-
8/11/2019 Artigo erro varincia identificao.pdf
1/14
Automatica 45 (2009) 25122525
Contents lists available atScienceDirect
Automatica
journal homepage:www.elsevier.com/locate/automatica
Variance-error quantification for identified poles and zeros
Jonas Mrtensson ,Hkan HjalmarssonACCESS Linnaeus Center, School
of Electrical Engineering, KTH Royal Institute of Technology, S-100
44 Stockholm, Sweden
a r t i c l e i n f o
Article history:
Received 11 July 2007
Received in revised form
7 December 2008
Accepted 9 July 2009Available online 10 September 2009
Keywords:
Accuracy of identification
Asymptotic variance expressions
a b s t r a c t
This paper deals with quantification of noise induced errors in
identified discrete-time models of causal
linear time-invariant systems, where the model error is
described by the asymptotic (in data length)variance of the
estimated poles and zeros. The main conclusion is that there is a
fundamental difference
in the accuracy of the estimates depending on whether the zeros
and poles lie inside or outside the unitcircle. As the model order
goes to infinity, the asymptotic variance approaches a finite limit
for estimates
of zeros and poles having magnitude larger than one, but for
zeros and poles strictly inside the unit circletheasymptotic
variance grows exponentially with themodelorder.We analyze howthe
variance of polesand zeros is affected by model order, model
structure and input excitation. We treat general black-box
model structures including ARMAX and BoxJenkins models.
2009 Elsevier Ltd. All rights reserved.
1. Introduction
Model accuracy is an important issue in system
identificationapplications. The experimental conditions, such as
excitation
signals, feedback mechanisms, disturbances and measurement
noise,naturally affect theaccuracyof the model,but also the
choiceof model structure and model order can have a strong
influence.The model error can generally be divided into two parts:
bias-errorand variance-error, where the bias-error is dueto
un-modeled
dynamics and the variance-error is caused by disturbances
whichare modeled as stochastic processes (Ljung,1999;Sderstrm
&Stoica, 1989). The focus in this paper is on the
variance-error,which will be thedominating part if the model
structure is flexibleenough to describe the true underlying
dynamics. We will thus
assume that the true system belongs to the model set.The problem
of quantifying the expected model error has
received substantial research interest over the past decades.
Inparticular, the variance of frequency function estimates has
beenstudied extensively. In the mid-eighties Ljung(1985)
presented
a variance expression which showed that, for high model
orders,the asymptotic variance1 of the frequency function estimate
does
The material in this paper was partially presented at the 44th
IEEE Conference
on Decision and Control and European Control Conference ECC
2005, 12th15th
December2005 in Seville, Spain, andat the 16thIFAC WorldCongress
on Automatic
Control,3rd8thJuly 2005 in Prague,Czech Republic. Thispaperwas
recommended
forpublicationin revisedform by AssociateEditorBrett
Ninnessunder thedirection
of Editor Torsten Sderstrm. Corresponding author. Tel.: +46 8
7907434; fax: +46 8 7907329.E-mail addresses:
[email protected](J. Mrtensson),
[email protected](H. Hjalmarsson).1 Henceforth,
asymptotic variancedenotesthe varianceof an estimatedquantity,
normalized by the sample size, as the sample size tends to
infinity.
not depend on the model structure but only on the model
order.Furthermore, it was shown that the asymptotic variance at
aparticular frequency only depends on the ratio of the input
andnoise spectra at that particular frequency.
A refined asymptotic variance expression (still asymptotic
inmodel order) for frequency function estimates with
improvedaccuracy (for many model structures) was proposed in
Ninness,Hjalmarsson, and Gustafsson (1999a,b)and expressions that
areexact for finite model orders were derived in Ninness
andHjalmarsson (2004)and Xieand Ljung (2001, 2004). More recently,a
variance expression for finite sample sizes and model ordershas
been presented in Hjalmarsson and Ninness (2006). Theoriginal
result in Ljung (1985) can also be used for closed
loopidentification and this was extended to some alternative
closedloop identification methods in Gevers, Ljung, and Van den
Hof(2001). The asymptotic variance for parameter estimates in
aBoxJenkins model was analyzed inForssell and Ljung(1999)fora whole
range of different identification methods. Closed loopasymptotic
variance expressions that are exact for finite modelorders are also
presented inNinness and Hjalmarsson (2005a,b).
There are numerous other properties of the system, besidesthe
frequency function, that could be of interest to estimate.Recently,
a geometric interpretation of the asymptotic variance hasbeen
developed (Hjalmarsson & Mrtensson, 2007)and, when
theunderlying system is causal, linear and time-invariant (LTI),
thesetechniques have been used to derive more transparent
expressionsfor the asymptotic variance for estimates of system
quantitiesthat can be represented by smooth functions of the
estimatedparameters (Mrtensson & Hjalmarsson, 2007). In this
paper thefocus is on poles and zeros of causal LTI systems.
Particularlyinteresting from a control perspective are unstable
poles and non-minimum phase zeros, i.e. poles and zeros outside the
unit circle,since they pose fundamental performance limitation on
the closedloop system(Skogestad & Postlethwaite, 1996).
0005-1098/$ see front matter 2009 Elsevier Ltd. All rights
reserved.doi:10.1016/j.automatica.2009.08.001
http://www.elsevier.com/locate/automaticahttp://www.elsevier.com/locate/automaticamailto:[email protected]:[email protected]://dx.doi.org/10.1016/j.automatica.2009.08.001http://dx.doi.org/10.1016/j.automatica.2009.08.001mailto:[email protected]:[email protected]://www.elsevier.com/locate/automaticahttp://www.elsevier.com/locate/automatica
-
8/11/2019 Artigo erro varincia identificao.pdf
2/14
J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009) 25122525
2513
A series of results regarding the asymptotic variance ofpoles
and zeros has been presented over the past years. Non-
minimum phase zeros were treated for different model
structuresin Hjalmarsson and Lindqvist (2002), Lindqvist (2001)
andMrtensson and Hjalmarsson(2003) where it was found that
theasymptotic variance approaches a finitelimit as the model
ordergoes to infinity. For ARX models these results were
extended
to closed loop identification in Mrtensson and
Hjalmarsson(2005a), where also similar results were presented for
poleswith magnitude larger than one. Asymptotic variance
expressionsthat are exact for finite model orders were derived for
zeroswith arbitrary location in Mrtensson and
Hjalmarsson(2005b).
It should be noted that the asymptotic variance can be a
poormeasure of the variance for finite sample size, see
Vuerinckx,Pintelon, Schoukens, and Rolain (2001) where also a more
accuratemethod to construct finite sample size confidence bounds
forestimated zeros and poles is presented.
In this paper,the results on the asymptotic variance of poles
and
zeros referred to above are combined and generalized to a
unifiedtheory on the asymptotic variance of poles and zeros of
estimatedcausal LTI systems. We put emphasis on presenting,
analyzingand interpreting the results, but the derivations (proofs)
of the
variance expressions are also included to make the document
self-contained. The results hold for prediction error
identification.
Outline
This paper is organized in the following way. In Section2
theproblem set-up, the standing assumptions, that will hold
through-out the paper, and some notation are introduced. The main
tech-
nical results are presented in Section 3. The asymptotic
variance ofestimated zeros and poles located in the open unit
disc|z| < 1 isdiscussed in Section 4 which is followed by
Section 5 covering poleswith magnitude larger than one.
Section6covers zeros with mag-nitude at least one and in Section7
some conclusions are drawnbased on the analysis of the variance
expressions and some simu-
lations arepresented to investigate theaccuracyof
theexpressions.Section 8 contains a brief summary of the findings
and Appendix Acontains results that are needed for the proofs of
the paper.
Notation
The multiplicity of a root zo of a polynomial A(z)is defined
asthe integerk for which the limit limzzo A(z)/(zzo)k = c= 0exists.
Two polynomials are said to be coprime if they have nocommon roots.
A rational transfer function Q = Qn/Qd, whereQn and Qdare coprime
polynomials in z
1, is said to be minimumphase ifQn(z)= 0 or Qd(z)= 0 implies|z|
< 1. A zerozo ofQ issaid to be non-minimum phase (NMP) if|zo|
> 1.Qis said to bestable ifQd(z)= 0 implies|z| < 1. A rootzp
to Qd(z)= 0 with|zp|> 1 is said to be an unstable pole ofQ.
For a transfer function Z(q)with a zero at zo, we will use
the
notationZ(q)=Z(q)/(1 zoq1). Itwill be clear from the
contextwhich zerozo that is used.
For a rational transfer functionG,Gdenotes a transfer
functionwhich satisfies|G(ej)| = |G(ej)| for all for which G(ej)
isdefined and which has all its zeros and poles in the closed
unitdisc|z| 1. That such a function exists follows from the
spectralfactorization theorem.
We shall consider vector-valued complex functions as row
vectors and the inner product of two such functions f(z),g(z):C
C1m is defined asf,g = 1
2
f(e
j)g(ej) d whereg denotes the complex conjugate transpose ofg.
When fandgare matrix-valued functions, we will still use the
notation
f,g to denote the integral 1
2 f(ej)g(ej) d whenever thedimensions off andgare compatible.
The space L2consists of all
Fig. 1. Block diagram of SISO LTI system with output
feedback.
functionsf: C C1m such thatf,f
-
8/11/2019 Artigo erro varincia identificao.pdf
3/14
2514 J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009)
25122525
noise with unit variance, and where we assume that the
feedbackcontroller K stabilizes the system. When this system is
modeled as
yt= G(q, )ut+H(q, )et,with G and Hgiven by (1), and the
parameter vector is estimatedusing prediction error identification
with a least-squares costfunction, the asymptotic covariance matrix
for the parameter
estimate
N (Nis the sample size, i.e. the number of input/output
measurements) is given by
P=o1,where
= 12
(ej)(ej) d , (4)
where in turn
(q)=
Go
Ho
So
AoRna (q)
So
Ao
o na (q)
GoHo
So
BoRnb (q)
KGoSo
Bo
o nb (q)
0 1Co
o nc(q)
0 1
Do
o nd (q) Go
Ho
So
FoRnf (q)
KGoSo
Fo
o nf (q)
, (5)
where n(q)= [q1, . . . , qn]T, and whereSo
1
1+GoKis the sensitivity function.
It can be shown also, using Gauss approximation formula, thatthe
asymptotic variance of an estimate of a root zo of one of
thepolynomialsAoFoof the true system is given by
AsVarzo P, (6)
where
dz( )
d
=o
.
For exact conditions for the above asymptotic results to hold
werefer to Chapters 89 inLjung(1999).
Since(6)implies the approximation
E|z(N) zo|2 AsVarzo/N (7)for the finite sample size variance of
an estimate z(N) of a root ofone of the polynomialsAoFo, AsVarz
o provides information aboutthe variance of root estimates for
large sample sizes. The objectiveof this paper is to analyze the
right-hand side of(6) and we willmake the following assumptions
which will hold throughout the
paper.
Standing Assumptions 2.1. The polynomials Co, Do and Fo
areminimum phase. The rational transfer function R is minimumphase.
WithK= Kn/Kd , whereKnandKdare coprime polynomialsinz1, it holds
that
Acl=AFKd+BKnhas all its roots strictly inside the unit circle.
The matrix , definedin(4),is non-singular and the noise variance is
positive,o > 0.Finally, all results are valid only for roots of
multiplicity 1.
The conditions above are standard in a system
identificationcontext, cf.Ljung(1999). The minimum phase conditions
onCo,DoandFo guarantee that the one-step ahead predictor of the
output
is stable. Thus poles outside the open unit disc|z| < 1 are
locatedin Ao. In prediction error identification, only the spectrum
of the
Table 1
Details forTheorem 3.1.
Polynomial L(z) i
AozHo(z)Go (z)So (z)R(z) 1
BozHo (z)Go (z)R(z) 1
CozHo (z)
Ho (z)
2
Do zHo (z)Ho (z) 2Fo
zHo(z)Go (z)So (z)R(z) 1 See Remark 3.2.
reference signal matters andR should be interpreted as a
spectralfactor of this spectrum and hence the stability and
minimumphase conditions on this quantity are not particularly
restrictive,save that periodic signals are not covered.
Furthermore, the datashould be generated under stationary
conditions which require thetransfer functions fromr ande to u and
y to be stable. Since, asnoted above, Ao contains all poles on or
outside the unit circle,this is equivalent to the closed loop pole
polynomial Acl beingminimum phase. The non-singularity ofis a joint
condition onidentifiability at
o and persistence of excitation. A sufficient andnecessary
condition for this assumption to hold is that the rowsof are
linearly independent. This in turn requires both pairs{Co,
Do}and{Bo, Fo}to be coprime. We refer toGevers, Bazanella,Bombois
and Miskovic(2009)for interesting recent sufficient andnecessary
conditions for the asymptotic covariance matrix to
benon-singular.
3. General results
In this section we present the main technical results of
thispaper. The first result, Theorem 3.1, will give us a
generalexpression for the asymptotic variance of a pole or zero
identifiedin open or closed loop, and that expression will be a
starting pointfor deriving more explicit expressions.
3.1. Characterization in terms of basis functions
Theorem 3.1 (A General Result). The asymptotic variance of a
root zo
of any of the polynomials Ao, Bo, Co , Door Fois given by
AsVarzo = o|L(zo)|2K i(zo,zo), (8)whereK i is the ith diagonal
element of
K(,z)
nk=1
Bk ()Bk(z), (9)
where{Bk}nk=1 is any orthonormal basis for the rowspace of
(defined by(5)).Table1provides L and i for the different cases A
oFo.For roots of Ao, Boand Fo, the result(8) holds only if R=0.
Furthermore, when some parameters are known, the above
result
still holds, save that the rows of that correspond to the
knownparameters should be removed when computing th e subspace used
togenerate K.
Proof. The proof is given inAppendix B.
Remark 3.2. In the cases marked by inTables 1and 2we
havethatL(zo)= 0 (forAthis only holds in open loop operation).
Thisdoes of course not mean that the asymptotic variance is zero.
Thereason is that K i(z,z) has a pole at the same location that
cancelsthe zero inL. To see this we use that K i(z,z) can be
written
K i(z,z)=i (z) 12
(ej)(ej) d 1 i(z), (10)
-
8/11/2019 Artigo erro varincia identificao.pdf
4/14
J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009) 25122525
2515
where iis the ith column of, see Appendix B. Take now, e.g.,
thecaseCo where L(z
o)= 0 since Co(zo)= 0. In that case there is afactor 1/Co(z
o) in 2(zoc) that cancels the factor Co(z
o) in L(zo).
We illustrate the use ofTheorem 3.1with an example.
Example 3.3. Consider the FIR system
yt
=(1
ej q1)(1
ej q1)ut
1
+et, (11)
where > 0, where the input is white noise with unit
variance,i.e.R= 1 and whereetis white noise with varianceo= 1.
Wewill useTheorem 3.1to analyze the asymptotic variance of
zeroestimates associated with a FIR model of order n.
In order to compute the asymptotic variance for the zero zo =ej
we first need to determine L in (8).From the second row inTable 1we
obtain L= zHo(z)/Go(z)R(z)for zeros ofBo. For a FIRmodel Ho 1 and
furthermore Go(z)= Go(z)/(1zoz1)=
z1(1 ejz1). Thus
L(ej )= 2ej2
1ej2 .From Table 1 it also follows that i = 1 in (8). We thus
haveto determine the (1, 1)-element of K and for this we need
an orthonormal basis for the predictor gradient . This can
bedone numerically by, e.g. GramSchmidt orthogonalization, andin
Section6.4.2we will see that such a basis can sometimes beobtained
without computations. In this example we notice that= n 0 so an
orthonormal basis is given by zk 0,k=1, . . . , n. Thus we
obtain
AsVarzo = o|L(zo)|2K1(zo,zo)
= 4
2(1cos(2))n
k=1|ej2 |2k
= 2
2(1cos(2))1 2n1 2 . (12)
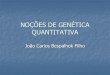
Eq.(12)shows that the asymptotic variance grows
exponentially
with the model order n when 1, i.e. forNMP-zeros.Fig. 2shows the
zero estimates for 100 different noiserealization when 1000
inputoutput samples are used to estimate(11).ComparingFig. 2(a)(b)
shows that for = 1/2 the samplevariance increases indeed quite
significantly when the number ofparameters is increased fromn= 3
ton= 5. On the other hand,Fig. 2(c)(d) show that the increase is
hardly visible when =3/2for the same change in model order.
Eq.(12)shows also that the asymptotic variance will be largewhen
the zeros are close together, i.e. when 0. That this is thecase for
estimated zeros is confirmed by comparing Fig. 2(c) and(e) which
only differ in the angular position of the zeros.
The objective of this paper is to analyze the asymptotic
variance(6)and even though Theorem 3.1provides a characterization
of
this quantity for anyof the polynomialsAoFounder any
stationaryexperimental condition, the result(8)requires further
elaborationin order to provide useful insights. What remains to be
doneis to characterize the function K and this in turn requires
acharacterization of the rowspace of. We shall be able to providean
explicit formula forK onlyfor some special cases but we willbeable
to provide usefulboundsonK under quite general conditions.In fact,
(8) contains structural information that we can extractwithout
having to computeK explicitly. We pursue this idea next.
3.2. Lower bounds in terms of basis functions
Lemma 3.4 (Model Structure Comparison). Consider two
differentmodel structures M1 and M2 defined as in (1)(2)
corresponding to
predictor gradients 1
and 2
(see (5)), respectively, and supposethat the rowspace of 1 is
containedin therowspace of 2. Suppose
that Go= Bo/(AoFo)and Ho= Co/(AoDo)can be described by bothmodel
structures. Then the asymptotic variance for any root of AoFo,when
M1 is used, is no greater than the corresponding asymptoticvariance
whenM2is used.
Proof. The result follows directly from Theorem 3.1 and Lemma
A.1.
However, we can also combineTheorem 3.1 andLemma 3.4
to obtain lower bounds on the asymptotic variance where K
isreplaced by a quantity that is easier to characterize.
Lemma 3.5 (General Lower Bound). The asymptotic variance of
aroot of any of the polynomials Ao, Bo, Co, Do or Fo is bounded
frombelow according to
AsVarzo oLlb(zo)2 Klb(zo,zo), (13)
where
Klb(,z)
k
Bk ()Bk(z). (14)
Here{Bk} is any orthonormal basis for the rowspace of the
vectorspecified inTable2 for the different polynomials.Table2also
defines
the function Llb. In the table, Ry and Ru are transfer functions
with allzeros strictly inside th e unit circle and no poles outside
the unit circle,satisfying
|Ry(ej)|2 = |R(ej)|2 + o|Ho(ej)|2
|Go(ej)|2 ,
|Ru(ej)|2 = |R(ej)|2 + o|Ho(ej) K(ej)|2.(15)
Proof. The proof is given inAppendix C.
The usefulness of Lemma 3.5 is that the subspace which thebasis
functions {Bk} should span is much simpler than thecorresponding
space inTheorem 3.1,cf. (5)with the functionsgiven in Table 2.
Infact, we will be able to use results in Appendix Ato provide
explicit bounds and expressions for Klb.
Corollary 3.6. Equality holds in(13)for FIR and OE models. This
alsoholds for BoxJenkins models when the condition
KGoSo
Bonb+nf is orthogonal to
1
CoDonc+nd (16)
is satisfied.
Proof. The proof is given inAppendix D.
Remark 3.7. Notice that(16)holds when the system is operatingin
open loop, i.e.K 0.Remark 3.8. The ratio between the two terms
o|Ho|2|Go|2 and |R|
2 that
defineRy is the ratio of the parts of the output spectrum that
are
due to the noise and the reference signal. Similarly, the ratio
ofthe two terms that define Ru is the ratio of the parts of the
inputspectrum that are due to the noise and the reference
signal.
The following lemma provides bounds for Ry and Ru
definedin(15).
Lemma 3.9 (Bounds on Ry and Ru).When Godoes not have zeros onthe
unit circle, it holds that Ry, defined
by(15)inLemma3.5,satisfies
1+inf
o|Ho(ej)|2|R(ej) Go(ej)|2
Ry(zo)R(zo)
2 1+sup
o|Ho(ej)|2
|R(ej) Go(ej
)
|2
, (17)
when R is not identically zero, and Ry=o Ho/Gowhen R0.
-
8/11/2019 Artigo erro varincia identificao.pdf
5/14
2516 J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009)
25122525
(a)n=3, =1/2, = /4. (b)n=5, =1/2, = /4. (c)n=3, =3/2, = /4.
(d)n=5, =3/2, = /4. (e)n=3, =3/2, = /10.
Fig. 2. Simulation results forExample 3.3.
Table 2Details forLemma 3.5.
Polynomial Llb(z) {Bk}spans rows of
AozHo (z)Go (z)So (z)Ry(z) Go SoRyHoAo na
BozHo (z)Go (z)Ru(z) GoSoRuHo BoFo nb+nf
CozHo (z)Ho (z) 1CoDo nc+nd
Do zHo (z)Ho (z) 1CoDo nc+ndFo
zHo (z)Go (z)So (z)Ru(z) GoSoRuHo BoFo nb+nf See Remark 3.2.
Furthermore when Hoand K are stable, Ru, also defined
by(15)inLemma3.5,satisfies
1+inf
o|Ho(ej)K(ej)|2|R(ej)|2
Ru(zo)R(zo)2
1+sup
o|Ho(ej)K(ej)|2|R(ej)|2 , (18)
when R is not identically zero, and
Ru=oHoK wh en R0. (19)Proof. The proof is given inAppendix
E.
3.3. Explicit lower and upper bounds
We now provide bounds which indicate how the asymptoticvariance
of estimated roots depends on the model order.
Theorem 3.10. The asymptotic variance of a root of any of
the
polynomials Ao, Bo, Co, Door Fois bounded according to
o|zo|2c11 |zo|2m2
1 |zo|2 AsVarzo
c21 |zo|2m2
1 |zo|2 , (20)
where m and c1 are given in Table 3 and where c2 = c2(Go, Ho,K,
R, o)also depends on which polynomial that z
o belongs to (but
not on any of the orders of the estimated polynomials), and
where
m=mabf na+nb+nf+mofor some finite mo0,for zo belongingto Ao,
Boand Foand wherem=mcd na+ nb+ nc+ nd+ nf+ mo
for some finite mo0, for zo
belonging to Coand Do.
Proof. The proof is given inAppendix F.
Notice thatTheorem 3.10also applies to the case|zo| = 1,
bysetting
1|zo|2m21|zo|2 = m in (20). This is relevant forAoand
Bowhich
are allowed to have such roots, but not for the other
polynomials
(byStanding Assumptions 2.1).
3.4. Explicit characterization for BoxJenkins models
Building on Corollary 3.6, we can provide explicit upper
bounds
for the asymptotic variance of the roots for FIR, output error
and
BoxJenkins models under certain restrictions. In some cases
it
follows fromCorollary 3.6that these bounds are tight.
-
8/11/2019 Artigo erro varincia identificao.pdf
6/14
J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009) 25122525
2517
Table 3
Details forTheorem 3.10.
m c1
Ao na1
|Ao(zo )|2 min Ho (ej )Ao (ej )
So (ej )Go (ej )Ry (ej )
2Bo nb+nf 1|Bo (zo)Fo(zo )|2 min
Ho (ej )Bo (ej )Fo(ej )So (ej
)Go(ej )Ru(ej
)
2Co nc+nd 1|
Co(z
o)Do (zo )|2 min
Co(ej )Do(e
j )
2
Do nc+nd1
|Co(zo)Do (zo )|2 min Co(ej )Do(ej )2Fo nb+nf 1|Bo (zo)Fo(zo )|2
min
Ho (ej )Bo (ej )Fo(ej )So (ej
)Go(ej )Ru(ej
)
2
Theorem 3.11 (FIR, OE and BJ Models). Assume that the model
structure is FIR, OE or BoxJenkins, where for the latter we
assume
that(16)holds.
The asymptotic variances of theroots of the Coand
Dopolynomials
are given by
AsVarzo =|Co(1/zo)Do(1/z
o)|2|Z(zo)|2
|zo|2(nc+nd)(|zo|2 1) , (21)
where Z=CoDofor a root of Coand Z=DoCofor a root of
Do.Furthermore, denote the denominator of GoSoRuBoFoHo (after
cancella-
tions) by A and suppose in the following that the order n of
this
polynomial is less than nb+nf.Denote the order of the numerator
of GoSoRu
BoFoHo(after cancellations)
by m. Then the asymptotic variance of a root zo = 0of the Bo or
Fopolynomials, with|zo| = 1, is bounded from above according to
AsVarzo 1(1 |zo|2)
o|Ho(zo)|2|Go(zo)So(zo)Ru(zo)|2
1|A(1/zo)|2
|A(zo)|2 |zo|2(nb+nf+m)
, (22)
where Ruis defined inLemma3.5.
For a root of Bo with magnitude 1, i.e.
|zo
| = 1, the asymptotic
variance is bounded from above according to
AsVarzo o|zoHo(z
o)|2|Go(zo)So(zo)Ru(zo)|2
nb+nf+mn+n
k=1
1 |k|2|zo k|2
, (23)
where the{k}nk=1are the roots of A.When m = 0, i.e. when the
numerator of GoSoRu
BoFoHois constant,
equality holds in(22)and(23).
Proof. The proof is given inAppendix G.
In the following sections we will interpret and elaborate on
theresults in this section.
4. Zeros and poles in the open unit disc|z| < 1
Due to the factor |zo|2m in the numerator of(20), Theorem
3.10shows that the asymptotic variance for zeros and poles with
magnitude less than one increases exponentially with the order
of
the corresponding polynomial, cf.Example 3.3.Thus, the
accuracycan be poor even when only a moderate number of parameters
are
used for a certain polynomial. We alert the reader that the
result
holds regardless of whether the system is operating in open
orclosed loop. Also notice that the asymptotic variance for a root
of
Co(Do) can belarge evenifnc(nd) is small. This happens ifnd(nc)
is
large since m=nc+ndfor the Coand Dopolynomials (see Table 3).A
similar conclusion holds for Boand Fo.
For open loop operation, or whenever (16) holds, an exactformula
for the asymptotic variance of the roots of the noise
modelpolynomials Co and Do is given in Theorem 3.11 by (21).
Thistheorem also gives an exact expression for roots ofFounder
certainconditions. Notice that these formulae exhibit the
exponentialgrowth with the order discussed in the preceding
paragraph.
We conclude that accurate identification of zeros and
polesstrictly inside the unit circle is inherently difficult for
model
structures of high orders.
5. Unstable poles
In this section we will study the asymptotic variance of
esti-mates of poles located strictly outside the unit circle. By
assump-tion, all such poles are contained in Ao , see the
discussion belowStanding Assumptions 2.1.Since the theory covers
stationary ex-perimental conditions, closed loop operation is
necessary for theresults in this section to hold.
Theorem 3.10provides generally applicable lower and upperbounds
for the asymptotic variance of an unstable pole. However,more
transparent expressions canbe obtained by considering largemodel
orders. We have the following result.
Theorem 5.1 (Unstable Poles).Consider a root zo of Ao with|zo|
>1. The asymptotic variance AsVarzo increases monotonically to
a
finite limit as n= na+ nb+ nc+ nd+ nf tends to infinity.
Thelimit is bounded from above according to
limn
AsVarzo o Co(zo)Ao(zo)Do(zo)
2 K(zo)R(zo)2 1(1 |zo|2) (24)
and, provided na , bounded from below by
o
Co(zo)Ao(zo)Do(zo)2 K(zo)Ry(zo)
2 1(1 |zo|2) limn AsVarzo, (25)where Ry is defined by
(15)inLemma3.5.
Proof. The proof is given inAppendix H.
The upper bound in Theorem 5.1 shows that, contrary to
polesstrictly inside the unit circle (see Section 4), the
asymptoticvariance for unstable poles converges to a finite limit
as the modelorder increases. FromTheorem 5.1we see that the
location of thepole is critical for the asymptotic variance when
the number ofparameters in A is large. A pole close to the unit
circle will havehigh asymptotic variance.Furthermore, we see that
also the gain ofthe controller at the pole is important for the
asymptotic variance.
Notice that Lemma 3.9 gives that|Ry(zo)| > |R(zo)| whichshows
that the lower bound inTheorem 5.1is indeed lower thanthe upper
bound in the same theorem. In the following subsectionswe will
consider some special cases where Ry can be expressedexplicitly and
which will shed further light on the asymptoticvariance of unstable
poles.
5.1. High SNR at the output
Corollary 5.2. For a root zo of Aowith|zo|> 1, it holds
limna
AsVarzo
o
Co(zo)Ao(zo)Do(zo) 2 K(zo)R(zo) 2 1(1|zo|2) =1, (26)when
sup
o|Ho(ej)|2|R(ej) Go(ej)|2
0. (27)
Proof. In the limit(27)it follows from(17)that|R(zo)/Ry(zo)| 1
and hence the lower bound(25)equals the upper bound(24)inthe
limit(27).
-
8/11/2019 Artigo erro varincia identificao.pdf
7/14
2518 J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009)
25122525
Corollary 5.2shows that at high SNR at the output, cf. Remark
3.8,the asymptotic variance of a pole of the system,located outside
theunit disc, is approximately equal to the upper bound in(24).
5.2. Proportional signal and noise spectra at the output
When the two terms defining Ry, see Lemma 3.5, areproportional
to each other, the lower bound in Theorem 5.1can
be expressed explicitly.
Corollary 5.3. Assume that R= Ho/Go for some > 0. Thenfor a
root zo of Aowith|zo|> 1 it holds
1
1+ o
K(zo) Bo(zo)Ao(zo)Fo(zo)
2
1
(1 |zo|2) lim
naAsVarzo. (28)
Proof. With R = Ho/Go = Fo/(BoDo), it follows thatRy=
o+ Fo/(
BoDo) and(25)inTheorem 5.1gives the result.
5.3. Costless identification
The case when there is no external excitation, i.e. R 0, hasbeen
coined costless in Bombois, Scorletti, Gevers, Van den Hof,and
Hildebrand(2006) since identification can be performed inclosed
loop without perturbing the system from normal
operatingconditions.
Corollary 5.4. Assume R0. Then for a root zo of Aowith |zo| >
1,it holdsK(zo)
Bo(zo)
Ao(zo)Fo(zo)
21
(1 |zo|2) limna AsVarzo. (29)
Proof. Follows directly fromCorollary 5.3by setting
=0.
InCorollary 5.4we see again the critical role that the pole
locationand the controller gainK(zo) play for the asymptotic
variance of apole outside the unit disc.
6. Non-minimum phase zeros
Now we turn to the asymptotic variance of non-minimumphase zeros
of the system. Here the results below cover both openand closed
loop identification.
Theorem 6.1 (NMP-zeros).Consider a root zo with|zo| > 1of
Bo.The asymptotic variance increases monotonically to a finite
limit asn=na+nb+nc+nd+nftends to infinity.
The limit is bounded from above according to
limn
AsVarzo o|Ho(zo)|2|Go(zo)R(zo)|2 1(1 |zo|2) (30)and, provided
nb+nf , bounded from below by
o|Ho(zo)|2|Go(zo)Ru(zo)|2 1(1 |zo|2) limn AsVarzo. (31)Equality
holds in(31) for FIR and OE models as well as BoxJenkinsmodels
subject to(16).
Proof. The proof is given inAppendix I.
As for poles outside the unit disc, we see that the
asymptoticvariance of an NMP-zero converges to a finite limit as
the modelorder increases. We see also that the location is
important for the
asymptotic variance of a zero. An NMP-zero close to the unit
circlewill have large asymptotic variance.
6.1. Open loop operation or high SNR at the input
Corollary 6.2. For a root zo of Bowith|zo|> 1, it holds
limnb+nf
AsVarzo
o
Ho(z
o)
Go(zo)R(zo)
2
1
(1|zo|2)
=1, (32)
when
sup
o|Ho(ej)K(ej)|2|R(ej)|2 0. (33)
In particular,(32)holds in open loop operation, i.e. when K
0.Proof. In the limit(33)it follows from(18)that|R(zo)/Ru(zo)| 1
and hence the lower bound(31)equals the upper bound(30)inthe
limit(33).
From Corollary 6.2 we are able to conclude that the upper bound
inTheorem 6.1 is attained when thesystem is operating in open
loop.Furthermore, for closed loop operation at high SNR at the
input, cf.Remark 3.8,and with a large number of parameters in
Band/orF,the asymptotic variance becomes equal to the asymptotic
variancein open loop operation.
6.2. Proportional signal and noise spectra at the input
When the two terms defining Ru, see Lemma 3.5, areproportional
to each other, the lower bound in Theorem 5.1canbe expressed
explicitly.
Corollary 6.3. Assume that R=HoK for some > 0 . Then fora
root zo of Bowith|zo|> 1 it holds
1
1+ o
1K(zo) Bo(zo)Ao(zo)Fo(zo)
2
1
(1 |zo|2) limnb+nf AsVarzo. (34)
Equality holds in(34) for FIR and OE models as well as
BoxJenkins
models subject to(16).Proof. WithR=HoK, it follows thatRu= o+
HoKand(31)inTheorem 5.1gives the result.
Corollary 6.3provides some insight regarding the role played
bythe controller for the asymptotic variance of NMP-zeros.
SinceK(zo) appears in the denominator in the lower bound(34),a
smallcontroller gain will result in a large asymptotic
varianceexactlythe opposite to what is the case for poles outside
the unit disc, cf.Section5.
6.3. Costless identification
Corollary 6.4. Assume R0. Then for a root zo of Bowith|zo| >
1it holds
1K(zo) Bo(zo)Ao(zo)Fo(zo) 21
(1 |zo|2) limnb+nf AsVarzo. (35)
Equality holds in(35) for FIR and OE models as well as
BoxJenkinsmodels subject to(16)
Proof. Follows directly fromCorollary 6.3by setting =0. Asin
Corollary 6.3 we seethat Corollary 6.4 embodies the messagethat a
small controller gain at the NMP-zero of interest implies alarge
asymptotic variance.
6.4. Finite model order results
For FIR, OE and BoxJenkins models we can useTheorem 3.11to
obtain results for finite model orders for NMP-zeros.
-
8/11/2019 Artigo erro varincia identificao.pdf
8/14
J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009) 25122525
2519
6.4.1. Upper bounds
Notice thatSo(zo)= 1 for a zero ofBo so the upper bound in
(22)is the same as the asymptotic limit in Corollary 6.2,save
for
the factor1|A(1/z
o)|2|A(zo)|2
|zo|2(nb+nf+m)
(36)
which converges to 1 asnb+nf . The upper bound(22)canbe
evaluated also for the remaining special cases ofRuused in the
preceding subsections, i.e. proportional noise and signal
spectra at
the input and costless identification. The results are finite
model
order upper boundsthat areequalto the asymptotic in model
order
lower bounds(34)and (35),respectively, but with(36)as added
factor.
6.4.2. Exact results
Theorem 3.11can also be used to obtain exact expressions for
the asymptotic variance. For open loop operation we have the
following result.
Theorem 6.5 (Open Loop/FIR, OE and BJ Models). Assume that
the
model structure is FIR, OE or BoxJenkins and that K 0.
Assumefurther that Do= 1and that R has no zeros. Denote the
polynomialF2o Co/R by Aand suppose that nb+ nfis larger than the
order of this
polynomial. Then the asymptotic variance of a root zo =0 of Bo,
with|zo| =1, is given by
AsVarzo = 1(1 |zo|2)
o|Ho(zo)|2|Go(zo)R(zo)|2
1|A(1/zo)|2
|A(zo)|2 |zo|2(nb+nf )
. (37)
When|zo| =1, the asymptotic variance of root zo of Bois given
by
AsVarzo =
o|zo H
o(zo)
|2
|Go(zo)R(zo)|2
nb+nfn+n
k=1
1 |k|2|zo k|2
, (38)
where the{k}nk=1are the roots of A.Proof. Follows directly
fromTheorem 3.11.
Notice that the above theorem is valid not only for NMP-zeros
but
for any zeros. For closed loop operation we have the
following
result.
Theorem 6.6 (Closed Loop/FIR and OE Models). Assume that the
model structure is FIR or OE and that the controller K= Kn/Kd=
0is such that Knand Kdare coprime stable polynomials such that
Fo=F1Knfor some polynomial F1 . Suppose further that R= K for
some > 0and that nb+nfis at least the order of Fo(FoKd+Bo).
Thenthe asymptotic variance of a root zo =0 of Bo, with |zo| = 1,
is givenby
AsVarzo = 1(1 |zo|2)
1
1+ o
1
|G(zo)K(zo)|2
1|A(1/z
o)|2
|A(zo)
|2 |zo|2(nb+nf )
, (39)
where A=Fo(F1Kd+Bo).
When|zo| = 1, the asymptotic variance is given by
AsVarzo = |zo|2
1+ o
1
|G(zo)K(zo)|2
nb+nfn+n
k=1
1 |k|2|zo k|2
, (40)
where the{k}nk=1are the roots of A.Proof. Follows directly
fromTheorem 3.11.
Theorem 6.6 is the NMP-zero counterpart to Theorem 4.1 inNinness
and Hjalmarsson(2005b)where asymptotic variance forfrequency
function estimates is considered. The condition on R canbe
interpreted as that the feedback controller is u = K(r y)(rather
than u=Kyras we have assumed throughout the paper)where the
referenceris white noise.
7. Interpretations of the results
In the previous sections we have presented a number
ofexpressions and simplified bounds for the asymptotic varianceof
roots of the polynomials AoFo. We will now summarize and
interpret our major findings.
Roots inside versus outside the unit circle
An important result of this paper is that the
asymptoticvariances of zeros and poles strictly inside the unit
circle behavefundamentally different from the asymptotic variances
of NMP-zeros and unstable poles when the model order is
increased.Theorem 3.10 shows that the former grow exponentially
whileTheorems 5.1 and 6.1 show that the latter converge to finite
limits.Theorems 6.5 and 6.6 show that forFIR, OE
andBoxJenkinsmodelsthe convergence for NMP-zeros is exponentially
fast, with rate1/|zo|, under certain conditions. Thus roots closer
to the unit circleimply slower convergence. Although this has not
been proven, webelieve this to be true in general for both poles
outsidethe unit disc
and NMP-zeros.
Roots on the unit circle
Combining the upper and lower bounds in Theorem 3.10givesthat
for the borderline case with a root on the unit circle,
theasymptotic variance grows linearly with the model order. This
issimilar to what happens for frequency function estimates
(Ljung,1985;Ninness & Hjalmarsson, 2004).
Roots close to each other
FromTheorem 3.1it follows that the asymptotic variance of
arootof one ofthe polynomials blowsup whenthere isa nearbyrootof
the same polynomial. The reason is that a root is very
sensitive
to errors in the parameters of the polynomial in this case.
Forexample, for the second order polynomial z2 +1z+2, it
holdsthat
dz( )
d =1
2 1
2
2142
12142
T,
which tends to infinity as 21 42, i.e. when the polynomial hasa
double root at1/2. In fact the standard asymptotic analysis,which
is based on the first order Gauss approximation formula,breaks down
for roots of higher multiplicity than 1. This does notimply that
the variance of root estimates becomes infinite for,e.g., double
roots, instead the convergence rate becomes slowerthan the 1/Nrate
given in(7).We will not pursue this here butsimply conclude that
the result above indicates that there are
significant problems associated with estimating roots of
highermultiplicity than one.
-
8/11/2019 Artigo erro varincia identificao.pdf
9/14
2520 J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009)
25122525
NMP-zeros
The universal upper bound
limn
AsVarzo o|Ho(zo)|2
|
Go(zo)R(zo)|2
1
(1 |zo|2) (41)
fromTheorem 6.1is useful when the reference signal is
non-zero.
Notice that the bound is model structure independent. It is
alsotight in open loop operation and for high signal to noise
ratios atthe input (see Corollary 6.2) in closed loop operation,
and above wehave argued that the convergence rate with respect to
the modelorder is likely to be exponentially fast (at least we have
shown thisfor some special cases). Thus the right-hand side
of(41)providesin many cases a quite reasonable approximation of the
asymptoticvariance for a NMP-zero.
The reason why (41)becomes tight when the signal to noiseratio
at the input increases can be understood from the fact thatthe
sensitivity function of the closed loop becomes unity whenevaluated
at a zero of the system. Thus the feedback does notcontribute to
the excitation at a system zero and when the signaltonoise ratio
atthe input ishighso thatthe noise fed backto theinput
does little to excite the system, the open loop case is
recovered.The above observation has several implications. The
firstconcerns how open loop identification compares to closed
loopidentification. It is well known that for BoxJenkins models
closedloop identification with a reference signal having spectral
factorR,so that the part of the input due to the reference signal
is SoR, isnever worse than open loop identification with a
reference signalhaving spectral factor SoR (Agero & Goodwin,
2007; Bombois,Gevers, & Scorletti, 2005). For NMP-zeros, it
follows from(41)thatthis holds for high model orders for any
modelstructure also whenRis the spectral factor of the input in
open loop identification.
Secondly, the universality of (41) also implies that, forhigh
model orders, indirect and direct identification result insimilar
asymptotic variance of NMP-zeros. Recall that in
indirectidentificationris used as input rather than u(Ljung,
1999).
Thirdly, notice that very different input spectra will result
insimilar asymptotic accuracy. We illustrate this with an
example.
Example 7.1. Consider the first order ARX system
(10.9q1)yt= (q1 +1.1q2)ut+et, (42)where the input is given byut=
rt 10.5q
11+0.3q1ytand wherertand
etare independent white noise, both with unit variance. This
shallbe compared with the open loop case when the input is given
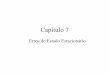
byut= rt. The input spectra are plotted inFig. 3and in this
example,they are very different in open and closed loop (for the
closed loopcase both the total input spectrum u and
ru , which is the part
of the spectrum that originates from the reference signal rt,
are
plotted). Despite this big difference, the variance of the
estimatedzero does not change, at least not for high model
orders.
The system (42) is simulated in both open and closed loops.From
the closed loop simulations we use both direct andindirect
identification. For the open loop case and for the
directidentification in the closed loop case, an ARX model is
estimatedfrom 1000 samples ofutandyt. For the indirect
identification weestimate an ARMAX model from 1000 samples ofrt and
y t. Thevariance of the estimated zero, from
5000MonteCarlosimulations,is presented inTable 4.The model orderno
represents the order ofthe true system, i.e., na = 1 and nb = 2 in
the ARX model andna = 3, nb = 3 and nc= 1 for the ARMAX model. When
themodel order is increased, no + k means that na and nb has
beenincreased by k , and nc is unchanged. The values in the table
are
the variances from the simulations, multiplied byN= 1000.
Theasymptotic value 5.8 is the upper bound given by(41).
Table 4
Variance of estimated non-minimum phase zeros from Monte Carlo
simulations in
open and closed loops.
n Open loop Closed loop direct id. Closed loop indirect id.
no 2.3 0.21 4.7
no +2 4.0 1.8 6.6no +5 6.9 4.5 7.3no +10 6.9 7.2 6.2n
o
+15 6.0 6.5 5.5Asympt. 5.8 5.8 5.8
frequency
Inputspectrum
r
103
102
101
100
101
1020 0.5 1 1.5 2 2.5 3
u(), closed loop
u(), open loop
u(), closed loop
Fig. 3. Inputspectrum for Example7.1. Theinput spectra are very
differentin open
and closed loops. This does not affect the accuracy of the zero
estimates.
What we see is that the direct identification in closed
loopperforms best for low model orders, but already fromno +5
andup, all three cases give about the same variance, just a little
higherthan the asymptotic value.
Next we make some further comments on the accuracy ofestimated
non-minimum phase zeros, based on(41).
Usually there is a tradeoff between bias and variance in the
sense that a low order model results in a biased estimate
withlow(er) variance and a high order model gives an
un-biasedestimate with high(er) variance. When it comes to
NMP-zeros,this increase in the variance is typically small and,
hence, highorder models can be used without the risk of loosing
accuracy,unless the zero is close to the unit circle.
In many identification scenarios the input filter R(q) can
bechosen by the user. The variance is proportional to 1/|R(zob )|2
sothat factor should be small. IfR(q) has a pole atzob this factor
iszero, but that corresponds to an unstable, and hence
infeasible,input filter. An interesting choiceis an autoregressive
filter with
just one pole at 1/zob . Such an input filter is optimal in
thesense that it has the lowest input power among all LTI
filtersthat achieve the same variance, seeMrtensson, Jansson,
andHjalmarsson(2005).
Consider open loop identification and suppose for a momentthat
Go(q) is known and that only the part 1 zoz1 has tobe estimated. In
this scenario,Go(q)= 1 and the input filterRshould be the original
input filter in series with the originalGo(q), since the latter
part of thesystem shapes theinput to thesystem 1 zoz1, which is to
be identified.Notice now that theinput filterR(q)and the
factorGo(q)enter the bound(41)as aproduct, i.e. the bound is the
same if the product between theinput filterand thesystemthat is
identified, excludingthe NMP-zero part, is the same. Thus in the
above scenario, the boundremains thesameas when alsoGo(q) is
identified. Furthermore,we have fromCorollary 6.2,that as nb+nf ,
the bound(41) is attained. Combining these observations we have
that forhigh model ordersand open loop identification it is
insignificantwhetherGo(q)is known or estimated, i.e. knowing
Go(q)andonlyestimating 1zoz1 helpslittle for improving the
accuracy.
-
8/11/2019 Artigo erro varincia identificao.pdf
10/14
J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009) 25122525
2521
Unstable poles
The universal upper bound
limn
AsVarzo o
Co(zo)
Ao(zo)Do(zo)
2
K(zo)
R(zo)
21
(1 |zo|2) (43)
fromTheorem 5.1is useful when the reference signal is
non-zero.
Notice that the bound is model structure independent. It is
also
tight for high signal to noise ratios at theoutput (see
Corollary 5.2)
and above we have argued that the convergence rate with
respect
to the model order is likely to be exponentially fast (at least
we
have shown this for some special cases). Thus the right-hand
side
of(43)provides in many cases a quite reasonable
approximation
of the asymptotic variance for a pole located outside the unit
disc.
The upper bound(43)and the corresponding lower bound(25)
indicate that the controller should be designed so that the gain
at
the pole is small in order to ensure a small asymptotic
variance.
In this context, we point out that if the feedback configuration
is
changed to ut= K(q)(rt y t) instead ofu t= rt K(q)yt asabove,
the controller dependence in(43)and in other expressions
for the asymptotic variance of unstable poles will disappear.
This
is easy to see since this change in controller structure
correspondsto replacingRbyKR.
Costless identification
Forcostlessidentification,i.e. when theexternal referenceis
not
used to excite the system, the lower bounds 5.4and6.4show
that
the controller gain should be small at unstable poles but large
at
NMP-zeros in order for the asymptotic variance to be small.
Thus
there is a conflict when designing suitable experiments when
the
objective is to identify a NMP-zero and an unstable pole that
are
close to each other.
8. Summary
In this paper we derive explicit expressions for the
asymptotic
variance of estimated poles and zeros of dynamical systems.
One
of the main conclusions is that the asymptotic variance of
non-
minimum phase zeros and unstable poles is only slightly
affected
by the model order, while the variance of minimum phase
zeros
and stable poles is very sensitive and grows exponentially with
the
model order. Another important observation is that nearby
roots
have a very detrimental effect on the asymptotic variance.
The asymptotic variance expressions give structural insight
to
how the variance is affected by e.g., model order, model
structure
and input excitation.
Acknowledgments
The authors would like to express their gratitude to the
anonymous reviewers for their many insightful remarks and
for
spurring us to a major revision which, we believe,
significantly
improved the quality of the paper.
Appendix A. Technical results for reproducing kernels
Let{Bk}nk=1 be an orthonormal basis for an n-dimensionalsubspace
Sn L2 and let K(,z)denote the reproducing kernelfor Sn, here
defined as
K(,z)
nk=1
Bk ()Bk(z). (A.1)
The function K(,z)is called a reproducing kernelsince it
holdsthat
f(),K(, ) =f(), f Snf(),K(, ) =ProjSn{f}(), f L2 (A.2)where
ProjSn{f}denotes the orthogonal projection off L2ontoSn, see
e.g.,Heuberger, Wahlberg, and den Hof(2005).
The reproducing kernel is unique and can also be expressed
as
K(,z)=(), 1(z) (A.3)for any whose rowspace spans Sn(Heuberger et
al., 2005).
In the following lemmas we present some properties of
thereproducing kernels of different subspaces which are used in
theproofs of the paper.
Lemma A.1. Consider two subspaces Sn andSm with
reproducingkernelsK(,z) andK(,z) and letSnSm. Then it holds
thatK(z,z)K(z,z). (A.4)Proof. Let{Bk}nk=1 and{Bk}mk=1 be
orthonormal bases for Sn andSm, respectively, with Bk=
Bk,k=1, . . . , n. Then it is clear that
K(z,z) K(z,z)= mk=n+1Bk (z)Bk(z)0,
which concludes the proof.
Lemma A.2. Let the scalar-valued subspaces Sn andSm
havereproducing kernels K(,z)andK(,z). Suppose that there existsa
constant: 0 < 1 such that for every function f Sn thereexists a
function gSmthat fulfills|f(z) g(z)| < |f(z)|, z ZwhereZ is some
region including the unit circle. Then it holds that
K(z,z)
1+ 1
2K(z,z), z Z.
Proof. Since K(,z) itself, as a function ofz, belongs to Sn,
thereis by assumption a family of functionsgSmsuch that|K(,z)
g(z)|< |K(,z)|, z Z.Thus, we can write
K(,z)=g(z) +(z),where
|(z)|< |K(,z)|, z Zwhich also implies that()< K(, )since Z
includesthe unit circle. Hence,
|K(,z)| |g(z)| + |K(,z)|,and by using the CauchySchwarz
inequality and the fact thatK(, ),K(z, ) =K(,z) we get
|K(,z)| 11 |g(z)| =
1
1 |g(),K(z, )|
11 g()
K(z, ) = 11 g()
K(z,z)= 1
1 K(, ) ()K(z,z)
11 K(, ) + ()K(z,z)
11 (K(, ) + K(, ))
K(z,z)
= 1+ 1 K(, )K(z,z).
-
8/11/2019 Artigo erro varincia identificao.pdf
11/14
2522 J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009)
25122525
For =zit holds that K(z,z)= |K(z,z)|and then squaring
theinequality above gives the result.
Lemma A.3. Consider the subspace
Sn Span
z1
M(z), . . . ,
zn
M(z)
, (A.5)
where
M(z)
mi=1
(1 iz1), |i|< 1 (A.6)
and nm. The reproducing kernel of the space Snis given by
K(z,z)=
|z|2
1 |z|2
1|M(1/z)|2
|M(z)|2 |z|2n
,
z=0 & |z| =1,nm+
mk=1
1 |k|2|z k|2
, |z| = 1.(A.7)
Furthermore, the reproducing kernel for the space spanned by
zk,
k=1, 2, . . . can be expressed asK(z,z)= |z|
2
1 |z|2 , for|z|> 1. (A.8)
Proof. For z : z = 0,|z| = 1, the reproducing kernel for Sn
isgiven by
K(,z)= 1 n()n(z)z 1 , (A.9)
where k(z) k
j=11jzzj , see Ninness, Hjalmarsson, and
Gustafsson(1998), and it can also be expressed in terms of
thefunctionM(z) by noting that
n(z)= M(z1)
M(z)zn. (A.10)
Combining (A.9) and (A.10) gives the result (A.7) when |z| =1.
Theresult when|z| =1 follows directly fromNinness and
Gustafsson(1997).
For(A.8)we notice that Bk(z)= zk, k = 1, 2, . . . form
anorthonormal basis and hence
K(z,z)=
k=1|z|2k = |z|
2
1 |z|2 , |z|> 1.
Lemma A.4. Consider the subspace
Sn Span Q(z)
M(z)z1, . . . , Q(z)
M(z)zn , (A.11)
where M(z) is given by(A.6)(with mn) andQ(z) q0+q1z1 + +qnqznq
(A.12)has all zeros inside the unit circle. LetKnbe the reproducing
kernel of
Sn. ThenKn(z,z) is bounded by
Kn(z,z) |z|21 |z|2
1|M(1/z)|
2
|M(z)|2 |z|2(n+nq)
, (A.13)
when z=0 is such that|z| =1 and when|z| =1 by
Kn(z,z)n+nqm+m
k=1
1
|k
|2
|z k|2 . (A.14)
Proof. Define SpasSp Span z1
M(z), . . . ,
zp
M(z)
. (A.15)
If we let p = n+ nq then Sn Sp and Lemma A.1 givesthat
Kn(z,z)
Kp(z,z)where
Kp is the reproducing kernel of
Sp. Lemma A.3gives the right-hand sides of(A.13)and
(A.14)asexpressions forKp(z,z). Lemma A.5. Consider the
subspace
Sn Span
F(z)z1, . . . , F(z)zn
, (A.16)
where F is a rational stable transfer function. Let Kn be
thereproducing kernel of Sn. ThenKn(z,z) is bounded according
to
1 |z|2n21 |z|2 |F(z)|
2 1
sup
F(ej)2 Kn(z,z) 1 |z|
2n2
1
|z
|2 |F(z)|2
1
inf
F(ej)2
. (A.17)
Proof. Observe that the eigenvalues of
1
2
F(ej)2 n(ej)n(ej)d (A.18)are bounded from below by inf
F(ej)2 and from aboveby sup
F(ej)2, see Grenander and Szeg (1958). Hence theeigenvalues of
the inverse of (A.18) are lower bounded by
1
sup|F(ej )|2 and hence
K(z,z)=|F(z)|2
n(z) 1
2
F(ej)2 n(ej)n(ej)d1
n(z)
|F(z)|2 1sup
F(ej)2 n(z)n(z),which gives the lower bound. The upper bound
follows using thelower bound for the eigenvalues.
Lemma A.6. LetSnandKnbeasin Lemma A.4 andlet|z|> 1.Whenthe
dimension n goes to infinity, the reproducing kernel is given
by
limn
Kn(z,z)= |z|21 |z|2 . (A.19)
Proof. Consider the two spaces Sn andSp given by (A.11)and
(A.15) and let Kn(,z) andKp(,z) be the associatedreproducing
kernels. For any value p of the dimension of thesubspaceSp there is
a number r(p) such that there existsparameters ksuch that1L(z)
r(p)
k=0kz
k< 1p , z: |z| 1,
i.e. on and outside the unit circle the function 1/L(z) can
beapproximated arbitrarily well with an FIR-filter by choosinga
sufficiently large number r(p). This is a consequence ofMergelyans
theorem, see e.g.Rudin(1987). Let this FIR-filter be
denotedS(z) r(p)
k=0 kzk. A functionf
Spcan be written as
f(z)= 1
M(z)
pk=1
kzk
-
8/11/2019 Artigo erro varincia identificao.pdf
12/14
J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009) 25122525
2523
for some arbitrary parameters k. Now notice that the
functionL(z)S(z)f(z) belongs to the subspace Sn if we take n =
n(p)=
p+r(p). Thus, for any functionfSp , there isag= LSf
Snsuchthat
|f(z) g(z)| = |f(z) L(z)S(z)f(z)|= |1L(z)S(z)||f(z)|
1
p |f(z)|, z: |z| 1.Lemma A.2can now be applied and gives
1 1p
1+ 1p
2 Kp(z,z)Kn(p)(z,z).The sequence Kn(z,z), n= 1, 2, . . . is
monotonically increasingand for|z| > 1 Lemma A.4 gives the
finite upper boundKn(z,z) |z|
21|z|2 and hence it follows that Kn(z,z)has a limit.
The subsequence Kn(p)(z,z),p= 1, 2, . . . then converges to
thesame limit and we can conclude that
limp
Kp(z,z) lim
n
Kn(z,z).
Lemma A.3gives that the lower bound approaches
limpKp(z,z)= |z|2
1 |z|2 ,
which is the same as the upper bound and that proves the
result.
Appendix B. Proof ofTheorem 3.1
The starting point is the variance expression(6)which also canbe
written as
AsVarzo =o(o), 1(o), (B.1)where is given by (5)and where ( ) is
the gradient of the
pole/zero with respect to the parameters. This gradient is given
bythe next lemma.
Lemma B.1. Let za(a) be a zero of A(q, a) of multiplicity1.
Then
dza(a)
d a
a=oa
= zoaAo(zoa ) na (zoa ),
wheren(q)= [q1, . . . , qn]T. For zeros of the other
polynomialsB, C , D and F we get analogous expressions.
Proof. The proof can be found in, e.g., Oppenheim and
Schafer(1989).
Now we return to the expression(B.1)and consider a zero
ofB(q),which is the most straightforward case. The result for the
othercases will be commented at the end of the proof. Consider
thefunction J( )= zb(b), which does not depend on a, c, d andf.
Thus, fromLemma B.1,
(o)=
0na1
zobBo(zob ) nb (zob )0nc10nd10nf1
.It is now readily verified that
1(zob )
Ho(zob )Bo(z
ob )
Go(
zob )
So(
zob )
R(zo
b ) =
0nb (zob )
0
00
(B.2)
and hence 1(zob )L(z
ob )= (o)with L(z)given inTable 1since
So(zob )=1 regardless of the feedback. Thus, we can write
(B.1)as
AsVarzo =o|L(zob )|21 (zob ), 11(zob ). (B.3)Now, using (A.3),
we recognize 1 (), 11(z) as thereproducing kernel to the rowspace
to and can be written as(A.1),i.e.(9).This now gives the
result(8)inTheorem 3.1.
The other cases A, C, D and Ffollow in the same way, exceptfor
one detail which is explained here. For brevity only the case
Ais considered here but the result holds also for the other
cases.It should first be noted that is singular atzoa . This
singularity iscanceled by the factor Ao in the function L ,
seeTable 1, and westill have that 1(z
oa )L(z
oa ) = (o). This pole/zero cancellation
between L and K i must be made for the expression (8) to
makesense.
Appendix C. Proof ofLemma 3.5
First we note that existence of Ry and Ru satisfying (15)is
ensured by the spectral factorization theorem. Poles on theunit
circle can be extracted before the spectral factorization and
reinserted afterwards and are thus left unchanged.
Furthermore,notice that byStanding Assumptions 2.1, R has all zeros
strictlyinside the unit circle. Thus the right-hand sides of the
equationsin(15)are non-zero on the unit circle and thus Ry and Ru
can betaken to have all their zeros strictly inside the unit
circle.
Consider now a zero ofBo. Lemma 3.4 gives that the
asymptoticvariance when only b and f are used is no greater than
theasymptotic variance when allparameters areused. Considering
thecase when only band fare used will hence give a lower bound.
Forthis case, it is straightforward to verifythat
(ej)(ej)=(ej)(ej) where
G oSoRuHo
1
BoTnb
1
FoTnf
Tand that
(zob ) Ho(z
ob )Bo(z
ob )
Go(zob )So(z
ob )Ru(z
ob )
=nb (zob )
0
.
Thus, if we consider a zero ofBwe can, analogously to the proof
ofTheorem 3.1,write(B.1)as
AsVarzo =o|L(zob )|2(zob ), 1(zob ), (C.1)with L(z)=
zHo(z)/(Go(z)So(z)Ru(z)). Since So(zob )= 1 we canremove So from L.
Now
(), 1(z) is the reproducingkernel for the rowspace of . However,
since Boand Foare coprimethis is thesame subspace as the one
generated by GoSoRu
BoFoHonb+nf, see
Ninness and Hjalmarsson(2004). This proves(13)for zeros ofBo.The
proofs for zeros of the other polynomials are analogous.
Appendix D. Proof ofCorollary 3.6
That we have equality in (13)when only b and f are used,i.e. for
FIR and OE models, follows directly from the proof ofLemma 3.5.
We now turn to the BoxJenkins case when(16)holds. Then
=
GoHo
So
BoRnb (q)
KGoSo
Bo
o nb (q)
0 1Co
o nc(q)
01
Doo nd (q)
GoHo
SoFo
Rnf (q) KGoSo
Foo nf (q)
.
-
8/11/2019 Artigo erro varincia identificao.pdf
13/14
-
8/11/2019 Artigo erro varincia identificao.pdf
14/14
J. Mrtensson, H. Hjalmarsson / Automatica 45 (2009) 25122525
2525
For thelower bound (25) we invoke Lemma 3.5 and then notice
that Lemma A.6 is applicable toKlb(zo,zo) under the conditions
in
the theorem. Evaluation ofLlbfor AousingTable 2now
gives(25).
Appendix I. Proof ofTheorem 6.1
The proof parallels the proof ofTheorem 5.1,see Appendix H
but in the proof of(30) L is evaluated for Bo instead.
Similarly, inthe proof of(31),Llb is evaluated forBousingTable
2.
That equality holds in(31)for OE and FIR models as well as
forBoxJenkins models subject to (16) follows from Corollary 3.6.
Thisconcludes the proof.
References
Agero, J., & Goodwin, G. (2007). Choosing between open- and
closed-loopexperiments in linear system identification. IEEE
Transactions on AutomaticControl,52(8), 14751480.
Bombois, X., Gevers, M., & Scorletti, G. (2005). Open-loop
versus closed-loopidentification of BoxJenkins models: A new
variance analysis. In 44th IEEEconference on decision and control
and the European control conference 2005 (pp.31173122).
Bombois, X., Scorletti, G., Gevers, M., Van den Hof, P., &
Hildebrand, R. (2006). Leastcostly identification experiment for
control.Automatica,42(10), 16511662.
Forssell, U., & Ljung, L. (1999). Closed-loop identification
revisited. Automatica,35(7), 12151241.
Gevers, M., Bazanella, A. S., Bombois, X., & Miskovic, L.
(2009). Identification andthe information matrix: How to get just
sufficiently rich? IEEE Transactions onAutomatic Control(in press).
To appear December 2009.
Gevers, M., Ljung, L., & Van den Hof, P. (2001). Asymptotic
variance expressions forclosed-loop
identification.Automatica,37(5), 781786.
Grenander, U., & Szeg, G. (1958).Toeplitz forms and their
applications. Berkley, CA:University of California Press.
Heuberger, P., Wahlberg, B., & den Hof, P. V. (Eds.).
(2005). Modeling andidentification with rational orthogonal basis
functions. Springer Verlag.
Hjalmarsson, H., & Lindqvist, K. (2002). Identification of
performance limitations incontrol using ARX-models. InProceedings
of The 15th IFAC world congress.
Hjalmarsson,H., & Mrtensson,J. (2007). A geometricapproach
to varianceanalysisin system identification: Theory and nonlinear
systems. In Proceedings of the46th IEEE conference on decision and
control (pp. 50925097).
Hjalmarsson, H., & Ninness, B. (2006). Least-squares
estimation of a class offrequency functions: A finite sample
variance expression. Automatica, 42(4),
589600.Lindqvist, K. (2001). On experiment design in
identification of smooth linear
systems.Licentiate thesis. Royal Institute of Technology,
Stockholm, Sweden.Ljung, L. (1985). Asymptotic variance expressions
for identified BlackBox transfer
function models.IEEE Transactions Automatic Control,30(9),
834844.Ljung, L. (1999).System identification: Theory for the
user(second ed.). Prentice Hall.Mrtensson, J., & Hjalmarsson,
H. (2003). Identification of performance limitations
in control using general SISO-models. In Proceedings of the 13th
IFAC symposiumon system identification(pp. 519524).
Mrtensson, J., & Hjalmarsson, H. (2005a). Closed loop
identification of unstablepoles and non-minimum phase zeros. In
Proceedings of the 16th IFAC worldcongress on automatic
control.
Mrtensson, J., & Hjalmarsson, H. (2005b). Exact
quantification of the variance ofestimatedzeros.In Proceedingsof
the 44thIEEE conferenceon decision and controland European control
conference (pp. 42754280).
Mrtensson,J., & Hjalmarsson,H. (2007). A geometricapproach
to varianceanalysisin system identification: Linear time-invariant
systems. In Proceedings of the46th IEEE conference on decision and
control (pp. 42694274).
Mrtensson, J., Jansson,H., & Hjalmarsson,H. (2005).Input
design for identificationof zeros. InProceedings of the 16th IFAC
world congress on automatic control.
Ninness,B., & Gustafsson,F. (1997).A unifyingconstructionof
orthonormalbasesforsystem identification.IEEE Transactions on
Automatic Control,42(4), 515521.
Ninness, B., & Hjalmarsson, H. (2004). Variance error
quantifications that are exactfor finite model order. IEEE
Transactions on AutomaticControl, 49(8), 12751291.
Ninness, B., & Hjalmarsson, H. (2005a). Analysis of the
variability of jointinputoutput estimation
methods.Automatica,41(7), 11231132.
Ninness,B., & Hjalmarsson,H. (2005b).On thefrequency domain
accuracyof closed-loop estimates.Automatica,41(7), 11091122.
Ninness, B., Hjalmarsson, H., & Gustafsson, F. (1998).
Generalized Fourier andToeplitz results for rational orthonormal
bases. SIAM Journal on Control andOptimization,37(2), 429460.
Ninness, B., Hjalmarsson, H., & Gustafsson, F. (1999a).
Asymptotic varianceexpressions for output error model structures.
In14th IFAC world congress, Vol.H(pp. 367372).
Ninness, B., Hjalmarsson, H., & Gustafsson, F. (1999b). The
fundamental roleof general orthonormal bases in system
identification. IEEE Transactions onAutomatic Control,44(7),
13841406.
Oppenheim, A., & Schafer, R. (1989). Discrete-time signal
processing. EnglewoodCliffs, NJ: Prentice-Hall.
Rudin, W. (1987).Real and complex analysis(third ed.).
McGraw-Hill, Inc..Skogestad, S., & Postlethwaite, I. (1996).
Multivariable feedback controlAnalysis and
design. Chichester: John Wiley.Sderstrm, T., & Stoica, P.
(1989). Prentice Hall International series in systems and
control engineering,System identification.Vuerinckx, R.,
Pintelon, R., Schoukens, J., & Rolain, Y. (2001). Obtaining
accurate
confidence regions for the estimated zeros and poles in system
identification
problems.IEEE Transactions on Automatic Control,46(4),
656659.Xie, L., & Ljung, L. (2001). Asymptotic variance
expressions for estimated frequencyfunctions.IEEE Transactions on
Automatic Control,46(12), 18871899.
Xie, L., & Ljung, L. (2004). Variance expressions for
spectra estimated using auto-regressions.Journal of
Econometrics,118(12), 247256.
Jonas Mrtenssonreceived his M.Sc. degree in VehicleEngineering
and his Ph.D. degree in Automatic Controlfrom KTH Royal Institute
of Technology, Stockholm,Sweden, in 2002 and 2007 respectively.
Since 2007 heis a researcher at the School of Electrical
Engineering atKTH. His research interests include system
identification,presently focusing on modeling and control of
internalcombustion engines.
Hkan Hjalmarsson was born in 1962. He received theM.S. degree in
Electrical Engineering in 1988, and theLicentiate degree and the
Ph.D. degree in AutomaticControl in 1990 and 1993, respectively,
all from LinkpingUniversity,Sweden.He hasheld visitingresearch
positionsat California Institute of Technology, Louvain
Universityand at the University of Newcastle, Australia. He
hasserved as an AssociateEditor for Automatica (19962001),and IEEE
Transactions on Automatic Control (20052007)and has been Guest
Editor for European Journal of Controland Control Engineering
Practice. He is Professor at the
School of Electrical Engineering, KTH, Stockholm, Sweden. He is
Chair of the IFACTechnical Committee on Modeling, Identification
and Signal Processing. In 2001 hereceived the KTH award for
outstanding contribution to undergraduate education.His research
interests include system identification, signal processing, control
andestimation in communication networks and automated tuning of
controllers.