Embed Size (px)
DESCRIPTION
A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise M. Ester, H-P. Kriegel, J. Sander, X. Xu. Apresentação: Léia Michelle de Souza. Algoritmos Baseados em Densidade. - PowerPoint PPT Presentation
Citation preview

A Density-Based Algorithm for Discovering Clusters in Large Spatial
Databases with Noise
M. Ester, H-P. Kriegel, J. Sander, X. Xu
Apresentação: Léia Michelle de Souza

Algoritmos Baseados em Densidade
Esses algoritmos assumem que os clusters são regiões de alta densidade de padrões separadas por regiões com baixa densidade, no espaço de padrões.
Um cluster é definido como um componente denso conectado em qualquer direção dada pela densidade.

Densidade – Características Principais
Descoberta de grupos de forma arbitrária; Tratamento de Ruído; Apenas uma escaneada; É necessário parâmetros de densidade como
condições. Separar regiões de objetos de alta e baixa
densidade.

DBScan – Density Based Spatial Clustering of Applications with Noise
É um algoritmo baseado em densidade para agrupar os objetos ou pontos.

1. Parâmetros
Para se iniciar um algoritmo DBScan é necessário definir dois parâmetros principais:
Raio - Distância entre um objeto (Ponto) e seus vizinhos.
MinPts - Objetos(Pontos) Central.

2. Parâmetros
Eps Valor que descreve a Medida de Proximidade, isto é,
quantos pontos vizinhos próximos, um par de pontos necessita ter em comum para serem considerados próximos.
Raio máximo da vizinhança MinPts Valor relativo a densidade mínima, ou seja, número de
vizinhos próximos que um ponto precisa ter para ser considerado “Core Point”.
Número de pontos mínimo em Eps desse ponto.

3. Parâmetros
Neps(p) : {q D | dist(p,q) < = Eps} Um ponto p é alcançável pela densidade de
um ponto q Eps, MinPts se: 1) p Neps(q) 2)Condição de Ponto Núcleo: |Neps(q)| >= MinPts

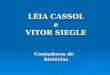
Exemplo 1
pq
p : border point
q : core point
MinPts = 5
Eps = 1cm

1. Densidades
Alcançável pela Densidade Um ponto p é alcançável pela densidade de um ponto q
Eps, MinPts se existe uma cadeia de pontos p1,...,pn,p1 = q,pn = p tal que pi+1 é diretamente alcançável pela Densidade de pi.
p1
p
q

2. Densidades
Conectado pela Densidade Um ponto p é conectado pela densidade a
um ponto q Eps, MinPts se existir um ponto O para ambos, p e q são alcançáveis pela densidade de O.
q
O
p

1. Regras para gerar Clusters
Um ponto pertence a um cluster K somente se estiver localizado no raio de um ponto central do cluster;
Um ponto central p, no raio de um outro ponto central pi qualquer, precisa pertencer ao mesmo cluster K;
Um ponto não central p, no raio de um ponto central p1...pi, onde i>0 precisa pertencer ao mesmo cluster cujo objeto central esteja entre p1...pi;
Um ponto não central p que não estiver no raio de nenhum objeto central é considerado ruído.

2. Regras para gerar Clusters
Para a geração de Clusters é necessário que se teste o raio de cada ponto da base de dados. Se o raio de um objeto (ponto) p contém mais de um ponto central (MinPts), então criaremos um novo Clusters para o objeto p.
Os objetos (pontos) no raio p são então adicionados ao novo Cluster.
Pode-se ocorrer que um objeto central que já pertença a um Cluster, seja encontrado dentro de outro Cluster.

3. Regras para gerar Clusters
Os dois Clusters serão agrupados em um só e o processo se encerra quando não existir novos pontos a serem adicionados a qualquer Cluster.
C1
C2

Algoritmo do DBScan
Recupere todos os pontos alcançáveis pela densidade de p,Eps,MinPts
P
Se p é um ponto core, forma-se um grupo
Se p é um ponto fronteira, não há pontos alcançáveis pela densidade de p, visitar o próximo ponto
Continue o processo até que todos os pontos tenham sido processados
Escolha um Ponto arbitrariamente

Distância entre dois pontos Dist(S1,S2) = min{dist(p,q) | p S1,q S2} DBScan (SetOfPoints, Eps,MinPts) //SetOfPoints is UNCLASSIFIED ClusterId : = nextId(NOISE); FOR i FROM 1 TO SetOfPoints.size DO
Point :=SetOfPoints.get(i); IF Point.ClId = UNCLASSIFIED THEN
IF ExpandCluster(SetOfPoints,Point,ClusterId,Eps,MinPts) THEN
ClusterId := nextId(ClusterId)END IF
END IF END FOR END;//DBScan

Clusters ExpandCluster(SetOfPoints,Point,ClId,Eps,Minpts):Boolean; seeds:=SetOfPoints,regionQuery(Point,Eps); IF seeds.size<MinPts THEN
SetOfPint.changeClId(Point,NOISE); RETURN false; ELSE SetOfPoints.changeClIds(seeds,ClId); Seeds.delete(Point);
While seeds <> Empty DO CurrentP:=seeds.firts(); Result:= SetOfPoints.regionQuery(currentP,Eps); IF result.size > = MinPts THEN
FOR i FROM 1 TO result.size DO resultP:=result.get(i); IF resultP.ClId IN {UNCLASSIFIED,NOISE} THEN IF resultP.ClId = UNCLASSIFIED THEN seeds.append(resultP); END IF SetOfPoints.changeClId(result,ClId); END IF END FOREND IFSeeds.delete(currentP);
END WHILE RETURN True;
END IF END;

Parâmetros
Valor de Eps Valor de MinPt Resultado
Alto Alto Poucos clusters grandes e densos
Baixo Baixo Muitos clusters pequenos e menos densos
Alto Baixo Clusters grandes e menos densos
Baixo Alto Clusters pequenos e densos

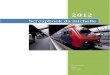
Avaliação de desempenho
Agrupamentos descobertos por CLARANS

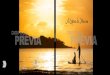
Avaliação de desempenho
Agrupamentos descobertos por DBSCAN

Run Time em segundos

Algoritmo DBScan
Vantagem Eficiente em tratar grandes bases de dados Menos sensível a ruídos Forma clusters de formato arbitrário Usuário não precisa especificar a quantidade de clusters
Desvantagem Sensível aos parâmetros de entrada(Eps e MinPt)

Problemas do DBScan
Agrupamentos diferentes podem ter mesmo
densidades diferentes. Agrupamentos podem estar em hierarquias.

Referências Bibliográficas