-
8/18/2019 ATPS - Projetos de Máquinas
1/10
-
8/18/2019 ATPS - Projetos de Máquinas
2/10
Figura 2 - Atração e repulsão de bobinas e ímãs
0 ideia b&sica de um motor de é montar uma bobina
entre os polos de um imã
permanente ou então uma bobina fia que funcione como tal,
conforme figura 1.
Figura 3 - Estrutura de um motor
Partindo então da posi"ão inicial, em que os polos da bobina
m-vel +rotor, ao
ser percorrido por uma corrente, estão alinhados com o imã
permanente temos a
manifesta"ão de uma for"a de repulsão. 2sta for"a de repulsão
fa! o con%unto m-vel
mudar de posi"ão conforme mostra a figura 3.
Figura 4 - Com a repulsão o rotor tende a girar
-
8/18/2019 ATPS - Projetos de Máquinas
3/10
0 tend$ncia do rotor é dar meia volta para seu polo 4orte
se aproime do polo
'ul do imã permanente. Da mesma forma, seu polo 'ul se
aproimar& do polo 4orte
pelo qual ser& atraído.
4o entanto, no eio do rotor, por onde passa a corrente que
circula pela
bobina, eiste um comutador. 0 finalidade deste comutador é
inverter o sentido da
circula"ão da corrente na bobina, fa!endo com que os polo mudem.
*bserve a
figura 5.
Figura 5 - Com a inversão de polaridade os polos do rotor
mudam
* resultado disso ser& uma transforma"ão da for"a de atra"ão
em repulsão, o
que far& com que o rotor continue seu movimento, passando
6direto6 pela posi"ão
que seria de equilíbrio.
'ua nova posi"ão de equilíbrio seria obtida com mais volta, de
modo que os
polos do rotor se defrontassem com os de nome oposto do imã
fia.
#ais meia volta, e quando isso poderia ocorrer, a nova posi"ão
fa! com que o
comutador entre em a"ão e temos nova comuta"ão da corrente. Com
isso os polos
se invertem conforme mostra a figura 7.
-
8/18/2019 ATPS - Projetos de Máquinas
4/10
Figura - !ais de meia volta tem nova inversão de polos
* resultado disso é que o rotor não para, pois deve continuar em
busca de
sua posi"ão de equilíbrio.
2videntemente isso nunca vai acontecer, e enquanto houver
corrente
circulando pela bobina o rotor não vai parar.
0 velocidade de rota"ão deste tipo de motor não depende de
nada a não ser
da for"a que o rotor tenha de fa!er para girar. Desta forma, os
pequenos motores de
corrente contínua t$m uma velocidade muito maior quando giram
livremente do que
quando girar fa!endo algum tipo de esfor"o +movimento alguma
coisa.
8gualmente, a corrente eigida pelo motor depende da oposi"ão que
o rotor encontra
para sua movimenta"ão. Fa!endo mais for"a, o consumo aumento
sensivelmente.
CARACTERÍSTICAS
Dado o princípio de funcionamento, as características dos
pequenos motores
admitem certo grau de fleibilidade.
Desta forma, a for"a que um pequeno motor pode fa!er depende da
tensão
aplicada ( sua bobina a qual vai determinar a corrente
circulante e, portanto a
intensidade do campo magnético criado, conforme mostra a figura
9.
-
8/18/2019 ATPS - Projetos de Máquinas
5/10
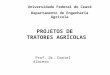
Figura " - Comportamento típico de um pe#ueno motor de corrente
contínua
Pequenos motores são especificados não propriamente para uma
determinada tensão, mas sim para certa faia de tens:es,
normalmente dando;se ovalor médio. 0ssim, um motor indicado para
funcionar com 1 < pode, na realidade
operar com tens:es na faia de ),5 a 3,5 .
Figura $ - % controle de velocidade aumenta a tensão& #uando
a velocidade cai
2ste circuito pode manter a velocidade mais ou menos constante
detectando
as varia":es da intensidade da corrente na bobina %& que,
conforme vimos, elas são
determinadas pela velocidade e pelo esfor"o. ?uando a velocidade
vai, em vista de
-
8/18/2019 ATPS - Projetos de Máquinas
6/10
um esfor"o maior, a corrente tende a aumentar. Fornecendo uma
corrente maior o
motor recupera sua velocidade.
0lguns motores usados em aplica":es mais críticos possuem
uma bobina
denominada 6tacmetro6, conforme mostra a figura @.
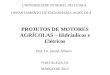
Figura ' - (m motor com diversas bobinas& sendo uma com
sensor para controlar a
velocidade
Por este bobina é possível 6sentir6 a velocidade do motor e usar
o sinal
gerado para acionar um dispositivo eterno de controle.
4ormalmente, as velocidades de opera"ão dos pequenos motores
sãoelevadas e para os casos em que necessitado de mais for"a e de
um movimento
mais lento, precisa contar com recursos para a chamada
redu"ão.
2m toca;discos e toca;fitas é comum o uso de correias e polias
para esta
finalidade, conforme mostra a figura )A.
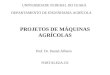
Figura 1) - !odo de se *a+er uma redução de velocidade de um
motor
0 redu"ão é facilmente calculada bastando para isso medir
o diâmetro do eio
do motor e o diâmetro da polia maior. 0 rela"ão entre os dois
valores indica a taa de
redu"ão e, portanto o fator pelo qual ficar& multiplicado o
torque do motor.
-
8/18/2019 ATPS - Projetos de Máquinas
7/10
'e tivermos um eio de / mm e uma polia de / cm de diâmetro, por
eemplo,
teremos uma taa de redu"ão de )A para ). 8sso significa que a
for"a fica
aumentada em )A ve!es e a velocidade fica redu!ida em )A
ve!es.
'istemas mais sofisticados incluem o uso de engrenagens como,
por
eemplo, a caia de redu"ão mostrada na figura )) e que é indicada
para pro%etos
de rob-tica e automa"ão.
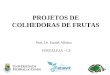
Figura 11 - Cai,a de redução com engrenagens
0 rela"ão entre os dentes das engrenagens do eio do motor
e das redu":es
mostram o que ocorre com a for"a e a velocidade.
MOTOR DE CORRENTE ALTERNADA (CA)
*s motores C0, em sua maioria, t$m características de
funcionamento
semelhantes (s dos motores CC, embora o seu funcionamento este%a
menos su%eito
a defeitos. 8sto porque os motores CC apresentam problemas na
comuta"ão que
envolve as escovas, os porta;escovas, o plano neutro etc. #uitos
tipos de motores
-
8/18/2019 ATPS - Projetos de Máquinas
8/10
C0 nem mesmo usam anéis coletores, e assim podem proporcionar
um
funcionamento livre de defeitos durante períodos bastante
longos. Contudo, os
motores C0 s- trabalham bem dentro de uma faia estreita de
velocidades. *s
motores C0 apresentam características ecelentes para a opera"ão
a velocidades
constantes, porque a velocidade é determinada pela frequ$ncia da
rede de
alimenta"ão e o nBmero de polos do motor.
*s motores C0 podem ser trif&sicos ou monof&sicos. *
princípio de
funcionamento é o mesmo em todos os casos, isto é, o de um campo
magnético
girante que provoca a rota"ão do rotor da m&quina. *s
motores C0 são classificados
geralmente em dois tipos principais +) motores de indu"ão e +/
motores síncronos.* motor síncrono é um alternador funcionando como
motor aplica;se C0 ao estator
e CC ao rotor. * motor de indu"ão difere do motor síncrono por
não ter o seu rotor
ligado a qualquer fonte de alimenta"ão, sendo o seu rotor
alimentado por indu"ão
magnética.
* motor de indu"ão é o motor C0 mais usado, por causa de sua
simplicidade,
constru"ão robusta, baio custo de fabrica"ão e boas
características de
funcionamento. 2stas características do motor de indu"ão
resultam do fato de ser o
rotor uma unidade autossuficiente que não necessita de cone:es
eternas. * nome
do motor de indu"ão é derivado do fato de serem indu!idas
correntes alternadas no
circuito do rotor, pelo campo magnético girante produ!ido nas
bobinas do estator.
Figura 12 !otores de indução .ipos de rotores
-
8/18/2019 ATPS - Projetos de Máquinas
9/10
-
8/18/2019 ATPS - Projetos de Máquinas
10/10
REFERÊNCIAS BIBLIOGRÁFICAS
http://www.newtoncbraga.com.br/index.php/como-funciona/3414-art476a
http://www.newtoncbraga.com.br/index.php/como-funciona/3414-art476ahttp://www.newtoncbraga.com.br/index.php/como-funciona/3414-art476a