Embed Size (px)
Citation preview

Profº Engº Hermom Leal, Msc.
Versão 2 – Outubro/2019
Projeto de Sensoreamento e Instrumentação por controle PID –
Parte II
Automação Industrial

Controladores
PID – Proporcional-Integral-
Derivativo -
(Ajuste de Parâmetros)
HERMOM LEAL MOREIRA

⚫Sumário
1. Introdução;
2. Testando o Controlador - Teste – kp, ki e kd=0;
3. Teste P – tref=30, kp=50, ki e kd=0;
4. Teste P – tref=30, kp=5000, ki e kd=0;
5. Teste PID – tref=30, kp=50, ki=20 e kd=10;
Referência: Movimento, luz e som com Arduino e Raspebery Pi – Simon Monk.
Editora NOVATEC – Série Make.

⚫ Este experimento tem como base a utilização de um código principal denominado /pid_thermostat.ino.
⚫ O microcontrolador utilizado é o Arduino, sendo que, o código principal realiza a leitura de temperatura do sensor DS18B20, através de uma biblioteca do dispositivo denominado (DallasTemperature.h), que tem a função de realizar a leitura de temperatura externa.
⚫ Além disto, o Arduino trabalha com bibliotecas, e para este experimento foram instaladas as bibliotecas denominadas OneWire.h, Arduino-Temperature-Control-Library.h e PIDLibrary.h
⚫ Introdução

⚫ Introdução
Figura 1. Bibliotecas
Utilizadas
O objetivo do experimento é realizar o teste do controlador PID,
para a alteração da temperatura de referência e dos valores de kp, ki
e kd.
Logo após será feito o registro dos dados obtidos na saída a fim de obter
bom controle na saída.

2. Testando o Controlador;
Ao ajustar o efeito de ganho kp (ganho) sobre a saída em
um controlador proporcional, são obtidos o sinais conforme
a Figura 2.

2. Testando o Controlador;
Quando os valores de kp, ki e kd são
iguais a (0) o controlador não atua. Com
isto, somente o sinal de temperatura
recebido do sensor DS18B20, através da
entrada (Pin2) do hardware será
computada e consequentemente a saída
(Pin9) não envia o sinal tipo PWM para a
carga, ou seja, não ocorre a chamada
retroalimentação conforme a Figura 3.

2. Testando o Controlador;
Figura 3 – Dados de entrada (Input)
- Ajuste Default

2. Testando o Controlador;
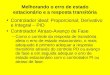
24,3
24,4
24,5
24,6
24,7
24,8
24,9
25
25,1
25,2
25,3
25,4
1
10
19
28
37
46
55
64
73
82
91
100
109
118
127
136
145
154
163
172
181
190
199
208
217
226
235
244
253
262
271
280
289
298
307
316
325
334
343
352
361
370
379
388
397
406
415
424
433
442
451
460
Te
mp
era
tura
Rea
l
Tempo-750ms
Controlador sem ajuste
25,25
Figura 4 – Dados de saída (Output)
- Ajuste Default

3. Teste P – tref=30, kp=50;
Nesta etapa são feitos ajuste no
valor de temperatura de referência
(tref=30), no valor de kp (k=50). Com
isto, é possível observar que a
segunda coluna terá um valor fixo de
30 graus e terceira coluna terá um
valor variando entre 0 e 255 referente
ao sinal PWM, que buscará ajustar o
valor da temperatura.

3. Teste P – tref=30, kp=50;
Figura 5 – Dados de entrada (Input)
- Ajuste tref=30, kp=50

3. Teste P – tref=30, kp=50;
Figura 6 – Dados de saída (Output)
- Ajuste tref=30, kp=50, ki e kd=0
22
23
24
25
26
27
28
29
1
15
29
43
57
71
85
99
113
127
141
155
169
183
197
211
225
239
253
267
281
295
309
323
337
351
365
379
393
407
421
435
449
463
477
491
505
519
533
547
561
575
589
603
617
631
645
659
673
Te
mp
era
tura
Rea
l
Tempo/750ms
Controlador Tipo P
24,19

3. Teste P – tref=30, kp=50;
Análise:

4. Teste P – tref=30, kp=5000;
Figura 7 – Dados de entrada (Input)
- Ajuste tref=30, kp=5000, ki e kd=0

4. Teste P – tref=30,kp=5000;
Figura 8 – Dados de saída (Output)
- Ajuste tref=30, kp=5000, ki e kd=0
0
5
10
15
20
25
30
35
1
11
21
31
41
51
61
71
81
91
101
111
121
131
141
151
161
171
181
191
201
211
221
231
241
251
261
271
281
291
301
311
321
331
341
351
361
371
381
391
401
411
421
431
441
451
461
471
481
491
Te
mp
era
tura
Rea
l
Tempo/750ms
Controlador Tipo P
Coluna A

4. Teste P – tref=30,kp=5000;
Análise:

5. Teste PID – tref=30,kp=50, ki=20, kd=10
Figura 9 – Dados de entrada (Input)
- Ajuste tref=30, kp=50, ki=20 e kd=10.

5. Teste PID – tref=30,kp=50, ki=20, kd=10
Figura 10 – Dados de saída (Output)
- Ajuste tref=30, kp=50, ki=20 e kd=10.
0
5
10
15
20
25
30
35
127
53
79
105
131
157
183
209
235
261
287
313
339
365
391
417
443
469
495
521
547
573
599
625
651
677
703
729
755
781
807
833
859
885
911
937
963
989
1015
1041
1067
1093
1119
1145
1171
1197
1223
1249
1275
1301
1327
Te
mp
era
tura
Rea
l
Tempo/750ms
Controle PID
Coluna A

5. Teste PID – tref=30,kp=50, ki=20, kd=10
Análise: