Embed Size (px)
Citation preview

Análise geometricamente não linear de pórticos
Manuel Ritto Corrêa
Conteúdo
1 Introdução 3
2 Comportamento geometricamente não linear de uma barra 42.1 Conceito de rigidez geométrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2 Definição de esforços no contexto de uma análise geometricamente não linear . . . . 62.3 Matriz de rigidez geométrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.4 Rigidez elástica e geométrica para outras versões do elemento de barra . . . . . . . . . 82.5 Implicações para a análise da estrutura pelo método dos deslocamentos . . . . . . . . 9
3 Determinação de cargas críticas 113.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.2 Equação característica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.3 Modos de instabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4 Efeitos de 2a ordem 194.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2 Análise de 2a ordem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.3 Método das forças laterais equivalentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.4 Determinação de trajetórias de equilíbrio . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5 Métodos mais avançados 335.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.2 Equação diferencial de equilíbrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.3 Funções de forma e a matriz de rigidez geométrica consistente . . . . . . . . . . . . . . 345.4 Funções de estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.5 A formulação co-rotacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.6 Comparação entre as diversas abordagens . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.7 Estruturas 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6 Métodos aproximados 466.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.2 Método de Horne para determinação de cargas críticas . . . . . . . . . . . . . . . . . . . 466.3 Fatores de amplificação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496.4 Método da amplificação dos efeitos sway . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
7 Comentários finais 54
1

2

1 Introdução
Estruturas constituídas por barras esbeltas sujeitas a esforços axiais significativos são sensíveis aosefeitos geometricamente não lineares — também designados por efeitos de segunda ordem. Nestasestruturas é fundamental considerar a configuração deformada na escrita das equações de equilíbrio.
Recorde-se que na análise linear de estruturas, a que também podemos chamar de análise de pri-meira ordem, as equações de equilíbrio são escritas na configuração inicial (indeformada) e por essarazão não é tido em conta o acoplamento entre deslocamentos e forças nessas equações (lineari-dade geométrica). Deste modo, admitindo um material elástico linear (linearidade física), todas asequações governativas são lineares, sempre com solução única para qualquer estrutura isostática ouhiperestática.
É habitual considerar dois tipos de problemas geometricamente não lineares:
• determinação de cargas críticas através de uma análise linear de estabilidade, — onde se calculaqual o nível de carregamento a partir do qual o equilíbrio se torna instável;
• determinação de deslocamentos e esforços através de uma análise de 2a ordem — onde seresolvem as equações não lineares para obter um ponto de equilíbrio ou uma trajetória deequilíbrio correspondente a diferentes intensidades do carregamento.
A análise de estabilidade de colunas isoladas é geralmente feita a partir da equação diferencial deestabilidade e soluções analíticas podem ser obtidas para a coluna de Euler (simplesmente apoiada)ou para outras condições ideais de apoio. Esta abordagem permite a obtenção de cargas críticas,as quais se podem traduzir em comprimentos de encurvadura, e fornece ainda uma descrição docomportamento inicial de pós-encurvadura.
No entanto, a determinação do comportamento geometricamente não linear de estruturas maiscomplexas, compreendendo várias barras comprimidas, requer geralmente métodos numéricos, osquais conduzem a soluções aproximadas, cuja precisão pode contudo ter o rigor desejado, bastandopara isso aumentar o nível de discretização.
Este texto apresenta uma introdução à determinação do comportamento geometricamente nãolinear de pórticos planos constituídos por barras elásticas. Pretende-se estender as técnicas da aná-lise linear de estruturas para incluir, de uma forma simples, os efeitos geometricamente não lineares.Nessa perspectiva, privilegiam-se as abordagens que mantêm o formalismo do método dos desloca-mentos, embora também se incluam referências a métodos mais sofisticados. Incluem-se exemplosde pequena dimensão que podem ser resolvidos à mão, mas reproduzem-se também soluções comdiscretizações mais finas, obtidas por computador, mostrando assim a convergência dos métodosnuméricos.
Em todas as análises aqui realizadas admite-se que o carregamento é constante ou então — paraa determinação de cargas críticas ou de trajetórias de equilíbrio — que é proporcional a um únicoparâmetro. Na prática, neste tipo de análises baseadas num carregamento proporcional, o objetivoprincipal é saber em quantas vezes se pode aumentar um dado carregamento até o pórtico instabilizarou atingir um ponto limite e, desse modo, avaliar o seu nível de segurança.
3

2 Comportamento geometricamente não linear de uma barra
2.1 Conceito de rigidez geométrica
Uma análise geometricamente não linear considera necessariamente as equações de equilíbrio es-critas na configuração deformada. Existem muitas formas de ter em conta o acoplamento entre asvariáveis estáticas (forças, momentos, tensões) e os deslocamentos, com diversos graus de rigor ecomplexidade, sendo preferível optar-se pela formulação mais simples que fornece resultados sufici-entemente precisos.
No contexto da análise de estruturas reticuladas (pórticos), que incluem colunas esbeltas subme-tidas a compressões elevadas, é particularmente importante ter em conta a interação entre o esforçoaxial e os deslocamentos transversais nas barras. Uma das formas mais simples de modelar os efeitosgeometricamente não lineares nestas estruturas passa por calcular forças transversais que equilibramos momentos provocados pelo esforço axial quando uma das extremidades é desviada lateralmenteem relação à outra.
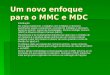
Na figura 1 representa-se uma barra vertical de comprimento L submetida a uma compressãoP. Na configuração inicial (ou indeformada), representada em (a), a barra está obviamente emequilíbrio sob a acção das duas forças de extremidade. Considere-se o caso de esta barra estarinserida numa estrutura, a qual sofre deslocamentos de modo a que na configuração deformada (b)existe um desvio ∆ entre as duas extremidades. Admitindo que a força P atuando na vertical semantém inalterada, verificamos que a barra não satisfaz o equilíbrio de momentos. No entanto, seadicionarmos as forças laterais de valor P ∆L como representado em (c) então temos novamente todasas equações de equilíbrio satisfeitas (admite-se que o deslocamento vertical relativo é desprezávelface a L).
P
P
L
P
P
P
P
P ∆L
P ∆L
∆∆
(a) (b) (c)
Figura 1: Barra comprimida. Equilíbrio nas configurações inicial e deformada
Estas forças mantêm o equilíbrio da barra deformada e nesse sentido cumprem um papel seme-lhante aos termos da matriz de rigidez elástica de uma barra. Enquanto os termos elásticos depen-dem das características do material e da secção transversal, estas forças laterais dependem apenasdo esforço axial (aqui suposto conhecido) e da geometria da configuração deformada. Por essa razãofalamos de rigidez geométrica. Contudo, observe-se que para uma barra comprimida estas forças sãocontrárias ao deslocamento, o que nunca acontece com os termos da rigidez elástica.
Nos desenhos da figura 1 podemos pensar na barra como uma biela bi-articulada, na qual nãoexistem momentos aplicados, mas o restablecimento do equilíbrio à custa de forças laterais podetambém ser feito numa barra fletida.
A consola da figura 2, de comprimento L e rigidez de flexão EI está submetida à ação de umacompressão P e de uma força horizontal F . Numa análise linear, esboçada na figura 2(b), facilmente
4

P
L
P P
P ∆L
∆∆
(a) (b) (c)
F3EIL3 ∆
3EIL3 ∆
3EIL2 ∆
3EIL3 ∆
3EIL2 ∆
3EIL3 ∆P ∆L
PF
M = F L
1− P L23EI
(d)
∆= F3EIL3 −
PL
P P P
F
Figura 2: Consola comprimida. Forças elásticas e laterais equivalentes
se conclui que o deslocamento horizontal vale
∆=∆0 =F L3
3EI
a que corresponde um momento na base igual a M = 3EIL2 ∆0 = F L. Como é evidente, escrevendo a
equação de momentos na configuração deformada tem-se um desiquilíbrio correspondente à excen-tricidade ∆ da força P.
Porém, usando novamente forças laterais para restabelecer este desequilíbrio, como se faz nafigura 2(c), tem-se que a força aplicada F deverá ser igual à soma algébrica da força elástica e daforça lateral geométrica, isto é,
F =3EIL3∆− P
∆
L=�
3EIL3−
PL
�
∆= K∆ (1)
Calculando ∆ a partir desta equação,
∆=F
3EIL3 − P
L
=1
1− P L2
3EI
∆0 (2)
obtemos um diagrama de corpo livre que satisfaz as equações de equilíbrio na configuração defor-mada. Em particular, observe-se na figura 2(d) que o (valor absoluto do) momento na base pode sercalculado quer recorrendo à rigidez elástica e ao deslocamento∆, quer, por equilíbrio, multiplicandoas forças F e P pelos respetivos braços,
M =3EIL2∆=
F L
1− P L2
3EI
M = F L + P∆= F L + PF L3
3EI
1− P L2
3EI
=F L
1− P L2
3EI
(3)
valendo mais que o produto F L correspondente à análise linear.Esta análise é baseada numa aproximação, nomeadamente a de se admitir que o comportamento
interno da barra é o mesmo que em análise linear, e por isso a solução obtida é também aproximada,mas tem a virtude de permitir uma solução que garante o equilíbrio global, na configuração defor-mada, das forças externas aplicadas à barra.
Na equação (1) observamos que a rigidez K da estrutura compreende dois termos, um correspon-dente à rigidez elástica e que é idêntica à obtida numa análise linear, o outro corresponde à rigidez
5

geométrica dependente do esforço axial P. Note-se o carácter não linear do problema pois o desloca-mento não varia linearmente com todas as forças aplicada — veja-se em particular o efeito da forçaP.
Pode causar alguma estranheza o facto de termos resolvido um problema geometricamente nãolinear com base numa equação linear, mesmo atendendo às aproximações consideradas. De facto,como veremos, muitos problemas não lineares necessitam de recorrer a um processo iterativo. Masneste problema da consola o facto de o esforço axial ser conhecido à partida (e não depender dosdeslocamentos) tornou o problema particularmente simples de resolver — ver discussão na secção2.5.
2.2 Definição de esforços no contexto de uma análise geometricamente não linear
Vale a pena refletir um pouco na questão da definição dos esforços, tema sempre relevante no con-texto de uma análise geometricamente não linear. Na situação da barra isolada comprimida apre-sentada na figura 1(c), definindo o esforço normal e transverso alinhados com a configuração inicial(ou indeformada) e admitindo a barra orientada de baixo para cima, concluímos que
N i = −P V i = −P∆
L
No entanto, se quisermos redefinir estes forças segundo a configuração deformada, isto é, respetiva-mente paralelas e perpendiculares à corda, então — ver figura 3 — teremos
N c = N i cosα+ V i senα V c = −N i senα+ V i cosα (4)
onde as funções trigonométricas podem ser calculadas através de
cosα=L
pL2 +∆2
senα=∆
pL2 +∆2
o que resulta em
N c = −P
√
√
√
1+�
∆
L
�2
≈ −P V c = 0
Nesta opção, desde que o deslocamento ∆ seja pequeno face ao comprimento L, continua a ter-seN c ≈ −P, ao mesmo tempo que garantimos o esforço transverso nulo (como é expectável de umabarra sem momentos de extremidade e sem cargas de vão). A mesma aproximação pode ser obtidamais facilmente, tomando os termos de primeira ordem nas funções trigonométricas
cosα≈ 1 senα≈∆
L(5)
cuja substituição em (4) leva, após desprezar os termos quadráticos em ∆, a
N c = (−P)1+�
−P∆
L
�
∆
L≈ −P V c = −(−P)
�
∆
L
�
+�
−P∆
L
�
1= 0
As duas opções para a definição dos esforços são igualmente válidas, cada uma delas com os seusméritos, mas é essencial ter sempre presente qual é a definição adoptada. Por exemplo, se os esforçossão definidos relativamente à configuração inicial, não se deve estranhar que uma biela bi-articulada(e sem cargas de vão) tenha esforço transverso.
No caso de uma barra fletida, como no exemplo da consola da figura 2, existem ainda maisopções: podemos definir o referencial alinhado com a direção (i) inicial, (ii) da corda, ou (iii) tan-gente á curva deformada. Para o tipo de análises realizadas neste texto, a última opção é demasiadocomplexa, pelo que limitamos a nossa atenção aos dois primeiros casos.
6

V
N
V
N
V i
N i
V i
N i
V c N c
V c
N c
α
α
α
Figura 3: Cálculo de esforços relativos à corda
Recorrendo à figura 2, temos evidentemente para a configuração inicial
N i = −P V i =�
3EIL3−
PL
�
∆
Em relação à corda, a transformação (4), realizada com a aproximação (5) leva a
N c ≈ −P V c = P∆
L+�
3EIL3−
PL
�
∆=3EIL3∆
Nestas expressões, as duas versões do esforço transverso foram calculadas em termos das compo-nentes elástica e geométrica, ambas proporcionais a ∆. Também podemos, escrever estes esforços apartir da força F e da componente geométrica,
V i = F V c =�
F + P∆
L
�
Por outro lado, o momento fletor, sendo em torno de um eixo perpendicular ao plano da estrutura,é idêntico para os dois referenciais,
M i = M c = −M = −F L
1− P L2
3EI
= −3EIL2∆
É particularmente interessante o facto de, embora o deslocamento∆ depender das forças lateraisgeométricas, o subsequente cálculo do esforço transverso V c e do momento fletor M poder ser feitounicamente com base nas forças elásticas a partir desse deslocamento. Esta observação é válidapara a definição de forças laterais geométricas aqui introduzida, mas não é generalizável a outrasdefinições.1
2.3 Matriz de rigidez geométrica
A técnica, aplicada no exemplo anterior a uma estrutura com apenas um grau de liberdade, podeser generalizada a qualquer estrutura, bastando definir a contribuição do esforço axial para a matrizde rigidez de cada barra. Na figura 4 definem-se os graus de liberdade associados a deslocamentostransversais de um elemento de barra.
Então a relação entre as forças nodais e os deslocamentos é dada por
F = Kd = (K e − K g)d (6)
1De facto, esta identificação só funciona porque a força geométrica horizontal é, nesta definição, aproximadamenteigual ao produto P senα. Ver secção 5.3 para ver outra abordagem ao estabelecimento de forças geométricas.
7

EI ,L
d2
d1 d3
d4
Figura 4: Graus de liberdade de um elemento de barra
onde a matriz de rigidez elástica K e é a fornecida pelo método dos deslocamentos da análise linear,que aqui se reproduz por conveniência,
K e =
12EIL3
6EIL2 −12EI
L36EIL2
6EIL2
4EIL −6EI
L22EI
L
−12EIL3 −6EI
L212EI
L3 −6EIL2
6EIL2
2EIL −6EI
L24EI
L
(7)
enquanto a matriz de rigidez geométrica K g , a qual quantifica o decréscimo de rigidez resultante doesforço de compressão, é dada por
K g =
PL 0 − P
L 0
0 0 0 0
− PL 0 P
L 0
0 0 0 0
(8)
Para a construção desta matriz, teve-se em conta os graus de liberdade considerados, a definição dasforças laterais introduzida anteriormente e ainda a relação ∆ = −(d3 − d1). É importante ter emconta corretamente o sinal dos termos da matriz K g . Por isso, não é de mais salientar que a matriz(8) está escrita admitindo que (i) P positivo representa um esforço de compressão e que (ii) a matrizde rigidez total é obtida subtraindo a parcela geométrica à elástica — ver (6).
A propósito, para elementos tracionados, onde P é negativo, a rigidez geométrica aumenta arigidez total, embora, como este efeito é do lado da segurança, seja também defensável não incluiros termos geométricos em barras tracionadas.
2.4 Rigidez elástica e geométrica para outras versões do elemento de barra
Para tornar este texto mais completo e de mais fácil utilização, inclui-se uma descrição de outrasversões do elemento de barra.
Como acontece na análise de estruturas linear, é também possível condensar alguns graus deliberdade, tirando partido de libertações internas. O caso mais importante na prática é a existência deuma rótula numa das extremidades. Como a matriz de rigidez geométrica considerada não envolveos graus de liberdade de rotação, basta suprimir nesta matriz a linha e coluna relativas ao grau deliberdade condensado. Então, para o elemento de barra de 3 graus de liberdade representado na
8

EI ,L
d2
d1 d3
Figura 5: Graus de liberdade de um elemento de barra, com rótula numa das extremidades
figura 5, as matrizes de rigidez elástica e geométrica são:2
K e =
3EIL3
3EIL2 −3EI
L3
3EIL2
3EIL −3EI
L2
−3EIL3 −3EI
L23EIL3
K g =
PL 0 − P
L
0 0 0
− PL 0 P
L
(9)
Estas matrizes são apropriadas para cálculos manuais, nos quais frequentemente se considera aindeformabilidade axial das barras e se obtém o esforço axial das barras com base em consideraçõesde equilíbrio. Para uma resolução mais sistemática do problema, realizada através de um programade computador, é preferível considerar a matriz de rigidez completa, envolvendo os seis graus deliberdade (duas translações e uma rotação por extremidade) definidos na figura 6, e cujas parcelastomam a seguinte forma:
K e =
EAL 0 0 − EA
L 0 0
0 12EIL3
6EIL2 0 −12EI
L36EIL2
0 6EIL2
4EIL 0 −6EI
L22EI
L
− EAL 0 0 EA
L 0 0
0 −12EIL3 −6EI
L2 0 12EIL3 −6EI
L2
0 6EIL2
2EIL 0 −6EI
L24EI
L
(10)
K g =
0 0 0 0 0 0
0 PL 0 0 − P
L 0
0 0 0 0 0 0
0 0 0 0 0 0
0 − PL 0 0 P
L 0
0 0 0 0 0 0
(11)
2.5 Implicações para a análise da estrutura pelo método dos deslocamentos
Na posse da matriz de rigidez total de cada barra é possível analisar uma estrutura reticulada combase no método dos deslocamentos. De facto, considere-se uma estrutura de n graus de liberdade.
2Para a condensação da última linha, basta fazer F4 = 0, pelo que se tem d4 = −3
2L d1 −12 d2 +
32L d3, cuja substituição
nas três primeiras linhas de (6) conduz ao resultado apresentado.
9

EI ,L
d3
d2 d5
d6
d1d4
Figura 6: Graus de liberdade de um elemento de barra com 6 graus de liberdade
Após a montagem da contribuição de todas as barras para a matriz de rigidez (componentes elásticae geométrica), as equações globais podem escrever-se como
Q = Q0 + Kq = Q0 + (K e − K g)q (12)
onde q são os deslocamentos independentes e Q e Q0 são respetivamente as correspondentes forçasnodais e de fixação (para as cargas de vão).3
Como os termos geométricos dependem do esforço axial em cada barra, a resolução do problemanão linear é feita em duas ou mais etapas:
(i) Determinação dos esforços axiais com base no equilíbrio simples ou numa análise linear (nãoconsiderando portanto os termos geométricos).
(ii) Admitindo que os esforços axiais não se alteram significativamente na análise não linear, cal-cular os deslocamentos com base em (12), tendo em conta também os termos da rigidez geo-métrica.
(iii) Se a hipótese admitida em (ii) não for válida, então é necessário um processo iterativo, no qualos esforços axiais vão sendo sucessivamente atualizados.
3 Como na análise linear de estruturas, para cada barra, é necessário relacionar os deslocamentos locais d com osdeslocamentos independentes q dos seus nós de extremidade. Para o elemento com seis graus de liberdade, tem-se
d = Abqb =�
A 00 A
�
qb com A=
cosθ senθ 0− senθ cosθ 0
0 0 1
onde qb é um vetor que agrupa os deslocamentos independentes partilhados pela barra e θ é o ângulo que o eixo dabarra faz com a horizontal. Nestas condições, a matriz de rigidez global K e o vetor de forças de fixação Q0, são obtidosjuntando as contribuições de cada barra,
K = Abarras
AT
b K bAb Q0 = Abarras
AT
b F0b
onde A representa a operação de «assemblagem» (espalhamento pelos graus de liberdade globais), K b é a matriz de rigidezda barra (incluindo as contribuições elástica e geométrica) e F0b é o vetor das forças de fixação local (ambos relativos aosgraus de liberdade d).
A título de exemplo, o vetor de forças de fixação local para uma carga uniformemente distribuída nos elementos debarra com 4 e 3 deslocamentos independentes são, respetivamente,
F0b =�
pL2
pL2
12pL2 − pL2
12
�TF0b =
�
5pL8
pL2
83pL
8
�T
L
pL2
12
pL2
p
pL2
12
pL2
L
pL2
8
3pL8
p
5pL8
10

3 Determinação de cargas críticas
3.1 Introdução
Uma aplicação dos conceitos introduzidos na secção anterior é o cálculo de cargas críticas em pórti-cos, ou seja, a obtenção do valor do parâmetro de carga para o qual as equações de equilíbrio deixamde ser determinadas.
Como primeira abordagem, retome-se o problema da consola, abordado na secção 2.1, e calcule-se qual é o valor de P para o qual o deslocamento ∆ tende para infinito, o que como sabemos doestudo da encurvadura de colunas deverá corresponder à carga crítica Pcr . Isso acontece quando odenominador de (2) tende para zero, isto é quando
Pcr =3EIL2
(13)
Para uma consola, o comprimento de encurvadura é 2L, pelo que a carga crítica é
Pcr =π2EI(2L)2
=2,467EI
L2
A diferença de cerca de 20% é obviamente explicada pelo carácter aproximado do conceito das forçaslaterais geométricas, e pode ser mitigada recorrendo a uma discretização mais fina da estrutura oua uma melhor quantificação da rigidez geométrica.
O objetivo da presente secção é o de generalizar esta abordagem para, com a ajuda da matriz derigidez geométrica definida em 2.3, determinar cargas críticas de estruturas reticuladas com váriosgraus de liberdade.
3.2 Equação característica
Numa estrutura isostática ou hiperestática, a equação do método dos deslocamentos com base narigidez elástica caracteriza-se por uma matriz de rigidez positiva definida e, consequentemente, temsempre solução única. Quando se inclui a parcela correspondente à rigidez geométrica isso deixa deser garantido. A carga crítica é então o menor valor do parâmetro de carga para o qual o determinanteda matriz de rigidez total — soma da parcela elástica com a geométrica — se anula, situação na qualos deslocamentos podem aumentar descontroladamente.4
Para este problema apenas interessa conhecer os esforços axiais de cada barra em função doparâmetro de carga α, já que o que está em causa é a matriz de rigidez K e não os vectores de forçasQ ou Q0. No entanto, bem entendido, estes esforços axiais dependem do carregamento aplicado.
Admita-se um determinado perfil de carregamento, para o qual o esforço axial em cada barrab vale Pb (calculados, por exemplo, com base numa análise linear). Admita-se adicionalmente umestado linear de pré-encurvadura, isto é, que, para valores inferiores à carga crítica, o esforço axial decada barra é proporcional ao parâmetro de carga, valendo, portanto, αPb. Então, enquanto a matrizde rigidez elástica é constante, os termos geométricos variam proporcionalmente a α, pelo que acondição do anulação do determinante da matriz de rigidez total K é
det(K −αK g) = 0 (14)
Matematicamente estamos na presença de um problema de valores e vetores próprios. A equaçãocaracterística (14) é sempre um polinómio de grau igual ou inferior ao número de deslocamentosindependentes.5 A carga crítica αcr é a menor raiz da equação (14).
4Muitas vezes a carga crítica é definida como a carga que corresponde à menor carga de bifurcação de uma estruturaideal, sem imperfeições geométricas e com barras submetidas à compressão simples até à ocorrência dessa bifurcação. Apresente definição, baseada no determinante da matriz de rigidez, é mais simples, sendo equivalente no caso das estruturasperfeitas mas mais geral por também se aplicar a estruturas com imperfeições ou carregamentos gerais.
5A matriz de rigidez geométrica pode apresentar vários termos nulos, inclusive na diagonal. Por essa razão o polinómiopode ter grau inferior à dimensão da matriz K .
11

∗ ∗ ∗
De seguida apresentam-se alguns exemplos6 de determinação de cargas críticas. Inicialmenterecorre-se a idealizações/discretizações com poucos graus de liberdade, o que possibilita uma deter-minação manual da carga crítica e desse modo facilita a compreensão da análise. Posteriormente,mostram-se resultados dos mesmos exemplos obtidos com discretizações mais finas.
Exemplo E1: Matriz de rigidez total de um pórtico de um vão. O pórtico representado na figura7(a) consiste em duas colunas (de rigidez e comprimentos diferentes) e uma viga. Admitindo que asbarras são todas axialmente indeformáveis — hipótese que será adotada em geral — e considerandoapenas um segmento por barra, existem três deslocamentos independentes, assinalados na figura7(b). A matriz de rigidez total é
Lc1
Pc1Pc2
Lc2
Lv
EIv
EI c
1
EI c
2
(a) (b)
q1q2 q3
Figura 7: Pórtico de um vão, Exemplo E1: (a) geometria e carregamento, (b) deslocamentosindependentes.
K =
12 EIc1
L3c1+ 12 EIc2
L3c2− αPc1
Lc1− αPc2
Lc2
6EIc1
L2c1
6EIc2
L2c2
6EIc1
L2c1
4EIc1Lc1+ 4EIv
Lv
2EIvLv
6EIc2
L2c2
2EIvLv
4EIc2Lc2+ 4EIv
Lv
(15)
Observe-se que a matriz de rigidez geométrica neste caso só afeta o termo K11 pois apenas o deslo-camento q1 envolve deslocamentos horizontais.
Nos exemplos seguintes obtêm-se soluções para diversas opções dos parâmetros. �
Exemplo E2: Carga crítica de um pórtico de um vão com todas as barras iguais. Admitindoque no Exemplo E1 todas as barras são iguais, isto é EIc1 = EIc2 = EIv = EI e Lc1 = Lc2 = Lv = L eainda Pc1 = Pc2 = P, a matriz (15) simplifica-se para
K =EIL3
24− 2λ 6L 6L
6L 8L2 2L2
6L 2L2 8L2
com λ=
αP L2
EI
6Para facilidade de futuras referências, cada exemplo é referenciado por um número autónomo, mesmo se consistenuma variante ou aprofundamento de um exemplo anterior.
12

Da anulação do determinante resulta
(24− 2λ)× 82 + 2× 62 × 2− 62 × 8− 22 × (24− 2λ)− 62 × 8= 0 ⇒ λ= 8,4
pelo que7
αP = 8,4EIL2
Este problema também pode ser resolvido condensando alguns graus de liberdade. Não havendoforças nodais ou de fixação associadas às rotações, estes graus de liberdade (q2 e q3) podem sempreser facilmente determinados a partir do deslocamento horizontal (q1), independentemente do valorda carga. De facto, nessas condições, a equação (12) toma a forma
EIL3
24− 2λ 6L 6L
6L 8L2 2L2
6L 2L2 8L2
q1
q2
q3
=
Q1
0
0
As duas últimas linhas desta equação não envolvem λ (não dependem portanto de α), permitindocondensar estes graus de liberdade,
�
6L q1 + 8L2 q2 + 2L2 q3 = 06L q1 + 2L2 q2 + 8L2 q3 = 0
⇒ q2 = q3 = −3
5Lq1 (16)
Substituindo estes valores na primeira equação, obtém-se então
EIL3
�
(24− 2λ)q1 − 2× 6L ×3
5Lq1
�
=Q1 ⇒EIL3(16,8− 2λ)q1 =Q1
Como o determinante de uma matriz 1 × 1 é zero quando o seu único termo é nulo, chegamosnovamente à conclusão de que λ= 8,4. �
Exemplo E3: Carga crítica de um pórtico de um vão com viga rígida e colunas de comprimentosdiferentes (L e 3L). Se no exemplo Exemplo E1 se admitir que a viga é rígida, isto é EIv =∞,então tem-se q2 = q3 = 0, pelo que a matriz de rigidez fica simplesmente
K =
�
12EIc1
L3c1
+ 12EIc2
L3c2
−αPc1
Lc1−αPc2
Lc2
�
Nesta situação, para colunas com secção igual, EIc1 = EIc2 = EI , carga igual, Pc1 = Pc2 = P, mascomprimentos eventualmente diferentes, a carga crítica é obtida a partir de
12EI
�
1
L3c1
+1
L3c2
�
−αP�
1Lc1+
1Lc2
�
= 0 ⇒ αP = 12EIL2
c1
1+�
Lc1Lc2
�3
1+�
Lc1Lc2
�
Se as colunas tem igual comprimento, Lc1 = Lc2 = L, tem-se αP = 12 EIL2 . Em contrapartida, se Se
Lc1 = L e Lc2 = 3L, conclui-se que
αP = 12EIL2
1+�1
3
�3
1+�1
3
� =283
EIL2≈ 9,33
EIL2
�
13

L
P
EI
EI
Pq1
L
(a)
rígida
L
P
EI EI
rígida
q2
P
P 2P
2P
2PL q1
PL q1
PL q1
2PL q1
(b)
2P
2PP
P PL q2
PL q2
P
(c)
Figura 8: Pórtico de dois pisos, Exemplo E4: (a) geometria e carregamento, (b) e (c) termosda matriz geométrica para q1 e q2
Exemplo E4: Carga crítica de um pórtico de dois pisos com vigas rígidas. Considere-se outrasituação relativa a um pórtico de dois pisos, como se representa na figura 8.
Admitindo as vigas rígidas, as matrizes de rigidez são
K e =
4× 12 EIL3 −2× 12 EI
L3
−2× 12 EIL3 2× 12 EI
L3
=
48 EIL3 −24 EI
L3
−24 EIL3 24 EI
L3
K g =
2PL +
2PL +
PL +
PL − P
L −PL
− PL −
PL + P
L +PL
=
6PL −2P
L
−2PL +2P
L
Para a determinação da matriz geométrica teve-se em conta que as colunas inferiores e superiorestêm, respetivamente, esforço axial igual a 2P e P — ver figuras 8(b) e (c).
A anulação do determinante implica, novamente definindo λ= αP L2
EI ,
det(K −αK g) = 0 ⇒
�
�
�
�
�
48− 6λ −24+ 2λ
−24+ 2λ 24− 2λ
�
�
�
�
�
= 0
para a qual existem duas soluções, λ= 6 e λ= 12, ou seja,
αP = 6EIL2= αcr P ou αP = 12
EIL2
sendo a carga crítica o menor destes valores. �
7Nesta análise poderíamos ter tomado P para parâmetro de carga, o que evitava a referência sistemática ao valor deαP. Como do ponto de vista da análise de 2a ordem, levada a cabo na secção 4, é preferível associar o carregamentoefetivamente aplicado ao parâmetro de carga α= 1, prefere-se manter a consistência da notação.
14

∗ ∗ ∗
A precisão das cargas críticas dos exemplos anteriores, melhora muito se considerarmos cadabarra vertical dividida em segmentos. Já para as barras horizontais, que não estão submetidas aesforços de compressão, não é necessária a subdivisão pois a matriz elástica já é exacta (dentro dasaproximações admitidas, tais como a indeformabilidade por tração e por corte).
Exemplo E5: Carga crítica de um pórtico de um vão com todas as barras iguais, considerandovários segmentos em cada coluna. Na tabela 1 apresentam-se os valores das cargas críticas dopórtico de um vão com as barras todas iguais, Exemplo E2, para diversos níveis de discretização.Constata-se que os valores obtidos anteriormente sobrestimam a carga crítica até 20% e que, utili-zando este método, é necessária uma subdivisão razoável para ter cargas críticas precisas. �
Tabela 1: Carga crítica do pórtico de um vão com as barras todas iguais, Exemplo E2
no segmentos αcr [EI
P L2 ] erro
1 8,400 14%2 8,164 11%3 7,750 5%5 7,515 2%10 7,413 0,5%20 7,388 0,1%∞ 7,379
Exemplo E6: Carga crítica de um pórtico de um vão com viga rígida e colunas de comprimentosdiferentes (L e 3L), considerando vários segmentos em cada coluna. Na tabela 2 apresentam-seos resultados para o pórtico de um vão com viga rígida e colunas de comprimento L e 3L, ExemploE3. Neste caso, os erros associados a um baixo número de segmentos são muito grandes, sendonecessários 10 segmentos para ter um resultado razoável. As razões para estes maus resultadosprendem-se com a existência de uma coluna muito esbelta e serão melhor explicados na secção 3.3.�
Tabela 2: Carga crítica do pórtico de um vão com viga rígida e colunas de comprimento L e 3L,Exemplo E3
no segmentos αcr [EI
P L2 ] erro
1 9,333 113%2 5,333 22%3 6,000 37%5 4,987 14%
10 4,533 3%20 4,432 1%∞ 4,386
3.3 Modos de instabilidade
Correspondendo a determinação da carga crítica a um problema de valores e vetores próprios, étambém importante a determinação dos vetores próprios que descrevem a configuração dos modos
15

de instabilidade. Uma vez determinada a carga de bifurcação αb (quer seja a crítica, quer seja outrade valor mais alto), basta resolver a equação
(K −αb K g)q = 0 (17)
e procurar soluções q não nulas. O sistema (17) é obviamente indeterminado (obtivemos αb deforma a que o determinante fosse nulo), pelo que estas soluções existem necessariamente. Maisconcretamente, para cada raiz da equação característica existe um modo de instabilidade.
Observem-se as semelhanças, mas também as diferenças, entre os problemas da estabilidade e dadinâmica de uma estrutura com n graus de liberdade. Ambos conduzem a um problema de valorese vetores próprios, mas o problema da dinâmica envolve a matriz de rigidez e a matriz de massas,enquanto que no problema da estabilidade as matrizes envolvidas são a de rigidez elástica e a matrizgeométrica.
∗ ∗ ∗
Retomem-se os exemplos analisados na secção 3.2, primeiro na versão com poucos graus deliberdade para cálculo manual e depois considerando modelos com mais graus de liberdade, querdevido à consideração de mais segmentos, quer admitindo vigas não rígidas.
Exemplo E7: Modos de instabilidade de um pórtico de um vão com todas as barras iguais. Ocaso do pórtico de um piso analisado com apenas um segmento por coluna não é muito interessante,pelo facto de as rotações (q2 e q3) poderem sempre ser condensadas a partir do deslocamento hori-zontal (q1) independentemente do valor da carga, pelo que o problema só tem na prática um grau deliberdade. Consequentemente, o modo de instabilidade corresponde simplesmente ao deslocamentoindependente q1 não nulo. �
Exemplo E8: Modos de instabilidade de um pórtico de dois pisos com vigas rígidas. Maisinteressante é o caso do Exemplo E4 relativo a um pórtico de dois andares. Substituindo a cargacrítica αP = 6 EI
L2 na matriz de rigidez total, obtemos
EIL3
�
48− 6× 6 −24+ 6× 2
−24+ 6× 2 24− 6× 2
��
q1
q2
�
=
�
0
0
�
isto é
�
12 −12
−12 12
��
q1
q2
�
=
�
0
0
�
⇒ q2 = q1
A mesma operação feita para o segundo modo, para o qual αP = 12 EIL2 , revela
�
−24 0
0 0
��
q1
q2
�
=
0
0
⇒ q1 = 0 (e q2 é qualquer)
Neste exemplo simples, onde as vigas são consideradas rígidas, cada modo de instabilidade en-volve apenas a deformação das colunas de um dos pisos. �
16

Exemplo E9: Modos de instabilidade de um pórtico de um vão com viga rígida e colunas decomprimentos diferentes (L e 3L), divididas em vários segmentos. No caso do Exemplo E3,pórtico de um vão com viga rígida e uma das colunas com o triplo do comprimento, analisado napágina 13, é interessante comparar a forma dos modos de instabilidade obtidos com diversos níveisde discretização.
Na figura 9 podemos observar que com uma boa discretização razoável (10 segmentos por barra),o 1o modo de instabilidade, correspondente a α= 4,53 EI
P L2 , envolve a encurvadura da coluna esbeltae não o deslocamento lateral da viga, como acontecia na análise realizada com apenas um segmentopor coluna, a qual, evidentemente, não podia capturar a verdadeira configuração do modo por estenão envolver deslocamentos das extremidades da coluna. É, aliás, por esta razão que neste caso aanálise com um segmento por barra obtém tão mau resultado (α = 9,33 EI
P L2 ). Em contrapartida,da observação da verdadeira configuração do modo crítico, é possível concluir a posteriori que ocomprimento de encurvadura da coluna esbelta é 3L
2 pelo que o valor exacto da carga crítica deveráser αP = π2 EI
( 3L2 )2= 4,386 EI
L2 .
Para a análise refinada, o modo envolvendo deslocamentos laterais aparece agora associado àsegunda carga de bifurcação (α = 7,26 EI
P L2 ). Mesmo assim, podem observar-se diferenças na confi-guração do modo de instabilidade — comparem-se as figuras 9(a) e (c) —, as quais se refletem nasdiferenças das respetivas cargas de bifurcação.
αP αP αPαPαPαP
(a) modo 1αP = 9,33 EI
L2 αP = 4,53 EIL2
(b) modo 1 (c) modo 2αP = 7,26 EI
L2
(10 segmentos (10 segmentos(1 segmento/barra) /barra) /barra)
Figura 9: Modos de instabilidade do pórtico de um vão com viga rígida, Exemplo E9: (a) 1o
modo, 1 segmento por barra, (b) 1omodo, 10 segmentos por barra, (c) 2omodo, 10segmentos por barra.
�
Exemplo E10: Modos de instabilidade de um pórtico de dois pisos com vigas flexíveis e colunasdivididas em vários segmentos. Neste último exemplo voltamos a analisar o pórtico de dois pisos,mas admitimos agora que as vigas são flexíveis, com rigidez igual a 3EI , e as colunas divididas emdez segmentos. A configuração dos dois primeiros modos de instabilidade é apresentada na figura10.
Verificamos que, como seria de esperar, as cargas de bifurcação são mais baixas que as calculadasadmitindo vigas rígidas e um segmento por barra — 4,42 EI
P L2 em vez de 6 EIP L2 e 8,18 EI
P L2 em vez de
17

(a) modo 1αP = 4,42 EI
L2
(b) modo 2αP = 8,18 EI
L2
Figura 10: Modos de instabilidade de um pórtico de dois pisos com vigas flexíveis, ExemploE10: (a) 1o modo, (b) 2omodo.
12 EIP L2 . Além disso, ambos os modos de instabilidade envolvem deslocamentos de toda a estrutura,
embora cada um dos modos concentre a deriva horizontal num dos pisos. �
18

4 Efeitos de 2a ordem
4.1 Introdução
Para além da carga crítica de uma estrutura é também importante determinar quais os esforços de2a ordem que resultam de todas as forças aplicadas à estrutura tendo em conta o comportamentogeometricamente não linear. É com base nestes esforços que as barras que constituem a estruturadevem ser dimensionadas. Na prática, uma análise de segunda ordem, mesmo que elástica, deve terem conta também as imperfeições geométricas, cuja definição não é aqui abordada.
Também esta análise pode ser baseada nos conceitos introduzidos na secção 2. Mas agora po-demos pensar no carregamento como fixo (o qual deverá ser inferior ao carregamento crítico) e éimportante ter em conta todos as forças aplicadas e todos os esforços (e não apenas os esforços axi-ais). A resolução das equações de equilíbrio, nas quais estão contabilizados os termos geométricos,fornece os deslocamentos independentes, os quais por sua vez permitem calcular os esforços nasbarras da estrutura.
Em vez de calcular apenas um conjunto de deslocamentos independentes aos quais correspondemuns determinados diagramas de esforços, podemos também determinar a evolução dos deslocamen-tos e esforços em função de um parâmetro de carga α. Dessa forma somos conduzidos a trajetóriasde equilíbrio, que ajudam a compreender melhor o comportamento não linear da estrutura.
αPαF
M
∆
∆
α M
αcr
α= 1
α
análise linear
análise 2 ordem
análise 2 ordem
análise linear
1
Figura 11: Trajetórias de equilíbrio de uma consola
Para melhor entender estes conceitos, retome-se o problema da consola simples analisada nasecção 2.1. Admita-se que o perfil de carregamento é compreendido pelas forças F e P cujos valoressão conhecidos e que o carregamento é obtido multiplicando este perfil pelo parâmetro de cargaα — ver figura 11. Pretende-se determinar as trajetórias do deslocamento e do momento fletor,isto é, as funções α(∆) e M(α). Embora esta análise com apenas um elemento de barra seja comovimos bastante grosseira, tem a vantagem de permitir a obtenção de uma solução analítica, a qual éapropriada para uma apreciação qualitativa. De facto, a partir das equações (2) e (3) tem-se
∆=αF L3
3EI
1− αP L2
3EI
⇒ α=3EIF L3∆
1+ P∆L
e M =αF L
1− αP L2
3EI
Estas trajetórias estão também representadas na figura 11. Na verdade, as duas trajetórias são homo-téticas, podendo obter-se o gráfico da curva M(α), transpondo o gráfico da curva α(∆) e aplicandouma mudança de escala. Porém a representação de cada uma das curvas foca-se na perspetiva maisrelevante para a análise. No primeiro caso, queremos descrever o comportamento não linear da es-trutura, observando como o parâmetro de carga tende para um limite (a carga crítica). No segundo
19

caso, queremos perceber como os esforços aumentam com o parâmetro de carga, sendo tanto maisamplificados quanto nos aproximamos do carregamento crítico. Na prática, o problema essencial deuma análise de segunda ordem é a determinação dos esforços para o carregamento aplicado, o qualcorresponde ao valor unitário do parâmetro de carga, isto é, a α= 1.
No caso de uma estrutura com vários graus de liberdade, são aplicáveis essencialmente os mes-mos conceitos. No entanto, a determinação quer dos deslocamentos quer dos esforços para umdeterminado nível de carregamento requer em geral a utilização de métodos numéricos. A presentesecção baseia-se exclusivamente nas técnicas introduzidas na secção 2 para modelar o comporta-mento geometricamente não linear das barras, com as quais é possível analisar o comportamentonão linear da estrutura de uma forma simples mas eficiente. Como complemento, nas duas secçõesseguintes referem-se alternativas para a análise de segunda ordem as quais são, respetivamente, (i)mais sofisticadas ou (ii) mais simples.
4.2 Análise de 2a ordem
Recupere-se a equação (12) relativa ao equilíbrio de uma estrutura,
Q = Q0 + (K e − K g)q (18)
a qual permite determinar que os deslocamentos são
q =�
K e − K g
�−1(Q−Q0) (19)
Como já referido na secção 2.5, para este cálculo é preciso conhecer previamente o esforço axial emcada barra, nem que seja uma estimativa razoável. Se necessário, pode implementar-se um processoiterativo até os valores dos deslocamentos convergirem.
De acordo com o explicado na secção 2.2, os esforços em cada barra podem ser determinadosa partir das forças nodais, as quais resultam da multiplicação da matriz de rigidez elástica de cadaelemento — não considerando portanto os termos geométricos — pelos respetivos deslocamentosnodais. O traçado dos diagramas de esforço tem obviamente também ter em conta as cargas de vão.
Seguem-se alguns exemplos ilustrativos.
Exemplo E11: Análise de segunda ordem de um pórtico de um vão com todas as barras iguais.Retomando o Exemplo E2 da página 12, pretende-se agora determinar os esforços de segunda ordemquando o pórtico está submetido ao carregamento representado na figura 12: para além das cargasverticais P = 6 EI
L2 , (note-se que é um valor inferior ao carregamento crítico) está agora tambémaplicada uma carga horizontal de valor Q1 = F = EI
L2 .
L
P = 6 EIL2
L
EI
EI
EI
q1
F = EIL2
A
B C
D
P = 6 EIL2
Figura 12: Análise de 2a ordem de um pórtico de um vão com todas as barras iguais, ExemploE11
20

Comece-se por recorrer novamente à condensação dos graus de liberdade de rotação, expressana equação (16). A substituição na primeira equação de equilíbrio (a que traduz a força segundoo grau de liberdade q1), para α = 1, mas admitindo esforços axiais diferentes em cada uma dascolunas conduz a
��
24− 2× 6×35
�
EIL3−
Pc1
L−
Pc2
L
�
q1 =Q1
⇒�
16,8EIL3−
Pc1 + Pc2
L
�
q1 =EIL2
Ora, através do equilíbrio de forças verticais em toda a estrutura, facilmente se conclui que
Pc1 + Pc2 = 2P = 2× 6EIL2
e, portanto, o deslocamento q1 é8
EIL3(16,8− 12)q1 =
EIL2
⇒ q1 =5L24
Note-se que, como as duas colunas têm o mesmo comprimento, mesmo desconhecendo o esforçoaxial em cada coluna, conseguimos calcular o termo geométrico exatamente e, por essa razão, nãofoi necessário iterar.
Os esforços devem ser calculados utilizando a matriz elástica e dos deslocamentos nodais — nãoesquecer que da condensação sabemos que q2 = q3 = −
35L q1. Por exemplo, no topo da coluna da
esquerda o momento vale
MB =6EIL2
q1 +4EI
Lq2 =
�
6EIL2−
35L
4EIL
�
q1 =185
EIL2×
5L24= 0,75
EIL
O mesmo resultado pode, de resto, ser obtido a partir das rotações da viga
MB = −4EIL
q2 − 2EIL
q3 = 6EIL
35L
q1 =185
EIL2×
5L24= 0,75
EIL
A determinação dos esforços transversos é feita do mesmo modo. Para ambas as colunas
Vc1 = Vc2 =12EI
L3q1 +
6EIL2
q2 =�
12EIL3−
35L
6EIL2
�
q1 =425
EIL2×
5L24= 1,75
EIL2
Estes valores são relativos às cordas deformadas e por essa razão a sua soma não é igual à forçahorizontal. Podemos verificar o equilíbrio somando os termos geométricos
Vc1 + Vc2 −Pc1 + Pc1
Lq1 = 2× 1,75
EIL2−
2× 6EIL2
L5L24=
EIL2= F
Na viga o esforço transverso é
Vv = 6EIL2
q2 + 6EIL2
q3 = −12EIL2
35L
q1 =365
EIL3×
5L24= −1,5
EIL2
Finalmente, para a determinação do esforço axial (de compressão) nas colunas há que somar ousubtrair à carga aplicada no topo de cada uma delas o esforço tranverso da viga
Pc1 = (6− 1,5)EIL2= 4,5
EIL2
Pc2 = (6+ 1,5)EIL2= 7,5
EIL2
Os diagramas de esforços correspondentes à análise linear, a esta análise de segunda ordem comum segmento por coluna e a uma análise de segunda ordem com 10 segmentos por coluna estãodesenhados na figura 13.9
A partir da observação da figura podemos tecer os seguintes comentários:8Este valor é 3,5 vezes superior ao de uma análise linear (na qual a rigidez seria simplesmente 16,8 EI
L3 ).9Metade da carga horizontal F foi aplicada no topo de cada coluna, o que explica os valores nulos ou quase nulos do
esforço axial na viga.
21

N [ EIL2 ] V [ EI
L2 ] M [ EIL ]
(a)
(b)
(c)
Figura 13: Pórtico de um vão com todas as barras iguais, Exemplo E11. Diagramas de esforçosobtidos na (a) análise linear, (b) análise de 2a ordem considerando um segmentopor coluna, (c) análise de 2a ordem considerando 10 segmentos por coluna
22

(i) Os esforços de segunda ordem são consideravelmente diferentes dos de primeira ordem. Emparticular os momentos fletores são bastante mais elevados, o que se compreende atendendoa que o carregamento está próximo do crítico.
(ii) A análise de segunda ordem com uma discretização das colunas mais fina (10 segmentos porcoluna), mostra diagramas com momentos fletores mais elevados. Conclui-se que a análisecom um segmento por coluna é demasiado grosseira apesar de, ainda assim, fornecer umaestimativa razoável da ordem de grandeza dos esforços.
(iii) A análise mais refinada mostra que, nas colunas, o andamento dos diagramas de segunda ordemé também qualitativamente diferente dos diagramas de primeira ordem. O esforço transverso(em relação à corda de cada segmento10) varia ao longo da coluna e o momento fletor deixade ser linear, efeito mais acentuado na colina mais comprimida.
Este exemplo mostra que quando se considera apenas um segmento por coluna (e as colunas têmcomprimento igual) é indiferente saber como a carga vertical se encontra distribuída pelas colunas,tanto para a determinação da carga crítica como dos efeitos de segunda ordem. No entanto, conside-rando mais segmentos por coluna, já existe alguma dependência da forma como as cargas verticaisestão distribuídas. Aliás, a própria existência de forças horizontais faz modificar os esforços axiais eisso é suficiente para modificar a «carga crítica» (com forças horizontais não existe bifurcação, peloque esta carga crítica é entendida como a que anula o determinante da matriz de rigidez). �
Exemplo E12: Análise de segunda ordem de um pórtico de um vão com viga rígida e colunasde comprimentos diferentes (L e 2L). Considere-se novamente o Exemplo E3, da página 13, naversão apresentada na figura 14 (a). A segunda coluna agora11 tem comprimento 2L e existemcargas verticais P = 6 EI
L2 e uma carga horizontal de valor F = EIL2 .
A equação de equilíbrio é
�
12EIL3+ 12
EI
(2L)3−
Pc1
L−
Pc2
2L
�
q1 =EIL2
Como as colunas não têm o mesmo comprimento, não é possível obter a rigidez geométrica semconhecer a distribuição das cargas verticais pelas duas colunas, a qual depende do esforço transversotransmitido pela viga,
Pc1 = P − Vvig Pc2 = P + Vvig
O (valor absoluto do) esforço transverso da viga, pode ser obtido com base nos seus momentos deextremidade, os quais dependem do deslocamento q1 — ver figura 14 (b).
Vvig =
�
�
�
�
MC −MB
L
�
�
�
�
=
�
�
�
�
�
�
− 6EI(2L)2
q1 −6EIL2 q1
L
�
�
�
�
�
�
=152
EIL3
q1
Substituindo estes valores na equação de equilíbrio obtemos
�
12EIL3+ 12
EI
(2L)3−
6 EIL2 − 15
2EIL3 q1
L−
6 EIL2 +
152
EIL3 q1
2L
�
q1 =EIL2
(20)
10Como as cordas dos vários segmentos têm inclinações diferentes o esforço transverso muda de segmento para seg-mento, mas é constante em cada segmento. Quanto mais segmentos se considerarem mais o andamento se aproxima do«verdadeiro» esforço transverso, medido na direção perpendicular à tangente à deformada.
11Esta opção (2L em vez de 3L) é para permitir que a análise com um segmento por coluna seja minimamente capazde representar o primeiro modo de instabilidade.
23

L
P = 6 EIL2
2L
L
rígida
EI
EI
(a)(b)
q1
P = 6 EIL2F = EI
L2
MC = −6EI(2L)2 q1
A
C
D
MB =6EI(L)2 q1
Pc2 = P + Vvig
B
Pc1 = P − Vvig
Figura 14: Análise de 2a ordem de um pórtico de um vão com viga rígida e colunas de compri-mentos diferentes (L e 2L), Exemplo E12
que simplifica para�
4,5+ 3,75q1
L
� q1
L= 1
Como este problema só tem um grau de liberdade, seria fácil obter a solução usando a fórmularesolvente de uma equação de segundo grau. Contudo, iremos recorrer ao processo iterativo sugeridoatrás, o qual é de aplicação geral. Em cada iteração, utilizamos a estimativa anterior do deslocamentopara obter a rigidez total e com esse valor obter nova estimativa do deslocamento. Isto é, utilizamosa fórmula recursiva
qi+11
L=
1
4,5+ 3,75qi
1L
Na tabela 3 mostra-se a progressão do deslocamento até à convergência, a qual ocorre em 5 iteraçõespara o número de algarismos significativos considerado.
Tabela 3: Iterações para obter o deslocamento horizontal de um pórtico de um vão com vigarígida e colunas de comprimentos L e 2L, Exemplo E12
iteração q1L
0 01 0,22222 0,18753 0,19224 0,19155 0,1916
�
24

Exemplo E13: Análise de segunda ordem de um pórtico de dois pisos com vigas rígidas.Admita-se que o pórtico analisado no Exemplo E4, página 13, está agora submetido a 4 forçasverticais de valor P = 4 EI
L2 e a duas forças horizontais F = EIL2 , como se mostra na figura 15.
L EI
EI
L
rígida
L
EI
EI
rígida
P = 4 EIL2P = 4 EI
L2
P = 4 EIL2 P = 4 EI
L2
q1
q2
F = EIL2
F = EIL2
ou 5EI
ou 5EI
Figura 15: Análise de 2a ordem de um pórtico de dois pisos com vigas rígidas, Exemplo E13(vigas rígidas) e Exemplo E14 (vigas com rigidez 5EI)
Como as colunas têm comprimentos iguais apenas interessa conhecer o total das cargas verticaissuportadas em cada piso. Assim, a matriz de rigidez total é constante e igual a (para P = 4 EI
L2 )
K =
48 EIL3 −24 EI
L3
−24 EIL3 24 EI
L3
−
6PL −2P
L
−2PL +2P
L
=EIL3
�
24 −16
−16 16
�
pelo que a equação de equilíbrio não necessita de processo iterativo,
EIL3
�
24 −16
−16 16
��
q1
q2
�
=EIL2
�
1
1
�
⇒
�
q1
q2
�
=
�
0,2500L
0,3125L
�
Com base nestes deslocamentos, obtém-se o diagrama de momentos fletores representado na figura16(a), onde os momentos nas colunas são obtidos a partir dos deslocamentos, os momentos nas vigassão obtidos por equilíbrio dos nós e o esforço axial nas colunas tem em conta o esforço transversodas vigas. �
Exemplo E14: Análise de segunda ordem de um pórtico de dois pisos com vigas flexíveis ecolunas divididas em vários segmentos. Quando se consideram as vigas também flexíveis, comrigidez igual a 5EI , e as colunas divididas em um ou dez segmentos, obtém-se os diagramas repre-sentados também na figura 16. Podemos observar que os esforços aumentam com a flexibilidadedas vigas e (com a maior flexibilidade os efeitos de segunda ordem tornam-se mais importantes) etambém com o número de segmentos (os efeitos de segunda ordem são melhor capturados).
Os diagramas relativos a vigas flexíveis e dez segmentos por coluna, apresentam trações no pilarinferior esquerdo, o que explica o andamento qualitativo substancialmente diferente observado nosdiagramas de esforço tranverso e momento fletor nos dois pilares do piso inferior.
�
25

(a)
N [ EIL2 ] V [ EI
L2 ] M [ EIL ]
(b)
(c)
Figura 16: Análise de 2a ordem de um pórtico de dois pisos. Diagramas de esforços para (a)vigas rígidas e um segmento por barra, Exemplo E13, (b) Vigas com rigidez 5EI eum segmento por barra, Exemplo E14, (c) Vigas com rigidez 5EI e 10 segmentospor coluna, Exemplo E14
26

Exemplo E15: Análise de segunda ordem de um pórtico de um vão com carga distribuída e umacoluna bi-articulada. Na estrutura assimétrica, representada na figura 17, uma das colunas é bi-articulada. O carregamento consiste em duas forças concentradas verticais P = EI
L2 , outra horizontalF = EI
4L2 e numa carga distribuída na viga p = EIL3 . Considerando apenas um segmento por barra,
existem apenas dois deslocamentos independentes, já que utilizaremos o elemento com rótula numadas extremidades.
L
P = EIL2
L
EI
EI
q1F = EI4L2
A
B C
D
P = EIL2 p = EI
L3
q2
Figura 17: Análise de 2a ordem de um pórtico de um vão com carga distribuída e uma colunabi-articulada, Exemplo E15
A matriz de rigidez elástica é (a viga só contribui para K22)
K e =
12 EIL3 6 EI
L2
6 EIL2 4 EI
L + 3 EIL
A matriz de rigidez geométrica envolve apenas o deslocamento q1, sendo necessário somar todas ascargas verticais,
PAB + PC D
L=
P + P + pLL
=1L
�
EIL2+
EIL2+
EIL3
L�
=3EIL3
pelo que podemos escrever
K g =
�
3 EIL3 0
0 0
�
Note-se que a barra bi-articulada não contribui para a matriz de rigidez elástica mas é essencial aconsideração do seu esforço axial de compressão para o cálculo da matriz de rigidez geométrica.
Aproveita-se, en passant, para calcular a carga crítica,
(12− 3α)× 7− 62 = 0 ⇒ αcr =167≈ 2,286
Para a análise de segunda ordem, é necessário também considerar as forças de fixação. Recor-rendo à informação disponível na nota de rodapé 3, página 10, temos
Q02 =pL2
8=
EIL3
L2
8=
EI8L
27

A equação de equilíbrio permite o cálculo dos deslocamentos independentes12
EIL3
�
9 6L
6L 7L2
��
q1
q2
�
+
�
0
EI8L
�
=
� EI4L2
0
�
⇒
�
q1
q2
�
=
5L54
− 772
Com base nestes deslocamentos, o cálculo dos esforços segue o processo habitual do métododos deslocamentos. Por exemplo, para calcular o esforço transverso (relativo à corda) e o momentofletor na base da coluna esquerda tem-se13
VA = +12EI
L3q1 +
6EIL2
q2 =EIL2
�
12×554− 6×
772
�
=1936
EIL2≈ 0,528
EIL2
MA = −6EIL2
q1 −2EI
Lq2 =
EIL
�
−6×554+ 2×
772
�
= −1336
EIL≈ −0,361
EIL2
Na figura 18 estão traçados os diagramas de esforços completos.
N [ EIL2 ] V [ EI
L2 ] M [ EIL ]
Figura 18: Análise de 2a ordem de um pórtico de um vão com carga distribuída e uma colunabi-articulada, Exemplo E15. Diagramas de esforços
Note-se que na viga BC existe um esforço axial de tração, apesar de a coluna direita CD ser bi-articulada (tem, portanto, esforço transverso nulo) e a força F estar aplicada em B. Na verdade, esseesforço resulta da força geométrica da coluna CD, sendo igual a
NBC = PC Dq1
L= 1,667
EIL2
554= 0,154
EIL2
Dito por outras palavras: para manter a coluna CD estável é necessário que a coluna AB providencieuma força horizontal que a segure, força essa que é transmitida pela viga BC. �
4.3 Método das forças laterais equivalentes
Uma forma alternativa de implementar a análise de segunda ordem, passa por encarar as forçasgeométricas como forças fictícias aplicadas. Isto é equivalente a rescrever a equação (19) como
q = K−1e
�
Q+ K gq −Q0
�
(21)
Ou seja, o termo K gq , calculado com os deslocamentos e os esforços axiais obtidos na iteraçãoanterior, é encarado como um vetor de forças laterais equivalentes. Em vez de recorrer à matriz
12Esta equação é muito semelhante à que escreveríamos numa análise linear. A única diferença, caso não considerásse-mos o termo geométrico, seria ter 12 na diagonal principal em vez de 9. A solução linear seria q1 =
5L96 e q2 = −
116 .
13Numa análise linear, os resultados seriam VA =14
EIL2 e MA = −
316
EIL , ou seja os esforços de segunda ordem são cerca do
dobro (mais exatamente 2,111 e 1,926 vezes, respetivamente).
28

de rigidez geométrica é obviamente possível quantificar a força equivalente diretamente, como seilustra na figura 19. Tem-se então,
Feq = P∆
L
onde L é o comprimento inicial da barra e ∆ é o deslocamento transversal relativo ente as duasextremidades.
Note-se a analogia com a figura 1, mas também as diferenças de sentidos. De facto enquanto amatriz geométrica encara a força lateral como uma força de restituição, as forças laterais equivalentesencaram-nas como uma ação.
L
P
P
P
P
P ∆L
P ∆L
∆
(a) (b)
Figura 19: Conceito de forças laterais equivalentes
Esta versão, mais que a anterior, exige um processo iterativo, já que para além dos esforços axiaisé necessário ter também boas estimativas dos deslocamentos. Claramente, embora este métodoconvirja para a mesma solução — as equações não lineares são as mesmas — fá-lo muito maislentamente, particularmente quando os termos da matriz geométrica aumentam, o que acontecepara carregamentos mais próximos do crítico. Por essa razão, apesar da sua simplicidade conceptualnão é recomendada.
A título de exemplo repete-se a análise dos dois primeiros problemas apresentados na sub-secçãoanterior, resolvidos com esta abordagem alternativa.
Exemplo E16: Análise de segunda ordem (pelo método das forças laterais equivalentes) de umpórtico de um vão com todas as barras iguais. Este exemplo é a repetição pelo método das forçasequivalentes do Exemplo E11, da página 20. Após a condensação num único grau de liberdade, arigidez elástica e a força equivalente são dadas por
Ke = 16,8EIL3
Feq = 2× P ×q1
L= 12
EIL3
q1
Em cada iteração é necessário calcular o deslocamento (com base na rigidez elástica e força total) esubsequentemente atualizar a nova força total (com base nos esforços axiais e deslocamento), o quese traduz nas seguintes equações
�q1
L
�i+1=
F itot
16,8 EIL2
F i+1tot = F + F i+1
eq =EIL2+ 12
EIL3
qi+11 =
�
1+ 12qi+1
1
L
�
EIL2
29

Apresentam-se na tabela 4 um resumo do processo iterativo que estas duas equações induzem.Em vez de «uma»14 iteração são agora necessárias 24 iterações para obter quatro algarismos signifi-cativos ( 5
24 ≈ 0,2083). �
Tabela 4: Iterações para obter o deslocamento horizontal de um pórtico de um vão com barrastodas iguais, Exemplo E16
iteração q1L Ftot [
EIL2 ]
0 0 11 0,0595 1,71432 0,1020 2,22453 0,1324 2,58894 0,1541 2,84825 0,1696 3,0352... ... ...23 0,2082 3,498924 0,2083
Exemplo E17: Análise de segunda ordem (pelo método das forças laterais equivalentes) de umpórtico de um vão com viga rígida e colunas de comprimentos diferentes (L e 2L). Repete-seagora o Exemplo E12 da página 23. Este problema tem apenas um grau de liberdade. A rigidezelástica e força equivalente são
Ke = 12EIL3+ 12
EI
(2L)3= 13,5
EIL3
Feq =Pc1 q1
L+
Pc2 q1
2L
Para a resolução deste problema é necessário ter em conta a distribuição das cargas verticais pelasduas colunas, a qual já foi quantificada anteriormente. Recuperando as equações relevantes, ver(20), tem-se então agora
�q1
L
�i+1=
F itot
13,5 EIL2
F i+1tot = F + F i+1
eq =
1+ 9qi+1
1
L− 3.75
�
qi+11
L
�2!
EIL2
O processo iterativo está resumido na tabela 5, podendo observar-se que, para obter a mesmaprecisão, são agora necessárias 14 iterações em vez de 5. �
∗ ∗ ∗
Em resumo, embora esta formulação alternativa leve ao mesmo resultado, fá-lo de uma formamais lenta. A única vantagem desta forma alternativa é a possibilidade de usar sempre a mesmamatriz de rigidez em todas as iterações, o que pode ser vantajoso num problema com vários grausde liberdade por evitar repetidas inversões desta matriz. Atente-se, no entanto, que esta vantagemnão se regista nos casos mais comuns de pórticos (nos quais o comprimento das colunas é constanteem cada piso) já que a análise com base na matriz geométrica não requer iterações.
14Como já vimos, neste caso a solução com base na matriz geométrica é obtida sem necessidade de iterar.
30

Tabela 5: Iterações para obter o deslocamento horizontal de um pórtico de um vão com vigarígida e colunas de comprimentos L e 2L, Exemplo E17
iteração q1L Ftot [
EIL2 ]
0 0 11 0,0741 1,64612 0,1219 2,04163 0,1512 2,27534 0,1685 2,41045 0,1785 2,4874... ... ...13 0,1915 2,585914 0,1916
4.4 Determinação de trajetórias de equilíbrio
O traçado de trajetórias apenas requer a realização de sucessivas análises de segunda ordem, paravalores crescentes do parâmetro de carga. Deste modo a análise assenta numa estratégia incremental-iterativa. Consideram-se vários incrementos, cada um correspondente a um nível de carga, utilizando-se, para cada incremento, o método numérico já apresentado, o qual compreende em geral diversasiterações até se obter a convergência.15
No final, é habitual representar os resultados através de gráficos mostrando a evolução do parâ-metro de carga com a variação de um deslocamento particular, considerado relevante.
Exemplo E18: Trajetória de equilíbrio de um pórtico de dois pisos com vigas flexíveis e colunasdivididas em dez segmentos. Na figura 20 está representada a trajetória de equilíbrio do ExemploE14, mostrando-se a evolução do multiplicador de carga α com o maior deslocamento horizontal(no topo da estrutura). A trajetória foi calculada aplicando as cargas de forma gradual em oitoincrementos, para os quais foram necessárias 4, 5, 5, 6, 6, 7, 8 e 16 iterações, respetivamente.
Na figura 20 estão também representadas as deformadas para quatro dos pontos da trajetória.Face aos grandes deslocamentos relativos observados ao nível do primeiro piso no último ponto datrajetória — os deslocamentos estão representados em verdadeira grandeza — podemos inferir queα= 1 está perto do parâmetro de carga máximo.16 �
15Do ponto de vista prático, vale a pena dizer que, sempre que se recorre a um processo iterativo é preferível utilizar osvalores do último incremento como valores de partida a usar na primeira iteração de cada incremento.
16Esta análise pressupõe o comportamento elástico, pelo que este parâmetro de carga não deverá ser confundido com ode colapso da estrutura.
31

α
qmaxL
Figura 20: Trajetória de equilíbrio de um pórtico de dois pisos, Exemplo E18
32

5 Métodos mais avançados
5.1 Introdução
Os métodos descritos anteriormente permitem a determinação de cargas críticas e dos efeitos de se-gunda ordem com uma razoável precisão desde que a discretização seja suficientemente fina (váriossegmentos por barra comprimida) e que não sejam relevantes os grandes deslocamentos (e rotações).
Para uma perspetiva mais ampla das abordagens numéricas para a determinação do comporta-mento geometricamente não linear de pórticos, descrevem-se brevemente nesta secção alguns méto-dos numéricos mais avançados, que permitem melhor enquadrar a metodologia descrita atrás. Maisinformação pode ser obtida no livro de texto de Reis e Camotim (2012).
5.2 Equação diferencial de equilíbrio
Começa-se por obter a equação diferencial de estabilidade, pedra basilar aos métodos descritos se-guidamente. Esta sub-secção reproduz de forma resumida a derivação apresentada em Ritto Corrêa(2016).
Considere-se um troço elementar da coluna e os esforços que nele atuam, tal como representadona figura 21. O eixo x3 está alinhado com o eixo da barra indeformada, a deformação ocorre no planox2–x3 e os esforços normal e transverso estão referidos à configuração inicial, sendo, respetivamente,paralelo e perpendicular ao eixo indeformado.17 Admite-se a ausência de cargas de vão,18 pelo queos esforços N e V são constantes.
VM
N
V
N
M + dM
u2
d x3
du2
x2
x3
x1
Figura 21: Troço elementar de coluna para o estabelecimento da equação diferencial de equi-líbrio.
Escrevendo a equação de equilíbrio de momentos numa das secções do troço infinitesimal obtém-se
M + dM = M + V dx3 − N du2
Simplificando termos e dividindo por dx3 conclui-se que19
dMdx3
= V − Ndu2
dx3
17Trata-se portanto dos esforços N i e V i definidos na secção 2.2.18É o que normalmente acontece nas colunas onde os esforços normais de compressão são mais elevados e onde, con-
sequentemente, também são mais relevantes os efeitos de segunda ordem.19De notar que a derivada do momento fletor não é igual ao esforço transverso (definido perpendicularmente ao eixo
inicial, isto é V i).
33

O momento fletor pode ser relacionado com a curvatura da peça linear através da relação cons-titutiva. Admitindo que os deslocamentos são suficientemente moderados para que a curvatura sejadada pela segunda derivada do deslocamento lateral, o momento elástico é20
M = EI1R= −EI
d2u2
dx23
(22)
Substituindo na equação anterior, obtém-se
V = −EI u2,333 + N u2,3 (23)
onde se utilizou a convenção habitual de usar ( ),3 para representar derivadas em ordem a x3. Deri-vando esta equação em ordem a x3, o esforço transverso constante desaparece, pelo que se obtém aequação diferencial de quarta ordem
EI u2,3333 − N u2,33 = 0 (24)
que será a base das análises a realizar nas próximas secções.
5.3 Funções de forma e a matriz de rigidez geométrica consistente
Na secção 2 o equilíbrio na configuração deformada foi assegurado unicamente com forças geomé-tricas horizontais, as quais dependiam unicamente da inclinação da corda (∆L ). Quando a barra estáfletida a inclinação não é constante e esse efeito simplesmente não era contemplado, situação quese pretende agora corrigir, recorrendo a uma formulação variacional que tem em conta a inclinaçãoda deformada.
Comece-se por multiplicar a equação (24) por um deslocamento virtual δu2 e integre-se no com-primento da barra
∫ L
0
�
EI u2,3333 − N u2,33
�
δu2 dx3 = 0
Uma integração por partes leva a
−∫ L
0
EI u2,333 δu2,3 dx3 +
∫ L
0
N u2,3 δu2,3 dx3 +��
EI u2,333 − N u2,3
�
δu2
�L0 = 0
O parêntesis no termo de fronteira é reconhecido como o trabalho esforço transverso, ver (23).Realizando uma segunda integração de partes na primeira parcela leva a
∫ L
0
EI u2,33 δu2,33 dx3 +
∫ L
0
N u2,3 δu2,3 dx3 + [−V δu2]L0 +
�
−EI u2,33 δu2,3
�L0 = 0
onde reconhecemos o trabalho do momento no termo de fronteira, pelo que, definindo θ = −u2,3,podemos escrever
∫ L
0
EI u2,33δu2,33 dx3 +
∫ L
0
N u2,3δu2,3 dx3 = [V δu2]L0 + [M δθ]
L0 (25)
Os termos do lado direito são as forças e momentos de extremidade, enquanto os termos dolado esquerdo dão origem à matriz de rigidez — parcela elástica e geométrica. Evidentemente quea obtenção destas matrizes requer o conhecimento das funções u2(x3) e δu2(x3).
Para uma barra elástica linear sem cargas de vão, o deslocamento transversal é uma combinaçãolinear dos quatro polinómios de Hermite, os quais estão definidos e representados na figura 22,
u2 =4∑
i=1
ψi di (26)
34

ψ2(ξ) = L(ξ3 − 2ξ2 + ξ)ψ1(ξ) = 2ξ3 − 3ξ2 + 1 ψ3(ξ) = −2ξ3 + 3ξ2 ψ4(ξ) = L(ξ3 − ξ2)
d1 = 1 d2 = 1 d3 = 1 d4 = 1
L
x3
ξ= x3L
Figura 22: Polinómios de Hermite.
onde di são os quatro deslocamentos independentes. Considerando que o deslocamento virtual éobtido de uma forma análoga,
δu2 =4∑
j=1
ψi δd j
e admitindo um esforço axial de compressão, N = −P, os dois integrais de (25) são dados por
4∑
i=1
4∑
j=1
�
K ei j − K g
i j
�
di δd j
com
K ei j =
∫ L
0
EIψi,33ψ j,33 dx3 K gi j =
∫ L
0
Pψi,3ψ j,3 dx3 (27)
A matriz elástica K e é novamente a matriz de rigidez elástica conhecida da análise linear de estru-turas, enquanto que as integrações cruzadas das derivadas ψi,3 conduzem agora à seguinte matrizde rigidez geométrica:
K g = P
65L
110 − 6
5L110
110
2L15 − 1
10 − L30
− 65L − 1
106
5L − 110
110 − L
30 − 110
2L15
(28)
Esta matriz de rigidez geométrica é dita consistente por usar a mesma interpolação que aquela queserve para calcular a matriz elástica.21 Na figura 23 estão representados as forças e momentos deorigem geométrica para um deslocamento transversal d3 = ∆ e uma rotação d4 = θ . Deixa-secomo exercício verificar que estas forças e momentos (em conjunto com a compressão P) estão emequilíbrio.
Na posse desta nova expressão para a matriz de rigidez geométrica, a determinação de cargascríticas ou a análise de segunda ordem é feita de uma forma análoga ao explicado nas secções 3 e 4,sendo relevantes as seguintes observações:
(i) As forças e momentos de extremidade, obtidas através da matriz de rigidez geométrica consis-tente, permitem garantir o equilíbrio global (externo) do elemento de barra na configuraçãodeformada, mas, tal como as obtidas a partir da primeira versão da matriz K g , não correspon-dem à solução exacta do problema.
20O sinal negativo tem em conta os sentidos positivos admitidos: uma curvatura com concavidade para a direitacaracteriza-se por u2,33 < 0 e corresponde a um momento positivo de acordo com a convenção habitual de esforços.
21Em contrapartida, a matriz definida em (8) pode também ser calculada usando funçõesψ1 eψ3 lineares e as restantesnulas.
35

P
6P5L∆
P ∆
6P5L∆
P10∆
P10∆
P
θ
P10θ
2P L15 θ
PP L30 θ
P10θ
Figura 23: Interpretação das forças e momentos correspondentes à matriz de geométrica con-sistente
(ii) Os resultados são melhores considerando vários segmentos por barra, sendo a convergênciamais rápida com a versão consistente do que com a matriz não consistente. Pode mostrar-seque, de uma forma geral, basta dividir cada barra em três segmentos para obter resultadosrelativamente precisos para a carga crítica.
(iii) Numa análise de segunda ordem, o traçado dos diagramas de esforços deve ser feito com basenas forças de extremidade de cada elemento — obtidas através do produto (K e − Kq)d. Umaforma simples de o fazer é proceder por equilíbrio usando os esforços de extremidade relativosà corda: os momentos de extremidade e os esforços transversos relativos à corda (V c calculadoscomo na equação (4)).22
(iv) A obtenção da matriz de rigidez geométrica consistente foi aqui sem feita sem considerar cargasde vão, mas, embora se perca um pouco da «consistência», é possível usá-la mesmo na presençade cargas de vão, continuando a verificar-se o equilíbrio externo na configuração deformada.
(v) Observe-se ainda que, como a matriz de rigidez geométrica consistente envolve momentos deextremidade, já não é fácil condensar os correspondentes graus de liberdade.23
5.4 Funções de estabilidade
A matriz geométrica consistente admite deslocamento transversal de forma polinomial, o que corres-ponde à solução exata do problema linear. Porém, a solução da equação diferencial de estabilidade(24) de uma coluna comprimida com N = −P, não é um polinómio, mas sim da forma
u2(x3) = C1 sen kx3 + C2 cos kx3 + C3 x3 + C4 com k =Ç
PEI
Impondo as condições de fronteira relevantes é possível escrever o deslocamento transversal na forma(26), desde que as funções de forma sejam agora dependentes de P e dadas por24
ψ1 =sen kL
Asen kx3 +
BA
cos kx3 −k sen kL
Ax3 −
A− BA
ψ2 =A− B
kAsen kx3 +
CkA
cos kx3 +BA
x3 −CkA
ψ3 = −sen kL
Asen kx3 −
BA
cos kx3 +k sen kL
Ax3 −
BA
ψ4 = −BkA
sen kx3 +DkA
cos kx3 +BA
x3 −DkA
22Com a matriz K g consistente não é possível calcular os esforços com base apenas nas forças elásticas como foi feitono final da secção 2.2.
23Nesse sentido, conduz a soluções manuais mais trabalhosas, o que pode ser compensado pela maior precisão para omesmo número de segmentos. Por outro lado, numa implementação computacional não existe acréscimo significativo decálculos por se usar a versão consistente da matriz de rigidez geométrica.
24Ver Reis e Camotim (2012).
36

onde as constantes A a D valem
A= 2(cos kL − 1) + kL sen kL, B = cos kL − 1, C = kL cos kL − sen kL, D = sen kL − kL
Estas funções respeitam, por construção, os deslocamentos unitários impostos (em cada ψi tem-sedi = 1 e d j = 0 para i 6= j) e tendem naturalmente para os polinómios de Hermite, quando P tendepara zero. Na figura 24 mostra-se o andamento de ψ1 e ψ2 para diversos níveis de P/PE , onde PEé a carga de Euler de uma barra
PE =π2EI
L2
As funções ψ3 e ψ4 são análogas, mas envolvendo deslocamentos unitários na outra extremidade.Enquanto ψ1 é pouco dependente de P, a função ψ2 «explode» quando P se aproxima de 4PE ,
valor que corresponde à carga crítica da barra bi-encastrada.
ψ1 ψ2
x3L
x3L
PPE= 3.5
321
0
Figura 24: Funções de interpolação exatas
A matriz de rigidez total, é calculada somando as integrações definidas em (27) utilizando estasnovas funções de forma, tornando-se uma função não linear de P, podendo ser expressa na seguinteforma25
K t =
12EIL3 φ1
6EIL2 φ2 −12EI
L3 φ16EIL2 φ2
6EIL2 φ2
4EIL φ3 −6EI
L2 φ22EI
L φ4
−12EIL3 φ1 −6EI
L2 φ212EI
L3 φ1 −6EIL2 φ2
6EIL2 φ2
2EIL φ4 −6EI
L2 φ24EI
L φ3
(29)
na qual se utilizam as assim chamadas funções de estabilidade (Livesley e Chandler, 1956) definidaspor
φ1 = βφ2 cotβ φ2 =β2
3(1− β cotβ)φ3 =
34φ2 +
14β cotβ φ4 =
32φ2 −
12β cotβ
todas calculadas a partir de um parâmetro que depende de P,
β =kL2=π
2
√
√ PPE
O gráfico da figura 25 mostra o andamento das quatro funções. Quando P tende para zero, todas asfunções de estabilidade tendem para 1 e, consequentemente, a matriz de rigidez tende para a matriz
37

φ1
φ2
φ3
φ4
PPE
Figura 25: Funções de estabilidade
elástica da análise linear. Por outro lado, pode mostrar-se que a derivada da matriz K t em ordem aP é (o simétrico de) a matriz de rigidez geométrica consistente.
A determinação de cargas críticas e análise de segunda ordem podem ser feitas com base nestamatriz de rigidez total, observando-se:
(i) Como esta formulação assenta na solução exata da equação diferencial, não é necessário dividircada coluna em vários segmentos. De facto, basta um elemento por barra para obter resultadosexatos.
(ii) Para obter a carga crítica é necessário determinar qual o valor do parâmetro de carga parao qual se anula o determinante da matriz de rigidez total, que, como vimos, é uma funçãobastante não linear de P. A determinação de αcr deve ser feita aplicando o método de Newtonà equação característica (não polinomial), não sendo aplicáveis os métodos para problemaslineares de valores e vetores próprios.
(iii) Esta formulação não deve ser usada havendo cargas de vão, já que, perdendo-se o carácterexato — a equação diferencial (24) só é válida se N e V forem constantes —, não vale a penaa complexidade acrescida.
Uma descrição mais aprofundada desta formulação pode ser encontrada em Reis e Camotim(2012).
5.5 A formulação co-rotacional
As formulações apresentadas anteriormente, estando sempre expressas em função do deslocamentotransversal medido perpendicularmente ao eixo inicial da barra, só são válidas para pequenas rota-ções. Por exemplo, as equações (22), (23) e (24) deixam de constituir boas aproximações quandoa magnitude das rotações é tal que o deslocamento transversal ao eixo deformado envolve umacombinação dos deslocamentos u1 e u2.26
Para a determinação de cargas críticas de colunas ou mesmo de pórticos é normalmente razoávelnão considerar o efeito de rotações moderadas já que a bifurcação crítica ocorre num ponto da
25Como as funções de forma dependem agora de P, a primeira integração que correspondia a K e, também depende deP, pelo que não é interessante calcular individualmente cada uma das parcelas.
26Neste sentido, a qualificação «exata» atribuída atrás à formulação usando funções de estabilidade deve ser entendidano devido contexto.
38

trajetória fundamental para os quais os deslocamentos são de facto muito pequenos.27 Já paraa obtenção de trajetórias de equilíbrio, é no mínimo questionável desprezar este efeito. Existeminúmeras formulações geometricamente não lineares que permitem obter computacionalmente como rigor requerido qualquer trajetória não linear. Uma das mais simples é a formulação co-rotacionalcujos fundamentos se apresentam de seguida.
Nesta sub-secção procura-se (i) enunciar as hipóteses consideradas (ii) identificar as principaisequações envolvidas e (iii) descrever abreviadamente o método de resolução. O principal objetivoé essencialmente o de permitir contextualizar as outras formulações já consideradas e não o de daruma descrição detalhada, a qual pode ser encontrada em Crisfield (1991). Por outro lado, defineclaramente qual a formulação que está na base de alguns dos resultados apresentados na próximasub-secção.
u
l0
l0
l
q1
q2
q3
q4
q5
q6
θ1
θ2
p0
p
inicial
deformada
α
c
configuração
configuração
e1
e2
Figura 26: Formulação co-rotacional. Os graus de liberdade q (independentes) estão identifi-cados na configuração inicial e os graus de liberdade co-rotacionais qc (dependen-tes) estão representados na configuração deformada.
A formulação co-rotacional baseia-se na divisão de cada barra em vários segmentos e na es-crita das equações governativas de cada segmento em relação à corda da configuração deformada.Na figura 26 ilustra-se a ideia: uma barra (segmento) é submetida a um movimento envolvendouma grande rotação de corpo rígido mas pequenas deformações. Note-se que, atendendo à granderotação, não é possível classificar os deslocamentos de extremidade em dois grupos, um relativo àdeformação axial e ao esforço normal e outro à flexão da barra, como acontecia em todas as formula-ções anteriores.28 Mas, admitindo que as deformações são pequenas, é possível utilizar as equaçõesda análise linear, desde que se considere um referencial móvel que roda continuamente com a cordada barra, daí a designação de co-rotacional.
Se l0 é um vetor unindo as posições iniciais das duas extremidades da barra, a configuraçãodeformada desse vetor é
l = l0 + (q4 − q1)e1 + (q5 − q2)e2
27Esta consideração aplica-se a problemas envolvendo a instabilidade bifurcacional, não a instabilidade por ponto limite(snap-through) como é característico de estruturas em arco.
28Por esta razão os deslocamentos de extremidade com a barra são logo designados por q , não havendo necessidade deintroduzir os deslocamentos d como passo intermédio — ver nota de rodapé 3 na página 10.
39

O comprimento da barra antes e depois da deformação são designados por
l0 =Æ
l0 · l0 l =p
l · l
Sejam p0 e p dois versores perpendiculares respetivamente a l0 e l e c = l/l o versor da cordadeformada.29 Então, os deslocamentos locais — em relação ao referencial co-rotacional — são (verfigura 26)
u= l − l0 θ1 = q3 −α θ2 = q6 −α com α= arcsin(c · p0)
Registe-se o carácter não linear destes cálculos que não têm qualquer paralelo nas formulações an-teriores. Note-se em particular que as rotações locais θ1 e θ2 dependem das rotações nodais q3 eq6, mas também da rotação da corda, a qual por sua vez é dependente dos deslocamentos q1, q2,q4 e q5. Além disso, o deslocamento axial necessita do cálculo do comprimento do vetor l, que é,bem entendido, uma função não linear dos deslocamentos q . Por outro lado, como o referencialco-rotacional acompanha sempre a corda, não existem deslocamentos transversais à corda.
Uma das vantagens desta formulação é que toda a não linearidade é tratada na transformaçãoentre deslocamentos globais e locais (co-rotacionais), admitindo-se o comportamento elástico linearno interior da barra. No que se segue, para manter a simplicidade da formulação, não se consideramcargas de vão.30 Assim às deformações locais correspondem os esforços elásticos, ainda relativos aoreferencial co-rotacional, dados por
N
M1
M2
=
EAl0
0 0
0 4EIl0
2EIl0
0 2EIl0
4EIl0
u
θ1
θ2
ou, de forma condensada,
Qc = kceqc
onde o «c» significa co-rotacional e o «e» identifica a rigidez elástica.A variação das deformações qc pode ser relacionada com a variação dos deslocamentos nodais
de extremidade q através de
δqc = B1δq
onde B1 é uma matriz que depende da configuração atual31
B1 =
−c1 −c2 0 c1 c2 0
p1/l p2/l 1 −p1/l −p2/l 0
p1/l p2/l 0 −p1/l −p2/l 1
Para recuperar as forças nodais Q1 a Q6 correspondentes aos seis graus de liberdade q1 a q6recorre-se à equivalência dos trabalhos virtuais
Q ·δq = Qc ·δqc = Qc · B1δq = BT1Qc · δq ⇒ Q = BT
1Qc
29A duas dimensões, para obter um vetor perpendicular a l = l1e1 + l2e2 basta fazer y = −l2e1 + l1e2.30Para que esta formulação dê bons resultados é sempre necessário subdividir cada barra (coluna ou viga) em vários
segmentos de barra. Por isso é relativamente fácil distribuir as cargas de vão pelos nós intermédios.31A dedução desta matriz (e de outras que se seguem) pode ser encontrada em Crisfield (1991), embora numa notação
consideravelmente distinta.
40

Esta relação é não linear, já que B1 é dependente da configuração. A sua linearização envolve32
∆(Q ·δq) =∆(Qc ·δqc)
∆Q ·δq =∆Qc ·δqc +Qc ·∆δqc
∆Q ·δq = kce∆qc · B1δq +Qc ·∆B1(∆q) δq
∆Q ·δq = BT1 kce B1∆q ·δq + K g(Qc)∆q ·δq
onde a matriz K g(Qc) é definida da seguinte forma
K g(Qc) = BT2 kg B2
B2 =
�
−1 0 0 1 0 0
0 −1 0 0 1 0
�
kg =Nl(1− c ⊗ c) +
M1 +M2
l2(p ⊗ c + c ⊗ p)
Tem-se, portanto, a relação incremental
∆Q = K t∆q
na qual a matriz tangente K é da forma
K = K e + K g = BT1 kceB1 + BT
2 kg B2
Existem semelhanças visíveis com o formato das formulações baseadas na definição de uma matriz derigidez geométrica, mas há que ter em conta que, nesta formulação co-rotacional, ambos as parcelasda matriz de rigidez são dependentes da configuração.
As contribuições Q e K das várias barras devem ser somadas, de acordo com as suas incidências,num vetor global Q e numa matriz tangente global K .33 A solução do problema estrutural não linearpode ser obtida pelo método de Newton. Neste método iterativo, com base numa determinadaconfiguração definida pelas variáveis globais q , são calculadas as forças nodais e matriz tangentecomo descrito atrás. A próxima correção às variáveis globais é a solução da seguinte expansão emsérie
Q+ K∆q + . . .= 0 ⇒ ∆q = −K−1
Q
O processo é repetido ate se verificar a convergência.Atendendo ao processo iterativo e à relativa complexidade das expressões, envolvendo matrizes
que mudam de iteração para iteração, esta formulação não é apropriada para cálculos manuais,mesmo quando se consideram poucos graus de liberdade.
5.6 Comparação entre as diversas abordagens
Para ilustrar a influência da formulação adotada nos resultados obtidos, apresentam-se exemplos.Inicialmente estuda-se uma simples consola para ser possível o cálculo manual, e depois apresentam-se alguns resultados, obtidos por via numérica, de uma estrutura com dezenas de graus de liberdade.
32Para a matriz tangente é necessário distinguir duas variações: no sentido incremental (∆) e no sentido virtual (δ).Em relação às variáveis principais q , admite-se que as suas variações virtuais são totalmente independentes e logo tem-se∆δq = 0. O mesmo não se pode dizer das variáveis co-rotacionais qc que são dependentes, pelo que é necessário calcular∆δqc . Como a matriz B1 depende da configuração, a sua linearização depende de ∆q e é possível manipular o últimotermo de forma a dar origem a um termo geométrico, dependente dos esforços co-rotacionais. Nesta descrição abreviadanão se mostram os passos detalhados para obter K g(Qc).
33Para não sobrecarregar a exposição os deslocamentos nodais, as forças nodais e a matriz tangente de cada barra foramdesignados respetivamente por q , Q e K . A barra por cima designa então as correspondentes grandezas para a totalidadeda estrutura, incluindo-se em Q também a contribuição das forças nodais.
41

Exemplo E19: Carga crítica de uma consola. Comparação dos resultados de diversas formu-lações. Este exemplo, consiste na consola já analisada na secção 2. Considera-se apenas um seg-mento e, como nem todas as formulações permitem a condensação da rotação do topo da consola,tomam-se para deslocamentos independentes o deslocamento horizontal e a rotação da extremidadesuperior, tal como representado na figura 27.
P
L
q1
q2
F
EI
Figura 27: Análise de uma Consola, Exemplo E19. Graus de liberdade.
As equações de equilíbrio para cada uma das formulações escrevem-se
12EIL3 − P
L6EIL2
6EIL2
4EIL
�
q1
q2
�
=
�
F
0
�
matriz geométrica simples
12EIL3 − 6P
5L6EIL2 − P
10
6EIL2 − P
104EI
L −2P15L
�
q1
q2
�
=
�
F
0
�
matriz geométrica consistente
12EIL3 φ1
6EIL2 φ2
6EIL2 φ2
4EIL φ3
�
q1
q2
�
=
�
F
0
�
funções de estabilidade
Para obter a carga crítica, procura-se o (mais baixo) valor de P que anula o determinante. Fa-zendo λ= P L2
EI ,
EIL4 [4 (12−λ)− 36] = 0⇒ λ= 3,00000 matriz geométrica simples
EIL4
�
�
12−6λ5
��
4−2λ15
�
−�
6−λ
10
�2�
= 0⇒ λ= 2,48596 matriz geométrica consistente
EIL4
�
48φ1φ3 − 36φ22
�
= 0⇒ λ= 2,46740 funções de estabilidade
Nos dois primeiros casos a solução é facilmente obtida por via analítica (resolução de uma equaçãolinear ou quadrática, nesta última toma-se para solução a menor raiz), no terceiro caso a solução foiobtida numericamente, tendo em conta que todas as funções de estabilidade são função do parâmetroβ que por sua vez se relaciona com λ através de β =
pλ
2 .Na figura 28 representa-se o determinante da matriz em cada uma das formulações, podendo
observar-se que a curva obtida com a matriz geométrica consistente é muito próxima da obtidarecorrendo às funções de estabilidade (exata). Em consequência, a carga crítica obtida com a matrizconsistente também está muito próxima da verdadeira. Em contrapartida, a formulação usando amatriz geométrica mais simples obtém um valor, coincidente com o já obtido em (13), não muitoaproximado.
A comparação pode também ser feita em termos do comprimento de encurvadura, o qual facil-
42

funções estabilidadeK g consistente
K g simples
Figura 28: Determinante da matriz de rigidez. Exemplo E19
mente se relaciona com λ,
P =π2EI
L2e
⇒Le
L= π
√
√ EIP L2
=πpλ=
1,8138 matriz geométrica simples1,9925 matriz geométrica consistente2,0000 funções de estabilidade
Relativamente à formulação co-rotacional note-se que ela é sobretudo indicada para obter traje-tórias de equilíbrio e não tanto para determinar cargas de bifurcação. Em todo o caso diga-se que,neste caso particular, usando apenas um único elemento co-rotacional para toda a coluna34, impondoa anulação do determinante da matriz tangente, calculada para um ponto da trajetória fundamental,levaria à carga crítica λ = 3, valor igual ao obtido com a formulação usando a matriz geométricamais simples. �
Exemplo E20: Análise de segunda ordem de uma consola. Comparação dos resultados de di-versas formulações. Considere-se agora a análise de segunda ordem relativa à consola do exemploanterior. Admita-se P = 2EI
L2 (λ= 2, inferior ao valor crítico) e dois níveis de intensidade para a forçahorizontal F = EI
10L2 e F = EIL2 . Além disso, admite-se a rigidez axial EA= 20000 EI
L2 .A tabela 6 mostra o deslocamento horizontal do topo obtido com as várias formulações e con-
siderando a coluna dividida em um ou dez segmentos. Para as formulações baseadas na matrizgeométrica e apenas um segmento, estes resultados são facilmente obtidos utilizando as equaçõesde equilíbrio apresentadas no exemplo anterior. Já para a formulação co-rotacional, mais complexae envolvendo um processo iterativo, foi usado um programa de cálculo; o mesmo acontecendo paraas outras análises com 10 segmentos. Note-se ainda que a formulação co-rotacional exige sempre aconsideração do deslocamento vertical. Na figura 29 estão representadas algumas das deformadas(em verdadeira grandeza). Observa-se que:
(i) Os resultados de uma análise linear não dependem do número de segmentos, como esperado.
(ii) Como o valor de P está fixo, os deslocamentos horizontais são proporcionais à força horizontalF nas formulações baseadas na matriz de rigidez geométrica (e também obviamente na análiselinear). Por outro lado, nestas formulações os deslocamentos verticais devem-se unicamenteà rigidez axial da coluna e são muito pequenos. Como consequência, para a força F maior acoluna parece aumentar de comprimento.
(iii) Nas formulações baseadas na matriz de rigidez geométrica, a versão consistente precisa de ummuito menor número de segmentos. Neste exemplo, os resultados da versão consistente comapenas um segmento são quase tão bons como os obtidos com 10 segmentos na versão simples.
34Seriam necessários três graus de liberdade já que o deslocamento vertical do topo tem que ser incluído.
43

(iv) A formulação co-rotacional é a única que considera a interação entre as componentes horizontale vertical dos deslocamentos. Por essa razão, apenas as deformadas desta formulação mostramo deslocamento vertical devido à curvatura da coluna, evidenciando comprimentos dos eixosdeformados sensivelmente iguais ao comprimento da coluna.
(v) A formulação co-rotacional admite que cada um dos seus segmentos tem comportamento linear(relativamente à corda). É particularmente visível que com apenas um segmento e a força Fmais pequena esta formulação conduz a um comportamento demasiado rígido. Já com 10segmentos essa rigidez excessiva desaparece. Curiosamente com a força F maior este efeito émenos pronunciado.
(vi) Quando o ponto e aplicação da força F desce consideravelmente, como tido em conta na for-mulação co-rotacional, o momento fletor na base também diminui. É isso que explica a menorcurvatura prevista por esta formulação.
�
Tabela 6: Deslocamento horizontal q1L numa consola, de acordo com diversas formulações.
Exemplo E20
q1L número F = EI
10L2 F = EIL2
segmentos
análise linear 1 0,0333 0,333310 0,0333 0,3333
mat. geom. simples 1 0,1000 1,000010 0,1724 1,7240
mat. geom. consistente 1 0,1697 1,697010 0,1739 1,7394
co-rotacional 1 0,0990 0,626910 0,1620 0,6145
co-rotacional (1 elemento)
co-rotacional (10 elementos)
consistente (1 elemento)
deslocamento q1L
F = EIL2
F = EI10L2
matriz rigidez geométrica
Figura 29: Deformadas da consola. Exemplo E20
44

Exemplo E21: Análise de segunda ordem pela formulação co-rotacional de um pórtico de doispisos com vigas flexíveis e colunas divididas em dez segmentos. Retome-se o Exemplo E14,da figura 15 na página 25, analisado agora pela formulação co-rotacional, usando 10 segmentos porcoluna. A figura 30 mostra a comparação de deformadas obtidas com esta formulação e com a matrizde rigidez geométrica (versão simples, considerando também 10 segmentos).
Para este nível elevado de forças horizontais, as diferenças — sobretudo as observadas no pisoinferior — são substanciais, sendo válidos o mesmo tipo de comentários emitidos atrás a propósitoda análise da consola, que deste modo se podem considerar representativos. �
Figura 30: Deformadas de pórtico. Exemplo E21
5.7 Estruturas 3D
Finalmente, note-se que todos os métodos e exemplos apresentados se referem a estruturas planas.Muitos dos conceitos discutidos são também válidos para estruturas tridimensionais, mas existemaspectos específicos do comportamento tridimensional, não abordados aqui, que necessitam de sertidos em conta, nomeadamente:
(i) O tratamento das rotações finitas tridimensionais é consideravelmente mais complicado, jáque perdem o seu carácter aditivo (a composição de rotações finitas tridimensionais não écomutativa, por exemplo).
(ii) A torção de barras com secção transversal de parede fina, exige a consideração explícita doempenamento. A torção não uniforme destas barras é particularmente importante para estudaro seu comportamento geometricamente não linear.
45

6 Métodos aproximados
6.1 Introdução
Nesta secção referem-se métodos que permitem obter uma estimativa da carga crítica ou dos efeitosde segunda ordem com base em análises lineares (de primeira ordem). Estes métodos são de aplicaçãolimitada, mas têm grande utilidade prática para pórticos regulares de edifícios. Para estas estrutu-ras o comportamento geometricamente não linear está essencialmente associado a deslocamentoshorizontais dos pisos, facto do qual os métodos descritos de seguida tiram partido.
6.2 Método de Horne para determinação de cargas críticas
O método de Horne (1975) é aplicável a estruturas do tipo pórtico e assenta no facto de, nestasestruturas, os modos de instabilidade concentrarem os deslocamentos relativos num piso particu-lar.35 É frequente o modo crítico envolver a deformação lateral dos pilares do nível inferior, mas,dependendo da distribuição das cargas verticais e das alturas entre pisos, pode acontecer que o pisocrítico seja outro, pelo que é necessário verificar todos os níveis.36
Para um nível genérico, uma estimativa da carga crítica pode ser obtida novamente recorrendoao conceito de rigidez geométrica, tal como se ilustra na figura 31.
∆
Fe = K∆ Fg =∑
i αPi∆h
αP1αP2
h
Figura 31: Método de Horne. Dedução com base na rigidez geométrica. A figura é algo esque-mática: as cargas verticais Pi são o esforço axial de compressão no topo de cadatroço de pilar, incluindo as transmitidas pela viga superior representada.
Como estamos interessados na carga crítica, admitimos que as cargas verticais aplicadas sãomultiplicadas por um parâmetro de carga α e não consideramos as cargas horizontais aplicadas. Asoma das cargas transmitidas por todos os pilares, incluindo as que vêm das vigas do piso superior,é
V =∑
i
Pi
pelo que se h for a altura do piso e∆ for o deslocamento relativo entre pisos a força geométrica total,
35Ver o Exemplo E8 e o Exemplo E10, especialmente a figura 10 na página 18.36Em situações muito particulares o modo crítico não envolve deslocamentos laterais de qualquer piso. É o que acontece
se existe uma coluna isolada particularmente esbelta que instabiliza sozinha. Veja-se o Exemplo E9, onde o modo deinstabilidade obtido, representado na figura 9(b), página 17, não apresenta deslocamentos horizontais do piso. Nessecaso isso deve-se ao comprimento excessivo da coluna, mas o mesmo podia acontecer devido a um elevado esforço axialou a uma rigidez de flexão muito baixa. O método de Horne não se aplica a qualquer desses casos. De resto, também nãoé aplicável ao exemplo referido, pois no método de Horne as colunas de cada piso têm que ter todas a mesma altura.
46

já considerando o parâmetro de carga α, vale
Fg = −∑
i
αPi∆
h= −αV
∆
h
Por outro lado, a força elástica transmitida pelo piso é proporcional ao deslocamento ∆, podendoser expressa como
Fe = K∆
Se o modo de instabilidade envolve o deslocamento relativo do piso, então a rigidez total lateral dopiso é nula, pelo que
Fe + Fg =�
K −αVh
�
∆= 0 ⇒ α=KhV
Havendo vários pisos, uma estimativa da carga crítica pode ser obtida escolhendo o mínimo dosvalores correspondentes a cada um dos pisos. Do ponto de vista prático, uma forma simples de obtera rigidez horizontal de cada piso consiste em:
(i) aplicar cargas horizontais proporcionais às cargas verticais de cada piso, de modo a terHi = mVi , onde m é uma valor arbitrário,37 por exemplo m= 1
100 ;
(ii) realizar uma análise linear e calcular os deslocamentos relativos de cada piso ∆i , isto é, calcu-lando a diferença entre o deslocamento do piso superior e inferior respeitantes a um determi-nado nível de colunas;
(iii) calcular Ki =Hi∆i
.
Assim, obtemos para parâmetro crítico,38
αcr =mini
Kihi
Vi=min
i
Hi
∆i
hi
Vi=min
i
mVi
Vi
hi
∆i= m min
i
hi
∆i
Vimos anteriormente que a obtenção da carga crítica com base na versão mais simples da matrizde rigidez geométrica não é muito precisa, facto que tem inevitavelmente repercussão nesta fór-mula. Se a deformabilidade do pórtico for conseguida essencialmente à custa da flexão das vigas,comportando-se as colunas quase como barras rígidas — e, consequentemente, os termos P ∆L sãouma muito boa aproximação da rigidez geométrica —, então a fórmula anterior é razoavelmenteprecisa. Pelo contrário, na situação mais comum em que a rigidez das vigas é muito superior à dascolunas, então o diagrama de momentos de segunda ordem é consideravelmente diferente do obtidonuma análise de primeira ordem e a fórmula anterior pode subestimar a carga crítica em mais de20% (como acontecia no problema da consola). Por este motivo, se se pretende uma melhor estima-tiva é preferível dividir o resultado da fórmula por um factor compreendido ente 1.0 e 1.22, sendo1,1 um valor intermédio recomendado.
Exemplo E22: Carga crítica de um pórtico de um vão com todas as barras iguais. Retome-seo Exemplo E2 da página 12 e utilize-se o método de Horne para estimar o parâmetro crítico.
Havendo só um piso, basta aplicar uma força horizontal qualquer — o método de Horne requerque as forças horizontais sejam proporcionais às cargas verticais, mas para um piso essa condição é
37Note-se que como se recorre a uma análise linear é perfeitamente irrelevante o valor de m. A utilização de uma fraçãopequena como m = 1
100 tem por único objetivo que os deslocamentos horizontais obtidos não sejam desproporcionada-mente grandes. Mas, de facto, todo o propósito da aplicação da metodologia referida é apurar a rigidez do piso face aforças horizontais — os deslocamentos propriamente ditos são totalmente fictícios.
38No eurocódigo 3 (CEN, 2005) a expressão fornecida para o cálculo aproximado do parâmetro crítico é αcr =HV
h∆ .
47

sempre trivialmente satisfeita — por exemplo Q1 = 1. A análise linear do pórtico — sem portantoqualquer consideração dos termos geométricos — conduz a
EIL3
24 6L 6L
6L 8L2 2L2
6L 2L2 8L2
q1
q2
q3
=
1
0
0
⇒
q1
q2
q3
=
L2
EI
0.0595 L
−0.0357
−0.0357
Evidentemente, também podemos recorrer à condensação dos graus de liberdade de rotação já ante-riormente considerada, a qual permite obter o mesmo resultado de uma forma muito mais imediata
16,8EIL3
q1 = 1 ⇒ q1 =L3
16,8 EI= 0,0595
L3
EI
Em qualquer dos casos, a estimativa da carga crítica (sem fator de correção) é
αcr =mini
Hi
∆i
hi
Vi=
1
0,0595 L3
EI
L2P=
16,8 EIL3
L2P= 8,4
EIP L2
o qual coincide exatamente com o obtido com a matriz rigidez geométrica, no Exemplo E2. Esteresultado não deve causar surpresa pois o método de Horne baseia-se exatamente nas mesmas hipó-teses simplificativas que a matriz geométrica simples.
Se aplicarmos o factor de correção de 1,1, somos conduzidos a
αcr =8,41,1
EIP L2
=7,64EI
P L2
Comparando estes valores com o exato (7,379EIP L2 ), referido no Exemplo E5, na página 15, verificamos
que a aplicação do coeficiente 1,1 permitiu reduzir o erro de 13.8% para 3.5%. �
Exemplo E23: Carga crítica de um pórtico de dois pisos com vigas rígidas. Considere-se nova-mente o Exemplo E4, página 13. Cada piso tem um carregamento total de 2P, pelo que considerare-mos forças horizontais em cada piso iguais a um centésimo desse valor, isto é, vamos adotar m= 1
100 .Então, recuperando a matriz de rigidez elástica apresentada antes, a análise linear a realizar consisteem
EIL3
�
48 −24
−24 48
��
q1
q2
�
=
2P100
2P100
⇒
�
q1
q2
�
=L3
EI
P600
P400
Os deslocamentos horizontais registado entre dois pisos consecutivos são
∆1 = q1 =P L3
600EI∆2 = q2 − q1 =
P L3
400EI−
P L3
600EI=
P L3
1200EI
A estimativa da carga crítica é então
αcr = m mini
hi
∆i=
1100
min
¨
LP L3
600EI
,L
P L3
1200EI
«
=EI
P L2min {6,12}=
6EIP L2
que coincide mais uma vez com o valor obtido anteriormente. É aliás interessante observar que asduas cargas de bifurcação aparecem como argumentos da função mínimo. �
48

6.3 Fatores de amplificação
Comecemos por fazer duas observações qualitativas que são mais ou menos intuitivas. Para valoresdo carregamento muito inferiores ao crítico não existe grande diferença entre os resultados (deslo-camentos ou esforços) obtidos numa análise de segunda ordem relativamente aos de uma análiseprimeira ordem. Por outro lado, quanto mais nos aproximamos da carga crítica, mais os desloca-mentos e esforços aumentam de uma forma descontrolada. Então deverá ser possível relacionar osresultados de primeira e segunda ordem, através de um fator de amplificação obtido com base narelação entre o parâmetro de carga α= 1 e o correspondente valor crítico.
Por exemplo, no problema da consola, considerado anteriormente nas secções 2.1, 3.1 e 4.1,com base na estimativa da carga crítica obtida em (13)39, αcr =
3EIP L2 , é ainda possível rescrever o
deslocamento e momento na base, obtidos em (2) e (3), na forma sugestiva40
∆=1
1− 1αcr
∆0 M =1
1− 1αcr
M0 (30)
onde ∆0 e M0 representam os valores obtidos numa análise de primeira ordem (e para o carrega-mento efetivamente aplicado, isto é, para α= 1)
∆0 =F L3
3EIM0 = F L
A relação entre os deslocamentos e esforços obtidos numa análise linear e os obtidos numa análisede segunda ordem reside em qualquer dos casos no fator de amplificação
β =1
1− 1αcr
Contudo, esta amplificação não afeta todos os resultados da análise. Por exemplo, o esforço axialna base é
N = N0 = −P
independentemente de se realizar uma análise de primeira ou segunda ordem. De resto, também odeslocamento vertical do topo da coluna depende apenas da rigidez axial da coluna e é idêntico nosdois tipos de análises.41
Embora estes resultados tenham sido obtidos no contexto da análise da consola é expectável queeles também se apliquem de algum modo a outros problemas. O método de amplificação dos efeitossway que se aborda de seguida aplica-se a pórticos regulares e identifica de uma forma simples quaisos efeitos que devem ser amplificados.
6.4 Método da amplificação dos efeitos sway
No caso de estruturas em pórtico, cuja instabilidade se caracteriza por deslocamentos horizontaisdos pisos, é conveniente distinguir os efeitos das ações — sejam eles deslocamentos, esforços ouqualquer outra grandeza — em duas parcelas:
efeitos sway : aqueles que estão associados aos deslocamentos laterais42 do pórtico. Se o pórtico forsimétrico e as cargas verticais estiverem simetricamente distribuídas, os efeitos sway resultamexclusivamente das forças horizontais.
39Mais concretamente, se admitirmos que a carga P é o valor efetivamente aplicado à consola, o qual pode ser multipli-cado pelo parâmetro de carga α, temos Pcr = αcr P = 3EI
L2 ⇒ αcr =3EIP L2 .
40Por uma questão de conveniência, estamos agora a admitir valores fixos de P e F e um parâmetro de carga α quedeverá ser aplicado a todo o carregamento.
41Pelo menos no comportamento inicial da pós-encurvadura. Como se viu na secção 5.6, para grandes deslocamentos odeslocamento vertical de uma coluna resulta predominantemente da flexão da coluna.
42Prefere-se utilizar as designações inglesas sway e non-sway, muito mais sugestivas que as equivalentes portuguesascom e sem deslocamentos laterais.
49

efeitos non-sway : os restantes, não envolvendo deslocamentos horizontais dos pisos. Se o pórticofor simétrico e as cargas verticais estiverem simetricamente distribuídas, os efeitos non-swayresultam exclusivamente das forças verticais.
No caso de não existirem condições de simetria que permitam fazer a decomposição imediata dasforças nas duas categorias, recorre-se a uma análise (de primeira ordem) na qual os deslocamentoshorizontais dos pisos estão impedidos, cujos resultados constituem os efeitos non-sway, ENS , devendoser registados os valores das reações horizontais. Para obter os efeitos sway, ES , basta aplicar, tambémnuma análise de primeira ordem, forças horizontais correspondentes às reações obtidas, aplicadasno sentido contrário. A figura 32 ilustra o conceito. Observe-se que, se o carregamento vertical fossesimétrico, a reação horizontal no apoio do piso seria R = F e a parcela sway resultaria das forçashorizontais aplicadas à estrutura sem qualquer modificação.43
F
p
F
p
R R
= +ESENS
Figura 32: Decomposição de um carregamento nas parcelas sway e non-sway.
Uma vez realizada esta decomposição, O método de amplificação dos efeitos sway consiste sim-plesmente em aplicar o fator β aos efeitos efeitos sway, mantendo inalterados os efeitos non-sway.Os efeitos de segunda ordem totais EI I são então dados por
EI I = ENS +1
1− 1αcr
ES
Saliente-se que toda esta metodologia para estimar os efeitos de segunda ordem é realizada combase unicamente em análises de primeira ordem. Mesmo o cálculo do parâmetro crítico αcr podeser obtido com recurso ao método de Horne, que, como vimos, também utiliza análises de primeiraordem.
O eurocódigo 3 (CEN, 2005) prevê que este método aproximado para contabilizar os efeitos desegunda ordem possa ser aplicado a pórticos regulares — nos quais a distribuição de cargas verticais,horizontais e de rigidez lateral é semelhante para todos os pisos — desde que αcr seja superior a 3.Como o regulamento dispensa a realização de uma análise de segunda ordem para αcr > 10 (análiseelástica), na prática o coeficiente de amplificação β poderá variar entre 1,11 e 1,5, como se ilustrana figura 33.
Exemplo E24: Análise de segunda ordem de um pórtico de um vão com todas as barras iguais.Este pórtico teve a sua carga crítica determinada no Exemplo E2, página 12, ou no Exemplo E22,página 47, e já foi alvo de uma análise de segunda ordem, no Exemplo E11, página 20. Introduzindoo valor de P = 6EI
L2 na estimativa da carga crítica, obtemos
αcr = 8,4EI
P L2= 8,4
L2
6EIEIL2=
8,46= 1,4 ⇒ β =
1
1− 11,4
= 3,5
43Note-se que a consideração do piso axialmente indeformável torna irrelevante em que ponto do piso são aplicadas asforças ou colocados os apoios. Consequentemente, está implícito que o esforço axial na viga não é importante.
50

3 10
1
1.5
0.5
1.11
β
αcr1
2a ordem amplificação 1a ordemimpo
ssív
el!
Figura 33: Fator de amplificação β e seu domínio de aplicação.
O valor deαcr é muito baixo, pelo que talvez não seja prudente a aplicação do método de amplificação(o eurocódigo não o permitiria), mas avaliemos quais as consequências de o fazermos.
Observemos em primeiro lugar que neste problema a parcela non-sway do carregamento são asduas forças P aplicadas simetricamente, as quais só introduzem esforços de compressão simples nasduas colunas.
O valor β = 3,5 foi exatamente a relação entre os deslocamentos horizontais (que são obviamentesway) de primeira e segunda ordem verificada no Exemplo E11 – ver nota de rodapé 8. Além disso,note-se que os diagramas de esforço transverso e de momento fletor de segunda-ordem, patentesna figura 13(b) são também exatamente 3,5 vezes os de primeira ordem, apresentados no topo damesma figura. A mesma relação não se verifica para os diagramas de esforço axial, já que estesincluem uma parcela non-sway.44
Esta equivalência perfeita resulta em parte de termos usado para carga crítica o valor obtidoconsiderando apenas um segmento por coluna e a versão simples da matriz de rigidez geométrica(ou o método de Horne sem fator correctivo) e, sobretudo, de estarmos a comparar com os resultadosda análise de segunda ordem mais grosseira. Se usarmos um valor mais preciso para a carga crítica,por exemplo o valor exato obtido no Exemplo E5,45 teremos outros resultados. A título de exemplo,calculemos os momentos fletores na base das colunas
αcr =7,379
6= 1,23 ⇒ β =
1
1− 67,379
= 5,35
⇒ MA = MD = βMA0 = 5,35× 0,286EIL= 1,53
EIL
Este valor deverá ser comparado com os obtidos na análise mais refinada apresentada na figura13(c): MA = 1,353 EI
L e MD = 1,175 EIL , registando-se erros que ultrapassam os 30%, mas é preciso
ter em conta que estamos a aplicar o método claramente fora do seu domínio recomendado. �
Exemplo E25: Carga crítica de um pórtico de dois pisos com vigas rígidas. Considere-se nova-mente este pórtico, cuja carga crítica foi determinada no Exemplo E4, página 13, e cuja análise desegunda ordem foi feita no Exemplo E13, página 25. Comparando as forças verticais aplicadas como parâmetro crítico, temos
αcr =64= 1,5 ⇒ β =
1
1− 11,5
= 3,0
44Mas se subtrairmos essa parcela verificamos que a proporção se mantém. Por exemplo, o esforço axial da colunadireita é 7,5≈ 3,5× (6,429− 6).
45Note-se, no entanto, que este valor foi obtido sem considerar a carga horizontal, cuja presença tem um pequeno efeitona carga crítica.
51

A análise de primeira ordem dos efeitos sway, correspondentes à aplicação das forças horizontais, é
EIL3
�
48 −24
−24 48
��
q1
q2
�
=EIL2
�
1
1
�
⇒
�
q1
q2
�
=
L12
L8
Multiplicando estes valores pelo factor de amplificação, obtemos
�
q1
q2
�
= 3
L12
L8
=
L4
3L8
=
�
0,2500 L
0,3750 L
�
valores que comparam com 0,2500 L e 0.3125 L, obtidos na análise de segunda ordem. Verificamosassim que o deslocamento do primeiro piso, associado ao primeiro modo, é corretamente determi-nado, o mesmo não acontecendo com o deslocamento do outro piso (mas ainda assim, razoavelmenteaproximado). �
Exemplo E26: Análise de segunda ordem de um pórtico de um vão com carga distribuída e umacoluna bi-articulada. Retomamos o Exemplo E15, página 25, com o intuito de mostrar como funci-ona a repartição do carregamento pelas parcelas sway e non-sway. Já sabemos que αcr =
167 ≈ 2,286,
pelo que
β =1
1− 716
=169≈ 1,778
Para determinar a parcela non-sway, trava-se o deslocamento horizontal do piso e calculam-se asreações e esforços — ver figura 34. Podemos aproveitar a equação do método dos deslocamentos,obtida na página 27, com as seguintes alterações:
(i) Como se trata de uma análise de primeira ordem, apenas se considera a matriz elástica;
(ii) Como o deslocamento horizontal está travado, tem-se q1 = 0;
(iii) Existe uma reação horizontal em C, onde colocamos o apoio, a qual deverá ser contabilizadanas forças nodais.
Escrevemos então,
EIL3
�
12 6L
6L 7L2
��
q1 = 0
q2
�
+
�
0
EI8L
�
=
� EI4L2 − R
0
�
Havendo só um deslocamento independente não nulo, q2, utiliza-se a segunda equação paraobter o seu valor,
7EIL
q2 +EI8L= 0 ⇒ q2 = −
156
Com base neste deslocamento (e em q1 = 0) é possível obter os esforços non-sway. Por exemplo, nabase da coluna temos
VA,NS =6EIL2
q2 = −3
28EIL2
MA,NS = −2EI
Lq2 =
128
EIL
De seguida, utiliza-se a primeira equação para obter o valor de R,
6EIL2
�
−156
�
=EI
4L2− R ⇒ R=
5EI14L2
52

L
P = EIL2
F = EI4L2
A
B
C
D
P p
R= 514
EIL2
MNS[EIL ]
128
− 228
998
A
B
C
D
MS[EIL ]
− 25112
15112
L
q1
F = EI4L2
A
B C
D
P = EIL2 p = EI
L3
q2
P
R
= +
Figura 34: Decomposição do carregamento do Exemplo E26 nas parcelas sway e non-sway.Diagramas de momentos de cada uma das parcelas.
A parcela sway do carregamento consiste unicamente nesta força. Para obtermos os deslocamen-tos e esforços correspondentes, usa-se novamente a equação de equilíbrio,
EIL3
�
12 6L
6L 7L2
��
q1
q2
�
=
�
R= 5EI14L2
0
�
⇒
�
q1
q2
�
=
5L96
− 5112
sendo os esforços sway na base dados por
VA,S = +12EI
L3q1 +
6EIL2
q2 =5
14EIL2
MA,S = −6EIL2
q1 −2EI
Lq2 = −
25112
EIL
Então, os esforços de segunda ordem na base são
VA = VA,NS + βVA,S =EIL2
�
−328+
169
514
�
=1936
EIL2≈ 0,528
EIL2
MA = MA,NS + βMA,S =EIL
�
128−
169
25112
�
=1336
EIL≈ −0,361
EIL
os quais coincidem com os valores obtidos na análise de segunda ordem realizada anteriormente(considerando apenas um segmento por coluna) – ver figura 18 na página 28. �
53

7 Comentários finais
Neste texto foram apresentados os conceitos fundamentais das análises geometricamente não linea-res de pórticos, tanto os inerentes às analises lineares de estabilidade para determinação de cargascríticas como os relativos à determinação de efeitos de segunda ordem. Procurou-se dar uma perspec-tiva unificada sobre diversas temas que, embora muito relacionados, nem sempre são apresentadosde forma coesa.
Dado o carácter introdutório deste texto, alguns aspetos muito importantes em análises de se-gunda ordem foram apenas aflorados ou estiveram mesmo ausentes. É o caso da implementação(i) do método de Newton para a solução de problemas não lineares de equilíbrio ou (ii) de técnicasde controle de incremento de deslocamentos (ou mesmo do método do comprimento de arco), quepermitam o traçado de trajetórias de equilíbrio para além da carga de colapso. Também se restringiuo âmbito às análises elásticas, omitindo-se qualquer referência à incorporação de modelos de rótulasplásticas que permitam a realização de análises plásticas de segunda ordem.
Embora com interesse evidente para o dimensionamento e verificação da segurança de estruturasmetálicas, o foco desta introdução centrou-se exclusivamente nas questões da análise, pelo que osexemplos de aplicação incidiram sobre estruturas com uma geometria muito idealizada. Apesar denão diretamente abordados, os conceitos dos efeitos P−∆ e P−δ estão implícitos nos exemplos emque se consideraram diversos segmentos para aproximar melhor o comportamento de cada coluna.
As técnicas aqui referidas são muito importantes para a correta aplicação do eurocódigo EC3(CEN, 2005). Esse regulamento estabelece quando devem ser tidos em conta os efeitos de segundaordem e, no caso afirmativo, qual o tipo de análises não lineares que devem ser utilizadas, prescre-vendo também quais as imperfeições que devem ser consideradas.
O EC3 estipula, ainda, como devem ser interpretados os resultados da análise, os quais (i) podemser fornecidos diretamente às verificações dos estados limites últimos de resistência, ou (ii) incor-porados nas fórmulas de interação para verificação dos estados limites últimos de encurvadura dasbarras.
Manuel Ritto Corrêa
27 Dezembro 2019
https://fenix.tecnico.ulisboa.pt/homepage/ist12396/textos-pedagogicos
54

Referências
CEN, 2005. EN 1993-1-1:2005, Eurocode 3: Design of steel structures : Part 1-1 : General rules andrules for buildings. CEN, Brussels.
Crisfield, M. A., 1991. Non-Linear Finite Element Analysis of Solids and Structures. Volume 1: Essenti-als. John Wiley & Sons Ltd, Chichester,.
Horne, M., 1975. An approximate method for calculating the elastic critical loads of multi-storeyplane frames. The Structural Engineer, 53(6):242–248.
Livesley, R. K. e Chandler, D. B., 1956. Stability functions for structural frameworks. ManchesterUniversity Press.
Reis, A. e Camotim, D., 2012. Estabilidade e Dimensionamento de Estruturas. Orion.
Ritto Corrêa, M., 2016. Introdução ao comportamento não linear de estruturas. Texto de apoiodisponibilizado no sistema fenix, IST. https://fenix.tecnico.ulisboa.pt/homepage/ist12396/textos-pedagogicos.
55