Embed Size (px)
Citation preview
Transformada Z
Vimos que as DTFTs de algumas sequências não convergem
uniformemente para funções contínuas de 𝜔, porque as sequências
não são absolutamente somáveis. A transformada Z permitirá a
análise de muitos destes sinais.
Além de simplificar a solução de equações a diferenças e a
computação de convoluções, a representação através da
transformada Z nos permitirá aprofundar o conhecimento de
propriedades de sinais e sistemas no domínio da frequência.
A transformada Z de uma sequência 𝑥 𝑛 é definida como:
𝑋 𝑧 = 𝑥 𝑛 𝑧−𝑛
∞
𝑛=−∞
onde 𝑧 = 𝑟𝑒𝑗𝜔 é uma variável complexa.
Transformada Z
O somatório acima converge se:
𝑥 𝑛 𝑟−𝑛
∞
𝑛=−∞
< ∞
ou seja, depende apenas dos valores de 𝑟 = 𝑧 .
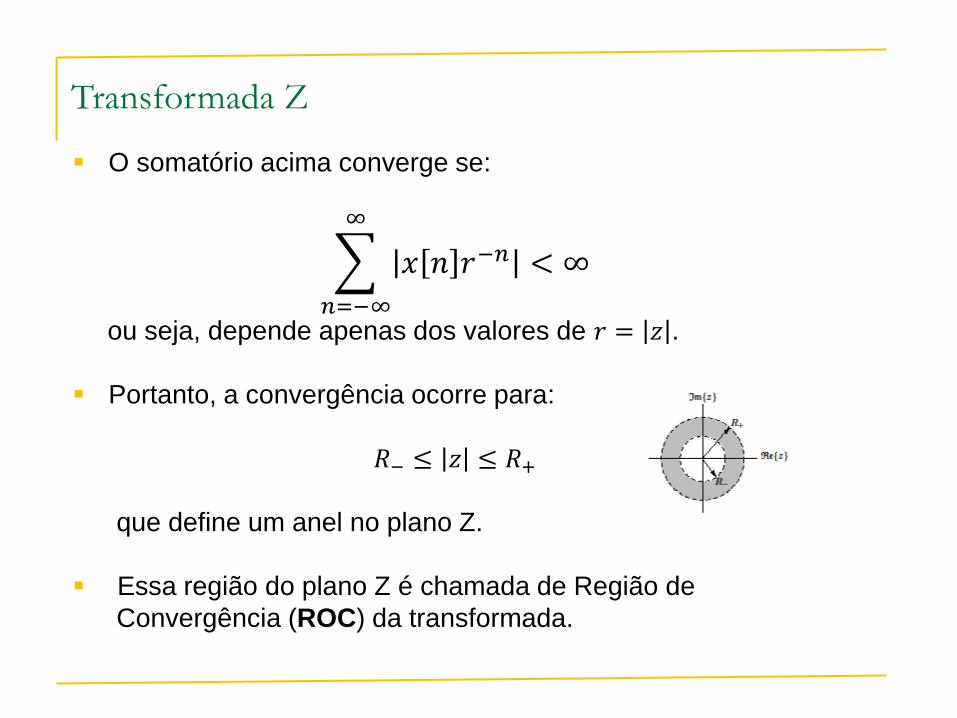
Portanto, a convergência ocorre para:
𝑅− ≤ 𝑧 ≤ 𝑅+
que define um anel no plano Z.
Essa região do plano Z é chamada de Região de
Convergência (ROC) da transformada.
Transformada Z
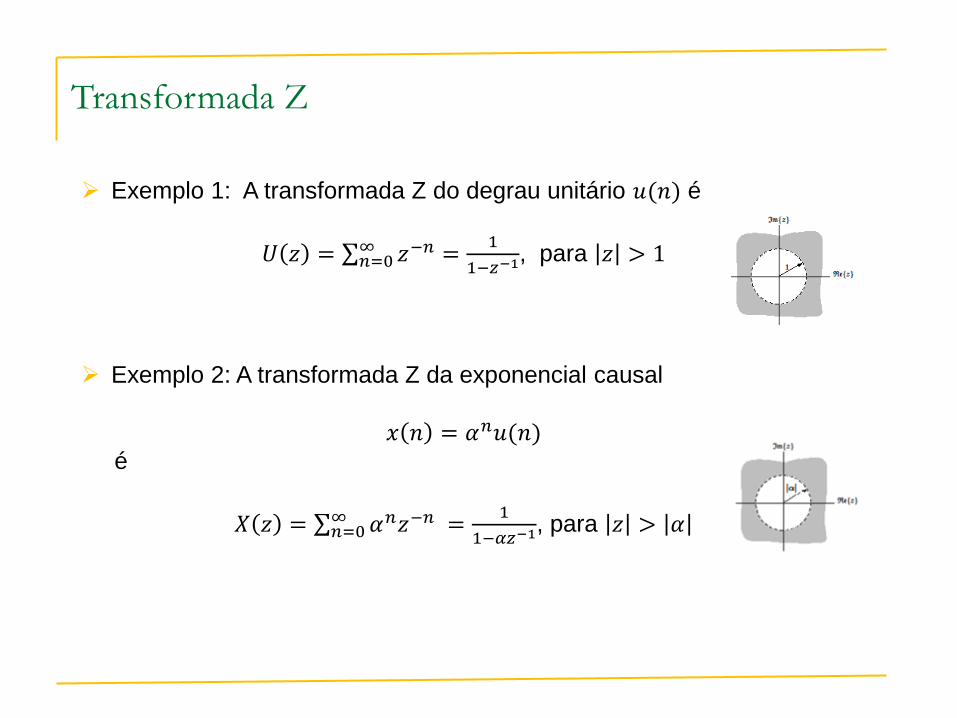
Exemplo 1: A transformada Z do degrau unitário 𝑢(𝑛) é
𝑈 𝑧 = 𝑧−𝑛 =1
1−𝑧−1∞𝑛=0 , para 𝑧 > 1
Exemplo 2: A transformada Z da exponencial causal
𝑥 𝑛 = 𝛼𝑛𝑢(𝑛) é
𝑋 𝑧 = 𝛼𝑛𝑧−𝑛 ∞𝑛=0 =
1
1−𝛼𝑧−1, para 𝑧 > 𝛼

Transformada Z
Exemplo 3: A transformada Z da exponencial anti-causal
𝑥 𝑛 = −𝛼𝑛𝑢(−𝑛 − 1) é
𝑋 𝑧 = −(𝛼𝑧−1)𝑛−1𝑛=−∞ =
1
1−𝛼𝑧−1 , para 𝑧 < 𝛼
Exemplo 4: A transformada Z da sequência
𝑥 𝑛 = 𝛼𝑛cos (𝜔0𝑛)𝑢(𝑛) é
𝑋 𝑧 = 𝛼𝑛 𝑒𝑗𝜔0𝑛+𝑒−𝑗𝜔0𝑛
2𝑧−𝑛 −1
𝑛=−∞ =1
1−𝛼𝑒𝑗𝜔0𝑧−1+1
1−𝛼𝑒−𝑗𝜔0𝑧−1
=1−𝛼cos (𝜔0)𝑧−1
1−2𝛼 cos 𝜔0 𝑧−1+𝛼2𝑧−2 , para 𝑧 > 𝛼
Região de Convergência (ROC)
As transformadas Z da maioria das sequências de interesse em
processamento de sinais são funções racionais de z, ou seja:
𝑋 𝑧 = 𝑞𝑘
𝑀𝑘=0 𝑧−𝑘
𝑝𝑘𝑁𝑘=0 𝑧−𝑘
=𝑞0
𝑝0𝑧𝑁−𝑀
(𝑧 − 𝜁𝑘)𝑀𝑘=1
(𝑧 − 𝜓𝑘𝑁𝑘=1 )
onde
𝜁𝑘 são os zeros de 𝑋 𝑧 , ou seja, os valores de 𝑧 tais que 𝑋 𝑧 = 0
𝜓𝑘 são os polos de 𝑋 𝑧 , ou seja, os valores de 𝑧 tais que 𝑋 𝑧 = ∞
Se 𝑁 > 𝑀, 𝑋 𝑧 tem 𝑁 − 𝑀 zeros em 𝑧 = 0
Se 𝑁 < 𝑀, 𝑋 𝑧 tem 𝑀 − 𝑁 polos em 𝑧 = 0
Região de Convergência (ROC)
A ROC de transformadas Z que são funções racionais de z são
delimitadas pela localização dos seus polos, conforme ilustrado nos
exemplos abaixo.
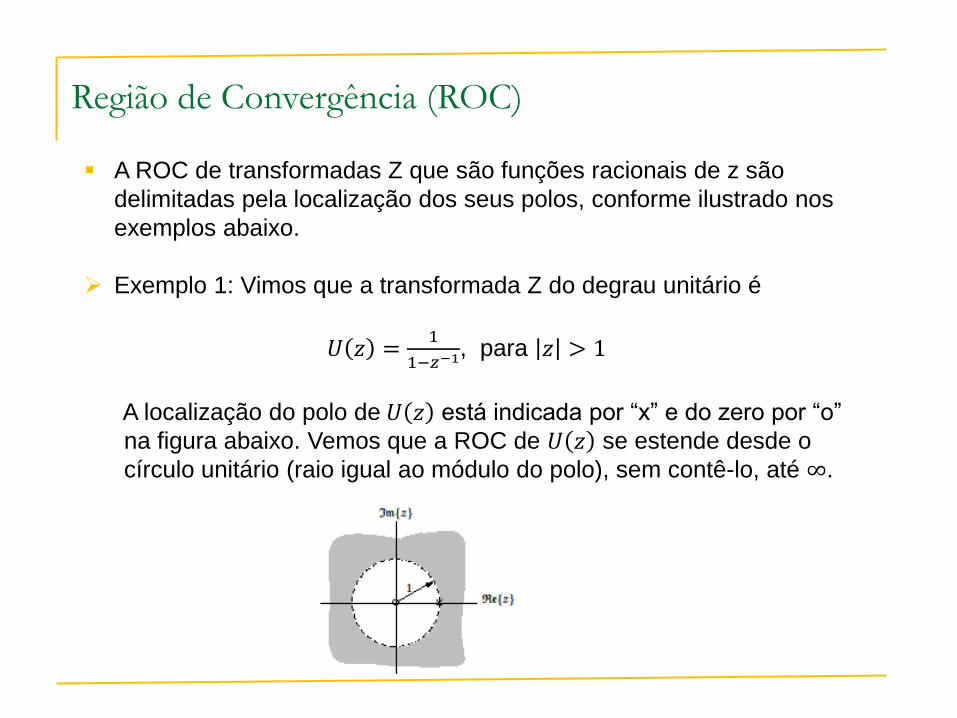
Exemplo 1: Vimos que a transformada Z do degrau unitário é
𝑈 𝑧 =1
1−𝑧−1, para 𝑧 > 1
A localização do polo de 𝑈 𝑧 está indicada por “x” e do zero por “o”
na figura abaixo. Vemos que a ROC de 𝑈 𝑧 se estende desde o
círculo unitário (raio igual ao módulo do polo), sem contê-lo, até ∞.
Região de Convergência (ROC)
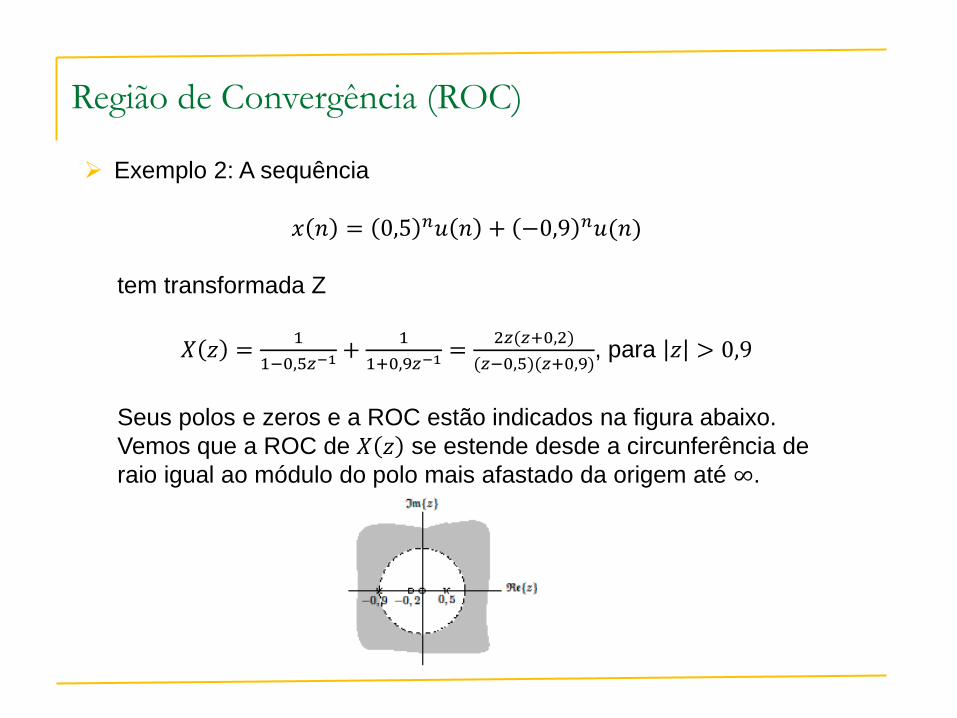
Exemplo 2: A sequência
𝑥 𝑛 = 0,5 𝑛𝑢 𝑛 + −0,9 𝑛𝑢(𝑛)
tem transformada Z
𝑋 𝑧 =1
1−0,5𝑧−1 +1
1+0,9𝑧−1 =2𝑧(𝑧+0,2)
(𝑧−0,5)(𝑧+0,9), para 𝑧 > 0,9
Seus polos e zeros e a ROC estão indicados na figura abaixo.
Vemos que a ROC de 𝑋 𝑧 se estende desde a circunferência de
raio igual ao módulo do polo mais afastado da origem até ∞.

Região de Convergência (ROC)
A seguir generalizaremos as observações dos exemplos para 4 tipos
de sequências: sequência de comprimento finito, sequência lateral
esquerda, sequência lateral direita e sequência bilateral.
Sequência de Comprimento Finito:
Seja 𝑥 𝑛 uma sequência de comprimento finito tal que 𝑥 𝑛 = 0 para 𝑛 < 𝑛1 e 𝑛 > 𝑛2. Então, sua transformada Z
𝑋 𝑧 = 𝑥(𝑛)𝑧−𝑛
𝑛2
𝑛=𝑛1
é um somatório finito, que convergirá para todo 𝑧, exceto para 𝑧 = 0 se 𝑛1 < 0 e/ou para 𝑧 = ∞ se 𝑛2 > 0.
Região de Convergência (ROC)
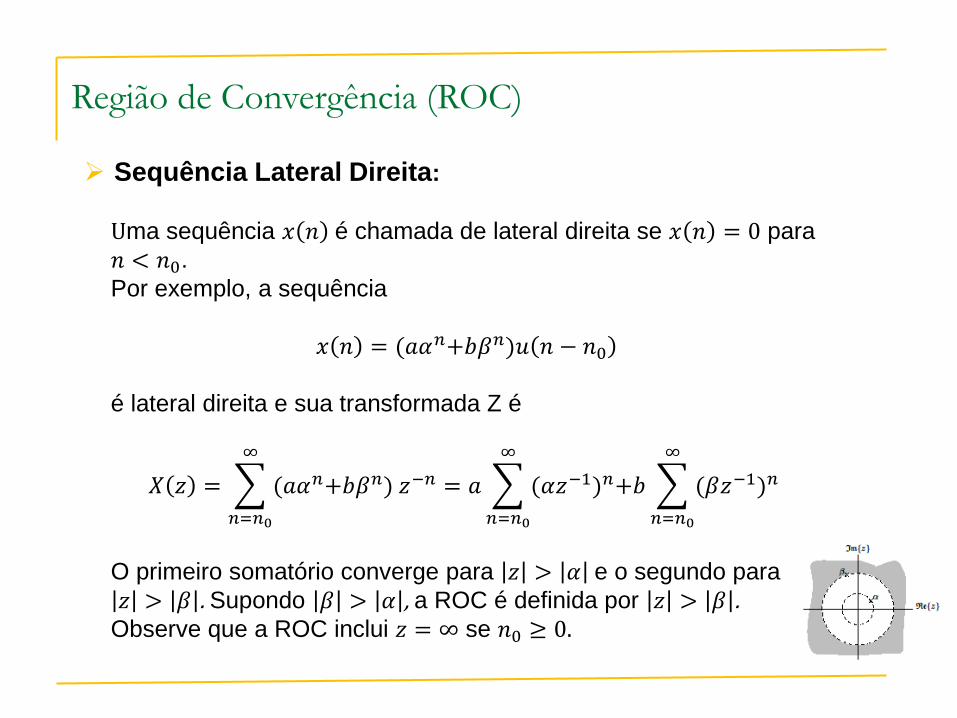
Sequência Lateral Direita:
Uma sequência 𝑥 𝑛 é chamada de lateral direita se 𝑥 𝑛 = 0 para 𝑛 < 𝑛0.
Por exemplo, a sequência
𝑥 𝑛 = (𝑎𝛼𝑛+𝑏𝛽𝑛)𝑢 𝑛 − 𝑛0
é lateral direita e sua transformada Z é
𝑋 𝑧 = (𝑎𝛼𝑛+𝑏𝛽𝑛) 𝑧−𝑛
∞
𝑛=𝑛0
= 𝑎 (𝛼𝑧−1)𝑛+𝑏 (𝛽𝑧−1)𝑛
∞
𝑛=𝑛0
∞
𝑛=𝑛0
O primeiro somatório converge para 𝑧 > 𝛼 e o segundo para
𝑧 > 𝛽 . Supondo 𝛽 > 𝛼 , a ROC é definida por 𝑧 > 𝛽 . Observe que a ROC inclui 𝑧 = ∞ se 𝑛0 ≥ 0.
Região de Convergência (ROC)
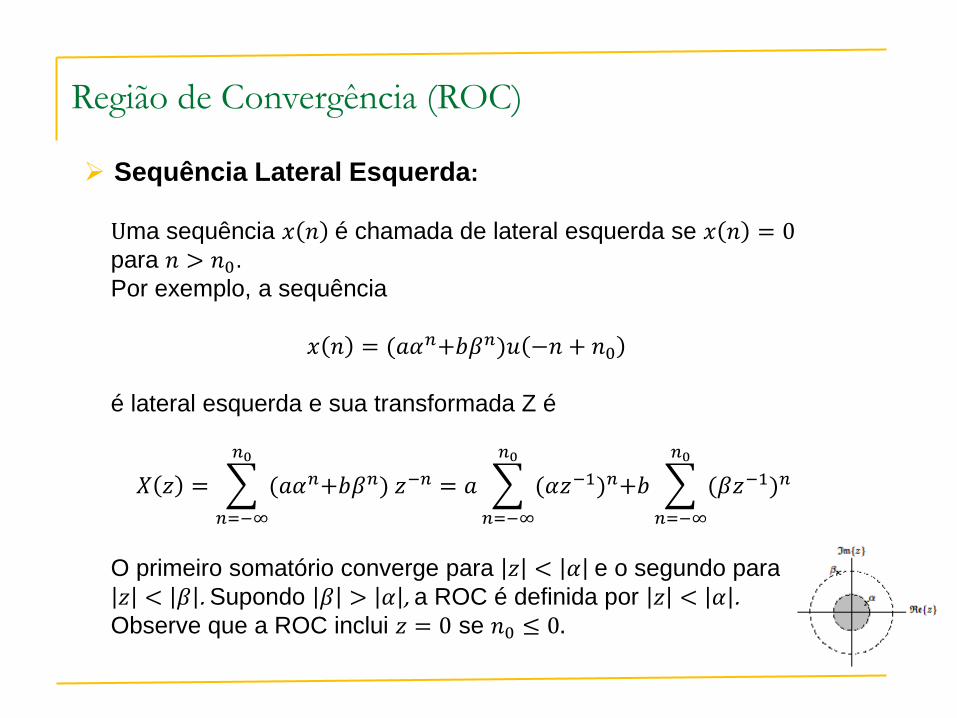
Sequência Lateral Esquerda:
Uma sequência 𝑥 𝑛 é chamada de lateral esquerda se 𝑥 𝑛 = 0
para 𝑛 > 𝑛0.
Por exemplo, a sequência
𝑥 𝑛 = (𝑎𝛼𝑛+𝑏𝛽𝑛)𝑢 −𝑛 + 𝑛0
é lateral esquerda e sua transformada Z é
𝑋 𝑧 = (𝑎𝛼𝑛+𝑏𝛽𝑛) 𝑧−𝑛
𝑛0
𝑛=−∞
= 𝑎 (𝛼𝑧−1)𝑛+𝑏 (𝛽𝑧−1)𝑛
𝑛0
𝑛=−∞
𝑛0
𝑛=−∞
O primeiro somatório converge para 𝑧 < 𝛼 e o segundo para
𝑧 < 𝛽 . Supondo 𝛽 > 𝛼 , a ROC é definida por 𝑧 < 𝛼 . Observe que a ROC inclui 𝑧 = 0 se 𝑛0 ≤ 0.
Região de Convergência (ROC)
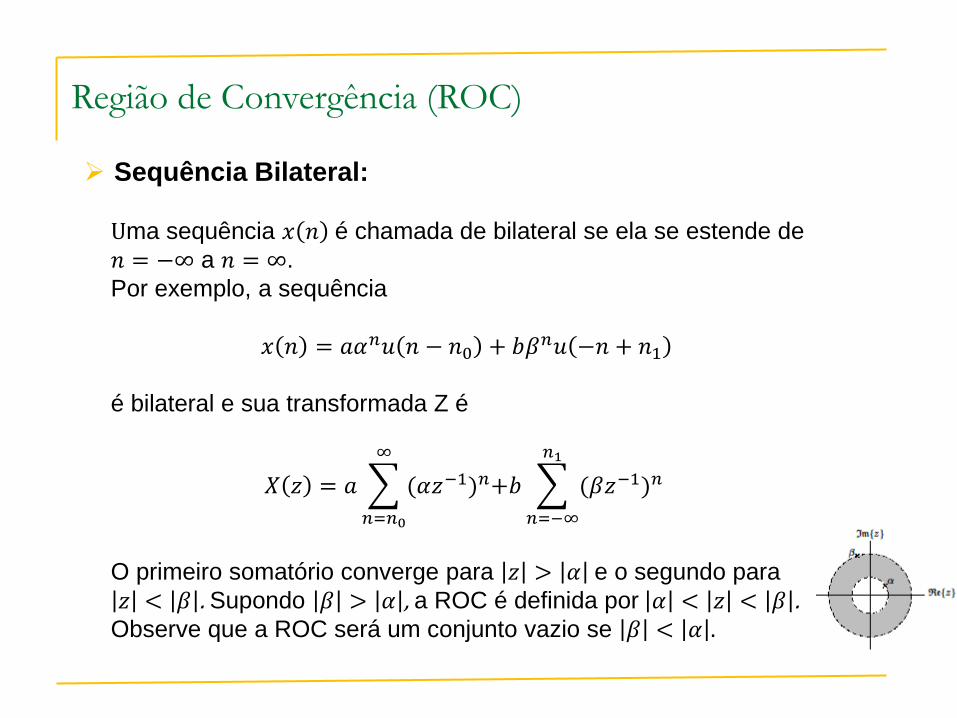
Sequência Bilateral:
Uma sequência 𝑥 𝑛 é chamada de bilateral se ela se estende de 𝑛 = −∞ a 𝑛 = ∞.
Por exemplo, a sequência
𝑥 𝑛 = 𝑎𝛼𝑛𝑢 𝑛 − 𝑛0 + 𝑏𝛽𝑛𝑢 −𝑛 + 𝑛1
é bilateral e sua transformada Z é
𝑋 𝑧 = 𝑎 (𝛼𝑧−1)𝑛+𝑏 (𝛽𝑧−1)𝑛
𝑛1
𝑛=−∞
∞
𝑛=𝑛0
O primeiro somatório converge para 𝑧 > 𝛼 e o segundo para
𝑧 < 𝛽 . Supondo 𝛽 > 𝛼 , a ROC é definida por 𝛼 < 𝑧 < 𝛽 . Observe que a ROC será um conjunto vazio se 𝛽 < 𝛼 .
Região de Convergência (ROC)
Concluindo:
A ROC de uma sequência de comprimento finito é todo o plano 𝑧,
exceto possivelmente 𝑧 = 0 e/ou 𝑧 = ∞.
A ROC de uma sequência lateral direita 𝑥 𝑛 é a região externa ao
círculo de raio igual ao módulo do polo de 𝑋 𝑧 mais afastado da
origem, exceto possivelmente 𝑧 = ∞.
A ROC de uma sequência lateral esquerda 𝑥 𝑛 é a região interna
ao círculo de raio igual ao módulo do polo de 𝑋 𝑧 mais próximo da
origem, exceto possivelmente 𝑧 = 0.
A ROC de uma sequência bilateral 𝑥 𝑛 é um anel no plano z,
delimitado por círculos de raios iguais a módulos de polos de 𝑋 𝑧 ,
ou será uma região vazia.
A ROC não pode conter polos.
Transformada Z Inversa
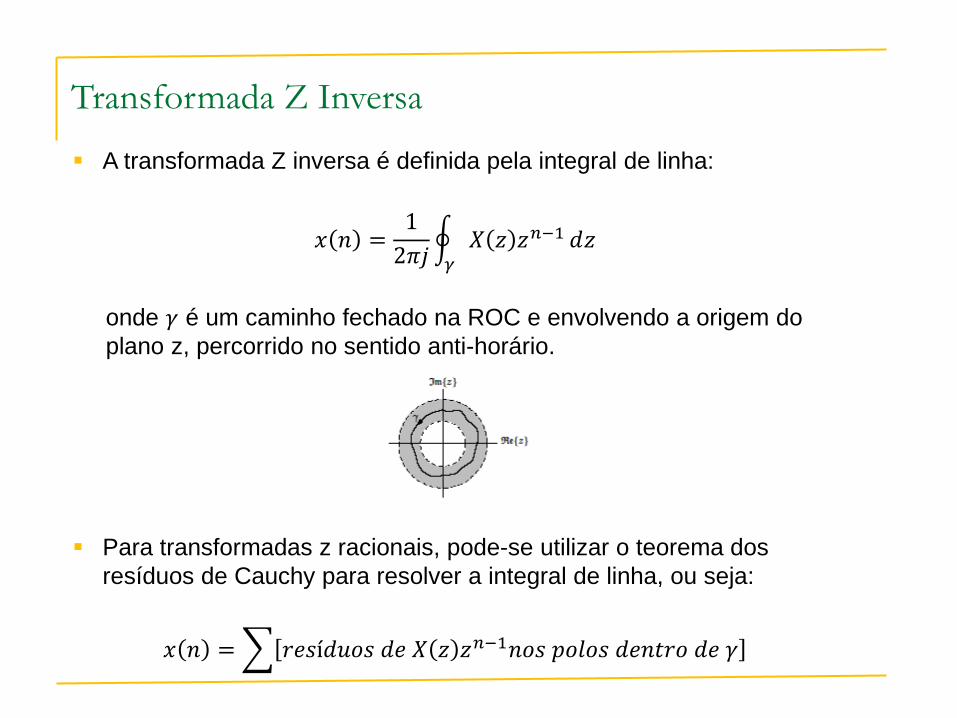
A transformada Z inversa é definida pela integral de linha:
𝑥 𝑛 =1
2𝜋𝑗 𝑋 𝑧 𝑧𝑛−1 ⅆ𝑧𝛾
onde 𝛾 é um caminho fechado na ROC e envolvendo a origem do
plano z, percorrido no sentido anti-horário.
Para transformadas z racionais, pode-se utilizar o teorema dos
resíduos de Cauchy para resolver a integral de linha, ou seja:
𝑥 𝑛 = 𝑟𝑒𝑠íⅆ𝑢𝑜𝑠 ⅆ𝑒 𝑋 𝑧 𝑧𝑛−1𝑛𝑜𝑠 𝑝𝑜𝑙𝑜𝑠 ⅆ𝑒𝑛𝑡𝑟𝑜 ⅆ𝑒 𝛾
Transformada Z Inversa
Exemplo: Seja
𝑋 𝑧 =1
1−𝛼𝑧−1, ROC: 𝑧 > 𝛼
A transformada inversa é:
𝑥 𝑛 =1
2𝜋𝑗
𝑧
𝑧 − 𝛼𝑧𝑛−1 ⅆ𝑧 =
1
2𝜋𝑗
𝑧𝑛
𝑧 − 𝛼ⅆ𝑧
𝛾𝛾
Para 𝑛 ≥ 0, a função 𝑧𝑛
𝑧−𝛼 possui um polo simples em 𝑧 = 𝛼, e o
resíduo neste polo é:
(𝑧 − 𝛼)𝑧𝑛
𝑧 − 𝛼 𝑧=𝛼
= 𝛼𝑛
Para 𝑛 < 0, além do pole em 𝑧 = 𝛼, há polos de multiplicidade 𝑛
em 𝑧 = 0.

Transformada Z Inversa
A transformada Z inversa pode ser obtida mais facilmente através da
expansão em frações parciais, usando a propriedade de
linearidade.
Exemplo 1: Seja
𝑋 𝑧 =1 + 2𝑧−1 + 𝑧−2
1 − 1,5𝑧−1 + 0,5𝑧−2
ROC: 𝑧 > 1
Esta função pode ser reescrita como:
𝑋 𝑧 =1 + 2𝑧−1 + 𝑧−2
(1 − 0,5𝑧−1)(1 − 𝑧−1)
= 2 −9
1 − 0,5𝑧−1 +8
1 − 𝑧−1
Transformada Z Inversa
Identificando a transformada inversa de cada termo, temos:
𝑥 𝑛 = 2𝛿 𝑛 − 9 0,5 𝑛u n + 8u(n)
Exemplo 2: Seja
𝑋 𝑧 =1 + 2𝑧−1 + 𝑧−2
1 − 1,5𝑧−1 + 0,5𝑧−2
ROC: 𝑧 <0,5
Como no exemplo anterior, a função pode ser reescrita como:
𝑋 𝑧 = 2 −9
1 − 0,5𝑧−1 +8
1 − 𝑧−1
Identificando a transformada inversa de cada termo, temos:
𝑥 𝑛 = 2𝛿 𝑛 + 9 0,5 𝑛u −n − 1 − 8u(−n − 1)

Transformada Z Inversa
Exemplo 3: Seja
𝑋 𝑧 =1 + 2𝑧−1 + 𝑧−2
1 − 1,5𝑧−1 + 0,5𝑧−2
ROC: 0,5< 𝑧 <1
Como nos exemplos anteriores, a função pode ser reescrita como:
𝑋 𝑧 = 2 −9
1 − 0,5𝑧−1 +8
1 − 𝑧−1
Identificando a transformada inversa de cada termo, temos:
𝑥 𝑛 = 2𝛿 𝑛 − 9 0,5 𝑛u n − 8u(−n − 1)

Transformada Z Inversa
A inversa de transformadas Z racionais também pode ser obtida por
divisão longa, ou seja, dividindo o polinômio do numerador pelo o
do denominador.
Exemplo 1: Seja
𝑋 𝑧 =1
1 − 𝛼𝑧−1
ROC: 𝑧 > 𝛼
A divisão de 1 por (1 − 𝛼𝑧−1) é 1 + 𝛼𝑧−1 + 𝛼2𝑧−2 + ⋯, de onde
identificamos 𝑥 0 = 1, 𝑥 1 = 𝛼, 𝑥 2 = 𝛼2, ⋯. Portanto, a forma
geral da inversa é:
𝑥 𝑛 = 𝛼𝑛𝑢(𝑛)
Transformada Z Inversa
Exemplo 2: Seja
𝑋 𝑧 =1
1 − 𝛼𝑧−1
ROC: 𝑧 < 𝛼
Pela região de convergência (externa ao círculo de raio 𝛼 ),
sabemos que a inversa é uma sequência lateral esquerda.
Portanto, devemos fazer a divisão de polinômios de modo a obter
potências positivas de z.
Neste exemplo, dividimos 1 por (−𝛼𝑧−1 + 1), obtendo −𝛼−1𝑧 − 𝛼−2𝑧2 − 𝛼−3𝑧3 − ⋯, de onde identificamos 𝑥 −1 = −𝛼−1, 𝑥 −2 = −𝛼−2, 𝑥 −3 = −𝛼−3, ⋯.
Portanto, a forma geral da inversa é:
𝑥 𝑛 = −𝛼𝑛𝑢(−𝑛 − 1)
Relação entre a Transformada Z e a DTFT
Escrevendo 𝑧 na forma polar, 𝑧 = 𝑟𝑒𝑗𝜔, temos:
𝑋 𝑟𝑒𝑗𝜔 = 𝑥(𝑛)𝑟−𝑛𝑒−𝑗𝜔𝑛
∞
𝑛=−∞
que é igual à DTFT de 𝑥(𝑛)𝑟−𝑛 .
Para 𝑟 = 1 (i.e, 𝑧 = 1), a transformada Z se reduz à DTFT de 𝑥(𝑛) desde que a ROC de X(𝑧) inclua o círculo unitário.
Em particular, para z = 1, X 1 = X 𝑒𝑗0 , ou seja, é o valor da DTFT
em 𝜔 = 0 (DC).
Em z = 𝑗, X 𝑗 = X 𝑒𝑗𝜋/2 , ou seja, é o valor da DTFT em 𝜔 = 𝜋/2
(Ω = Ω𝑇/4).
Em z = −1, X −1 = X 𝑒𝑗𝜋 , ou seja, é o valor da DTFT em 𝜔 = 𝜋
(Ω = Ω𝑇/2).

Propriedades da Transformada Z
Sejam duas sequências g n ⟷ 𝐺 𝑧 , ROC: ℜ𝑔, e h(n) ⟷ 𝐻 𝑧 ,
ROC: ℜℎ. Então, as seguintes propriedades são válidas:
(i) Linearidade:
αg n + 𝛽ℎ 𝑛 ⟷ 𝛼𝐺 𝑧 + 𝛽𝐻 𝑧
ROC: inclui ℜ𝑔 ∩ ℜℎ
(ii) Deslocamento no tempo:
g 𝑛 − 𝑛0 ⟷ 𝑧−𝑛0𝐺 𝑧
ROC: ℜ𝑔 exceto possivelmente 𝑧 = 0 ou 𝑧 = ∞
(iii) Reversão no tempo:
g −𝑛 ⟷ 𝐺 1/𝑧
ROC: 1/ℜ𝑔
Propriedades da Transformada Z
(vi) Multiplicação por sequência exponencial:
𝛼𝑛g 𝑛 ⟷ 𝐺 𝑧/𝛼
ROC: 𝛼 ℜ𝑔
(v) Diferenciação de 𝐺(𝑧):
𝑛g 𝑛 ⟷ −𝑧ⅆ𝐺 𝑧
ⅆ𝑧
ROC: ℜ𝑔 exceto possivelmente 𝑧 = 0 ou 𝑧 = ∞
(vi) Convolução:
𝑔 𝑛 ∗ ℎ 𝑛 ⟷ 𝐺 𝑧 𝐻(𝑧)
ROC: inclui ℜ𝑔 ∩ ℜℎ

Propriedades da Transformada Z
(vii) Modulação:
𝑔 𝑛 ℎ(𝑛) ⟷1
2𝜋𝑗 𝐺 𝜐 𝐻 𝑧 𝜐 𝜐−1
𝛾
ⅆ𝜐
ROC: inclui ℜ𝑔ℜℎ
Teorema de Parseval:
𝑔 𝑛 ℎ∗ 𝑛 =
∞
𝑛=−∞
1
2𝜋𝑗 𝐺 𝜐 𝐻∗ 1 𝜐∗ 𝜐−1
𝛾
ⅆ𝜐





























