Embed Size (px)
Citation preview

28/Fev/2018 – Aula 4
5/Mar/2018 – Aula 5
5.1 Movimento circular 5.1.1 Movimento circular uniforme 5.1.2 Velocidade angular 5.1.3 Força e aceleração centrípetas 5.1.4 Aceleração tangencial 5.1.5 Coordenadas radial e tangencial 5.2 Movimento em referenciais acelerados 5.2.1 Força de inércia 5.2.2 Peso aparente 5.2.3 Força centrífuga
4. Aplicações das leis de Newton do movimento 4.1 Força de atrito 4.2 Força de arrastamento Exemplos
1

Aula anterior
2
O chamado atrito cinético surge quando um objeto desliza numa superfície. Esta força opõe-se ao movimento e aponta sempre no sentido contrário ao da velocidade.
O atrito estático f é uma força que tende a manter um objeto em repouso numa superfície e aponta na direção que “impede” o movimento.
F0 = µkNF0 = µkN
Coeficiente de atrito cinético: µk
!f
4.1 Força de atrito

3
Exemplo:
Aula anterior 4.1 Força de atrito

Aula anterior
4
Coeficiente de atrito estático:
mg
F
N
Fa
N mg=
Fa = µN
!a
µs
0 = F − Fa ⇒ Fa = F
Coeficiente de atrito dinâmico: µk
ma = F − Fa = F −µkmg
se F ≤ µsN ⇒ Fa = F ⇒ não há movimento
se F>µsN ⇒ Fa = µkN ⇒ há movimento, na presença de atrito
⎡
⎣
⎢⎢
4.1 Força de atrito

5
A força de arrastamento opõe-se ao movimento de um objeto num líquido ou num gás. Tal como o atrito cinético, manifesta-se no sentido contrário ao do movimento.
Aula anterior 4.2 Força de arrastamento

6
A força de arrastamento depende da forma do objeto, das propriedades mecânicas do fluido e da velocidade do objeto, relativamente ao fluido.
Normalmente, quando a velocidade é pequena, a força de arrastamento é proporcional à velocidade. Quando a velocidade aumenta, torna-se proporcional ao quadrado da velocidade:
Fd = bvn
mg −bvn =ma ⇒ a = g − bmvn
b é uma constante e n é um inteiro.
Se a→ 0 ⇒ vterminal =mgb
⎛
⎝⎜
⎞
⎠⎟1 n
Aula anterior 4.2 Força de arrastamento

bvn =mgbvn <mg
7
A velocidade terminal (velocidade constante) será eventualmente atingida quando a força de arrastamento for igual ao peso do objeto.
Efeito da força de arrastamento na trajetória de um projétil:
Aula anterior
Força de arrastamento Simulação
4.2 Força de arrastamento

8
a) Fx∑ =max
a1x= a2x= a e T’=T :
2.9 2ª e 3ª leis Dois objetos, de massas m1 e m2, estão ligados por um fio inextensível, como é mos-trado na figura. Despreze o atrito entre os objetos e o plano inclinado e determine: a) a aceleração de cada objeto; b) a tensão no fio; c) a relação entre as massas m1 e m2 para que o sistema fique em equilíbrio.
T −m1g sen40° =m1a1x Newton’s Laws
357
Picture the Problem The magnitude of the accelerations of the two blocks are the
same. Choose a coordinate system in which up the incline is the +x direction for
the 8.0-kg object and downward is the +x direction for the 10-kg object. The peg
changes the direction the tension in the rope acts. Draw free-body diagrams for
each object, apply Newton’s second law of motion to both of them, and solve the
resulting equations simultaneously.
n,8F�
n,10F�
gm�
10
gm�
8
T�
'T�
x
x
yy
q40q50
(a) Apply ¦ xx maF to the 8.0-kg
block:
xamgmT88
40sin q� (1)
Noting that T = T c, apply ¦ xx maF
to the 10-kg block:
xamTgm1010
50sin �q (2)
Add equations (1) and (2) to obtain:
� � xammgmgm
810
81040sin50sin
� q�q
Solving for ax yields: � �108
81040sin50sin
mmmmg
ax �q�q
Substitute numerical values and evaluate ax:
� � � � � �� � 22
2
m/s4.1m/s37.1kg 10kg 0.8
40sinkg 0.850sinkg 10m/s 81.9
�q�q
xa
Solving the first of the two force
equations for T yields:
� �xagmT �q 40sin8
Substitute numerical values and evaluate T:
� � � �> @ N61m/s37.140sinm/s81.9kg0.822 �q T
(b) Because the system is in
equilibrium, ax = 0, and equations (1)
and (2) become:
040sin1
q� gmT (3)
and
050sin2
�q Tgm (4)
−T '+m2g sen50° =m2a2x
⇒ a =g m2 sen50°−m1sen40°( )
m1+m2=1,37m/s2
b) T =m1 g sen40°+ a( ) = 61Nc) Equilíbrio
Massa m1: T −m1g sen40° = 0
⇒ Fx∑ = 0
Massa m2: −T '+m2g sen50° = 0Como T’=T : m1 m2 = sen50° sen40° =1,2

9
5.1.1 Movimento circular uniforme
Trajetória circular. O vetor velocidade tem sempre o mesmo módulo, mas a sua direção muda constantemente. Para que o vetor velocidade mude, é necessário que exista uma aceleração.
Posição : !r = constante
Rapidez : !v = constante
O período T é o intervalo de tempo necessário para que a partícula efetue uma rotação completa.
v = 1 circunferência1 período
=2πrT
Movimento curvo Simulação

10
s = r θ ; θ = s/r A posição angular θ (em radianos) da partícula, relativamente ao eixo x, é θ = s/r, em que s é o comprimento do arco definido pela trajetória da partícula, entre o eixo x e a sua posição em cada instante, com 0 ≤ |θ| ≤ 2π.
1° = (π/180°) rad = 0,0174533 rad; 1 rad = 180°/π = 57,296°
5.1.1 Movimento circular uniforme

11
Por convenção, θ é positivo se aumentar no sentido anti-horário. Se ω descrever uma rotação no sentido anti-horário, é positiva.
5.1.2 Velocidade angular
A velocidade angular ω (em radianos/s = rad/s) mede a rapidez com que o ângulo θ varia, ao longo da trajetória da partícula.

12
A força (e a aceleração) apontam para o centro da circunferência
5.1.3 Força e aceleração centrípeta
Para que um objeto se mova com velocidade constante ao longo de uma circunferência, é preciso que exista uma força a agir sobre ele. Se não, mover-se-ia ao longo de uma linha reta.
!amédia =!v2 −!v1
Δt=−2vsenθ2rθ / v
y = − v2
rsenθθ
⎛
⎝⎜
⎞
⎠⎟ y
!a = − v2
rlimθ→0
senθθ
⎛
⎝⎜
⎞
⎠⎟ y = −
v2
ry fc =mac =m
v2
r=mω2r
Movimento circular Simulação

13
A força centrípeta pode ser criada pela tensão numa corda, pela força normal, pelo atrito, etc.
Exemplo: um carro, de massa m = 1200 kg, efetua uma trajetória circular, de raio r = 45 m. Se µk = 0,82, qual é a velocidade máxima que o carro pode ter para não derrapar?
Fx∑ = fk = µkN =mac =mv2
rFy∑ = 0 = N −W = N −mg
µkmg =mvr
2⇒ v = µkrg
v = (0,82)(45,0 m)(9,81 m/s2)=19,0 m/s= 68,4 km/h
5.1.3 Força e aceleração centrípeta

14
Exemplo: se uma curva tiver uma inclinação de ângulo θ, é possível que um carro a descreva sem derrapar e sem que exista atrito. Se a curva tiver um raio r = 85 m e o carro tiver m = 900 kg e se deslocar a 20,5 m/s, qual deve ser o valor de θ para que o carro não derrape?
N senθN cosθ
= tgθ =m v
2
rmg
=v2
grθ = arctg v
2
gr
= arctg (20,5 m/s)2
(9,81 m/s2)(85 m)= 26,7°
Fx∑ = N senθ =mac =mv2
rFy∑ = 0 = N cosθ −W = N cosθ −mg
5.1.3 Força e aceleração centrípeta

15
5.1.4 Aceleração tangencial
Se o módulo da velocidade não for constante, existe uma aceleração no sentido do movimento. Nesse caso, trata-se de uma aceleração tangencial (tangente à trajetória).
A aceleração total será a soma vetorial das duas acelerações.
Centrípeta
Tangencial Tangencial
!v4!v1 Componentes
centrípeta e tangencial
vt =2πrT
Velocidade tangencial:

16
5.1.5 Coordenadas radial e tangencial
O eixo r (radial) é definido do centro de rotação para a posição da partícula. O eixo t (tangencial) é a tangente à circunferência, no sentido anti-horário. O eixo z (axial) é a a perpendicular ao plano de rotação.
O vetor !A pode ser escrito nas
componentes radial e tangencial: Ar = Acosφ; At = AsenφComponentes
radial e tangencial animação

5.2.1 Força de inércia
17
m
!aM
!Fi =ma
Num referencial acelerado, a 2ª lei de Newton não é válida.
Neste exemplo, o bloco de massa M adquire uma aceleração a para a direita, devido à força F. Como os blocos estão em contacto, o bloco de massa m sofre uma força de inércia Fi, para a esquerda.
!Fi =ma
A força de inércia que m sofre é igual ao produto da sua massa pela aceleração do referencial acelerado. Tem sempre o sentido contrário ao do movimento do referencial, como num par ação-reação.

5.2.2 Peso aparente
18
Dentro do elevador, de massa M, há um peixe de massa m.
• Quando o elevador se deslocar com velocidade constante, o peixe tem peso mg e não sofre força de inércia.
• Quando o elevador subir, com aceleração a, o peixe tem peso mg e sofre uma força de inércia Fi = ma. A força lida na balança é F = mg + ma.
• Quando o elevador descer, com aceleração a, o peixe tem peso mg e sofre uma força de inércia Fi = ma. A força lida na balança é F = mg - ma.
!Fi =ma

5.2.3 Força centrífuga
19
No referencial do passageiro (figura b), uma força aparente empurra-o para a porta do automóvel. No referencial da Terra (figura c), o carro exerce uma força sobre o passageiro, para a esquerda, para que este acompanhe o movimento do carro. A força dirigida para a direita é uma força fictícia, a que se dá o nome de força centrífuga, e é devida à aceleração centrípeta associada à mudança de direção do carro. Na prática, as forças de atrito são suficientes para que o passageiro se mova solidariamente com o carro.
20
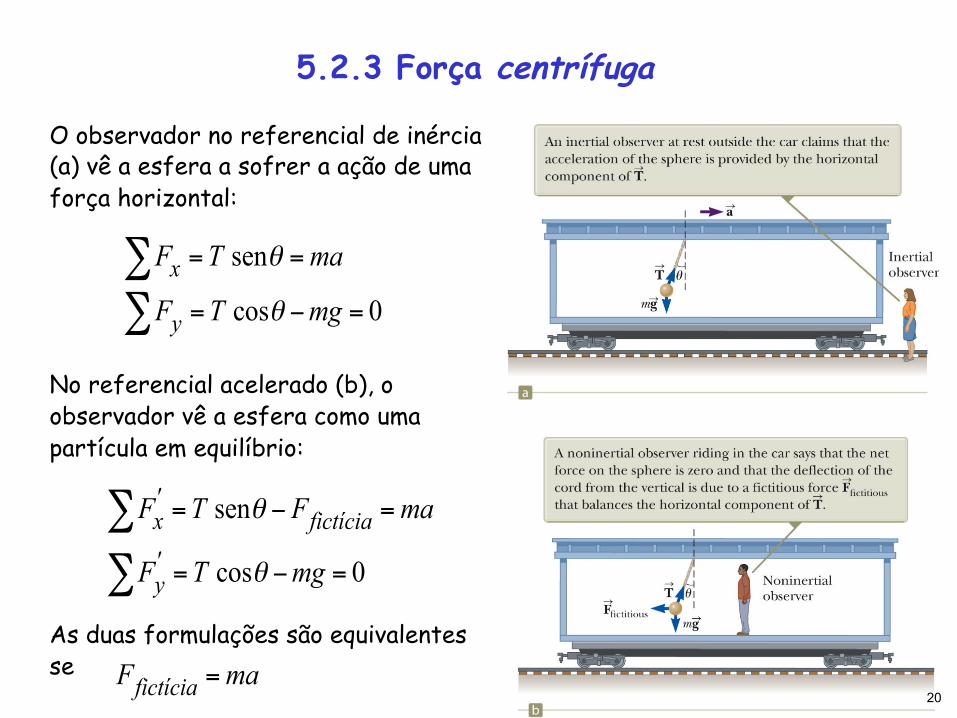
5.2.3 Força centrífuga
O observador no referencial de inércia (a) vê a esfera a sofrer a ação de uma força horizontal: No referencial acelerado (b), o observador vê a esfera como uma partícula em equilíbrio: As duas formulações são equivalentes se
Fx∑ =T senθ =ma
Fy∑ =T cosθ −mg = 0
Fx'∑ =T senθ − Ffictícia =ma
Fy'∑ =T cosθ −mg = 0
Ffictícia =ma





























