
96,0(3,78)
153,5(6,04)
184,3(7,26)
188,5(7,42)
223,5(8,80)
241,9(9,52)
44,0 (1,73)
66,4 (2,61)
31,9 (1,26)
42,6 (1,68)
128,0 (5,04)232,3 (9,15)
28,0 (1,10)
Diâmetro de 22,2 (0,87)2 locais
Diâmetro de 62,7 (2,47)2 locais
Caixa de derivação removível
Diâmetro de 34,9 (1,37)

A-22 Informações suplementares sobre o inversor
Tabela A.I Gabinetes do PowerFlex 700
6 Todos
Gabinete Classificação Dimensões
116,6(4,59)
148,5(5,85)
222,3(8,75)
242,0(9,53)
219,0(8,62)
185,4(7,30)
151,8(5,98)
52,1 (2,05)
69,1 (2,72)130,1 (5,12)
280,1 (11,03)330,1 (13,00)
230,1 (9,06)
47,1 (1,85)
45,6 (1,80)
56,2 (2,21)
Caixa de derivação removível
Diâmetro de 22,2 (0,87)4 locaisDiâmetro de 62,7 (2,47)
3 locais
Diâmetro de 34,9 (1,37)3 locais
Referência cruzada dos gabinetes
Gab
inet
e Entrada CA Entrada CC208/240V 400V 480V 600V 540V 650V
ND HP HD HP ND kW HD kW ND HP HD HP ND HP HD HP ND HP HD HP ND HP HD HP0 0,5 0,33 0,37 0,25 0,5 0,33 – – 0,37 0,25 0,5 0,33
1 0,75 0,75 0,55 1 0,75 – – 0,75 0,55 1 0,75– – 1,5 0,75 2 1,5 – – 1,5 0,75 2 1,5– – 2,2 1,5 3 2 – – 2,2 1,5 3 2– – 4 2,2 5 3 – – 4 2,2 5 3– – 5,5 4 7,5 5 – – 5,5 4 7,5 5
1 2 1,5 7,5 5,5 10 7,5 10 7,5 7,5 5,5 10 7,53 2 11 7,5 15 10 15 10 11 7,5 15 105 3 – – – – – – – – – –7,5 5 – – – – – – – – – –
2 10 7,5 15 11 20 15 20 15 15 11 20 15– – 18,5 15 25 20 25 20 18,5 15 25 20
3 15 10 22 18,5 30 25 30 25 22 18,5 30 2520 15 30 22 40 30 40 30 30 22 40 30– – 37 30 50 40 50 40 37 30 50 40
4 25 20 45 37 60 50 60 50 45 37 60 5030 25 – – – – – – – – – –
5 40 30 55 45 75 60 75 60 55 45 75 6050 40 – – 100 75 100 75 – – 100 75
6 60 50 75 55 125 100 – – 75 55 125 10075 60 90 75 150 125 – – 90 75 150 125– – 110 90 – – – – 110 90 – –

Apêndice B
Visão Geral da HIM
O PowerFlex 700 fornece uma variedade de pontos de conexão de cabos (Ilustração do Gabinete).
Para informações sobre...Consulte a página... Para informações sobre..
Consulte a página...
Conexões Externas e Internas B-1 Estrutura do Menu B-3
Elementos de Display do LCD B-2 Visualização e Edição de Parâmetros B-5
Funções ALT B-2 Remoção/Instalação da HIM B-8
Conexões Externas e Internas
No. Conector Descrição
➊ Porta DPI 1 Conexão da HIM quando instalada na tampa.
➋ Porta DPI 2 Conexão de cabos para opções portátil e remota.
➌ Porta DPI 3 ou 2 Cabo divisor conectado à Porta DPI 2 fornece uma porta adicional.
➍ Porta DPI 5 Conexão do cabo para o adaptador de comunicações.
BR1
BR2
DC+
DC–
PE
U/T1
V/T2
W/T3
R/L1
S/L2
T/L3
Módulo decomunicações
opcional
Use 75C Wire Only
#10-#14 AWG
Torque to 7 in-lbs
! DANGER
2
1or3
➊
➋➍
➌

B-2 Visão Geral da HIM
A linha superior de display da HIM pode ser configurada com o parâmetro 299, [Selecao Fdbk DPI] (Firmware de vetor com a versão 3.xxx e posteriores).
Para usar uma função ALT, pressione a tecla ALT, solte-a, e em seguida pressione a tecla de programação associada a uma das funções seguintes:
Tabela B.A Funções da Tecla ALT
Elementos de Display do LCD
Display Descrição
Direção ⎥ Status do Inversor ⎥ Alarme ⎥ Auto/Manual ⎥ Informações
Freqüência Comandada ou de Saída
Programação / Monitoração / Identificação e Solução de Problemas
F->Perda de potência
Auto
0,0 Hz
Menu Principal:DiagnósticosParâmetroSeleção de Dispositivo
Funções ALT
Tecla ALT e após... Realiza essa função...
S.M.A.R.T. Exibe a tela S.M.A.R.T.
Visualização Permite selecionar como serão visualizados os parâmetros ou informações detalhadas sobre um parâmetro ou componente.
Idioma Exibe a tela de seleção de idioma.
Auto / Manual Alterna entre os Modos Automático e Manual.
Remover Permite a remoção da HIM sem causar uma falha se a HIM não for o último dispositivo de controle e não possuir controle Manual do inversor.
Exp Permite que um valor seja introduzido como um exponente.(Não está disponível no PowerFlex 700.)
No. Parâm. Permite a introdução de um número de parâmetro para a visualização/edição.
ALT
Esc
Sel
..
+/–

Visão Geral da HIM B-3
Figura B.1 Estrutura do Menu da HIM
Estrutura do Menu
Displaydo Usuário
Diagnósticos
Energização
Esc Sel
Esc
FalhasInformações de StatusItens do dispositivoVersão do DispositivoVersão da HIM
Informações de FalhaVisualizar Fila de FalhasRemover FalhasRemover Fila de FalhasFazer o reset do dispositivo
Status Inversor 1Status Inversor 2Alarme 1 Inver.Alarme 2 Inver.Fonte Ref VelocInib PartidaFonte Últ. ParadaStatus Ent DigStatus Saída DigTemp InvCont. Sbrcor. Inv.Contag. Sobrecor. Mtr
Dados do Produto da HIM de LCDPlaca de Controle Padrão da HIM de LCDTeclado – Numérico
ContinuarReiniciar
Pressionar
Pressionar
Pressionar
para movimentar-se entre os itens do menu
Pressionar para selecionar como visualizar os parâmetros
para selecionar um item do menu
para voltar 1 nível na estrutura do menu
Armazenamentode Memória
CopyCat da HIMConjuntos do Usuário do Dispositivo Voltar p/ Defaults
Dispositivo -> HIMDispositivo <- HIMDeletar Conjunto da HIM
Introdução
PowerFlex 700Dispositivos DPI Conectados
Seleçãode Dispositivo
Parâmetro
PreferênciasIdentidade do InversorMudar SenhaLinhas Display UsuárioTempo Display UsuárioVídeo Display UsuárioReset Display UsuárioContraste
FGP: ArquivoNome do Arquivo 1 Nome do Arquivo 2 Nome do Arquivo 3
FGP: GrupoNome do Grupo 1Nome do Grupo 2Nome do Grupo 3
FGP: ParâmetroNome do ParâmetroNome do ParâmetroNome do Parâmetro
BásicoAvançado
Visualização selecionada através de
Nív Aces ParâmFGPLista NumeradaAlterada
ALT Sel
ALT Sel
Tela de Valores
PowerFlex 700 Dados do ProdutoPlaca do Controle Principal Placa da Unidade de Potência
Conjunto de Usuários do Inversor:Gravar para Conjunto do UsuárioCarreg. do Conj. UsuárioConj Nome Ativo
Completar as etapas:1. Tensão de Entrada2. Dados motor/rampa3. Testes do Motor4. Limites de Velocidade5. Controle de Velocidade6. Partida/Parada/E/S7. Pronto/Saída
Esc
Selecionar:AbortarBackupReiniciarMenu de energização

B-4 Visão Geral da HIM
Menu de DiagnósticosQuando uma falha disparar o inversor, use esse menu para acessar dados detalhados sobre o inversor.
Menu de ParâmetrosConsulte Visualização e Edição de Parâmetros na página B-5.
Menu de Seleção de DispositivosUse esse menu para acessar parâmetros nos dispositivos periféricos conectados.
Menu de Armazenamento de Memória Os dados do inversor podem ser salvos ou rechamados dos conjuntos do Usuário e da HIM. Conjuntos do usuário são arquivos armazenados na memória permanente não volátil do inversor.Conjuntos da HIM são arquivos armazenados na memória permanente não-volátil da HIM.
Menu de energizaçãoConsulte o Capítulo 2.
Menu de PreferênciasA HIM e o inversor possuem recursos que podem ser personalizados.
Opção Descrição
Falhas Visualizar as informações de falha ou fila de falhas, remover falhas ou fazer o reset do inversor.
Informações de Status Visualizar os parâmetros que exibem informações de status do inversor.
Versão do Dispositivo Visualizar a versão do firmware e série do hardware dos componentes.
Versão da HIM Visualizar a versão do firmware e série do hardware da HIM.
Opção Descrição
Copycat da HIMDispositivo -> HIMDispositivo <- HIM
Salvar dados em um conjunto da HIM, carregar dados a partir de um conjunto da HIM para ativar a memória do inversor ou deletar um conjunto da HIM.
Conjuntos do Usuário do Dispositivo
Salvar dados em um conjunto do Usuário, carregar dados de um conjunto do Usuário para ativar a memória do inversor ou atribuir o nome a um conjunto do Usuário.
Voltar p/ Defaults Reconfigurar o inversor com suas configurações de fábrica.
Opção Descrição
Identidade do Inversor Adicionar texto para identificar o inversor.
Mudar Senha Ativar/desativar ou modificar a senha.
Linhas Display Usuário Selecionar o display, parâmetro, escala e texto para o Display do Usuário. O Display do Usuário é composto de duas linhas de dados definidos pelo usuário que aparecem quando a HIM não está sendo usada para programação.
Tempo Display Usuário Configurar o tempo de espera para o Display do Usuário ou para ativar/desativar o mesmo.
Vídeo Dspy Usuár Selecionar vídeo Reverso ou Normal para as linhas de Display de Usuário e Freqüência.
Reset Dspy Usuár Retorna todas as opções do Display do Usuário aos seus valores de fábrica.

Visão Geral da HIM B-5
O inversor PowerFlex 700 é inicialmente configurado para a Visualização de Parâmetros Básicos. Para visualizar todos os parâmetros, configure o Parâmetro 196 [Niv Aces Param] na opção 1 “Avançado”. O parâmetro 196 não é afetado pela função Voltar para Defaults.
HIM de LCD
Atalho com o Teclado Numérico
Se você estiver usando uma HIM com um teclado numérico, pressione a tecla ALT e a tecla +/– para acessar o parâmetro digitando o seu número.
Visualização e Edição de Parâmetros
Etapa Tecla(s) Exemplos de display1. No Menu Principal, pressione a Seta para Cima ou
Seta para Baixo para movimentar-se até “Parâmetro”.
2. Pressione Enter. O “Arquivo FGP (arquivo-grupo-parâmetro)” aparece na linha superior e os três primeiros arquivos aparecem abaixo dela.
3. Pressione a Seta para Cima ou Seta para Baixo para movimentar-se pelos arquivos.
4. Pressionar Enter para selecionar um arquivo. Os grupos no arquivo são exibidos abaixo dele.
5. Repetir as etapas 3 e 4 para selecionar um grupo e então um parâmetro. Aparecerá a tela de valor de parâmetros.
6. Pressione Enter para editar o parâmetro.
7. Pressione a Seta para Cima ou Seta para Baixo para mudar o valor. Se desejado, pressionar Sel para movimentar-se de dígito a dígito, letra a letra, ou bit a bit. O dígito ou bit que você mudar será destacado.
8. Pressione Enter para salvar o valor. Caso deseje cancelar a mudança, pressione Esc.
9. Pressione a Seta para Cima ou Seta para Baixo para movimentar-se pelos parâmetros no grupo, ou Esc para retornar à lista de grupos.
Sel
Esc
ou
ou
ou
ou
FGP: ParâmetroTensão MáximaFreq. máximaCompensação
FGP: ArquivoMonitoraçãoControle do MotorReferência de velocidade
FGP: Par 55Freq. máxima
60,00 Hz25 <> 400,00
FGP: Par 55Freq. máxima
90,00 Hz25 <> 400,00
FGP: GrupoDados do MotorAtributos de TorqueVolts por Hertz

B-6 Visão Geral da HIM
A maior parte dos valores de parâmetros é introduzida diretamente pelo usuário. Entretanto, pode-se “fazer o link” de certos parâmetros de forma que o valor de um parâmetro passe a ser o valor de um outro. Por exemplo: o valor de uma entrada analógica pode ser vinculado ao [Tempo Acelerac 2]. Em vez de introduzir o tempo de aceleração diretamente (através da HIM), o link permite a mudança do valor pela variação do sinal analógico. Isso pode proporcionar maior flexibilidade para aplicações avançadas.
Cada link possui 2 componentes:
• Parâmetro de fonte – transmissor de informações.
• Parâmetro de destino – receptor de informações.
A grande maioria dos parâmetros pode ser uma fonte de dados para um link, exceto valores de parâmetros que contenham uma constante representando um ENUM (escolha de texto). Esses não são permitidos já que a constante não é um dado real (ela representa um valor). A Tabela B.B relaciona os parâmetros que podem ser de destino. Todos os links devem ser estabelecidos entre tipos semelhantes de dados (valor de parâmetro formatado em um ponto flutuante só pode ser a fonte de dados para um valor de parâmetro de destino que também seja um ponto flutuante).
Como estabelecer um link
Como fazer o link de parâmetros (somente na opção com controle vetorial)
Etapa Tecla(s) Exemplos de display1. Selecione um parâmetro de destino válido
(consulte a Tabela B.B) para ser vinculado (consulte a página B-5). Aparecerá a tela de valor de parâmetros.
2. Pressione Enter para editar o parâmetro. O cursor passará para a linha de valores.
3. Pressione ALT e, em seguida, pressione View (Sel) [Visualizar (Sel)]. Em seguida, pressione a Seta para Cima ou para Baixo para mudar o “Valor atual” para “Definir link”. Pressione Enter.
4. Digite o número do parâmetro fonte e pressione Enter.O parâmetro vinculado (linked) pode agora ser visualizado de duas maneiras diferentes repetindo-se as etapas 1-4 e selecionando-se “Valor atual” ou “Definir link”. Se for feita uma tentativa para editar o valor de um parâmetro vinculado, será exibido “Parameter is Linked!” (Parâmetro está vinculado!), indicando que o valor provém de um parâmetro fonte e não pode ser editado.
5. Para remover um link, repita as etapas 1-5 e mude o número do parâmetro fonte para zero (0).
6. Pressione Esc para retornar à lista de grupos.
Sel
Esc
ou
ALT +
Mín. 0,1 SegMáx.: 3600,0 SegsDflt: 10,0 SegsValor atual
FGP: ParâmetroTempo Aceleraç 1Tempo Aceleraç 2Tempo Desacele 1
Parâmetro: #141Tempo Aceleraç 2Link: 017Valor Ent. Analóg. 1
Definir link
.
.
.

Visão Geral da HIM B-7
Tabela B.B Parâmetros que podem ser vinculados
Número Parâmetro54 Tensão Máxima56 Compensacao57 Modo Fluxo58 Tempo Fluxo59 Filtro boost SV62 Queda tensão RI63 Refer.Corr.Fluxo69 Ref. Part./Acel70 Ref. Operacao71 Tensão de Quebra72 Freq. de Quebra84 Inibição Freq 185 Inibição Freq 286 Inibição Freq 387 Banda Inib freq91 Ref Super Vel A92 Ref Infer Vel A 94 Ref Super Vel B95 Ref Infer Vel B97 Ref Super Man BT98 Ref Infer Man BT100 Veloc. de Jog101 Vel Preset 1102 Vel Preset 2103 Vel Preset 3104 Vel Preset 4105 Vel Preset 5106 Vel Preset 6107 Vel Preset 7119 Ajuste Superior120 Ajuste Inferior121 Escor RPM@ I.nom122 Ganho Comp. Esc.123 Medid RPM Escorr127 Refer do PI129 Tempo Integr PI130 Ganho Prop PI131 Limite Inf PI132 Limite Sup de PI133 Pre-Carga do PI140 Tempo Acelerac 1141 Tempo Acelerac 2142 Tempo Desacele 1143 Tempo Desacele 2146 % Curva -S148 Val Limite Corr149 Ganho Limite Corr151 Frequencia PMW152 Queda RPM @ Inom153 Lim. força regen154 Lim. taxa corr.158 Nivel Fren CC
1111111111113333333333333333333344444444444444444444
N
59 Tempo Fren CC60 Ki Reg Barram64 Kp Reg Barram65 Kd Reg Barram70 Ganho Part Movim75 Temp entre tent80 Nív. ativ-inativ81 Tempo ativo82 Nivelinativo83 Tempo inativo85 Tempo Perda Pot86 Nível perda Pot21 RaizQuad Ent Anl22 Entr Anlg Sup 123 Entr Anlg Inf 124 Perda EntAn 125 Entr Anlg Sup 226 Entr Anlg Inf 227 Perda EntAn243 Saida Analg1 Sup44 Saida Analg1 Inf46 Saida Analg2 Sup47 Saida Analg2 Inf81 Niv Saida Dig 182 TempLigSaidDig 183 TempDslSaidDig 185 Nív Saída Dig 286 TempLigSaidDig 287 TempDslSaidDig 289 Niv Saida Dig 390 TempLigSaidDig 391 TempDslSaidDig 316 Sel Filtro Fdbk19 Freq Filtro Ent.20 K Filtro Entalhe28 Ref Sup Trq A 29 Ref Inf Trq A 30 Div Ref Torque A 32 Ref Sup Torque B33 Ref Inf Torque B34 Mult Ref Trq B35 Pto ajuste trq 36 Limite Trq Pos37 Limite Trq Neg45 Loop veloc. Ki46 Loop veloc. Kp47 Loop veloc. Kf49 LB desejada vel.50 Inércia Total54 Limite veloc rev60 Referên. PI sup.61 Referên. PI inf.úmero Parâmetro44444446666666666
N
62 Feedback PI sup63 Feedback PI inf76-494 Esc.X Valor Ent.77-495 Esc.X Ent. Sup.78-496 Esc.X Ent. Inf. 79-497 Esc.X Saída Sup.80-498 Esc.X Saída Inf.02 BandaDesvioVel03 IntegBandaVel04 TpoDestravFreio05 TempoOscVelZero06 TolerânciaOscil07 TempoAjusFreio08 TaxaVirLimTrq09 Cont Esc Freio10 Perc alarm freio11 % Esc Microposúmero Parâmetro

B-8 Visão Geral da HIM
A HIM pode ser removida ou instalada enquanto o inversor estiver energizado.
Importante: A remoção da HIM é permitida somente no modo Auto. Se a HIM for removida no modo Manual ou se ela for o único dispositivo de controle restante, ocorrerá uma falha.
Remoção/Instalação da HIM
Etapa Tecla(s) Exemplos de displayPara remover a HIM...1. Pressione ALT e, em seguida, pressione Enter
(Remover). Aparecerá a tela de confirmação da remoção da HIM.
2. Pressione Enter para confirmar a remoção da HIM.
3. Remova a HIM do inversor.
Para instalar a HIM...1. Insira no inversor ou cabo de conexão.
ALT + Remova a Interface do Operador:Pressione Enter paraDesconectar Interface do Operador?(Controle da Porta 1)

Apêndice C
Notas do aplicativo
Figura C.1 Circuito do resistor de freio externo
Para informações sobre...Consulte a página... Para informações sobre...
Consulte a página...
Resistor de freio externo C-1 Processo PI para controle padrão C-13
Prova de torque/elevação C-2 Limite de velocidade reversa C-16
Velocidade Mínima C-7 Freqüência de inibição C-17
Tecnologia de controle do motor C-8 Modo Inativo-Ativo C-19
Sobrecarga do motor C-10 Partida na Energização C-21
Sobrevelocidade C-11 Modo de Parada C-22
Percurso de perda de potência C-12 Tolerância de tensão C-24
Resistor de freio externo
Tensão ligada
R (L1)S (L2)T (L3)
Fonte de Alimentação Termostato do Resistor de FD
Tensão desligada
M
M
(Contator de Entrada) M
Entrada CAtrifásica

C-2 Notas do aplicativo
O recurso de prova de torque/elevação do PowerFlex 700 se destina às aplicações que requerem a coordenação entre o controle do motor e o freio mecânico. Antes de liberar o freio mecânico, o inversor verificará a continuidade de fase de saída do motor e verificará o controle apropriado do motor (prova de torque). Além disso, o inversor verificará se o freio mecânico possui controle da carga antes de liberar seu controle (prova de freio). Após o inversor ajustar o freio, o movimento do motor é monitorado para assegurar a capacidade dos freios de manter a carga.
A funcionalidade da aplicação de elevação inclui:
• Prova de torque (inclui a medida do último torque e fluxo).
• Prova de freio (inclui modo para baixar lentamente a carga no caso do freio escorregar/falhar).
• Capacidade de oscilação
• Microposicionamento
• Parada Rápida
• Falha de desvio da velocidade, falha da perda de fase de saída, falha de perda do encoder.
O recurso de prova de torque/elevação se encontra disponível somente no firmware de vetor com as versões 3.xxx e posteriores. É projetado para operar no modo de controle vetor FVC (consulte o parâmetro 53, [Modo Desemp. Trq]) com um encoder. O movimento do motor é monitorado pelo feedback do encoder, evitando que outros modos de feedback sejam usados.
Como colocar a prova de torque/elevação em funcionamento manualmenteÉ possível usar a Energização com Auxílio (consulte a página 2-3) para ajustar o motor. Entretanto, recomenda-se desconectar o motor de guinchos/guindastes durante a rotina. Se isso não for possível, consulte as etapas 1 a 12 nas próximas páginas.
Prova de torque/elevação
!ATENÇÃO: A perda de controle em aplicações de cargas suspensas pode causar lesões pessoais e/ou danos no equipamento. As cargas devem sempre ser controladas pelo inversor ou por um freio mecânico. Os parâmetros 600-611 foram projetados para aplicações de prova de torque/elevação. O engenheiro e/ou usuário final é responsável pela configuração dos parâmetros do inversor, testar toda funcionalidade de elevação e atender os requisitos de segurança de acordo com todos os códigos e padrões que se apliquem.

Notas do aplicativo C-3
Teste inicial de auto-ajuste estático
1. Configure os parâmetros a seguir, como indicado.
2. Pressione a tecla Start (Partida) na HIM. Os parâmetros 062-064 serão atualizados.
Teste de rotação do motor/direção do encoder
3. Configure os parâmetros a seguir, como indicado.
Importante: Se a direção de deslocamento for crítica neste momento, realize jogs de curta duração para determinar a direção de operação (OPERAÇÃO PARA FRENTE ou REVERSA) que deverá ser usada nas próximas etapas.
4. Pressione Start e opere o inversor na direção desejada. Observe o sentido de rotação do motor.
Se a rotação não estiver no sentido desejado:– retire a alimentação do do inversor e inverta dois fios do motor, ou...– configure o bit 5 da [Compensacao], parâmetro 56, em “Inv Fios Mtr”.
5. Observe o parâmetro 415, [Velocidade do Encoder], com o inversor em funcionamento. Se o sinal do encoder não for igual ao da freqüência exibida, retire a alimentação do inversor e inverta os fios A e NÃO A do encoder.
6. Com o inversor em funcionamento, verifique se a rotação do motor e a direção do encoder estão corretas. Configure o [Tipo Fdbk Motor], parâmetro 412, em “1, Verif Quad”. Pare o inversor.
!ATENÇÃO: Para evitar lesões pessoais e/ou danos no equipamento causados pela liberação indesejada do freio, verifique a programação e/ou as conexões do freio da Saída Digital 1. A configuração de default (padrão) do inversor energiza o relé de Saída Digital 1 quando se aplica tensão no inversor. Se o freio estiver conectado a este relé, ele poderá ser solto. Caso seja necessário, desconecte a saída do relé até que a fiação/programação possa ser verificada.
No. Nome Valor Notas380 [Sel Saida Dig 1] “9, Na velocidade” mantém o freio travado durante o teste
041-045 [... Nominal do Motor] de acordo com os dados de identificação
introduza os dados de identificação do motor
053 [Modo Desemp. Trq] “4, Vetor FVC”
080 [Sel Feedback] “3, Encoder”
061 [Auto-ajuste] “1, Ajuste Estático”
No. Nome Valor Notas053 [Modo Desemp. Trq] “0, Vetor Sens”
080 [Sel Feedback] “0, Loop Aberto”
090 [Sel Saida Dig 1] “11, Vel Prprog1”
238 [Config Falha 1] Bit 8, “Perda Fase Ent” = 1Bit 12, “PerdaFaseSaí” = 1
380 [Sel Saida Dig 1] “4, Operar” solta o freio

C-4 Notas do aplicativo
Teste do Auto-Ajuste de Rotação
7. Configure os parâmetros a seguir, como indicado.
8. Dê partida no inversor e opere o motor na direção desejada. Os parâmetros 062, 063, 064 e 121 serão atualizados.
Teste do Auto-Ajuste de Inércia
9. Configure o [Auto-ajust inérc], parâmetro 067, em “1, Ajuste de Inércia”.
10. Pressione Start e opere o motor na direção desejada. Os parâmetros 445, 446 e 450 serão atualizados.
11. Ajuste a [LB desejada vel.], parâmetro 449, na configuração desejada.
12. A configuração está concluída – verifique se operação está correta.
Configuração do InversorA [ConfigProvaTrq], parâmetro 600, deve ser configurada em “Ativado”. Após configurada, um alarme Tipo 2 estará acionado até que as configurações dos três parâmetros a seguir sejam introduzidas:
!ATENÇÃO: As seguintes condições ocorrerão neste teste:• O motor operará por 12 segundos na freqüência de base (60 Hz). Observe
que o deslocamento do equipamento durante este intervalo de 12 segundos pode exceder seus limites. Entranto, a distância do deslocamento pode ser reduzida configurando a [Velocidade Max.], parâmetro 82, em um valor inferior a 45 Hz (ou seja, 22,5 Hz = 12 segundos a 30 Hz).
• O freio será liberado sem torque fornecido pelo inversor por 15 segundos.
Para se proteger conta lesões pessoais e/ou danos no equipamento, este teste não deve ser realizado se quaisquer das condições acima forem consideradas inaceitáveis pelo usuário.
No. Nome Valor Notas053 [Modo Desemp. Trq] “4, Vetor FVC”
080 [Sel Feedback] “3, Encoder”
061 [Auto-ajuste] “2, Ajuste Rotacional”
No. Nome Valor Notas053 [Modo Desemp. Trq] “4, Vetor FVC”
080 [Sel Feedback] “3, Encoder”
412 [Tipo Fdbk Motor] “1, Verif quad”

Notas do aplicativo C-5
Instalação/FiaçãoQuando a [ConfigProvaTrq] estiver configurada em “Ativar”, o relé da Saída Digital 1 é usado para controlar o contator do freio externo. Quando fechado, o contato normalmente aberto (N.O.) visa energizar o contator. Isso fornece tensão ao freio mecânico, fazendo com que o mesmo seja solto. Sempre que houver interrupção de energia ao contator, o freio mecânico será ajustado. A programação de [Sel Saida Dig 1], parâmetro 380, será ignorada quado a [ConfigProvaTrq] estiver configurada em “Ativar”.
Figura C.2 Configuração típica da prova de torque
Programação da aplicação de prova de torque/elevaçãoA aplicação de elevação do PowerFlex 700 é influenciada primordialmente pelos parâmetros 600 a 611 no grupo de Prova de Torque do arquivo Aplicação. A Figura C.3 e os parágrafos seguintes descrevem a programação.
Figura C.3 Diagrama de fluxo da prova de torque
242526272829303132
Operação para frenteOperação reversaRemover falhasOscil./MicroParada RápidaAtivar
1213115 V CA
Contator do freio
Freio ajustadoNormalmente aberto
= Freio ajustado
Ilustração da configuração de 24V. Consulte a página 1-21 para outros exemplos.
Prova de torque iniciada
Freio solto
Oscilação iniciada
Freio ajustado
Teste de escorregamento do freio
Comando de operação
Comando de operação liberado
Inversor em funcionamento
A operação pode iniciar a qualquer momento
Todos os tempos entre as ações do inversor são programáveis e podem ser mudados para bem curtos (por exemplo, o tempo de destravamento do freio pode ser 0,1 segundo)
[TempoOscVelZero]Parâmetro 605
[Tempo Destrav Freio]Parâmetro 604
[Tempo Ajuste Freio]Parâmetro 607
Comandos do operador
Tempo
Ações do inversor

C-6 Notas do aplicativo
Prova de Torque
Quando o inversor recebe um comando de partida para iniciar a operação de elevação, ocorrerão as ações a seguir:
1. Inicialmente, o inversor realiza um teste de diagnósticos do transistor para verificar quanto a curtos fase-fase e fase-terra. O status de falha de qualquer um desses testes resultará em uma falha do inversor e o relé do freio NÃO será energizado (o freio se mantém apertado).
2. O inversor fornecerá fluxo ao motor e também realizará uma verificação do fluxo de corrente pelas três fases do motor. Isso assegura que o torque será aplicado à carga quando o freio mecânico for liberado. Quando a prova de torque estiver acionada, a detecção de perda de fase aberta é realizada, independentemente da configuração do Bit 12 da [Config Falha 1], parâmetro 238.
3. Se o inversor passar em todos os testes, o freio será solto e o inversor assumirá controle da carga após o tempo programado em [TpoDestravFreio], parâmetro 604, que é o tempo típico da liberação mecânica do freio.
Prova de freio
Quando o inversor recebe um comando de parada para finalizar a operação de elevação, ocorrerão as ações a seguir:
1. O freio é controlado para fechar quando a velocidade do motor atingir zero.
2. Após o tempo programado em [TempoAjusFreio], parâmetro 607, o inversor verificará se o freio tem condições de manter o torque. Isso será feito reduzindo o torque na taxa configurada em [TaxaVirLimTrq], parâmetro 608. Observe que o inversor poderá ser inicializado novamente, a qualquer instante, sem aguardar o término de qualquer um dos temporizadores acima.
3. Embora o torque esteja reduzindo, o inversor realizará um teste de escorregamento (deslizamento) do freio. Se o movimento ultrapassar o limite configurado em [Cont Esc Freio], parâmetro 609, um alarme será configurado e o inversor iniciará um procedimento de escorregamento do freio. O inversor permitirá que o motor se desloque na distância programada em [Perc alarm freio], parâmetro 610. Um outro teste de escorregamento será realizado e repetirá continuamente até que A) a carga deixe de escorregar ou B) a carga alcance o solo. Este recurso mantém o controle da carga, retornando-a ao solo de uma maneira controlada no evento de uma falha do freio mecânico.

Notas do aplicativo C-7
Monitoração da velocidade / Limite da banda de velocidade
Esta rotina visa causar uma falha no inversor se a diferença entre e referência de velocidade e o feedback do encoder for maior do que o valor configurado em [BandaDesvioVel], parâmetro 602, e o inversor NÃO estiver fazendo nenhum progresso no sentido da referência. O parâmetro 603, [IntegBandaVel], configura o tempo que a diferença de velocidade pode ser superior à banda de desvio antes de causar uma falha e apertar o freio.
Oscilação
A oscilação é definida como a condição quando o inversor estiver mantendo a carga em zero Hertz e suster o freio mecânico. Essa condição inicia quando a freqüência cair abaixo da velocidade configurada em [TolerânciaOscil], parâmetro 606 e permanecerá ativa pelo período de tempo configurado no [TempoOscVelZero], parâmetro 605. Se a entrada digital (parâmetros 361-366) for configurada em “MicroPos” e estiver fechada, a condição de Oscilação permanecerá ativa e ignorará o temporizador. Este sinal também se encontra disponível através de um dispositivo de comunicação. Consulte o parâmetro 601, [Configuração da ProvaTorq].
Microposicionamento
O microposicionamento refere-se a uma nova graduação da freqüência comandada por uma porcentagem introduzida na [% Esc Micropos], parâmetro 611. Isso permite uma operação mais lenta da elevação, fornecendo ao operador uma melhor resolução no posicionamento da carga. O microposicionamento é ativado apenas quando o inversor estiver operando em uma velocidade próxima ou igual a zero. Isso pode ser iniciado por uma entrada digital configurada como microposicionamento ou por um dispositivo de comunicação ([Configuração da ProvaTorq]) que é a mesma entrada digital que envia sinais à condição de oscilação.
Parada Rápida
A Parada Rápida tem por objetivo parar a carga o mais rápido possível e então ajustar o freio mecânico. Ela pode ser iniciada de uma entrada digital ou por um dispositivo de comunicação pela [Configuração da ProvaTorq]. Se diferencia da parada normal pelo fato de forçar o tempo de desaceleração para que seja de 0,1 segundo. Quando a função de Prova de Torque for ativada, o tempo de oscilação é ignorado no final da rampa. Este recurso pode ser usado sem ativar a função Prova de Torque.
Consulte Limite de velocidade reversa na página C-16.
Velocidade Mínima

C-8 Notas do aplicativo
A famíla PowerFlex conta com diversas tecnologias de controle do motor :
• Produtores de torque• Controladores de torque• Reguladores de velocidade
Produtores de torqueVolts/Hertz
Esta tecnologia segue um padrão específico de saída de tensão e freqüência para o motor, independentemente do motor que está sendo utilizado. A forma da curva V/Hz pode ser controlada por uma quantidade limitada, mas uma vez determinada, a saída do inversor é fixada nestes valores. Dados os valores fixados, cada motor reagirá baseando-se nas suas próprias características de velocidade/torque.
Essa tecnologia é boa para a operação básica de ventilador/bomba centrífuga e para a maioria das aplicações com multimotores. Em geral, a produção de torque é boa.
Vetor sensorless
Essa tecnologia combina o conceito básico de Volts/Hertz com parâmetros conhecidos do motor como carga plena, potência e tensão nominais, resistência do estator e corrente de produção de fluxo. O conhecimento do motor específico conectado ao inversor permite que este último ajuste o padrão de saída ao motor e às condições de carga. Ao identificar os parâmetros do motor, o inversor pode maximizar o torque produzido no motor e estender a faixa de velocidade na qual este torque pode ser produzido.
Esta tecnologia é excelente para aplicações que exigem uma maior faixa de velocidade e que necessitam o máximo torque possível para arranque, aceleração ou sobrecarga. Centrífugas, extrusores, transportadores e outros são boas opções.
Controladores de torqueVetor
Esta tecnologia difere das duas acima já que efetivamente controla ou regula o torque. Em vez de permitir que o motor e carga determinem realmente a quantidade de torque produzida, a tecnologia de Vetor permite que o inversor regule o torque em um valor definido. O controle verdadeiro do torque é alcançado identificando e controlando, independentemente, as correntes de fluxo e torque no motor. Reguladores de corrente de largura de banda elevada mantêm-se ativos com ou sem o feedback do encoder para produzir resultados
Tecnologia de controle do motor

Notas do aplicativo C-9
extraordinários.
Esta tecnologia é excelente para aquelas aplicações em que o controle de torque, em vez de apenas sua produção, se constitui na chave para o êxito do processo. Entre elas, pode-se citar o manuseio de bobinas de papel, extrusoras exigentes e aplicações de elevação, como guindastes ou manuseio de materiais.
O controle vetorial pode operar numa dentre essas duas configurações:
1. Sem encoder
Para que não seja confundido com Vetor Sensorless acima, Vetor sem Encoder baseado na tecnologia patenteada Field Oriented Control (Controle Orientado de Campo) da Allen Bradley significa que não é necessário um dispositivo de feedback. O controle de torque pode ser obtido por uma grande faixa de velocidade sem feedback.
2. Loop fechado (com encoder)
O controle vetorial com feedback de encoder emprega a Force Technology™ da Allen-Bradley. Esta tecnologia de liderança no setor permite que inversor controle o torque por toda faixa de velocidade, incluindo a velocidade zero. Controle vetorial com loop fechado é a resposta para aquelas aplicações que requerem regulação de torque suave a velocidades muito baixas ou torque pleno na velocidade zero.
Reguladores de velocidade
Qualquer inversor PowerFlex, independentemente de sua tecnologia de controle do motor (Volts/Hz, Vetor sensorless ou vetorial) pode ser configurado para regular a velocidade. Para compreender a operação do inversor, a regulação da velocidade e a regulação do torque devem ser separadas.
O PowerFlex 70 e o PowerFlex 700 com controle padrão podem ser programados para regular a velocidade usando o recurso de compensação de escorregamento. A compensação de escorregamento reage às mudanças de carga ajustando a freqüência de saída do inversor para manter a velocidade do motor. A produção de torque opera independentemente. Este recurso produz a regulação de velocidade de aproximadamente 0,5% da velocidade básica em uma faixa de velocidade especificada (40:1 para V/Hz e 80:1 para vetor sensorless). Estes dois inversores não têm a capacidade de ampliar a faixa de velocidade ou de estreitar a regulação de velocidade abaixo de 0,5%, pois não possuem conexões para um dispositivo de feedback.
O PowerFlex 700 com a opção de controle vetorial pode oferecer melhor regulação de velocidade adicionando o feedback de velocidade. A utilização de um dispositivo de feedback de velocidade (encoder) restringe a regulação de velocidade a 0,001% da velocidade básica e estende a faixa de velocidade para a velocidade zero.

C-10 Notas do aplicativo
Para aplicações de motor único, o inversor pode ser programado para proteger o motor contra condições de sobrecarga. Uma função I2T de sobrecarga térmica eletrônica emula um relé de sobrecarga térmica. Esta operação é baseada em três parâmetros: [Amps Mtr ID.], [Fator sobrec mtr] e [Freq Sobrecarga Motor] (parâmetros 042, 048 e 047 respectivamente).
A [Corrente Nominal Plena do Motor] é multiplicada pelo [Fator sobrec mtr] para permitir que o usuário defina o nível contínuo de corrente admitido pela sobrecarga térmica do motor. A [Freq Sobrecarga Motor] é usada para permitir ao usuário ajustar a freqüência abaixo da qual a sobrecarga do motor é reduzida.
O motor pode operar continuamente até da 102% carga plena. Se o inversor acabou de ser ativado, ele operará a 150% da carga plena por 180 segundos. Se o motor estava operando a 100% por mais de 30 minutos, o inversor continuará operando a 150% da carga plena por 60 segundos. Esses valores pressupõem que o inversor esteja operando acima da [Freq Sobrecarga do motor] e que o [Fator sobrec mtr] está configurado em 1,00,
Uma operação abaixo de 100% da corrente faz com que o cálculo de temperatura leve em consideração o resfriamento do motor.
[Freq Sobrecarga Motor] define a freqüência em que a redução da capacidade de sobrecarga do motor deve iniciar. A capacidade de sobrecarga do motor é reduzida durante a operação abaixo da [Freq Sobrecarga Motor]. Para todos os ajustes da [Freq Sobrecarga Motor] diferentes de zero, a capacidade de sobrecarga é reduzida para 70% em uma freqüência de saída de zero.
Sobrecarga do motor
Curva de sobrecarga do motor
100 125 150 175 200 225 250Corrente de carga total (%)
Tem
po d
e di
spar
o (s
egun
dos)
FrioQuente
10
100
1000
10000
100000
Freqüência de sobrecarga alternada
0 10 20 30 40 50 60 70 80 90 100
% da velocidade básica
Reg
ime
cont
ínuo
OL Hz = 10OL Hz = 25OL Hz = 50
0
20
40
60
80
100
120

Notas do aplicativo C-11
A [Corrente Nominal Plena do Motor] é multiplicada pelo [Fator sobrec mtr] para selecionar a corrente nominal para a sobrecarga térmica do motor. Isso pode ser usado para aumentar ou diminuir o nível de corrente que causará disparo devido à sobrecarga térmica do motor. O fator de sobrecarga eficaz é uma combinação de [Freq Sobrecarga Motor] e [Fator sobrec mtr].
O limite de sobrevelocidade é um valor programável pelo usuário que permite a operação na velocidade máxima, mas também fornece uma “banda de sobrevelocidade” que permitirá a um regulador de velocidade, tal como feedback do encoder ou compensação de escorregamento, a aumentar a freqüência de saída acima da velocidade máxima a fim de manter a velocidade máxima do motor.
A figura abaixo ilustra um perfil V/Hz Personalizado típico. A velocidade mínima é introduzida em Hertz e determina o limite inferior de referência de velocidade durante a operação normal. A velocidade máxima é introduzida em Hertz e determina o limite superior de referência de velocidade. Os dois parâmetros de “velocidade” limitam apenas a referência de velocidade e não a freqüência de saída.
A freqüência de saída efetiva na referência de velocidade máxima é a soma dos componentes de referência de velocidade e “adicionador de velocidade” de funções como a compensação de escorregamento.
O limite de sobrevelocidade é introduzido em Hertz e adicionado à velocidade máxima e, a soma dos dois (limite de velocidade), limita a freqüência de saída. Esta soma (limite de velocidade) é comparada à freqüência máxima e então um alarme é acionado evitando a operação se o limite de velocidade ultrapassar a freqüência máxima.
Fator de sobrecarga alternada
0 10 20 30 40 50 60 70 80 90 100% da velocidade básica
Reg
ime
cont
ínuo
OL % = 1,20OL % = 1,00OL % = 0,80
0
20
40
60
80
100
120
140
Sobrevelocidade

C-12 Notas do aplicativo
Quando a tensão de entrada CA for perdida, a energia será suprida ao motor através dos capacitores de barramento CC. Como a energia dos capacitores não está sendo reposta (através da linha CC), a tensão de barramento CC cairá rapidamente. O inversor deve detectar esta queda e reagir segundo a maneira que foi programado. Dois parâmetros exibem a tensão de barramento CC:
• [Tensão Barram CC] – exibe o valor instantâneo
• [Mem. Barram CC] – exibe a média de tensão para uma operação de 6 minutos.
Todas as reações do inversor relativas à perda de potência se baseiam na [Mem. Barram CC]. Isso faz uma média das condições baixas e elevadas de linha e ajusta o inversor para reagir à média e não a valores pressupostos. Por exemplo, uma instalação de 480V teria uma linha de 480V CA e produziria um barramento CC nominal de 648V CC. Se o inversor reagisse a uma tensão fixada para detectar a perda de linha (por exemplo 533V CC), a operação normal ocorreria para as instalações nominais de linha. Mas, se fosse usada uma tensão nominal inferior da linha de 440V CA, a tensão nominal no barramento CC seria somente 594V CC. Se o inversor tivesse de reagir ao nível fixo de 533V (apenas –10%) para a detecção de perda de linha, qualquer anomalia poderia conduzir a uma detecção de perda de linha falsa. Desta forma, a perda de linha sempre usa a média de 6 minutos para a tensão no barramento CC e sua detecção se baseia em uma porcentagem fixa daquela memória. No mesmo exemplo, a média seria 594V CC em vez de 650V CC e a porcentagem fixa, 27% para “Coast até parada” e 18% para todos os demais, permitiria uma operação idêntica independentemente da tensão de linha.
Freqüência
Tens
ão d
e Sa
ída
Nota 1: O limite inferior nesta faixa pode ser 0 dependendo do valor do adicionador de velocidade
Limite de Sobrevelocidade
Ajuste de Freqüência devido ao Modo de Controle de Velocidade
Tensão Máxima
Tensão Nominal
Reforço Operação
(Boost)
Tensão de Interrupção
Reforço dePartida (Boost)
Faixa de Freqüência de Saída Permitida - Operação Normal 1
Faixa de Referência de Velocidade Permitida
Faixa de Freqüência de Saída Permitida - Regulação de Barramento ou Limite de Corrente
FreqüênciaMáxima
Freqüência Nominal0 Freq. de Interrupção
Velocidade Máxima
Velocidade mínima
Limite de Frequência de Saída
Percurso de perda de potência

Notas do aplicativo C-13
O PowerFlex 70 usa somente essas porcentagens fixas. O PowerFlex 700 pode, seletivamente, usar as mesmas porcentagens ou o usuário poderá configurar um ponto de disparo para detectar a perda de linha. O nível de disparo ajustável é configurado usando-se o [Nível Perda de Potência] (consulte [Nível Perda de Potência] na página 3-38).
Figura C.4 Modo de Perda de Potência = Coast
Figura C.5 Modo de Perda de Potência = Desacel
A função PI interna do PowerFlex 700 oferece controle de processo de loop fechado com ação de controle proporcional e integral. A função é projetada para uso em aplicativos que exigem controle simples de um processo sem dispositivos de controle externos. A função PI permite que o microprocessador do inversor siga um loop simples de controle de processo.
A função PI lê uma entrada da variável do processo para o inversor e a compara ao ponto de ajuste desejado armazenado no inversor. O algoritmo ajustará então a saída do regulador de PI, mudando a freqüência de saída do inversor para tentar tornar a variável de processo igual ao ponto de ajuste.
Nominal
73%
Tensao nobarramento
Velocidadedo motor
Ativação saída
Perda de potência
Nominal
82%
Tensao nobarramento
Velocidadedo motor
Ativação saída
Perda de potência
Processo PI para controle padrão

C-14 Notas do aplicativo
Ele pode operar como um modo de ajuste reunindo a saída de loop PI com uma referência mestre de velocidade.
Ou, pode operar como um modo de controle fornecendo toda a referência de velocidade. Este método é chamado de “modo exclusivo”.
Ativar PI
A saída do loop PI pode ser ligada (ativada) ou desligada (desativada). Este controle permite que o usuário estabeleça quando o loop PI está fornecendo parte ou toda a velocidade comandada. A lógica de ativação do loop PI está indicada abaixo.
O inversor deve estar operando para que o loop PI seja ativado. O loop será desativado quando o inversor estiver rampeando para uma parada (exceto se o “Modo de Parada” estiver configurado em [Configuração PI]), em jog ou a proteção de perda do sinal para a(s) entrada(s) analógica(s) estiver detectando uma perda de sinal.
Se uma entrada digital for configurada em “Ativar PI”, dois eventos serão necessários para ativar o loop: a entrada digital deve estar fechada E o bit 0 do parâmetro Controle de PI dever ser =1.
+
Com. Veloc.
ControladorProcesso PI
Rampa lineare Curva-S
+
+
+
PI Ativado Controle de Velocidade
Ref. veloc.
Ref PI
Fbk PI
AdicionadorEscorr. Loop
Aberto
Comp.Escor.
ProcessoPI
Com. Veloc.
ControladorProcesso PI
Rampa lineare Curva-S
+
+
PI Ativado Controle de Velocidade
Ref. veloc.
Ref PI
Fbk PI
AdicionadorEscorr. Loop
Aberto
Comp.Escor.
ProcessoPI
Inversor emfuncionamento
Inversorrampeandoaté parada
Inversorjogging
Bit 0 de[Controle PI] = 1
(ativado)
[Config PI]
Perda de sinal
A entradadigital configurada
está fechada
Uma entrada digitalestá configurada
em PI ativar
O status "ativado"da entrada
digital está refletidono [Status PI]
Bit 0 = 1
O loop de PIestá ativado
Bit 0 Bit 6

Notas do aplicativo C-15
Se nenhuma entrada estiver configurada em “Ativar PI”, então somente a condição Bit 0 = 1 deverá ser atendida. Se o bit estiver configurado permanentemente em “1”, o loop será ativado assim que o inversor entrar em “operação”.
PI Ativado
Com. Veloc.
Saída PIValor pré-carga PI
Valor pré-carga PI = 0 Valor pré-carga PI > 0
Pré-carga à velocidade de comando
PI Ativado
Com. Veloc.
Saída PIPartida no Com. Veloc.
-100,0 -75,0 -50,0 -25,0 0,0 25,0 50,0 75,0 100,0
Feedback normalizado
Rai
z qu
adra
da n
orm
aliz
ada
(Fee
dbac
k)
-100,0
-75,0
-50,0
-25,0
0,0
25,0
50,0
75,0
100,0
+
++
+
z–1
*
*
Fbk PI
Erro de PI Saída de PI
Ref PI
Com. PI
Rampa linear–
+
–
Rampa lineare Curva-S Rampa Veloc.
0
+
+
Zfixo
Limite Ent.
Erro EXC. PIabs
Config_PI.Exclusiva
Limite correnteou tensão
Com. Veloc.
*(Sel Ref PI)
*(Sel Fbk PI)
Kp PI
Ki PI
Limite Neg PI
Limite Pos PI
.ManterStatus_PI
Ref. veloc.
&
.ComRampConf_PI
Status_PI.Ativado
Invers.Config_PI
.Raiz QuadConfig_PI
0
Config_PI.Ajuste Torq
.RegVelConfig_PI
Status_PI.Ativado Config_PI
.Zero fix.
Erro Exc. PI
Com. Pré-cargaConfig._PI
Valor pré-carga
Status_PI.Ativado
Com. Veloc.
+32K
0
–32K
0
+32K
–32K
Com. Veloc.
para A
A
Ref Torque A
Ref Torque B
0
+800
0
–800
0
+800
–800
+
+
+
+
Com. Torq
Opção com controle vetorial

C-16 Notas do aplicativo
Figura C.6 [Limite Velocidade Rev], parâmetro 454, configurado em zero
Figura C.7 [Limite Velocidade Rev], parâmetro 454, configurado em um valor diferente de zero
Limite de velocidade reversa
Velocidadepara frente
Velocidadereversa
[VelocidadeMáxima]
[VelocidadeMáxima]
VelocidadeMínima = 0
10V
–10V
Velocidadepara frente
Velocidadereversa
[VelocidadeMáxima]
[VelocidadeMáxima] Velocidade
Mínima ≠ 0
VelocidadeMínima ≠ 0
10V
–10V
Velocidadepara frente
Limite develocidade
reversa
[Velocidade Máxima]
10V
–10V
Velocidadereversa

Notas do aplicativo C-17
Figura C.8 Freqüência de inibição
Algumas máquinas possuem uma freqüência de operação ressonante que deve ser evitada para minimizar o risco de danos. Para garantir que o motor não possa operar continuamente em um ou mais pontos, são utilizadas freqüências de inibição. Os parâmetros 084-086 ([Inibição Freq 1-3]) estão disponíveis para configurar as freqüências que devem ser evitadas.
O valor programado nos parâmetros de freqüência de inibição estabelece o ponto central para uma “banda de inibição” de freqüências completa. A largura da banda (faixa de freqüência em torno do ponto central) é determinada pelo parâmetro 87, [Banda Inib freq]. A faixa é dividida, metade acima e metade abaixo do parâmetro de inibição de freqüência.
Se a freqüência comandada do inversor for superior ou igual à freqüência de inibição (centro) e menor ou igual ao valor superior da banda (inibição mais ½ banda), o inversor configurará a freqüência de saída no valor superior da banda. Consulte (A) na Figura C.8.
Se a freqüência comandada do inversor for menor do que a freqüência de inibição (centro) e maior ou igual ao valor inferior da banda (inibição menos ½ banda), o inversor configurará a freqüência de saída no valor inferior da banda. Consulte (B) na Figura C.8.
A aceleração e a desaceleração não são afetadas pelas freqüências de inibição. Aceleração/desaceleração normais prosseguirão pela banda quando a freqüência comandada for superior à freqüência de inibição. Consulte (A) e (B) na Figura C.8. Esta função afeta somente a operação contínua dentro da banda.
Freqüência de inibição
Freqüência
Tempo
(A) (A)
(B) (B)
Freqüência de inibição
Comandode freqüência
Freqüência desaída do inversor
Inibição + ½ banda
Inibição – ½ banda
35 Hz
30 Hz
25 Hz

C-18 Notas do aplicativo
Exemplos de freqüência de inibiçãoA freqüência de inibição terá histerese para que a saída não alterne entre os valores superior e inferior. Três bandas distintas podem ser programadas. Se nenhuma das bandas de inibição se tocar ou sobrepor, cada banda terá seu próprio limite superior/inferior.
Se as bandas se sobrepuserem ou se tocarem, a freqüência central será recalculada com base nos valores de banda mais elevado e mais baixo.
Se a(s) banda(s) de inibição se estender(em) além dos limites de freqüência máxima, o valor de banda mais elevado será fixado no limite máximo de freqüência. A freqüência central é recalculada com base nos valores mais elevado e mais baixo da banda.
Se a banda estiver fora dos limites, a banda de inibição estará inativa.
0 Hz
Freqüência deinibição 2
Freqüência deinibição 1
Frequência Máx.
Banda deinibição 1
Banda deinibição 2
0 Hz
Freqüência de inibição 2Freqüência de inibição 1
400 Hz
Banda deinibiçãoajustada c/ freqüência de inibição recalculada
0 Hz
Frequência Máx.de inibição
400 Hz
Banda deinibição ajustadac/ freqüência deinibição recalculada
0 Hz
Frequência Máx.de 60 Hz
Freqüência de inibição 1
400 Hz
Banda deinibição inativa

Notas do aplicativo C-19
Esta função pára (desativa) e inicia (ativa) o inversor baseado em níveis de entrada analógica configuráveis separadamente, em vez dos sinais discretos de partida e parada. Se ativado no modo “Direto”, o inversor iniciará (ativará) quando um sinal analógico for maior ou igual àquele especificado pelo usuário no [Nív. ativ-inativ] e parará o inversor quando um sinal analógico for menor ou igual ao especificado em [Nivelinativo]. Quando Inativo-Ativo for ativado no modo “Inverter”(1), o inversor iniciará (ativará) quando um sinal analógico for menor ou igual àquele especificado pelo usuário no [Nív. ativ-inativ] e parará o inversor quando um sinal analógico for maior ou igual ao especificado pelo usuário em [Nivelinativo].
Definições• Ativo – um comando de partida gerado quando o valor de entrada analógica
permanecer acima do [Nivel Ativo] (ou abaixo quando o modo Inverter estiver ativo) por um período maior do que [Tempo ativo].
• Inativo – um comando de parada gerado quando o valor de entrada analógica permanecer abaixo do [Nivel Inativo] (ou acima quando o modo Inverter estiver ativo) por um período maior do que [Tempo inativo].
• Velocidade de referência – o comando de velocidade ativo para o inversor, conforme selecionado pela lógica do inversor e [Sel Ref Veloc X].
• Comando de partida – um comando gerado pressionando-se o botão Start (partida) na HIM, fechando uma entrada digital programada para a Partida, Operação, Operação para Frente ou Operação Reversa.
Consulte Figura C.9.
Modo Inativo-Ativo
(1) O modo Inverter se encontra disponível apenas em firmware de vetor da versão 3.xxx e posteriores.

C-20 Notas do aplicativo
Figura C.9 Modo Inativo-Ativo
O modo Inativo-Ativo está funcionando?
Estas condições foram atendidas?
A entrada necessárioa está fechada?
(Parar, Ativar, Operar)
Ocorreu uma falha do inversor?
Que entrada necessáriafoi selecionada?
Atende todas as condições!
Feche a entrada
Faça o reset da falha
Sim
Sim
Parar ou AtivarOperação, Operação para
Frente ou Operação Reversa
Sim
Sim
Inversor em funcionamento?
Não
DiretoInversão
NãoNão
Não
Não
Não
Não
Emitir um comando de partida (HIM, Rede ou BT)
Abrir e fechar a entrada
Consulte a fábrica
NãoConsulte a fábrica
Qual foi o modo selecionado? "Inversão" ou "Direto"
1. [Ref Inativo-Ativo] deve ser configurado na entrada analóliga que controle as funções de "Partida/Parada".
2. [Modo Inativo-Ativo] deve ser = "1, Direto (Ativar) ou "2, Inversão (Ativar)".3. [Nível Inativo] deve ser menor do que [Nível Ativo] no modo Direto (ou maior
do que [Nível Ativo] no modo "Inversão").4. [Sel Ref Veloc x] deve ser configurada em uma fonte de referência de
velocidade que controlará o inversor. Se a [Ref Inativo-Ativo] = [Sel Ref Veloc x], o mesmo sinal analógico controlará a partida/parada e referência de velocidade.
5. Pelo menos uma das seguintes funções deve ser programada para a [Sel Ent Digital x]: "Não parar", "Ativar", "Iniciar", "Operação", "Operação para frente", "Operação Reversa".
O sinal analógico é maior ou igual ao [Nível Ativo] e por um período
igual ou superior ao [Tempo Ativo]?
Sim Sim
O sinal analógico é igual ou menor do que o [Nível Ativo]? E por
um período igual ou superior ao [Tempo Ativo]?
Aumente o sinal de entrada analógica e aguarde por um período superior ou igual ao
[Tempo Ativo].
Reduza o sinal de entrada analógica e aguarde por um período superior ou igual ao
[Tempo Ativo].
Foi emitido um comando de parada? ou
Houve um ciclo de energia?

Notas do aplicativo C-21
Opção com controle padrão
Quando a partida na energização com controle de 2 fios for configurada, o inversor inicializará se as condições permissíveis de partida forem atendidas dentre 10 segundos da aplicação de tensão ao inversor. Será anunciado um alarme da aplicação de força até que o inversor comece de fato a operar, indicando que a tentativa de partida na energização está em andamento. Se o inversor não der partida dentro de um intervalo de 10 segundos, a tentativa de partida na energização será suspensa.
Opção com controle vetorial
Pode-se programar um retardo de energização de até 30 segundos pelo [Retardo Energiz], parâmetro 167. Depois que este tempo se esgotar, o inversor dará a partida se as condições permissíveis de partida forem atendidas. Não é possível reiniciar antes deste período.
Partida na Energização
Esgotou o período de[Retardo de Energização]?
Opção com controle vetorial
Partida na Energização
Sim
Energização suspensa!Modo normal
Não
Não
Não
O limite de 10 segundosesgotou?
Opção com controle padrão
Início da energização Início da energização
A entrada de Operação, Operação paraFrente ou Operação Reversa do bloco
de terminais está fechada?
Sim
Energização suspensa!Modo normal
Sim
Sim
Não
Não
Não
Foram atendidas todas as condições permissíveis de Entrada ?
1. Nenhuma condição de falha presente.2. Nenhuma condição de alarme tipo 2
presente.3. A entrada de ativação programada do
bloco de terminais se encontra fechada.4. É recebida uma entrada de parada
(de todas as fontes).
Sim
Sim
Foram atendidas todas as condições permissíveis de Entrada ?
1. Nenhuma condição de falha presente.2. Nenhuma condição de alarme tipo 2
presente.3. A entrada de ativação programada do
bloco de terminais se encontra fechada.4. É recebida uma entrada de parada
(de todas as fontes).
A entrada de Operação, Operação paraFrente ou Operação Reversa do bloco
de terminais está fechada?

C-22 Notas do aplicativo
Modo de Parada
Modo DescriçãoCoast até parada
Este método libera o motor e permite que a carga pare por atrito.1. Na parada, a saída do inversor passa imediatamente para zero (desligado). 2. Não há mais suprimento de energia para o motor. O inversor liberou o controle. 3. O motor continuará em movimento por um período que depende da mecânica do sistema (inércia,
atrito, etc.).Frenagem até parada
Este método utiliza injeção CC do motor para parar e/ou manter a carga.1. Na parada, a saída trifásica do inversor passa imediatamente para zero (desligado). 2. O inversor produz tensão CC na última fase usada no nível programado no Parâmetro 158, [Nivel
Fren CC]. Esta tensão causa um torque de frenagem de “parada”. Se a tensão for aplicada por um período maior que o tempo de parada possível real, o tempo restante será usado para tentar manter o motor na velocidade zero.
3. A tensão CC para o motor continua pelo tempo programado no Par. 159, [Tempo Fren CC]. A frenagem cessa depois que este tempo se esgotar.
4. Depois que a frenagem CC parar, não há mais suprimento de energia para o motor. O motor poderá ou não estar parado. O inversor liberou o controle.
5. O motor, se estiver girando, continuará em movimento na velocidade atual por um período que depende da mecânica do sistema (inércia, atrito, etc.).
O tempo de coast depende da cargaComandode parada
Tempo
Tensão de Saída
Corrente de Saída
Velocidade do motor
Comandode parada Tempo de
Espera CC
(A)(C)(B)Tempo
Tensão de Saída
Corrente de Saída
Velocidade do motor
Nível deEspera CC

Notas do aplicativo C-23
Rampa até parada
Este método usa a redução de saída do inversor para suspender a carga.1. Na parada, a saída do inversor diminuirá de acordo com o padrão programado de seu valor atual
até zero. O padrão poderá ser linear ou ao quadrado. A saída diminuirá até zero na razão determinada pela [Freq Máxima] programada e pelo [Tempo Desacele x] ativo programado.
2. A redução na saída poder ser limitada por outros fatores do inversor, como a regulação de corrente ou barramento.
3. Quando a saída atingir zero, ela será desligada. 4. O motor, se estiver girando, continuará em movimento na velocidade atual por um período que
depende da mecânica do sistema (inércia, atrito, etc.).Rampa para manter
Este método combina os dois métodos descritos acima. Ele usa a redução de saída do inversor para parar a carga e injeção CC para manter a carga na velocidade zero uma vez que esteja parada.1. Na parada, a saída do inversor diminuirá de acordo com o padrão programado de seu valor atual
até zero. O padrão poderá ser linear ou ao quadrado. A saída diminuirá até zero na razão determinada pela [Freq Máxima] programada e pelo [Tempo Desacele x] ativo programado.
2. A redução na saída poder ser limitada por outros fatores do inversor, como a regulação de corrente ou barramento.
3. Quando a saída atinge zero, a saída trifásica do inversor vai para zero (desligado) e o inversor produz tensão CC na última fase usada no nível programado no Parâmetro 158, [Nivel Fren CC]. Esta tensão faz com que o torque de frenagem se “mantenha”.
4. A tensão CC para o motor continua até que um comando de partida seja emitido novamente ou se o inversor for desativado.
5. Caso seja emitido um novo comando de partida, a frenagem CC pára e o inversor retorna à operação CA normal. Se for removido um comando de Ativar, o inversor entra no estado “não pronto” até que a ativação seja restaurada.
Modo Descrição
Tempo deEspera CC
Nível deEspera
CC
Comandode parada
Tempo
Tensão de Saída
Corrente de Saída
Velocidade do motor
Tensão de Saída
Corrente de Saída
Velocidade decomando zero
Nível deEspera CC
Tempo
Tensão de Saída
Tensão de Saída
Corrente de Saída
Corrente de SaídaVelocidade do motor
Tensão de Saída
Corrente de Saída
Velocidade do motor
Reemissão de umcomando de partida
Comandode parada
Velocidade decomando zero

C-24 Notas do aplicativo
Exemplo:
Calcular a potência máxima de um motor de 5 HP, 460V, conectado a um inversor com classificação de 480V suprido com uma entrada de tensão de linha efetiva de 342V.
• Tensão de linha efetiva / Tensão nominal do motor = 74,3%
• 74,3% × 5 HP = 3,7 HP
• 74,3% × 60 Hz = 44,6 Hz
A uma tensão de linha efetiva de 342V, a potência máxima que o motor de 5 HP, 460V pode produzir é 3,7 HP a 44,6 Hz.
Tolerância de tensão
Classificação do Inversor
Tensão nominal da linha
Tensão nominaldo motor
Faixa de potência plena do inversor
Faixa operacional do inversor
200-240 200 200* 200-264 180-264
208 208 208-264
240 230 230-264
380-400 380 380* 380-528 342-528
400 400 400-528
480 460 460-528
500-600(Somente para os Gabinetes 0-4)
600 575* 575-660 432-660
500-690(Somente para os Gabinetes 5-6)
600 575* 575-660 475-759
690 690 690-759 475-759
Faixa de potência plena do inversor =
Tensão nominal do motor para a tensão nominal do inversor +10%.A potência nominal está disponível até toda a faixa de potência plena do inversor.
Faixa operacional do inversor = A mais baixa (*) tensão nominal do motor – 10% até a tensão nominal do inversor +10%.A saída do inversor é reduzida linearmente quando a tensão de linha efetiva for menor do que a tensão nominal do motor.
Potê
ncia
(HP)
no
mot
or
(saí
da d
o in
vers
or)
Tensão de linha efetiva (entrada do inversor)
Faixa de potência plena
Faixa operacional do inversor
Tensão nominal do motor –10%Tensão nominal do motor
Faixa de potência reduzida
Tensão nominal do inversorTensão nominal do inversor +10%
5 HP
3,7 HP
Potê
ncia
(HP)
no
mot
or
(saí
da d
o in
vers
or)
Tensão de linha efetiva (entrada do inversor)
342V460V
480V528V

Notas do aplicativo C-25
Notas:

C-26 Notas do aplicativo
Notas:

Índice remissivo
Symbols% Curva-S, 3-31% Esc Micropos, 3-60
AAbertura da Tampa, 1-1Absol Saida Anlg, 3-54Ajuste Inferior, 3-26Ajuste Superior, 3-26Alarme 1 Falha, 3-45Alarme 1 Inver., 3-41Alarme 2 Falha, 3-45Alarme 2 Inver., 3-41, 3-42Alarme Configurável pelo Usuário, 4-1Alarmes
Adv Terra, 4-11Ativação, 4-12Conf Ent Dig, 4-10Conf Freq Máx, 4-11Conf ProvaTorq, 4-12Conf Ref Man BT, 4-12Conf Ref Veloc, 4-11Conf Tipo Motor, 4-11Config Inativo, 4-11Conflito Bipolar, 4-10Conflito Hz Plac, 4-11Conflito PTC, 4-11Escorregamento de freio, 4-10Inibição de Desacel, 4-10Lim Tens Ixo, 4-11Limite Tensão RI, 4-11Nív Sobrec Inv, 4-10Partida na Energização, 4-11Perda de Carga, 4-11Perda Ent Anlg, 4-10Perda Fase Ent, 4-11Perda Pot, 4-11Pré-carga Ativa, 4-11ReCorFlxFoLim, 4-11Remoção, 4-9Sobreaq Res FD Int, 4-11Sobtensão, 4-12Termistor do Motor, 4-11VHz Neg Slope, 4-12
Alimentação CAFonte, 1-2Não aterrado, 1-3Não equilibrado, 1-3
Alimentação Não Equilibrada/Não Aterrada, 1-3
Antes de aplicar força, 2-1Arquivo
Aplicações, 3-59Comando de Velocidade, 3-21Comunicação, 3-49Controle Dinâmico, 3-31Controle do Motor, 3-14Entradas e Saídas, 3-53Monitoração, 3-12Utilitário, 3-38
Arquivo-Grupo-Parâmetro, 3-3Aterramento de Filtro EMI/RFI, Filtro
RFI, 1-4Aterramento do Inversor, 1-4Aterramento do Sistema, 1-4Aterramento PE, 1-4Aterramento
Barramento, 1-4Condutor, 1-4Filtro, 1-4Gerais, 1-4Impedância, 1-4Proteções, 1-4Segurança, PE, 1-4
Ativação de hardware, 1-19Auto/Manual
Controle, 1-23Modos, 1-22
Auto-ajust inérc, 3-18Auto-ajuste, 3-17
BBanda Inib freq, 3-23BandaDesvioVel, 3-60Barramento comum, 1-24Bloco de terminais
Bitola do fioE/S, 1-16Encoder, 1-16Potência, 1-9
Potência, 1-10E/S de controle padrão, 1-17E/S de controle vetorial, 1-18E/S Padrão, 1-16Encoder, 1-16, 1-19
Bloco de Terminais de Potência, 1-10

Índice remissivo-2
CCabo Armado, 1-6Cabos Blindados
Potência, 1-6Cabos de Força sem Blindagem, 1-5Cabos de Força/Fiação, 1-5Cabos, Força
Armado, 1-6Blindado, 1-5, 1-6Isolamento, 1-5Sem blindagem, 1-5Separação, 1-5Tipo, 1-5
Canal Z Encoder, 3-21Capacitores de Barramento,
Descarregando, P-3Capacitores de Modo Comum, 1-13Carregar do Conjunto de Usuário, 3-2,
3-40CE
Conformidade, 1-25Requisitos, 1-26
Certificação de normas, A-1Checksum Inv, 3-41Chksum Plac Pot2, 4-8Classe de Tensão, 3-40Classificação do Gabinete, 1-2Classificações do Inversor, A-7Código Alarme x, 3-47Codigo Falha x, 3-46Como energizar o inversor, 2-1Como fazer o link de parâmetros, B-6Como salvar dados, B-4Compensacao, 3-16Comprimentos dos Cabos do Motor, 1-7Comunicações
Configurações do controlador programável, A-4
Palavra de comando de lógica, A-5Palavra de status de lógica, A-6Condicionamento da Potência de
Entrada, 1-3Conduíte, 1-7Conf Saída Analg, 3-54Config Alarme 1, 3-47Config Entr Anlg, 3-53Config Falha x, 3-46Config PI, 3-27ConfigProvaTrq, 3-59
Configuração da ProvaTorq, 3-59Configuração de Preferências, B-4Configurações do controlador
programável, A-4Conjunto de Fusíveis de Entrada, 1-5Conjunto de parâmetros do Vent./
Bomba, 3-39Conjuntos do usuário, B-4Cont Esc Freio, 3-60Cont. Sbrcor Inv, 3-43Cont. Sobrec mot, 3-44Contator de entrada
Partida/Parada, 1-12Contator de saída
Partida/Parada, 1-12Contatores
Bypass, 1-13Entrada, 1-12Saída, 1-12, A-7
Controle Aceleraç, 3-52Auto/Manual, 1-23Desaceleração, 3-52Desliga, 3-51Direção, 3-52Jog, 3-51Local, 3-52MOP, 3-52Partida, 3-51PI, 3-27Referên, 3-52Referência de Velocidade, 1-22Referência, 1-22Remoção de Falha, 3-52
Convenções, Manual, P-2Copycat, B-4Corrente de Saída, 3-12Corrente Fluxo, 3-12Corrente Nominal Plena do Motor, 3-14Corrente Nominal, 3-14Corrente Torque, 3-12
DDado Saida Ax, 3-53DadoPonto Testex, 3-45Dados de Diagnóstico, Visualização,
B-4Dados Entrada Ax, 3-52Dados, Como Salvar, B-4

Índice remissivo-3
Defaults, Voltar p/, 3-40, B-4Descarga Estática, ESD, P-3Descrições de Falhas, 4-4Descrições dos Alarmes, 4-10Designações do Gabinete, A-7Dimensões de montagem, A-15Dimensões
Espaçamentos Mínimos, 1-2Inversor, A-15MontagemPowerFlex 700, A-15, A-17Vista inferior, A-19
Diretriz de Baixa Tensão, 1-25Disjuntores, Entrada, 1-5Dispositivos de entrada
Contatores, 1-12Disjuntores, 1-5Fusíveis, 1-5
Dispositivos de saídaContatores, 1-12, A-7Núcleos de Modo Comum, A-7Terminadores de Cabo, A-7
Div Ref Torque A, 3-18 DriveExecutive, 3-1DriveExplorer, 3-1
EE/S Padrão
BT, 1-16Fiação, 1-15
E/SBloco de Terminais, 1-16Gaveta, 1-16Padrão, 1-15
EMCDiretriz, 1-25Instruções, 1-25
Energizaçãocom auxílio, 2-3Lista de Verificação, 2-1Prova de torque/elevação, 2-3S.M.A.R.T., 2-3
Ent Anlg Sup x, 3-54Ent Escala Sup, 3-48Entr Anlg Inf x, 3-54Entrada CA
Disjuntores, A-7Fusíveis da Linha, A-7Terra, 1-4
Entrada CC, 1-24
Entrada de Pulso, 1-19Entradas Bipolares, 1-15Esc. Ent. Inf., 3-48Esc. Saída Inf., 3-48Esc. Saída Sup., 3-48Esc. Valor Ent., 3-48Esc. ValorSaída, 3-48Escala de Saída Analógica, 3-56Escala Ent Pulso, 3-21Escorr RPM @ I.nom, 3-26ESD, Descarga Estática, P-3Espaçamentos Mínimos, 1-2Especificações
Ambiente, A-2Certificação de normas, A-1Classificações do Inversor, A-7Controle, A-2, A-3Encoder, A-3Especificações Elétricas, A-2Proteção, A-1, A-2
Estrutura do Menu da HIM, B-4Explicação do Número de Catálogo,
P-4
FFalha Corrente, 3-44Falhas
Agrup. Err. E/S, 4-6Aterramento, 4-5Auto-ajuste Abortado, 4-4Band Vel ProvaTorq, 4-8Carga Excessiva, 4-5Chcksum Conf. Usuário, 4-9Chcksum Parâmetro, 4-7Checksum E/S ANV, 4-6Chksum Cal Anlg, 4-4Chksum Plac Pot, 4-8Chksum Plac Pot2, 4-8Curto Fase, 4-7E/S, 4-6E/S ANV, 4-6Energização do Inversor, 4-5Entrada Auxiliar, 4-4Erro Quad Encoder, 4-5FaixaTensão Indut, 4-6Fase p/Ter, 4-7Fila FalhaRemov, 4-5Hardware, 4-5Inib Desacel, 4-5Limite de Sobrevelocidade, 4-7

Índice remissivo-4
Limite Tensão RI, 4-6Parâm valor default, 4-7PCP-PlPt Inc, 4-6PCP-PlPt Substituída, 4-8Perda Comun. E/S, 4-6Perda da Fase de Entrada, 4-6Perda de Carga, 4-6Perda de Fase de Saída, 4-7Perda de Potência, 4-8Perda do encoder, 4-5Perda Ent Anlg, 4-4Perda Ent Pulso, 4-8Perda Porta DPI 1-5, 4-7Perda Pot, 4-8Pino de Proteção, 4-8Porta DPI 1-5, 4-7ReCorFlxFoLim, 4-5Remoção, 4-4Removidas, 4-5Resist FD, 4-4Sobrcorr HW, 4-6Sobrcorr SW, 4-8Sobrecarga do Inversor, 4-5Sobrecarga Motor, 4-6Sobretemp Dissip, 4-5Sobretemp Pl Cont, 4-4Sobretemp Trans, 4-8Sobretensão, 4-7Sobtensão, 4-9Software, 4-8Tent ReinAut, 4-4Termistor do Motor, 4-6Unidade Pot, 4-8
FalhaTens Barram, 3-44Fator Pot. Saida, 3-12Fator sobrec mtr, 3-15FD parado, 3-32Feedback de Velocidade, 3-13Feedback PI inf, 3-29Feedback PI sup, 3-29Feedback Pos Enc, 3-20FGP, 3-3Fiação, 1-1
Ativação de hardware, 1-19E/S, 1-15Encoder, 1-19Potência, 1-5Potenciômetro, 1-20Remoção da Placa de Entrada de
Cabos, 1-7Remoção do Painel de Acesso, 1-7
Fiação de potênciaGerais, 1-7Painel de Acesso, 1-7
Fila de falhas, B-4Filtro boost SV, 3-16Filtro LBPI, 3-29Filtro, RFI, 1-4Fio
Controle, 1-16Sinal, 1-15
Fluxo de Fren., 3-34Fonte de Alimentação, 1-2Fonte de referência de torque, 1-22Fonte Ref Veloc, 3-42Fonte Última Parada, 3-43Fontes do Comando de Velocidade,
1-22Freio dinâmico
Configuração, 3-33Seleção de resistor, 3-34
Freq Comandada, 3-12Freq Filtro Ent., 3-20Freq MOP, 3-13Freq Nominal do Motor, 3-14Freq Saida, 3-12Freq Sobrecarga Motor, 3-15Freq. de Quebra, 3-20Freq. Máxima, 3-16Freqüência de Falha, 3-44Freqüência de Inibição, C-17Frequencia PMW, 3-31Funções e Códigos de Pontos de Teste,
4-16Funções Tecla ALT, B-2Fusíveis
Classificações, A-7Entrada, 1-5
GGanho Comp. Esc., 3-26Ganho Limite Corr, 3-31Ganho Part Movim, 3-35Ganho Prop PI, 3-28Gaveta, E/S, 1-16Grava Cnfg Usuar, 3-40Grava Refer HIM, 3-39Grava Refer. MOP, 3-39Grupo
Ajuste de Velocidade, 3-26Alarmes, 3-47Atributos de Torque, 3-15

Índice remissivo-5
Blocos de escala, 3-48Compensação de Escorregamento,
3-26Config Direção, 3-38Config MOP, 3-39Config Ref HIM, 3-39Controle de Comunicação, 3-49Dados do Inversor, 3-14Dados do Motor, 3-14Diagnósticos, 3-41Entradas Analógicas, 3-53Entradas Digitais, 3-57Falhas, 3-46Feedback de Velocidade, 3-20Limites de Carga, 3-31Links de Dados, 3-52Máscaras e Controles, 3-50Medição, 3-12Memória do Inversor, 3-39Modo & Lim Veloc, 3-21Modos Parada/Frenagem, 3-32Modos Reinicialização, 3-34Perda de Potência, 3-37Processo PI, 3-27Referências de Velocidade, 3-24Regulador de Velocidade, 3-29Saídas Analógicas, 3-54Saídas Digitais, 3-57Taxas Rampas, 3-31Velocidades Discretas, 3-25Volts por Hertz, 3-19
HHIM de LCD
Menus, B-4HIM, Remoção/Instalação, B-8
IIdentificação e Solução de Problemas,
4-1Idioma, 3-40Inércia total, 3-30Inib Partida, 3-42Inibição Freq x, 3-23Instalação, 1-1Instalações de Primeiro Ambiente, 1-26IntegBandaVel, 3-60Interface de Modo Comum, 1-15Interface do Operador, B-5
KK Filtro Entalhe, 3-21Kd Reg Barram, 3-34Ki Reg Barram, 3-33Kp Reg Barram, 3-34kW Nominal, 3-14kWh consumido, 3-13
LLB desejada vel., 3-30LED de MÓD., 4-2LED de PORTA, 4-2LED de POT, 4-2LED de REDE, 4-2LED de STATUS, 4-2LEDs de Status, 4-2Ligação à terra, consulte Aterramento
Parâmetros de Edição, 3-1Lim. força regen, 3-32Limite de taxa de corrente, 3-32Limite de velocidade reversa, C-16Limite Inf PI, 3-28Limite Sobrevel, 3-22Limite Sup de PI, 3-28Limite Trq Neg, 3-19Limite Trq Pos, 3-19Limite veloc rev, 3-23Link de parâmetros, B-6Lista de Verificação, Energização, 2-1Lista Linear, 3-3Localizações das Portas DPI, B-1Loop veloc. Kf, 3-30Loop veloc. Ki, 3-29Loop veloc. Kp, 3-30
MManual de Referência do PowerFlex
700, P-1Manual de Referência, P-1Marcad Energizaç, 3-46Masc. Rem. Falha, 3-51Mascara Acelerac, 3-51Mascara de Jog, 3-51Mascara de Liga, 3-50Mascara de MOP, 3-51Mascara Desacele, 3-51Mascara Direcao, 3-51Mascara Local, 3-51

Índice remissivo-6
Mascara Logica, 3-50Mascara Refer., 3-51Material de Referência, P-2Medid RPM Escorr, 3-26Medid vel circ, 3-30Medidor Erro PI, 3-29Medidor Fdback PI, 3-28Medidor Refer PI, 3-28Medidor Saida PI, 3-29Mem. Barram CC, 3-13Menus da HIM
Armazenamento de Memória, B-4Diagnósticos, B-4Preferências, B-4
Mod Reg Barram A, 3-33Mod Reg Barram B, 3-33Modo ativ-inativ, 3-36, C-19Modo Auto, 1-22Modo Desemp. Trq, 3-15Modo Desemp. Trq, 3-15Modo Direcao, 3-38Modo Fluxo, 3-16Modo Manual, 1-22Modo Parada x, 3-32Modo Parada/Fren x, 3-32Modo Perda Pot, 3-37Modo Remoc Falha, 3-46Modo Sobrecar Inv, 3-31Modo Velocidade, 3-22Modo Velocidade, 3-22Modos de Operação, 1-22Modos, Auto/Manual, 1-22, 4-1Montagem
Espaçamentos, 1-2Orientação, 1-2
MOVs, 1-13Mult Ref Trq B, 3-2, 3-18MWh decorrido, 3-12
NNão-Reconfigurável, 4-1Niv Aces Param, 3-39Niv Saida Dig x, 3-58Nív. ativ-inativ, 3-37Nível Adv Terra, 3-37 Nível de Perda de Carga, 3-38Nivel Fren CC, 3-32Nivel Fren CC, 3-33Nível perda Pot, 3-38Nivelinativo, 3-37
OOpção com controle padrão, 3-3Opção de controle vetorial de fluxo, 3-3Opções de Controle, 3-3
PPalavra de comando de lógica, A-5Palavra de status de lógica, A-6Parâmetro
Descrições, 3-1Lista Linear, 3-3Mudança/Edição, B-5Organização de
Arquivo-Grupo-Parâmetro, 3-3Visualização, B-5
Parâmetros% Curva -S, 3-31% Esc Micropos, 3-60Absol Saida Anlg, 3-54Ajuste Inferior, 3-26Ajuste Sai AnalX, 3-55Ajuste Sai Dig, 3-58Ajuste Superior, 3-26AjusteProvaTrq, 3-59Alarme X Falha , 3-45Alarme X Inver., 3-41Amps Mtr ID., 3-14Auto-ajust inérc, 3-18Auto-ajuste trq , 3-18Auto-ajuste, 3-17Banda Inib freq, 3-23BandaDesvioVel, 3-60Canal Z Encoder, 3-21Carregar do Conj. Usuário, 3-40Checksum Inv, 3-41Classe Tensão, 3-40Código Alarme X, 3-47Codigo Falha 1, 3-46Codigo Falha 2, 3-46Codigo Falha 3, 3-46Codigo Falha 4, 3-46Codigo Falha 5, 3-46Codigo Falha 6, 3-46Codigo Falha 7, 3-46Codigo Falha 8, 3-46Compensacao, 3-16Conf Saída Analg, 3-54Config Alarme 1, 3-47Config Entr Anlg, 3-53Config Falha 1, 3-46

Índice remissivo-7
Config PI, 3-27ConfigProvaTrq, 3-59Cont Esc Freio, 3-60Cont. Sbrcor Inv, 3-43Cont. Sobrec mot, 3-44Controle Aceler, 3-52Controle de JOG, 3-51Controle de MOP, 3-52Controle Desacele, 3-52Controle Desliga, 3-51Controle Direcao, 3-52Controle do PI, 3-27Controle Local, 3-52Controle Partida, 3-51Controle Referen, 3-52ControlRem.Falha, 3-52Corrente Fluxo, 3-12Corrente Nominal, 3-14Corrente Saida, 3-12Corrente Torque, 3-12Dado Saida XX, 3-53DadoPonto TesteX, 3-45Dados Entrada XX, 3-52Div Ref Torque A , 3-18Entr Anlg Inf X, 3-54Entr Anlg Sup X, 3-54Esc Saída AnalX, 3-55Esc.1 Ent. Inf. , 3-48Esc.1 Saída Sup., 3-48Esc.X Ent. Sup., 3-48Esc.X Saída Inf., 3-48Esc.X Valor Ent., 3-48Esc.X ValorSaída, 3-48Escala Ent Pulso, 3-21Escor RPM@ I.nom, 3-26Falha Corrente, 3-44FalhaTens Barram, 3-44Fator Pot. Saida, 3-12Fator sobrec mtr, 3-15FD parado, 3-32Feedback de velocidade, 3-13Feedback PI inf, 3-29Feedback PI sup, 3-29Feedback Pos Enc, 3-20Filtro boost SV, 3-16Filtro LBPI, 3-29Fluxo de Fren., 3-34Fonte Ref Veloc, 3-42Fonte Ult Parada, 3-43Freq Comandada, 3-12
Freq Comandada, 3-12Freq Filtro Ent., 3-20Freq MOP, 3-13Freq Saida, 3-12Freq. de Quebra, 3-20Freq. Maxima, 3-16Freqüência de Falha, 3-44Frequencia PMW, 3-31Ganho Comp. Esc., 3-26Ganho Limite Corr, 3-31Ganho Part Movim, 3-35Ganho Prop PI, 3-28Grava Cnfg Usuar, 3-40Grava Refer HIM, 3-39Grava Refer. MOP, 3-39Hettz Mtr ID., 3-14Idioma, 3-40Inércia Total, 3-30Inib Partida, 3-42Inibição Freq X, 3-23IntegBandaVel, 3-60K Filtro Entalhe, 3-21Kd Reg Barram, 3-34Ki Reg Barram, 3-33Kp Reg Barram, 3-34kW Nominal, 3-14kWh consumido, 3-13LB desejada vel., 3-30Lim. força regen, 3-32Lim. taxa corr., 3-32Limite Inf PI, 3-28Limite Sobrevel, 3-22Limite Sup de PI, 3-28Limite Trq Neg, 3-19Limite Trq Pos, 3-19Limite veloc rev, 3-23Loop veloc. Kf, 3-30Loop veloc. Ki, 3-29Loop veloc. Kp, 3-30Marcad Energizaç, 3-46Masc. Rem. Falha, 3-51Mascara Acelerac, 3-51Mascara de Jog, 3-51Mascara de Liga, 3-50Mascara de MOP, 3-51Mascara Desacele, 3-51Mascara Direcao, 3-51Mascara Local, 3-51Mascara Logica, 3-50Mascara Refer., 3-51

Índice remissivo-8
Medid RPM Escorr, 3-26Medid vel circ, 3-30Medidor Erro PI, 3-29Medidor Fdback PI, 3-28Medidor Refer PI, 3-28Medidor Saida PI, 3-29Mem. Barram CC, 3-13Mod Reg Barram X, 3-33Modo ativ-inativ, 3-36Modo Desemp. Trq, 3-15Modo Direcao, 3-38Modo Fluxo, 3-16Modo Parada X, 3-32Modo Parada/FrenX, 3-32Modo Perda Pot, 3-37Modo Remoc Falha, 3-46Modo Sobrecar Inv, 3-31Modo Velocidade, 3-22Modo Velocidade, 3-22Mult Ref Trq B, 3-18MWh decorrido, 3-12Niv Aces Param, 3-39Nív Perda Carga, 3-38Niv Saida Dig X, 3-58Nív. ativ-inativ, 3-37Nível Adv Terra, 3-37Nivel Fren CC, 3-33Nível perda Pot, 3-38Nivelinativo, 3-37Partid Mov Ativ, 3-35Partida Energiz, 3-34Perc alarm freio, 3-60Perda Ent Anlg X, 3-54Polos motor, 3-15Pot. de Saida, 3-12Potência Mtr ID., 3-15PPR Encoder, 3-20Pre-Carga do PI, 3-28Pre-cargaREFMan, 3-39Pto ajuste trq, 3-19Pto ajuste trq 2, 3-19Pulso Marcador, 3-21Queda RPM @ Inom, 3-32Queda tens indut, 3-17Queda tensão RI, 3-17RaizQuad Ent Anl, 3-53Ref ativ- inativ, 3-37Ref Inf Trq X, 3-18Ref Infer Man BT, 3-25Ref Infer Vel X , 3-24
Ref Sup Trq X, 3-18Ref Super Man BT, 3-25Ref Super Vel X, 3-24Ref Torque X, 3-18Ref. Corr. Trq, 3-19Ref. ent. pulso, 3-25Ref. Operacao, 3-19Ref. Part./Acel, 3-19Ref. velocidade, 3-13Refer % Ajuste, 3-26Refer do PI, 3-27Refer.Corr.Fluxo, 3-17Referên. PI inf., 3-29Referên. PI sup., 3-29Referência MOP, 3-13Remoção Alarme, 3-47Remocao Falha, 3-46Res Logic Inver, 3-49Res. Rampa Inver, 3-49Res. Ref. Inver, 3-49Reset Medid, 3-40Retardo Energiz, 3-34RPM Mtr ID., 3-14Saida AnalgX Inf, 3-55Saida AnalgX Sup, 3-55Sel Entr Digit X, 3-57Sel Feedback PI, 3-28Sel Filtro Fdbk, 3-20Sel Limite Corr, 3-31Sel Ponto TesteX, 3-45Sel Ref Man BT, 3-25Sel Ref Veloc X, 3-24Sel Refer de PI, 3-27Sel Said Ajuste , 3-26Sel Saida AnalgX, 3-55Sel Saida Dig X, 3-58Selec Ent Ajuste, 3-26Selecao Fdbk DPI, 3-50Seleção Porta DPI, 3-50Selecao REF DPI, 3-50SelNivel Fren CC, 3-32Speed Units, 3-21Speed/Torque Mod, 3-23Status controle, 3-19Status do PI, 3-28Status Ent Dig, 3-43Status Falha X , 3-44Status InversorX, 3-41Status Saida Dig, 3-43Taxa Dados DPI, 3-49

Índice remissivo-9
Taxa de Transmissão de Dados DPI, 3-49
Taxa MOP, 3-39TaxaVirLimTrq, 3-60Temp entre tent, 3-35Temp Inv, 3-43TempDslSaidDig X, 3-59TempLigSaidDig X, 3-59Tempo Acelerac X, 3-31Tempo ativo, 3-37Tempo deriv PI, 3-29Tempo Desacele X, 3-31Tempo Falha 1, 3-47Tempo Falha 2, 3-47Tempo Falha 3, 3-47Tempo Falha 4, 3-47Tempo Falha 5, 3-47Tempo Falha 6, 3-47Tempo Falha 7, 3-47Tempo Falha 8, 3-47Tempo Fluxo, 3-16Tempo Fren CC, 3-33Tempo funcionam., 3-12Tempo inativo, 3-37Tempo Integr PI, 3-28Tempo Perda Pot, 3-37Tempo PinoProt, 3-38TempoAjusFreio, 3-60TempoOscVelZero, 3-60TempoPerdaCarga, 3-38Tensão de Quebra, 3-20Tensão de Saida, 3-12Tensão Maxima, 3-15Tensão no Barramento CC, 3-13Tensão Nominal, 3-14Tent ReinAut, 3-35Tipo do Motor, 3-14Tipo Fdbk motor, 3-20Tipo Resistor FD, 3-34Tipo Sobrec Mtr, 3-15TolerânciaOscil, 3-60Torque comandado, 3-13TpoDestravFreio, 3-60Unid Pot Mtr ID., 3-15Val Limite Corr, 3-31Val. Ent. Anal 1, 3-13Val. Ent. Anal 2, 3-13Valor Porta DPI, 3-50Vel Preset X, 3-25Veloc Minima, 3-22
Veloc. de Jog 1, 3-25Veloc. de Jog 2, 3-25Veloc. de Jog, 3-25Veloc. Encoder, 3-20Veloc. rampeada, 3-13Velocidade falha, 3-44Velocidade Max., 3-22Versão SFW, 3-14Volta p/ Default, 3-40Volts Mtr ID., 3-14
Parâmetros de 32 bits, 3-2Partid Móv Ativ., 3-35Partida Energiz, 3-34, C-21Partida/Parada Repetida, 1-12Perc alarm freio, 3-60Percurso perda de energia, C-12Perda EntAnlg, 3-54Placa de Entrada de Cabos
Remoção, 1-7Terminal SHLD, 1-4
Pólos do Motor, 3-15Portas, Tipo DPI, B-1Pot. de Saida, 3-12Potência Mtr ID., 3-15Potenciômetro de Entrada, 1-20Potenciômetro de Velocidade, 1-20Potenciômetro, Fiação, 1-20PPR Encoder, 3-20Pré-carga da Ref. Man, 3-39Pre-Carga do PI, 3-28Pré-carga, 1-24Precauções gerais, P-3Preferências, Configuração, B-4Processo PI
Controle padrão, C-13Programação, 3-1Proteção contra Curto-circuito, 1-5Prova de Torque, C-2Prova de torque/elevação, C-2Pto Ajuste Saída Anlg, 3-56Pto Ajuste Saída Dig, 3-58Pto ajuste trq 2, 3-19Pto ajuste trq, 3-19Publicações, Referência, P-2Pulso Marcador, 3-21
QQueda RPM @ I.Nom, 3-32Queda tens indut, 3-17Queda tensão RI, 3-17

Índice remissivo-10
RRaizQuad Ent Anl, 3-53Ref ativ- inativ, 3-37Ref Cor Torq Mtr, 3-19Ref Entrada Pulso, 3-25Ref Infer Man BT, 3-25Ref Infer Vel A, 3-24Ref Infer Vel B, 3-24Ref Super Man BT, 3-25Ref Super Vel B, 3-24Ref Super Veloc A, 3-24 Ref Torque Inf x, 3-18Ref Torque Sup x, 3-18Ref. Operacao, 3-19Ref. Part./Acel, 3-19Ref. velocidade, 3-13Refer % Ajuste, 3-26Refer do PI, 3-27Refer.Corr.Fluxo, 3-17Referência Cruzada de Parâmetros
por Nome, 3-61por Número, 3-64
Referência de MOP, 3-13Referência PI Inf, 3-29Referência PI Sup, 3-29Remoção da Placa Inferior, 1-7Remoção da Tampa, 1-1Remoção de Alarme, 3-47Remoção de alarmes, 4-9Remoção de Falhas, 4-4Remoção do Painel de Acesso, 1-7Remocao Falha, 3-46Res Logic Inver, 3-49Res. Rampa Inver, 3-49Res. Ref. Inver, 3-49Reset Medid, 3-40Resistor de freio externo, C-1Restaurar os defaults de fábrica, 3-40,
B-4Retardo Energiz, 3-34RPM Mtr ID., 3-14
SSaida Analg1 Inf, 3-55Saida Analg1 Sup, 3-55Saida Analg2 Inf, 3-55SCANport
Controle vetorial, P-5Sel Entr Digit x, 3-57Sel Feedback PI, 3-28Sel Filtro Fdbk, 3-20
Sel Limite Corr, 3-31Sel Ponto Teste1, 3-45Sel Ref Man BT, 3-25Sel Ref Torque x, 3-18Sel Ref Veloc A, 3-24Sel Ref Veloc B, 3-24Sel Refer de PI, 3-27Sel Said Ajuste, 3-26Sel Saida Analg 1, 3-55Sel Saida Analg 2, 3-55Sel Saida Digx, 3-58Selec Ent Ajuste, 3-26Seleç. Porta DPI, 3-50Seleção da Referência de Velocidade,
1-22Selecao Fdbk DPI, 3-50Selecao REF DPI, 3-50Sintomas Comuns e Ação Corretiva,
4-13Sistemas de Distribuição Não
Aterrados, 1-13Sistemas de Distribuição
Não aterrado, 1-3Não equilibrado, 1-3
Sobrecarga Motor, C-10Sobrevelocidade, C-11Speed/Torque Mod, 3-23Status de Controle, 3-19Status do PI, 3-28Status Ent Dig, 3-43Status Falha 1, 3-44Status Inversor1, 3-41Status Saida Dig, 3-43Subtensão
Alarme, 4-12Falha, 4-9
Suportes de Cabos, 1-7
TTamanho de Gabinete do Inversor, P-3Tampa, Abertura, 1-1Taxa Dados DPI, 3-49Taxa de Transmissão de Dados DPI,
3-49Taxa MOP, 3-39TaxaVirLimTrq, 3-60Tecla ALT
Funções, B-2Tecnologia de Controle do Motor, C-8Temp entre tent, 3-35Temp Inv, 3-43

Índice remissivo-11
TempDesl Saída Digitx, 3-59Temperatura Ambiente, 1-2Temperatura de Operação, 1-2TempLigSaidDig x, 3-59Tempo Aceleraç x, 3-31Tempo ativo, 3-37Tempo deriv PI, 3-29Tempo Desacele x, 3-31Tempo Falha 1, 3-47Tempo Fluxo, 3-16Tempo Fren CC, 3-33Tempo funcionam. Decorrido, 3-12Tempo inativo, 3-37Tempo Integr PI, 3-28Tempo Perda de Potência, 3-37Tempo PinoProt, 3-38TempoAjusFreio, 3-60TempoOscVelZero, 3-60TempoPerdaCarga, 3-38Tensão de Quebra, 3-20Tensão de Saída, 3-12Tensão Máxima, 3-15Tensão no Barramento CC, 3-13Tensão Nominal do Motor, 3-14Tensão Nominal, 3-14Tent ReinAut, 3-35Terminal SHLD, 1-4Tipo Fdbk Motor, 3-20Tipo Motor, 3-14Tipo Resistor FD, 3-34Tipos de Alarmes e Falhas, 4-1Tolerância de tensão, C-24TolerânciaOscil, 3-60Torque Comandado, 3-13Torque de Auto-ajuste, 3-18TpoDestravFreio, 3-60
UUnid Pot Nom Mtr, 3-15Unidades de Velocidade, 3-21
VVal Limite Corr, 3-31Valor Ent. Analóg. x, 3-13Valor Porta DPI, 3-50Vel Preset x, 3-25Veloc. de Jog, 3-25Veloc. rampeada, 3-13Velocidade do Encoder, 3-20Velocidade falha, 3-44Velocidade Max., 3-22Velocidade Mínima, 3-22, C-7Versão SFW, 3-14Visualização de parâmetros
AvançadosControle Padrão, 3-6
Vent./Bomba, 3-11Controle vetorial, 3-8
BásicosControle Padrão, 3-4
Vent./Bomba, 3-10Controle vetorial, 3-5
Visualização e Mudança de Parâmetros, B-5
Voltar p/Defaults, 3-40, B-4
WWebsites, consulte WWW, World Wide
WebWWW, World Wide Web, 1-1, P-1, P-2,
Posterior-2

Índice remissivo-12


Publicação 20B-UM001G-PT-P – Agosto de 2004 P/N 195688-P02Substitui a publicação 20B-UM001A-PT-P - abril de 2001 Copyright © 2004 Rockwell Automation, Inc. Todos os direitos reservados. Impresso nos EUA.