Embed Size (px)
Citation preview

ANÁLISE COMPARATIVA DE TÉCNICAS DE PROJETO DE UM REATOR ELETRÔNICO AUTO-
OSCILANTE
PAULO REGINATTO, ÁLYSSON R. SEIDEL, MARCELO F. DA SILVA
Grupo de Pesquisa e Desenvolvimento em Sistemas Elétricos e Computacionais (GSEC) , Colégio Técnico
Industrial de Santa Maria (CTISM), Universidade Ferderal de Santa Maria (UFSM)
Av. Roraima, 1000 – Prédio 5 – Bairro Camobi, Santa Maria, Rio Grande do Sul, CEP: 97105-900, Brasil
Emails: [email protected], [email protected], [email protected]
Abstract The present work deals with the development, analysis and project of self-oscillating ballast for fluorescent lamps with emphasis in the techniques of analysis considering the nonlinear behavior of the used circuit. It is conducted a theoretical approach about project of the resonant filter and modeling of the self-oscillating circuit, beyond the techniques of analysis Tsypkin Locus, Hammel Locus, descriptive function and the extended stability criterion Nyquist, which are the nonlinear system analysis techniques where it will
be determined the components of the circuit from the analysis of stability. A comparative analysis using the three methods will be made. Experimental results of a prototype will be obtained in order to observe the electronic ballast behavior. Results of simulation using the ORCAD software will be used for analysis of the results obtained through each method.
Keywords Self-oscillating, Nonlinear system, Hammel Locus, Tsypkin Locus, Descriptive function.
Resumo O presente trabalho trata do desenvolvimento, análise e projeto de um reator auto-oscilante para lâmpadas fluorescentes com ênfase nas técnicas de análise considerando o comportamento não linear do circuito empregado. É realizada uma abordagem teórica de projeto do filtro ressonante e modelagem do circuito auto-oscilante, além de técnicas de análise Tsypkin Locus, Hammel Locus, função descritiva e o critério de estabilidade estendido de Nyquist, as quais são as técnicas de análise de sistemas não
lineares em que se determinará os componentes do circuito a partir da análise de estabilidade do circuito. Uma análise comparativa empregando os três métodos será realizada. Resultados experimentais de um protótipo serão obtidos a fim de observar o compor-tamento do reator eletrônico. Resultados de simulação utilizando o software ORCAD são empregados para fins de análise dos resultados obtidos através de cada método.
Palavras-chave Auto-oscilante, Sistema não linear, Hammel Locus, Tsypkin Locus, Função descritiva.
1 Introdução
Com o avanço da tecnologia e a necessidade cada
vez maior da eficiência energética, temos diversas
pesquisas na área de reatores eletrônicos e iluminação
fluorescente, que permitiram o desenvolvimento tec-
nológico desse conjunto, toranando-os mais compac-
tos, estáveis e com melhor índice de fator de potência.
Com o tempo foram sendo desenvolvidos circuitos in-
tegrados dedicados com o objetivo de manter o alto
rendimento e atender as especificações das normas de
regulamentação do setor de iluminação.
Em contrapartida a esses circuitos integrados vêm
os reatores eletrônicos baseados no circuito de co-
mando auto-oscilante, que têm se mostrado robustos e
de grande competitividade no mercado de iluminação
com lâmpadas fluorescentes . Esses reatores possuem
os interruptores do inversor comandados a partir da
corrente do filtro ressonante que é transferida ao cir-
cuito de comando através de um transformador de cor-
rente [1].
O projeto do circuito de comando não pode ser re-
alizado usando analise de circuitos lineares de forma
direta. O comportamento do circuito que emprega o
circuito de comando auto oscilante demanda uma aná-
lise para circuitos não lineares, pois existe uma des-
continuidade na comutação dos interruptores do inver-
sor, além do circuito apresentar uma realimentação[7].
Vários trabalhos distintos sobre a análise do com-
portamento e determinação de um projeto vem sendo
realizados, destacando três métodos distintos de pro-
jetos [2-5] . Em [6] apresentou-se uma análise compa-
rativa dos três métodos, porém, tal análise ficou limi-
tada a uma condição de projeto, com simplificações, e
resultados obtidos sem maiores detalhes da compara-
ção de cada método. Além disso, não houve variação
de parâmetros para validar as análises realizadas ,
como por exemplo, diferentes tipos de filtro, tensão de
alimentação e potência da lâmpada.
Portanto, esse trabalho consiste em analisar os mé-
todos de projetos conhecidos na literatura aplicados ao
reator eletrônico auto-oscilante, comparando-os de
forma crítica sua complexidade e sua eficácia.
O artigo é organizado da seguinte forma: Na seção
2 é descrito o funcionamento do reator eletrônico
auto-oscilante (REAO) e a descrição de seu compor-
tamento não linear. Na seção 3 são descritos os méto-
dos empregados no projeto do REAO. Na seção 4 é
mostrado um exemplo de projeto do filtro ressonante.
Na seção 5 são apresentadas as considerações do es-
tudo comparativo.
A lâmpada fluorescente empregada será uma lâm-
pada tubular T5 de 28 watts, apenas com o objetivo de
se exemplificar, já que os métodos de análise podem
ser aplicados a qualquer lâmpada que tenha seu reator
baseado em um circuito auto-oscilante.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3067
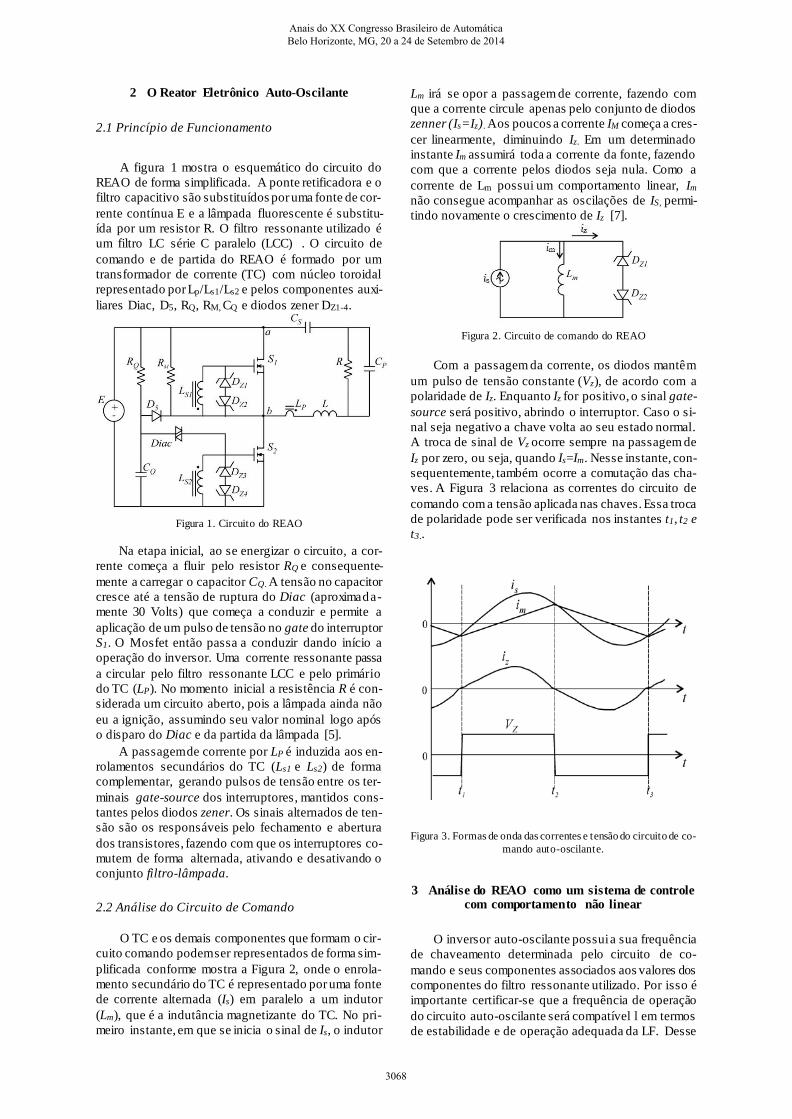
2 O Reator Eletrônico Auto-Oscilante
2.1 Princípio de Funcionamento
A figura 1 mostra o esquemático do circuito do
REAO de forma simplificada. A ponte retificadora e o
filtro capacitivo são substituídos por uma fonte de cor-
rente contínua E e a lâmpada fluorescente é substitu-
ída por um resistor R. O filtro ressonante utilizado é
um filtro LC série C paralelo (LCC) . O circuito de
comando e de partida do REAO é formado por um
transformador de corrente (TC) com núcleo toroidal
representado por Lp/Ls1/Ls2 e pelos componentes auxi-
liares Diac, D5, RQ, RM, CQ e diodos zener DZ1-4.
Figura 1. Circuito do REAO
Na etapa inicial, ao se energizar o circuito, a cor-
rente começa a fluir pelo resistor RQ e consequente-
mente a carregar o capacitor CQ. A tensão no capacitor
cresce até a tensão de ruptura do Diac (aproximada-
mente 30 Volts) que começa a conduzir e permite a
aplicação de um pulso de tensão no gate do interruptor
S1. O Mosfet então passa a conduzir dando início a
operação do inversor. Uma corrente ressonante passa
a circular pelo filtro ressonante LCC e pelo primário
do TC (LP). No momento inicial a resistência R é con-
siderada um circuito aberto, pois a lâmpada ainda não
eu a ignição, assumindo seu valor nominal logo após
o disparo do Diac e da partida da lâmpada [5].
A passagem de corrente por LP é induzida aos en-
rolamentos secundários do TC (Ls1 e Ls2) de forma
complementar, gerando pulsos de tensão entre os ter-
minais gate-source dos interruptores, mantidos cons-
tantes pelos diodos zener. Os sinais alternados de ten-
são são os responsáveis pelo fechamento e abertura
dos transistores, fazendo com que os interruptores co-
mutem de forma alternada, ativando e desativando o
conjunto filtro-lâmpada.
2.2 Análise do Circuito de Comando
O TC e os demais componentes que formam o cir-
cuito comando podem ser representados de forma sim-
plificada conforme mostra a Figura 2, onde o enrola-
mento secundário do TC é representado por uma fonte
de corrente alternada (Is) em paralelo a um indutor
(Lm), que é a indutância magnetizante do TC. No pri-
meiro instante, em que se inicia o sinal de Is, o indutor
Lm irá se opor a passagem de corrente, fazendo com
que a corrente circule apenas pelo conjunto de diodos
zenner (Is=Iz). Aos poucos a corrente IM começa a cres-
cer linearmente, diminuindo Iz. Em um determinado
instante Im assumirá toda a corrente da fonte, fazendo
com que a corrente pelos diodos seja nula. Como a
corrente de Lm possui um comportamento linear, Im
não consegue acompanhar as oscilações de IS, permi-
tindo novamente o crescimento de Iz [7].
Figura 2. Circuito de comando do REAO
Com a passagem da corrente, os diodos mantêm
um pulso de tensão constante (Vz), de acordo com a
polaridade de Iz. Enquanto Iz for positivo, o sinal gate-
source será positivo, abrindo o interruptor. Caso o si-
nal seja negativo a chave volta ao seu estado normal.
A troca de sinal de Vz ocorre sempre na passagem de
Iz por zero, ou seja, quando Is=Im. Nesse instante, con-
sequentemente, também ocorre a comutação das cha-
ves. A Figura 3 relaciona as correntes do circuito de
comando com a tensão aplicada nas chaves. Essa troca
de polaridade pode ser verificada nos instantes t1, t2 e
t3..
Figura 3. Formas de onda das correntes e tensão do circuito de co-
mando auto-oscilante.
3 Análise do REAO como um sistema de controle com comportamento não linear
O inversor auto-oscilante possui a sua frequência
de chaveamento determinada pelo circuito de co-
mando e seus componentes associados aos valores dos
componentes do filtro ressonante utilizado. Por isso é
importante certificar-se que a frequência de operação
do circuito auto-oscilante será compatível l em termos
de estabilidade e de operação adequada da LF. Desse
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3068
modo, a análise do circuito a partir de um sistema de
controle com comportamento não-linear é necessário,
a fim de verificar se os componentes dos circuitos de-
terminados permitem a ocorrência de auto-oscilação,
e que corresponde a um ciclo limite.
Os métodos abordados, que revelam a existência
de um ciclo limite, são “Tsypkin Locus”, no domínio
da frequência, “Hamel Locus” no domínio do tempo,
e o método da função descritiva e o critério de estabi-
lidade estendido de Nyquist associados.
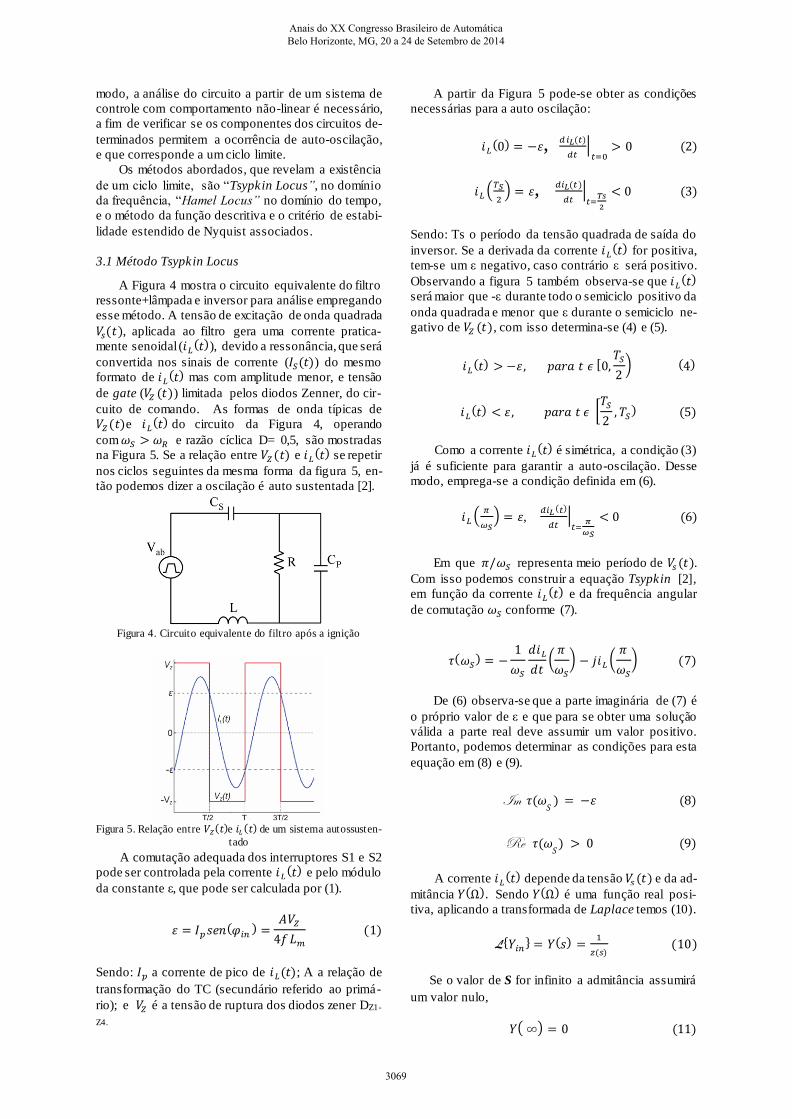
3.1 Método Tsypkin Locus
A Figura 4 mostra o circuito equivalente do filtro
ressonte+lâmpada e inversor para análise empregando
esse método. A tensão de excitação de onda quadrada
𝑉𝑠(𝑡), aplicada ao filtro gera uma corrente pratica-
mente senoidal (𝑖𝐿(𝑡)), devido a ressonância, que será
convertida nos sinais de corrente (𝐼𝑆(𝑡)) do mesmo
formato de 𝑖𝐿(𝑡) mas com amplitude menor, e tensão
de gate (𝑉𝑍 (𝑡)) limitada pelos diodos Zenner, do cir-
cuito de comando. As formas de onda típicas de
𝑉𝑍 (𝑡)e 𝑖𝐿(𝑡) do circuito da Figura 4, operando
com 𝜔𝑆 > 𝜔𝑅 e razão cíclica D= 0,5, são mostradas
na Figura 5. Se a relação entre 𝑉𝑍 (𝑡) e 𝑖𝐿(𝑡) se repetir
nos ciclos seguintes da mesma forma da figura 5, en-
tão podemos dizer a oscilação é auto sustentada [2].
Figura 4. Circuito equivalente do filtro após a ignição
Figura 5. Relação entre 𝑉𝑍(𝑡)e 𝑖𝐿 (𝑡) de um sistema autossusten-
tado
A comutação adequada dos interruptores S1 e S2
pode ser controlada pela corrente 𝑖𝐿(𝑡) e pelo módulo
da constante ε, que pode ser calculada por (1).
𝜀 = 𝐼𝑝 𝑠𝑒𝑛(𝜑𝑖𝑛) =
𝐴𝑉𝑍
4𝑓 𝐿𝑚
(1)
Sendo: 𝐼𝑝 a corrente de pico de 𝑖𝐿(𝑡); A a relação de
transformação do TC (secundário referido ao primá-
rio); e 𝑉𝑍 é a tensão de ruptura dos diodos zener DZ1-
Z4.
A partir da Figura 5 pode-se obter as condições
necessárias para a auto oscilação:
𝑖𝐿(0) = −𝜀, 𝑑 𝑖𝐿(𝑡)
𝑑𝑡|
𝑡=0> 0 (2)
𝑖𝐿 (𝑇𝑆
2) = 𝜀, 𝑑𝑖𝐿(𝑡 )
𝑑𝑡|
𝑡=𝑇𝑠
2
< 0 (3)
Sendo: Ts o período da tensão quadrada de saída do
inversor. Se a derivada da corrente 𝑖𝐿(𝑡) for positiva,
tem-se um ε negativo, caso contrário ε será positivo.
Observando a figura 5 também observa-se que 𝑖𝐿(𝑡)
será maior que -ε durante todo o semiciclo positivo da
onda quadrada e menor que ε durante o semiciclo ne-
gativo de 𝑉𝑍 (𝑡), com isso determina-se (4) e (5).
𝑖𝐿(𝑡) > −𝜀, 𝑝𝑎𝑟𝑎 𝑡 𝜖 [0,
𝑇𝑆
2) (4)
𝑖𝐿(𝑡) < 𝜀, 𝑝𝑎𝑟𝑎 𝑡 𝜖 [
𝑇𝑆
2, 𝑇𝑆
) (5)
Como a corrente 𝑖𝐿(𝑡) é simétrica, a condição (3)
já é suficiente para garantir a auto-oscilação. Desse
modo, emprega-se a condição definida em (6).
𝑖𝐿 (𝜋
𝜔𝑆) = 𝜀,
𝑑𝑖𝐿 (𝑡)
𝑑𝑡|
𝑡=𝜋
𝜔𝑆
< 0 (6)
Em que 𝜋/𝜔𝑆 representa meio período de 𝑉𝑠 (𝑡).
Com isso podemos construir a equação Tsypkin [2],
em função da corrente 𝑖𝐿(𝑡) e da frequência angular
de comutação 𝜔𝑆 conforme (7).
𝜏(𝜔𝑆) = −
1
𝜔𝑆
𝑑𝑖𝐿
𝑑𝑡(
𝜋
𝜔𝑆
) − 𝑗𝑖𝐿 (𝜋
𝜔𝑆
) (7)
De (6) observa-se que a parte imaginária de (7) é
o próprio valor de ε e que para se obter uma solução
válida a parte real deve assumir um valor positivo.
Portanto, podemos determinar as condições para esta
equação em (8) e (9).
Im 𝜏(𝜔𝑆
) = −𝜀 (8)
Re 𝜏(𝜔𝑆
) > 0 (9)
A corrente 𝑖𝐿(𝑡) depende da tensão 𝑉𝑠 (𝑡) e da ad-
mitância 𝑌(Ω). Sendo 𝑌(Ω) é uma função real posi-
tiva, aplicando a transformada de Laplace temos (10).
L{𝑌𝑖𝑛} = 𝑌(𝑠) =
1
𝑧(𝑠) (10)
Se o valor de S for infinito a admitância assumirá
um valor nulo,
𝑌( ∞) = 0 (11)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3069

mas com S tendendo ao infinito o limite de 𝑌(𝑠) será
lim𝑆 →∞
𝑆 (𝑌(𝑆)) = 1
𝐿 (12)
Com isso, temos que a corrente 𝑖𝐿(𝑡) é
𝑖𝐿 (𝜋
𝜔) = −
4 𝐸
𝜋∑ 𝐼𝑚 [
𝑌(𝑗𝜔(2𝑘 − 1))
2𝑘 − 1]
∞
𝑘=1
(13)
𝑖𝐿 (𝜋
𝜔) = −
4 𝐸
𝜋𝜔 ∑ 𝑅𝑒 [𝑌(𝑗𝜔(2𝑘 − 1)) +
𝐸
𝐿] (14)
∞
𝑘=1
Substituindo (12) e (13) em (7), temos que a fun-
ção Tsypkin é
𝜏(𝜔) =4𝐸
𝜋{∑ 𝑅𝑒 [𝑌(𝑗𝜔(2𝑘 − 1))] (15)
∞
𝑘=1
+ 𝑗𝐼𝑚 [𝑌(𝑗𝜔(2𝑘 − 1))
2𝑘 − 1]} −
𝐸
𝜔𝐿
A função Tsypkin é uma série infinita, cuja con-
vergência é determinada por 𝑌(𝑗𝜔). Muitas vezes o
sistema converge rapidamente, sendo que podemos
aproximar o resultado pela soma de finitos de termos
para encontrar a frequência de ressonância. No caso
do circuito da figura 4, o valor de 𝑌(𝑗𝜔(2𝑘 − 1)) cai
rapidamente para 1
2𝑘−1, onde uma soma de poucos ter-
mos pode nos dar uma resposta bastante aproximada
[2].
Para se determinar as possíveis frequências de
operação do circuito, traça-se o gráfico da função (15)
em um plano Re xIm. Os possíveis valores de 𝜔𝑆 são
obtidos graficamente obedecendo-se as restrições de-
terminadas em (8) e (9). Na figura 6 é mostrado um
gráfico típico da função Tsypkin, onde 𝜀 assume os
valores do eixo imaginário.
Onde: 𝛺 =𝜔𝑆
𝜔𝑅 (16)
Figura 6 – Formato típico da função Tsypkin e região dos possí-
veis valores de 𝜔𝑆.
3.2 Método Hammel Locus
O método de Hammel envolve uma análise no
domínio do tempo de IL(t), que é o resultado da tensão
vs(t) aplicada ao filtro de admitância 𝑌(𝑆). Para garan-
tir a estabilidade do circuito, as condições descritas em
(4), (5) e (6) serão empregadas como referência.
3.2.2 Análise no domínio do tempo
A tensão de saída das chaves é uma onda quadrada,
portanto podemos expressá-la como uma série de fun-
ções degrau u(t) infinita
𝑉𝑠(𝑡) = 𝐸 {𝑢(𝑡) ∑(−1)𝑘
∞
𝑘=1
[𝑢 (𝑡 +𝑗𝑇
2)
− 𝑢 (𝑡 +(𝑗 − 1)𝑇
2)]} (17)
Aplicando a transformada inversa de Laplace em
𝑌(𝑆), temos
𝑞(𝑡) = 𝐿−1 {𝑌(𝑠)
𝑠} = 𝐴0 + ∑
𝐴𝑖
𝑝𝑖𝑒𝑝𝑖𝑡 (18)
∞
𝑘=1
Com isso, considerando o intervalo de tempo [0, 𝑇/2], a corrente do filtro fica sendo
𝑖𝐿(𝑡) = 𝐸 {𝑞(𝑡) + ∑(−1)𝑗
∞
𝑗=1
[∑𝐴𝑖
𝑝𝑖𝑒
𝑝𝑖(𝑡 +(𝑘𝑇2
))∞
𝑖 =1
− 𝑒−𝑝𝑖(
𝑇2
)]} (19)
Trocando a ordem dos somatórios e resolvendo a
série de 𝑗 temos
𝑖𝐿(𝑡) = 𝐸 {𝑞(𝑡) − ∑
𝐴𝑖
𝑝𝑖
𝑛
𝑖 =1
𝑒𝑝𝑖 𝑡 tanh (𝑝𝑖 𝑇
4)} (20)
Derivando a corrente do filtro, mostrada em (20),
no tempo, temos:
𝑑𝑖𝐿
𝑑𝑡(𝑡) = 𝐸 {𝑙(𝑡) − ∑
𝐴𝑖
𝑝𝑖
𝑛
𝑖=1
tanh (𝑝𝑖𝑇
4)} (21)
Com 𝑙(𝑡) =L-1{ 𝑌𝑖𝑛(𝑠)}. No instante inicial, ou
seja𝑡 = 0, temos que a corrente do taque ressonante é
𝑖𝐿(0) = 𝐸 {𝑞(0) − ∑
𝐴𝑖
𝑝𝑖
𝑛
𝑖=1
tanh (𝑝𝑖𝑇
4)} (22)
e sua derivada fica sendo
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3070

𝑑𝑖𝐿
𝑑𝑡(0) = 𝐸 {𝑙(0) − ∑ 𝐴𝑖
n
𝑖=1
tanh (𝑝𝑖𝑇
4)} (23)
Agora, considerando o tempo de meio ciclo (𝑇/2),
ou seja, o momento em que ocorre a troca de estado
das chaves, temos a corrente 𝑖𝐿 e a sua derivada pos-
suem a mesma forma, mas com sinais opostos ao ins-
tante inicial [6], sendo expressas como
𝑖𝐿 (𝑇
2) = 𝐸 {−𝑞(0) + ∑
𝐴𝑖
𝑝𝑖
n
𝑖=1
tanh (𝑝𝑖𝑇
4)} (24)
Com isso podemos definir que o limite das equa-
ções inversas de Laplace tendendo ao infinito, no ins-
tante 𝑡 = 0 é
𝑞(0) = lim𝑆→∞
𝑌𝑖𝑛(𝑠) 𝑙(0) = lim
𝑆→∞𝑆𝑌𝑖𝑛
(𝑠) (25)
A partir disso podemos construir a função Hammel
Lócus como sendo a própria equação da corrente no
filtro em função da frequência de operação. A função
Hammel fica sendo
𝐻(𝑓) = 𝑖𝐿 (1
2𝑓)
= 𝐸 {−𝑞(0) + ∑𝐴𝑖
𝑝𝑖
𝑛
𝑖=1
tanh (𝑝𝑖
4𝑓)} (26)
e sua derivada é
𝐻′(𝑓) =𝑑𝑖𝐿
𝑑𝑡(
1
2𝑓)
= 𝐸 {−𝑙(0) + ∑ 𝐴𝑖
𝑛
𝑖=1
tanh (𝑝𝑖
4𝑓)} (27)
Com 𝑞(0) = 0 e 𝑙(0) = 1/𝐿 , expandindo em fra-
ções parciais, temos
𝜀 = 𝐻(𝑓) = 𝐸 {𝐴1
𝑝1
tanh (𝑝1
4𝑓) +
𝐴2
𝑝2
tanh (𝑝2
4𝑓)
+𝐴3
𝑝3
tanh (𝑝3
4𝑓)} (28)
e
𝐻′(𝑓) = 𝐸 {−1
𝐿+ 𝐴1 tanh (
𝑝1
4𝑓) + 𝐴2 tanh (
𝑝2
4𝑓)
+ 𝐴3 tanh (𝑝3
4𝑓)} (29)
Traçando-se um plano com a função 𝐻′(𝑓) no eixo
das abscissas e 𝐻(𝑓) no eixo das ordenadas, podemos
encontrar os possíveis pontos de auto-oscilação, defi-
nidos por 𝐻(𝑓)na região onde 𝐻′(𝑓) < 0.
3.2.3 Análise da freqüência de operação
Aplicando o valor da freqüência de operação pré-
determinada em (28), podemos então saber o valor de
ε. Deve-se então analisar se a reta da constante ε corta
a curva de Hammel na região onde 𝐻′(𝑓) é negativa.
Caso isso ocorra, pode-se dize que há a ocorrência de
um ciclo limite.
Outra maneira de se determinar os possíveis ciclos
ser feita considerando-se ε variável em função de uma
frequência 𝑓, de acordo com (1). Traçando-se os grá-
ficos de (1) e (28) no mesmo plano, as possíveis fre-
quências de operação serão dadas pela intersecção das
duas curvas [5]. A figura 7 mostra um exemplo com
as possíveis frequências de operação.
Figura 7 – Formato típico da função Hammel e ε(f) com as possí-veis frequências de operação.
A curva em vermelho mostra a função Hammel e
em azul temos a função ε(𝑓) para diversos valores de
𝑓. Os pontos onde as duas curvas se interceptam re-
presentam as três possíveis frequências de operação
do circuito.
3.3 Método da Função Descritiva e Critério de Esta-
bilidade Estendido de Nyquist
O método da função descritiva é um método no
domínio da frequência e baseia-se em determinar a
existência de ciclos limites que mantenham a auto-os-
cilação a partir do projeto do circuito tendo como base
expressões derivadas da análise de estabilidade. Essa
técnica pode ser empregada devido ao comportamento
do filtro ressonante LCC utilizado, que apresenta ca-
racterísticas passa-baixa e também atenua as harmôni-
cas de ordem superior à da componente fundamental.
Podemos representar a função de transferência
G(s) do circuito, pela expressão:
𝐺(𝑠) = 𝐺𝑀(𝑠) − 𝐾 × 𝐺𝐹
(𝑠) × 𝑛 (30)
Onde a função 𝐺𝐹(𝑆) pode ser calculada por
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3071

𝐺𝐹(𝑠) =1
𝐿
𝑠 2 +1
𝑅𝐶𝑝𝑠
𝑠 3 +1
𝑅𝐶𝑝𝑠 2 + (
1𝐿𝐶𝑝
+1
𝐿𝐶𝑆)𝑠 +
1𝐿𝐶𝑝𝐶𝑆𝑅
(31)
E 𝐺𝑀(𝑠) dada por
𝐺𝑀(𝑠) =
1
𝐿𝑚 𝑠 (32)
a constante K fica sendo
𝐾 =𝐸
2𝑉𝑍
(33)
a relação de espiras 𝑛 é
𝑛 =𝑛𝑝
𝑛𝑠
(34)
e a indutância de magnetização referida ao secun-
dário é calculada por
𝐿𝑚
= −𝐿
2𝐾𝑛
((1
𝐿 𝐶𝑝𝐶𝑆 𝑅−
1𝑅𝐶𝑝
𝜔2)2
+ ((1
𝐿𝐶𝑝+
1𝐿𝐶𝑆
) 𝜔 − 𝜔3)
2
)
[1
𝑅 𝐶𝑝𝜔2 (
1𝑅𝐶𝑝
𝜔2 −1
𝐿𝐶𝑝𝐶𝑆 𝑅) + 𝜔3 ((
1𝐿𝐶𝑝
+1
𝐿𝐶𝑆) − 𝜔3)]
( 35)
Essa expressão é obtida a partir da condição im-
posta em que G(s), que representa os elementos linea-
res do circuito e que essa expressão corta a função des-
critiva e assim Im(G(s))= 0. As figuras 22 e 23 ilus-
tram bem essa condição.
A função 𝐺(𝑠) representa todos os elementos line-
ares do sistema. Com isso podemos resumir o dia-
grama da figura 4 utilizando essa função, como mostra
a figura 8.
Figura 8 – (a) Diagrama com a chave ideal; (b) Diagrama com a função de transferência da chave ideal.
O bloco N(IZ) representa a função descritiva da
parte não linear do circuito, que ocorre na comutação
das chaves, relacionando a tensão aplicada ao gate das
chaves com a corrente nos diodos [8]. Essa função é
representada por
𝑁(𝐼𝑍 ) =4𝑉𝑍
𝜋𝐼𝑍
(36)
A partir da figura 7, assumindo-se que a corrente
𝐼𝑍 e a frequência de operação 𝜔𝑆 compõe uma auto-
oscilação sustentada, podemos fazer as seguintes con-
siderações
𝑉𝑍 = 𝑁(𝐼𝑍) × (−𝐼𝑍
) (37)
𝐼𝑍 = 𝐺(𝑠) × 𝑉𝑍 (38)
Substituindo (38) em (37) e isolando 𝐺(𝑆), assu-
mindo 𝐼𝑍 diferente de zero e pertencente aos reais, te-
mos equação característica do circuito
𝐺(𝑠) =−1
𝑁 (𝐼𝑍)
(39)
A solução dessa equação define a existência ou
não dos ciclos limites. Para resolvê-la utiliza-se um
gráfico polar, plotando 𝐺(𝑠) e 𝑁(𝐼𝑍) no plano com-
plexo e encontrando os pontos onde ocorre as inter-
secções das duas curvas [5].
Com 𝑆 = 𝑗𝜔, pode-se construir a função de res-
posta 𝐺(𝑗𝜔) variando-se 𝜔 e a função descritiva in-
versa −1
𝑁 (𝐼𝑍) variando-se a corrente de zenner, a esse
gráfico atribui-se o nome de diagrama de Nyquist. Se
as duas curvas se interceptarem, então existe um ciclo
limite, e os valores de 𝐼𝑍 e 𝜔 correspondentes ao
ponto de intersecção são soluções de (39). O número
de ciclos limites possíveis é determinado pelo número
de vezes que as curvas se encontram [7].
Os possíveis ciclos limites encontrados podem ser
estáveis ou instáveis, sendo que apenas no primeiro
caso é que a oscilação será autossustentada. Para um
ciclo limite ser estável deverá se observar se a função
𝐺(𝑗𝜔) corta o eixo −1
𝑁 (𝐼𝑍) no sentido horário, caso con-
trário ocorrerá uma instabilidade e a auto-oscilação
não se manterá. A precisão do cálculo dependerá da
forma que as curvas se cruzam, sendo que quanto mais
perpendicular for a forma que elas se interceptam me-
nor será o erro [7].
Figura 9 – Diagrama de Nyquist.
A figura 9 mostra um exemplo onde 𝐺(𝑗𝜔) corta −1
𝑁(𝐼𝑍 ) apenas uma vez, indicando um possível ciclo li-
mite. Como a curva passa pelo eixo em sentido horário
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3072
pode-se dizer que os valores de 𝐼𝑍 e 𝜔 mantêm a auto-
oscilação.
4. Exemplo de Projeto do Filtro Ressonante
A fim de estabelecer-se uma análise comparativa
entre os métodos de projetos que serão analisados, fo-
ram dimensionados cinco exemplos de projeto, com
diferentes valores de 𝐶𝑆 , a fim de se obter filtros res-
sonantes com valores de componentes variados, que
servirão de parâmetro para as comparações dos méto-
dos de análise.
Os parâmetros elétricos de projeto pré-determina-
dos são:
Tensão de entrada: E= 311 Volts;
Freqüência de operação: 𝑓𝑆 = 35 kHz;
Os valores dos componentes dos filtros
projetados são mostrados na tabela 1.
Filtro 1 Filtro 2 Filtro 3 Filtro 4 Filtro 5
CS1= 4,7
nF
CS2= 10 nF
CS3= 47 nF
CS4= 150 nF
CS5= 470 nF
L1= 8,1 mH
L2= 5,7 mH
L3= 4,1 mH
L4= 3,85 mH
L5= 3,75 mH
Q1= 0,724
Q2= 0,938
Q3= 1,107
Q4= 1,149
Q5= 1,164
Tabela 1 – Parâmetros para cinco filtros ressonantes.
O valor de Cp foi mantido fixo em 3,56 nF para o
dimensionamento dos demais componentes do filtro.
5. Resultados das simulações dos métodos e aná-
lise
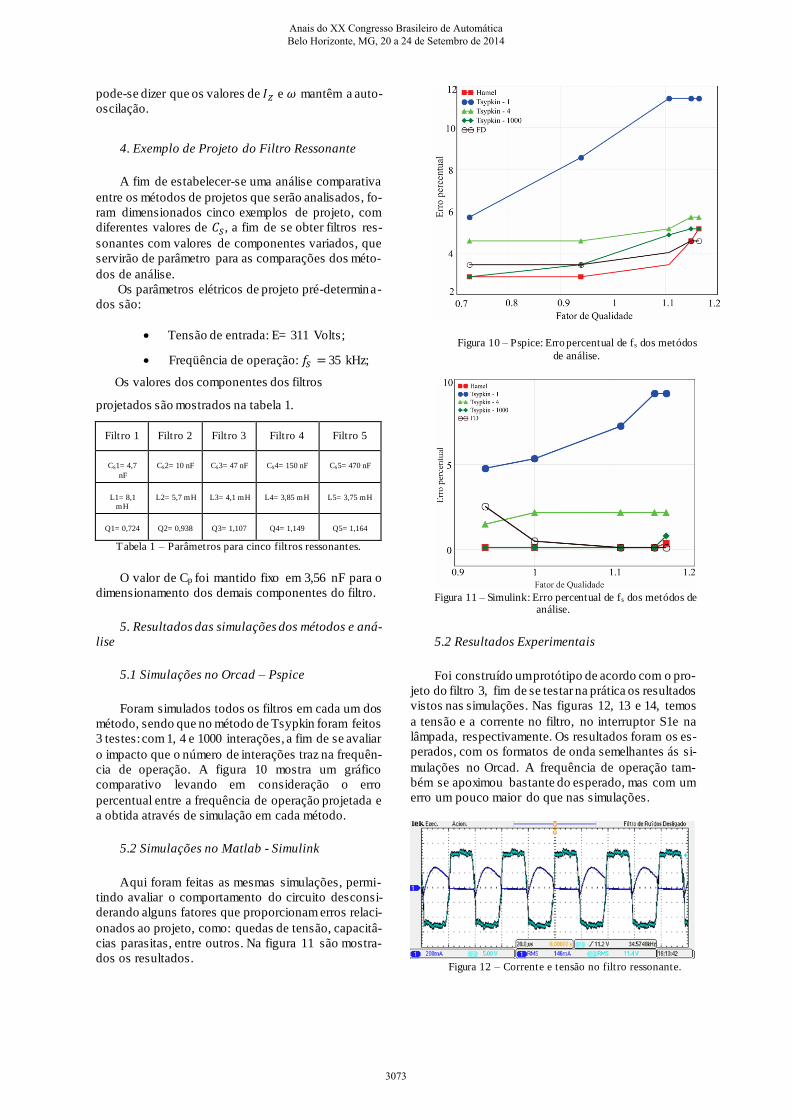
5.1 Simulações no Orcad – Pspice
Foram simulados todos os filtros em cada um dos
método, sendo que no método de Tsypkin foram feitos
3 testes: com 1, 4 e 1000 interações, a fim de se avaliar
o impacto que o número de interações traz na frequên-
cia de operação. A figura 10 mostra um gráfico
comparativo levando em consideração o erro
percentual entre a frequência de operação projetada e
a obtida através de simulação em cada método.
5.2 Simulações no Matlab - Simulink
Aqui foram feitas as mesmas simulações, permi-
tindo avaliar o comportamento do circuito desconsi-
derando alguns fatores que proporcionam erros relaci-
onados ao projeto, como: quedas de tensão, capacitâ-
cias parasitas, entre outros. Na figura 11 são mostra-
dos os resultados.
Figura 10 – Pspice: Erro percentual de fs dos metódos
de análise.
Figura 11 – Simulink: Erro percentual de fs dos metódos de
análise.
5.2 Resultados Experimentais
Foi construído um protótipo de acordo com o pro-
jeto do filtro 3, fim de se testar na prática os resultados
vistos nas simulações. Nas figuras 12, 13 e 14, temos
a tensão e a corrente no filtro, no interruptor S1e na
lâmpada, respectivamente. Os resultados foram os es-
perados, com os formatos de onda semelhantes ás si-
mulações no Orcad. A frequência de operação tam-
bém se apoximou bastante do esperado, mas com um
erro um pouco maior do que nas simulações.
Figura 12 – Corrente e tensão no filtro ressonante.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3073

Figura 13 – Corrente e tensão na chave do invesor HB.
Figura 14 – Corrente e tensão na Lâmpada.
6. Conclusões
Entre os métodos Tsypkin Locus e Hammel Lo-
cus não se observam grandes diferenças nos resultados
obtidos, utilizando um alto número de interações. Esse
fato já era esperado, já que os métodos possuem o
mesmo objetivo final, diferenciando-se pela modela-
gem matemática com que é tratada a relação entre a
impedância, corrente no filtro e a tensão nas chaves.
Tsypkin cria uma expressão para a corrente do filtro
no domínio da frequência que é determinada por um
somatório de impedâncias. Portanto, quando utilizada
a expressão durante o método, existirá sempre um
erro, que é dependente do número de interações que
foram utilizadas no cálculo. No método de Hammel
tem-se uma expressão de IL no domínio do tempo,
onde a impedância é calculada através de frações par-
ciais, utilizando os valores dos pólos e resíduos da ex-
pressão. Isso nos da um valor fixo de impedância e
corrente, tendo como resultado um valor de 𝜀 com
exatidão. Para se obter os resultados de 𝜀 mostrados
na tabela 9, foram utilizadas 1000 interações, o que
tornou o erro muito pequeno, sendo inexistente até em
alguns casos. Em comparação com as simulações
onde se utilizaram poucas interações, os resultados se
diferenciaram bastante. Para apenas uma interação o
método se apresentou ineficaz, apresentando valores
de indutância magnetizante e frequência de operação
bem diferentes do método de Hammel e da FD. Com
4 interações esses valores chegaram mais próximos
aos valores esperados, mas ainda possuíam uma mar-
gem de erro nos valores de 𝜀 e 𝐿𝑚. A frequência de
operação se aproximou mais da frequência de projeto
para os valores de fator de qualidade mais baixos, de-
vido a característica mais indutiva.
Nas simulações com o Orcad temos a presença da
capacitância intrínseca nas chaves, que reduz a
corrente de magnetização Im fazendo com que o
cruzamento com a corrente Is ocorra em períodos
maiores, aumentando o tempo de comutação das
chaves. Com isso, a frequência de operação tende a
dimuir, explicando o motivo de que em todos os casos
se obteve a frequência de operação menor que a
projetada. O que não se pode afirmar ainda é o
impacto dessa influência, que pode ser diferente em
cada método de análise.
Ao considerar as abordagens apresentadas no Si-
mulink, é possível verificar alguns fatores com relação
a adequação dos métodos. A função descritiva permite
estabelecer uma expressão de projeto vinculada a aná-
lise de estabilidade do REAO. Uma abordagem que é
resultado da análise de todo o circuito como um sis-
tema de controle com comportamento não-linear e cri-
tério de estabilidadede extendido de Nyquist. As de-
mais metodologias utilizam expressões aparitr da aná-
lise da corrente ressonante do filtro e corrente de mag-
netização do TC do circuito de comando. Porém, essas
abordagens não estão diretamente vinculadas a análise
de estabilidade do circuito o que torna a função des-
critiva mais adequada devido a vários fatores, tais
como: simplicidade de análise; comportamento do fil-
tro como um circuito passa baixa; permite definir ex-
pressão apatir da análise de estabilidade usando o cri-
tério de estabilidade estendido de Nyquist; bons resul-
tados em termos de erro, isto é, embora seja um mé-
todo aproximado os resultados são muito bons compa-
rado as análises mais precisas.
Referências Bibliográficas
[1] NERONE, L. R. A Mathematical Model of the
Class D Converter for Compact Fluorescent Bal-
lasts.In: Industrial Electronics, IEEE Transactionson,
v. 10, Issue: 06, p. 708-715, 1995.
[2] CHANG, C.; CHANG, J.; BRUNING, G. W.
Analysis of the Self-Oscillating Series Resonant In-
verter for Electronic Ballasts.In: Industry Applica-
tions, IEEE Transactions on, v. 14, Issue: 3. ´; 533-
540, 1999.
[3] SEIDEL, A. R.; PRADO, R. N.; BISOGNO, F. E.;
COSTA, M. A. D.; A Design Method for Electronic
Ballast for Fluorescent Lamps. In: IEEE Industrial
Eletronics Society 2000, v. 4, p. 2279-2284, Record.
[4] CHANG, C.; BRUNING, G. W.. Self-oscillating
electronic ballast analysis via relay systems ap-
proach.In: Industry Applications, IEEE Transaction-
son, v. 27, Issue: 1. ´; 255-261, 2001.
[5] SEIDEL, A, R. Técnicas de projeto para o reator
eletrônico auto-oscilante empregando ferramentas
de controle. Tese (Doutorado em Engenharia Elé-
trica) – Universidade Federal de Santa Maria, Santa
Maria, 2004.
[6] LIU, C.; LIN, P.; TENG, F.; ZHANG, Z.; LU, Z.;
Nonlinear control characteristic research of self-
oscillating electronic ballast. In: IEEE Industry Ap-
plications Society. PESC 2003, v. 2, p. 475 – 479,
2003.
[7] POLONSKII M.; SEIDEL A. R., Reatores eletrô-
nicos para iluminação fluorescente. Ijuí, 224 p,
2008.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3074