Embed Size (px)
Citation preview

Deformações
1
DEFORMAÇÕES
2.1 INTRODUÇÃO
Neste capítulo procede-se ao estudo da Mecânica de Deformação do Sólido numa
perspectiva macroscópica, isto é, ignorando o que se passa ao nível atómico e
molecular. Para se proceder a esse estudo começar-se-á pelo estado de deformação
associado a um problema uniaxial, procedendo-se seguidamente à generalização para o
comportamento tridimensional. O facto de se considerar uma abordagem não
microscópica do comportamento do sólido é considerado adequado para efeitos da
análise do comportamento do sólido quer ao nível linear quer não linear. Este tema foi
abordado por vários autores, nomeadamente, Malvern [1969], Ogden [1984], Truesdell
and Noll [1992], Ogden [1997] e Holzapfel [2000]. A fim de se estudar os vários
conceitos de Deformação e as suas propriedades duma perspectiva tridimensional,
começa por fazer-se uma breve introdução ao conceito de deformação no caso uniaxial.
Os conceitos são introduzidos por forma a incluir comportamentos não lineares, a
fim de introduzir os conceitos é conveniente considerar um sólido genérico, B, descrito
como um conjunto contínuo de elementos, x, designados por partículas ou pontos
materiais que ocupam uma determinada região do espaço de volume V e superfície
limítrofe S. O conhecimento da posição de todos os pontos do sólido B num
determinado instante em relação a uma origem considerada fixa permite que se defina a
configuração do sólido nesse instante, como se representa na figura 2.1.

Deformações
2
Figura 2.1: Configuração Inicial e Deformada do sólido.
A escolha do sistema de eixos de referência pode ser feita considerando um
sistema de eixos em que os pontos sejam referidos na configuração inicial do sólido ou
num sistema de eixos associado à configuração deformada do sólido. No caso dos
comportamentos uniaxiais um eixo é suficiente para definir a posição do ponto do
sólido.
2.2. SÓLIDO UNIAXIAL
O sólido elementar, mais simples que pode ser considerado é linear, um elemento
de barra, de comprimento l e secção transversal circular, por exemplo, como se
representa na figura 2.2. Durante o processo de deformação, ocorre um alongamento ou
encurtamento da barra como se representa na figura. O alongamento relativo sofrido
pela barra é designado por, λ e é definido como sendo:
i
o oi
λ = = ∑∑
l
lll
(2.1)
O alongamento relativo, λ , é uma grandeza adimensional que tem um valor
unitário para a barra não deformada, no caso presente se li não depender da posição, x
do ponto sobre a barra o alongamento é independente da posição x do ponto sobre a
barra.
2x
3x
1x
x x*

Deformações
3
Figura 2.2: Alongamento de um elemento linear.
As quantidades normalmente designadas por deformações, podem ser
estabelecidas com base na quantidade designada por alongamento, sendo a quantidade
de deformação mais usual, a variação do alongamento por unidade de comprimento, ou
deformação usual em Engenharia, muitas vezes designada nos textos clássicos de
Engenharia por Extensão e é definida como sendo:
1o
o −λ=−
≡εl
ll (2.2)
Outra grandeza susceptível de quantificar a deformação do sólido é a chamada
deformação natural que é definida como sendo:
λ−=
−=
11e ol
ll (2.3)
A deformação de Lagrange é definida como sendo para o caso da barra
traccionada, metade da variação dos quadrados do comprimento por unidade de
quadrado do comprimento inicial,
( )121
21 2
2o
2o
2
−λ=
−=
l
llE (2.4)
Note-se que no caso de ser 1λ << a quantidade E, é praticamente igual a
( ) ( )
−λ≅+λ−λ= 111
21, Eε .
lo
l
oil
il
x
x*

Deformações
4
A chamada deformação de Euler para o elemento linear atrás referido é definida
como sendo
λ−=
−=∗
22
2o
2 1121
21
l
llE (2.5)
Outra grandeza que tem sido utilizada para quantificar as deformações é a
chamada deformação logarítmica:
o o
d nη = =∫l
l
l ll
l l( ) =+=
∆+= ε1n1n
o
ll
ll
...41
31
21 432 +−+−= εεεε (2.6)
a qual no caso de ser 1<<ε implica εη = .
No caso do processo de deformação não ser uniforme ao longo do elemento
linear, a variação de comprimento l∆ depende da posição do ponto ao longo da barra.
Considere-se o elemento linear subdividido em elementos de comprimento inicial oil e
comprimento final il , sendo lLlLll ni21 ≠≠≠≠≠ . O alongamento relativo sofrido
por cada elemento no processo de deformação é ioii ll=λ .
O comprimento final pode ser calculado a partir do conhecimento da função
( )xλ , cuja evolução possível com x se representa na figura 2.3, e do comprimento
inicial ol , do seguinte modo:
( ) dxxo
ooii ∫ λ=λΣ=l
ll (2.7)
No caso da deformação ser uniforme ( ) tetanconsx o == llλ .
Figura 2.3: Alongamento variável ao longo do eixo da barra.
( )xλ
x oiii ll=λ
Deformações
5
Um ponto P, sobre o elemento linear inicial, tem coordenada x na configuração
inicial e ocupa a posição P∗ , na configuração deformada, à qual corresponde a
coordenada ( )x* x= φ . A função ( )xλ pode ser definida do seguinte modo:
( ) ( ) ( ) ( )xd
xdx
xxx0x
limx φ
=∆
φ−∆+φ→∆
=λ (2.8)
O comprimento l pode ser calculado, a partir de x* na configuração deformada,
do seguinte modo:
( ) ( )∫∫ λ=φ= o
ooxdxxd
lll (2.9)
A quantificação da função ( )xλ e/ou ( )xφ é necessária para efeitos de
quantificação das deformações quando o processo de deformação é não uniforme.
As grandezas referidas para quantificar a deformação são em termos de
deformação todas susceptíveis de quantificar o alongamento sofrido pela barra, a
relevância de uma em relação às outras advém do facto de no processo de deformação
ser necessário relacionar as mudanças geométricas sofridas pelo sólido com as acções
que as produziram através de uma lei constitutiva.
2.3. COORDENADAS DE EULER E DE LAGRANGE
O conhecimento do processo de deformação de um sólido passa necessariamente
pelo conhecimento da configuração inicial do sólido, B. A identificação da posição de
um ponto de um sólido tridimensional é em geral feita através do vector de posição do
ponto referido a um sistema de eixos coordenados no espaço, por exemplo, o sistema de
eixos representado na figura 2.4. A configuração inicial do sólido pode ser coincidente
com a configuração de referência no caso de se considerar uma formulação de Lagrange
ou material. O sólido, B, representado tem o volume V contornado por uma superfície S,
sendo a posição de um ponto P da linha L do sólido referenciado no espaço através das
coordenadas x,x,x 321 ou seja através do vector de posição do ponto, x, numa descrição
Lagrangeana do sólido. As grandezas físicas relevantes como por exemplo, a velocidade
podem ser consideradas função das coordenadas x, referidas à configuração de
referência v=v(x,t).

Deformações
6
Figura 2.4: Sólido no Espaço Tridimensional.
O sólido está sujeito a um processo durante o qual ocorrem deformações e passa
da configuração inicial não deformada a uma configuração subsequente deformada
como se representa na figura 2.5. Para caracterizar o processo de deformação pode
considerar-se uma função de deformação ou de mapeamento ( )xφ , entre o sólido
deformado ( )Vφ e o sólido inicial, V, tal que a posição do ponto P, na configuração
deformada, ( )φ P , seja definida do seguinte modo:
( )xx φ=* (2.10)
sendo x* o vector de posição do ponto ( )∗ =φP P , posição do ponto P na configuração
deformada, referido à base de vectores 1 2 3, ,e* e* e* .
No caso da posição do ponto P ser referida considerando como referência a
configuração deformada do sólido, a descrição do sólido é dita Euleriana ou espacial.
Neste caso as grandezas físicas consideradas relevantes são definidas considerando
como referência a configuração deformada, a velocidade, por exemplo passa a ser
v=v*(x*,t) .
x
2e
1e
3e P
V
S
L

Deformações
7
Figura 2.5: Configuração Deformada e Configuração Inicial do Sólido.
A função de deformação ou mapeamento ( )xφ estabelece uma correspondência
entre as grandezas geométricas na configuração inicial e na configuração deformada do
sólido.
2.4. ALONGAMENTO DE UMA LINHA L
Considere-se o sólido na configuração inicial, V e o sólido na configuração
deformada ( )Vφ e no sólido considere-se uma linha L e sobre a qual o ponto P cujo
vector de posição é ( )x s , onde s representa a coordenada paramétrica da curva L,
identificadora da posição do ponto sobre a curva.
A linha L entre os pontos ( )s=P xr
e ( )s s= + ∆Q xr
percorre uma distância
∆ s e o vector que une os dois pontos P e Q na configuração inicial do sólido é
( ) ( )s s s= ∆ = + ∆ −PQ x x x sendo o comprimento do vector ∆x , a distância entre
os pontos P e Q. Na configuração deformada os dois pontos ocupam as posições ( )s*x
e ( )ss* ∆+x , respectivamente. O vector que une os dois pontos, P* e Q*, na
configuração deformada é ( ) ( )s*ss** xxx −∆+=∆ e o comprimento do vector *x∆
representa a distância entre os dois pontos na configuração deformada. Na figura 2.6
representa-se o vector PQ na configuração inicial e deformada do sólido. O sistema de
( )xφ
( )Lφ
( )P*P φ=
( )VφV
L
x
P
S
O
( )xx φ=*
( )Sφ
2 2,e e*
3 3,e e*
1 1,e e*
Deformações
8
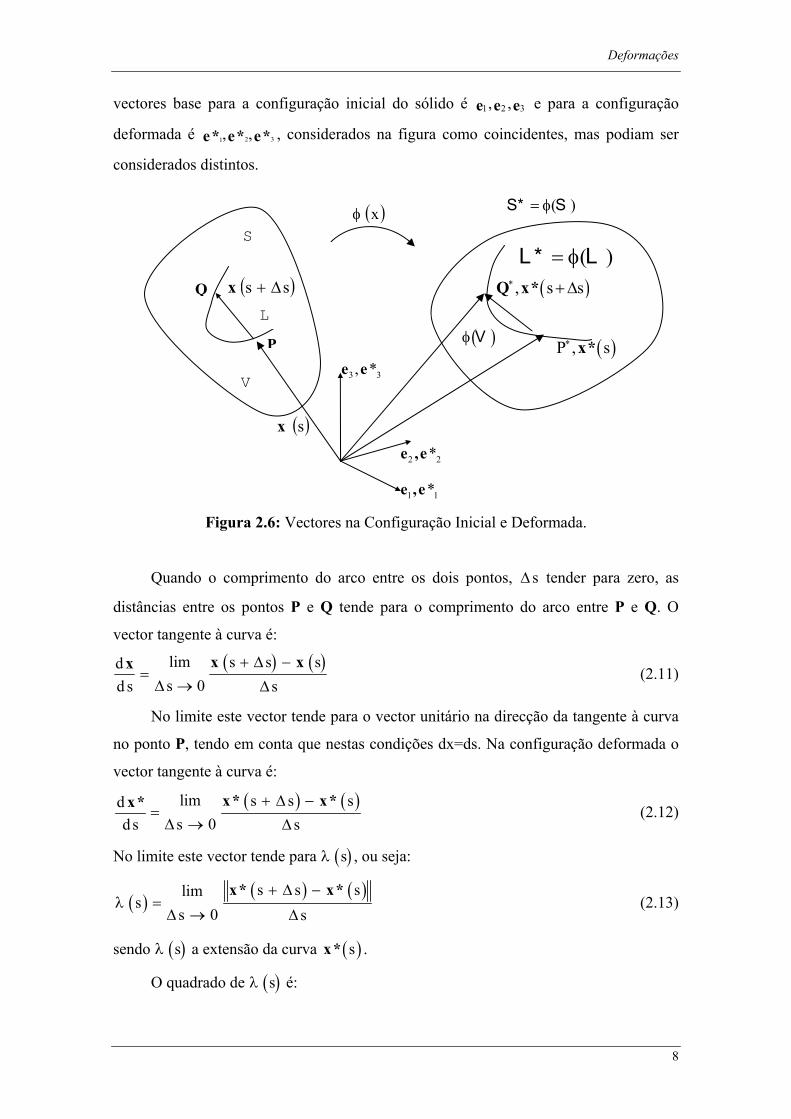
vectores base para a configuração inicial do sólido é eee 321 ,, e para a configuração
deformada é 2 31, ,e* e* e* , considerados na figura como coincidentes, mas podiam ser
considerados distintos.
Figura 2.6: Vectores na Configuração Inicial e Deformada.
Quando o comprimento do arco entre os dois pontos, ∆ s tender para zero, as
distâncias entre os pontos P e Q tende para o comprimento do arco entre P e Q. O
vector tangente à curva é:
( ) ( )dd s s
s s ss
x x x=
→+ −lim
∆∆∆0
(2.11)
No limite este vector tende para o vector unitário na direcção da tangente à curva
no ponto P, tendo em conta que nestas condições dx=ds. Na configuração deformada o
vector tangente à curva é:
( ) ( )lim s s sds 0ds s
+ ∆ −=∆ → ∆
x* x*x* (2.12)
No limite este vector tende para ( )λ s , ou seja:
( ) ( ) ( )s s slims
s 0 s+ ∆ −
λ =∆ → ∆
x* x* (2.13)
sendo ( )λ s a extensão da curva ( )sx* .
O quadrado de ( )λ s é:
( )φ V
2 2*e ,e
1 1*e ,e
3 3, *e eV
P
S
( )ss ∆+xQ
( )xφ
( )sx
L ( ), s s∗ +∆Q x*
( )P , s∗ x*
( )= φS* S
( )= φL* L

Deformações
9
( )2 d dsd s d s
λ =
x* x* (2.14)
No caso de se considerar ∆s sobre a curva ( )φ L na configuração deformada, o
vector d d sx* tende para o vector unitário e o comprimento do vector
( )d d s sx → 1 λ . Nestas condições é:
( )1 2λ s dd s
dd s
=
x x (2.15)
Este tipo de descrição do comportamento do sólido é designado por descrição de
Euler.
Na formulação baseada na descrição de Lagrange da deformação, ∆s é
considerado sobre a curva na configuração inicial e o alongamento relativo é definido
de acordo com a equação 2.13 ou seja com base nos vectores de posição na
configuração deformada estabelecidos em termos do parâmetro, s, na configuração
inicial. Na descrição Euleriana a extensão é definida considerando ∆s sobre a
configuração deformada ou seja de acordo com a equação 2.15.
2.5. GRADIENTE DE DEFORMAÇÃO
O vector ( )sx* está relacionado com o vector de posição ( )x s através da função
de deformação ou de mapeamento, φ, ou seja:
( ) ( )( )s s= φx* x (2.16)
Derivando em ordem ao parâmetro s da curva L não deformada, obtém-se:
( )d dds ds
= ∇ φx* xx (2.17)
onde as componentes ∇φ são as derivadas de φ em ordem a x, ou seja
( )[ ]∇ =φ ∂φ ∂x ij i jx (2.18)
O gradiente da função ( )φ x é o chamado gradiente da deformação e é
usualmente designado por ( )xF φ∇= . A equação 2.17 pode ser escrita com a seguinte
forma:

Deformações
10
d dds ds
=x* xF (2.19)
O gradiente da deformação, F, contém informação acerca do modo como se
modifica o comprimento da curva L, entre dois pontos, contém também informação
acerca do tipo de movimentos que sofre a curva L. A equação 2.19 é por vezes escrita
com a forma
dx* =F dx (2.20)
atendendo ao facto de o elemento, ds, ser considerado sobre a configuração inicial do
sólido.
Designando os vectores base na configuração inicial por ei e os vectores base na
configuração deformada por ie* , o tensor F é um tensor com a base tensorial i j* ⊗ e e
e pode exprimir-se em termos das suas componentes Fij, com seguinte forma:
( )ii j ij i j
j
Fx
∂ φ = ⊗ = ⊗ ∂
xF e* e e* e
(2.21)
O produto F dx/ds da equação 2.19 pode ser calculado a partir das componentes
Fij do tensor F, ou seja
( )ij i j k kd Fds
= ⊗ = xF e* e n e ij k i j kF ⊗ = n e* e e ij j iF n e* (2.22)
tendo em conta que n xk d d s= e que i j k jk i ⊗ = δ e* e e e* de acordo com a definição
do produto tensorial de vectores.
O vector representado na equação 2.22 é um vector na configuração deformada e
é:
ij j id Fds
=x* n e*
Note-se que o tensor F é um tensor que está ligado às coordenadas do ponto na
configuração inicial, sendo portanto a descrição permitida pela equação 2.22 uma
descrição Lagrangeana.
As componentes do tensor gradiente de deformação, F, podem ser escritas com a
seguinte forma:

Deformações
11
1 1 1 1 1 1
1 2 3 1 2 3
2 2 2 2 2 2
1 2 3 1 2 3
3 3 3 3 3 3
2 21 3 1 3
x x xx x x x x x
x x xx x x x x x
x x xx x x xx x
∂ ∂ ∂ ∂φ ∂φ ∂φ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂φ ∂φ ∂φ
≡ = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂φ ∂φ ∂φ ∂ ∂ ∂ ∂ ∂ ∂
* * *
* * *F
* * *
(2.23)
O tensor gradiente pode representar, movimentos de corpo rígido locais e globais,
como sejam rotações em torno de um eixo e pode representar alongamentos ou
extensões numa ou mais direcções, nomeadamente estados de extensão pura.
Exemplo 2.1
Num dado instante do tempo a relação entre as coordenadas de um ponto na
configuração inicial e final é: 2
1 1 1 2 3 3 2x * x x ; x * x ; x * x= + = − =
Calcule o gradiente da deformação F.
Solução:
1 1 1
21 31
2 2 2
1 2 3
3 3 3
1 2 3
x x xx xx 1 2x 0 0
x x x 0 0 1x x x
0 1 0x x xx x x
∂ ∂ ∂ ∂ ∂ ∂ + ∂ ∂ ∂ ≡ = − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
* * *
* * *F
* * *
No caso de ser 0x1 = , o tensor F é:
−≡010100
001F , corresponde portanto a um tensor de rotação R, sendo TF F = I e
detF = 1.
Consequentemente o ponto { }32 x,x0, sofreu um movimento de corpo rígido
entre a posição inicial e a posição deformada, embora o sólido como um todo possa ter
sofrido deformações.

Deformações
12
No caso da relação entre coordenadas do ponto na configuração inicial e
deformada ser:
1 1 2 3 3 2x * x ; x * x ; x * x= = − =
todo o sólido sofreria uma rotação em torno do eixo 1Ox como se representa na figura
2.7.
As deformações de um ponto cujo vector de posição na configuração inicial é x
são caracterizadas pela mudança de distâncias entre dois pares de pontos na
vizinhança de x. Um elemento dx transforma-se no elemento material dx* = F dx
qualquer que seja o estado de deformação em x. No caso do exemplo anterior verificou-
se que no caso do gradiente de deformação ser um tensor ortogonal e anti-simétrico
não existe variação de comprimento dos elementos na vizinhança de x existindo só
rotação.
Figura 2.7: Rotação de um elemento no plano 32 , xx .
No caso F ser um tensor simétrico, U, tal que dX = F dx = U dx, o material na
vizinhança do ponto x está num estado de deformação pura em relação à configuração
de referência. No caso particular de ser X = Ux (U tensor constante), o sólido inteiro
está num estado de extensão pura.
No caso do tensor U ser um tensor real e simétrico, existem três direcções
mutuamente ortogonais, em relação às quais o tensor U é um tensor diagonal.
Designando por ,,, 321 eee as três direcções mutuamente ortogonais que podem ser
3x
2x 2x*
3x*( )xφ
−=010100
001R

Deformações
13
designadas por direcções principais e por ,,, 321 λλλ os valores próprios
correspondentes, então o tensor U no sistema de eixos principais é:
λλ
λ≡
3
2
1U (2.24)
ou seja 1 1 1 2 2 2 3 3 3dx * dx ;dx * dx ;dx * dx= λ = λ = λ .
Os valores próprios do tensor U são as extensões ou alongamentos principais.
Exemplo 2.2
No caso da relação entre as coordenadas de um ponto na configuração inicial e
as coordenadas de um ponto na configuração deformada ser:
1 1 2 2 3 3x * 3x ; x * x ; x * 4x= = =
Determine os alongamentos sofridos pelos elementos lineares OP, OQ e OR
representados na figura e no sistema de eixos principais.
Solução:
O tensor gradiente é:
≡
400010003
F
sendo portanto um tensor real e simétrico e independente das coordenadas do ponto x,
o estado de deformação correspondente é um estado de deformação puro e homogéneo
correspondendo a estado de pura extensão do sólido.
O alongamento sofrido pelo elemento OP é 31/31 ==λ ; O alongamento sofrido
pelo elemento OQ é 41/43 ==λ . O elemento OR tem um comprimento inicial 1.414
e um comprimento final 5, sendo o alongamento OR 5 /1.414λ = .

Deformações
14
Figura 2.8: Alongamento de um elemento no plano 32 , xx .
2.6. TEOREMA DA DECOMPOSIÇÃO POLAR
Verificou-se que se podem considerar dois tipos de gradiente F; um tensor
ortogonal, designado por R que descreve movimentos de corpo rígido e um tensor real e
simétrico designado por U que descreve estados de deformação pura com extensões
segundo as direcções principais. É possível demonstrar que um tensor real F com
determinante não nulo, condição necessária à existência de 1−F , pode ser sempre
decomposto no produto de dois tensores um tensor ortogonal R e um tensor simétrico
U, isto é:
F = R U ou F = V R (2.25)
Nestas igualdades U e V representam tensores simétricos reais e positivos
definidos e R é um tensor ortogonal. Estas equações são conhecidas por Teorema da
Decomposição Polar. A decomposição representada nas duas equações anteriores é
única, existe um só R, um só U e um só V que satisfaz as condições anteriores. O tensor
U é designado por tensor dos alongamentos relativos à direita e V é designado por
tensor dos alongamentos relativos à esquerda.
Para um dado elemento do sólido, verificou-se ser
1x
1x *
2x
3x1.414
1.0
1.0
Q
O R
P
2x *
3x *
O4.0
5.0
3.0

Deformações
15
dx* = F dx = R U dx (2.26)
Nesta equação U dx descreve um processo de deformação pura no qual existem
três direcções mutuamente ortogonais, os vectores próprios de U, na direcção dos quais
os elementos lineares do sólido sofrem extensões ou contracções mas não sofrem
rotações. Na figura mostra-se o efeito do tensor U num sólido esférico cuja
configuração após a deformação é um elipsoide. O efeito do tensor R em U dx consiste
em provocar uma rotação de corpo rígido como se representa na figura 2.9.
Figura 2.9: Alongamento da Secção de uma Esfera.
O efeito do gradiente de deformação, F, foi contabilizado considerando um
processo de deformação pura seguido de um movimento de corpo rígido, o mesmo
efeito poderia ser obtido invertendo a ordem dos processos, ou seja considerando
F=VR.
Tendo em conta que F=RU=VR e que T =RR I conclui-se que: T=U R VR ou
TRURV = .
O cálculo de U, V e R a partir de F é uma operação possível e como já foi referido
a solução é única.
Exemplo 2.3
Considere-se o elemento rectangular AB representado na figura e considere o
tensor gradiente de deformação F = RU = VR, para o qual é:
RUdx A
B P
Q
dx
x
φ (Q) φ (A)
φ (B) φ (P)
Udx x*
x2, x*2
O, x3, x*3

Deformações
16
=
1002
U e
−=
0110
R
e determine o tensor F e o tensor V do processo de deformação.
Solução:
O efeito da aplicação do tensor U ao elemento AB corresponde à manutenção
das dimensões segundo 2x e à duplicação da dimensão segundo 1x como se representa
na figura. O efeito da aplicação do tensor R corresponde a uma rotação de 90o como se
representa também na figura. Correspondendo a um gradiente de deformação F que é:
F = R U
O gradiente F é:
−=
−==
0210
1002
0110
URF
Figura 2.10: Alongamento e Rotação de um Elemento Rectangular no Plano 1x , 2x .
O tensor V é:
=
−
−===
2001
0110
1002
0110TT RURRFV
{ }1d4−
=x*
{ }12=dx *
=1002
U
−
=0110
R
−
=0110
R
=2001
V
{ }4d1
=x *
{ }2d1
=x
A B

Deformações
17
Considere o tensor gradiente de deformação F e multiplique-se á esquerda pelo
tensor TF , tendo em consideração que F = R U, obtém-se:
[ ] [ ] [ ] UUURRUURURFF TTTTT === (2.28)
ou seja:
FFUUU TT2 ==
que representa o quadrado do tensor dos alongamentos relativos. A partir do qual se
obtém:
( ) 2/1T FFU = (2.29)
Uma vez obtido U, o tensor de rotação R pode ser facilmente determinado, do
seguinte modo:
1−= UFR (2.30)
uma vez que
IUUUUFFU == −−−− 1211T1 (2.31)
Note-se que no caso do tensor U ser simétrico é:
( ) IRRUFUFUFFU === −−−− T1T11T1 (2.32)
confirmando o factor de R ser um tensor ortogonal.
O tensor das tensões à esquerda, V, pode ser obtido a partir do tensor das
extensões à direita por uso da seguinte fórmula:
TT RURRFV == (2.33)
Os tensores 2U e 2V são tensores que caracterizam a deformação num ponto
assim como outros tensores que possam ser obtidos com uma relação única com as
quantidades relevantes para efeitos de caracterização do estado de deformação num
ponto.
Exemplo 2.4
Considere as relações seguinte entre as coordenadas de um ponto na
configuração deformada e as coordenadas de um ponto na configuração inicial:
1 1 2 3 3 2x * x , x * 3x , x * 2x= = =

Deformações
18
Determine:
a) O tensor gradiente de deformação F.
b) O tensor das extensões à direita U.
c) O tensor de rotação R.
d) O tensor das extensões à esquerda V.
Solução:
a)
1 1 1
1 2 3
2 2 2
1 2 3
3 3 3
1 2 3
x x xx x x 1 0 0
x x x 0 0 3x x x
0 2 0x x xx x x
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ≡ = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
* * *
* * *F
* * *
b)
=
===
900040001
020300001
030200001
TT2 FFUUU
donde se obtém
=
300020001
U
c) O tensor 1−U é:
=−
3/10002/10001
1U
O tensor R é:
== −
010100001
1UFR
d) O tensor V é:
=
==
200030001
010100001
020300001
TRFV

Deformações
19
Exemplo 2.5
Mostre que se for 2211 URURF == , então 21 RR = e 21 UU = .
Solução:
Tendo em conta que 2211 URURF == então T22
T11
F RURUF == e
consequentemente é: 22
2122
T2211
T11
F UUURRUURRUFF ==== . Os
tensores 1U e 2U , são positivos definidos consequentemente é 21 UU = .
Exemplo 2.6
Mostre que se for 'VRRUF == , então 'RR = .
Solução:
Note-se que 'VR pode ser escrito com a seguinte forma
( ) ( )1−= =' ' ' ' ''-1'VR R VR R VRR R
Por outro lado é:
( )= = =' ' ''-1F RU R VR R UR
Consequentemente é:
'RR =
2.8. TENSOR DAS DEFORMAÇÕES DE GREEN E DE LAGRANGE
O quadrado da extensão ( )λ2 s é de acordo com a expressão 2.14, o quadrado do
comprimento do vector d d sx* , o qual de acordo com a equação 2.22, pode ser
calculado a partir do tensor gradiente da deformação F. O vector F n tem um
comprimento que é igual à extensão ( )λ n , sendo a extensão uma função do vector
tangente n, o quadrado da extensão é:

Deformações
20
( )λ2 n F n F n= . (2.34)
para qualquer vector unitário n da configuração deformada.
Considere-se o produto F n F n = n F F n. . T , sendo o produto tensorial FFT
que aparece na expressão designado por Tensor das Deformações de Green, C, ou
seja:
C F F= T (2.35)
A extensão de um segmento com a orientação n na configuração inicial é de
acordo com a equação 2.34 e tendo em conta a definição das deformações de Green,
calculado do seguinte modo:
( )2 .λ =n n Cn (2.36)
A deformação de Lagrange definida por 2.3 em termos da extensão λ, para
problemas uniaxiais, pode ser definida para o caso tridimensional como sendo
( ) ( )[ ] nEnnnE .121 2 =−λ= (2.37)
onde E é o tensor das deformações de Lagrange definido a partir do tensor das
deformações de Green, com a seguinte forma:
[ ]ICE −=21 (2.38)
Os tensores C e E são tensores simétricos como resulta da definição do tensor C,
uma vez que o produto de um tensor pelo transposto do tensor é um tensor simétrico.
O tensor F, gradiente da deformação, pode ser decomposto no produto de dois
tensores atendendo ao Teorema da Decomposição Polar, do seguinte modo:
F = R U (2.39)
onde R é um tensor de rotação cuja função é mudar a direcção de um vector sem alterar o
seu comprimento e Ué um tensor de extensões cuja função é mudar o comprimento de um
vector sem alterar a sua direcção.
O tensor R é um tensor ortogonal e de acordo com a definição e é tal que
IRR =T e ( ) 1det =R . Nestas condições o tensor das deformações de Green, C,
pode ser calculado a partir do tensor das extensões U, do seguinte modo:
[ ] [ ] [ ] UUURRUURURFFC TTTTT ==== (2.40)

Deformações
21
Nestas condições pode concluir-se que o tensor, C, é constituído por quantidades
que permitem o cálculo das variações de comprimento de elementos lineares do sólido e
que não são afectadas por movimentos de corpo rígido, sendo consequentemente o
tensor C independente dos movimentos de corpo rígido.
Exemplo 2.7
Considere o processo de deformação regido pelas relações seguintes entre as
coordenadas na configura inicial e deformada:
1 1 2 2 2 3 3x * x kx ; x * x ; x * x= + = =
e determine
a) O tensor de Green C.
b) O tensor das extensões ou dos alongamentos relativos U e o inverso - 1U .
c) O tensor rotação R.
d) Os valores e vectores próprios do tensor C.
Solução:
a) O tensor gradiente de deformação é:
1 2 00 1 00 0 1
=
F
o tensor de Green C obtém-se a partir do tensor F, considerando a definição, ou seja:
=
==
100052021
100010021
100012001
T FFC
b) O tensor dos alongamentos relativos U, é:
0.7071 0.7071 00.7071 2.1213 0
0 0 1
=
U
O tensor 1−U é:

Deformações
22
1
2.1213 0.7071 00.7071 0.7071 0
0 0 1.0
−
− = −
U
1− =U IU
c) O tensor das rotações é: 1−=R FU , ou seja:
1
1 2 00 1 00 0 1
−
=
F U2.1213 0.7071 00.7071 0.7071 0
0 0 1.0
− − =
0.7071 0.7071 00.7071 0.7071 0
0 0 1
−
d) Os valores próprios de C são obtidos por resolução da equação característica e
são: 0.1716, 5.8284 e 1.0.
Os vectores próprios são:
0.9239 0.3827 00.3827 , 0.9239 , 0
0 0 1
−
Exemplo 2.8
Considere a transformação de corte simples representada pelas equações:
1 1 2 2 2 3 3x * x 2x ; x * x ; x * x= + = =
a) Qual é o alongamento de um elemento linear que na configuração
inicial está na direcção 1e .
b) Qual é o alongamento de um elemento linear que na configuração
inicial está na direcção 2e .
c) Qual é o alongamento de um elemento linear que na configuração
inicial está na direcção 21 ee + .
Solução:
a) O tensor gradiente de deformação F é:
1 2 00 1 00 0 1
=
F

Deformações
23
Um vector na direcção 1e tem componentes { }dL 0 0 e tem componentes na
configuração deformada que são: { }dL* 0 0 . Este vector obtém-se multiplicando o
tensor F pelo vector na configuração inicial.
dL* 1 2 0 dL0 0 1 0 00 0 0 1 0
=
ou seja dL*=dL
Um vector na direcção 1e não sofre alongamento.
Ao mesmo resultado se chegaria no caso de se considerar o tensor E definido do
seguinte modo:
( )12
=E C - I
e de se determinar a variação do quadrado do comprimento do vector inicialmente
segundo 1e :
( ) ( ) { }2 20 1 0 dL
dL* dL 2* dL 0 0 1 2 0 0 00 0 1 0
− = =
Não há portanto variação de comprimento para um vector inicialmente segundo o eixo
de versor 1e .
b) Um vector que tenha a direcção de 2e passa a
2dL 1 2 0 0dL 0 1 0 dL0 0 0 1 0
=
sofrendo uma variação de comprimento ( )5 1 dL− ao que corresponde um
alongamento 5 1− .
Esta conclusão também poderia ser obtida considerando
( ) ( ) { } ( )2 2 20 1 0 0
dL* dL 2* 0 dL 0 1 2 0 dL 4 dL0 0 1 0
− = =
Consequentemente dL* tem um comprimento igual a 5dL .
c) Um vector que tenha a direcção de 1 2e + e passa a

Deformações
24
3dL 1 2 0 dLdL 0 1 0 dL0 0 0 1 0
=
O vector passa a ter o comprimento 10dL sofrendo uma variação de comprimento de
10 2− .
Por outro lado também se sabe que:
( ) ( ) { } ( )2 2 20 1 0 dL
dL* 2 dL 2* dL dL 0 1 2 0 dL 8 dL0 0 1 0
− = =
ou seja:
( ) ( )2 2dL* 10 dL=
Exemplo 2.9
Considere a transformação de corte simples representada pelas equações:
1 1 2 2 2 3 3x * x kx ; x * x ; x * x= + = =
a) Calcule o tensor de Lagrange E.
b) Calcule o comprimento na configuração deformada do segmento OB da
figura.
c) Compare o valor obtido em b) com 22E .
Figura 2.11: Corte simples.
1x
2x
kk
A O
B C C' B'
1.0
1.0

Deformações
25
Solução:
a) O gradiente de deformação F é:
1 k 00 1 00 0 1
=
F
O tensor C é:
T 2
1 k 0k 1+ 0k0 0 1
=
C F =F
O tensor E é:
2
0 k 01E k 0k2
0 0 0
=
b) O vector OB é: { }T0 1 0 , o vector OB´ é:
1 k 0 0 kOB´ 0 1 0 1 1
0 0 1 0 0
= =
a que corresponde o comprimento 21 k+ .
c) O valor de 22E corresponde a 1/2 do quadrado da variação de comprimento
sofrida pelo vector.
2.9 DEFORMAÇÃO DE CORTE
Foram estabelecidos tensores que têm a ver com a extensão ou contracção de um
elemento linear sendo a quantificação da extensão ou contracção feita através de ( )nλ .
Mas outro tipo de deformação deve ser considerada a chamada deformação de corte. A
deformação de corte está associada à mudança de ângulos entre duas linhas durante o
processo de deformação. É possível mostrar que os elementos não diagonais do tensor E
são quantificações associadas à dimensão do referido ângulo.

Deformações
26
Considere-se a correlação entre a configuração inicial e deformada do sólido
representada na figura 2.1. Na configuração inicial considera-se linhas 1L e 2L
ortogonais, cujas tangentes no ponto P, de intercepção das duas linhas, são 1n e 2n . Na
configuração deformada as linhas ( )1φ L e ( )2φ L encontram-se no ponto ( )φ P e as
tangentes são 1nF e 2nF formando entre si um ângulo θ. O coseno do ângulo θ
formado pelas tangentes deformadas 1nF e 2nF são:
( )21
2121 nFnF
nF.nFnFnF =θ ,cos (2.41)
onde F é tensor gradiente da deformação, sendo dx/ds = n e dX/ds = F n como se
mostrou anteriormente.
Figura 2.12: Ângulo de Corte θ.
A equação 2.41 pode ser modificada, tendo em conta a definição do tensor de
Green e que 2T
121 .. nFFnnFnF = , obtendo-se:
( ) ( ) ( )22,cos
nnnC.n
nFnF 2121 λλ
=θ (2.42)
sendo ( ) ( ) 2211 e nFnnFn =λ=λ .
No caso dos vectores iniciais serem ortogonais, a mudança de ângulo entre os dois
vectores pode ser designada por γ e é tal que:
( )2Lφ
( )Pφ
( )Vφ
( )xx φ=∗
( )Sφ
( )xφ
V
x
2x
1x
3x P
S
1n
2n
1L
2L
( )1Lφ
2nF
1nF

Deformações
27
θ−π
=γ2
(2.43)
No processo de deformação de um sólido constata-se que existe uma relação entre
corte e extensão.
2.10 SIGNIFICADO FÍSICO DO TENSOR DE GREEN
O significado físico das componentes do tensor de Green e de Lagrange pode ser
mais facilmente obtido se considerar que a direcção das tangentes à curva ou curvas L
são consideradas coincidentes com as direcções dos eixos de referência às quais
correspondam os vectores base { }321 e, eee . A componente ij do tensor C é:
jiij . eCeC = (2.44)
O quadrado da extensão na direcção de ie é:
( ) iii2
ii . eCeeC =λ= (2.45)
Consequentemente os elementos da diagonal do tensor C representam extensões
na direcção de elementos lineares inicialmente com a direcção dos eixos coordenados.
O coseno do ângulo θ, formado pelos vectores ji e eFeF que correspondiam
aos vectores ji e ee na configuração inicial, é
( ) ( ) ( ) jjii
ij
ji
jiji
.,cos
CC
Cee
eCeeFeF =
λλ=θ (2.46)
donde
( ) ( ) ( )jijiij ,cosC eFeFee λλ= (2.47)
Os elementos não diagonais do tensor e representam uma medida do ângulo de
corte.
No caso do tensor E os elementos da diagonal representam uma medida do
quadrado da extensão por unidade do quadrado do comprimento inicial, mais
exactamente metade ou seja ( )
−λ 121 2
i . Os elementos não diagonais de E têm o
mesmo significado que os elementos não diagonais de C

Deformações
28
Exemplo 2.9 Considere a transformação de corte simples representada pelas equações:
11 1 2 2 2 3 3x * x kx ; x * x k ; x * xx= + = + = .Na configuração deformada qual é o ângulo
formado por dois segmentos lineares que na configuração inicial tinham as direcções
de 1e e 2e .
Solução:
De acordo com a equação 2.46 é:
( ) ( ) ( ) jjii
ij
ji
jiji
.,cos
CC
Cee
eCeeFeF =
λλ=θ
É portanto necessário calcular o tensor C. Este tensor obtém-se a partir do tensor F
que é:
1 k 0k 1 00 0 1
=
F
Consequentemente C é: 2
2
1 2k 0k2k 1 0k0 0 1
+ = +
C
sendo o ângulo pedido igual a:
( )i j 211 22
2kcos ,1 k
θ = =+
12CFe FeC C
2.11 TENSORES DE CAUCHY E EULER
O quadrado da extensão referida à configuração deformada , 1/ ( )λ2 s , sendo s
definido sobre a configuração deformada é de acordo com a expressão 2.15, o quadrado
do comprimento do vector d d sx , o qual pode ser calculado a partir do inverso do
tensor gradiente da deformação F. O vector 1−F n* tem um comprimento que é igual à

Deformações
29
extensão ( ) ( )1λ = λn* n , sendo a extensão uma função do vector tangente n*, o
quadrado da extensão é:
( )2 .λ = -1 -1n* n* n*F F (2.48)
para qualquer vector unitário n da configuração deformada.
Considere-se o produto ( )T. n *-1 -1 -1 -1n* n* = n*F F F F , sendo o produto tensorial
( )T-1 -1F F que aparece na expressão designado por Tensor das Deformações de
Cauchy, C*, ou seja:
( )T* = -1 -1C F F (2.49)
A extensão de um segmento com a orientação n* na configuração deformada é de
acordo com a equação 2.48 e tendo em conta a definição das deformações de Cauchy,
calculado do seguinte modo:
( ) ( )22
1 .= λ =λ
n* n* C*n*n
(2.50)
A deformação de Euler definida por 2.5 em termos da extensão λ, para problemas
uniaxiais, pode ser definida para o caso tridimensional como sendo
( ) ( )2
1 11 .2
= − = λ E* n* n* E*n*
n (2.51)
onde E* é o Tensor das Deformações de Euler definido a partir do tensor das
deformações de Cauchy, com a seguinte forma:
[ ]12
= −E* I C* (2.52)
Os tensores C* e E* são tensores simétricos como resulta da definição do tensor
C*, uma vez que o produto de um tensor pelo transposto do tensor é um tensor
simétrico.
2.12 DEFORMAÇÕES EM TERMOS DOS DESLOCAMENTOS
No caso da função de deformação ( )xφ ser estabelecida em termos dos
deslocamentos, sendo o vector deslocamento do ponto P, designado por ( )xu , como se
representa na figura 2.13, a função ( )xφ é definida do seguinte modo:
( ) ( )φ = +x x u x (2.53)

Deformações
30
Figura 2.13: Deslocamento do ponto P.
O tensor gradiente da deformação F obtém-se a partir de 2.53 determinando
( )xφ∇ o qual é:
uIF ∇+= (2.54)
sendo as componentes do gradiente do vector deslocamentos u∇ definidos do seguinte
modo [ ] jiij uuu ∂∂=∇ .
O tensor gradiente da deformação têm as seguintes componentes em termos dos
deslocamentos
j,iijij uF +δ= (2.55)
O tensor da deformação de Green é calculado a partir da definição como sendo
FFC T= , ou seja:
[ ] [ ] uuuuIC ∇∇∇∇ TT +++= (2.56)
As componentes do tensor C podem ser calculadas a partir das componentes do
tensor u∇ do seguinte modo:
j,ki,ki,jijijij uuuuC +++δ= (2.57)
sendo
jij,i uuu ∂∂=
O tensor de Lagrange é de acordo com a definição:
( )xφ
V
x
2x
1x
3x P
u
( )Vφ
P*
x = φ (x)

Deformações
31
( ) [ ] [ ][ ]uuuuICE ∇∇∇∇ TT21
21
++=−= (2.58)
cujas componentes são
[ ]j,ki,ki,jj,iij uuuu21E ++= (2.59)
note-se que as duas primeiras parcelas representam a parte linear do tensor ou seja
[ ][ ]T21 uu ∇+∇=ε
cujas componentes são:
[ ]i,jj,iij uu21
+=ε (2.60)
e a última parcela representa a parte não linear do tensor. Na teoria da Elasticidade
linear é usual considerar-se o tensor das deformações definido de acordo com a
expressão 2.60.
2.11 DEFORMAÇÕES PRINCIPAIS
No sólido, V e num ponto existem direcções segundo as quais as extensões têm
valores extremos, máximos ou mínimos. Tendo em conta que os quadrados das
extensões são:
( ) nCnn .2 =λ (2.61)
nas direcções do vector unitário n, o cálculo dos valores extremos de ( )n2λ passa pelo
cálculo dos máximos ou mínimos de nC.n sujeito à restrição 1=n.n . Nestas
condições o Lagrangeano (L) de problema de optimização com restrições é:
( ) ( )1..,L −µ−= nnnCnun (2.62)
sendo µ o multiplicador de Lagrange.
A equação a satisfazer para que haja um máximo ou mínimo da função nC.n
obtém-se considerando a derivada 0L =∂∂ n , ou seja
[ ] 0ou =µ−µ= nICnnC (2.63)
O problema que se representa pela equação 2.58 é um problema de valores
próprios, onde n é um vector com uma direcção tal que por aplicação do tensor C
apenas sofre uma alteração de comprimento quantificada por µ. A equação 2.58 tem

Deformações
32
uma solução não trivial quando o determinante da matriz dos coeficientes for nula, ou
seja:
[ ] 0CCC
CCCCCC
detdet
333231
232221
131211=
µ−µ−
=µ−
µ−
IC (2.64)
donde resulta a equação cúbica designada por equação característica e que é:
0III 32213 =+µ−µ+µ− (2.65)
onde
( ) 3322111 CCCCtrI ++==
3223332231133311211222112 CCCCCCCCCCCCI −+−+−=
+−+−== 3321122331122332113322113 CCCCCCCCCCCCCdetI
223113322113 CCCCCC −+
são os invariantes do tensor C, esta designação resulta do facto destas quantidades não
sofrerem alteração quando se muda de um sistema de eixos coordenados para outro.
A resolução da equação cúbica 2.60 pode efectuar-se recorrendo a fórmulas
analíticas como as que se indicam em anexo ou recorrendo a processos iterativos de
cálculo de valores próprios de tensores. Os valores próprios da equação 2.60 podem ser
designados por 321 e, µµµ e são designados por extensões principais. A cada um dos
valores próprios 321 e, µµµ estão associadas direcções as chamadas direcções
principais 321 e, nnn e que são vectores próprios dos sistema de equação 2.58. A
determinação dos vectores unitários 321 e, nnn pode ser feita de várias formas, em
particular pode começar por admitir-se que 1n , por exemplo, tem a forma:
3211 ba1 eeen ++= (2.66)
substituindo no sistema de equações 2.58, obtém-se:
0ba1
CCCCCCCCC
1333231
2312221
1312111=
µ−µ−
µ− (2.67)
Os valores de a e b são desconhecidos e podem ser calculados por resolução das
equações:
−=
µ−
µ−
31
21
13332
23122CC
ba
CCCC
(2.68)

Deformações
33
No caso do vector 1n ser tal que a componentes de 1e tem valor nulo a hipótese
estabelecida pela equação 2.61 não é adequada e o sistema 2.63 manifestar-se-ia como
sendo singular. Nestas condições deveria tentar-se uma das hipóteses
32113211 e1ebeaouebe1ea ++=++= nn (2.69)
e obter os valores de a e b.
Uma vez calculado o vector próprio 1n podia normalizar-se o vector 1n e obter
um vector unitário. De modo análogo se poderiam determinar os vectores 32 e nn .
Os vectores 321 e, nnn são ortogonais entre si no caso de corresponderem a
valores próprios distintos.
Consideram-se dois vectores próprios ji e nn de um tensor simétrico C, aos quais
correspondem dois valores próprios ji e µµ (resultantes da resolução do sistema de
equações C n = µ n). Nestas condições pode dizer-se que:
jjii e nnCnnC µ=µ= (2.70)
Multiplicando escalarmente a primeira equação por jn e a segunda equação por
in , obtém-se:
ijjijiij e n.nnC.nn.nnC.n µ=µ= (2.71)
ou seja
0jiij =− nC.nnC.n
( ) ( ) 0j jiiij =µ−µ n.nn.n
( ) 0jiji =µ−µ n.n (2.72)
Consequentemente:
0ji =n.n
donde se conclui que os vectores ji e nn são ortogonais entre si no caso do tensor C
ser simétrico e dos valores próprios correspondentes serem distintos entre si.
Podem considerar-se dois casos particulares, o caso de ser 321 µ≠µ=µ e o caso
de ser 321 µ=µ=µ . O primeiro caso 321 µ≠µ=µ corresponde à situação de um
vector próprio ter a direcção de 3n e os outros dois vectores próprios existirem no
plano perpendicular a 3n . O segundo caso corresponde a ser µ=µ=µ=µ 321 e

Deformações
34
nestas condições ocorre uma dilatação uniforme do sólido e qualquer vector do espaço
tridimensional é um vector próprio.
2.12 DECOMPOSIÇÃO ESPECTRAL E SIGNIFICADO FÍSICO DOS
VALORES E VECTORES PRÓPRIOS
No caso dos valores próprios e vectores próprios serem conhecidos o tensor C
pode ser calculado a partir dos referidos valores
iii nnC ⊗µ= (2.73)
O cálculo do tensor C pode ser feito a partir da equação 2.68 e esta forma de
expressão do tensor é conhecida por decomposição espectral do tensor C.
Multiplicando ambos os membros da equação 2.68 por jn obtém-se:
( )∑∑==
µ=µ=
⊗µ=
3
1ijjiijiji
3
1iiij .n nnnnnnnC (2.74)
Na base 321 e, nnn , por vezes referida como base canónica, o tensor C é:
µµ
µ=
3
2
1
000000
C (2.75)
sendo os invariantes 321 IeI,I
3211I µ+µ+µ=
3231212I µµ+µµ+µµ= (2.76)
3213I µµµ=
Os valores próprios jµ podem ser definidos do seguinte modo:
( ) ( )j2jjjjjj C.. nnnnn λ==µ=µ (2.77)
atendendo a que 1. jj =nn e as equações 2.56 e 2.58. Nestas condições o valor próprio
jµ de C é igual ao quadrado da extensão na direcção do vector próprio jn . No sistema
de eixos 321 e, nnn é possível demonstrar que não existem deformações de corte ou
seja:

Deformações
35
( ) ( ) ( ) 0..C.
,cos kjj
k
kj
kkj
kj
kjkj =
µ
µ=
µµ
µ=
µµ=θ nn
nnnnnFnF (2.78)
uma vez que 0. kj =nn dada a ortogonalidade de kj e nn .
Os valores e vectores próprios do tensor das deformações de Lagrange podem ser
calculados tendo em conta que o tensor das deformações de Lagrange se relaciona com
o tensor das deformações de Green através da equação [ ]ICE −=21 . Nestas condições
[ ] ( ) iiii 121
21 nnICnE −µ=−= (2.79)
ou seja os valores próprios do tensor E são:
( )121
ii −µ=γ (2.80)
tais que iii nnE γ= .
Nestas condições as direcções principais das extensões de Green coincidem com
as direcções principais das deformações de Lagrange.
2.13 VOLUME E ÁREA
Considere-se o volume na configuração inicial formado pelos vectores
332211 sdesd,sd nnn e o volume formado pelos vectores 2211 sd,sd nFnF e
33 sdnF na configuração deformada como se representa na figura 2.13.
Figura 2.13: Mudança de volume no processo de deformação.
( )Vφ
11 sdnF
22 sdnF
( )xφV
11 sdn
33 sdn
( )xφ
P
2x
1x
3x
2x *
1x *
3x *
22 sdn 33 sdnF

Deformações
36
O volume na configuração inicial é:
( ) 321321 sdsdsd.Vd nnn ×= (2.81)
O volume na configuração deformada:
( ) ( ) 321321 sdsdsd.VdVd nFnFnF ×=φ=∗ (2.82)
ou seja
VddetVd F=∗ (2.83)
tendo em conta que ( ) ( )[ ] ( )[ ]wvuTwTvTuT .xdet.x = e comparando as
equações 2.81 e 2.82.
Considere-se a área elementar Ad , na configuração inicial do sólido e a área
elementar ∗Ad na configuração deformada do sólido, como se representa na figura
2.14.
11 sdn
dAP
( )Pφ
11 sdnF
dA*P
Figura 2.14: Mudança de área.
As áreas elementares na configuração inicial e deformada são:
2121 sdsdAd nn ×= e 2121 sdsdAd nFnF ×=∗ (2.84)
As normais n e N podem se calculadas a partir dos vectores 21 e nn e
21 e nFnF do seguinte modo:
n 22 sdnF
( )xφ
2x
1x
3x
22 sdn
2x *
1x *
3x *
N

Deformações
37
21
21
21
21 NenFnFnFnF
nnnnn
××
=××
= (2.85)
consequentemente:
( ) 2121 sdsdxAd nnn = e ( ) 2121 sdsdxAd nFnFN =∗ (2.86)
É possível relacionar a quantidade ∗AdN com a quantidade Adn , tendo em
conta que:
( ) 2121TT sdsdxAd nFnFFNF =∗ (2.87)
ou seja
( ) AddetAdT nFNF =∗
donde se infere que
( ) AddetAd1T nFFN
−=∗ (2.88)
ou
( ) nFFdetAdAd T−∗ =
Esta transformação é designada por Transformação de Piola.
BIBLIOGRAFIA
[1] - W. Michael Lai, David Rubin and Erhard Krempl. "Introduction to Continuum
Mechanics", Pergamon Press, 1993.
[2] - Y. C. Fung. "Foundations of Solid Mechanics", Prentice Hall, Englewood Cliffs,
N.Y., 1965.








![Lec8[1]Multiplicadores de Lagrange](https://img.document.onl/doc/110x75/577cd5521a28ab9e789a79ff/lec81multiplicadores-de-lagrange.jpg)



















