Embed Size (px)
Citation preview

André dos Santos Teixeira
Variador de Velocidade para Motor Eléctricocom Frenagem por Recuperação de Energia
Andr
é do
s Sa
ntos
Teix
eira
Setembro de 2011UMin
ho |
201
1Va
riad
or d
e Ve
loci
dade
par
a M
otor
Elé
ctri
coco
m F
rena
gem
por
Rec
uper
ação
de
Ener
gia
Universidade do MinhoEscola de Engenharia

Setembro de 2011
Dissertação de Mestrado
Ciclo de Estudos Integrados Conducentes aoGrau de Mestre em Engenharia Electrónica Industrial e Computadores
Trabalho efectuado sob a orientação doProfessor Doutor Manuel João Sepúlveda Mesquita deFreitas
André dos Santos Teixeira
Variador de Velocidade para Motor Eléctricocom Frenagem por Recuperação de Energia
Universidade do MinhoEscola de Engenharia

i
Agradecimentos
Ao meu orientador, Manuel João Sepúlveda Mesquita de Freitas, pelo apoio e
disponibilidade demonstrados durante o trabalho.
Aos meus colegas de faculdade e laboratório, Amorim, Pedro, Domingos, Renato, Telmo,
Filipe, Flávio, Patrícia, Exposto, João, Hugo pela amizade, companheirismo e cooperação em
diversos momentos da realização do trabalho e do curso.
Aos, técnicos do Departamento de Electrónica Industrial pela sua disponibilidade, simpatia e
profissionalismo presentes no trabalho diário.
Aos meus Pais, Irmão, Avós e Familiares pelo estímulo e apoio dado ao longo do curso.
À Joana pela dedicação e paciência.
A todas as Pessoas não mencionadas que passaram pela minha vida.

ii

iii
Resumo
A energia é um recurso que tem de ser aproveitado de forma eficiente e racional. Só uma
sociedade capaz de se adaptar a estas premissas será capaz de crescer no futuro. Assim todos
os quadrantes sociais e económicos têm um papel a desempenhar.
Os variadores electrónicos de velocidade têm então neste campo um papel importante, pois
podem tornar o consumo energético mais eficiente no accionamento de motores eléctricos.
Neste trabalho foi projectado e implementado um variador de velocidade para accionamento
de um motor de indução trifásico e efectuado o estudo da possibilidade de recuperação de
energia, fazendo o aproveitamento da energia cinética, da carga sujeita ao accionamento.
Essa energia é armazenada num banco de condensadores, de forma a aumentar o rendimento
global sobre do conjunto.
O sistema é constituído por um inversor do tipo fonte de tensão sendo implementado com
IGBTs discretos, um circuito de drive da International Rectifier IR2130, um rectificador de
onda sinusoidal e um circuito para protecção de sobre tensões.
O controlo do tipo V/F em malha aberta de modulação por largura de impulso sinusoidal é
implementado em linguagem C num microcontrolador da Microchip, o PIC 18F4431,
vocacionado para accionamentos para motores eléctricos.
No final são apresentados os resultados experimentais e respectivas conclusões.
Palavras-Chave: motor de indução, variador de velocidade, inversor, eficiência,
momento de inércia, V/F constante, PWM sinusoidal.

iv

v
Abstract
Energy is a resource to be used in a efficient and rational way. Only a society capable of
solving these premises will be able to thrive in the future. In order to do so, all the social and
economic groups must have a word in this matter.
The variable frequency drives are highly important in this subject, due to their ability to
increase efficiency when driving electric motors.
In this work, the analysis of the state of art has been done a variable frequency drive for
driving a tree phase induction machine, has been simulated and developed, and finally the
possibility for electrical energy’s retrieval, by using the kinetic energy, from the load, was
studied. This retrieval is stored in a capacitor’s bank, in order to increase the systems
efficiency.
A voltage souse inverter was implemented with discrete IGBT, a drive circuit from the
International Rectifier IR2130, a full-bridge rectifier and an circuit for the over-voltage
protection.
The V/F (voltage frequency) control was in open loop and pulse whith modulation is
implemented in C language on Microchip´s microcontroller, PIC 18F4431 used in the electric
motor’s driving control.
Finally experimental results are also presented.
Key-Words: induction motor, speed variation, inverter, efficiency, inertia moment, V/F,
Sinusoidal Pulse Width Modulation.

vi

vii
Índice
Agradecimentos .......................................................................................................................... i
Resumo .................................................................................................................................... iii
Abstract ...................................................................................................................................... v
Índice de Figuras ....................................................................................................................... xi
Lista de Siglas e Acrónimos .................................................................................................... xv
Capítulo 1. Introdução ............................................................................................................ 1
1.1. Identificação do Problema ........................................................................................... 1
1.2. Motivações do Trabalho .............................................................................................. 2
1.3. Objectivos da Dissertação ........................................................................................... 3
1.4. Organização da Dissertação ........................................................................................ 3
Capítulo 2. Máquina de Indução ............................................................................................. 5
2.1. Princípio de Funcionamento........................................................................................ 5
2.2. Circuito Equivalente da Máquina Assíncrona ............................................................. 6
2.2.1. Ensaio em Vazio .................................................................................................. 8
2.2.2. Ensaio em Rotor Travado. ................................................................................... 9
2.2.3. Potência e Binário no Rotor ............................................................................... 11
2.3. Funcionamento da Máquina Assíncrona com Frequência Variável.......................... 11
2.4. Funcionamento em Tensão Variável ......................................................................... 12
2.5. Funcionamento como Gerador .................................................................................. 13
2.6. Plano de Operação ..................................................................................................... 14
2.7. Tempos de Aceleração e Frenagem .......................................................................... 14
2.8. Classes da Máquina de Indução ................................................................................ 15
2.9. Conclusão .................................................................................................................. 16
Capítulo 3. Variadores de Velocidade .................................................................................. 17
3.1. Variadores de Velocidade para Máquinas de Indução .............................................. 17
3.2. Topologias de Variadores de Velocidade.................................................................. 19

viii
3.2.1. Inversores CSI .................................................................................................... 19
3.2.2. Inversores VSI ................................................................................................... 20
3.3. Técnicas de PWM ..................................................................................................... 20
3.3.1. PWM Sinusoidal (SPWM) ................................................................................. 21
3.3.2. Modulação com Adição de Harmónicos ............................................................ 22
3.3.3. Modulação Vectorial .......................................................................................... 23
3.4. Técnicas de Controlo ................................................................................................. 24
3.4.1. Tensão/Frequência Constante ............................................................................ 25
3.4.2. Field Oriented Control ....................................................................................... 26
3.5. Semicondutores de Potência ..................................................................................... 27
3.6. Frenagem ................................................................................................................... 29
3.6.1. Frenagem com Corrente Continua ..................................................................... 29
3.6.2. Frenagem com Contra Corrente ......................................................................... 30
3.6.3. Frenagem Dinâmica ........................................................................................... 31
3.7. Frenagem Regenerativa ............................................................................................. 31
3.7.1. Drives com Frenagem ........................................................................................ 33
3.7.2. Pontes SCR ........................................................................................................ 35
3.8. Conclusão .................................................................................................................. 36
Capítulo 4. Simulação do Inversor com Frenagem Regenerativa ........................................ 37
4.1. Modelo de Simulação do Circuito de Potência ......................................................... 38
4.2. Sistema de Controlo .................................................................................................. 40
4.2.1. Simulação da Técnica de Comutação ................................................................ 42
4.2.2. Controlo da Simulação. ...................................................................................... 43
4.3. Resultados das Simulações........................................................................................ 44
4.4. Conclusão .................................................................................................................. 47
Capítulo 5. Implementação Pratica ....................................................................................... 49
5.1. Circuito de Potência .................................................................................................. 50
5.1.1. Máquina Eléctrica Utilizada .............................................................................. 50
5.1.2. Sistema de Alimentação ..................................................................................... 51
5.1.3. Barramento CC .................................................................................................. 52

ix
5.1.4. Protecção do Barramento CC ............................................................................. 53
5.1.5. IGBTs ................................................................................................................. 54
5.1.6. Circuito Snubber ................................................................................................ 56
5.1.7. Circuito de protecção dos IGBTs ....................................................................... 57
5.2. Inversor...................................................................................................................... 58
5.3. Circuito de Drive dos IGBTs .................................................................................... 59
5.3.1. Ligação do IR2130 ............................................................................................. 60
5.4. Painel de Controlo ..................................................................................................... 62
5.5. Controlo ..................................................................................................................... 63
5.5.1. Placa de Controlo ............................................................................................... 64
5.5.2. Ambiente de Trabalho do MPLAB C18 ............................................................ 64
5.5.3. Software de Controlo ......................................................................................... 65
5.5.4. Conclusão ........................................................................................................... 67
Capítulo 6. Resultados obtidos ............................................................................................. 69
6.1. Apresentação dos Resultados .................................................................................... 69
6.2. Conclusão .................................................................................................................. 72
Capítulo 7. Conclusão e Trabalhos Futuros .......................................................................... 73
7.1. Sugestões para Trabalho Futuro ................................................................................ 74
Referencias Bibliográficas ....................................................................................................... 77
7.2. Apêndice I ................................................................................................................. 81

x

xi
Índice de Figuras
Figura 1.1- Relação do factor de potência com a potência consumida [5]. ............................... 2
Figura 2.1- Vista do corte de uma máquina de indução [7]. ...................................................... 5
Figura 2.2 – Desfasamento entre fases [5]. ................................................................................ 6
Figura 2.3- Circuito equivalente da máquina assíncrona. .......................................................... 7
Figura 2.4 - Factor de potência segundo a carga [7]. ................................................................. 8
Figura 2.5 - Circuito equivalente da máquina assíncrona a operar em vazio. ........................... 9
Figura 2.6 - Circuito equivalente da máquina assíncrona com o rotor travado ....................... 10
Figura 2.7 – Variação do deslizamento com a tensão aplicada e respectivos efeitos na
variação no binário e escorregamento da máquina assíncrona [7]. ......................................... 12
Figura 2.8 - Funcionamento como gerador e motor, segundo o deslizamento e binário [8]. .. 13
Figura 2.9 – Operação da máquina assíncrona nos diversos quadrantes [8]. .......................... 14
Figura 2.10 - Binário de Aceleração da carga [8]. ................................................................... 15
Figura 2.11 - Curvas de Binário Vs velocidade da NEMA [7]. ............................................... 16
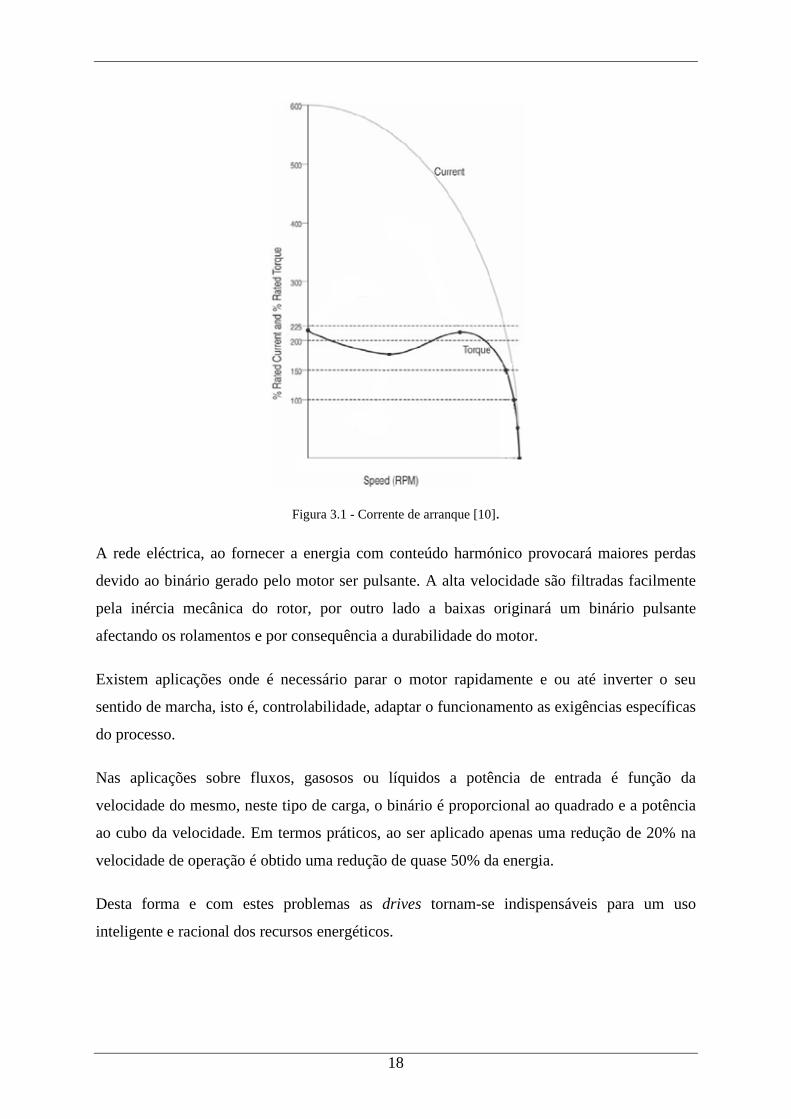
Figura 3.1 - Corrente de arranque [10]. ................................................................................... 18
Figura 3.2 - Topologia CSI (Current Source Inverter) [5]. ..................................................... 19
Figura 3.3 - Tipologia VSI (Voltage Source Inverter) [5]. ...................................................... 20
Figura 3.4 – Trem de impulsos e respectiva onda sintetizada, nas coordenadas a amplitude da
tensão e o tempo nas abcissas. ................................................................................................. 20
Figura 3.5 - PWM sinusoidal - triangular (SPWM). ................................................................ 21
Figura 3.6 - Razão óptima entre o índice de modulação de frequência e o índice de
modulação [13]. ....................................................................................................................... 22
Figura 3.7 - Distorção harmónica: (a) Referência da soma da fundamental com 1/6 do
harmónico de frequência tripla; (b) Referencia já com o acréscimo da componente
fundamental [14]. ..................................................................................................................... 23
Figura 3.8 – Esquema da modulação vectorial [5]. ................................................................. 24
Figura 3.9 - Blocos típicos V/F. ............................................................................................... 25
Figura 3.10 - Resposta dinâmica em Binário (PU) x velocidade [4]. ...................................... 25
Figura 3.11 - Blocos típicos do Field Oriented Control. ......................................................... 27
Figura 3.12 - Resposta de Binário (PU) x Velocidade [4]. ...................................................... 27
Figura 3.13 - Drives; a) Ponte trifásica, b) Barramento das ligações internas das pastilhas
[17]. .......................................................................................................................................... 27
Figura 3.14 - a) “SEMIKUBE IGBT SEMIKUBE” de 120A a 1460ª , vocacionada para
sistemas solares; b) “SKAI IGBT System” de 20kVA, dispositivos compactos da indústria,
para aplicações em veículos [18]. ............................................................................................ 28
Figura 3.15- Semicondutores de Potência [5]. ......................................................................... 28

xii
Figura 3.16 - Mecanismos de frenagem, a) Travão de disco, b) KERS mecânico, c) Flywheel
[20][21][22].............................................................................................................................. 29
Figura 3.17 - Ligação em paralelo dos enrolamentos em triangulo e estrela respectivamente.
.................................................................................................................................................. 30
Figura 3.18 - Gráfico do Binário e velocidade. ....................................................................... 30
Figura 3.19 - Travagem dinâmica; a) Resistência, b) Aumento da tensão no barramento CC
[7][23]. ..................................................................................................................................... 31
Figura 3.20 - Diminuição da frequência de alimentação de fo para f1 [7]. ............................... 31
Figura 3.21- Exemplos dos mais avançados sistemas de armazenamento comercialmente
disponíveis; a) e b) Super-condensadores, c) Condensador, d) bateria continental
[24][25][26][27]. ...................................................................................................................... 32
Figura 3.22 - Active Front end Drive [30]. .............................................................................. 33
Figura 3.23 – Esquema de ligação da “1336 REGEN” da Rockwell Automation [31]. ........... 34
Figura 3.24 - Transferência de potência: a) da carga para a rede; b) da rede para a carga. ..... 34
Figura 3.25 - Ponte com dispositivo de inversão de polaridade [32]. ...................................... 35
Figura 3.26 - Ponte dupla rectificadora e inversora a tiristores [32]. ...................................... 35
Figura 3.27 - Ponte com auto-transformador [32]. .................................................................. 36
Figura 4.1 - Aspecto visual do PSCAD/EMTDC. ................................................................... 37
Figura 4.2 - Circuito de potência. ............................................................................................ 38
Figura 4.3 - Campos preenchidos no modelo da máquina de indução. ................................... 40
Figura 4.4 - PI do controlo V/F. ............................................................................................... 40
Figura 4.5 - Esquema simplificado do controlador. ................................................................. 41
Figura 4.6 - Rampa V/F. .......................................................................................................... 41
Figura 4.7 - Modelo de simulação do PWM bipolar. .............................................................. 43
Figura 4.8 - Sistema de selecção de velocidade e carga do motor. .......................................... 43
Figura 4.9 - Sinais de controlo. Recta – Valor V/F; f – frequência; w_motor – velocidade
angular do motor (rad/s); w_ref – velocidade referência do motor; w_travagem – variável de
input aquando da travagem. ..................................................................................................... 44
Figura 4.10 - Gráficos das potências, Activa (Pa), Reactiva (Q) e Aparente (S) e respectivo
factor de potência (Pf). ............................................................................................................. 45
Figura 4.11 - Corrente na fase "a". .......................................................................................... 46
Figura 4.12 - Tensão e Corrente no barramento CC. Icond – Corrente no condensador; ifonte
– Corrente da rede; Idc – Corrente de saída do barramento; Vdc1 – Tensão no barramento
CC. ........................................................................................................................................... 46
Figura 5.1 - Aspecto global da bancada de trabalho. ............................................................... 49
Figura 5.2 - Circuito de potência. ............................................................................................ 50
Figura 5.3 - a) Interruptor geral do circuito de potência. b)Auto-transformador. ................... 51
Figura 5.4 - Esquema típico do regulador. ............................................................................... 51
xiii
Figura 5.5 - Fotografia do sistema de alimentação, constituído pelo disjuntor de curto-circuito
fontes de tensão contínua de +5V e +15V, contadora de carregamento do condensador, e
outra para ligar e desligar o circuito de potência. .................................................................... 52
Figura 5.6 - Rectificador com filtro e pormenor de construção do filtro. ................................ 52
Figura 5.7 - Ligação interna dos condensadores. ..................................................................... 53
Figura 5.8 - Aspecto do Travão dinâmico. .............................................................................. 54
Figura 5.9 - a) Circuito equivalente do IGBT; b) Símbolo; c) com doido de freewheeling. ... 55
Figura 5.10 - Encapsulamento TO-220. ................................................................................... 55
Figura 5.11 - Formas de onda nas comutações aos terminais do IGBT durante as comutações
[40]. .......................................................................................................................................... 56
Figura 5.12 - Tipos de Snubbers(a) RC; (b) Supressor de carga e descarga RCD; (c)
Supressor de descarga; (d) C; (e) RCD [41]. ........................................................................... 56
Figura 5.13 - Condensador em polipropileno da empresa EPCOS. ......................................... 57
Figura 5.14 - Ligação da gate do IGBT [44]. .......................................................................... 57
Figura 5.15 - Fotografia da parte de baixo do inversor............................................................ 58
Figura 5.16 – Pormenor da construção do inversor, barramento +Vcc, Gnd e pistas de tensão
alternada. Podem ser vistos também os supressores de tensão. ............................................... 59
Figura 5.17 - Aspecto do circuito de drive dos IGBTs e acopladores ópticos. ........................ 60
Figura 5.18- Montagem do IR2130 utilizada[48]. ................................................................... 61
Figura 5.19 - Ligação do acoplador óptico. ............................................................................. 61
Figura 5.20 - Aspecto do painel de controlo. ........................................................................... 62
Figura 5.21 - Diagrama de blocos do andar de controlo. ......................................................... 63
Figura 5.22 - Legenda da referência dos pinos do PIC18F4431. ............................................. 64
Figura 5.23 - Ambiente de programação do MPLAB C18. ..................................................... 65
Figura 5.24 - Fluxograma da função principal do controlo. .................................................... 66
Figura 6.1 - Sinais de comando das gates. ............................................................................... 69
Figura 6.2 – Visualização do Dead-time.................................................................................. 70
Figura 6.3 – Ondas referentes as correntes nas fases no arranque com Boost, medidas nos
enrolamentos do motor. ........................................................................................................... 70
Figura 6.4 – Ondas referentes as correntes no arranque depois do boost. ............................... 71
Figura 6.5 – Formas de onda das correntes na aceleração. ...................................................... 71
Figura 6.6 – Tensão aos nos enrolamentos do estator. ............................................................ 72
Figura 6.7 – Tensão aos nos enrolamentos do estator a uma frequência máxima de 50Hz. ... 72

xiv
xv
Lista de Siglas e Acrónimos
R Resistência
L Indutância
C Capacidade
v Tensão em Corrente Alternada
CA Corrente Alternada
Vcc Tensão do lado da Corrente Contínua
V Tensão Eficaz Tensão de Pico
i Corrente Instantânea
I Corrente Eficaz Corrente de Pico
f Frequência
cos (ø) Coseno do Desfasamento entre a Tensão e a Corrente
CC Corrente Continua
V Tensão em CC
A Ampere
Ω Ohm
W Watt
H Henry
F Farad
Hz Hertz
s Segundo
rad/s Radianos por Segundo
µ Micro (10-6)
m Mili (10-3)
k Kilo (103)
M Mega (106)
THD Taxa de Distorção Harmónica
FP Factor de Potência
P Potência Activa

xvi
S Potência Aparente
PWM Pulse Width Modulation
VSI Voltage Source Inverter
CSI Current Source Inverter
CC Corrente Continua
NPC Neutral Point Clamped
PI Proporcional Integral
ADC Analog to Digital Converter
USB Universal Serial Bus
LC Indutivo e Capacitivo
Mtoe Million Tonnes of Oil Equivalent
FEM Força Electromotriz
USART Universal Synchronous Asynchronous Receiver Transmitter
UART Universal Asynchronous Receiver/Transmitter
SPI Serial Port Interface
IDE Integrated Development Environment

1
Capítulo 1.
Introdução
1.1. Identificação do Problema
Em Março de 2007, a União Europeia estabeleceu uma agenda política energética e
ambiental nos seus estados membros, acordada pelo Conselho Europeu que visa atingir
objectivos em matéria de sustentabilidade, competitividade e segurança do aprovisionamento
energético, de forma a tornar realidade a meta dos “20-20-20”. Tendo como objectivo a
redução das emissões de gases de efeito de estufa, o aumento da quota-parte de energias
renováveis, e a melhoria da eficiência energética, em 20%, até 2020 comparativamente com
os níveis de 1990 [1].
De toda a energia consumida 54% é importada, com um custo anual de aproximadamente
700€ por cada cidadão europeu, desta forma a eficiência energética tem um papel crítico a
desempenhar, pois permite comparativamente atingir os objectivos ao menor custo [1].
Atingindo os objectivos serão poupados 400 milhões de toneladas equivalentes de energia
primária (Mtoe), desta forma será dispensável a construção de 1000 centrais térmicas a
carvão e meio milhão de turbinas eólicas e assim directamente as emissões de CO2 sofrerão
uma redução de 860 Mtoe [2].
Esta medida foi igualmente acordada no contexto do G8 (grupo dos 7 países mais
industrializados do mundo mais a Rússia) em Julho de 2008 tendo em vista a implementação
pela Agência de Energia Internacional (IEA). Proporciona também uma boa oportunidade de
negócio para as Pequenas e Medias Empresas (PME) de desenvolver processos tecnológicos
mais eficientes. Esta será reforçada com a criação de uma etiqueta para ajudar a diferenciação
dos produtos sendo desta forma o consumidor melhor sensibilizado para as questões de
eficiência energética [3].
A electrónica de potência permite converter e controlar a energia de forma eficiente. Com o
forte crescimento do mercado energético e aproveitando o elevado investimento que é

2
disponibilizado para as energias alternativas, o preço dos dispositivos de electrónica de
potência, silício, encontra-se a decrescer tornando os sistemas cada vez mais baratos,
pequenos e robustos [4]. Assim com a indústria a exigir melhoria nos processos fabris os
avanços tecnológicos nos semicondutores e evolução nos microcontroladores em executar
rapidamente algoritmos complexos, é possível construir equipamentos com excelentes
respostas dinâmicas como é o caso dos variadores de velocidade para motores de indução.
1.2. Motivações do Trabalho
No início, as máquinas eléctricas de corrente alternada eram sobredimensionadas de
forma a trabalharem apenas para uma carga específica, assim o seu rendimento era inferior ao
nominal.
O accionamento por meio de variador de velocidade permite o funcionamento numa vasta
gama de velocidades e ainda aumentar o factor de potência e a eficiência principalmente
aquando de operação abaixo da carga nominal. No arranque evita o pico de corrente e o baixo
factor de potência, comparativamente com um accionamento directo de velocidade constante.
Esta comparação é exemplificada na Figura 1.1 [5].
Figura 1.1- Relação do factor de potência com a potência consumida [5].
Grande parte da energia eléctrica gerada é usada por máquinas eléctricas rotativas. Por
exemplo, as bombas e ventiladores, são dispositivos que actuam em todas as áreas de
consumo, habitacional, industrial, serviços e transportes. O custo de um motor eléctrico e a
sua manutenção é muito reduzido comparativamente com o custo de energia por ele usada no

3
seu tempo de vida [6]. A motivação deste trabalho foi então estudar, simular e implementar
um variador de velocidade para motores de indução trifásico capaz de efectuar frenagem com
recuperação de energia.
1.3. Objectivos da Dissertação
Com este projecto pretendeu-se desenvolver e testar um sistema de accionamento de
velocidade variável para um motor eléctrico capaz de fazer frenagem com recuperação de
energia, com vista a aumentar o rendimento energético.
Os objectivos específicos a atingir foram a simulação, desenvolvimento e implementação de
um conversor electrónico de potência para accionar motores eléctricos e fazer o estudo da
frenagem do motor com recuperação de energia.
Fazer o estudo teórico da máquina de indução trifásica e descrição da forma de determinação
das suas características eléctricas.
Finalmente fazer a implementação prática de um sistema de controlo baseado em
microcontrolador e respectivas interfaces com o circuito de potência.
1.4. Organização da Dissertação
Este documento encontra-se estruturado em seis capítulos, de acordo com as várias fases
do trabalho, assim este documento encontra-se estruturado na seguinte forma:
No primeiro capítulo, é feita uma introdução ao trabalho, motivações e objectivos onde se
insere o trabalho.
No segundo capítulo é descrita a máquina assíncrona, os testes e cálculos para determinar as
suas características.
No terceiro capítulo é abordado o estado de arte dos sistemas de accionamento, como é o
caso dos quadrantes de operação, topologias mais comuns, tipos de modulação,
semicondutores e por fim, de que forma é efectuada o aproveitamento da energia cinética
(através da travagem regenerativa).

4
No capítulo quatro é especificado o projecto (performance, formulação da topologia,
configuração da máquina e do conversor, e desenho do conversor) e é apresentada a
simulação realizada no software PSCAD/EMTDC do circuito de potência e do sistema de
controlo do inversor e seu controlo e demonstrado o funcionamento aquando da frenagem
regenerativa.
O capítulo cinco descreve a implementação do hardware e software do projecto.
No sexto capítulo os resultados obtidos algumas formas de onda, resultantes dos testes
experimentais são apresentadas.
No sétimo e último capítulo são apresentadas as conclusões e feitas as propostas para
trabalhos futuros.

5
Capítulo 2.
Máquina de Indução
Neste terceiro capítulo é descrito o princípio de operação do motor trifásico de indução ou
motor assíncrono, mais especificamente uma das variantes de rotor em gaiola de esquilo. A
sua constituição mecânica e particularidades eléctricas de funcionamento, criação do campo
magnético no estator e produção de binário no rotor. O modelo equivalente por fase é
apresentado bem como os cálculos para determinar as suas características.
2.1. Princípio de Funcionamento
A máquina assíncrona é amplamente adoptada devido ao seu baixo custo e robustez. É
constituída basicamente por duas partes, a fixa denominada de estator e a móvel, o rotor. Na
Figura 2.1 é apresentado o diagrama do corte da máquina de indução.
Legenda:
(1) Ranhura do estator.
(2) Lâminas do estator.
(3) Veio.
(4) Entreferro.
(5) Lâminas do rotor.
(6) Ranhura do rotor.
O estator fisicamente é constituído pelo conjunto de enrolamentos embutidos em lâminas de
ferro, sendo responsáveis por produzir o campo girante, ou campo magnético rotacional que
induzirá correntes no rotor. O binário que accionará a carga mecânica, resulta da interacção
dos campos do indutor e induzido.
Quando aplicadas as três tensões do sistema trifásico aos terminais do estator, é originada a
corrente alternada nos seus enrolamentos, estas responsáveis pela criação de um campo
magnético (campo magnético girante) síncrono com a frequência da rede.
Figura 2.1- Vista do corte de uma máquina de indução [7].

6
No tipo de máquina trifásica mais simples, o campo girante é produzido por três
enrolamentos no estator separados electricamente de 120º, como é visualizada na Figura 2.2.
Um ciclo do campo girante é completado a cada ciclo da frequência de alimentação.
Figura 2.2 – Desfasamento entre fases [5].
Assim a velocidade do campo girante ou velocidade de sincronismo ( em r.p.m.) em função
do número de pares de pólos () e frequência ( em Hz) é dada pela equação 2.1.
= .
(. .. ) (2.1)
Este tipo de máquina caracteriza-se pela velocidade do rotor ( em . . .) não ser igual à do
campo magnético girante (), devido ao deslizamento. Á medida que a carga aumenta, a
diferença entre as velocidades também a este factor dá-se o nome de escorregamento ou
deslizamento () de acordo com a equação 2.2.
=
. 100(%) (2.2)
2.2. Circuito Equivalente da Máquina Assíncrona
O circuito equivalente da máquina assíncrona é importante para perceber o que acontece
quando a tensão, a frequência, o binário e ou o deslizamento são variados. Na Figura 2.3
encontra-se o esquema equivalente do motor de indução, representando uma das fases.
Os valores são determinadas, através da medição, e dos testes em vazio e em rotor travado, as
características de funcionamento podem ser assim determinadas. A resistência de carga
variável ()
.´ é equivalente, no modelo, à conversão de potência eléctrica para potência
mecânica . A potência absorvida por esta resistência é igual a potência mecânica, sendo

7
que para uma máquina trifásica a expressão na equação 2.3, permite obter a potência
mecânica desenvolvida pelo motor.
= 3. ` .()
. (2.3)
O binário é proporcional à potência dividida pela velocidade, e com a velocidade de rotação
proporcional a 1 − s, então na equação 2.4 permite calcular o binário eléctrico do motor.
=
.
(2.4)
As perdas podem ser avaliadas sendo que e representam as resistências do rotor e
estator por fase, respectivamente, e as perdas no ferro, considerando-se constantes.
Figura 2.3- Circuito equivalente da máquina assíncrona.
Legenda:
Rs Resistência do enrolamento de uma fase do estator.
RP Resistência que representa as perdas no ferro, correntes de Foucault.
R’r/s Resistência efectiva do rotor vista pelo estator, sendo variável com o deslizamento.
Xls Reactância de dispersão de uma das fases do estator.
X’lr Reactância de dispersão do rotor vista pelo estator.
Xms Reactância de magnetização vista do estator.
Vs Tensão simples numa das fases do estator.
Es Tensão induzida numa das fases.
I´r Corrente do rotor reflectida no estator, produz o binário no rotor dependente da carga.
Iex Corrente de excitação, gera o magnético de estator.
Is Corrente numa das fases do estator. É a soma vectorial de Iex +Ir.
A corrente absorvida é apenas correspondente às perdas constantes na medida em que a carga
é admitida a ´ diminui, a potência e o binário aumentam. O factor de potência evolui da
forma demonstrada na Figura 2.4 de acordo com o aumento da carga mecânica, pois sem
carga o factor de potência é baixo devido as correntes de magnetização, a medida que

8
aumenta a deslizamento também e por consequência a ()
. diminui e a corrente activa
aumenta, aumentando assim o factor de potência.
Figura 2.4 - Factor de potência segundo a carga [7].
2.2.1. Ensaio em Vazio
Para determinar os valores dos paramentos é necessário recorrer aos ensaios como já
referido. No caso do ensaio em vazio a máquina opera como motor sem carga alimentado á
tensão e frequência nominal, sendo a potência mecânica de saída igual a zero. Girando na
velocidade próxima de sincronismo e com um deslizamento baixo, ()
. irá ser
considerada infinita, assim sendo o circuito a considerar é o da Figura 2.5.
Assim sendo este ensaio dá a informação acerca da corrente de excitação () mas também
das perdas constantes, isto é, perdas magnéticas, perdas por atritos mecânicos e ventilação e
por fim perdas nos enrolamentos por efeito de Joule. As perdas são usualmente consideradas
constantes no motor em funcionamento à plena carga. Na equação 2.7 e equação 2.8 as são
apresentadas as perdas constantes . Os resultados a retirar desta análise, são a tensão e frequência e corrente de linha (), e por
fim potência absorvida. Obtendo a resistência do enrolamento (), através do ensaio em
corrente contínua ou com um medidor de resistência.

9
Figura 2.5 - Circuito equivalente da máquina assíncrona a operar em vazio.
= + + (2.5)
= 3. . + (2.6)
Impedância equivalente em Vazio:
= (2.7)
Resistência equivalente em Vazio:
=
3. (2.8)
Reactância equivalente em Vazio: = 1 − (2.9)
Assim sendo:
+ = (2.10)
2.2.2. Ensaio em Rotor Travado.
Este ensaio é realizado bloqueando o rotor e aplicando uma tensão alternada
sinusoidal aos terminais do estator, o deslizamento será igual a 1 e por consequência a
potência mecânica produzia pelo motor ()
.´ = 0, a reactância de magnetização
está em paralelo com a baixa impedância do rotor, sendo assim muito superior a esta. Na
Figura 2.6 o circuito equivalente.

10
Figura 2.6 - Circuito equivalente da máquina assíncrona com o rotor travado
Do ensaio de rotor travado, a resistência equivalente é a seguinte:
=
3. (2.11)
Analisando o circuito, e responsável pelas perdas ohmicas no rotor ´ temos:
´ = − (2.12)
A impedância do rotor travado é:
= (2.13)
A reactância do rotor do rotor travado será:
= 1 − (2.14)
Nota, para um motor de classe A ou B:
≈ + ; = =
2 (2.15)
Sendo portanto a impedância de magnetização:
= − (2.16)

11
2.2.3. Potência e Binário no Rotor
A potência eléctrica de um motor de indução trifásico é dada pela equação 2.17 onde é a tensão composta aos terminais do estator a corrente na linha e o ângulo de
desfasamento entre as duas.
= √3. . . cos (2.17)
A potência mecânica, é a subtracção à potência eléctrica as perdas, na resistência do estator
na equação 2.18, perdas no ferro na equação 2.19 e no rotor na equação 2.20.
3. . (2.18)
3. . (2.19)
3. . (2.20)
2.3. Funcionamento da Máquina Assíncrona com Frequência Variável
Ao ser aplicada uma tensão com uma frequência variável aos terminais da máquina
assíncrona a sua velocidade síncrona variável, segundo a equação 2.1. A reactância indutiva
do estator é directamente proporcional a frequência do circuito como a equação 3.12
expressa.
= . (2.21)
De forma que para manter constante a relação entre a corrente e a frequência de operação,
estas terão de ser ajustadas da mesma forma. Esta é a chamada constante volts por hertz.
Se a máquina assíncrona opera a frequências baixas, a tensão na resistência (Rs) do estator
será significante (à medida que a reactância fica menor R1 fica proporcionalmente maior),
assim o binário irá cair. Caso a máquina opere acima das frequências nominais, a tensão não
pode ser aumentada acima da tensão nominal e a corrente de magnetização da máquina irá ser
reduzida, este modo de operação dá-se o nome de field weakening.

12
2.4. Funcionamento em Tensão Variável
A aplicação do conceito prático de fazer variar a velocidade por meio apenas da variação
da tensão não é aplicada de uma forma usual. O binário e por consequência o binário varia
conforme a tensão como demonstra a Figura 2.7 e a equação 2.22.
Figura 2.7 – Variação do deslizamento com a tensão aplicada e respectivos efeitos na variação no
binário e escorregamento da máquina assíncrona [7].
=..´
...´
´
(2.22)
Onde:
Binário.
Velocidade síncrona.
´ Resistência do rotor.
Deslizamento.
Reactância de dispersão do estator.
´ Reactância de dispersão do rotor.
Resistência do estator.

13
2.5. Funcionamento como Gerador
A máquina de indução trabalha sempre com deslizamento mesmo sem carga, pois é
necessário ter binário suficiente para se sobrepor às perdas mecânicas. Acontece que se o
deslizamento diminuir até zero, a tensão e corrente induzida no rotor e binário serão nulos,
pelo que o motor deixa de produzir trabalho. Caso a velocidade do rotor seja maior do que a
velocidade síncrona do campo girante, os condutores do rotor voltam a cortar as linhas do
campo magnético, induzindo assim força electromotriz mas em sentido contrário. Da lei de
Lenz que diz que o sentido da corrente é o oposto da variação do campo magnético que lhe
deu origem, invertendo o sentido das correntes no estator.
Assim a curva de binário-velocidade pode ser representada segundo o deslizamento como
representado na Figura 2.8., a curva de funcionamento como gerador é semelhante à de
motor, pois o circuito equivalente é o mesmo. Assim sendo o deslizamento é considerado
positivo como motor e negativo como gerador.
Figura 2.8 - Funcionamento como gerador e motor, segundo o deslizamento e binário [8].

14
2.6. Plano de Operação
Na Figura 2.9 está representado o plano dividido em quatro quadrantes da capacidade de
transferência de energia do sistema máquina eléctrica/carga. No 1º e 3º quadrante a máquina
eléctrica funciona como motor e a transferência energética é efectuada da forma eléctrica
para mecânica. No 2º e 4º a transferência dá-se em sentido inverso, funcionando assim como
gerador, a transferência de energia passa a ser da forma mecânica (energia cinética) para
eléctrica.
Figura 2.9 – Operação da máquina assíncrona nos diversos quadrantes [8].
2.7. Tempos de Aceleração e Frenagem
O cálculo dos tempos de aceleração e desaceleração são importantes para evitar sobre
aquecimentos do motor devido às altas correntes de arranque ou de frenagem. Este processo
depende do binário de aceleração (Ta), que é a diferença entre o binário do motor (Tm) e o
binário da carga (Tl), como expresso na equação 2.23.
= − (2.23)
Logo, para existir aceleração da carga, o binário do motor tem de exceder o binário da carga.
Quando maior for o binário de aceleração menor será o período de tempo de aceleração e
vice-versa. O binário de carga depende do seu momento de inércia (J em Kg/m^2). No caso

15
de um objecto em rotação isto é descrito pela equação 2.24.
=
(2.24)
Ajustando a equação para a velocidade angular em r.p.m., fica a equação 2.25:
= !
.
(2.25)
Caso o binário de aceleração seja constante durante o período de aceleração, a equação 2.26:
Δt = J!
.
(" ")
# (2.26)
A aceleração ou desaceleração é efectuada conforme o valor é maior ou menor que . Durante a aceleração o motor desenvolve não apenas o binário da carga mas também uma
componente adicional
, de forma a vencer a inércia, esta componente determina a
aceleração do sistema. O binário dinâmico tem valor positivo durante a aceleração e negativo
na desaceleração.
Figura 2.10 - Binário de Aceleração da carga [8].
2.8. Classes da Máquina de Indução
A Associação Nacional Americana de Fabricantes Eléctricos (NEMA) especifica padrões,
onde descreve quatro categorias de máquinas de indução, A, B, C e D. As curvas de binário-
-velocidade são características para cada classe na Figura 2.11 [9].
Tipo A: O binário de arranque e situa-se na gama dos 150-170% do nominal, desta forma as
correntes de arranque são altas. O binário final é o mais alto de todas as classes. São
preparadas para grandes sobrecargas por períodos pequenos de tempo. O deslizamento típico

16
é inferior a 5%. Uma das aplicações típicas é nas máquinas injecção de moldes.
Tipo B: A mais comum, o binário de arranque é idêntico ao da do tipo A, mas com menor
corrente de arranque, o escorregamento é inferior a 5%. O factor de potência à plena carga é
comparativamente elevado. As aplicações típicas incluem bombas, ventoinhas e ferramentas.
Tipo C: Tem um binário de arranque na ordem dos 200%, mais elevado do que as de A e B
mas com uma menor corrente, o deslizamento típico situa-se em abaixo dos 5%. São
aplicadas em situações onde a velocidade seja a nominal, sem sobrecargas, como são
exemplo as passadeiras, trituradores, compressores etc.
Tipo D: Possui o maior binário de arranque, a corrente, velocidade e carga nominal são as
mais baixas, o deslizamento situa-se na ordem dos 5-13%, assim é tipicamente aplicado em
situações com bruscas variações de carga, disso são exemplo os volantes de inércia,
elevadores, gruas, etc.
Figura 2.11 - Curvas de Binário Vs velocidade da NEMA [7].
2.9. Conclusão
A máquina assíncrona devido à sua ampla aceitação, é hoje usada para os mais diversos
fins e em aplicações mais variadas. Este facto resulta de ser robusta, barata comparativamente
com outras máquinas eléctricas e muito bem estudada com modelos matemáticos bem
conhecidos (em regime permanente).
17
Capítulo 3.
Variadores de Velocidade
Neste capítulo, será descritas as topologias de inversores mais comuns, tipos de PWM,
semicondutores utilizados e por fim, como é efectuado o aproveitamento da energia cinética
na frenagem regenerativa.
3.1. Variadores de Velocidade para Máquinas de Indução
As ASD (Adjustable speed drives) ou Drives, variadores de velocidade para motores
eléctricos são circuitos extremamente importantes, são dispositivos conversores de energia
que permitem a partir de uma tensão ou corrente contínua a sintetização de tensão sinusoidal,
variando a amplitude, frequência e fase e assim modelar o funcionamento de um motor.
Em termos de eficiência energética, as drives são uma alternativa aos accionamentos directos:
o arranque, originará um pico de corrente devido a ausência da força electromotriz (FEM), (a
corrente de arranque pode ser vista na Figura 3.1), o que dará origem a problemas de
qualidade de energia, os enrolamentos podem-se danificar mais rapidamente devido ao
aquecimento, e à rotura do material dieléctrico, poderá causar subtensões na linha e afectar o
normal funcionamento e performance dos equipamentos vizinhos.
Quando funciona em vazio as correntes nas fases do motor são maioritariamente de
magnetização, o que faz dela fortemente indutiva. Desta forma o factor de potência é muito
baixo. Quando a carga aumenta a componente activa da corrente também, e como a corrente
de magnetização se mantêm constante o factor de potência aumentará.
18
Figura 3.1 - Corrente de arranque [10].
A rede eléctrica, ao fornecer a energia com conteúdo harmónico provocará maiores perdas
devido ao binário gerado pelo motor ser pulsante. A alta velocidade são filtradas facilmente
pela inércia mecânica do rotor, por outro lado a baixas originará um binário pulsante
afectando os rolamentos e por consequência a durabilidade do motor.
Existem aplicações onde é necessário parar o motor rapidamente e ou até inverter o seu
sentido de marcha, isto é, controlabilidade, adaptar o funcionamento as exigências específicas
do processo.
Nas aplicações sobre fluxos, gasosos ou líquidos a potência de entrada é função da
velocidade do mesmo, neste tipo de carga, o binário é proporcional ao quadrado e a potência
ao cubo da velocidade. Em termos práticos, ao ser aplicado apenas uma redução de 20% na
velocidade de operação é obtido uma redução de quase 50% da energia.
Desta forma e com estes problemas as drives tornam-se indispensáveis para um uso
inteligente e racional dos recursos energéticos.

19
3.2. Topologias de Variadores de Velocidade
O componente principal é o inversor, este é constituído pelos semicondutores de potência
que operando nas suas zonas de abertura e fecho sintetizam as ondas sinusoidais com
determinada amplitude e frequência.
Existem várias tipologias, podem ser monofásicas, trifásicas e até com mais de três fases, a
sua classificação mais generalista tem como base o tipo de barramento CC sendo os mais
usuais os VSI (Voltage Source Inverter) e os CSI (Current Source Inverter), inversor fonte de
tensão e fonte de corrente respectivamente.
3.2.1. Inversores CSI
Os inversores CSI, como o da Figura 3.2, usam grandes indutâncias no barramento
CC que actuam como uma fonte de corrente. São normalmente usados para potências muito
elevadas, são mais eficientes a baixas frequências e permitem facilmente a inversão do fluxo
de energia, são robustos contra curto-circuitos [8].
Figura 3.2 - Topologia CSI (Current Source Inverter) [5].

20
3.2.2. Inversores VSI
Os inversores VSI, na Figura 3.3 foram na década de 90 amplamente utilizados [11].
Estes inversores usam um ou mais condenadores no barramento CC e servem como fonte de
tensão. São maioritariamente aplicados em drives de pequena e media potência. Existem duas
variantes no que respeita ao seu controlo, por tensão VCVSI (Voltage Controlled Voltage
Source Inverter), regulam a tensão de saída através de uma tensão pulsada e os controlados
por corrente CCVSI (Current Controlled Voltage Source Inverter) estes, regulam a mesma
tensão através do controlo da corrente na carga [4].
Figura 3.3 - Tipologia VSI (Voltage Source Inverter) [5].
3.3. Técnicas de PWM
A modulação por largura de impulso, PWM (Pulse with modulation) é uma técnica de
comutação de semicondutores que permite variar a energia fornecida pela fonte à carga.
Consiste em um trem de impulsos onde o duty-cycle (D) é modelado de forma variar o valor
médio, onde o valor médio é função de D o tempo a ON e da amplitude do sinal Y. Na Figura
3.4 é apresentado um exemplo. Existem vários tipos de técnicas as mais comuns serão
apresentadas nos capítulos seguintes [12].
Figura 3.4 – Trem de impulsos e respectiva onda sintetizada, nas coordenadas a amplitude da tensão e o
tempo nas abcissas.

21
3.3.1. PWM Sinusoidal (SPWM)
Esta técnica de modulação é a mais difundida, e o seu funcionamento consiste em
comparar uma onda sinusoidal de frequência igual a onda a sintetizar, com uma onda
triangular periódica de frequência fixa, designada por portadora (Fp), várias vezes superior à
da onda a sintetizar, sendo os pulsos gerados nos instantes das intercepções da portadora com
a sinusoidal a sintetizar, como ilustrado na Figura 3.5.
Figura 3.5 - PWM sinusoidal - triangular (SPWM).
A resultante é uma onda cuja componente fundamental é uma sinusoidal com a amplitude e
frequência da modulante. A razão entre o valor de amplitude da referência sobre a portadora
dá-se o nome de índice de modulação () como descrito na equação 2.1. Caso seja maior
do que 1, o inversor opera na zona de sobre-modulação diminuindo as comutações, que no
limite tende para uma onda quadrada, operando numa zona de não linearidade entre a
amplitude da referência e a saída, provocando o aumento do conteúdo harmónico e distorção
da onda de saída. A relação entre estes factores é relacionada na Figura 3.6.
=
(3.1)
A razão entre a frequência da portadora () e a frequência da sinusóide de referência ()
define o índice de modulação de frequência (), equação 2.2. Quanto maior for a
frequência de operação dos semicondutores em relação à onda de referência, mais perfeita é a
onda sinusoidal resultante, em contrapartida as perdas de comutação são directamente
proporcionais a frequência de comutação. É de referir que, sempre que possível a escolha
desta frequência situa-se fora da gama audível pelo ser humano, se a potência assim o
permitir [12].
=
(3.2)
Quando é um valor inteiro (caso não seja inteiro são criados sub-harmónicos), à
modulação dá-se o nome de síncrona ideal, e caso o valor seja par, bipolar e impar unipolar, é

introduzido na onda fundamental um conteúd
diminui com o aumento da razão
Na Figura 3.6 são referenciadas
(), existem assim duas zonas, a linear onde a resultante é uma onda sinusoidal e a de
sobre-modulação na qual o resultado se assemelhará a uma onda quadrada.
Figura 3.6 - Razão óptima entre o índice de modulação de frequência e o índice de
3.3.2. Modulação com
A modulação PWM sinusoidal tem desvantagens no que toca ao desaproveitamento
da tensão do barramento, pois a tensão de saída será sempre menor do que a de entrada, est
abordagem de método torna mais eficiente o aproveitamento
São adicionados harmónicos triplos à referência si
que a soma num sistema trifásico em estrela os anula, a
ordem á onda modulada tem
factor de aproximadamente 0,
constatado na Figura 3.7 (a). Desta forma assim para aumentar o factor de utilização da
22
introduzido na onda fundamental um conteúdo indesejável (harmónicos pares) este conteúdo
diminui com o aumento da razão ().
são referenciadas as zonas de modulação com relação ao índice de modulação
assim duas zonas, a linear onde a resultante é uma onda sinusoidal e a de
modulação na qual o resultado se assemelhará a uma onda quadrada.
Razão óptima entre o índice de modulação de frequência e o índice de
Modulação com Adição de Harmónicos
A modulação PWM sinusoidal tem desvantagens no que toca ao desaproveitamento
ensão do barramento, pois a tensão de saída será sempre menor do que a de entrada, est
abordagem de método torna mais eficiente o aproveitamento.
ão adicionados harmónicos triplos à referência sinusoidal de tensões compostas, uma vez
ma trifásico em estrela os anula, a adição de 1/6 de harmónicos de 3ª
onda modulada tem como efeito a redução do valor de pico da resultante por um
0,87 sem modificar a amplitude da fundamental
(a). Desta forma assim para aumentar o factor de utilização da
o indesejável (harmónicos pares) este conteúdo
ao índice de modulação
assim duas zonas, a linear onde a resultante é uma onda sinusoidal e a de
modulação na qual o resultado se assemelhará a uma onda quadrada.
Razão óptima entre o índice de modulação de frequência e o índice de modulação [13].
armónicos
A modulação PWM sinusoidal tem desvantagens no que toca ao desaproveitamento
ensão do barramento, pois a tensão de saída será sempre menor do que a de entrada, esta
nusoidal de tensões compostas, uma vez
6 de harmónicos de 3ª
a resultante por um
sem modificar a amplitude da fundamental, como pode ser
(a). Desta forma assim para aumentar o factor de utilização da

23
tensão do barramento a fundamental passa a ter um valor de pico de 1,15, que somando com
o harmónico, a resultante será 1, assim um acréscimo da tensão de saída, como ilustrado na
Figura 3.7 (b) [14].
Figura 3.7 - Distorção harmónica: (a) Referência da soma da fundamental com 1/6 do harmónico de frequência tripla; (b) Referencia já com o acréscimo da componente fundamental [14].
3.3.3. Modulação Vectorial
A técnica de modulação vectorial foi desenvolvida para a análise de máquinas
eléctricas de corrente alternada. É a mais sofisticada e com melhores resultados, ao nível de
eficiência, é injectado um menor conteúdo harmónico, gerando assim menores perdas
melhorando o aproveitamento da tensão do barramento CC, tornando a utilização da fonte
mais eficiente.
A sub-modulação é valida enquanto o resultado de ∗ sejam módulo menor ou igual ao
círculo, o que significa que é possível aproveitar 97,07% da tensão do barramento, baseia-se
na conversão, aplicando a transformada de Clark e Park, do sistema trifásico, das correntes a-
b-c para um referencial α-β, na equação 2.3, fica:
∗ = ! $! %" =
 −
−
0√&
−√&
$ %! ! (! & (3.3)

24
O resultado, ∗ é associado ao estado próprio de comutação do inversor, de acordo com a
Figura 3.8, esta exemplifica o princípio da área de sub-modulação e a implementação das
ondas de PWM trifásicas. Todos os oito vectores podem ser desenhados num hexágono, o
comando para as ondas sinusoidais trifásicas pode ser representado pelo vector ∗, a rodar no
sentido anti horário com a velocidade angular igual na frequência das ondas de saída. Para
uma certa localização do vector ∗, os 3 mais próximos vectores podem ser usados numa
base de tempo, de forma que o valor de média seja ∗, isto é:
∗ ∗ = . ' + . '( + ( ∪ )) (3.4)
Onde:
= ' + '( + ' (3.5)
E:
= 2. (3.6)
Figura 3.8 – Esquema da modulação vectorial [5].
3.4. Técnicas de Controlo
Avanços recentes na electrónica de potência e na tecnologia de microcontroladores
tornou possível desenvolver tecnologias sofisticadas para o controlo de motores de indução
como por exemplo o Sensorless, DTC. (Direct Torque Control) e FOC (Field Oriented
Control). Apesar disto a técnica mais usada continua a ser a tensão/frequência constante [15].

25
3.4.1. Tensão/Frequência Constante
Este é o método de controlo mais simples, é usado em situações onde a velocidade e a
precisão de controlo não sejam determinantes, como o caso de ventiladores, bombas, etc.
Desta forma não se adequa ao uso em aplicações que requeiram performances dinâmicas
mais elevadas, tanto no tempo de resposta como em baixas velocidades. Na Figura 3.9 temos
os blocos constituintes, usando apenas uma variável de velocidade como comando, é variada
a frequência e a tensão com uma determinada razão, mantendo assim o fluxo constante como
demonstra a equação 2.7. Num controlo efectuado em malha aberta, um aumento da carga irá
afectar a dinâmica, reduzindo a velocidade de rotação. A resposta dinâmica típica é
apresentada na Figura 3.10 conforme a referência usada.
Figura 3.9 - Blocos típicos V/F.
Figura 3.10 - Resposta dinâmica em Binário (PU) x velocidade [4].
A densidade de fluxo (() da máquina de indução é directamente proporcional a tensão de
alimentação (!) e inversamente proporcional a frequência (), como demonstra a equação
3.7. Desta forma para manter constante o fluxo, a tensão de controlo tem de ser ajustada de
forma proporcional a frequência. Caso a densidade de fluxo aumente em demasia dá-se o
efeito de saturação originando altas correntes de excitação, causando perdas por aquecimento,
afectando o binário e a performance. O binário () é directamente proporcional à Potência
Mecânica (*) e à velocidade angular (*) como demonstra a equação 3.8, e a potência
directamente proporcional ao binário () e ao número de rotações por minuto conforme
expresso na equação 3.9.

26
Φ =+
, (3.7)
= (3.8)
= . 260 (3.9)
3.4.2. Field Oriented Control
Nos tipos de controlo mais comuns existem diversas variantes, o mais elaborado ao qual
também é comum de ser chamado de controlo vectorial é o controlo orientado por campo
FOC, (field oriented control) [4]. Consiste em tornar o fluxo do rotor da máquina em apenas
uma variável as correntes de fase, tornando assim a máquina trifásica dinamicamente igual a
uma de corrente contínua. A resposta dinâmica em velocidade e binário são o de mais
avançado, em termos de rapidez e controlabilidade, como a Figura 3.12 expressa, a resposta
em binário de acordo com a velocidade do motor.
O cerne do controlo deste tipo de accionamento é um modelo activo aplicado actualizado
continuamente de acordo com as características eléctricas da máquina de acordo com o
processo da Figura 3.11. O processo de controlo é o seguinte:
• Cálculo em tempo real da produção de binário segundo a corrente, da seguinte forma:
- Armazena em memória as constantes/modelo da máquina.
- Mede a corrente e a tensão em cada fase.
- Mede ou calcula a velocidade.
• O controlador de velocidade compara o feedback com a velocidade pretendida, sendo
o erro aplicado no controlador de binário, de forma a este compensar o desequilíbrio.
• O controlador de binário é implementado comparando o binário através do feedback
da corrente e velocidade, o resultado providencia os comandos para o controlador do
PWM.
O modelo da máquina pode ser obtido de uma forma directa ou indirecta. Na forma directa os
parâmetros inseridos são os genéricos dependendo da potência e topologia da máquina,
enquanto a indirecta estes mesmos parâmetros são lidos através dos sensores e calculados
através dos estimadores, de forma a obter o modelo exacto, pois com a longa vida útil da
máquina estes vão se alterando [16].

27
Figura 3.11 - Blocos típicos do Field Oriented Control.
Figura 3.12 - Resposta de Binário (PU) x Velocidade [4].
3.5. Semicondutores de Potência
A construção de um inversor é um processo moroso e de grande complexidade, dai cada
vez mais o mercado ofereça soluções integradas que permitem poupar tempo e dinheiro. Na
Figura 3.13 pode-se ver um exemplo da robustez e integração no caso de uma drive que pode
ir até as centenas de kW, trata-se de uma solução integrada preparada apenas para receber o
sistema de controlo. As marcas diferenciam as drives para o tipo de usos: veículos, aplicação
em energias renováveis, etc. Cada uma com a sua mais-valia, que no primeiro caso passa por
uma grande robustez de forma a aguentar as vibrações, preparação para receber refrigerações
a liquido e no segundo grande eficiência energética [17]. Na Figura 3.13 b), temos o aspecto
interior de uma drive já integrada na Figura 1.1 a).
Figura 3.13 - Drives; a) Ponte trifásica, b) Barramento das ligações internas das pastilhas [17].
28
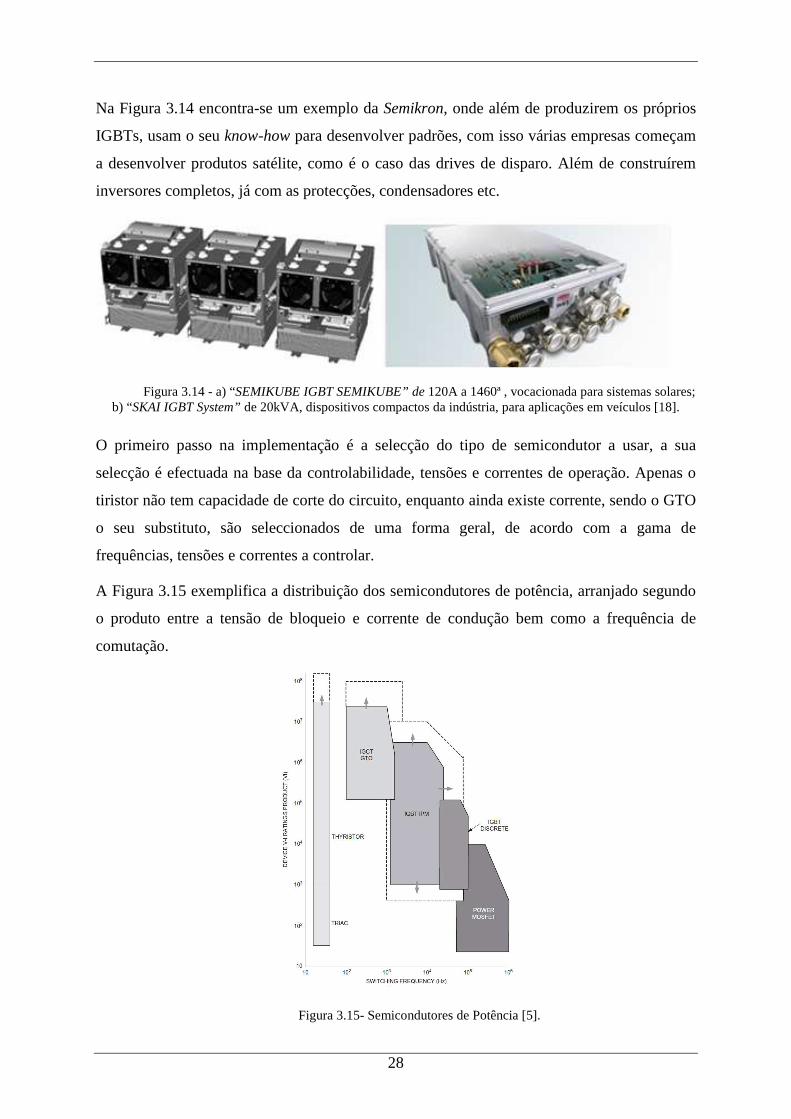
Na Figura 3.14 encontra-se um exemplo da Semikron, onde além de produzirem os próprios
IGBTs, usam o seu know-how para desenvolver padrões, com isso várias empresas começam
a desenvolver produtos satélite, como é o caso das drives de disparo. Além de construírem
inversores completos, já com as protecções, condensadores etc.
Figura 3.14 - a) “SEMIKUBE IGBT SEMIKUBE” de 120A a 1460ª , vocacionada para sistemas solares; b) “SKAI IGBT System” de 20kVA, dispositivos compactos da indústria, para aplicações em veículos [18].
O primeiro passo na implementação é a selecção do tipo de semicondutor a usar, a sua
selecção é efectuada na base da controlabilidade, tensões e correntes de operação. Apenas o
tiristor não tem capacidade de corte do circuito, enquanto ainda existe corrente, sendo o GTO
o seu substituto, são seleccionados de uma forma geral, de acordo com a gama de
frequências, tensões e correntes a controlar.
A Figura 3.15 exemplifica a distribuição dos semicondutores de potência, arranjado segundo
o produto entre a tensão de bloqueio e corrente de condução bem como a frequência de
comutação.
Figura 3.15- Semicondutores de Potência [5].

29
3.6. Frenagem
A frenagem consiste em converter a energia cinética em outro tipo de energia, de forma ao
sistema desacelerar ou parar. Quanto maior for a massa ou velocidade, maior é a energia, esta
pode ser efectuada de duas formas, mecânica, eléctrica ou uma combinação das duas. O
processo pode ser resistivos e ou regenerativo, a energia em vez de ser dissipada na forma de
calor, é absorvida por um sistema que a armazena com a possibilidade de a reutilizar.
Electricamente pode ser efectuada de duas formas, resistiva quando não há aproveitamento da
energia e esta é dissipada sobre a forma de calor, ou regenerativa quando existe
reaproveitamento [19].
Mecanicamente a travagem é efectuada, através de travões, consistindo em aumentar as
forças de atrito (ex: travões de disco) convertendo energia em calor. De uma forma
regenerativa, a inércia pode ser armazenada num sistema de pressão, exemplo disso o sistema
KERS (Kinetic Energy Recovery System) adoptado pela FIA (Federação Automóvel
Internacional) na F1 ou em uma flywheel. Na Figura 3.16, figuras dos exemplos descritos.
Figura 3.16 - Mecanismos de frenagem, a) Travão de disco, b) KERS mecânico, c) Flywheel [20][21][22].
3.6.1. Frenagem com Corrente Continua
O princípio básico desta técnica consiste em injectar corrente contínua nos
enrolamentos do estator criando um campo magnético estacionário. No caso do accionamento
trifásico uma das fases é desligada enquanto as outras duas através de PWM (de forma a
haver controlabilidade sobre o binário da travagem) controlam a magnitude e duração da
corrente contínua, de acordo com a Figura 3.17. O efeito acontece quando as barras do rotor
cortam o campo, produzindo uma corrente de magnitude e frequência proporcional à

30
velocidade, dando origem a um binário contrário e proporcional á velocidade. A energia de
travagem é então dissipada no rotor gerando calor. É pouco usual devido a estar limitada á
capacidade de aquecimento do motor é ideal em motores com altos binários de arranque.
A B
A
B
Figura 3.17 - Ligação em paralelo dos enrolamentos em triangulo e estrela respectivamente.
3.6.2. Frenagem com Contra Corrente
A frenagem contra corrente consiste, basicamente na inversão da marcha do motor, é
executada invertendo o sentido de rotação do campo girante. Para isso é necessário trocar
duas das fases de alimentação do motor. Tem o inconveniente da corrente ser muito alta,
podendo, danificar o próprio motor, caso movimente uma inércia elevada. Ao atingir a
velocidade zero é necessário desconectar a alimentação. Na Figura 3.18 o gráfico do processo
sendo o binário de movimento a resultante entre os dois binários oposto (binário da travagem
e o binário do movimento.
Figura 3.18 - Gráfico do Binário e velocidade.

31
3.6.3. Frenagem Dinâmica
Electricamente, a máquina é temporariamente controlada como um gerador, a energia
é enviada através da electrónica de potência novamente para a fonte. Não podendo ser
entregue a uma fonte e ao ser absorvida apenas pelo barramento CC, fará a sua tensão subir
até níveis limite, sendo necessário o descarregamento, este é efectuado por meio de uma
resistência ou módulos de travagem dinâmica. Na Figura 3.19 a) um exemplo de uma
resistência, na b), exemplo do aumento de tensão do barramento e o processo consequente.
Figura 3.19 - Travagem dinâmica; a) Resistência, b) Aumento da tensão no barramento CC [7][23].
3.7. Frenagem Regenerativa
Do ponto de vista do inversor, a travagem regenerativa é obtida da mesma forma que de
uma travagem dinâmica. Com auxílio da electrónica de potência é reduzida a frequência de
alimentação da máquina para uma inferior á velocidade actual do rotor, passando assim a
desenvolver binário negativo, funcionando como gerador. Na Figura 3.20 ilustra-se o
processo de redução de velocidade através da redução da frequência.
Figura 3.20 - Diminuição da frequência de alimentação de fo para f1 [7].

32
Neste caso a energia é aproveitada, injectada na rede ou armazenada sobre forma de energia
mecânica (flywheel, hidráulico…), química (baterias) ou eléctrica (condensadores, super-
condensadores), elevando assim a eficiência global do sistema. Na Figura 3.21 exemplos de
sistemas de armazenamento.
Figura 3.21- Exemplos dos mais avançados sistemas de armazenamento comercialmente disponíveis; a) e b) Super-condensadores, c) Condensador, d) bateria continental [24][25][26][27].
Para qualquer sistema é necessário avaliar um conjunto de opções, e fazer uma análise sobre
a média de energia gerada, picos de potência e suas durações. Deste estudo resultará a
quantidade de energia com potencialidade de ser aproveitada. Para obtermos valores
concretos de forma a ser possível na análise seleccionar e dimensionar os mecanismos mais
vantajosos, é necessário analisar nos seguintes parâmetros de um sistema:
• Quantidade de energia armazenada no sistema, sobre a forma de energia cinética,
sobre a forma, rotacional ou linear:
Rotacional, no caso de uma massa rotacional, onde é o momento de inércia
em kg. e “” a velocidade angular em , a energia armazenada:
) = 12 . . (3.10)
Linear, caso de uma massa com um deslocamento linear, onde * é a massa em +, e ! a velocidade em /, a energia armazenada:
) = 12 . . ! (3.11)
• As taxas e tempos de aceleração e desaceleração.
• Proporção da energia consumida por sistemas vizinhos, logo transmitida a esses
mesmos.
• Topologia da rede/sistema a aplicar o aproveitamento.

33
3.7.1. Drives com Frenagem
A remoção de energia do barramento CC pode ser efectuada com a devolução à sua
fonte, por exemplo, á rede. Para este tipo de situações comercialmente podem ser aplicadas as
“active front end drive” ou uma “regeneration unit” onde são aplicados semicondutores
completamente controlados ou então pontes rectificadoras a tiristores [28][29].
A “Active Front end Drive” consiste numa drive em que no estágio de rectificação possui
semicondutores controláveis em anti-paralelo: em suma dois inversores, um para rectificar e
controlar o fluxo de potência para o barramento CC e o segundo responsável pelo controlo do
processo de devolução de energia à rede, representado na Figura 3.22. Este tipo de drive é
usado em situações onde o funcionamento como gerador compensa o investimento, como por
exemplo a paragem de cargas de grande inércia como também por uma questão de qualidade
de energia, absorver corrente com uma taxa de distorção harmónica muito reduzida de 25-
30% de um rectificador e até mesmo aumentar o factor de potência [7].
Normalmente são usados rectificadores de 6 pulso (díodos ou tiristores) o que traz a
desvantagem de injectar harmónicos ímpares como o 5º, 7º, 11º, 13º etc.
Ao mitigar o conteúdo harmónico, evita problemas resultantes do sobre aquecimento de
motores e transformadores, destruição de condensadores responsáveis pela correcção do
factor de potência etc.
Figura 3.22 - Active Front end Drive [30].

34
A “Regeneration Unit” é ser composta apenas por um inversor ligado no barramento CC que
antes de a resistência entrar em condução injecta a energia na rede, basicamente é um módulo
de expansão. A Figura 3.23 representa a forma de ligação típica do “1336 REGEN” da
“Rockwell Automation”, este é conectado directamente ao barramento CC do inversor.
Figura 3.23 – Esquema de ligação da “1336 REGEN” da Rockwell Automation [31].
Estes equipamentos funcionam sincronizados com a rede de forma a poderem fazer a
injecção da energia. A Figura 3.24 a) exemplifica a injecção de energia na rede eléctrica, e a
Figura 3.24 b) exemplifica a absorção da energia por parte da carga. Para haver transferência
de energia a tensão no lado da carga tem de ser maior do que a da rede, de forma a corrente
possa fluir nesse sentido e a corrente em oposição de fase, desfasada, neste caso de 180º por
se tratar de potência activa.
Figura 3.24 - Transferência de potência: a) da carga para a rede; b) da rede para a carga.

35
3.7.2. Pontes SCR
As pontes a SCR são especialmente usadas em aplicações de grande potência, como é o caso
das locomotivas.
A tensão no barramento CC sobe a um nível superior à do valor de pico da tensão de
alimentação. A ponte SCR funciona como um inversor, com o ângulo de disparo maior do
que 90º e com tensão negativa no barramento CC, esta é a razão para a ligação em
antiparalelo com os díodos.
Na solução da Figura 3.25, apenas com uma ponte de tiristores a regeneração é apenas
possível na medida em que a polaridade do barramento seja trocada, o que pode acontecer por
meio electromecânico, com auxílio de relés ou mesmo de semicondutores. Outra solução
adoptada é a da Figura 3.26, usadas duas pontes rectificadoras a SCR, tornando a transição
mais rápida. A comutação natural é aplicada a estes dois casos anteriores, pois desde que a
tensão no barramento CC seja maior do que o valor médio da fonte CA.
Figura 3.25 - Ponte com dispositivo de inversão de polaridade [32].
Figura 3.26 - Ponte dupla rectificadora e inversora a tiristores [32].
36
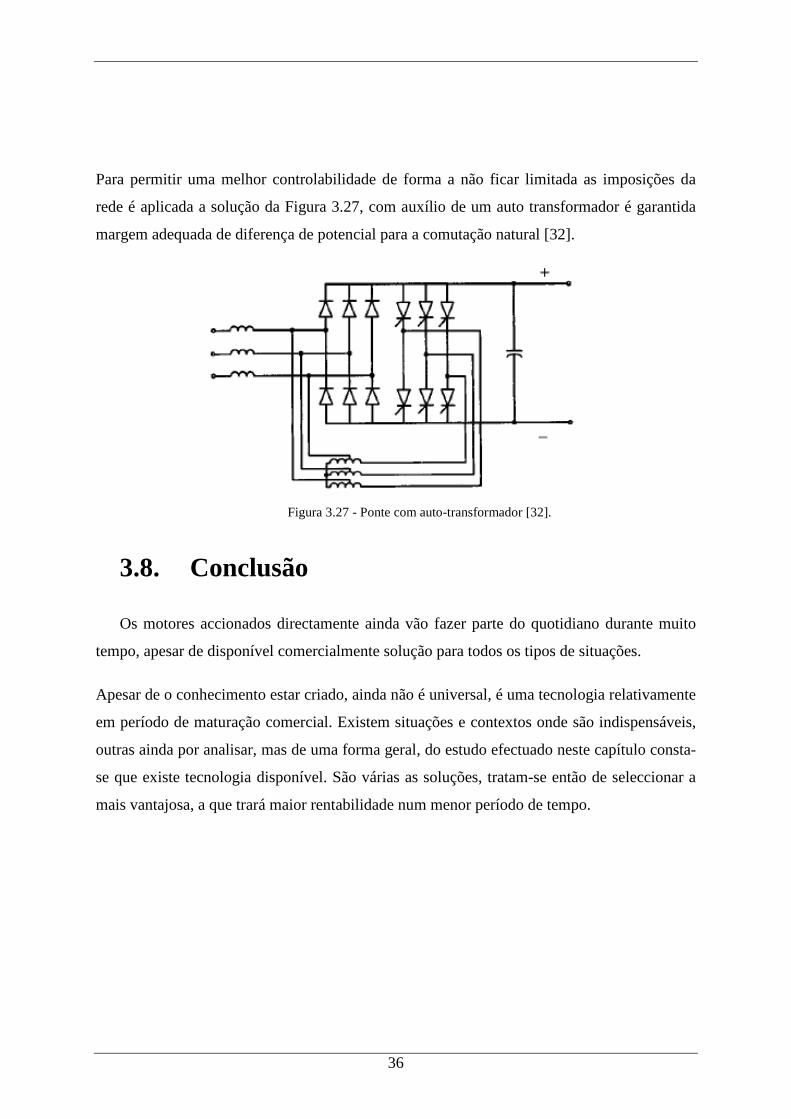
Para permitir uma melhor controlabilidade de forma a não ficar limitada as imposições da
rede é aplicada a solução da Figura 3.27, com auxílio de um auto transformador é garantida
margem adequada de diferença de potencial para a comutação natural [32].
Figura 3.27 - Ponte com auto-transformador [32].
3.8. Conclusão
Os motores accionados directamente ainda vão fazer parte do quotidiano durante muito
tempo, apesar de disponível comercialmente solução para todos os tipos de situações.
Apesar de o conhecimento estar criado, ainda não é universal, é uma tecnologia relativamente
em período de maturação comercial. Existem situações e contextos onde são indispensáveis,
outras ainda por analisar, mas de uma forma geral, do estudo efectuado neste capítulo consta-
se que existe tecnologia disponível. São várias as soluções, tratam-se então de seleccionar a
mais vantajosa, a que trará maior rentabilidade num menor período de tempo.

37
Capítulo 4.
Simulação do Inversor com Frenagem Regenerativa
O uso de ferramentas de simulação é fundamental para a investigação e desenvolvimento,
permite simular em ambientes computacionais sistemas de elevada complexidade, sendo o
ajuste de parâmetros mais seguro e eficaz, diminuindo tempo e custos de desenvolvimento. O
software PSCAD/EMTDC da “The Manitoba HVDC Research Centre” é um exemplo entre
várias ferramentas de simulação de sistemas de electrónica de potência, este através de um
interface gráfico amigável implementa o algoritmo computacional EMTDC (ElectroMagnetic
Transients including DC) para a resolução dos modelos.
Permitir o preenchimento de funções, parâmetros por parte do utilizador, torna mais
aproximado a um sistema real e ao facto de ser flexível, foi esta a ferramenta escolhida.
Este capítulo apresenta as simulações do circuito de potência, a configuração aplicada e o
sistema de controlo. No final são apresentados os resultados para os diferentes regimes de
funcionamento. A Figura 4.1 apresenta o aspecto do ambiente de trabalho do programa.
Figura 4.1 - Aspecto visual do PSCAD/EMTDC.

38
4.1. Modelo de Simulação do Circuito de Potência
Na Figura 4.2 são apresentados os elementos do circuito de potência agrupados por
blocos, capaz de fazer o accionamento da máquina trifásica como motor e armazenar a
energia aquando do funcionamento como gerador na sua frenagem.
Figura 4.2 - Circuito de potência.
A fonte é tensão sinusoidal monofásica com o valor eficaz de () 230V/50Hz
rectificada por meio de uma ponte completa a díodos de forma a converter esta tensão
alternada numa contínua com um valor de 325V. O cálculo do valor é obtido através da
equação 4.1 num circuito em vazio.
= .√2 (4.1)
Para efeitos de protecção é colocada uma resistência de carregamento do barramento CC, que
é curto-circuitada por meio de um contacto temporizado, quando o condensador atinge a
carga de funcionamento de forma a evitar um grande pico de corrente. Como se pode analisar
pela equação 4.2 o valor da resistência () pode ser obtido pela divisão constante de tempo (-
em segundos), e a capacidade (. /) do barramento. Quanto maior for tempo de
carregamento maior é o valor da resistência, considerando o condensador com carga zero,
temos então o valor da corrente máxima (-) a ser fornecida conforme a equação 4.3 [33].
= -0 (4.2)
- = .. (4.3)

39
A resistência de travagem (1) é accionada pelo IGBT por meio de um comparador com
uma tensão de referência. É este dispositivo que controla o valor de tensão no barramento CC
para que não seja atingido o valor de tensão de ruptura dos condensadores.
O cálculo aplicado pela associação Rockwell Automation considera que o binário de travagem
tipicamente fixa-se na gama dos 100% aos 150% do nominal do motor, sendo este valor
função da resistência de travagem. Quanto maior for o binário de travagem menor a
resistência e tempo de travagem e maiores as correntes. Para o cálculo usam-se as equações
4.4, 4.5 e 4.6 [10]:
1 - P() = P(.). 745.69 (4.4)
2 - P = P() . Binário de travagem (4.5)
- 1.0 Para 100%
- 1.5 Para 150%
3 - Resistência (Ω) =/0"1ã3 4566570"83 99 (:)
;38ê"=>5 ?0 ;>=3 () (4.6)
O barramento CC é composto por um condensador que armazena a energia proveniente da
frenagem. A energia armazenada depois de uma travagem é dada pela equação 4.7:
) =
... ( − ) (4.7)
O inversor utilizado nestas simulações é um inversor tipo fonte de tensão de dois níveis, é
modelizado usando IGBTs.
O modelo usado é a máquina de indução trifásica, disponível na biblioteca de software
PSCAD/EMTDC. Os valores da tensão, corrente, potência e velocidade de rotação usados
nestas simulações foram retirados da placa do motor utilizado posteriormente na
implementação prática. Na Figura 4.3, em baixo é apresentado os campos preenchidos.

40
Figura 4.3 - Campos preenchidos no modelo da máquina de indução.
4.2. Sistema de Controlo
O modelo de simulação do controlo representado na Figura 4.4 é uma derivação da
estratégia de controlo V/F em malha fechada e através de um controlo PI, compara a
velocidade de referência “w_ref” com a velocidade da máquina “w_motor”, ajustando assim a
sua saída.
Figura 4.4 - PI do controlo V/F.
O controlo PI (proporcional e integrativo) é uma junção de dois tipos de controlo, o
proporcional, que tem como principal função fazer com que o processo siga o sinal de
referência com erro nulo, e a integral, que integra o erro tornando as variações da saída mais
suaves, diminui o erro em regime permanente mas torna o sistema mais lento. Com a
implementação da simulação torna-se evidente que é possível implementar este tipo de
controlo com resultados satisfatórios, pois as equações que regulam a sua resposta são

41
relativamente simples, equação 4.8.
' = 2 3' +
#4 (-)
5 (4.8)
A sintonização deste controlador é baseada no ajuste das constantes de ganho proporcional
“2” e ganho integral “2”, que são generalizadas para um tipo de motor pelos construtores
de drives pois o método aconselhado baseia-se nas características da máquina a controlar. É
de referir que este tipo de aproximação é justificado aquando da aplicação em processos onde
a controlabilidade óptima é exigida, pois melhora a sua resposta dinâmica e eficiência
[34][35]. No caso deste trabalho foi aplicado o método de afinação por tentativa erro.
A variável de controlo “w_ref” e com perturbação referente a velocidade do rotor como saída
teremos “rampa_VF” os valores de tensão e frequência. A selecção dessa perturbação é
efectuada com recurso a uma comparação que selecciona “w_motor” aquando do
funcionamento como motor (velocidade de referencia maior do que a velocidade do rotor) e
“w_travagem” aquando da frenagem da máquina (velocidade de referencia maior do que a
velocidade do rotor na Figura 4.5, o controlo simplificado
Figura 4.5 - Esquema simplificado do controlador.
A rampa V/F representada na Figura 4.6 (“rampa_VF”) será a entrada do sistema e por
consequência tomará os valores para a tensão e frequência a serem aplicados nos
enrolamentos do motor.
Figura 4.6 - Rampa V/F.

42
Esta é aplicada como entrada de uma rampa (V/F) com offset, como saída tomará valores para
a frequência e tensão, é sempre mantida constante a velocidade de mudança do valor de
saída, este é definido como a aceleração. O offset é usado devido a indutância do motor ser
zero no momento de ligação do sistema é também designada por “torque boost” [36] [37].
A frequência de base e tensão usadas na simulação são as mesmas do motor usado na
implementação prática.
Finalmente o sinal é convertido em PWM que controla a lógica e sequência de comutação dos
semicondutores. As leituras efectuadas correspondem para efeitos de análise, no caso da
corrente Id1, para efeitos de consumo, regeneração da energia e providencia uma protecção da
drive e do motor. A tensão no barramento CC é medida, para efeitos práticos de cálculo de
energia armazenada e simulação do barramento CC.
4.2.1. Simulação da Técnica de Comutação
A técnica de modulação utilizada é a PWM sinusoidal bipolar. O seu funcionamento é
implementado na Figura 4.7 onde o bloco “signalgen” cria o sinal de portadora, ou seja uma
onda triangular com uma frequência de 15 kHz, os blocos “modulator” geram
respectivamente 3 ondas sinusoidais desfasadas de 120º conforme o sistema trifásico e têm
como variáveis de entrada a amplitude e a frequência. As duas ondas são comparadas no
bloco “compar” a saída será lógico “1” quando a onda sinusoidal é menor que a onda
triangular e lógico “0” quando maior, o resultado, impulsos de duração variável. Cada saída é
ligada ao braço respectivo do inversor sendo a positiva para o IGBT de cima e a negada “inv”
para o IGBT de baixo, o diagrama na Figura 4.7.

43
Figura 4.7 - Modelo de simulação do PWM bipolar.
4.2.2. Controlo da Simulação.
Para simplificar a simulação é definida a carga do motor e a referência de velocidade
para os determinados períodos da simulação, de forma aos vários testes serem efectuados
com as mesmas características. Para isso foi implementado um sistema automático de
selecção de velocidade e carga, como se pode ver na Figura 4.8.
Figura 4.8 - Sistema de selecção de velocidade e carga do motor.

44
4.3. Resultados das Simulações
Os resultados das simulações do sistema composto pelo sistema de accionamento, motor
e carga são mostrados neste subcapítulo. O objectivo é a verificação da reacção do sistema
para os vários regimes de funcionamento. Os regimes de funcionamento são basicamente os
descritos no capítulo 4.3.2.
Os resultados serão apresentados sobre a forma de gráficos, compostos pelas tensões simples
(va, vb e vc), corrente nas fases (ia, ib e ic), tensão contínua do barramento CC (V), corrente
continua do barramento CC (I), o binário exercido pelo motor (B) e sua respectiva velocidade
(v).
O regime de operação é composto pelo arranque da máquina até atingir a sua velocidade
nominal, sendo posteriormente, reduzida a velocidade até zero. Os valores na simulação são
mostrados e explicados.
Na Figura 4.9 a referência (“w_ref”) do sistema sendo o gráfico “recta” em termos práticos a
“ rampa_vf” referenciada no subcapítulo 4.3 que será de actuação para a frequência e
amplitude. Este gráfico representa o subcapítulo anteriormente referido.
Figura 4.9 - Sinais de controlo. Recta – Valor V/F; f – frequência; w_motor – velocidade angular do motor (rad/s); w_ref – velocidade referência do motor; w_travagem – variável de input aquando da travagem.

45
A Figura 4.10 apresenta as potências eléctricas do sistema e o factor de potência do motor.
Como se pode referenciar, quando a velocidade é reduzida, o factor de potência torna-se
convencionalmente negativo assim como o deslizamento, a velocidade do campo é inferior a
velocidade do rotor. É constatado também o baixo factor de potência com o motor a
funcionar fora da sua velocidade nominal, este aumenta quando esta é atingida e diminui
novamente aquando da travagem.
A potência instantânea é também de valor negativo devido ao motor neste momento estar a
funcionar como gerador e a corrente fluir no sentido do motor para o barramento através dos
díodos presentes no inversor.
Figura 4.10 - Gráficos das potências, Activa (Pa), Reactiva (Q) e Aparente (S) e respectivo factor de
potência (Pf).
Na Figura 4.11 pode ser visto, o gráfico da corrente numa das fases em ordem ao tempo.
Pode ser constatado o elevado valor da corrente que é absorvida pelo motor na sua
aceleração, tornando-se mais baixo no funcionamento à sua velocidade nominal e voltando a
aumentar na redução da velocidade angular de campo.

46
Figura 4.11 - Corrente na fase "a".
Por fim na Figura 4.12 as correntes e tensões no barramento CC, sendo claramente
representado o aproveitamento efectuado da energia aquando da frenagem ou da redução da
velocidade.
Figura 4.12 - Tensão e Corrente no barramento CC. Icond – Corrente no condensador; ifonte –
Corrente da rede; Idc – Corrente de saída do barramento; Vdc1 – Tensão no barramento CC.

47
4.4. Conclusão
É possível efectuar a frenagem de forma regenerativa para o barramento CC neste tipo de
motor, mas não até ao linear da paragem. Isto deve-se as perdas de magnetização e ao
funcionamento da própria máquina.
O binário da travagem tem influência directa no tempo de paragem, desta forma, e caso o
tempo não seja uma variável funcional do processo, pode ser optimizado, tornando-o maior, e
assim convertendo de forma mais eficiente a energia. Para processos muito rápidos é
vantajoso agregar um banco de condensadores maior. Converter a energia mecânica em
eléctrica e transferindo a para o barramento é um processo possível e torna maior o
rendimento global.

48

49
Capítulo 5.
Implementação Pratica
Neste capítulo é abordada a implementação técnica da solução abordada. São descritas as
opções tomadas bem como o método para a sua implementação. Esta descrição está dividida
em duas partes, a implementação do andar de potência e a implementação do controlo e
respectiva programação associada, ou hardware/software. Em baixo na Figura 5.1 o aspecto
da bancada de trabalho.
Figura 5.1 - Aspecto global da bancada de trabalho.

5.1. Cir cuito de
O circuito de potência é composto pel
monofásica, banco de condensadores, inversor e a
mostra a Figura 5.2. Nos subcapítulos seguintes é desc
5.1.1. Máquina
O tipo de máquina eléctrica utilizada
com os seus enrolamentos são ligados em estrela
Devido ao alto conteúdo harmónico gerado é necessário para uma correcta visualização em
qualquer osciloscópio filtrar a o
aplicados entre as fases das ondas nos enrolamentos
acordo com a equação 5.1, atribuindo
condensador.
50
cuito de Potência
cia é composto pelo, auto-transformador, ponte rectificadora
monofásica, banco de condensadores, inversor e a máquina de indução
capítulos seguintes é descrita a implementação do sistema
Figura 5.2 - Circuito de potência.
quina Eléctrica Utilizada
eléctrica utilizada é o motor de indução trifásico de quatro pólos
s seus enrolamentos são ligados em estrela.
Devido ao alto conteúdo harmónico gerado é necessário para uma correcta visualização em
qualquer osciloscópio filtrar a onda de saída, para isso são dimensionados filtros
das ondas nos enrolamentos, estes sintonizados para os 120Hz
atribuindo um valor para as resistências obtêm
transformador, ponte rectificadora
a controlar, como
rita a implementação do sistema.
de indução trifásico de quatro pólos,
Devido ao alto conteúdo harmónico gerado é necessário para uma correcta visualização em
nda de saída, para isso são dimensionados filtros RC
sintonizados para os 120Hz, de
as resistências obtêm-se o valor do
(5.1)

51
5.1.2. Sistema de Alimentação
Com vista à segurança humana e material, na alimentação do sistema de potência é
usado um dispositivo de corte com sinal luminoso, Figura 5.3 a). Para reduzir a tensão e
correntes os testes são efectuados com o auxílio de um auto-transformador, Figura 5.3 b).
Figura 5.3 - a) Interruptor geral do circuito de potência. b)Auto-transformador.
Assim uma implementação mais prática e organizada de forma a simplificar o debug, o
sistema de alimentação composto por duas ligações de tensão alternada, uma proveniente do
auto-transformador protegida por um disjuntor de 5A e a outra de alimentação das fontes de
tensão contínua de +5V e +15V, isoladas, para alimentação dos circuitos de controlo, micro e
drive de disparo. Obtidas por meio de reguladores de tensão lineares, LM7805 e o LM7815
respectivamente. A implementação prática do circuito é descrita no datasheet, apenas foi
acrescentado um interruptor on/off e um led para informação visual [38]. Os condensadores
C2 e C1 servem para filtragem e são de 0,33µF e 0,1µF respectivamente de acordo com o
esquema da Figura 5.4.
Figura 5.4 - Esquema típico do regulador.

52
Os contatores, usados para o corte rápido do circuito de potência e shunt da resistência de
carregamento do barramento CC, respectivamente da esquerda para a direita de acordo com a
Figura 5.5.
Figura 5.5 - Fotografia do sistema de alimentação, constituído pelo disjuntor de curto-circuito fontes de tensão contínua de +5V e +15V, contadora de carregamento do condensador, e outra para ligar e desligar o
circuito de potência.
5.1.3. Barramento CC
O circuito do barramento é constituído por um rectificador monofásico, pelo banco de
condensadores e pelo grupo de resistências de equalização. Os díodos usados são fabricados
pela empresa “STMicroelectronics”, e são de 400V, 10A. Na Figura 5.6 o aspecto do filtro e
respectivos pormenores da sua construção.
Figura 5.6 - Rectificador com filtro e pormenor de construção do filtro.

53
De forma a implementar um sistema com uma capacidade equivalente aproximada do que foi
testado em simulação é implementado um conjunto série/paralelo de condensadores. Em série
para aumentar a tensão de operação do conjunto e em paralelo para aumentar a sua
capacidade equivalente, o esquema de ligação pode na Figura 5.7. Esta é a solução mais
eficaz, pois caso um condensador falhe ou entre em curto-circuito o condensador em série
não será afectado [39]. Para que as tensões sejam equilibradas, a corrente a passar pelas
resistências será de cerca de 10 vezes a corrente de fuga, distribuindo assim a tensão
uniformemente.
Como desvantagem a ligação em série acarreta a necessidade da aplicação de resistências de
equalização, devido aos condensadores não serem iguais (diferenças no fabrico e tolerâncias)
a tensão não será distribuída uniformemente por cada condensador.
Figura 5.7 - Ligação interna dos condensadores.
A equação 5.2 determina a capacidade equivalente:
.@ = 2.A.AABA
(5.2)
5.1.4. Protecção do Barramento CC
O módulo de protecção do barramento CC, pode ser considerado o travão dinâmico,
neste caso a ele é associado um controlo on/off de forma a proteger o barramento contra
tensões elevadas.
O sistema liga o circuito aplicando uma tensão de 15V na gate do IGBT de forma atingir o
estado de condução e descarregando a energia em excesso na resistência de potência. Para o
cálculo da resistência é aplicada a equação 4.6. Na Figura 5.8 a montagem.

54
Figura 5.8 - Aspecto do Travão dinâmico.
5.1.5. IGBTs
O IGBT combina a característica de condução dos transístores bipolares e a alta
impedância do controlo dos MOSFETs, sendo assim activo por tensão, não sendo dependente
de uma alta corrente de polarização, suportando maiores potências que os FETs. Desta forma
o IGBT pode ser visto como um transístor bipolar accionado por um MOSFET, é assim visto
como um elemento híbrido. A tensão de limiar de condução (threshold) é tipicamente de 4V e
necessita de uma tensão na gate de 10V a 15V para entrar em condução, o tempo de entrada
em condução varia mas pode ser na ordem dos µs sendo o tempo de corte normalmente o
dobro, quando aplicado 0V, ou uma tensão negativa na gate acelerando assim o corte.
As grandes vantagens deste dispositivo são a sua boa capacidade para operar em zonas de
média potência e alta frequência, as suas baixas perdas em condução, suporta tensões maiores
do que o seu grande concorrente que é o MOSFET. As drives deste interruptor de potência
são mais simples devido as baixas correntes na gate.
Os díodos de comutação (freewheel) são necessários para desviar a corrente indutiva de
descarga da bobine quando o semicondutor não está a condução. Caso os díodos tenham um
restabelecimento lento, fluirá uma corrente de curto-circuito. Utilizam-se então díodos
rápidos com lenta carga de restabelecimento, estes são colocados entre o emissor e o colector,
como pode ser visto na Figura 5.9 c).

55
Figura 5.9 - a) Circuito equivalente do IGBT; b) Símbolo; c) com doido de freewheeling.
O inversor implementado poderá operar com uma potência aparente de 5kVA, e a tensão de
alimentação será monofásica (tensão com um valor eficaz de 230V), rectificada a tensão
máxima será de 325,27V (equação 5.3), e a corrente a que cada IGBT irá fornecer será de 9A
(equação 5.4), este serão os valores nominais de funcionamento tensão na equação 5.3 e
corrente na equação 5.4.
- = V0C>=5D.√2 = 230.√2 ≈ 325,27V (5.3)
- =
E
=F
&F,)= 15,37 (5.4)
A partir destes valores foram seleccionados IGBTs discretos com díodos freewheeling cuja
referência é a “HGTP12N60A4D” fabricados pela “Fairchild Semiconductors”. Estes IGBTs
foram escolhidos devido ao facto da sua corrente nominal ser o dobro, da necessária norma
usada para uma boa durabilidade do semicondutor. O encapsulamento é o TO-220AB (Figura
5.10) as suas características nominais são as seguintes:
Tensão colector emissor Vce : 2,7V
Tensão de ruptura colector emissor : 600V
Encapsulamento: : TO-220
Tempo off: : 18ns
Temperatura de potência Max: : 25ºC
Corrente continua Max: : 54A
Potência dissipada Pd: : 167W
Corrente de Curto-circuito: : 96A
Tempo on: : 8ns
Polaridade do transístor : N
Figura 5.10 - Encapsulamento TO-220.

56
5.1.6. Circuito Snubber
O circuito Snubber é um circuito de protecção (ou de amortecimento) que permite
aumentar a performance dos interruptores electrónicos, reduzindo ou eliminando picos de
tensão ou de corrente bem como melhorar o ! ' e o ' , reduzindo assim o stresse de
comutação e as perdas, prolongando desta forma a vida útil do semicondutor.
Figura 5.11 - Formas de onda nas comutações aos terminais do IGBT durante as comutações [40].
Existem vários tipos de snubber, cada um com a sua aplicação típica e dependendo do
momento em que se quer proteger o interruptor de potência para o momento em que o IGBT
liga, turn-on ou desliga, turn-off como descrito na Figura 5.12 [41].
Figura 5.12 - Tipos de Snubbers(a) RC; (b) Supressor de carga e descarga RCD; (c) Supressor de descarga; (d)
C; (e) RCD [41].
O circuito de snubber mais utilizando consiste num condensador conectado entre os terminais
do IGBT. É o mais simples e protege contra sobretensões sendo típico em aplicações de

57
média e baixa potências, o condensador a utilizar nestes casos pode ser na ordem dos 0.1uF e
2uF [42].
O condensador seleccionado no âmbito deste projecto é um condensador da empresa
“EPCOS” o “B32921C3473M” em polipropileno com baixo ESR (Equivalent Séries
Resistance) e ESL (Equivalent Series Inductance). Foi desenvolvido para respostas em altas
frequências com uma tensão de ruptura de 400V e capacidade de 0.1uF, na Figura 5.13
podemos o seu aspecto [43].
Figura 5.13 - Condensador em polipropileno da empresa EPCOS.
5.1.7. Circuito de protecção dos IGBTs
Este circuito é desenhado para minimizar o mau funcionamento da drive, causado
pelo ruído electromagnético ou oscilações de sinal assim é necessário colocar o circuito o
mais próximo do semicondutor possível.
A resistência GH garante 0V quando o driver manda desligar o IGBT, descarregando o
condensador de miller. Os díodos zener protegem a gate contra sobre tensões do lado da drive
e do lado de potência em casos de curto-circuito a tensão da gate tende a aumentar sendo
assim descarregada. O condensador .GH é usado como filtro de desacoplamento, e serve para
suavizar os impulsos de tensão, removendo os sinais de alta frequência, na Figura 5.14 uma
montagem típica para protecção [44].
Figura 5.14 - Ligação da gate do IGBT [44].

58
5.2. Inversor
A implementação de um inversor é o elemento central no desenho de um circuito de
drive, pois trata-se do componente principal. Este íntegra cada vez mais componentes: além
dos semicondutores de potência, cada vez mais são adicionados dispositivos auxiliares,
dispositivos de protecção da gate, circuitos snubber, drives de disparo.
A razão para este aspecto tem a ver com a integração tornando-os mais pequenos, robustos e
simples, com o facto de todos os problemas associados a um circuito electrónico de altas
frequências que têm um impacto directo no aumento das indutâncias e consequente ! '
criando correntes induzidas nos circuitos vizinhos. É crucial desenhar as pistas desde a saída
do microcontrolador com o mínimo de malha possível de forma manter a indutância baixa
pois em cada ciclo é gerado um pico de tensão, causando problemas interferências
electromagnéticas. Uma imagem da aplicação dos IGBTs discretos de uma forma simples e
funcional pode ser vista na Figura 5.15 e na Figura 5.16, pormenores de construção [40].
Figura 5.15 - Fotografia da parte de baixo do inversor.

59
Figura 5.16 – Pormenor da construção do inversor, barramento +Vcc, Gnd e pistas de tensão alternada. Podem ser vistos também os supressores de tensão.
5.3. Circuito de Drive dos IGBTs
O circuito de drive dos IGBTs é um circuito de interface entre os sinais de controlo e os
IGBTs. Para este tipo de aplicação o projecto destes circuitos tem de ter em conta o
isolamento eléctrico e a controlabilidade. O aspecto do circuito pode na Figura 5.17 Figura
5.19.
Neste tipo de circuitos em ponte, existem 4 pontos de referência (massas eléctricas), 1 para os
dispositivos com o emissor conectado no mesmo ponto e 3 para cada um dos IGBTs
superiores, pois tem os seus emissores conectados a potenciais de referência diferentes.
No âmbito desta aplicação podem ser utilizados transformadores de impulso, optoacopladores
e circuitos de gate dedicados [45]. A selecção caiu sobre este último, devido à imunidade ao
ruído, rapidez e complexidade reduzida. No caso do IR2130 da International Rectifier, este
cria 3 pontos de referência, sendo desnecessária a implementação de fontes isoladas para
alimentar os circuitos independentes de drive dos IGBTs, reduzindo assim a complexidade e
custo do circuito. Além deste factor decisivo este circuito é indicado para inversores
trifásicos, e possui características tais como:
• Operacionalidade até 600V, tolerante a troca de polaridade, imune a ! ' elevados.
• Tempo de propagação igual para todos os canais.
• Geração de tempo morto de 2,5us.

60
• Tensão de gate de 10V a 20V.
• “Turn-off” dos canais se ocorrer:
Sobre e sub-tensão de alimentação.
Sobre corrente barramento.
Figura 5.17 - Aspecto do circuito de drive dos IGBTs e acopladores ópticos.
5.3.1. Ligação do IR2130
O esquema típico utilizado foi o da Figura 5.18, as ligações foram efectuadas segundo
a descrição do Layout do Application Note da International Rectifier. Os pinos e suas
respectivas funções são:
HIN1,2,3 Sinal de entrada para os IGBTs superiores.
LIN1,2,3 Sinal de entrada para os IGBTs inferiores.
FAULT Indica que ocorreu uma sobre corrente ou sub-tensão.
VCC Alimentação.
ITRIP Entrada de sinal para turn-off devido a sobre-corrente ou sub-tensão.
CAO Saída do amplificador de corrente.
CA- Alimentação negativa do amplificador de corrente.
VSS Massa.
VB1,2,3 Alimentações dos IGBTs superiores.
HO1,2,3 Saída do disparo dos IGBTs superiores.
VS1,2,3 Ligação da gate dos IGBTs superiores.
LO1,2,3 Ligação do disparo dos IGBTs inferiores.
VS0 Entrada do amplificador de corrente.
A diferença entre este esquema e o que foi implementado na realidade reside apenas ao facto
das resistências que ligam ao colector serem de 50Ω, passando assim a corrente de disparo a

ser o dobro, tornado a comutação
monitorizar o barramento CC é dimensionada de forma a minimizar as perdas, com a queda
de tensão de 1V para correntes maiores do que 10A
5.3.1.1. Isolamento
Como descrito anteriormente é primordial isolar ele
potência dos de controlo, desta forma foram usados optoacopladores da
TECHNOLOGIES os HCPL
centenas de vezes mais rápidos do que os comuns
fecho na Figura 5.19 a ligação do acoplador óptico
61
comutação mais rápida. A resistência de shunt
C é dimensionada de forma a minimizar as perdas, com a queda
de tensão de 1V para correntes maiores do que 10A [46][47].
Figura 5.18- Montagem do IR2130 utilizada[48].
Isolamento Eléctrico
Como descrito anteriormente é primordial isolar electricamente os circuitos de
ncia dos de controlo, desta forma foram usados optoacopladores da
os HCPL-4503. Estes optoacopladores foram aplicados
mais rápidos do que os comuns, com tempos de ligação de 0,6µs e 0,
a ligação do acoplador óptico [49].
Figura 5.19 - Ligação do acoplador óptico.
hunt utilizada para
C é dimensionada de forma a minimizar as perdas, com a queda
ctricamente os circuitos de
ncia dos de controlo, desta forma foram usados optoacopladores da empresa AVAGO
aplicados por serem
, com tempos de ligação de 0,6µs e 0,4µs de

62
5.4. Painel de Controlo
O painel de controlo apresentado na Figura 5.20 faz o interface entre o operador, o
processo de actuação e controlo.
A sua estrutura física inclui o circuito de entrada e saída de ar que está actualmente a ser
comandado pelo botão dedicado mas pensado para, no futuro, a ser accionado em
conformidade com a temperatura de forma automática.
Este painel é constituído pelo botão de on/off que é usado para ligar/desligar o
microprocessador e drive, pelo potenciómetro de regulação de velocidade, pelo botão de
selecção de marcha, e para a frenagem. Pelo botão de accionamento e por um potenciómetro
para variar o binário dessa frenagem. Além disto, inclui a ligação ao programador e uma
entrada USB, ligada na USART do microprocessador para a futura integração de um ambiente
visual, e ligação para encoder. Além destes dispositivos existem ainda a entrada da tensão
contínua e a saída das tensões alternada va, vb e vc, de forma simples e visualmente
perceptível.
Figura 5.20 - Aspecto do painel de controlo.

5.5. Controlo
O sistema de controlo é composto por dispositivos para a leitura de velocidade do motor,
pelo driver de potência centraliza
A escolha deste microcontrolador
de potência. Destaca-se o módulo de oito canais de
os módulos de conversão analógico
para permitir a interacção com um ambiente gráfico e
performance tendo em conta que a
quatro vezes.
Outro motivo da selecção é também o seu suporte
application notes e também o suporte “
um IDE (Integrated Development Environment
frente da concorrente principal
software livre e acompanhamento deste tipo de comun
Além disto a sua oferta a nível deste tipo de controladores é recente e ainda pouco explorada
como é o caso da família AT90PWM.
O diagrama de blocos apresentado na
componentes no sistema.
Figura
63
Controlo
composto por dispositivos para a leitura de velocidade do motor,
centraliza-se no microcontrolador PIC18F5531 da Microchip
A escolha deste microcontrolador deveu-se à sua elevada capacidade de controlo de circuitos
se o módulo de oito canais de PWM, interface para leitura de
analógico-digital (ADC). Destaca-se também a US
racção com um ambiente gráfico e ainda a possibilidade de aumento em
performance tendo em conta que a frequência de clock poderá ser aumentada em mais de
também o seu suporte tanto a nível de fabricante com as suas
o suporte “do it yourself” (DIY) mas principalmente por oferecer
Integrated Development Environment) em C. Neste aspecto a Microchip
frente da concorrente principal Atmel, que tem vindo a ganhar terreno muito a custa do
software livre e acompanhamento deste tipo de comunidade, um exemplo claro é o
oferta a nível deste tipo de controladores é recente e ainda pouco explorada
T90PWM.
iagrama de blocos apresentado na Figura 5.21 evidencia a integração
Figura 5.21 - Diagrama de blocos do andar de controlo.
composto por dispositivos para a leitura de velocidade do motor,
Microchip.
elevada capacidade de controlo de circuitos
, interface para leitura de encoders e
USART que é usada
ainda a possibilidade de aumento em
poderá ser aumentada em mais de
o a nível de fabricante com as suas
) mas principalmente por oferecer
Microchip continua a
que tem vindo a ganhar terreno muito a custa do
idade, um exemplo claro é o Arduíno.
oferta a nível deste tipo de controladores é recente e ainda pouco explorada
integração dos diversos

64
5.5.1. Placa de Controlo
A placa de controlo é constituída pelo microcontrolador PIC18F4431 e pelos
componentes periféricos necessários ao seu funcionamento.
O microcontrolador é responsável pelo comando do circuito de drive que actuará sobre a gate
dos IGBTs e o seu algoritmo de controlo foi desenvolvido para usar as definições escolhidas
através do painel de controlo e pela leitura de estado da máquina.
As suas principais características são um módulo de 8 canais de PWM, 6 dos quais para
comando da drive, um módulo de feedback para ligação do encoder, ADC de 200kbps para
leitura dos potenciómetros de comando e sensor de corrente da drive. Possui um clock interno
de 8Mhz mas capaz de executar instruções a 40Mhz com auxílio de um cristal externo.
A referência dos pinos deste microcontrolador encontra-se na Figura 5.22.
Figura 5.22 - Legenda da referência dos pinos do PIC18F4431.
5.5.2. Ambiente de Trabalho do MPLAB C18
O IDE MPLAB é uma ferramenta integrada e gratuita para o desenvolvimento de
software em sistemas embebidos da Microship e para fazer o debug por software e hardware
do código implementado. Este plugin além de programação em assembler, permite a
programação em linguagem C e até mesmo os dois tipos de linguagem.
Possui já bibliotecas de suporte ao PWM, SPI, I2C, UART, USART, matemática, lógica, etc. É

65
possível manipular essas próprias bibliotecas de forma optimizar o código. Em baixo na
Figura 5.23 podemos o ambiente gráfico desse software.
Figura 5.23 - Ambiente de programação do MPLAB C18.
5.5.3. Software de Controlo
O sistema de controlo proposto assenta em técnica de malha fechada, onde é usada a
mesma aproximação apresentada no Capítulo 4. Neste caso a implementação prática foi
executada sem realimentação de velocidade por parte do controlador, desta forma o
controlador PI não tem efeito, pelo que não será abordado. Nos próximos itens, 5.6.2.1 e
5.6.2.2 é apresentado a forma de execução do processo em malha fechada.
5.5.3.1. Algoritmo de Controlo
O algoritmo de controlo, lê o painel e executa as ordens de controlo de acordo com a
leitura efectuada ciclicamente ao painel de controlo.
Caso a informação encontrada seja zero (on/off), então a velocidade é reduzida para zero e o
microcontrolador deixa de efectuar impulsos.

66
Aquando da selecção de direcção (Esquerda/Direita) a velocidade do motor é por questão de
segurança, numa primeira fase reduzida para zero e só depois actualizada com o valor de
referência actual, sendo trocadas duas das fases de alimentação do motor (por exe: fase a
passa a ser a fase b).
Aquando da execução da travagem o funcionamento é o mesmo que na simulação, sendo a
referência actualizada para uma percentagem da velocidade actual do rotor do motor. Como a
realimentação não exista a única forma de implementar este controlo foi efectuar essa
mudança de uma forma programada e controlada.
Figura 5.24 - Fluxograma da função principal do controlo.
O algoritmo da subrotina de interrupção é executado com base no método de polling, como é
o caso da leitura da referência que é efectuada de uma forma cíclica, não sendo apenas lida
quando existe uma alteração do valor.

67
5.5.4. Conclusão
A montagem poderia ter sido bem mais simples se tivesse utilizado uma drive integrada,
mas por uma questão de custo foram utilizados semicondutores discretos, o que se traduziu
em maior tempo de desenvolvimento maiores problemas na detecção de falhas devido ao
circuito mais complexo.
Numa aplicação em ambiente real é a única solução a seguir pois permite uma integração
maior. A indústria já apresenta soluções competitivas e integradas, onde alem da drive são
apresentados módulos de disparo totalmente desenvolvidos para a aplicação onde a
comunicação é efectuada por fibra óptica logo imune a ruídos e com elevada taxa de
comunicação.
Existe o caso prático da SEMIKROM, pois disponibiliza cada vez mais uma oferta tendo em
vista o mercado intermédio e uma rápida implementação, poupando assim tempo e dinheiro
na tentativa e erro da implementação de raiz.
Relativamente à programação, foram atingidos os objectivos pois foi conseguida a
implementação base e a partir desse momento é uma questão de tentativas e trabalho,
optimização e controlabilidade.

68

69
Capítulo 6.
Resultados obtidos
Os resultados forma obtidos com o controlo a operar em foram em malha aberta, segue-se
em baixo uma explicação das formas de onda obtidas.
6.1. Apresentação dos Resultados
Na Figura 6.1 podemos ver a tensão medida à saída do microcontrolador, sendo invertidas
depois do optoacoplador, à saída do circuito de drive IR2130 temos as mesmas, apenas com
uma maior amplitude (15V).
Figura 6.1 - Sinais de comando das gates.

70
Quando o IGBT de cima liga o de baixo já tem de estar desligado, a esse tempo dá-se o nome
de “dead-time”, que pode ser constatado na Figura 6.2.
Figura 6.2 – Visualização do Dead-time.
Relativamente às formas de onda na saída do inversor medidas com auxílio do filtro descrito
no capítulo anterior sintonizado para 120Hz, podem constatar-se uma alta taxa de conteúdo
harmónico (irregularidade na onda, picos), estas apresentam um alto conteúdo harmónico,
como pode ser observado nas sinusóides.
Na Figura 6.3 as formas de onda referentes ao arranque do variador de velocidade. Trata-se
de um teste pois, na sua implementação este tipo de arranque o boost. E em seguida a
progressão é efectuada da forma linear V/F como pode ser visto na Figura 6.4.
Figura 6.3 – Ondas referentes as correntes nas fases no arranque com Boost, medidas nos enrolamentos
do motor.

71
Figura 6.4 – Ondas referentes as correntes no arranque depois do boost.
Um dos problemas detectados nestas formas de onda foi na mudança de frequência, isto é,
numa primeira aproximação, a recta V/F era efectuada em degraus, e na Figura 6.5 pode ser
constatada a forma brusca como essa mudança era efectuada pelo controlador.
Figura 6.5 – Formas de onda das correntes na aceleração.
Na Figura 6.6 temos uma frequência mais elevada de forma a acelerar a máquina assíncrona e
na Figura 6.7 a frequência máxima que neste caso estava limitada a 50Hz.
Foram efectuados testes até os 120Hz, mas como a tensão era baixa, o binário era muito
reduzido.

72
Figura 6.6 – Tensão aos nos enrolamentos do estator.
Figura 6.7 – Tensão aos nos enrolamentos do estator
a uma frequência máxima de 50Hz.
6.2. Conclusão
O hardware foi integrado com a programação tendo sido efectuados testes até os 120V
tensão de forma a não correr riscos de danificação do material nesta fase de obtenção de
resultados.
Como comprovado o trabalho funcionou de forma integrada, foram adquiras as formas de
onda na aceleração, apensar de não se encontrarem desfasadas perfeitamente entre si de 120º,
para isso era necessário o ajuste no código das interrupções do microcontrolador.
A recuperação de energia não foi efectuada devido à carga do motor ser baixa.

73
Capítulo 7.
Conclusão e Trabalhos Futuros
Este trabalho foi a maior experiencia e mais duradoura a nível académico, enriquecedora
ao nível do saber individual, estudo e competências adquiridas. Revelou também todo o
estudo e sinergias que já existem à volta dos motores de indução e variadores de velocidade,
e para onde a indústria segue. A conquista de novos materiais e tornar os processos mais
eficientes é a meta.
O principal objectivo deste trabalho foi estudar desenvolver um inversor capaz de fazer o
aproveitamento energético da frenagem pelo método da variação da frequência de
alimentação.
No segundo capítulo foi efectuado o estudo do motor de indução trifásico, formas de obter as
suas características físicas bem como o estudo do seu comportamento segundo a variação
tanto da frequência como da tensão de alimentação. Trata-se de uma máquina bem conhecida
no regime permanente.
Sendo o terceiro capitulo onde foi descrito o estudo, pesquisado o estado de desenvolvimento
dos variadores de velocidade onde são abordadas as principais topologias e técnicas de PWM
e controlo. Os dispositivos de corte (IGBT´s, GTO, MOSFET) são referenciados e estudados
os seus campos de funcionamento descritos. Por fim são estudadas os diversos tipos de
frenagem eléctrica, com ou sem recuperação da energia cinética. No final deste capítulo foi
possível analisar o grau de dificuldade na qual consiste o desenvolvimento de um variador de
velocidade com as características á priori determinadas.
O capítulo das simulações, o quarto, constou em desenvolver um sistema com um inversor
trifásico onde o aproveitamento seria efectuado a custa do sobre dimensionamento da
capacidade do barramento CC. Com um sistema em malha aberta onde foram simulados
diversos estágios de andamento com diferentes binários e variando a sua velocidade de
alimentação onde é constatada a energia a ser armazenada, e posteriormente enviada
novamente para o motor. Os resultados foram obtidos sem realimentação, dando uma

74
referência no tempo com o controlo proporcional onde os valores foram obtidos por tentativa.
A implementação do hardware desde o de controlo até a implementação do próprio inversor
foi obtida com sucesso no quinto capítulo. Com este trabalho foi conseguido um padrão para
a implementação de pontes inversoras de IGBT discretos ligados entre os barramentos Vcc,
Gnd, va, vb e vc si de uma forma simples e robusta, onde as ligações normalmente utilizadas
em bancada são substituídas por barramentos em cobre paralelos entre sim, diminuindo assim
as indutâncias parasitas, e tornando assim as comutações dos semicondutores mais eficientes.
Quanto ao software foi parcialmente desenvolvido devido a dificuldades na obtenção de um
regime eficiente nas tensões mais elevadas, as nominais, onde os IGBT´s eram destruídos
dificultando a descoberta do problema.
O sexto capítulo são apresentados os resultados práticos, estes não formam atingidos como de
esperar depois do trabalho desenvolvido. Para ser mais eficiente e tornar possível uma
variação mais significativa de energia, a única solução possível é realizar os testes utilizando
uma bancada de testes ou obtenção de uma maior inércia, no primeiro caso a solução ideal
pois permite simular a carga em todos os regimes funcionamento, usando para isso uma base
sensorial de binário e de velocidade no do “rotor”. A inércia usada tinha uma massa bastante
baixa comparativamente com o necessário.
7.1. Sugestões para Trabalho Futuro
Como sugestões para trabalhos futuros sugere-se a exploração de outro tipo de ambiente
de desenvolvimento, experimentação de ferramentas vocacionadas para a rápida
implementação dando ênfase à obtenção de resultados práticos. Depois de uma análise teórica
fundamentada, definida a abordagem a implementar tanto em hardware como em software a
implementar, teremos o tempo para abordar as diversas técnicas.
Sendo assim, considera-se que como a indústria já fornece equipamentos com as mais
variadíssimas topologias de inversores, aplicados a máquinas de indução, pode caber como
trabalho a implementação deste ideia noutros tipos de máquinas, síncrona, relutância variável
são exemplo dos quais anda são difíceis de se encontrar comercialmente, tendo ambas
inúmeras vantagens tais como a sua robustez e custo de produção reduzido da própria
máquina.
75
Uma outra área de extrema importância, é a forma como a energia é transferida do
barramento para ser armazenada, existem variadíssimas topologias de conversores que podem
ser integradas futuramente tais como os sistemas bidireccionais. Como são exemplo as fontes
comutadas.

76

77
Referencias Bibliográficas
[1] Comissão das Comunidades Europeias, "Eficiência Energética: Atingir o objectivo de
20%," Bruchelas, 2007.
[2] European Commission, "Commission presents energy security, solidarity and efficiency
proposals," Brussels, 2007.
[3] Comissão das Comunidades Europeias, "Directiva de Certificação Energetica
(92/75/EEC)," Bruchelas, 2008.
[4] Russel. J. Kerkman, "AC Drives: Year 2000 (Y2K) and Beyond," Rockwell Automation,
2000.
[5] Bimal M. Bose, Power Electronics and Motor Drives - Advances and Trends.: Academic
Press, 2006.
[6] Trzynadlowski M. Andrzej, Control of Induction Motors, 1st ed.: Academic Press, 2000.
[7] Malcolm Barnes, Practical Variable Speed Drives and Power Electronics.: Elsevier,
2003.
[8] Bimal K. Bose, Modern Power Electronics and AC Drives.: Prentice Hall, 2002.
[9] NEMA - Trade association of choice for the electrical manufacturing industry. (2010,
Nov.) [Online]. http://www.nema.org/
[10] Rockwell International Corporation, Drives Engeneering Handbook - Another Quality
Solution By Application Engineering.: Rockwell International Corporation, 2004.
[11] Russel. J. Kerkman, "AC Drives: Year 2000 (Y2K) and Beyond," Rockwell Automation:
Standard Drives Division, Mequon, 1999.
[12] Zhenyu Yu, "A Review of Three PWM Techniques," Texas Instruments, Houston, DSP
Automotive/Industrial Control Applications 1997.
[13] T. Undeland and W. Robbins N. Mohan, Power Electronics, 2nd ed. Nova Iorque,
U.S.A.: Jonh Wiley & Sons, Inc., 1995.
[14] John A. Houldsworth and Duncan A. Grant, "The Use of Harmonic Distortion to
Increase the Output Voltage of a Three-Phase PWM Inverter," IEEE Transations on
Industry Applications, vol. VOL. IA-20, NO. 5, pp. 1224-1228, Setembro/Outubro 1984.
[15] S. Rizzo and N. Zargari, "Medium voltage drives: what does the future," in Power
Electronics and Motion Control, U.S.A., 2004, pp. 82-89.
[16] Imecs Maria, "A Simple approach to induction machine parameter estimation,"
Technical University of Cluj-Napoca, Romania, Workshop on Electrical Machines

78
Parameters 2001.
[17] Semikron. (2010, Aug.) Manufacturer and supplier of single and multi-channel devices
such as thyristors and diodes, especially for power applications. [Online].
www.semikron.com
[18] Semikube - Manufacturer and supplier of single and multi-channel devices such as
thyristors and diodes, especially for power applications. (10, Junho) [Online].
http://www.semikube.com/
[19] J. Jiang, "An efficient braking method for controlled AC drives with a diode rectifier
front end," in IEEE Transations on Industry Applications, Germany, 2001, pp. 1299-
1307.
[20] 4wheeloffroad - Off road truck accessory installation. (2010, Aug.) [Online].
www.4wheeloffroad.com
[21] Xtrac Toroidal traction drive specialist Torotrak plc and vehicle transmission design and
manufacturing company. (2010, Aug.) Xtrac. [Online]. http://www.xtrac.com/
[22] Flybrid Systems make hybrid energy storage devices based on high-speed flywheel
technology for F1 and mainstream automotive applications. (2010, Aug.) [Online].
http://www.flybridsystems.com/
[23] Dornel Offer services in the provision of High Power resistors Electromagnets
Aluminium castings fabrications. (2010, Aug.) [Online]. www.dornel.co.uk
[24] Maxwell - Manufacturer of recording media and energy products. (2010, Aug.) [Online].
www.maxwell.com
[25] FDK America - Global electronic component and battery manufacturer. (2010, Aug.)
www.fdkamerica.com.
[26] EPCOS - Manufacturer of electronic components, modules and systems. (2010, Aug.)
[Online]. www.epcos.com
[27] 4x4, van, truck and bus tyres. Continental - Manufacturer of passenger car. (2010, Aug.)
[Online]. www.conti-online.com
[28] N.R. Raju, "An SCR-based regenerative converter for VSI," in Power Electronics
Specialist Conference, 2003, pp. 1770 - 1774.
[29] S. Saha, A.V. Dandekar, and V.P. Sundersingh, "A modified approach of feeding
regenerative energy to the mains," Industrial Electronics, IEEE Transactions on , vol.
43, pp. 510 - 514, 1996.
[30] Rockwell Automation. (2010, Aug.) Power, control and information solutions and
services that help solve manufacturing problems. [Online].
www.rockwellautomation.com
[31] Allen-Bradley, "Regenerdor de Linha 1336," Manual de Utilizador 1999.

79
[32] Saftronics Inc, "SCR-Regenerative AC Drive," Application Note.
[33] Rockwell Automation, "AC Drives in Common Bus Configurations," Rockwell
Automation, Application Guidelines.
[34] A. Miloudi and A. Draou, "Variable gain PI controller design for speed control and rotor
resistance estimation of an indirect vector controlled induction machine drive," in 28th
Annual Conference of IES, 2002, pp. 323-328.
[35] Eun-Chul Shin, Tae-Sik Park, Won-Hyun Oh, and Ji-Yoon Yoo, "A design method of PI
controller for an induction motor with parameter variation," in IECON-03 29th Annual
Conference of IES, p. 408.
[36] ABB - Leading supplier of industrial robots modular manufacturing systems and service.
(2010, Aug.) [Online]. http://www.abb.com/
[37] Wei Chen, Dianguo Xu, Rongfeng Yang, Yong Yu, and Zhuang Xu, "A novel stator
voltage oriented V/F control method capable of high output torque at low speed," in
Power Electronics and Drive Systems, 2009. PEDS 2009. International Conference on ,
Taipe, 2009, pp. 228-233.
[38] "LM78XX/LM78XXA 3- Terminal 1A Positive Voltage Regulator," Fairchild, Datasheet
2010.
[39] BHC Components Ltd, "Application Notes Aluminium Electrolytic Capacitors," 2002.
[40] Fuji Electric, "Fugi IGBT modules application manual," 2004.
[41] K.J Um, "Application Note 9020, IGBT Basic II," Fairchild Semiconductor, 2002.
[42] Semikron, "IGBT and Mosfet power modules," Application Manual 2002.
[43] Jeffrey Cain, "The effects of ESR and ESL in digital decoupling applications," AVX
Corporation,.
[44] Semikron, "Application Note Connection of gate drivers to IGBT and controller," 2002.
[45] Jamie Catt, "Optically Isolated Gate Drive Circuit," International Rectifier, Design Tips
94-12 1993.
[46] A. Merello, "Using monolithic high voltage gate drivers," International Rectifier,.
[47] International Rectifier, "Six-output 600V MGDs simplify 3-phase motor drives,"
Application Note AN-985.
[48] Jamie Catt, "3-Phase bidge drive with overcurrent protection," International Rectifier,
Design Tips 1994.
[49] "HCNW4502/3 HCPL-0452/0453/4502/4503 Single Channel, High Speed
Optocouplers," Avago technologies, datasheet 2009.
[50] S. Gardella, M. Marchesoni, R. Salutari G. Carrara, "A new multilevel PWM method : a
theoretical," in IEEE trans. on pow. Elect., vol.7, no 3, 1992, pp. 497-505.

80
[51] R. L. G. Pregitzer, "Simulações Computacionais de Filtros Activos de Potência,"
Universidade do Minho, Tese de Mestrado 2006.
[52] Jonathen Adams, "Bootsrap component selection for control IC´s," International
Rectifier, Design tip 98-2a.
[53] Semikron , "Snubber application notes," 2002.

81
7.2. Apêndice I
Main: Programa implementado em C, para o microcontrolador PIC18F4431.

82

83

84
Funções: o software implementado em C.

85

86
Init C: o software implementado em C.

87






























