Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DE VIÇOSA
DEPARTAMENTO DE ENGENHARIA DE
PRODUÇÃO E MECÂNICA
MEC 460 – VIBRAÇÕES MECÂNICAS
CAP 2 – VIBRAÇÃO LIVRE DE SISTEMAS COM UM
GRAU DE LIBERDADE
PROFª JÉSSICA PONTES RANGEL
1
Introdução
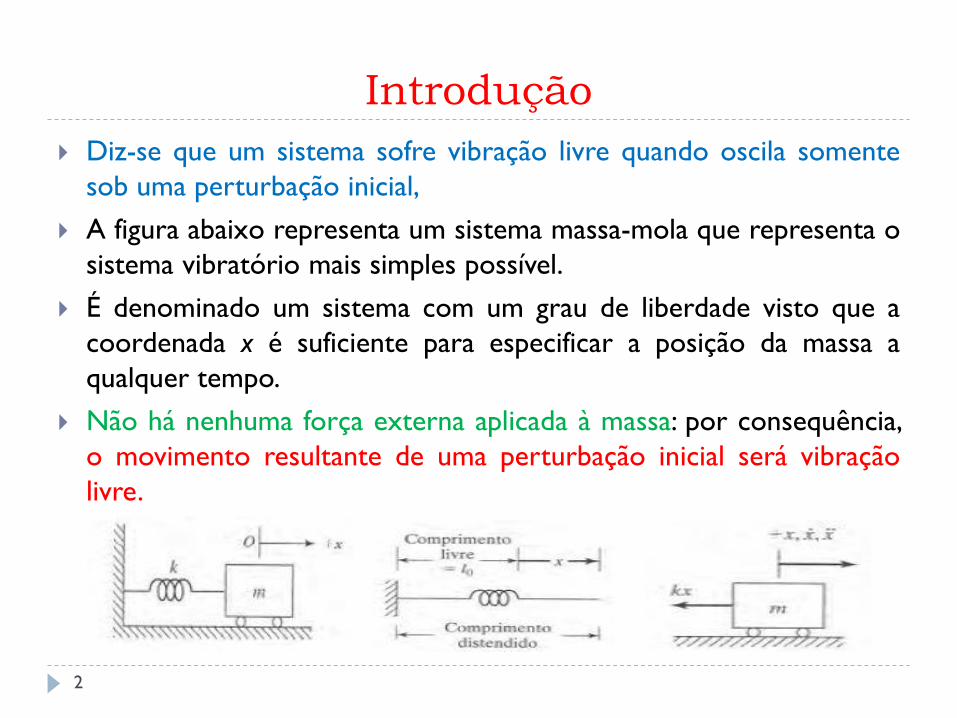
Diz-se que um sistema sofre vibração livre quando oscila somente
sob uma perturbação inicial,
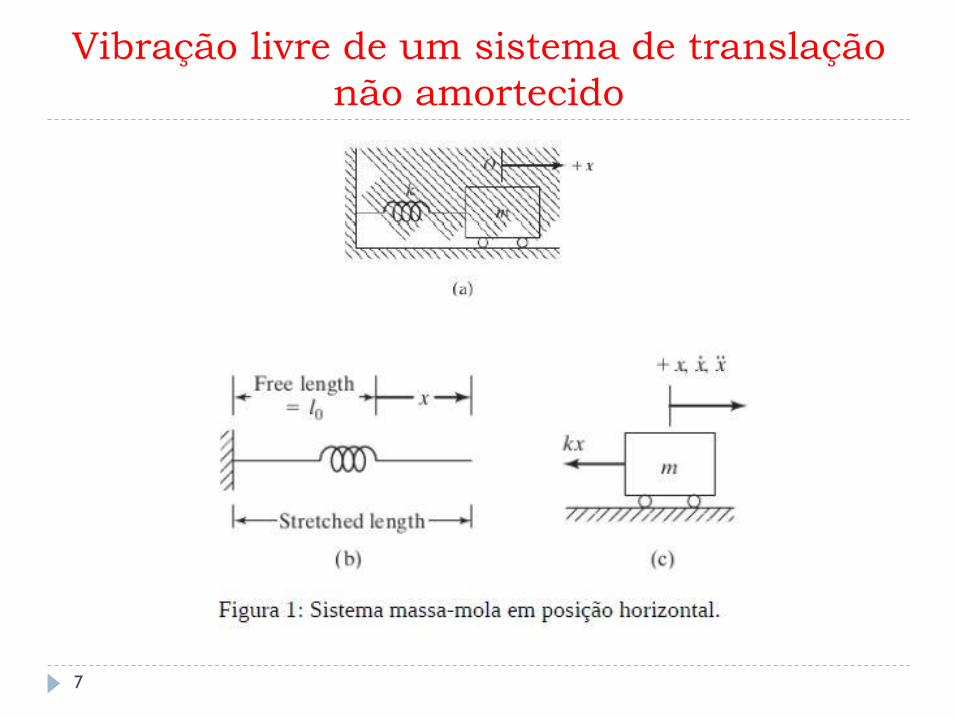
A figura abaixo representa um sistema massa-mola que representa o
sistema vibratório mais simples possível.
É denominado um sistema com um grau de liberdade visto que a
coordenada x é suficiente para especificar a posição da massa a
qualquer tempo.
Não há nenhuma força externa aplicada à massa: por consequência,
o movimento resultante de uma perturbação inicial será vibração
livre.
2
Introdução
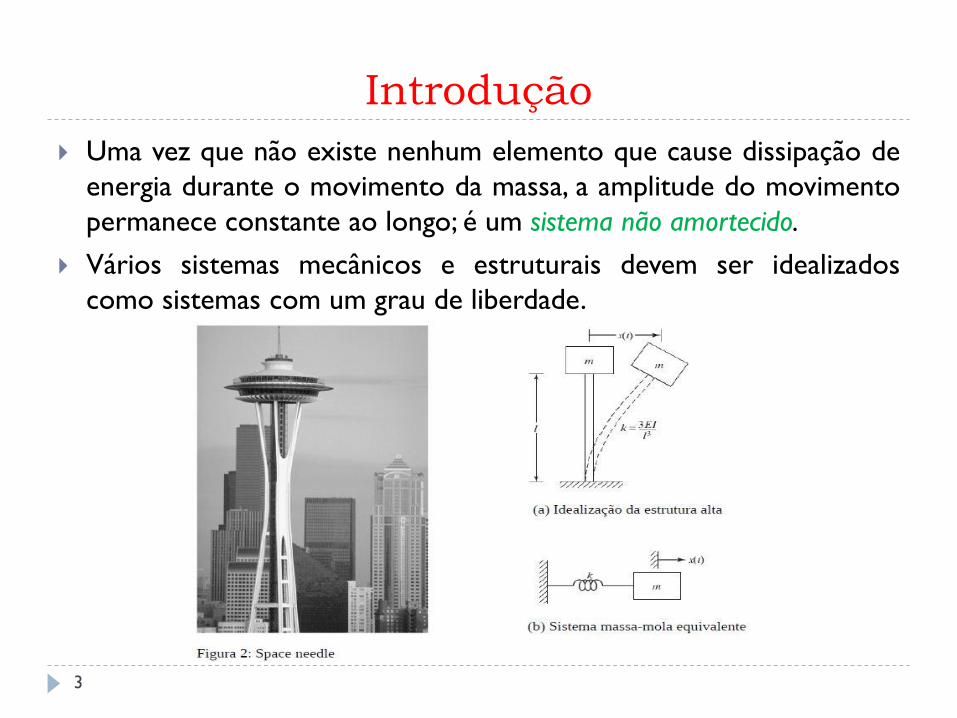
Uma vez que não existe nenhum elemento que cause dissipação de
energia durante o movimento da massa, a amplitude do movimento
permanece constante ao longo; é um sistema não amortecido.
Vários sistemas mecânicos e estruturais devem ser idealizados
como sistemas com um grau de liberdade.
3
Vibração livre de um sistema de translação
não amortecido
Equação do movimento pela 2ª lei do movimento de Newton
O procedimento que usaremos pode ser resumido da seguinte maneira:
1. Selecione uma coordenada adequada para descrever a posição da massa ou do corpo rígido do sistema.
2. Determine a configuração de equilíbrio estático do sistema.
3. Desenhe o diagrama do corpo livre da massa ou corpo rígido.
4. Aplique a segunda lei de Newton à massa ou ao corpo rígido mostrada no diagrama de corpo livre.
4

Vibração livre de um sistema de translação
não amortecido
Assim, se a massa m for deslocada por uma distância 𝑥 (𝑡) quando
uma força resultante 𝐹 (𝑡) agir sobre ela na mesma direção, a
segunda lei do movimento de Newton resulta em
Se a massa m for constante, essa equação se reduz
5
Vibração livre de um sistema de translação
não amortecido
Para um corpo rígido sujeito ao movimento rotacional, a lei de
Newton resulta em
Aplicando o procedimento a um sistema não amortecido com grau
de liberdade, temos
Massa apoiada sobre roletes sem atrito;
Movimentação de translação horizontal;
Há uma força kx na mola quando a massa é deslocada de uma distância +x;
DCL pode ser representada pela figura (1.c).
6
Vibração livre de um sistema de translação
não amortecido
7

Vibração livre de um sistema de translação
não amortecido
Equação do movimento por outros métodos
As equações de movimento de um sistema vibratório podem ser derivadas por vários métodos
Princípio de D’Alembert;
Princípio dos deslocamentos virtuais;
Princípio da conservação de energia.
8

Vibração livre de um sistema de translação
não amortecido
Princípio dos deslocamentos virtuais
O princípio dos deslocamentos virtuais afirma que “se um
sistema que está em equilíbrio sob a ação de um conjunto de forças
for submetido a um deslocamento virtual, então o trabalho virtual
total realizado pelas forças será zero”.
O deslocamento virtual é definido como um deslocamento
infinitesimal imaginário que ocorre instantaneamente.
9

Vibração livre de um sistema de translação
não amortecido
Princípio dos deslocamentos virtuais
Trabalho virtual: trabalho realizado por todas as forças,
incluindo as forças de inércia no caso de um problema
dinâmico, devido a um deslocamento virtual.
10
Vibração livre de um sistema de translação
não amortecido
11
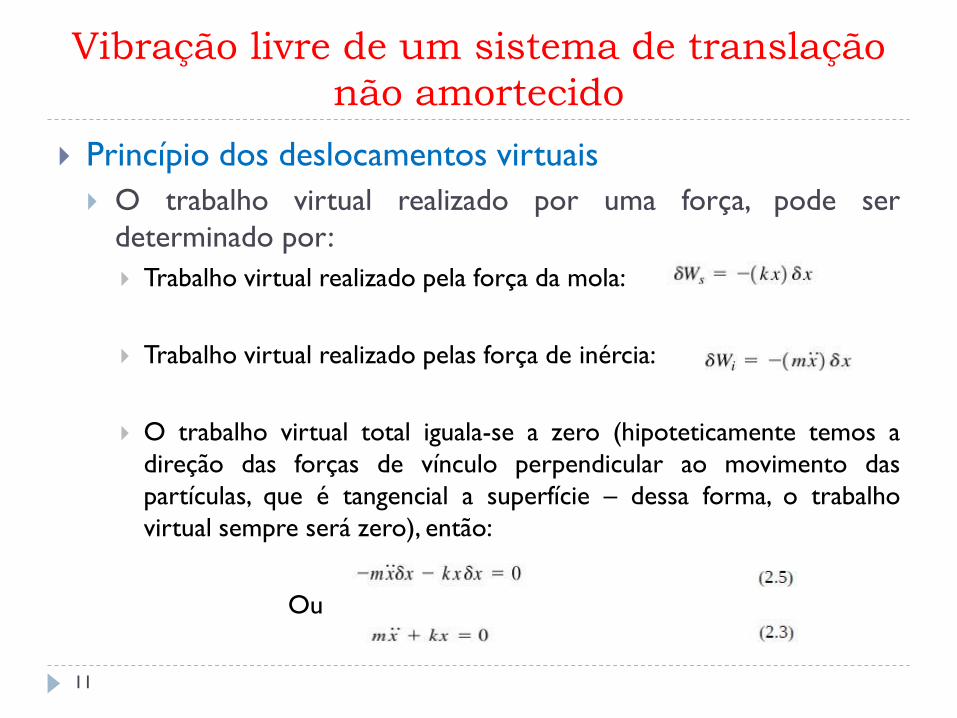
Princípio dos deslocamentos virtuais
O trabalho virtual realizado por uma força, pode ser
determinado por:
Trabalho virtual realizado pela força da mola:
Trabalho virtual realizado pelas força de inércia:
O trabalho virtual total iguala-se a zero (hipoteticamente temos a
direção das forças de vínculo perpendicular ao movimento das
partículas, que é tangencial a superfície – dessa forma, o trabalho
virtual sempre será zero), então:
Ou

Vibração livre de um sistema de translação
não amortecido
12
Princípio de D’Alembert
As equações de movimento 2.1 e 2.2 podem ser reescritas
como:
Podemos considerá-las equações de equilíbrio desde que:
sejam tratados como uma força e um momento
Vibração livre de um sistema de translação
não amortecido
13
Princípio de D’Alembert
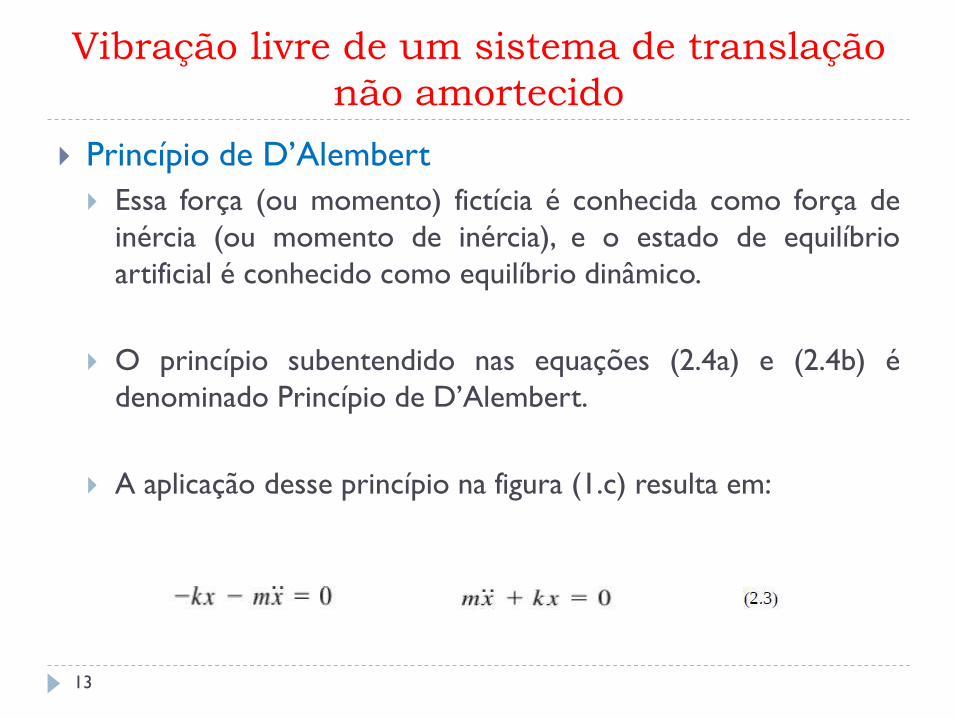
Essa força (ou momento) fictícia é conhecida como força de
inércia (ou momento de inércia), e o estado de equilíbrio
artificial é conhecido como equilíbrio dinâmico.
O princípio subentendido nas equações (2.4a) e (2.4b) é
denominado Princípio de D’Alembert.
A aplicação desse princípio na figura (1.c) resulta em:

Vibração livre de um sistema de translação
não amortecido
14
Princípio da Conservação de Energia
Considera-se um sistema conservativo: nenhuma energia é perdida devido à atrito ou membros não elásticos.
A energia dos sistema permanecerá constante se nenhum trabalho for realizado sobre o sistema conservativo.
Visto que a energia de um sistema vibratório é parte potencial e parte cinética, a soma dessas duas energias devem permanecer constantes.
A energia cinética T é armazenada na massa em virtude de sua velocidade.
Vibração livre de um sistema de translação
não amortecido
15
Princípio da Conservação de Energia
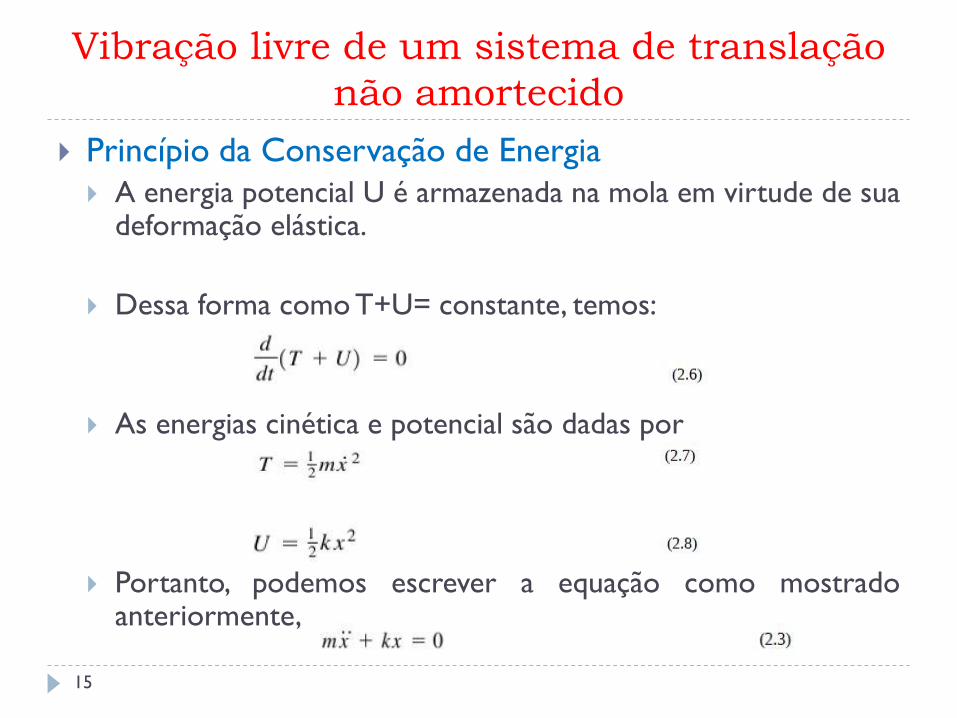
A energia potencial U é armazenada na mola em virtude de sua deformação elástica.
Dessa forma como T+U= constante, temos:
As energias cinética e potencial são dadas por
Portanto, podemos escrever a equação como mostrado anteriormente,

Vibração livre de um sistema de translação
não amortecido
16
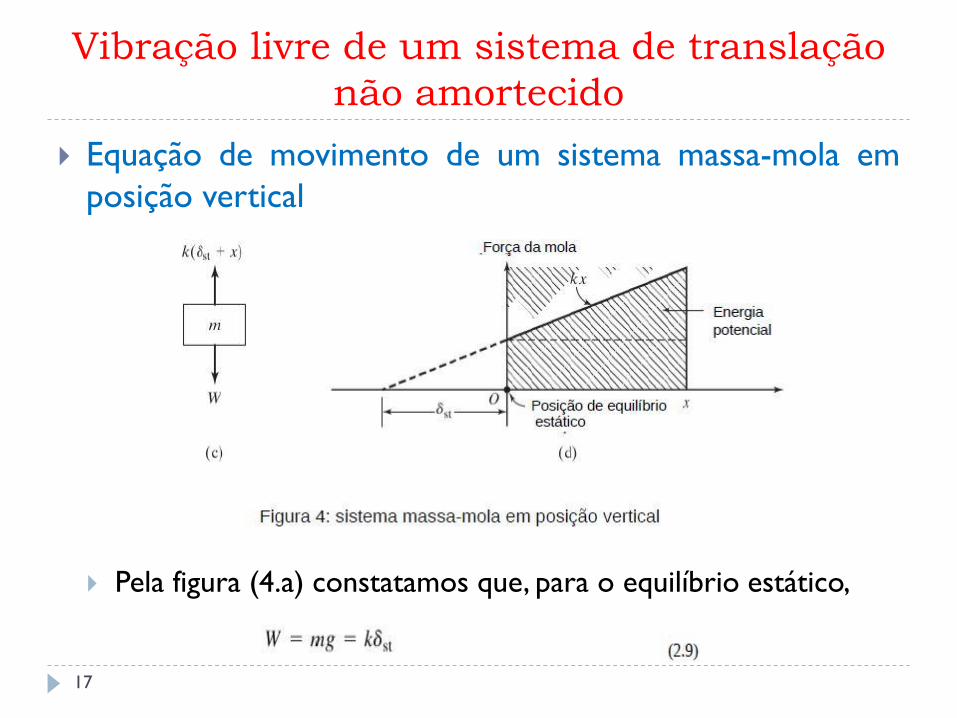
Equação de movimento de um sistema massa-mola em
posição vertical Considere a configuração do sistema na figura (4.a). A massa está pendurada na
extremidade inferior de uma mola cuja extremidade superior está ligada a um
suporte rígido.
Vibração livre de um sistema de translação
não amortecido
17
Equação de movimento de um sistema massa-mola em
posição vertical
Pela figura (4.a) constatamos que, para o equilíbrio estático,
Vibração livre de um sistema de translação
não amortecido
18
Equação de movimento de um sistema massa-mola em
posição vertical
Se a massa sofrer uma deflexão até uma distância +x, então a
força da mola (como mostrado na figura 4c) é:
Visto que k𝛿𝑠𝑡 = 𝑊, obtemos:
Portanto, podemos ignorar o peso de uma massa que se movimenta verticalmente
contanto que seu deslocamento x seja medido em relação à posição de equilíbrio estático.
Vibração livre de um sistema de translação
não amortecido
19
Solução da equação do movimento
Para resolver a equação (2.3), pode-se admitir que
Onde C e s são constantes a determinar. A substituição da
equação (2.11) na equação (2.3), resulta em:
Como C não pode ser zero, temos

Vibração livre de um sistema de translação
não amortecido
20
Solução da equação do movimento
E, por consequência,
Onde 𝑖 = −11
2 e
A equação (2.12) é denominada equação característica;
Os dois valores de s são as raízes da equação característica
(chamados autovalores do problema);

Vibração livre de um sistema de translação
não amortecido
21
Solução da equação do movimento
Uma vez que ambos os valores de s satisfazem a equação
(2.12), a solução geral da equação (2.3) pode ser expressa
como
Onde 𝐶1 𝑒 𝐶2 são constantes. Usando as identidades
A equação (2.15) pode ser reescrita como
Onde 𝐴1 𝑒 𝐴2 são novas constantes. Todas as constantes
podem ser determinadas pelas condições iniciais do sistema.
Vibração livre de um sistema de translação
não amortecido
22
Solução da equação do movimento
O número de condições a especificar é igual à ordem a
equação diferencial governante.
No caso, se os valores de deslocamento e da velocidade forem
especificados como 𝑥0 𝑒 𝑥 0 𝑒𝑚 𝑡 = 0, temos que pela equação
(2.16)
Assim, a solução da equação (2.3) sujeita às condições iniciais
da equação (2.17) é dada por

Vibração livre de um sistema de translação
não amortecido
23
Movimento Harmônico
Vibração livre de um sistema de translação
não amortecido
24
Movimento Harmônico
A quantidade 𝜔𝑛 representa a frequência natural de vibração
do sistema.
A equação (2,16) pode ser escrita de maneira diferente com a
introdução da notação:
Onde 𝐴 𝑒 𝜑 são as novas constantes, que podem ser expressas
como:

Vibração livre de um sistema de translação
não amortecido
25
Movimento Harmônico
Introduzindo a equação (2.19) na equação (2.16), a solução
pode ser escrita como:
Usando as relações:
A equação (2.16) pode ser expressa como:
Vibração livre de um sistema de translação
não amortecido
26
Movimento Harmônico
Onde
e
O ângulo de fase também pode ser interpretado como o
ângulo entre a origem e o primeiro pico.
Vibração livre de um sistema de translação
não amortecido
27
Movimento Harmônico
Observe os seguintes aspectos do sistema massa-mola:
1. Se o sistema massa-mola estiver em uma posição vertical, como
mencionado anteriormente, a frequência natural pode ser expresso
como:
A constante elástica da mola k, pode ser expressa em termos da
massa m
Substituindo o valor de k na equação (2.26) temos:

Vibração livre de um sistema de translação
não amortecido
28
Movimento Harmônico
Por consequência, a frequência natural em ciclos por segundo e o
período natural são dados por
Assim, quando a massa vibra em sentido vertical, podemos calcular a
frequência natural e o período de vibração pela simples medição da
deflexão estática 𝛿𝑠𝑡 . Não é necessário saber qual é a rigidez da mola k,
e a massa m.

Vibração livre de um sistema de translação
não amortecido
29
Movimento Harmônico
2. Pela equação (2.21), a velocidade e a aceleração da massa m pode
ser obtida como
3. Se o deslocamento inicial for zero, a equação (2.21) torna-se
Contudo, se a velocidade inicial for zero, a solução torna-se

Vibração livre de um sistema torcional não
amortecido
30
Sistema Torcional
Se um corpo rígido oscilar em relação a um eixo de referência específico, o movimento resultante será denominado vibração por torção.
Nesse caso, o deslocamento do corpo é medido em termos de coordenada angular.
Em um problema de vibração por torção, o momento restaurador pode ser resultante da torção e de um membro elástico ou de um momento desbalanceado de uma força ou conjugado.

Vibração livre de um sistema torcional não
amortecido
31
Sistema Torcional
Equação de Movimento
Considerando o diagrama de corpo livre do disco, podemos derivar a
equação de movimento aplicando a segunda lei de movimento de
Newton.
Vibração livre de um sistema torcional não
amortecido
32
Sistema Torcional
Equação de Movimento
A frequência natural do sistema torcional é
E o período e a frequência de vibração em ciclos por segundo são:
Vibração livre de um sistema torcional não
amortecido
33
Sistema Torcional
Solução
A solução geral da equação (2.40) pode ser obtida como no caso da
equação (2.3)
Por consequência, as constantes 𝐴1 𝑒 𝐴2 podem ser determinadas
como
Método da Energia de Rayleigh
34
As frequências naturais do sistema serão determinadas
agora pelo método da energia.
O princípio da conservação de energia pode ser
enunciado novamente como
O índice 1 denota o equilíbrio estático e escolhemos
𝑈1 = 0 como referência energia potencial.
O índice 2 corresponde ao máximo deslocamento da
massa, temos 𝑇2 = 0.

Método da Energia de Rayleigh
35
Assim, a equação (2.55) torna-se
Se o sistema estiver em movimento harmônico,
então𝑇1 𝑒 𝑈2 denotam os valores máximos das energias
cinética e potencial, respectivamente, e a equação (2.56)
torna-se
A aplicação dessa equação, que também é conhecida
como método da energia de Rayleigh, dá a frequência
natural do sistema diretamente.
Vibração Livre com Amortecimento Viscoso
36
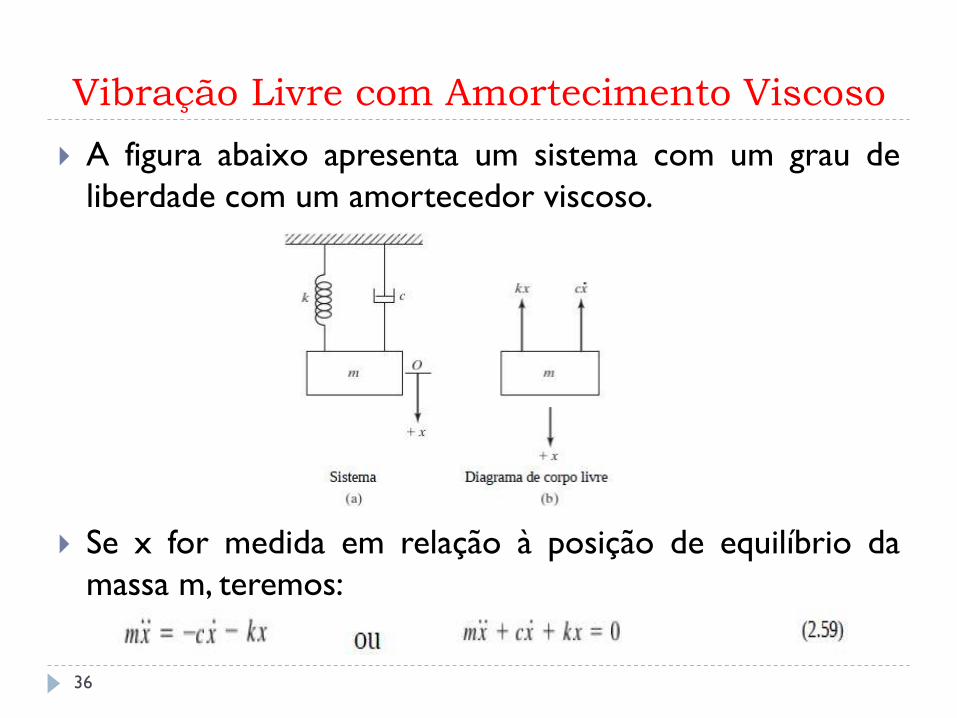
A figura abaixo apresenta um sistema com um grau de
liberdade com um amortecedor viscoso.
Se x for medida em relação à posição de equilíbrio da
massa m, teremos:
Vibração Livre com Amortecimento Viscoso
37
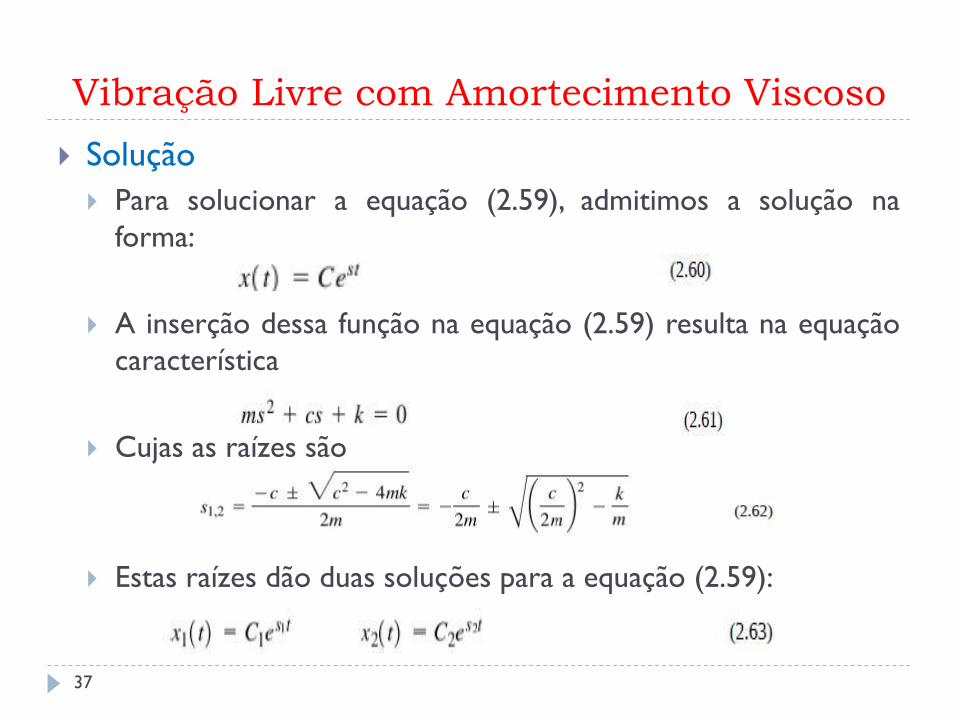
Solução
Para solucionar a equação (2.59), admitimos a solução na
forma:
A inserção dessa função na equação (2.59) resulta na equação
característica
Cujas as raízes são
Estas raízes dão duas soluções para a equação (2.59):
Vibração Livre com Amortecimento Viscoso
38
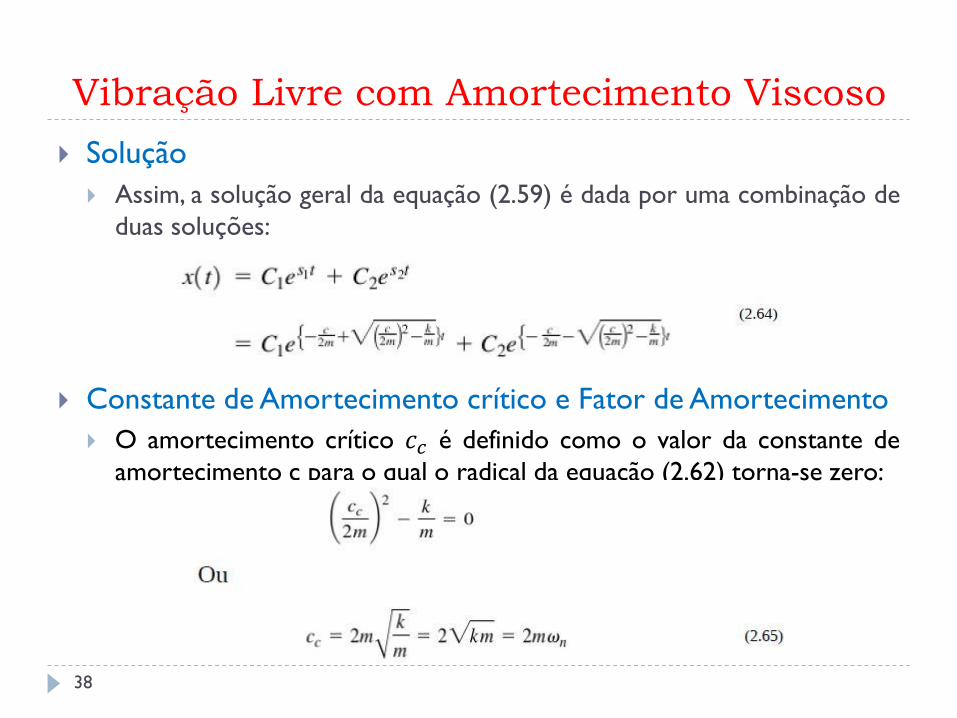
Solução
Assim, a solução geral da equação (2.59) é dada por uma combinação de
duas soluções:
Constante de Amortecimento crítico e Fator de Amortecimento
O amortecimento crítico 𝑐𝑐 é definido como o valor da constante de
amortecimento c para o qual o radical da equação (2.62) torna-se zero:
Vibração Livre com Amortecimento Viscoso
39
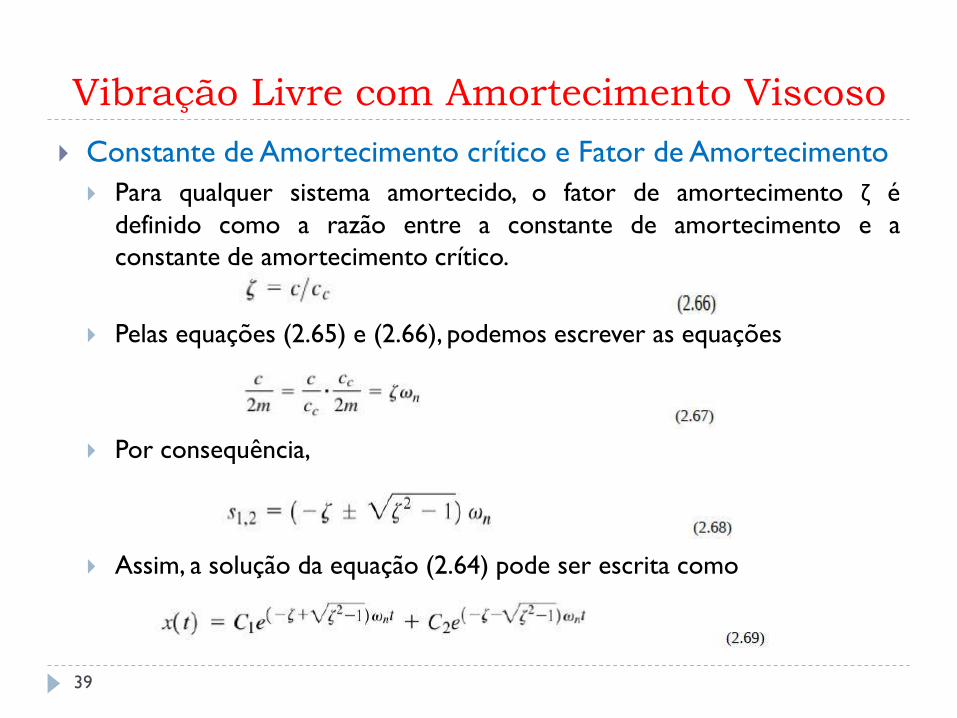
Constante de Amortecimento crítico e Fator de Amortecimento
Para qualquer sistema amortecido, o fator de amortecimento ζ é
definido como a razão entre a constante de amortecimento e a
constante de amortecimento crítico.
Pelas equações (2.65) e (2.66), podemos escrever as equações
Por consequência,
Assim, a solução da equação (2.64) pode ser escrita como

Vibração Livre com Amortecimento Viscoso
40
Caso 1. Sistema criticamente amortecido
(ζ=0 ou 𝑐𝑐 = 𝑐 ou 𝑐 2𝑚 = 𝑘 𝑚 ).
Caso 2. Sistema Superamortecido
(𝜁 > 1 𝑜𝑢 𝑐 > 𝑐𝑐 𝑜𝑢 𝑐 2𝑚 > 𝑘 𝑚 ).
Caso 3. Sistema Subamortecido
(𝜁 < 1 𝑜𝑢 𝑐 < 𝑐𝑐 𝑜𝑢 𝑐 2𝑚 < 𝑘 𝑚 ).

Exercícios
41
Capítulo 2.
2.44/ 2.90/ 2.91/ 2.114/ Exemplo 2.11

42
OBRIGADA!! :D

















![aul [Modo de Compatibilidade] · PDF file Material baseado nos slides de: Marcos José Santana Regina Helena CarlucciSantana ... • balanceamento; • etc. • cada tipo de arquitetura:](https://img.document.onl/doc/110x75/5c4e6b4793f3c304f47c16f4/aul-modo-de-compatibilidade-material-baseado-nos-slides-de-marcos-jose-santana.jpg)